diseño e implementación de banco de pruebas para la
TRANSCRIPT
Diseño e implementación de banco de pruebas para la
caracterización de trenes de potencia eléctricos usados en
vehículos ligeros
Proyecto de grado
Autor:
Juan Carlos Solarte Montero
Profesor asesor:
Andrés González Mancera Ph.D.
Profesor asociado
Universidad de los Andes
Facultad de Ingeniería
Departamento de Ingeniería Mecánica
Bogotá D.C., Colombia
Enero de 2019
1
Contenido
1. Nomenclatura .............................................................................................................................. 5
2. Introducción ................................................................................................................................ 6
3.Objetivos ...................................................................................................................................... 8
3.1 Objetivo General ................................................................................................................... 8
3.2 Objetivos Específicos............................................................................................................ 8
4. Metodología ................................................................................................................................ 9
4.1 Investigación normativa y técnica ........................................................................................ 9
4.2 Selección de instrumentación y equipos ............................................................................. 10
Aplicación de carga............................................................................................................... 11
Medición de momento par .................................................................................................... 11
Medición de velocidad angular ............................................................................................. 12
Medición de corriente ........................................................................................................... 13
Medición de voltaje............................................................................................................... 13
Sistema de adquisición de datos ........................................................................................... 14
4.3 Diseño y manufactura de piezas mecánicas ........................................................................ 14
Diseño de soporte de dinamómetro hidráulico ..................................................................... 15
Diseño de soporte del motor ................................................................................................. 15
Selección de acople entre eje de motor y eje de dinamómetro ............................................. 16
4.4 Diseño de interfaz para control de nivel de acelerador ....................................................... 17
5. Resultados ................................................................................................................................. 19
5.1 Procedimiento de ensamble ................................................................................................ 19
5.2 Procedimiento de alineación de ejes ................................................................................... 23
5.3 Protocolo de pruebas ........................................................................................................... 25
5.4 Código de Python para post-procesamiento de datos ......................................................... 29
5.5 Validación ........................................................................................................................... 30
6. Conclusión ................................................................................................................................ 34
7. Recomendaciones y sugerencias ............................................................................................... 35
8. Bibliografía ............................................................................................................................... 36
9. Anexos ...................................................................................................................................... 37
A. Calibración de celda de carga .............................................................................................. 37
B. Planos de bases de diseño..................................................................................................... 38
C. Planos de piezas ................................................................................................................... 39
D. Código de Arduino de controlador de nivel de acelerador .................................................. 42

2
E. Código de post-procesamiento en Python ............................................................................ 43
3
Lista de Tablas TABLA 1 VARIABLES DE MEDICIÓN 10 TABLA 2 RANGO DE VARIABLES A MEDIR 10 TABLA 3 PROPIEDADES DE FRENO HIDRÁULICO DE 100 KW 11 TABLA 4 CARACTERÍSTICAS DE CELDA DE CARGA LEXUS SA-BN-50KG 12 TABLA 5 RESULTADOS DE LA CALIBRACIÓN DE CELDA DE CARGA LEXUS SA-BN-50KG 12 TABLA 6 CARACTERÍSTICAS DE TACÓMETRO ÓPTICO EXTECH RPM10 13 TABLA 7 ESPECIFICACIONES DE SHUNT SMAKN FL-2 500 A 13 TABLA 8 LISTA DE INSTRUMENTOS DE MEDICIÓN 14 TABLA 9 CARACTERÍSTICAS DEL MÓDULO NI-9205 14 TABLA 10 CARACTERÍSTICAS DE ACOPLE INTERFLEX® GE28 16 TABLA 11 CARACTERÍSTICAS DE ACOPLE AL MOTOR 16 TABLA 12 CARACTERÍSTICAS DE ACOPLE AL DINAMÓMETRO 16 TABLA 13 PROCEDIMIENTO DE CORRECCIÓN DE DESALINEACIÓN VERTICAL PARALELA 25 TABLA 14 PROCEDIMIENTO DE CORRECCIÓN DE DESALINEACIÓN HORIZONTAL PARALELA 25 TABLA 15 VALORES ESPERADOS EN PRUEBAS SIN CARGA 27 TABLA 16 CARACTERÍSTICAS DEL MOTOR MOTENERGY ME1117 31 TABLA 17 CARACTERÍSTICAS DEL CONTROLADOR SEVCON GEN4 SIZE4 31
4
Lista de Figuras FIGURA 1 DIAGRAMA DE CUERPO LIBRE DE VEHÍCULO ............................................................................ 6 FIGURA 2 MALLA DE PUNTOS DE PRUEBA ..................................................................................................... 9 FIGURA 3 ESQUEMA DE CONEXIÓN DEL CONTROLADOR USADO .......................................................... 17 FIGURA 4 ESQUEMA DE MCP41010 CON ARDUINO UNO ........................................................................................ 18 FIGURA 5 MONTAJE CON EL TREN DE POTENCIA DEL KART ELÉCTRICO................................................................... 30 FIGURA 6 RESULTADOS DE PRUEBAS DE MAPEO SOBRE EL TREN DE POTENCIA DEL KART ........... 31 FIGURA 7 MAPA DE EFICIENCIAS DEL TREN DE POTENCIA DEL KART .................................................. 32 FIGURA 8 GRÁFICA CONSOLIDADA DE DATOS DE CALIBRACIÓN DE CELDA DE CARGA OMEGA
TQ501-5K, .................................................................................................................................................... 37 FIGURA 9 PLANOS DE FABRICANTE DE MOTOR MOTENERGY ME1117 .................................................. 38 FIGURA 10 PLANOS DE SOPORTE PARA CHUMACERAS TIPO A................................................................ 39 FIGURA 11 PLANOS DE SOPORTE PARA CHUMACERAS TIPO B ................................................................ 39 FIGURA 12 PLANOS DE SOPORTE A PARA EL MOTOR ................................................................................ 40 FIGURA 13 PLANOS DE SOPORTE B PARA EL MOTOR ................................................................................ 40 FIGURA 14 PLANOS DE OMEGA GRANDE ...................................................................................................... 41 FIGURA 15 PLANOS DE PERFIL RECTANGULAR DE 100 MM X 50 MM X 1 M .......................................... 41
5
1. Nomenclatura
𝜔 Velocidad Angular 𝑙𝑏𝑟𝑎𝑧𝑜 Brazo de palanca del
freno hidráulico
𝜏 Par torsional 𝐹𝑐𝑒𝑙𝑑𝑎 Fuerza soportada por
celda de carga
𝑚 Masa 𝑄 Caudal
𝑎𝑥 Aceleración
longitudinal 𝜂𝑚 Eficiencia mecánica
𝐷𝑎 Fuerza de arrastre
aerodinámico 𝑃𝑚 Potencia mecánica
𝐹𝑟 Fuerza de resistencia
a la rodadura 𝑃𝑒 Potencia eléctrica
𝐹𝑡 Fuerza de tracción 𝑉 Voltaje

6
2. Introducción
Un vehículo ligero se define como aquel en que la relación entre masa del vehículo a masa del
piloto es menor o igual a dos. [1] Dentro de este grupo se encuentran un amplio grupo de máquinas,
muchas usadas en el transporte de miles de personas día a día.
Para caracterizar la dinámica de movimiento de estos dispositivos se puede utilizar el modelo
simplificado:
Figura 1 Diagrama de cuerpo libre de vehículo
𝑚 𝑎𝑥 = 𝐹𝑡 − 𝐷𝑎 − 𝐹𝑟 − 𝑊 𝑠𝑖𝑛(𝜃) 1
[2]
Para el caso de las versiones eléctricas de estos vehículos, las fuerza Ft es atribuible a la labor de
un tren de potencia eléctrico.
Partiendo de lo anterior, tener una buena caracterización del comportamiento mecánico del tren de
potencia usado en estos es de vital importancia, por un lado, para predecir la conducta del vehículo
en condiciones de trabajo; y por otro, para realizar la cuantificación de las fuerzas 𝐷𝑎 y 𝐹𝑟 por
métodos experimentales.
Adicional a lo anterior, la obtención de las curvas del motor incluye también una determinación
del consumo y eficiencia del equipo en distintas condiciones de carga. Esto permite tener un punto
de comparación entre motores usados en aplicaciones similares, al igual, que abre la puerta a
trabajos de predicción y optimización de consumo energético en el vehículo.
El departamento de Ingeniería Mecánica de la Universidad de los Andes no cuenta con un banco
de pruebas con las características necesarias para probar los trenes de potencia usados en este tipo
de aplicaciones. Sin embargo, cuenta con el espacio y capacidad para uno. De igual manera, en el
marco de BTA Racing, uno de los proyectos estudiantiles del departamento, se tiene un tren de
potencia eléctrico, usado para la locomoción de un kart, que se puede usar como caso de estudio.
𝜃
𝑥
𝑦
𝐹𝑡
𝐷𝑎
𝐹𝑟
𝑊

7
En este proyecto se pretende, diseñar e implementar un banco de pruebas para caracterizar trenes
de potencia eléctricos para aplicaciones vehiculares ligeras, tomando como caso base el tren de
potencia conformado por el motor ME1117 y el controlador Sevcon Gen4 Size 4, usado en el kart
eléctrico del departamento.
8
3.Objetivos
3.1 Objetivo General Diseño e implementación de un banco de pruebas para caracterizar la eficiencia de trenes de
potencia eléctricos usados en vehículos ligeros.
3.2 Objetivos Específicos
• Investigar sobre las normas y protocolos pertinentes a la caracterización de trenes de potencia
eléctricos.
• Diseñar y construir un banco de pruebas de acuerdo con los requerimientos impuestos.
• Diseñar un protocolo de pruebas y las herramientas para su implementación.
9
4. Metodología
4.1 Investigación normativa y técnica
Antes de realizar el diseño del banco de pruebas se realizó una investigación de las normativas
referentes a la caracterización del rendimiento de motores eléctricos, en especial, para aplicaciones
vehiculares.
En este contexto se tomó como referencia las normas [3], [4], [5] y [6] y los trabajos previos de
[7] y [8]. De estos se obtienen los requerimientos del banco de pruebas y los lineamientos generales
para el protocolo de pruebas.
En cuanto a los requerimientos, queda claro que, primero, se necesitan equipos capaces de medir,
par torsional y velocidad angular a la salida del tren de potencia y la corriente y voltaje a la entrada
del controlador del tren. Segundo, se debe poseer un mecanismo capaz de variar la carga que
soporta el motor. Tercero, asegurar la estabilidad de las características del motor. Y Cuarto, un
montaje capaz de asegurar la estabilidad en las mediciones.
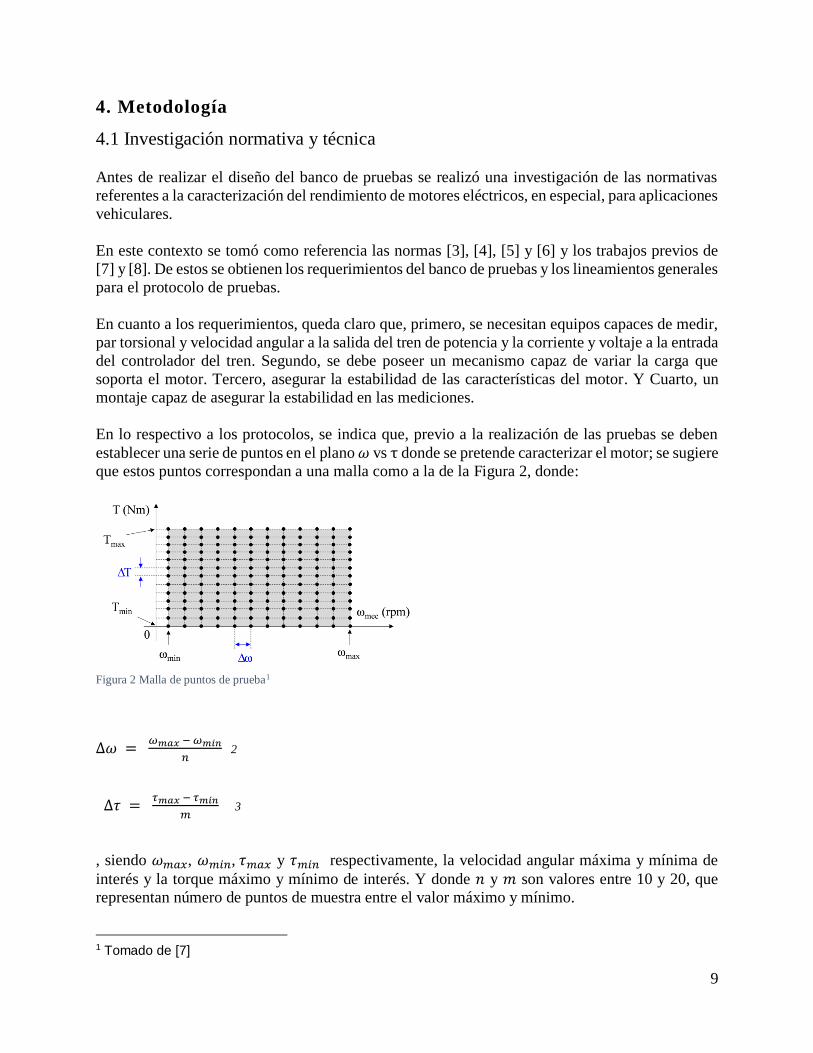
En lo respectivo a los protocolos, se indica que, previo a la realización de las pruebas se deben
establecer una serie de puntos en el plano 𝜔 vs τ donde se pretende caracterizar el motor; se sugiere
que estos puntos correspondan a una malla como a la de la Figura 2, donde:
Figura 2 Malla de puntos de prueba1
∆𝜔 = 𝜔𝑚𝑎𝑥 − 𝜔𝑚𝑖𝑛
𝑛 2
∆𝜏 = 𝜏𝑚𝑎𝑥 − 𝜏𝑚𝑖𝑛
𝑚 3
, siendo 𝜔𝑚𝑎𝑥, 𝜔𝑚𝑖𝑛, 𝜏𝑚𝑎𝑥 y 𝜏𝑚𝑖𝑛 respectivamente, la velocidad angular máxima y mínima de
interés y la torque máximo y mínimo de interés. Y donde 𝑛 y 𝑚 son valores entre 10 y 20, que
representan número de puntos de muestra entre el valor máximo y mínimo.
1 Tomado de [7]
10
De igual manera establecen que para el barrido sobre los puntos de interés, se realicen una serie
de intentos donde en cada uno se mantenga un nivel de velocidad, torque o potencia constante,
pero distinto en cada intento, a la vez que se aumente el nivel de carga para moverse del punto
inicial del intento al próximo punto de interés durante cada intento.
Por otro lado, se realiza una investigación general sobre los procedimientos de alineación de ejes.
A partir de esta se obtiene algunos lineamientos generales para el proceso, primero, cuando se va
a realizar un proceso de alineación, siempre hay un equipo que permanece estático y otro que se
mueve, es decir, siempre se alinea un equipo con respecto a otro. Segundo, la selección de que
equipo se mueve y cual no, se realiza en virtud de la facilidad para modificar la posición de cada
uno. Y tercero, para el proceso de alineación se requiere, instrumentos que permitan medir o
calcular la desalineación del eje de un equipo con respecto al del otro, y calzas, para corregir la
desalineación medida.
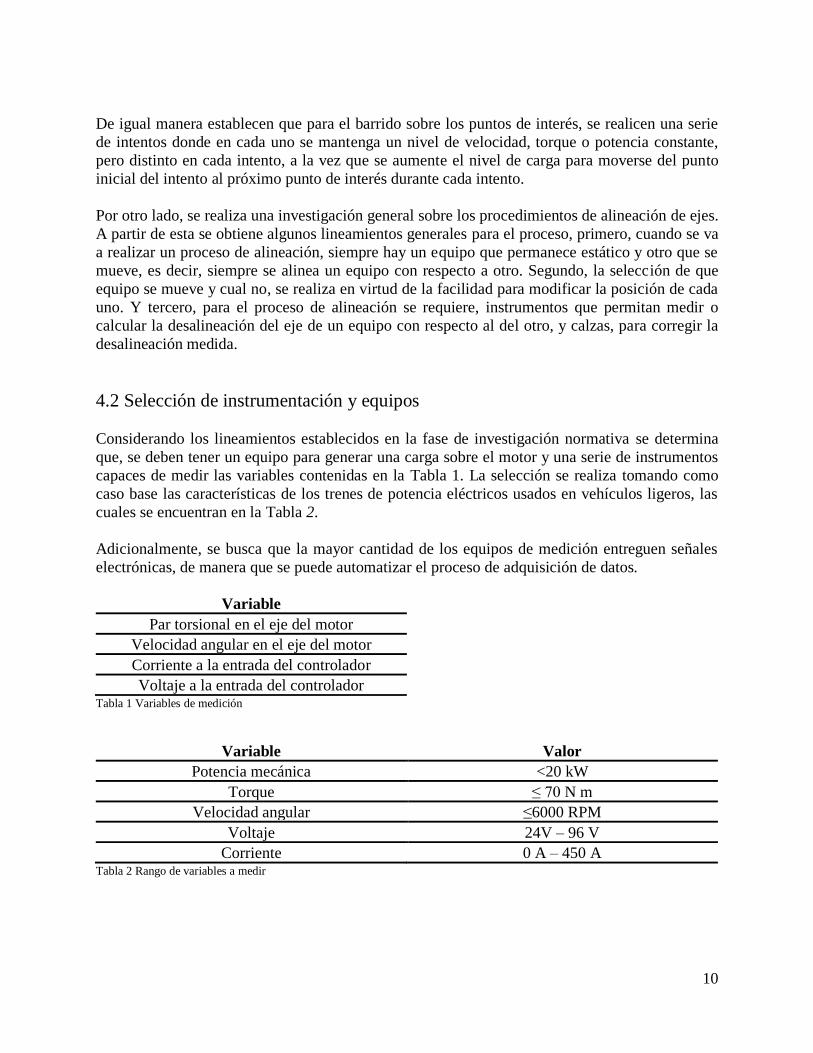
4.2 Selección de instrumentación y equipos
Considerando los lineamientos establecidos en la fase de investigación normativa se determina
que, se deben tener un equipo para generar una carga sobre el motor y una serie de instrumentos
capaces de medir las variables contenidas en la Tabla 1. La selección se realiza tomando como
caso base las características de los trenes de potencia eléctricos usados en vehículos ligeros, las
cuales se encuentran en la Tabla 2.
Adicionalmente, se busca que la mayor cantidad de los equipos de medición entreguen señales
electrónicas, de manera que se puede automatizar el proceso de adquisición de datos.
Variable
Par torsional en el eje del motor
Velocidad angular en el eje del motor
Corriente a la entrada del controlador
Voltaje a la entrada del controlador Tabla 1 Variables de medición
Variable Valor
Potencia mecánica <20 kW
Torque ≤ 70 N m
Velocidad angular ≤6000 RPM
Voltaje 24V – 96 V
Corriente 0 A – 450 A Tabla 2 Rango de variables a medir
11
Aplicación de carga
Se realiza una investigación sobre los equipos para aplicar carga que se utilizan en esta clase de
pruebas, se encuentra que hay varios tipos, entre ellos, dinamómetro de histéresis, dinamómetro
de corrientes Eddy, motores equivalentes y por último, la solución que se escogió, dinamómetro
hidráulico.
Esta es una solución que tiene una serie de problemas, entre ellos, que tiene una velocidad mínima
de operación, por ende, no se puede medir el torque de arranque del tren. Aun así, es una solución
robusta y de especial utilidad para trenes de potencia de alta potencia. Por otro lado, el
departamento cuenta con un dinamómetro hidráulico de 100 kW, diseñado por Marco Antonio
Benavides en [9] y construido por Juan Diego Umaña en [10]. Considerando la restricción
presupuesto inherente a un proyecto de grado, esta es una excelente opción de equipo para
aplicación de carga.
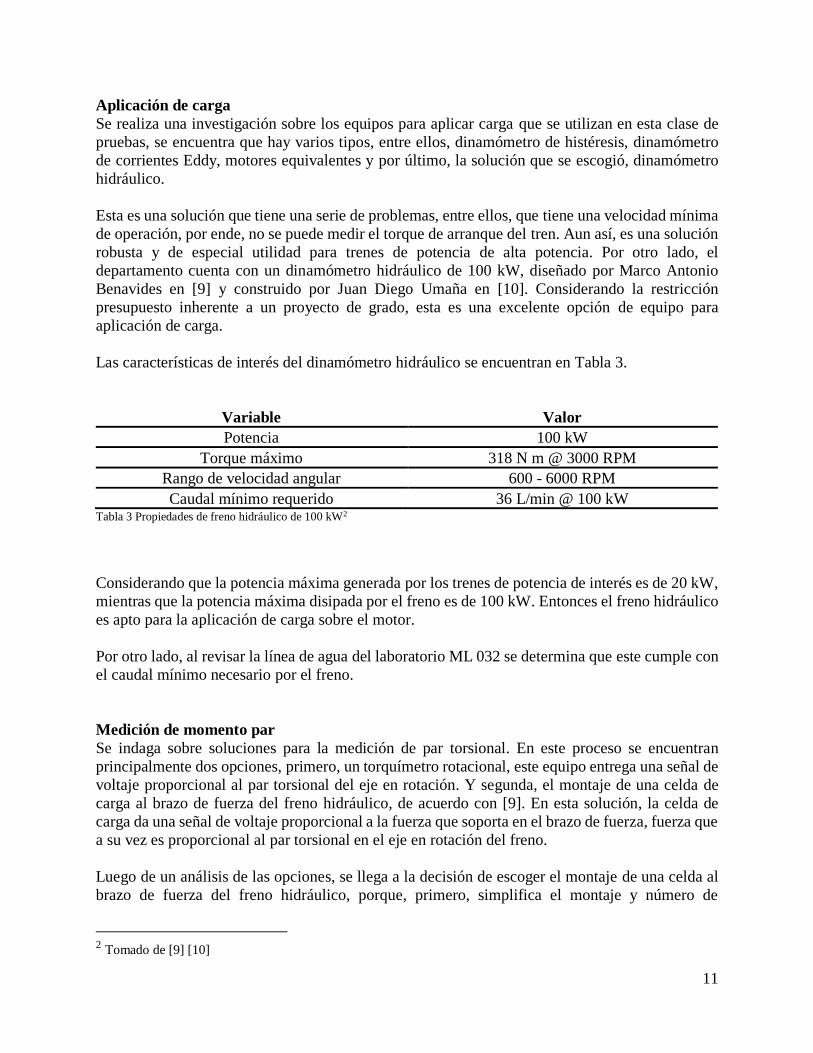
Las características de interés del dinamómetro hidráulico se encuentran en Tabla 3.
Variable Valor
Potencia 100 kW
Torque máximo 318 N m @ 3000 RPM
Rango de velocidad angular 600 - 6000 RPM
Caudal mínimo requerido 36 L/min @ 100 kW Tabla 3 Propiedades de freno hidráulico de 100 kW2
Considerando que la potencia máxima generada por los trenes de potencia de interés es de 20 kW,
mientras que la potencia máxima disipada por el freno es de 100 kW. Entonces el freno hidráulico
es apto para la aplicación de carga sobre el motor.
Por otro lado, al revisar la línea de agua del laboratorio ML 032 se determina que este cumple con
el caudal mínimo necesario por el freno.
Medición de momento par
Se indaga sobre soluciones para la medición de par torsional. En este proceso se encuentran
principalmente dos opciones, primero, un torquímetro rotacional, este equipo entrega una señal de
voltaje proporcional al par torsional del eje en rotación. Y segunda, el montaje de una celda de
carga al brazo de fuerza del freno hidráulico, de acuerdo con [9]. En esta solución, la celda de
carga da una señal de voltaje proporcional a la fuerza que soporta en el brazo de fuerza, fuerza que
a su vez es proporcional al par torsional en el eje en rotación del freno.
Luego de un análisis de las opciones, se llega a la decisión de escoger el montaje de una celda al
brazo de fuerza del freno hidráulico, porque, primero, simplifica el montaje y número de
2 Tomado de [9] [10]
12
elementos, ya que con o sin celda, se requiere un elemento para restringir la rotación del freno
durante las pruebas, por ende, este equipo cumple la función de hacer la restricción y tomar
mediciones. Segundo, porque el torquímetro cuyo rango contiene el de medición y propiedad del
departamento, el Omega TQ501-5K, tiene un rango de 564 Nm [11]. Lo cual es entre uno y dos
órdenes de magnitud más alto que los torques que se espera medir, por ende, se pierde precisión
en la medición. En contraste, el departamento si cuenta con celdas de carga que se ajustan bien al
rango de medición. Y tercero, porque la compra de un torquímetro cuyo rango se ajuste al de
medición no es viable, dadas las limitaciones de presupuesto inherentes a este proyecto de grado.
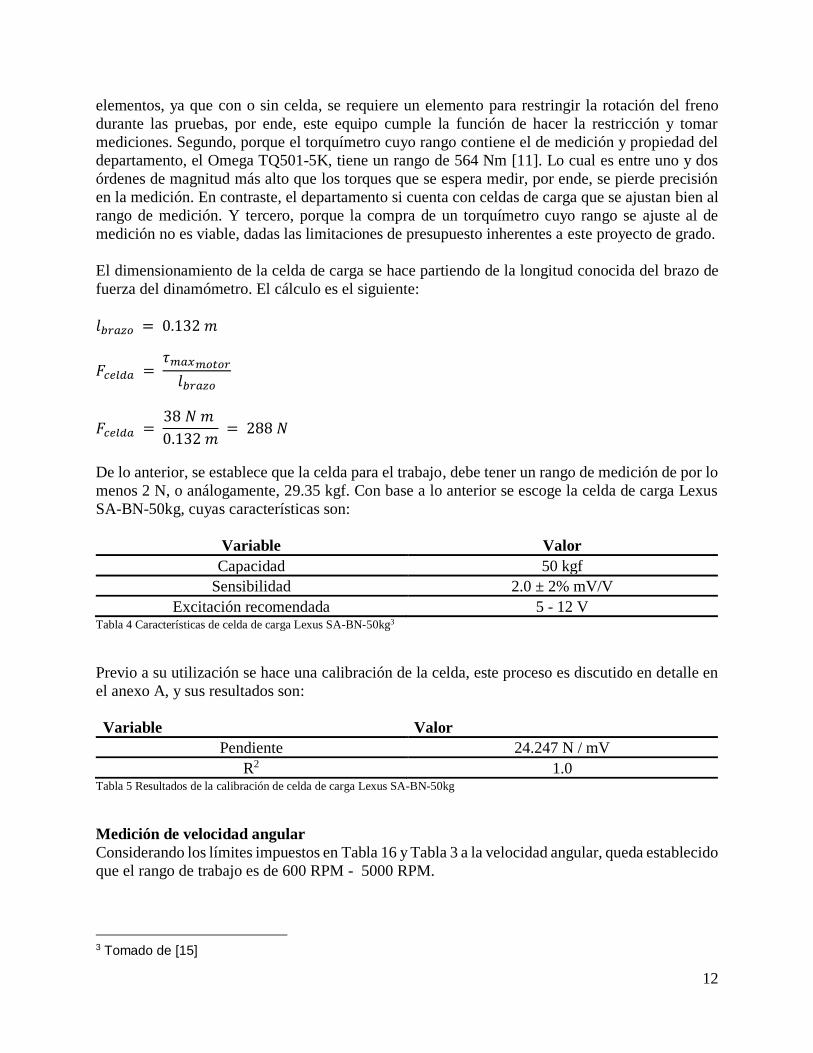
El dimensionamiento de la celda de carga se hace partiendo de la longitud conocida del brazo de
fuerza del dinamómetro. El cálculo es el siguiente:
𝑙𝑏𝑟𝑎𝑧𝑜 = 0.132 𝑚
𝐹𝑐𝑒𝑙𝑑𝑎 = 𝜏𝑚𝑎𝑥𝑚𝑜𝑡𝑜𝑟
𝑙𝑏𝑟𝑎𝑧𝑜
𝐹𝑐𝑒𝑙𝑑𝑎 = 38 𝑁 𝑚
0.132 𝑚 = 288 𝑁
De lo anterior, se establece que la celda para el trabajo, debe tener un rango de medición de por lo
menos 2 N, o análogamente, 29.35 kgf. Con base a lo anterior se escoge la celda de carga Lexus
SA-BN-50kg, cuyas características son:
Variable Valor
Capacidad 50 kgf
Sensibilidad 2.0 ± 2% mV/V
Excitación recomendada 5 - 12 V Tabla 4 Características de celda de carga Lexus SA-BN-50kg3
Previo a su utilización se hace una calibración de la celda, este proceso es discutido en detalle en
el anexo A, y sus resultados son:
Variable Valor
Pendiente 24.247 N / mV
R2 1.0 Tabla 5 Resultados de la calibración de celda de carga Lexus SA-BN-50kg
Medición de velocidad angular
Considerando los límites impuestos en Tabla 16 y Tabla 3 a la velocidad angular, queda establecido
que el rango de trabajo es de 600 RPM - 5000 RPM.
3 Tomado de [15]

13
A partir de lo anterior se indaga sobre posibles soluciones. Se obtienen tres principales, primera,
un torquímetro con tacómetro electrónico integrado. Segundo, un tacómetro electrónico en línea
con el eje. Y tercero, un tacómetro óptico.
Se escoge la última opción, ya que simplifica el montaje, al reducir el número de elementos
montados y alineados con los ejes del dinamómetro. Además, al ser un equipo que ya posee el
departamento, quita la presión presupuestal al proyecto, inherente a la adquisición de un nuevo
equipo.
Se selecciona el tacómetro óptico Extech RPM10, cuyas especificaciones están en Tabla 6. Como
se observa, cumple con el rango y precisión requeridas en las pruebas.
Variable Valor
Rango 10 – 99,999 RPM
Precisión ±0.05% Tabla 6 Características de tacómetro óptico Extech RPM104
Medición de corriente
Considerando que las corrientes que se van a medir son de valor nominal alto, se escoge hacer una
medición indirecta a través de un shunt. Este proceso consiste en la medición de la caída de voltaje
sobre una resistencia de valor nominal bajo y conocido, denominada, shunt. Las características del
shunt a usar se encuentran en la Tabla 7.
Variable Valor
Corriente máxima 500 A
Constante de voltaje 15 mV/100A Tabla 7 Especificaciones de shunt SMAKN FL-2 500 A
Como se observa, este equipo permite hacer mediciones en un rango de corriente que contiene al
de los trenes de interés.
Medición de voltaje
Considerando el rango de voltaje de entrada a los trenes de potencia de interés (Tabla 2) se realiza
una investigación de las posibles opciones para realizar la medición. Se obtiene tres opciones
principales, primero, realizar la medición con un multímetro Fluke 115. Segundo, realizar la
medición con el módulo NI-9221, que puede recibir una entrada de hasta 60 V por sus terminales.
Y tercero, realizar el montaje de un divisor de voltaje para obtener una señal entre 0V y 10 V, la
cual puede ser medida con la tarjeta NI-9205.
Se escoge la primera opción, ya que es una opción robusta y precisa. Adicionalmente, cuando se
hizo pruebas para la implementación de la última opción, se presentaron, reiterativamente,
problemas de calentamiento de las resistencias del divisor.
4 Tomado de [14]
14
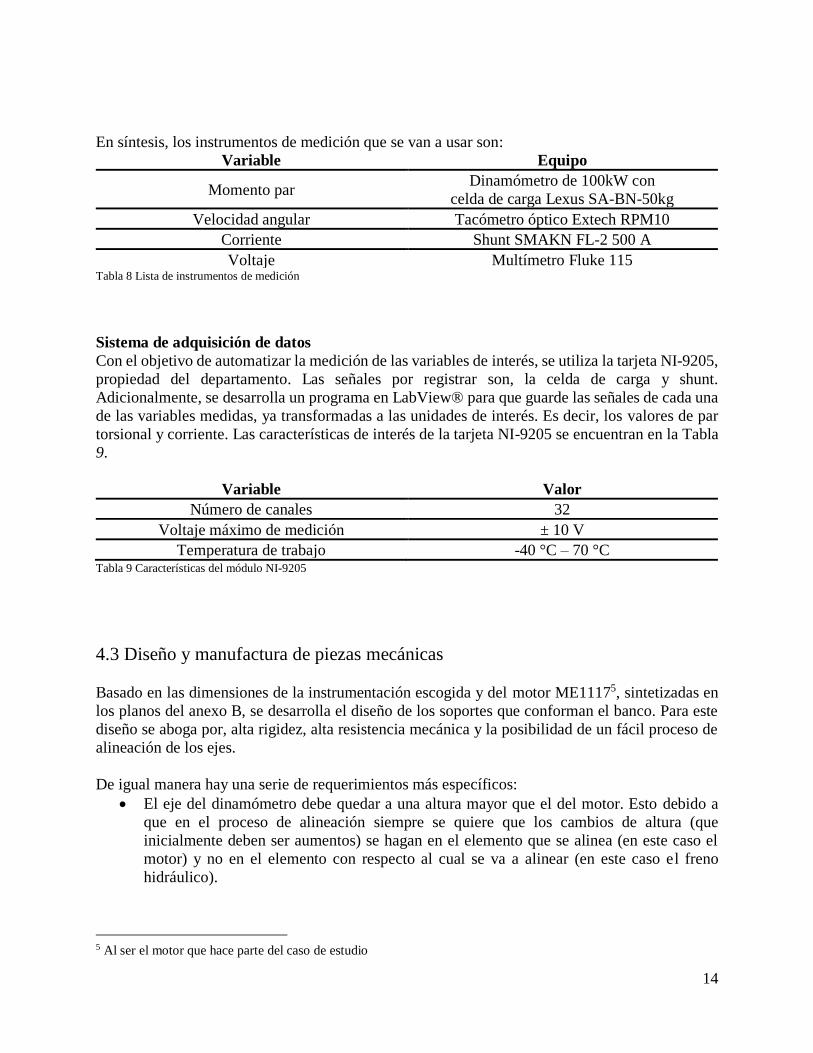
En síntesis, los instrumentos de medición que se van a usar son:
Variable Equipo
Momento par Dinamómetro de 100kW con
celda de carga Lexus SA-BN-50kg
Velocidad angular Tacómetro óptico Extech RPM10
Corriente Shunt SMAKN FL-2 500 A
Voltaje Multímetro Fluke 115 Tabla 8 Lista de instrumentos de medición
Sistema de adquisición de datos
Con el objetivo de automatizar la medición de las variables de interés, se utiliza la tarjeta NI-9205,
propiedad del departamento. Las señales por registrar son, la celda de carga y shunt.
Adicionalmente, se desarrolla un programa en LabView® para que guarde las señales de cada una
de las variables medidas, ya transformadas a las unidades de interés. Es decir, los valores de par
torsional y corriente. Las características de interés de la tarjeta NI-9205 se encuentran en la Tabla
9.
Variable Valor
Número de canales 32
Voltaje máximo de medición ± 10 V
Temperatura de trabajo -40 °C – 70 °C Tabla 9 Características del módulo NI-9205
4.3 Diseño y manufactura de piezas mecánicas
Basado en las dimensiones de la instrumentación escogida y del motor ME11175, sintetizadas en
los planos del anexo B, se desarrolla el diseño de los soportes que conforman el banco. Para este
diseño se aboga por, alta rigidez, alta resistencia mecánica y la posibilidad de un fácil proceso de
alineación de los ejes.
De igual manera hay una serie de requerimientos más específicos:
• El eje del dinamómetro debe quedar a una altura mayor que el del motor. Esto debido a
que en el proceso de alineación siempre se quiere que los cambios de altura (que
inicialmente deben ser aumentos) se hagan en el elemento que se alinea (en este caso el
motor) y no en el elemento con respecto al cual se va a alinear (en este caso el freno
hidráulico).
5 Al ser el motor que hace parte del caso de estudio
15
• La masa de los soportes debe ser máxima, dentro de los límites de presupuesto y tamaño,
con el objetivo de que el sistema tenga una baja frecuencia natural. Además, para que el
efecto de las vibraciones se bajo sobre los soportes.
Para el proceso de diseño, se realiza el modelado de las piezas en Autodesk Inventor 2018®.
Diseño de soporte de dinamómetro hidráulico
Este se compone por dos soportes tipo Ω sobre los que descansan las chumaceras en las que se
soporta el eje del freno. A su vez, estos soportes van fijados a una base tipo Ω de 820 mm de
longitud. La base tipo Ω más grande va fijada a la parte inferior de la mesa del Banco de Potencia
del laboratorio ML 032 por 4 tornillos en sus esquinas.
Las dimensiones de los elementos por separado se observan en los planos del Anexo C. Una de las
características primordiales de estos soportes es que, debido a sus dimensiones, permite elevar las
chumaceras 126 mm de la superficie de la base principal, y así, que el movimiento del freno no
quede restringido per se. Además del alto momento de inercia y rigidez del perfil tipo Ω.
Se determina que el soporte del dinamómetro es capaz de resistir las cargas del equipo, a la vez
que ese en general altamente rígido.
Diseño de soporte del motor
El soporte del motor se compone de dos partes, soporte A y B, los cuales al final van soportados
sobre dos perfiles rectangulares de 100mm x 50 mm. Los perfiles rectangulares van fijados a la
mesa del Banco de Potencia del laboratorio ML 032 por un tornillo a cada extremo de estos.
El soporte A es un perfil “L” al cual se sujeta la carcasa del motor. Y el soporte B es un perfil tipo
Ω al cual se fija el soporte A y el cual va fijado a los perfiles rectangulares.
Las dimensiones de los elementos que componen el soporte del motor se encuentran en los planos
del Anexo C. En estos se pueden evidenciar las características de mayor importancia en este
diseño, que son, primero, en el soporte A, el patrón de agujeros pasantes en la sección con el
agujero de 60 mm, en conjunto con la hendidura circular en la cara interna de esta sección, ayudan
a la buena sujeción del motor ME1117, o cualquier motor con una carcasa NEMA 143TC.
Segundo, las correderas presentes en el soporte B, las cuales facilitan el proceso de alineación del
eje del motor con el eje del dinamómetro. Tercero, la altura de 50 mm del soporte B, lo cual permite
una primera reducción de la desalineación paralela del eje del motor con respecto al del
dinamómetro, pero asegura que la altura del eje del motor no sea mayor. Y cuarto, la modularidad
del soporte en general, lo cual facilita el proceso de alineación y propende por una fácil
adaptabilidad del montaje a motores distintos al caso de estudio de este trabajo.
Se determina que todos los elementos que componen el soporte del motor son capaces de soportar
las cargas generadas por este, apagado y prendido.

16
Selección de acople entre eje de motor y eje de dinamómetro
Se realiza una investigación de las soluciones de acople entre los ejes. Las opciones optimas son,
acople de platillo o brida, acople de cadena, acople de piñones, acople de araña y acople
Omega®. Escogidas, sea por su favorecimiento de la eficiencia mecánica, absorción de
desalineamiento o absorción de vibraciones.
Es seleccionada la opción del acople araña, debido a que, primero, permite compensar un buen
nivel de desalineación paralela y angular entre los ejes. Segundo, ayuda a reducir los niveles de
vibración en el sistema, ya que la araña polimérica del acople absorbe la desalineación de los
ejes, a la vez que parte de las vibraciones. Y tercero, es asequible en comparación con otras
soluciones que proveen beneficios similares, como el acople Omega®.
El dimensionamiento del acople araña se hace acorde con la guía “Acoples flexibles de torsión
Interflex®” de Intermec. A partir de esto se la referencia GE28, cuyas características están en la
Característica Valor
Diámetro 65 mm
Torque nominal 841 lb in (95 N m)
Velocidad máxima 8500 RPM Tabla 10 Características de acople Interflex® GE28
Con el objetivo de reducir costos, se escoge el equivalente de este acople en la marca LoveJoy®.
Si bien el precio es menor, la calidad es muy similar; pero sobre todo, tiene la característica de
venir con sus caras externas rectificadas, y por ende, balanceado.
Las dos mitades del acople deben ser maquinadas para realizar los agujeros y cuñas para los ejes
y los agujeros para los prisioneros. Cabe resaltar, la selección y diseño de cuñas y cuñeros se
realiza para que la mitad de la cuña quede en el acople.
Característica Valor
Diámetro de agujero 22 mm
Lado de cuña cuadrada 3/16 in
Prisionero 1/8 in Tabla 11 Características de acople al motor
Característica Valor
Diámetro de agujero 19 mm
Lado de cuña cuadrada 1/4 in
Prisionero 3/16 in Tabla 12 Características de acople al dinamómetro
17
4.4 Diseño de interfaz para control de nivel de acelerador Con el objetivo de poder tener un nivel de acelerador constante y controlado durante cada uno de
los intentos de las pruebas, se realiza el diseño de un sistema electrónico para tal propósito.
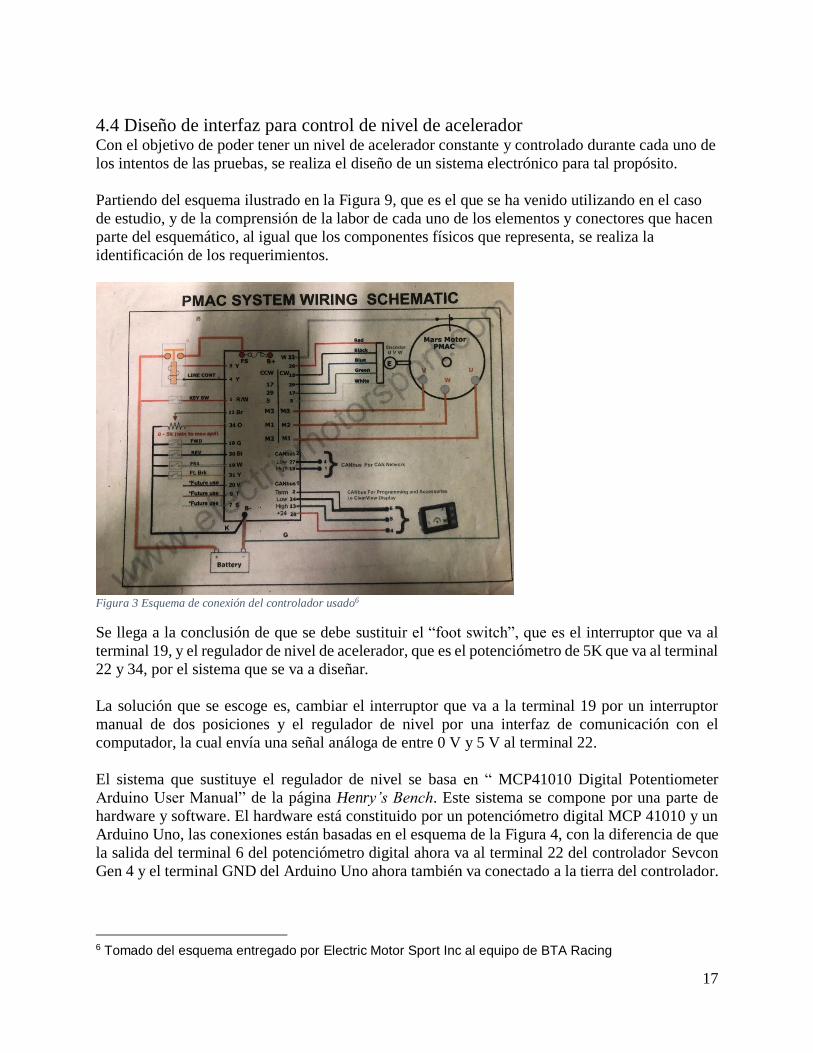
Partiendo del esquema ilustrado en la Figura 9, que es el que se ha venido utilizando en el caso
de estudio, y de la comprensión de la labor de cada uno de los elementos y conectores que hacen
parte del esquemático, al igual que los componentes físicos que representa, se realiza la
identificación de los requerimientos.
Figura 3 Esquema de conexión del controlador usado6
Se llega a la conclusión de que se debe sustituir el “foot switch”, que es el interruptor que va al
terminal 19, y el regulador de nivel de acelerador, que es el potenciómetro de 5K que va al terminal
22 y 34, por el sistema que se va a diseñar.
La solución que se escoge es, cambiar el interruptor que va a la terminal 19 por un interruptor
manual de dos posiciones y el regulador de nivel por una interfaz de comunicación con el
computador, la cual envía una señal análoga de entre 0 V y 5 V al terminal 22.
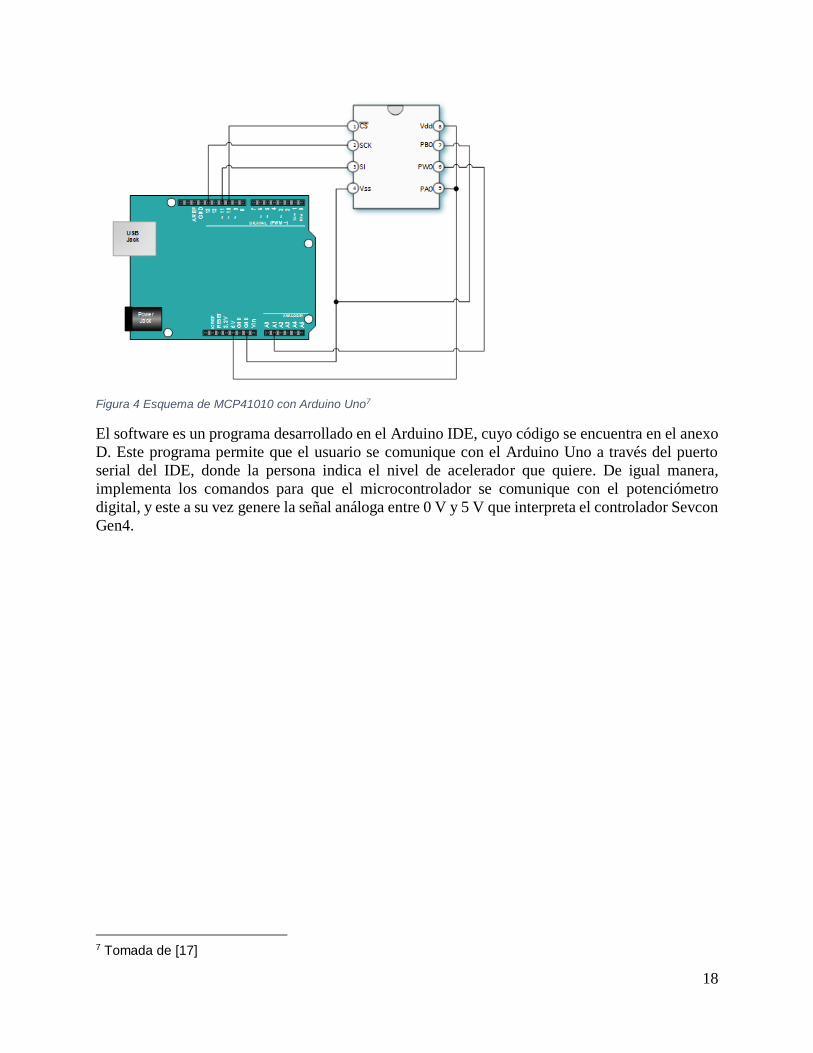
El sistema que sustituye el regulador de nivel se basa en “ MCP41010 Digital Potentiometer
Arduino User Manual” de la página Henry’s Bench. Este sistema se compone por una parte de
hardware y software. El hardware está constituido por un potenciómetro digital MCP 41010 y un
Arduino Uno, las conexiones están basadas en el esquema de la Figura 4, con la diferencia de que
la salida del terminal 6 del potenciómetro digital ahora va al terminal 22 del controlador Sevcon
Gen 4 y el terminal GND del Arduino Uno ahora también va conectado a la tierra del controlador.
6 Tomado del esquema entregado por Electric Motor Sport Inc al equipo de BTA Racing
18
Figura 4 Esquema de MCP41010 con Arduino Uno7
El software es un programa desarrollado en el Arduino IDE, cuyo código se encuentra en el anexo
D. Este programa permite que el usuario se comunique con el Arduino Uno a través del puerto
serial del IDE, donde la persona indica el nivel de acelerador que quiere. De igual manera,
implementa los comandos para que el microcontrolador se comunique con el potenciómetro
digital, y este a su vez genere la señal análoga entre 0 V y 5 V que interpreta el controlador Sevcon
Gen4.
7 Tomada de [17]
19
5. Resultados
5.1 Procedimiento de ensamble
Paso 1: Montaje de freno hidráulico
Piezas:
• Dinamómetro hidráulico con eje y chumaceras
• Omega grande
• Soporte para chumaceras tipo A
• Soporte chumaceras tipo B
• Tornillo M8 x 15 mm con tuerca (X 4)
• Tornillo M12 x 25 mm con tuerca (X 12)
Proceso:
1. Se deja descansar la omega grande sobre la parte inferior de la mesa, de manera que las
superficies horizontales inferiores se depositen sobre los perfiles longitudinales de la mesa.
2. Se alinean los agujeros en las esquinas del soporte con los que se encuentran al inicio y final
de cada uno de los tramos de los perfiles longitudinales de la mesa.
3. Se sujeta la omega grande a los perfiles de la mesa usando los tornillos M8x15 y sus respectivas
tuercas. Las tuercas se aprietan hasta el par torsional que cómodamente se puede lograr con
una llave fija M8.
4. Se ubica el soporte para chumacera tipo A sobre la superficie horizontal superior de la omega
grande, teniendo en cuenta que los agujeros de los lados inferiores del soporte queden alineados
con los que se encuentran en el lado de la omega que está más alejado del montaje del motor
y que son colineales con los cuatro que están al otro lado de la placa. Adicional, la dirección
del soporte es aquella en que el par de agujero de la placa horizontal superior queden hacia el
montaje del motor.
5. Se sujeta el soporte de chumacera tipo A a la omega grande usando dos tornillos M12 con sus
tuercas (un tornillo para cada agujero). Las tuercas se aprietan hasta el par torsional que
cómodamente se puede lograr con una llave fija M12.
6. Se ubica el soporte para chumacera tipo B sobre la superficie horizontal superior de la omega
grande, teniendo en cuenta que los cuatro agujeros de los lados inferiores del soporte queden
alineados con los cuatro agujeros de la omega grande que quedan más cerca de donde irá
montaje del motor.
7. Se sujeta el soporte de chumacera tipo B a la omega grande usando cuatro tornillos M12 con
sus tuercas (un tornillo para cada agujero). Las tuercas se aprietan hasta el par torsional que
cómodamente se puede lograr con una llave fija M12.
8. Se mueve el dinamómetro hidráulico y deja descansando sobre los soportes para chumaceras.
De manera que la chumacera más cercana al freno (es decir, la que soporte la entrada de agua)
quede sobre el soporte tipo A y las dos que están sobre el eje del freno queden sobre el soporte
tipo B.
9. Se alinean los agujeros de los lados de las chumaceras con los agujeros de las superficies
horizontales superiores de los soportes para chumaceras.
20
10. Se sujetan las chumaceras a los soportes usando seis tornillos M12 con sus tuercas (un tornillo
para cada agujero). Las tuercas se aprietan hasta el par torsional que cómodamente se puede
lograr con una llave fija M12.
11. Se pega un tramo de cinta reflectiva de 10 mm en la dirección tangencial del eje, en un punto
entre las dos chumaceras que los soportan.
Paso 2: Montaje de celda de carga
Piezas:
• Celda de carga
• Tornillo M8 x 10 mm
• Tornillo M8 con tuerca soldada a la cabeza
• Argolla metálica
Proceso:
1. Se rota el dinamómetro hasta que la salida de agua quede en el cuadrante inferior derecho
(viendo el dinamómetro por la cara de la entrada del agua).
2. El tornillo M8 con tuerca soldada a la cabeza se sujeta al agujero roscado superior de la celda
de carga.
3. Se introduce la argolla metálica en el agujero del brazo del freno.
4. Se introduce el otro extremo de la argolla en el agujero de la tuerca del montaje de la celda de
carga.
5. Se alinea el agujero roscado inferior de la celda de carga con el agujero restante de la omega
grande.
6. Usando el tornillo M8x10 se sujeta la celda de carga a la omega grande. Para este proceso de
sujeción se introduce el tornillo desde debajo de la cara horizontal superior de la omega grande
hacia arriba, de manera que el tornillo quede roscado en la celda de carga. El tornillo se aprieta
hasta el par torsional que cómodamente se puede lograr con una llave fija M8.
Paso 3: Montaje de perfiles rectangulares para motor
Piezas:
• Perfil rectangular 100mm x 50 mm x 1m con agujeros (X2)
• Tornillos M12 con tuerca (X 4)
Proceso:
1. Se ubican los perfiles rectangulares sobre la parte inferior de la mesa, de manera que los
extremos del perfil descansen sobre los perfiles longitudinales de la mesa y que la cara con los
agujeros de mayor separación quede en contacto con los perfiles longitudinales. En este
proceso, los agujeros de la superficie y perfil deben quedar alineados y una cara larga de cada
uno de los perfiles mirando hacia el montaje del freno.
2. Se fijan los perfiles rectangulares a los perfiles de la mesa, usando los cuatro tornillos M12 con
sus tuercas (un tornillo para cada agujero alineado). Las tuercas se aprietan hasta el par
torsional que cómodamente se puede lograr con una llave fija M12.
21
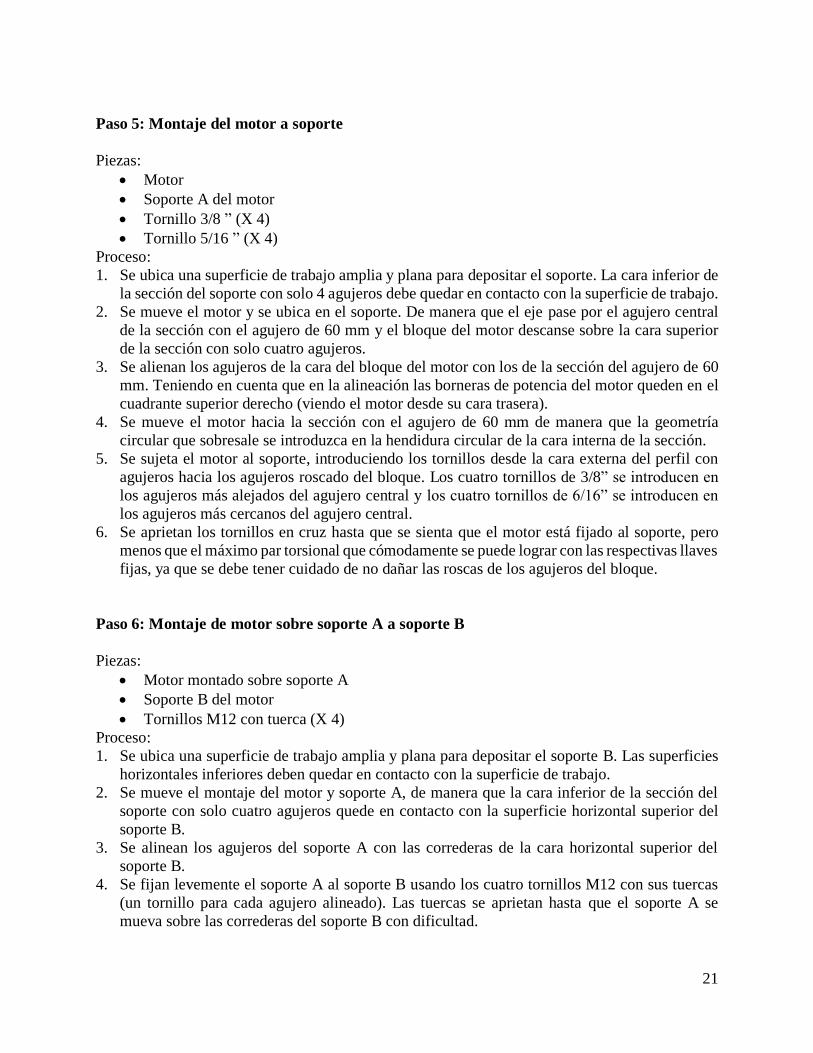
Paso 5: Montaje del motor a soporte
Piezas:
• Motor
• Soporte A del motor
• Tornillo 3/8 ” (X 4)
• Tornillo 5/16 ” (X 4)
Proceso:
1. Se ubica una superficie de trabajo amplia y plana para depositar el soporte. La cara inferior de
la sección del soporte con solo 4 agujeros debe quedar en contacto con la superficie de trabajo.
2. Se mueve el motor y se ubica en el soporte. De manera que el eje pase por el agujero central
de la sección con el agujero de 60 mm y el bloque del motor descanse sobre la cara superior
de la sección con solo cuatro agujeros.
3. Se alienan los agujeros de la cara del bloque del motor con los de la sección del agujero de 60
mm. Teniendo en cuenta que en la alineación las borneras de potencia del motor queden en el
cuadrante superior derecho (viendo el motor desde su cara trasera).
4. Se mueve el motor hacia la sección con el agujero de 60 mm de manera que la geometría
circular que sobresale se introduzca en la hendidura circular de la cara interna de la sección.
5. Se sujeta el motor al soporte, introduciendo los tornillos desde la cara externa del perfil con
agujeros hacia los agujeros roscado del bloque. Los cuatro tornillos de 3/8” se introducen en
los agujeros más alejados del agujero central y los cuatro tornillos de 6/16” se introducen en
los agujeros más cercanos del agujero central.
6. Se aprietan los tornillos en cruz hasta que se sienta que el motor está fijado al soporte, pero
menos que el máximo par torsional que cómodamente se puede lograr con las respectivas llaves
fijas, ya que se debe tener cuidado de no dañar las roscas de los agujeros del bloque.
Paso 6: Montaje de motor sobre soporte A a soporte B
Piezas:
• Motor montado sobre soporte A
• Soporte B del motor
• Tornillos M12 con tuerca (X 4)
Proceso:
1. Se ubica una superficie de trabajo amplia y plana para depositar el soporte B. Las superficies
horizontales inferiores deben quedar en contacto con la superficie de trabajo.
2. Se mueve el montaje del motor y soporte A, de manera que la cara inferior de la sección del
soporte con solo cuatro agujeros quede en contacto con la superficie horizontal superior del
soporte B.
3. Se alinean los agujeros del soporte A con las correderas de la cara horizontal superior del
soporte B.
4. Se fijan levemente el soporte A al soporte B usando los cuatro tornillos M12 con sus tuercas
(un tornillo para cada agujero alineado). Las tuercas se aprietan hasta que el soporte A se
mueva sobre las correderas del soporte B con dificultad.
22
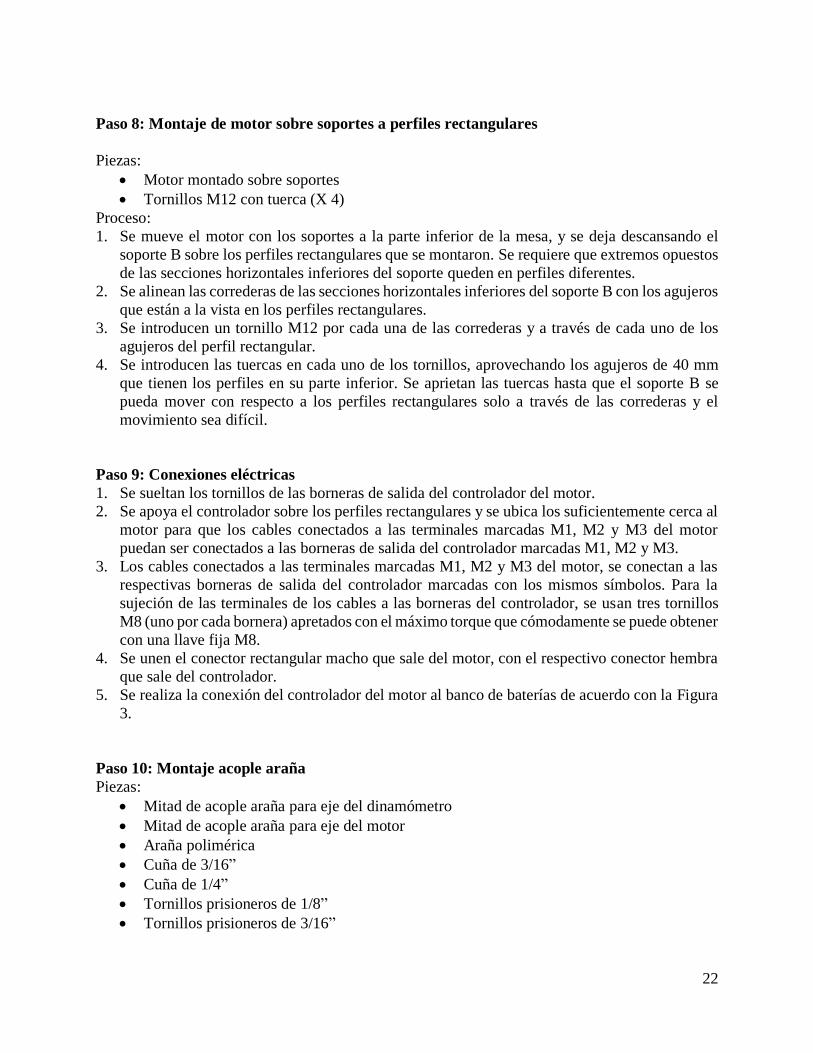
Paso 8: Montaje de motor sobre soportes a perfiles rectangulares
Piezas:
• Motor montado sobre soportes
• Tornillos M12 con tuerca (X 4)
Proceso:
1. Se mueve el motor con los soportes a la parte inferior de la mesa, y se deja descansando el
soporte B sobre los perfiles rectangulares que se montaron. Se requiere que extremos opuestos
de las secciones horizontales inferiores del soporte queden en perfiles diferentes.
2. Se alinean las correderas de las secciones horizontales inferiores del soporte B con los agujeros
que están a la vista en los perfiles rectangulares.
3. Se introducen un tornillo M12 por cada una de las correderas y a través de cada uno de los
agujeros del perfil rectangular.
4. Se introducen las tuercas en cada uno de los tornillos, aprovechando los agujeros de 40 mm
que tienen los perfiles en su parte inferior. Se aprietan las tuercas hasta que el soporte B se
pueda mover con respecto a los perfiles rectangulares solo a través de las correderas y el
movimiento sea difícil.
Paso 9: Conexiones eléctricas
1. Se sueltan los tornillos de las borneras de salida del controlador del motor.
2. Se apoya el controlador sobre los perfiles rectangulares y se ubica los suficientemente cerca al
motor para que los cables conectados a las terminales marcadas M1, M2 y M3 del motor
puedan ser conectados a las borneras de salida del controlador marcadas M1, M2 y M3.
3. Los cables conectados a las terminales marcadas M1, M2 y M3 del motor, se conectan a las
respectivas borneras de salida del controlador marcadas con los mismos símbolos. Para la
sujeción de las terminales de los cables a las borneras del controlador, se usan tres tornillos
M8 (uno por cada bornera) apretados con el máximo torque que cómodamente se puede obtener
con una llave fija M8.
4. Se unen el conector rectangular macho que sale del motor, con el respectivo conector hembra
que sale del controlador.
5. Se realiza la conexión del controlador del motor al banco de baterías de acuerdo con la Figura
3.
Paso 10: Montaje acople araña
Piezas:
• Mitad de acople araña para eje del dinamómetro
• Mitad de acople araña para eje del motor
• Araña polimérica
• Cuña de 3/16”
• Cuña de 1/4”
• Tornillos prisioneros de 1/8”
• Tornillos prisioneros de 3/16”
23
Proceso:
1. Se separa los ejes del dinamómetro y motor lo máximo que permite el montaje armado,
aprovechando las correderas del soporte del motor.
2. Se toma la mitad del acople araña del dinamómetro y se le introduce la cuña de 1/4” en el
cuñero interno.
3. Se introduce la mitad del acople araña del dinamómetro en el eje del dinamómetro, hasta que
la cara frontal del eje quede a ras con el final del agujero. Teniendo cuidado de que la cuña
quede introducida en el cuñero del eje.
3. Se introduce el prisionero 3/16” en el agujero roscado de la mitad del acople araña del
dinamómetro y se aprieta hasta el par torsional que cómodamente se puede lograr con una llave
Allen de 3/16”.
4. Se toma la mitad del acople araña del motor y se le introduce la cuña de 3/16” en el cuñero
interno.
5. Se introduce la mitad del acople araña del motor en el eje del motor, hasta que la cara frontal
del eje quede a ras con el final del agujero. Teniendo cuidado de que la cuña quede introducida
en el cuñero del eje.
6. Se introduce el prisionero 1/8” en el agujero roscado de la mitad del acople araña del motor y
se aprieta hasta el par torsional que cómodamente se puede lograr con una llave Allen de 1/8”.
7. Se introduce la araña polimérica en la mitad del acople del dinamómetro.
8. Se realiza la alineación de los ejes.
9. Se acercan los ejes de manera que queden acoplados.
Paso 11: Conexiones hidráulicas
Proceso:
1. Se realiza la conexión de la manguera de entrada del dinamómetro hidráulico a una línea de
agua .
2. Se direcciona la salida de la manguera de salida del dinamómetro hidráulico a un desagüe.
5.2 Procedimiento de alineación de ejes Se realiza una investigación de los distintos equipos y métodos para realizar la alineación de los
ejes del dinamómetro y motor. Se encuentran, por un lado, una serie de métodos sofisticados y de
alta precisión, pero también alto costo de implementación y requerimiento de buen nivel de
conocimiento técnico para su uso, como alineación por láser y medición de vibración. Por otro
lado, métodos menos sofisticados y precisos, pero de fácil y económica implementación, como
alineación básica y alineación con comparador de caratula.
Considerando las restricciones de tiempo, presupuesto y espacio, se opta por una alineación básica.
Adicionalmente, al utilizarse un acople araña para realizar la transmisión de potencia, esto permite
tener cierto nivel de desalineación paralela y angular sin que haya problemas de vibración.
Los pasos que seguir para realizar el proceso son enunciados en esta sección.

24
Previo al inicio del proceso, las mitades del acople araña deben estar montadas sobre el eje del
dinamómetro y motor y la araña polimérica montada sobre la mitad del dinamómetro.
Proceso:
1. Se rotan los ejes, de manera que quede uno de los dientes de cada una de las mitades del acople
en la posición de 12 horas.
2. Se acercan los ejes (moviendo el motor) hasta que la separación entre dientes de las mitades
sea del orden de 1 mm.
3. Se mide la desalineación paralela vertical inicial. Para hacer esto se coloca plana una regla en
la parte superior de la mitad del acople del dinamómetro y se mide la distancia entre la parte
inferior de la regla y la superficie superior de la mitad del acople del motor.
4. Si la desalineación paralela vertical es mayor a 5 mm, se deben introducir calzas (o un conjunto
de calzas) con un espesor cercano pero menor a la desalineación, en los cuatro tornillos que
sujetan el soporte B del motor a los perfiles rectangulares, de manera que el motor se eleve por
el valor del espesor de las calzas.
5. Se mide y registra la desalineación paralela vertical. Para hacer esto se coloca plana una regla
en la parte superior de la mitad del acople del dinamómetro y se mide la distancia entre la parte
inferior de la regla y la superficie superior de la mitad del acople del motor. Se toma como
estándar que la desalineación es negativa si el eje del motor está más abajo y positiva si el eje
está más arriba.
6. Se mide desalineación angular vertical. Para hacer esto, se mide con galgas de espesor la
separación entre los dientes que están en la posición de 12 horas. Luego, se rotan los ejes para
que los dientes que estaban en la posición de 12 horas queden en la posición de 6 horas. Se
mide con galgas de espesor la separación de los dientes que ahora están en la posición de 6
horas.
7. Se resta al valor medido en la posición de 12 horas, el valor en la posición de 6 horas. Esto da
una indicación de la dirección y magnitud de la desalineación angular vertical, aunque no da
su valor en grados.
8. Para corregir la desalineación vertical se agregan o retiran calzas de los tornillos que sujetan
el soporte B del motor de acuerdo con las siguientes formulas:
𝐴𝑔𝑟𝑒𝑔𝑎𝑟 𝑎 𝑡𝑜𝑟𝑛𝑖𝑙𝑙𝑜𝑠:𝐴 × 𝐵
𝐻− 𝑃
[12]
Donde, 𝐴, 𝑃, 𝐵 y 𝐻 son los valores de, respectivamente, el indicador de desalineación angular, el
indicador de desalineación paralela, distancia del tornillo a la superficie de la mitad del acople y
el diámetro del acople.
9. Se repiten los pasos 5 al 8 hasta obtener una diferencia menor a 0.1 mm entre las separaciones
a las 12 horas y 6 horas o hasta cuando no se pueda lograr mejores en la alineación entre una
y otra repetición.
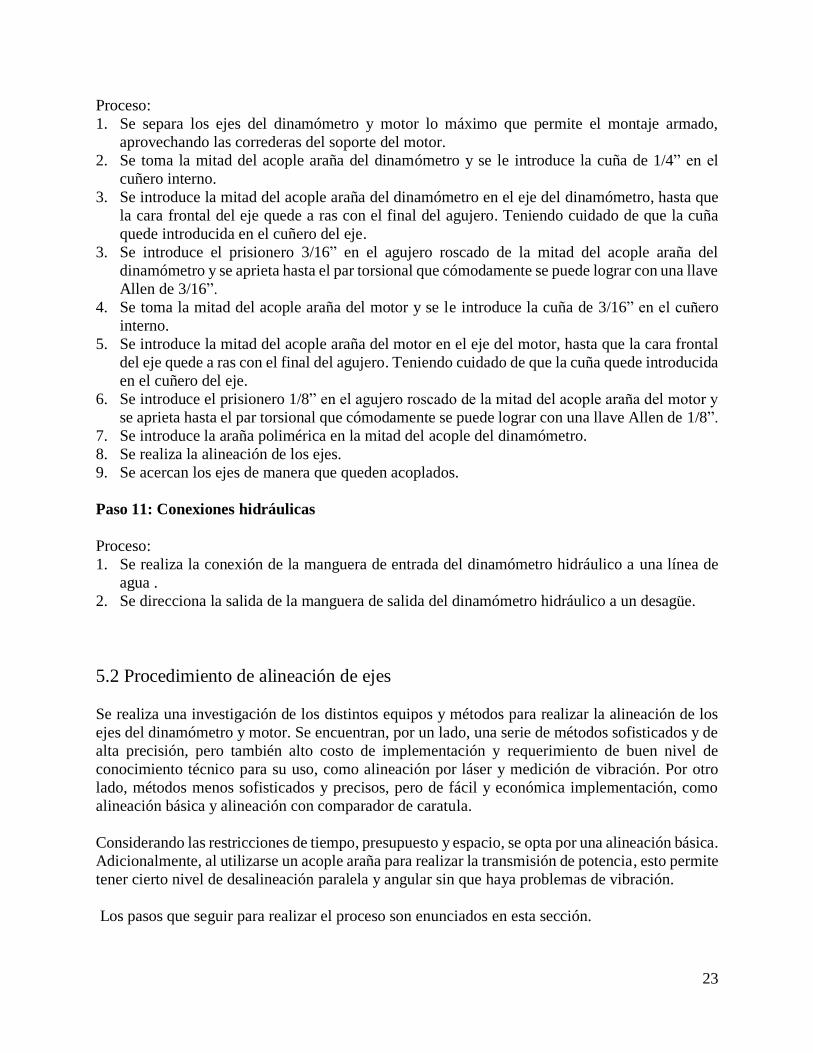
10. Se mide la desalineación paralela vertical.
11. Se agregan o retiran calzas de los tornillos que sujetan el soporte B del motor a los perfiles
rectangulares de acuerdo con la Tabla 13.
25
Paralela
Positiva Agregar a todos los tornillos
una o más calzas cuyo espesor
sume el valor de la
desalineación vertical.
Negativa Retirar a todos los tornillos
una o más calzas cuyo espesor
sume el valor de la
desalineación vertical. Tabla 13 Procedimiento de corrección de desalineación vertical paralela
12. Se repiten los pasos 10 y 11 hasta obtener una desalineación paralela menor a 1 mm o cuando
no se logre mejoras en la corrección entre un intento y otro.
13. Se mide la desalineación paralela horizontal. Para hacer esto se coloca plana una regla en la
parte izquierda de la mitad del acople del dinamómetro y se mide la distancia entre la parte
inferior de la regla y la superficie izquierda de la mitad del acople del motor. Se toma como
estándar que la desalineación es positiva si el eje del motor está más a la derecha y negativa si
el eje está más a la izquierda.
14. Se mueve el soporte B del motor hacia la derecha o izquierda con respecto a los soportes
rectangulares, tomando como base la Tabla 14.
Desalineación paralela
Positiva Mover el soporte hacia la
izquierda.
Negativa Mover el soporte hacia la
derecha. Tabla 14 Procedimiento de corrección de desalineación horizontal paralela
15. Se repiten los pasos 14 y 15 hasta obtener una desalineación paralela menor a 1 mm o cuando
no se logre mejoras en la corrección entre un intento y otro.
5.3 Protocolo de pruebas A partir de la investigación normativa, y considerando los equipos seleccionados para las
mediciones y aplicación de carga, se establece un protocolo para la realización de las pruebas. Por
ende, este procedimiento integra los lineamientos sacados de la investigación, los intereses del
proyecto y las restricciones de los equipos que constituyen el banco de pruebas.
Como parte de las consideraciones, se toma los procedimientos de uso del dinamómetro sugeridos
por [9] y [10].
26
Si bien este protocolo está altamente enfocado en el caso de estudio del tren de potencia del kart
eléctrico, se podría fácilmente adaptar para la caracterización de otro tren de potencia, inclusive,
con instrumentación distinta a la seleccionada en este proyecto.
Procedimiento de planeación previo a pruebas:
1. Se establece la velocidad angular y par torsional mínimo y máximo de interés en las pruebas.
Par este caso, se determina:
𝜔𝑚𝑖𝑛 = 800 𝑅𝑃𝑀 𝜔𝑚𝑎𝑥 = 5000 𝑅𝑃𝑀
𝜏𝑚𝑖𝑛 = 0 𝑁 𝑚 𝜏𝑚𝑎𝑥 = 35 𝑁 𝑚
2. Se establece el número de puntos intermedios de velocidad angular y par torsional. El número
se establece en 10 puntos intermedios tanto para velocidad angular, como para par torsional.
Por ende:
∆𝜔 = 500 𝑅𝑃𝑀
∆𝜏 = 3.5 𝑁 m
Por consiguiente, el motor inicialmente se prueba en los 100 puntos que resultan de la
combinación de las velocidades y pares torsionales a auditar.
3. Para realizar el barrido de los puntos de prueba se establecen los niveles de acelerador de las
repeticiones. Se determina que se van a tener niveles de aceleración de 100%, 90%, 80%, 70%,
60%, 50%, 40%, 30%, 20% y 10%. Se asegura el sostenimiento de los niveles con la señal de
la interfaz entre el usuario y el controlador Sevcon G4 diseñada en este proyecto.
Procedimiento revisión antes pruebas:
Antes, durante y después del montaje del banco se debe hacer una inspección visual del motor, en
busca de conexiones en mala condición, golpes o daños que pudieran indicar que el motor no está
en buena condición.
Adicional, se debe realizar una revisión del motor en movimiento. Se recomienda realizar entre
los pasos 9 y 10 del procedimiento de ensamblaje.
1. Revisar que el motor este desacoplado del dinamómetro y sin el acople montado en el eje.
2. Se realiza una revisión del esquema de conexiones entre, el banco de baterías, controlador del
motor y motor. Adicionalmente, la conexión de la interfaz de comunicación para el control del
nivel de acelerador, con el controlador del motor.
3. Se pega un tramo de cinta reflectiva de 10 mm en la dirección tangencial del eje del motor, a
una separación de por lo menos 1 cm de la cara externa del soporte A del motor.
4. Se coloca el nivel de acelerador en la interfaz de comunicación en un nivel de 0%.
5. Se coloca el botón de dirección del controlador en “Verde”. Y el interruptor que remplaza el
“Foot Switch” en “ON”.
6. Se inicia el sistema de adquisición de datos.
7. A través de la interfaz de comunicación se coloca el nivel del acelerador en 100%.
27
8. Se toma el tacómetro óptico y se apunta el láser hacia la cinta reflectiva en el eje del motor. Se
espera a que la velocidad del eje se estabilice y se registra tres de las velocidades reportadas
por el tacómetro.
9. Con la opción de medición de temperatura del tacómetro se mide la temperatura del bloque del
motor. Si la temperatura está por encima de 30°C debe pararse la prueba y anotar que hay
problemas.
10. A través de la interfaz de comunicación se coloca el nivel del acelerador en 0%.
11. El interruptor que remplaza el “Foot Switch” se coloca en “OFF”. Y el botón de dirección del
controlador en “Neutro”.
12. Se para el sistema de adquisición de datos.
13. Se dan 5 min de reposo al sistema.
14. Se repiten los pasos 5 al 13 pero ahora en cada una de las repeticiones disminuyendo el nivel
del acelerado en 10%, hasta que se realice la repetición con nivel de acelerador de 20%.
15. Terminada la prueba a 20% se apaga el controlador.
16. Posterior a las pruebas se deben revisar los valores reportados por cada una de las variables,
excepto torque el cual no se mide en esta prueba y se asume 0 N m, y observar si los valores
están dentro de lo esperado.
Variable Valor esperado
Velocidad angular 3000±100 RPM
Voltaje 48 V – 53 V
Corriente 0 A - 10 A
Temperatura de bloque 15 °C - 30°C Tabla 15 Valores esperados en pruebas sin carga
Si los valores en estado estable de las variables son mayores a los esperados, se debe realizar una
revisión por posibles daños en el motor, previo a la realización de las pruebas.
Procedimiento durante pruebas:
1. Se realiza una revisión del esquema de conexiones entre, el banco de baterías, controlador del
motor y motor. Adicionalmente, la conexión de la interfaz de comunicación para el control del
nivel de acelerador, con el controlador del motor.
2. Se conecta el multímetro a los terminales del banco de baterías.
3. Se coloca un ventilador de pie apuntando hacia la cara trasera del motor.
4. Se prende el ventilador y se coloca en el máximo nivel de flujo de aire.
5. Se coloca el nivel de acelerador en la interfaz de comunicación en un nivel de 0%.
6. Se abre la válvula de entrada y salida del dinamómetro hidráulico, y se permite el flujo de agua
por aproximadamente 1 min.
7. Se cierra la válvula de entrada del dinamómetro.
8. Se coloca el botón de dirección del controlador en “Verde”. Y el interruptor que remplaza el
“Foot Switch” en “ON”.
9. Se inicia el sistema de adquisición de datos.
10. A través de la interfaz de comunicación se coloca el nivel del acelerador en 100%.
28
11. Se toma el tacómetro óptico y se apunta el láser hacia la cinta reflectiva en el eje del
dinamómetro. Se espera a que la velocidad del eje se estabilice y se registra tres de las
velocidades reportadas por el tacómetro y tres de los voltajes reportados por el multímetro.
12. Con la opción de medición de temperatura del tacómetro óptico se mide la temperatura del
bloque del motor. Si el motor está por encima de 40°C, debe parar la prueba y revisar para
buscar el origen del problema de calentamiento.
13. Se abre la válvula de entrada del dinamómetro hasta que el eje baja a la próxima velocidad de
interés entre las seleccionadas previo a la prueba.
14. Se repiten los pasos 11 al 13 hasta que se realicen con la velocidad de 800 RPM.
15. A través de la interfaz de comunicación se coloca el nivel del acelerador en 0%.
16. El interruptor que remplaza el “Foot Switch” se coloca en “OFF”. Y el botón de dirección del
controlador en “Neutro”.
17. Se para el sistema de adquisición de datos.
18. Con el tacómetro óptico se mide la temperatura del bloque del motor. Si el motor está por
encima de 40°C, debe revisarse para buscar el origen del problema de calentamiento.
19. Si se está usando un banco de baterías para alimentar el sistema, se debe revisar el nivel de
carga de cada una de las celdas. Si el voltaje de alguna de ellas es menor al recomendado por
el fabricante, se deben cargar las baterías antes de continuar con las pruebas.
20. Se dan 5 min de reposo al sistema. O en general hasta que el bloque llegue a una temperatura
del alrededor de 21 °C.
21. Se repiten los pasos 6 al 20 pero ahora en cada una de las repeticiones disminuyendo el nivel
del acelerado en 20%, hasta que se realice la repetición con nivel de acelerador de 10%.
22. Terminada la prueba con nivel de acelerador de 20 % (es decir, luego de ejecutar el paso 12),
se apaga el controlador.
23. Se cierra la válvula de entrada del dinamómetro.
24. Se apaga el ventilador
Nota 1: El criterio de estabilidad ha usar es que la velocidad angular varíe menos de ±50 RPM en
los últimos 10 s.
Nota 2: Si se genera sobrecalentamiento en las pruebas de entre 80% y 90% de acelerador poder
ser a causa de refrigeración deficiente. Esto se puede corregir aumentado el flujo de aire al motor,
y de no ser posible, omitiendo estos valores. Pero si el sobrecalentamiento se genera con nivel de
acelerador menor a 80%, se debe revisar posibles daños en el motor.
Nota 3: Durante las pruebas a nivel de acelerador mayor a 80% se debe hacer una constante
revisión del nivel de carga de las baterías. Ya que al ser pruebas durante las cuales el motor pide
una gran cantidad de potencia eléctrica, a la vez que toma un periodo considerable en estabilizar
su velocidad, hay peligro de que las baterías se descarguen hasta niveles dañinos.
Procedimiento posterior a las pruebas:
1. Se grafican los datos de las variables medidas en el primer intento (nivel de acelerado de
100%).
2. A partir de las gráficas se determina los valores de par torsional y corriente para cada uno de
los niveles de carga. Se logra esto, al observar los cambios grandes e instantáneos de las
variables en distintos tiempos.
29
3. Se calcula el valor promedio de las variables para cada nivel de carga. El de par torsional y
corriente , a partir de los datos del sistema de adquisición y el de velocidad angular y voltaje,
a partir de las medidas tomadas con el tacómetro óptico y multímetro.
4. Los valores promedio de par torsional, velocidad angular, voltaje y corriente para cada nivel
de carga son organizados en una tabla de la forma:
Nivel de
carga Par_torsional Velocidad_angular Voltaje Corriente
1 tau omega v i
2 tau omega v i
n tau omega v i
5. La tabla se exporta a formato csv y se guarda como “Intento_1.csv”. Y se obtiene un archivo
de texto de la forma:
Nivel de carga,Par_torsional,Velocidad_angular,Voltaje,Corriente
1,tau,omega,v,i
2,tau,omega,v,i
n,tau,omega,v,i
6. Se repiten los pasos 1 al 5 con los datos medidos en los demás intentos y cambiando el número
que acompaña el título del archivo csv. Obteniendo al final 10 archivos csv, con títulos
acompañados por número del 1 al 10.
7. Se toma el código de Python, detallado en la próxima sección, y se le modifica la dirección
donde están los archivos csv.
8. Se corre el código de Python y se obtienen las gráficas, 𝜏 vs 𝜔, 𝑃𝑚 vs 𝜔, P𝐸 vs 𝜏 vs 𝜔, η𝑚 vs
𝜏 vs 𝜔 y las curvas de eficiencia
5.4 Código de Python para post-procesamiento de datos Se desarrolla un programa en Python, cuyo código se encuentra en el anexo E, el cual da como
resultado las gráficas de 𝜏 vs 𝜔, 𝑃𝑚 vs 𝜔, 𝑃𝐸 vs 𝜏 vs 𝜔, η𝑚 vs 𝜏 vs 𝜔 y el mapa de eficiencias.
Como se observa en el anexo E, este código comienza por la extracción y organización de los datos
de los archivos csv, entre ello, convirtiendo los datos de velocidad angular de RPM a 𝑟𝑎𝑑
𝑠. Luego,
calcula los valores de 𝑃𝑚, 𝑃𝐸 y η𝑚 usando los datos extraídos. Partiendo de lo anterior construye
las gráficas de 𝜏 vs 𝜔, 𝑃𝑚 vs 𝜔, 𝑃𝐸 vs 𝜏 vs 𝜔, η𝑚 vs 𝜏 vs 𝜔.
Para la construcción del mapa de eficiencias, se comienza por generar las coordenadas para una
malla de puntos entre el máximo y mínimo valor obtenido en torque y velocidad angular. A partir
de los datos que se tienen de las pruebas, se realiza una interpolación de η𝑚 para los puntos de la
malla que se construyó. Usando los valores obtenidos de la interpolación se genera una gráfica de
contornos y áreas coloreadas, los cuales representan el mapa de eficiencias del tren de potencia.

30
Este método es de gran utilidad, no solo porque facilita el proceso de graficado, sino porque el
proceso de interpolación en la última fase permite la construcción de mapas de eficiencia aun
cuando se tienen tomas de datos limitadas y las cuales por si solas no hubieran podido permitir
generar este tipo de gráfica. Además, generar la cantidad de puntos que se requieren para un buen
mapa de eficiencias, es una labor bastante complicada con los recursos disponibles y escogidos en
este trabajo.
5.5 Validación Partiendo del protocolo de pruebas enunciado y utilizando el banco de pruebas diseñado y
construido, al igual que las demás herramientas asociadas desarrolladas en este trabajo, se realizan
una serie de pruebas de rendimiento sobre el tren de potencia del kart eléctrico del departamento.
Figura 5 Montaje con el tren de potencia del kart eléctrico
Las características del motor y controlador que componen el tren de potencia se encuentran
consignadas en la Tabla 16 y Tabla 17.

31
Variable Valor
Potencia nominal 6 HP (4.5 kW)
Torque máximo 38 N m @ 0 RPM
Velocidad angular máxima 5000 RPM
Corriente máxima 300 A
Masa 10 kg Tabla 16 Características del motor Motenergy ME1117
Variable Valor
Voltaje de entrada 25.2 V – 57.6 V
Corriente máxima de salida 275 A* Tabla 17 Características del controlador Sevcon Gen4 Size4 8
* Pero por temas de seguridad el fusible de entrada está marcado a 250 A. Por ende, es menos.
Los resultados de estas pruebas, las cuales se constituyeron por ensayos sin carga a niveles de
acelerador entre 10 % y 90 % y con carga a niveles de 50 %, 60 % y 80 %, se sintetizan en la
Figura 6. La imagen presentada ilustra la eficiencia del tren de potencia para las distintas
condiciones de trabajo, y es a partir de estos datos que se realiza la interpolación en un rango de
velocidades angulares y pares torsionales más amplio. El resultado de esta interpolación se
encuentra registrada en la Figura 7. Adicionalmente, el programa de Python desarrollado generó
las gráficas de 𝜏 vs 𝜔, 𝑃𝑚 vs 𝜔 y 𝑃𝐸 vs 𝜏 vs 𝜔, las cuales se omitieron al ser poco claras debido a
la limitación en el número de datos registrados en los ensayos con carga.
Figura 6 Resultados de pruebas de mapeo sobre el tren de potencia del kart
8 Tomado de [16]
32
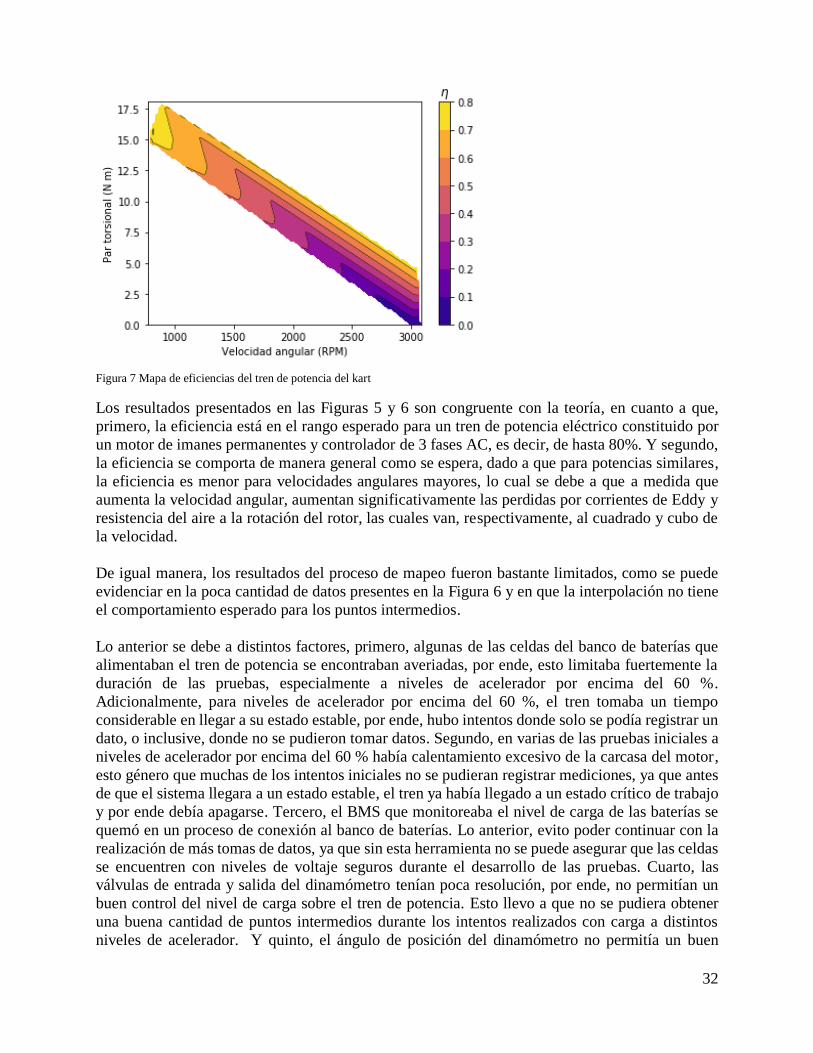
Figura 7 Mapa de eficiencias del tren de potencia del kart
Los resultados presentados en las Figuras 5 y 6 son congruente con la teoría, en cuanto a que,
primero, la eficiencia está en el rango esperado para un tren de potencia eléctrico constituido por
un motor de imanes permanentes y controlador de 3 fases AC, es decir, de hasta 80%. Y segundo,
la eficiencia se comporta de manera general como se espera, dado a que para potencias similares,
la eficiencia es menor para velocidades angulares mayores, lo cual se debe a que a medida que
aumenta la velocidad angular, aumentan significativamente las perdidas por corrientes de Eddy y
resistencia del aire a la rotación del rotor, las cuales van, respectivamente, al cuadrado y cubo de
la velocidad.
De igual manera, los resultados del proceso de mapeo fueron bastante limitados, como se puede
evidenciar en la poca cantidad de datos presentes en la Figura 6 y en que la interpolación no tiene
el comportamiento esperado para los puntos intermedios.
Lo anterior se debe a distintos factores, primero, algunas de las celdas del banco de baterías que
alimentaban el tren de potencia se encontraban averiadas, por ende, esto limitaba fuertemente la
duración de las pruebas, especialmente a niveles de acelerador por encima del 60 %.
Adicionalmente, para niveles de acelerador por encima del 60 %, el tren tomaba un tiempo
considerable en llegar a su estado estable, por ende, hubo intentos donde solo se podía registrar un
dato, o inclusive, donde no se pudieron tomar datos. Segundo, en varias de las pruebas iniciales a
niveles de acelerador por encima del 60 % había calentamiento excesivo de la carcasa del motor,
esto género que muchas de los intentos iniciales no se pudieran registrar mediciones, ya que antes
de que el sistema llegara a un estado estable, el tren ya había llegado a un estado crítico de trabajo
y por ende debía apagarse. Tercero, el BMS que monitoreaba el nivel de carga de las baterías se
quemó en un proceso de conexión al banco de baterías. Lo anterior, evito poder continuar con la
realización de más tomas de datos, ya que sin esta herramienta no se puede asegurar que las celdas
se encuentren con niveles de voltaje seguros durante el desarrollo de las pruebas. Cuarto, las válvulas de entrada y salida del dinamómetro tenían poca resolución, por ende, no permitían un
buen control del nivel de carga sobre el tren de potencia. Esto llevo a que no se pudiera obtener
una buena cantidad de puntos intermedios durante los intentos realizados con carga a distintos
niveles de acelerador. Y quinto, el ángulo de posición del dinamómetro no permitía un buen
33
desagua del equipo, por ende, aun cuando la válvula de entrada se encontraba cerrada el nivel de
resistencia a la rotación del equipo era bastante alto. Esto llevó a que el intento con carga para el
nivel de acelerador de 50 % solo tuviera un dato, ya que para la que sería la mínima carga, el
sistema ya se encontraba a una velocidad alrededor los 800 RPM, una velocidad muy cercana a la
mínima de funcionamiento del dinamómetro. Este es un problema que se habría repetido para
todos los intentos a un nivel de acelerador menor a 50 %.

34
6. Conclusión
Luego del proceso de investigación normativa y de diseño y de la implementación y validación de
un banco y protocolo de pruebas, se puede concluir que, primero, para poder establecer la
eficiencia de un tren de potencia en distintas condiciones de trabajo, se debe poder establecer
voltaje, corriente, par torsional y velocidad angular del tren para una amplia serie de
combinaciones de velocidad angular y par torsional en el rango de trabajo del sistema. Segundo,
el banco de pruebas desarrollado permite medir para trenes de potencia eléctricos de menos de 20
kW de potencia, el par torsional en un rango entre 0 Nm y 60 Nm con una precisión de ± 5 %. La
velocidad angular en un rango entre 10 RPM y 99’999 RPM con una precisión de 1 RPM. Voltaje
DC en un rango entre 0 V y 600 V con una precisión de 0.5%. Y la corriente en un rango entre 0
A y 500 A. Tercero, el protocolo enunciado propone satisfactoriamente, un método para establecer
las combinaciones de velocidad angular y par torsional en las que se debe realizar mediciones
sobre el tren de potencia de interés, una estrategia para realizar el barrido de los puntos de interés
variando la potencia entregada por el tren y el nivel de carga aplicado por el dinamómetro y un
criterio para establecer que los datos obtenidos son de estado estable. Cuarto, se desarrolló una
serie de herramientas que facilitan la implementación del protocolo, como lo son, el controlador
de nivel de acelerador, el cual nos permite sustituir el pedal de acelerador usado para variar la
potencia de entrada de los trenes de potencia, por un sistema más estable y adecuado para procesos
de pruebas de laboratorio; y el programa de post-procesamiento de los datos, el cual automatiza el
proceso de construcción de las gráficas de interés, a partir de los resultados de las pruebas. Y
quinto, se construyó un mapa de eficiencias parcial del tren de potencia del kart eléctrico del
departamento, el cual predice el comportamiento de la eficiencia del tren para, pares torsionales
menores a 17.5 Nm, velocidades angulares de entre 1000 RPM y 3000 RPM y potencias mecánicas
menores a 1600 W.

35
7. Recomendaciones y sugerencias
Sobre el montaje actual se recomienda tener en cuenta una serie de aspectos , primero, sustituir las
celdas averiadas del banco de baterías, con el fin de aumentar el tiempo de pruebas, un aspecto
crítico, especialmente en los intentos a potencias de entrada altas. Segundo, realizar la
alimentación del Emus BMS a través de un conversor DC - DC y no directamente de las celdas,
de manera que la alimentación de todos los sistemas quede a 48 V, además, para tener una
protección contra sobrevoltaje a la entrada del Emus. Tercero, tener siempre un ventilador con
buen caudal refrigerando el motor durante la realización de las pruebas con carga. Cuarto, realizar
un monitoreo minucioso del nivel de carga de cada una de las celdas durante las pruebas, ya que
durante este periodo, especialmente a altos niveles de acelerador, el nivel de carga de algunas de
las celdas puede llegar a niveles críticos sin que se note en el voltaje general del banco de baterías.
Y quinto, rotar el dinamómetro previo a la sujeción, con el fin de que desagüe mejor. Y así, lograr
tener la menor carga posible cuando la válvula de entrada se encuentre cerrada.
Adicionalmente, se sugiere realizar una serie de mejoras al montaje actual, primero, sustituir las
válvulas de entrada y salida del dinamómetro por válvulas electrónicas de control de flujo, lo
cual permite realizar un mejor control del nivel de carga, a la vez que abre la posibilidad de
poder realizar a futuro un proceso de mapeo autónomo. Y segundo, mapear otros trenes de
potencia eléctricos de menos de 20 kW de potencia mecánica, de manera que se pueda validar el
funcionamiento de montaje de manera más amplia.
36
8. Bibliografía
[1] S. Porras, «Estudio experimental de la aerodinámica de vehículos ligeros,» Uniandes, Bogotá D.C., 2018.
[2] T. D. Gillespie, Fundamentals of vehicle dynamics, Warrendale: Society of Automotive Engineers.
[3] IEEE, «IEEE Standard Test Procedure for Polyphase Induction Motors and Generators,» IEEE, New York, 2017.
[4] JSI, «Electric Vehicle - Electric motors- Test method of maximum power,» JSA, 2004.
[5] SAE, «J 1312,» SAE International, 1995.
[6] US Federal Goverment, «40 CFR 1065.510 - Engine mapping,» de Code of Federal Regulations .
[7] R. Bojoi, E. Armando, E. Pastorelli y K. Lang, «Efficiency and loss mapping of AC motors using advance testing tools,» de XXII International Conference on Electrical Machines (ICEM), Lausanne, 2016.
[8] M. Novak, J. Novak, Z. Novak, J. Chysky y O. Sivkov, «Efficiency Mapping of a 100 kW PMSM for Traction,» de 2017 IEEE 26th International Symposium on Industrial Electronics (ISIE), Edinburgh, 2017.
[9] M. A. Benavides Huertas, «Construcción de un dinamómetro hidráulico para disipar 100 kw en un rango de velocidades de 600 a 6000 RPM,» Uniandes, Santafé de Bogotá, 1994.
[10] J. D. Umaña Aguirre, «Construcción de un dinamómetro hidráulico para motores de combustión interna,» Uniandes, Bogotá, D.C., 2001.
[11] Omega, «RUGGED IN-LINE ROTARY TORQUE SENSORS WITH INTEGRAL SLIP-RING ASSEMBLY,» [En línea]. Available: https://www.omega.com/pressure/pdf/TQ501.pdf. [Último acceso: 24 Noviembre 2018].
[12] «Face and Rim methods,» de Shaft Alignment Handbook, Boca Raton, CRC Press, 2007, pp. 369-410.
[13] Intermec, «ACOPLES FLEXIBLES DE TORSIÓN INTERFLEX®,» [En línea]. Available: https://www.intermec.com.co/pdf/acoples_interflex.pdf. [Último acceso: 27 Noviembre 2018].
[14] Extech Instruments, «User's guide for Model RPM10,» Extech Instruments.
[15] BCI Ingeniería, «CELDA TIPO “S”,» 2012. [En línea]. Available: http://www.bci.co/catalogo/Catalago-sa.pdf. [Último acceso: 28 Noviembre 2019].
[16] Sevcon, «Gen4 Applications Reference Manual,» Sevcon.
[17] Henry’s Bench, «MCP41010 Digital Potentiometer Arduino User Manual,» 2017. [En línea]. [Último acceso: 28 Noviembre 2019].
37
9. Anexos
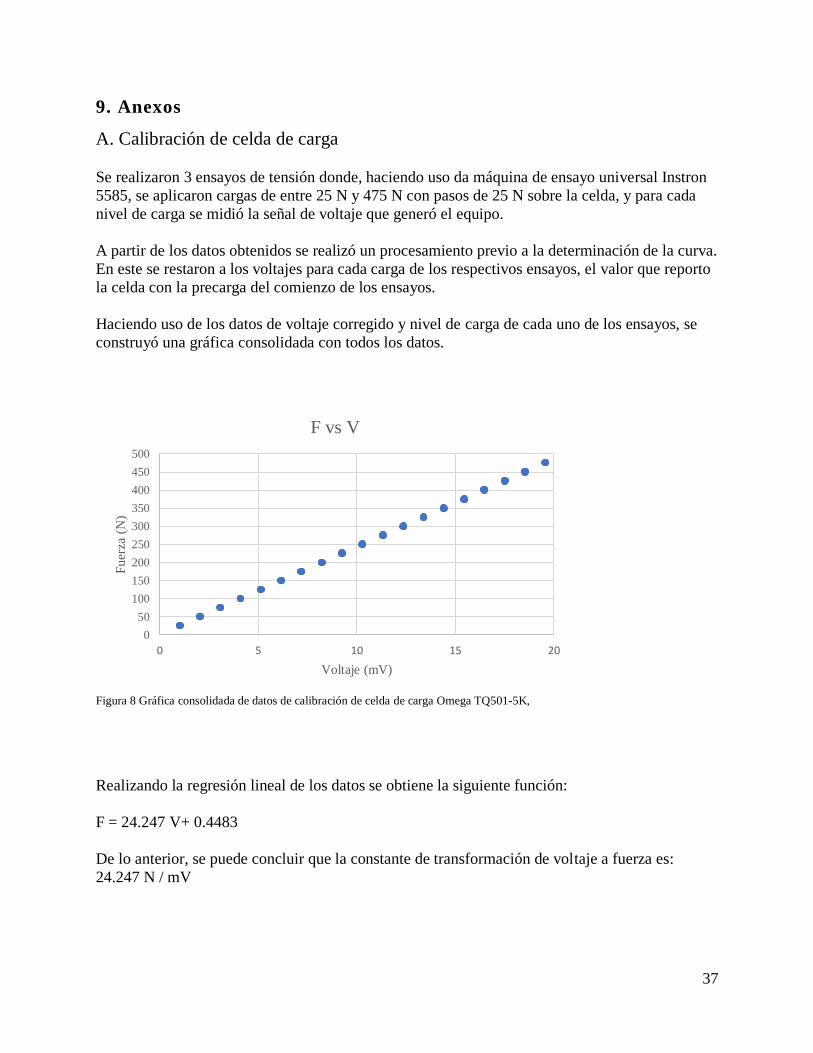
A. Calibración de celda de carga
Se realizaron 3 ensayos de tensión donde, haciendo uso da máquina de ensayo universal Instron
5585, se aplicaron cargas de entre 25 N y 475 N con pasos de 25 N sobre la celda, y para cada
nivel de carga se midió la señal de voltaje que generó el equipo.
A partir de los datos obtenidos se realizó un procesamiento previo a la determinación de la curva.
En este se restaron a los voltajes para cada carga de los respectivos ensayos, el valor que reporto
la celda con la precarga del comienzo de los ensayos.
Haciendo uso de los datos de voltaje corregido y nivel de carga de cada uno de los ensayos, se
construyó una gráfica consolidada con todos los datos.
Figura 8 Gráfica consolidada de datos de calibración de celda de carga Omega TQ501-5K,
Realizando la regresión lineal de los datos se obtiene la siguiente función:
F = 24.247 V+ 0.4483
De lo anterior, se puede concluir que la constante de transformación de voltaje a fuerza es:
24.247 N / mV
0
50
100
150
200
250
300
350
400
450
500
0 5 10 15 20
Fuer
za (
N)
Voltaje (mV)
F vs V
38
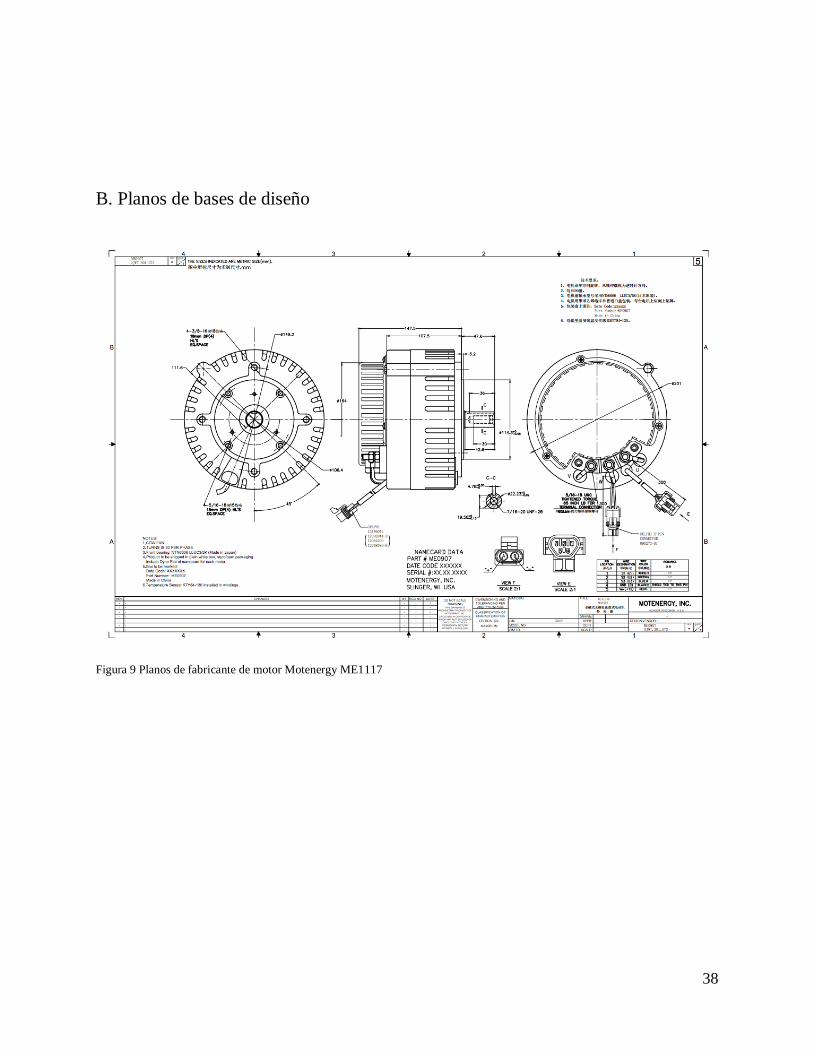
B. Planos de bases de diseño
Figura 9 Planos de fabricante de motor Motenergy ME1117

39
C. Planos de piezas Figura 10 Planos de soporte para chumaceras tipo A
Figura 11 Planos de soporte para chumaceras tipo B
40
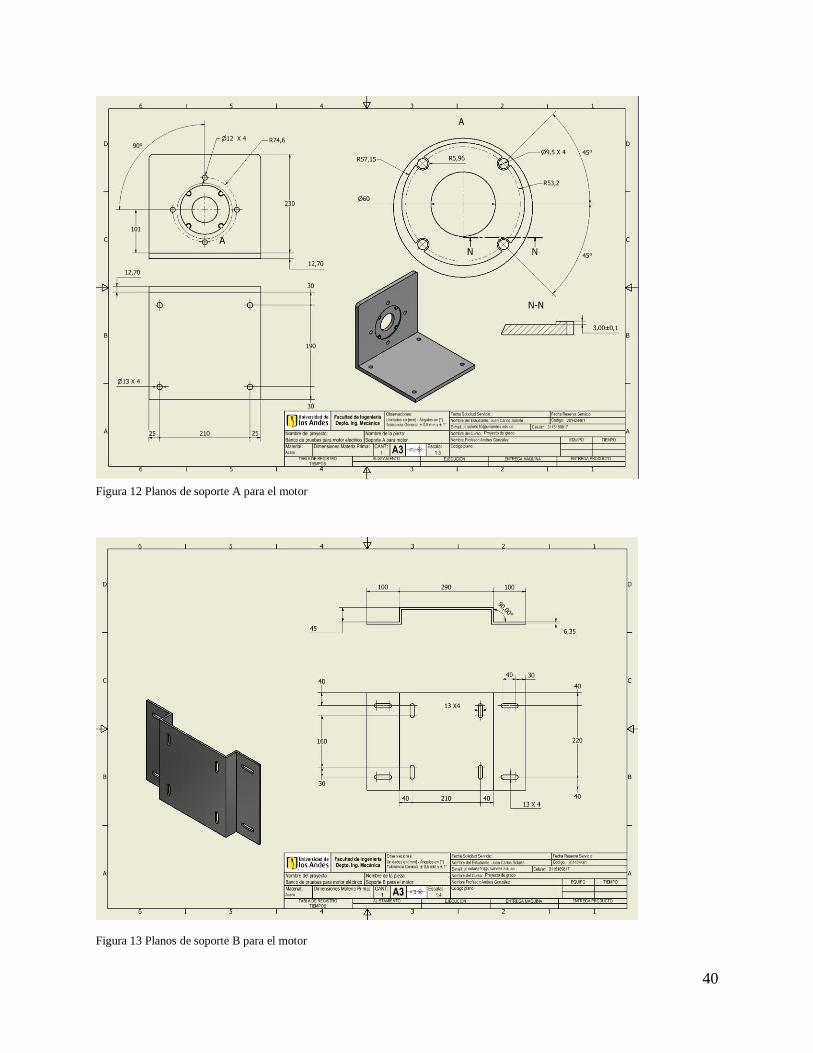
Figura 12 Planos de soporte A para el motor
Figura 13 Planos de soporte B para el motor
41
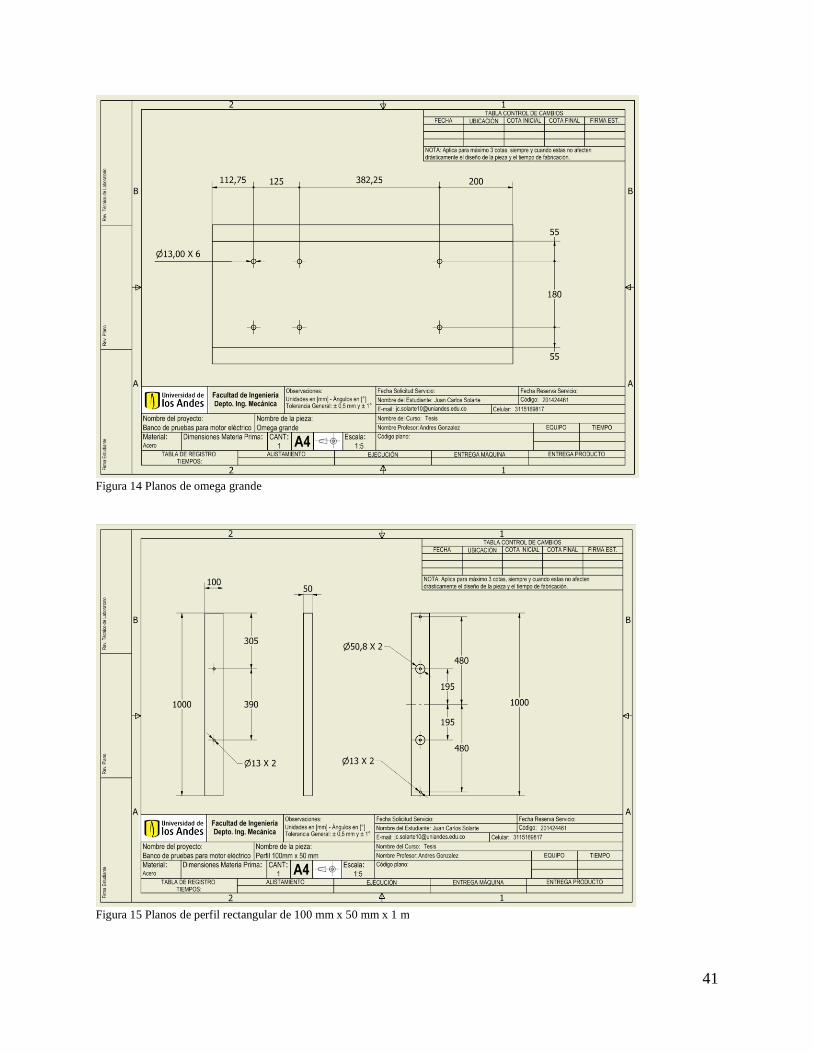
Figura 14 Planos de omega grande
Figura 15 Planos de perfil rectangular de 100 mm x 50 mm x 1 m
42
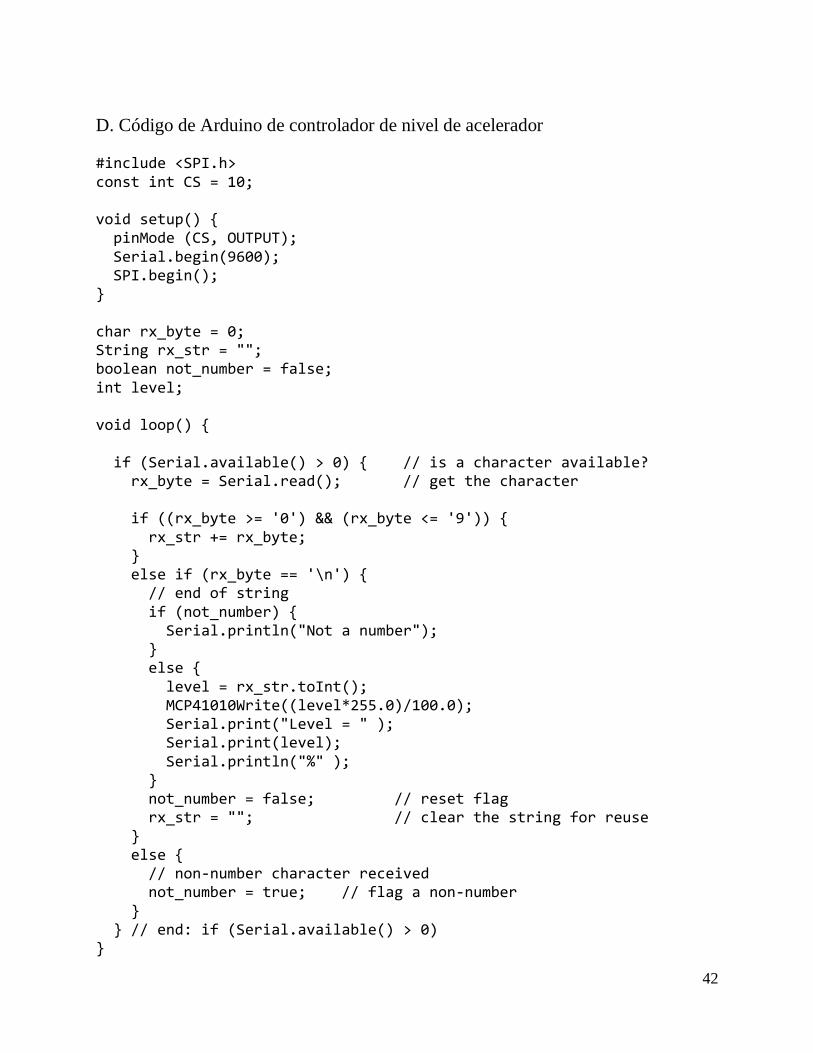
D. Código de Arduino de controlador de nivel de acelerador #include <SPI.h> const int CS = 10; void setup() { pinMode (CS, OUTPUT); Serial.begin(9600); SPI.begin(); } char rx_byte = 0; String rx_str = ""; boolean not_number = false; int level; void loop() { if (Serial.available() > 0) { // is a character available? rx_byte = Serial.read(); // get the character if ((rx_byte >= '0') && (rx_byte <= '9')) { rx_str += rx_byte; } else if (rx_byte == '\n') { // end of string if (not_number) { Serial.println("Not a number"); } else { level = rx_str.toInt(); MCP41010Write((level*255.0)/100.0); Serial.print("Level = " ); Serial.print(level); Serial.println("%" ); } not_number = false; // reset flag rx_str = ""; // clear the string for reuse } else { // non-number character received not_number = true; // flag a non-number } } // end: if (Serial.available() > 0) }
43
void MCP41010Write(byte value) { // Note that the integer vale passed to this subroutine // is cast to a byte digitalWrite(CS,LOW); SPI.transfer(B00010001); // This tells the chip to set the pot SPI.transfer(value); // This tells it the pot position digitalWrite(CS,HIGH); }
E. Código de post-procesamiento en Python
#Importar librerias import numpy as np import matplotlib.pyplot as plt import os import pandas as pd import matplotlib.tri as tri import scipy.interpolate as intplt #Inicialización de variables tau=[] # Par torsional o=[] # Velocidad angular v=[] # Voltaje c=[] # Corriente nivel = [] #Importación de datos base_dir = os.path.join( '.','Intento_') for i in range(1,11): serie_csv = base_dir+str(i)+'.csv' datos = pd.read_csv(serie_csv,encoding='latin-1') tau.append(np.array(datos['Par_torsional'])) o.append(np.array(datos['Velocidad_angular'])) v.append(np.array(datos['Voltaje'])) c.append(np.array(datos['Corriente'])) nivel.append("Intento " + str(i)) tau = np.asarray(tau)
44
o = np.asarray(o) omega=np.array(o*2*np.pi/60) v = np.asarray(v) c = np.asarray(c) P_mecanica = tau*omega # Potencia mecánica en el eje P_electrica= v*c # Potencia eléctrica a la entrada eta = P_mecanica/P_electrica # Eficiencia mecánica #Gráfica Par torsional vs Velocidad angular for i in range(np.shape(omega)[0]): plt.plot(omega[i,],tau[i,]) plt.xlabel("Velocidad angular (rad/s)") plt.ylabel("Par torsional (N m)") plt.title("Curva "+r'$\tau$'+ " vs " +r'$\omega$') plt.legend(nivel) plt.show() #Gráfica Potencia mecánica vs Velocidad angular for i in range(np.shape(omega)[0]): plt.plot(omega[i,],P_mecanica[i,]) plt.xlabel("Velocidad angular (rad/s)") plt.ylabel("Potencia mecánica (W)") plt.title("Curva "+r'$\ P_{mecánica} $'+ " vs " +r'$\omega$') plt.show() #Gráfica Potencia mecánica en espacio Par torsional vs Velocidad angular omega= np.concatenate(omega) omega= omega*(60/(2*np.pi)) tau= np.concatenate(tau) P_electrica= np.concatenate(P_electrica) P_mecanica = np.concatenate(P_mecanica) plt.scatter(omega, tau, c=P_mecanica, cmap= "plasma") clb = plt.colorbar() clb.ax.set_title(r'$\ P_{mecanica}$'+" (W)") plt.xlabel("Velocidad angular (RPM)") plt.ylabel("Par torsional (N m)") plt.show()
45
#Gráfica Potencia eléctrica en espacio Par torsioal vs Velocidad angular plt.scatter(omega, tau, c=P_electrica, cmap= "plasma") clb = plt.colorbar() clb.ax.set_title(r'$\ P_{electrica}$'+" (W)") plt.xlabel("Velocidad angular (RPM)") plt.ylabel("Par torsional (N m)") plt.show() #Gráfica eficiciencia en espacio Par torsioal vs Velocidad angular eta= np.concatenate(eta) plt.scatter(omega, tau, c=eta, cmap= "plasma") clb = plt.colorbar() clb.ax.set_title(r'$\eta$') plt.xlabel("Velocidad angular (RPM)") plt.ylabel("Par torsional (N m)") plt.show() #Mapa de eficiencias x0 = min(omega) x1 = max(omega) nx = 100j y0 = min(tau) y1 = max(tau) #y0 = 0 #y1 = 35 ny = 100j grid_x,grid_y=np.mgrid[x0:x1:nx,y0:y1:ny] points= np.zeros([len(omega),2]) for i in range(len(omega)): points[i]= np.array([omega[i],tau[i]]) values= eta values=np.array(values,dtype='float64') grid_e = intplt.griddata(points,values,(grid_x,grid_y)) fig,ax1 = plt.subplots(nrows=1) ax1.contour(grid_x, grid_y, grid_e, 8, linewidths=0.5, colors='k') cntr1 = ax1.contourf(grid_x, grid_y, grid_e, 8, cmap="plasma") clb=fig.colorbar(cntr1, ax=ax1) clb.ax.set_title(r'$\eta$')
46
plt.xlabel("Velocidad angular (RPM)") plt.ylabel("Par torsional (N m)") plt.show() plt.show()