elementos de mecatrónica - up robotics · necesidad de instrumentos de medida que suplan estas...
TRANSCRIPT

Elementos de Mecatrónica
Dr. José Sebastián Gutiérrez Calderón Profesor Investigador - Ingenierías UP [email protected]

Lineamientos • Respeto al Compañero y al Profesor
• Participación en las Clases
• Trabajo en Equipo
• No copia y No plagios
2

Antes de comenzar • ¿Han programado algún tipo de microcontrolador?
• ¿Alguna tarjeta embebida? ¿Cuáles?
• ¿Qué tipo de lenguajes de programación conocen?
3
Evaluación
Proyectos de Laboratorio: 100 %
• Proyecto funcionando correctamente: 20%
• Proyecto bien terminado (cableado, buena presentación): 20%
• Documentación en formato IEEE: 60%
4

Evaluación
Importante: • Después de la fecha y hora de entrega del proyecto, el valor de
la práctica tomará un valor del 50%
• Exámenes de recuperación en cada parcial
• Horario: Miércoles 5 a 7 pm y Viernes 4 a 6 pm
• Después de clase teórica se tendrá la clase práctica
5

Bibliografía LIBROS
Introducción a la mecatrónica y los sistemas de medición
David Alciatore, 3ra. Edición, McGraw-Hill Interamericana, 2008
ISBN: 9789701063859
Mecatrónica : sistemas de control electrónico en la ingeniería mecánica y eléctrica
W. Bolton; trad. Francisco J. Rodríguez Ramírez, 3ra. Edición, Alfaomega, 2006
ISBN: 9701511174
Mecatrónica
Sabri Cetinkunt; trad. Javier León Cárdenas, 1era Edición, Grupo Editorial Patria, 2007
ISBN: 9789708170765
ARTÍCULOS
Scopus.com / ScienceDirect.com
6

Temas generales del curso
• Conceptos básicos de la mecatrónica
• Características principales de los transductores
• Sensores y sistemas de medición
• Actuadores y mandos
• Mecanismos para la automatización
• Control por computadora
7
Unidad 1: Conceptos básicos de la mecatrónica
1. Definición de mecatrónica y componentes de un sistema mecatrónico
2. Sistemas generales de medición
3. Cantidad física
4. Medición, exactitud y precisión
5. Concepto de transductor, sensor y actuador
8

ó ó
ó
9
Unidad 1: Conceptos básicos de la mecatrónica

10
¿Qué es la mecatrónica?
Es la integración sinérgica de tres campos de ingeniería tradicional para el proceso de diseño a nivel de sistema.
• Ingeniería mecánica • Eléctrica o electrónica • Informática
11
Un ingeniero es aquel individuo que esta
capacitado para realizar las siguientes funciones:

12
Diseñar e implementar componentes mecánicos de un producto o proceso. 1.

13
Diseñar e implementar componentes eléctricos (actuadores, sensores) y algoritmos de control.
2.

14
Diseñar e implementar el software de cómputo para controlar producto o proceso en tiempo real.
3.

15
Componentes de un sistema
mecatrónico

Analogía entre un sistema de control manual (a) y uno automatizado (b).
16
(a)
(b)

17
Componentes de un sistema mecatrónico

18
19
Sensores Ejemplos de Sensores: • Temperatura: termopar, termistores • Deformación: galga extensiométrica • Luz: fotorresistencia, fotodiodos • Sonido: ultrasónicos

20
Sensores • Son dispositivos electrónicos que nos permiten
interactuar con el entorno. • Nos proporcionan información de ciertas variables para
procesarlas y generar órdenes o activar procesos. • Son los « ojos » de un sistema. • Sirven para la medición de variables como la
temperatura, presión, fuerza, esfuerzo, posición, velocidad, aceleración, flujo, etc.

21

22
Actuadores • Son los «músculos» de un sistema. • Dispositivos capaces de generar una fuerza a partir de
líquidos, energía eléctrica y gaseosa. • Dispositivo inherentemente mecánico cuya función es
proporcionar fuerza para mover o « actuar » otro dispositivo mecánico.
Existen tres tipos de actuadores: • Hidráulicos • Neumáticos • Eléctricos
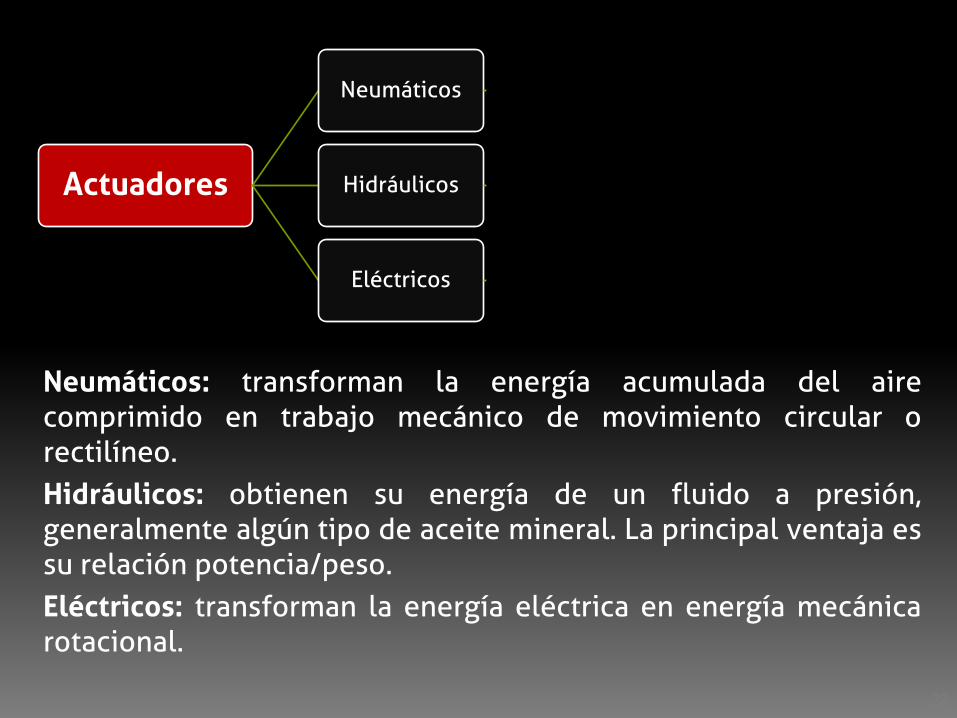
Neumáticos: transforman la energía acumulada del aire comprimido en trabajo mecánico de movimiento circular o rectilíneo.
Hidráulicos: obtienen su energía de un fluido a presión, generalmente algún tipo de aceite mineral. La principal ventaja es su relación potencia/peso.
Eléctricos: transforman la energía eléctrica en energía mecánica rotacional.
23
Actuadores
Neumáticos Fuente de
energía: aire a presión
Pistones, motores, válvulas
Hidráulicos Fuente de
energía: fluido
Pistones, motores, válvulas
Eléctricos Fuente de energía:
electricidad
Motores AC, DC, pasos,
servomotores
ó
24

El ser humano percibe información del mundo a través
de sus sentidos, pero no todos lo percibimos de la misma
manera.
Sistemas de medición
25

Nuestros sentidos son incapaces de apreciar ciertas variables
físicas.
Sistemas de medición
26

Necesidad de instrumentos de medida que suplan estas deficiencias.
Sistemas de medición
27
Temp. 50°

28
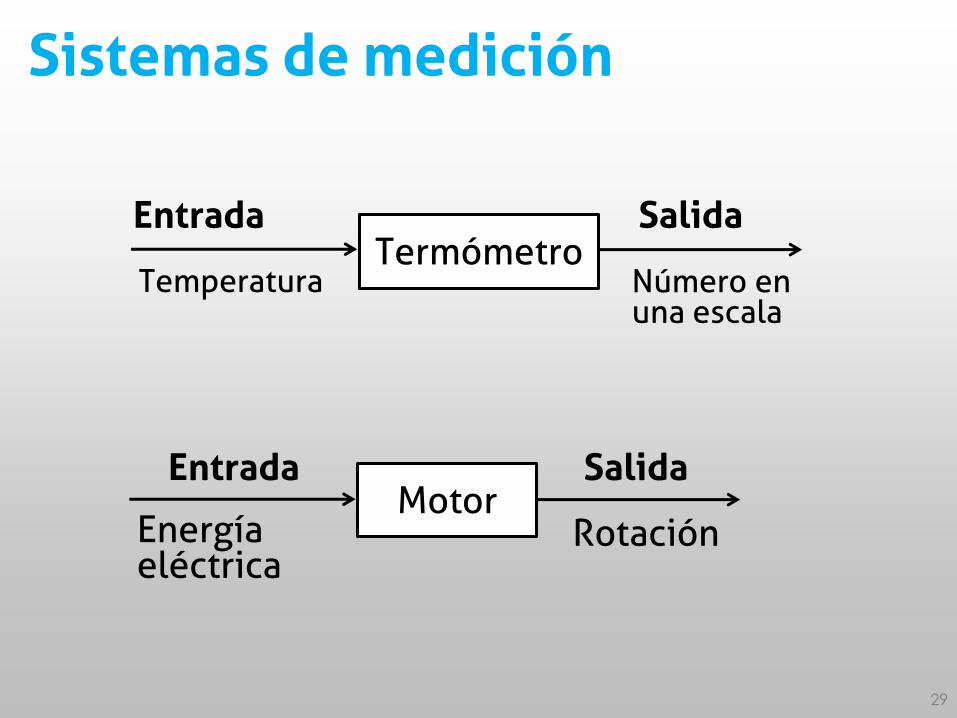
Sistemas de medición
Un sistema consiste en una caja negra con
una entrada y una salida.
Su Entrada es la
magnitud que se desea medir y su Salida es el
valor correspondiente a dicha magnitud.
Sistema de medida
Entrada
-Temperatura -Presión -Velocidad -Luz -pH
Salida
-Visualización -Almacenamiento
29
Termómetro Entrada
Temperatura
Salida
Número en una escala
Sistemas de medición
Motor Entrada
Energía eléctrica
Salida
Rotación

1. Sensor: es la cantidad que se mide, dando como salida una señal eléctrica (voltaje o corriente) relacionada con dicha medida.
2. Acondicionador: toma la señal del sensor y la manipula para
convertirla a una forma adecuada para su presentación visual (amplificación, filtrado).
3. Presentación visual: (indicador análogo o digital) donde se
despliega la salida producida por el acondicionador de señal.
30
Sensor Entrada
Temperatura
Salida
Lectura
Acondicionador de Señal
Presentación visual
Sistemas de medición Están formados por tres elementos:

í
31

32
Cantidad física
El diseño de un sensor y un transductor siempre involucra
la aplicación de alguna ley o principio de la física o la química que relaciona la
variable de interés con alguna cantidad mensurable.
33
Efecto Doppler » donde la frecuencia recibida de una fuente de onda (sonido o luz) depende de la velocidad de la fuente.
Velocímetro láser Doppler (LDV) usa la frecuencia de luz láser reflejada en las
partículas suspendidas en un flujo para medir su velocidad.

34
Efecto Fotovoltaico » cuando la luz golpea un semiconductor en contacto con una base metálica, se produce voltaje.
La operación de una celda solar se basa en este efecto.

35
Efecto fotoconductor » cuando la luz golpea ciertos materiales semiconductores, la resistencia del material disminuye.
Fotodiodo funciona con base a este efecto.
Efecto Kerr » aplicar un voltaje a través de una sustancia puede producir polarización óptica.
Las pantallas de cristal líquido (LCD) funcionan como resultado de este principio.

36
Principio de Arquímedes » » la fuerza de flotación ejercida sobre un objeto sumergido o que flota es igual al peso del fluido desplazado. El volumen desplazado depende de la densidad del fluido.
Un hidrómetro de inmersión usa este efecto para medir la densidad de un flujo
(líquido de refrigeración automotriz)

4. Medición, exactitud, y precisión
37

• Medición: asignar números o símbolos para poder clasificar un algo o un fenómeno.
• Exactitud: grado de concordancia entre el valor medio y el valor verdadero.
• Precisión: cuando concuerdan dos o más mediciones de una misma cantidad.
38
Definiciones: Medición, exactitud, y precisión
𝑬𝒓𝒓𝒐𝒓

39
Medición, exactitud, y precisión
𝑬𝒓𝒓𝒐𝒓 𝒂𝒃𝒔𝒐𝒍𝒖𝒕𝒐 = 𝒗𝒂𝒍𝒐𝒓 𝒎𝒆𝒅𝒊𝒅𝒐 − 𝒗𝒂𝒍𝒐𝒓 𝒓𝒆𝒂𝒍
𝑬𝒓𝒓𝒐𝒓 𝒓𝒆𝒍𝒂𝒕𝒊𝒗𝒐 =𝒗𝒂𝒍𝒐𝒓 𝒎𝒆𝒅𝒊𝒅𝒐 − 𝒗𝒂𝒍𝒐𝒓 𝒓𝒆𝒂𝒍
𝒗𝒂𝒍𝒐𝒓 𝒓𝒆𝒂𝒍
Error: es la diferencia entre el resultado de una medición y el valor verdadero de la cantidad que se mide.

40
Medidas Errores absolutos Errores relativos
3.01 s 3.01 – 3.12 = - 0.11 s -0.11 / 3.12 = - 0.036 (- 3.6%)
3.11 s 3.11 -3.12 = - 0.01 s -0.01 / 3.12 = - 0.003 (- 0.3%)
3.20 s 3.20 -3.12 = + 0.08 s +0.08 / 3.12 = + 0.026 (+ 2.6%)
3.15 s 3.15 – 3.12 = + 0.03 s +0.03 / 3.12 = + 0.010 (+ 1.0%)
Medición, exactitud, y precisión Ejemplo:
Las medidas de tiempo de un recorrido efectuadas por diferentes alumnos son: 3.01 s; 3.11 s; 3.20 s; 3.15 s
Valor que se considera exacto:
𝑿𝒊 =𝟑. 𝟎𝟏 + 𝟑. 𝟎𝟏𝟏 + 𝟑. 𝟐𝟎 + 𝟑. 𝟏𝟓
𝟒= 𝟑. 𝟏𝟏𝟕 = 𝟑. 𝟏𝟐
¿Errores absoluto y relativo de cada medida?

41

Sensor La clasificación de los sensores es de acuerdo a la magnitud medida (sensores de temperatura,
presión, humedad, proximidad, aceleración, velocidad, fuerza, etc.)
La clasificación no es absoluta ya que la
cantidad de magnitudes físicas que se pueden medir es muy grande.
42
Transductor, Sensor y Actuador

Sensor Existen diversos criterios de clasificación, siendo los más importantes los siguientes:
• Por la señal de salida generada por el sensor (análogo, digital)
• Por el aporte de Energía. (pasivo y activo) • Por el modo de operación (deflexión y
comparación) • Por la relación Entrada/Salida (orden cero, 1er.
orden, 2do. orden)
43
Transductor, Sensor y Actuador

Sensor - Señal de salida (análogo-digital)
44
Transductor, Sensor y Actuador
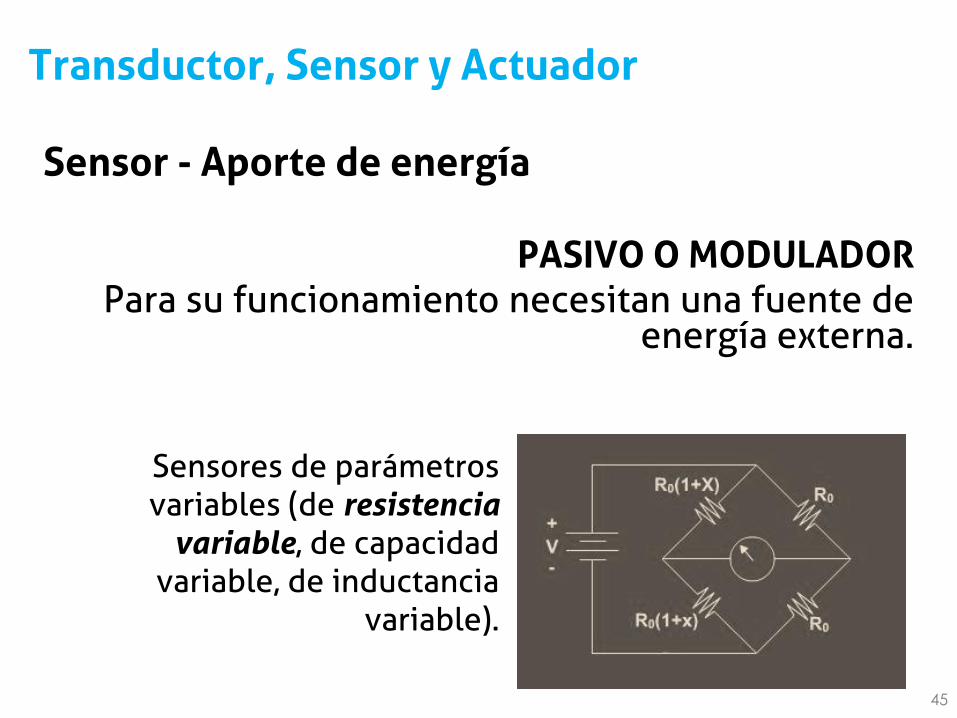
Sensor - Aporte de energía
PASIVO O MODULADOR Para su funcionamiento necesitan una fuente de
energía externa.
45
Sensores de parámetros variables (de resistencia
variable, de capacidad variable, de inductancia
variable).
Transductor, Sensor y Actuador

Sensor - Aporte de energía
ACTIVO O GENERADOR No necesitan alimentación auxiliar. Convierten
parte de la energía de la variable a medir en energía eléctrica para la salida del sensor.
46
Sensores piezoeléctricos, fotovoltaicos, termoeléctricos, electroquímicos, magnetoeléctricos.
Transductor, Sensor y Actuador

Transductor Elemento o dispositivo que tiene la misión de transformar, traducir o adaptar un tipo
de variable física (por ejemplo fuerza, presión, temperatura, velocidad, etc.) en
otro más adecuado para el sistema.
47
Transductor, Sensor y Actuador
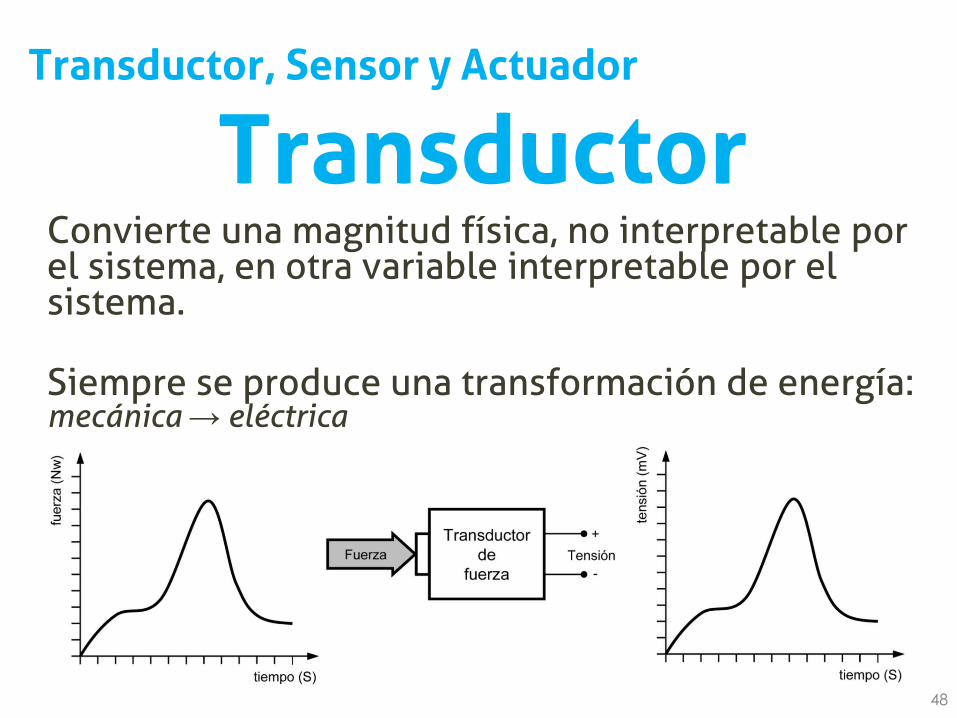
Transductor Convierte una magnitud física, no interpretable por el sistema, en otra variable interpretable por el sistema. Siempre se produce una transformación de energía: mecánica → eléctrica
48
Transductor, Sensor y Actuador
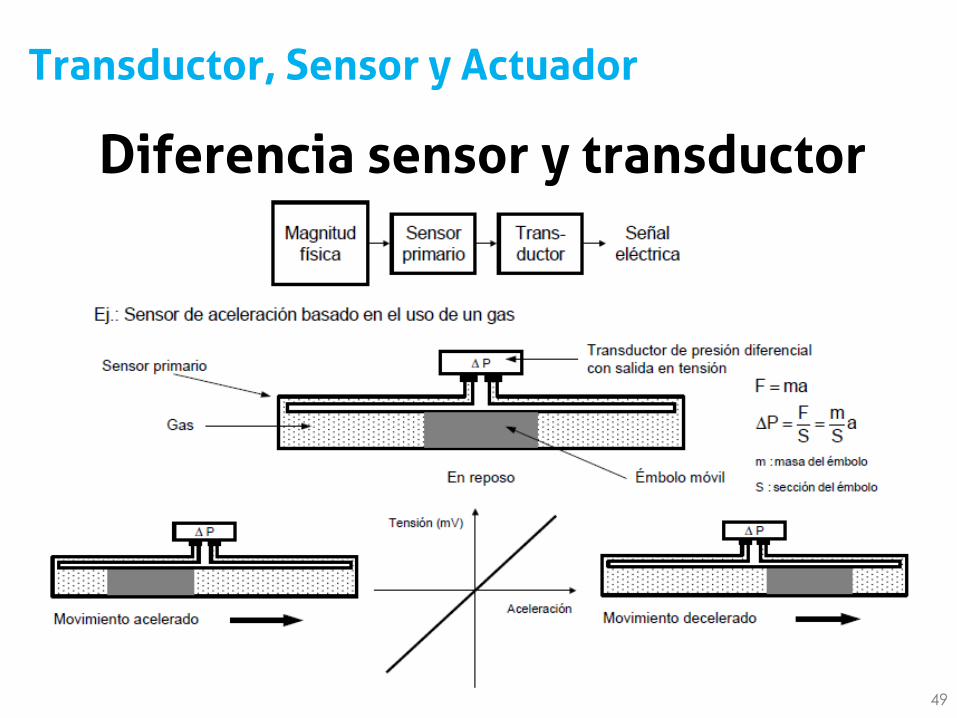
Diferencia sensor y transductor
49
Transductor, Sensor y Actuador

Diferencia sensor y transductor
50
Transductor, Sensor y Actuador
sensor
transductor

Actuador Elemento capaz de intervenir en el proceso que pretendemos controlar, su clasificación es según el tipo de energía empleada: • Actuadores eléctricos • Actuadores neumáticos • Actuadores hidráulicos
51
Transductor, Sensor y Actuador

Actuador
52
Transductor, Sensor y Actuador
Proyecto de laboratorio 1
53

Proyecto de laboratorio 1
54
Realizar un sistema de medición de temperatura controlado por un microcontrolador, obteniendo en tiempo real los datos de la temperatura y publicados en una página HTML.
Objetivo:
Características del sistema: • La temperatura del sistema se debe encontrar siempre en una
temperatura óptima entre 20 y 25˚C. • En el caso de exceder los 25˚C, entraría en operación un ventilador que
regularía la temperatura al rango óptimo. • En el caso de estar por debajo de los 20˚C, entraría en operación un
calentador que regularía la temperatura mediante el funcionamiento de un foco (60 Watts) conectado a corriente alterna (110 V).
Proyecto de laboratorio 1
55
Material: • Microprocesador (AVR con ADC) o tarjeta embebida (Arduino) • Computadora con puerto serie • Cable USB-Serial • Sensor de temperatura LM35 o Sensor DHT11 • Ventilador de computadora • Relevador (RAS-0510) • Foco con socket y cableado

Proyecto de laboratorio 1
56
Entrega del proyecto: • Tiempo de 1 hora y 30 minutos para entregar el proyecto. • Viernes 12/Enero se trabajará en el laboratorio (adaptación a la forma
de trabajo) y el Miércoles 17/Enero se realizará la primera entrega. • Documentación en formato de artículo IEEE a doble columna, entregar la
siguiente clase después de presentar el proyecto aprobado. • Enviar documento en Word y código fuente del proyecto. • Documentación sin haber aprobado la entrega, no se acepta.

Proyecto de laboratorio 1
57
Página: robotica-up.org/mecatronica En esta página se estarán guardando las presentaciones de cada una de las clases así como los proyectos de laboratorio y se tendrá acceso a documentación y código exclusivo para la clase. *Se sustituye Moodle por la página.

Proyecto de laboratorio 1
58
Herramientas necesarias • Instalar Visual Basic • Instalar ADE Arduino • Entrar al sitio robotica-up.org/mecatronica • En la sección Laboratorio, utilizar los archivos
• Leer TXT en HTML • Conexión Serial Arduino VB

59
(ʘ‿ʘ)