diseño y cálculo del bastidor de un vehículo cosechador de...
TRANSCRIPT

Agradecimientos
Me gustaría agradecer en primer lugar a mis padres José y Conchi su apoyo a lo largo de todos estos años. Sin su ayuda, sobre todo moral, probablemente nunca habría terminado una carrera que los primeros años me parecía imposible.
También me gustaría agradecer a mi amigo y compañero de fatigas y aventuras Francisco Rodas, de AGROBOT, por proponerme este proyecto y ayudarme siempre que lo necesitaba.
A mi profesor tutor del proyecto, Carpóforo Vallellano Martín, me gustaría darle las gracias sobre todo por guiarme y ayudarme a no complicarme demasiado la vida. Sus consejos me han sido muy útiles y gracias a ellos el proyecto ha mejorado mucho.
Por último quiero agradecer a todos mis amigos que me han apoyado y soportado mi mal humor durante el tiempo que ha durado este proyecto.
Gracias a todos
José Eduardo Pérez Vaca

Diseño y cálculo del bastidor de un vehículo cosechador de fresas
Memoria
MEMORIA DEL PROYECTO
José Eduardo Pérez Vaca
Ingeniería Industrial
Diseño y cálculo del bastidor de un vehículo cosechador de fresas
Memoria
MEMORIA DEL PROYECTO
1
1. Introducción y objetivos ....................................... 5 1.1. Antecedentes ................................................... 5 1.2. Características del vehículo cosechador CF-
24𝛼 ...................................................................... 8 1.3. Restricciones al diseño .................................. 9 1.4. Objetivos de este proyecto ......................... 10
2
2. El bastidor de un vehículo .................................. 11 2.1. Clases de bastidores ...................................... 11 2.1.1. Bastidor independiente ......................... 11 2.1.2. Bastidor plataforma .............................. 13 2.1.3. Carrocería autoportante ....................... 14 2.2. Diseño de los bastidores ............................... 15 2.2.1. Perfil en U ............................................... 15 2.2.2. Perfil cajeado ......................................... 15 2.2.3. Perfil en doble T ..................................... 15 2.3. Tipos de bastidores ........................................ 16 2.3.1. En escalera (o en H) ............................... 16 2.3.2. En columna (o en X) ............................... 16 2.3.3. Perimétrico ............................................. 17 2.3.4. Tubular .................................................... 17
3
3. Cálculo de estructuras metálicas ....................... 18 3.1. Estados límite ................................................. 18 3.1.1. Cálculo en los estados límites ............... 19 3.2. Análisis estructural ........................................ 19 3.2.1. Métodos de análisis ............................... 20 3.2.2. Clasificación de las secciones
transversales ..................................................... 20 3.2.3. Elementos en compresión axial ............ 24 3.2.4. Elementos en compresión y flexión
combinadas ....................................................... 26 3.3. Uniones soldadas en estructuras planas ..... 30 3.3.1. Clasificación de las uniones .................. 30 3.3.2. Uniones entre perfiles RHS sometidos a
momento flector ............................................... 32 3.4. Uniones soldadas en varios planos ........... 37 3.5 Cálculo de soldaduras ................................... 37
4
4. Criterios de diseño del bastidor ......................... 39 4.1. Características del vehículo cosechador ..... 39 4.1.1. Descripción general .............................. 39 4.1.2. Características del vehículo ................. 40 4.2. Restricciones al diseño ................................ 40 4.3. Criterios de resistencia ................................. 41 4.4. Criterios de rigidez ........................................ 42 4.4.1. Rigidez a flexión .................................... 43 4.4.2. Rigidez a torsión ................................... 43 4.5. Estabilidad al vuelco .................................... 44 4.6. Elección del material ..................................... 46 4.7. Fabricación y costes ...................................... 47
5
5. Geometría del bastidor ...................................... 49 5.1. Diseños preliminares ..................................... 49 5.2. El modelo V1 .................................................. 52 5.3. El modelo V2 .................................................. 54 5.4. El modelo V3 ................................................. 59
6
6. Calculo del bastidor ............................................ 68 6.1. Definición de las cargas................................. 68 6.2. Definición de los apoyos ............................... 70 6.3. Determinación de los perfiles de las barras 70 6.4. Hipótesis de cálculo ....................................... 71 6.4.1. Análisis elástico lineal. Pequeños
desplazamientos ............................................... 71 6.4.2. Clasificación de las secciones
transversales ..................................................... 71 6.4.3. Estabilidad de los elementos
estructurales ..................................................... 72 6.4.4. Uniones ................................................... 72 6.5. El cálculo del bastidor V3 .............................. 72 6.5.1. Hipótesis de carga ................................. 72 6.5.2. Estudio estático mediante elementos
finitos ................................................................. 73 6.5.3. Estudio estático con pérdida parcial de
apoyo ................................................................. 82 6.5.4. Estudio estático del vuelco ................... 88 6.6. Conclusiones acerca del bastidor V3 ........ 93
Diseño y cálculo del bastidor de un vehículo cosechador de fresas
Memoria
7
7. Mediciones y presupuesto ................................. 94
8
8. Conclusiones y futuras líneas de trabajo ........... 95 8.1. Conclusiones ................................................. 95 8.2. Futuras líneas de trabajo ............................ 96
9
9. Bibliografía ......................................................... 97
Diseño y cálculo del bastidor de un vehículo cosechador de fresas
ANEXOS
1
Calculos Mecanicos ................................................ 99
2
Fabricación ........................................................... 161
3
Planos ................................................................... 187
Diseño y cálculo del bastidor de un vehículo cosechador de fresas
5 Memoria
1. Introducción y objetivos
1.1. Antecedentes
Adesva, la Asociación para el desarrollo del sistema productivo vinculado a la agricultura onubense es una entidad sin ánimo de lucro que aglutina a las empresas más representativas de los sectores agroindustrial y servicios auxiliares de la nueva agricultura de Huelva.
Como fruto de distintos acuerdos de colaboración con Adesva, el CDTI (Centro para el desarrollo tecnológico industrial) y con la Junta de Andalucía, nace en año 2009 AGROBOT con sede en el centro tecnológico Adesva.
Comienzan así una serie de innovadores proyectos cuyo objetivo común es modernizar el sector agrícola con la ayuda de las nuevas tecnologías.
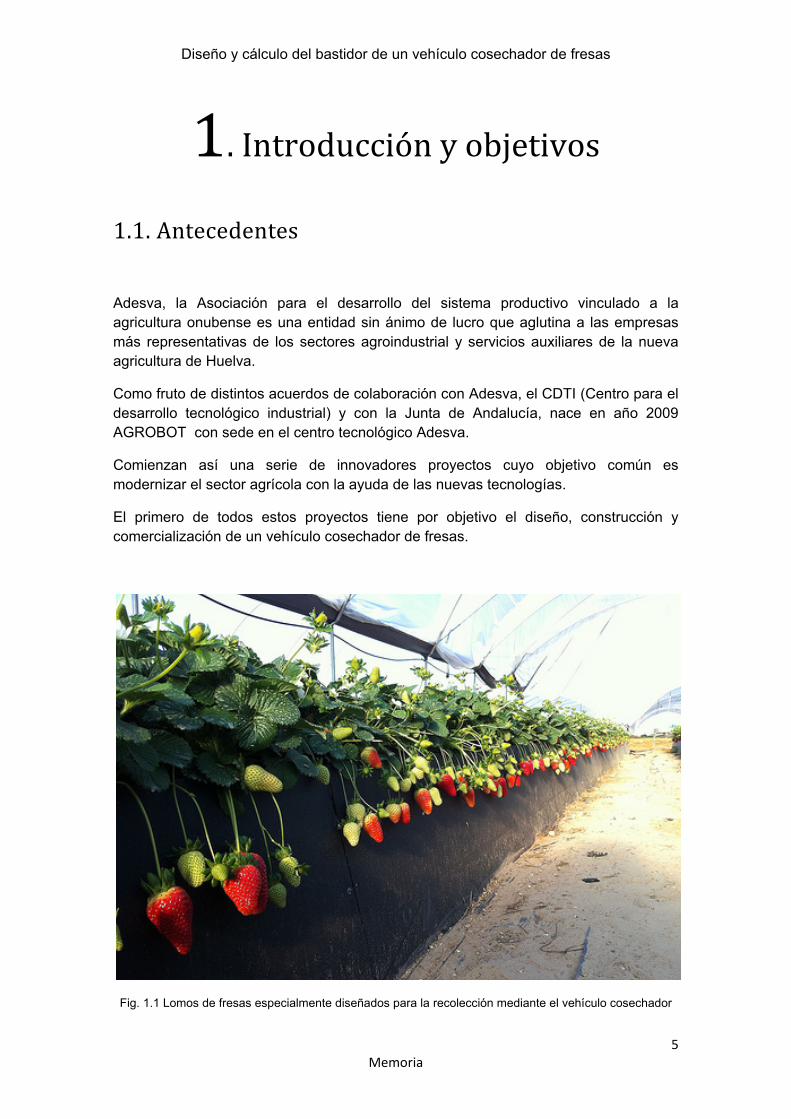
El primero de todos estos proyectos tiene por objetivo el diseño, construcción y comercialización de un vehículo cosechador de fresas.
Fig. 1.1 Lomos de fresas especialmente diseñados para la recolección mediante el vehículo cosechador
Diseño y cálculo del bastidor de un vehículo cosechador de fresas
6 Memoria
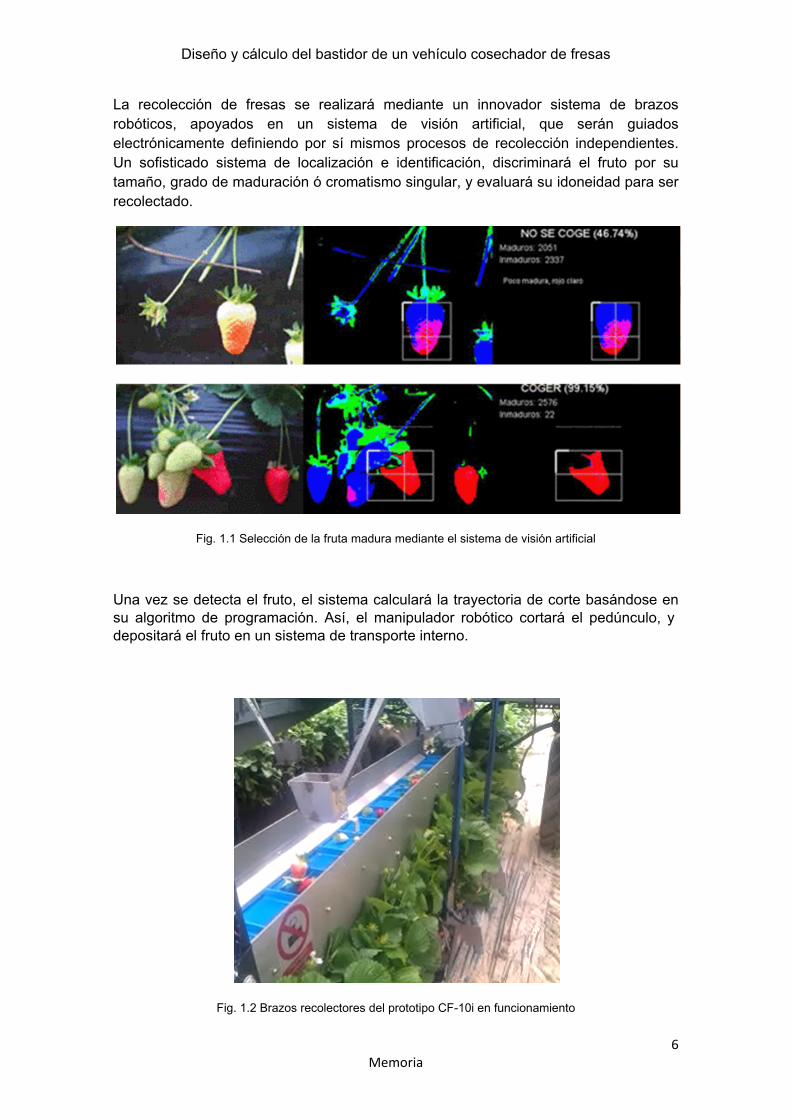
La recolección de fresas se realizará mediante un innovador sistema de brazos robóticos, apoyados en un sistema de visión artificial, que serán guiados electrónicamente definiendo por sí mismos procesos de recolección independientes. Un sofisticado sistema de localización e identificación, discriminará el fruto por su tamaño, grado de maduración ó cromatismo singular, y evaluará su idoneidad para ser recolectado.
Fig. 1.1 Selección de la fruta madura mediante el sistema de visión artificial
Una vez se detecta el fruto, el sistema calculará la trayectoria de corte basándose en su algoritmo de programación. Así, el manipulador robótico cortará el pedúnculo, y depositará el fruto en un sistema de transporte interno.
Fig. 1.2 Brazos recolectores del prototipo CF-10i en funcionamiento

Diseño y cálculo del bastidor de un vehículo cosechador de fresas
7 Memoria
Cintas transportadoras conducirán el flujo de frutos hacía el módulo de manipulado, en la parte delantera del vehículo. Una vez aquí, un grupo de operarios clasifica y envasa el continuo de fresas hasta confeccionar el producto final que cierra el ciclo productivo del cliente.
Previamente al diseño del modelo comercial, cuyo nombre interno es CF-24𝛼, AGROBOT construye un pequeño prototipo como soporte de los principales sistemas de la cosechadora. Este prototipo denominado CF-10i, tenía las siguientes características:
• Trasmisión hidráulica con tracción a las 2 ruedas delanteras. • 3 bombas hidráulicas de caudal fijo. • Motor eléctrico con variador de frecuencia. • Grupo electrógeno. • 10 brazos recolectores. • Sistema de autoguiado.
Fig. 1.3 Prototipo CF-10i de AGROBOT
Diseño y cálculo del bastidor de un vehículo cosechador de fresas
8 Memoria
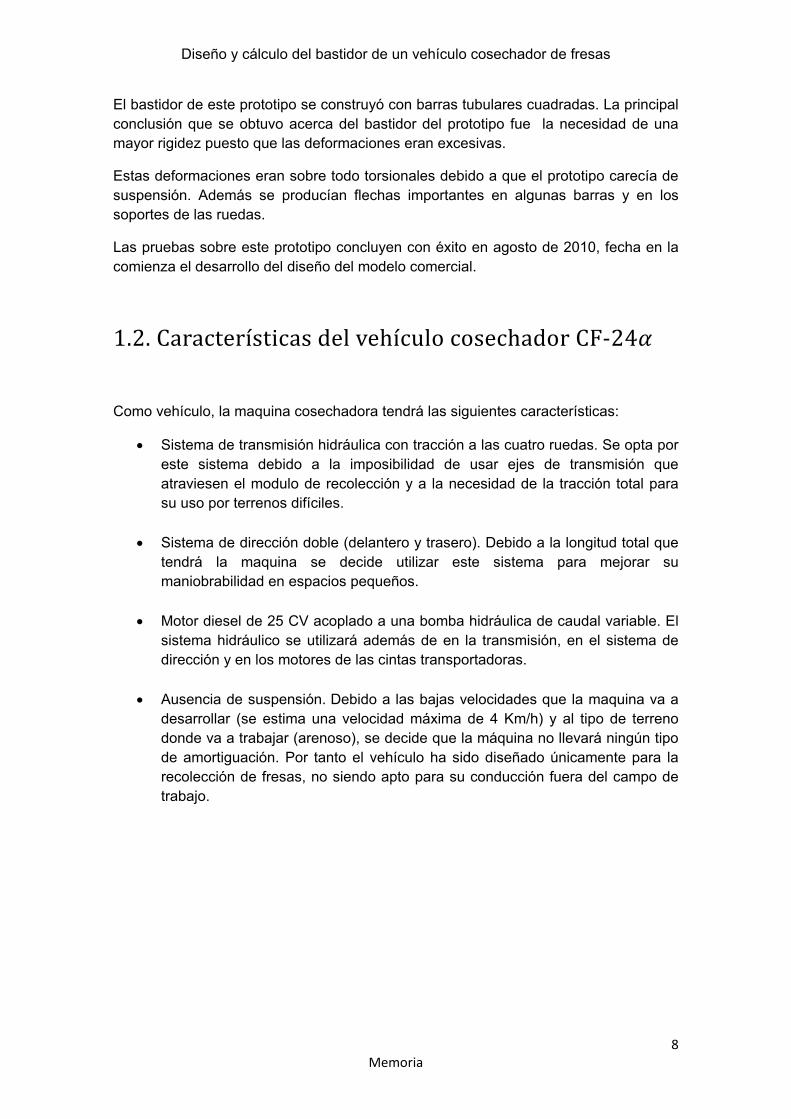
El bastidor de este prototipo se construyó con barras tubulares cuadradas. La principal conclusión que se obtuvo acerca del bastidor del prototipo fue la necesidad de una mayor rigidez puesto que las deformaciones eran excesivas.
Estas deformaciones eran sobre todo torsionales debido a que el prototipo carecía de suspensión. Además se producían flechas importantes en algunas barras y en los soportes de las ruedas.
Las pruebas sobre este prototipo concluyen con éxito en agosto de 2010, fecha en la comienza el desarrollo del diseño del modelo comercial.
1.2. Características del vehículo cosechador CF-24𝛼
Como vehículo, la maquina cosechadora tendrá las siguientes características:
• Sistema de transmisión hidráulica con tracción a las cuatro ruedas. Se opta por este sistema debido a la imposibilidad de usar ejes de transmisión que atraviesen el modulo de recolección y a la necesidad de la tracción total para su uso por terrenos difíciles.
• Sistema de dirección doble (delantero y trasero). Debido a la longitud total que tendrá la maquina se decide utilizar este sistema para mejorar su maniobrabilidad en espacios pequeños.
• Motor diesel de 25 CV acoplado a una bomba hidráulica de caudal variable. El sistema hidráulico se utilizará además de en la transmisión, en el sistema de dirección y en los motores de las cintas transportadoras.
• Ausencia de suspensión. Debido a las bajas velocidades que la maquina va a desarrollar (se estima una velocidad máxima de 4 Km/h) y al tipo de terreno donde va a trabajar (arenoso), se decide que la máquina no llevará ningún tipo de amortiguación. Por tanto el vehículo ha sido diseñado únicamente para la recolección de fresas, no siendo apto para su conducción fuera del campo de trabajo.
Diseño y cálculo del bastidor de un vehículo cosechador de fresas
9 Memoria
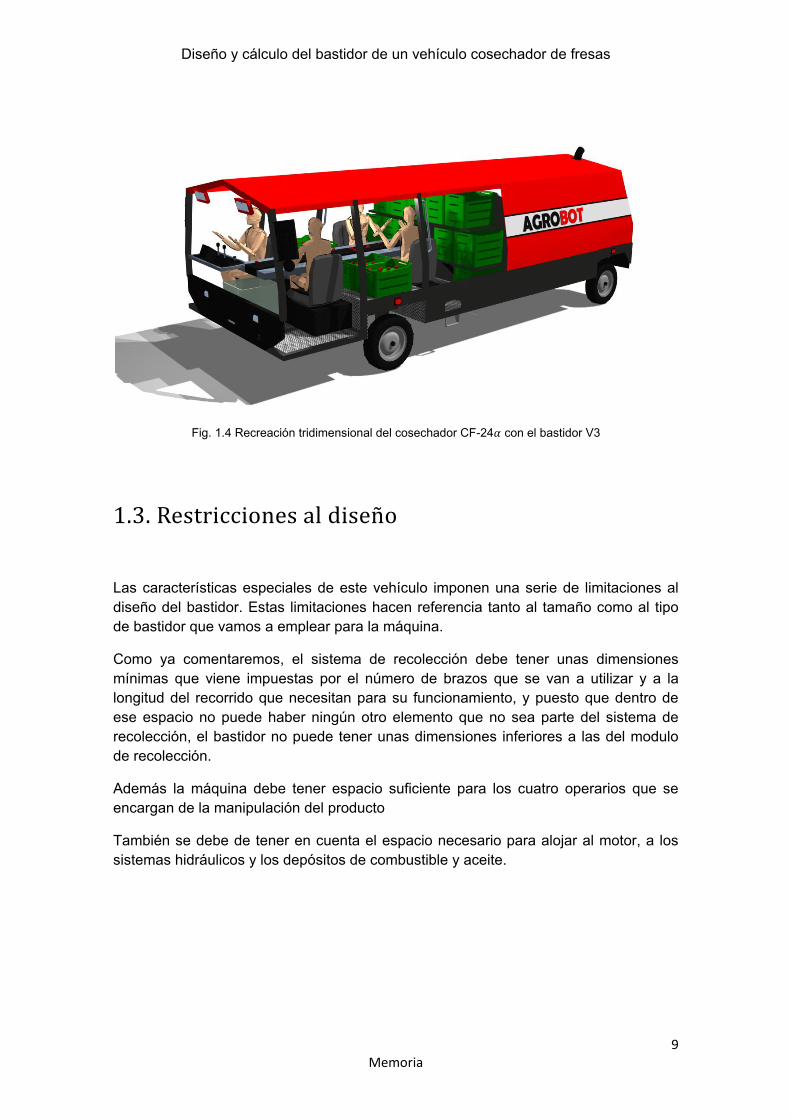
Fig. 1.4 Recreación tridimensional del cosechador CF-24𝛼 con el bastidor V3
1.3. Restricciones al diseño
Las características especiales de este vehículo imponen una serie de limitaciones al diseño del bastidor. Estas limitaciones hacen referencia tanto al tamaño como al tipo de bastidor que vamos a emplear para la máquina.
Como ya comentaremos, el sistema de recolección debe tener unas dimensiones mínimas que viene impuestas por el número de brazos que se van a utilizar y a la longitud del recorrido que necesitan para su funcionamiento, y puesto que dentro de ese espacio no puede haber ningún otro elemento que no sea parte del sistema de recolección, el bastidor no puede tener unas dimensiones inferiores a las del modulo de recolección.
Además la máquina debe tener espacio suficiente para los cuatro operarios que se encargan de la manipulación del producto
También se debe de tener en cuenta el espacio necesario para alojar al motor, a los sistemas hidráulicos y los depósitos de combustible y aceite.
Diseño y cálculo del bastidor de un vehículo cosechador de fresas
10 Memoria
1.4. Objetivos de este proyecto
El objeto de este proyecto consiste en el diseño y cálculo de un bastidor autoportante mediante barras tubulares para la versión comercial del vehículo cosechador de fresas AGROBOT.
Para el diseño del bastidor se tendrán en cuenta las conclusiones obtenidas durante las pruebas realizadas al primer prototipo, así como las particularidades que conlleva la construcción de un vehículo de características especiales.
El bastidor se calculará para solicitaciones de tipo estático y dinámico. Se analizará también la resistencia al vuelco del vehículo (estructura ROPS). El resultado de estos cálculos debe ser una estructura resistente lo más rígida, ligera y económica que sea posible en un tiempo razonable.
Para el cumplimiento de los objetivos se propone la siguiente metodología:
1. Obtención de una geometría aproximada. Esta geometría se obtiene a partir de una serie de restricciones y consideraciones derivadas del tipo de operación que la maquina desarrolla.
2. Determinación del tamaño de los perfiles de las barras mediante el método de rigidez.
3. Calculo de la estructura en los estados límite.
4. Comprobación a pandeo de las barras.
5. Cálculo y comprobación de las uniones.
6. Análisis de la estructura completa mediante el método de los elementos finitos.
Tanto para el diseño como para el cálculo del bastidor se usará el programa de diseño SolidWorks Premium 2010.