construcciÓn de prototipos proyecto escolar … · cuidados en la actualidad los ha hecho...
TRANSCRIPT

CONSTRUCCIÓN DE PROTOTIPOS
PROYECTO ESCOLAR
COLEGIO CAROL BAUR
BLINDBOT-1N (ROBOT PARA CIEGOS)
Mauricio Galindo Cohen, Carlos Alberto Núñez Goya, Pablo Antonio Rivas Mercado, Jesús Antonio Fernández Gallardo Márquez, Alejandro Thomas
Mackey
Resumen:
La Robótica como parte de la Mecatrónica ha permitido que los robots
sustituyan poco a poco a los seres humanos en trabajos físicos extremos,
monótonos ó peligrosos. Por otro lado un perro lazarillo, su manutención y
cuidados en la actualidad los ha hecho prohibitivos para la mayoría de las
personas invidentes y éstos solo tienen un bastón y la buena voluntad de la gente
como ayuda para desplazarse por la calles. El proyecto Blindbot-1 representa una
alternativa para la gente ciega que requiere de una ayuda mayor cuando se
traslada por la calle, pues Blindbot-1 es un robot diseñado con sensores
ultrasónicos, ópticos y mecánicos para prevenir al invidente de los posibles
obstáculos que éste pueda encontrar tales como: escaleras, personas, paredes,
etc. de manera autónoma y confiable. Le avisará usando sonidos y vibraciones de
los obstáculos. El invidente con un poco de capacitación podrá caminar de manera
segura, rápida y confiable pues sabrá que Blindbot-1 estará a su lado como
lazarillo robótico siempre dispuesto para hacer su trabajo de guía, requiriendo de
pocos cuidados y escaso mantenimiento pues con solo recargar su batería, estará
listo para trabajar.
BLINDBOT-1

CONTENIDO:
Introducción 3
Método 5
Resultados 14
Discusión 15
Conclusiones 17
BLINDBOT-1
2
Introducción:
Planteamiento del problema:
Para la mayoría de las personas invidentes, éstos solo tienen un bastón y
la buena voluntad de la gente como ayuda para desplazarse por la calles. El uso
de los perros lazarillos ha desaparecido casi por completo por lo costoso del
entrenamiento, manutención y cuidados que requiere el perro, así como, el
entrenamiento que requiere el ciego para usarlo.
Antecedentes
La palabra checa ‘Robota’ significa servidumbre o trabajador forzado,
y cuando se tradujo al inglés se convirtió en el término robot. Dicha narración se
refiere a un brillante científico llamado Rossum y su hijo, quienes desarrollan una
sustancia química que es similar al protoplasma. Utilizan ésta sustancia para
fabricar robots, y sus planes consisten en que los robots sirvan a la clase humana
de forma obediente para realizar todos los trabajos físicos, monótonos y
peligrosos.
El desarrollo de la tecnología incluye las poderosas computadoras, los
actuadores de control retroalimentados, transmisión de potencia través de
engranes, y la tecnología en sensores han contribuido a flexibilizar los
mecanismos autómatas para desempeñar tareas dentro de la industria y el hogar.
Son varios los factores que intervienen para que se desarrollaran los primeros
robots en la década de los 50’s.
Leyes de la robótica:
1. Un robot no puede actuar contra un ser humano o, mediante la inacción,
que un ser humano sufra daños.
2. Un robot debe de obedecer las órdenes dadas por los seres humanos,
salvo que estén en conflicto con la primera ley.
3. Un robot debe proteger su propia existencia, a no ser que esté en
conflicto con las dos primeras leyes.
La Robótica poco a poco ha ido cambiando los procesos de fabricación de
muchos de los artículos que usamos cada día. Muchos países como Japón,
BLINDBOT-1
3

Estados Unidos, Alemania y por supuesto México están desarrollando actualmente
muchos de estos Robots. La Minirobótica, es decir el diseño y puesta en marcha
de pequeños robots se utiliza mucho en la Medicina, exploración, automatización
y entretenimiento. Cada vez son más pequeños los dispositivos tales como
sensores y motores utilizados en los robots. Con base en lo anterior es muy
factible crear robots para ayudar de manera muy cercana a los seres humanos en
sus labores cotidianas. En este caso la gente invidente.
Hipótesis:
¿Será factible construir un lazarillo robotizado de bajo costo, para ayudar al
tránsito de invidentes y mejorar su calidad de vida?
Objetivos del proyecto:
Los objetivos del proyecto BLINDBOT-1 (robot para ciegos) son:
a) Desarrollar un sistema robótico de bajo costo, que permita a los
invidentes trasladarse de un lado a otro de manera segura, anticipando
mediante tonos y/o vibraciones los posibles obstáculos que pueda
encontrar tales como escalones, rampas, paredes, hoyos, personas, etc.
La operación del robot deberá ser sencilla y con facilidad de operación.
b) Mejorar la calidad de vida de los invidentes, al incrementar su seguridad
para trasladarse por las calles.
c) Proporcionar un robot de muy bajo costo y alta eficiencia para uso
doméstico.
Metodología:
Para el desarrollo del proyecto en primer término se ha realizado lo
siguiente:
a) Investigación documental sobre los robots disponibles a nivel doméstico
para uso de los invidentes.
b) Experimentación en la construcción y puesta en marcha del prototipo
Blindbot-1.
c) Pruebas de uso utilizando voluntarios en el interior de la escuela.
BLINDBOT-1
4

Materiales Utilizados:
- Solera y ángulo de aluminio en medidas de 1/8 X 1 pulgada
- Material plástico Cintra para la base y soportes
- Un bastón de uso médico
- Un conjunto de motor y transmisión recuperados de un juguete de
control remoto.
- Una rueda loca de 10 cms. de diámetro.
- Una batería recargable de 6 volts, 1 ampere/hora
- Una batería de 9 volts
- Tornillos de 1/8 de diámetro y diferentes longitudes.
- 1 sensor ultrasónico usados en Minirobótica (SRF05)
- 2 sensores reflexivos de tipo infrarrojo
- 2 sensores mecánicos
- 3 relevadores de 6 volts.
- 1 microcontrolador PIC 16F84
- Resistencias y capacitores
- Tabla fenólica
- Cables eléctricos
- 2 Zumbadores de 6 volts
- Vibradores de baja frecuencia (desarrollo segunda etapa)
Se utilizó la siguiente herramienta e instrumentación:
- Arco segueta
- Tornillo de banco
BLINDBOT-1
5
- Taladro Eléctrico
- Multímetro digital
- Computadora
- Interface USB para programar PIC´s
Con base en lo anterior, nuestro proyecto deberá actuar para
proporcionar de manera segura el tránsito de invidentes, sustituyendo el uso
del perro lazarillo, o del bastón convencional, contando para ello de
sensores, motores y un cerebro electrónico para determinar los obstáculos
y así salvaguardar al invidente.
Procedimiento:
El proyecto se ha desarrollado de la siguiente forma:
a) En primer término se investigó el estado del arte sobre las ayudas que
disponen los invidentes para desarrollar su vida cotidiana, en especial si
existe a nivel comercial algún robot hecho para invidentes y que les
permita trasladarse de manera segura por las calles. Nuestra
investigación arrojó que solo hay robots de ayuda para compras en
supermercados, un sistema global de posicionamiento (GPS) para su
ubicación y un bastón de muy alto costo para su movimiento.*(1)
b) Los integrantes del equipo comenzamos investigando sobre robots
móviles, sus usos y aplicaciones. Para ello nos planteamos el poder
desarrollar un robot de muy bajo costo y en forma de bastón. En un
principio quisimos que el bastón tuviera todo integrado, es decir, utilizar
muy pequeños componentes tales como motores, sensores, batería,
etc..
c) Lo anterior, nos pareció poco práctico en esta parte del proyecto por lo
limitado de nuestros recursos, aproximadamente $2,000 para construir el
robot. Por lo que decidimos junto con nuestros asesores el utilizar los
motores y transmisión de un coche de radio control que ya no
funcionaba muy bien (ver figura 1)
BLINDBOT-1
6

*(1) http://www.clarin.com/diario/2007/03/13/sociedad/s-03701.htm
Figura 1
Posteriormente fuimos montando cada uno de los componentes
mecánicos incluyendo el bastón. El diseño utiliza una rueda loca para que
facilite su maniobrabilidad, Blindbot-1 utiliza aluminio puesto que es ligero y
resistente, aunque se tuvo que utilizar un soporte de hierro para el bastón,
como se muestra en la figura 2.
d) Una vez que se terminó la construcción y puesta en marcha de la parte
mecánica incluyendo los motores, batería y demás componentes, se
hicieron primero pruebas en un protoboard de los sensores para
determinar cual podía servir mejor. Al final se escogieron de dos tipos:
d.1) Sensor ultrasónico de distancia SRF05 con un alcance máximo
de 3 m y un costo de $370.00 M.N.
BLINDBOT-1
7

d.2) Sensor analógico GPY0A21YK del tipo infrarrojo y un costo de
$180.00 M.N. y un alcance de 1.2 m.
Figura 2
El prototipo robótico para invidentes que permite por lo tanto, detectar
los obstáculos entre 1.2 y 3 m, dependiendo del sensor utilizado.
e) Escogimos utilizar un PIC 16F84 pues es un microcontrolador de 8 bits,
programable en sitio usando una interface del tipo USB, además es fácil
de programar usando lenguaje Basic o lenguaje C++, además de ser de
bajo costo (aproximadamente $80.00 M.N.)
f) El robot incluye 3 sensores de distancia uno al frente y dos a los
costados para la localización de objetos. Para la detección de los
BLINDBOT-1
8

escalones hacia arriba se usó un sensor de reflexión infrarrojo a una
altura de 12 cm. Esto se hizo para que el robot distinga entre un escalón
y un obstáculo tal como personas, paredes, automóviles, etc.. Para el
escalón hacia abajo se utiliza un sensor de posición ubicado en el frente
del robot y por gravedad caiga accionándose y avisando al invidente del
obstáculo.
g) Dos zumbadores y dos vibradores dactilares ubicados en el mango del
bastón proporcionan una asistencia sonora para el invidente de acuerdo
a la siguiente tabla:
Estatus Zumbador Vibrador 1 Vibrador 2Sistema Normal
sin obstáculo al
frente y los lados
Beep Intermitente
1
Sin Acción Sin Acción
Obstáculo al
frente
Beep Intermitente
1
Activado No activado
Obstáculo
Lateral
Beep Intermitente
1
Activado Activado
Escalón Arriba Beep Intermitente
2
Sin Acción Sin Acción
Escalón Abajo Beep Intermitente
2
Activado Sin Acción
Para evitar un accidente el robot se detendrá cuando el sensor de
distancia señale un obstáculo inmóvil a 40 cm de distancia, produciendo un
beep continuo de alarma.
h) Se construyó la interface de potencia utilizando relevadores para la
conexión de los motores a la batería, además de incluir un interruptor de
seguridad que detiene el robot de manera total y funciona cuando el
invidente sujeta el mango del bastón. Una vez terminadas las pruebas
armamos el robot teniendo cuidado con los componentes electrónicos
sensibles a la electricidad estática (sensores y microcontrolador).
BLINDBOT-1
9

i) La programación del PIC se realiza en lenguaje PIC C Lite el cual está
disponible en Internet de manera gratuita *(2), para ello se utiliza una
rutina de búsqueda en los sensores como se muestra en el diagrama de
flujo. Cabe aclarar que se tienen los sensores conectados a cada una de
las terminales del microcontrolador ya que este puede manejar hasta 8
sensores (entradas) y el mismo número de alarmas (8 salidas).
*(2) http://microchip.htsoft.com/products/compilers/PICClite.php
BLINDBOT-1
10
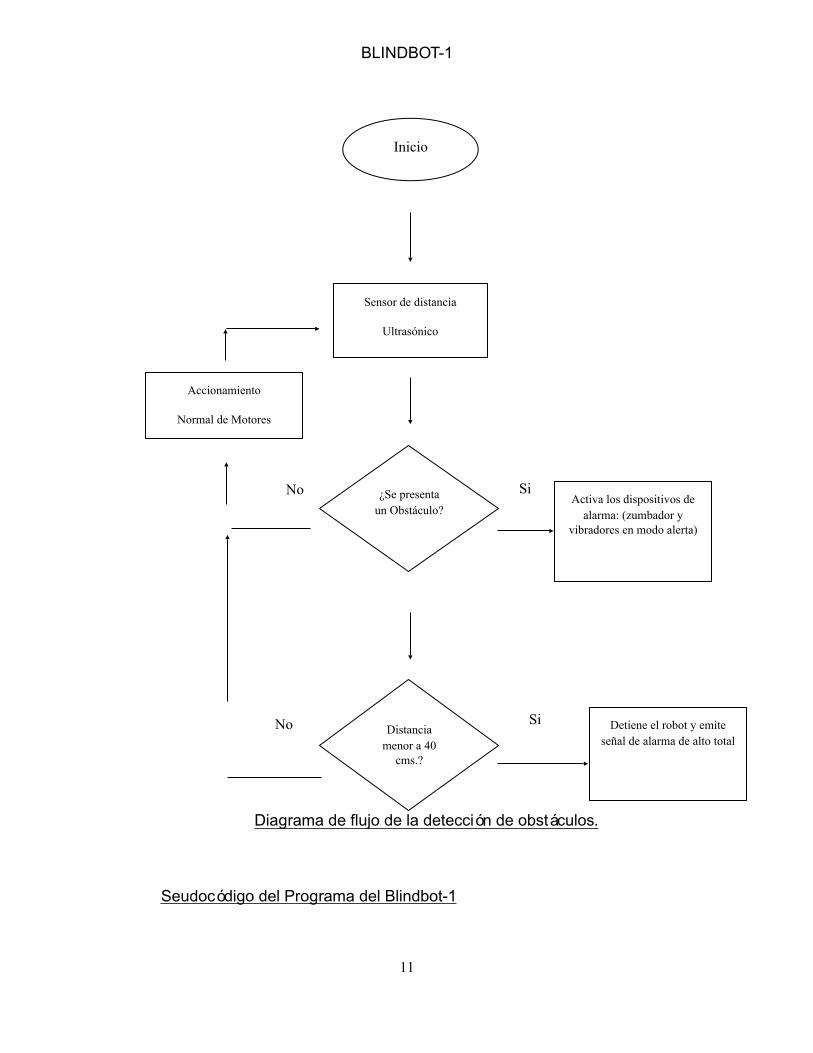
Diagrama de flujo de la detección de obstáculos.
Seudocódigo del Programa del Blindbot-1
BLINDBOT-1
11
Inicio
Sensor de distancia
Ultrasónico
¿Se presenta un Obstáculo?
Activa los dispositivos de alarma: (zumbador y
vibradores en modo alerta)
SiNo
Distancia menor a 40
cms.?
Si Detiene el robot y emite señal de alarma de alto total
No
Accionamiento
Normal de Motores

Una vez energizado el robot, el programa se ejecutará siguiendo la
siguiente lógica:
i) Inicio
ii) Leer el valor de la entrada del puerto ( interruptor de emergencia y
principal)
iii) Preguntar si ambos tienen el valor lógico adecuado
iv) Si la respuesta es no, sonar alarma que indique tipo de condición y
detener los motores hasta restablecer el sistema.
v) Si la respuesta es sí, seguir con la subrutina de búsqueda de objetos
vi) Al regresar de la subrutina de búsqueda regresar a punto (iii)
vii) Fin
En la subrutina de búsqueda de objetos se realiza así:
a) Leer el puerto de entrada del PIC.
b) Preguntar si el sensor ha sido activado
c) Si la respuesta es sí accionar las ayudas sonoras y vibratorias en el
puerto de salida del microcontrolador
d) Si la respuesta es no regresar al punto (a)
e) Si la distancia es menor a 40 cms. o se ha detectado un escalón
hacia abajo, se detendrán los motores y se avisará del obstáculo. En
caso contrario, se continuará con la operación normal de los
motores.
f) Fin
BLINDBOT-1
12

Como se podrá observar el programa es muy sencillo, ya que solo se estará
leyendo el puerto de entrada y accionando el puerto de salida del microcontrolador
que controla a los motores y a las alarmas sonoras.
Resultados:
Los resultados hasta ahora obtenidos, nos han demostrado que el robot
BLINDBOT-1 puede auxiliar a invidentes en su tránsito ya que dispone de
sensores tanto ópticos infrarrojos, ultrasónicos y mecánicos para detectar los
obstáculos. Es fácil de operar ya que asemeja un bastón normal, el cual dispone
en su mango de actuadores vibratorios y sónicos para que mediante una pequeña
capacitación, el invidente pueda anticipar los riesgos en su andar.
Aunque estamos todavía en la etapa de experimentación, podemos adelantar que
el robot funciona de manera adecuada en las pruebas que se han realizado con
compañeros nuestros que actúan de voluntarios, aunque tenemos que resolver
que la batería dure más en funcionamiento (actualmente dura 2 horas) y sea más
pequeña y ligera, ya que el prototipo actual pesa aproximadamente 2 kg.
Análisis Costo Beneficio:
El costo de fabricar el robot Blindbot-1 se aproxima a los dos mil pesos
como se muestra a continuación:
Solera y ángulo de aluminio
medida de 1/8 X 1 pulgada $ 100.00
Material plástico Cintra para la base y soportes $ 30.00
Un bastón de uso médico $ 150.00
Una rueda loca de 10 cm. de diámetro. $ 40.00
BLINDBOT-1
13

Una batería recargable de 6 volts, 1 ampere/hora $ 68.00
Tornillos de 1/8 de diámetro y diferentes longitudes. $ 20.00
2 sensores ultrasónicos usados en Minirobótica $ 670.00
2 sensores reflexivos de tipo infrarrojo $ 650.00
2 sensores mecánicos $ 40.00
3 relevadores de 6 volts. $ 48.00
1 microcontrolador PIC 16F84 $ 90.00
Resistencias y capacitores $ 20.00
Tabla fenólica $ 40.00
Cables eléctricos $ 15.00
2 Zumbadores de 6 volts $ 24.00
Este costo lo obtuvimos de acuerdo a lo que invertimos en el proyecto,
aunque si se produjera en masa este costo se reduciría significativamente
pudiendo obtener un costo cercano a los $1,000.00 M.N. Aunque si lo
comparamos con el costo de un bastón convencional (aprox. $300.00), este es
todavía alto, pero si consideramos los niveles de seguridad y confiabilidad que
proporciona en cuanto al mejoramiento del nivel de vida de los invidentes, es muy
conveniente y relevante.
Discusión:
Poco se ha hecho para mejorar las condiciones de vida de las personas
discapacitadas, tomemos como ejemplo las personas invidentes, muchas de ellas
tienen una gran inteligencia, habilidades con sus manos y usan de manera más
que perfecta sus demás sentidos. Por otro lado las condiciones que nos
encontramos en las calles de las ciudades hacen más difícil el poderse mover en
BLINDBOT-1
14

ellas de manera segura y confiable por la cantidad de obstáculos como son
personas, automóviles, paredes, escaleras, hoyos, árboles, etc..
Si para las personas normales es complicado poderse mover, para una
persona invidente es más peligroso. Esto nos motivó a intentar desde nuestra
posición como alumnos del Colegio Carol Baur construir un robot de muy bajo
costo que pudiese ayudar a los invidentes. Aunque nos hemos encontrado con
problemas para hacerlo, poco a poco y con apoyo de nuestros asesores hemos
casi terminado el Blindbot-1.
Nos referimos a que al robot lo estamos continuamente modificando, pues
la solución de un problema, nos conduce a otro y conforme estamos avanzando,
se van introduciendo mejoras tanto en parte mecánica, electrónica y de
programación. Aunque el robot está limitado en velocidad y cantidad de sensores,
con respecto a la movilidad que le puede dar a un ciego el uso de su bastón,
sabemos que con una mayor investigación y experimentación el Blinbot-1 irá
sustituyendo al bastón convencional.
Conclusiones:
BLINDBOT-1
15

Podemos concluir que el Blindbott-1 será un auxiliar de bajo costo
(aproximadamente $2,000.00 M.N.) para invidentes y estos puedan sustituir sus
bastones y/o perros lazarillos en un corto plazo, pues consideramos que
Blindbot-1 es factible de construir, prácticamente no requiere de mantenimiento, es
fácil de operar, pero sobre todo con sus sensores permite que el invidente tenga
más elementos para transitar por las calles de manera segura. Nuestra idea es
novedosa, en el sentido de que, aunque encontramos algo similar en Europa, el
costo de un “bastón inteligente” es de $2,000 euros. Aquí costaría cerca de $200
euros, un costo bastante bajo para el prototipo, aunque en serie este costo sería
de aproximadamente $500.00 M.N., lo que lo hará una buena opción para la gente
que no puede ver.
Bibliografía
Libros:
1. Robots Móviles - Estudio y Construcción. Giamarchi, Frederic. Edit.
Paraninfo, México, 2001.
2. Robótica Práctica, Tecnología y Aplicaciones. Angulo Usástegui,
José. Edit. Paraninfo, México, 1997.
3. Microcontroladores Fundamentos y Aplicaciones con PIC. VALDES, Fernando, PALLAS R. Edit. Alfaomega - Marcombo, México,
2007
Páginas WEB
http://www.el-universal.com.mx/articulos/39503.html
http://www.roboticspot.com/spot/vernot.shtml?noticia=Thu-May--5-10:27:38-2005
http://axxon.com.ar/not/136/c-1360081.htm
http://microchip.htsoft.com/products/compilers/PICClite.php
http://www.clarin.com/diario/2007/03/13/sociedad/s-03701.htm
BLINDBOT-1
16

BLINDBOT-1
17