equilibrio-120515140900-phpapp01ffef
DESCRIPTION
equilibrio-120515140900-phpapp01ffefTRANSCRIPT
1º I T I : 1º I T I : 1º I.T.I. : 1º I.T.I. : MECANICA IMECANICA I
TEMA Nº 6: TEMA Nº 6: ESTÁTICAESTÁTICA
EQUILIBRIO DE CUERPOS RÍGIDOSEQUILIBRIO DE CUERPOS RÍGIDOSDepartamento: INGENIERÍA MECÁNICA, ENERGÉTICA Y DE MATERIALESDepartamento: INGENIERÍA MECÁNICA, ENERGÉTICA Y DE MATERIALES
EQUILIBRIO DE CUERPOS RÍGIDOSEQUILIBRIO DE CUERPOS RÍGIDOS
I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
I diI diI.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I IndiceIndice
P t 6 1 I t d ió Punto 6.1 Introducción Punto 6.2 Diagramas de sólido libre
Punto 6.2.1 Idealización de apoyos y conexiones bidimensionales Punto 6.2.2 Idealización de apoyos y conexiones tridimensionales
Punto 6.3 Equilibrio en dos dimensiones Punto 6 3 1 Cuerpo de dos fuerzas (miembros de dos fuerzas) Punto 6.3.1 Cuerpo de dos fuerzas (miembros de dos fuerzas) Punto 6.3.2 Cuerpo de tres fuerzas (miembros de tres fuerzas) Punto 6.3.3 Reacciones hiperestáticas y ligaduras parciales Punto 6.3.4 Resolución de problemas
Punto 6.4 Equilibrio en tres dimensiones
-- 22 --

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
En el capítulo 4 se vio que, en el caso de un cuerpo rígido, el sistema de fuerzas más
6.1 Introducción
p q , p g ,general se puede expresar mediante una fuerza resultante R y un par resultante C.
Por tanto, para que esté en equilibrio un cuerpo rígido deberán anularse la fuerzaresultante R y el par resultante C.y p
Vectorialmente:
0
0
kMjMiMC
kFjFiFR
zyx
zyx
Escalarmente:
000
000
zyx
zyx
MMM
FFF
Estas últimas ecuaciones son condiciones necesarias para el equilibrio de un cuerporígido. Cuando a partir de estas ecuaciones se puedan determinar todas las fuerzas quese ejercen sobre el cuerpo, serán también condiciones suficientes para el equilibrio.
-- 33 --

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Las fuerzas y momentos que se ejercenI.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
- Fuerzas exteriores: Fuerza que sobre un cuerpo rígido ejerce otro cuerpo por contacto
Las fuerzas y momentos que se ejercensobre un cuerpo rígido pueden serexteriores o interiores:
Fuerzas exteriores: Fuerza que sobre un cuerpo rígido ejerce otro cuerpo por contactodirecto o a distancia. Ej.- Peso- Fuerzas interiores: Fuerzas que mantienen unidas las partículas del cuerpo rígido o, siel cuerpo de interés está compuesto de varias partes, las fuerzas que mantienen unidasdi hdichas partes.Las fuerzas exteriores pueden dividirse a su vez, en fuerzas aplicadas yfuerzas de reacción:- Fuerzas aplicadas: Fuerzas que sobre el cuerpo ejercen agentes exteriores.- Fuerzas de reacción: Fuerzas que sobre el cuerpo ejercen los apoyos y las conexiones.
Como las fuerzas interiores son, dos a dos, de igual módulo y recta soportepero de sentidos opuestos, no tendrán efecto sobre el equilibrio del cuerporígido en su conjunto. Por tanto, en este capitulo solo nos ocuparemos de lasfuerzas exteriores y de los momentos que esta originan.
-- 44 --

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I 6.2 Diagramas de sólido libre
La mejor manera de identificar todas las fuerzas que se ejercen sobre el cuerpo dej q j pinterés es seguir el método del diagrama de sólido libre.Este diagrama de sólido libre debe mostrar todas las fuerzas aplicadas y todas lasreacciones vinculares que se ejercen sobre el cuerpo.
Repasamos de nuevo el procedimiento básico:Primer paso: Decidir qué cuerpo o combinación de cuerpos se va a consideraren el DSL.Segundo paso: Preparar un dibujo o esquema del perfil de este cuerpo aisladoo libre.Tercer paso: Seguir con cuidado el contorno del cuerpo libre e identificartodas las f er as q e ejercen los c erpos en contacto o en interacción q e hantodas las fuerzas que ejercen los cuerpos en contacto o en interacción que hansido suprimidos en el proceso de aislamiento.Cuarto paso: Elegir el sistema de ejes de coordenadas a utilizar en laresolución del problema e indicar sus direcciones sobre el DSL.
-- 55 --

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
6 2 1 Idealización de apoyos yI.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
6.2.1 Idealización de apoyos y conexiones bidimensionales
A continuación se indican los tipos habituales de apoyos y conexionesp p y yutilizados en cuerpos rígidos sometidos a sistemas bidimensionales defuerzas, junto con las F y M que se utilizan para representar sus accionessobre el cuerpo rígido en el DSL.
A) Atracción gravitatoriaPeso de cuerpo W.Recta soporte: pasa por el centro de gravedaddel cuerpo y dirigida al centro de la Tierradel cuerpo y dirigida al centro de la Tierra.
B) Hilo, cuerda, cadena o cable flexibleEj i f R d ióEjerce siempre una fuerza R de tracciónsobre el cuerpo.Recta soporte: tangente al hilo, cuerda,cadena o cable flexible en el punto de amarre.
-- 66 --
p

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
C) Conexión rígida (barra)Puede ejercer sobre el cuerpo una fuerza R detracción o de compresión.Recta soporte: dirigida según el eje deRecta soporte: dirigida según el eje deconexión.
D) Bola, rodillo o zapataPueden ejercer sobre el cuerpo una fuerza Rde compresión.Recta soporte: normal a la superficie deapoyo.
-- 77 --

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
E) Superficie lisa (plana o curva)Puede ejercer sobre el cuerpo una fuerza R dePuede ejercer sobre el cuerpo una fuerza R decompresión.Recta soporte: normal a la superficie lisa enel punto de contacto del cuerpo con la
fi isuperficie.
F) Pasador lisoPuede ejercer sobre el cuerpo una fuerza R demódulo R y dirección θ desconocidos.Debido a ello, la fuerza R suele representarseDebido a ello, la fuerza R suele representarseen el DSL mediante sus componentesrectangulares Rx y Ry.
-- 88 --

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
G) Superficie rugosa) p gPueden resistir una fuerza tangencial de rozamiento Rtasí como una fuerza normal de compresión Rn.Debido a ello, la fuerza R es de compresión dirigida
ú á l θ d idsegún un ángulo θ desconocido.La fuerza R suele representarse en el DSL mediante suscomponentes rectangulares Rn y Rt.
H) Pasador en una guía lisaSolo puede transmitir una fuerza R
di l l fi i d l íperpendicular a las superficies de la guía.Se supondrá un sentido para R en el DSLpudiendo ser hacia abajo y a la izda o haciaarriba y a la dcha.
-- 99 --
y

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I) Collar sobre un árbol liso
(Conexión con pasador) (Conexión fija-soldada)(Conexión con pasador) (Conexión fija soldada)
J) Apoyo fijo (empotramiento)Puede ejercer sobre el cuerpo una fuerza R y unmomento M.Como no se conoce ni el módulo ni la direcciónde R, esta suele representarse mediante suscomponentes rectangulares.
-- 1010 --
componentes rectangulares.

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
K) Resorte elástico linealLa fuerza R que ejerce el resorte sobre el cuerpoes proporcional a la variación de longitud delresorte.Sentido: dependiendo si el resorte está alargadoSentido: dependiendo si el resorte está alargadoo acortado.Recta soporte: coincide con el eje del resorte.
L) Polea idealEl pasador que conecta una polea ideal con unmiembro puede ejercer sobre el cuerpo unafuerza R de módulo y dirección desconocidosfuerza R de módulo y dirección desconocidos.Como el pasador es liso, la tensión T del cableserá constante para satisfacer el equilibrio demomentos respecto al eje de la polea.
-- 1111 --
I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 6 1PROBLEMA 6 1I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I PROBLEMA 6.1PROBLEMA 6.1
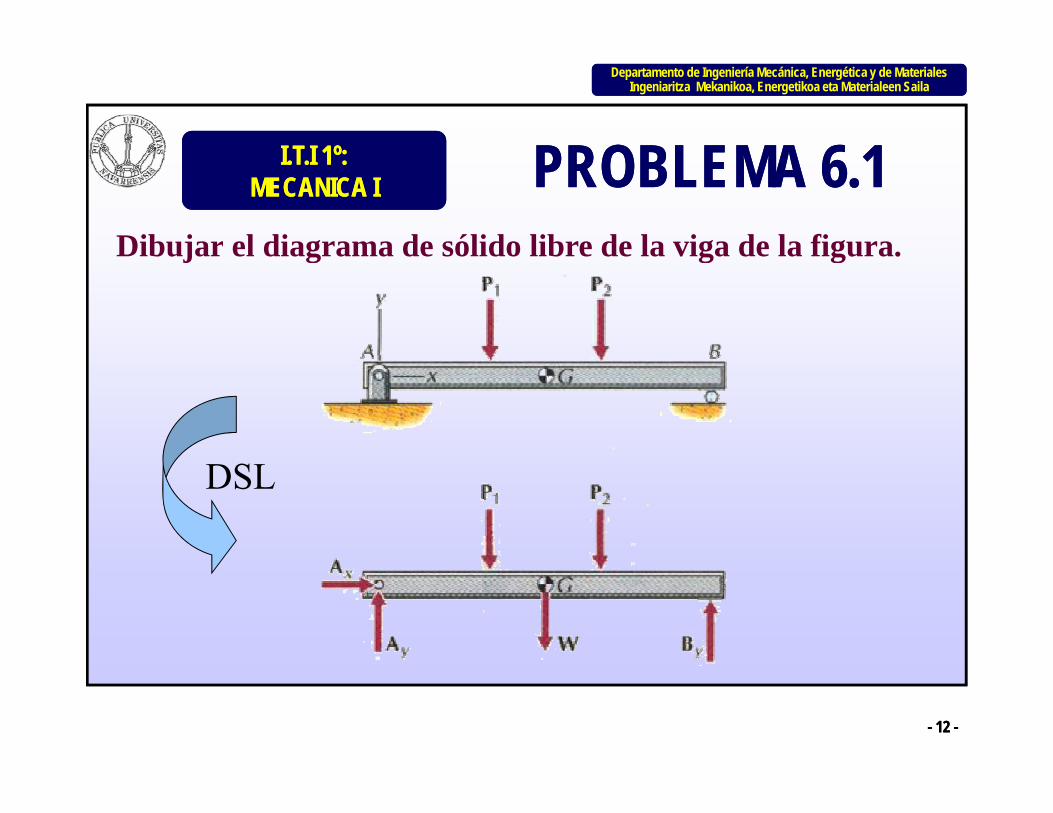
Dibujar el diagrama de sólido libre de la viga de la figura.Dibujar el diagrama de sólido libre de la viga de la figura.
DSL
-- 1212 --
I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 6 2PROBLEMA 6 2I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I PROBLEMA 6.2PROBLEMA 6.2
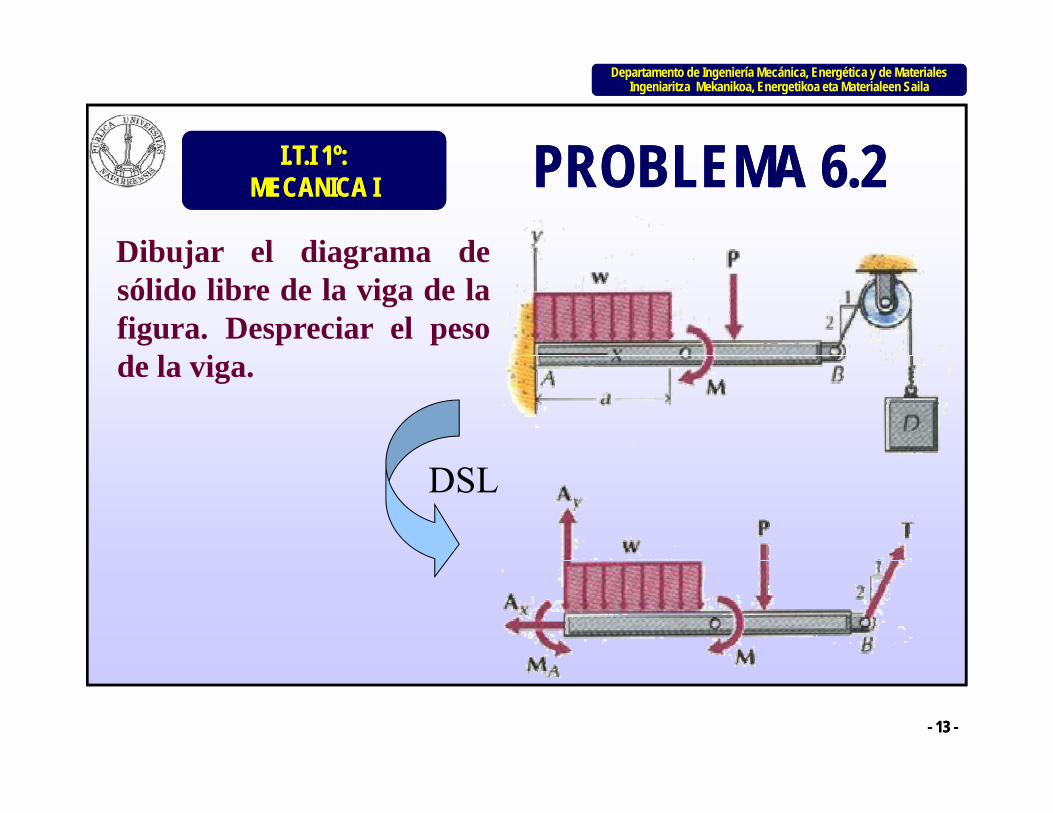
Dibujar el diagrama deDibujar el diagrama desólido libre de la viga de lafigura. Despreciar el peso
ide la viga.
DSL
-- 1313 --

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 6 3PROBLEMA 6 3I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I PROBLEMA 6.3PROBLEMA 6.3
Un cilindro se apoya sobre una superficie lisa formadapor un plano inclinado y una armadura de dos barras.Dibujar el diagrama de sólido libre para el cilindro,para la armadura de dos barras y para el pasador en C.
DSL´s
-- 1414 --
I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 6 4PROBLEMA 6 4I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
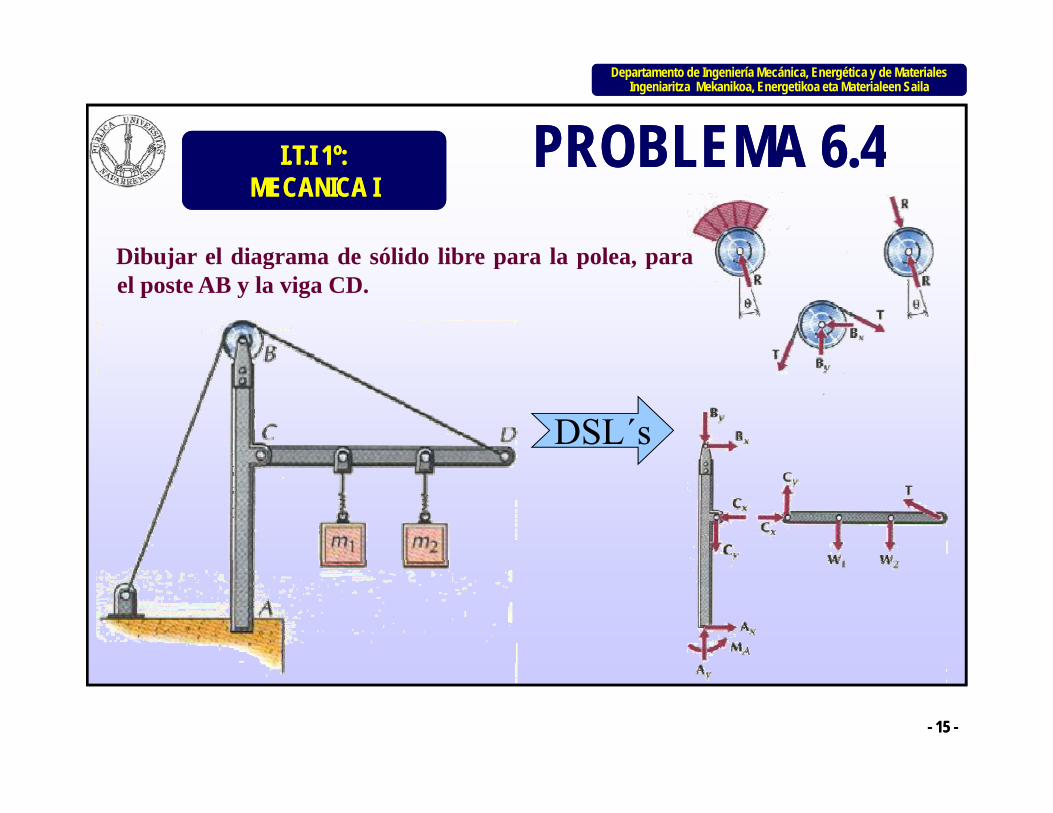
PROBLEMA 6.4PROBLEMA 6.4Dib jar el diagrama de sólido libre para la polea paraDibujar el diagrama de sólido libre para la polea, parael poste AB y la viga CD.
DSL´s
-- 1515 --

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 6 6PROBLEMA 6 6I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
PROBLEMA 6.6PROBLEMA 6.6(Pag. 222)(Pag. 222)
Dib jar el diagrama de sólido libre para el cilindro la barra AB Incl e el pesoDibujar el diagrama de sólido libre para el cilindro y la barra AB. Incluye el pesode los dos cuerpos y supón lisas todas las superficies.
-- 1616 --

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 6 7PROBLEMA 6 7I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
PROBLEMA 6.7PROBLEMA 6.7(Pag. 223)(Pag. 223)
Dibujar el diagrama de sólido libre para la viga AD. Incluye el peso de la viga.
-- 1717 --

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 6 14PROBLEMA 6 14I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
PROBLEMA 6.14PROBLEMA 6.14(Pag. 224)(Pag. 224)
Dib jar el diagrama de sólido libre para la barra AB para la barra BDDibujar el diagrama de sólido libre para la barra AB y para la barra BD.Desprecia el peso de las barras.
-- 1818 --

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
6 2 2 Idealización de apoyos yI.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
6.2.2 Idealización de apoyos y conexiones tridimensionales
A continuación se indican los tipos habituales de apoyos y conexionesA continuación se indican los tipos habituales de apoyos y conexionesutilizados en cuerpos rígidos sometidos a sistemas tridimensionales defuerzas, junto con las F y M que se utilizan para representar sus accionessobre el cuerpo rígido en el DSLsobre el cuerpo rígido en el DSL.
A) RótulaPuede transmitir una fuerza R pero no momentos. Esta fuerza suele representarsep pmediante sus tres componentes rectangulares.
-- 1919 --

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
B) Gozne (Bisagra)N l t d ti d t iti f RNormalmente destinado a transmitir una fuerza R en unadirección perpendicular al eje del pasador del gozne.Su diseño puede también permitir transmitir una componente de la fuerza a lo largo deleje del pasador.j pCiertos goznes pueden transmitir pequeños momentos respecto a ejes perpendicularesa ejes del pasador.Las parejas de goznes alineadas adecuadamente sólo transmiten fuerzas en lascondiciones de utilización normales
C) Cojinete de bolasEl cojinete de bolas ideal (liso) tiene por misión transmitir
condiciones de utilización normales.
una fuerza R en una dirección perpendicular al eje delcojinete.Si el cojinete tiene la dirección del eje y, la acción delcojinete se representa en el DSL por las componente R y R
-- 2020 --
cojinete se representa en el DSL por las componente Rx y Rz.

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
D) Cojinete de fricción (Chumacera)H d t iti f R di ióHan de transmitir una fuerza R en una direcciónperpendicular a su eje.Ciertas chumaceras pueden transmitir pequeños momentosrespecto a ejes perpendiculares al eje del árbol.
) C ji j
p j p p jLas parejas de chumaceras alineadas adecuadamente sólotransmiten fuerzas perpendiculares al eje del árbol.
E) Cojinete de empujeHa de transmitir componentes de fuerza tantoperpendiculares como paralelas al eje del cojinete.Ciertos cojinetes de empuje pueden transmitir pequeñosC e os coj e es de e puje puede s peque osmomentos respecto a ejes perpendiculares al eje del árbol.Las parejas de cojinetes alineados adecuadamente sólotransmiten fuerzas en condiciones normales def i i t
-- 2121 --
funcionamiento.
I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
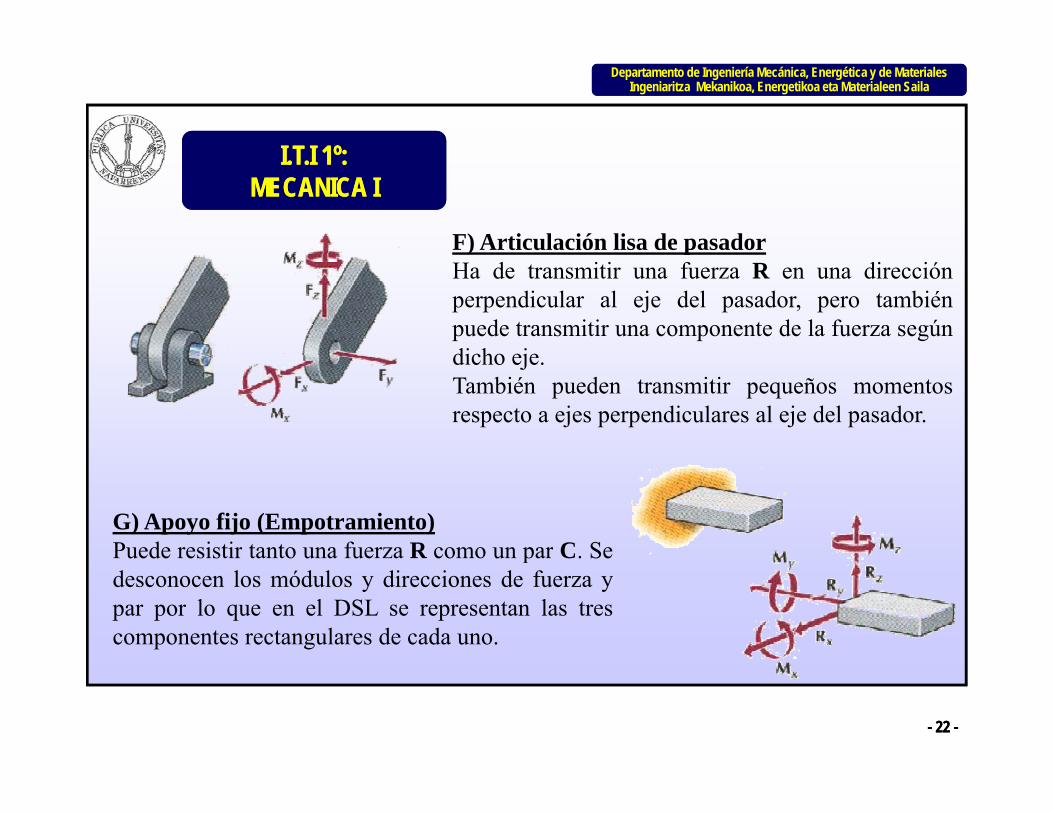
F) Articulación lisa de pasador) pHa de transmitir una fuerza R en una direcciónperpendicular al eje del pasador, pero tambiénpuede transmitir una componente de la fuerza segúndicho ejedicho eje.También pueden transmitir pequeños momentosrespecto a ejes perpendiculares al eje del pasador.
G) Apoyo fijo (Empotramiento)Puede resistir tanto una fuerza R como un par C. Sepdesconocen los módulos y direcciones de fuerza ypar por lo que en el DSL se representan las trescomponentes rectangulares de cada uno.
-- 2222 --

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 6 5PROBLEMA 6 5I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I PROBLEMA 6.5PROBLEMA 6.5
Dibujar el diagrama de sólido libre de la barra curva soportada por una rótulaj g p pen A, un cable flexible en B y una articulación de pasador en C. Despréciese elpeso de la barra.
DSL
-- 2323 --

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 6 21PROBLEMA 6 21I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
PROBLEMA 6.21PROBLEMA 6.21(Pag. 225)(Pag. 225)
Dib jar el diagrama de sólido libre del bloq e representado en la fig ra ElDibujar el diagrama de sólido libre del bloque representado en la figura. Elapoyo en A es una rótula y el soporte en B es una articulación de pasador.
-- 2424 --
I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 6 24PROBLEMA 6 24I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
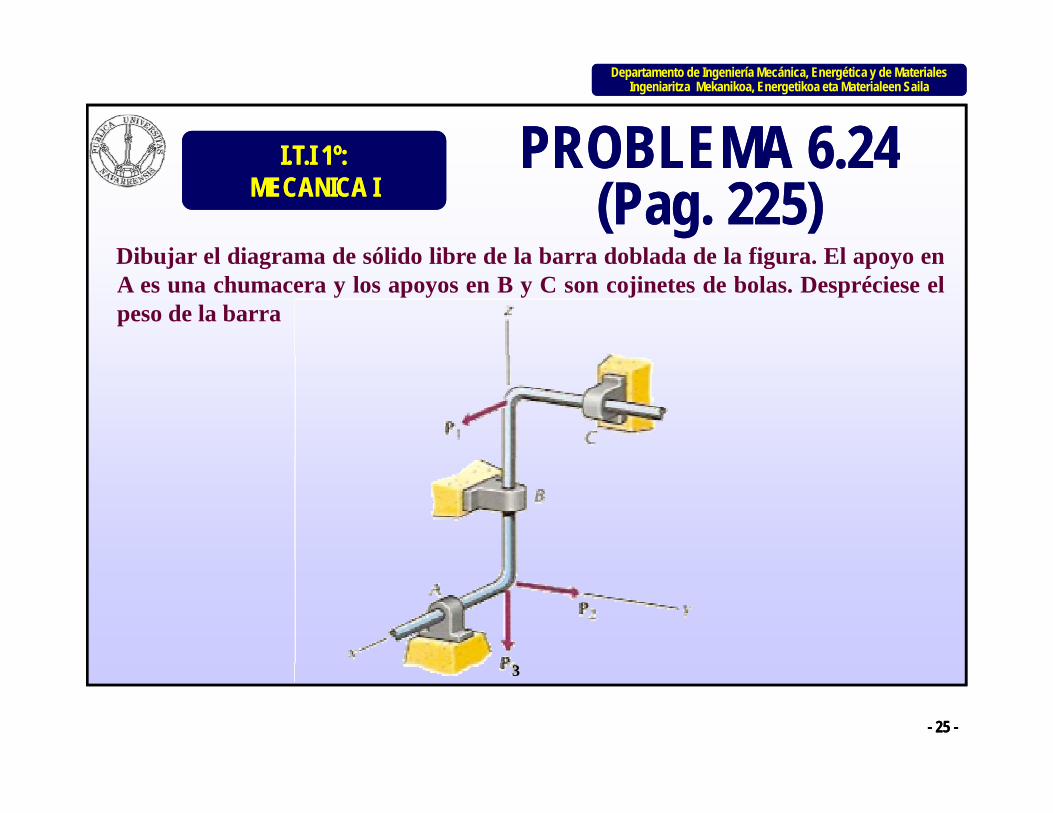
PROBLEMA 6.24PROBLEMA 6.24(Pag. 225)(Pag. 225)
Dibujar el diagrama de sólido libre de la barra doblada de la figura El apoyo enDibujar el diagrama de sólido libre de la barra doblada de la figura. El apoyo enA es una chumacera y los apoyos en B y C son cojinetes de bolas. Despréciese elpeso de la barra
-- 2525 --
3
I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I 6.3 Equilibrio en dos dimensiones
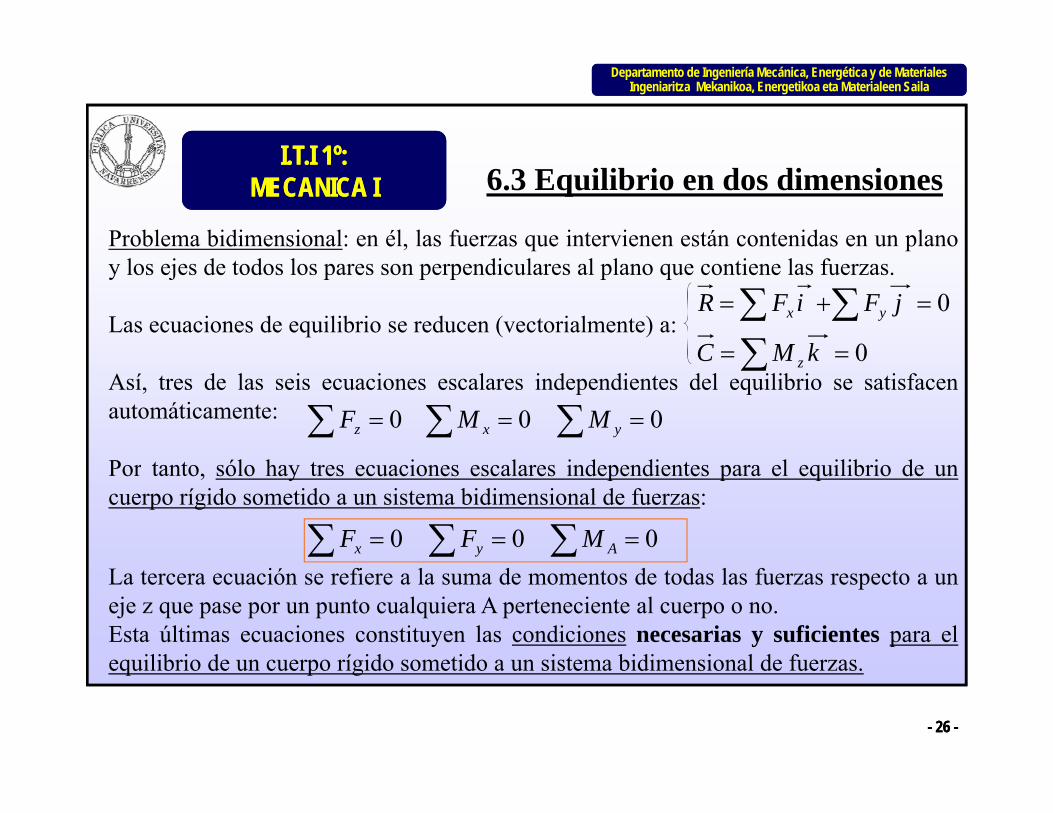
Problema bidimensional: en él, las fuerzas que intervienen están contenidas en un planoy los ejes de todos los pares son perpendiculares al plano que contiene las fuerzas.
Las ecuaciones de equilibrio se reducen (vectorialmente) a:
0
0
kMC
jFiFR yx
Así, tres de las seis ecuaciones escalares independientes del equilibrio se satisfacenautomáticamente:
0kMC z
000 yxz MMF
Por tanto, sólo hay tres ecuaciones escalares independientes para el equilibrio de uncuerpo rígido sometido a un sistema bidimensional de fuerzas:
000 Ayx MFFLa tercera ecuación se refiere a la suma de momentos de todas las fuerzas respecto a uneje z que pase por un punto cualquiera A perteneciente al cuerpo o no.Esta últimas ecuaciones constituyen las condiciones necesarias y suficientes para elequilibrio de un cuerpo rígido sometido a un sistema bidimensional de fuerzas
-- 2626 --
equilibrio de un cuerpo rígido sometido a un sistema bidimensional de fuerzas.

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Hay otras dos maneras de expresar lasI.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
E l i fi i l lt t R l lt t
Hay otras dos maneras de expresar lasecuaciones de equilibrio de un cuerpo sometidoa un sistema bidimensional de fuerzas.
1ª En la primera figura se aprecian la resultante R y el par resultanteC de un sistema bidimensional cualquiera de fuerzas que seejercen sobre un cuerpo rígido.
La resultante puede expresarse mediante sus componentes
1ª
La resultante puede expresarse mediante sus componentesrectangulares (figura 2).
Si se cumple la condición: 00 CAM
Si además se cumple que:
Para todo punto B del cuerpo o exterior a él, que no se halle en eleje y, la ecuación sólo puede satisfacerse si
jFF yx R0
0BM 0yF
Así pues, otro sistema de ecuaciones escalares para el equilibrioen problemas bidimensionales es:
d d l t A B h d t d d dif t 000 BAx MMF
-- 2727 --
en donde los puntos A y B han de tener coordenadas x diferentes.
I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
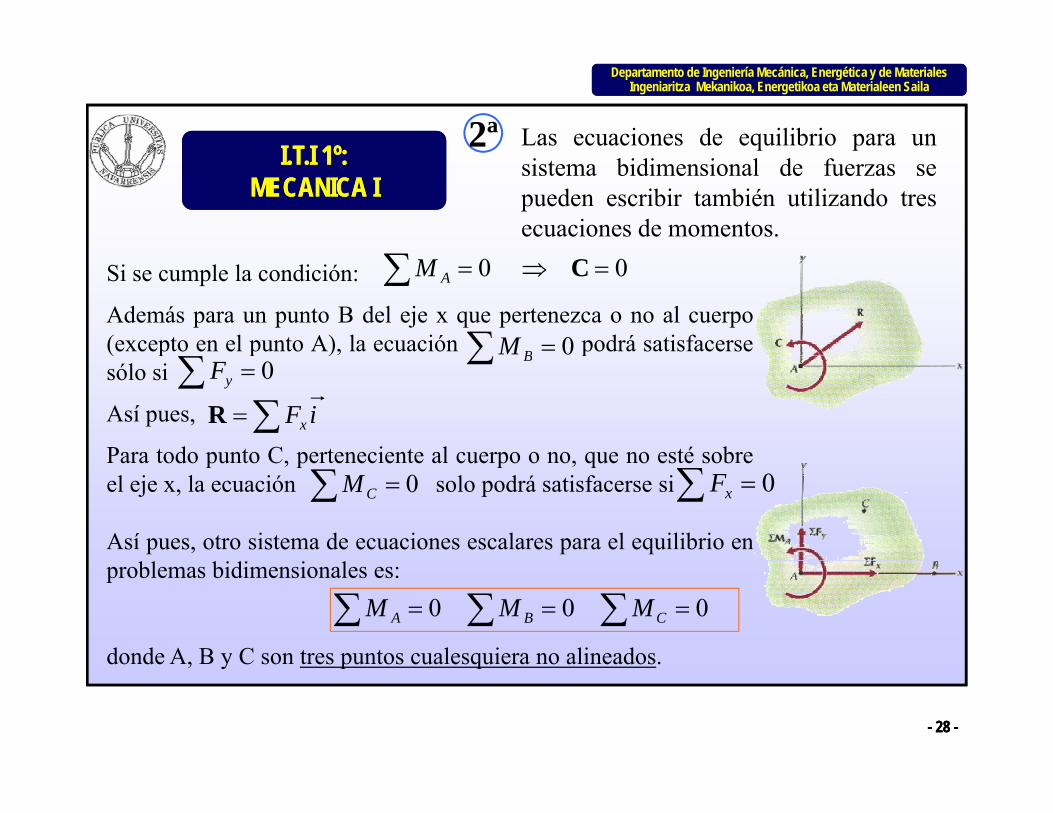
2ª Las ecuaciones de equilibrio para unI.T.I 1º:I.T.I 1º:
MECANICA IMECANICA II.T.I 1º:I.T.I 1º:
MECANICA IMECANICA I
q psistema bidimensional de fuerzas sepueden escribir también utilizando tresecuaciones de momentos.
Si se cumple la condición:
Además para un punto B del eje x que pertenezca o no al cuerpo(excepto en el punto A), la ecuación podrá satisfacerse
00 CAM
0BM( p p ) psólo si
Así pues,
Para todo punto C perteneciente al cuerpo o no que no esté sobre iFxR
B 0yF
Para todo punto C, perteneciente al cuerpo o no, que no esté sobreel eje x, la ecuación solo podrá satisfacerse si
Así pues, otro sistema de ecuaciones escalares para el equilibrio en
0CM 0xF
problemas bidimensionales es:
donde A, B y C son tres puntos cualesquiera no alineados.
000 CBA MMM
-- 2828 --
donde A, B y C son tres puntos cualesquiera no alineados.

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I 6.3.1 Cuerpos (miembros) de 2 fuerzas
El equilibrio de un cuerpo sometido a dos fuerzas se presentacon bastante frecuencia por lo que se le presta especial atención.
Ejemplo: barra de conexión de peso despreciable (figura).
Las fuerzas que sobre la barra ejercen los pasadores lisosLas fuerzas que sobre la barra ejercen los pasadores lisossituados en A y B se pueden descomponer en componentessegún el eje de la barra y perpendicular a él. Aplicadoecuaciones de equilibrio: xxxxx BABAF 00
Las fuerzas Ay y By forman un par que debe ser nulo si la barraestá en equilibrio, por tanto:
yyyyy BABAF 00
0 BAq , pAsí pues, en los miembros de dos fuerzas, el equilibrio exigeque las fuerzas sean de igual módulo y recta soporte, peroopuestas. La forma del miembro no influye en este sencillorequisito Los pesos de los miembros deben ser despreciables
0yy BA
-- 2929 --
requisito. Los pesos de los miembros deben ser despreciables.

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I 6.3.2 Cuerpos (miembros) de 3 fuerzas
El equilibrio de un cuerpo bajo la acción de tres fuerzas constituye también unasituación especial.
Ejemplo:
DSL de AB
Si un cuerpo está en equilibrio bajo la acción de tres fuerzas las rectas soportes deéstas deben ser concurrentes (pasar por un punto común).Si no fuera así la fuerza no concurrente ejercería un momento respecto al punto deSi no fuera así, la fuerza no concurrente ejercería un momento respecto al punto deconcurso de las otras dos fuerzas.Caso particular: Un cuerpo sometido a tres fuerzas paralelas. El punto de concurso esel infinito.
-- 3030 --

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
6 3 3 R i hi tátiI.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
6.3.3 Reacciones hiperestáticas y ligaduras parciales
Tenemos un cuerpo sometido a un sistema de fuerzas coplanarias. Este puede sustituirsepor uno equivalente formado por una fuerza que pase por un punto arbitrario A y un par.
Para que el cuerpo esté en equilibrio, los apoyos deben poder ejercersobre el cuerpo un sistema fuerza-par igual y opuesto (ligaduras).Ejemplo: Consideremos los apoyos de la figura (a)El pasador en A puede ejercer fuerzas en x y en y que eviten la traslacióndel cuerpo pero no puede ejercer un momento que impida la rotaciónentorno a A La barra B origina una fuerza en y generando así unentorno a A. La barra B origina una fuerza en y generando así unmomento respecto a A que impida la rotación del cuerpo.Cuando las ecuaciones de equilibrio sean suficientes para determinar lasfuerzas incógnitas en los apoyos el cuerpo está determinado
á i li d d d (i á i )
-- 3131 --
estáticamente con ligaduras adecuadas (isostáticas).
I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
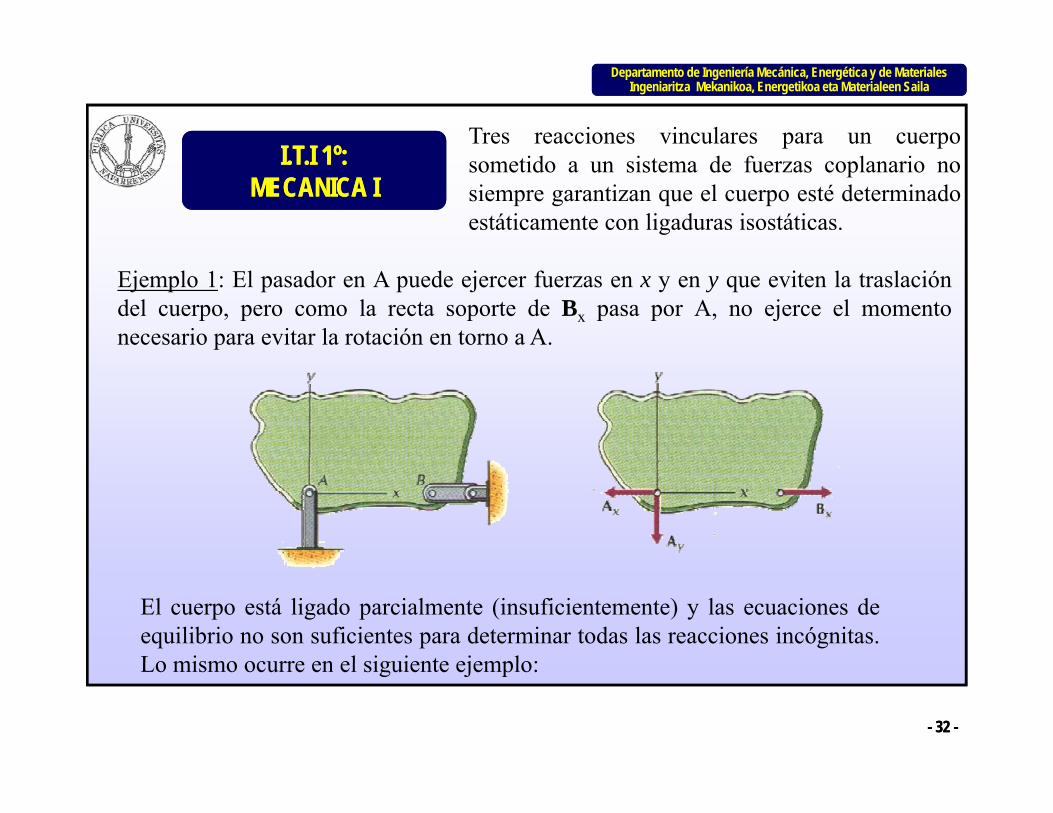
Tres reacciones vinculares para un cuerpoI.T.I 1º:I.T.I 1º:
MECANICA IMECANICA II.T.I 1º:I.T.I 1º:
MECANICA IMECANICA Isometido a un sistema de fuerzas coplanario nosiempre garantizan que el cuerpo esté determinadoestáticamente con ligaduras isostáticas.
Ejemplo 1: El pasador en A puede ejercer fuerzas en x y en y que eviten la traslacióndel cuerpo, pero como la recta soporte de Bx pasa por A, no ejerce el momentonecesario para evitar la rotación en torno a A.
El cuerpo está ligado parcialmente (insuficientemente) y las ecuaciones deequilibrio no son suficientes para determinar todas las reacciones incógnitas.Lo mismo ocurre en el siguiente ejemplo:
-- 3232 --
Lo mismo ocurre en el siguiente ejemplo:

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Ejemplo 2: Sus tres conexiones pueden evitar la rotación en torno a un puntoEjemplo 2: Sus tres conexiones pueden evitar la rotación en torno a un puntocualquiera y la traslación del cuerpo en la dirección y pero no la traslación del cuerpoen la dirección x.
Un cuerpo con un número adecuado de reacciones está insuficientemente ligadocuando las ligaduras estén dispuestas de tal manera que las fuerzas en los apoyossean concurrentes o paralelas.
-- 3333 --

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Los cuerpos ligados parcialmente pueden estarI.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Los cuerpos ligados parcialmente pueden estaren equilibrio bajo la acción de sistemas defuerzas específicos.
0FEjemplo: Las reacciones RA y RB de la viga se pueden determinar usando
Sin embargo, la viga está insuficientemente ligada ya que se movería en la dirección xsi cualquiera de las cargas aplicadas tuviera una pequeña componente según x
0
0
A
y
M
F
si cualquiera de las cargas aplicadas tuviera una pequeña componente según x.
-- 3434 --

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Si en vez de una conexión rígida en BI.T.I 1º:I.T.I 1º:
MECANICA IMECANICA II.T.I 1º:I.T.I 1º:
MECANICA IMECANICA I
Así, las 3 ecuaciones independientes de equilibrio no proporcionan suficiente
colocamos un pasador, se obtiene una reacciónadicional Bx que no es necesaria para evitar elmovimiento del cuerpo.
Así, las 3 ecuaciones independientes de equilibrio no proporcionan suficienteinformación para determinar las 4 incógnitas.
DSLDSL DSLDSL
Los cuerpos ligados con apoyos de más están indeterminados estáticamente ya queserán necesarias relaciones referentes a propiedades físicas del cuerpo (sistemashiperestáticos). Los apoyos que no son necesarios para mantener el equilibrio delcuerpo se llaman superabundantes. Ejemplos:cuerpo se llaman superabundantes. Ejemplos:
-- 3535 --

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I 6.3.4 Resolución de problemas
La aplicación a problemas de equilibrio del procedimiento visto en el
Pasos para analizar y resolver problemas de equilibrio:
La aplicación a problemas de equilibrio del procedimiento visto en elcapítulo primero para resolver problemas de tipo técnico, conduce a losiguiente:
Pasos para analizar y resolver problemas de equilibrio:1. Leer atentamente el enunciado.2. Identificar el resultado que se pide.3. Preparar un esquema a escala y tabular la información de que se dispone.4. Identificar las ecuaciones de equilibrio a utilizar para obtener el resultado.5. Dibujar el diagrama de sólido libre adecuado.6. Aplicar las ecuaciones adecuadas de fuerzas y momentos.7. Registrar la respuesta con el número adecuado de cifras significativas y las7. Registrar la respuesta con el número adecuado de cifras significativas y las
unidades apropiadas.8. Estudiar la respuesta y determinar si es razonable. Como comprobación, escribir
otras ecuaciones de equilibrio y ver si las satisface la solución.
-- 3636 --
I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
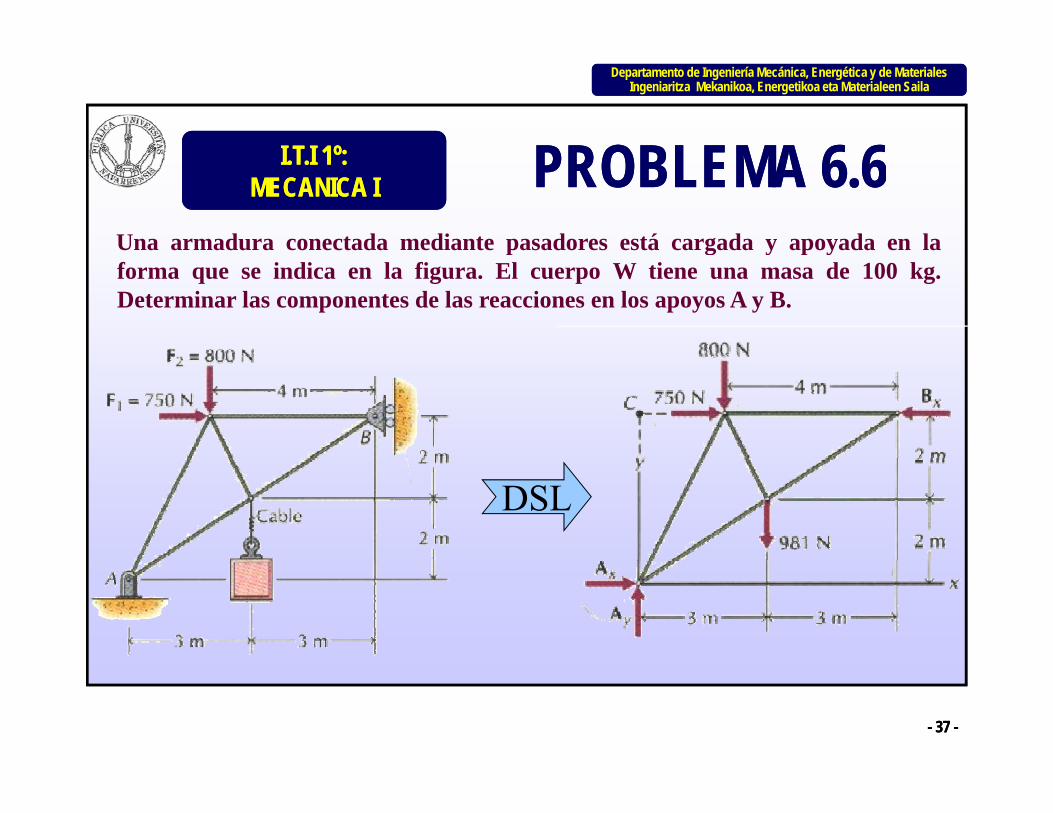
PROBLEMA 6 6PROBLEMA 6 6I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I PROBLEMA 6.6PROBLEMA 6.6
Una armadura conectada mediante pasadores está cargada y apoyada en lap g y p yforma que se indica en la figura. El cuerpo W tiene una masa de 100 kg.Determinar las componentes de las reacciones en los apoyos A y B.
DSL
-- 3737 --
I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
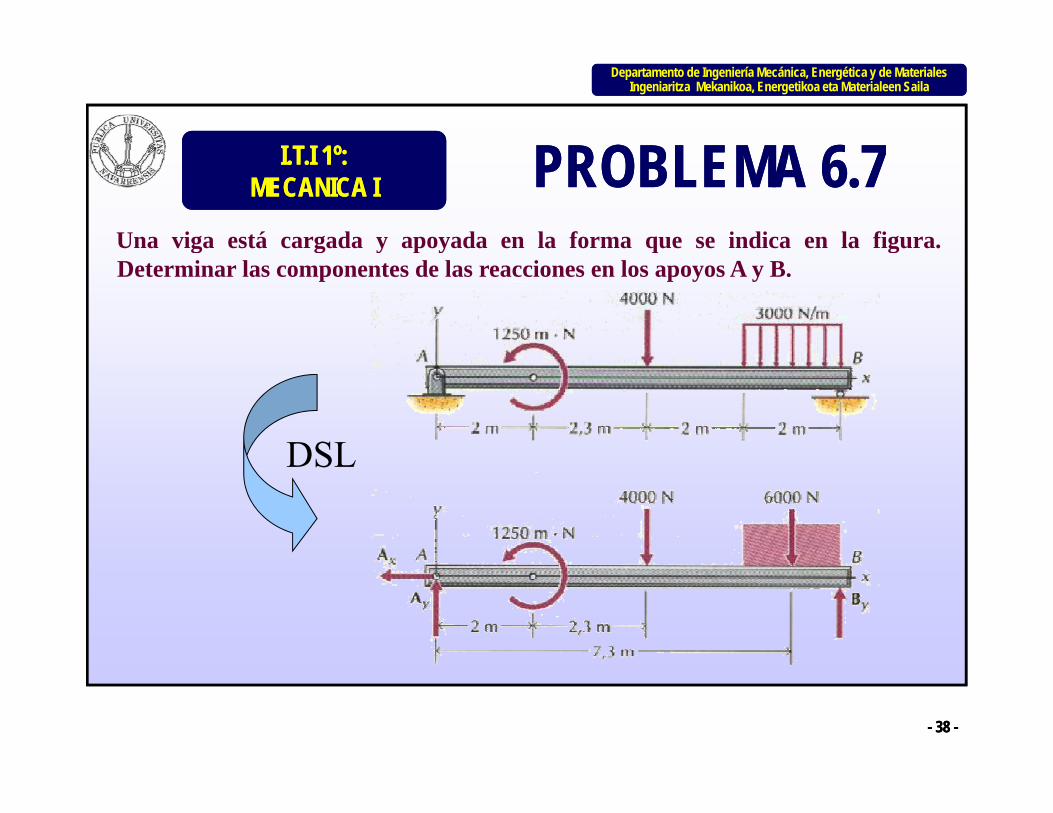
PROBLEMA 6 7PROBLEMA 6 7I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I PROBLEMA 6.7PROBLEMA 6.7
Una viga está cargada y apoyada en la forma que se indica en la figura.g g y p y q gDeterminar las componentes de las reacciones en los apoyos A y B.
DSLDSL
-- 3838 --
I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 6 8PROBLEMA 6 8I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
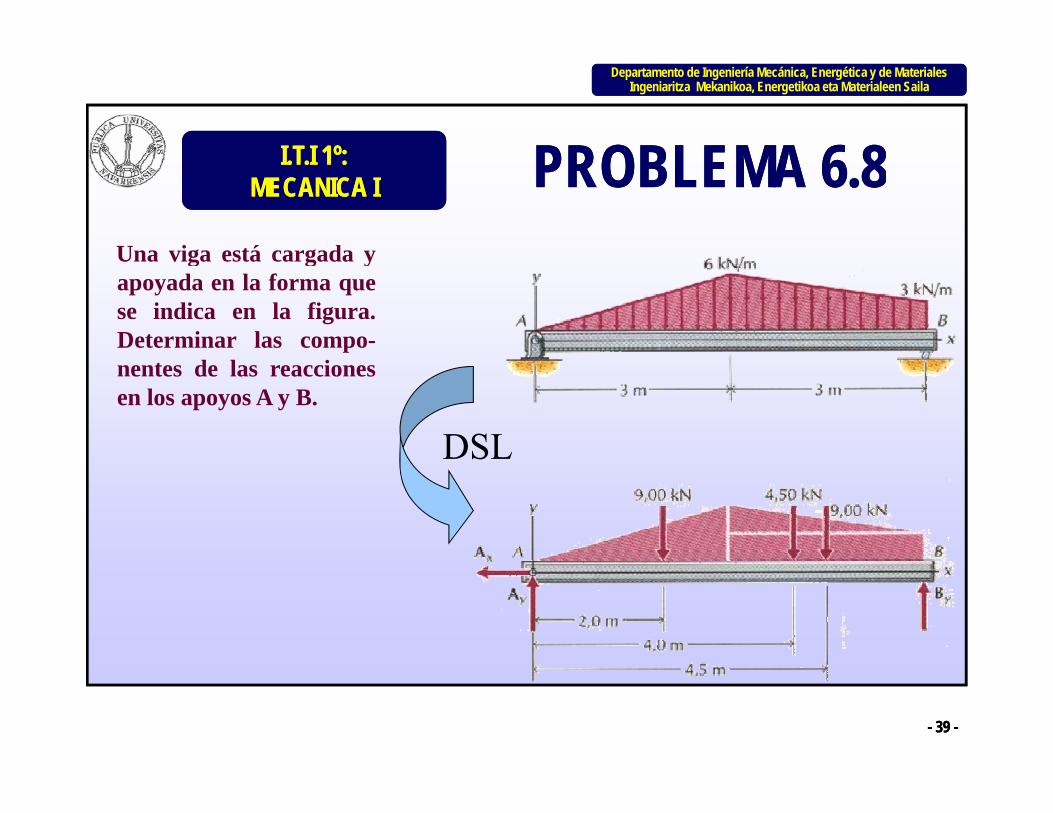
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I PROBLEMA 6.8PROBLEMA 6.8
Una viga está cargada yUna viga está cargada yapoyada en la forma quese indica en la figura.Determinar las compo-
DSL
nentes de las reaccionesen los apoyos A y B.
DSL
-- 3939 --
I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 6 9PROBLEMA 6 9I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
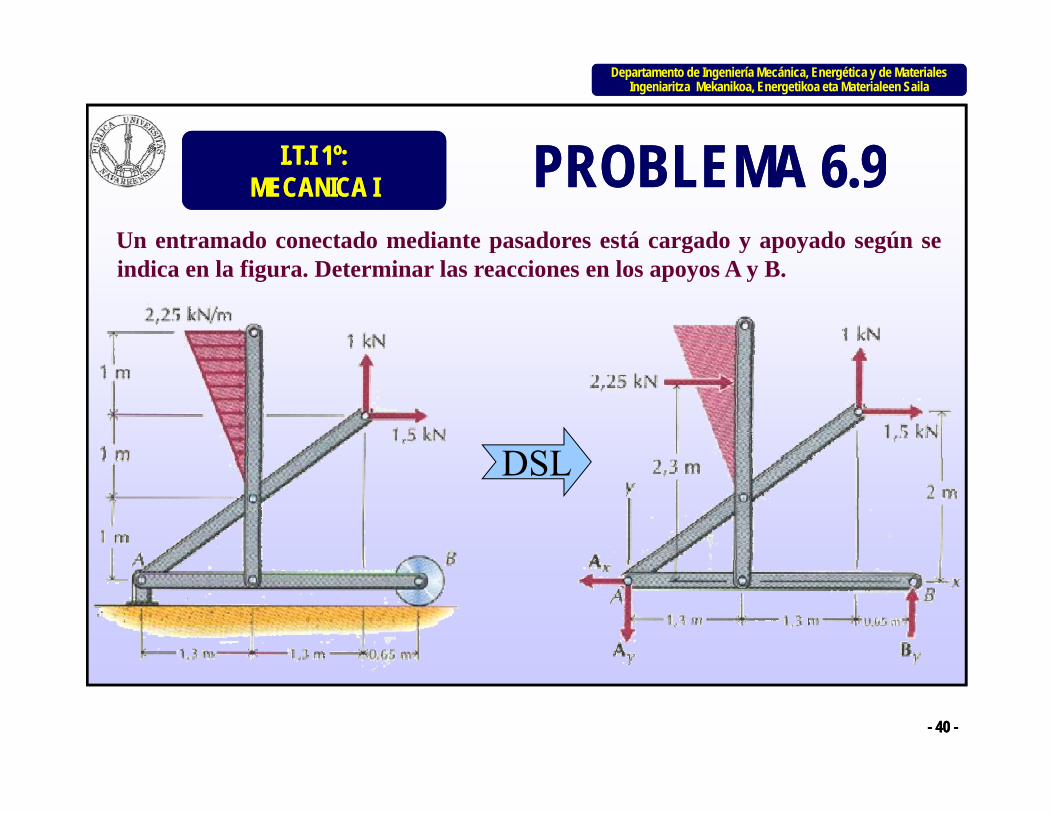
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I PROBLEMA 6.9PROBLEMA 6.9
Un entramado conectado mediante pasadores está cargado y apoyado según sep g y p y gindica en la figura. Determinar las reacciones en los apoyos A y B.
DSLDSL
-- 4040 --
I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 6 10PROBLEMA 6 10I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
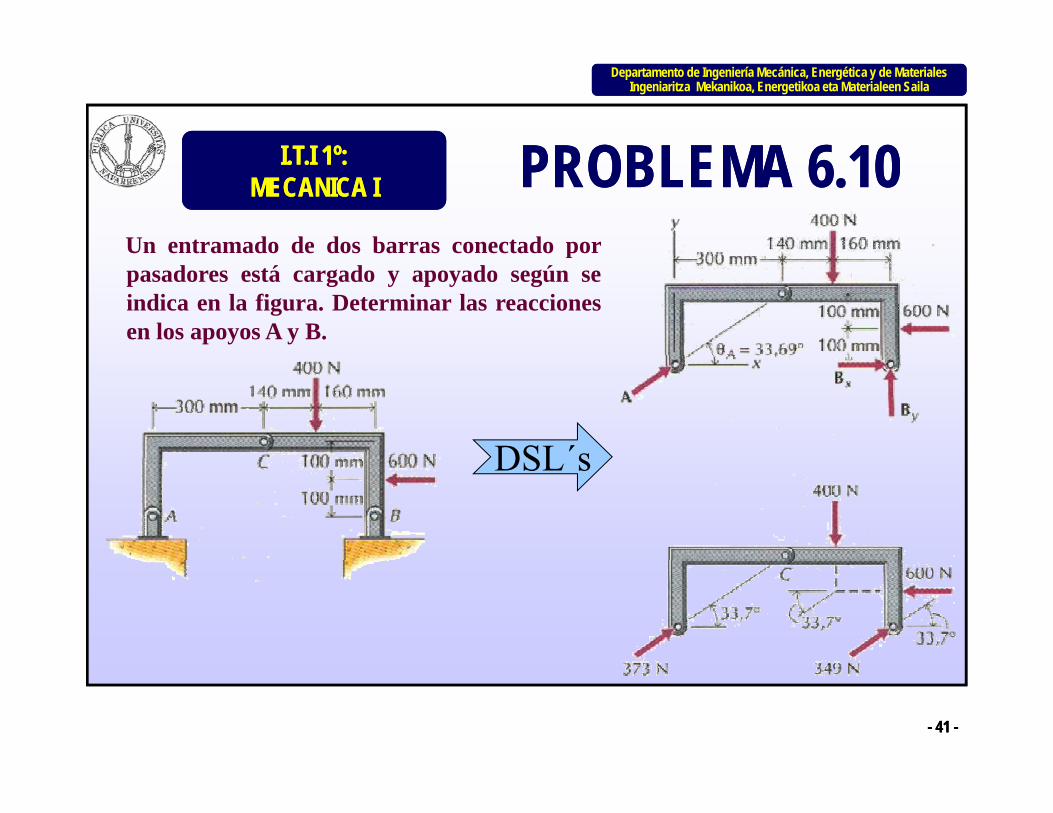
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I PROBLEMA 6.10PROBLEMA 6.10
Un entramado de dos barras conectado porUn entramado de dos barras conectado porpasadores está cargado y apoyado según seindica en la figura. Determinar las reaccionesen los apoyos A y B.
DSL´sDSL s
-- 4141 --
I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 6 11PROBLEMA 6 11I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I PROBLEMA 6.11PROBLEMA 6.11
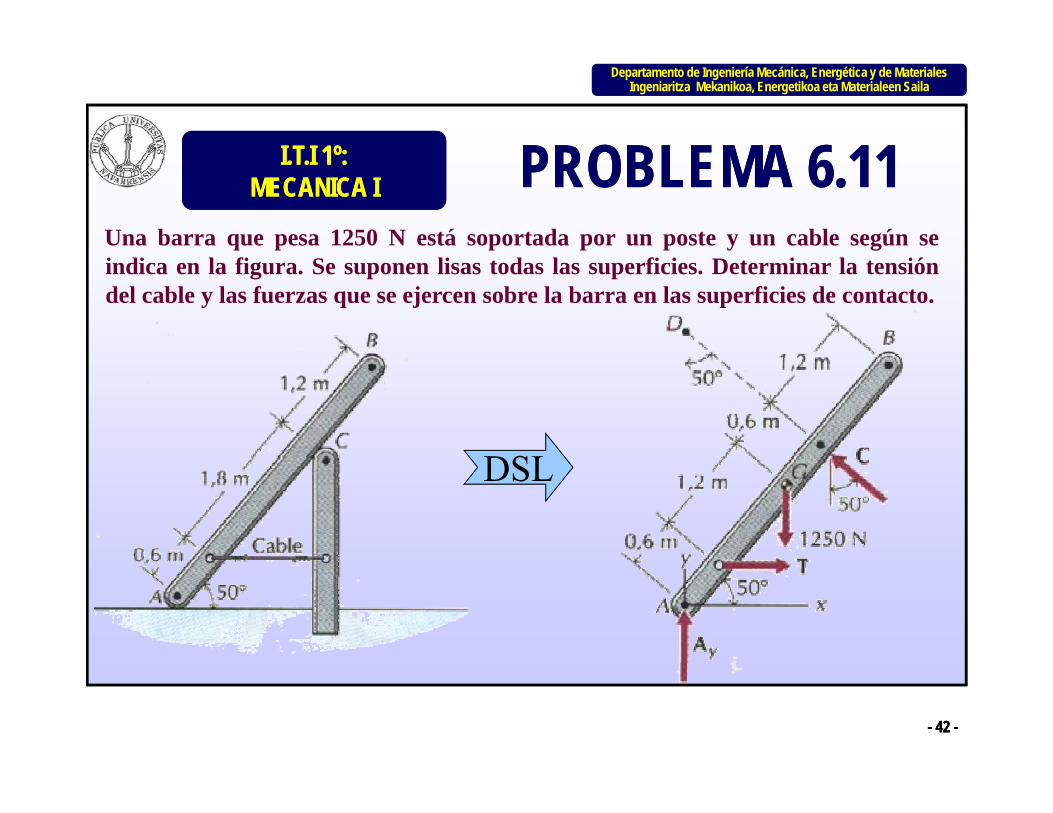
Una barra que pesa 1250 N está soportada por un poste y un cable según seindica en la figura. Se suponen lisas todas las superficies. Determinar la tensióndel cable y las fuerzas que se ejercen sobre la barra en las superficies de contacto.
DSLDSL
-- 4242 --

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 6 12PROBLEMA 6 12I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
PROBLEMA 6.12PROBLEMA 6.12
Un cilindro de masa 50 kg se apoya sobreun plano inclinado y un entramadode dos barras articulado por pasador.de dos barras articulado por pasador.Suponiendo lisas todas las superficies,determinar:
) L f b l ili da) Las fuerzas que sobre el cilindroejercen las superficies de contacto.
b) Las reacciones en los apoyos A y C) p y ydel entramado de dos barras.
-- 4343 --

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 6.12 bisPROBLEMA 6.12 bisI.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
PROBLEMA 6.12 bisPROBLEMA 6.12 bis
DSL´s
-- 4444 --

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 6 51PROBLEMA 6 51I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
PROBLEMA 6.51PROBLEMA 6.51(Pag. 244)(Pag. 244)
Tres tuberías se encuentran sobre un bastidor según se indica en lafigura. Cada tubería pesa 500 N. Determinar las reacciones en los apoyosA y B.
-- 4545 --

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
6.4 Equilibrio en tres dimensionesI.T.I 1º:I.T.I 1º:
MECANICA IMECANICA II.T.I 1º:I.T.I 1º:
MECANICA IMECANICA I RECUERDA:Resultante de un sistema de fuerzas cualesquiera
La resultante de un sistema tridimensional de fuerzas cualesquiera (figura 1) seq ( g )puede determinar descomponiendo cada fuerza del sistema en una fuerza igual yparalela que pase por un punto dado (O origen de coordenadas) y un par. (figura 2)
El sistema dado se sustituye por dos sistemas (figura 3) :• Un sistema de fuerzas no coplanarias concurrentes en O con módulo,dirección y sentido igual a los de las fuerzas del sistema original.• Un sistema de pares no coplanarios.
-- 4646 --
I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
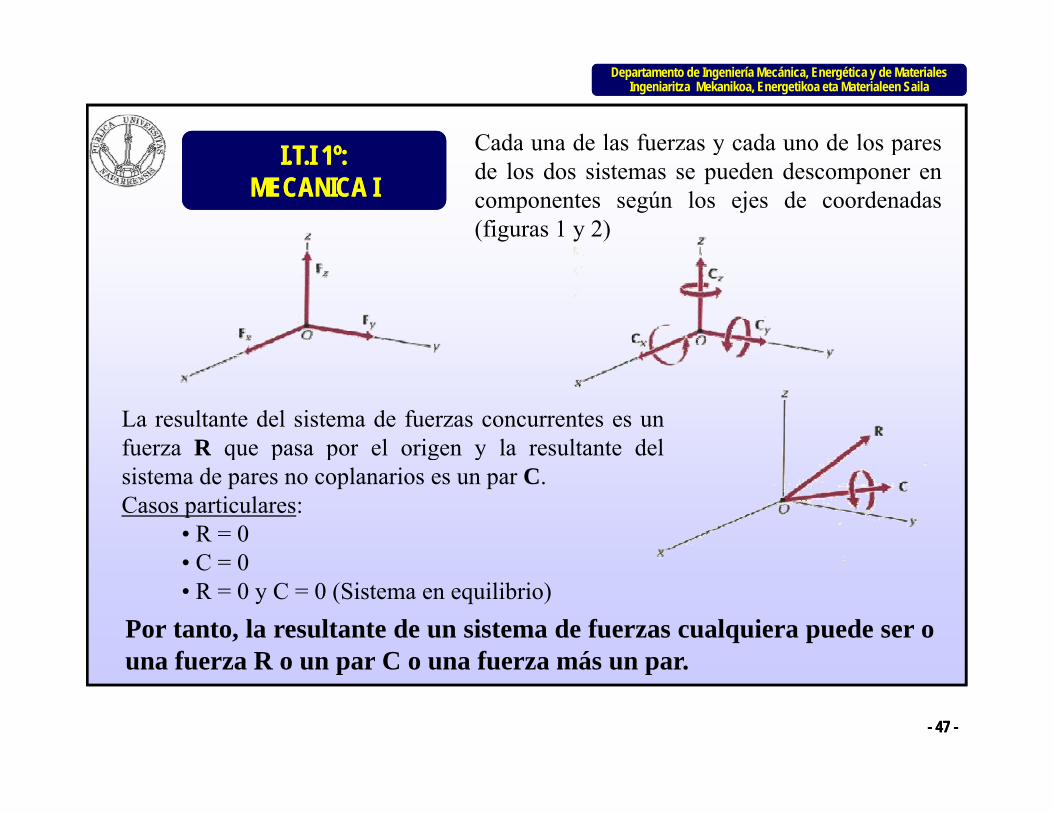
Cada una de las fuerzas y cada uno de los paresI.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
Cada u a de as ue as y cada u o de os pa esde los dos sistemas se pueden descomponer encomponentes según los ejes de coordenadas(figuras 1 y 2)
La resultante del sistema de fuerzas concurrentes es unfuerza R que pasa por el origen y la resultante delq p p g ysistema de pares no coplanarios es un par C.Casos particulares:
• R = 0• C = 0• C = 0• R = 0 y C = 0 (Sistema en equilibrio)
Por tanto, la resultante de un sistema de fuerzas cualquiera puede ser ouna fuerza R o un par C o una fuerza más un par
-- 4747 --
una fuerza R o un par C o una fuerza más un par.
I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
6 4 E ilib i t di iI.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
6.4 Equilibrio en tres dimensiones(Continuación)
Por tanto y como ya se ha dicho, un sistema genérico, tridimensional, de n fuerzas y ny y , g , , ypares puede sustituirse por un sistema equivalente constituido por fuerzas concurrentesno coplanarias y un sistema de pares no coplanarios cuyas resultantes se puedenexpresar así: kFjFiFR zyx
kMjMiMC zyx
La fuerza resultante R, junto con el par resultante C, constituyen la resultante delsistema genérico tridimensional de fuerzas.Así pues, un cuerpo rígido sometido a un sistema genérico tridimensional de fuerzasestará en equilibrio si R = C = 0, lo que exige que
000 zyx FFF6 ec escalares de equil indep
000 zyx MMM6 ec. escalares de equil. indep.
Estas son las condiciones necesarias y suficientes para el equilibrio del cuerpo.
-- 4848 --
y p q p

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 6 13PROBLEMA 6 13I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I PROBLEMA 6.13PROBLEMA 6.13
Una placa que pesa 2,5 kN está soportada por un árbol AB y un cable C. En Aji ji j ji áhay un cojinete de bolas y en B un cojinete de empuje. Los cojinetes están
alineados adecuadamente de forma que solo trasmiten fuerzas. Determinar lasreacciones en los cojinetes A y B y la tensión en el cable C cuando se apliquen a laplaca las tres fuerzas indicadas.p
DSL-- 4949 --
DSL

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 6 14PROBLEMA 6 14I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
PROBLEMA 6.14PROBLEMA 6.14Un poste y un soporte sostienen unapolea. Un cable que pasa sobre la poleatransmite una carga de 2500 N en laforma indicada. Determinar la reacciónen el apoyo A del poste.
DSL
en el apoyo A del poste.
DSL
-- 5050 --
I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 6 15PROBLEMA 6 15I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I PROBLEMA 6.15PROBLEMA 6.15
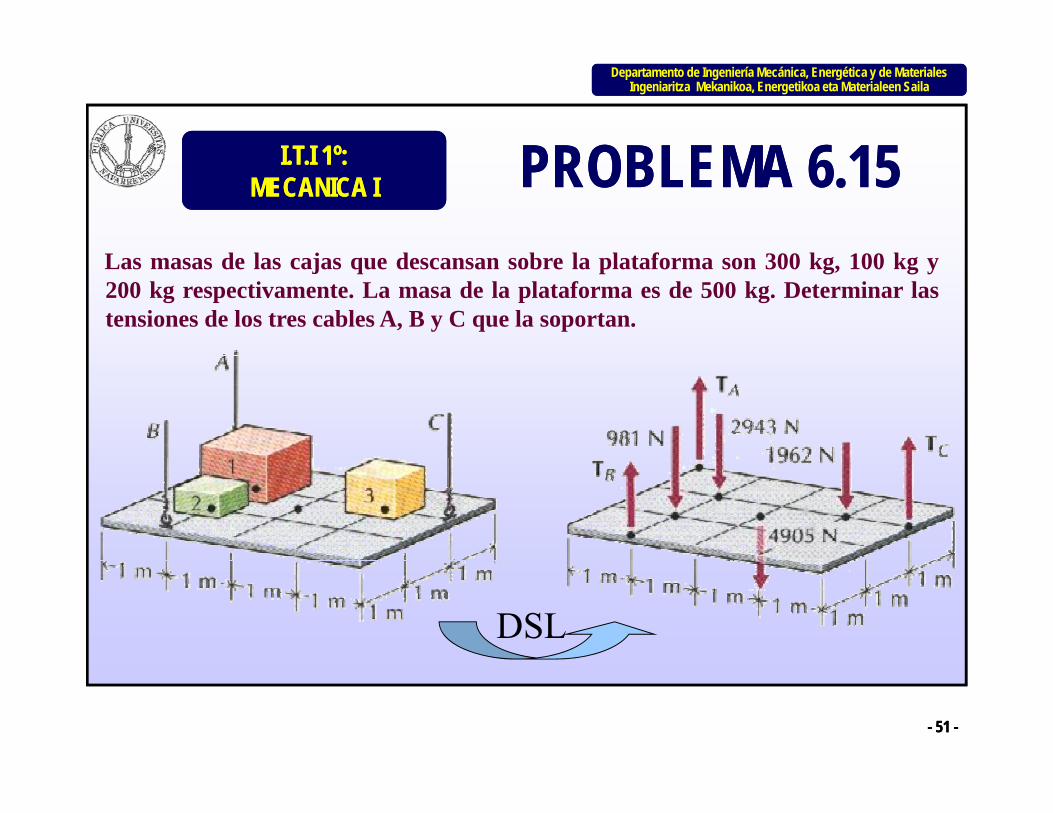
j fLas masas de las cajas que descansan sobre la plataforma son 300 kg, 100 kg y200 kg respectivamente. La masa de la plataforma es de 500 kg. Determinar lastensiones de los tres cables A, B y C que la soportan.
DSL
-- 5151 --

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 6 16PROBLEMA 6 16I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I PROBLEMA 6.16PROBLEMA 6.16
El tablero de la figura tiene una masa de 25 kg y lo mantienen en posiciónhorizontal dos goznes y una barra. Los goznes están alineados adecuadamente deforma que solo ejercen reacciones de fuerza sobre el tablero. Supóngase que elgozne en B resiste toda fuerza dirigida según el eje de los pasadores de los goznes.Determinar las reacciones en los apoyos A, B y D.Determinar las reacciones en los apoyos A, B y D.
DSL
-- 5252 --

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
PROBLEMAS RecomendadosPROBLEMAS Recomendados::Los ejercicios de las Paginas 257Los ejercicios de las Paginas 257--258258
D l 6D l 6 72 l 672 l 6 8181Del 6Del 6--72 al 672 al 6--8181
-- 5353 --

I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 6 73PROBLEMA 6 73I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
PROBLEMA 6.73PROBLEMA 6.73(Pag. 257)(Pag. 257)
El rodillo de la figura pesa 1250 N. Determinar la fuerza p que hay queaplicarle para que supere el escalón que se indica.
-- 5454 --
I T I 1ºI T I 1ºI T I 1ºI T I 1º
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
Departamento de Ingeniería Mecánica, Energética y de MaterialesIngeniaritza Mekanikoa, Energetikoa eta Materialeen Saila
PROBLEMA 6 74PROBLEMA 6 74I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
I.T.I 1º:I.T.I 1º:MECANICA IMECANICA I
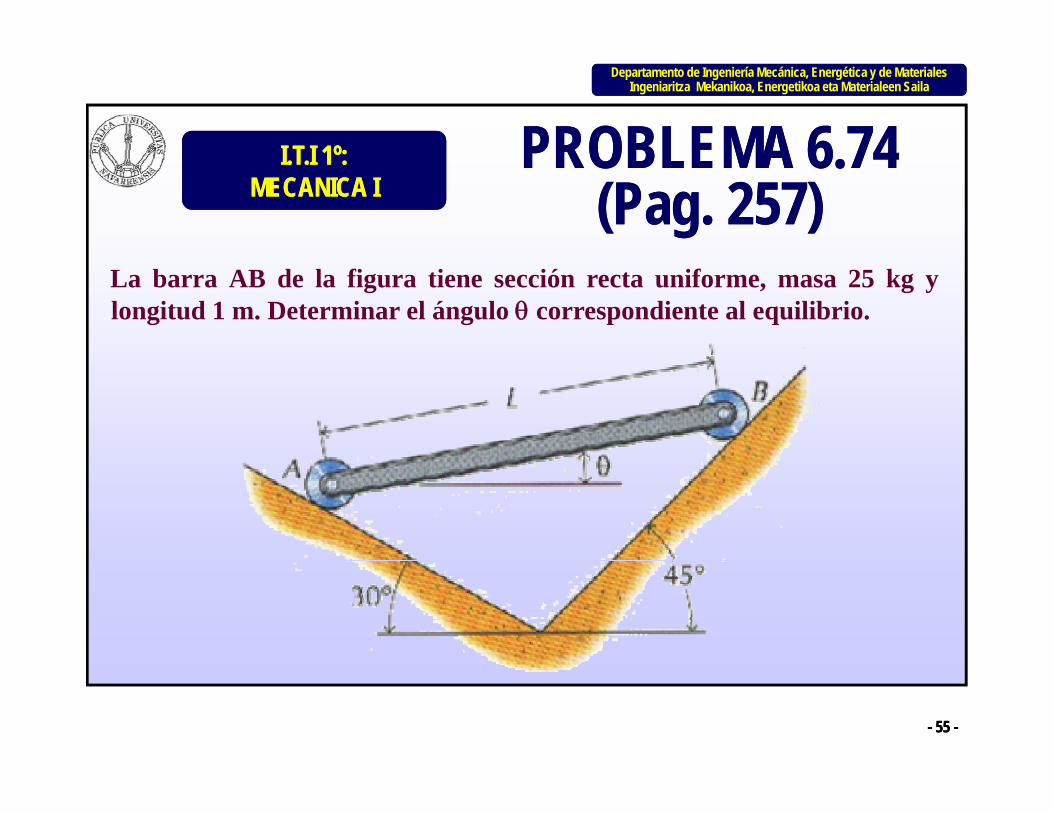
PROBLEMA 6.74PROBLEMA 6.74(Pag. 257)(Pag. 257)
La barra AB de la figura tiene sección recta uniforme, masa 25 kg ylongitud 1 m. Determinar el ángulo correspondiente al equilibrio.
-- 5555 --