cia 402 para controlador de motor cmmp‐as‐‐m3/-m0 · descripión perfil de equipo cia 402...
TRANSCRIPT

Descripión
Perfil de equipo
CiA 402
para el controlador
de motor CMMP-AS-...-M3
a través del bus de
campo:
– CANopen
– EtherCAT con
interfaz CAMC-EC
para el controlador
de motor
CMMP-AS-...-M0
a través del bus decampo:
– CANopen
8046796
1510b
CMMP‐AS‐...‐M3/-M0
CiA 402 para controlador demotor

CMMP‐AS‐...‐M3/-M0
2 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b –
Traducción del manual original
GDCP-CMMP-M3/-M0-C-CO-ES
CANopen®, CiA®, EthetCAT®, TwinCAT® son marcas registradas de los propietarios correspondientes
de las marcas en determinados países.
Identificación de peligros e indicaciones para evitarlos:
PeligroPeligros inminentes que pueden ocasionar lesiones graves e incluso la muerte
AdvertenciaPeligros que pueden ocasionar lesiones graves e incluso la muerte
AtenciónPeligros que pueden ocasionar lesiones leves o daños materiales graves
Otros símbolos:
NotaDaños materiales o pérdida de funcionalidad
Recomendaciones, sugerencias y referencias a otras fuentes de documentación
Accesorios indispensables o convenientes
Información sobre el uso de los productos respetuoso con el medio ambiente
Identificadores de texto:
� Actividades que se pueden realizar en cualquier orden
1. Actividades que se tienen que realizar en el orden indicado
– Enumeraciones generales
� Resultado de una actuación/Referencias a informaciones adicionales

CMMP‐AS‐...‐M3/-M0
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 3
Contenido – CMMP‐AS‐...‐M3/-M0
Notas sobre esta documentación presente 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Grupo destinatario 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Asistencia técnica 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Información sobre la versión 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Documentación 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1 Interfaces del bus de campo 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 CANopen [X4] 11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 Datos generales sobre CANopen 11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Cableado y asignación de clavijas 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.1 Asignación de pines 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.2 Instrucciones para el cableado 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Configuración del participante CANopen en el CMMP-AS-...-M3 14. . . . . . . . . . . . . . . . . . . . .
2.3.1 Ajuste del número de nodo con microinterruptores y FCT 15. . . . . . . . . . . . . . . . . .
2.3.2 Ajuste de la velocidad de transmisión con microinterruptores 16. . . . . . . . . . . . . .
2.3.3 Activación de la comunicación CANopen con microinterruptores 16. . . . . . . . . . . .
2.3.4 Ajuste de las unidades físicas (grupo de factores) 16. . . . . . . . . . . . . . . . . . . . . . .
2.4 Configuración del participante CANopen en el CMMP-AS-...-M0 17. . . . . . . . . . . . . . . . . . . . .
2.4.1 Ajuste del número de nodo mediante DINs o FCT 18. . . . . . . . . . . . . . . . . . . . . . . .
2.4.2 Ajuste de la velocidad de transmisión mediante DINs o FCT 18. . . . . . . . . . . . . . . .
2.4.3 Ajuste del protocolo (perfil de datos) mediante DINs o FCT 19. . . . . . . . . . . . . . . .
2.4.4 Activación de la comunicación CANopen mediante DINs o FCT 19. . . . . . . . . . . . .
2.4.5 Ajuste de las unidades físicas (grupo de factores) 20. . . . . . . . . . . . . . . . . . . . . . .
2.5 Configuración de master CANopen 20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Método de acceso CANopen 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Introducción 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Acceso SDO 22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.1 Secuencias SDO para leer y escribir 23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.2 Mensajes de error SDO 24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.3 Simulación de accesos SDO 25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 PDO-Message 26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.1 Descripción de los objetos 27. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.2 Objetos para la parametrización de PDO 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3.3 Activación de los PDO 35. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4 SYNC-Message 36. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5 EMERGENCY-Message 36. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5.1 Cuadro general 37. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5.2 Estructura del EMERGENCY Message 37. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CMMP‐AS‐...‐M3/-M0
4 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
3.5.3 Descripción de los objetos 38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.6 Gestión de la red (servicio NMT) 39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.7 Bootup 42. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.7.1 Cuadro general 42. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.7.2 Estructura del mensaje Bootup 42. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.8 Heartbeat (Error Control Protocol) 43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.8.1 Cuadro general 43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.8.2 Estructura del mensaje Heartbeat 43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.8.3 Descripción de los objetos 43. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.9 Nodeguarding (Error Control Protocol) 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.9.1 Cuadro general 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.9.2 Estructura de los mensajes Nodeguarding 44. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.9.3 Descripción de los objetos 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.9.4 Objeto 100Dh: life_time_factor 46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.9.5 Tabla de los Identifier 46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 EtherCAT con CoE 47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Sumario 47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Interfaz EtherCat CAMC-EC 47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Montaje de la interfaz EtherCAT en el controlador 49. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4 Asignación de clavijas y especificaciones de cables 49. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5 Configuración del participante EtherCAT 51. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.5.1 Ajuste de las unidades físicas (grupo de factores) 51. . . . . . . . . . . . . . . . . . . . . . .
4.6 Interfaz de comunicación CANopen 52. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6.1 Configuración de la interfaz de comunicación 52. . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6.2 Objetos nuevos y modificados en CoE 54. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6.3 Objetos no compatibles en CoE 62. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.7 Máquina de estado de comunicación 63. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.7.1 Diferencias entre las máquinas de estado de CANopen y EtherCAT 65. . . . . . . . . .
4.8 Trama SDO 66. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.9 Trama PDO 67. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.10 Control de errores 69. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.11 Trama de emergencia 69. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.12 Archivo de descripción de equipos XML 70. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.12.1 Estructura básica del archivo de descripción de equipos 70. . . . . . . . . . . . . . . . . .
4.12.2 Configuración de PDO de recepción en el nodo RxPDO 72. . . . . . . . . . . . . . . . . . . .
4.12.3 Configuración del PDO de transmisión en el nodo TxPDO 74. . . . . . . . . . . . . . . . . .
4.12.4 Órdenes de inicialización a través del nodo “Mailbox” 74. . . . . . . . . . . . . . . . . . . .
4.13 Sincronización (Distributed Clocks) 75. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 Ajustar parámetros 76. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 Cargar y guardar conjuntos de parámetros 76. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

CMMP‐AS‐...‐M3/-M0
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 5
5.2 Ajustes de compatibilidad 80. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3 Factores de conversión (Factor Group) 82. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4 Parámetros de paso de salida 92. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5 Regulador de corriente y adaptación de motor 99. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.6 Regulador de velocidad 107. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.7 Controlador de posición (Position Control Function) 109. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.8 Limitación de valor nominal 121. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.9 Adaptaciones del transmisor 124. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.10 Emulación de encoder incremental 128. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.11 Conexión adicional del valor nominal/real 130. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.12 Entradas analógicas 133. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.13 Entradas y salidas digitales 135. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.14 Detector de final de carrera/interruptor de referencia 141. . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.15 Muestreo de posiciones 144. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.16 Control de frenado 147. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.17 Información sobre el dispositivo 148. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.18 Gestión de errores 155. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6 Mando del equipo (Device Control) 158. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1 Diagrama de estado (State Machine) 158. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1.1 Cuadro general 158. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1.2 El diagrama de estado del controlador de motor (State Machine) 159. . . . . . . . . . .
6.1.3 Palabra de control (Controlword) 164. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1.4 Lectura del estado del controlador de motor 167. . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1.5 Palabras de estado (Statuswords) 169. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1.6 Descripción de los demás objetos 179. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7 Modos de funcionamiento 182. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.1 Ajuste del modo de funcionamiento 182. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.1.1 Cuadro general 182. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.1.2 Descripción de los objetos 182. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2 Modo de funcionamiento Recorrido de referencia (Homing Mode) 184. . . . . . . . . . . . . . . . . . .
7.2.1 Cuadro general 184. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2.2 Descripción de los objetos 185. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2.3 Secuencias del recorrido de referencia 189. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2.4 Control del recorrido de referencia 194. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3 Modo de funcionamiento Posicionamiento (Profile Position Mode) 194. . . . . . . . . . . . . . . . . .
7.3.1 Cuadro general 194. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3.2 Descripción de los objetos 195. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3.3 Descripción del funcionamiento 199. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.4 Especificación sincrónica de la posición (Interpolated Position Mode) 202. . . . . . . . . . . . . . . .
7.4.1 Cuadro general 202. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

CMMP‐AS‐...‐M3/-M0
6 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
7.4.2 Descripción de los objetos 202. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.4.3 Descripción del funcionamiento 208. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.5 Modo de funcionamiento Regulación de la velocidad (Profile Velocity Mode) 210. . . . . . . . . .
7.5.1 Cuadro general 210. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.5.2 Descripción de los objetos 212. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.6 Rampas de velocidad 218. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.7 Modo de funcionamiento Regulación del par (Profile Torque Mode) 221. . . . . . . . . . . . . . . . . .
7.7.1 Cuadro general 221. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.7.2 Descripción de los objetos 222. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A Apéndice técnico 227. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1 Especificaciones técnicas de la interfaz EtherCAT 227. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1.1 Informaciones generales 227. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1.2 Condiciones de funcionamiento y del entorno 227. . . . . . . . . . . . . . . . . . . . . . . . . . .
B Mensajes de diagnóstico 228. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1 Explicación de los mensajes de diagnosis 228. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2 Errorcodes a través de CiA 301/402 229. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.3 Mensajes de diagnosis con notas sobre la eliminación de fallos 233. . . . . . . . . . . . . . . . . . . . .
Índice 295. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CMMP‐AS‐...‐M3/-M0
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 7
Notas sobre esta documentación presenteLa presente documentación describe el perfil de dispositivo CiA 402 (DS 402) para los controladores
de motor CMMP‐AS‐...‐M3/-M0 conforme a la sección “Información sobre la versión” acerca de las
interfaces de bus de campo:
– CANopen – Interfaz [X4] integrada en el controlador del motor.
– EtherCAT – Interfaz opcional CAMC-EC en la posición de enchufe Ext2, solo para CMMP-AS-...-M3.
Además se adjuntan informaciones complementarias para el control, diagnóstico y parametrización de
los controladores de motores a través del bus de campo.
� Es necesario tener en cuenta los reglamentos generales de seguridad relativos al
CMMP‐AS‐...‐M3/-M0.
Los reglamentos generales de seguridad relativos al CMMP‐AS‐...‐M3/-M0 se encuentran
en la descripción del hardware GDCP-CMMP-AS-M3-HW-... y GDCP-CMMP-AS-M0-HW-...,
véase Tab. 2.
Grupo destinatario
Esta descripción está exclusivamente destinada a especialistas formados en tecnología de
automatización y control, con experiencia en instalación, puesta en funcionamiento, programación y
diagnóstico de sistemas de posicionamiento.
Asistencia técnicaPara cualquier consulta técnica, diríjase a su representante regional de Festo.
Información sobre la versión
La presente descripción se refiere a las siguientes versiones:
Controlador demotor
Versión
CMMP-AS-...-M3 Controlador de motor CMMP-AS-...-M3 a partir de rev. 01
Plugin CMMP-AS para FCT a partir de la versión 2.0.x.
CMMP-AS-...-M0 Controlador de motor CMMP-AS-...-M0 a partir de rev. 01
Plugin FCT CMMP-AS a partir de la versión 2.0.x.
Tab. 1 Versiones
Esta descripción no es válida para las versiones anteriores CMMP-AS-.... Para estas var
iantes utilice la descripción CANopen asignada para el controlador del motor CMMP‐AS.
NotaSi la versión del firmware es más reciente, compruebe si también hay una versión más
reciente de esta descripción � www.festo.com/sp

CMMP‐AS‐...‐M3/-M0
8 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
DocumentaciónSe puede encontrar más información sobre el controlador del motor en la documentación siguiente:
Documentación de usuario del controlador de motor CMMP-AS-...-M3/-M0Nombre, tipo Contenido
Descripción del hardware,
GDCP-CMMP-M3-HW-...
Montaje e instalación del controlador de motor CMMP-AS-...-M3para todas las variantes/clases de potencia (de 1 fase y de
3 fases), asignación de clavijas, mensajes de error,
mantenimiento.
Descripción de las funciones,
GDCP-CMMP-M3-FW-...
Descripción del funcionamiento (firmware) CMMP-AS-...-M3,
Notas sobre la puesta a punto.
Descripción del hardware,
GDCP-CMMP-M0-HW-...
Montaje e instalación del controlador de motor CMMP-AS-...-M0para todas las variantes/clases de potencia (de 1 fase y de
3 fases), asignación de clavijas, mensajes de error,
mantenimiento.
Descripción de las funciones,
GDCP-CMMP-M0-FW-...
Descripción del funcionamiento (firmware) CMMP-AS-...-M0,
Notas sobre la puesta a punto.
Descripción de FHPP,
GDCP-CMMP-M3/-M0-C-HP-...
Control y parametrización del controlador de motor mediante el
perfil Festo FHPP.
– Controlador de motor CMMP-AS-...-M3 con los siguientes
buses de campo: CANopen, Modbus TCP, PROFINET,
PROFIBUS, EtherNet/IP, DeviceNet, EtherCAT.
– Controlador de motor CMMP-AS-...-M0 con los buses de
campo CANopen, Modbus TCP.
Descripción de CiA 402 (DS 402),
GDCP-CMMP-M3/-M0-C-CO-...
Control y parametrización del controlador de motor mediante el
perfil de equipo CiA 402 (DS402)
– Controlador de motor CMMP-AS-...-M3 con los siguientes
buses de campo: CANopen y EtherCAT.
– Controlador de motor CMMP-AS-...-M0 con bus de campo
CANopen.Descripción del Editor CAM,
P.BE-CMMP-CAM-SW-...
Funcionalidad de disco de leva (CAM) del controlador de motor
CMMP-AS-...-M3/-M0.
Descripción del módulo de
seguridad, GDCP-CAMC-G-S1-...
Técnica de seguridad funcional para el controlador de motor
CMMP-AS-...-M3 con la función de seguridad STO.
Descripción del módulo de
seguridad, GDCP-CAMC-G-S3-...
Técnica de seguridad funcional para el controlador de motor
CMMP-AS-...-M3 con las funciones de seguridad STO, SS1, SS2,
SOS, SLS, SSR, SSM, SBC.
Descripción de la función de
seguridad STO,
GDCP-CMMP-AS-M0-S1-...
Técnica de seguridad funcional para el controlador de motor
CMMP-AS-...-M0 con la función de seguridad integrada STO.
CMMP‐AS‐...‐M3/-M0
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 9
Nombre, tipo Contenido
Descripción de sustitución y
conversión de proyectos,
GDCP-CMMP-M3/-M0-RP-...
Controlador de motor CMMP-AS-...-M3/-M0 como equipo de
repuesto para los controladores de motor CMMP-AS anteriores.
Modificaciones en la instalación eléctrica y descripción de la
conversión de proyectos.
Ayuda del plugin CMMP-AS
para FCT
Interfaz y funciones del plugin CMMP-AS para Festo
Configuration Tool.
� www.festo.com/sp
Tab. 2 Documentación del controlador de motor CMMP-AS-...-M3/-M0

1 Datos generale
10 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
1 Interfaces del bus de campoEl control y la parametrización a través de CiA 402 son compatibles con el CMMP‐AS‐...‐M3/-M0 a
través de las interfaces de bus de campo según Tab. 1.1. La interfaz CANopen está integrada en el con
trolador de motor; las interfaces permiten ampliar el controlador de motor con más interfaces de bus
de campo. La configuración del bus de campo se efectúa con los microinterruptores [S1].
Bus de campo Interfaz Descripción
CANopen [X4] – Integrada � Capítulo 2
EtherCAT Interfaz CAMC-EC � Capítulo 4
Tab. 1.1 Interfaces del bus de campo para CiA 402
M0Los controladores de motor CMMP-AS-…-M0 solo disponen de la interfaz de bus de cam
po CANopen y no tienen posiciones de enchufe para interfaces, módulos de microinte
rruptores o módulos de seguridad.
1
2
3
4
5
1 Microinterruptor [S1] para los ajustes del busde campo en el módulo de microinterruptores o de seguridad en la posición de enchufeExt3
2 Posiciones de enchufe Ext1/Ext2 para interfaces
3 Resistencia de terminación CANopen [S2]4 Interfaz CANopen [X4]5 CAN-LED
Fig. 1.1 Controlador de motor CMMP‐AS‐...‐M3: vista frontal, ejemplo con el módulo de
microinterruptores en Ext3

2 CANopen [X4]
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 11
2 CANopen [X4]
2.1 Datos generales sobre CANopen
CANopen es un estándar establecido por la asociación “CAN in Automation”. Dicha asociación reúne a
numerosos fabricantes de dispositivos. Este estándar ha sustituido en gran medida a los protocolos
CAN específicos de los fabricantes utilizados hasta ahora. Así el usuario final dispone de un interfaz de
comunicación independiente del fabricante.
La asociación dispone, entre otros, de los siguientes manuales:
CiA Draft Standard 201 … 207:En este documento se recogen los fundamentos generales y la implementación de CANopen en el
modelo de capas OSI. El presente manual de CANopen contiene los puntos relevantes de dicho manual,
por lo que en general no es preciso adquirir el DS 201 … 207.
CiA Draft Standard 301:En este documento se describe la estructura básica del directorio de objetos de un equipo CANopen y
el acceso al mismo. Además describe con más detalle los enunciados del DS201 … 207. Los elementos
del directorio de objetos necesarios para las familias de controladores de motor CMMP así como los
métodos de acceso correspondientes están descritos en el presente manual. Es recomendable adquirir
el manual DS 301 pero no es imprescindible.
CiA Draft Standard 402:Este manual trata de la implementación concreta de CANopen en controles para accionamientos. Aun
que todos los objetos implementados también están brevemente documentados y descritos en el
presente manual de CANopen, el usuario debería disponer de este manual.
Dirección para pedidos: � www.can-cia.de
La implementación CANopen del controlador del motor cumple los estándares siguientes:
1 CiA Draft Standard 301, Versión 4.02, 13 de febrero de 2002
2 CiA Draft Standard Proposal 402, Versión 2.0, 26 de julio de 2002

2 CANopen [X4]
12 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
2.2 Cableado y asignación de clavijas
2.2.1 Asignación de pines
La interfaz CAN ya está integrada en el controlador de motor CMMP‐AS‐...‐M3/-M0 y por lo tanto siem
pre está disponible. La conexión de bus CAN es un conector DSUB de 9 pines conforme a la norma.
[X4] N.º de pin Denominación Valor Descripción
1 – – No asignado
6 CAN-GND – Masa
2 CAN L – Señal CAN negada (Dominant Low)
7 CAN H – Señal CAN positiva (Dominant High)
3 CAN-GND – Masa
8 – – No asignado
4 – – No asignado
9 – – No asignado
5 CAN-Shield – Blindaje
Tab. 2.1 Asignación de clavijas de la interfaz CAN [X4]
Cableado del bus CANAl cablear el controlador del motor mediante el bus CAN deben observarse obligator
iamente la información y las indicaciones siguientes para que el sistema sea estable y no
tenga fallos.
Si el cableado no se realiza correctamente, durante el funcionamiento pueden aparecer
averías en el bus CAN a causa de las cuales el controlador de motor, por motivos de
seguridad, se apagará con un error.
TerminaciónEn caso necesario se puede conectar una resistencia de terminación (120 Ω) por medio del microinte
rruptor S2 = 1 (CAN Term) de la unidad básica.
2.2.2 Instrucciones para el cableadoEl bus CAN ofrece una posibilidad sencilla y sin interferencias para la interconexión de todos los com
ponentes de una instalación. Para ello es requisito indispensable observar todas las instrucciones de
cableado indicadas a continuación.
2 CANopen [X4]
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 13
120 Ω 120 Ω
CAN-Shield
CAN-GND
CAN L
CAN H
CAN-Shield
CAN-GND
CAN L
CAN H
CAN-Shield
CAN-GND
CAN L
CAN H
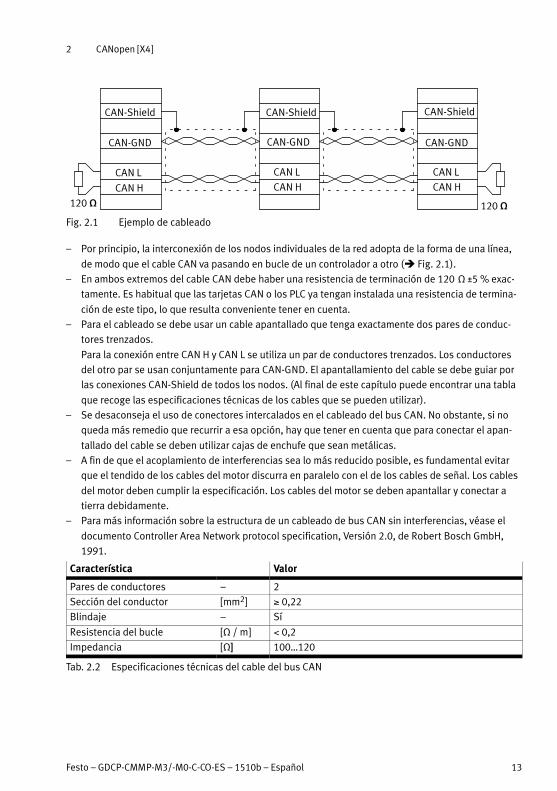
Fig. 2.1 Ejemplo de cableado
– Por principio, la interconexión de los nodos individuales de la red adopta de la forma de una línea,
de modo que el cable CAN va pasando en bucle de un controlador a otro (� Fig. 2.1).
– En ambos extremos del cable CAN debe haber una resistencia de terminación de 120 Ω ±5 % exac
tamente. Es habitual que las tarjetas CAN o los PLC ya tengan instalada una resistencia de termina
ción de este tipo, lo que resulta conveniente tener en cuenta.
– Para el cableado se debe usar un cable apantallado que tenga exactamente dos pares de conduc
tores trenzados.
Para la conexión entre CAN H y CAN L se utiliza un par de conductores trenzados. Los conductores
del otro par se usan conjuntamente para CAN-GND. El apantallamiento del cable se debe guiar por
las conexiones CAN-Shield de todos los nodos. (Al final de este capítulo puede encontrar una tabla
que recoge las especificaciones técnicas de los cables que se pueden utilizar).
– Se desaconseja el uso de conectores intercalados en el cableado del bus CAN. No obstante, si no
queda más remedio que recurrir a esa opción, hay que tener en cuenta que para conectar el apan
tallado del cable se deben utilizar cajas de enchufe que sean metálicas.
– A fin de que el acoplamiento de interferencias sea lo más reducido posible, es fundamental evitar
que el tendido de los cables del motor discurra en paralelo con el de los cables de señal. Los cables
del motor deben cumplir la especificación. Los cables del motor se deben apantallar y conectar a
tierra debidamente.
– Para más información sobre la estructura de un cableado de bus CAN sin interferencias, véase el
documento Controller Area Network protocol specification, Versión 2.0, de Robert Bosch GmbH,
1991.
Característica Valor
Pares de conductores – 2
Sección del conductor [mm2] 0,22
Blindaje – Sí
Resistencia del bucle [Ω / m] 0,2
Impedancia [Ω] 100…120
Tab. 2.2 Especificaciones técnicas del cable del bus CAN
2 CANopen [X4]
14 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
2.3 Configuración del participante CANopen en el CMMP-AS-...-M3
M3Esta sección solo es válida para el controlador de motor CMMP-AS-…-M3.
Para crear una interfaz CANopen operativa son necesarios varios pasos. Algunos de los ajustes deben
realizarse antes de la activación de la comunicación CANopen. Esta sección ofrece un resumen de los
pasos necesarios por parte del slave para la parametrización y configuración. Dado que algunos
parámetros sólo son efectivos después de guardar y resetear el controlador, se recomienda realizar
primero la puesta a punto con el FCT sin conexión con el bus CANopen.
Hallará indicaciones respecto a la puesta a punto con el Festo Configuration Tool en la
ayuda del plugin FCT específico del equipo.
Por eso al planificar el proyecto para la interfaz CANopen el usuario debe definir estas determinacio
nes. Solo después debe realizarse la parametrización de la conexión del bus de campo en ambos lados.
Se recomienda realizar primero la parametrización del slave. Después se configura el master.
Se recomienda proceder de la manera siguiente:
1. Ajuste del desplazamiento del número de nodo, de la tasa de bits y activación de la comunicación
de bus mediante microinterruptores.
El estado de los microinterruptores se lee una única vez cuando se produce el
Power ON / RESET.
Los cambios en las posiciones de los interruptores durante el funcionamiento únicamente
son efectivos para el CMMP-AS en el siguiente RESET o nuevo arranque.
2. Parametrización y puesta a punto con la Festo Configuration Tool (FCT).
En particular en la página Datos de la aplicación:
– Interfaz de control CANopen (registro Selección del modo de servicio)
Además los siguientes ajustes en la página Bus de campo:
– dirección de base del número de nodo
– protocolo CANopen DS 402 (registro Parámetros de funcionamiento)
– unidades físicas (registro Grupo de factores)
Tenga en cuenta que después de un reset la parametrización de las funciones CANopen
solo se mantiene si se ha memorizado el conjunto de parámetros del controlador de
motor.
Mientras el mando del equipo FCT está activado, se desactiva automáticamente la
comunicación CAN.
3. Configuración del master CANopen � secciones 2.5 y 3.
2 CANopen [X4]
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 15
2.3.1 Ajuste del número de nodo con microinterruptores y FCTLa activación de la interfaz CAN con el protocolo CANopen, así como el ajuste del número de nodo y la
velocidad de transmisión, se realiza una única vez con el interruptor DIP del controlador del motor.
El número de nodo se puede ajustar con los microinterruptores 1…5 del módulo situado en la posición
de enchufe Ext3, o bien en el programa FCT.
El número de nodo resultante está compuesto por la dirección base (FCT) y el desplaza
miento (microinterruptor).
Los valores admisibles para el número de nodo se encuentran en el margen de 1…127.
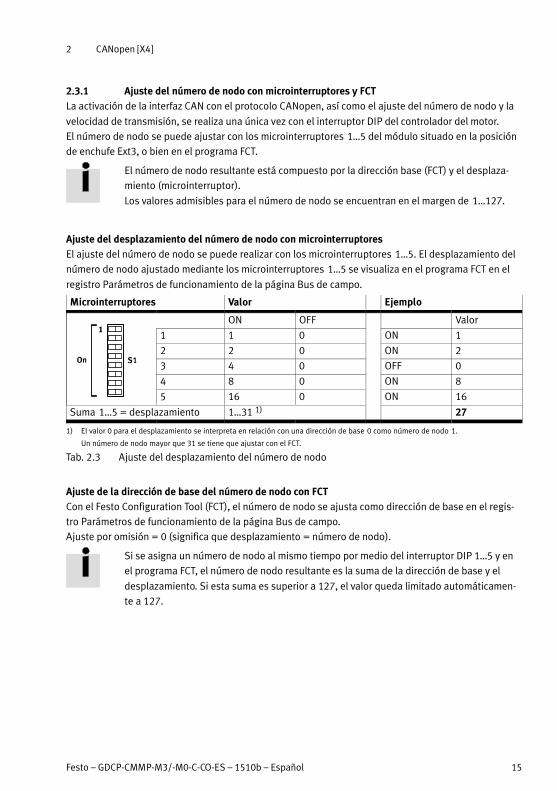
Ajuste del desplazamiento del número de nodo con microinterruptoresEl ajuste del número de nodo se puede realizar con los microinterruptores 1…5. El desplazamiento del
número de nodo ajustado mediante los microinterruptores 1…5 se visualiza en el programa FCT en el
registro Parámetros de funcionamiento de la página Bus de campo.
Microinterruptores Valor Ejemplo
ON OFF Valor
1 1 0 ON 1
2 2 0 ON 2
3 4 0 OFF 0
4 8 0 ON 8
5 16 0 ON 16
Suma 1…5 = desplazamiento 1…31 1) 27
1) El valor 0 para el desplazamiento se interpreta en relación con una dirección de base 0 como número de nodo 1.
Un número de nodo mayor que 31 se tiene que ajustar con el FCT.
Tab. 2.3 Ajuste del desplazamiento del número de nodo
Ajuste de la dirección de base del número de nodo con FCTCon el Festo Configuration Tool (FCT), el número de nodo se ajusta como dirección de base en el regis
tro Parámetros de funcionamiento de la página Bus de campo.
Ajuste por omisión = 0 (significa que desplazamiento = número de nodo).
Si se asigna un número de nodo al mismo tiempo por medio del interruptor DIP 1…5 y en
el programa FCT, el número de nodo resultante es la suma de la dirección de base y el
desplazamiento. Si esta suma es superior a 127, el valor queda limitado automáticamen
te a 127.
2 CANopen [X4]
16 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
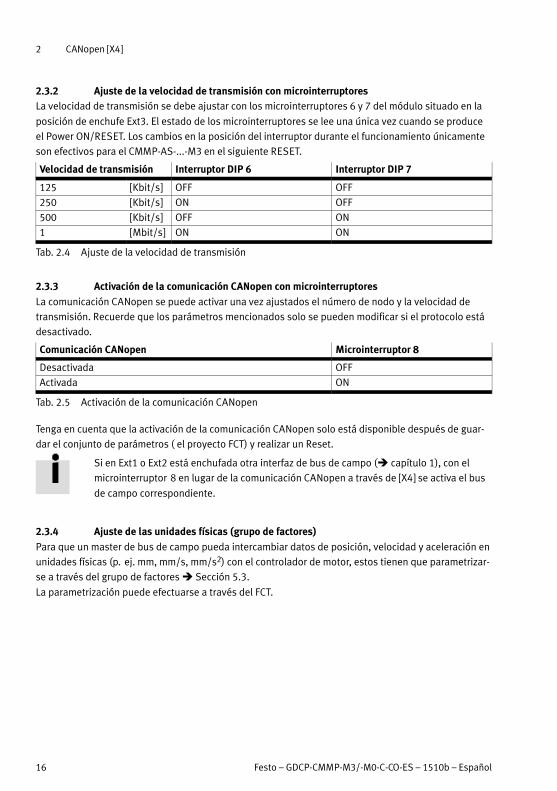
2.3.2 Ajuste de la velocidad de transmisión con microinterruptoresLa velocidad de transmisión se debe ajustar con los microinterruptores 6 y 7 del módulo situado en la
posición de enchufe Ext3. El estado de los microinterruptores se lee una única vez cuando se produce
el Power ON/RESET. Los cambios en la posición del interruptor durante el funcionamiento únicamente
son efectivos para el CMMP-AS-...-M3 en el siguiente RESET.
Velocidad de transmisión Interruptor DIP 6 Interruptor DIP 7
125 [Kbit/s] OFF OFF
250 [Kbit/s] ON OFF
500 [Kbit/s] OFF ON
1 [Mbit/s] ON ON
Tab. 2.4 Ajuste de la velocidad de transmisión
2.3.3 Activación de la comunicación CANopen con microinterruptores
La comunicación CANopen se puede activar una vez ajustados el número de nodo y la velocidad de
transmisión. Recuerde que los parámetros mencionados solo se pueden modificar si el protocolo está
desactivado.
Comunicación CANopen Microinterruptor 8
Desactivada OFF
Activada ON
Tab. 2.5 Activación de la comunicación CANopen
Tenga en cuenta que la activación de la comunicación CANopen solo está disponible después de guar
dar el conjunto de parámetros ( el proyecto FCT) y realizar un Reset.
Si en Ext1 o Ext2 está enchufada otra interfaz de bus de campo (� capítulo 1), con el
microinterruptor 8 en lugar de la comunicación CANopen a través de [X4] se activa el bus
de campo correspondiente.
2.3.4 Ajuste de las unidades físicas (grupo de factores)
Para que un master de bus de campo pueda intercambiar datos de posición, velocidad y aceleración en
unidades físicas (p. ej. mm, mm/s, mm/s2) con el controlador de motor, estos tienen que parametrizar
se a través del grupo de factores � Sección 5.3.
La parametrización puede efectuarse a través del FCT.

2 CANopen [X4]
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 17
2.4 Configuración del participante CANopen en el CMMP-AS-...-M0
M0Esta sección solo es válida para el controlador de motor CMMP-AS-…-M0.
Para crear una interfaz CANopen operativa son necesarios varios pasos. Algunos de los ajustes deben
realizarse antes de la activación de la comunicación CANopen. Esta sección ofrece un resumen de los
pasos necesarios por parte del slave para la parametrización y configuración.
Hallará indicaciones respecto a la puesta a punto con el Festo Configuration Tool en la
ayuda del plugin FCT específico del dispositivo.
Por eso al planificar el proyecto para la interfaz CANopen el usuario debe definir estas determinacio
nes. Solo después debe realizarse la parametrización de la conexión del bus de campo en ambos lados.
Se recomienda realizar primero la parametrización del slave. Después se configura el master.
Los ajustes de los parámetros específicos del bus CAN se pueden efectuar de dos modos. Estos dos
modos están separados y se conmuta entre ellos mediante la opción “Parametrización de bus de
campo mediante DINs” en la página “Datos de la aplicación” en FCT.
En estado de entrega y después de restablecer los ajustes de fábrica está activada la opción
“Parametrización de bus de campo mediante DINs”. Por ello no es obligatoriamente necesario realizar
una parametrización con FCT para activar el bus CAN.
Los siguientes parámetros se pueden ajustar mediante DINs o FCT:
Parámetro Ajuste mediante
DIN FCT
Número de nodo 0 … 3 1) Página “Bus de campo”, parámetros de funcionamiento.
La activación del bus CAN se realiza automáticamente
por el FCT (en función del mando del equipo):
– Mando del equipo en FCT } CAN desactivado
– Mando del equipo cedido } CAN activado
Velocidad de transmisión
(bitrate)
12, 13 1)
Activación 8
Protocolo (perfil de datos) 9 2)
1) Se acepta solo cuando la comunicación CAN está inactiva
2) Se acepta solo después de un RESET del equipo
Tab. 2.6 Cuadro general del ajuste de los parámetros CAN mediante DINs o FCT
2 CANopen [X4]
18 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
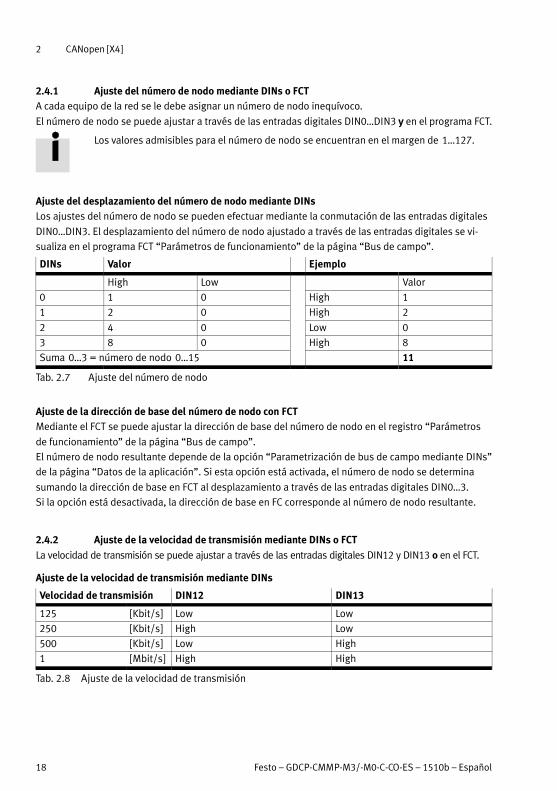
2.4.1 Ajuste del número de nodo mediante DINs o FCTA cada equipo de la red se le debe asignar un número de nodo inequívoco.
El número de nodo se puede ajustar a través de las entradas digitales DIN0…DIN3 y en el programa FCT.
Los valores admisibles para el número de nodo se encuentran en el margen de 1…127.
Ajuste del desplazamiento del número de nodo mediante DINsLos ajustes del número de nodo se pueden efectuar mediante la conmutación de las entradas digitales
DIN0…DIN3. El desplazamiento del número de nodo ajustado a través de las entradas digitales se vi
sualiza en el programa FCT “Parámetros de funcionamiento” de la página “Bus de campo”.
DINs Valor Ejemplo
High Low Valor
0 1 0 High 1
1 2 0 High 2
2 4 0 Low 0
3 8 0 High 8
Suma 0…3 = número de nodo 0…15 11
Tab. 2.7 Ajuste del número de nodo
Ajuste de la dirección de base del número de nodo con FCTMediante el FCT se puede ajustar la dirección de base del número de nodo en el registro “Parámetros
de funcionamiento” de la página “Bus de campo”.
El número de nodo resultante depende de la opción “Parametrización de bus de campo mediante DINs”
de la página “Datos de la aplicación”. Si esta opción está activada, el número de nodo se determina
sumando la dirección de base en FCT al desplazamiento a través de las entradas digitales DIN0…3.
Si la opción está desactivada, la dirección de base en FC corresponde al número de nodo resultante.
2.4.2 Ajuste de la velocidad de transmisión mediante DINs o FCT
La velocidad de transmisión se puede ajustar a través de las entradas digitales DIN12 y DIN13 o en el FCT.
Ajuste de la velocidad de transmisión mediante DINs
Velocidad de transmisión DIN12 DIN13
125 [Kbit/s] Low Low
250 [Kbit/s] High Low
500 [Kbit/s] Low High
1 [Mbit/s] High High
Tab. 2.8 Ajuste de la velocidad de transmisión
2 CANopen [X4]
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 19
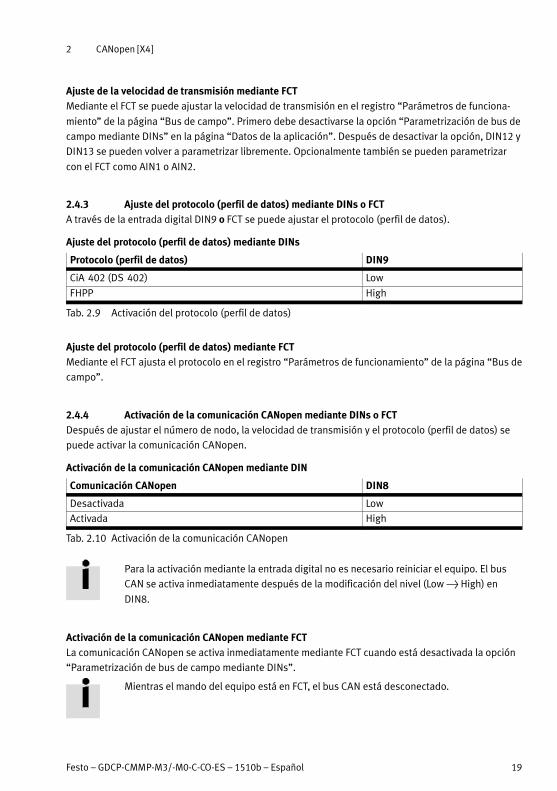
Ajuste de la velocidad de transmisión mediante FCTMediante el FCT se puede ajustar la velocidad de transmisión en el registro “Parámetros de funciona
miento” de la página “Bus de campo”. Primero debe desactivarse la opción “Parametrización de bus de
campo mediante DINs” en la página “Datos de la aplicación”. Después de desactivar la opción, DIN12 y
DIN13 se pueden volver a parametrizar libremente. Opcionalmente también se pueden parametrizar
con el FCT como AIN1 o AIN2.
2.4.3 Ajuste del protocolo (perfil de datos) mediante DINs o FCTA través de la entrada digital DIN9 o FCT se puede ajustar el protocolo (perfil de datos).
Ajuste del protocolo (perfil de datos) mediante DINs
Protocolo (perfil de datos) DIN9
CiA 402 (DS 402) Low
FHPP High
Tab. 2.9 Activación del protocolo (perfil de datos)
Ajuste del protocolo (perfil de datos) mediante FCTMediante el FCT ajusta el protocolo en el registro “Parámetros de funcionamiento” de la página “Bus de
campo”.
2.4.4 Activación de la comunicación CANopen mediante DINs o FCTDespués de ajustar el número de nodo, la velocidad de transmisión y el protocolo (perfil de datos) se
puede activar la comunicación CANopen.
Activación de la comunicación CANopen mediante DIN
Comunicación CANopen DIN8
Desactivada Low
Activada High
Tab. 2.10 Activación de la comunicación CANopen
Para la activación mediante la entrada digital no es necesario reiniciar el equipo. El bus
CAN se activa inmediatamente después de la modificación del nivel (Low } High) en
DIN8.
Activación de la comunicación CANopen mediante FCTLa comunicación CANopen se activa inmediatamente mediante FCT cuando está desactivada la opción
“Parametrización de bus de campo mediante DINs”.
Mientras el mando del equipo está en FCT, el bus CAN está desconectado.

2 CANopen [X4]
20 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
2.4.5 Ajuste de las unidades físicas (grupo de factores)Para que un master de bus de campo pueda intercambiar datos de posición, velocidad y aceleración en
unidades físicas (p. ej. mm, mm/s, mm/s2) con el controlador de motor, estos tienen que parametrizar
se a través del grupo de factores � Sección 5.3.
La parametrización puede efectuarse a través del FCT.
2.5 Configuración de master CANopen
Para la configuración del master CANopen puede utilizar un archivo EDS.
El archivo EDS está incluido en el CD-ROM suministrado con el controlador de motor.
Hallará las versiones más actuales en � www.festo.com/sp
Archivos EDS Descripción
CMMP-AS-...-M3.eds Controlador de motor CMMP-AS-...-M3 con protocolo “CiA402 (DS402)”
CMMP-AS-...-M0.eds Controlador de motor CMMP-AS-...-M0 con protocolo “CiA402 (DS402)”
Tab. 2.11 Archivos EDS para CANopen
3 Método de acceso CANopen
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 21
3 Método de acceso CANopen
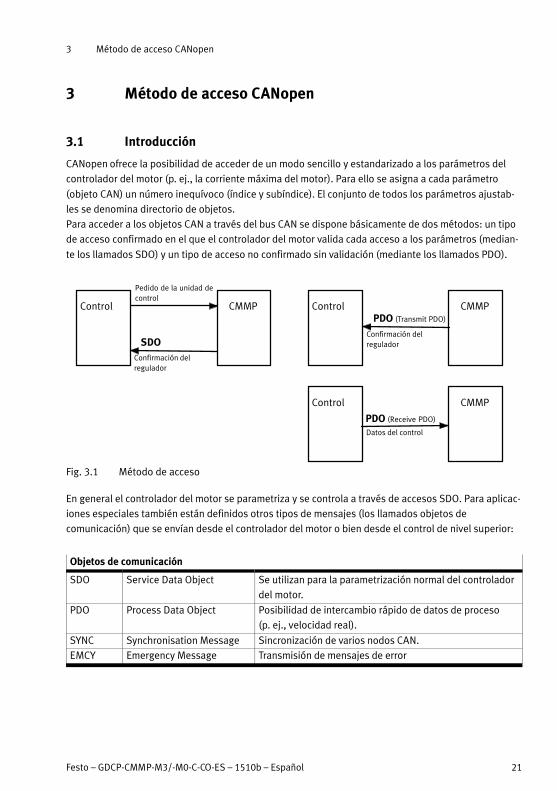
3.1 Introducción
CANopen ofrece la posibilidad de acceder de un modo sencillo y estandarizado a los parámetros del
controlador del motor (p. ej., la corriente máxima del motor). Para ello se asigna a cada parámetro
(objeto CAN) un número inequívoco (índice y subíndice). El conjunto de todos los parámetros ajustab
les se denomina directorio de objetos.
Para acceder a los objetos CAN a través del bus CAN se dispone básicamente de dos métodos: un tipo
de acceso confirmado en el que el controlador del motor valida cada acceso a los parámetros (median
te los llamados SDO) y un tipo de acceso no confirmado sin validación (mediante los llamados PDO).
Confirmación delregulador
Pedido de la unidad decontrol
Control CMMP
SDOConfirmación delregulador
Control CMMPPDO (Transmit PDO)
Datos del control
Control CMMP
PDO (Receive PDO)
Fig. 3.1 Método de acceso
En general el controlador del motor se parametriza y se controla a través de accesos SDO. Para aplicac
iones especiales también están definidos otros tipos de mensajes (los llamados objetos de
comunicación) que se envían desde el controlador del motor o bien desde el control de nivel superior:
Objetos de comunicación
SDO Service Data Object Se utilizan para la parametrización normal del controlador
del motor.
PDO Process Data Object Posibilidad de intercambio rápido de datos de proceso
(p. ej., velocidad real).
SYNC Synchronisation Message Sincronización de varios nodos CAN.
EMCY Emergency Message Transmisión de mensajes de error

3 Método de acceso CANopen
22 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Objetos de comunicación
NMT Network Management Servicio de red: se puede actuar, p. ej., sobre todos los
nodos CAN simultáneamente.
HEART
BEAT
Error Control Protocol Control de los participantes en la comunicación mediante
mensajes periódicos.
Tab. 3.1 Objetos de comunicación
Cada mensaje que se envía al bus CAN contiene un tipo de dirección que permite determinar a qué
participante del bus va dirigido el mensaje. Ese número se denomina identificador. Cuanto más bajo
sea el identificador mayor es la prioridad del mensaje. Los objetos de comunicación mencionados an
teriormente tienen definido su identificador correspondiente. El esquema siguiente muestra la estruc
tura básica de un mensaje CANopen:
601h Len D0 D1 D2 D3 D4 D5 D6 D7
Identificador
Bytes de datos 0… 7
Número de bytes de datos (aquí 8)
3.2 Acceso SDO
Los Service Data Objects (SDO) permiten acceder al directorio de objetos del controlador del motor.
Este acceso es especialmente sencillo y claro. Por eso se recomienda crear la aplicación primero sólo
con los SDO y posteriormente ajustar algunos accesos de objetos a los Process Data Objects (PDO),
más rápidos pero también más complicados.
El acceso a los SDO se efectúa siempre desde un control de nivel superior (host). Éste envía al con
trolador del motor una orden de escritura para modificar un parámetro del directorio de objetos, o bien
una orden de lectura para leer un parámetro. Para cada orden el host recibe una respuesta que con
tiene el valor leído o que, si se trata de una orden de escritura, hace las veces de validación.
Para que el controlador del motor reconozca que la orden va dirigida a él, el host debe enviar la orden
con un identificador determinado. Éste está compuesto por la base 600h + el número de nodo del con
trolador del motor en cuestión. El controlador del motor responde con el identificador 580h + el número
de nodo.
La estructura de las órdenes y de las respuestas depende del tipo de datos del objeto que se desea
leer o escribir, ya que se deben enviar o recibir 1, 2 o 4 bytes de datos. Son compatibles los tipos de
datos siguientes:
3 Método de acceso CANopen
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 23
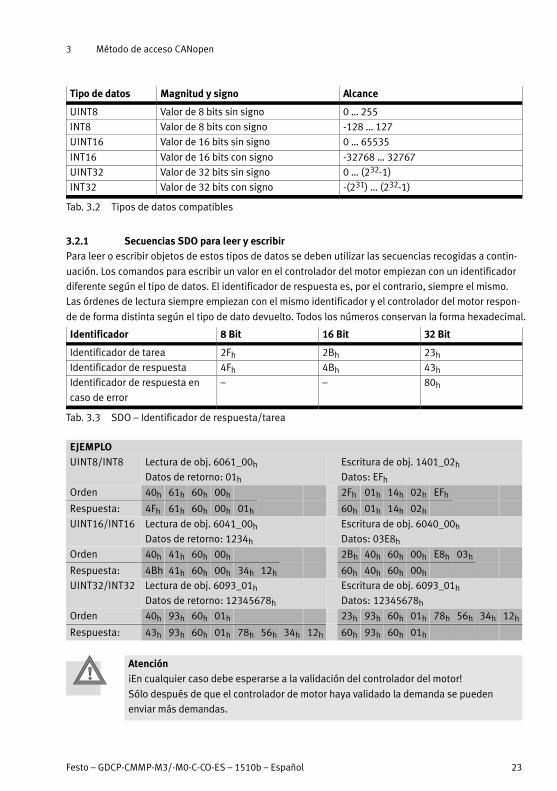
Tipo de datos Magnitud y signo Alcance
UINT8 Valor de 8 bits sin signo 0 … 255
INT8 Valor de 8 bits con signo -128 … 127
UINT16 Valor de 16 bits sin signo 0 … 65535
INT16 Valor de 16 bits con signo -32768 … 32767
UINT32 Valor de 32 bits sin signo 0 … (232-1)
INT32 Valor de 32 bits con signo -(231) … (232-1)
Tab. 3.2 Tipos de datos compatibles
3.2.1 Secuencias SDO para leer y escribirPara leer o escribir objetos de estos tipos de datos se deben utilizar las secuencias recogidas a contin
uación. Los comandos para escribir un valor en el controlador del motor empiezan con un identificador
diferente según el tipo de datos. El identificador de respuesta es, por el contrario, siempre el mismo.
Las órdenes de lectura siempre empiezan con el mismo identificador y el controlador del motor respon
de de forma distinta según el tipo de dato devuelto. Todos los números conservan la forma hexadecimal.
Identificador 8 Bit 16 Bit 32 Bit
Identificador de tarea 2Fh 2Bh 23h
Identificador de respuesta 4Fh 4Bh 43h
Identificador de respuesta en
caso de error
– – 80h
Tab. 3.3 SDO – Identificador de respuesta/tarea
EJEMPLOUINT8/INT8 Lectura de obj. 6061_00h
Datos de retorno: 01h
Escritura de obj. 1401_02h
Datos: EFh
Orden 40h 61h 60h 00h 2Fh 01h 14h 02h EFh
Respuesta: 4Fh 61h 60h 00h 01h 60h 01h 14h 02h
UINT16/INT16 Lectura de obj. 6041_00h
Datos de retorno: 1234h
Escritura de obj. 6040_00h
Datos: 03E8h
Orden 40h 41h 60h 00h 2Bh 40h 60h 00h E8h 03h
Respuesta: 4Bh 41h 60h 00h 34h 12h 60h 40h 60h 00h
UINT32/INT32 Lectura de obj. 6093_01h
Datos de retorno: 12345678h
Escritura de obj. 6093_01h
Datos: 12345678h
Orden 40h 93h 60h 01h 23h 93h 60h 01h 78h 56h 34h 12h
Respuesta: 43h 93h 60h 01h 78h 56h 34h 12h 60h 93h 60h 01h
Atención¡En cualquier caso debe esperarse a la validación del controlador del motor!
Sólo después de que el controlador de motor haya validado la demanda se pueden
enviar más demandas.
3 Método de acceso CANopen
24 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
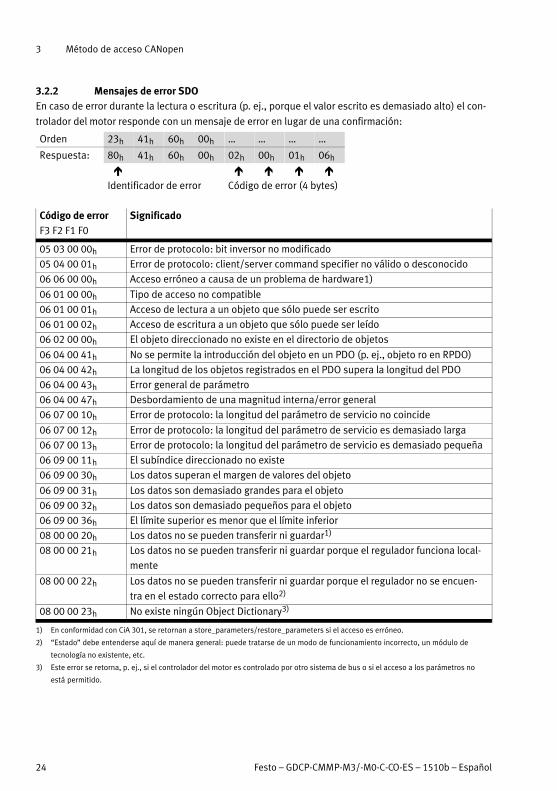
3.2.2 Mensajes de error SDOEn caso de error durante la lectura o escritura (p. ej., porque el valor escrito es demasiado alto) el con
trolador del motor responde con un mensaje de error en lugar de una confirmación:
Orden 23h 41h 60h 00h … … … …
Respuesta: 80h 41h 60h 00h 02h 00h 01h 06h
� � � � �
Identificador de error Código de error (4 bytes)
Código de errorF3 F2 F1 F0
Significado
05 03 00 00h Error de protocolo: bit inversor no modificado
05 04 00 01h Error de protocolo: client/server command specifier no válido o desconocido
06 06 00 00h Acceso erróneo a causa de un problema de hardware1)
06 01 00 00h Tipo de acceso no compatible
06 01 00 01h Acceso de lectura a un objeto que sólo puede ser escrito
06 01 00 02h Acceso de escritura a un objeto que sólo puede ser leído
06 02 00 00h El objeto direccionado no existe en el directorio de objetos
06 04 00 41h No se permite la introducción del objeto en un PDO (p. ej., objeto ro en RPDO)
06 04 00 42h La longitud de los objetos registrados en el PDO supera la longitud del PDO
06 04 00 43h Error general de parámetro
06 04 00 47h Desbordamiento de una magnitud interna/error general
06 07 00 10h Error de protocolo: la longitud del parámetro de servicio no coincide
06 07 00 12h Error de protocolo: la longitud del parámetro de servicio es demasiado larga
06 07 00 13h Error de protocolo: la longitud del parámetro de servicio es demasiado pequeña
06 09 00 11h El subíndice direccionado no existe
06 09 00 30h Los datos superan el margen de valores del objeto
06 09 00 31h Los datos son demasiado grandes para el objeto
06 09 00 32h Los datos son demasiado pequeños para el objeto
06 09 00 36h El límite superior es menor que el límite inferior
08 00 00 20h Los datos no se pueden transferir ni guardar1)
08 00 00 21h Los datos no se pueden transferir ni guardar porque el regulador funciona local
mente
08 00 00 22h Los datos no se pueden transferir ni guardar porque el regulador no se encuen
tra en el estado correcto para ello2)
08 00 00 23h No existe ningún Object Dictionary3)
1) En conformidad con CiA 301, se retornan a store_parameters/restore_parameters si el acceso es erróneo.
2) “Estado” debe entenderse aquí de manera general: puede tratarse de un modo de funcionamiento incorrecto, un módulo de
tecnología no existente, etc.
3) Este error se retorna, p. ej., si el controlador del motor es controlado por otro sistema de bus o si el acceso a los parámetros no
está permitido.
3 Método de acceso CANopen
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 25
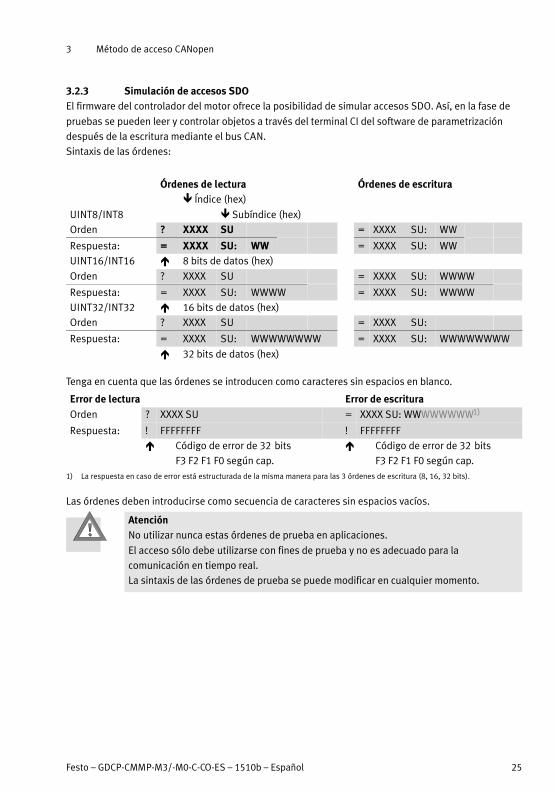
3.2.3 Simulación de accesos SDOEl firmware del controlador del motor ofrece la posibilidad de simular accesos SDO. Así, en la fase de
pruebas se pueden leer y controlar objetos a través del terminal CI del software de parametrización
después de la escritura mediante el bus CAN.
Sintaxis de las órdenes:
Órdenes de lectura Órdenes de escritura� Índice (hex)
UINT8/INT8 � Subíndice (hex)
Orden ? XXXX SU = XXXX SU: WW
Respuesta: = XXXX SU: WW = XXXX SU: WW
UINT16/INT16 � 8 bits de datos (hex)
Orden ? XXXX SU = XXXX SU: WWWW
Respuesta: = XXXX SU: WWWW = XXXX SU: WWWW
UINT32/INT32 � 16 bits de datos (hex)
Orden ? XXXX SU = XXXX SU:
Respuesta: = XXXX SU: WWWWWWWW = XXXX SU: WWWWWWWW
� 32 bits de datos (hex)
Tenga en cuenta que las órdenes se introducen como caracteres sin espacios en blanco.
Error de lectura Error de escritura
Orden ? XXXX SU = XXXX SU: WWWWWWWW1)
Respuesta: ! FFFFFFFF ! FFFFFFFF
� Código de error de 32 bits
F3 F2 F1 F0 según cap.
� Código de error de 32 bits
F3 F2 F1 F0 según cap.1) La respuesta en caso de error está estructurada de la misma manera para las 3 órdenes de escritura (8, 16, 32 bits).
Las órdenes deben introducirse como secuencia de caracteres sin espacios vacíos.
AtenciónNo utilizar nunca estas órdenes de prueba en aplicaciones.
El acceso sólo debe utilizarse con fines de prueba y no es adecuado para la
comunicación en tiempo real.
La sintaxis de las órdenes de prueba se puede modificar en cualquier momento.
3 Método de acceso CANopen
26 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
3.3 PDO-Message
Los ProcessDataObjects (PDO) permiten transmitir datos en función de eventos o bien cíclicamente.
El PDO transfiere uno o varios parámetros determinados previamente. A diferencia de un SDO, cuando
se transfiere un PDO no hay acuse de recibo. Por ello, después de activar el PDO todos los receptores
deben poder procesar en todo momento los PDO que puedan recibir. En general esto significa que el
software necesario en el ordenador host es considerable. Este inconveniente se compensa con la ven
taja de que el ordenador host no necesita consultar cíclicamente los parámetros transferidos a través
de un PDO, lo que reduce en gran medida la carga del bus CAN.
EJEMPLOEl ordenador host desea saber cuándo el controlador del motor ha concluido un posicionamiento de
A a B.
Si se utilizan SDO, el host debe consultar continuamente, por ejemplo cada milisegundo, el objeto
statusword, lo que supone una carga notable de la capacidad del bus.
Si se utiliza un PDO, el controlador del motor se parametriza desde el inicio de la aplicación para que,
a cada cambio del objeto statusword, inicie un PDO que contenga el objeto statusword.
En lugar de efectuar consultas continuamente, el mensaje correspondiente se envía automáticamen
te al ordenador host en cuanto se produce el evento.
Se distinguen los tipos de PDO siguientes:
Tipo Recorrido Observación
Transmit PDO Controlador del motor � host El controlador del motor envía el PDO
cuando ocurre un evento determinado.
Receive PDO Host � controlador del motor El controlador del motor evalúa el PDO
cuando ocurre un evento determinado.
Tab. 3.4 Tipos de PDO
El controlador de motor dispone de cuatro Transmit PDO y cuatro Receive PDO.
En los PDO se pueden introducir (mapear) casi todos los objetos del directorio de objetos, es decir, el
PDO contiene como datos, p. ej. el valor real de velocidad, el valor real de posición, etc. Debe
comunicarse previamente al controlador del motor qué datos se transfieren, ya que el PDO sólo con
tiene datos útiles, no información sobre el tipo de parámetro. En el ejemplo siguiente, el valor real de
posición se ha transferido a los bytes de datos 0 … 3 del PDO y el valor real de velocidad a los by
tes 4 … 7.

3 Método de acceso CANopen
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 27
601h Len D0 D1 D2 D3 D4 D5 D6 D7
Identificador
Inicio del valor real dela posición (D0 … D3)
Número de bytes de datos (aquí 8)
Inicio del valor real del númerode revoluciones (D4 … D7)
De este modo se puede definir casi cualquier telegrama de datos. Los siguientes capítulos describen
los ajustes necesarios para ello.
3.3.1 Descripción de los objetos
Objeto Observación
COB_ID_used_by_PDO En el objeto COB_ID_used_by_PDO se debe introducir el identificador
al que se debe enviar el PDO correspondiente o el que debe recibirlo.
Si bit 31 está activo, significa que el PDO correspondiente está desac
tivado. Es el valor predeterminado para todos los PDO.
Únicamente se permite modificar el COB-ID si el PDO está desac
tivado, es decir, si el bit 31 está activo. De ahí que sólo se permita
escribir un identificador distinto del ajustado actualmente en el
regulador si el bit 31 está activo al mismo tiempo.
Si el bit 30 está activo cuando se lee el identificador, indica que el
objeto no se puede consultar por medio de una trama remota. Este
bit se ignora durante la escritura y siempre está activo durante la
lecturanumber_of_mapped_objects Este objeto indica cuántos objetos se deben mapear en el PDO cor
respondiente. Se deben tener en cuenta las restricciones siguientes:
Por cada PDO se pueden mapear 4 objetos como máximo
Un PDO puede tener como máximo 64 bits (8 bytes).
first_mapped_object …
fourth_mapped_object
Para cada objeto que se deba incluir en el PDO, se debe comunicar al
controlador del motor el índice, el subíndice y la longitud correspon
dientes. La especificación de la longitud debe coincidir con la del
Object Dictionary. No es posible mapear partes de un objeto.
La información de mapeado presenta el formato siguiente � Tab. 3.6
transmission_type e
inhibit_time
Para cada PDO se puede determinar qué evento provoca el envío
(Transmit PDO) o la evaluación (Receive PDO) de un mensaje.
� Tab. 3.7

3 Método de acceso CANopen
28 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Objeto Observación
Transmit_mask_high y
transmit_mask_low
Si se selecciona “Modificación” como transmission_type, el TPDO se
envía siempre que al menos 1 bit del TPDO varía. No obstante, a
menudo es necesario que el TPDO sólo se envíe cuando varían ciertos
bits. De ahí que el TPDO se pueda dotar de una máscara: para evaluar
si el PDO ha variado, sólo se tendrán en cuenta los bits del TPDO que
estén activados a “1” en la máscara. Dado que esta función es es
pecífica del fabricante, el valor predeterminado de todos los bits de
las máscaras está activado.
Tab. 3.5 Descripción de los objetos
xxx_mapped_object
Índice principal (hex) [Bit] 16
Subíndice (hex) [Bit] 8
Longitud del objeto (hex) [Bit] 8
Tab. 3.6 Formato de la información de mapeado
Para simplificar el mapeado se ha determinado el procedimiento siguiente:
1. El número de objetos mapeados se pone a 0.
2. Se autoriza la escritura de los parámetros first_mapped_object … fourth_mapped_object (la lon
gitud total de todos los objetos no resulta relevante en este momento).
3. El número de objetos mapeados se activa con un valor entre 1 … 4. Ahora la longitud de todos estos
objetos no debe ser superior a 64 bits.
Valor Significado Permitido en
01h – F0h SYNC MessageEl valor numérico indica cuántos mensajes SYNC deben haberserecibido antes de que el PDO– sea enviado (T-PDO) o bien– sea evaluado (R-PDO).
TPDO
RPDO
FEh CíclicoEl PDO de transferencia es actualizado y enviado cíclicamente por elcontrolador del motor. El período de tiempo lo determina el objeto inhibit_time.Los Receive PDO, en cambio, son evaluados inmediatamente despuésde su recepción.
TPDO
(RPDO)
FFh CambioEl PDO de transferencia se envía cuando en los datos del PDO se hamodificado como mínimo 1 bit.Además, con inhibit_time se puede determinar la distancia mínimaentre los envíos de dos PDO en pasos de 100 μs.
TPDO
Tab. 3.7 Tipo de transmisión
No está permitido el uso de todos los demás valores.

3 Método de acceso CANopen
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 29
EJEMPLOLos objetos siguientes se deben transferir conjuntamente en un PDO:
Nombre del objeto Índice_Subíndice Significado
statusword 6041h_00h Control del controlador
modes_of_operation_display 6061h_00h Modo de funcionamiento
digital_inputs 60FDh_00h Entradas digitales
Se debe utilizar el primer Transmit PDO (TPDO 1), que se debe enviar siempre que cambia una de las
entradas digitales pero cada 10 ms como máximo. El identificador que se debe utilizar para este PDO
es el 187h.
1. Desactivar PDO
Si el PDO está activado, primero debe desactivarse.
Escritura del identificador con el bit 31 activado
(el PDO está desactivado):
� cob_id_used_by_pdo = C0000187h
2. Borrar número de objetos
Para que el mapeado de objetos se pueda borrar,
el número de objetos se debe poner a cero.
� number_of_mapped_objects = 0
3. Parametrizar los objetos que deben ser mapeados
Los objetos mencionados anteriormente se deben
reunir cada vez en un valor de 32 bits:
Índice
= 6041h
Subíndice
= 00h Longitud = 10h
� first_mapped_object = 60410010h
Índice
= 6061h
Subíndice
= 00h Longitud = 08h
� second_mapped_object = 60610008h
Índice
= 60FDh
Subíndice
= 00h Longitud = 20h
� third_mapped_object = 60FD0020h
4. Parametrizar número de objetos
El PDO debe contener 3 objetos
� number_of_mapped_objects = 3h
5. Parametrizar tipo de transmisión
El PDO debe enviarse en caso de modificación
(de las entradas digitales).
� transmission_type = FFh
A fin de que el envío únicamente sea provocado por
la modificación de las entradas digitales, el PDO se
debe enmascarar de manera que tan sólo “pasen”
los 16 bits del objeto 60FDh.
� transmit_mask_high = 00FFFF00h
� transmit_mask_low = 00000000h
El PDO debe enviarse como máximo cada 10 ms
(100D100 μs).
� inhibit_time = 64h
6. Parametrizar identificador
El PDO se debe enviar con el identificador 187h.
Escribir el identificador nuevo y activar el PDO med
iante el borrado del bit 31:
� cob_id_used_by_pdo = 40000187h
3 Método de acceso CANopen
30 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Tenga en cuenta que, por lo general, la parametrización de los PDO sólo se puede
modificar si el estado de la red (NMT) no es operational. � Capítulo 3.3.3
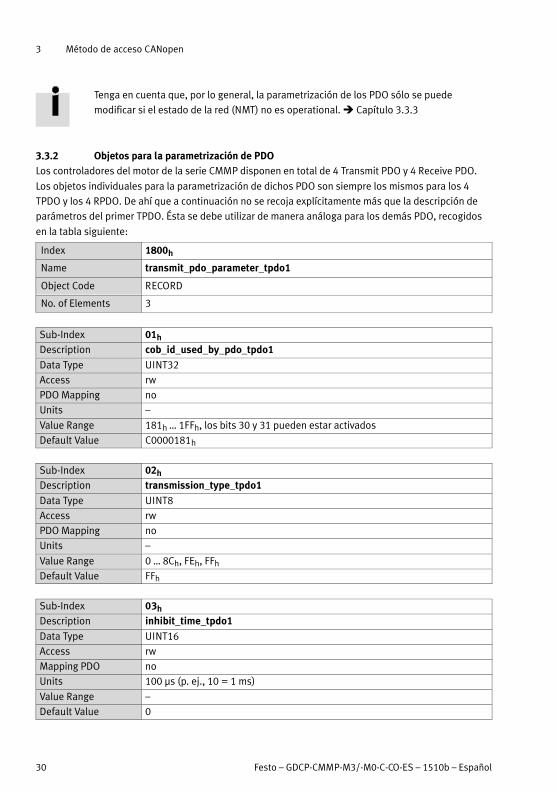
3.3.2 Objetos para la parametrización de PDOLos controladores del motor de la serie CMMP disponen en total de 4 Transmit PDO y 4 Receive PDO.
Los objetos individuales para la parametrización de dichos PDO son siempre los mismos para los 4
TPDO y los 4 RPDO. De ahí que a continuación no se recoja explícitamente más que la descripción de
parámetros del primer TPDO. Ésta se debe utilizar de manera análoga para los demás PDO, recogidos
en la tabla siguiente:
Index 1800h
Name transmit_pdo_parameter_tpdo1
Object Code RECORD
No. of Elements 3
Sub-Index 01h
Description cob_id_used_by_pdo_tpdo1
Data Type UINT32
Access rw
PDO Mapping no
Units –
Value Range 181h … 1FFh, los bits 30 y 31 pueden estar activados
Default Value C0000181h
Sub-Index 02h
Description transmission_type_tpdo1
Data Type UINT8
Access rw
PDO Mapping no
Units –
Value Range 0 … 8Ch, FEh, FFh
Default Value FFh
Sub-Index 03h
Description inhibit_time_tpdo1
Data Type UINT16
Access rw
Mapping PDO no
Units 100 μs (p. ej., 10 = 1 ms)
Value Range –
Default Value 0

3 Método de acceso CANopen
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 31
Index 1A00h
Name transmit_pdo_mapping_tpdo1
Object Code RECORD
No. of Elements 4
Sub-Index 00h
Description number_of_mapped_objects_tpdo1Data Type UINT8
Access rw
PDO Mapping no
Units –
Value Range 0 … 4
Default Value � Tabla
Sub-Index 01h
Description first_mapped_object_tpdo1Data Type UINT32
Access rw
PDO Mapping no
Units –
Value Range –
Default Value � Tabla
Sub-Index 02h
Description second_mapped_object_tpdo1Data Type UINT32
Access rw
PDO Mapping no
Units –
Value Range –
Default Value � Tabla
Sub-Index 03h
Description third_mapped_object_tpdo1Data Type UINT32
Access rw
PDO Mapping no
Units –
Value Range –
Default Value � Tabla

3 Método de acceso CANopen
32 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Sub-Index 04h
Description fourth_mapped_object_tpdo1
Data Type UINT32
Access rw
Mapping PDO no
Units –
Value Range –
Default Value � Tabla
Tenga en cuenta que los grupos de objetos transmit_pdo_parameter_xxx y
transmit_pdo_mapping_xxx únicamente se pueden escribir si el PDO está desactivado
(bit 31 de cob_id_used_by_pdo_xxx activado)
1. Transmit PDO
Index Comment Type Acc. Default Value
1800h_00h number of entries UINT8 ro 03h
1800h_01h COB-ID used by PDO UINT32 rw C0000181h
1800h_02h transmission type UINT8 rw FFh
1800h_03h inhibit time (100 μs) UINT16 rw 0000h
1A00h_00h number of mapped objects UINT8 rw 01h
1A00h_01h first mapped object UINT32 rw 60410010h
1A00h_02h second mapped object UINT32 rw 00000000h
1A00h_03h third mapped object UINT32 rw 00000000h
1A00h_04h fourth mapped object UINT32 rw 00000000h
2. Transmit PDO
Index Comment Type Acc. Default Value
1801h_00h number of entries UINT8 ro 03h
1801h_01h COB-ID used by PDO UINT32 rw C0000281h
1801h_02h transmission type UINT8 rw FFh
1801h_03h inhibit time (100 μs) UINT16 rw 0000h
1A01h_00h number of mapped objects UINT8 rw 02h
1A01h_01h first mapped object UINT32 rw 60410010h
1A01h_02h second mapped object UINT32 rw 60610008h
1A01h_03h third mapped object UINT32 rw 00000000h
1A01h_04h fourth mapped object UINT32 rw 00000000h
3 Método de acceso CANopen
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 33
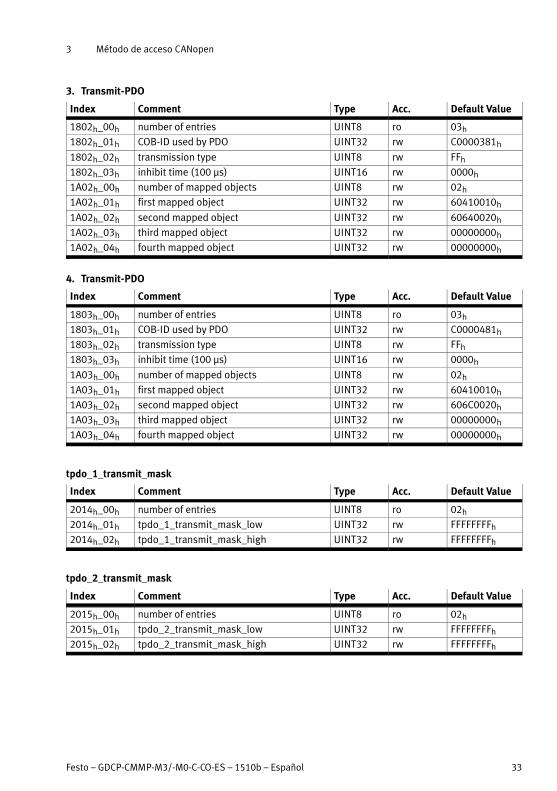
3. Transmit-PDO
Index Comment Type Acc. Default Value
1802h_00h number of entries UINT8 ro 03h
1802h_01h COB-ID used by PDO UINT32 rw C0000381h
1802h_02h transmission type UINT8 rw FFh
1802h_03h inhibit time (100 μs) UINT16 rw 0000h
1A02h_00h number of mapped objects UINT8 rw 02h
1A02h_01h first mapped object UINT32 rw 60410010h
1A02h_02h second mapped object UINT32 rw 60640020h
1A02h_03h third mapped object UINT32 rw 00000000h
1A02h_04h fourth mapped object UINT32 rw 00000000h
4. Transmit-PDO
Index Comment Type Acc. Default Value
1803h_00h number of entries UINT8 ro 03h
1803h_01h COB-ID used by PDO UINT32 rw C0000481h
1803h_02h transmission type UINT8 rw FFh
1803h_03h inhibit time (100 μs) UINT16 rw 0000h
1A03h_00h number of mapped objects UINT8 rw 02h
1A03h_01h first mapped object UINT32 rw 60410010h
1A03h_02h second mapped object UINT32 rw 606C0020h
1A03h_03h third mapped object UINT32 rw 00000000h
1A03h_04h fourth mapped object UINT32 rw 00000000h
tpdo_1_transmit_mask
Index Comment Type Acc. Default Value
2014h_00h number of entries UINT8 ro 02h
2014h_01h tpdo_1_transmit_mask_low UINT32 rw FFFFFFFFh
2014h_02h tpdo_1_transmit_mask_high UINT32 rw FFFFFFFFh
tpdo_2_transmit_mask
Index Comment Type Acc. Default Value
2015h_00h number of entries UINT8 ro 02h
2015h_01h tpdo_2_transmit_mask_low UINT32 rw FFFFFFFFh
2015h_02h tpdo_2_transmit_mask_high UINT32 rw FFFFFFFFh

3 Método de acceso CANopen
34 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
tpdo_3_transmit_mask
Index Comment Type Acc. Default Value
2016h_00h number of entries UINT8 ro 02h
2016h_01h tpdo_3_transmit_mask_low UINT32 rw FFFFFFFFh
2016h_02h tpdo_3_transmit_mask_high UINT32 rw FFFFFFFFh
tpdo_4_transmit_mask
Index Comment Type Acc. Default Value
2017h_00h number of entries UINT8 ro 02h
2017h_01h tpdo_4_transmit_mask_low UINT32 rw FFFFFFFFh
2017h_02h tpdo_4_transmit_mask_high UINT32 rw FFFFFFFFh
1. Receive-PDO
Index Comment Type Acc. Default Value
1400h_00h number of entries UINT8 ro 02h
1400h_01h COB-ID used by PDO UINT32 rw C0000201h
1400h_02h transmission type UINT8 rw FFh
1600h_00h number of mapped objects UINT8 rw 01h
1600h_01h first mapped object UINT32 rw 60400010h
1600h_02h second mapped object UINT32 rw 00000000h
1600h_03h third mapped object UINT32 rw 00000000h
1600h_04h fourth mapped object UINT32 rw 00000000h
2. Receive-PDO
Index Comment Type Acc. Default Value
1401h_00h number of entries UINT8 ro 02h
1401h_01h COB-ID used by PDO UINT32 rw C0000301h
1401h_02h transmission type UINT8 rw FFh
1601h_00h number of mapped objects UINT8 rw 02h
1601h_01h first mapped object UINT32 rw 60400010h
1601h_02h second mapped object UINT32 rw 60600008h
1601h_03h third mapped object UINT32 rw 00000000h
1601h_04h fourth mapped object UINT32 rw 00000000h
3 Método de acceso CANopen
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 35
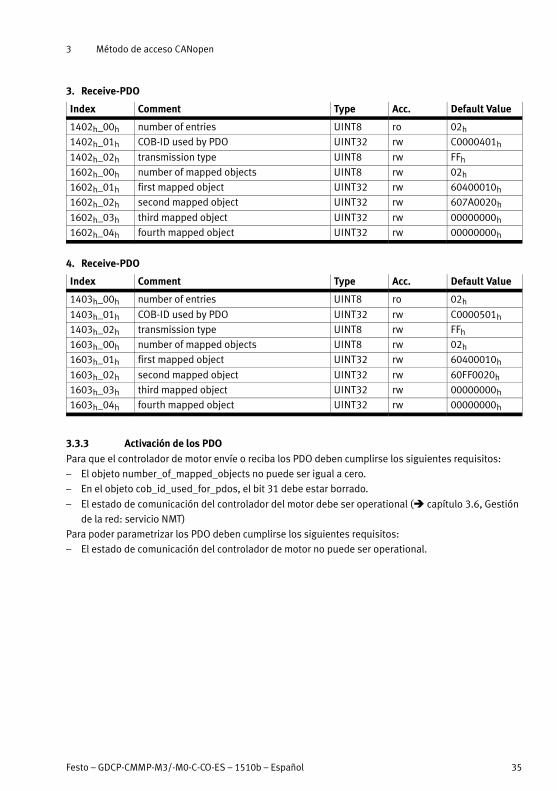
3. Receive-PDO
Index Comment Type Acc. Default Value
1402h_00h number of entries UINT8 ro 02h
1402h_01h COB-ID used by PDO UINT32 rw C0000401h
1402h_02h transmission type UINT8 rw FFh
1602h_00h number of mapped objects UINT8 rw 02h
1602h_01h first mapped object UINT32 rw 60400010h
1602h_02h second mapped object UINT32 rw 607A0020h
1602h_03h third mapped object UINT32 rw 00000000h
1602h_04h fourth mapped object UINT32 rw 00000000h
4. Receive-PDO
Index Comment Type Acc. Default Value
1403h_00h number of entries UINT8 ro 02h
1403h_01h COB-ID used by PDO UINT32 rw C0000501h
1403h_02h transmission type UINT8 rw FFh
1603h_00h number of mapped objects UINT8 rw 02h
1603h_01h first mapped object UINT32 rw 60400010h
1603h_02h second mapped object UINT32 rw 60FF0020h
1603h_03h third mapped object UINT32 rw 00000000h
1603h_04h fourth mapped object UINT32 rw 00000000h
3.3.3 Activación de los PDO
Para que el controlador de motor envíe o reciba los PDO deben cumplirse los siguientes requisitos:
– El objeto number_of_mapped_objects no puede ser igual a cero.
– En el objeto cob_id_used_for_pdos, el bit 31 debe estar borrado.
– El estado de comunicación del controlador del motor debe ser operational (� capítulo 3.6, Gestión
de la red: servicio NMT)
Para poder parametrizar los PDO deben cumplirse los siguientes requisitos:
– El estado de comunicación del controlador de motor no puede ser operational.

3 Método de acceso CANopen
36 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
3.4 SYNC-Message
Se pueden sincronizar varios dispositivos de una instalación. Para ello, uno de los dispositivos (habit
ualmente el control de nivel superior) envía mensajes de sincronización periódicamente. Todos los
controladores conectados reciben estos mensajes y los utilizan para el tratamiento de los PDO
(� capítulo 3.3).
80h 0
Identifier Longitud de datos
El identificador en el que el controlador del motor recibe el mensaje SYNC está configurado de forma
permanente con el valor 080h. El identificador puede leerse a través del objeto cob_id_sync.
Index 1005h
Name cob_id_sync
Object Code VAR
Data Type UINT32
Access rw
Mapping PDO no
Units --
Value Range 80000080h, 00000080h
Default Value 00000080h
3.5 EMERGENCY-Message
El controlador de motor supervisa el funcionamiento de sus módulos principales, que son la fuente de
alimentación, la unidad de salida, la evaluación del transductor angular y las posiciones de enchufe
Ext1 … Ext3. También se controla continuamente el motor (temperatura, transductor angular) y los
detectores de final de carrera. Las parametrizaciones incorrectas también pueden originar mensajes de
error (división entre cero etc.).
Cuando aparece un error, el número de éste se muestra en el indicador del controlador del motor.
Si aparecen simultáneamente varios mensajes de error, el indicador muestra siempre el mensaje que
tiene la prioridad más alta (el número más bajo).

3 Método de acceso CANopen
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 37
3.5.1 Cuadro generalCuando se produce un error, o bien cuando se efectúa un acuse de recibo del error, el regulador envía
un EMERGENCY Message (mensaje de emergencia). El identificador de este mensaje está formado por
el identificador 80h y el número de nodo del regulador afectado.
2
Error free
Error occured
0
1
3
4
Después de un Reset (reinicio) el regulador se encuentra en el estado sin errores “Error free” (que vuel
ve a abandonar de inmediato en caso necesario si hay un error presente desde el principio). Se pueden
producir las transiciones de estado siguientes:
N.° Causa Significado
0 Inicialización concluida
1 Se produce un error No había ningún error y se ha producido uno. Se envía un
EMERGENCY Telegram (telegrama de emergencia) con el
código del error que se ha producido.
2 Acuse de recibo del error Se intenta acusar recibo del error (� cap. 6.1.5), pero no se
han eliminado todas las causas.
3 Se produce un error Ya había un error y se ha producido otro error. Se envía un
EMERGENCY Telegram con el código de error del error nuevo.
4 Acuse de recibo del error Se intenta una validación de error y todas las causas han sido
eliminadas. Se envía un EMERGENCY Telegram con el código de
error 0000.
Tab. 3.8 Posibles transiciones de estado
3.5.2 Estructura del EMERGENCY MessageEn caso de error, el controlador del motor envía un EMERGENCY Message (mensaje de emergencia).
El identificador de dicho mensaje está formado por el identificador 80h y el número de nodo del con
trolador del motor afectado.
El EMERGENCY Message consta de ocho bytes de datos, los dos primeros de los cuales contienen un
error_code cuyo significado se muestra en la tabla siguiente. El tercer byte contiene otro código de
error (objeto 1001h). Los otros cinco bytes contienen ceros.
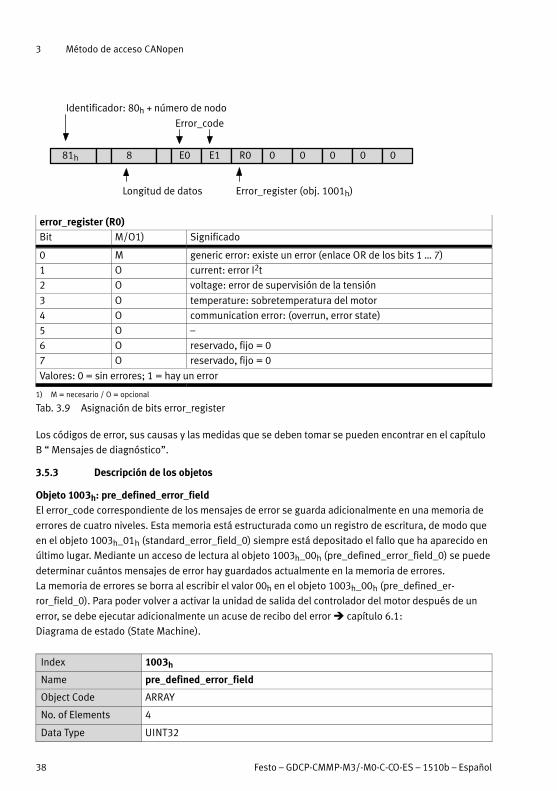
3 Método de acceso CANopen
38 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
81h 8 E0 E1 R0 0 0 0 0 0
Identificador: 80h + número de nodo
Error_code
Longitud de datos Error_register (obj. 1001h)
error_register (R0)Bit M/O1) Significado
0 M generic error: existe un error (enlace OR de los bits 1 … 7)
1 O current: error I2t
2 O voltage: error de supervisión de la tensión
3 O temperature: sobretemperatura del motor
4 O communication error: (overrun, error state)
5 O –
6 O reservado, fijo = 0
7 O reservado, fijo = 0
Valores: 0 = sin errores; 1 = hay un error
1) M = necesario / O = opcional
Tab. 3.9 Asignación de bits error_register
Los códigos de error, sus causas y las medidas que se deben tomar se pueden encontrar en el capítulo
B “ Mensajes de diagnóstico”.
3.5.3 Descripción de los objetos
Objeto 1003h: pre_defined_error_fieldEl error_code correspondiente de los mensajes de error se guarda adicionalmente en una memoria de
errores de cuatro niveles. Esta memoria está estructurada como un registro de escritura, de modo que
en el objeto 1003h_01h (standard_error_field_0) siempre está depositado el fallo que ha aparecido en
último lugar. Mediante un acceso de lectura al objeto 1003h_00h (pre_defined_error_field_0) se puede
determinar cuántos mensajes de error hay guardados actualmente en la memoria de errores.
La memoria de errores se borra al escribir el valor 00h en el objeto 1003h_00h (pre_defined_er
ror_field_0). Para poder volver a activar la unidad de salida del controlador del motor después de un
error, se debe ejecutar adicionalmente un acuse de recibo del error � capítulo 6.1:
Diagrama de estado (State Machine).
Index 1003h
Name pre_defined_error_field
Object Code ARRAY
No. of Elements 4
Data Type UINT32
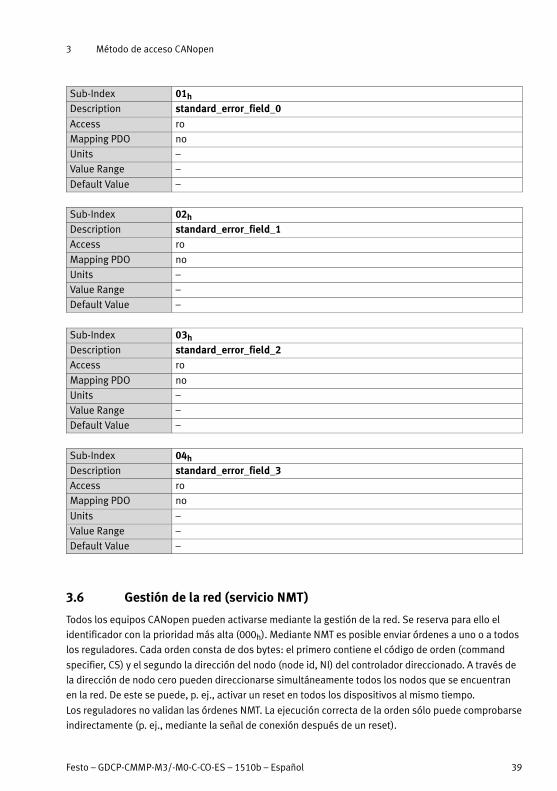
3 Método de acceso CANopen
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 39
Sub-Index 01h
Description standard_error_field_0
Access ro
Mapping PDO no
Units –
Value Range –
Default Value –
Sub-Index 02h
Description standard_error_field_1Access ro
Mapping PDO no
Units –
Value Range –
Default Value –
Sub-Index 03h
Description standard_error_field_2Access ro
Mapping PDO no
Units –
Value Range –
Default Value –
Sub-Index 04h
Description standard_error_field_3Access ro
Mapping PDO no
Units –
Value Range –
Default Value –
3.6 Gestión de la red (servicio NMT)
Todos los equipos CANopen pueden activarse mediante la gestión de la red. Se reserva para ello el
identificador con la prioridad más alta (000h). Mediante NMT es posible enviar órdenes a uno o a todos
los reguladores. Cada orden consta de dos bytes: el primero contiene el código de orden (command
specifier, CS) y el segundo la dirección del nodo (node id, NI) del controlador direccionado. A través de
la dirección de nodo cero pueden direccionarse simultáneamente todos los nodos que se encuentran
en la red. De este se puede, p. ej., activar un reset en todos los dispositivos al mismo tiempo.
Los reguladores no validan las órdenes NMT. La ejecución correcta de la orden sólo puede comprobarse
indirectamente (p. ej., mediante la señal de conexión después de un reset).

3 Método de acceso CANopen
40 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Estructura del mensaje NMT:
000h 2 CS NI
Identificador: 000h
Código de orden
Longitud de datos Node ID
Para el estado NMT del nodo CANopen se han determinado estados en un diagrama de estados.
A través del byte CS en el mensaje NMT pueden originarse modificaciones de estado. Éstas están orien
tadas esencialmente hacia el estado objetivo.
Stopped (04h)
Power On
Reset Communication
Pre-Operational (7Fh)
Operational (05h)
Reset Application
aE
aD
aC
aB
7
86
9
aJ
aA
5
2
3
4
Fig. 3.2 Diagrama de fases
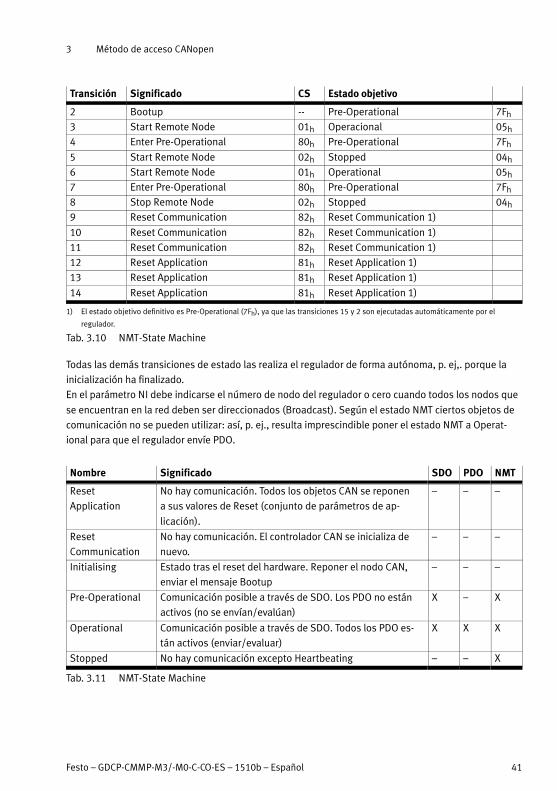
3 Método de acceso CANopen
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 41
Transición Significado CS Estado objetivo
2 Bootup -- Pre-Operational 7Fh
3 Start Remote Node 01h Operacional 05h
4 Enter Pre-Operational 80h Pre-Operational 7Fh
5 Start Remote Node 02h Stopped 04h
6 Start Remote Node 01h Operational 05h
7 Enter Pre-Operational 80h Pre-Operational 7Fh
8 Stop Remote Node 02h Stopped 04h
9 Reset Communication 82h Reset Communication 1)
10 Reset Communication 82h Reset Communication 1)
11 Reset Communication 82h Reset Communication 1)
12 Reset Application 81h Reset Application 1)
13 Reset Application 81h Reset Application 1)
14 Reset Application 81h Reset Application 1)
1) El estado objetivo definitivo es Pre-Operational (7Fh), ya que las transiciones 15 y 2 son ejecutadas automáticamente por el
regulador.
Tab. 3.10 NMT-State Machine
Todas las demás transiciones de estado las realiza el regulador de forma autónoma, p. ej,. porque la
inicialización ha finalizado.
En el parámetro NI debe indicarse el número de nodo del regulador o cero cuando todos los nodos que
se encuentran en la red deben ser direccionados (Broadcast). Según el estado NMT ciertos objetos de
comunicación no se pueden utilizar: así, p. ej., resulta imprescindible poner el estado NMT a Operat
ional para que el regulador envíe PDO.
Nombre Significado SDO PDO NMT
Reset
Application
No hay comunicación. Todos los objetos CAN se reponen
a sus valores de Reset (conjunto de parámetros de ap
licación).
– – –
Reset
Communication
No hay comunicación. El controlador CAN se inicializa de
nuevo.
– – –
Initialising Estado tras el reset del hardware. Reponer el nodo CAN,
enviar el mensaje Bootup
– – –
Pre-Operational Comunicación posible a través de SDO. Los PDO no están
activos (no se envían/evalúan)
X – X
Operational Comunicación posible a través de SDO. Todos los PDO es
tán activos (enviar/evaluar)
X X X
Stopped No hay comunicación excepto Heartbeating – – X
Tab. 3.11 NMT-State Machine

3 Método de acceso CANopen
42 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
¡No se permite enviar los telegramas NMT en una ráfaga (seguidos uno tras otro)!
Entre dos mensajes NMT consecutivos en el bus (¡aunque sean para nodos distintos!)
debe pasar al menos el doble del tiempo de ciclo del regulador de posición para que el
regulador procese correctamente los mensajes NMT.
Si es necesario, la orden NMT “Reset Application” se retrasa hasta que un proceso de
almacenamiento en curso haya concluido, pues en otro caso el proceso quedaría incom
pleto (conjunto de parámetros defectuoso).
El retraso puede durar algunos segundos.
El estado de comunicación del controlador de motor debe ajustarse a operational para
que el regulador envíe y reciba PDOs.
3.7 Bootup
3.7.1 Cuadro generalDespués de conectar la alimentación de corriente o de un reset el regulador comunica, mediante un
mensaje Bootup, que la fase de inicialización ha finalizado. El regulador se encuentra entonces en es
tado NMT preoperational (� capítulo 3.6, Gestión de la red (servicio NMT))
3.7.2 Estructura del mensaje BootupLa estructura del mensaje Bootup es casi idéntica a la del siguiente mensaje Heartbeat.
La única diferencia es que en lugar del estado NMT se envía un cero.
701h 1 0
Identificador: 700h + número de nodo
Identificador mensaje Bootup
Longitud de datos

3 Método de acceso CANopen
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 43
3.8 Heartbeat (Error Control Protocol)
3.8.1 Cuadro general
Para supervisar la comunicación entre el slave (accionamiento) y el master se puede activar el
protocolo llamado Heartbeat: con éste, el actuador envía mensajes cíclicamente al master. El master
puede comprobar la aparición cíclica de estos mensajes e iniciar las medidas adecuadas si éstas no
aparecen. Dado que tanto los telegramas Heartbeat como los telegramas Nodeguarding (� cap. 3.9)
se envían con el identificador 700h + número de nodo, estos dos protocolos no pueden estar activos al
mismo tiempo. Si se activan ambos protocolos a la vez, sólo permanece activo el protocolo Heartbeat.
3.8.2 Estructura del mensaje HeartbeatEl telegrama Heartbeat siempre se envía con el identificador 700h + número de nodo. Sólo contiene
1 byte de datos útiles, el estado NMT del regulador (� capítulo 3.6, Gestión de la red (servicio NMT)).
701h 1 N
Identificador: 700h + número de nodo
Estado NMT
Longitud de datos
N Significado
04h Stopped
05h Operacional
7Fh Pre-Operational
3.8.3 Descripción de los objetos
Objeto 1017h: producer_heartbeat_timePara activar la funcionalidad Heartbeat se puede determinar el tiempo entre dos telegramas Heartbeat
mediante el objeto producer_heartbeat_time.
Index 1017h
Name producer_heartbeat_time
Object Code VAR
Data Type UINT16
Access rw
PDO no
Units ms
Value Range 0 … 65535
Default Value 0

3 Método de acceso CANopen
44 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
El producer_heartbeat_time se puede almacenar en el conjunto de parámetros. Si el regulador arranca
con un producer_heartbeat_time distinto de cero, el mensaje Bootup es considerado como el primer
Heartbeat.
El regulador sólo se puede utilizar como “Heartbeat Producer”. Por eso el objeto 1016h
(consumer_heartbeat_time) está implementado por motivos de compatibilidad y devuelve
siempre un 0.
3.9 Nodeguarding (Error Control Protocol)
3.9.1 Cuadro generalEl protocolo llamado Nodeguarding también se puede utilizar para supervisar la comunicación entre el
slave (accionamiento) y el master. A diferencia del protocolo Heartbeat, en este caso el master y el
slave se supervisan mutuamente: el master pregunta cíclicamente al actuador su estado NMT. En cada
respuesta del regulador se invierte un bit determinado. Si no hay respuestas o el regulador responde
siempre con el mismo bit invertido (Togglebit), el master puede reaccionar adecuadamente. El ac
tuador también supervisa la llegada de las consultas de Nodeguarding del master: si no hay mensajes
durante un periodo de tiempo determinado, el regulador emite el error 12-4. Dado que tanto los teleg
ramas Heartbeat como los telegramas Nodeguarding (� capítulo 3.8) se envían con el identificador
700h + número de nodo, estos dos protocolos no pueden estar activos al mismo tiempo. Si se activan
ambos protocolos a la vez, sólo permanece activo el protocolo Heartbeat.
3.9.2 Estructura de los mensajes Nodeguarding
La demanda del master debe enviarse como “Remoteframe” con el identificador 700h + número de
nodo. En un Remoteframe está activado adicionalmente un bit especial en el telegrama, el bit remoto
(Remotebit). Los Remoteframes en principio no tienen datos.
701h R 0
Identificador: 700h + número de nodo
Remotebit (los Remoteframes no tienen datos)
La respuesta del regulador está estructurada de forma análoga al mensaje Heartbeat. Sólo contiene
1 byte de datos útiles, el Togglebit y el estado NMT del regulador (� capítulo 3.6).
701h 1 T/N
Identificador: 700h + número de nodo
Togglebit / estado NMT
Longitud de datos

3 Método de acceso CANopen
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 45
El primer byte de datos (T/N) está estructurado de la siguiente manera:
Bit Valor Nombre Significado
7 80h toggle_bit Se modifica con cada telegrama
0 … 6 7Fh nmt_state 04h Stopped
05h Operational
7Fh Pre-Operational
El tiempo de supervisión para demandas del master se puede parametrizar. La supervisión empieza
con la primera demanda remota del master recibida. A partir de ese momento las demandas remotas
deben llegar antes de que haya transcurrido el tiempo de supervisión ajustado, ya que en otro caso se
activará el fallo 12-4.
El Togglebit se repone mediante el comando NMT Reset Communication. Por lo tanto en la primera
respuesta del regulador está borrado.
3.9.3 Descripción de los objetos
Objeto 100Ch: guard_timePara activar la supervisión de Nodeguarding se parametriza el tiempo máximo entre dos consultas
remotas del master. Dicho tiempo se determina en el regulador mediante el producto de guard_time
(100Ch) y life_time_factor (100Dh). Por lo tanto se recomienda escribir 1 en el life_time_factor y es
pecificar el tiempo en milisegundos directamente a través de guard_time.
Index 100Ch
Name guard_time
Object Code VAR
Data Type UINT16
Access rw
Mapping PDO no
Units ms
Value Range 0 … 65535
Default Value 0
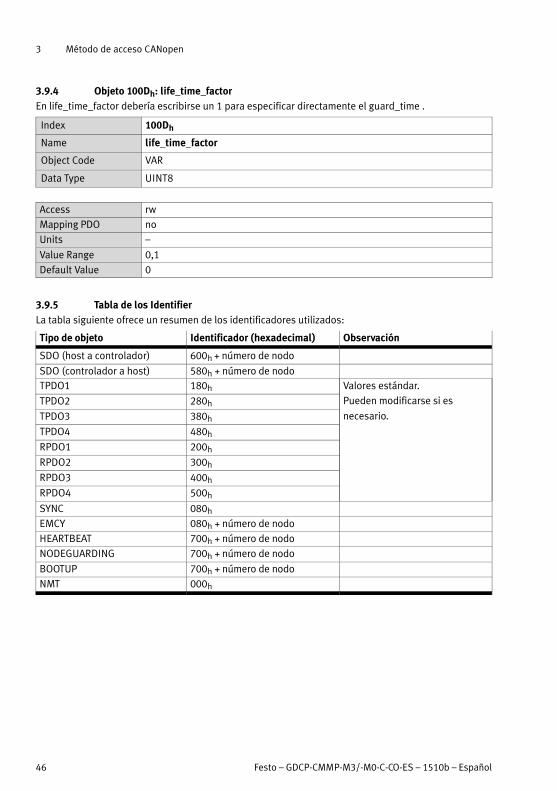
3 Método de acceso CANopen
46 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
3.9.4 Objeto 100Dh: life_time_factorEn life_time_factor debería escribirse un 1 para especificar directamente el guard_time .
Index 100Dh
Name life_time_factor
Object Code VAR
Data Type UINT8
Access rw
Mapping PDO no
Units –
Value Range 0,1
Default Value 0
3.9.5 Tabla de los IdentifierLa tabla siguiente ofrece un resumen de los identificadores utilizados:
Tipo de objeto Identificador (hexadecimal) Observación
SDO (host a controlador) 600h + número de nodo
SDO (controlador a host) 580h + número de nodoTPDO1 180h Valores estándar.
Pueden modificarse si es
necesario.
TPDO2 280h
TPDO3 380h
TPDO4 480h
RPDO1 200h
RPDO2 300h
RPDO3 400h
RPDO4 500h
SYNC 080h
EMCY 080h + número de nodo
HEARTBEAT 700h + número de nodo
NODEGUARDING 700h + número de nodo
BOOTUP 700h + número de nodo
NMT 000h

4 Interfaz EtherCAT
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 47
4 EtherCAT con CoE
M3Esta sección solo es válida para el controlador de motor CMMP-AS-…-M3.
4.1 Sumario
Esta parte de la documentación describe la conexión y la configuración del controlador de motor
CMMP-AS-...-M3 en una red EtherCAT. Está dirigido a personas que ya estén familiarizadas con esta
serie de controladores del motor y con CANopen CiA 402.
El sistema de bus de campo EtherCAT (Ethernet for Controller and Automation Technology) cuenta con
el respaldo y el asesoramiento de la organización internacional EtherCAT Technology Group (ETG) y está
concebido como una tecnología abierta normalizada por la Comisión Electrotécnica Internacional (CEI).
EtherCAT es un sistema de bus de campo basado en el estándar Ethernet que, gracias a su velocidad,
topología flexible (en línea, árbol, estrella) y sencilla configuración, se puede manejar como un bus de
campo. El protocolo EtherCAT se transmite directamente a la trama Ethernet según el estándar
IEEE802.3 con un campo tipo de Ethernet especial normalizado. Permite broadcast, multicast y
comunicación entre slaves. En EtherCAT, el intercambio de datos se realiza en un hardware dedicado.
Abreviación Significado
ESC EtherCAT Slave Controller
PDI Process Data Interface
CoE Protocolo CANopen-over-EtherCAT
Tab. 4.1 Abreviaciones específicas de EtherCAT
4.2 Interfaz EtherCat CAMC-EC
La interfaz EtherCAT CAMC-EC permite conectar el controlador de motor CMMP-AS-...-M3 al sistema de
bus de campo EtherCAT. La comunicación a través de la interfaz EtherCAT (IEEE 802.3u) se realiza con
un cableado estándar para EtherCAT y se puede efectuar entre el CMMP-AS-...-M3 a partir de la revisión
01 y el software de parametrización FCT a partir de la versión 2.0.
En el CMMP-AS-...-M3 Festo ofrece compatibilidad con el protocolo CoE (CANopen over
EtherCAT).

4 Interfaz EtherCAT
48 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Características técnicas de la interfaz EtherCAT CAMC-ECCaracterísticas de la interfaz EtherCAT:
– Desde el punto de vista mecánico, es completamente integrable en los controladores de motor de
la serie CMMP-AS-...-M3
– EtherCAT conforme a IEEE-802.3u (100Base-TX) con 100 Mbps (en dúplex completo)
– Topologías de estrella y en línea.
– Conector enchufable: RJ45
– Interfaz EtherCAT con separación de potencial.
– Ciclo de comunicación: 1 �ms
– Máx. 127 slaves.
– La implementación del slave EtherCAT se basa en el protocolo FPGA ESC20 de la empresa Beckhoff.
– Compatible con la característica “Distributed Clocks” para la aceptación del valor nominal del tiem
po de manera sincronizada
– Indicadores LED para el estado operacional y detección de enlaces caídos.
Elementos de conexión e indicación de la interfaz EtherCAT
En la placa frontal de la interfaz EtherCAT se encuentran dispuestos los elementos siguientes:
– LED 1 (LED bicolor) para:
– Comunicación EtherCAT (amarillo).
– “Conexión activa en el puerto 1” (rojo)
– Marcha (verde)
– LED 2 (rojo) para indicar “Conexión activa en el puerto 2”
– Dos casquillos RJ45.
En la figura siguiente se muestra la posición de los casquillos y su numeración:
1 LED22 LED13 Casquillo RJ45 [X1]4 Casquillo RJ45 [X2]
2
3
1
4
Fig. 4.1 Elementos de conexión e indicación de la interfaz EtherCAT
La interfaz EtherCAT sólo puede funcionar en la ranura opcional Ext2. El uso de otros
módulos de interfaz en la ranura opcional Ext1 no resulta posible, a excepción del
CAMC-D-8E8A.

4 Interfaz EtherCAT
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 49
4.3 Montaje de la interfaz EtherCAT en el controlador
NotaAntes de llevar a cabo los trabajos de montaje e instalación, tenga en cuenta
las indicaciones de seguridad recogidas en la descripción de hardware
GDCP-CMMP-M3-HW-...
Utilizando un destornillador de estrella apropiado, desenroscar la chapa frontal situada sobre la ranura
de conexión Ext2 del controlador de motor CMMP-AS-...-M3. A continuación, introducir la interfaz
EtherCAT en la ranura de conexión abierta (Ext2), de tal modo que la pletina se deslice por las guías
laterales de la ranura de conexión. Empujar la interfaz hasta que haga tope. Para terminar, atornillar la
interfaz a la carcasa del controlador de motor usando el destornillador de estrella.
4.4 Asignación de clavijas y especificaciones de cables
Casquillos RJ45 Función
[X1] (casquillo RJ45 superior) Enlace ascendente al master o a un participante anterior de una
conexión lineal (p. ej., varios controladores del motor)
[X2] (casquillo RJ45 inferior) Fin de una conexión lineal o conexión de otros participantes poster
iores
Tab. 4.2 Versión del conector enchufable [X1] y [X2]
Pin Especificación
1 Señal – del receptor (RX–) Par de hilos 3
2 Señal + del receptor (RX+) Par de hilos 3
3 Señal – de envío (TX–) Par de hilos 2
4 – Par de hilos 1
5 – Par de hilos 1
6 Señal + de envío (TX+) Par de hilos 2
7 – Par de hilos 4
8 – Par de hilos 4
Tab. 4.3 Asignación de los conectores enchufables [X1] y [X2]
Valor Función
Interfaz EtherCAT, nivel de señal 0 … 2,5 V DC
Interfaz EtherCAT, tensión diferencial 1,9 … 2,1 V DC
Tab. 4.4 Especificación de la interfaz EtherCAT
4 Interfaz EtherCAT
50 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Tipo y modelos de cableEl cableado se efectúa con cables de par trenzado apantallados STP, cat. 5. Se admiten topologías de
estrella y lineales. La red debe construirse conforme a la regla 5-4-3. Se permite el cableado de un
máximo de 10 concentradores en línea. La interfaz EtherCAT incluye un concentrador. La longitud
máxima de cableado está limitada a 100 m.
Fallos por la utilización de cables de bus no apropiadosDebido a que las velocidades de transmisión pueden ser muy elevadas, recomendamos
utilizar exclusivamente cables y conectores enchufables estandarizados que correspon
dan al menos a la categoría 5 (CAT5) según las normas EN 50173 o ISO/CEI 11801.
Al construir la red EtherCAT deben seguirse obligatoriamente los consejos de la documen
tación de uso habitual y observarse la información y las notas siguientes para que el
sistema sea estable y no tenga fallos. Si el cableado no se realiza debidamente, durante
el funcionamiento pueden aparecer averías en el bus EtherCAT que pueden causar que el
controlador de motor CMMP-AS-...-M3 se desconecte a causa de un fallo, por motivos de
seguridad.
Terminación de busNo se requieren terminaciones externas de bus. El módulo de tecnología EtherCAT supervisa sus dos
puertos y termina el bus automáticamente (función loopback).
4 Interfaz EtherCAT
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 51
4.5 Configuración del participante EtherCAT
Para crear una interfaz EtherCAT operativa son necesarios varios pasos. Esta sección ofrece un re
sumen de los pasos necesarios por parte del slave para la parametrización y configuración.
Importante: La parametrización y la puesta a punto del controlador de motor son solo
posibles en una interfaz de control EtherCAT con un master conectado.
Hallará notas respecto a la puesta a punto con el Festo Configuration Tool en la ayuda del
plugin FCT específico del equipo.
Por ello, al planificar el proyecto para la interfaz EtherCAT el usuario debe definir estas determinacio
nes. Solo después debe realizarse la parametrización de la conexión del bus de campo en ambos lados.
Se recomienda realizar primero la parametrización del slave. Después se configura el master. Si la para
metrización es correcta, la aplicación estará lista inmediatamente sin fallos de comunicación.
Se recomienda proceder de la manera siguiente:
1. Activación de la comunicación Bus.
La comunicación EtherCAT se pone en marcha automáticamente a través del CMMP-AS-..-M3,
cuando este último reconoce tras la conexión que hay una interfaz EtherCAT contectada.
La comunicación no puede desactivarse mediante el interruptor DIL 8.
2. Parametrización y puesta a punto con Festo Configuration Tool (FCT).
Además los siguientes ajustes en la página Bus de campo:
– unidades físicas (registro Grupo de factores)
Tenga en cuenta que después de un reinicio la parametrización de las funciones EtherCAT
solo se mantiene si se ha memorizado el conjunto de parámetros del controlador del
motor.
3. Configuración del master EtherCat � siguientes secciones.
4.5.1 Ajuste de las unidades físicas (grupo de factores)
Para que un master de bus de campo pueda intercambiar datos de posición, velocidad y aceleración en
unidades físicas (p. ej mm, mm/s, mm/s2) con el controlador del motor, estos tienen que parame
trizarse a través del grupo de factores � Sección 5.3.
La parametrización puede efectuarse a través del FCT.

4 Interfaz EtherCAT
52 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
4.6 Interfaz de comunicación CANopen
Los protocolos de usuario se pasan por un túnel EtherCAT. En la capa de comunicación del protocolo
CANopen-over-EtherCAT (CoE) compatible con CMMP-AS-...-M3, la mayoría de objetos conformes con
CiA 301 son compatibles con EtherCAT. Estos objetos sirven, en su mayoría, para establecer la comuni
cación entre master y slave.
La mayoría de los objetos que también se pueden manejar a través del bus de campo CANopen normal
son compatibles con el perfil Motion CANopen conforme a CiA 402. Por lo general, la implementación
de CoE Ethercat del controlador de motor CMMP-AS-...-M3 es compatible con los servicios y los grupos
de objetos siguientes:
Servicios/grupos de objetos Función
SDO Service Data Object Se utilizan para la parametrización normal del controlador de motor.
PDO Process Data Object Posibilidad de intercambio rápido de datos de proceso (p. ej.,
velocidad real).
EMCY Emergency Message Transmisión de avisos de error.
Tab. 4.5 Servicios y grupos de objetos compatibles
Cada uno de los objetos que puede activarse a través del protocolo CoE del controlador de motor
CMMP-AS-...-M3, puede enviarse de manera interna a la implementación CANopen existente y ser pro
cesado allí.
En todo caso, en la implementación CoE con EtherCAT se han añadido algunos objetos CANopen
nuevos, necesarios para la conexión especial a través de CoE. Esto se debe a la modificación de la in
terfaz de comunicación entre los protocolos EtherCAT y CANopen. Aquí se utiliza el denominado Sync
Manager para controlar la transmisión de objetos de datos de proceso y de objetos de datos de servic
io a través de ambos tipos de transferencia EtherCAT (protocolos de correo electrónico y de datos de
proceso).
Este Sync Manager y los pasos de configuración necesarios para el funcionamiento del CMMP-AS-...-M3
con CoE EtherCAT se describen en el capítulo 4.6.1 “Configuración de la interfaz de comunicación”. Los
objetos adicionales están descritos en el capítulo 4.6.2 “Objetos nuevos y modificados en CoE”.
Asimismo, algunos objetos del CMMP-AS-...-M3 que están disponibles en una conexión CANopen nor
mal no son compatibles con una conexión CoE a través de EtherCAT.
En el capítulo 4.6.3 “Objetos no compatibles en CoE” se proporciona una lista de los objetos CANopen
no compatibles con CoE.
4.6.1 Configuración de la interfaz de comunicaciónTal como se describió en el capítulo anterior, el protocolo EtherCAT utiliza dos tipos de transferencia
diferentes para transmitir los protocolos de equipo y de usuario, p. ej., el protocolo CANopen-over-
EtherCAT (CoE) utilizado por el CMMP‐AS‐...‐M3/-M0. Los tipos de transferencia son: el protocolo de
telegramas de correo electrónico para datos acíclicos y el protocolo de telegramas de datos de proceso
para transmitir datos cíclicos.
En el protocolo CoE, estos dos tipos se utilizan para diferentes tipos de transferencia CANopen como se
indica a continuación:

4 Interfaz EtherCAT
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 53
Protocolo de telegramas Descripción Remisión
Mailbox Este tipo de transferencia sirve para transmitir los ob
jetos de datos de servicio (SDO) definidos en CANopen.
En EtherCAT, éstos se transmiten en tramas de SDO.
� capítulo 4.8
“Trama SDO”
Datos de proceso Este tipo de transferencia sirve para transmitir Process
Data Objects (PDO) definidos en CANopen y utilizados
para intercambiar datos cíclicos. En EtherCAT, éstos se
transmiten en tramas de PDO.
� capítulo 4.9
“Trama PDO”
Tab. 4.6 Protocolo de telegramas: descripción
En principio, con estos dos tipos de transferencia, todos los objetos de datos de proceso y los objetos
de datos de servicio pueden utilizarse para el CMMP-AS-...-M3 del mismo modo definido para el proto
colo CANopen.
La parametrización de los objetos de datos de proceso y de los objetos de datos de servicio se diferen
cia en los ajustes que son necesarios realizar en CANopen para enviar los objetos a través de EtherCAT.
Para integrar los objetos CANopen que deben intercambiarse a través de transmisiones de PDO y de
SDO entre el master y el slave en el protocolo EtherCAT, se ha implementado un Sync Manager con
EtherCAT.
El Sync Manager sirve para integrar los datos de los objetos de datos de proceso y objetos de datos de
servicio que deben enviarse en los telegramas EtherCAT. Con este fin, el Sync Manager proporciona
varios canales de sincronización que pueden convertir un canal de datos CANopen (SDO de recepción,
SDO de transmisión, PDO de recepción o PDO de transmisión) al telegrama EtherCAT.
En la figura se muestra la integración del Sync Manager en el sistema:
Bus EtherCAT
Canal SYNC 0
Canal SYNC 1
Canal SYNC 2
Canal SYNC 3
Receive SDO
Transmit SDO
Receive PDO (1/2/3/4)
Transmit PDO (1/2/3/4)
Fig. 4.2 Ejemplo de asignación de los objetos de datos de servicio y de los objetos de datos de
proceso en los canales de sincronización
Todos los objetos se envían a través de los denominados canales de sincronización. Los datos de estos
canales se integran y transmiten automáticamente al flujo de datos EtherCAT. La implementación Ether
4 Interfaz EtherCAT
54 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
CAT en el controlador de motor CMMP-AS-...-M3 es compatible con cuatro canales de sincronización de
estas características.
Por esta razón, es necesario realizar un asignación adicional de los objetos de datos de servicio y de los
objetos de datos de proceso en los canales de sincronización para CANopen. Esto se efectúa mediante
lo que se conoce como objetos de Sync Manager (objetos 1C00h y 1C10h … 1C13h � capítulo 4.6.2).
Estos objetos se describen con más detalle a continuación.
La asignación de dichos canales a los tipos de transferencia es fija y el usuario no puede cambiarla.
Asignación:
– Canal Sync 0: protocolo de telegramas de correo electrónico para SDO entrantes (master => slave)
– Canal Sync 1: protocolo de telegramas de correo electrónico para SDO salientes (master <= slave)
– Canal Sync 2: protocolo de telegramas de datos de proceso para PDO entrantes (master => slave).
En este caso se debe tener en cuenta el objeto 1C12h.
– Canal Sync 3: protocolo de telegramas de datos de proceso para PDO salientes (master <= slave).
En este caso se debe tener en cuenta el objeto 1C13h.
La parametrización de los PDO individuales se ajusta mediante los objetos 1600h a 1603h (Receive
PDO) y 1A00h a 1A03h (Transmit PDO). La parametrización de los PDO se lleva a cabo de la manera
descrita en el capítulo 3 “ Método de acceso CANopen”.
En principio, el ajuste de los canales Sync y la configuración de los PDO únicamente se puede efectuar
en estado “Pre-Operational”.
EtherCAT no contempla la parametrización del slave. Los archivos de descripción de eq
uipos sirven para este fin. En ellos está predeterminada la parametrización completa,
incluyendo la parametrización de objetos de datos de proceso, y el master la utiliza
durante la inicialización.
Por lo tanto, la parametrización no debe modificarse manualmente, sino en los archivos
de descripción del equipo. En la sección 4.12 se describen con más detalle los puntos
más importantes para el usuario de los archivos de descripción del equipo.
Los canales de sincronización descritos aquí NO se corresponden con los telegramas de
sincronización conocidos por CANopen. Los telegramas de sincronización CANopen
pueden seguir transmitiéndose como objetos de datos de servicio a través de la interfaz
SDO implementada con CoE pero no afectan directamente en los canales de sin
cronización descritos más arriba.
4.6.2 Objetos nuevos y modificados en CoE
En la tabla siguiente se muestran los índices y los subíndices utilizados para los objetos de
comunicación compatibles con CANopen que se han añadido al sistema de bus de campo EtherCAT en
el rango de 1000h a 1FFFh. Éstos reemplazan principalmente los parámetros de comunicación confor
me a CiA 301.

4 Interfaz EtherCAT
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 55
Objeto Significado Permitido en
1000h Device Type Identificador del mando del equipo
1018h Identity Object ID del vendedor, código del producto, revisión, número de
serie
1100h EtherCAT fixed station
address
Dirección fija que el master asigna al slave durante la inic
ialización
1600h Primer RxPDO Mapping Identificador del primer Receive PDO
1601h Segundo RxPDO Mapping Identificador del segundo Receive PDO
1602h Tercer RxPDO Mapping Identificador del tercer Receive PDO
1603h Cuarto RxPDO Mapping Identificador del cuarto Receive PDO
1A00h Primer TxPDO Mapping Identificador del primer Transmit PDO
1A01h Segundo TxPDO Mapping Identificador del segundo Transmit PDO
1A02h Tercer TxPDO Mapping Identificador del tercer Transmit PDO
1A03h Cuarto TxPDO Mapping Identificador del cuarto Transmit PDO
1C00h Sync Manager
Communication Type
Objeto para configurar los canales individuales de
sincronización (transferencia de SDO o PDO)
1C10h Sync Manager PDO
Mapping for Syncchannel 0
Asignación del canal Sync 0 a un PDO/SDO (el canal 0 siem
pre está reservado para el Mailbox Send SDO Transfer)
1C11h Sync Manager PDO
Mapping for Syncchannel 1
Asignación del canal Sync 1 a un PDO/SDO (el canal 1 siem
pre está reservado para el Mailbox Send SDO Transfer)
1C12h Sync Manager PDO
Mapping for Syncchannel 2
Asignación del canal Sync 2 a un PDO
(el canal 2 está reservado para Receive PDO)
1C13h Sync Manager PDO
Mapping for Syncchannel 3
Asignación del canal Sync 3 a un PDO
(el canal 3 está reservado para Transmit PDO)
Tab. 4.7 Objetos de comunicación nuevos y modificados
En los siguientes capítulos se describen con más detalle los objetos 1C00h y 1C10h…1C13h ya que
únicamente están definidos e implementados en el protocolo CoE EtherCAT y por lo tanto no están
documentados en el manual de CANopen para el controlador de motor CMMP-AS-...-M3.
El controlador de motor CMMP-AS-...-M3 con interfaz EtherCAT es compatible con cuatro
PDO de recepción (RxPDO) y cuatro PDO de transmisión (TxPDO).
Los objetos 1008h, 1009h y 100Ah no son compatibles con CMMP-AS-...-M3 porque las
cadenas de lenguaje usual no pueden leerse en el controlador de motor.
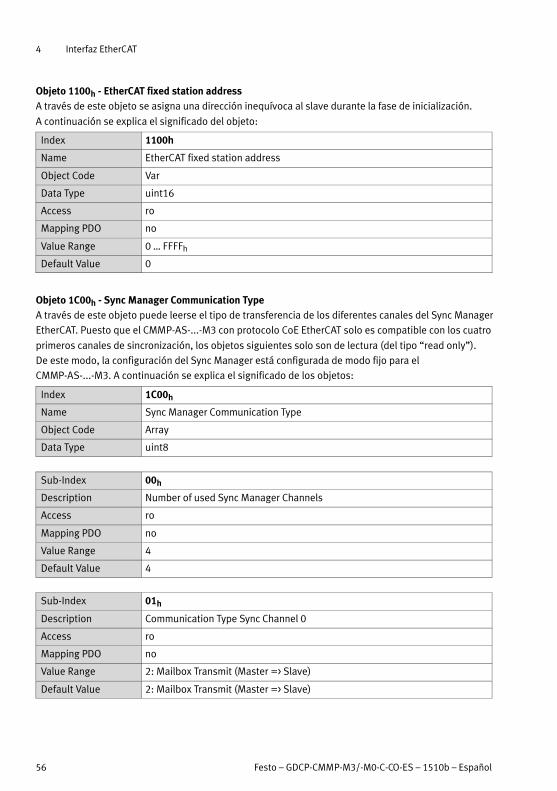
4 Interfaz EtherCAT
56 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Objeto 1100h - EtherCAT fixed station addressA través de este objeto se asigna una dirección inequívoca al slave durante la fase de inicialización.
A continuación se explica el significado del objeto:
Index 1100h
Name EtherCAT fixed station address
Object Code Var
Data Type uint16
Access ro
Mapping PDO no
Value Range 0 … FFFFh
Default Value 0
Objeto 1C00h - Sync Manager Communication TypeA través de este objeto puede leerse el tipo de transferencia de los diferentes canales del Sync Manager
EtherCAT. Puesto que el CMMP-AS-...-M3 con protocolo CoE EtherCAT solo es compatible con los cuatro
primeros canales de sincronización, los objetos siguientes solo son de lectura (del tipo “read only”).
De este modo, la configuración del Sync Manager está configurada de modo fijo para el
CMMP-AS-...-M3. A continuación se explica el significado de los objetos:
Index 1C00h
Name Sync Manager Communication Type
Object Code Array
Data Type uint8
Sub-Index 00h
Description Number of used Sync Manager Channels
Access ro
Mapping PDO no
Value Range 4
Default Value 4
Sub-Index 01h
Description Communication Type Sync Channel 0
Access ro
Mapping PDO no
Value Range 2: Mailbox Transmit (Master => Slave)
Default Value 2: Mailbox Transmit (Master => Slave)

4 Interfaz EtherCAT
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 57
Sub-Index 02h
Description Communication Type Sync Channel 1
Access ro
Mapping PDO no
Value Range 2: Mailbox Transmit (Master <= Slave)
Default Value 2: Mailbox Transmit (Master <= Slave)
Index 03h
Description Communication Type Sync Channel 2
Access ro
Mapping PDO no
Value Range 0: unused
3: Process Data Output (RxPDO / Master => Slave)
Default Value 3
Sub-Index 04h
Description Communication Type Sync Channel 3
Access ro
Mapping PDO no
Value Range 0: unused
4: Process Data Input (TxPDO/Master <= Slave)
Default Value 4
Objeto 1C10h - Sync Manager Channel 0 (Mailbox Receive)
A través de este objeto puede configurarse un objeto de datos de proceso para el canal de sin
cronización 0. El usuario no puede cambiar el objeto porque el canal de sincronización 0 está siempre
asignado al protocolo de telegramas de correo electrónico. Por lo tanto, el objeto tiene siempre los
valores siguientes:
Index 1C10h
Name Sync Manager Channel 0 (Mailbox Receive)
Object Code Array
Data Type uint8

4 Interfaz EtherCAT
58 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Sub-Index 00h
Description Number of assigned PDOs
Access ro
Mapping PDO no
Value Range 0 (no PDO assigned to this channel)
Default Value 0 (no PDO assigned to this channel)
El nombre fijado para el subíndice 0 de estos objetos por la especificación EtherCAT
“Number of assigned PDOs” puede resultar confuso, porque los canales 0 y 1 del Sync
Manager están siempre ocupados con el telegrama de correo electrónico. En este tipo de
telegrama se transmiten siempre objetos de datos de servicio con CoE EtherCAT. En con
secuencia, el subíndice 0 de ambos objetos no se utiliza.
Objeto 1C11h - Sync Manager Channel 1 (Mailbox Send)A través de este objeto puede configurarse un objeto de datos de proceso para el canal de sin
cronización 1. El usuario no puede cambiar el objeto porque el canal de sincronización 1 está siempre
asignado al protocolo de telegramas de correo electrónico. Por lo tanto, el objeto tiene siempre los
valores siguientes:
Index 1C11h
Name Sync Manager Channel 1 (Mailbox Send)
Object Code Array
Data Type uint8
Sub-Index 00h
Description Number of assigned PDOs
Access ro
Mapping PDO no
Value Range 0 (no PDO assigned to this channel)
Default Value 0 (no PDO assigned to this channel)
Objeto 1C12h - Sync Manager Channel 2 (Process Data Output)A través de este objeto puede configurarse un objeto de datos de proceso para el canal de sin
cronización 2. El canal Sync 2 está dedicado de forma fija a la recepción de Receive PDO (master =>
slave). En este objeto debe ajustarse el número de objetos de datos de proceso asignados a dicho
canal de sincronización bajo el subíndice 0.
A continuación, en los subíndices 1 a 4 se registra el número de objeto del PDO que debe asignarse al
canal. Sólo se pueden utilizar los números de objeto de los Receive PDO previamente configurados
(objetos 1600h … 1603h).

4 Interfaz EtherCAT
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 59
En la implementación actual, el firmware del controlador del motor no efectúa ninguna evaluación adic
ional de los datos, p. ej., de objetos.
En su lugar se utiliza la configuración CANopen de los objetos de datos de proceso para evaluarlos con
EtherCAT.
Index 1C12h
Name Sync Manager Channel 2 (Process Data Output)
Object Code Array
Data Type uint8
Sub-Index 00h
Description Number of assigned PDOs
Access rw
Mapping PDO no
Value Range 0: no PDO assigned to this channel
1: one PDO assigned to this channel
2: two PDOs assigned to this channel
3: three PDOs assigned to this channel
4: four PDOs assigned to this channel
Default Value 0 :no PDO assigned to this channel
Sub-Index 01h
Description PDO Mapping object Number of assigned RxPDO
Access rw
Mapping PDO no
Value Range 1600h: first Receive PDO
Default Value 1600h: first Receive PDO
Sub-Index 02h
Description PDO Mapping object Number of assigned RxPDO
Access rw
Mapping PDO no
Value Range 1601h: second Receive PDO
Default Value 1601h: second Receive PDO
Sub-Index 03h
Description PDO Mapping object Number of assigned RxPDO
Access rw
Mapping PDO no
Value Range 1602h: third Receive PDO
Default Value 1602h: third Receive PDO

4 Interfaz EtherCAT
60 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Sub-Index 04h
Description PDO Mapping object Number of assigned RxPDO
Access rw
Mapping PDO no
Value Range 1603h: fourth Receive PDO
Default Value 1603h: fourth Receive PDO
Objeto 1C13h - Sync Manager Channel 3 (Process Data Input)
A través de este objeto puede configurarse un objeto de datos de proceso para el canal de sin
cronización 3. El canal Sync 3 está dedicado de forma fija al envío de Transmit PDO (master <= slave).
En este objeto debe ajustarse el número de objetos de datos de proceso asignados a dicho canal de
sincronización bajo el subíndice 0.
A continuación, en los subíndices 1 a 4 se registra el número de objeto del PDO que debe asignarse al
canal. Sólo se pueden utilizar los números de objeto de los Transmit PDO previamente configurados
(objetos 1A00h hasta 1A03h).
Index 1C13h
Name Sync Manager Channel 3 (Process Data Input)
Object Code Array
Data Type uint8
Sub-Index 00h
Description Number of assigned PDOs
Access rw
Mapping PDO no
Value Range 0: no PDO assigned to this channel
1: one PDO assigned to this channel
2: two PDOs assigned to this channel
3: three PDOs assigned to this channel
4: four PDOs assigned to this channel
Default Value 0: no PDO assigned to this channel
Sub-Index 01h
Description PDO Mapping object Number of assigned TxPDO
Access rw
Mapping PDO no
Value Range 1A00h: first Transmit PDO
Default Value 1A00h: first Transmit PDO
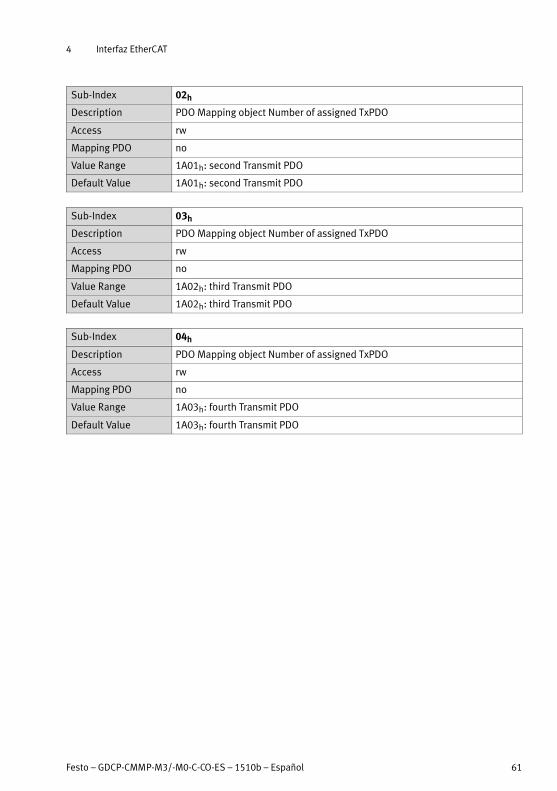
4 Interfaz EtherCAT
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 61
Sub-Index 02h
Description PDO Mapping object Number of assigned TxPDO
Access rw
Mapping PDO no
Value Range 1A01h: second Transmit PDO
Default Value 1A01h: second Transmit PDO
Sub-Index 03h
Description PDO Mapping object Number of assigned TxPDO
Access rw
Mapping PDO no
Value Range 1A02h: third Transmit PDO
Default Value 1A02h: third Transmit PDO
Sub-Index 04h
Description PDO Mapping object Number of assigned TxPDO
Access rw
Mapping PDO no
Value Range 1A03h: fourth Transmit PDO
Default Value 1A03h: fourth Transmit PDO

4 Interfaz EtherCAT
62 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
4.6.3 Objetos no compatibles en CoELa conexión del CMMP‐AS‐...‐M3/-M0 con “CANopen over EtherCAT” es incompatible con algunos ob
jetos CANopen que sí se encuentran disponibles en caso de conexión del CMMP‐AS‐...‐M3/-M0 a través
de CiA 402. En la tabla siguiente se muestran dichos objetos:
Identifier Nombre Significado
1008h Manufacturer Device Name (String) Nombre del equipo (no hay objeto)
1009h Manufacturer Hardware Version (String) Versión de hardware (no hay objeto)
100Ah Manufacturer Software Version (String) Versión de software (no hay objeto)
6089h position_notation_index Indica el número de puestos decimales
utilizados para visualizar los valores de
posición en el controlador. El objeto sólo sirve
como contenedor de datos. El firmware no
realiza una evaluación adicional.
608Ah position_dimension_index Indica la unidad utilizada para visualizar los
valores de posición en el controlador. El
objeto sólo sirve como contenedor de datos.
El firmware no realiza una evaluación
adicional.
608Bh velocity_notation_index Indica el número de puestos decimales
utilizados para visualizar los valores de
velocidad en el controlador. El objeto sólo sir
ve como contenedor de datos. El firmware no
realiza una evaluación adicional.
608Ch velocity_dimension_index Indica la unidad utilizada para visualizar los
valores de velocidad en el controlador. El ob
jeto sólo sirve como contenedor de datos. El
firmware no realiza una evaluación adicional.
608Dh acceleration_notation_index Indica el número de puestos decimales
utilizados para visualizar los valores de
aceleración en el controlador. El objeto sólo
sirve como contenedor de datos. El firmware
no realiza una evaluación adicional.
608Eh acceleration_dimension_index Indica la unidad utilizada para visualizar los
valores de aceleración en el controlador. El
objeto sólo sirve como contenedor de datos.
El firmware no realiza una evaluación adic
ional.
Tab. 4.8 Objetos de comunicación no compatibles
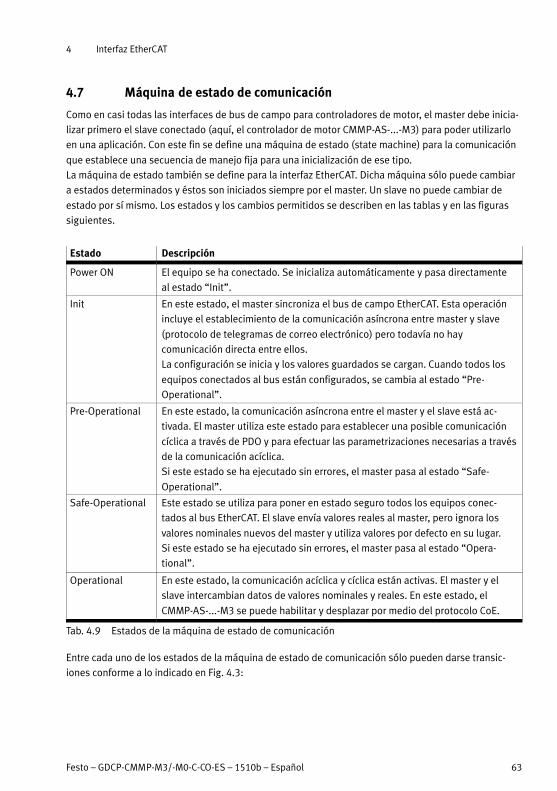
4 Interfaz EtherCAT
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 63
4.7 Máquina de estado de comunicación
Como en casi todas las interfaces de bus de campo para controladores de motor, el master debe inicia
lizar primero el slave conectado (aquí, el controlador de motor CMMP-AS-...-M3) para poder utilizarlo
en una aplicación. Con este fin se define una máquina de estado (state machine) para la comunicación
que establece una secuencia de manejo fija para una inicialización de ese tipo.
La máquina de estado también se define para la interfaz EtherCAT. Dicha máquina sólo puede cambiar
a estados determinados y éstos son iniciados siempre por el master. Un slave no puede cambiar de
estado por sí mismo. Los estados y los cambios permitidos se describen en las tablas y en las figuras
siguientes.
Estado Descripción
Power ON El equipo se ha conectado. Se inicializa automáticamente y pasa directamente
al estado “Init”.
Init En este estado, el master sincroniza el bus de campo EtherCAT. Esta operación
incluye el establecimiento de la comunicación asíncrona entre master y slave
(protocolo de telegramas de correo electrónico) pero todavía no hay
comunicación directa entre ellos.
La configuración se inicia y los valores guardados se cargan. Cuando todos los
equipos conectados al bus están configurados, se cambia al estado “Pre-
Operational”.
Pre-Operational En este estado, la comunicación asíncrona entre el master y el slave está ac
tivada. El master utiliza este estado para establecer una posible comunicación
cíclica a través de PDO y para efectuar las parametrizaciones necesarias a través
de la comunicación acíclica.
Si este estado se ha ejecutado sin errores, el master pasa al estado “Safe-
Operational”.
Safe-Operational Este estado se utiliza para poner en estado seguro todos los equipos conec
tados al bus EtherCAT. El slave envía valores reales al master, pero ignora los
valores nominales nuevos del master y utiliza valores por defecto en su lugar.
Si este estado se ha ejecutado sin errores, el master pasa al estado “Opera
tional”.
Operational En este estado, la comunicación acíclica y cíclica están activas. El master y el
slave intercambian datos de valores nominales y reales. En este estado, el
CMMP-AS-...-M3 se puede habilitar y desplazar por medio del protocolo CoE.
Tab. 4.9 Estados de la máquina de estado de comunicación
Entre cada uno de los estados de la máquina de estado de comunicación sólo pueden darse transic
iones conforme a lo indicado en Fig. 4.3:

4 Interfaz EtherCAT
64 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Init
Pre-Operational
Safe-Operational
Operational
(OI)
(OS)(SO)
(SI)
(PS)
(OP)
(PI)(IP)
(SP)
Fig. 4.3 Máquina de estado de comunicación
Las transiciones se describen individualmente en la tabla siguiente.
Transición de estado Estado
IP Inicio de la comunicación acíclica (protocolo de telegramas de correo elec
trónico).
PI Parada de la comunicación acíclica (protocolo de telegramas de correo elec
trónico).
PS Start Inputs Update: inicio de la comunicación cíclica (protocolo de teleg
ramas de datos de proceso). El slave envía valores reales al master. El slave
ignora los valores nominales del master y utiliza valores por defecto internos.
SP Stop Input Update: parada de la comunicación cíclica (protocolo de teleg
ramas de datos de proceso). El slave deja de enviar valores reales al master.
SO Start Output Update: el slave evalúa valores de referencia actuales del mas
ter.
OS Stop Output Update: el slave ignora los valores nominales del master y
utiliza valores por defecto internos.
OP Stop Output Update, Stop Input Update:
parada de la comunicación cíclica (protocolo de telegramas de datos de
proceso). El slave deja de enviar valores reales al master y el master deja de
enviar valores nominales al slave.

4 Interfaz EtherCAT
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 65
Transición de estado Estado
SI Stop Input Update, Stop Mailbox Communication:
parada de la comunicación cíclica (protocolo de telegramas de datos de
proceso) y parada de la comunicación acíclica (protocolo de telegramas de
correo electrónico). El slave deja de enviar valores reales al master y el mas
ter deja de enviar valores nominales al slave.
OI Stop Output Update , Stop Input Update, Stop Mailbox Communication:
parada de la comunicación cíclica (protocolo de telegramas de datos de
proceso) y parada de la comunicación acíclica (protocolo de telegramas de
correo electrónico). El slave deja de enviar valores reales al master y el mas
ter deja de enviar valores nominales al slave.
Tab. 4.10 Transiciones de estado
Además de los estados aquí presentados, en la máquina de estado EtherCAT se especifi
ca el estado “Bootstrap”. Este estado no está implementado para el controlador de mo
tor CMMP-AS-...-M3.
4.7.1 Diferencias entre las máquinas de estado de CANopen y EtherCATAl poner en funcionamiento el CMMP-AS-...-M3 a través del protocolo CoE EtherCAT, la máquina de
estados EtherCAT se utiliza en vez de la máquina de estado NMT CANopen. Ésta se diferencia de la
máquina de estados CANopen en algunos puntos. Las diferencias de comportamiento se exponen a
continuación:
– No hay una transición directa de Pre-Operational a Power On.
– No hay estado de parada, sino una transición directa al estado INIT.
– Estado adicional: Safe-Operational
En la tabla siguiente se contrastan los diferentes estados:
EtherCAT State CANopen NMT State
Power ON Power-On (inicialización)
Init Stopped
Safe-Operational –
Operational Operacional
Tab. 4.11 Comparación de los estados en EtherCAT y CANopen
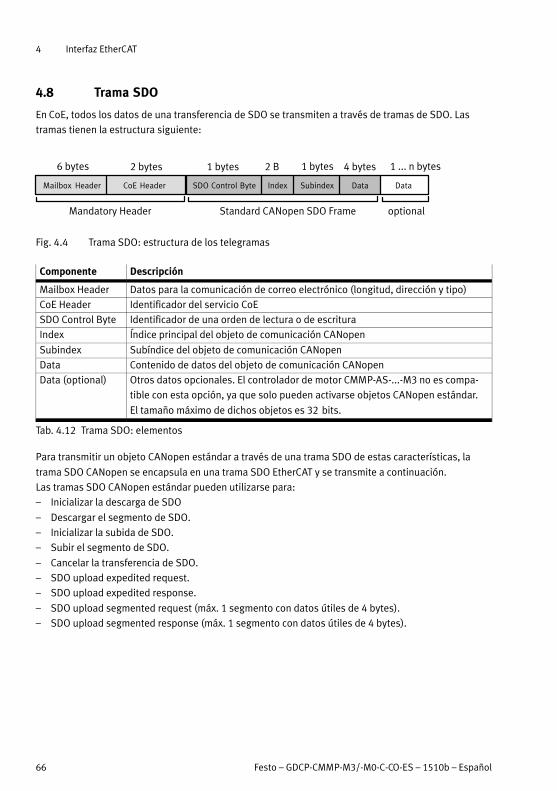
4 Interfaz EtherCAT
66 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
4.8 Trama SDO
En CoE, todos los datos de una transferencia de SDO se transmiten a través de tramas de SDO. Las
tramas tienen la estructura siguiente:
6 bytes 2 bytes 1 bytes 2 B 4 bytes 1 ... n bytes1 bytes
Mailbox Header CoE Header SDO Control Byte Index Subindex Data Data
Mandatory Header Standard CANopen SDO Frame optional
Fig. 4.4 Trama SDO: estructura de los telegramas
Componente Descripción
Mailbox Header Datos para la comunicación de correo electrónico (longitud, dirección y tipo)
CoE Header Identificador del servicio CoE
SDO Control Byte Identificador de una orden de lectura o de escritura
Index Índice principal del objeto de comunicación CANopen
Subindex Subíndice del objeto de comunicación CANopen
Data Contenido de datos del objeto de comunicación CANopen
Data (optional) Otros datos opcionales. El controlador de motor CMMP-AS-...-M3 no es compa
tible con esta opción, ya que solo pueden activarse objetos CANopen estándar.
El tamaño máximo de dichos objetos es 32 bits.
Tab. 4.12 Trama SDO: elementos
Para transmitir un objeto CANopen estándar a través de una trama SDO de estas características, la
trama SDO CANopen se encapsula en una trama SDO EtherCAT y se transmite a continuación.
Las tramas SDO CANopen estándar pueden utilizarse para:
– Inicializar la descarga de SDO
– Descargar el segmento de SDO.
– Inicializar la subida de SDO.
– Subir el segmento de SDO.
– Cancelar la transferencia de SDO.
– SDO upload expedited request.
– SDO upload expedited response.
– SDO upload segmented request (máx. 1 segmento con datos útiles de 4 bytes).
– SDO upload segmented response (máx. 1 segmento con datos útiles de 4 bytes).

4 Interfaz EtherCAT
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 67
El controlador de motor CMMP-AS-...-M3 es compatible con todos los tipos de transferen
cia indicados más arriba.
Puesto que cuando se utiliza la implementación CoE del CMMP-AS-...-M3 solo se pueden
activar objetos CANopen estándar cuyo tamaño está limitado a 32 bits (4 bytes), única
mente son compatibles los tipos de transferencias con una longitud máxima de datos de
hasta 32 bits (4 bytes).
4.9 Trama PDO
Los objetos de datos de proceso (PDO) sirven para efectuar la transmisión cíclica de datos de valores
nominales y reales entre master y slave. El master los debe configurar en el estado “Pre-Operational”
antes de poner en funcionamiento el slave. A continuación se transmiten en tramas PDO. Las tramas
tienen la estructura siguiente:
En CoE, todos los datos de una transferencia de PDO se transmiten a través de tramas PDO. Las tramas
tienen la estructura siguiente:
Process Data Process Data
1 ... n bytes 1 ... n bytes
Standard CANopen PDO Frame optional
Fig. 4.5 Trama PDO: estructura de los telegramas
Componente Descripción
Process Data Contenido de los datos del PDO (Process Data Object)
Process Data
(optional)
Contenido de datos opcionales de otros PDO
Tab. 4.13 Trama PDO: elementos
Para transmitir un PDO a través del protocolo CoE EtherCAT, los PDO de transmisión y PDO de recepción
se deben asignar a un canal de transmisión del Sync Manager, además de a la configuración de PDO
(PDO Mapping) (� capítulo 4.6.1 “Configuración de la interfaz de comunicación”). El intercambio de
datos de PDO para el controlador de motor CMMP-AS-...-M3 tiene lugar exclusivamente a través del
protocolo de telegramas de datos de proceso EtherCAT.
El controlador de motor CMMP-AS-...-M3 no es compatible con la transmisión de los da
tos de proceso CANopen (PDO) a través de la comunicación acíclica (protocolo de tele
gramas de correo electrónico).
Puesto que en el controlador de motor CMMP-AS-...-M3 todos los datos intercambiados a través del
protocolo CoE EtherCAT se envían directamente a la implementación CANopen interna, el PDO también

4 Interfaz EtherCAT
68 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
se mapea de la manera descrita en el capítulo 3.3 “PDO-Message”. En la figura siguiente se muestra el
procedimiento:
Index Sub
6TTTh
Object Contents
6WWWh
6YYYh
6XXXh
6VVVh
6UUUh
6ZZZh
1ZZZh
1ZZZh
1ZZZh
01h
02h
03h
6TTTh TTh
6UUUh UUh
6WWWh WWh
8
16
8
YYh
XXh
WWh
VVh
UUh
TTh
ZZh
Object A
Object D
Object C
Object B
Object E
Object F
Object G
Map
ping
Obj
ect
App
licat
ion
Obj
ect
Object Dictionary
Object A Object B Object D
PDO Length: 32 bit
PDO1
Fig. 4.6 Asignación de PDO
Al transmitir los datos recibidos a través de CoE al protocolo CANopen implementado en el
CMMP-AS-...-M3, la asignación de los objetos CANopen y los tipos de transmisión (Transmission Types)
disponibles de los PDO para el CMMP-AS-...-M3 pueden utilizarse para los PDO que quieran
parametrizarse.
El controlador de motor CMMP-AS-...-M3 también es compatible con el tipo de transmisión “Sync
Message”, aunque no es necesario transmitir el mensaje de sincronización a través de EtherCAT.
Para aceptar los datos se utiliza la llegada del telegrama o el impulso de sincronización de hardware
del mecanismo “Distributed Clocks” (véase abajo).
La interfaz EtherCAT para CMMP-AS-...-M3 es compatible, mediante el empleo de un módulo FPGA
ESC20, con una sincronización a través del mecanismo especificado en EtherCAT de los “Distributed
Clocks” (relojes distribuidos). El regulador de corriente del controlador de motor CMMP-AS-...-M3 se
sincroniza a esta frecuencia y se evalúan o envían los objetos de datos de proceso configurados corres
pondientes.
El controlador de motor CMMP-AS-...-M3 con interfaz EtherCAT es compatible con las funciones
siguientes:
– Telegrama cíclico de trama PDO mediante el protocolo de telegramas de datos de proceso.
– Telegrama síncrono de trama PDO mediante el protocolo de telegramas de datos de proceso.
El controlador de motor CMMP-AS-...-M3 con interfaz EtherCAT es compatible con cuatro PDO de recep
ción (RxPDO) y cuatro PDO de transmisión (TxPDO).
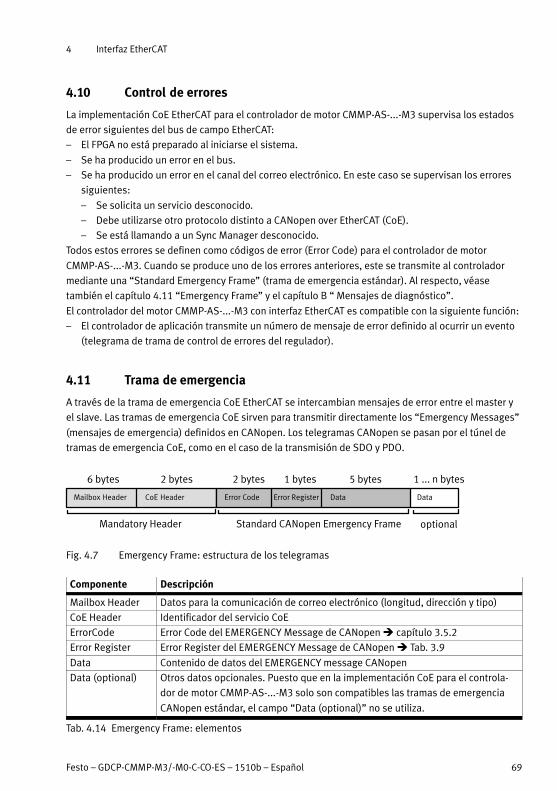
4 Interfaz EtherCAT
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 69
4.10 Control de errores
La implementación CoE EtherCAT para el controlador de motor CMMP-AS-...-M3 supervisa los estados
de error siguientes del bus de campo EtherCAT:
– El FPGA no está preparado al iniciarse el sistema.
– Se ha producido un error en el bus.
– Se ha producido un error en el canal del correo electrónico. En este caso se supervisan los errores
siguientes:
– Se solicita un servicio desconocido.
– Debe utilizarse otro protocolo distinto a CANopen over EtherCAT (CoE).
– Se está llamando a un Sync Manager desconocido.
Todos estos errores se definen como códigos de error (Error Code) para el controlador de motor
CMMP-AS-...-M3. Cuando se produce uno de los errores anteriores, este se transmite al controlador
mediante una “Standard Emergency Frame” (trama de emergencia estándar). Al respecto, véase
también el capítulo 4.11 “Emergency Frame” y el capítulo B “ Mensajes de diagnóstico”.
El controlador del motor CMMP-AS-...-M3 con interfaz EtherCAT es compatible con la siguiente función:
– El controlador de aplicación transmite un número de mensaje de error definido al ocurrir un evento
(telegrama de trama de control de errores del regulador).
4.11 Trama de emergencia
A través de la trama de emergencia CoE EtherCAT se intercambian mensajes de error entre el master y
el slave. Las tramas de emergencia CoE sirven para transmitir directamente los “Emergency Messages”
(mensajes de emergencia) definidos en CANopen. Los telegramas CANopen se pasan por el túnel de
tramas de emergencia CoE, como en el caso de la transmisión de SDO y PDO.
6 bytes 2 bytes 1 bytes2 bytes 5 bytes 1 ... n bytes
Mandatory Header Standard CANopen Emergency Frame optional
Mailbox Header CoE Header Error Code Error Register Data Data
Fig. 4.7 Emergency Frame: estructura de los telegramas
Componente Descripción
Mailbox Header Datos para la comunicación de correo electrónico (longitud, dirección y tipo)
CoE Header Identificador del servicio CoE
ErrorCode Error Code del EMERGENCY Message de CANopen � capítulo 3.5.2
Error Register Error Register del EMERGENCY Message de CANopen � Tab. 3.9
Data Contenido de datos del EMERGENCY message CANopen
Data (optional) Otros datos opcionales. Puesto que en la implementación CoE para el controla
dor de motor CMMP-AS-...-M3 solo son compatibles las tramas de emergencia
CANopen estándar, el campo “Data (optional)” no se utiliza.
Tab. 4.14 Emergency Frame: elementos

4 Interfaz EtherCAT
70 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Dado que en este caso también tiene lugar una simple entrega al protocolo CANopen implementado en
el controlador del motor de los “Emergency Messages” recibidos y enviados a través de CoE, todos los
mensajes de error se pueden consultar en el capítulo B.
4.12 Archivo de descripción de equipos XML
Para poder conectar equipos slave EtherCAT a un master EtherCAT, cada slave EtherCAT deberá dis
poner de su archivo de descripción correspondiente. El archivo de descripción es equiparable a los
archivos EDS para el sistema de bus de campo CANopen o a los archivos GSD de Profibus. A diferencia
de estos archivos, la descripción de EtherCAT tiene el formato XML, utilizado con frecuencia en aplicac
iones web e Internet, y contiene la información relativa a las características siguientes del slave
EtherCAT:
– Datos del fabricante del equipo.
– Nombre, tipo y versión del equipo.
– Tipo y número de versión del protocolo que se debe utilizar para este equipo (p. ej., CANopen over
Ethernet, etc.)
– Parametrización del equipo y configuración de los datos de proceso.
Este archivo contiene la parametrización completa del slave, con la parametrización del Sync Manager
y de los objetos de datos de proceso incluidos. Por esta razón, la configuración del slave puede
modificarse con este archivo.
Festo ha confeccionado un archivo de descripción de equipos de estas características para el controla
dor de motor CMMP-AS-...-M3. Se puede descargar de la página web de Festo. Seguidamente explica
mos el contenido de este archivo con más detalle para que el usuario pueda adaptarlo a su aplicación.
En los archivos disponibles de descripción de equipos se admite el uso tanto del perfil CiA 402 como
del perfil FHPP mediante módulos seleccionables por separado.
El archivo XML está incluido en el CD-ROM suministrado con el controlador de motor.
Archivo XML Descripción
Festo_CMMP-AS_V4p0_FHPP.xml Controlador de motor CMMP-AS-..-M3 con protocolo
“FHPP”
Festo_CMMP-AS_V4p0_CIA402_IP7.xml Controlador de motor CMMP-AS-..-M3 con protocolo
“CiA 402”
Tab. 4.15 Archivo XML
Hallará las versiones más actuales en � www.festo.com/sp
4.12.1 Estructura básica del archivo de descripción de equiposEl archivo de descripción de equipos EtherCAT está en formato XML. Este formato tiene la ventaja de
que puede leerse y editarse con un editor de textos estándar. Un archivo XML describe siempre una
estructura de árbol. Las ramificaciones se definen con nodos. Estos nodos disponen de una marca de
inicio y otra de fin. Dentro de un nodo puede haber un número ilimitado de subnodos.

4 Interfaz EtherCAT
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 71
EJEMPLO: Explicación rápida de la estructura básica de un archivo XML:
<EtherCATInfo Version=“0.2“>
<Vendor>
<Id>#x1D</Id>
<Name>Festo AG</Name>
<ImageData16x14>424DD60200......</ImageData16x14>
</Vendor>
<Descriptions>
<Groups>
<Group SortOrder=“1“>
<Type>Festo Electric-Drives</Type>
<Name LcId=“1033“>Festo Electric-Drive</Name>
</Group>
</Groups>
<Devices>
<Device Physics=“YY“>
</Device>
</Devices>
</Descriptions>
</EteherCATInfo>
Para estructurar un archivo XML se deben observar las reglas breves siguientes:
– Cada nodo tiene un nombre inequívoco.
– Cada nodo se abre con <nombre de nodo> y se cierra con </nombre de nodo>.
El archivo de descripción de equipos para el controlador de motor CMMP-AS-...-M3 con CoE EtherCAT
se estructura en los puntos siguientes:
Nombre del nodo Significado Adaptable
Vendor Este nodo contiene el nombre y el ID del fabricante del eq
uipo al que pertenece el mismo archivo de descripción.
Además, incluye el código binario de un mapa de bits con el
logograma del fabricante.
No
Description Este punto incluye la descripción del equipo propiamente
dicha con su configuración e inicialización.
Parcialmente
Group Este nodo incluye la asignación del equipo a un grupo de
equipos. Estos grupos son fijos y el usuario no debe
modificarlos.
No
Devices Este punto incluye la descripción del equipo. Parcialmente
Tab. 4.16 Nodos de los archivos de descripción de equipos
En la tabla siguiente se describen exclusivamente los subnodos del nodo “Descriptions” necesarios
para parametrizar el controlador de motor CMMP-AS-...-M3 con CoE. El resto de los nodos son fijos y el
usuario no debe modificarlos.
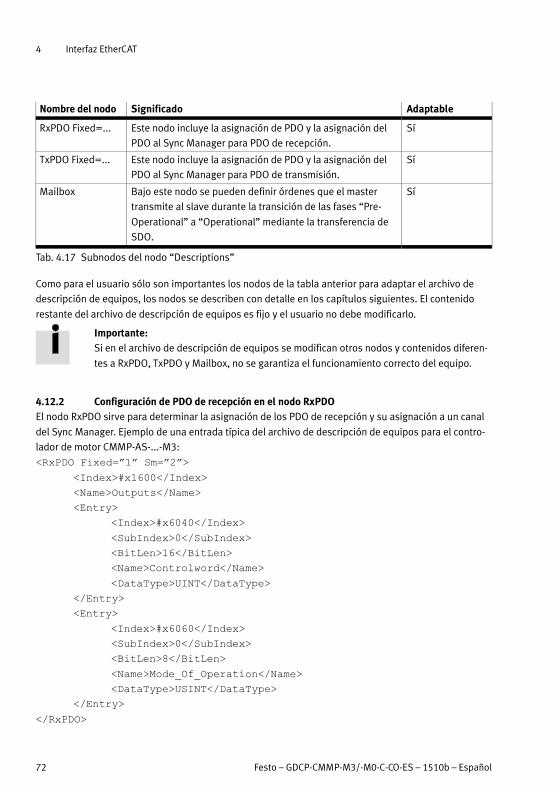
4 Interfaz EtherCAT
72 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Nombre del nodo Significado Adaptable
RxPDO Fixed=... Este nodo incluye la asignación de PDO y la asignación del
PDO al Sync Manager para PDO de recepción.
Sí
TxPDO Fixed=... Este nodo incluye la asignación de PDO y la asignación del
PDO al Sync Manager para PDO de transmisión.
Sí
Mailbox Bajo este nodo se pueden definir órdenes que el master
transmite al slave durante la transición de las fases “Pre-
Operational” a “Operational” mediante la transferencia de
SDO.
Sí
Tab. 4.17 Subnodos del nodo “Descriptions”
Como para el usuario sólo son importantes los nodos de la tabla anterior para adaptar el archivo de
descripción de equipos, los nodos se describen con detalle en los capítulos siguientes. El contenido
restante del archivo de descripción de equipos es fijo y el usuario no debe modificarlo.
Importante:Si en el archivo de descripción de equipos se modifican otros nodos y contenidos diferen
tes a RxPDO, TxPDO y Mailbox, no se garantiza el funcionamiento correcto del equipo.
4.12.2 Configuración de PDO de recepción en el nodo RxPDOEl nodo RxPDO sirve para determinar la asignación de los PDO de recepción y su asignación a un canal
del Sync Manager. Ejemplo de una entrada típica del archivo de descripción de equipos para el contro
lador de motor CMMP-AS-...-M3:
<RxPDO Fixed=”1” Sm=”2”>
<Index>#x1600</Index>
<Name>Outputs</Name>
<Entry>
<Index>#x6040</Index>
<SubIndex>0</SubIndex>
<BitLen>16</BitLen>
<Name>Controlword</Name>
<DataType>UINT</DataType>
</Entry>
<Entry>
<Index>#x6060</Index>
<SubIndex>0</SubIndex>
<BitLen>8</BitLen>
<Name>Mode_Of_Operation</Name>
<DataType>USINT</DataType>
</Entry>
</RxPDO>

4 Interfaz EtherCAT
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 73
Como se advierte en el ejemplo anterior, en una entrada de ese tipo la asignación total de los PDO de
recepción se describe de modo detallado. El primer bloque grande indica el número de objeto del PDO
y su tipo. A continuación, le sigue una lista con todos los objetos CANopen que deben mapearse en el
objeto de datos de proceso.
En la tabla siguiente se describe con más detalle cada una de las entradas:
Nombre del nodo Significado Adaptable
RxPDO
Fixed=“1”
Sm=“2”
Este nodo describe directamente la estructura del PDO de recep
ción y su asignación al Sync Manager. La entrada Fixed=“1” indica
que el mapeado del objeto no se puede modificar. La entrada
Sm=“2” indica que el PDO se debe asignar al canal Sync 2 del Sync
Manager.
No
Index Esta entrada incluye el número de objeto del PDO. Aquí se con
figura el primer PDO de recepción en el número de objeto 0x1600.
Sí
Name El nombre indica si el PDO es de recepción (Outputs) o de
transmisión (Inputs).
Para un Receive PDO, este valor siempre debe estar en “Output”.
No
Entry El nodo Entry incluye un objeto CANopen que debe mapearse en el
objeto de datos de proceso. Un nodo Entry incluye el índice y el
subíndice del objeto CANopen que debe mapearse, además de su
nombre y tipo de dato.
Sí
Tab. 4.18 Elementos del nodo “RxPDO”
El orden y el mapeado de cada uno de los objetos CANopen para el PDO coincide con el orden en que
han sido introducidos en el archivo de descripción de equipos mediante las entradas “Entry”. En la
tabla siguiente se indican todos los subpuntos de un nodo “Entry”:
Nombre del nodo Significado Adaptable
Index Esta entrada indica el índice del objeto CANopen que debe
mapearse en el objeto de datos de proceso.
Sí
Subindex Esta entrada indica el subíndice del objeto CANopen que se debe
mapear.
Sí
BitLen Esta entrada indica en bits el tamaño del objeto que debe
mapearse. Esta entrada debe coincidir siempre con el tipo de
objeto que debe mapearse. Permitidos: 8 bits / 16 bits / 32 bits.
Sí
Name Esta entrada indica el nombre, en forma de cadena de caracteres,
del objeto que debe mapearse.
Sí
Data Type Esta entrada indica el tipo de datos del objeto que debe mapearse.
Se puede consultar para cada objeto CANopen en la descripción
correspondiente.
Sí
Tab. 4.19 Elementos del nodo “Entry”

4 Interfaz EtherCAT
74 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
4.12.3 Configuración del PDO de transmisión en el nodo TxPDOEl nodo TxPDO sirve para determinar la asignación de los PDO de transmisión y su asignación a un canal
del Sync Manager. La configuración coincide con la de los Receive PDO descrita en la sección 4.12.2
“Configuración de los Receive PDO en el nodo RxPDO” a diferencia de que el nodo “Name” del PDO se
debe ajustar al valor “Inputs” en vez de “Outputs”.
4.12.4 Órdenes de inicialización a través del nodo “Mailbox”
El nodo “Mailbox” del archivo de descripción de equipos sirve para describir objetos CANopen a través
del master en el slave durante la fase de inicialización. Las órdenes y los objetos que se deben describir
aquí se determinan mediante entradas especiales. En dichas entradas se determina la transición de
fase en la que debe describirse este valor. Además, esta entrada incluye el número de objeto (índice y
subíndice), el valor de datos que se debe escribir y un comentario.
Formato de una entrada típica:
<InitCmd>
<Transition>PS</Transition>
<Index#x6060</Index>
<SubIndex>0</SubIndex>
<Data>03</Data>
<Comment>velocity mode</Comment>
</InitCmd>
En el ejemplo anterior, el modo de funcionamiento en el objeto “modes_of_operation” se ajusta a
“regulación de la velocidad” durante la transición de estado PS de “Pre-Operational” a “Safe Operat
ional”. Significado de los subnodos:
Nombre del nodo Significado Adaptable
Transition Nombre de la transición de estado en cuya aparición se
debe ejecutar esta orden (� capítulo 4.7
“Máquina de estado de comunicación”)
Sí
Index Índice del objeto CANopen que debe escribirse. Sí
Subindex Subíndice del objeto CANopen que debe escribirse. Sí
Data Valor de datos que debe escribirse en forma de valor he
xadecimal.
Sí
Comment Comentario relativo a la orden. Sí
Tab. 4.20 Elementos del nodo “InitCmd”
Importante:En un archivo de descripción de equipos para el controlador de motor CMMP-AS-...-M3 ya
existen algunas entradas en esta sección. Es obligatorio mantener estas entradas y el
usuario no debe modificarlas.

4 Interfaz EtherCAT
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 75
4.13 Sincronización (Distributed Clocks)
En EtherCAT, la sincronización temporal se efectúa a través de los denominados “relojes distribuidos”
(Distributed Clocks). Cada slave EtherCAT incluye un reloj de tiempo real que el clock master sincroniza
en todos los slaves durante la fase de inicialización. A continuación, los relojes se atrasan en todos los
slaves durante el funcionamiento. El clock master es el primer slave de la red.
De este modo existe una base temporal unificada en todo el sistema a la que cada uno de los slaves
puede sincronizarse. Los telegramas de sincronización diseñados para este fin en CANopen, se
eliminan en CoE.
El FPGA ESC20 utilizado en el controlador de motor CMMP-AS-...-M3 es compatible con los Distributed
Clocks. Ello permite sincronizar el tiempo con gran exactitud. El tiempo de ciclo de la trama EtherCAT
debe adaptarse exactamente al tiempo de ciclo tp del interpolador interno del regulador. Si es neces
ario, el tiempo del interpolador debe adaptarse mediante el objeto incluido en el archivo de descripción
de equipos.
En la última implementación también es posible una recepción síncrona de datos de PDO sin relojes
distribuidos y una sincronización de los PLL internos del regulador a las tramas síncronas de EtherCAT.
Para ello, el firmware utiliza la llegada de la trama EtherCAT como base temporal.
Restricciones:
– El master debe poder enviar las tramas EtherCAT con una inestabilidad muy reducida (<70 % del
tiempo de ciclo del regulador de corriente ajustado).
– El tiempo de ciclo de la trama EtherCAT debe adaptarse exactamente al tiempo de ciclo tp del inter
polador interno del regulador.
– La Ethernet debe estar reservada en exclusiva para la trama EtherCAT. Si es necesario, otros teleg
ramas deben sincronizarse con el barrido y no deben bloquear el bus.
5 Ajustar parámetros
76 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
5 Ajustar parámetrosAntes de que el controlador de motor pueda ejecutar la tarea deseada (regulación de par o de
velocidad, posicionamiento), numerosos parámetros del controlador de motor deben ser adaptados al
motor utilizado y a la aplicación específica. El ajuste de los parámetros debe realizarse siguiendo el
orden de los capítulos que siguen. Después del ajuste de los parámetros se describen el control del
dispositivo y el uso de los modos de funcionamiento correspondientes.
El display del controlador de motor muestra una “A” (Attention) cuando el controlador de
motor aún no está parametrizado adecuadamente. Si el controlador del motor se debe
parametrizar por completo mediante CANopen, se debe describir el objeto 6510h_C0h
para eliminar esta indicación (� página 153).
Además de los parámetros descritos aquí detalladamente, en el directorio de objetos del controlador
de motor hay más parámetros, que deben implementarse según CANopen. En general no contienen
información que pueda ser utilizada eficientemente para la estructura de una aplicación con un contro
lador de motor CMMP‐AS‐...‐M3/-M0. En caso necesario, consultar las especificaciones de CiA.
5.1 Cargar y guardar conjuntos de parámetros
Cuadro generalEl controlador de motor dispone de tres conjuntos de parámetros:
– Conjunto de parámetros actual
Este conjunto de parámetros se encuentra en la memoria volátil (RAM) del controlador del motor.
Puede leerse y escribirse a voluntad con el software de parametrización o a través del bus CAN.
Al conectar el controlador de motor, el conjunto de parámetros de la aplicación se copia en el con
junto de parámetros actual .
– Conjunto de parámetros por defectoÉste es el conjunto invariable de parámetros preestablecido de forma estándar por el fabricante
para el controlador del motor. Mediante un proceso de lectura en el objeto CANopen 1011h_01h
(restore_all_default_parameters) se puede copiar el conjunto de parámetros predeterminado en el
conjunto de parámetros actual. Este proceso de copia sólo es posible cuando el paso de salida está
desactivado.
– Conjunto de parámetros de aplicaciónEl conjunto de parámetros actual se puede guardar en la memoria flash no volátil. El proceso de
almacenamiento se inicia con un acceso de escritura al objeto CANopen 1010h_01h
(save_all_parameters). Al conectar el controlador de motor se copia automáticamente el conjunto
de parámetros de la aplicación en el conjunto de parámetros actual.

5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 77
La siguiente gráfica ilustra las relaciones entre cada uno de los conjuntos de parámetros.
ObjetoCANopen
1011
Conectarel
regulador
ObjetoCANopen
1010
Conjunto de parámetros pordefecto
Conjunto de parámetrosde aplicación
Conjunto de parámetrosactual
Fig. 5.1 Relaciones de conjuntos de parámetros
Hay dos conceptos distintos posibles para la gestión de los conjuntos de parámetros:
1. El conjunto de parámetros se crea y se transfiere por completo a los controladores individuales con
el software de parametrización. En este proceso sólo deben ajustarse, mediante el bus CAN, los
objetos que son accesibles exclusivamente a través de CANopen. Esto comporta la desventaja de
que para cada puesta a punto de una máquina nueva o en caso de reparación (cambio del con
trolador) se necesita el software de parametrización.
2. Esta variante se basa en el hecho de que la mayoría de conjuntos de parámetros específicos de la
aplicación tan sólo difieren en unos pocos parámetros del conjunto de parámetros por defecto. Por
eso es posible que el conjunto de parámetros actual se ajuste de nuevo a través del bus CAN tras
cada conexión de la instalación. Para ello primero se carga el conjunto de parámetros
predeterminado desde el control de nivel superior (llamada del objeto CANopen 1011h_01h
(restore_all_default_parameters). Después se transfieren sólo los objetos diferentes. El proceso
completo dura menos de 1 segundo por controlador. La ventaja de este proceso es que funciona
también en controladores no parametrizados, de modo que la puesta a punto de instalaciones
nuevas o el cambio de un controlador no son problemáticos y no se necesita el software de
parametrización.
AdvertenciaAntes de conectar por primera vez el paso de salida, asegurarse de que el controlador
contiene realmente los parámetros deseados.
Un controlador parametrizado incorrectamente puede girar incontroladamente y causar
daños personales o materiales.

5 Ajustar parámetros
78 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Descripción de los objetosObjeto 1011h: restore_default_parameters
Index 1011h
Name restore_parameters
Object Code ARRAY
No. of Elements 1
Data Type UINT32
Sub-Index 01h
Description restore_all_default_parameters
Access rw
Mapping PDO no
Units –
Value Range 64616F6Ch (“load”)
Default Value 1 (read access)
Signature MSB LSB
ASCII d a o l
Hex. 64h 61h 6Fh 6Ch
Tab. 5.1 Ejemplo para texto ASCII “load”
El objeto 1011h_01h (restore_all_default_parameters) permite poner el conjunto de parámetros actual
en un estado definido. Para ello se copia el conjunto de parámetros predeterminado en el conjunto de
parámetros actual. El proceso de copia se inicia mediante un acceso de lectura a este objeto en el que
debe transferirse como registro de datos la cadena “load” en forma hexadecimal.
La ejecución de esta orden sólo se permite si el paso de salida está desactivado. Si no es así, se genera
el error SDO “Los datos no pueden transferirse o guardarse porque el controlador de motor no se en
cuentra en el estado correcto” Si se envía una identificación incorrecta, se genera el error “Los datos no
pueden transferirse o guardarse los datos”. Si se efectúa un acceso de lectura al objeto, se devuelve
un 1 para indicar que la reposición de los valores por defecto es compatible.
Los parámetros de la comunicación CAN (número de nodo, velocidad de transmisión y modo de fun
cionamiento) así como numerosos ajustes del transmisor de ángulo (que en parte requieren un reset
para ser efectivos) permanecen inalterados.
Objeto 1010h: store_parameters
Index 1010h
Name store_parameters
Object Code ARRAY
No. of Elements 1
Data Type UINT32
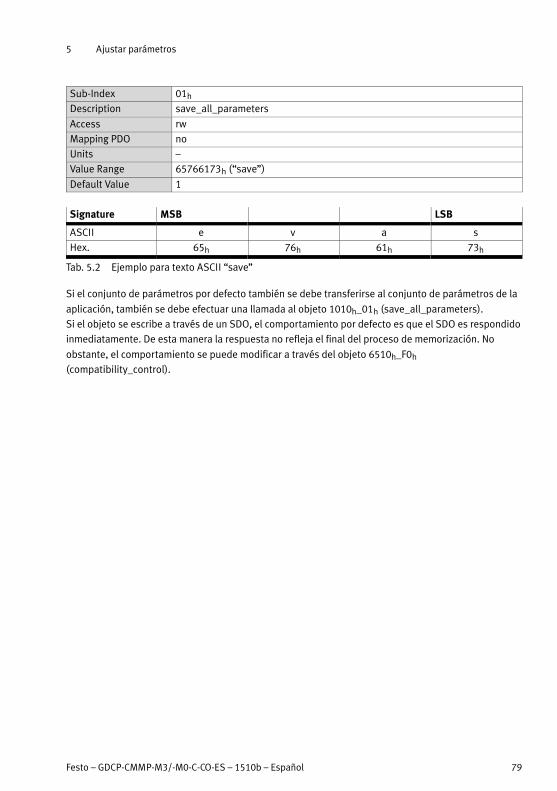
5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 79
Sub-Index 01h
Description save_all_parameters
Access rw
Mapping PDO no
Units –
Value Range 65766173h (“save”)
Default Value 1
Signature MSB LSB
ASCII e v a s
Hex. 65h 76h 61h 73h
Tab. 5.2 Ejemplo para texto ASCII “save”
Si el conjunto de parámetros por defecto también se debe transferirse al conjunto de parámetros de la
aplicación, también se debe efectuar una llamada al objeto 1010h_01h (save_all_parameters).
Si el objeto se escribe a través de un SDO, el comportamiento por defecto es que el SDO es respondido
inmediatamente. De esta manera la respuesta no refleja el final del proceso de memorización. No
obstante, el comportamiento se puede modificar a través del objeto 6510h_F0h
(compatibility_control).

5 Ajustar parámetros
80 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
5.2 Ajustes de compatibilidad
Cuadro general
Para conservar la compatibilidad con las implementaciones anteriores de CANopen (p. ej., en otras
familias de equipos) y poder ejecutar cambios y correcciones respecto a CiA 402 y CiA 301, se ha
añadido el objeto compatibility_control. En el conjunto de parámetros por defecto este objeto entrega
un 0, es decir, compatibilidad con las versiones anteriores. Para nuevas aplicaciones recomendamos
activar los bits definidos para permitir una concordancia lo más alta posible con los estándars men
cionados.
Descripción de los objetosObjetos tratados en este capítulo
Index Objeto Nombre Tipo Attr.
6510_F0h VAR compatibility_control UINT16 rw
Objeto 6510h_F0h: compatibility_control
Sub-Index F0h
Description compatibility_control
Data Type UINT16
Access rw
Mapping PDO no
Units –
Value Range 0 … 1FFh, � tabla
Default Value 0

5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 81
Bit Valor Nombre
0 0001h homing_method_scheme El bit tiene el mismo significado que el bit 2 y existe por
motivos de compatibilidad. Si se activa el bit 2 se activa
también este bit y viceversa.
1 0002h reserved El bit está reservado. No se debe activar.
2 0004h homing_method_scheme Si este bit está activado, significa que los métodos del
recorrido de referencia 32 … 35 están numerados en
conformidad con CiA 402; de lo contrario, la numeración es
compatible con las implementaciones anteriores.
(� también cap. 7.2.3). Si este bit se activa también se
activa el bit 0, y viceversa.
3 0008h reserved El bit está reservado. No se debe activar.
4 0010h response_after_save Si este bit está activado, la respuesta a
save_all_parameters se envía sólo después de que la
memorización haya concluido. Esto puede tardar algunos
segundos y, dado el caso, ocasionar un time-out en el
control. Si el bit está borrado, se responde
inmediatamente; no obstante debe tenerse en cuenta que
el proceso de memorización aún no ha concluido.
5 0020h reserved El bit está reservado. No se debe activar.
6 0040h homing_to_zero Hasta ahora un recorrido de referencia bajo CANopen sólo
consta de 2 fases (recorrido de búsqueda y recorrido
lento). A continuación el accionamiento no se mueve hacia
la posición cero determinada (que, p. ej., puede haber sido
desplazada por el homing_offset hasta la posición de
referencia encontrada).
Si se activa este bit, este comportamiento estándar se
modifica y el accionamiento añade un recorrido a cero a
continuación del recorrido de referencia. � al respecto el
cap. 7.2 Modo de funcionamiento Recorrido de referencia
(Homing Mode)
7 0080h device_control Cuando este bit está activado, el bit 4 del statusword
(voltage_enabled) se emite en conformidad con CiA 402
v2.0. Además el estado FAULT_REACTION_ACTIVE se puede
distinguir del estado FAULT. � al respecto el capítulo 6
8 0100h reserved El bit está reservado. No se debe activar.

5 Ajustar parámetros
82 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
5.3 Factores de conversión (Factor Group)
Cuadro general
Los controladores del motor se usan en gran cantidad de aplicaciones: como accionamiento directo,
con reductor postconectado, para actuadores lineales, etc. A fin de posibilitar una parametrización
sencilla para todas estas aplicaciones, el controlador del motor se puede parametrizar con ayuda del
Factor Group de manera que el usuario pueda introducir o leer todas las variables, como, p. ej.,
la velocidad, directamente en las unidades deseadas en la salida de potencia (p. ej., en un eje lineal
valores de posición en milímetros y velocidades en milímetros por segundo). El controlador del motor
convierte a continuación las entradas con ayuda del Factor Group en sus unidades internas. Existe un
factor de conversión para cada variable física (posición, velocidad y aceleración) para adaptar las
unidades del usuario a la aplicación propia. Las unidades configuradas por el Factor Group se
denominan en general position_units, speed_units o acceleration_units. El esquema siguiente muestra
el funcionamiento del Factor Group:
Position Factor
Posición
Factor GroupUnidades delusuario
Unidades internasdel regulador
Unidades deposición
Unidades develocidad
±1
position_polarity_flag
Unidades deaceleración
±1
Velocity Factor
Velocidad±1
velocity_polarity_flag
±1
Acceleration Factor
Aceleración
Incrementos (Inc.)
1�revolución4096 min
1�revolución�� min256 sec
Fig. 5.2 Factor Group
En principio todos los parámetros se graban en el controlador de motor con sus unidades internas y son
convertidos mediante el Factor Group sólo durante la escritura o la lectura.
Por este motivo el Factor Group debe ajustarse antes de la primera parametrización y no se debe
modificar durante una parametrización.
Por rutina, el Factor Group se ajusta en las siguientes unidades:
Tamaño Denominación Unidad Explicación
Longitud Unidades de posición Incrementos 65536 incrementos por revolución
Velocidad Unidades de velocidad min-1 Revoluciones por minuto
Aceleración Unidades de aceleración (min-1)/s Aumento de la velocidad por segundo
Tab. 5.3 Valor predeterminado del “Factor Group”

5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 83
Descripción de los objetosObjetos tratados en este capítulo
Index Objeto Nombre Tipo Attr.
607Eh VAR polarity UINT8 rw
6093h ARRAY position_factor UINT32 rw
6094h ARRAY velocity_encoder_factor UINT32 rw
6097h ARRAY acceleration_factor UINT32 rw
Objeto 6093h: position_factorEl objeto position_factor sirve para convertir todas las unidades de longitud de la aplicación y pasarlas
de las position_units a la unidad interna incrementos (65536 incrementos equivalen a 1 revolución).
Está formado por numeradores y denominadores.
Motor Caja de cambios
EjeMotor con engranaje
RIN
ROUT
x en unidades deposición (p. ej., “mm”)
x en unidades de posición(p. ej., “grados”)
Fig. 5.3 Cálculo de las unidades de posición
Index 6093h
Name position_factor
Object Code ARRAY
No. of Elements 2
Data Type UINT32
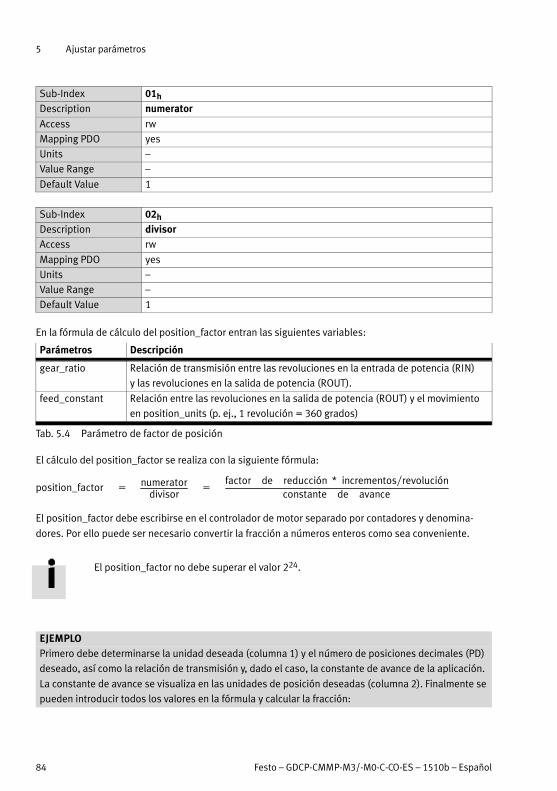
5 Ajustar parámetros
84 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Sub-Index 01h
Description numerator
Access rw
Mapping PDO yes
Units –
Value Range –
Default Value 1
Sub-Index 02h
Description divisorAccess rw
Mapping PDO yes
Units –
Value Range –
Default Value 1
En la fórmula de cálculo del position_factor entran las siguientes variables:
Parámetros Descripción
gear_ratio Relación de transmisión entre las revoluciones en la entrada de potencia (RIN)
y las revoluciones en la salida de potencia (ROUT).
feed_constant Relación entre las revoluciones en la salida de potencia (ROUT) y el movimiento
en position_units (p. ej., 1 revolución = 360 grados)
Tab. 5.4 Parámetro de factor de posición
El cálculo del position_factor se realiza con la siguiente fórmula:
position_factor � numeratordivisor
�factordereducción� *� incrementos�revolución
constantedeavance
El position_factor debe escribirse en el controlador de motor separado por contadores y denomina
dores. Por ello puede ser necesario convertir la fracción a números enteros como sea conveniente.
El position_factor no debe superar el valor 224.
EJEMPLOPrimero debe determinarse la unidad deseada (columna 1) y el número de posiciones decimales (PD)
deseado, así como la relación de transmisión y, dado el caso, la constante de avance de la aplicación.
La constante de avance se visualiza en las unidades de posición deseadas (columna 2). Finalmente se
pueden introducir todos los valores en la fórmula y calcular la fracción:

5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 85
Cálculo de factor de posiciónUnidades de
posición
Constante de
avance
Factor de
reducción
Fórmula Resultado
abreviado
Grados,
1 PD
� 1/10 grado
(°/10)
1�ROUT� �
3600� °10
1/1 11
* 65536�Inc
3600� °10
�65536�Inc3600� °
10
num : 4096div : 225
Fig. 5.4 Cálculo de factor de posición
Ejemplos de cálculo del factor de posiciónUnidades de
posición1)constante de
avance2)Factor de
reducción3)Fórmula4) Resultado
abreviado
Incrementos,
0 PD
� Inc.
1�ROUT� �
65536�Ink
1/1 11
* 65536�Inc
65536�Inc � 1�Inc
1�Incnum : 1div : 1
Grados,
1 PD
� 1/10 grado
(°/10)
1�ROUT� �
3600� °10
1/1 11
* 65536�Inc
3600� °10
�65536�Inc3600� °
10
num : 4096div : 225
Rev.,
2 PD
� 1/100 rev.
(R/100)
1�ROUT� �
100� R100
1/1 11
* 65536�Inc
100� 1100
�65536�Inc
100� 1100
num : 16384div : 25
2/3 23
* 65536�Inc
100� 1100
�131072�Inc
300� 1100
num : 32768div : 75
mm,
1 PD
� 1/10 mm
(mm/10)
1�ROUT� �
631, 5� mm10
4/5 45
* 65536�Inc
631, 5� mm10
�2621440�Inc
31575� mm10
num:�524288div:�6315
1) Unidad deseada en la salida de potencia
2) Unidades de posición por revolución en la salida de potencia (ROUT). Constante de avance del actuador * 10-PD
(número de posiciones decimales)
3) Revoluciones en la entrada de potencia por cada revolución en la salida de potencia (RIN entre ROUT)
4) Introducir valores en la fórmula.
Tab. 5.5 Ejemplos de cálculo del factor de posición

5 Ajustar parámetros
86 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
6094h: velocity_encoder_factorEl objeto velocity_encoder_factor sirve para la conversión de todos los valores de velocidad de la ap
licación de speed_units a la unidad interna revoluciones por 4096 minutos. Está formado por
numeradores y denominadores.
Index 6094h
Name velocity_encoder_factor
Object Code ARRAY
No. of Elements 2
Data Type UINT32
Sub-Index 01h
Description numeratorAccess rw
Mapping PDO yes
Units –
Value Range –
Default Value 1000h
Sub-Index 02h
Description divisorAccess rw
Mapping PDO yes
Units –
Value Range –
Default Value 1
El cálculo del velocity_encoder_factor está compuesto en principio por dos partes: un factor de conver
sión de unidades de longitud internas en position_units y un factor de conversión de unidades de tiem
po internas en unidades de tiempo definidas por el usuario (p. ej., de segundos a minutos). La primera
parte equivale al cálculo del position_factor, para la segunda parte se añade un factor adicional para el
cálculo:
Parámetros Descripción
time_factor_v Relación entre la unidad temporal interna y la unidad temporal definida por el
usuario.
(P. ej., 1 min = 1/4096 4096 min)
gear_ratio Relación de transmisión entre las revoluciones en la entrada de potencia (RIN)
y las revoluciones en la salida de potencia (ROUT).
feed_constant Relación entre las revoluciones en la salida de potencia (ROUT) y el movimiento
en position_units (p. ej., 1 revolución = 360 grados)
Tab. 5.6 Parámetro de factor de velocidad
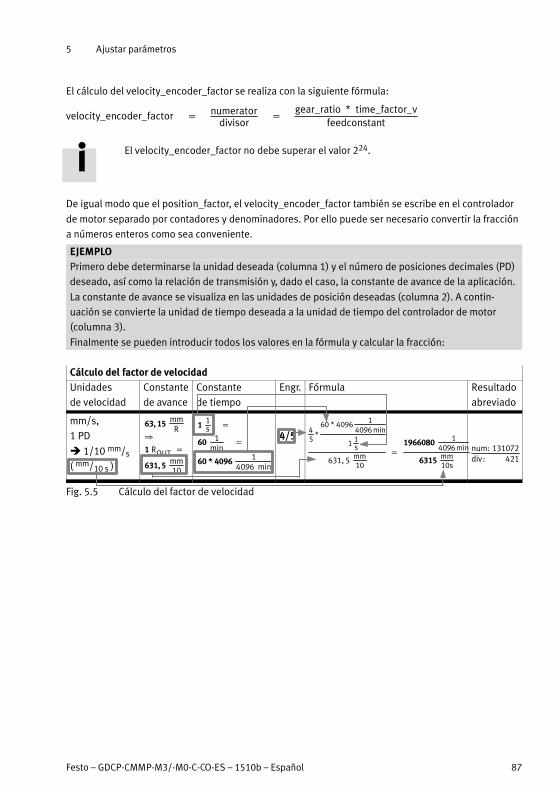
5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 87
El cálculo del velocity_encoder_factor se realiza con la siguiente fórmula:
velocity_encoder_factor � numeratordivisor
�gear_ratio� *� time_factor_v
feedconstant
El velocity_encoder_factor no debe superar el valor 224.
De igual modo que el position_factor, el velocity_encoder_factor también se escribe en el controlador
de motor separado por contadores y denominadores. Por ello puede ser necesario convertir la fracción
a números enteros como sea conveniente.
EJEMPLOPrimero debe determinarse la unidad deseada (columna 1) y el número de posiciones decimales (PD)
deseado, así como la relación de transmisión y, dado el caso, la constante de avance de la aplicación.
La constante de avance se visualiza en las unidades de posición deseadas (columna 2). A contin
uación se convierte la unidad de tiempo deseada a la unidad de tiempo del controlador de motor
(columna 3).
Finalmente se pueden introducir todos los valores en la fórmula y calcular la fracción:
Cálculo del factor de velocidadUnidades
de velocidad
Constante
de avance
Constante
de tiempo
Engr. Fórmula Resultado
abreviado
mm/s,
1 PD
� 1/10 mm/s
( mm/10 s )
63, 15� mmR
� 1�ROUT� �
631, 5� mm10
1� 1s �
60� 1min
�
60 * 4096� 14096� min
4/545
*60�*�4096� 1
4096 min
1�1s
631, 5� mm10
� ��1966080� 1
4096 min
6315� mm10s
num:�131072div:�421
Fig. 5.5 Cálculo del factor de velocidad

5 Ajustar parámetros
88 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Ejemplos de cálculo del factor de velocidadUnidades
de velocidad1)Constante
de avan
ce2)
Constante de
tiempo3)Engr.4)
Fórmula5) Resultado
abreviado
rpm,
0 PD
� rpm
1�ROUT� �
1�ROUT
1� 1min
�
4096� 14096� min
1/111
*4096� 1
4096 min
1� 1min
1� ��
4096� 14096� min
1� 1min
num:�4096div:�1
rpm,
2 PD
� 1/100 rpm
( rev/100 min )
1�ROUT� �
100� R100
1� 1min
�
4096� 14096� min
2/323
*4096� 1
4096 min
1� 1min
100� 1100
1
� ��8192� 1
4096� min
300� 1100� min
num:�2048div:�75
°/s,
1 PD
� 1/10 °/s
( °/10 s )
1�ROUT� �
3600� °10
1� 1s �
60� 1min
�
60 * 4096� 14096� min
1/111
*60�*�4096� 1
4096� min
1�1s
3600� °10
1
� ��245760� 1
4096 min
3600� °10�s
num:�1024div:�15
mm/s,
1 PD
� 1/10 mm/s
( mm/10 s )
63, 15� mmR
� 1�ROUT� �
631, 5� mm10
1� 1s �
60� 1min
�
60 * 4096� 14096� min
4/545
*60�*�4096� 1
4096 min
1�1s
631,5�mm10
1
� ��1966080� 1
4096 min
6315� mm10�s
num:�131072div:�421
1) Unidad deseada en la salida de potencia
2) Unidades de posición por revolución en la salida de potencia (ROUT). Constante de avance del actuador * 10-PD (número de posic
iones decimales)
3) Factor de tiempo_v: unidad de tiempo deseada por cada unidad de tiempo interna
4) Factor de reducción: RIN entre ROUT
5) Introducir valores en la fórmula.
Tab. 5.7 Ejemplos de cálculo del factor de velocidad
6097h: acceleration_factorEl objeto acceleration_factor sirve para la conversión de todos los valores de aceleración de la ap
licación de acceleration_units a la unidad interna revoluciones por minuto por 256 segundos. Está
formado por numeradores y denominadores.
Index 6097h
Name acceleration_factor
Object Code ARRAY
No. of Elements 2
Data Type UINT32
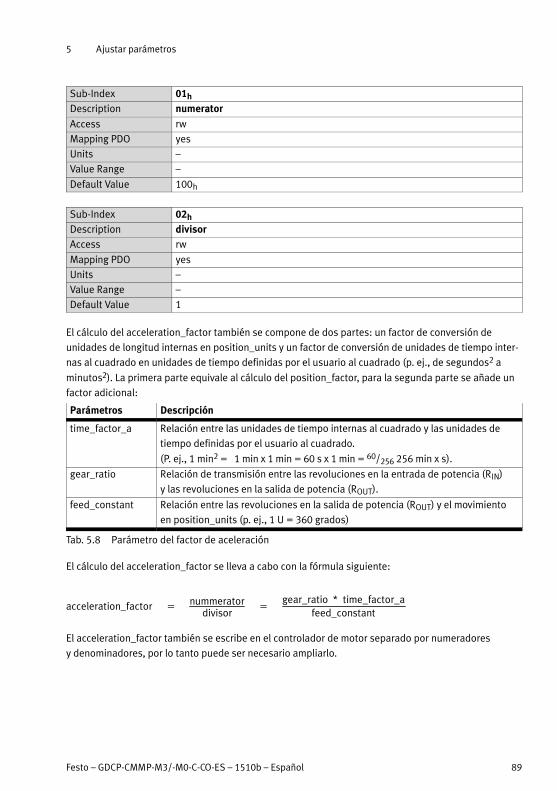
5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 89
Sub-Index 01h
Description numerator
Access rw
Mapping PDO yes
Units –
Value Range –
Default Value 100h
Sub-Index 02h
Description divisorAccess rw
Mapping PDO yes
Units –
Value Range –
Default Value 1
El cálculo del acceleration_factor también se compone de dos partes: un factor de conversión de
unidades de longitud internas en position_units y un factor de conversión de unidades de tiempo inter
nas al cuadrado en unidades de tiempo definidas por el usuario al cuadrado (p. ej., de segundos2 a
minutos2). La primera parte equivale al cálculo del position_factor, para la segunda parte se añade un
factor adicional:
Parámetros Descripción
time_factor_a Relación entre las unidades de tiempo internas al cuadrado y las unidades de
tiempo definidas por el usuario al cuadrado.
(P. ej., 1 min2 = 1 min x 1 min = 60 s x 1 min = 60/256 256 min x s).
gear_ratio Relación de transmisión entre las revoluciones en la entrada de potencia (RIN)
y las revoluciones en la salida de potencia (ROUT).
feed_constant Relación entre las revoluciones en la salida de potencia (ROUT) y el movimiento
en position_units (p. ej., 1 U = 360 grados)
Tab. 5.8 Parámetro del factor de aceleración
El cálculo del acceleration_factor se lleva a cabo con la fórmula siguiente:
acceleration_factor � nummeratordivisor
�gear_ratio� *� time_factor_a
feed_constant
El acceleration_factor también se escribe en el controlador de motor separado por numeradores
y denominadores, por lo tanto puede ser necesario ampliarlo.

5 Ajustar parámetros
90 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
EJEMPLOPrimero debe determinarse la unidad deseada (columna 1) y el número de posiciones decimales (PD)
deseado, así como la relación de transmisión y, dado el caso, la constante de avance de la aplicación.
La constante de avance se visualiza en las unidades de posición deseadas (columna 2). A contin
uación se convierte la unidad de tiempo deseada a la unidad de tiempo del controlador de motor
(columna 3). Finalmente se pueden introducir todos los valores en la fórmula y calcular la fracción:
Desarrollo del cálculo del factor de aceleraciónUnidades de
aceleración
Constante
de avance
Constante
de tiempo
Engr. Fórmula Resultado
abreviado
mm/s²,
1 PD
� 1/10 mm/s²
( mm/10 s² )
63, 15� mmR
� 1�ROUT� �
631, 5� mm10
1� 1
s2 �
60� 1min * s
�
60 * 256�
1min
256� *� s
4/545
*60�*�256� 1
256� min *�s
1� 1
s2
631, 5� mm10
� ��122880�
1min
��256�s�
6315� mm
10s2
num:�8192div:�421
Ejemplos de cálculo del factor de aceleraciónUnidades de
aceleración1)Constante
de
avance2)
Constante
de tiempo3)Engr.4)
Fórmula5) Resultado
abreviado
rpm/s,
0 PD
� rpm/s
1�ROUT� �
1�ROUT
1� 1min * s
�
256�
1min
256� *� s
1/111
*256� 1
256� min� s
1� 1min *�s11
� ��256�
1min
256*�s
1�
1min
s
num:�256div:�1
°/s²,
1 PD
� 1/10 °/s²
( °/10 s² )
1�ROUT� �
3600� °10
1� 1
s2 �
60� 1min * s
�
60 * 256�
1min
256� *� s
1/1 11
*60�*�256� 1
256� min *�s
1� 1
s2
3600� °10
1
� ��15360�
1min
��256�*�s�
3600� °10�s2
num:�64div:�15
rpm²,
2 PD
� 1/100
rpm²
( rev/100 min² )
1�ROUT� �
100� R100
1� 1
min2 �
160
�
1min
s �
25660
�
1min
256 * s
2/3 23
*256� 1
256� min *�s
60� 1
min2
100� 1100
1
� ��512�
1min
��256�s�
18000� 1
100 min2
num:�32div:�1125
1) Unidad deseada en la salida de potencia
2) Unidades de posición por revolución en la salida de potencia (ROUT). Constante de avance del actuador * 10-PD (número de posic
iones decimales)
3) Factor de tiempo_v: unidad de tiempo deseada por cada unidad de tiempo interna
4) Factor de reducción: RIN entre ROUT
5) Introducir valores en la fórmula.
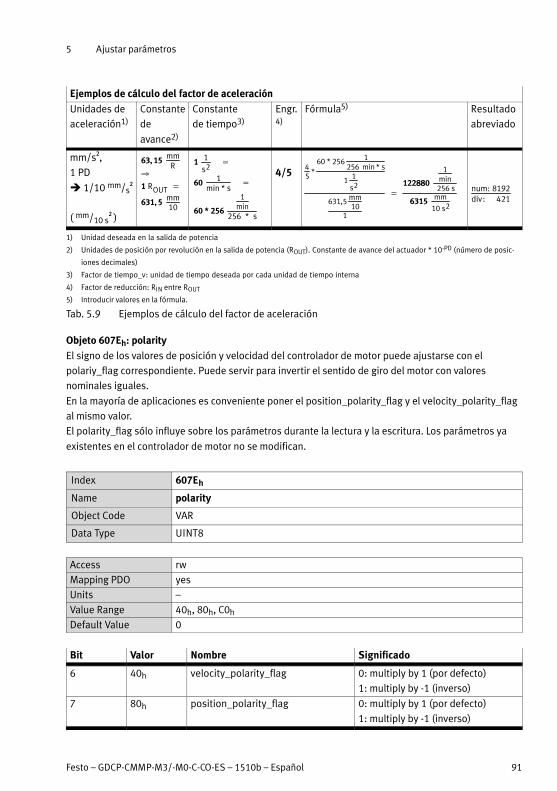
5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 91
Ejemplos de cálculo del factor de aceleración
Unidades de
aceleración1)Resultado
abreviado
Fórmula5)Engr.4)
Constante
de tiempo3)Constante
de
avance2)
mm/s²,
1 PD
� 1/10 mm/s²
( mm/10 s² )
63, 15� mmR
� 1�ROUT� �
631, 5� mm10
1� 1
s2 �
60� 1min * s
�
60 * 256�
1min
256� *� s
4/545
*60�*�256� 1
256� min *�s
1� 1
s2
631,5�mm10
1
� ��122880�
1min
��256�s�
6315� mm
10�s2
num:�8192div:�421
1) Unidad deseada en la salida de potencia
2) Unidades de posición por revolución en la salida de potencia (ROUT). Constante de avance del actuador * 10-PD (número de posic
iones decimales)
3) Factor de tiempo_v: unidad de tiempo deseada por cada unidad de tiempo interna
4) Factor de reducción: RIN entre ROUT
5) Introducir valores en la fórmula.
Tab. 5.9 Ejemplos de cálculo del factor de aceleración
Objeto 607Eh: polarity
El signo de los valores de posición y velocidad del controlador de motor puede ajustarse con el
polariy_flag correspondiente. Puede servir para invertir el sentido de giro del motor con valores
nominales iguales.
En la mayoría de aplicaciones es conveniente poner el position_polarity_flag y el velocity_polarity_flag
al mismo valor.
El polarity_flag sólo influye sobre los parámetros durante la lectura y la escritura. Los parámetros ya
existentes en el controlador de motor no se modifican.
Index 607Eh
Name polarity
Object Code VAR
Data Type UINT8
Access rw
Mapping PDO yes
Units –
Value Range 40h, 80h, C0h
Default Value 0
Bit Valor Nombre Significado
6 40h velocity_polarity_flag 0: multiply by 1 (por defecto)
1: multiply by -1 (inverso)
7 80h position_polarity_flag 0: multiply by 1 (por defecto)
1: multiply by -1 (inverso)

5 Ajustar parámetros
92 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
5.4 Parámetros de paso de salida
Cuadro general
La tensión de red se alimenta a través de una conmutación de precarga en el paso de salida. Al conectar la alimentación de potencia se limita la intensidad de corriente de conexión y se controla la carga.Una vez realizada correctamente la precarga del circuito intermedio, el circuito de carga queda puenteado. Este estado es condición imprescindible para conceder la habilitación del regulador. La tensión dered rectificada se filtra con los condensadores del circuito intermedio. Desde el circuito intermedio sealimenta el motor a través de los IGBTs. El paso de salida contiene una serie de funciones de seguridadque se pueden parametrizar parcialmente:– Lógica de habilitación del regulador (habilitación de software y hardware)
– Supervisión de sobrecorriente
– Supervisión de sobretensión/subtensión del circuito intermedio
– Supervisión parcial de potencia
Descripción de los objetos
Index Objeto Nombre Tipo Attr.
6510h RECORD Drive_data
Objeto 6510h_10h: enable_logicPara que el paso de salida del controlador del motor se pueda activar, las entradas digitales de habilitación del paso de salida y de habilitación del regulador deben estar activadas: la habilitación depaso de salida actúa directamente sobre las señales de excitación de los transistores de potencia ytambién las podría interrumpir en caso de avería de un microprocesador. Por lo tanto si se retira lahabilitación de paso de salida con el motor en marcha, el motor se detiene lentamente sin freno o sedetiene sólo mediante el freno de retención si existe uno. La habilitación del regulador es procesadapor el microcontrolador del controlador de motor. La reacción del controlador de motor después deretirar dicha señal es diferente según el modo de funcionamiento:– Modo de posicionamiento y funcionamiento regulado por la velocidad
Tras retirar la señal, el motor es frenado con una rampa de frenado definida. El paso de salida se
desconecta únicamente cuando la velocidad del motor se encuentra por debajo de 10 rpm y si el
freno de retención, si lo hay, está accionado.
– Funcionamiento regulado por el par
El paso de salida se desconecta inmediatamente después de retirar la señal. Al mismo tiempo se
acciona un freno de retención eventualmente existente. El motor se detiene lentamente sin freno
o es detenido únicamente por el freno de retención, si lo hay.
Advertencia¡Peligro de muerte por tensión!
Las dos señales no garantizan que el motor esté sin tensión.
Al hacer funcionar el motor a través del bus CAN las dos entradas digitales de habilitación del paso de
salida y habilitación del regulador se pueden poner en común a 24 V y la habilitación se puede con
trolar a través del bus CAN. Para ello, el objeto 6510h_10h (enable_logic) se debe poner a dos. Por
motivos de seguridad esto tiene lugar automáticamente al activar CANopen (también después de un
reset del controlador de motor).

5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 93
Index 6510h
Name drive_data
Object Code RECORD
No. of Elements 51
Sub-Index 10h
Description enable_logicData Type UINT16
Access rw
Mapping PDO no
Units –
Value Range 0 … 2
Default Value 0
Valor Significado
0 Entradas digitales habilitación de paso de salida + habilitación de regulador
1 Entradas digitales de habilitación del paso de salida + habilitación del regulador +
interfaz de parámetros
2 Entradas digitales habilitación de paso de salida + habilitación de regulador + CAN
Objeto 6510h_30h: pwm_frequencyLas pérdidas por conmutación del paso de salida son proporcionales a la frecuencia de conmutación de
los transistores de potencia. En los equipos de la familia CMMP se puede obtener un poco más de
potencia reduciendo a la mitad la frecuencia PWM normal. De esta manera aumenta la ondulación de
corriente originada por el paso de salida. La conmutación sólo es posible cuando el paso de salida está
desactivado.
Sub-Index 30h
Description pwm_frequency
Data Type UINT16
Access rw
Mapping PDO no
Units –
Value Range 0, 1
Default Value 0
Valor Significado
0 Frecuencia normal de paso de salida
1 Frecuencia del paso de salida reducida a la mitad
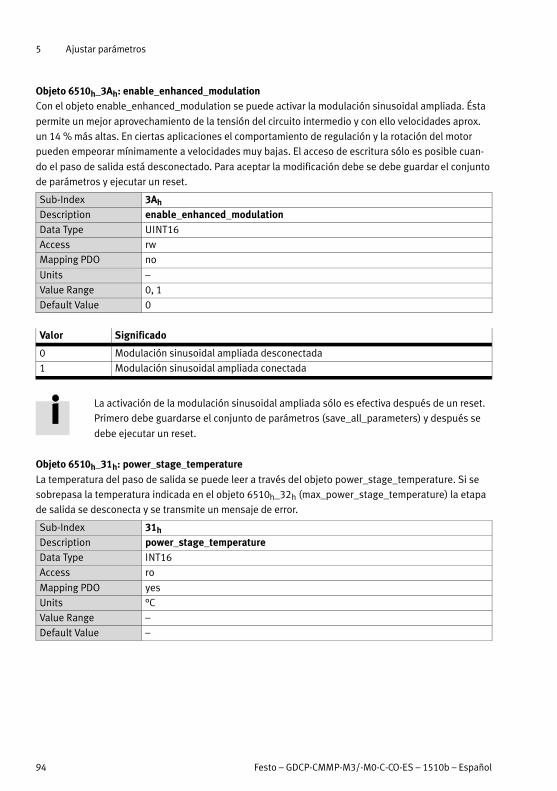
5 Ajustar parámetros
94 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Objeto 6510h_3Ah: enable_enhanced_modulationCon el objeto enable_enhanced_modulation se puede activar la modulación sinusoidal ampliada. Ésta
permite un mejor aprovechamiento de la tensión del circuito intermedio y con ello velocidades aprox.
un 14 % más altas. En ciertas aplicaciones el comportamiento de regulación y la rotación del motor
pueden empeorar mínimamente a velocidades muy bajas. El acceso de escritura sólo es posible cuan
do el paso de salida está desconectado. Para aceptar la modificación debe se debe guardar el conjunto
de parámetros y ejecutar un reset.
Sub-Index 3Ah
Description enable_enhanced_modulationData Type UINT16
Access rw
Mapping PDO no
Units –
Value Range 0, 1
Default Value 0
Valor Significado
0 Modulación sinusoidal ampliada desconectada
1 Modulación sinusoidal ampliada conectada
La activación de la modulación sinusoidal ampliada sólo es efectiva después de un reset.
Primero debe guardarse el conjunto de parámetros (save_all_parameters) y después se
debe ejecutar un reset.
Objeto 6510h_31h: power_stage_temperature
La temperatura del paso de salida se puede leer a través del objeto power_stage_temperature. Si se
sobrepasa la temperatura indicada en el objeto 6510h_32h (max_power_stage_temperature) la etapa
de salida se desconecta y se transmite un mensaje de error.
Sub-Index 31h
Description power_stage_temperatureData Type INT16
Access ro
Mapping PDO yes
Units °C
Value Range –
Default Value –
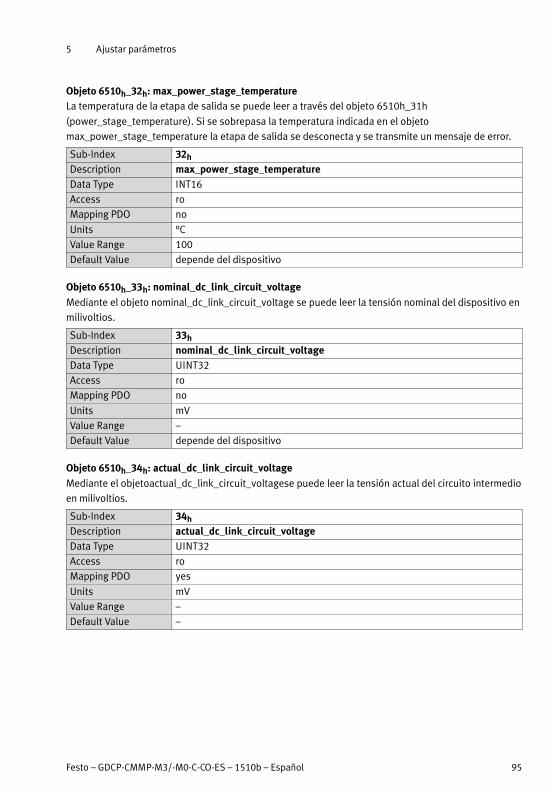
5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 95
Objeto 6510h_32h: max_power_stage_temperatureLa temperatura de la etapa de salida se puede leer a través del objeto 6510h_31h
(power_stage_temperature). Si se sobrepasa la temperatura indicada en el objeto
max_power_stage_temperature la etapa de salida se desconecta y se transmite un mensaje de error.
Sub-Index 32h
Description max_power_stage_temperatureData Type INT16
Access ro
Mapping PDO no
Units °C
Value Range 100
Default Value depende del dispositivo
Objeto 6510h_33h: nominal_dc_link_circuit_voltage
Mediante el objeto nominal_dc_link_circuit_voltage se puede leer la tensión nominal del dispositivo en
milivoltios.
Sub-Index 33h
Description nominal_dc_link_circuit_voltageData Type UINT32
Access ro
Mapping PDO no
Units mV
Value Range –
Default Value depende del dispositivo
Objeto 6510h_34h: actual_dc_link_circuit_voltage
Mediante el objetoactual_dc_link_circuit_voltagese puede leer la tensión actual del circuito intermedio
en milivoltios.
Sub-Index 34h
Description actual_dc_link_circuit_voltageData Type UINT32
Access ro
Mapping PDO yes
Units mV
Value Range –
Default Value –
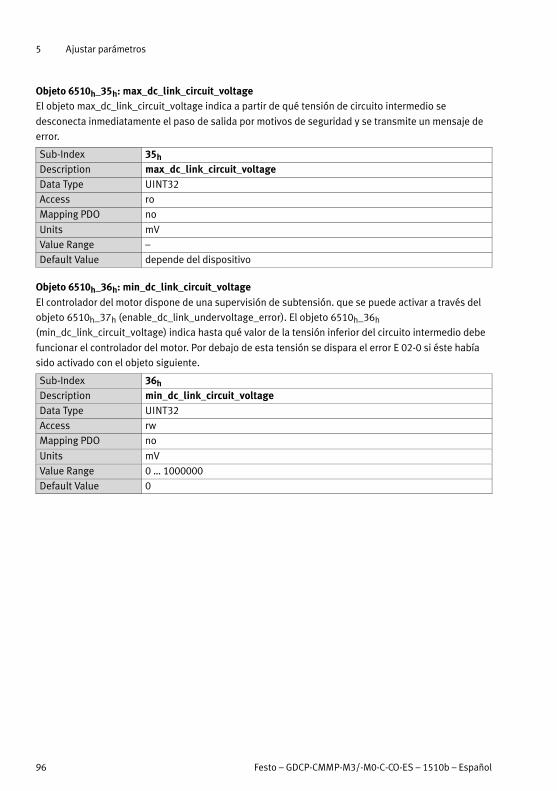
5 Ajustar parámetros
96 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Objeto 6510h_35h: max_dc_link_circuit_voltageEl objeto max_dc_link_circuit_voltage indica a partir de qué tensión de circuito intermedio se
desconecta inmediatamente el paso de salida por motivos de seguridad y se transmite un mensaje de
error.
Sub-Index 35h
Description max_dc_link_circuit_voltageData Type UINT32
Access ro
Mapping PDO no
Units mV
Value Range –
Default Value depende del dispositivo
Objeto 6510h_36h: min_dc_link_circuit_voltage
El controlador del motor dispone de una supervisión de subtensión. que se puede activar a través del
objeto 6510h_37h (enable_dc_link_undervoltage_error). El objeto 6510h_36h
(min_dc_link_circuit_voltage) indica hasta qué valor de la tensión inferior del circuito intermedio debe
funcionar el controlador del motor. Por debajo de esta tensión se dispara el error E 02-0 si éste había
sido activado con el objeto siguiente.
Sub-Index 36h
Description min_dc_link_circuit_voltageData Type UINT32
Access rw
Mapping PDO no
Units mV
Value Range 0 … 1000000
Default Value 0
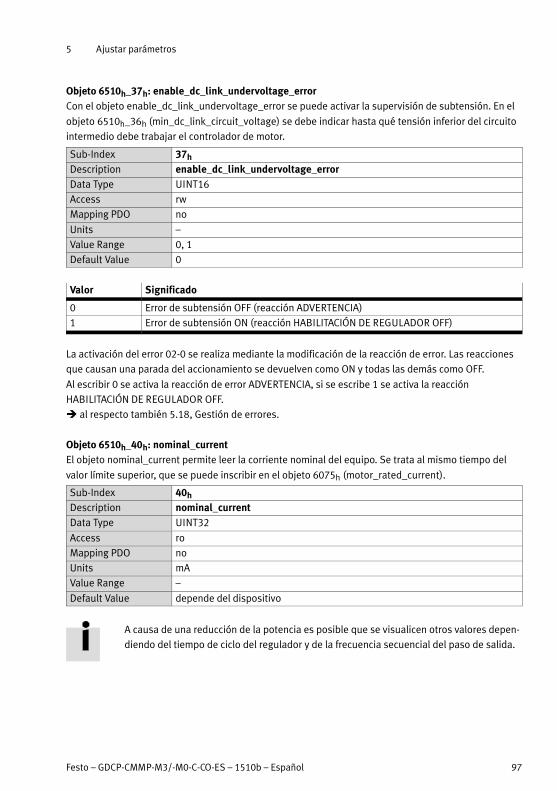
5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 97
Objeto 6510h_37h: enable_dc_link_undervoltage_errorCon el objeto enable_dc_link_undervoltage_error se puede activar la supervisión de subtensión. En el
objeto 6510h_36h (min_dc_link_circuit_voltage) se debe indicar hasta qué tensión inferior del circuito
intermedio debe trabajar el controlador de motor.
Sub-Index 37h
Description enable_dc_link_undervoltage_errorData Type UINT16
Access rw
Mapping PDO no
Units –
Value Range 0, 1
Default Value 0
Valor Significado
0 Error de subtensión OFF (reacción ADVERTENCIA)
1 Error de subtensión ON (reacción HABILITACIÓN DE REGULADOR OFF)
La activación del error 02-0 se realiza mediante la modificación de la reacción de error. Las reacciones
que causan una parada del accionamiento se devuelven como ON y todas las demás como OFF.
Al escribir 0 se activa la reacción de error ADVERTENCIA, si se escribe 1 se activa la reacción
HABILITACIÓN DE REGULADOR OFF.
� al respecto también 5.18, Gestión de errores.
Objeto 6510h_40h: nominal_currentEl objeto nominal_current permite leer la corriente nominal del equipo. Se trata al mismo tiempo del
valor límite superior, que se puede inscribir en el objeto 6075h (motor_rated_current).
Sub-Index 40h
Description nominal_currentData Type UINT32
Access ro
Mapping PDO no
Units mA
Value Range –
Default Value depende del dispositivo
A causa de una reducción de la potencia es posible que se visualicen otros valores depen
diendo del tiempo de ciclo del regulador y de la frecuencia secuencial del paso de salida.

5 Ajustar parámetros
98 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Objeto 6510h_41h: peak_currentEl objeto peak_current permite leer la corriente de pico del equipo. Se trata al mismo tiempo del valor
límite superior, que se puede inscribir en el objeto 6073h (max_current).
Sub-Index 41h
Description peak_current
Data Type UINT32
Access ro
Mapping PDO no
Units mA
Value Range –
Default Value depende del dispositivo
Los valores son válidos para un tiempo de ciclo del regulador de corriente de 125 μs.
A causa de una reducción de la potencia es posible que se visualicen otros valores depen
diendo del tiempo de ciclo del regulador y de la frecuencia secuencial del paso de salida.
5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 99
5.5 Regulador de corriente y adaptación de motor
AtenciónLos ajustes incorrectos de los parámetros del regulador de corriente y de las
limitaciones de corriente pueden dañar el motor y, en determinadas circunstancias,
también el controlador de motor en poco tiempo.
Cuadro general
El conjunto de parámetros del controlador de motor debe adaptarse para el motor conectado y el juego
de cables utilizado. Esto concierne a los siguientes parámetros:
Parámetros Dependencias
Corriente nominal Depende del motor
Capacidad de
sobrecarga
Depende del motor
Número de polos Depende del motor
Regulador de
corriente
Depende del motor
Sentido de giro Depende del motor y de la secuencia de fases en el cable del motor y en el cable
del transmisor de ángulo
Ángulo offset Depende del motor y de la secuencia de fases en el cable del motor y en el cable
del transmisor de ángulo
Se debe tener en cuenta que el sentido de giro y el ángulo de offset también dependen del juego de
cables utilizado. Por eso los conjuntos de parámetros sólo funcionan cuando el cableado es idéntico.
AtenciónSi la secuencia de fases del cable del motor o del transductor angular es incorrecta,
puede originarse una realimentación que impida regular la velocidad en el motor.
¡El motor puede girar de manera descontrolada!

5 Ajustar parámetros
100 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Descripción de los objetos
Index Objeto Nombre Tipo Attr.
6075h VAR motor_rated_current UINT32 rw
6073h VAR max_current UINT16 rw
604Dh VAR pole_number UINT8 rw
6410h RECORD motor_data rw
60F6h RECORD torque_control_parameters rw
Objetos relacionados de otros capítulos
Index Objeto Nombre Tipo Capítulo
2415h RECORD current_limitation 5.8 Limitación de valor nominal
Objeto 6075h: motor_rated_current
Este valor está indicado en la placa del tipo del motor en miliamperios. Siempre se presupone el valor
efectivo (RMS). Puede ocurrir que se predeterminen corrientes que se encuentren por encima de la
corriente nominal del controlador del motor (6510h_40h: nominal_current).
Index 6075h
Name motor_rated_current
Object Code VAR
Data Type UINT32
Access rw
Mapping PDO yes
Units mA
Value Range 0 … nominal_current
Default Value 296
Siempre que se escriba un nuevo valor en el objeto 6075h (motor_rated_current) también
deberá parametrizarse de nuevo el objeto 6073h (max_current).
Objeto 6073h: max_current
En general los servomotores pueden sobrecargarse durante un período de tiempo determinado. Con
este objeto se ajusta como factor la corriente de motor máxima permitida. Se refiere a la corriente
nominal del motor (objeto 6075h: motor_rated_current) y se ajusta en milésimas. El límite superior del
margen de valores está determinado por la corriente máxima del controlador (objeto 6510h_41h:
peak_current) . Muchos motores pueden sobrecargarse temporalmente con el factor 4. En ese caso
debe inscribirse el valor 4000 en este objeto.
El objeto 6073h (max_current) sólo puede escribirse si anteriormente se ha escrito de
forma válida el objeto 6075h (motor_rated_current).
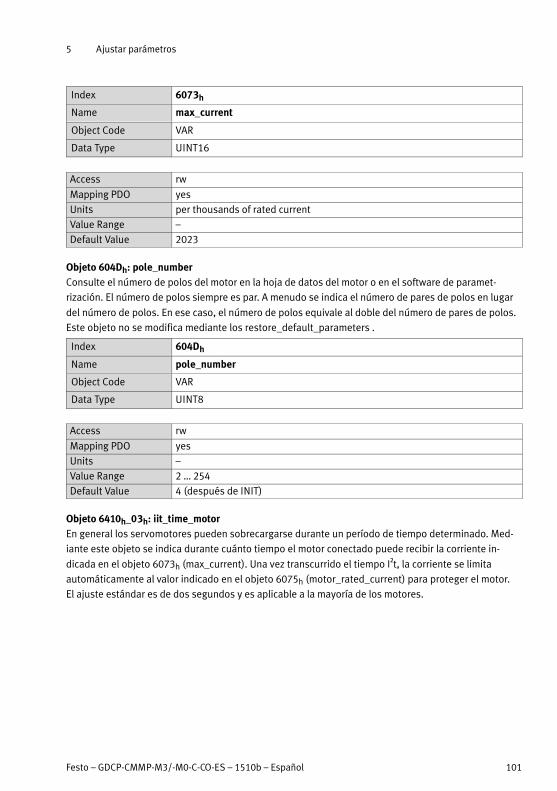
5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 101
Index 6073h
Name max_current
Object Code VAR
Data Type UINT16
Access rw
Mapping PDO yes
Units per thousands of rated current
Value Range –
Default Value 2023
Objeto 604Dh: pole_numberConsulte el número de polos del motor en la hoja de datos del motor o en el software de paramet
rización. El número de polos siempre es par. A menudo se indica el número de pares de polos en lugar
del número de polos. En ese caso, el número de polos equivale al doble del número de pares de polos.
Este objeto no se modifica mediante los restore_default_parameters .
Index 604Dh
Name pole_number
Object Code VAR
Data Type UINT8
Access rw
Mapping PDO yes
Units –
Value Range 2 … 254
Default Value 4 (después de INIT)
Objeto 6410h_03h: iit_time_motorEn general los servomotores pueden sobrecargarse durante un período de tiempo determinado. Med
iante este objeto se indica durante cuánto tiempo el motor conectado puede recibir la corriente in
dicada en el objeto 6073h (max_current). Una vez transcurrido el tiempo I²t, la corriente se limita
automáticamente al valor indicado en el objeto 6075h (motor_rated_current) para proteger el motor.
El ajuste estándar es de dos segundos y es aplicable a la mayoría de los motores.
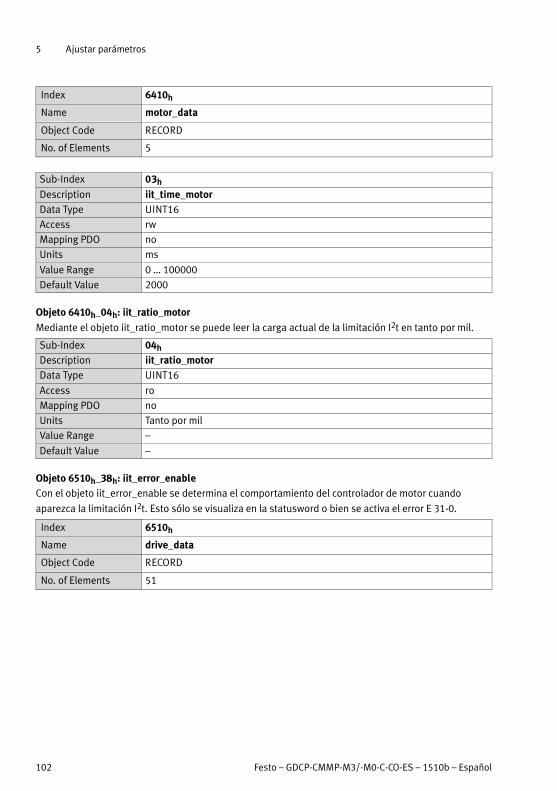
5 Ajustar parámetros
102 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Index 6410h
Name motor_data
Object Code RECORD
No. of Elements 5
Sub-Index 03h
Description iit_time_motorData Type UINT16
Access rw
Mapping PDO no
Units ms
Value Range 0 … 100000
Default Value 2000
Objeto 6410h_04h: iit_ratio_motor
Mediante el objeto iit_ratio_motor se puede leer la carga actual de la limitación I2t en tanto por mil.
Sub-Index 04h
Description iit_ratio_motorData Type UINT16
Access ro
Mapping PDO no
Units Tanto por mil
Value Range –
Default Value –
Objeto 6510h_38h: iit_error_enableCon el objeto iit_error_enable se determina el comportamiento del controlador de motor cuando
aparezca la limitación I2t. Esto sólo se visualiza en la statusword o bien se activa el error E 31-0.
Index 6510h
Name drive_data
Object Code RECORD
No. of Elements 51

5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 103
Sub-Index 38h
Description iit_error_enable
Data Type UINT16
Access rw
Mapping PDO no
Units –
Value Range 0, 1
Default Value 0
Valor Significado
0 Error I2t OFF (Prioridad ADVERTENCIA)
1 Error I2t ON (Prioridad HABILITACIÓN DE REGULADOR OFF)
La activación del error E 31-0 se realiza mediante la modificación de la reacción de error. Las reacciones
que causan una parada del accionamiento son retornadas como ON, todas las demás como OFF. Al
escribir 0 se activa la reacción de error ADVERTENCIA, si se escribe 1 se activa la reacción HA
BILITACIÓN DE REGULADOR OFF. � capítulo 5.18, Gestión de errores.
Objeto 6410h_10h: phase_orderEn la secuencia de fases (phase_order) se toman en consideración las torsiones entre el cable de motor
y el cable del transductor angular. Se puede consultar en el software de parametrización.
Sub-Index 10h
Description phase_order
Data Type INT16
Access rw
Mapping PDO yes
Units –
Value Range 0, 1
Default Value 0
Valor Significado
0 Derecha
1 Izquierda
Objeto 6410h_11h: encoder_offset_angleLos servomotores utilizados tienen imanes permanentes en el rotor. Éstos generan un campo mag
nético cuya orientación respecto al estator depende de la posición del rotor. Para la conmutación eléc
trica el controlador de motor debe ajustar el campo electromagnético del estator siempre con el ángulo
correcto respecto al campo magnético permanente. Para ello determina continuamente la posición del
rotor con un transductor angular (resolver etc.).
La orientación del transmisor de ángulo respecto al campo magnético permanente se debe introducir
en el objeto encoder_offset_angle. Con el software de parametrización se puede determinar el ángulo.

5 Ajustar parámetros
104 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
El ángulo determinado con el software de parametrización se encuentra en el rango de ±180°.
Debe convertirse de la siguiente manera:
encoder_offset_angle � Offsetdeltransmisordeángulo� *� 32767180°
Este objeto no se modifica mediante los restore_default_parameters .
Index 6410h
Name motor_data
Object Code RECORD
No. of Elements 5
Sub-Index 11h
Description encoder_offset_angleData Type INT16
Access rw
Mapping PDO yes
Units …
Value Range -32767 … 32767
Default Value E000h (-45°) (según el ajuste de fábrica)
Objeto 6410h_14h: motor_temperature_sensor_polarityEste objeto permite determinar si a modo de sensor digital de temperatura del motor se debe utilizar
un contacto normalmente cerrado o un contacto normalmente abierto.
Sub-Index 14h
Description motor_temperatur_sensor_polarityData Type INT16
Access rw
Mapping PDO yes
Units –
Value Range 0, 1
Default Value 0
Valor Significado
0 Contacto normalmente cerrado
1 Contacto normalmente abierto

5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 105
Objeto 6510h_2Eh: motor_temperatureCon este objeto se puede leer la temperatura actual del motor, siempre que esté conectado un sensor
de temperatura analógico. En otro caso el objeto no está definido.
Index 6510h
Name drive_data
Object Code RECORD
No. of Elements 51
Sub-Index 2Eh
Description motor_temperatureData Type INT16
Access ro
Mapping PDO yes
Units °C
Value Range –
Default Value –
Objeto 6510h_2Fh: max_motor_temperature
Si se sobrepasa la temperatura del motor definida en este objeto, tiene lugar una reacción según la
gestión de errores (error 03-0, sobretemperatura motor analógico). Si se ha parametrizado una reac
ción que origina una parada del accionamiento, se emite un Emergency Message.
Acerca de la parametrización de la gestión de errores � cap. 5.18, Gestión de errores.
Sub-Index 2Fh
Description max_motor_temperatureData Type INT16
Access rw
Mapping PDO no
Units °C
Value Range 20 … 300
Default Value 100
Objeto 60F6h: torque_control_parametersLos datos del regulador de corriente deben obtenerse en el software de parametrización. Se deben
tener en cuenta las conversiones siguientes:
La amplificación del regulador de corriente debe multiplicarse por 256. Con una amplificación de 1,5 en
el menú “Regulador de corriente” del software de parametrización, en el objeto torque_control_gain se
debe introducir el valor 384 = 180h.
La constante de tiempo del regulador de corriente está indicada en el software de parametrización en
milisegundos. Para poder introducir dicha constante de tiempo en el objeto torque_control_time
primero debe convertirse a microsegundos. Con una indicación de tiempo de 0,6 milisegundos debe
introducirse correspondientemente el valor 600 en el objeto torque_control_time.
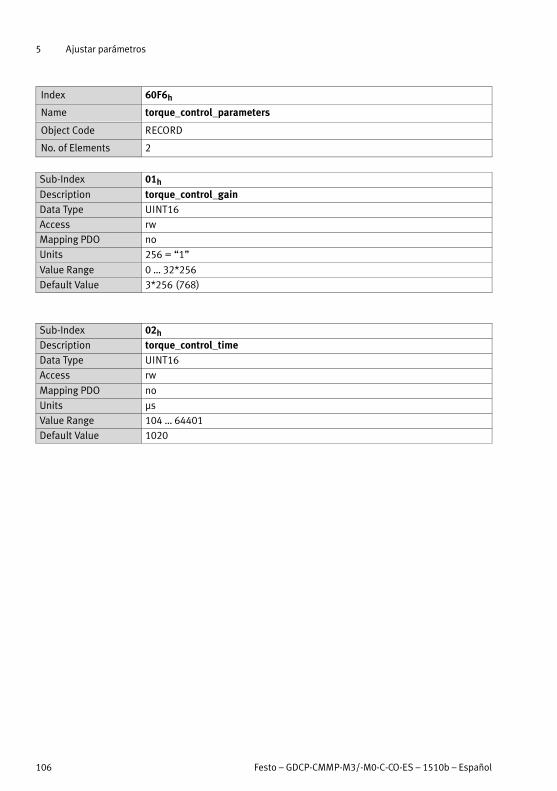
5 Ajustar parámetros
106 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Index 60F6h
Name torque_control_parameters
Object Code RECORD
No. of Elements 2
Sub-Index 01h
Description torque_control_gainData Type UINT16
Access rw
Mapping PDO no
Units 256 = “1”
Value Range 0 … 32*256
Default Value 3*256 (768)
Sub-Index 02h
Description torque_control_timeData Type UINT16
Access rw
Mapping PDO no
Units μs
Value Range 104 … 64401
Default Value 1020
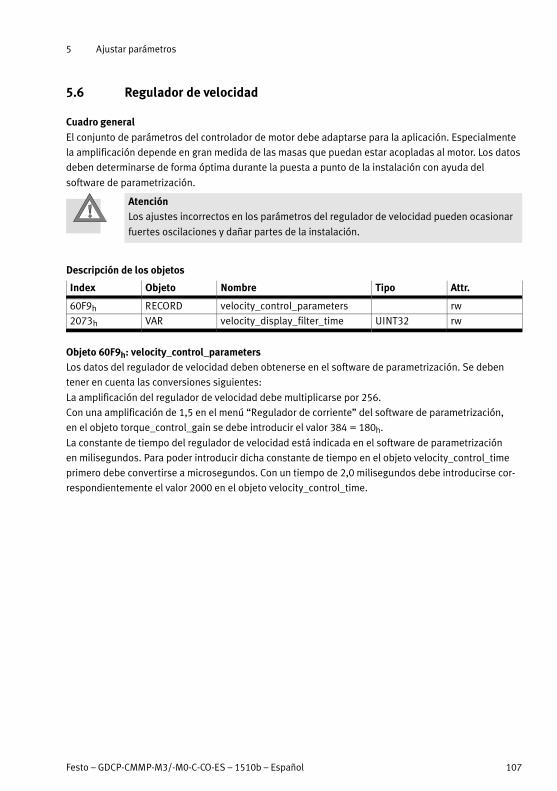
5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 107
5.6 Regulador de velocidad
Cuadro general
El conjunto de parámetros del controlador de motor debe adaptarse para la aplicación. Especialmente
la amplificación depende en gran medida de las masas que puedan estar acopladas al motor. Los datos
deben determinarse de forma óptima durante la puesta a punto de la instalación con ayuda del
software de parametrización.
AtenciónLos ajustes incorrectos en los parámetros del regulador de velocidad pueden ocasionar
fuertes oscilaciones y dañar partes de la instalación.
Descripción de los objetos
Index Objeto Nombre Tipo Attr.
60F9h RECORD velocity_control_parameters rw
2073h VAR velocity_display_filter_time UINT32 rw
Objeto 60F9h: velocity_control_parametersLos datos del regulador de velocidad deben obtenerse en el software de parametrización. Se deben
tener en cuenta las conversiones siguientes:
La amplificación del regulador de velocidad debe multiplicarse por 256.
Con una amplificación de 1,5 en el menú “Regulador de corriente” del software de parametrización,
en el objeto torque_control_gain se debe introducir el valor 384 = 180h.
La constante de tiempo del regulador de velocidad está indicada en el software de parametrización
en milisegundos. Para poder introducir dicha constante de tiempo en el objeto velocity_control_time
primero debe convertirse a microsegundos. Con un tiempo de 2,0 milisegundos debe introducirse cor
respondientemente el valor 2000 en el objeto velocity_control_time.

5 Ajustar parámetros
108 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Index 60F9h
Name velocity_control_parameter_set
Object Code RECORD
No. of Elements 3
Sub-Index 01h
Description velocity_control_gainData Type UINT16
Access rw
Mapping PDO no
Units 256 = Gain 1
Value Range 20 … 64*256 (16384)
Default Value 256
Sub-Index 02h
Description velocity_control_timeData Type UINT16
Access rw
Mapping PDO no
Units μs
Value Range 1 … 32000
Default Value 2000
Sub-Index 04h
Description velocity_control_filter_timeData Type UINT16
Access rw
Mapping PDO no
Units μs
Value Range 1 … 32000
Default Value 400

5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 109
Objeto 2073h: velocity_display_filter_timeCon el objeto velocity_display_filter_time se puede establecer el tiempo de filtro del filtro de valor real
de la visualización de velocidad.
Index 2073h
Name velocity_display_filter_time
Object Code VAR
Data Type UINT32
Access rw
Mapping PDO no
Units μs
Value Range 1000 … 50000
Default Value 20000
Tenga en cuenta que el objeto velocity_actual_value_filtered se utiliza para la protección
antigiro. Si el tiempo de filtro es muy elevado, un error de giro se reconoce con el retardo
correspondiente.
5.7 Controlador de posición (Position Control Function)
Cuadro generalEn este capítulo se describen todos los parámetros requeridos para el regulador de posición. En la
entrada del regulador de posición está el valor nominal de posición (position_demand_value) del
generador de curvas de desplazamiento. Además se aplica el valor real de posición
(position_actual_value) del transductor angular (resolver, encoder incremental, etc.). Se puede influir
en el comportamiento del regulador de posición a través de los parámetros. Para mantener estable el
circuito de regulación de posición es posible limitar la variable de salida (control_effort). La variable de
salida se añade al regulador de velocidad como valor nominal. Todas las variables de entrada y de
salida del regulador de posición se convierten en el Factor Group de las unidades específicas de la
aplicación a las unidades internas del regulador.
En este capítulo se definen las siguientes subfunciones:
1. Error de seguimiento (Following_Error)
El término error de seguimiento designa la desviación del valor real de posición
(position_actual_value) respecto al valor nominal de posición (position_demand_value). Cuando el
error de seguimiento para un período de tiempo determinado es mayor que el indicado en la
ventana de error de seguimiento (following_error_window), en el objeto statusword se activa el bit
13 following_error. El período de tiempo se puede predeterminar mediante el objeto
following_error_time_out.

5 Ajustar parámetros
110 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Following_error_window (6065h)
Following_error_time_out (6066h)
Statusword, bit 13 (6041h)
0
Following_error_window (6065h)
Fig. 5.6 Error de seguimiento: cuadro general de funcionamiento
2. Posición alcanzada (Position Reached)Esta función ofrece la posibilidad de definir una ventana de posición alrededor de la posición de
destino (target_position). Si la posición real del accionamiento se encuentra en esta zona durante
un tiempo determinado (el position_window_time), entonces el bit 10 relacionado (target_reached)
se activa en el statusword.

5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 111
Position_window (6067h)
Position_window_time (6068h)
Statusword, bit 10 (6041h)
0
Position_window (6067h)
Fig. 5.7 Posición alcanzada: cuadro general de funcionamiento
Descripción de los objetos
Objetos tratados en este capítulo
Index Objeto Nombre Tipo Attr.
202Dh VAR position_demand_sync_value INT32 ro
2030h VAR set_position_absolute INT32 wo
6062h VAR position_demand_value INT32 ro
6063h VAR position_actual_value_s1) INT32 ro
6064h VAR position_actual_value INT32 ro
6065h VAR following_error_window UINT32 rw
6066h VAR following_error_time_out UINT16 rw
6067h VAR position_window UINT32 rw
6068h VAR position_window_time UINT16 rw
607Bh ARRAY position_range_limit INT32 rw
60F4h VAR following_error_actual_value INT32 ro
60FAh VAR control_effort INT32 ro
60FBh RECORD position_control_parameter_set rw
6510h_20h VAR position_range_limit_enable UINT16 rw
6510h_22h VAR position_error_switch_off_limit UINT32 rw
1) En incrementos

5 Ajustar parámetros
112 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Objetos relacionados de otros capítulos
Index Objeto Nombre Tipo Capítulo
607Ah VAR target_position INT32 7.3 Modo de funcionamiento
Posicionamiento607Ch VAR home_offset INT32 7.2 Recorrido de referencia607Dh VAR software_position_limit INT32 7.3 Modo de funcionamiento
Posicionamiento607Eh VAR polarity UINT8 5.3 Factores de conversión6093h VAR position_factor UINT32 5.3 Factores de conversión6094h ARRAY velocity_encoder_factor UINT32 5.3 Factores de conversión6096h ARRAY acceleration_factor UINT32 5.3 Factores de conversión6040h VAR controlword INT16 6.1.3 Controlword
(palabra de control)6041h VAR statusword UINT16 6.1.5 Statuswords
(palabras de estado)
Objeto 60FBh: position_control_parameter_setEl conjunto de parámetros del controlador de motor debe adaptarse para la aplicación. Los datos del
regulador de posición deben determinarse de forma óptima durante la puesta a punto de la instalación
con el software de parametrización.
AtenciónLos ajustes incorrectos en los parámetros del regulador de posición pueden ocasionar
fuertes oscilaciones y dañar partes de la instalación.
El controlador de posición compara la posición nominal con la posición real y a partir de esta diferencia,y teniendo en cuenta la amplificación y el posible integrador, genera una velocidad de corrección (objeto 60FAh: control_effort) que se entrega al regulador del número de revoluciones.El regulador de posición es relativamente lento en comparación con el regulador de corriente y el develocidad. Por eso el regulador funciona internamente con conexiones posteriores de manera que eltrabajo de regulación se minimiza para el regulador de posición y por lo tanto puede responderrápidamente.En general un componente proporcional es suficiente como regulador de posición. La amplificación delregulador de posición debe multiplicarse por 256. Con una amplificación de 1,5 en el menú “Reguladorde posición” del software de parametrización debe introducirse en el objetoposition_control_gain elvalor 384.Normalmente el regulador de posición no requiere integrador. Entonces debe introducirse el valor ceroen el objeto position_control_time. En otro caso la constante de tiempo del regulador de posición debeconvertirse a microsegundos. Con un tiempo de 4,0 milisegundos debe introducirse correspondientemente el valor 4000 en el objeto position_control_time.Dado que el controlador de posición convierte incluso las desviaciones de posición más pequeñas envelocidades de corrección nominales, una avería breve (p. ej., atasco breve de la instalación) podría darlugar a procesos de regulación de gran magnitud con velocidades de corrección muy grandes. Esto sepuede evitar limitando convenientemente la salida del controlador de posición mediante el objetoposition_control_v_max (p. ej., 500 rpm).
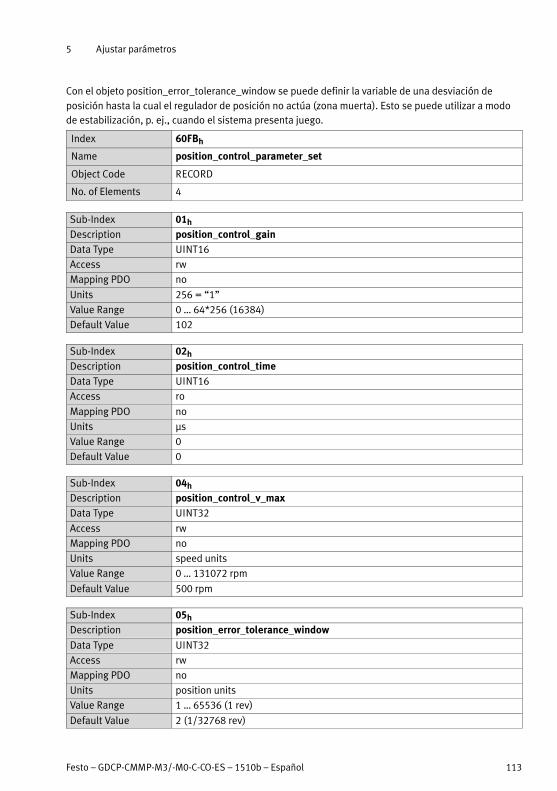
5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 113
Con el objeto position_error_tolerance_window se puede definir la variable de una desviación deposición hasta la cual el regulador de posición no actúa (zona muerta). Esto se puede utilizar a modode estabilización, p. ej., cuando el sistema presenta juego.
Index 60FBh
Name position_control_parameter_set
Object Code RECORD
No. of Elements 4
Sub-Index 01h
Description position_control_gainData Type UINT16
Access rw
Mapping PDO no
Units 256 = “1”
Value Range 0 … 64*256 (16384)
Default Value 102
Sub-Index 02h
Description position_control_timeData Type UINT16
Access ro
Mapping PDO no
Units μs
Value Range 0
Default Value 0
Sub-Index 04h
Description position_control_v_maxData Type UINT32
Access rw
Mapping PDO no
Units speed units
Value Range 0 … 131072 rpm
Default Value 500 rpm
Sub-Index 05h
Description position_error_tolerance_window
Data Type UINT32
Access rw
Mapping PDO no
Units position units
Value Range 1 … 65536 (1 rev)
Default Value 2 (1/32768 rev)
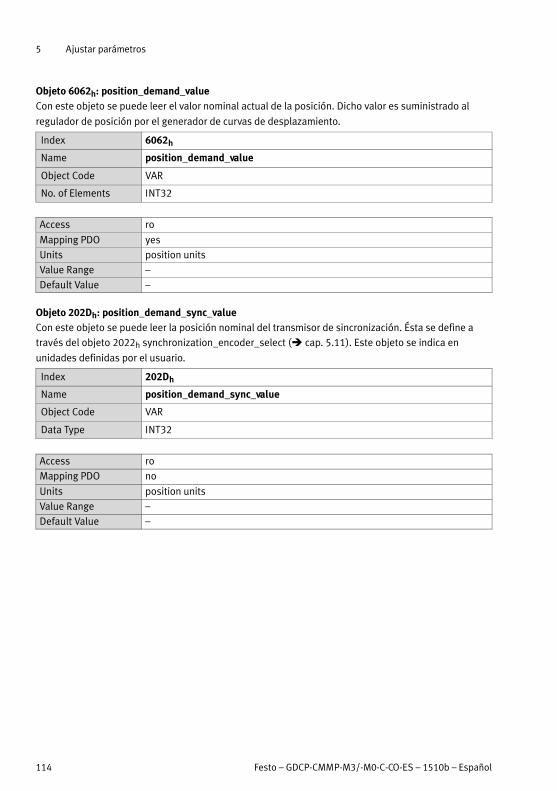
5 Ajustar parámetros
114 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Objeto 6062h: position_demand_valueCon este objeto se puede leer el valor nominal actual de la posición. Dicho valor es suministrado al
regulador de posición por el generador de curvas de desplazamiento.
Index 6062h
Name position_demand_value
Object Code VAR
No. of Elements INT32
Access ro
Mapping PDO yes
Units position units
Value Range –
Default Value –
Objeto 202Dh: position_demand_sync_valueCon este objeto se puede leer la posición nominal del transmisor de sincronización. Ésta se define a
través del objeto 2022h synchronization_encoder_select (� cap. 5.11). Este objeto se indica en
unidades definidas por el usuario.
Index 202Dh
Name position_demand_sync_value
Object Code VAR
Data Type INT32
Access ro
Mapping PDO no
Units position units
Value Range –
Default Value –

5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 115
Objeto 6063h: position_actual_value_s (incrementos)Con este objeto se puede leer la posición real. Dicho valor es suministrado al regulador de posición por
el transductor angular. Este objeto se indica en incrementos.
Index 6063h
Name position_actual_value_s
Object Code VAR
Data Type INT32
Access ro
Mapping PDO yes
Units increments
Value Range –
Default Value –
Objeto 6064h: position_actual_value (unidades definidas por el usuario)Con este objeto se puede leer la posición real. Dicho valor es suministrado al regulador de posición por
el transductor angular. Este objeto se indica en unidades definidas por el usuario.
Index 6064h
Name position_actual_value
Object Code VAR
Data Type INT32
Access ro
Mapping PDO yes
Units position units
Value Range –
Default Value –
Objeto 6065h: following_error_windowEl objeto following_error_window (ventana de error de seguimiento) define una zona simétrica al
rededor del valor nominal de posición (position_demand_value) . Si el valor real de posición (posit
ion_actual_value) se encuentra fuera de la ventana de error de seguimiento (following_error_window),
aparece un error de seguimiento y en el objeto statusword se activa el bit 13. Un error de seguimiento
puede deberse a las siguientes causas:
– el accionamiento está bloqueado
– la velocidad de posicionamiento es demasiado elevada
– los valores de aceleración son demasiado altos
– el objeto following_error_window está ocupado con un valor demasiado bajo
– el regulador de posición no está parametrizado correctamente
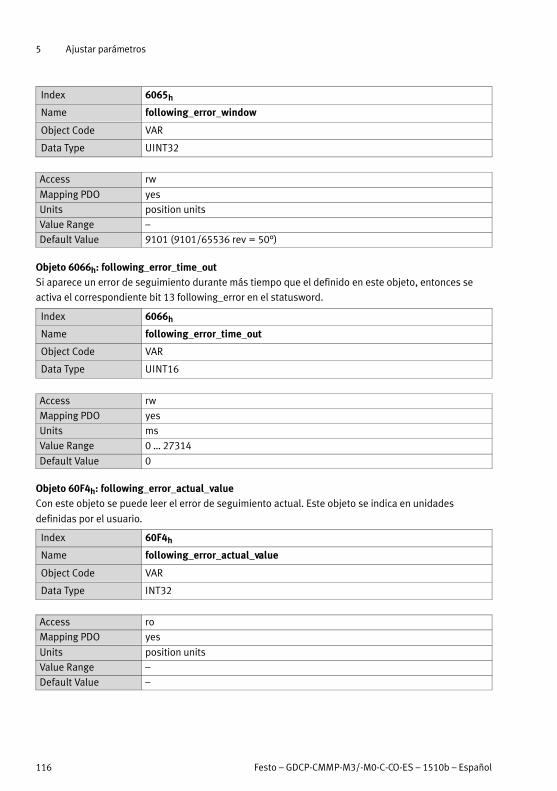
5 Ajustar parámetros
116 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Index 6065h
Name following_error_window
Object Code VAR
Data Type UINT32
Access rw
Mapping PDO yes
Units position units
Value Range –
Default Value 9101 (9101/65536 rev = 50°)
Objeto 6066h: following_error_time_outSi aparece un error de seguimiento durante más tiempo que el definido en este objeto, entonces se
activa el correspondiente bit 13 following_error en el statusword.
Index 6066h
Name following_error_time_out
Object Code VAR
Data Type UINT16
Access rw
Mapping PDO yes
Units ms
Value Range 0 … 27314
Default Value 0
Objeto 60F4h: following_error_actual_valueCon este objeto se puede leer el error de seguimiento actual. Este objeto se indica en unidades
definidas por el usuario.
Index 60F4h
Name following_error_actual_value
Object Code VAR
Data Type INT32
Access ro
Mapping PDO yes
Units position units
Value Range –
Default Value –
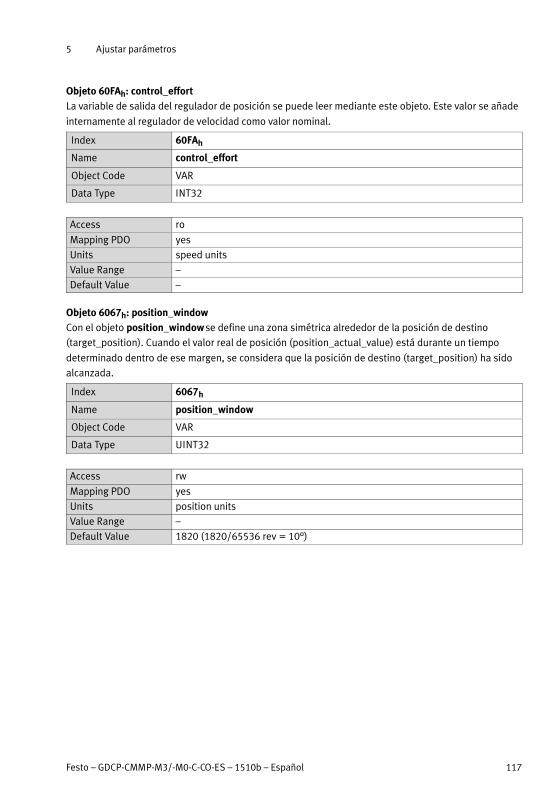
5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 117
Objeto 60FAh: control_effortLa variable de salida del regulador de posición se puede leer mediante este objeto. Este valor se añade
internamente al regulador de velocidad como valor nominal.
Index 60FAh
Name control_effort
Object Code VAR
Data Type INT32
Access ro
Mapping PDO yes
Units speed units
Value Range –
Default Value –
Objeto 6067h: position_windowCon el objeto position_window se define una zona simétrica alrededor de la posición de destino
(target_position). Cuando el valor real de posición (position_actual_value) está durante un tiempo
determinado dentro de ese margen, se considera que la posición de destino (target_position) ha sido
alcanzada.
Index 6067h
Name position_window
Object Code VAR
Data Type UINT32
Access rw
Mapping PDO yes
Units position units
Value Range –
Default Value 1820 (1820/65536 rev = 10°)

5 Ajustar parámetros
118 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Objeto 6068h: position_window_timeSi la posición real del accionamiento se encuentra dentro de la ventana de posición (position_window)
durante el tiempo definido en este objeto, el bit 10 correspondiente target_reached de statusword se
activa.
Index 6068h
Name position_window_time
Object Code VAR
Data Type UINT16
Access rw
Mapping PDO yes
Units ms
Value Range –
Default Value 0
Objeto 6510h_22h: position_error_switch_off_limitEn el objeto position_error_switch_off_limit se puede introducir la desviación máxima permitida entre
la posición nominal y la posición real. En oposición al mensaje de error de seguimiento mencionado, en
caso de rebasamiento el paso de salida se desconecta de inmediato y se emite un error. El motor se
detiene lentamente sin freno (excepto si existe un freno de retención).
Index 6510h
Name drive_data
Object Code RECORD
No. of Elements 51
Sub-Index 22h
Description position_error_switch_off_limitData Type UINT32
Access rw
Mapping PDO no
Units position units
Value Range 0 … 232-1
Default Value 0
Valor Significado
0 Valor límite del error de seguimiento OFF (reacción: NINGUNA ACCIÓN)
0 Valor límite del error de seguimiento ON (reacción: DESCONECTAR DE INMEDIATO EL
PASO DE SALIDA)

5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 119
La activación del error 17-0 se realiza mediante la modificación de la reacción de error. La reacción
DESCONECTAR INMEDIATAMENTE PASO DE SALIDA retorna como ON y todas las demás como OFF.
Al escribir 0 se activa la reacción de error NINGUNA ACCIÓN; si se escribe un valor mayor que 0 se
activa la reacción de error DESCONECTAR DE INMEDIATO EL PASO DE SALIDA. � capítulo 5.18
Gestión de errores.
Objeto 607Bh: position_range_limitEl grupo de objetos position_range_limit contiene dos subparámetros que limitan el margen numérico
de los valores de posición. Si se sobrepasa uno de los límites, el valor real de posición salta
automáticamente al otro límite respectivo. Esto hace posible la parametrización de lo que se conoce
como ejes redondos. Se deben indicar los límites que tienen que corresponder a la misma posición
física, p. ej., 0° y 360°.
Para que esos límites sean efectivos debe seleccionarse un modo de eje circular a través del objeto
6510h_20h (position_range_limit_enable).
Index 607Bh
Name position_range_limit
Object Code ARRAY
No. of Elements 2
Data Type INT32
Sub-Index 01h
Description min_position_range_limitAccess rw
Mapping PDO yes
Units position units
Value Range –
Default Value –
Sub-Index 02h
Description max_position_range_limitAccess rw
Mapping PDO yes
Units position units
Value Range –
Default Value –
Objeto 6510h_20h: position_range_limit_enableMediante el objeto position_range_limit_enable se pueden activar los límites de margen definidos con
el objeto 607Bh. Hay varios modos posibles:
Si se escoge el modo “Recorrido más corto”, los posicionamientos se ejecutan siempre por el recorrido
que resulta más corto físicamente hasta el destino. Para ello el accionamiento adapta él mismo el signo
de la velocidad de desplazamiento. En los dos modos “Sentido de giro fijo” el posicionamiento se re
aliza sólo en el sentido indicado en el modo.
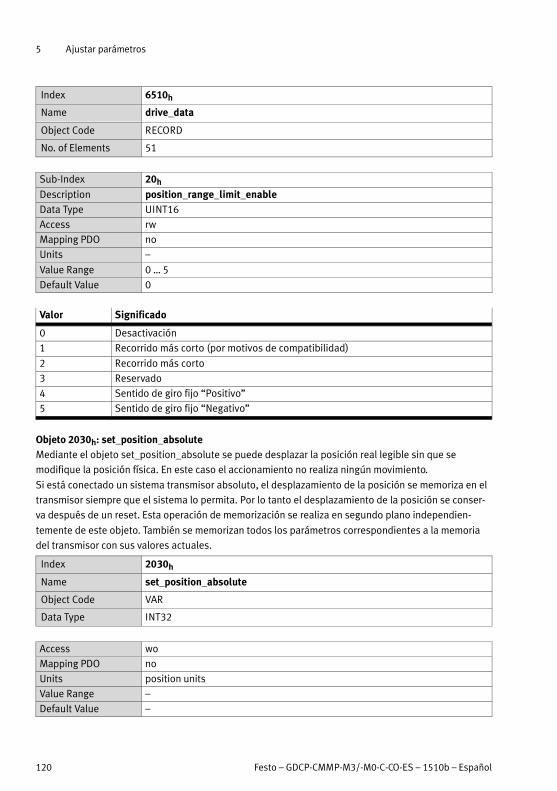
5 Ajustar parámetros
120 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Index 6510h
Name drive_data
Object Code RECORD
No. of Elements 51
Sub-Index 20h
Description position_range_limit_enableData Type UINT16
Access rw
Mapping PDO no
Units –
Value Range 0 … 5
Default Value 0
Valor Significado
0 Desactivación
1 Recorrido más corto (por motivos de compatibilidad)
2 Recorrido más corto
3 Reservado
4 Sentido de giro fijo “Positivo”
5 Sentido de giro fijo “Negativo”
Objeto 2030h: set_position_absoluteMediante el objeto set_position_absolute se puede desplazar la posición real legible sin que se
modifique la posición física. En este caso el accionamiento no realiza ningún movimiento.
Si está conectado un sistema transmisor absoluto, el desplazamiento de la posición se memoriza en el
transmisor siempre que el sistema lo permita. Por lo tanto el desplazamiento de la posición se conser
va después de un reset. Esta operación de memorización se realiza en segundo plano independien
temente de este objeto. También se memorizan todos los parámetros correspondientes a la memoria
del transmisor con sus valores actuales.
Index 2030h
Name set_position_absolute
Object Code VAR
Data Type INT32
Access wo
Mapping PDO no
Units position units
Value Range –
Default Value –
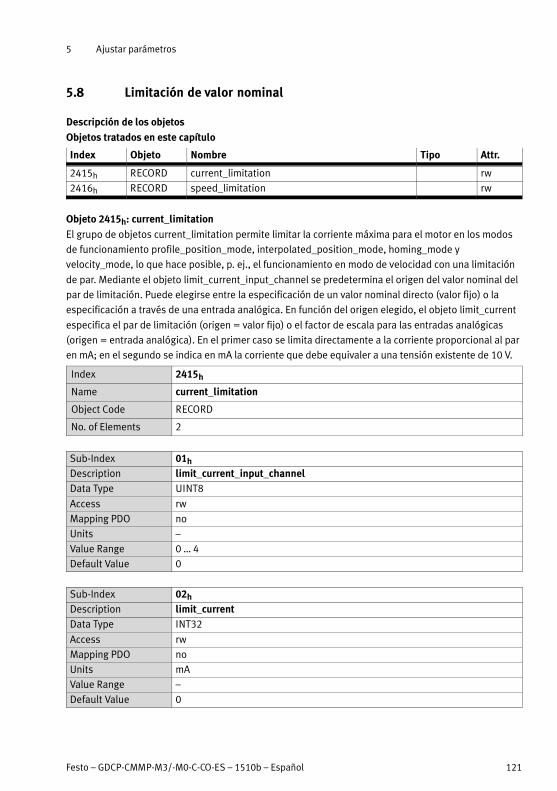
5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 121
5.8 Limitación de valor nominal
Descripción de los objetos
Objetos tratados en este capítulo
Index Objeto Nombre Tipo Attr.
2415h RECORD current_limitation rw
2416h RECORD speed_limitation rw
Objeto 2415h: current_limitation
El grupo de objetos current_limitation permite limitar la corriente máxima para el motor en los modos
de funcionamiento profile_position_mode, interpolated_position_mode, homing_mode y
velocity_mode, lo que hace posible, p. ej., el funcionamiento en modo de velocidad con una limitación
de par. Mediante el objeto limit_current_input_channel se predetermina el origen del valor nominal del
par de limitación. Puede elegirse entre la especificación de un valor nominal directo (valor fijo) o la
especificación a través de una entrada analógica. En función del origen elegido, el objeto limit_current
especifica el par de limitación (origen = valor fijo) o el factor de escala para las entradas analógicas
(origen = entrada analógica). En el primer caso se limita directamente a la corriente proporcional al par
en mA; en el segundo se indica en mA la corriente que debe equivaler a una tensión existente de 10 V.
Index 2415h
Name current_limitation
Object Code RECORD
No. of Elements 2
Sub-Index 01h
Description limit_current_input_channelData Type UINT8
Access rw
Mapping PDO no
Units –
Value Range 0 … 4
Default Value 0
Sub-Index 02h
Description limit_currentData Type INT32
Access rw
Mapping PDO no
Units mA
Value Range –
Default Value 0
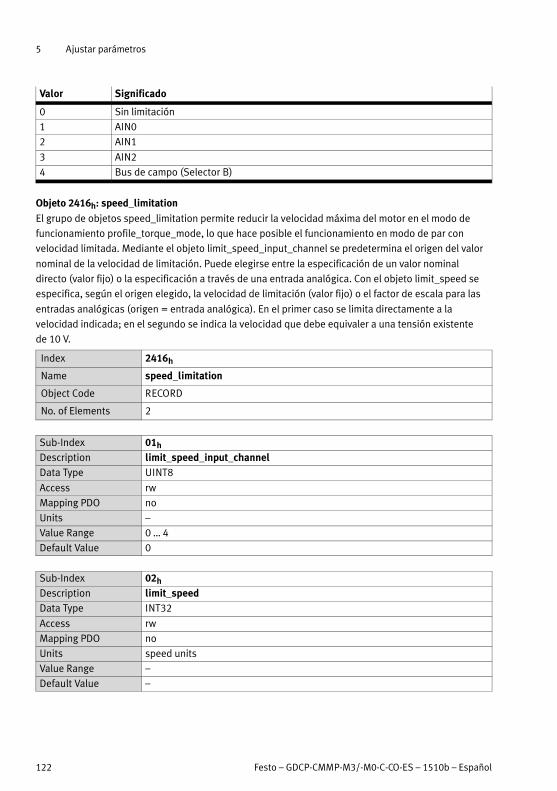
5 Ajustar parámetros
122 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Valor Significado
0 Sin limitación
1 AIN0
2 AIN1
3 AIN2
4 Bus de campo (Selector B)
Objeto 2416h: speed_limitation
El grupo de objetos speed_limitation permite reducir la velocidad máxima del motor en el modo de
funcionamiento profile_torque_mode, lo que hace posible el funcionamiento en modo de par con
velocidad limitada. Mediante el objeto limit_speed_input_channel se predetermina el origen del valor
nominal de la velocidad de limitación. Puede elegirse entre la especificación de un valor nominal
directo (valor fijo) o la especificación a través de una entrada analógica. Con el objeto limit_speed se
especifica, según el origen elegido, la velocidad de limitación (valor fijo) o el factor de escala para las
entradas analógicas (origen = entrada analógica). En el primer caso se limita directamente a la
velocidad indicada; en el segundo se indica la velocidad que debe equivaler a una tensión existente
de 10 V.
Index 2416h
Name speed_limitation
Object Code RECORD
No. of Elements 2
Sub-Index 01h
Description limit_speed_input_channelData Type UINT8
Access rw
Mapping PDO no
Units –
Value Range 0 … 4
Default Value 0
Sub-Index 02h
Description limit_speedData Type INT32
Access rw
Mapping PDO no
Units speed units
Value Range –
Default Value –

5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 123
Valor Significado
0 Sin limitación
1 AIN0
2 AIN1
3 AIN2
4 Bus de campo (Selector B)

5 Ajustar parámetros
124 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
5.9 Adaptaciones del transmisor
Cuadro general
Este capítulo describe la configuración de la entrada del transmisor de ángulo [X2A], [X2B] y de la en
trada incremental [X10].
AtenciónLos ajustes incorrectos en el transductor angular pueden hacer girar el accionamiento
de forma descontrolada y dañar partes del sistema.
Descripción de los objetosObjetos tratados en este capítulo
Index Objeto Nombre Tipo Attr.
2024h RECORD encoder_x2a_data_field ro
2024h_01h VAR encoder_x2a_resolution UINT32 ro
2024h_02h VAR encoder_x2a_numerator INT16 rw
2024h_03h VAR encoder_x2a_divisor INT16 rw
2025h RECORD encoder_x10_data_field ro
2025h_01h VAR encoder_x10_resolution UINT32 rw
2025h_02h VAR encoder_x10_numerator INT16 rw
2025h_03h VAR encoder_x10_divisor INT16 rw
2025h_04h VAR encoder_x10_counter UINT32 ro
2026h RECORD encoder_x2b_data_field ro
2026h_01h VAR encoder_x2b_resolution UINT32 rw
2026h_02h VAR encoder_x2b_numerator INT16 rw
2026h_03h VAR encoder_x2b_divisor INT16 rw
2026h_04h VAR encoder_x2b_counter UINT32 ro
Objeto 2024h: encoder_x2a_data_fieldEl registro encoder_x2a_data_field reúne parámetros que son necesarios para el funcionamiento del
transmisor de ángulo en el conector [X2A].
Dado que muchos ajustes del transmisor de ángulo únicamente son efectivos después de un reset,
la selección y el ajuste del transmisor se deben llevar a cabo mediante el software de parametrización.
En CANopen se pueden leer o modificar los ajustes siguientes:
El objeto encoder_x2a_resolution indica cuántos incrementos crea el transductor por cada revolución
o unidad de longitud. Dado que en la entrada [X2A] no se pueden conectar más que resolvers que se
evalúan siempre con 16 bits, aquí se devuelve siempre el valor 65536. Con los objetos
encoder_x2a_numerator y encoder_x2a_divisor se puede considerar un reductor eventual (también
con signo) entre el árbol del motor y el transductor.

5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 125
Index 2024h
Name encoder_x2a_data_field
Object Code RECORD
No. of Elements 3
Sub-Index 01h
Description encoder_x2a_resolutionData Type UINT32
Access ro
Mapping PDO no
Units Incrementos (4 * número de impulsos)
Value Range –
Default Value 65536
Sub-Index 02h
Description encoder_x2a_numeratorData Type INT16
Access rw
Mapping PDO no
Units –
Value Range –32768 … 32767 (excepto 0)
Default Value 1
Sub-Index 03h
Description encoder_x2a_divisorData Type INT16
Access rw
Mapping PDO no
Units –
Value Range 1 … 32767
Default Value 1
Objeto 2026h: encoder_x2b_data_field
El registro encoder_x2b_data_field reúne parámetros que son necesarios para el funcionamiento del
transmisor de ángulo en el conector [X2B].
El objeto encoder_x2b_resolution indica cuántos incrementos crea el transductor por cada revolución
o unidad de longitud (en encoders incrementales equivale al número de impulsos o de períodos por
revolución multiplicado por cuatro).
El objeto encoder_x2b_counter muestra el número de incrementos contado actualmente. Por lo tanto
suministra valores entre 0 y el número ajustado de incrementos-1.
Los objetos encoder_x2b_numerator y encoder_x2b_divisor permiten considerar un reductor entre el
árbol del motor y el transmisor conectado a [X2B].
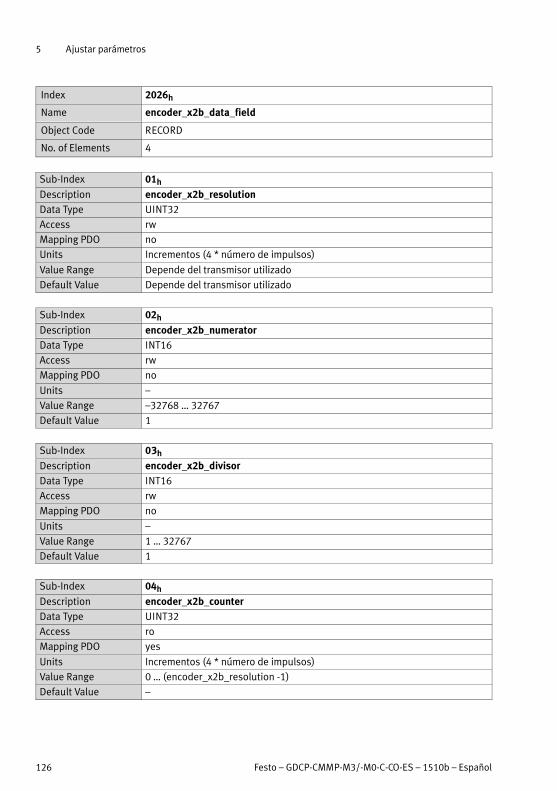
5 Ajustar parámetros
126 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Index 2026h
Name encoder_x2b_data_field
Object Code RECORD
No. of Elements 4
Sub-Index 01h
Description encoder_x2b_resolutionData Type UINT32
Access rw
Mapping PDO no
Units Incrementos (4 * número de impulsos)
Value Range Depende del transmisor utilizado
Default Value Depende del transmisor utilizado
Sub-Index 02h
Description encoder_x2b_numeratorData Type INT16
Access rw
Mapping PDO no
Units –
Value Range –32768 … 32767
Default Value 1
Sub-Index 03h
Description encoder_x2b_divisorData Type INT16
Access rw
Mapping PDO no
Units –
Value Range 1 … 32767
Default Value 1
Sub-Index 04h
Description encoder_x2b_counterData Type UINT32
Access ro
Mapping PDO yes
Units Incrementos (4 * número de impulsos)
Value Range 0 … (encoder_x2b_resolution -1)
Default Value –
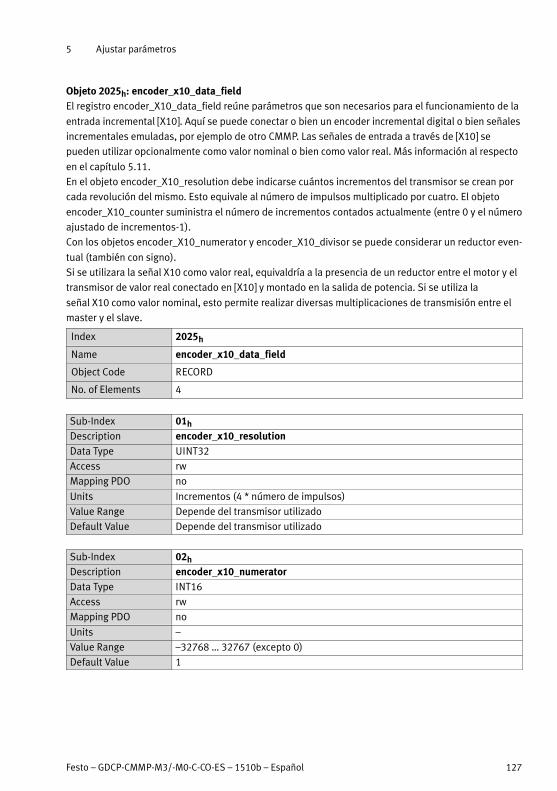
5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 127
Objeto 2025h: encoder_x10_data_fieldEl registro encoder_X10_data_field reúne parámetros que son necesarios para el funcionamiento de la
entrada incremental [X10]. Aquí se puede conectar o bien un encoder incremental digital o bien señales
incrementales emuladas, por ejemplo de otro CMMP. Las señales de entrada a través de [X10] se
pueden utilizar opcionalmente como valor nominal o bien como valor real. Más información al respecto
en el capítulo 5.11.
En el objeto encoder_X10_resolution debe indicarse cuántos incrementos del transmisor se crean por
cada revolución del mismo. Esto equivale al número de impulsos multiplicado por cuatro. El objeto
encoder_X10_counter suministra el número de incrementos contados actualmente (entre 0 y el número
ajustado de incrementos-1).
Con los objetos encoder_X10_numerator y encoder_X10_divisor se puede considerar un reductor even
tual (también con signo).
Si se utilizara la señal X10 como valor real, equivaldría a la presencia de un reductor entre el motor y el
transmisor de valor real conectado en [X10] y montado en la salida de potencia. Si se utiliza la
señal X10 como valor nominal, esto permite realizar diversas multiplicaciones de transmisión entre el
master y el slave.
Index 2025h
Name encoder_x10_data_field
Object Code RECORD
No. of Elements 4
Sub-Index 01h
Description encoder_x10_resolutionData Type UINT32
Access rw
Mapping PDO no
Units Incrementos (4 * número de impulsos)
Value Range Depende del transmisor utilizado
Default Value Depende del transmisor utilizado
Sub-Index 02h
Description encoder_x10_numeratorData Type INT16
Access rw
Mapping PDO no
Units –
Value Range –32768 … 32767 (excepto 0)
Default Value 1

5 Ajustar parámetros
128 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Sub-Index 03h
Description encoder_x10_divisor
Data Type INT16
Access rw
Mapping PDO no
Units –
Value Range 1 … 32767
Default Value 1
Sub-Index 04h
Description encoder_x10_counter
Data Type UINT32
Access ro
Mapping PDO yes
Units Incrementos (4 * número de impulsos)
Value Range 0 … (encoder_x10_resolution -1)
Default Value –
5.10 Emulación de encoder incremental
Cuadro generalEste grupo de objetos permite parametrizar la salida del transmisor incremental [X11]. Así, las aplicac
iones master-slave en las que la salida [X11] del master está conectada a la entrada [X10] del slave se
pueden parametrizar con CANopen.
Descripción de los objetosObjetos tratados en este capítulo
Index Objeto Nombre Tipo Attr.
2028h VAR encoder_emulation_resolution INT32 rw
201Ah RECORD encoder_emulation_data ro
201Ah_01h VAR encoder_emulation_resolution INT32 rw
201Ah_02h VAR encoder_emulation_offset INT16 rw
Objeto 201Ah: encoder_emulation_dataEl registro de objeto encoder_emulation_data encapsula todas las opciones de ajuste de la salida del
transmisor incremental [X11]:
El objeto encoder_emulation_resolution permite ajustar libremente el número de incrementos emitidos
(= número de impulsos por cuatro) a un múltiplo de 4. En una aplicación master-slave debe correspon
der a la encoder_X10_resolution del slave para obtener una relación de 1:1.
Con el objeto encoder_emulation_offset se puede desplazar la posición del impulso de puesta a cero
emitido frente a la posición cero del transmisor de valor real.
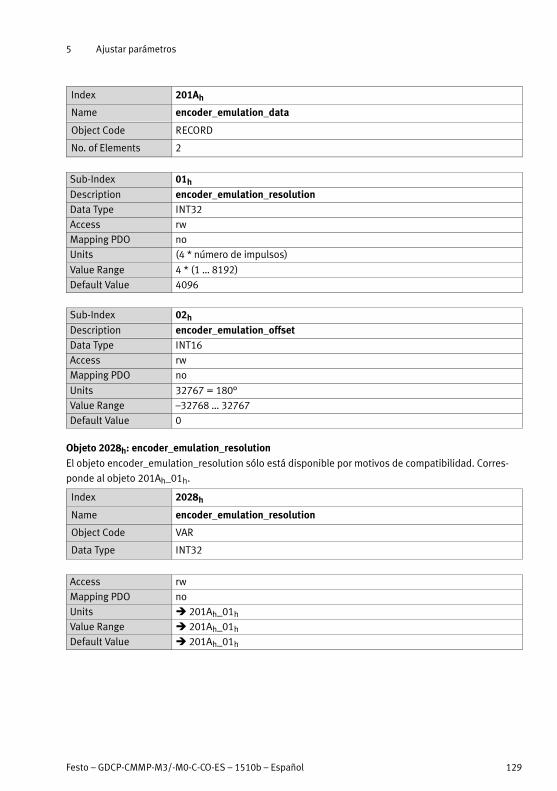
5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 129
Index 201Ah
Name encoder_emulation_data
Object Code RECORD
No. of Elements 2
Sub-Index 01h
Description encoder_emulation_resolutionData Type INT32
Access rw
Mapping PDO no
Units (4 * número de impulsos)
Value Range 4 * (1 … 8192)
Default Value 4096
Sub-Index 02h
Description encoder_emulation_offsetData Type INT16
Access rw
Mapping PDO no
Units 32767 = 180°
Value Range –32768 … 32767
Default Value 0
Objeto 2028h: encoder_emulation_resolution
El objeto encoder_emulation_resolution sólo está disponible por motivos de compatibilidad. Corres
ponde al objeto 201Ah_01h.
Index 2028h
Name encoder_emulation_resolution
Object Code VAR
Data Type INT32
Access rw
Mapping PDO no
Units � 201Ah_01h
Value Range � 201Ah_01h
Default Value � 201Ah_01h
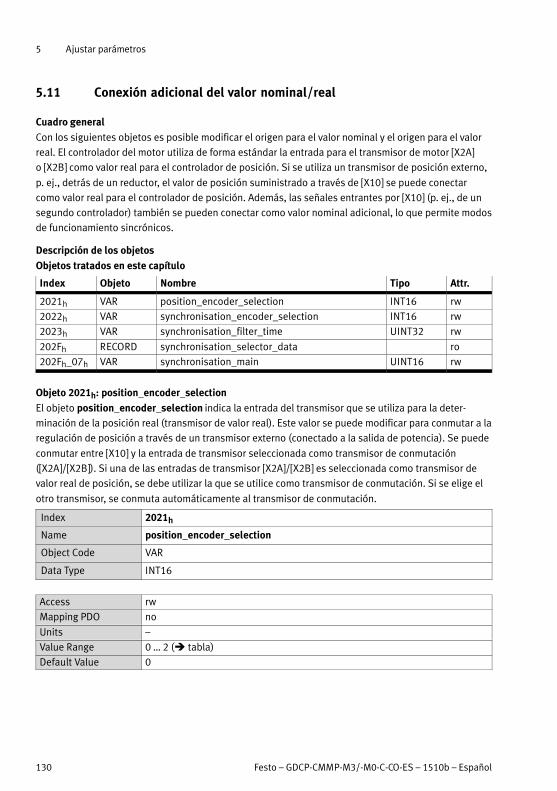
5 Ajustar parámetros
130 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
5.11 Conexión adicional del valor nominal/real
Cuadro general
Con los siguientes objetos es posible modificar el origen para el valor nominal y el origen para el valor
real. El controlador del motor utiliza de forma estándar la entrada para el transmisor de motor [X2A]
o [X2B] como valor real para el controlador de posición. Si se utiliza un transmisor de posición externo,
p. ej., detrás de un reductor, el valor de posición suministrado a través de [X10] se puede conectar
como valor real para el controlador de posición. Además, las señales entrantes por [X10] (p. ej., de un
segundo controlador) también se pueden conectar como valor nominal adicional, lo que permite modos
de funcionamiento sincrónicos.
Descripción de los objetos
Objetos tratados en este capítulo
Index Objeto Nombre Tipo Attr.
2021h VAR position_encoder_selection INT16 rw
2022h VAR synchronisation_encoder_selection INT16 rw
2023h VAR synchronisation_filter_time UINT32 rw
202Fh RECORD synchronisation_selector_data ro
202Fh_07h VAR synchronisation_main UINT16 rw
Objeto 2021h: position_encoder_selection
El objeto position_encoder_selection indica la entrada del transmisor que se utiliza para la deter
minación de la posición real (transmisor de valor real). Este valor se puede modificar para conmutar a la
regulación de posición a través de un transmisor externo (conectado a la salida de potencia). Se puede
conmutar entre [X10] y la entrada de transmisor seleccionada como transmisor de conmutación
([X2A]/[X2B]). Si una de las entradas de transmisor [X2A]/[X2B] es seleccionada como transmisor de
valor real de posición, se debe utilizar la que se utilice como transmisor de conmutación. Si se elige el
otro transmisor, se conmuta automáticamente al transmisor de conmutación.
Index 2021h
Name position_encoder_selection
Object Code VAR
Data Type INT16
Access rw
Mapping PDO no
Units –
Value Range 0 … 2 (� tabla)
Default Value 0
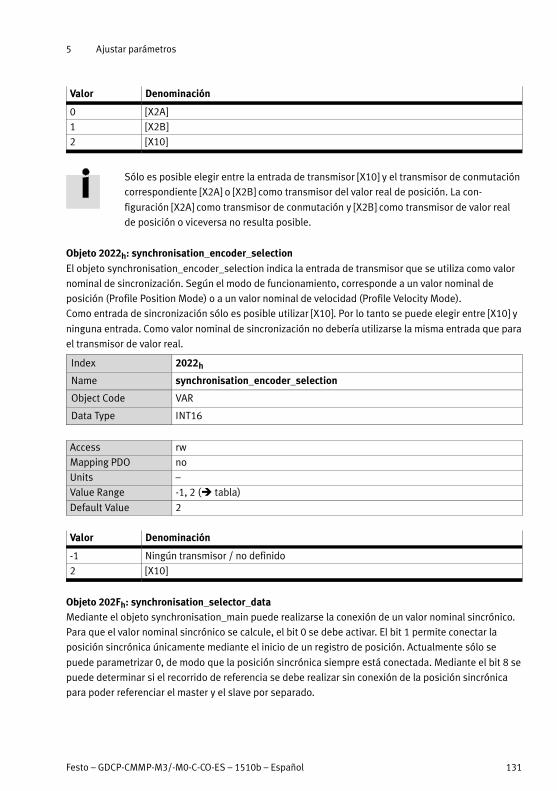
5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 131
Valor Denominación
0 [X2A]
1 [X2B]
2 [X10]
Sólo es posible elegir entre la entrada de transmisor [X10] y el transmisor de conmutación
correspondiente [X2A] o [X2B] como transmisor del valor real de posición. La con
figuración [X2A] como transmisor de conmutación y [X2B] como transmisor de valor real
de posición o viceversa no resulta posible.
Objeto 2022h: synchronisation_encoder_selection
El objeto synchronisation_encoder_selection indica la entrada de transmisor que se utiliza como valor
nominal de sincronización. Según el modo de funcionamiento, corresponde a un valor nominal de
posición (Profile Position Mode) o a un valor nominal de velocidad (Profile Velocity Mode).
Como entrada de sincronización sólo es posible utilizar [X10]. Por lo tanto se puede elegir entre [X10] y
ninguna entrada. Como valor nominal de sincronización no debería utilizarse la misma entrada que para
el transmisor de valor real.
Index 2022h
Name synchronisation_encoder_selection
Object Code VAR
Data Type INT16
Access rw
Mapping PDO no
Units –
Value Range -1, 2 (� tabla)
Default Value 2
Valor Denominación
-1 Ningún transmisor / no definido
2 [X10]
Objeto 202Fh: synchronisation_selector_dataMediante el objeto synchronisation_main puede realizarse la conexión de un valor nominal sincrónico.
Para que el valor nominal sincrónico se calcule, el bit 0 se debe activar. El bit 1 permite conectar la
posición sincrónica únicamente mediante el inicio de un registro de posición. Actualmente sólo se
puede parametrizar 0, de modo que la posición sincrónica siempre está conectada. Mediante el bit 8 se
puede determinar si el recorrido de referencia se debe realizar sin conexión de la posición sincrónica
para poder referenciar el master y el slave por separado.
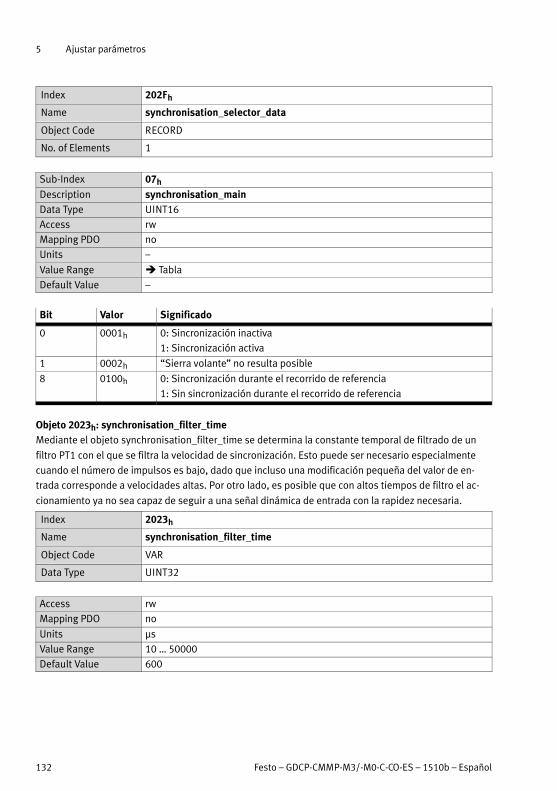
5 Ajustar parámetros
132 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Index 202Fh
Name synchronisation_selector_data
Object Code RECORD
No. of Elements 1
Sub-Index 07h
Description synchronisation_mainData Type UINT16
Access rw
Mapping PDO no
Units –
Value Range � Tabla
Default Value –
Bit Valor Significado
0 0001h 0: Sincronización inactiva
1: Sincronización activa
1 0002h “Sierra volante” no resulta posible
8 0100h 0: Sincronización durante el recorrido de referencia
1: Sin sincronización durante el recorrido de referencia
Objeto 2023h: synchronisation_filter_timeMediante el objeto synchronisation_filter_time se determina la constante temporal de filtrado de un
filtro PT1 con el que se filtra la velocidad de sincronización. Esto puede ser necesario especialmente
cuando el número de impulsos es bajo, dado que incluso una modificación pequeña del valor de en
trada corresponde a velocidades altas. Por otro lado, es posible que con altos tiempos de filtro el ac
cionamiento ya no sea capaz de seguir a una señal dinámica de entrada con la rapidez necesaria.
Index 2023h
Name synchronisation_filter_time
Object Code VAR
Data Type UINT32
Access rw
Mapping PDO no
Units μs
Value Range 10 … 50000
Default Value 600
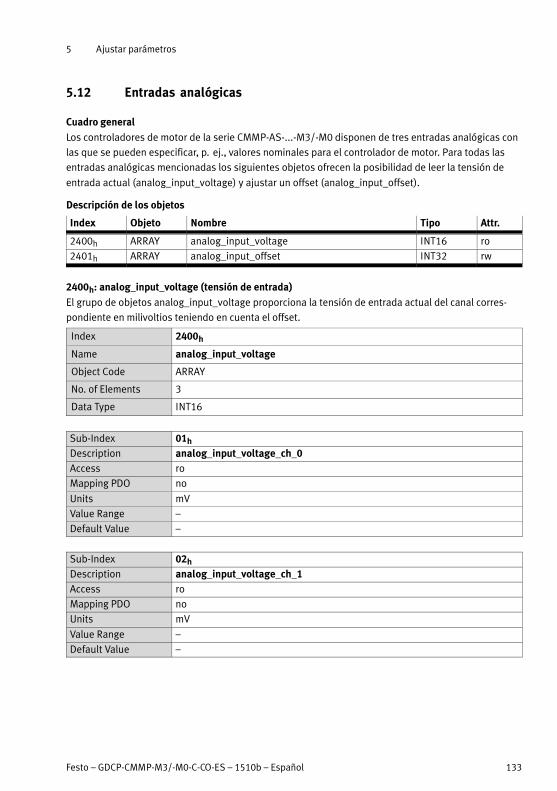
5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 133
5.12 Entradas analógicas
Cuadro general
Los controladores de motor de la serie CMMP‐AS‐...‐M3/-M0 disponen de tres entradas analógicas con
las que se pueden especificar, p. ej., valores nominales para el controlador de motor. Para todas las
entradas analógicas mencionadas los siguientes objetos ofrecen la posibilidad de leer la tensión de
entrada actual (analog_input_voltage) y ajustar un offset (analog_input_offset).
Descripción de los objetos
Index Objeto Nombre Tipo Attr.
2400h ARRAY analog_input_voltage INT16 ro
2401h ARRAY analog_input_offset INT32 rw
2400h: analog_input_voltage (tensión de entrada)
El grupo de objetos analog_input_voltage proporciona la tensión de entrada actual del canal corres
pondiente en milivoltios teniendo en cuenta el offset.
Index 2400h
Name analog_input_voltage
Object Code ARRAY
No. of Elements 3
Data Type INT16
Sub-Index 01h
Description analog_input_voltage_ch_0Access ro
Mapping PDO no
Units mV
Value Range –
Default Value –
Sub-Index 02h
Description analog_input_voltage_ch_1Access ro
Mapping PDO no
Units mV
Value Range –
Default Value –
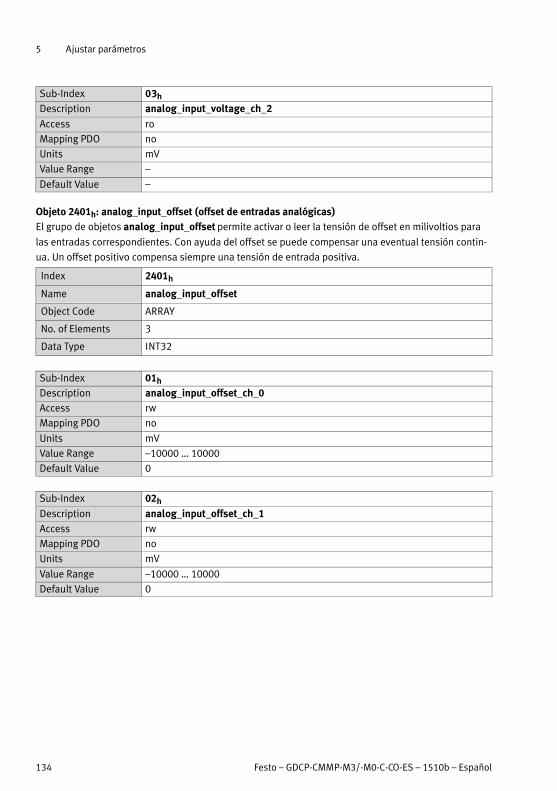
5 Ajustar parámetros
134 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Sub-Index 03h
Description analog_input_voltage_ch_2
Access ro
Mapping PDO no
Units mV
Value Range –
Default Value –
Objeto 2401h: analog_input_offset (offset de entradas analógicas)El grupo de objetos analog_input_offset permite activar o leer la tensión de offset en milivoltios para
las entradas correspondientes. Con ayuda del offset se puede compensar una eventual tensión contin
ua. Un offset positivo compensa siempre una tensión de entrada positiva.
Index 2401h
Name analog_input_offset
Object Code ARRAY
No. of Elements 3
Data Type INT32
Sub-Index 01h
Description analog_input_offset_ch_0Access rw
Mapping PDO no
Units mV
Value Range –10000 … 10000
Default Value 0
Sub-Index 02h
Description analog_input_offset_ch_1Access rw
Mapping PDO no
Units mV
Value Range –10000 … 10000
Default Value 0

5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 135
Sub-Index 03h
Description analog_input_offset_ch_2
Access rw
Mapping PDO no
Units mV
Value Range –10000 … 10000
Default Value 0
5.13 Entradas y salidas digitales
Cuadro generalTodas las entradas digitales del controlador de motor pueden leerse a través del bus CAN y casi todas
las salidas digitales pueden activarse como se desee. Además, a las salidas digitales del controlador de
motor se les pueden asignar mensajes de estado.
Descripción de los objetosObjetos tratados en este capítulo
Index Objeto Nombre Tipo Attr.
60FDh VAR digital_inputs UINT32 ro
60FEh ARRAY digital_outputs UINT32 rw
2420h RECORD digital_output_state_mapping ro
2420h_01h VAR dig_out_state_mapp_dout_1 UINT8 rw
2420h_02h VAR dig_out_state_mapp_dout_2 UINT8 rw
2420h_03h VAR dig_out_state_mapp_dout_3 UINT8 rw
Objeto 60FDh: digital_inputsMediante el objeto 60FDh pueden leerse las entradas digitales:
Index 60Fdh
Name digital_inputs
Object Code VAR
Data Type UINT32
Access ro
Mapping PDO yes
Units –
Value Range Según la tabla siguiente
Default Value 0

5 Ajustar parámetros
136 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Bit Valor Significado
0 00000001h Final de carrera negativo
1 00000002h Final de carrera positivo
2 00000004h Interruptor de referencia
3 00000008h Interlock (falta la habilitación del regulador o del paso de salida)
16 … 23 00FF0000h Entradas digitales del CAMC-D-8E8A
24 … 27 0F000000h DIN0 … DIN3
28 10000000h DIN8
29 20000000h DIN9
Objeto 60FEh: digital_outputsEl objeto 60FEh permite excitar las salidas digitales. Para ello, en el objeto digital_outputs_mask deben
indicarse las salidas digitales que deben ser activadas. Con el objeto digital_outputs_data pueden
activarse las salidas seleccionadas indistintamente. Se debe tener en cuenta que al activar las salidas
digitales puede haber un retardo de hasta 10 ms. Mediante la reposición del objeto 60FEh puede deter
minarse cuándo se activan realmente las salidas.
Index 60FEh
Name digital_outputs
Object Code ARRAY
No. of Elements 2
Data Type UINT32
Sub-Index 01h
Description digital_outputs_dataAccess rw
Mapping PDO yes
Units –
Value Range –
Default Value (Depende del estado del freno)
Sub-Index 02h
Description digital_outputs_mask
Access rw
Mapping PDO yes
Units –
Value Range –
Default Value 00000000h
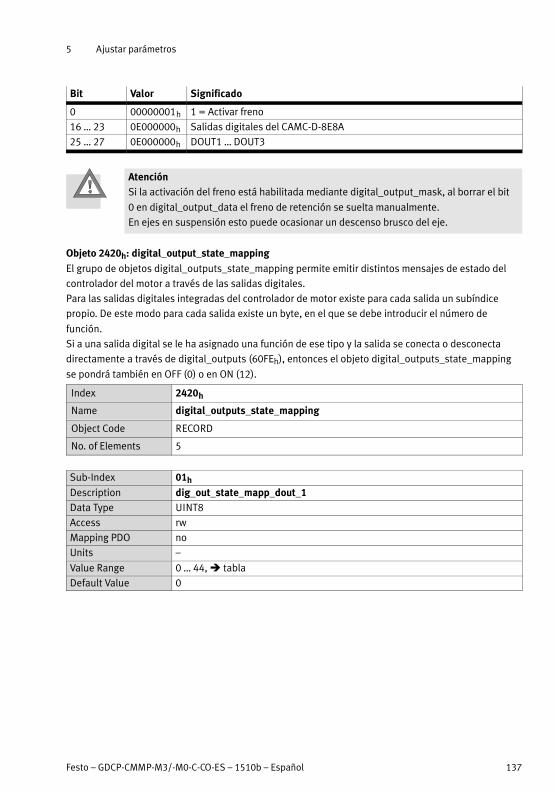
5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 137
Bit Valor Significado
0 00000001h 1 = Activar freno
16 … 23 0E000000h Salidas digitales del CAMC-D-8E8A
25 … 27 0E000000h DOUT1 … DOUT3
AtenciónSi la activación del freno está habilitada mediante digital_output_mask, al borrar el bit
0 en digital_output_data el freno de retención se suelta manualmente.
En ejes en suspensión esto puede ocasionar un descenso brusco del eje.
Objeto 2420h: digital_output_state_mapping
El grupo de objetos digital_outputs_state_mapping permite emitir distintos mensajes de estado del
controlador del motor a través de las salidas digitales.
Para las salidas digitales integradas del controlador de motor existe para cada salida un subíndice
propio. De este modo para cada salida existe un byte, en el que se debe introducir el número de
función.
Si a una salida digital se le ha asignado una función de ese tipo y la salida se conecta o desconecta
directamente a través de digital_outputs (60FEh), entonces el objeto digital_outputs_state_mapping
se pondrá también en OFF (0) o en ON (12).
Index 2420h
Name digital_outputs_state_mapping
Object Code RECORD
No. of Elements 5
Sub-Index 01h
Description dig_out_state_mapp_dout_1Data Type UINT8
Access rw
Mapping PDO no
Units –
Value Range 0 … 44, � tabla
Default Value 0

5 Ajustar parámetros
138 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Sub-Index 02h
Description dig_out_state_mapp_dout_2
Data Type UINT8
Access rw
Mapping PDO no
Units –
Value Range 0 … 44, � tabla
Default Value 0
Sub-Index 03h
Description dig_out_state_mapp_dout_3
Data Type UINT8
Access rw
Mapping PDO no
Units –
Value Range 0 … 44, � tabla
Default Value 0
Valor Denominación
0 Off (salida Low)
1 Posición Xnominal = Xobjetivo
2 Posición Xreal = Xobjetivo
3 Reservado
4 Trigger de recorrido restante activo
5 Recorrido de referencia activo
6 Velocidad comparativa alcanzada
7 I2t-Motor alcanzado
8 Error de seguimiento
9 Baja tensión en el circuito intermedio
10 Freno inmovilizador soltado
11 Paso de salida conectado
12 Off (salida High)
13 Error común activo
14 Al menos un bloqueo de valor nominal activo
15 Motor lineal identificado
16 Posición de referencia válida
17 Estado colectivo: preparado para habilitar el regulador
18 Trigger de posición 1
19 Trigger de posición 2
20 Trigger de posición 3
21 Trigger de posición 4
22 … 25 Reservado
26 Se ha alcanzado el objetivo alternativo

5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 139
Valor Denominación
27 Activo si el registro de posición está en marcha
28 Se ha alcanzado el par de comparación
29 Position x_nominal = x_objetivo (aun en caso de encadenamiento durante al menos
10 ms)
30 Señal Ack (activo low) como handshake para inicio de posicionamiento
31 Objetivo conseguido con handshake al inicio dig., no se activa mientras START esté
en nivel HIGH.
32 Disco de leva activo
33 Movimiento CAM-IN en marcha
34 CAM-CHANGE, como CAM-IN pero cambia a una curva nueva
35 Movimiento CAM-OUT en marcha
36 Nivel de habilitación digital de paso de salida, o sea nivel en DIN 4 (high, si DIN4
high)
37 Reservado
38 CAM activo sin movimiento CAM-IN o CAM-CHANGE
39 Valor real de velocidad en ventana de parada
40 Teach Acknowledge
41 Procedimiento de guardado (SAVE!, Save Positions) en marcha
42 STO activo
43 Se solicita STO
44 Motion Complete (MC)
Sub-Index 11h
Description dig_out_state_mapp_ea88_0_lowData Type UINT32
Access rw
Mapping PDO no
Units –
Value Range 0 … FFFFFFFFh, � tabla
Default Value 0
Bit Máscara Nombre Denominación
0 … 7 000000FFh EA88_0_dout_0_mapping Función para CAMC-D-8E8A 0 DOUT1
8 … 15 0000FF00h EA88_0_dout_1_mapping Función para CAMC-D-8E8A 0 DOUT2
16 … 23 00FF0000h EA88_0_dout_2_mapping Función para CAMC-D-8E8A 0 DOUT3
24 … 31 FF000000h EA88_0_dout_3_mapping Función para CAMC-D-8E8A 0 DOUT4
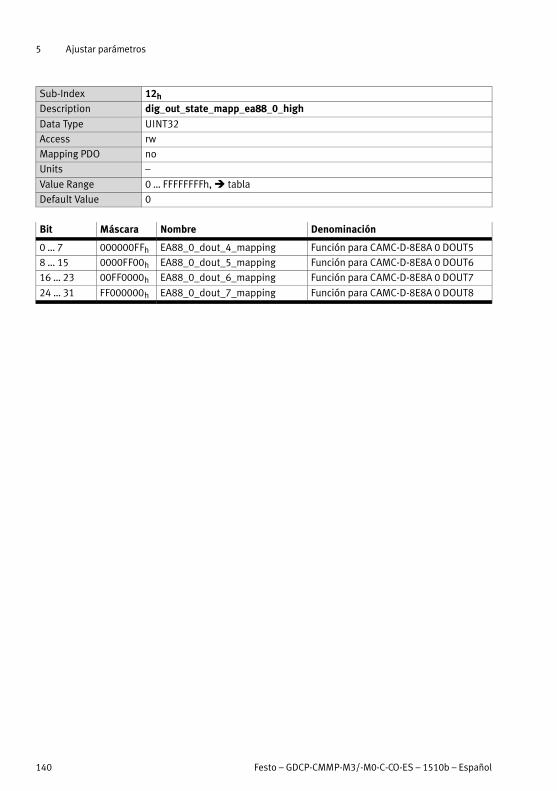
5 Ajustar parámetros
140 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Sub-Index 12h
Description dig_out_state_mapp_ea88_0_high
Data Type UINT32
Access rw
Mapping PDO no
Units –
Value Range 0 … FFFFFFFFh, � tabla
Default Value 0
Bit Máscara Nombre Denominación
0 … 7 000000FFh EA88_0_dout_4_mapping Función para CAMC-D-8E8A 0 DOUT5
8 … 15 0000FF00h EA88_0_dout_5_mapping Función para CAMC-D-8E8A 0 DOUT6
16 … 23 00FF0000h EA88_0_dout_6_mapping Función para CAMC-D-8E8A 0 DOUT7
24 … 31 FF000000h EA88_0_dout_7_mapping Función para CAMC-D-8E8A 0 DOUT8
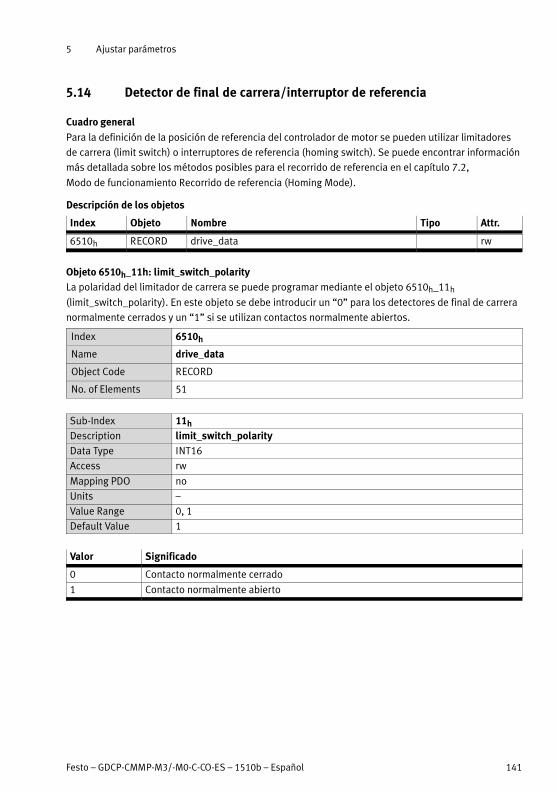
5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 141
5.14 Detector de final de carrera/interruptor de referencia
Cuadro general
Para la definición de la posición de referencia del controlador de motor se pueden utilizar limitadores
de carrera (limit switch) o interruptores de referencia (homing switch). Se puede encontrar información
más detallada sobre los métodos posibles para el recorrido de referencia en el capítulo 7.2,
Modo de funcionamiento Recorrido de referencia (Homing Mode).
Descripción de los objetos
Index Objeto Nombre Tipo Attr.
6510h RECORD drive_data rw
Objeto 6510h_11h: limit_switch_polarityLa polaridad del limitador de carrera se puede programar mediante el objeto 6510h_11h
(limit_switch_polarity). En este objeto se debe introducir un “0” para los detectores de final de carrera
normalmente cerrados y un “1” si se utilizan contactos normalmente abiertos.
Index 6510h
Name drive_data
Object Code RECORD
No. of Elements 51
Sub-Index 11h
Description limit_switch_polarityData Type INT16
Access rw
Mapping PDO no
Units –
Value Range 0, 1
Default Value 1
Valor Significado
0 Contacto normalmente cerrado
1 Contacto normalmente abierto
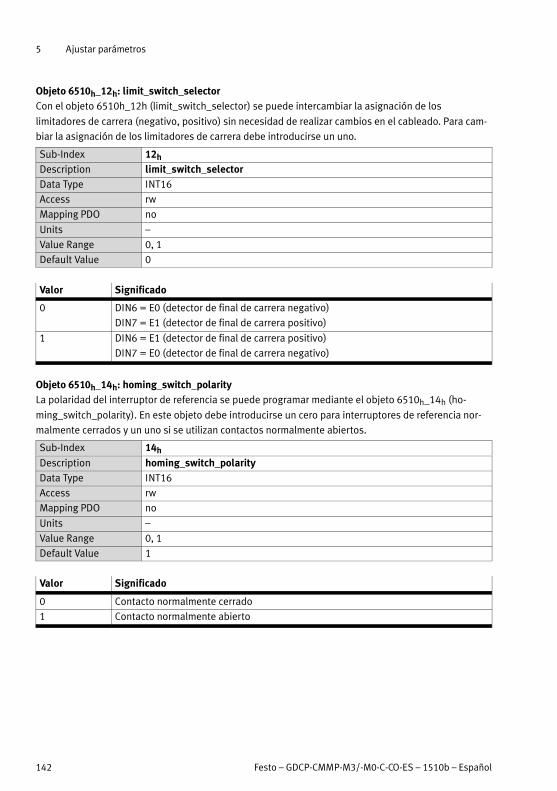
5 Ajustar parámetros
142 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Objeto 6510h_12h: limit_switch_selectorCon el objeto 6510h_12h (limit_switch_selector) se puede intercambiar la asignación de los
limitadores de carrera (negativo, positivo) sin necesidad de realizar cambios en el cableado. Para cam
biar la asignación de los limitadores de carrera debe introducirse un uno.
Sub-Index 12h
Description limit_switch_selectorData Type INT16
Access rw
Mapping PDO no
Units –
Value Range 0, 1
Default Value 0
Valor Significado
0 DIN6 = E0 (detector de final de carrera negativo)
DIN7 = E1 (detector de final de carrera positivo)
1 DIN6 = E1 (detector de final de carrera positivo)
DIN7 = E0 (detector de final de carrera negativo)
Objeto 6510h_14h: homing_switch_polarityLa polaridad del interruptor de referencia se puede programar mediante el objeto 6510h_14h (ho
ming_switch_polarity). En este objeto debe introducirse un cero para interruptores de referencia nor
malmente cerrados y un uno si se utilizan contactos normalmente abiertos.
Sub-Index 14h
Description homing_switch_polarityData Type INT16
Access rw
Mapping PDO no
Units –
Value Range 0, 1
Default Value 1
Valor Significado
0 Contacto normalmente cerrado
1 Contacto normalmente abierto
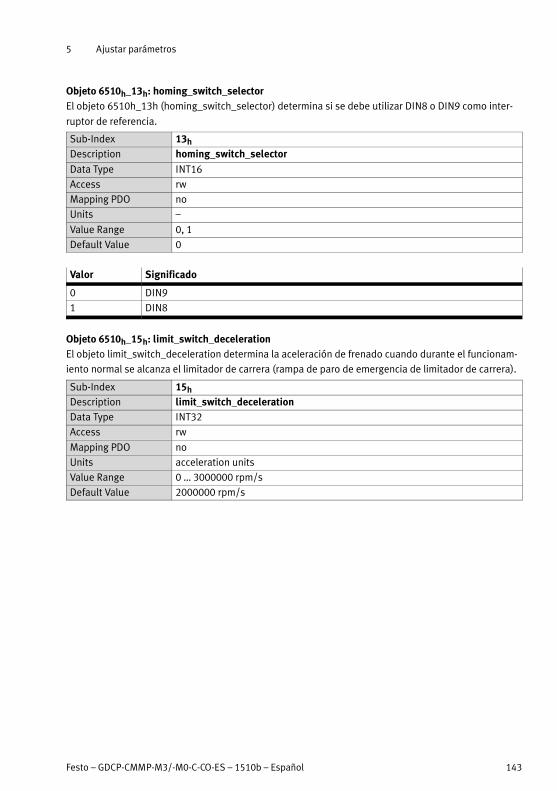
5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 143
Objeto 6510h_13h: homing_switch_selectorEl objeto 6510h_13h (homing_switch_selector) determina si se debe utilizar DIN8 o DIN9 como inter
ruptor de referencia.
Sub-Index 13h
Description homing_switch_selector
Data Type INT16
Access rw
Mapping PDO no
Units –
Value Range 0, 1
Default Value 0
Valor Significado
0 DIN9
1 DIN8
Objeto 6510h_15h: limit_switch_decelerationEl objeto limit_switch_deceleration determina la aceleración de frenado cuando durante el funcionam
iento normal se alcanza el limitador de carrera (rampa de paro de emergencia de limitador de carrera).
Sub-Index 15h
Description limit_switch_decelerationData Type INT32
Access rw
Mapping PDO no
Units acceleration units
Value Range 0 … 3000000 rpm/s
Default Value 2000000 rpm/s
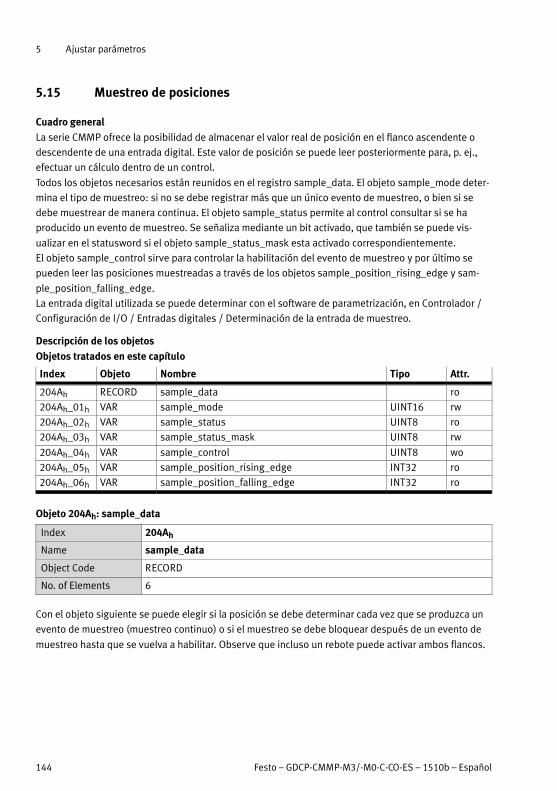
5 Ajustar parámetros
144 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
5.15 Muestreo de posiciones
Cuadro general
La serie CMMP ofrece la posibilidad de almacenar el valor real de posición en el flanco ascendente o
descendente de una entrada digital. Este valor de posición se puede leer posteriormente para, p. ej.,
efectuar un cálculo dentro de un control.
Todos los objetos necesarios están reunidos en el registro sample_data. El objeto sample_mode deter
mina el tipo de muestreo: si no se debe registrar más que un único evento de muestreo, o bien si se
debe muestrear de manera continua. El objeto sample_status permite al control consultar si se ha
producido un evento de muestreo. Se señaliza mediante un bit activado, que también se puede vis
ualizar en el statusword si el objeto sample_status_mask esta activado correspondientemente.
El objeto sample_control sirve para controlar la habilitación del evento de muestreo y por último se
pueden leer las posiciones muestreadas a través de los objetos sample_position_rising_edge y sam
ple_position_falling_edge.
La entrada digital utilizada se puede determinar con el software de parametrización, en Controlador /
Configuración de I/O / Entradas digitales / Determinación de la entrada de muestreo.
Descripción de los objetos
Objetos tratados en este capítulo
Index Objeto Nombre Tipo Attr.
204Ah RECORD sample_data ro
204Ah_01h VAR sample_mode UINT16 rw
204Ah_02h VAR sample_status UINT8 ro
204Ah_03h VAR sample_status_mask UINT8 rw
204Ah_04h VAR sample_control UINT8 wo
204Ah_05h VAR sample_position_rising_edge INT32 ro
204Ah_06h VAR sample_position_falling_edge INT32 ro
Objeto 204Ah: sample_data
Index 204Ah
Name sample_data
Object Code RECORD
No. of Elements 6
Con el objeto siguiente se puede elegir si la posición se debe determinar cada vez que se produzca un
evento de muestreo (muestreo continuo) o si el muestreo se debe bloquear después de un evento de
muestreo hasta que se vuelva a habilitar. Observe que incluso un rebote puede activar ambos flancos.

5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 145
Sub-Index 01h
Description sample_mode
Data Type UINT16
Access rw
Mapping PDO no
Units –
Value Range 0 … 1, � tabla
Default Value 0
Valor Denominación
0 Muestreo continuo
1 Muestreo Autolock
El objeto siguiente muestra un evento de muestreo nuevo.
Sub-Index 02h
Description sample_status
Data Type UINT8
Access ro
Mapping PDO yes
Units –
Value Range 0 … 3, � tabla
Default Value 0
Bit Valor Nombre Descripción
0 01h falling_edge_occurred = 1: Nueva posición de muestreo
(flanco descendente)
1 02h rising_edge_occurred = 1: Nueva posición de muestreo
(flanco ascendente)
Con el siguiente objeto se pueden determinar los bits del objeto sample_status, que también sirven
para activar el bit 15 del statusword. Con ello, la información “Se ha producido un evento de muestreo”
está presente en el statusword que se debe transferir de todos modos, por lo que sólo en este caso el
control debe leer el objeto sample_status para determinar, en caso necesario, qué flanco ha aparecido.
Sub-Index 03h
Description sample_status_maskData Type UINT8
Access rw
Mapping PDO yes
Units –
Value Range 0 … 1, � tabla
Default Value 0
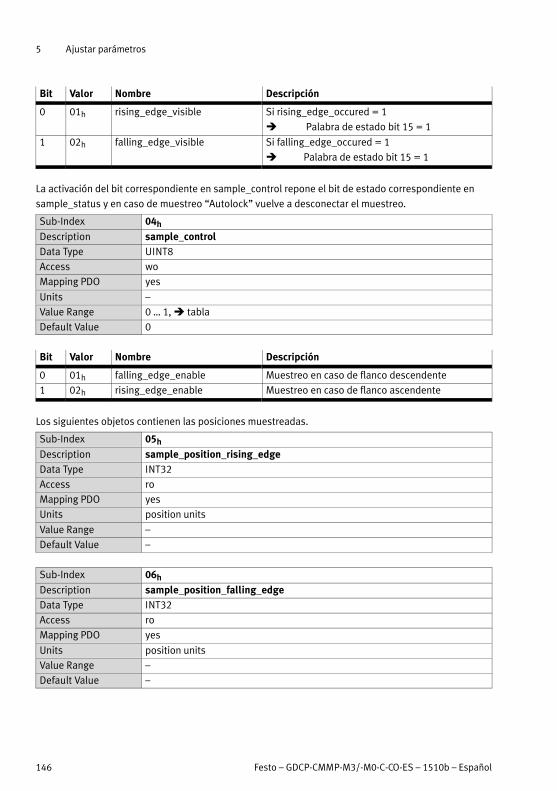
5 Ajustar parámetros
146 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Bit Valor Nombre Descripción
0 01h rising_edge_visible Si rising_edge_occured = 1
� Palabra de estado bit 15 = 1
1 02h falling_edge_visible Si falling_edge_occured = 1
� Palabra de estado bit 15 = 1
La activación del bit correspondiente en sample_control repone el bit de estado correspondiente en
sample_status y en caso de muestreo “Autolock” vuelve a desconectar el muestreo.
Sub-Index 04h
Description sample_controlData Type UINT8
Access wo
Mapping PDO yes
Units –
Value Range 0 … 1, � tabla
Default Value 0
Bit Valor Nombre Descripción
0 01h falling_edge_enable Muestreo en caso de flanco descendente
1 02h rising_edge_enable Muestreo en caso de flanco ascendente
Los siguientes objetos contienen las posiciones muestreadas.
Sub-Index 05h
Description sample_position_rising_edgeData Type INT32
Access ro
Mapping PDO yes
Units position units
Value Range –
Default Value –
Sub-Index 06h
Description sample_position_falling_edgeData Type INT32
Access ro
Mapping PDO yes
Units position units
Value Range –
Default Value –

5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 147
5.16 Control de frenado
Cuadro general
Con los siguientes objetos se puede parametrizar el modo en que el controlador de motor activa un
freno de retención eventualmente integrado en el motor. El freno de retención siempre se desconecta
en cuanto se conecta la habilitación del regulador. Para frenos de retención con elevada inercia
mecánica se puede parametrizar un tiempo de retardo para que el freno de retención esté engranado
antes de que se desconecte el paso de salida (descenso brusco de ejes verticales). El retardo se
parametriza mediante el objeto brake_delay_time. Como muestra el esquema, al conectar la ha
bilitación del regulador, el valor nominal de velocidad se habilita sólo después del brake_delay_time y
al desconectar la habilitación del regulador, la desconexión de la regulación se retrasa en dicho tiempo.
Desbloqueodel regulador
Freno de sostenimientoliberado
Valor de lista delnúmero de revoluciones
Habilitación internadel regulador
Valor nominal delnúmero de revoluciones
0
0
0
0
0
1
1
1
+
+
–
–
tFtF
tF: retardo de inicio del desplazamiento
Fig. 5.8 Función del retardo de frenado (regulación de velocidad / posicionamiento)
Descripción de los objetos
Index Objeto Nombre Tipo Attr.
6510h RECORD drive_data rw
Objeto 6510h_18h: brake_delay_timeMediante el objeto brake_delay_time se puede parametrizar el tiempo de retardo de frenado.
Index 6510h
Name drive_data
Object Code RECORD
No. of Elements 51

5 Ajustar parámetros
148 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Sub-Index 18h
Description brake_delay_time
Data Type UINT16
Access rw
Mapping PDO no
Units ms
Value Range 0 … 32000
Default Value 0
5.17 Información sobre el dispositivo
Index Objeto Nombre Tipo Attr.
1018h RECORD identity_object rw
6510h RECORD drive_data rw
Numerosos objetos CAN permiten leer diversas informaciones, tales como el tipo de controlador de
motor, el firmware utilizado, etc. desde el dispositivo.
Descripción de los objetos
Objeto 1018h: identity_objectEl controlador del motor se puede identificar de forma inequívoca en una red CANopen a través del
identity_object determinado en CiA 301. A tal fin se puede leer el código del fabricante (vendor_id), un
código inequívoco de producto (product_code), el número de revisión de la implementación CANopen
(revision_number) y el número de serie del equipo (serial_number).
Index 1018h
Name identity_object
Object Code RECORD
No. of Elements 4
Sub-Index 01h
Description vendor_idData Type UINT32
Access ro
Mapping PDO no
Units –
Value Range 0000001D
Default Value 0000001D
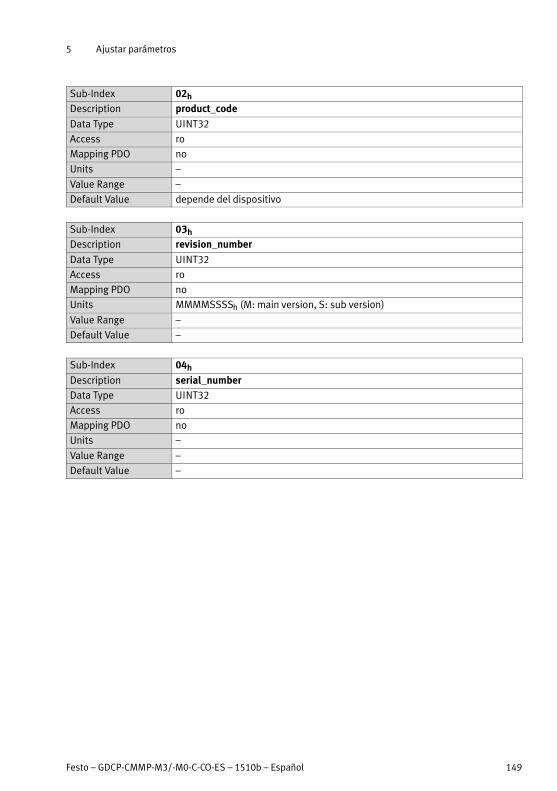
5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 149
Sub-Index 02h
Description product_code
Data Type UINT32
Access ro
Mapping PDO no
Units –
Value Range –
Default Value depende del dispositivo
Sub-Index 03h
Description revision_number
Data Type UINT32
Access ro
Mapping PDO no
Units MMMMSSSSh (M: main version, S: sub version)
Value Range –
Default Value –
Sub-Index 04h
Description serial_numberData Type UINT32
Access ro
Mapping PDO no
Units –
Value Range –
Default Value –
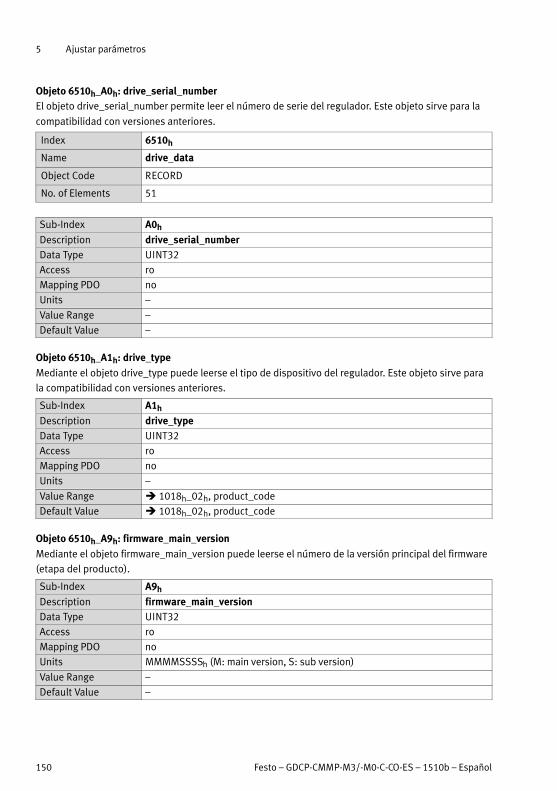
5 Ajustar parámetros
150 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Objeto 6510h_A0h: drive_serial_numberEl objeto drive_serial_number permite leer el número de serie del regulador. Este objeto sirve para la
compatibilidad con versiones anteriores.
Index 6510h
Name drive_data
Object Code RECORD
No. of Elements 51
Sub-Index A0h
Description drive_serial_numberData Type UINT32
Access ro
Mapping PDO no
Units –
Value Range –
Default Value –
Objeto 6510h_A1h: drive_type
Mediante el objeto drive_type puede leerse el tipo de dispositivo del regulador. Este objeto sirve para
la compatibilidad con versiones anteriores.
Sub-Index A1h
Description drive_typeData Type UINT32
Access ro
Mapping PDO no
Units –
Value Range � 1018h_02h, product_code
Default Value � 1018h_02h, product_code
Objeto 6510h_A9h: firmware_main_version
Mediante el objeto firmware_main_version puede leerse el número de la versión principal del firmware
(etapa del producto).
Sub-Index A9h
Description firmware_main_versionData Type UINT32
Access ro
Mapping PDO no
Units MMMMSSSSh (M: main version, S: sub version)
Value Range –
Default Value –

5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 151
Objeto 6510h_AAh: firmware_custom_versionMediante el objeto firmware_custom_version puede leerse el número de la versión del firmware de la
variante específica del cliente.
Sub-Index AAh
Description firmware_custom_version
Data Type UINT32
Access ro
Mapping PDO no
Units MMMMSSSSh (M: main version, S: sub version)
Value Range –
Default Value –
Objeto 6510h_ADh: km_releaseMediante el número de versión del km_release se pueden distinguir los estados del firmware de la
misma etapa del producto.
Sub-Index ADh
Description km_release
Data Type UINT32
Access ro
Mapping PDO no
Units –
Value Range MMMMSSSSh (M: main version, S: sub version)
Default Value –
Objeto 6510h_ACh: firmware_typeMediante el objeto firmware_type se puede leer para qué serie de dispositivos y para qué tipo de
transductor angular es adecuado el firmware cargado.
Sub-Index ACh
Description firmware_type
Data Type UINT32
Access ro
Mapping PDO no
Units –
Value Range 00000F2h
Default Value 00000F2h
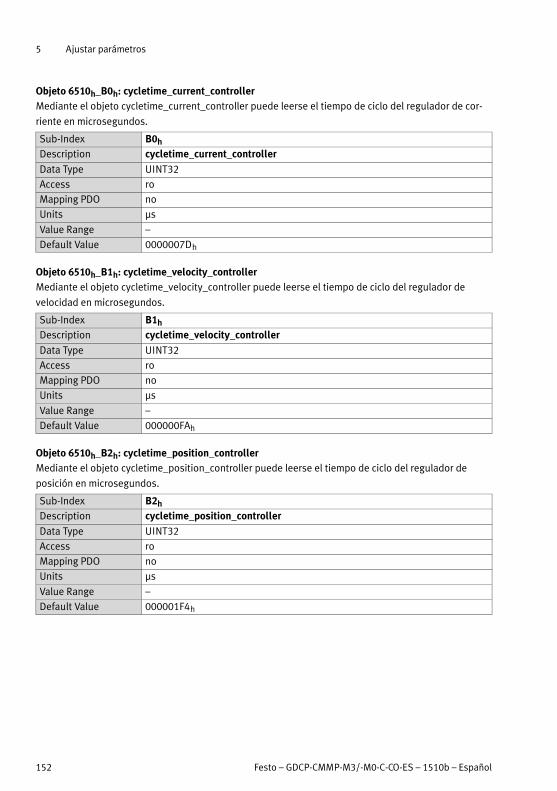
5 Ajustar parámetros
152 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Objeto 6510h_B0h: cycletime_current_controllerMediante el objeto cycletime_current_controller puede leerse el tiempo de ciclo del regulador de cor
riente en microsegundos.
Sub-Index B0h
Description cycletime_current_controller
Data Type UINT32
Access ro
Mapping PDO no
Units μs
Value Range –
Default Value 0000007Dh
Objeto 6510h_B1h: cycletime_velocity_controllerMediante el objeto cycletime_velocity_controller puede leerse el tiempo de ciclo del regulador de
velocidad en microsegundos.
Sub-Index B1h
Description cycletime_velocity_controller
Data Type UINT32
Access ro
Mapping PDO no
Units μs
Value Range –
Default Value 000000FAh
Objeto 6510h_B2h: cycletime_position_controllerMediante el objeto cycletime_position_controller puede leerse el tiempo de ciclo del regulador de
posición en microsegundos.
Sub-Index B2h
Description cycletime_position_controller
Data Type UINT32
Access ro
Mapping PDO no
Units μs
Value Range –
Default Value 000001F4h
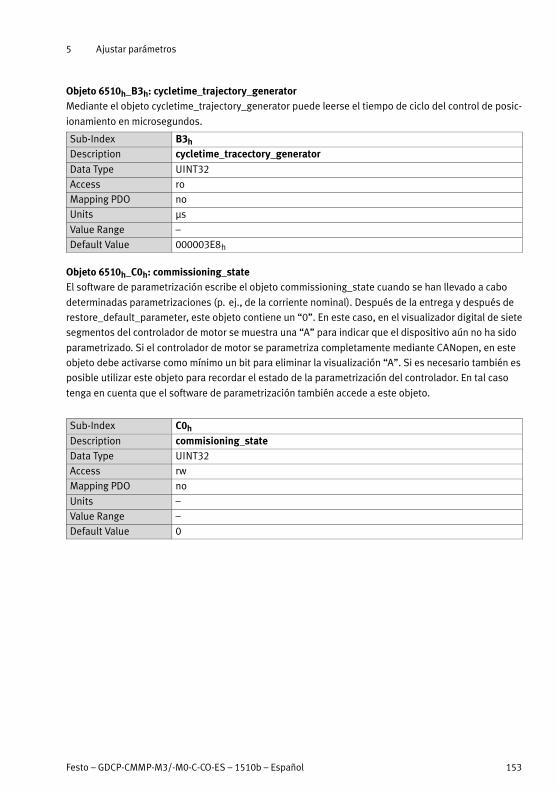
5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 153
Objeto 6510h_B3h: cycletime_trajectory_generatorMediante el objeto cycletime_trajectory_generator puede leerse el tiempo de ciclo del control de posic
ionamiento en microsegundos.
Sub-Index B3h
Description cycletime_tracectory_generator
Data Type UINT32
Access ro
Mapping PDO no
Units μs
Value Range –
Default Value 000003E8h
Objeto 6510h_C0h: commissioning_stateEl software de parametrización escribe el objeto commissioning_state cuando se han llevado a cabo
determinadas parametrizaciones (p. ej., de la corriente nominal). Después de la entrega y después de
restore_default_parameter, este objeto contiene un “0”. En este caso, en el visualizador digital de siete
segmentos del controlador de motor se muestra una “A” para indicar que el dispositivo aún no ha sido
parametrizado. Si el controlador de motor se parametriza completamente mediante CANopen, en este
objeto debe activarse como mínimo un bit para eliminar la visualización “A”. Si es necesario también es
posible utilizar este objeto para recordar el estado de la parametrización del controlador. En tal caso
tenga en cuenta que el software de parametrización también accede a este objeto.
Sub-Index C0h
Description commisioning_stateData Type UINT32
Access rw
Mapping PDO no
Units –
Value Range –
Default Value 0

5 Ajustar parámetros
154 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Valor Significado
0 Corriente nominal válida
1 Corriente máxima válida
2 Número válido de polos del motor
3 Ángulo offset / sentido de giro válido
4 Reservado
5 Ángulo offset / sentido de giro sensor Hall válido
6 Reservado
7 Posición absoluta sistema transmisor válido
8 Parámetros de regulador de corriente válidos
9 Reservado
10 Unidades físicas válidas
11 Regulador de velocidad válido
12 Regulador de posición válido
13 Parámetro de seguridad válido
14 Reservado
15 Polaridad de limitador de carrera válida
16 … 31 Reservado
AtenciónEste objeto no contiene ningún tipo de información sobre si el controlador de motor ha
sido parametrizado de forma correcta y correspondiente al motor y a la aplicación, sino
únicamente si los puntos mencionados tras la entrega se han parametrizado como
mínimo una vez.
“A” en el visualizador digital de siete segmentosTenga en cuenta que en el objeto commissioning_state se debe activar como mínimo un
bit para eliminar la “A” del visualizador digital de siete segmentos.
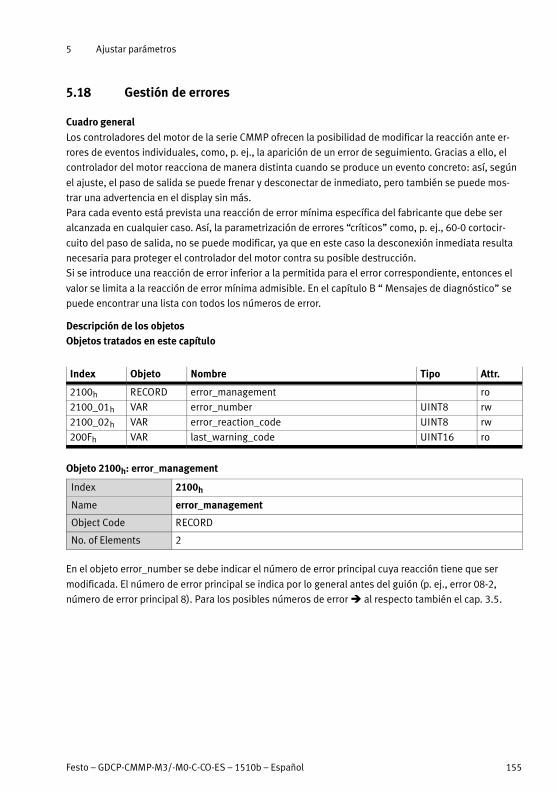
5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 155
5.18 Gestión de errores
Cuadro general
Los controladores del motor de la serie CMMP ofrecen la posibilidad de modificar la reacción ante er
rores de eventos individuales, como, p. ej., la aparición de un error de seguimiento. Gracias a ello, el
controlador del motor reacciona de manera distinta cuando se produce un evento concreto: así, según
el ajuste, el paso de salida se puede frenar y desconectar de inmediato, pero también se puede mos
trar una advertencia en el display sin más.
Para cada evento está prevista una reacción de error mínima específica del fabricante que debe ser
alcanzada en cualquier caso. Así, la parametrización de errores “críticos” como, p. ej., 60-0 cortocir
cuito del paso de salida, no se puede modificar, ya que en este caso la desconexión inmediata resulta
necesaria para proteger el controlador del motor contra su posible destrucción.
Si se introduce una reacción de error inferior a la permitida para el error correspondiente, entonces el
valor se limita a la reacción de error mínima admisible. En el capítulo B “ Mensajes de diagnóstico” se
puede encontrar una lista con todos los números de error.
Descripción de los objetosObjetos tratados en este capítulo
Index Objeto Nombre Tipo Attr.
2100h RECORD error_management ro
2100_01h VAR error_number UINT8 rw
2100_02h VAR error_reaction_code UINT8 rw
200Fh VAR last_warning_code UINT16 ro
Objeto 2100h: error_management
Index 2100h
Name error_management
Object Code RECORD
No. of Elements 2
En el objeto error_number se debe indicar el número de error principal cuya reacción tiene que ser
modificada. El número de error principal se indica por lo general antes del guión (p. ej., error 08-2,
número de error principal 8). Para los posibles números de error � al respecto también el cap. 3.5.

5 Ajustar parámetros
156 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Sub-Index 01h
Description error_number
Data Type UINT8
Access rw
Mapping PDO no
Units –
Value Range 1 … 96
Default Value 1
En el objeto error_reaction_code se puede modificar la reacción del error. Si no se alcanza la reacción
mínima del fabricante, se limitará a ésta. La reacción ajustada realmente se puede determinar median
te una lectura de retorno.
Sub-Index 02h
Description error_reaction_code
Data Type UINT8
Access rw
Mapping PDO no
Units –
Value Range 0, 1, 3, 5, 7, 8
Default Value depende de error_number
Valor Significado
0 Ninguna acción
1 Entrada en memoria intermedia
3 Advertencia en el visualizador digital de siete segmentos y en la palabra de estado
5 Habilitación de regulador desconectada
7 Frenar con corriente máxima
8 Paso de salida desconectado

5 Ajustar parámetros
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 157
Objeto 200Fh: last_warning_codeLas advertencias son eventos especiales del accionamiento (p. ej., un error de seguimiento) que, a
diferencia de los errores, no deben ocasionar un paro del accionamiento. Las advertencias se visualizan
en el visualizador digital de siete segmentos del regulador y después el regulador las desactiva auto
máticamente.
La última advertencia aparecida se puede leer mediante el objeto siguiente. El bit 15 indica si la adver
tencia aún sigue activa en este momento.
Index 200Fh
Name last_warning_code
Object Code VAR
Data Type UINT16
Access ro
Mapping PDO yes
Units –
Value Range –
Default Value –
Bit Valor Significado
0 … 3 000Fh Número secundario de la advertencia
4 … 11 0FF0h Número principal de la advertencia
15 8000h Advertencia activa
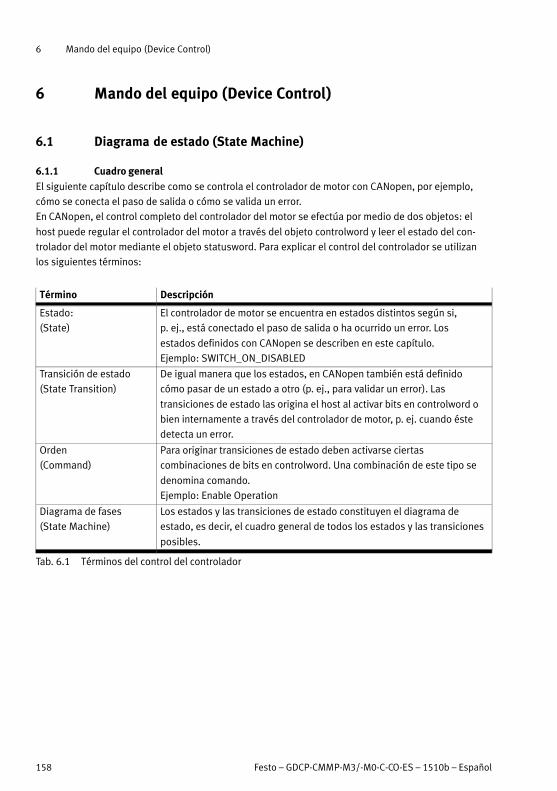
6 Mando del equipo (Device Control)
158 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
6 Mando del equipo (Device Control)
6.1 Diagrama de estado (State Machine)
6.1.1 Cuadro general
El siguiente capítulo describe como se controla el controlador de motor con CANopen, por ejemplo,
cómo se conecta el paso de salida o cómo se valida un error.
En CANopen, el control completo del controlador del motor se efectúa por medio de dos objetos: el
host puede regular el controlador del motor a través del objeto controlword y leer el estado del con
trolador del motor mediante el objeto statusword. Para explicar el control del controlador se utilizan
los siguientes términos:
Término Descripción
Estado:
(State)
El controlador de motor se encuentra en estados distintos según si,
p. ej., está conectado el paso de salida o ha ocurrido un error. Los
estados definidos con CANopen se describen en este capítulo.
Ejemplo: SWITCH_ON_DISABLED
Transición de estado
(State Transition)
De igual manera que los estados, en CANopen también está definido
cómo pasar de un estado a otro (p. ej., para validar un error). Las
transiciones de estado las origina el host al activar bits en controlword o
bien internamente a través del controlador de motor, p. ej. cuando éste
detecta un error.
Orden
(Command)
Para originar transiciones de estado deben activarse ciertas
combinaciones de bits en controlword. Una combinación de este tipo se
denomina comando.
Ejemplo: Enable Operation
Diagrama de fases
(State Machine)
Los estados y las transiciones de estado constituyen el diagrama de
estado, es decir, el cuadro general de todos los estados y las transiciones
posibles.
Tab. 6.1 Términos del control del controlador

6 Mando del equipo (Device Control)
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 159
6.1.2 El diagrama de estado del controlador de motor (State Machine)
SWITCH_ON_DISABLED
READY_TO_SWITCH_ON
FAULT_REACTION_ACTIVE
FAULT
SWITCH_ON
OPERATION_ENABLE QUICK_STOP_ACTIVE
NOT_READY_TO_SWITCH_ON
1
00
2 7
aJ
3 689
aC
aD
aE
aB
aA
Power enabled (pasode salida conectado)
Fault(error)
Power disabled (paso desalida desconectado)
4 5
Fig. 6.1 Diagrama de estado del controlador de motor
A grandes rasgos, el diagrama de fases se puede dividir en tres áreas: “Power Disabled” significa que
el paso de salida está desconectado y “Power Enabled” que la unidad de salida está conectada. En el
área “Fault” están resumidos los estados necesarios para el tratamiento de errores.
Los estados más importantes del controlador de motor están marcados en color más oscuro en el diag
rama. Después de la conexión, el controlador de motor se inicializa y alcanza finalmente el estado

6 Mando del equipo (Device Control)
160 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
SWITCH_ON_DISABLED. En este estado la comunicación CAN es completamente operativa y el con
trolador del motor puede ser parametrizado (p. ej., se puede ajustar el modo de funcionamiento
“Regulación de la velocidad”). El paso de salida está desconectado y por lo tanto el eje puede girar
libremente. A través de las transiciones de estado 2, 3, 4, lo que en principio equivale a la ha
bilitación del regulador CAN, se llega al estado OPERATION_ENABLE. En este estado el paso de salida
está conectado y el motor se regula según el modo de funcionamiento ajustado. Por este motivo es
imprescindible asegurarse previamente de que el accionamiento está bien parametrizado y de que un
valor nominal correspondiente es igual a cero.
La transición de estado 9 equivale a la desconexión de la habilitación, es decir, un motor que aún esté
en funcionamiento se detendrá lentamente de manera no regulada.
Cuando aparece un error, se salta al estado FAULT (desde cualquier estado). Según la gravedad del
error se pueden ejecutar previamente ciertas acciones, como, p. ej., un frenado de emergencia
(FAULT_REACTION_ACTIVE).
Para ejecutar las transiciones de estado mencionadas deben activarse ciertas combinaciones de bits
en controlword (ver abajo). Los 4 bits inferiores de controlwords se evalúan conjuntamente para
originar una transición de estado.
A continuación se describen únicamente las transiciones de estado más importantes 2, 3, 4, 9 y
aE. Hallará una tabla con todos los estados y transiciones de estado posibles al final de este capítulo.
La tabla siguiente contiene en la primera columna la transición de estado deseada y en la segunda los
requerimientos que se deben cumplir para ésta (en general una orden del host, que se indica aquí con
un marco). En la tercera columna se puede ver cómo se genera esta orden, es decir, qué bits se deben
activar en controlword (x = irrelevante).
N.° Se ejecuta cuando Combinación de bits (controlword) AcciónBit 3 2 1 0
2
Primero habilit. regulador y
paso de salida + comando
Shutdown
Shutdown = x 1 1 0 Ninguna
3 Comando Switch On Switch On = x 1 1 1Conexión del paso de
salida
4 Comando Enable Operation Enable Operation = 1 1 1 1
Regulación según el
modo de funcionam
iento ajustado
9 Comando Disable Voltage Disable Voltage = x x 0 x
Se bloquea el paso de
salida.
El motor puede girar
libremente.
aEError eliminado + comando
Fault ResetFault Reset =
Bit 7 =
0 � 1Confirmación de error
Tab. 6.2 Transiciones de estado más importantes del controlador de motor

6 Mando del equipo (Device Control)
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 161
EJEMPLODespués de parametrizar el controlador del motor, éste debe “habilitarse”, es decir, el paso de salida
y la regulación se deben conectar:
1. El controlador de motor se encuentra en el estado SWITCH_ON_DISABLED
2. El controlador de motor debe pasar al estado OPERATION_ENABLE
3. Según el diagrama de fases (Fig. 6.1) se deben ejecutar las transiciones 2, 3 y 4.
4. De la Tab. 6.2 resulta:
Transición 2: controlword = 0006h
Estado nuevo: READY_TO_SWITCH_ON1)
Transición 3: controlword = 0007h
Estado nuevo: SWITCHED_ON1)
Transición 4: controlword = 000Fh
Estado nuevo: OPERATION_ENABLE1)
Advertencia:
1. En el ejemplo se presupone que no hay ningún otro bit activado en controlword (para las transic
iones únicamente resultan importantes los bits 0 … 3).
2. Las transiciones 3 y 4 se pueden unir poniendo controlword a 000Fh. Para la transición de es
tado 2 es irrelevante si el bit 3 está activado.
1) El host debe esperar hasta que el estado se pueda leer en statusword. Esto se describe detalladamente más abajo.
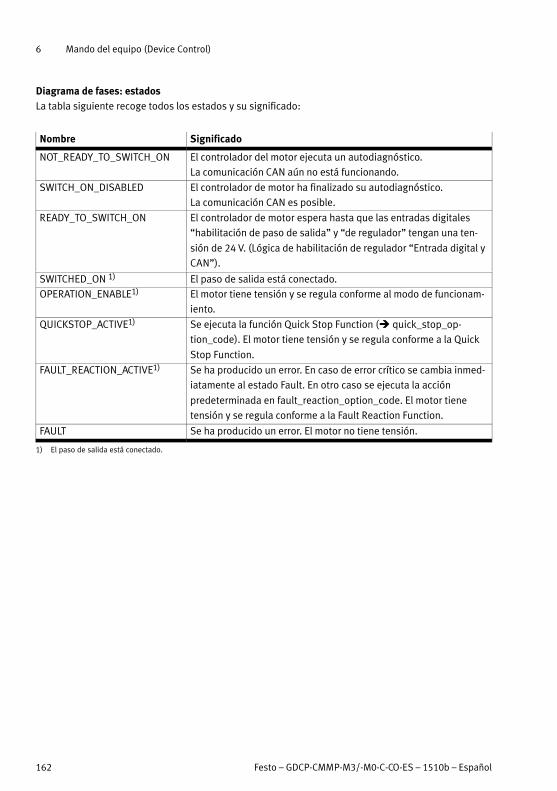
6 Mando del equipo (Device Control)
162 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Diagrama de fases: estadosLa tabla siguiente recoge todos los estados y su significado:
Nombre Significado
NOT_READY_TO_SWITCH_ON El controlador del motor ejecuta un autodiagnóstico.
La comunicación CAN aún no está funcionando.
SWITCH_ON_DISABLED El controlador de motor ha finalizado su autodiagnóstico.
La comunicación CAN es posible.
READY_TO_SWITCH_ON El controlador de motor espera hasta que las entradas digitales
“habilitación de paso de salida” y “de regulador” tengan una ten
sión de 24 V. (Lógica de habilitación de regulador “Entrada digital y
CAN”).
SWITCHED_ON 1) El paso de salida está conectado.
OPERATION_ENABLE1) El motor tiene tensión y se regula conforme al modo de funcionam
iento.
QUICKSTOP_ACTIVE1) Se ejecuta la función Quick Stop Function (� quick_stop_op
tion_code). El motor tiene tensión y se regula conforme a la Quick
Stop Function.
FAULT_REACTION_ACTIVE1) Se ha producido un error. En caso de error crítico se cambia inmed
iatamente al estado Fault. En otro caso se ejecuta la acción
predeterminada en fault_reaction_option_code. El motor tiene
tensión y se regula conforme a la Fault Reaction Function.
FAULT Se ha producido un error. El motor no tiene tensión.
1) El paso de salida está conectado.
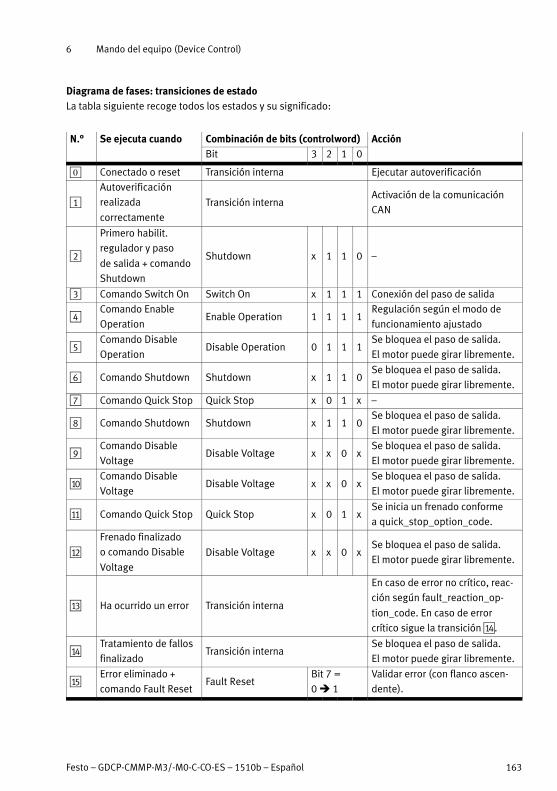
6 Mando del equipo (Device Control)
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 163
Diagrama de fases: transiciones de estadoLa tabla siguiente recoge todos los estados y su significado:
N.° Se ejecuta cuando Combinación de bits (controlword) AcciónBit 3 2 1 0
00 Conectado o reset Transición interna Ejecutar autoverificación
1
Autoverificación
realizada
correctamente
Transición internaActivación de la comunicación
CAN
2
Primero habilit.
regulador y paso
de salida + comando
Shutdown
Shutdown x 1 1 0 –
3 Comando Switch On Switch On x 1 1 1 Conexión del paso de salida
4Comando Enable
OperationEnable Operation 1 1 1 1
Regulación según el modo de
funcionamiento ajustado
5Comando Disable
OperationDisable Operation 0 1 1 1
Se bloquea el paso de salida.
El motor puede girar libremente.
6 Comando Shutdown Shutdown x 1 1 0Se bloquea el paso de salida.
El motor puede girar libremente.
7 Comando Quick Stop Quick Stop x 0 1 x –
8 Comando Shutdown Shutdown x 1 1 0Se bloquea el paso de salida.
El motor puede girar libremente.
9Comando Disable
VoltageDisable Voltage x x 0 x
Se bloquea el paso de salida.
El motor puede girar libremente.
aJComando Disable
VoltageDisable Voltage x x 0 x
Se bloquea el paso de salida.
El motor puede girar libremente.
aA Comando Quick Stop Quick Stop x 0 1 xSe inicia un frenado conforme
a quick_stop_option_code.
aB
Frenado finalizado
o comando Disable
Voltage
Disable Voltage x x 0 xSe bloquea el paso de salida.
El motor puede girar libremente.
aC Ha ocurrido un error Transición interna
En caso de error no crítico, reac
ción según fault_reaction_op
tion_code. En caso de error
crítico sigue la transición aD.
aDTratamiento de fallos
finalizadoTransición interna
Se bloquea el paso de salida.
El motor puede girar libremente.
aEError eliminado +
comando Fault ResetFault Reset
Bit 7 =
0 � 1
Validar error (con flanco ascen
dente).

6 Mando del equipo (Device Control)
164 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
AtenciónPaso de salida bloqueado …
… significa que los semiconductores de potencia (transistores) ya no se activan. Cuando
se adopta este estado con un motor que está girando, éste se detiene lentamente sin
freno. Si existe un freno mecánico de motor se activará automáticamente.
La señal no garantiza que el motor realmente no tenga tensión.
AtenciónPaso de salida habilitado …
… significa que el motor se activa y regula conforme al modo de funcionamiento selec
cionado. Si existe un freno mecánico de motor, se activa automáticamente. En caso de
defecto o parametrización errónea (corriente de motor, cantidad de contactos, ángulo
offset de resolver, etc.) puede ocasionarse un comportamiento descontrolado del ac
cionamiento.
6.1.3 Palabra de control (Controlword)
Objeto 6040h: controlwordMediante el controlword se puede modificar el estado actual del controlador del motor o bien iniciar
directamente una acción determinada (p. ej., inicio del recorrido de referencia). La función de los bits 4,
5, 6 y 8 depende del modo actual de funcionamiento (modes_of_operation) del controlador de motor,
que se describe después de este capítulo.
Index 6040h
Name controlword
Object Code VAR
Data Type UINT16
Access rw
Mapping PDO yes
Units –
Value Range –
Default Value 0
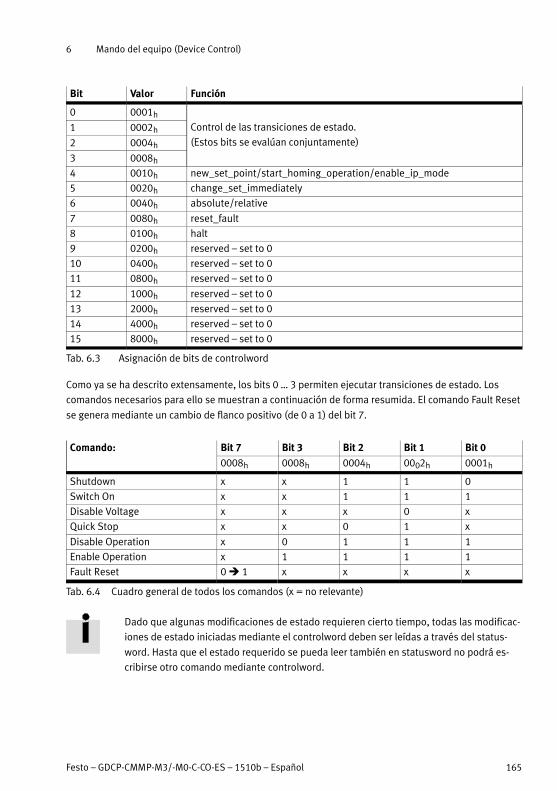
6 Mando del equipo (Device Control)
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 165
Bit Valor Función
0 0001h
Control de las transiciones de estado.
(Estos bits se evalúan conjuntamente)1 0002h
2 0004h
3 0008h
4 0010h new_set_point/start_homing_operation/enable_ip_mode
5 0020h change_set_immediately
6 0040h absolute/relative
7 0080h reset_fault
8 0100h halt
9 0200h reserved – set to 0
10 0400h reserved – set to 0
11 0800h reserved – set to 0
12 1000h reserved – set to 0
13 2000h reserved – set to 0
14 4000h reserved – set to 0
15 8000h reserved – set to 0
Tab. 6.3 Asignación de bits de controlword
Como ya se ha descrito extensamente, los bits 0 … 3 permiten ejecutar transiciones de estado. Los
comandos necesarios para ello se muestran a continuación de forma resumida. El comando Fault Reset
se genera mediante un cambio de flanco positivo (de 0 a 1) del bit 7.
Comando: Bit 7 Bit 3 Bit 2 Bit 1 Bit 0
0008h 0008h 0004h 0002h 0001h
Shutdown x x 1 1 0
Switch On x x 1 1 1
Disable Voltage x x x 0 x
Quick Stop x x 0 1 x
Disable Operation x 0 1 1 1
Enable Operation x 1 1 1 1
Fault Reset 0 � 1 x x x x
Tab. 6.4 Cuadro general de todos los comandos (x = no relevante)
Dado que algunas modificaciones de estado requieren cierto tiempo, todas las modificac
iones de estado iniciadas mediante el controlword deben ser leídas a través del status
word. Hasta que el estado requerido se pueda leer también en statusword no podrá es
cribirse otro comando mediante controlword.
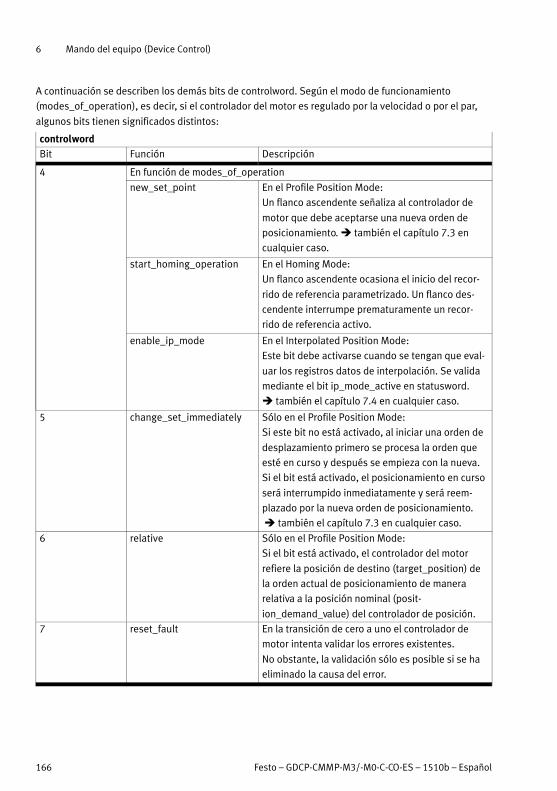
6 Mando del equipo (Device Control)
166 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
A continuación se describen los demás bits de controlword. Según el modo de funcionamiento
(modes_of_operation), es decir, si el controlador del motor es regulado por la velocidad o por el par,
algunos bits tienen significados distintos:
controlwordBit Función Descripción
4 En función de modes_of_operation
new_set_point En el Profile Position Mode:
Un flanco ascendente señaliza al controlador de
motor que debe aceptarse una nueva orden de
posicionamiento. � también el capítulo 7.3 en
cualquier caso.
start_homing_operation En el Homing Mode:
Un flanco ascendente ocasiona el inicio del recor
rido de referencia parametrizado. Un flanco des
cendente interrumpe prematuramente un recor
rido de referencia activo.
enable_ip_mode En el Interpolated Position Mode:
Este bit debe activarse cuando se tengan que eval
uar los registros datos de interpolación. Se valida
mediante el bit ip_mode_active en statusword.
� también el capítulo 7.4 en cualquier caso.
5 change_set_immediately Sólo en el Profile Position Mode:
Si este bit no está activado, al iniciar una orden de
desplazamiento primero se procesa la orden que
esté en curso y después se empieza con la nueva.
Si el bit está activado, el posicionamiento en curso
será interrumpido inmediatamente y será reem
plazado por la nueva orden de posicionamiento.
� también el capítulo 7.3 en cualquier caso.
6 relative Sólo en el Profile Position Mode:
Si el bit está activado, el controlador del motor
refiere la posición de destino (target_position) de
la orden actual de posicionamiento de manera
relativa a la posición nominal (posit
ion_demand_value) del controlador de posición.
7 reset_fault En la transición de cero a uno el controlador de
motor intenta validar los errores existentes.
No obstante, la validación sólo es posible si se ha
eliminado la causa del error.

6 Mando del equipo (Device Control)
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 167
controlword
Bit DescripciónFunción
8 halt En el Profile Position Mode:
Cuando el bit está activado se interrumpe el posic
ionamiento en curso. Se frena con
profile_deceleration. Una vez finalizado el
proceso, el bit target_reached de statusword se
activa. El borrado del bit no causa ningún efecto.
En el Profile Velocity Mode:
Cuando el bit está activado la velocidad desciende
a cero. Se frena con profile_deceleration. Al borrar
el bit el controlador de motor vuelve a acelerarse.
En el Profile Torque Mode:
Cuando el bit está activado el par desciende
a cero. Esto sucede mediante el torque_slope.
Al borrar el bit el controlador de motor vuelve
a acelerarse.
En el Homing Mode:
Cuando el bit está activado se interrumpe el
recorrido de referencia. El borrado del bit no causa
ningún efecto.
Tab. 6.5 controlword bit 4 … 8
6.1.4 Lectura del estado del controlador de motorAsí como a través de la combinación de varios bits del controlword se pueden iniciar diferentes
transiciones de estado, mediante la combinación de distintos bits del statusword puede leerse en qué
estado se encuentra el controlador de motor.
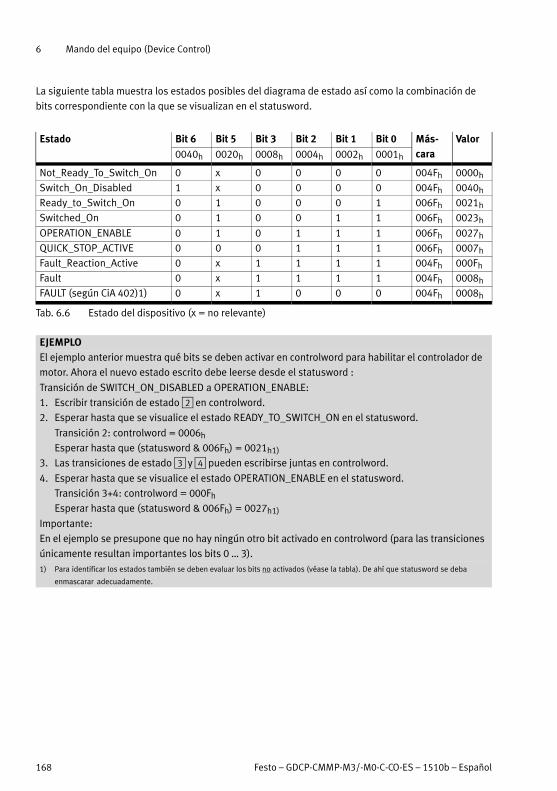
6 Mando del equipo (Device Control)
168 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
La siguiente tabla muestra los estados posibles del diagrama de estado así como la combinación de
bits correspondiente con la que se visualizan en el statusword.
Estado Bit 6 Bit 5 Bit 3 Bit 2 Bit 1 Bit 0 Máscara
Valor
0040h 0020h 0008h 0004h 0002h 0001h
Not_Ready_To_Switch_On 0 x 0 0 0 0 004Fh 0000h
Switch_On_Disabled 1 x 0 0 0 0 004Fh 0040h
Ready_to_Switch_On 0 1 0 0 0 1 006Fh 0021h
Switched_On 0 1 0 0 1 1 006Fh 0023h
OPERATION_ENABLE 0 1 0 1 1 1 006Fh 0027h
QUICK_STOP_ACTIVE 0 0 0 1 1 1 006Fh 0007h
Fault_Reaction_Active 0 x 1 1 1 1 004Fh 000Fh
Fault 0 x 1 1 1 1 004Fh 0008h
FAULT (según CiA 402)1) 0 x 1 0 0 0 004Fh 0008h
Tab. 6.6 Estado del dispositivo (x = no relevante)
EJEMPLOEl ejemplo anterior muestra qué bits se deben activar en controlword para habilitar el controlador de
motor. Ahora el nuevo estado escrito debe leerse desde el statusword :
Transición de SWITCH_ON_DISABLED a OPERATION_ENABLE:
1. Escribir transición de estado 2 en controlword.
2. Esperar hasta que se visualice el estado READY_TO_SWITCH_ON en el statusword.
Transición 2: controlword = 0006h
Esperar hasta que (statusword & 006Fh) = 0021h1)
3. Las transiciones de estado 3 y 4 pueden escribirse juntas en controlword.
4. Esperar hasta que se visualice el estado OPERATION_ENABLE en el statusword.
Transición 3+4: controlword = 000Fh
Esperar hasta que (statusword & 006Fh) = 0027h1)
Importante:
En el ejemplo se presupone que no hay ningún otro bit activado en controlword (para las transiciones
únicamente resultan importantes los bits 0 … 3).1) Para identificar los estados también se deben evaluar los bits no activados (véase la tabla). De ahí que statusword se deba
enmascarar adecuadamente.

6 Mando del equipo (Device Control)
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 169
6.1.5 Palabras de estado (Statuswords)
Objeto 6041h: statusword
Index 6041h
Name statusword
Object Code VAR
Data Type UINT16
Access ro
Mapping PDO yes
Units –
Value Range –
Default Value –
Bit Valor Función
0 0001h
Estado del controlador del motor (� Tab. 6.6).
(Estos bits se deben evaluar conjuntamente).1 0002h
2 0004h
3 0008h
4 0010h voltage_enabled
5 0020h Estado del controlador del motor (� Tab. 6.6).6 0040h
7 0080h warning
8 0100h drive_is_moving
9 0200h remote
10 0400h target_reached
11 0800h internal_limit_active
12 1000h set_point_acknowledge/speed_0/homing_attained/ip_mode_active
13 2000h following_error/homing_error
14 4000h manufacturer_statusbit
15 8000h Accto. referenciado
Tab. 6.7 Asignación de bits en el statusword
Todos los bits del statusword son bits que no están almacenados en la memoria inter
media. Representan el estado actual del dispositivo.
Además del estado del controlador del motor, en statusword se visualizan diversos eventos; cada bit
tiene asignado un evento determinado, p. ej., error de seguimiento. Significado de cada uno de los bits:
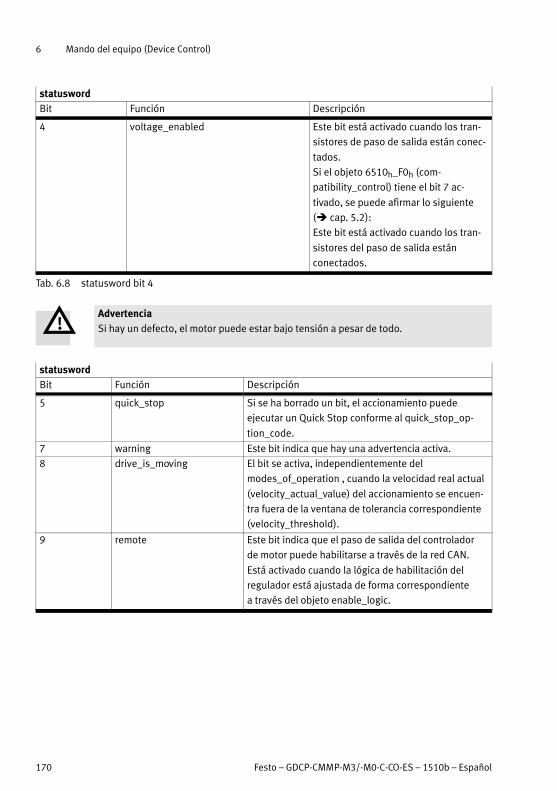
6 Mando del equipo (Device Control)
170 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
statuswordBit Función Descripción
4 voltage_enabled Este bit está activado cuando los tran
sistores de paso de salida están conec
tados.
Si el objeto 6510h_F0h (com
patibility_control) tiene el bit 7 ac
tivado, se puede afirmar lo siguiente
(� cap. 5.2):
Este bit está activado cuando los tran
sistores del paso de salida están
conectados.
Tab. 6.8 statusword bit 4
AdvertenciaSi hay un defecto, el motor puede estar bajo tensión a pesar de todo.
statuswordBit Función Descripción
5 quick_stop Si se ha borrado un bit, el accionamiento puede
ejecutar un Quick Stop conforme al quick_stop_op
tion_code.
7 warning Este bit indica que hay una advertencia activa.
8 drive_is_moving El bit se activa, independientemente del
modes_of_operation , cuando la velocidad real actual
(velocity_actual_value) del accionamiento se encuen
tra fuera de la ventana de tolerancia correspondiente
(velocity_threshold).
9 remote Este bit indica que el paso de salida del controlador
de motor puede habilitarse a través de la red CAN.
Está activado cuando la lógica de habilitación del
regulador está ajustada de forma correspondiente
a través del objeto enable_logic.
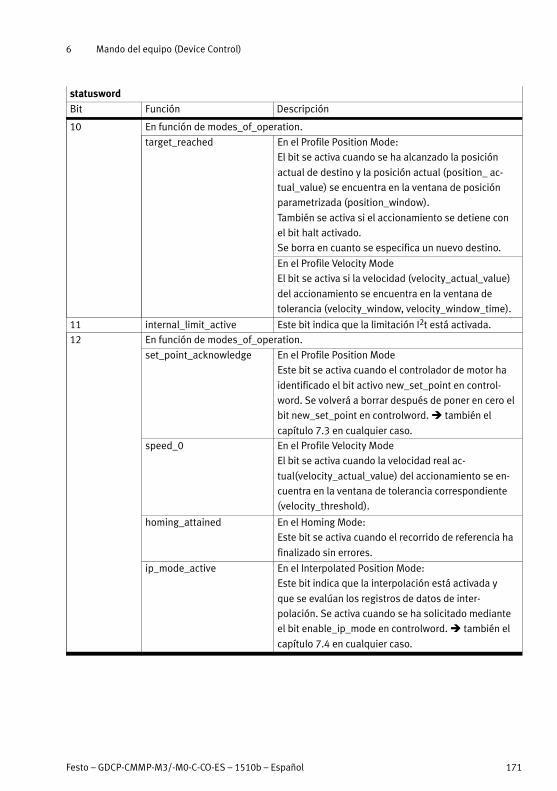
6 Mando del equipo (Device Control)
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 171
statusword
Bit DescripciónFunción
10 En función de modes_of_operation.
target_reached En el Profile Position Mode:
El bit se activa cuando se ha alcanzado la posición
actual de destino y la posición actual (position_ ac
tual_value) se encuentra en la ventana de posición
parametrizada (position_window).
También se activa si el accionamiento se detiene con
el bit halt activado.
Se borra en cuanto se especifica un nuevo destino.
En el Profile Velocity Mode
El bit se activa si la velocidad (velocity_actual_value)
del accionamiento se encuentra en la ventana de
tolerancia (velocity_window, velocity_window_time).
11 internal_limit_active Este bit indica que la limitación I2t está activada.
12 En función de modes_of_operation.
set_point_acknowledge En el Profile Position Mode
Este bit se activa cuando el controlador de motor ha
identificado el bit activo new_set_point en control
word. Se volverá a borrar después de poner en cero el
bit new_set_point en controlword. � también el
capítulo 7.3 en cualquier caso.
speed_0 En el Profile Velocity Mode
El bit se activa cuando la velocidad real ac
tual(velocity_actual_value) del accionamiento se en
cuentra en la ventana de tolerancia correspondiente
(velocity_threshold).
homing_attained En el Homing Mode:
Este bit se activa cuando el recorrido de referencia ha
finalizado sin errores.
ip_mode_active En el Interpolated Position Mode:
Este bit indica que la interpolación está activada y
que se evalúan los registros de datos de inter
polación. Se activa cuando se ha solicitado mediante
el bit enable_ip_mode en controlword. � también el
capítulo 7.4 en cualquier caso.
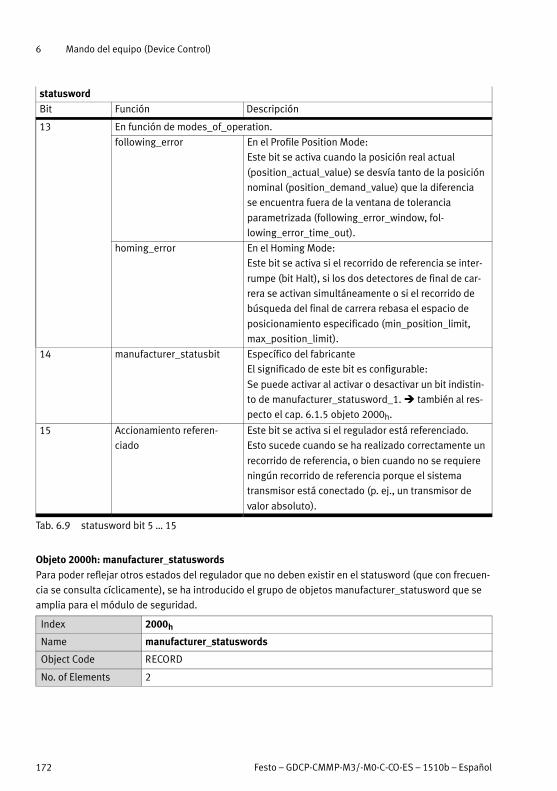
6 Mando del equipo (Device Control)
172 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
statusword
Bit DescripciónFunción
13 En función de modes_of_operation.
following_error En el Profile Position Mode:
Este bit se activa cuando la posición real actual
(position_actual_value) se desvía tanto de la posición
nominal (position_demand_value) que la diferencia
se encuentra fuera de la ventana de tolerancia
parametrizada (following_error_window, fol
lowing_error_time_out).
homing_error En el Homing Mode:
Este bit se activa si el recorrido de referencia se inter
rumpe (bit Halt), si los dos detectores de final de car
rera se activan simultáneamente o si el recorrido de
búsqueda del final de carrera rebasa el espacio de
posicionamiento especificado (min_position_limit,
max_position_limit).
14 manufacturer_statusbit Específico del fabricante
El significado de este bit es configurable:
Se puede activar al activar o desactivar un bit indistin
to de manufacturer_statusword_1. � también al res
pecto el cap. 6.1.5 objeto 2000h.
15 Accionamiento referen
ciado
Este bit se activa si el regulador está referenciado.
Esto sucede cuando se ha realizado correctamente un
recorrido de referencia, o bien cuando no se requiere
ningún recorrido de referencia porque el sistema
transmisor está conectado (p. ej., un transmisor de
valor absoluto).
Tab. 6.9 statusword bit 5 … 15
Objeto 2000h: manufacturer_statuswords
Para poder reflejar otros estados del regulador que no deben existir en el statusword (que con frecuen
cia se consulta cíclicamente), se ha introducido el grupo de objetos manufacturer_statusword que se
amplia para el módulo de seguridad.
Index 2000h
Name manufacturer_statuswords
Object Code RECORD
No. of Elements 2

6 Mando del equipo (Device Control)
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 173
Sub-Index 00h
Description manufacturer_statuswords
Data Type UINT8
Access ro
PDO Mapping no
Units –
Value Range –
Default Value 1
Sub-Index 01h
Description manufacturer_statusword_1
Data Type UINT32
Access ro
PDO Mapping yes
Units –
Value Range –
Default Value –
manufacturer_statusword_1
Bit Señal Descripción
Bit 0 IS_REFERENCED El actuador está referenciado
Bit 1 COMMUTATION_
VALID
La conmutación es válida
Bit 2 READY_FOR_ENABLE Este bit se activa cuando se dan todas las condiciones para
habilitar el regulador y sólo falta la habilitación del regulador.
Deben cumplirse las siguientes condiciones:
– No hay errores en el accionamiento.
– El circuito intermedio está cargado.
– La evaluación del transductor angular está lista. No hay
procesos activos (p. ej. transmisión serial) que eviten una
habilitación.
– No hay ningún proceso de bloqueo activo (p. ej. la identifi
cación automática de parámeteros del motor).
– STO no está activo o alguna función de seguridad que per
mita la habilitación está activa.Bit 3 IPO_IN_TARGET En generador de posición ha cerrado el perfil.
Bit 4 ... 7 CAM Reservado y usado para el disco de leva.
Bit 8 SAFE_STANDSTILL “Pausa segura” en el indicador de 7 segmentos.
Uso a través del módulo de seguridad CAMC-G-S1.
Bit 9 ... 11 – Reservado para ampliaciones.

6 Mando del equipo (Device Control)
174 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
manufacturer_statusword_1
Bit DescripciónSeñal
Bit 12 VOUT_PS_EN Muestra que el actuador se puede poner en marcha (no hay
limitaciones por el módulo de seguridad).
Bit 13 VOUT_WARN Recoge VOUT_WARN (VOUT 41) del módulo de seguridad.
Hay por lo menos un fallo cuya reacción de fallo está parame
trada en “advertencia”.
Bit 14 VOUT_SCV Recoge VOUT_SCV (VOUT 42) del módulo de seguridad.
Se ha vulnerado como mínimo una condición de seguridad.
Bit 15 VOUT_ERROR Recoge VOUT_ERROR (VOUT 43) del módulo de seguridad.
Se ha detectado un fallo interno.
Bit 16 VOUT_SAVE_STAT Recoge VOUT_SSR (VOUT 44) del módulo de seguridad.
El bit se activa cuando se solicita una función de seguridad y se
alcanza el estado seguro.
Bit 17 VOUT_SFR Recoge VOUT_SFR (VOUT 45) del módulo de seguridad.
El bit se activa cuando se solicita al menos una función de segu
ridad. El bit permanece activo hasta que se reinician todos los
requerimientos.
Bit 18 VOUT_SERVICE No hay parámetros disponibles, parámetro no válido o hay una
sesión de parametrización en proceso (no se apoya en CAMC-
G-S1). Se ocupa el estado cuando el módulo de seguridad se
cambia por otro tipo.
Bit 19 VOUT_READY Estado normal: VOUT_READY= NOT (VOUT_SFR)
Bit 20 ... 31 – Reservado.
Tab. 6.10 Asignación de bits manufacturer_statusword_1
Con los objetos manufacturer_status_masks y manufacturer_status_invert se pueden visualizar uno o
varios bits de manufacturer_statuswords en el bit 14 (manufacturer_statusbit) de statusword (6041h).
Todos los bits de manufacturer_statusword_1 se pueden invertir mediante el bit correspondiente en
manufacturer_status_invert_1. Así también se pueden supervisar bits en el estado “repuesto”. Des
pués de la inversión los bits se enmascaran, es decir, únicamente se evalúan si su bit correspondiente
de manufacturer_status_mask_1 está activado. Si después del enmascaramiento aún está activado
como mínimo un bit, también se activará el bit 14 del statusword.

6 Mando del equipo (Device Control)
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 175
La siguiente figura muestra un ejemplo aclaratorio:
Bit Bit Bit Bit Bit Bit Bit Bit Bit Bit
0 1 2 3 4 … … 27 28 29 30 31
1 1 1 1 0 0 0 0 0 0
Manufacturer_
statusword_1
2000h_01h
0 0 1 1 0 … … 0 1 1 0 0
Manufacturer_
status_invert_1
200Ah_01h
= 1 1 0 0 0 … … 0 1 1 0 0
0 1 0 1 0 … … 0 0 1 0 0
Manufacturer_
status_mask_1
2005h_01h
= 0 1 0 0 0 … … 0 0 1 0 0
o bien
Bit Bit Bit Bit Bit Bit Bit Bit Bit Bit Bit Bit Bit Bit Bit Bit
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
X X X X X X X X X X X X X X 1 Xstatusword
6041h_00h
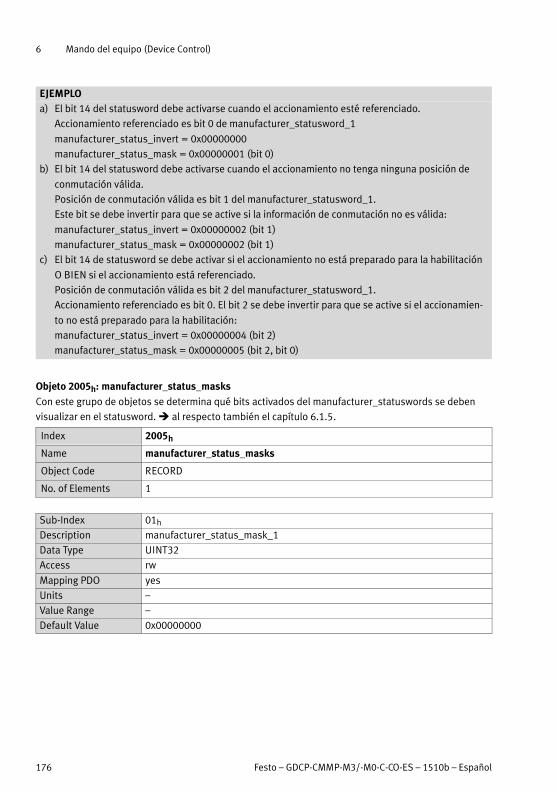
6 Mando del equipo (Device Control)
176 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
EJEMPLOa) El bit 14 del statusword debe activarse cuando el accionamiento esté referenciado.
Accionamiento referenciado es bit 0 de manufacturer_statusword_1
manufacturer_status_invert = 0x00000000
manufacturer_status_mask = 0x00000001 (bit 0)
b) El bit 14 del statusword debe activarse cuando el accionamiento no tenga ninguna posición de
conmutación válida.
Posición de conmutación válida es bit 1 del manufacturer_statusword_1.
Este bit se debe invertir para que se active si la información de conmutación no es válida:
manufacturer_status_invert = 0x00000002 (bit 1)
manufacturer_status_mask = 0x00000002 (bit 1)
c) El bit 14 de statusword se debe activar si el accionamiento no está preparado para la habilitación
O BIEN si el accionamiento está referenciado.
Posición de conmutación válida es bit 2 del manufacturer_statusword_1.
Accionamiento referenciado es bit 0. El bit 2 se debe invertir para que se active si el accionamien
to no está preparado para la habilitación:
manufacturer_status_invert = 0x00000004 (bit 2)
manufacturer_status_mask = 0x00000005 (bit 2, bit 0)
Objeto 2005h: manufacturer_status_masks
Con este grupo de objetos se determina qué bits activados del manufacturer_statuswords se deben
visualizar en el statusword. � al respecto también el capítulo 6.1.5.
Index 2005h
Name manufacturer_status_masks
Object Code RECORD
No. of Elements 1
Sub-Index 01h
Description manufacturer_status_mask_1
Data Type UINT32
Access rw
Mapping PDO yes
Units –
Value Range –
Default Value 0x00000000
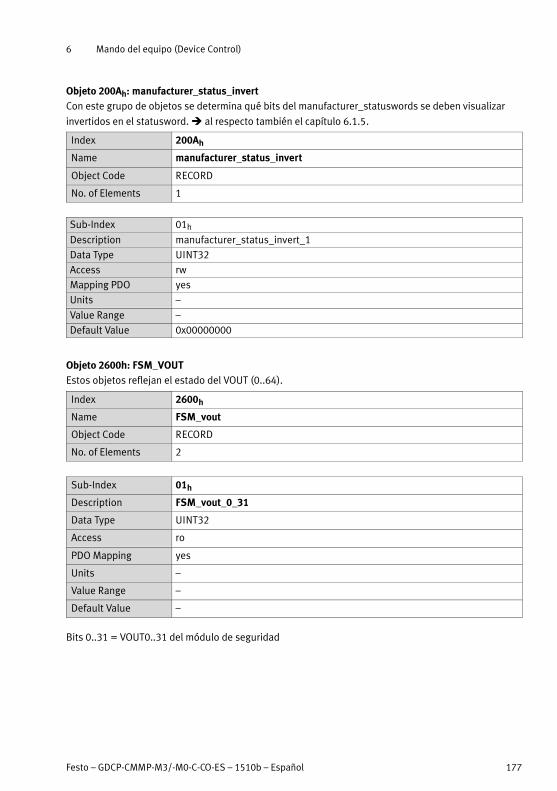
6 Mando del equipo (Device Control)
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 177
Objeto 200Ah: manufacturer_status_invertCon este grupo de objetos se determina qué bits del manufacturer_statuswords se deben visualizar
invertidos en el statusword. � al respecto también el capítulo 6.1.5.
Index 200Ah
Name manufacturer_status_invert
Object Code RECORD
No. of Elements 1
Sub-Index 01h
Description manufacturer_status_invert_1
Data Type UINT32
Access rw
Mapping PDO yes
Units –
Value Range –
Default Value 0x00000000
Objeto 2600h: FSM_VOUTEstos objetos reflejan el estado del VOUT (0..64).
Index 2600h
Name FSM_vout
Object Code RECORD
No. of Elements 2
Sub-Index 01h
Description FSM_vout_0_31
Data Type UINT32
Access ro
PDO Mapping yes
Units –
Value Range –
Default Value –
Bits 0..31 = VOUT0..31 del módulo de seguridad

6 Mando del equipo (Device Control)
178 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Sub-Index 02h
Description FSM_vout_32_63
Data Type UINT32
Access ro
PDO Mapping yes
Units –
Value Range –
Default Value –
Bits 0..31 = VOUT32..63 del módulo de seguridad
Objeto 2602h: FSM_IO
Lea los niveles en las entradas del módulo de seguridad
Index 2602h
Name FSM_io
Object Code RECORD
No. of Elements 1
Sub-Index 01h
Description FSM_dig_io
Data Type UINT32
Access ro
PDO Mapping yes
Units –
Value Range –
Default Value –
FSM_dig_io
Bit Señal Descripción
Bit 0 LOUT48 Estado lógico DIN40 A/B
Bit 1 LOUT49 Estado lógico DIN41 A/B
Bit 2 LOUT50 Estado lógico DIN42 A/B
Bit 3 LOUT51 Estado lógico DIN43 A/B
Bit 4 LOUT52 Estado lógico DIN44
Bit 5 LOUT53 Estado lógico DIN45, selector del modo de servicio (1 de 3)
Bit 6 LOUT54 Estado lógico DIN46, selector del modo de servicio (1 de 3)
Bit 7 LOUT55 Estado lógico DIN47, selector del modo de servicio (1 de 3)
Bit 8 LOUT56 Acuse de recibo del error sobre DIN48
Bit 9 LOUT57 Rearranque sobre DIN49

6 Mando del equipo (Device Control)
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 179
FSM_dig_io
Bit DescripciónSeñal
Bit 10 LOUT58 Estado lógico de la unidad de indicación y control a dos manos (par de
2 x DIN4x)
Bit 11 LOUT59 Retroseñal del freno de inmovilización
Bit 12 ... 15 LOUT60 ... 63 No asignado
Bit 16 LOUT64 Estado de la salida DOUT40
Bit 17 LOUT65 Estado de la salida DOUT41
Bit 18 LOUT66 Estado de la salida DOUT42
Bit 19 LOUT67 Estado del relé de señal
Bit 20 LOUT68 Accionamiento de los frenos
Bit 21 LOUT69 Estado de la señal de control SS1
Bit 22 ... 31 LOUT70 ... No asignado
Tab. 6.11 Asignación de bits FSM_dig_io
6.1.6 Descripción de los demás objetos
Objetos tratados en este capítulo
Index Objeto Nombre Tipo Attr.
605Bh VAR shutdown_option_code INT16 rw
605Ch VAR disable_operation_option_code INT16 rw
605Ah VAR quick_stop_option_code INT16 rw
605Eh VAR fault_reaction_option_code INT16 rw
Objeto 605Bh: shutdown_option_codeCon el objeto shutdown_option_code se especifica el comportamiento del controlador del motor en la
transición de estado 8 (de OPERATION ENABLE a READY TO SWITCH ON). El objeto indica el comportam
iento implementado del controlador de motor. No se puede modificar.
Index 605Bh
Name shutdown_option_code
Object Code VAR
Data Type INT16
Access rw
Mapping PDO no
Units –
Value Range 0
Default Value 0
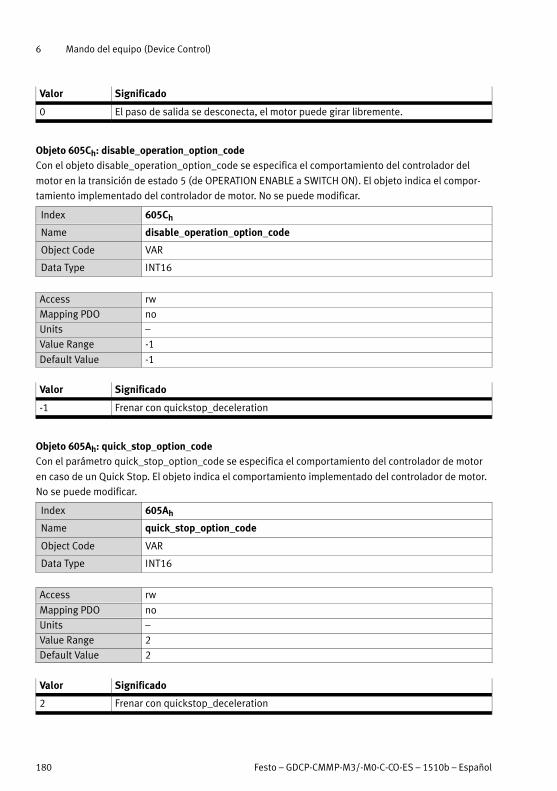
6 Mando del equipo (Device Control)
180 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Valor Significado
0 El paso de salida se desconecta, el motor puede girar libremente.
Objeto 605Ch: disable_operation_option_codeCon el objeto disable_operation_option_code se especifica el comportamiento del controlador del
motor en la transición de estado 5 (de OPERATION ENABLE a SWITCH ON). El objeto indica el compor
tamiento implementado del controlador de motor. No se puede modificar.
Index 605Ch
Name disable_operation_option_code
Object Code VAR
Data Type INT16
Access rw
Mapping PDO no
Units –
Value Range -1
Default Value -1
Valor Significado
-1 Frenar con quickstop_deceleration
Objeto 605Ah: quick_stop_option_codeCon el parámetro quick_stop_option_code se especifica el comportamiento del controlador de motor
en caso de un Quick Stop. El objeto indica el comportamiento implementado del controlador de motor.
No se puede modificar.
Index 605Ah
Name quick_stop_option_code
Object Code VAR
Data Type INT16
Access rw
Mapping PDO no
Units –
Value Range 2
Default Value 2
Valor Significado
2 Frenar con quickstop_deceleration

6 Mando del equipo (Device Control)
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 181
Objeto 605Eh: fault_reaction_option_codeCon el objeto quick_stop_option_code se especifica el comportamiento del controlador de motor en
caso de un error (fault). Dado que en la serie CMMP la reacción de error depende del error respectivo,
este objeto no se puede parametrizar y siempre retorna un 0. Para modificar la reacción de error de
cada uno de los errores � capítulo 5.18, Gestión de errores.
Index 605Eh
Name fault_reaction_option_code
Object Code VAR
Data Type INT16
Access rw
Mapping PDO no
Units –
Value Range 0
Default Value 0

7 Modos de funcionamiento
182 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
7 Modos de funcionamiento
7.1 Ajuste del modo de funcionamiento
7.1.1 Cuadro general
El controlador de motor dispone de numerosos modos de funcionamiento. Sólo algunos de ellos están
especificados detalladamente bajo CANopen:
– Funcionamiento regulado por el par – profile torque mode
– Funcionamiento regulado por la velocidad – profile velocity mode
– Recorrido de referencia – homing mode
– Funcionamiento con posicionado – profile position mode
– Especificación sincrónica de la posición – interpolated position mode
– Especificación cíclico-sincrónica de la posición
(solo en EtherCAT)
– cyclic synchronous position mode
7.1.2 Descripción de los objetos
Objetos tratados en este capítulo
Index Objeto Nombre Tipo Attr.
6060h VAR modes_of_operation INT8 wo
6061h VAR modes_of_operation_display INT8 ro
Objeto 6060h: modes_of_operationCon el objeto modes_of_operation se ajusta el modo de funcionamiento del controlador de motor.
Index 6060h
Name modes_of_operation
Object Code VAR
Data Type INT8
Access rw
Mapping PDO yes
Units –
Value Range 1, 3, 4, 6, 7
Default Value –

7 Modos de funcionamiento
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 183
Valor Significado
1 Profile Position Mode (controlador de posición con modo de posicionamiento)
3 Profile Velocity Mode (regulador de velocidad con rampa de valor nominal)
4 Profile Torque Mode (regulador de par con rampa de valor nominal)
6 Homing Mode (recorrido de referencia)
7 Interpolated Position Mode
8 Cyclic Synchronous Position Mode (solo en EtherCAT)
El modo de funcionamiento actual sólo puede leerse en el objeto
modes_of_operation_display. Dado que un cambio del modo de funcionamiento puede
tardar cierto tiempo, se debe esperar hasta que aparezca el nuevo modo seleccionado en
el objeto modes_of_operation_display.
Objeto 6061h: modes_of_operation_display
En el objeto modes_of_operation_display puede leerse el modo de funcionamiento actual del con
trolador de motor. Si se ajusta un modo de funcionamiento a través del objeto 6060h, además del
modo de funcionamiento propiamente dicho también se realizan las conexiones de valor nominal
(selector de valor nominal) necesarias para el funcionamiento del controlador del motor con CANopen.
Se trata de los siguientes contenidos didácticos:
Selector Profile Velocity Mode Profile Torque Mode
A Valor nominal de velocidad (bus de campo 1) Valor nominal de par (bus de campo 1)
B En caso necesario, limitación de par En caso necesario, limitación de
velocidad
C Valor nominal de velocidad (velocidad sin
crónica)
inactivo
También se conecta por principio la rampa de valor nominal. Sólo se devuelve uno de los modos de
funcionamiento CANopen una vez que estas conexiones se han ajustado del modo indicado. Si estos
ajustes se modifican, p. ej., con el software de parametrización, se devuelve un modo de funcionamien
to “User” para indicar que los selectores han sido modificados.
Index 6061h
Name modes_of_operation_display
Object Code VAR
Data Type INT8
Access ro
Mapping PDO yes
Units –
Value Range ver tabla
Default Value 3
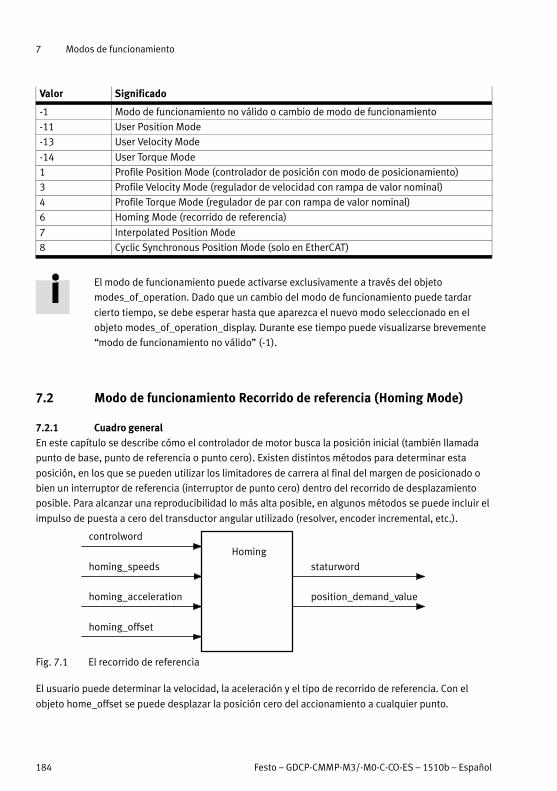
7 Modos de funcionamiento
184 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Valor Significado
-1 Modo de funcionamiento no válido o cambio de modo de funcionamiento
-11 User Position Mode
-13 User Velocity Mode
-14 User Torque Mode
1 Profile Position Mode (controlador de posición con modo de posicionamiento)
3 Profile Velocity Mode (regulador de velocidad con rampa de valor nominal)
4 Profile Torque Mode (regulador de par con rampa de valor nominal)
6 Homing Mode (recorrido de referencia)
7 Interpolated Position Mode
8 Cyclic Synchronous Position Mode (solo en EtherCAT)
El modo de funcionamiento puede activarse exclusivamente a través del objeto
modes_of_operation. Dado que un cambio del modo de funcionamiento puede tardar
cierto tiempo, se debe esperar hasta que aparezca el nuevo modo seleccionado en el
objeto modes_of_operation_display. Durante ese tiempo puede visualizarse brevemente
“modo de funcionamiento no válido” (-1).
7.2 Modo de funcionamiento Recorrido de referencia (Homing Mode)
7.2.1 Cuadro generalEn este capítulo se describe cómo el controlador de motor busca la posición inicial (también llamada
punto de base, punto de referencia o punto cero). Existen distintos métodos para determinar esta
posición, en los que se pueden utilizar los limitadores de carrera al final del margen de posicionado o
bien un interruptor de referencia (interruptor de punto cero) dentro del recorrido de desplazamiento
posible. Para alcanzar una reproducibilidad lo más alta posible, en algunos métodos se puede incluir el
impulso de puesta a cero del transductor angular utilizado (resolver, encoder incremental, etc.).
Homing
controlword
homing_speeds
homing_acceleration
homing_offset
staturword
position_demand_value
Fig. 7.1 El recorrido de referencia
El usuario puede determinar la velocidad, la aceleración y el tipo de recorrido de referencia. Con el
objeto home_offset se puede desplazar la posición cero del accionamiento a cualquier punto.

7 Modos de funcionamiento
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 185
Existen dos velocidades de recorrido de referencia. La velocidad de búsqueda más alta (spe
ed_during_search_for_switch) se utiliza para encontrar el limitador de carrera o el interruptor de
referencia. Para poder determinar con exactitud la posición del flanco de conexión correspondiente se
conmuta a la velocidad lenta (speed_during_search_for_zero).
Si no es necesario referenciar de nuevo el accionamiento, sino únicamente situar la posición en un
valor predeterminado, se puede utilizar el objeto 2030h (set_position_absolute) � página 120.
El desplazamiento a la posición cero en general no es un componente del recorrido de
referencia en CANopen. Si el controlador de motor conoce todas las magnitudes necesar
ias (p. ej., porque ya conoce la posición del impulso de puesta a cero) no se efectúa nin
gún movimiento físico.
Este comportamiento se puede modificar a través del objeto 6510h_F0h (com
patibility_control, � cap. 5.2), de modo que siempre se realiza un recorrido a cero.
7.2.2 Descripción de los objetos
Objetos tratados en este capítulo
Index Objeto Nombre Tipo Attr.
607Ch VAR home_offset INT32 rw
6098h VAR homing_method INT8 rw
6099h ARRAY homing_speeds UINT32 rw
609Ah VAR homing_acceleration UINT32 rw
2045h VAR homing_timeout UINT16 rw
Objetos relacionados de otros capítulos
Index Objeto Nombre Tipo Capítulo
6040h VAR controlword UINT16 6.1.3 Controlword
(palabra de control)
6041h VAR statusword UINT16 6.1.5 Statuswords
(palabras de estado)
Objeto 607Ch: home_offsetEl objeto home_offset fija el desplazamiento de la posición cero frente a la posición de referencia
determinada.
home_offset
HomePosition
ZeroPosition
Fig. 7.2 Home Offset

7 Modos de funcionamiento
186 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Index 607Ch
Name home_offset
Object Code VAR
Data Type INT32
Access rw
Mapping PDO yes
Units position units
Value Range –
Default Value 0
Objeto 6098h: homing_method
Existen diferentes métodos para realizar un recorrido de referencia. Mediante el objeto ho
ming_method se puede seleccionar la variante requerida para la aplicación. Existen cuatro posibles
señales del recorrido de referencia: los detectores de final de carrera negativo y positivo, el interruptor
de referencia y el impulso de puesta a cero (periódico) del transductor angular. Además el controlador
de motor se puede referenciar en el tope negativo o positivo sin ninguna señal adicional. Si se deter
mina un método de referenciado a través del objeto homing_method , con ello se realizan los siguien
tes ajustes:
– El origen de referencia (limitador de carrera neg./pos., interruptor de referencia, tope neg./pos.)
– El sentido y la secuencia del recorrido de referencia
– El tipo de evaluación del impulso de puesta a cero del transductor angular utilizado
Index 6098h
Name homing_method
Object Code VAR
Data Type INT8
Access rw
Mapping PDO yes
Units
Value Range -18, -17, -2, -1, 1, 2, 7, 11, 17, 18, 23, 27, 32, 33, 34, 35
Default Value 17
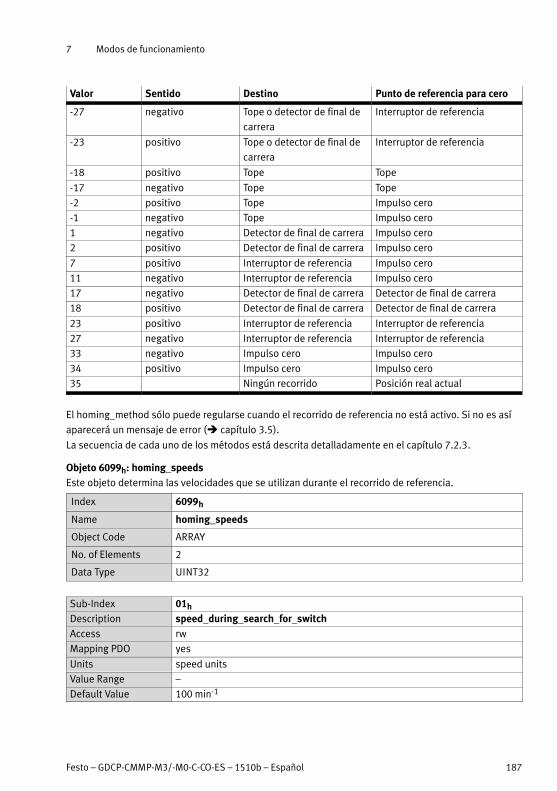
7 Modos de funcionamiento
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 187
Valor Sentido Destino Punto de referencia para cero
-27 negativo Tope o detector de final de
carrera
Interruptor de referencia
-23 positivo Tope o detector de final de
carrera
Interruptor de referencia
-18 positivo Tope Tope
-17 negativo Tope Tope
-2 positivo Tope Impulso cero
-1 negativo Tope Impulso cero
1 negativo Detector de final de carrera Impulso cero
2 positivo Detector de final de carrera Impulso cero
7 positivo Interruptor de referencia Impulso cero
11 negativo Interruptor de referencia Impulso cero
17 negativo Detector de final de carrera Detector de final de carrera
18 positivo Detector de final de carrera Detector de final de carrera
23 positivo Interruptor de referencia Interruptor de referencia
27 negativo Interruptor de referencia Interruptor de referencia
33 negativo Impulso cero Impulso cero
34 positivo Impulso cero Impulso cero
35 Ningún recorrido Posición real actual
El homing_method sólo puede regularse cuando el recorrido de referencia no está activo. Si no es así
aparecerá un mensaje de error (� capítulo 3.5).
La secuencia de cada uno de los métodos está descrita detalladamente en el capítulo 7.2.3.
Objeto 6099h: homing_speedsEste objeto determina las velocidades que se utilizan durante el recorrido de referencia.
Index 6099h
Name homing_speeds
Object Code ARRAY
No. of Elements 2
Data Type UINT32
Sub-Index 01h
Description speed_during_search_for_switchAccess rw
Mapping PDO yes
Units speed units
Value Range –
Default Value 100 min-1

7 Modos de funcionamiento
188 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Sub-Index 02h
Description speed_during_search_for_zero
Access rw
Mapping PDO yes
Units speed units
Value Range –
Default Value 10 min-1
Si se activa el bit 6 del objeto compatibility_control (� cap. 5.2), después del recorrido
de referencia se ejecuta un desplazamiento a cero.
Si este bit está activado y se escribe el objeto speed_during_search_for_switch , se in
troduce tanto la velocidad para la búsqueda del interruptor, como la velocidad para el
desplazamiento a cero.
Objeto 609Ah: homing_accelerationEl objeto homing_acceleration determina la aceleración que se utilizará durante el recorrido de referen
cia para todos los frenados y aceleraciones.
Index 609Ah
Name homing_acceleration
Object Code VAR
Data Type UINT32
Access rw
Mapping PDO yes
Units acceleration units
Value Range –
Default Value 1000 min-1/s
Objeto 2045h: homing_timeoutSe puede supervisar el tiempo máximo de ejecución del recorrido de referencia. Para ello se puede
indicar el tiempo máximo de ejecución en el objeto homing_timeout. Si se sobrepasa dicho tiempo sin
que haya finalizado el recorrido de referencia, se emitirá el error 11-3.
Index 2045h
Name homing_timeout
Object Code VAR
Data Type UINT16
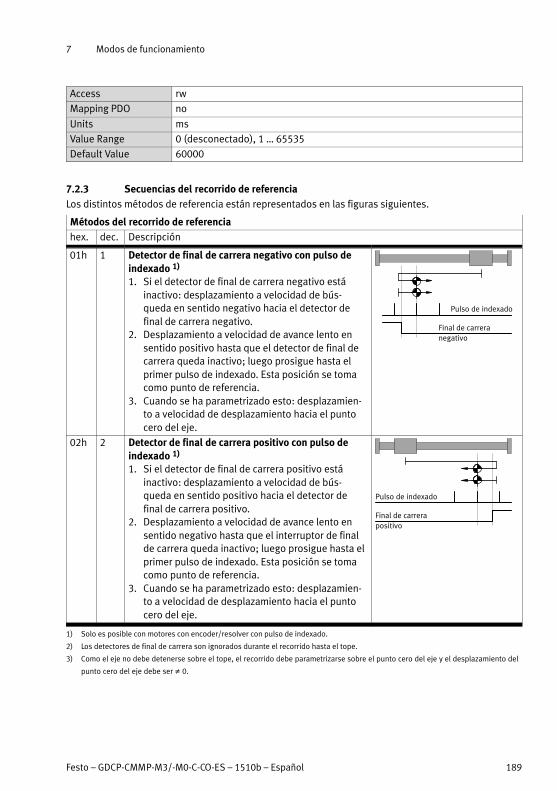
7 Modos de funcionamiento
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 189
Access rw
Mapping PDO no
Units ms
Value Range 0 (desconectado), 1 … 65535
Default Value 60000
7.2.3 Secuencias del recorrido de referenciaLos distintos métodos de referencia están representados en las figuras siguientes.
Métodos del recorrido de referenciahex. dec. Descripción
01h 1 Detector de final de carrera negativo con pulso deindexado 1)
1. Si el detector de final de carrera negativo estáinactivo: desplazamiento a velocidad de búsqueda en sentido negativo hacia el detector definal de carrera negativo.
2. Desplazamiento a velocidad de avance lento ensentido positivo hasta que el detector de final decarrera queda inactivo; luego prosigue hasta elprimer pulso de indexado. Esta posición se tomacomo punto de referencia.
3. Cuando se ha parametrizado esto: desplazamiento a velocidad de desplazamiento hacia el puntocero del eje.
Pulso de indexado
Final de carreranegativo
02h 2 Detector de final de carrera positivo con pulso deindexado 1)
1. Si el detector de final de carrera positivo estáinactivo: desplazamiento a velocidad de búsqueda en sentido positivo hacia el detector definal de carrera positivo.
2. Desplazamiento a velocidad de avance lento ensentido negativo hasta que el interruptor de finalde carrera queda inactivo; luego prosigue hasta elprimer pulso de indexado. Esta posición se tomacomo punto de referencia.
3. Cuando se ha parametrizado esto: desplazamiento a velocidad de desplazamiento hacia el puntocero del eje.
Pulso de indexado
Final de carrerapositivo
1) Solo es posible con motores con encoder/resolver con pulso de indexado.
2) Los detectores de final de carrera son ignorados durante el recorrido hasta el tope.
3) Como el eje no debe detenerse sobre el tope, el recorrido debe parametrizarse sobre el punto cero del eje y el desplazamiento del
punto cero del eje debe ser ≠ 0.

7 Modos de funcionamiento
190 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Métodos del recorrido de referencia
hex. Descripcióndec.
07h 7 Interruptor de referencia en sentido positivo conpulso de indexado 1)
1. Si el interruptor de referencia está inactivo: desplazamiento a velocidad de búsqueda en sentido positivo hacia el interruptor de referencia. Si al desplazarse llega a un tope o a un detectorde final de carrera: desplazamiento a velocidad debúsqueda en sentido negativo hacia el interruptorde referencia.
2. Recorrido a velocidad de avance lento en sentidonegativo hasta que el interruptor de referenciaqueda inactivo; luego prosigue hasta el primerpulso de indexado. Esta posición se toma comopunto de referencia.
3. Cuando se ha parametrizado esto: desplazamiento a velocidad de desplazamiento hacia el puntocero del eje.
Pulso deindexado
Interruptor dereferencia
0B 11 Interruptor de referencia en sentido negativo conpulso de indexado 1)
1. Si el interruptor de referencia está inactivo: desplazamiento a velocidad de búsqueda en sentido negativo hacia el interruptor de referencia. Si al desplazarse llega a un tope o a un detectorde final de carrera: desplazamiento a velocidad debúsqueda en sentido positivo hacia el interruptorde referencia.
2. Recorrido a velocidad de avance lento en sentidopositivo hasta que el interruptor de referenciaqueda inactivo; luego prosigue hasta el primerpulso de indexado. Esta posición se toma comopunto de referencia.
3. Cuando se ha parametrizado esto: desplazamiento a velocidad de desplazamiento hacia el puntocero del eje.
Pulso deindexado
Interruptor de referencia
11h 17 Final de carrera negativo1. Si el detector de final de carrera negativo está
inactivo: desplazamiento a velocidad de búsqueda en sentido negativo hacia el detector definal de carrera negativo.
2. Desplazamiento a velocidad de avance lento ensentido positivo hasta que el detector de final decarrera esté inactivo. Esta posición se toma comopunto de referencia.
3. Cuando se ha parametrizado esto: desplazamiento a velocidad de desplazamiento hacia el puntocero del eje.
Final de carrera negativo
1) Solo es posible con motores con encoder/resolver con pulso de indexado.
2) Los detectores de final de carrera son ignorados durante el recorrido hasta el tope.
3) Como el eje no debe detenerse sobre el tope, el recorrido debe parametrizarse sobre el punto cero del eje y el desplazamiento del
punto cero del eje debe ser ≠ 0.

7 Modos de funcionamiento
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 191
Métodos del recorrido de referencia
hex. Descripcióndec.
12h 18 Final de carrera positivo1. Si el detector de final de carrera positivo está
inactivo: desplazamiento a velocidad de búsqueda en sentido positivo hacia el detector definal de carrera positivo.
2. Movimiento a velocidad de avance lento en sentido negativo hasta que el detector de final decarrera esté inactivo. Esta posición se toma comopunto de referencia.
3. Cuando se ha parametrizado esto: desplazamiento a velocidad de desplazamiento hacia el puntocero del eje.
Final de carrera positivo
17h 23 Interruptor de referencia en sentido positivo1. Si el interruptor de referencia está inactivo:
desplazamiento a velocidad de búsqueda en sentido positivo hacia el interruptor de referencia. Si al desplazarse llega a un tope o a un detectorde final de carrera: desplazamiento a velocidad debúsqueda en sentido negativo hacia el interruptorde referencia.
2. Movimiento a velocidad de avance lento en sentido negativo hasta que el interruptor de referencia esté inactivo. Esta posición se toma como punto de referencia.
3. Cuando se ha parametrizado esto: desplazamiento a velocidad de desplazamiento hacia el puntocero del eje.
Interruptor de referencia
1Bh 27 Interruptor de referencia en sentido negativo1. Si el interruptor de referencia está inactivo:
desplazamiento a velocidad de búsqueda en sentido negativo hacia el interruptor de referencia. Si al desplazarse llega a un tope o a un detectorde final de carrera: desplazamiento a velocidad debúsqueda en sentido positivo hacia el interruptorde referencia.
2. Movimiento a velocidad de avance lento en sentido positivo hasta que el interruptor de referencia esté inactivo. Esta posición se toma como punto de referencia.
3. Cuando se ha parametrizado esto: desplazamiento a velocidad de desplazamiento hacia el puntocero del eje.
Interruptor de referencia
1) Solo es posible con motores con encoder/resolver con pulso de indexado.
2) Los detectores de final de carrera son ignorados durante el recorrido hasta el tope.
3) Como el eje no debe detenerse sobre el tope, el recorrido debe parametrizarse sobre el punto cero del eje y el desplazamiento del
punto cero del eje debe ser ≠ 0.

7 Modos de funcionamiento
192 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Métodos del recorrido de referencia
hex. Descripcióndec.
21h 33 Pulso de indexado en sentido negativo 1)
1. Desplazamiento a velocidad de avance lento ensentido negativo hasta el pulso de indexado. Estaposición se toma como punto de referencia.
2. Cuando se ha parametrizado esto: desplazamiento a velocidad de desplazamiento hacia el puntocero del eje.
Pulso de indexado
22h 34 Pulso de indexado en sentido positivo 1)
1. Desplazamiento a velocidad de avance lento ensentido positivo hasta el pulso de indexado. Estaposición se toma como punto de referencia.
2. Cuando se ha parametrizado esto: desplazamiento a velocidad de desplazamiento hacia el puntocero del eje.
Pulso de indexado
23h 35 Posición actual1. La posición actual se toma como punto de
referencia.2. Cuando se ha parametrizado esto: desplazamien
to a velocidad de desplazamiento hacia el puntocero del eje.
Si no es necesario referenciar de nuevo el accionamiento, sino únicamente poner un valor especificadopara la posición, entonces se puede utilizar el objeto2030h (set_position_absolute). � al respecto lapágina 120.
FFh -1 Tope negativo con pulso de indexado 1) 2)
1. Desplazamiento a velocidad de búsqueda en sentido negativo hacia el tope.
2. Desplazamiento a velocidad de avance lento ensentido positivo hasta el próximo pulso de indexado. Esta posición se toma como punto dereferencia.
3. Cuando se ha parametrizado esto: desplazamiento a velocidad de desplazamiento hacia el puntocero del eje.
Pulso de indexado
FEh -2 Tope positivo con pulso de indexado 1) 2)
1. Desplazamiento a velocidad de búsqueda en sentido positivo hacia el tope.
2. Desplazamiento a velocidad de avance lento ensentido negativo hasta el próximo pulso de indexado. Esta posición se toma como punto dereferencia.
3. Cuando se ha parametrizado esto: desplazamiento a velocidad de desplazamiento hacia el puntocero del eje.
Pulso de indexado
1) Solo es posible con motores con encoder/resolver con pulso de indexado.
2) Los detectores de final de carrera son ignorados durante el recorrido hasta el tope.
3) Como el eje no debe detenerse sobre el tope, el recorrido debe parametrizarse sobre el punto cero del eje y el desplazamiento del
punto cero del eje debe ser ≠ 0.

7 Modos de funcionamiento
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 193
Métodos del recorrido de referencia
hex. Descripcióndec.
EFh -17 Tope negativo 1) 2) 3)
1. Desplazamiento a velocidad de búsqueda en sentido negativo hacia el tope. Esta posición se tomacomo punto de referencia.
2. Cuando se ha parametrizado esto: desplazamiento a velocidad de desplazamiento hacia el puntocero del eje.
EEh -18 Tope positivo 1) 2) 3)
1. Desplazamiento a velocidad de búsqueda en sentido positivo hacia el tope. Esta posición se tomacomo punto de referencia.
2. Cuando se ha parametrizado esto: desplazamiento a velocidad de desplazamiento hacia el puntocero del eje.
E9h -23 Interruptor de referencia en sentido positivo conrecorrido hasta el tope o el detector de final de carrera.1. Movimiento a velocidad de búsqueda en sentido
positivo hacia el tope o el detector de final de carrera.
2. Recorrido a velocidad de búsqueda en sentidonegativo hacia el interruptor de referencia.
3. Movimiento a velocidad de avance lento en sentido negativo hasta que el interruptor de referencia esté inactivo. Esta posición se toma como punto de referencia.
4. Cuando se ha parametrizado esto: desplazamiento a velocidad de desplazamiento hacia el puntocero del eje.
Interruptor de referencia
E5h -27 Interruptor de referencia en sentido positivo conrecorrido hasta el tope o el detector de final decarrera.1. Movimiento a velocidad de búsqueda en sentido
negativo hacia el tope o el detector de final decarrera.
2. Desplazamiento a velocidad de búsqueda en sentido positivo hacia el interruptor de referencia.
3. Desplazamiento a velocidad de avance lento ensentido positivo hasta que el interruptor dereferencia esté inactivo. Esta posición se tomacomo punto de referencia.
4. Cuando se ha parametrizado esto: desplazamiento a velocidad de desplazamiento hacia el puntocero del eje.
Interruptor dereferencia
1) Solo es posible con motores con encoder/resolver con pulso de indexado.
2) Los detectores de final de carrera son ignorados durante el recorrido hasta el tope.
3) Como el eje no debe detenerse sobre el tope, el recorrido debe parametrizarse sobre el punto cero del eje y el desplazamiento del
punto cero del eje debe ser ≠ 0.
Tab. 7.1 Resumen de los métodos de recorrido de referencia
7 Modos de funcionamiento
194 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
7.2.4 Control del recorrido de referenciaEl recorrido de referencia se controla y supervisa a través de controlword / statusword. Para iniciarlo se
debe activar el bit 4 en el controlword. Si el bit 12 del objeto statusword está activo significa que el
recorrido ha finalizado correctamente. Si el bit 13 del objeto statusword está activo significa que se ha
producido un fallo durante el recorrido de referencia. La causa del error puede determinarse a través
de los objetos error_register y pre_defined_error_field.
Bit 4 Significado
1 Recorrido de referencia no activo
0 � 1 Iniciar recorrido de referencia
1 Recorrido de referencia activo
1 � 0 Interrumpir recorrido de referencia
Tab. 7.2 Descripción de los bits en controlword
Bit 13 Bit 12 Significado
0 0 Recorrido de referencia aún no finalizado
0 1 Recorrido de referencia ejecutado correctamente
1 0 Recorrido de referencia no ejecutado correctamente
1 1 Estado prohibido
Tab. 7.3 Descripción de los bits en statusword
7.3 Modo de funcionamiento Posicionamiento (Profile Position Mode)
7.3.1 Cuadro generalLa estructura de este modo de funcionamiento se muestra en Fig. 7.3:
La posición de destino (target_position) se transmite al generador de curvas de desplazamiento. Éste
genera un valor nominal de posición (position_demand_value) para el regulador de posición, que se
describe en el capítulo Regulador de posición (Position Control Function, capítulo 6). Estos dos bloques
de funciones pueden ajustarse independientemente uno de otro.
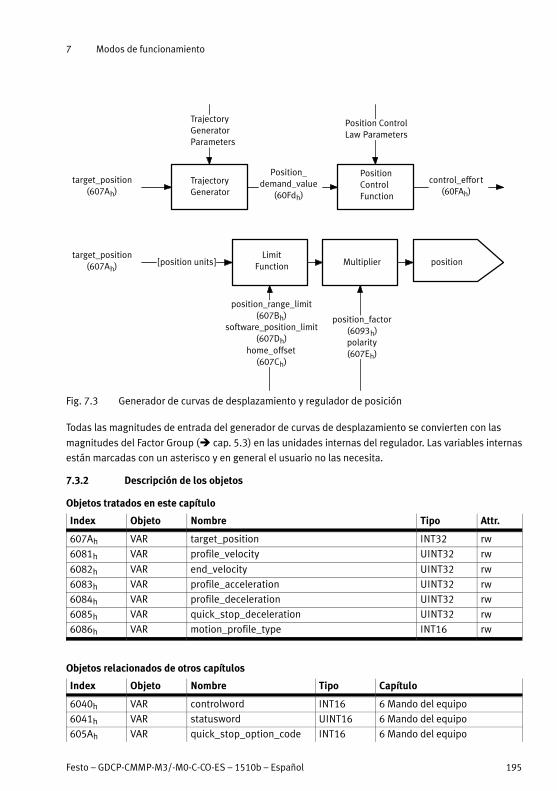
7 Modos de funcionamiento
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 195
position_factor(6093h)polarity(607Eh)
control_effort(60FAh)
TrajectoryGenerator
Position_demand_value
(60Fdh)
positionMultiplierLimit
Function[position units]target_position
(607Ah)
target_position(607Ah)
TrajectoryGeneratorParameters
Position ControlLaw Parameters
PositionControlFunction
position_range_limit(607Bh)
software_position_limit(607Dh)
home_offset(607Ch)
Fig. 7.3 Generador de curvas de desplazamiento y regulador de posición
Todas las magnitudes de entrada del generador de curvas de desplazamiento se convierten con las
magnitudes del Factor Group (� cap. 5.3) en las unidades internas del regulador. Las variables internas
están marcadas con un asterisco y en general el usuario no las necesita.
7.3.2 Descripción de los objetos
Objetos tratados en este capítulo
Index Objeto Nombre Tipo Attr.
607Ah VAR target_position INT32 rw
6081h VAR profile_velocity UINT32 rw
6082h VAR end_velocity UINT32 rw
6083h VAR profile_acceleration UINT32 rw
6084h VAR profile_deceleration UINT32 rw
6085h VAR quick_stop_deceleration UINT32 rw
6086h VAR motion_profile_type INT16 rw
Objetos relacionados de otros capítulos
Index Objeto Nombre Tipo Capítulo
6040h VAR controlword INT16 6 Mando del equipo
6041h VAR statusword UINT16 6 Mando del equipo
605Ah VAR quick_stop_option_code INT16 6 Mando del equipo

7 Modos de funcionamiento
196 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
607Eh VAR polarity UINT8 5.3 Factores de conversión
6093h ARRAY position_factor UINT32 5.3 Factores de conversión
6094h ARRAY velocity_encoder_factor UINT32 5.3 Factores de conversión
6097h ARRAY acceleration_factor UINT32 5.3 Factores de conversión
Objeto 607Ah: target_positionEl objeto target_position (posición de destino) determina la posición a la que debe desplazarse el con
trolador de motor. Para ello deben tenerse en cuenta los ajustes actuales de la velocidad, la
aceleración, la deceleración de frenado así como el tipo de perfil de movimiento (motion_profile_type)
etc. La posición de destino (target_position) se interpreta como dato absoluto o relativo (controlword,
bit 6).
Index 607Ah
Name target_position
Object Code VAR
Data Type INT32
Access rw
Mapping PDO yes
Units position units
Value Range –
Default Value 0
Objeto 6081h: profile_velocityEl objeto profile_velocity indica la velocidad que se alcanza normalmente durante un posicionamiento
al final de la rampa de aceleración. El objeto profile_velocity se indica en speed units.
Index 6081h
Name profile_velocity
Object Code VAR
Data Type UINT32
Access rw
Mapping PDO yes
Units speed units
Value Range –
Default Value 1000
Objeto 6082h: end_velocity
El objeto end_velocity (velocidad final) define la velocidad que debe tener el accionamiento cuando
alcanza la posición de destino (target_position). Normalmente este objeto debe ponerse en cero para
que el controlador de motor se detenga al alcanzar la posición de destino (target_position). Para posic

7 Modos de funcionamiento
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 197
ionamientos ininterrumpidos puede indicarse una velocidad distinta de cero. El objeto end_velocity se
indica en las mismas unidades que el objetoprofile_velocity.
Index 6082h
Name end_velocity
Object Code VAR
Data Type UINT32
Access rw
Mapping PDO yes
Units speed units
Value Range –
Default Value 0
Objeto 6083h: profile_accelerationEl objeto profile_acceleration indica la aceleración con la que se acelera al valor nominal. Se indica en
las unidades de aceleración (acceleration units) definidas por el usuario (� capítulo 5.3
Factores de conversión (Factor Group)).
Index 6083h
Name profile_acceleration
Object Code VAR
Data Type UINT32
Access rw
Mapping PDO yes
Units acceleration units
Value Range –
Default Value 10000 min-1/s
Objeto 6084h: profile_deceleration
El objeto profile_deceleration indica la deceleración de frenado. Se indica en las unidades de
aceleración (acceleration units) definidas por el usuario (� capítulo 5.3
Factores de conversión (Factor Group)).
Index 6084h
Name profile_deceleration
Object Code VAR
Data Type UINT32
Access rw
Mapping PDO yes
Units acceleration units

7 Modos de funcionamiento
198 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Value Range –
Default Value 10000 min-1/s
Objeto 6085h: quick_stop_deceleration
El objeto quick_stop_deceleration indica con qué deceleración de frenado se detiene el motor cuando
se ejecuta un Quick Stop (� capítulo 6). El objeto quick_stop_deceleration se indica en la misma
unidad que el objeto profile_deceleration.
Index 6085h
Name quick_stop_deceleration
Object Code VAR
Data Type UINT32
Access rw
Mapping PDO yes
Units acceleration units
Value Range –
Default Value 14100 min-1/s

7 Modos de funcionamiento
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 199
Objeto 6086h: motion_profile_typeEl objeto motion_profile_type se utiliza para seleccionar el tipo de perfil de posicionamiento.
Index 6086h
Name motion_profile_type
Object Code VAR
Data Type INT16
Access rw
Mapping PDO yes
Units –
Value Range 0, 2
Default Value 0
Valor Forma de la curva
0 Rampa lineal
2 Rampa sin sacudidas
7.3.3 Descripción del funcionamiento
Existen dos posibilidades para transferir al controlador de motor una posición de destino:
Orden de posicionamiento simpleCuando el controlador del motor ha alcanzado una posición de destino, se lo comunica al host con el
bit target_reached (bit 10 del objeto statusword). En este modo de funcionamiento el controlador de
motor se detiene cuando ha alcanzado el destino.
Secuencia de órdenes de posicionamientoCuando el controlador de motor ha alcanzado un destino, empieza inmediatamente el desplazamiento
al siguiente destino. La transición puede ser fluida, es decir, sin que el controlador de motor se deten
ga. Estos dos métodos se controlan mediante los bits new_set_point y change_set_immediatly en el
objeto controlword y set_point_acknowledge en el objeto statusword. La relación entre estos bits es de
pregunta-respuesta. Así es posible preparar una orden de posicionamiento mientras aún se está
ejecutando otra.
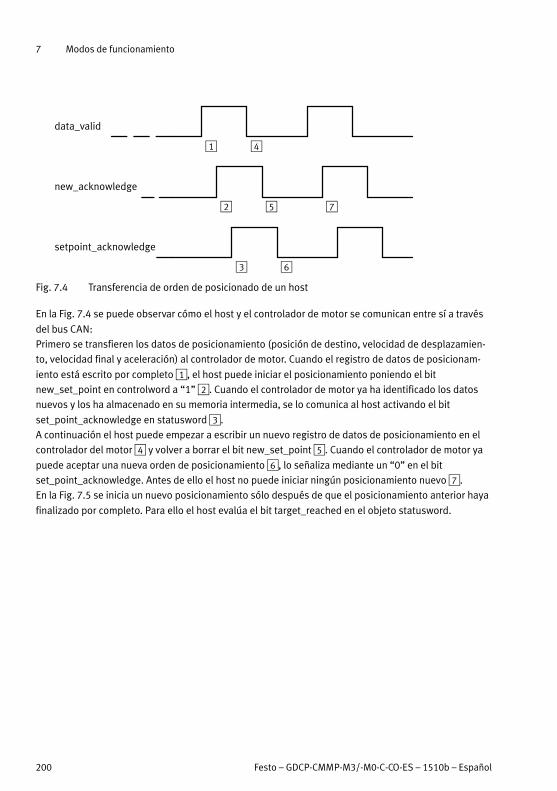
7 Modos de funcionamiento
200 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
setpoint_acknowledge
new_acknowledge
data_valid
2
1
3
4
5
6
7
Fig. 7.4 Transferencia de orden de posicionado de un host
En la Fig. 7.4 se puede observar cómo el host y el controlador de motor se comunican entre sí a través
del bus CAN:
Primero se transfieren los datos de posicionamiento (posición de destino, velocidad de desplazamien
to, velocidad final y aceleración) al controlador de motor. Cuando el registro de datos de posicionam
iento está escrito por completo 1, el host puede iniciar el posicionamiento poniendo el bit
new_set_point en controlword a “1” 2. Cuando el controlador de motor ya ha identificado los datos
nuevos y los ha almacenado en su memoria intermedia, se lo comunica al host activando el bit
set_point_acknowledge en statusword 3.
A continuación el host puede empezar a escribir un nuevo registro de datos de posicionamiento en el
controlador del motor 4 y volver a borrar el bit new_set_point 5. Cuando el controlador de motor ya
puede aceptar una nueva orden de posicionamiento 6, lo señaliza mediante un “0” en el bit
set_point_acknowledge. Antes de ello el host no puede iniciar ningún posicionamiento nuevo 7.
En la Fig. 7.5 se inicia un nuevo posicionamiento sólo después de que el posicionamiento anterior haya
finalizado por completo. Para ello el host evalúa el bit target_reached en el objeto statusword.

7 Modos de funcionamiento
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 201
Tiempot0
v2
v1
t1 t2 t3
Velocity
Fig. 7.5 Orden de posicionamiento simple
En la Fig. 7.6 se inicia un nuevo posicionamiento mientras el anterior aún se está ejecutando. Para ello
el host transfiere al controlador de motor el siguiente destino ya en el momento en que el controlador
señaliza, mediante el borrado del bit set_point_acknowledge, que ha leído el buffer y ha iniciado el
posicionamiento correspondiente. De este modo los posicionamientos se yuxtaponen sin interrupción.
Para que el controlador de motor no frene a cero brevemente cada vez entre un posicionamiento y otro,
para este modo de funcionamiento debe escribirse el objeto end_velocity con el mismo valor que el
objeto profile_velocity.
Tiempot0
v2
v1
t1 t2
Velocity
Fig. 7.6 Secuencia ininterrumpida de órdenes de posicionamiento
Si en el controlword, además del bit new_set_point, también se pone en “1” el bit change_set_immed
iately, el host indica al controlador de motor que el nuevo posicionamiento debe empezar inmed
iatamente. Si se encuentra en proceso una orden de posicionamiento, ésta será interrumpida.

7 Modos de funcionamiento
202 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
7.4 Especificación sincrónica de la posición (Interpolated Position Mode)
7.4.1 Cuadro general
El Interpolated Position Mode (IP) permite la especificación de valores nominales de posición en una
aplicación multiaxial del controlador del motor. Para ello un control de nivel superior especifica teleg
ramas de sincronización (SYNC) y valores nominales de posición en una retícula fija de tiempo (inter
valo de sincronización). Dado que habitualmente el intervalo es mayor que un ciclo del regulador de
posición, el controlador de motor interpola de forma autónoma los valores de datos entre dos valores
de posición especificados, como se muestra en la siguiente gráfica.
Posición
t
1
2
1 Intervalo de sincronización 2 Intervalo de regulación de posición
Fig. 7.7 Orden de posicionamiento interpolación lineal entre dos valores de datos
A continuación se describen en primer lugar los objetos necesarios para el interpolated position mode.
Después se describen detalladamente la activación y la secuencia de parametrización.
7.4.2 Descripción de los objetos
Objetos tratados en este capítulo
Index Objeto Nombre Tipo Attr.
60C0h VAR interpolation_submode_select INT16 rw
60C1h REC interpolation_data_record rw
60C2h REC interpolation_time_period rw
60C3h ARRAY interpolation_sync_definition UINT8 rw
60C4h REC interpolation_data_configuration rw
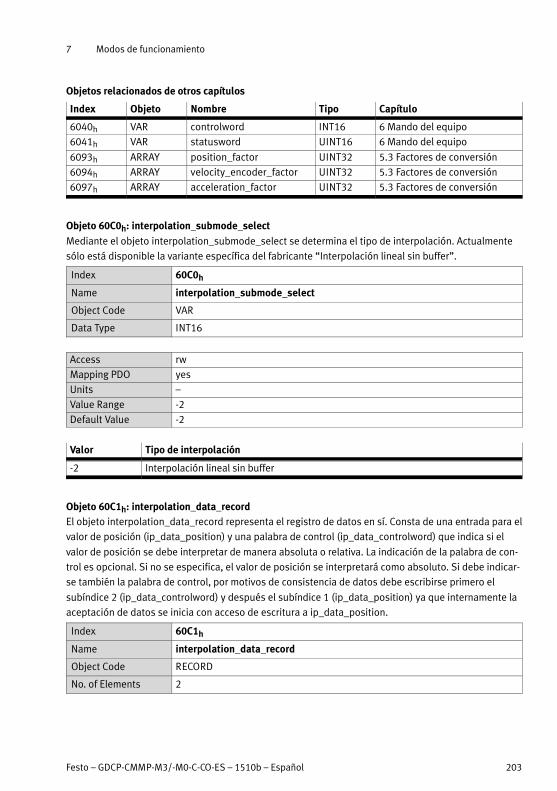
7 Modos de funcionamiento
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 203
Objetos relacionados de otros capítulos
Index Objeto Nombre Tipo Capítulo
6040h VAR controlword INT16 6 Mando del equipo
6041h VAR statusword UINT16 6 Mando del equipo
6093h ARRAY position_factor UINT32 5.3 Factores de conversión
6094h ARRAY velocity_encoder_factor UINT32 5.3 Factores de conversión
6097h ARRAY acceleration_factor UINT32 5.3 Factores de conversión
Objeto 60C0h: interpolation_submode_select
Mediante el objeto interpolation_submode_select se determina el tipo de interpolación. Actualmente
sólo está disponible la variante específica del fabricante “Interpolación lineal sin buffer”.
Index 60C0h
Name interpolation_submode_select
Object Code VAR
Data Type INT16
Access rw
Mapping PDO yes
Units –
Value Range -2
Default Value -2
Valor Tipo de interpolación
-2 Interpolación lineal sin buffer
Objeto 60C1h: interpolation_data_recordEl objeto interpolation_data_record representa el registro de datos en sí. Consta de una entrada para el
valor de posición (ip_data_position) y una palabra de control (ip_data_controlword) que indica si el
valor de posición se debe interpretar de manera absoluta o relativa. La indicación de la palabra de con
trol es opcional. Si no se especifica, el valor de posición se interpretará como absoluto. Si debe indicar
se también la palabra de control, por motivos de consistencia de datos debe escribirse primero el
subíndice 2 (ip_data_controlword) y después el subíndice 1 (ip_data_position) ya que internamente la
aceptación de datos se inicia con acceso de escritura a ip_data_position.
Index 60C1h
Name interpolation_data_record
Object Code RECORD
No. of Elements 2

7 Modos de funcionamiento
204 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Sub-Index 01h
Description ip_data_position
Data Type INT32
Access rw
Mapping PDO yes
Units position units
Value Range –
Default Value –
Sub-Index 02h
Description ip_data_controlword
Data Type UINT8
Access rw
Mapping PDO yes
Units –
Value Range 0, 1
Default Value 0
Valor ip_data_controlword
0 Posición absoluta
1 Distancia relativa
La aceptación interna de datos se realiza con acceso de escritura al subíndice 1.
Si además se debe utilizar el subíndice 2, éste debe escribirse antes que el subíndice 1.
Objeto 60C2h: interpolation_time_periodMediante el objeto interpolation_time_period puede ajustarse el intervalo de sincronización. A través
de ip_time_index se determina la unidad (ms ó 1/10 ms) del intervalo, que se parametriza mediante
ip_time_units. Para la sincronización, la cascada completa de reguladores (regulador de corriente, de
velocidad y de posición) se sincroniza con el ciclo externo. Por eso la modificación del intervalo de sin
cronización sólo es efectiva después de un reset. Si el intervalo de interpolación se debe modificar
mediante el bus CAN, se debe guardar el registro de datos (� capítulo 5.1) y ejecutar un reset
(� capítulo 6) para que el nuevo intervalo de sincronización sea efectivo. El intervalo de sincronización
debe respetarse con exactitud.
Index 60C2h
Name interpolation_time_period
Object Code RECORD
No. of Elements 2

7 Modos de funcionamiento
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 205
Sub-Index 01h
Description ip_time_units
Data Type UINT8
Access rw
Mapping PDO yes
Units según ip_time_index
Value Rangeip_time_index = -3: 1, 2 … 9, 10
ip_time_index = -4: 10, 20 … 90, 100
Default Value --
Sub-Index 02h
Description ip_time_index
Data Type INT8
Access rw
Mapping PDO yes
Units –
Value Range -3, -4
Default Value -3
Valor ip_time_units se indica en
-3 10-3 segundos (ms)
-4 10-4 segundos (0,1 ms)
La modificación del intervalo de sincronización sólo es efectiva después de un reset. Si el
intervalo de interpolación debe modificarse mediante el bus CAN, se debe guardar el
registro de datos y ejecutar un reset.
Objeto 60C3h: interpolation_sync_definitionCon el objeto interpolation_sync_definition se especifica el tipo (synchronize_on_group) y la cantidad
(ip_sync_every_n_event) de telegramas de sincronización por cada intervalo de sincronización. Para la
serie CMMP sólo se puede ajustar el telegrama SYNC estándar y 1 SYNC por cada intervalo.
Index 60C3h
Name interpolation_sync_definition
Object Code ARRAY
No. of Elements 2
Data Type UINT8

7 Modos de funcionamiento
206 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Sub-Index 01h
Description syncronize_on_group
Access rw
Mapping PDO yes
Units –
Value Range 0
Default Value 0
Valor Significado
0 Utilizar telegrama SYNC estándar
Sub-Index 02h
Description ip_sync_every_n_eventAccess rw
Mapping PDO yes
Units –
Value Range 1
Default Value 1
Objeto 60C4h: interpolation_data_configurationMediante el objeto interpolation_data_configuration se puede configurar el tipo (buffer_organisation)
y el tamaño (max_buffer_size, actual_buffer_size) de un buffer eventualmente existente, así como el
acceso al mismo (buffer_position, buffer_clear). Mediante el objeto size_of_data_record se puede leer
el tamaño de un elemento del buffer. Aunque en el tipo de interpolación “Interpolación lineal sin buf
fer” no está disponible ningún buffer, en este caso también es necesario habilitar el acceso a través del
objeto buffer_clear.
Index 60C4h
Name interpolation_data_configuration
Object Code RECORD
No. of Elements 6
Sub-Index 01h
Description max_buffer_size
Data Type UINT32
Access ro
Mapping PDO no
Units –
Value Range 0
Default Value 0

7 Modos de funcionamiento
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 207
Sub-Index 02h
Description actual_size
Data Type UINT32
Access rw
Mapping PDO yes
Units –
Value Range 0 … max_buffer_size
Default Value 0
Sub-Index 03h
Description buffer_organisation
Data Type UINT8
Access rw
Mapping PDO yes
Units –
Value Range 0
Default Value 0
Valor Significado
0 FIFO
Sub-Index 04h
Description buffer_positionData Type UINT16
Access rw
Mapping PDO yes
Units –
Value Range 0
Default Value 0
Sub-Index 05h
Description size_of_data_recordData Type UINT8
Access wo
Mapping PDO yes
Units –
Value Range 2
Default Value 2
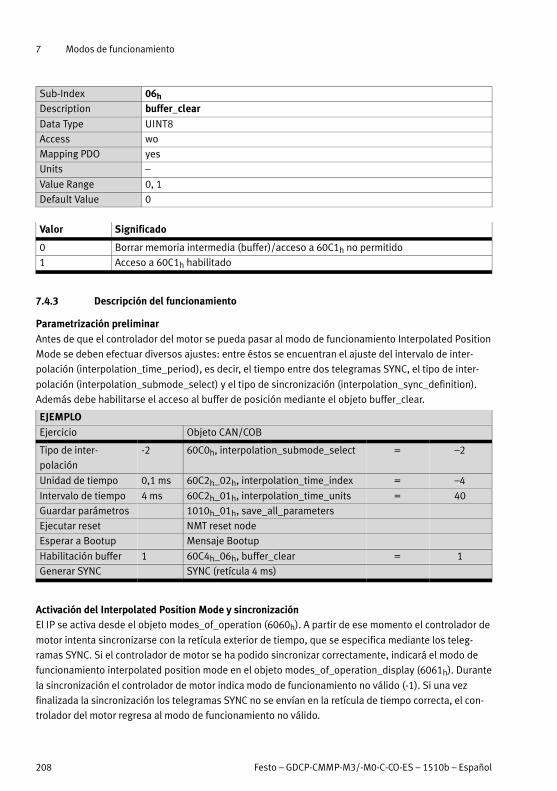
7 Modos de funcionamiento
208 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Sub-Index 06h
Description buffer_clear
Data Type UINT8
Access wo
Mapping PDO yes
Units –
Value Range 0, 1
Default Value 0
Valor Significado
0 Borrar memoria intermedia (buffer)/acceso a 60C1h no permitido
1 Acceso a 60C1h habilitado
7.4.3 Descripción del funcionamiento
Parametrización preliminar
Antes de que el controlador del motor se pueda pasar al modo de funcionamiento Interpolated Position
Mode se deben efectuar diversos ajustes: entre éstos se encuentran el ajuste del intervalo de inter
polación (interpolation_time_period), es decir, el tiempo entre dos telegramas SYNC, el tipo de inter
polación (interpolation_submode_select) y el tipo de sincronización (interpolation_sync_definition).
Además debe habilitarse el acceso al buffer de posición mediante el objeto buffer_clear.
EJEMPLO
Ejercicio Objeto CAN/COB
Tipo de inter
polación
-2 60C0h, interpolation_submode_select = –2
Unidad de tiempo 0,1 ms 60C2h_02h, interpolation_time_index = –4
Intervalo de tiempo 4 ms 60C2h_01h, interpolation_time_units = 40
Guardar parámetros 1010h_01h, save_all_parameters
Ejecutar reset NMT reset node
Esperar a Bootup Mensaje Bootup
Habilitación buffer 1 60C4h_06h, buffer_clear = 1
Generar SYNC SYNC (retícula 4 ms)
Activación del Interpolated Position Mode y sincronizaciónEl IP se activa desde el objeto modes_of_operation (6060h). A partir de ese momento el controlador de
motor intenta sincronizarse con la retícula exterior de tiempo, que se especifica mediante los teleg
ramas SYNC. Si el controlador de motor se ha podido sincronizar correctamente, indicará el modo de
funcionamiento interpolated position mode en el objeto modes_of_operation_display (6061h). Durante
la sincronización el controlador de motor indica modo de funcionamiento no válido (-1). Si una vez
finalizada la sincronización los telegramas SYNC no se envían en la retícula de tiempo correcta, el con
trolador del motor regresa al modo de funcionamiento no válido.

7 Modos de funcionamiento
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 209
Una vez adoptado el modo de funcionamiento puede empezar la transferencia de datos de posición al
accionamiento. Para ello, el control de nivel superior lee primero la posición real actual del regulador
y la escribe cíclicamente como nuevo valor nominal (interpolation_data_record) en el controlador de
motor. Mediante bits de handshake del controlword y del statusword se activa la aceptación de los
datos por el controlador del motor. Al activar los bits enable_ip_mode en controlword el host indica
que debe empezar la evaluación de los datos de posición. Sólo cuando el controlador de motor haya
validado la acción mediante el bit de estado ip_mode_selected en statusword se evaluarán los regis
tros de datos.
En particular la asignación y la secuencia resultantes son las siguientes:
modes_of_operation_display = 7
modes_of_operation = 7
controlword bit 4: enable_ip_mode
controlword bit 12: ip_mode_active
SYNC
Position
1 1 1 1 2 3 4 5
1 … 5 : Definiciones de posiciones
Fig. 7.8 Sincronización y habilitación de datos

7 Modos de funcionamiento
210 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Evento Objeto CAN
Generar mensajes SYNC
Requerimiento del modo de funcionamiento ip: 6060h, modes_of_operation = 07
Esperar a que se haya adoptado el modo de fun
cionamiento
6061h, modes_of_operation_display = 07
Lectura de la posición real actual 6064h, position_actual_value
Escribir de vuelta como nueva posición nominal 60C1h_01h, ip_data_position
Inicio de la interpolación 6040h, controlword, enable_ip_mode
Validación por el controlador de motor 6041h, statusword, ip_mode_active
Modificación de la posición nominal actual según
trayectoria
60C1h_01h, ip_data_position
Una vez finalizado el proceso de desplazamiento sincrónico, al borrar el bit enable_ip_mode se evita
que haya más evaluaciones de valores de posición.
A continuación se puede conmutar a otro modo de funcionamiento si es necesario.
Interrupción de la interpolación en caso de errorSi se interrumpe una interpolación en curso (ip_mode_active activo) por la aparición de un error del
controlador, el accionamiento se comporta inicialmente de la manera especificada para el error corres
pondiente (p. ej., desconexión de la habilitación del regulador y cambio al estado SWITCH_ON_DISAB
LED).
Mediante una nueva sincronización es posible continuar con la interpolación, ya que el controlador de
motor debe ponerse de nuevo en el estado OPERATION_ENABLE y como consecuencia se borra el bit
ip_mode_active.
7.5 Modo de funcionamiento Regulación de la velocidad(Profile Velocity Mode)
7.5.1 Cuadro generalEl funcionamiento con regulación de velocidad (Profile Velocity Mode) contiene las siguientes subfun
ciones:
– Generación de valor nominal por el generador de rampas
– Detección de la velocidad mediante el transductor angular por diferenciación
– Regulación de la velocidad con señales adecuadas de entrada y salida
– Limitación del valor nominal del par (torque_demand_value)
– Supervisión de la velocidad nominal (velocity_actual_value) con la función de ventana / umbral
El significado de los parámetros siguientes está descrito en el capítulo Posicionamiento (Profile
Position Mode): profile_acceleration, profile_deceleration, quick_stop.
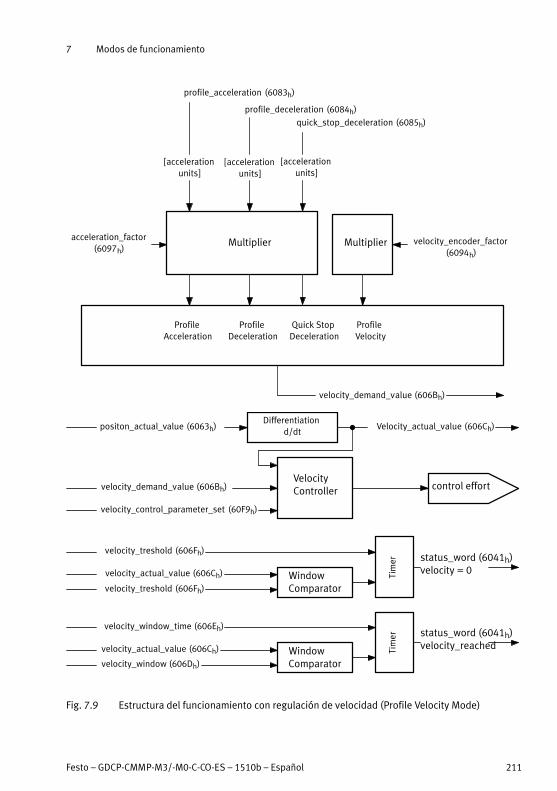
7 Modos de funcionamiento
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 211
[accelerationunits]
Multiplier Multiplier
[accelerationunits]
[accelerationunits]
acceleration_factor(6097h)
Profile Acceleration
Profile Deceleration
Quick Stop Deceleration
velocity_encoder_factor(6094h)
Profile Velocity
quick_stop_deceleration (6085h)
profile_deceleration (6084h)
profile_acceleration (6083h)
velocity_demand_value (606Bh)
positon_actual_value (6063h)Differentiation
d/dtVelocity_actual_value (606Ch)
velocity_demand_value (606Bh)
velocity_control_parameter_set (60F9h)
VelocityController
velocity_actual_value (606Ch) WindowComparatorvelocity_treshold (606Fh)
velocity_treshold (606Fh)
Tim
er status_word (6041h)velocity = 0
velocity_actual_value (606Ch) WindowComparatorvelocity_window (606Dh)
velocity_window_time (606Eh)
Tim
er status_word (6041h)velocity_reached
control effort
Fig. 7.9 Estructura del funcionamiento con regulación de velocidad (Profile Velocity Mode)
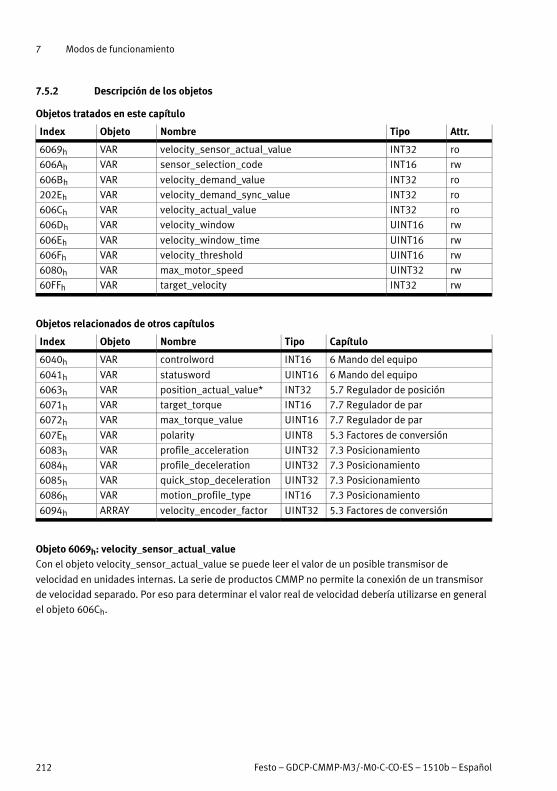
7 Modos de funcionamiento
212 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
7.5.2 Descripción de los objetos
Objetos tratados en este capítulo
Index Objeto Nombre Tipo Attr.
6069h VAR velocity_sensor_actual_value INT32 ro
606Ah VAR sensor_selection_code INT16 rw
606Bh VAR velocity_demand_value INT32 ro
202Eh VAR velocity_demand_sync_value INT32 ro
606Ch VAR velocity_actual_value INT32 ro
606Dh VAR velocity_window UINT16 rw
606Eh VAR velocity_window_time UINT16 rw
606Fh VAR velocity_threshold UINT16 rw
6080h VAR max_motor_speed UINT32 rw
60FFh VAR target_velocity INT32 rw
Objetos relacionados de otros capítulos
Index Objeto Nombre Tipo Capítulo
6040h VAR controlword INT16 6 Mando del equipo
6041h VAR statusword UINT16 6 Mando del equipo
6063h VAR position_actual_value* INT32 5.7 Regulador de posición
6071h VAR target_torque INT16 7.7 Regulador de par
6072h VAR max_torque_value UINT16 7.7 Regulador de par
607Eh VAR polarity UINT8 5.3 Factores de conversión
6083h VAR profile_acceleration UINT32 7.3 Posicionamiento
6084h VAR profile_deceleration UINT32 7.3 Posicionamiento
6085h VAR quick_stop_deceleration UINT32 7.3 Posicionamiento
6086h VAR motion_profile_type INT16 7.3 Posicionamiento
6094h ARRAY velocity_encoder_factor UINT32 5.3 Factores de conversión
Objeto 6069h: velocity_sensor_actual_valueCon el objeto velocity_sensor_actual_value se puede leer el valor de un posible transmisor de
velocidad en unidades internas. La serie de productos CMMP no permite la conexión de un transmisor
de velocidad separado. Por eso para determinar el valor real de velocidad debería utilizarse en general
el objeto 606Ch.
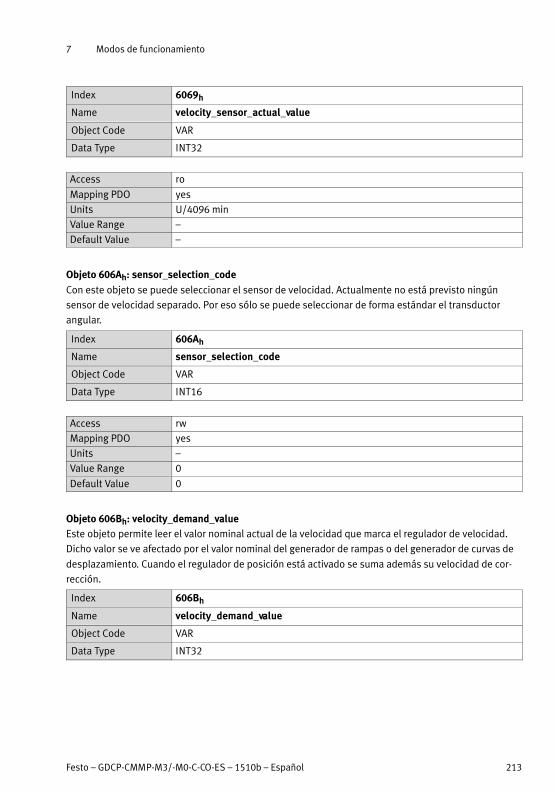
7 Modos de funcionamiento
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 213
Index 6069h
Name velocity_sensor_actual_value
Object Code VAR
Data Type INT32
Access ro
Mapping PDO yes
Units U/4096 min
Value Range –
Default Value –
Objeto 606Ah: sensor_selection_code
Con este objeto se puede seleccionar el sensor de velocidad. Actualmente no está previsto ningún
sensor de velocidad separado. Por eso sólo se puede seleccionar de forma estándar el transductor
angular.
Index 606Ah
Name sensor_selection_code
Object Code VAR
Data Type INT16
Access rw
Mapping PDO yes
Units –
Value Range 0
Default Value 0
Objeto 606Bh: velocity_demand_valueEste objeto permite leer el valor nominal actual de la velocidad que marca el regulador de velocidad.
Dicho valor se ve afectado por el valor nominal del generador de rampas o del generador de curvas de
desplazamiento. Cuando el regulador de posición está activado se suma además su velocidad de cor
rección.
Index 606Bh
Name velocity_demand_value
Object Code VAR
Data Type INT32

7 Modos de funcionamiento
214 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Access ro
Mapping PDO yes
Units speed units
Value Range –
Default Value –
Objeto 202Eh: velocity_demand_sync_valueCon este objeto se puede leer la velocidad nominal del transmisor de sincronización. Se define a través
del objeto 2022h synchronization_encoder_select (cap. 5.11). Este objeto se indica en unidades
definidas por el usuario.
Index 202Eh
Name velocity_demand_sync_value
Object Code VAR
Data Type INT32
Access ro
Mapping PDO no
Units velocity units
Value Range –
Default Value –
Objeto 606Ch: velocity_actual_valueCon el objeto velocity_actual_value puede leerse el valor real de velocidad.
Index 606Ch
Name velocity_actual_value
Object Code VAR
Data Type INT32
Access ro
Mapping PDO yes
Units speed units
Value Range –
Default Value –

7 Modos de funcionamiento
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 215
Objeto 2074h: velocity_actual_value_filteredCon el objeto velocity_actual_value_filtered se puede leer un valor real de velocidad filtrado que
debería utilizarse únicamente para fines de visualización.
En oposición a velocity_actual_value, velocity_actual_value_filtered no se utiliza para la regulación
sino para la protección antigiro del regulador. La constante de tiempo de filtro se puede ajustar a través
del objeto 2073h (velocity_display_filter_time). � Objeto 2073h: velocity_display_filter_time
Index 2074h
Name velocity_actual_value_filtered
Object Code VAR
Data Type INT32
Access ro
Mapping PDO yes
Units speed units
Value Range –
Default Value –
Filterinternal velocity value
velocity_display_filter_time (2073h)
velocity_control_filter_time (60F9h_04h)
Filter
velocity_actual_value (606Ch) [speed units]
velocity_actual_value_filtered(2074h)
[speed units]
Fig. 7.10 Determinación de velocity_actual_value y velocity_actual_value_filtered

7 Modos de funcionamiento
216 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Objeto 606Dh: velocity_windowEl objeto velocity_window sirve para ajustar el comparador de ventanas. Éste compara el valor real de
velocidad con la velocidad final especificada (objeto 60FFh: target_velocity). Si la diferencia es menor
de lo aquí indicado por una cierta duración, entonces se activa el bit 10 target_reached en el objeto
statusword. � también: objeto 606Eh (velocity_window_time).
Index 606Dh
Name velocity_window
Object Code VAR
Data Type UINT16
Access rw
Mapping PDO yes
Units speed units
Value Range 0 … 65536 min-1
Default Value 4 min-1
Objeto 606Eh: velocity_window_timeEl objeto velocity_window_time, junto con el objeto 606Dh: velocity_window, sirve para ajustar el com
parador de ventanas. La velocidad debe encontrarse durante el tiempo aquí especificado dentro de la
velocity_window para que el bit 10 target_reached se active en el objeto statusword.
Index 606Eh
Name velocity_window_time
Object Code VAR
Data Type UINT16
Access rw
Mapping PDO yes
Units ms
Value Range 0 … 4999
Default Value 0
Objeto 606Fh: velocity_threshold
El objeto velocity_threshold indica a partir de qué valor real de velocidad el accionamiento se con
sidera detenido. Si el accionamiento sobrepasa el valor de velocidad especificado aquí durante un
período determinado, el bit 12 (velocity = 0) se borra en el statusword. El período de tiempo se deter
mina mediante el objeto velocity_threshold_time.
Index 606Fh
Name velocity_threshold
Object Code VAR
Data Type UINT16
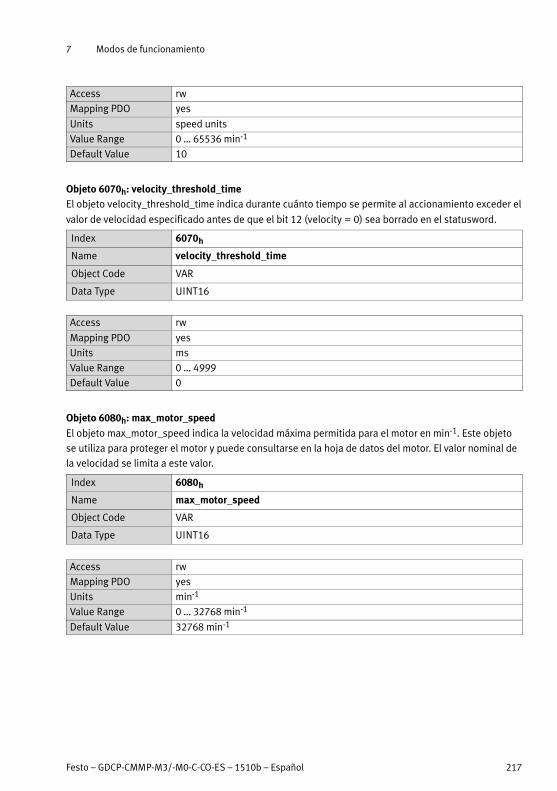
7 Modos de funcionamiento
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 217
Access rw
Mapping PDO yes
Units speed units
Value Range 0 … 65536 min-1
Default Value 10
Objeto 6070h: velocity_threshold_timeEl objeto velocity_threshold_time indica durante cuánto tiempo se permite al accionamiento exceder el
valor de velocidad especificado antes de que el bit 12 (velocity = 0) sea borrado en el statusword.
Index 6070h
Name velocity_threshold_time
Object Code VAR
Data Type UINT16
Access rw
Mapping PDO yes
Units ms
Value Range 0 … 4999
Default Value 0
Objeto 6080h: max_motor_speed
El objeto max_motor_speed indica la velocidad máxima permitida para el motor en min-1. Este objeto
se utiliza para proteger el motor y puede consultarse en la hoja de datos del motor. El valor nominal de
la velocidad se limita a este valor.
Index 6080h
Name max_motor_speed
Object Code VAR
Data Type UINT16
Access rw
Mapping PDO yes
Units min-1
Value Range 0 … 32768 min-1
Default Value 32768 min-1

7 Modos de funcionamiento
218 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Objeto 60FFh: target_velocityEl objeto target_velocity es la especificación del valor nominal para el generador de rampas.
Index 60FFh
Name target_velocity
Object Code VAR
Data Type INT32
Access rw
Mapping PDO yes
Units speed units
Value Range –
Default Value –
7.6 Rampas de velocidad
Si se escoge como modes_of_operation profile_velocity_mode, la rampa de valor nominal también se
activa por principio. De esta manera, mediante los objetos profile_acceleration y profile_deceleration
es posible limitar un cambio del valor nominal en etapa a una determinada modificación de velocidad
por tiempo. El regulador permite indicar diferentes aceleraciones para frenado y aceleraciones y adic
ionalmente distinguir entre velocidad positiva y negativa. La siguiente figura muestra un ejemplo de
este comportamiento:
t
V
Entrada del generador de rampas
Salida del generador de rampas
velocity_acceleration_pos (2090h_02h)
velocity_deceleration_pos (2090h_03h)
velocity_acceleration_neg (2090h_04h)
velocity_deceleration_neg (2090h_05h)
Fig. 7.11 Rampas de velocidad

7 Modos de funcionamiento
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 219
Con el grupo de objetos velocity_ramps se pueden parametrizar estas 4 aceleraciones individualmente.
Es preciso tener en cuenta que los objetos profile_acceleration y profile_deceleration modifican las
mismas aceleraciones internas que las velocity_ramps. Si se escribe la profile_acceleration, se
modificarán conjuntamente velocity_acceleration_pos y velocity_ acceleration_neg; si se escribe la
profile_deceleration, se modificarán conjuntamente velocity_acceleration_pos y
velocity_acceleration_neg. Con el objeto velocity_ramps_enable se puede determinar si los valores
nominales se guían por el generador de rampas o no.
Index 2090h
Name velocity_ramps
Object Code RECORD
No. of Elements 5
Sub-Index 01h
Description velocity_ramps_enableData Type UINT8
Access rw
Mapping PDO no
Units –
Value Range0: Valor nominal NO obtenido a través del generador de rampas
1: Valor nominal obtenido a través del generador de rampas
Default Value 1
Sub-Index 02h
Description velocity_acceleration_posData Type INT32
Access rw
Mapping PDO no
Units acceleration units
Value Range –
Default Value 14 100 min-1/s
Sub-Index 03h
Description velocity_deceleration_posData Type INT32
Access rw
Mapping PDO no
Units acceleration units
Value Range –
Default Value 14 100 min-1/s
7 Modos de funcionamiento
220 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Sub-Index 04h
Description velocity_acceleration_neg
Data Type INT32
Access rw
Mapping PDO no
Units acceleration units
Value Range –
Default Value 14 100 min-1/s
Sub-Index 05h
Description velocity_deceleration_neg
Data Type INT32
Access rw
Mapping PDO no
Units acceleration units
Value Range –
Default Value 14 100 min-1/s
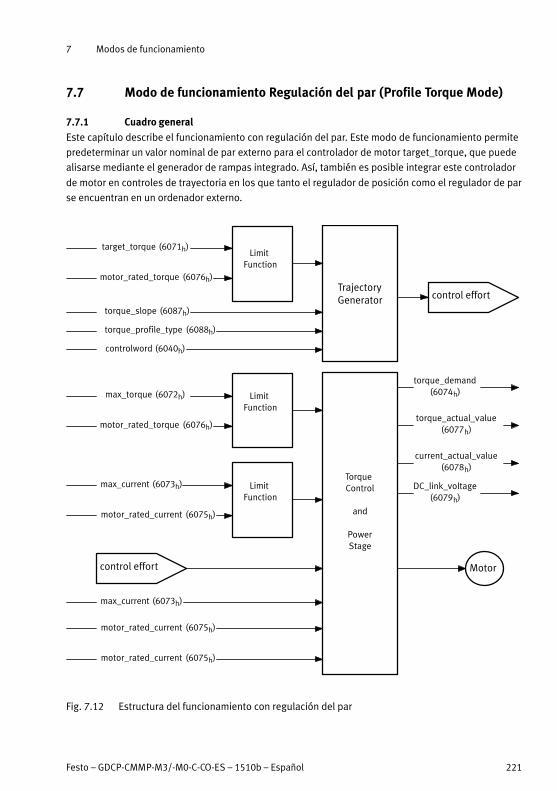
7 Modos de funcionamiento
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 221
7.7 Modo de funcionamiento Regulación del par (Profile Torque Mode)
7.7.1 Cuadro general
Este capítulo describe el funcionamiento con regulación del par. Este modo de funcionamiento permite
predeterminar un valor nominal de par externo para el controlador de motor target_torque, que puede
alisarse mediante el generador de rampas integrado. Así, también es posible integrar este controlador
de motor en controles de trayectoria en los que tanto el regulador de posición como el regulador de par
se encuentran en un ordenador externo.
target_torque (6071h)Limit
Function
torque_profile_type (6088h)
controlword (6040h)
TrajectoryGenerator control effort
torque_slope (6087h)
motor_rated_torque (6076h)
max_torque (6072h)
motor_rated_torque (6076h)
Limit Function
max_current (6073h)
motor_rated_current (6075h)
Limit Function
control effort
max_current (6073h)
motor_rated_current (6075h)
motor_rated_current (6075h)
Torque Control
and
PowerStage
current_actual_value(6078h)
torque_actual_value(6077h)
torque_demand(6074h)
DC_link_voltage(6079h)
Motor
Fig. 7.12 Estructura del funcionamiento con regulación del par

7 Modos de funcionamiento
222 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Para el generador de rampas deben especificarse los parámetros pendiente de la rampa torque_slope
y forma de la rampa torque_profile_type.
Si en controlword se activa el bit 8 halt, el generador de rampas reduce el par de giro hasta cero.
Asimismo, al borrar el bit 8 el generador aumenta de nuevo el par hasta el valor nominaltarget_torque.
En ambos casos el generador de rampas tiene en cuenta la pendiente de la rampa torque_slope y la
forma de la rampa torque_profile_type.
Todas las definiciones de este documento son aplicables a motores giratorios. Si se utilizan motores
lineales, todos los objetos de “ar de giro” deben referirse a una “fuerza” en lugar del par. Para sim
plificar, los objetos no están representados dos veces y sus nombres no se deberían modificar.
Los modos de funcionamiento de posicionamiento (Profile Position Mode) y regulación de velocidad
(Profile Velocity Mode) necesitan el regulador del para para poder funcionar. Por eso siempre es
necesario parametrizarlo.
7.7.2 Descripción de los objetos
Objetos tratados en este capítulo
Index Objeto Nombre Tipo Attr.
6071h VAR target_torque INT16 rw
6072h VAR max_torque UINT16 rw
6074h VAR torque_demand_value INT16 ro
6076h VAR motor_rated_torque UINT32 rw
6077h VAR torque_actual_value INT16 ro
6078h VAR current_actual_value INT16 ro
6079h VAR DC_link_circuit_voltage UINT32 ro
6087h VAR torque_slope UINT32 rw
6088h VAR torque_profile_type INT16 rw
60F7h RECORD power_stage_parameters rw
60F6h RECORD torque_control_parameters rw
Objetos relacionados de otros capítulos
Index Objeto Nombre Tipo Capítulo
6040h VAR controlword INT16 6 Mando del equipo (Device Control)
60F9h RECORD motor_parameters 5.5 Regulador de corriente y adaptación de motor
6075h VAR motor_rated_
current
UINT32 5.5 Regulador de corriente y adaptación de motor
6073h VAR max_current UINT16 5.5 Regulador de corriente y adaptación de motor
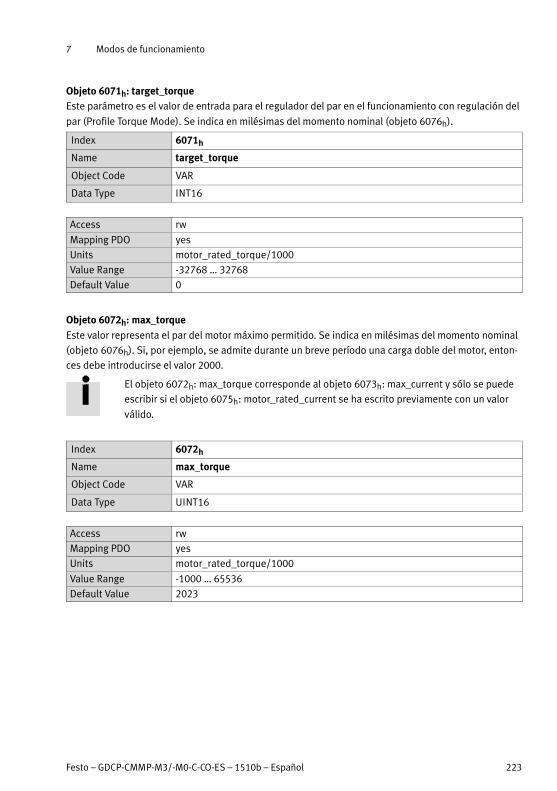
7 Modos de funcionamiento
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 223
Objeto 6071h: target_torqueEste parámetro es el valor de entrada para el regulador del par en el funcionamiento con regulación del
par (Profile Torque Mode). Se indica en milésimas del momento nominal (objeto 6076h).
Index 6071h
Name target_torque
Object Code VAR
Data Type INT16
Access rw
Mapping PDO yes
Units motor_rated_torque/1000
Value Range -32768 … 32768
Default Value 0
Objeto 6072h: max_torque
Este valor representa el par del motor máximo permitido. Se indica en milésimas del momento nominal
(objeto 6076h). Si, por ejemplo, se admite durante un breve período una carga doble del motor, enton
ces debe introducirse el valor 2000.
El objeto 6072h: max_torque corresponde al objeto 6073h: max_current y sólo se puede
escribir si el objeto 6075h: motor_rated_current se ha escrito previamente con un valor
válido.
Index 6072h
Name max_torque
Object Code VAR
Data Type UINT16
Access rw
Mapping PDO yes
Units motor_rated_torque/1000
Value Range -1000 … 65536
Default Value 2023
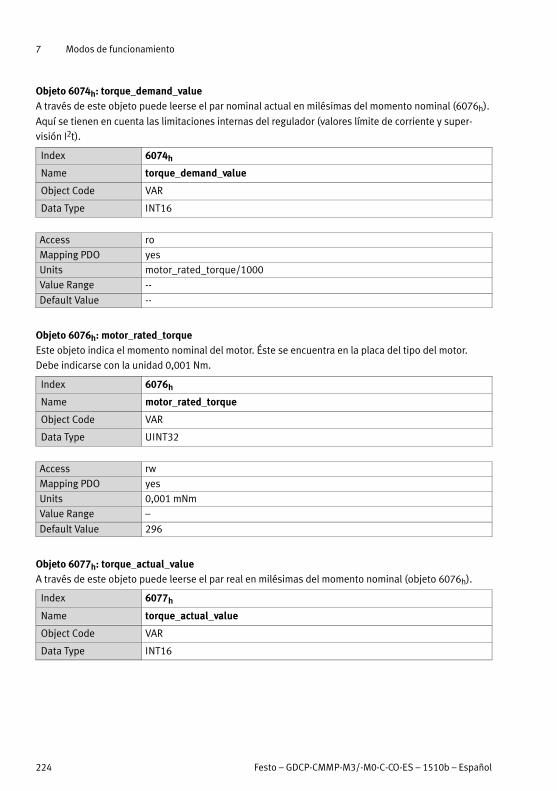
7 Modos de funcionamiento
224 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Objeto 6074h: torque_demand_valueA través de este objeto puede leerse el par nominal actual en milésimas del momento nominal (6076h).
Aquí se tienen en cuenta las limitaciones internas del regulador (valores límite de corriente y super
visión I2t).
Index 6074h
Name torque_demand_value
Object Code VAR
Data Type INT16
Access ro
Mapping PDO yes
Units motor_rated_torque/1000
Value Range --
Default Value --
Objeto 6076h: motor_rated_torqueEste objeto indica el momento nominal del motor. Éste se encuentra en la placa del tipo del motor.
Debe indicarse con la unidad 0,001 Nm.
Index 6076h
Name motor_rated_torque
Object Code VAR
Data Type UINT32
Access rw
Mapping PDO yes
Units 0,001 mNm
Value Range –
Default Value 296
Objeto 6077h: torque_actual_valueA través de este objeto puede leerse el par real en milésimas del momento nominal (objeto 6076h).
Index 6077h
Name torque_actual_value
Object Code VAR
Data Type INT16

7 Modos de funcionamiento
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 225
Access ro
Mapping PDO yes
Units motor_rated_torque/1000
Value Range –
Default Value –
Objeto 6078h: current_actual_valueA través de este objeto puede leerse el valor real de corriente del motor en milésimas del momento
nominal (objeto 6075h).
Index 6078h
Name current_actual_value
Object Code VAR
Data Type INT16
Access ro
Mapping PDO yes
Units motor_rated_current/1000
Value Range –
Default Value –
Objeto 6079h: dc_link_circuit_voltage
Con este objeto se puede leer la tensión del circuito intermedio del regulador. La tensión se indica en
milivoltios.
Index 6079h
Name dc_link_circuit_voltage
Object Code VAR
Data Type UINT32
Access ro
Mapping PDO yes
Units mV
Value Range –
Default Value –

7 Modos de funcionamiento
226 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Objeto 6087h: torque_slopeEste parámetro describe la velocidad de modificación de la rampa de valor nominal. Debe indicarse en
milésimas del momento nominal por segundo. Por ejemplo, el valor nominal de par target_torque
aumenta de 0 Nm al valor motor_rated_torque Si el valor de salida de la rampa de par intermedia debe
alcanzar dicho valor en un segundo, entonces se ha de introducir el valor 1000 en este objeto.
Index 6087h
Name torque_slope
Object Code VAR
Data Type UINT32
Access rw
Mapping PDO yes
Units motor_rated_torque/1000 s
Value Range –
Default Value 0E310F94h
Objeto 6088h: torque_profile_typeCon el objeto torque_profile_type se especifica con qué forma de curva se debe realizar un salto del
valor nominal. Actualmente en este regulador sólo está implementada la rampa lineal, de modo que en
este objeto sólo se puede introducir el valor 0.
Index 6088h
Name torque_profile_type
Object Code VAR
Data Type INT16
Access rw
Mapping PDO yes
Units –
Value Range 0
Default Value 0
Valor Significado
0 Rampa lineal
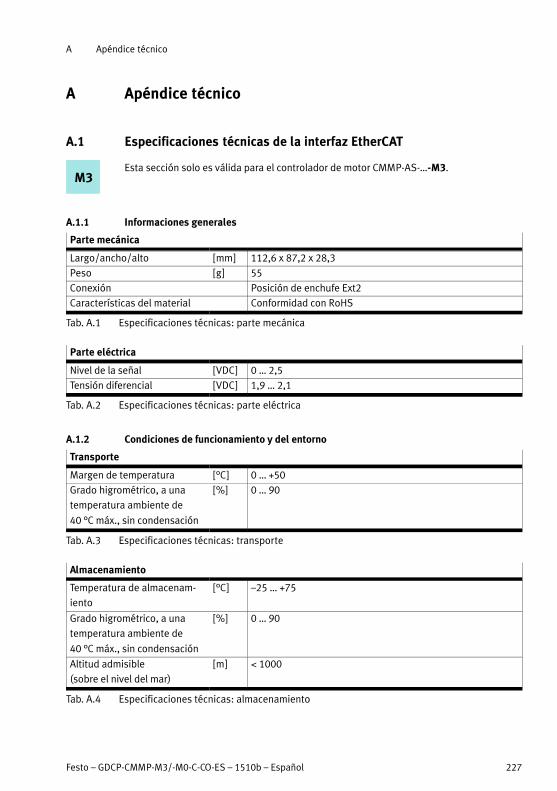
A Apéndice técnico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 227
A Apéndice técnico
A.1 Especificaciones técnicas de la interfaz EtherCAT
M3Esta sección solo es válida para el controlador de motor CMMP-AS-…-M3.
A.1.1 Informaciones generales
Parte mecánica
Largo/ancho/alto [mm] 112,6 x 87,2 x 28,3
Peso [g] 55
Conexión Posición de enchufe Ext2
Características del material Conformidad con RoHS
Tab. A.1 Especificaciones técnicas: parte mecánica
Parte eléctrica
Nivel de la señal [VDC] 0 … 2,5
Tensión diferencial [VDC] 1,9 … 2,1
Tab. A.2 Especificaciones técnicas: parte eléctrica
A.1.2 Condiciones de funcionamiento y del entorno
Transporte
Margen de temperatura [°C] 0 … +50
Grado higrométrico, a una
temperatura ambiente de
40 °C máx., sin condensación
[%] 0 … 90
Tab. A.3 Especificaciones técnicas: transporte
Almacenamiento
Temperatura de almacenam
iento
[°C] –25 … +75
Grado higrométrico, a una
temperatura ambiente de
40 °C máx., sin condensación
[%] 0 … 90
Altitud admisible
(sobre el nivel del mar)
[m] 1000
Tab. A.4 Especificaciones técnicas: almacenamiento

B Mensajes de diagnóstico
228 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
B Mensajes de diagnósticoCuando se produce un error, el controlador de motor CMMP‐AS‐...‐M3/-M0 muestra cíclicamente un
mensaje de diagnosis en el visualizador digital de siete segmentos. Un mensaje de error se compone de
una E (de Error), un índice principal y un subíndice como, p. ej.: - E 0 1 0 -.
Las advertencias tienen el mismo número que un mensaje de error. Para diferenciarlas de estos, en las
advertencias aparece un guión antes y después del número, p. ej.: - 1 7 0 -.
B.1 Explicación de los mensajes de diagnosis
La tabla siguiente resume el significado de los mensajes de diagnóstico y las medidas que se deben
tomar en cada caso:
Conceptos Significado
N.° Índice principal (grupo de errores) y subíndice del mensaje de diagnosis.
Indicación en la pantalla, en FCT o en la memoria de diagnosis a través de FHPP.
Código La columna Código contiene el código de error (Hex) por CiA 301.
Mensaje Mensaje que se muestra en el FCT.
Causa Causas posibles del mensaje.
Medida Medidas que el usuario debe adoptar.
Reacción La columna Reacción contiene la reacción ante errores (ajuste predeterminado,
configurable parcialmente):
– PS off (desconectar paso de salida),
– MCStop (parada rápida con corriente máxima),
– QStop (parada rápida con rampa parametrizada),
– Warn (advertencia),
– Ignore (ningún mensaje, solo entrada en la memoria de diagnosis),
– NoLog (ningún mensaje y ninguna entrada en la memoria de diagnosis).
Tab. B.1 Explicación de los mensajes de diagnosis
En la sección B.2 hallará los Errorcodes conforme a CiA301/402 con asignación a los números de error
de los mensajes de diagnosis.
Hallará una lista completa de los mensajes de diagnosis conforme a las versiones de firmware existen
tes en el momento de publicación del presente documento en la sección B.3.

B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 229
B.2 Errorcodes a través de CiA 301/402
Mensajes de diagnosisCódigo N.° Mensaje Reacción
2311h 31-1 Servorregulador I²t Configurable
2312h 31-0 Motor I²t Configurable
2313h 31-2 PCF I²t Configurable
2314h 31-3 Resistencia de frenado I²t Configurable
2320h 06-0 Fase final, cortocircuito PS off
06-1 Sobrecorriente chopper de frenado PS off
3210h 07-0 Sobretensión en el circuito intermedio PS off
3220h 02-0 Baja tensión en el circuito intermedio Configurable
3280h 32-0 Tiempo de carga de circuito intermedio sobrepasado Configurable
3281h 32-1 Subtensión para PFC activo Configurable
3282h 32-5 Sobrecarga chopper de frenado. No ha podido descargarse elcircuito intermedio
Configurable
3283h 32-6 Tiempo de descarga de circuito intermedio sobrepasado Configurable
3284h 32-7 No hay alimentación de potencia para desbloquear el regulador
Configurable
3285h 32-8 Fallo en la alimentación de potencia para desbloquear el regulador
QStop
3286h 32-9 Fallo de fase QStop
4210h 04-0 Exceso de temperatura de la unidad de potencia Configurable
4280h 04-1 Sobretemperatura en el circuito intermedio Configurable
4310h 03-0 Exceso de temperatura de motor analógico QStop
03-1 Exceso de temperatura de motor digital Configurable
03-2 Exceso de temperatura de motor analógico: rotura de hilo Configurable
03-3 Exceso de temperatura de motor analógico: cortocircuito Configurable
5080h 90-0 Componente de hardware no disponible (SRAM) PS off
90-2 Error durante la carga de FPGA PS off
90-3 Error durante inicio de SD-ADU PS off
90-4 Error de sincronización de SD-ADU tras inicio PS off
90-5 SD-ADU no sincrónica PS off
90-6 IRQ0 (regulador de corriente): error de iniciador PS off
90-9 Firmware de DEBUG (depuración) cargado PS off
5114h 05-0 Fallo de tensión interna 1 PS off
5115h 05-1 Fallo de tensión interna 2 PS off
5116h 05-2 Fallo de alimentación del excitador PS off
5280h 21-0 Error 1 medición de corriente U PS off
5281h 21-1 Error 1 medición de corriente V PS off
5282h 21-2 Error 2 medición de corriente U PS off
5283h 21-3 Error 2 medición de corriente V PS off
5410h 05-3 Subtensión en I/O dig. PS off

B Mensajes de diagnóstico
230 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Mensajes de diagnosis
Código ReacciónMensajeN.°
05-4 Sobrecorriente en I/O dig. PS off
5580h 26-0 Falta conjunto de parámetros de usuario PS off
5581h 26-1 Error suma de prueba PS off
5582h 26-2 Flash: error durante la escritura PS off
5583h 26-3 Flash: error al borrar PS off
5584h 26-4 Flash: error en memoria flash interna PS off
5585h 26-5 Faltan datos de calibración PS off
5586h 26-6 Faltan conjuntos de datos de posición de usuario PS off
6000h 91-0 Fallo interno de inicialización PS off
6080h 25-0 Tipo de equipo no válido PS off
6081h 25-1 Tipo de equipo no compatible PS off
6082h 25-2 Revisión de hardware incompatible PS off
6083h 25-3 Funcionamiento limitado del equipo. PS off
6180h 01-0 Stack overflow PS off
6181h 16-0 Ejecución defectuosa del programa PS off
6182h 16-1 Interrupción no autorizada PS off
6183h 16-3 Estado inesperado PS off
6185h 15-0 División entre 0 PS off
6186h 15-1 Sobrepasamiento de margen PS off
6187h 16-2 Error de inicialización PS off
6320h 36-0 El parámetro ha sido limitado Configurable
36-1 No se ha aceptado el parámetro Configurable
6380h 30-0 Error interno de conversión PS off
7380h 08-0 Error del transductor angular del resolver Configurable
7382h 08-2 Error señales de pista Z0 encoder incremental Configurable
7383h 08-3 Error señales de pista Z1 encoder incremental Configurable
7384h 08-4 Error señales de pista transmisor incremental digital [X2B] Configurable
7385h 08-5 Error de señales de transmisor Hall de transmisor incremental Configurable
7386h 08-6 Fallo de comunicación del encoder Configurable
7387h 08-7 Amplitud errónea de las señales de las pistas incrementales[X10]
Configurable
7388h 08-8 Error interno del transductor angular Configurable
7389h 08-9 Transductor angular en [X2B] no compatible Configurable
73A1h 09-0 Antiguo conjunto de parámetros de encoder Configurable
73A2h 09-1 No se puede descodificar el conjunto de parámetros del encoder
Configurable
73A3h 09-2 Versión desconocida de conjunto de parámetros de transductor angular
Configurable
73A4h 09-3 Estructura de datos defectuosa de conjunto de parámetros deencoder
Configurable

B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 231
Mensajes de diagnosis
Código ReacciónMensajeN.°
73A5h 09-7 EEPROM de encoder con protección de escritura Configurable
73A6h 09-9 EEPROM del encoder demasiado pequeña Configurable
8081h 43-0 Detector de final de carrera: valor nominal negativo bloqueado Configurable
8082h 43-1 Detector de final de carrera: valor nominal positivo bloqueado Configurable
8083h 43-2 Detector de final de carrera; posicionamiento suprimido Configurable
8120h 12-1 CAN: fallo de comunicación, bus DESCONECTADO Configurable
8180h 12-0 CAN: número de nodo por duplicado Configurable
8181h 12-2 CAN: fallos de comunicación durante el envío Configurable
8182h 12-3 CAN: fallos de comunicación durante la recepción Configurable
8480h 35-0 Protección antigiro del motor lineal Configurable
8611h 17-0 Supervisión de errores de seguimiento Configurable
17-1 Supervisión de diferencia entre transmisores Configurable
27-0 Umbral de aviso de error de seguimiento Configurable
8612h 40-0 Se ha alcanzado el detector de final de carrera por softwarenegativo
Configurable
40-1 Se ha alcanzado el detector de final de carrera por softwarepositivo
Configurable
40-2 Posición de destino tras el detector de final de carrera porsoftware negativo
Configurable
40-3 Posición de destino tras el detector de final de carrera porsoftware positivo
Configurable
8680h 42-0 Posicionamiento: posicionamiento de conexión inexistente:parada
Configurable
8681h 42-1 Posicionamiento: no está permitido invertir el sentido de giro:parada
Configurable
8682h 42-2 Posicionamiento: no está permitido invertir el sentido de girodespués de una pausa
Configurable
8780h 34-0 No hay sincronización a través del bus de campo Configurable
8781h 34-1 Fallo de sincronización del bus de campo Configurable
8A80h 11-0 Error al iniciarse el recorrido de referencia Configurable
8A81h 11-1 Error en el recorrido de referencia Configurable
8A82h 11-2 Recorrido de referencia: no hay impulso de puesta a ceroválido
Configurable
8A83h 11-3 Recorrido de referencia: tiempo sobrepasado Configurable
8A84h 11-4 Recorrido de referencia: detector de final de carrera incorrecto / no válido
Configurable
8A85h 11-5 Recorrido de referencia: I²t / error de seguimiento Configurable
8A86h 11-6 Recorrido de referencia: final del recorrido de búsqueda Configurable
8A87h 33-0 Error de seguimiento de la emulación de encoder Configurable
F080h 80-0 Desbordamiento de regulador de corriente, IRQ PS off
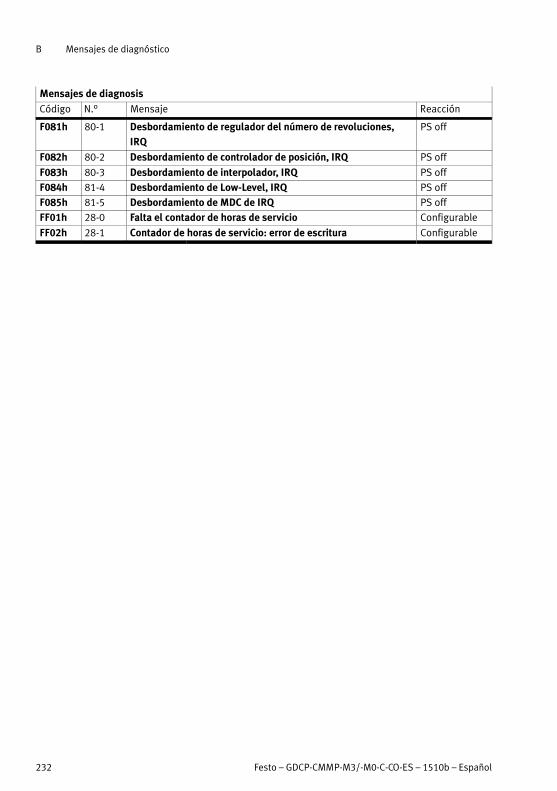
B Mensajes de diagnóstico
232 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Mensajes de diagnosis
Código ReacciónMensajeN.°
F081h 80-1 Desbordamiento de regulador del número de revoluciones,IRQ
PS off
F082h 80-2 Desbordamiento de controlador de posición, IRQ PS off
F083h 80-3 Desbordamiento de interpolador, IRQ PS off
F084h 81-4 Desbordamiento de Low-Level, IRQ PS off
F085h 81-5 Desbordamiento de MDC de IRQ PS off
FF01h 28-0 Falta el contador de horas de servicio Configurable
FF02h 28-1 Contador de horas de servicio: error de escritura Configurable
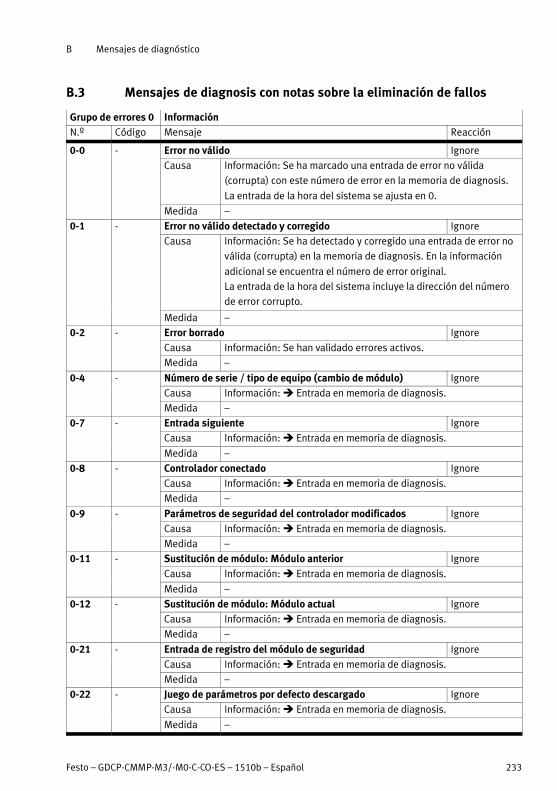
B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 233
B.3 Mensajes de diagnosis con notas sobre la eliminación de fallos
Grupo de errores 0 InformaciónN.º Código Mensaje Reacción
0-0 - Error no válido Ignore
Causa Información: Se ha marcado una entrada de error no válida
(corrupta) con este número de error en la memoria de diagnosis.
La entrada de la hora del sistema se ajusta en 0.
Medida –
0-1 - Error no válido detectado y corregido Ignore
Causa Información: Se ha detectado y corregido una entrada de error no
válida (corrupta) en la memoria de diagnosis. En la información
adicional se encuentra el número de error original.
La entrada de la hora del sistema incluye la dirección del número
de error corrupto.
Medida –
0-2 - Error borrado Ignore
Causa Información: Se han validado errores activos.
Medida –
0-4 - Número de serie / tipo de equipo (cambio de módulo) Ignore
Causa Información: � Entrada en memoria de diagnosis.
Medida –
0-7 - Entrada siguiente Ignore
Causa Información: � Entrada en memoria de diagnosis.
Medida –
0-8 - Controlador conectado Ignore
Causa Información: � Entrada en memoria de diagnosis.
Medida –
0-9 - Parámetros de seguridad del controlador modificados Ignore
Causa Información: � Entrada en memoria de diagnosis.
Medida –
0-11 - Sustitución de módulo: Módulo anterior Ignore
Causa Información: � Entrada en memoria de diagnosis.
Medida –
0-12 - Sustitución de módulo: Módulo actual Ignore
Causa Información: � Entrada en memoria de diagnosis.
Medida –
0-21 - Entrada de registro del módulo de seguridad Ignore
Causa Información: � Entrada en memoria de diagnosis.
Medida –
0-22 - Juego de parámetros por defecto descargado Ignore
Causa Información: � Entrada en memoria de diagnosis.
Medida –

B Mensajes de diagnóstico
234 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 1 Stack overflowN.º Código Mensaje Reacción
1-0 6180 h Stack overflow PSoff
Causa – ¿Firmware incorrecto?
– Gran carga de procesamiento esporádica debido a un tiempo
de ciclo demasiado breve y a procesos de gran consumo
(almacenamiento de conjuntos de parámetros, etc.).
Medida � Cargar un firmware autorizado.
� Reducir la carga de cálculo.
� Póngase en contacto con el soporte técnico.
Grupo de errores 2 Subtensión en circuito intermedio
N.º Código Mensaje Reacción
2-0 3220 h Subtensión en circuito intermedio ConfigurableCausa La tensión del circuito intermedio desciende por debajo del
umbral parametrizado (� Información adicional).¿Se ha ajustado una prioridad de error muy alta?
Medida � Descarga rápida a causa de alimentación de red desconectada.� Comprobar la alimentación de potencia.� Acoplar los circuitos intermedios si es técnicamente permisible.� Comprobar (medir) tensión del circuito intermedio.� Comprobar supervisión de subtensión (valor umbral).
Informaciónadicional
Información adicional en PNU 203/213:16 bits superiores: Número de estado de la máquina interna deestado16 bits inferiores: Tensión del circuito intermedio (escaladointerno aprox. 17,1 digit/V).
Grupo de errores 3 Exceso de temperatura en motorN.º Código Mensaje Reacción
3-0 4310 h Exceso de temperatura en motor analógico QStopCausa Motor sobrecargado, temperatura demasiado alta.
– ¿Motor demasiado caliente?– ¿Sensor incorrecto?– ¿Sensor defectuoso?– ¿Rotura de cable?
Medida � Comprobar la parametrización (regulador de corriente, valoreslímite de corriente).
� Comprobar la parametrización del sensor o su curvacaracterística.
Si se dan errores incluso cuando el sensor está puenteado:Aparato averiado.

B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 235
Grupo de errores 3 Exceso de temperatura en motor
N.º ReacciónMensajeCódigo
3-1 4310 h Exceso de temperatura en motor digital ConfigurableCausa – Motor sobrecargado, temperatura demasiado alta.
– ¿Se ha parametrizado el sensor adecuado o su curvacaracterística?
– ¿Sensor defectuoso?Medida � Comprobar la parametrización (regulador de corriente, valores
límite de corriente).� Comprobar la parametrización del sensor o su curva
característica.Si se dan errores incluso cuando el sensor está puenteado:Aparato averiado.
3-2 4310 h Exceso de temperatura en motor analógico: Rotura del hilo ConfigurableCausa El valor medido de las resistencias está por encima del umbral
para la detección de rotura de cables.Medida � Comprobar que los cables de conexión del sensor de
temperatura no estén rotos.� Comprobar la parametrización (valor umbral) de la detección
de rotura de cables.3-3 4310 h Exceso de temperatura en motor analógico: Cortocircuito Configurable
Causa El valor medido de las resistencias está por debajo del umbralpara la detección de cortocircuito.
Medida � Comprobar que los cables de conexión del sensor detemperatura no estén rotos.
� Comprobar la parametrización (valor umbral) de la detecciónde cortocircuito.
Grupo de errores 4 Exceso de temperatura en unidad de potencia/circuito intermedioN.º Código Mensaje Reacción
4-0 4210 h Exceso de temperatura en unidad de potencia Configurable
Causa Aparato sobrecalentado
– ¿Indicación de temperatura plausible?
– ¿Ventilador defectuoso?
– ¿Equipo sobrecargado?
Medida � Comprobar las condiciones de montaje. ¿Están sucios los
filtros de los ventiladores del armario de maniobra?
� Comprobar la configuración del actuador (por si hay
sobrecarga en el funcionamiento permanente).
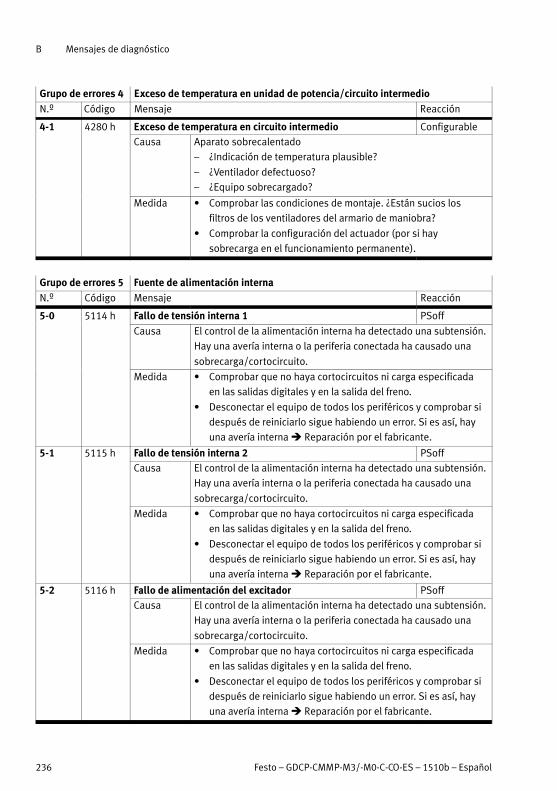
B Mensajes de diagnóstico
236 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 4 Exceso de temperatura en unidad de potencia/circuito intermedio
N.º ReacciónMensajeCódigo
4-1 4280 h Exceso de temperatura en circuito intermedio Configurable
Causa Aparato sobrecalentado
– ¿Indicación de temperatura plausible?
– ¿Ventilador defectuoso?
– ¿Equipo sobrecargado?
Medida � Comprobar las condiciones de montaje. ¿Están sucios los
filtros de los ventiladores del armario de maniobra?
� Comprobar la configuración del actuador (por si hay
sobrecarga en el funcionamiento permanente).
Grupo de errores 5 Fuente de alimentación interna
N.º Código Mensaje Reacción
5-0 5114 h Fallo de tensión interna 1 PSoff
Causa El control de la alimentación interna ha detectado una subtensión.
Hay una avería interna o la periferia conectada ha causado una
sobrecarga/cortocircuito.
Medida � Comprobar que no haya cortocircuitos ni carga especificada
en las salidas digitales y en la salida del freno.
� Desconectar el equipo de todos los periféricos y comprobar si
después de reiniciarlo sigue habiendo un error. Si es así, hay
una avería interna � Reparación por el fabricante.
5-1 5115 h Fallo de tensión interna 2 PSoff
Causa El control de la alimentación interna ha detectado una subtensión.
Hay una avería interna o la periferia conectada ha causado una
sobrecarga/cortocircuito.
Medida � Comprobar que no haya cortocircuitos ni carga especificada
en las salidas digitales y en la salida del freno.
� Desconectar el equipo de todos los periféricos y comprobar si
después de reiniciarlo sigue habiendo un error. Si es así, hay
una avería interna � Reparación por el fabricante.
5-2 5116 h Fallo de alimentación del excitador PSoff
Causa El control de la alimentación interna ha detectado una subtensión.
Hay una avería interna o la periferia conectada ha causado una
sobrecarga/cortocircuito.
Medida � Comprobar que no haya cortocircuitos ni carga especificada
en las salidas digitales y en la salida del freno.
� Desconectar el equipo de todos los periféricos y comprobar si
después de reiniciarlo sigue habiendo un error. Si es así, hay
una avería interna � Reparación por el fabricante.

B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 237
Grupo de errores 5 Fuente de alimentación interna
N.º ReacciónMensajeCódigo
5-3 5410 h Subtensión en I/O digitales PSoff
Causa ¿Sobrecarga de las I/Os?
¿Periferia averiada?
Medida � Comprobar que no haya cortocircuitos ni carga especificada
en la periferia conectada.
� Comprobar la conexión del freno (¿está mal conectada?).
5-4 5410 h Sobrecorriente en I/O digitales PSoff
Causa ¿Sobrecarga de las I/Os?
¿Periferia averiada?
Medida � Comprobar que no haya cortocircuitos ni carga especificada
en la periferia conectada.
� Comprobar la conexión del freno (¿está mal conectada?).
5-5 - Fallo de tensión de módulo en Ext1/Ext2 PSoff
Causa Avería en la interfaz insertada.
Medida � Cambiar interfaz � Reparación por el fabricante.
5-6 - Fallo de tensión X10, X11 und RS232 PSoff
Causa Sobrecarga a causa de periferia conectada.
Medida � Comprobar asignación de contactos de la periferia conectada.
� ¿Cortocircuito?
5-7 - Fallo de tensión interna de módulo de seguridad PSoff
Causa Avería en el módulo de seguridad.
Medida � Avería interna � Reparación por el fabricante.
5-8 - Fallo de tensión interna 3 (15 V) PSoff
Causa Avería en el controlador de motor.
Medida � Avería interna � Reparación por el fabricante.
5-9 - Error de alimentación del transmisor PSoff
Causa Medición inversa de la tensión del transmisor incorrecta.
Medida � Avería interna � Reparación por el fabricante.
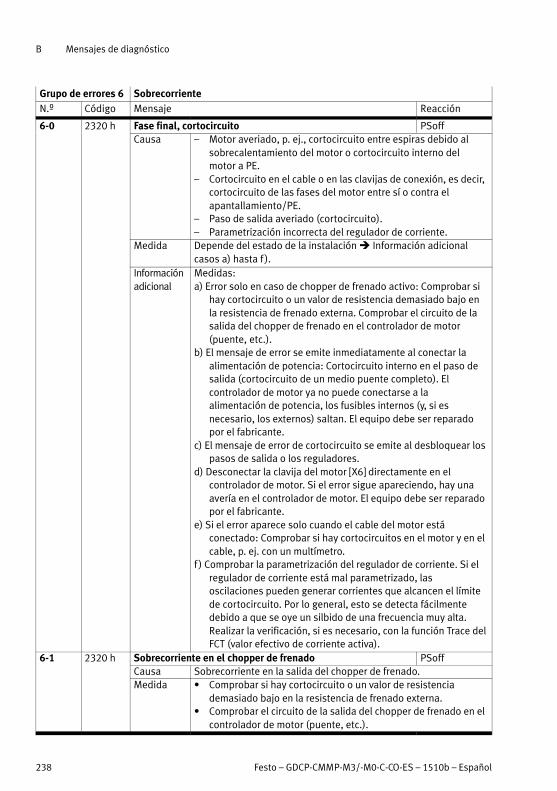
B Mensajes de diagnóstico
238 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 6 SobrecorrienteN.º Código Mensaje Reacción
6-0 2320 h Fase final, cortocircuito PSoffCausa – Motor averiado, p. ej., cortocircuito entre espiras debido al
sobrecalentamiento del motor o cortocircuito interno delmotor a PE.
– Cortocircuito en el cable o en las clavijas de conexión, es decir,cortocircuito de las fases del motor entre sí o contra elapantallamiento/PE.
– Paso de salida averiado (cortocircuito).– Parametrización incorrecta del regulador de corriente.
Medida Depende del estado de la instalación � Información adicionalcasos a) hasta f ).
Informaciónadicional
Medidas:a) Error solo en caso de chopper de frenado activo: Comprobar si
hay cortocircuito o un valor de resistencia demasiado bajo enla resistencia de frenado externa. Comprobar el circuito de lasalida del chopper de frenado en el controlador de motor(puente, etc.).
b) El mensaje de error se emite inmediatamente al conectar laalimentación de potencia: Cortocircuito interno en el paso desalida (cortocircuito de un medio puente completo). Elcontrolador de motor ya no puede conectarse a laalimentación de potencia, los fusibles internos (y, si esnecesario, los externos) saltan. El equipo debe ser reparadopor el fabricante.
c) El mensaje de error de cortocircuito se emite al desbloquear lospasos de salida o los reguladores.
d) Desconectar la clavija del motor [X6] directamente en elcontrolador de motor. Si el error sigue apareciendo, hay unaavería en el controlador de motor. El equipo debe ser reparadopor el fabricante.
e) Si el error aparece solo cuando el cable del motor estáconectado: Comprobar si hay cortocircuitos en el motor y en elcable, p. ej. con un multímetro.
f ) Comprobar la parametrización del regulador de corriente. Si elregulador de corriente está mal parametrizado, lasoscilaciones pueden generar corrientes que alcancen el límitede cortocircuito. Por lo general, esto se detecta fácilmentedebido a que se oye un silbido de una frecuencia muy alta.Realizar la verificación, si es necesario, con la función Trace delFCT (valor efectivo de corriente activa).
6-1 2320 h Sobrecorriente en el chopper de frenado PSoffCausa Sobrecorriente en la salida del chopper de frenado.Medida � Comprobar si hay cortocircuito o un valor de resistencia
demasiado bajo en la resistencia de frenado externa.� Comprobar el circuito de la salida del chopper de frenado en el
controlador de motor (puente, etc.).

B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 239
Grupo de errores 7 Sobretensión en el circuito intermedioN.º Código Mensaje Reacción
7-0 3210 h Sobretensión en el circuito intermedio PSoff
Causa La resistencia de frenado se sobrecarga, demasiada energía de
frenado que no puede eliminarse con la rapidez necesaria.
– ¿Dimensionado incorrecto de la resistencia?
– ¿Resistencia conectada incorrectamente?
– Comprobar el dimensionado (aplicación).
Medida � Comprobar el dimensionado de la resistencia de frenado,
puede que su valor sea demasiado alto.
� Comprobar la conexión a la resistencia de frenado
(interna/externa).
Grupo de errores 8 Transductor angular
N.º Código Mensaje Reacción
8-0 7380 h Error del transductor angular del resolver Configurable
Causa Amplitud de señal del resolver errónea.
Medida Procedimiento paso a paso � Información adicional caso a) hasta
c).
Información
adicional
a) Si es posible, realizar la prueba con otro resolver (sin fallos;
cambiar también el cable de conexión). Si el error sigue
apareciendo, hay una avería en el controlador de motor.
El equipo debe ser reparado por el fabricante.
b) Si el error aparece solo con un resolver especial y su cable de
conexión: Comprobar señales del resolver (soporte y señales
SIN/COS), ver especificación. Si la especificación de señal no
se respeta, cambiar el resolver.
c) Si el error vuelve a aparecer esporádicamente, examinar la
conexión de apantallamiento o comprobar si el resolver
presenta una relación de transmisión demasiado baja
(resolver normalizado: A = 0,5).

B Mensajes de diagnóstico
240 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 8 Transductor angular
N.º ReacciónMensajeCódigo
8-1 - Sentido de giro desigual de detección de posición serial eincremental
Configurable
Causa Solo transmisor con transmisión serial de la posición combinada
con una pista de señal SIN/COS analógica: El sentido de giro de la
determinación de posición interna del transmisor y la evaluación
incremental del sistema de pistas analógico del controlador de
motor se han intercambiado � Información adicional.
Medida Cambiar las señales siguientes en la interfaz del transductor
angular [X2B] (es necesario modificar los hilos del conector tipo
clavija), observar la hoja de datos del transductor angular:
– Cambiar las pistas SIN/COS.
– Cambiar las señales SIN+/SIN- o COS+/COS-.
Información
adicional
El transmisor cuenta internamente, p. ej., en positivo en sentido
horario, mientras que la evaluación incremental cuenta en sentido
negativo con el mismo giro mecánico. En el primer movimiento
mecánico superior a 30° se detecta que el sentido de giro es
incorrecto y el error se activa.
8-2 7382 h Error señales de pista Z0 encoder incremental Configurable
Causa Amplitud errónea de las señales de la pista Z0 en [X2B].
– ¿Transductor angular conectado?
– ¿Cable del transductor angular averiado?
– ¿Transductor angular averiado?
Medida Comprobar la configuración de la interfaz del transductor angular:
a) La evaluación Z0 está activada pero las señales de pista no
están conectadas o no existen � Información adicional.
b) ¿Perturbación de señales del transmisor?
c) Probar con otro transmisor.
� Tab. B.2, página 294.Información
adicional
P. ej. en EnDat 2.2 o EnDat 2.1 sin pista analógica.
Transmisor Heidenhain: Referencias EnDat 22 y EnDat 21. En
estos transmisores no hay señales incrementales, incluso cuando
los cables están conectados.
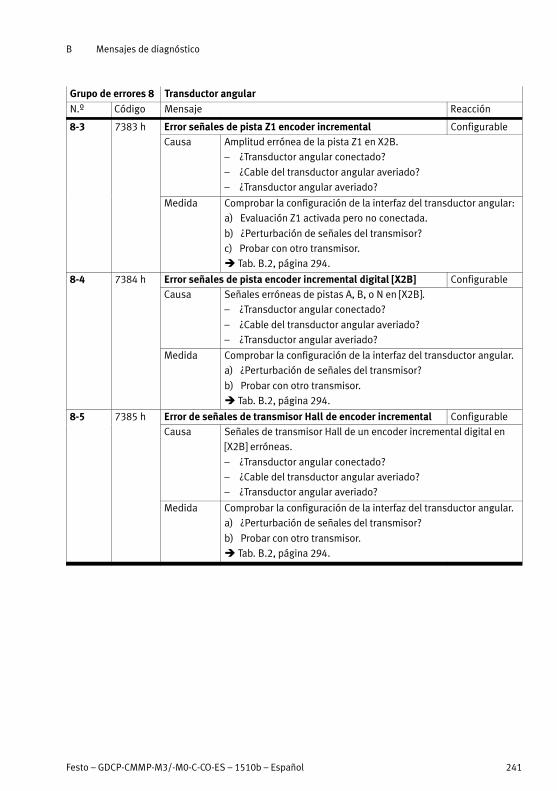
B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 241
Grupo de errores 8 Transductor angular
N.º ReacciónMensajeCódigo
8-3 7383 h Error señales de pista Z1 encoder incremental Configurable
Causa Amplitud errónea de la pista Z1 en X2B.
– ¿Transductor angular conectado?
– ¿Cable del transductor angular averiado?
– ¿Transductor angular averiado?
Medida Comprobar la configuración de la interfaz del transductor angular:
a) Evaluación Z1 activada pero no conectada.
b) ¿Perturbación de señales del transmisor?
c) Probar con otro transmisor.
� Tab. B.2, página 294.
8-4 7384 h Error señales de pista encoder incremental digital [X2B] Configurable
Causa Señales erróneas de pistas A, B, o N en [X2B].
– ¿Transductor angular conectado?
– ¿Cable del transductor angular averiado?
– ¿Transductor angular averiado?
Medida Comprobar la configuración de la interfaz del transductor angular.
a) ¿Perturbación de señales del transmisor?
b) Probar con otro transmisor.
� Tab. B.2, página 294.
8-5 7385 h Error de señales de transmisor Hall de encoder incremental Configurable
Causa Señales de transmisor Hall de un encoder incremental digital en
[X2B] erróneas.
– ¿Transductor angular conectado?
– ¿Cable del transductor angular averiado?
– ¿Transductor angular averiado?
Medida Comprobar la configuración de la interfaz del transductor angular.
a) ¿Perturbación de señales del transmisor?
b) Probar con otro transmisor.
� Tab. B.2, página 294.

B Mensajes de diagnóstico
242 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 8 Transductor angular
N.º ReacciónMensajeCódigo
8-6 7386 h Error de comunicación del transductor angular Configurable
Causa Mala comunicación con los transductores angulares seriales
(transmisor EnDat, transmisor HIPERFACE, transmisor BiSS).
– ¿Transductor angular conectado?
– ¿Cable del transductor angular averiado?
– ¿Transductor angular averiado?
Medida Comprobar la configuración de la interfaz del transductor angular:
Procedimiento conforme a los pasos a) hasta c):
a) ¿Transductor en serie parametrizado pero no conectado?
¿Se ha seleccionado un protocolo serial incorrecto?
b) ¿Perturbación de señales del transmisor?
c) Probar con otro transmisor.
� Tab. B.2, página 294.
8-7 7387 h Amplitud errónea de las señales de las pistas incrementales[X10]
Configurable
Causa Señales erróneas de pistas A, B, o N en [X10].
– ¿Transductor angular conectado?
– ¿Cable del transductor angular averiado?
– ¿Transductor angular averiado?
Medida Comprobar la configuración de la interfaz del transductor angular.
a) ¿Perturbación de señales del transmisor?
b) Probar con otro transmisor.
� Tab. B.2, página 294.
8-8 7388 h Error interno del transductor angular Configurable
Causa La monitorización interna del transductor angular [X2B] ha
detectado un error y lo ha transmitido al regulador través de la
comunicación serial.
– ¿Intensidad lumínica remisiva en transmisores ópticos?
– ¿Número de revoluciones excedido?
– ¿Transductor angular averiado?Medida Si el error se produce persistentemente, el transmisor está
averiado. � Cambiar el transmisor.

B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 243
Grupo de errores 8 Transductor angular
N.º ReacciónMensajeCódigo
8-9 7389 h Transductor angular en [X2B] no compatible Configurable
Causa En [X2B] se ha leído un tipo de transductor angular que no es
compatible o que no puede utilizarse en el modo de
funcionamiento deseado.
– ¿Se ha seleccionado un tipo de protocolo incorrecto o
inadecuado?
– ¿El firmware no es compatible con la variante de transmisor
conectada?
Medida Conforme a la información adicional del mensaje de error
� Información adicional
� Cargar el firmware apropiado.
� Comprobar y corregir la configuración de la evaluación del
transmisor.
� Conectar el tipo de transmisor apropiado.Información
adicional
Información adicional (PNU 203/213):0001: HIPERFACE: El tipo de transmisor no es compatible con el
firmware � Utilizar otro tipo de transmisor o cargar firmwaremás reciente.
0002: EnDat: El espacio de direcciones en el que deberían estarlos parámetros del transmisor no existe en el transmisor EnDatconectado � Comprobar el tipo de transmisor.
0003: EnDat: El tipo de transmisor no es compatible con elfirmware �Utilizar otro tipo de transmisor o cargar unfirmware más reciente.
0004: EnDat: La placa de características del transmisor no puedeleerse desde el transmisor conectado. � Cambiar eltransmisor o cargar un firmware más reciente.
0005: EnDat: Interfaz EnDat 2.2 parametrizada, el transmisorconectado es compatible, pero solo EnDat2.1. � Cambiar eltipo de transmisor o cambiar la parametrización a EnDat 2.1.
0006: EnDat: Interfaz EnDat 2.1 con evaluación analógica depistas parametrizada pero, conforme indica la placa decaracterísticas, el transmisor conectado no es compatible conlas señales de pista. � Cambiar el transmisor o desconectar laevaluación de señales de pista Z0.
0007: Sistema de medición de longitud de código con EnDat 2.1conectado, pero parametrizado como transmisor puramenteserial. Debido a los prolongados tiempos de respuesta, estesistema no puede utilizarse para la evaluación puramenteserial. El transmisor debe utilizarse con evaluación analógicade señales de pista � Conectar la evaluación analógica deseñales de pista Z0.
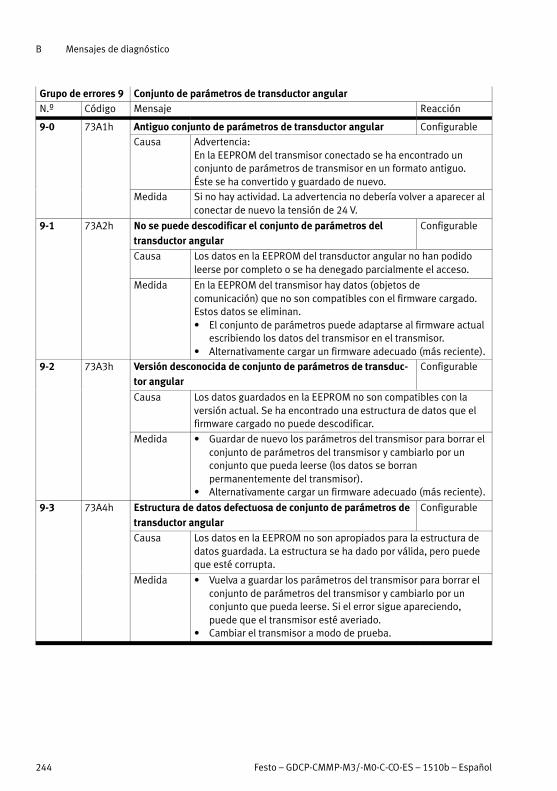
B Mensajes de diagnóstico
244 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 9 Conjunto de parámetros de transductor angularN.º Código Mensaje Reacción
9-0 73A1h Antiguo conjunto de parámetros de transductor angular Configurable
Causa Advertencia:En la EEPROM del transmisor conectado se ha encontrado unconjunto de parámetros de transmisor en un formato antiguo.Éste se ha convertido y guardado de nuevo.
Medida Si no hay actividad. La advertencia no debería volver a aparecer alconectar de nuevo la tensión de 24 V.
9-1 73A2h No se puede descodificar el conjunto de parámetros deltransductor angular
Configurable
Causa Los datos en la EEPROM del transductor angular no han podidoleerse por completo o se ha denegado parcialmente el acceso.
Medida En la EEPROM del transmisor hay datos (objetos decomunicación) que no son compatibles con el firmware cargado.Estos datos se eliminan.� El conjunto de parámetros puede adaptarse al firmware actual
escribiendo los datos del transmisor en el transmisor.� Alternativamente cargar un firmware adecuado (más reciente).
9-2 73A3h Versión desconocida de conjunto de parámetros de transductor angular
Configurable
Causa Los datos guardados en la EEPROM no son compatibles con laversión actual. Se ha encontrado una estructura de datos que elfirmware cargado no puede descodificar.
Medida � Guardar de nuevo los parámetros del transmisor para borrar elconjunto de parámetros del transmisor y cambiarlo por unconjunto que pueda leerse (los datos se borranpermanentemente del transmisor).
� Alternativamente cargar un firmware adecuado (más reciente).
9-3 73A4h Estructura de datos defectuosa de conjunto de parámetros detransductor angular
Configurable
Causa Los datos en la EEPROM no son apropiados para la estructura dedatos guardada. La estructura se ha dado por válida, pero puedeque esté corrupta.
Medida � Vuelva a guardar los parámetros del transmisor para borrar elconjunto de parámetros del transmisor y cambiarlo por unconjunto que pueda leerse. Si el error sigue apareciendo,puede que el transmisor esté averiado.
� Cambiar el transmisor a modo de prueba.

B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 245
Grupo de errores 9 Conjunto de parámetros de transductor angular
N.º ReacciónMensajeCódigo
9-4 - Datos EEPROM: La configuración específica del cliente eserrónea
Configurable
Causa Solo con motores especiales:En la verificación de plausibilidad se ha encontrado un error, p.ej.,porque el motor ha sido reparado o sustituido.
Medida � Si se ha reparado el motor: Referenciarlo de nuevo y guardarlos datos en el transductor angular. A continuación (!)guardarlos en el controlador de motor.
� Si se ha cambiado el motor: Volver a parametrizar elcontrolador, a continuación referenciarlo de nuevo y guardarlos datos en el transductor angular; después (!) guardarlos enel controlador de motor.
9-5 - Error de lectura/escritura del juego de parámetros deEEPROM
Configurable
Causa Se ha producido un error al leer o escribir los datos en el juego deparámetros interno del transmisor.
Medida Aparece en transmisores Hiperface: el firmware no puede leer uncampo de datos de la EEPROM del transmisor o, por razonesdesconocidas, no ha podido escribirse ningún dato en eltransmisor.� Enviar el motor al fabricante para su comprobación.
9-7 73A5h EEPROM de transductor angular con protección de escritura Configurable
Causa No es posible guardar los datos en el EEPROM del transductorangular.Aparece en transmisores Hiperface.
Medida Un campo de datos de la EEPROM del transmisor es solo delectura (p. ej., después del funcionamiento en un controlador demotor de otro fabricante). No hay solución. La memoria detransmisión debe desbloquearse con la herramienta deparametrización correspondiente (del fabricante).
9-9 73A6h EEPROM del transductor angular demasiado pequeña Configurable
Causa No han podido guardarse todos los datos en la EEPROM deltransductor angular.
Medida � Reduzca el número de los conjuntos de datos que debenguardarse. Lea la documentación o póngase en contacto conel soporte técnico.
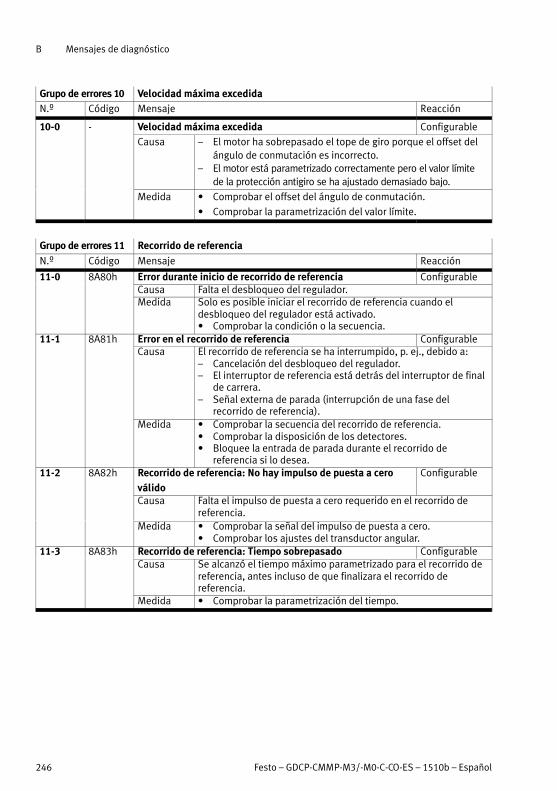
B Mensajes de diagnóstico
246 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 10 Velocidad máxima excedidaN.º Código Mensaje Reacción
10-0 - Velocidad máxima excedida Configurable
Causa – El motor ha sobrepasado el tope de giro porque el offset delángulo de conmutación es incorrecto.
– El motor está parametrizado correctamente pero el valor límitede la protección antigiro se ha ajustado demasiado bajo.
Medida � Comprobar el offset del ángulo de conmutación.
� Comprobar la parametrización del valor límite.
Grupo de errores 11 Recorrido de referencia
N.º Código Mensaje Reacción
11-0 8A80h Error durante inicio de recorrido de referencia ConfigurableCausa Falta el desbloqueo del regulador.Medida Solo es posible iniciar el recorrido de referencia cuando el
desbloqueo del regulador está activado.� Comprobar la condición o la secuencia.
11-1 8A81h Error en el recorrido de referencia ConfigurableCausa El recorrido de referencia se ha interrumpido, p. ej., debido a:
– Cancelación del desbloqueo del regulador.– El interruptor de referencia está detrás del interruptor de final
de carrera.– Señal externa de parada (interrupción de una fase del
recorrido de referencia).Medida � Comprobar la secuencia del recorrido de referencia.
� Comprobar la disposición de los detectores.� Bloquee la entrada de parada durante el recorrido de
referencia si lo desea.11-2 8A82h Recorrido de referencia: No hay impulso de puesta a cero
válidoConfigurable
Causa Falta el impulso de puesta a cero requerido en el recorrido dereferencia.
Medida � Comprobar la señal del impulso de puesta a cero.� Comprobar los ajustes del transductor angular.
11-3 8A83h Recorrido de referencia: Tiempo sobrepasado ConfigurableCausa Se alcanzó el tiempo máximo parametrizado para el recorrido de
referencia, antes incluso de que finalizara el recorrido dereferencia.
Medida � Comprobar la parametrización del tiempo.

B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 247
Grupo de errores 11 Recorrido de referencia
N.º ReacciónMensajeCódigo
11-4 8A84h Recorrido de referencia: Interruptor de final de carreraincorrecto
Configurable
Causa – Interruptorr de final de carrera pertinente no conectado.– ¿Se han intercambiado los interruptores de final de carrera?– No se ha encontrado ningún interruptor de referencia entre
ambos interruptores de final de carrera.– El interruptor de referencia está sobre el interruptor de final
de carrera.– Método: Posición actual con impulso de puesta a cero:
Interruptor de final de carrera activado dentro de la zona deimpulso de puesta a cero (no permitido).
– Ambos interruptores de final de carrera activados al mismotiempo.
Medida � Comprobar si los interruptores de final de carrera estánconectados en el sentido de la marcha correcto o si losinterruptores de final de carrera afectan a las entradasprevistas.
� ¿Interruptor de referencia conectado?� Comprobar la disposición del interruptor de referencia.� Desplazar el interruptor de final de carrera de modo que no se
encuentre en la zona de impulso de puesta a cero.� Comprobar la parametrización del interruptor de final de
carrera (contacto normalmente cerrado/abierto).11-5 8A85h Recorrido de referencia: I²t / error de seguimiento Configurable
Causa – Rampas de aceleración parametrizadas de manerainadecuada.
– Cambio de sentido mediante error de seguimiento activadoprematuramente, comprobar la parametrización del error deseguimiento.
– No se ha alcanzado ningún interruptor de referencia entre lostopes finales.
– Método impulso de puesta a cero: Tope final alcanzado (aquí,no permitido).
Medida � Parametrizar las rampas de aceleración más planas.� Comprobar la conexión de un interruptor de referencia.� ¿Métodos apropiados para la aplicación?
11-6 8A86h Recorrido de referencia: Final del recorrido de búsqueda ConfigurableCausa Ha concluido el trayecto máximo permitido del recorrido de
referencia sin que se haya alcanzado el punto de referencia ni eldestino del recorrido de referencia.
Medida Fallo en la detección del interruptor.� ¿Interruptor del recorrido de referencia averiado?

B Mensajes de diagnóstico
248 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 11 Recorrido de referencia
N.º ReacciónMensajeCódigo
11-7 - Recorrido de referencia: Error de supervisión de diferenciaentre transmisores
Configurable
Causa La discrepancia entre el valor efectivo de posición y la posiciónde conmutación es demasiado alta. ¿Transductor angular externono conectado o averiado?
Medida � La discrepancia varía, p.ej., debido al juego de los engranajes.Si es necesario, ampliar el umbral de desconexión.
� Comprobar la conexión del transmisor de valor efectivo.
Grupo de errores 12 Comunicación CAN
N.º Código Mensaje Reacción
12-0 8180 h CAN: Número de nodo duplicado Configurable
Causa Número de nodo asignado dos veces.
Medida � Comprobar la configuración de participantes en el bus CAN.
12-1 8120 h CAN: Error de comunicación, bus DESCONECTADO Configurable
Causa El chip CAN ha desconectado la comunicación debido a errores
de comunicación (BUS OFF).
Medida � Comprobar el cableado: ¿Se ha respetado la especificación
de cables; rotura de cables; longitud máxima de cables
excedida; resistencias de terminación correctas; apantallado
del cable puesto a tierra; todas las señales aplicadas?
� Cambiar el equipo a modo de prueba. Si otro equipo con el
mismo cableado funciona sin faltas, enviar el equipo al
fabricante para su verificación.
12-2 8181 h CAN: Errores de comunicación durante el envío Configurable
Causa Al enviar mensajes, las señales están perturbadas.
Encender el equipo tan rápido de manera que al enviar el mensaje
de arranque no pueda detectarse ningún otro nodo en el bus.
Medida � Comprobar el cableado: ¿Se ha respetado la especificación
de cables; rotura de cables; longitud máxima de cables
excedida; resistencias de terminación correctas; apantallado
del cable puesto a tierra; todas las señales aplicadas?
� Cambiar el equipo a modo de prueba. Si otro equipo con el
mismo cableado funciona sin faltas, enviar el equipo al
fabricante para su verificación.
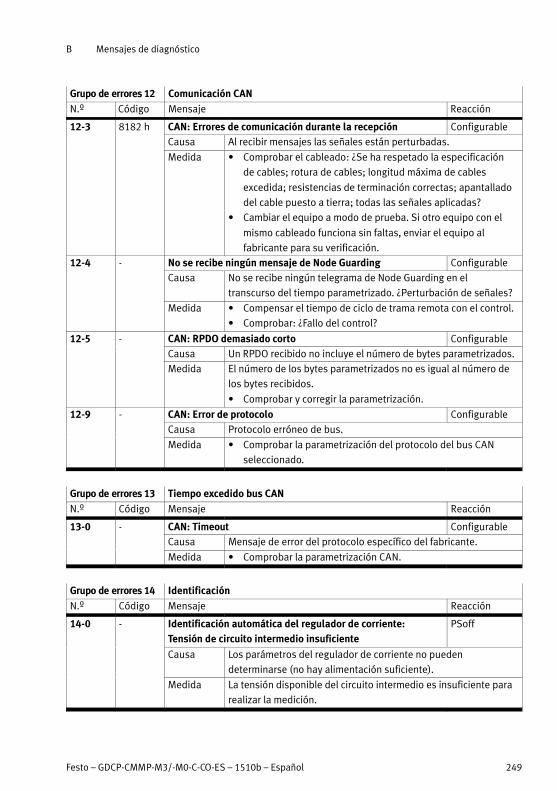
B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 249
Grupo de errores 12 Comunicación CAN
N.º ReacciónMensajeCódigo
12-3 8182 h CAN: Errores de comunicación durante la recepción Configurable
Causa Al recibir mensajes las señales están perturbadas.
Medida � Comprobar el cableado: ¿Se ha respetado la especificación
de cables; rotura de cables; longitud máxima de cables
excedida; resistencias de terminación correctas; apantallado
del cable puesto a tierra; todas las señales aplicadas?
� Cambiar el equipo a modo de prueba. Si otro equipo con el
mismo cableado funciona sin faltas, enviar el equipo al
fabricante para su verificación.
12-4 - No se recibe ningún mensaje de Node Guarding Configurable
Causa No se recibe ningún telegrama de Node Guarding en el
transcurso del tiempo parametrizado. ¿Perturbación de señales?
Medida � Compensar el tiempo de ciclo de trama remota con el control.
� Comprobar: ¿Fallo del control?
12-5 - CAN: RPDO demasiado corto Configurable
Causa Un RPDO recibido no incluye el número de bytes parametrizados.
Medida El número de los bytes parametrizados no es igual al número de
los bytes recibidos.
� Comprobar y corregir la parametrización.
12-9 - CAN: Error de protocolo Configurable
Causa Protocolo erróneo de bus.
Medida � Comprobar la parametrización del protocolo del bus CAN
seleccionado.
Grupo de errores 13 Tiempo excedido bus CAN
N.º Código Mensaje Reacción
13-0 - CAN: Timeout Configurable
Causa Mensaje de error del protocolo específico del fabricante.
Medida � Comprobar la parametrización CAN.
Grupo de errores 14 Identificación
N.º Código Mensaje Reacción
14-0 - Identificación automática del regulador de corriente:Tensión de circuito intermedio insuficiente
PSoff
Causa Los parámetros del regulador de corriente no pueden
determinarse (no hay alimentación suficiente).
Medida La tensión disponible del circuito intermedio es insuficiente para
realizar la medición.
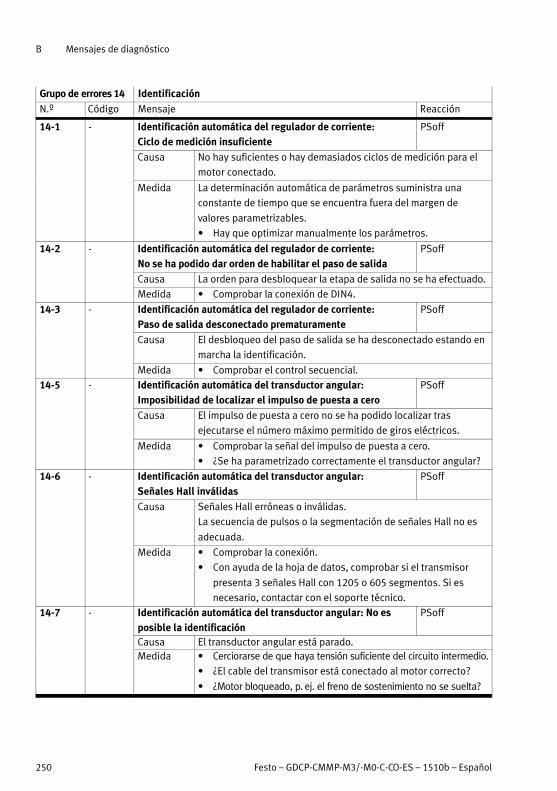
B Mensajes de diagnóstico
250 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 14 Identificación
N.º ReacciónMensajeCódigo
14-1 - Identificación automática del regulador de corriente:Ciclo de medición insuficiente
PSoff
Causa No hay suficientes o hay demasiados ciclos de medición para el
motor conectado.
Medida La determinación automática de parámetros suministra una
constante de tiempo que se encuentra fuera del margen de
valores parametrizables.
� Hay que optimizar manualmente los parámetros.
14-2 - Identificación automática del regulador de corriente: No se ha podido dar orden de habilitar el paso de salida
PSoff
Causa La orden para desbloquear la etapa de salida no se ha efectuado.
Medida � Comprobar la conexión de DIN4.
14-3 - Identificación automática del regulador de corriente:Paso de salida desconectado prematuramente
PSoff
Causa El desbloqueo del paso de salida se ha desconectado estando en
marcha la identificación.
Medida � Comprobar el control secuencial.
14-5 - Identificación automática del transductor angular:Imposibilidad de localizar el impulso de puesta a cero
PSoff
Causa El impulso de puesta a cero no se ha podido localizar tras
ejecutarse el número máximo permitido de giros eléctricos.
Medida � Comprobar la señal del impulso de puesta a cero.
� ¿Se ha parametrizado correctamente el transductor angular?
14-6 - Identificación automática del transductor angular:Señales Hall inválidas
PSoff
Causa Señales Hall erróneas o inválidas.
La secuencia de pulsos o la segmentación de señales Hall no es
adecuada.
Medida � Comprobar la conexión.
� Con ayuda de la hoja de datos, comprobar si el transmisor
presenta 3 señales Hall con 1205 o 605 segmentos. Si es
necesario, contactar con el soporte técnico.
14-7 - Identificación automática del transductor angular: No esposible la identificación
PSoff
Causa El transductor angular está parado.Medida � Cerciorarse de que haya tensión suficiente del circuito intermedio.
� ¿El cable del transmisor está conectado al motor correcto?
� ¿Motor bloqueado, p. ej. el freno de sostenimiento no se suelta?

B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 251
Grupo de errores 14 Identificación
N.º ReacciónMensajeCódigo
14-8 - Identificación automática del transductor angular: Númerode pares de polos inválido
PSoff
Causa El número de pares de polos calculado se encuentra fuera del
rango parametrizado.Medida � Compare el resultado con los datos de la hoja de datos del
motor.
� Comprobar el número de impulsos parametrizado.
Grupo de errores 15 Operación no válidaN.º Código Mensaje Reacción
15-0 6185 h División entre cero PSoffCausa Error interno de firmware. División entre 0 utilizando la biblioteca
de matemáticas.Medida � Cargar ajustes de fábrica.
� Comprobar que se ha cargado un firmware autorizado.15-1 6186 h Rebose matemático en división PSoff
Causa Error interno de firmware. Overflow al utilizar la biblioteca de
matemáticas.Medida � Cargar ajustes de fábrica.
� Comprobar que se ha cargado un firmware autorizado.15-2 - Flujo matemático insuficiente PSoff
Causa Error interno de firmware. Las magnitudes internas de corrección
no han podido calcularse.Medida � Comprobar el ajuste de los valores máximos del Factor Group
y modificarlo si es necesario.
Grupo de errores 16 Error internoN.º Código Mensaje Reacción
16-0 6181 h Ejecución defectuosa del programa PSoff
Causa Error interno de firmware. Error en la ejecución del programa. Se
ha encontrado una orden de CPU no autorizada en la ejecución
del programa.
Medida � Si se repite el error, volver a cargar el firmware. Si el error se
produce repetidamente, el hardware está averiado.
16-1 6182 h Interrupción no autorizada PSoff
Causa Error en la ejecución del programa. La CPU ha empleado un
vector IRQ no utilizado.
Medida � Si se repite el error, volver a cargar el firmware. Si el error se
produce repetidamente, el hardware está averiado.

B Mensajes de diagnóstico
252 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 16 Error interno
N.º ReacciónMensajeCódigo
16-2 6187 h Error de inicialización PSoff
Causa Error durante la inicialización de los parámetros predeterminados.
Medida � Si se repite el error, volver a cargar el firmware. Si el error se
produce repetidamente, el hardware está averiado.
16-3 6183 h Estado inesperado PSoff
Causa Error en accesos de periferia internos de la CPU o error en la
ejecución del programa (bifurcación no autorizada en estructuras
case).
Medida � Si se repite el error, volver a cargar el firmware. Si el error se
produce repetidamente, el hardware está averiado.
Grupo de errores 17 Excedido el valor límite de error de seguimientoN.º Código Mensaje Reacción
17-0 8611 h Excedido el valor límite de error de seguimiento Configurable
Causa Se ha sobrepasado el valor límite del error de seguimiento.
Medida � Ampliar el margen de error.
� Parametrizar una aceleración menor.
� Motor sobrecargado (¿limitación de corriente de la
supervisión I²t activada?).
17-1 8611 h Supervisión de diferencia entre transmisores Configurable
Causa La discrepancia entre el valor efectivo de posición y la posición
de conmutación es demasiado alta.
¿Transductor angular externo no conectado o averiado?
Medida � La discrepancia varía, p. ej., debido al juego de los engranajes. Si
es necesario, ampliar el umbral de desconexión.
� Comprobar la conexión del transmisor de valor efectivo.
Grupo de errores 18 Umbrales de aviso de temperaturaN.º Código Mensaje Reacción
18-0 - Temperatura analógica del motor Configurable
Causa La temperatura del motor (analógica) es superior a 5° en T_máx.
Medida � Comprobar la parametrización del regulador de corriente o
del regulador del número de revoluciones.
� ¿El motor está siempre sobrecargado?

B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 253
Grupo de errores 21 Medición de intensidadN.º Código Mensaje Reacción
21-0 5280 h Error 1 medición de corriente U PSoff
Causa Desplazamiento de la medición de corriente 1 fase U demasiado
grande. El regulador ejecuta una compensación del offset de la
medición de corriente cada vez que se desbloquea el regulador.
Las tolerancias demasiado altas ocasionan un error.
Medida Si el error se produce repetidamente, el hardware está averiado.
21-1 5281 h Error 1 medición de corriente V PSoff
Causa Offset de la medición de corriente 1, fase V, demasiado grande.
Medida Si el error se produce repetidamente, el hardware está averiado.
21-2 5282 h Error 2 medición de corriente U PSoff
Causa Desplazamiento de la medición de corriente 2 fase U demasiado
grande.
Medida Si el error se produce repetidamente, el hardware está averiado.
21-3 5283 h Error 2 medición de corriente V PSoff
Causa Offset de la medición de corriente 2, fase V, demasiado grande.
Medida Si el error se produce repetidamente, el hardware está averiado.
Grupo de errores 22 PROFIBUS (solo CMMP-AS-...-M3)N.º Código Mensaje Reacción
22-0 - PROFIBUS: Error de inicialización Configurable
Causa Inicialización errónea de la interfaz PROFIBUS. ¿Interfaz defectuosa?
Medida � Cambiar la interfaz. Si es necesario, el equipo puede enviarse
al fabricante para su reparación.
22-2 - PROFIBUS: Comunicación errónea Configurable
Causa Fallos de comunicación.
Medida � Comprobar la dirección de slave ajustada.
� Comprobar el terminal de bus.
� Comprobar el cableado.
22-3 - PROFIBUS: Dirección de slave incorrecta Configurable
Causa La comunicación con la dirección del slave 126 se ha iniciado.
Medida � Selección de otra dirección de slave.
22-4 - PROFIBUS: Error de conversión Configurable
Causa El margen de valores se ha excedido al convertirse con Factor
Group. Error matemático en la conversión de las unidades físicas.
Medida Margen de valores de datos y de unidades físicas no acordes entre sí.
� Comprobar y corregir.
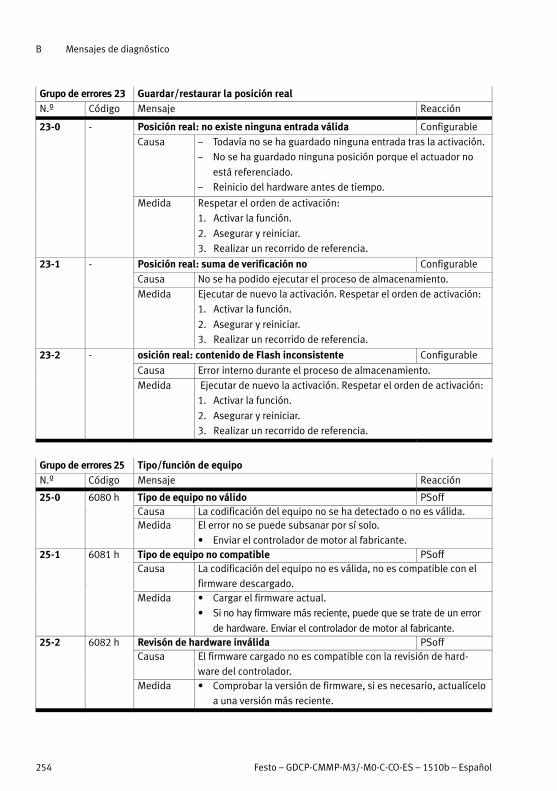
B Mensajes de diagnóstico
254 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 23 Guardar/restaurar la posición realN.º Código Mensaje Reacción
23-0 - Posición real: no existe ninguna entrada válida Configurable
Causa – Todavía no se ha guardado ninguna entrada tras la activación.
– No se ha guardado ninguna posición porque el actuador no
está referenciado.
– Reinicio del hardware antes de tiempo.
Medida Respetar el orden de activación:
1. Activar la función.
2. Asegurar y reiniciar.
3. Realizar un recorrido de referencia.
23-1 - Posición real: suma de verificación no Configurable
Causa No se ha podido ejecutar el proceso de almacenamiento.
Medida Ejecutar de nuevo la activación. Respetar el orden de activación:
1. Activar la función.
2. Asegurar y reiniciar.
3. Realizar un recorrido de referencia.
23-2 - osición real: contenido de Flash inconsistente Configurable
Causa Error interno durante el proceso de almacenamiento.
Medida Ejecutar de nuevo la activación. Respetar el orden de activación:
1. Activar la función.
2. Asegurar y reiniciar.
3. Realizar un recorrido de referencia.
Grupo de errores 25 Tipo/función de equipoN.º Código Mensaje Reacción
25-0 6080 h Tipo de equipo no válido PSoffCausa La codificación del equipo no se ha detectado o no es válida.Medida El error no se puede subsanar por sí solo.
� Enviar el controlador de motor al fabricante.25-1 6081 h Tipo de equipo no compatible PSoff
Causa La codificación del equipo no es válida, no es compatible con el
firmware descargado.Medida � Cargar el firmware actual.
� Si no hay firmware más reciente, puede que se trate de un error
de hardware. Enviar el controlador de motor al fabricante.25-2 6082 h Revisón de hardware inválida PSoff
Causa El firmware cargado no es compatible con la revisión de hard
ware del controlador.Medida � Comprobar la versión de firmware, si es necesario, actualícelo
a una versión más reciente.
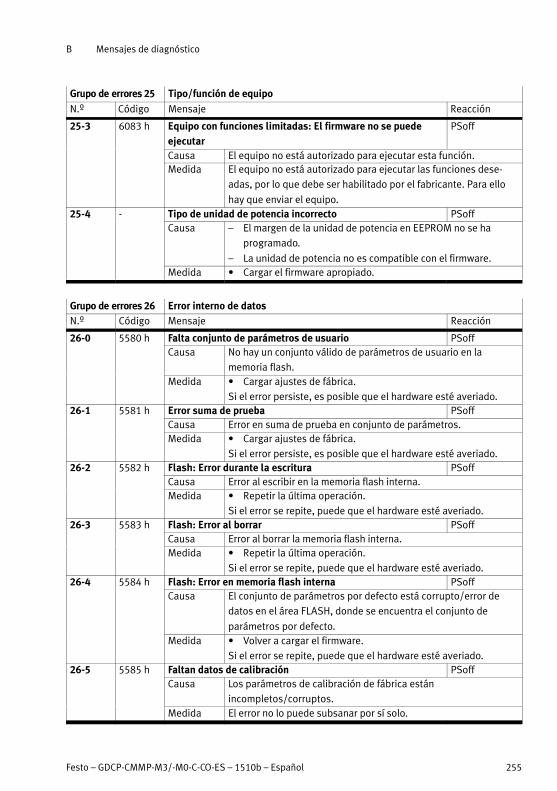
B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 255
Grupo de errores 25 Tipo/función de equipo
N.º ReacciónMensajeCódigo
25-3 6083 h Equipo con funciones limitadas: El firmware no se puedeejecutar
PSoff
Causa El equipo no está autorizado para ejecutar esta función.Medida El equipo no está autorizado para ejecutar las funciones dese
adas, por lo que debe ser habilitado por el fabricante. Para ello
hay que enviar el equipo.25-4 - Tipo de unidad de potencia incorrecto PSoff
Causa – El margen de la unidad de potencia en EEPROM no se ha
programado.
– La unidad de potencia no es compatible con el firmware.Medida � Cargar el firmware apropiado.
Grupo de errores 26 Error interno de datosN.º Código Mensaje Reacción
26-0 5580 h Falta conjunto de parámetros de usuario PSoffCausa No hay un conjunto válido de parámetros de usuario en la
memoria flash.Medida � Cargar ajustes de fábrica.
Si el error persiste, es posible que el hardware esté averiado.26-1 5581 h Error suma de prueba PSoff
Causa Error en suma de prueba en conjunto de parámetros.Medida � Cargar ajustes de fábrica.
Si el error persiste, es posible que el hardware esté averiado.26-2 5582 h Flash: Error durante la escritura PSoff
Causa Error al escribir en la memoria flash interna.Medida � Repetir la última operación.
Si el error se repite, puede que el hardware esté averiado.26-3 5583 h Flash: Error al borrar PSoff
Causa Error al borrar la memoria flash interna.Medida � Repetir la última operación.
Si el error se repite, puede que el hardware esté averiado.26-4 5584 h Flash: Error en memoria flash interna PSoff
Causa El conjunto de parámetros por defecto está corrupto/error de
datos en el área FLASH, donde se encuentra el conjunto de
parámetros por defecto.Medida � Volver a cargar el firmware.
Si el error se repite, puede que el hardware esté averiado.26-5 5585 h Faltan datos de calibración PSoff
Causa Los parámetros de calibración de fábrica están
incompletos/corruptos.Medida El error no lo puede subsanar por sí solo.

B Mensajes de diagnóstico
256 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 26 Error interno de datos
N.º ReacciónMensajeCódigo
26-6 5586 h Faltan conjuntos de datos de posición PSoffCausa Conjuntos de datos de posición incompletos o corruptos.Medida � Cargar ajustes de fábrica o
� guardar de nuevo los parámetros actuales para poder escribir
otra vez los datos de posición.26-7 - Error en las tablas de datos (CAM) PSoff
Causa Datos para el disco de leva corruptos.Medida � Cargar ajustes de fábrica.
� Volver a cargar el conjunto de parámetros si es necesario.
Si persiste el error, póngase en contacto con con el soporte técnico.
Grupo de errores 27 Control de error de seguimientoN.º Código Mensaje Reacción
27-0 8611 h Umbral de aviso de error de seguimiento Configurable
Causa – ¿Motor sobrecargado? Comprobar el dimensionado.
– El ajuste de las rampas de aceleración o de frenado es
demasiado inclinado.
– ¿Motor bloqueado? ¿Ángulo de conmutación correcto?
Medida � Comprobar la parametrización de los datos del motor.
� Comprobar la parametrización del error de seguimiento.
Grupo de errores 28 Contador de horas de servicioN.º Código Mensaje Reacción
28-0 FF01h Falta el contador de horas de servicio ConfigurableCausa En el bloque de parámetros no ha podido encontrarse ningún
conjunto de datos para un contador de horas de servicio. Se hacreado un contador de horas de servicio nuevo. Aparece en laprimera puesta a punto o cuando se cambia el procesador.
Medida Esto solo es una advertencia y no es necesario adoptar másmedidas.
28-1 FF02h Contador de horas de servicio: Error de escritura ConfigurableCausa El bloque de datos en que se encuentra el contador de horas de
servicio no ha podido escribirse. La causa es desconocida, puedeque haya problemas con el hardware.
Medida Esto solo es una advertencia y no es necesario adoptar másmedidas.Si aparece de nuevo, puede que el hardware esté averiado.
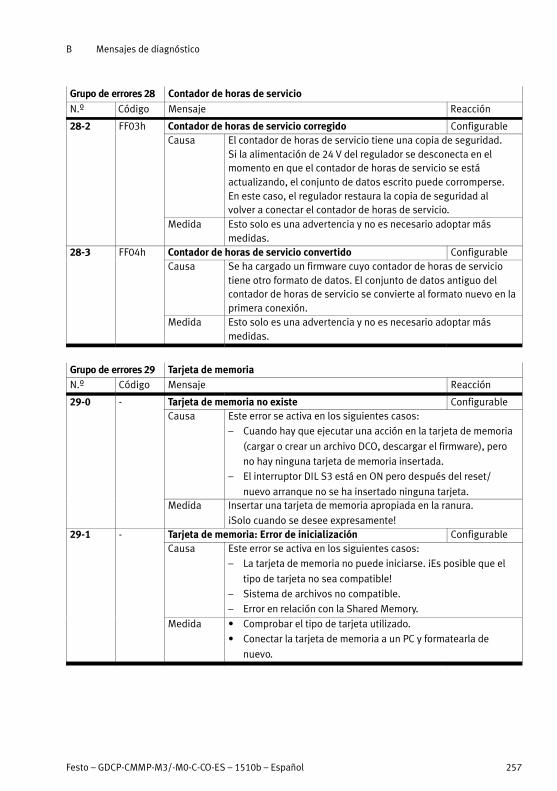
B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 257
Grupo de errores 28 Contador de horas de servicio
N.º ReacciónMensajeCódigo
28-2 FF03h Contador de horas de servicio corregido ConfigurableCausa El contador de horas de servicio tiene una copia de seguridad.
Si la alimentación de 24 V del regulador se desconecta en elmomento en que el contador de horas de servicio se estáactualizando, el conjunto de datos escrito puede corromperse.En este caso, el regulador restaura la copia de seguridad alvolver a conectar el contador de horas de servicio.
Medida Esto solo es una advertencia y no es necesario adoptar másmedidas.
28-3 FF04h Contador de horas de servicio convertido ConfigurableCausa Se ha cargado un firmware cuyo contador de horas de servicio
tiene otro formato de datos. El conjunto de datos antiguo delcontador de horas de servicio se convierte al formato nuevo en laprimera conexión.
Medida Esto solo es una advertencia y no es necesario adoptar másmedidas.
Grupo de errores 29 Tarjeta de memoriaN.º Código Mensaje Reacción
29-0 - Tarjeta de memoria no existe ConfigurableCausa Este error se activa en los siguientes casos:
– Cuando hay que ejecutar una acción en la tarjeta de memoria
(cargar o crear un archivo DCO, descargar el firmware), pero
no hay ninguna tarjeta de memoria insertada.
– El interruptor DIL S3 está en ON pero después del reset/
nuevo arranque no se ha insertado ninguna tarjeta.Medida Insertar una tarjeta de memoria apropiada en la ranura.
¡Solo cuando se desee expresamente!29-1 - Tarjeta de memoria: Error de inicialización Configurable
Causa Este error se activa en los siguientes casos:
– La tarjeta de memoria no puede iniciarse. ¡Es posible que el
tipo de tarjeta no sea compatible!
– Sistema de archivos no compatible.
– Error en relación con la Shared Memory.
Medida � Comprobar el tipo de tarjeta utilizado.
� Conectar la tarjeta de memoria a un PC y formatearla de
nuevo.
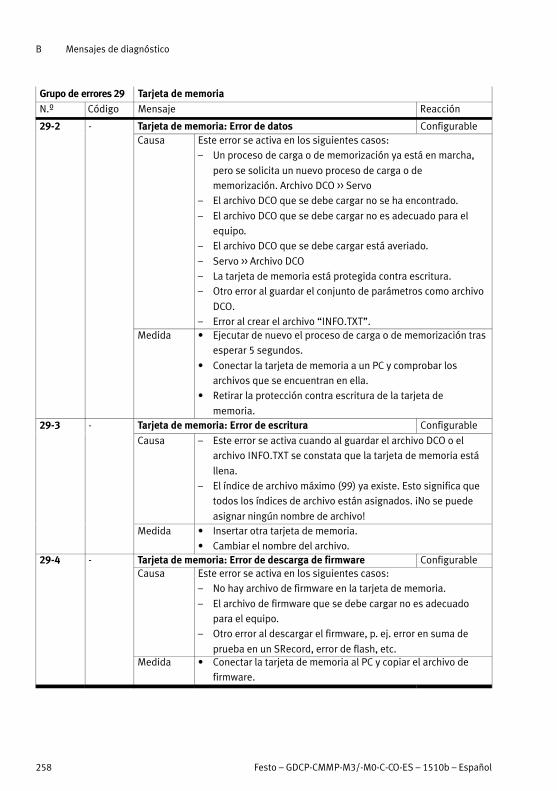
B Mensajes de diagnóstico
258 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 29 Tarjeta de memoria
N.º ReacciónMensajeCódigo
29-2 - Tarjeta de memoria: Error de datos ConfigurableCausa Este error se activa en los siguientes casos:
– Un proceso de carga o de memorización ya está en marcha,
pero se solicita un nuevo proceso de carga o de
memorización. Archivo DCO >> Servo
– El archivo DCO que se debe cargar no se ha encontrado.
– El archivo DCO que se debe cargar no es adecuado para el
equipo.
– El archivo DCO que se debe cargar está averiado.
– Servo >> Archivo DCO
– La tarjeta de memoria está protegida contra escritura.
– Otro error al guardar el conjunto de parámetros como archivo
DCO.
– Error al crear el archivo “INFO.TXT”.Medida � Ejecutar de nuevo el proceso de carga o de memorización tras
esperar 5 segundos.
� Conectar la tarjeta de memoria a un PC y comprobar los
archivos que se encuentran en ella.
� Retirar la protección contra escritura de la tarjeta de
memoria.29-3 - Tarjeta de memoria: Error de escritura Configurable
Causa – Este error se activa cuando al guardar el archivo DCO o el
archivo INFO.TXT se constata que la tarjeta de memoria está
llena.
– El índice de archivo máximo (99) ya existe. Esto significa que
todos los índices de archivo están asignados. ¡No se puede
asignar ningún nombre de archivo!Medida � Insertar otra tarjeta de memoria.
� Cambiar el nombre del archivo.29-4 - Tarjeta de memoria: Error de descarga de firmware Configurable
Causa Este error se activa en los siguientes casos:
– No hay archivo de firmware en la tarjeta de memoria.
– El archivo de firmware que se debe cargar no es adecuado
para el equipo.
– Otro error al descargar el firmware, p. ej. error en suma de
prueba en un SRecord, error de flash, etc.Medida � Conectar la tarjeta de memoria al PC y copiar el archivo de
firmware.
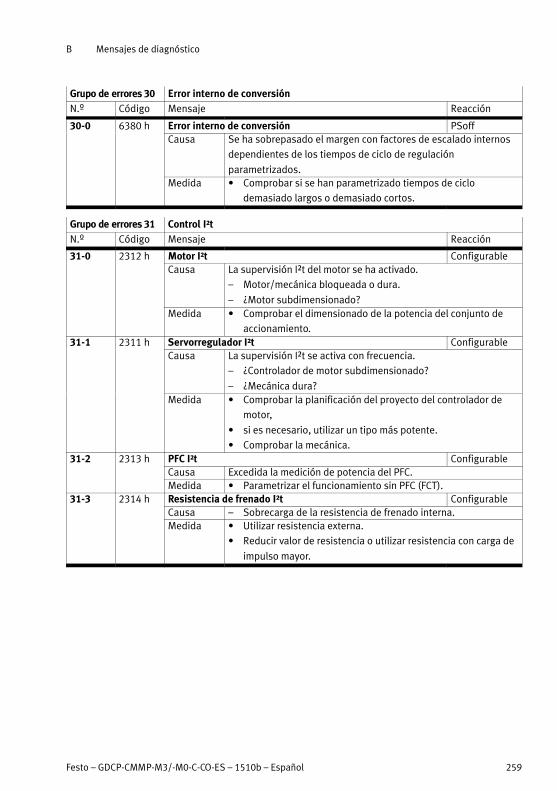
B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 259
Grupo de errores 30 Error interno de conversiónN.º Código Mensaje Reacción
30-0 6380 h Error interno de conversión PSoffCausa Se ha sobrepasado el margen con factores de escalado internos
dependientes de los tiempos de ciclo de regulación
parametrizados.Medida � Comprobar si se han parametrizado tiempos de ciclo
demasiado largos o demasiado cortos.
Grupo de errores 31 Control I²tN.º Código Mensaje Reacción
31-0 2312 h Motor I²t ConfigurableCausa La supervisión I²t del motor se ha activado.
– Motor/mecánica bloqueada o dura.
– ¿Motor subdimensionado?Medida � Comprobar el dimensionado de la potencia del conjunto de
accionamiento.31-1 2311 h Servorregulador I²t Configurable
Causa La supervisión I²t se activa con frecuencia.
– ¿Controlador de motor subdimensionado?
– ¿Mecánica dura?Medida � Comprobar la planificación del proyecto del controlador de
motor,
� si es necesario, utilizar un tipo más potente.
� Comprobar la mecánica.31-2 2313 h PFC I²t Configurable
Causa Excedida la medición de potencia del PFC.Medida � Parametrizar el funcionamiento sin PFC (FCT).
31-3 2314 h Resistencia de frenado I²t ConfigurableCausa – Sobrecarga de la resistencia de frenado interna.Medida � Utilizar resistencia externa.
� Reducir valor de resistencia o utilizar resistencia con carga de
impulso mayor.

B Mensajes de diagnóstico
260 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 32 Circuito intermedioN.º Código Mensaje Reacción
32-0 3280 h Tiempo de carga de circuito intermedio sobrepasado ConfigurableCausa No se ha podido cargar el circuito intermedio después de aplicar
la tensión de alimentación.– El fusible puede estar averiado o
– la resistencia de frenado interna está averiada o
– en funcionamiento con resistencia externa no está conectado.Medida � Comprobar la interfaz de la resistencia de frenado externa.
� Alternativamente, comprobar si el puente de la resistencia defrenado está aplicado.
Si la interfaz es correcta, es probable que la resistencia defrenado interna o el fusible integrado estén averiados. Lareparación no puede efectuarse in situ.
32-1 3281 h Subtensión para PFC activo ConfigurableCausa El PFC puede activarse solo a partir de una tensión de circuito
intermedio de aprox. 130 V DC.Medida � Comprobar la alimentación de potencia.
32-5 3282 h Sobrecarga chopper de frenado ConfigurableCausa La carga normal del chopper de frenado al inicio de la descarga
rápida ya estaba por encima del 100 %. La descarga rápida hacausado que el chopper de frenado alcance el límite máximo decarga y se ha obstaculizado/interrumpido.
Medida No se requiere ninguna medida.32-6 3283 h Tiempo de descarga de circuito intermedio sobrepasado Configurable
Causa No ha podido descargarse rápidamente el circuito intermedio.Puede que la resistencia de frenado interna esté averiada o queno esté conectada cuando el funcionamiento se realiza con unaresistencia externa.
Medida � Comprobar la interfaz de la resistencia de frenado externa.� Alternativamente, comprobar si el puente de la resistencia de
frenado está aplicado.Si la resistencia interna está seleccionada y el puente estáaplicado correctamente, es probable que la resistencia defrenado interna esté averiada.
32-7 3284 h No hay alimentación de potencia para desbloquear elregulador
Configurable
Causa La orden de desbloqueo del regulador se dio cuando el circuitointermedio aún estaba en la fase de carga, con la tensión dealimentación aplicada, y el relé de red todavía no estabaconectado. El actuador no puede desbloquearse en esta fase, yaque todavía no está conectado físicamente a la red (relé de red).
Medida � En la aplicación, comprobar que la alimentación de la red y eldesbloqueo del regulador se efectúen consecutivamente conun breve intervalo entre sí.
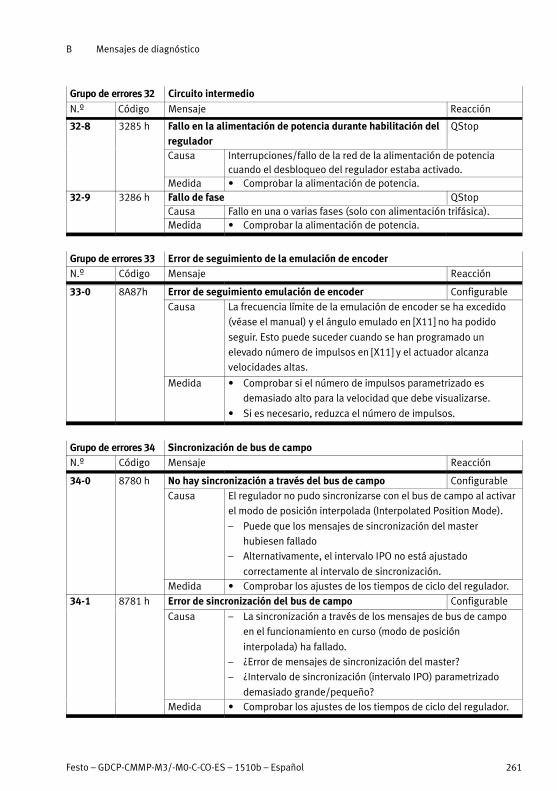
B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 261
Grupo de errores 32 Circuito intermedio
N.º ReacciónMensajeCódigo
32-8 3285 h Fallo en la alimentación de potencia durante habilitación delregulador
QStop
Causa Interrupciones/fallo de la red de la alimentación de potenciacuando el desbloqueo del regulador estaba activado.
Medida � Comprobar la alimentación de potencia.32-9 3286 h Fallo de fase QStop
Causa Fallo en una o varias fases (solo con alimentación trifásica).Medida � Comprobar la alimentación de potencia.
Grupo de errores 33 Error de seguimiento de la emulación de encoderN.º Código Mensaje Reacción
33-0 8A87h Error de seguimiento emulación de encoder Configurable
Causa La frecuencia límite de la emulación de encoder se ha excedido
(véase el manual) y el ángulo emulado en [X11] no ha podido
seguir. Esto puede suceder cuando se han programado un
elevado número de impulsos en [X11] y el actuador alcanza
velocidades altas.
Medida � Comprobar si el número de impulsos parametrizado es
demasiado alto para la velocidad que debe visualizarse.
� Si es necesario, reduzca el número de impulsos.
Grupo de errores 34 Sincronización de bus de campoN.º Código Mensaje Reacción
34-0 8780 h No hay sincronización a través del bus de campo Configurable
Causa El regulador no pudo sincronizarse con el bus de campo al activar
el modo de posición interpolada (Interpolated Position Mode).
– Puede que los mensajes de sincronización del master
hubiesen fallado
– Alternativamente, el intervalo IPO no está ajustado
correctamente al intervalo de sincronización.Medida � Comprobar los ajustes de los tiempos de ciclo del regulador.
34-1 8781 h Error de sincronización del bus de campo Configurable
Causa – La sincronización a través de los mensajes de bus de campo
en el funcionamiento en curso (modo de posición
interpolada) ha fallado.
– ¿Error de mensajes de sincronización del master?
– ¿Intervalo de sincronización (intervalo IPO) parametrizado
demasiado grande/pequeño?Medida � Comprobar los ajustes de los tiempos de ciclo del regulador.

B Mensajes de diagnóstico
262 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 35 Motor linealN.º Código Mensaje Reacción
35-0 8480 h Protección antigiro del motor lineal ConfigurableCausa Perturbación de señales del transmisor. El motor puede girar más
allá del tope porque la posición de conmutación se hadesplazado debido a las perturbaciones en las señales deltransmisor.
Medida � Comprobar las recomendaciones EMC en la instalación.� Controle la distancia mecánica en los motores lineales con
transmisores inductivos/ópticos con cinta y cabezal demedición montados aparte.
� En los motores lineales con transmisores inductivos,asegúrese de que el campo magnético de los imanes o deldevanado del motor no se extienda al cabezal de medición(este efecto se da sobre todo cuando hay aceleracioneselevadas = corriente del motor alta).
35-5 - Error en determinación de posición de conmutación ConfigurableCausa La posición del rotor no ha podido identificarse claramente.
– Puede que el procedimiento seleccionado no sea apropiado.– Puede que la corriente del motor seleccionada para la iden
tificación no esté ajustada de manera apropiada.Medida � Comprobar el método de la determinación de la posición de
conmutación � Información adicional.Informaciónadicional
Notas sobre la determinación de la posición de conmutación:a) El procedimiento de alineación es inadecuado para
actuadores fijos o de movimiento dificultoso o paraactuadores que oscilen con frecuencias bajas.
b) El procedimiento de micropasos es apropiado para motorescon y sin núcleo. Como solo pueden realizarse movimientosmuy pequeños, se sigue trabajando incluso cuando elactuador está parado en topes elásticos o está frenado perotiene capacidad para realizar un mínimo movimiento elástico.Debido a la elevada frecuencia de excitación, elprocedimiento es muy sensible a oscilaciones en el caso deactuadores mal amortiguados. En este caso puede intentarsereducir la corriente de excitación (%).
b) El procedimiento de saturación utiliza la presencia desaturación local en el hierro del motor. Recomendado para losactuadores frenados fijos. Los actuadores sin núcleo no sonapropiados para este método. Si el actuador (con núcleo) semueve demasiado al encontrar la posición de conmutación, elresultado de la medición puede desvirtuarse. En este caso,reduzca la corriente de excitación. En el caso contrario, si elactuador no se mueve, la corriente de excitación puede queno sea suficientemente fuerte y la saturación no se marcademasiado.
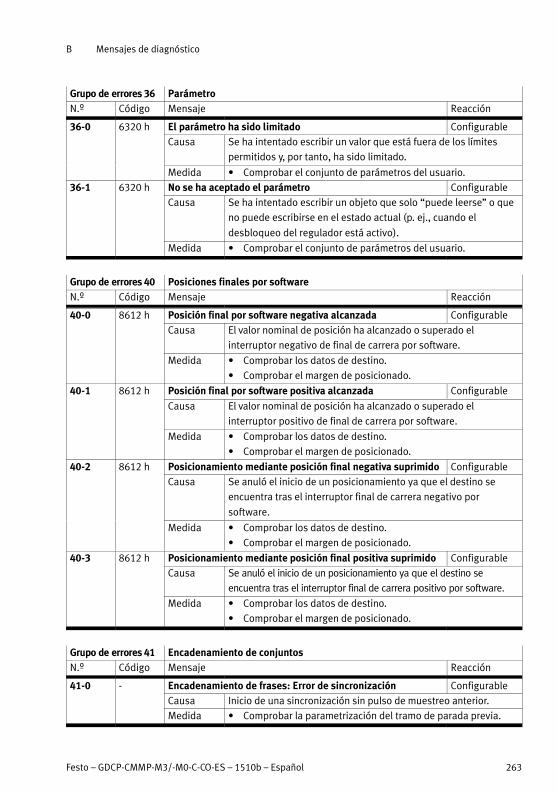
B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 263
Grupo de errores 36 ParámetroN.º Código Mensaje Reacción
36-0 6320 h El parámetro ha sido limitado Configurable
Causa Se ha intentado escribir un valor que está fuera de los límites
permitidos y, por tanto, ha sido limitado.
Medida � Comprobar el conjunto de parámetros del usuario.
36-1 6320 h No se ha aceptado el parámetro Configurable
Causa Se ha intentado escribir un objeto que solo “puede leerse” o que
no puede escribirse en el estado actual (p. ej., cuando el
desbloqueo del regulador está activo).
Medida � Comprobar el conjunto de parámetros del usuario.
Grupo de errores 40 Posiciones finales por softwareN.º Código Mensaje Reacción
40-0 8612 h Posición final por software negativa alcanzada Configurable
Causa El valor nominal de posición ha alcanzado o superado el
interruptor negativo de final de carrera por software.
Medida � Comprobar los datos de destino.
� Comprobar el margen de posicionado.
40-1 8612 h Posición final por software positiva alcanzada Configurable
Causa El valor nominal de posición ha alcanzado o superado el
interruptor positivo de final de carrera por software.
Medida � Comprobar los datos de destino.
� Comprobar el margen de posicionado.
40-2 8612 h Posicionamiento mediante posición final negativa suprimido Configurable
Causa Se anuló el inicio de un posicionamiento ya que el destino se
encuentra tras el interruptor final de carrera negativo por
software.
Medida � Comprobar los datos de destino.
� Comprobar el margen de posicionado.
40-3 8612 h Posicionamiento mediante posición final positiva suprimido Configurable
Causa Se anuló el inicio de un posicionamiento ya que el destino se
encuentra tras el interruptor final de carrera positivo por software.
Medida � Comprobar los datos de destino.
� Comprobar el margen de posicionado.
Grupo de errores 41 Encadenamiento de conjuntosN.º Código Mensaje Reacción
41-0 - Encadenamiento de frases: Error de sincronización Configurable
Causa Inicio de una sincronización sin pulso de muestreo anterior.
Medida � Comprobar la parametrización del tramo de parada previa.
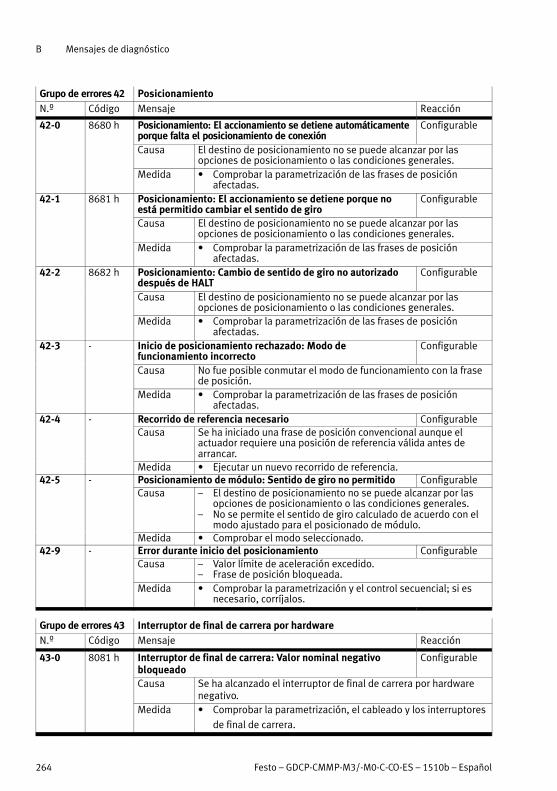
B Mensajes de diagnóstico
264 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 42 PosicionamientoN.º Código Mensaje Reacción
42-0 8680 h Posicionamiento: El accionamiento se detiene automáticamenteporque falta el posicionamiento de conexión
Configurable
Causa El destino de posicionamiento no se puede alcanzar por lasopciones de posicionamiento o las condiciones generales.
Medida � Comprobar la parametrización de las frases de posiciónafectadas.
42-1 8681 h Posicionamiento: El accionamiento se detiene porque noestá permitido cambiar el sentido de giro
Configurable
Causa El destino de posicionamiento no se puede alcanzar por lasopciones de posicionamiento o las condiciones generales.
Medida � Comprobar la parametrización de las frases de posiciónafectadas.
42-2 8682 h Posicionamiento: Cambio de sentido de giro no autorizadodespués de HALT
Configurable
Causa El destino de posicionamiento no se puede alcanzar por lasopciones de posicionamiento o las condiciones generales.
Medida � Comprobar la parametrización de las frases de posiciónafectadas.
42-3 - Inicio de posicionamiento rechazado: Modo defuncionamiento incorrecto
Configurable
Causa No fue posible conmutar el modo de funcionamiento con la frasede posición.
Medida � Comprobar la parametrización de las frases de posiciónafectadas.
42-4 - Recorrido de referencia necesario ConfigurableCausa Se ha iniciado una frase de posición convencional aunque el
actuador requiere una posición de referencia válida antes dearrancar.
Medida � Ejecutar un nuevo recorrido de referencia.42-5 - Posicionamiento de módulo: Sentido de giro no permitido Configurable
Causa – El destino de posicionamiento no se puede alcanzar por lasopciones de posicionamiento o las condiciones generales.
– No se permite el sentido de giro calculado de acuerdo con elmodo ajustado para el posicionado de módulo.
Medida � Comprobar el modo seleccionado.42-9 - Error durante inicio del posicionamiento Configurable
Causa – Valor límite de aceleración excedido.– Frase de posición bloqueada.
Medida � Comprobar la parametrización y el control secuencial; si esnecesario, corríjalos.
Grupo de errores 43 Interruptor de final de carrera por hardwareN.º Código Mensaje Reacción
43-0 8081 h Interruptor de final de carrera: Valor nominal negativobloqueado
Configurable
Causa Se ha alcanzado el interruptor de final de carrera por hardwarenegativo.
Medida � Comprobar la parametrización, el cableado y los interruptores
de final de carrera.

B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 265
Grupo de errores 43 Interruptor de final de carrera por hardware
N.º ReacciónMensajeCódigo
43-1 8082 h Interruptor de final de carrera: Valor nominal positivobloqueado
Configurable
Causa Se ha alcanzado el interruptor de final de carrera por hardwarepositivo.
Medida � Comprobar la parametrización, el cableado y los interruptores
de final de carrera.43-2 8083 h Interruptor de final de carrera: Posicionamiento suprimido Configurable
Causa – El actuador ha salido de la zona de movimiento prevista.
– ¿Avería técnica en la instalación?Medida � Comprobar la zona de movimiento prevista.
Grupo de errores 44 Discos de levaN.º Código Mensaje Reacción
44-0 - Error en las tablas de discos de leva ConfigurableCausa El disco de leva que debe ponerse en marcha no está disponible.Medida � Comprobar el nº de disco de levas transmitido.
� Corregir la parametrización.
� Corregir la programación.44-1 - Disco de leva: Error general de referenciado Configurable
Causa – Puesta en marcha de un disco de leva en el que es necesario
un recorrido de referencia, pero el actuador todavía no está
referenciado.Medida � Realice un recorrido de referencia.Causa – Inicio de un recorrido de referencia con un disco de leva activo.Medida � Desactive el disco de leva. A continuación, vuélvalo a poner
en marcha, si es necesario.
Grupo de errores 47 Puesta a puntoN.º Código Mensaje Reacción
47-0 - Tiempo excedido operación de ajuste ConfigurableCausa El número de revoluciones necesario para la operación de ajuste
no se alcanzó a tiempo.Medida Comprobar el procesamiento del requerimiento en el sistema de
mando.
Grupo de errores 48 Recorrido de referencia necesarioN.º Código Mensaje Reacción
48-0 - Recorrido de referencia necesario QStopCausa Se intenta conmutar al modo de funcionamiento “regulación de
la velocidad” o “regulación del par” o conceder la habilitación del
regulador en uno de estos modos de funcionamiento aunque el
actuador necesite para ello una posición de referencia válida.Medida � Realice un recorrido de referencia.
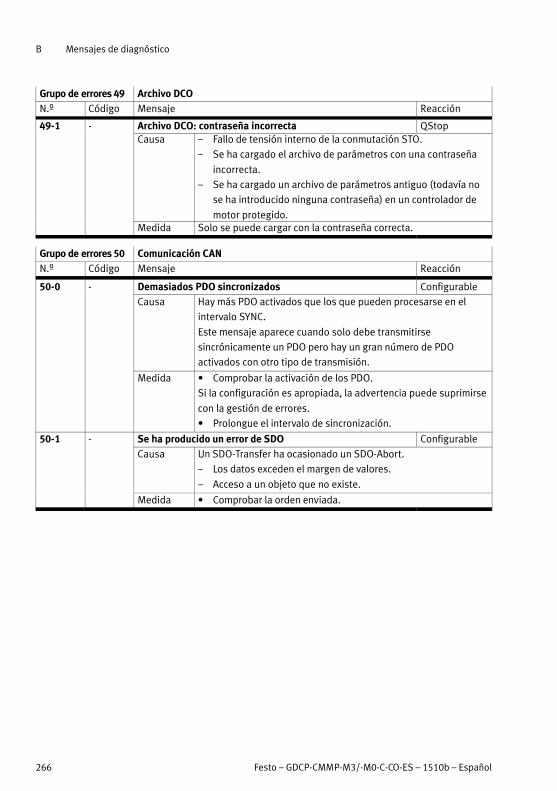
B Mensajes de diagnóstico
266 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 49 Archivo DCON.º Código Mensaje Reacción
49-1 - Archivo DCO: contraseña incorrecta QStopCausa – Fallo de tensión interno de la conmutación STO.
– Se ha cargado el archivo de parámetros con una contraseña
incorrecta.
– Se ha cargado un archivo de parámetros antiguo (todavía no
se ha introducido ninguna contraseña) en un controlador de
motor protegido.Medida Solo se puede cargar con la contraseña correcta.
Grupo de errores 50 Comunicación CANN.º Código Mensaje Reacción
50-0 - Demasiados PDO sincronizados Configurable
Causa Hay más PDO activados que los que pueden procesarse en el
intervalo SYNC.
Este mensaje aparece cuando solo debe transmitirse
sincrónicamente un PDO pero hay un gran número de PDO
activados con otro tipo de transmisión.
Medida � Comprobar la activación de los PDO.
Si la configuración es apropiada, la advertencia puede suprimirse
con la gestión de errores.
� Prolongue el intervalo de sincronización.
50-1 - Se ha producido un error de SDO Configurable
Causa Un SDO-Transfer ha ocasionado un SDO-Abort.
– Los datos exceden el margen de valores.
– Acceso a un objeto que no existe.
Medida � Comprobar la orden enviada.

B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 267
Grupo de errores 51 Módulo/Función de seguridadN.º Código Mensaje Reacción
51-0 8091 h Módulo de seguridad inexistente/desconocido oalimentación del excitador averiada
PSoff
Causa Solo CMMP-AS-...-M0: Fallo de tensión interno de la conmutación
STO.
Medida � Circuito de seguridad averiado. No hay medidas posibles,
póngase en contacto con Festo. Si es posible, sustituir el
controlador de motor por otro.Causa Solo CMMP-AS-...-M3: Módulo interno de tensión del módulo de
seguridad o del módulo de microinterruptores.Medida � Probablemente el módulo esté averiado. Si es posible,
cambiarlo por otro módulo.Causa Solo CMMP-AS-...-M3: No se ha detectado ningún módulo de
seguridad o un tipo de módulo desconocido.Medida � Montar un módulo de seguridad o de microinterruptores
adecuado para el firmware y el hardware.
� Cargar un módulo de seguridad o de microinterruptores
adecuado para el firmware; compárese la denominación del
tipo en el módulo.
51-2 8093 h Módulo de seguridad: Tipo de módulo diferente PSoffCausa El tipo o la revisión del módulo no es adecuado para la
planificación del proyecto.Medida � Comprobar si se están utilizando el tipo de módulo correcto y
la revisión correcta.
� En caso de cambio de módulo: Tipo de módulo no planificado.
Tomar el módulo de seguridad o de microinterruptores
montado actualmente como aceptado.
51-3 8094 h Módulo de seguridad: Versión del módulo diferente PSoffCausa El tipo o revisión del módulo no es compatible.Medida � Montar un módulo de seguridad o de microinterruptores
adecuado para el firmware y el hardware.
� Cargar un firmware adecuado para adecuado para el módulo;
compárese la denominación del tipo en el módulo.Causa El tipo de módulo es correcto, pero la revisión del módulo no es
compatible con la unidad básica.Medida � Comprobación de la revisión del módulo; después de la
sustitución, utilizar módulo con la misma revisión si es
posible. Montar un módulo de seguridad o de
microinterruptores adecuado para el firmware y el hardware.
� Si solo hay disponible un módulo con revisión superior:
Cargar un firmware adecuado para el módulo en la unidad
básica; véase la denominación del tipo en el módulo.

B Mensajes de diagnóstico
268 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 51 Módulo/Función de seguridad
N.º ReacciónMensajeCódigo
51-4 8095 h Módulo de seguridad: Error en la comunicación SSIO PSoffCausa Perturbación en la conexión de comunicación interna entre la
unidad básica y el módulo de seguridad.Medida � El error puede aparecer cuando en la unidad básica se ha
planificado un CAMC-G-S3 pero se ha enchufado otro tipo de
módulo.
� Cargar un módulo de seguridad o de microinterruptores
adecuado para el firmware; compárese la denominación del
tipo en el módulo.51-5 8096 h Módulo de seguridad: Error en el control de freno PSoff
Causa Error interno de hardware (señales de mando del control de
freno) del módulo de seguridad o del módulo de
microinterruptores.Medida � Probablemente el módulo esté averiado. Si es posible,
cambiarlo por otro módulo.Causa Error en la parte de conmutación del excitador del freno en la
unidad básica.Medida � Unidad básica probablemente averiada. Si es posible,
cambiarla por otra unidad básica.51-6 8097 h Módulo de seguridad: Número de serie del módulo diferente PSoff
Causa El número de serie del módulo de seguridad enchufado
actualmente es diferente al número de serie guardado.Medida El error solo aparece después de un cambio del CAMC-G-S3.
� En caso de cambio de módulo: Tipo de módulo no planificado.
Tomar módulo montado actualmente CAMC-G-S3 como
aceptado.

B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 269
Grupo de errores 52 Función de seguridadN.º Código Mensaje Reacción
52-1 8099 h Función de seguridad: Tiempo de discrepancia excedido PSoff
Causa – Las entradas de mando STO-A y STO-B no se accionan
simultáneamente.
Medida � Comprobar el tiempo de discrepancia.
Causa – Las entradas de mando STO-A y STO-B no se conmutan en el
mismo sentido.
Medida � Comprobar el tiempo de discrepancia.
Causa Alimentación OS y US no conmutadas simultáneamente
(discrepancia excedida)
– Error en control / circuito de protección externo del módulo
de seguridad.
– Error en módulo de seguridad.
Medida � Comprobar el circuito de protección del módulo de seguridad,
¿las entradas STO-A y STO-B se desconectan por dos canales
y simultáneamente?
� Sustituir el módulo de seguridad si se sospecha que está
averiado.
52-2 809Ah Función de seguridad: Fallo de la alimentación del excitadorcon activación PWM activa
PSoff
Causa Este mensaje de error no aparece en aparatos suministrados de
fábrica. Puede aparecer si se utiliza un firmware de equipo
específico del cliente.
Medida � El estado seguro se ha solicitado con el paso de salida de
potencia habilitado. Comprobar la integración en la conexión
de seguridad.
52-3 809Bh Módulo de seguridad: Límites solapados de la limitación derevoluciones en la unidad básica.
PSoff
Causa La unidad básica emite un error cuando la dirección delmovimiento solicitada actualmente no es ejecutable porque elmódulo de seguridad ha bloqueado el valor nominal en esadirección.Pueden aparecer errores en conexión con las funciones segurasde velocidad SSFx cuando se utiliza una ventana de velocidadasimétrica en la que se ha puesto a cero un límite. En este caso,el error aparece cuando la unidad básicase desplaza en la dirección bloqueada en el modo defuncionamiento posicionamiento.
Medida � Comprobar la aplicación y modificarla en caso necesario.
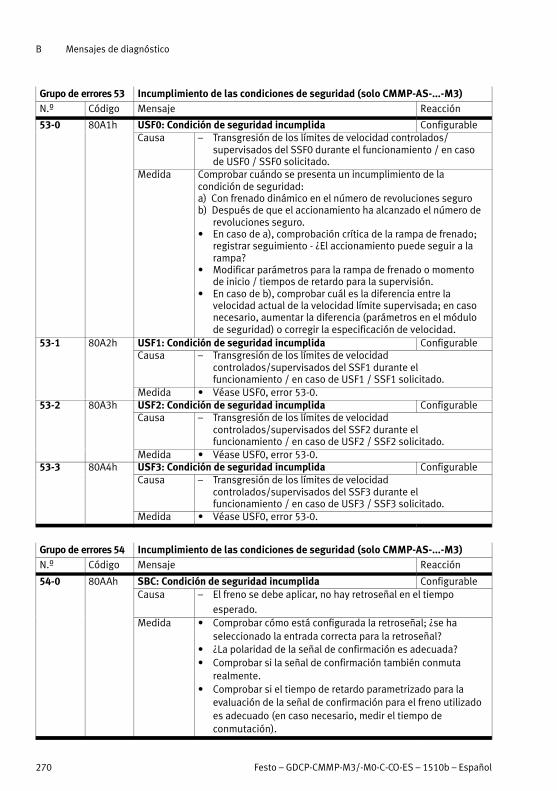
B Mensajes de diagnóstico
270 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 53 Incumplimiento de las condiciones de seguridad (solo CMMP-AS-...-M3)N.º Código Mensaje Reacción
53-0 80A1h USF0: Condición de seguridad incumplida ConfigurableCausa – Transgresión de los límites de velocidad controlados/
supervisados del SSF0 durante el funcionamiento / en casode USF0 / SSF0 solicitado.
Medida Comprobar cuándo se presenta un incumplimiento de lacondición de seguridad:a) Con frenado dinámico en el número de revoluciones segurob) Después de que el accionamiento ha alcanzado el número de
revoluciones seguro.� En caso de a), comprobación crítica de la rampa de frenado;
registrar seguimiento - ¿El accionamiento puede seguir a larampa?
� Modificar parámetros para la rampa de frenado o momentode inicio / tiempos de retardo para la supervisión.
� En caso de b), comprobar cuál es la diferencia entre lavelocidad actual de la velocidad límite supervisada; en casonecesario, aumentar la diferencia (parámetros en el módulode seguridad) o corregir la especificación de velocidad.
53-1 80A2h USF1: Condición de seguridad incumplida ConfigurableCausa – Transgresión de los límites de velocidad
controlados/supervisados del SSF1 durante elfuncionamiento / en caso de USF1 / SSF1 solicitado.
Medida � Véase USF0, error 53-0.53-2 80A3h USF2: Condición de seguridad incumplida Configurable
Causa – Transgresión de los límites de velocidadcontrolados/supervisados del SSF2 durante elfuncionamiento / en caso de USF2 / SSF2 solicitado.
Medida � Véase USF0, error 53-0.53-3 80A4h USF3: Condición de seguridad incumplida Configurable
Causa – Transgresión de los límites de velocidadcontrolados/supervisados del SSF3 durante elfuncionamiento / en caso de USF3 / SSF3 solicitado.
Medida � Véase USF0, error 53-0.
Grupo de errores 54 Incumplimiento de las condiciones de seguridad (solo CMMP-AS-...-M3)N.º Código Mensaje Reacción
54-0 80AAh SBC: Condición de seguridad incumplida ConfigurableCausa – El freno se debe aplicar, no hay retroseñal en el tiempo
esperado.Medida � Comprobar cómo está configurada la retroseñal; ¿se ha
seleccionado la entrada correcta para la retroseñal?� ¿La polaridad de la señal de confirmación es adecuada?� Comprobar si la señal de confirmación también conmuta
realmente.� Comprobar si el tiempo de retardo parametrizado para la
evaluación de la señal de confirmación para el freno utilizadoes adecuado (en caso necesario, medir el tiempo deconmutación).

B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 271
Grupo de errores 54 Incumplimiento de las condiciones de seguridad (solo CMMP-AS-...-M3)
N.º ReacciónMensajeCódigo
54-2 80ACh SS2: Condición de seguridad incumplida ConfigurableCausa – El valor efectivo de las revoluciones se encuentra demasiado
tiempo fuera de los límites permitidos.Medida Comprobar cuándo se presenta el incumplimiento de la condición
de seguridad:a) Con frenado dinámico en el cero.b) Después de que el accionamiento ha alcanzado el número de
revoluciones cero.� En caso de a), comprobar la rampa de frenado; registrar
seguimiento. ¿El accionamiento puede seguir a la rampa?Modificar parámetros para la rampa de frenado o momentode inicio / tiempos de retardo para la supervisión.
� En caso de a), si está activada la opción “Provocar la paradarápida de la unidad básica”: Comprobación crítica de larampa de parada rápida de la unidad básica.
� En caso de b), comprobar si el actuador oscila todavíadespués de alcanzar el número de revoluciones cero o estáestable; en caso necesario aumentar el tiempo tolerado de lasupervisión.
� En caso de b), si el valor efectivo en parada está muydistorsionado. Comprobar los parámetros de experto para ladetección de revoluciones y la detección de parada yadaptarlos en caso necesario.
54-3 80ADh SOS: Condición de seguridad incumplida ConfigurableCausa – La evaluación del transductor angular indica “Motor gira”
(valor efectivo de revoluciones supera el límite).
– El actuador se ha girado de su posición desde que ha
alcanzado el estado seguro.Medida � Comprobar la tolerancia de posición para la supervisión SOS,
aumentarla en caso necesario si está permitido.� Si el valor efectivo de velocidad en parada está muy
distorsionado, comprobar los parámetros de experto para ladetección de revoluciones y la detección de parada yadaptarlos en caso necesario.

B Mensajes de diagnóstico
272 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 54 Incumplimiento de las condiciones de seguridad (solo CMMP-AS-...-M3)
N.º ReacciónMensajeCódigo
54-4 80AEh SS1: Condición de seguridad incumplida ConfigurableCausa – El valor efectivo de las revoluciones se encuentra demasiado
tiempo fuera de los límites permitidos.Medida Comprobar cuándo se presenta el incumplimiento de la condición
de seguridad:a) Con frenado dinámico en el cero.b) Después de que el accionamiento ha alcanzado el número de
revoluciones cero.� En caso de a), comprobar la rampa de frenado; registrar
seguimiento. ¿El accionamiento puede seguir a la rampa?Modificar parámetros para la rampa de frenado o momentode inicio / tiempos de retardo para la supervisión.
� En caso de a), si está activada la opción “Provocar la paradarápida de la unidad básica”: Comprobación crítica de larampa de parada rápida de la unidad básica.
� En caso de b), comprobar si el actuador oscila todavíadespués de alcanzar el número de revoluciones cero o estáestable; en caso necesario aumentar el tiempo tolerado de lasupervisión.
� En caso de b), si el valor efectivo de velocidad en parada estámuy distorsionado, comprobar los parámetros de expertopara la detección de revoluciones y la detección de parada yadaptarlos en caso necesario.
54-5 80AFh STO: Condición de seguridad incumplida ConfigurableCausa – Error de hardware interno (error de tensión) del módulo de
seguridad.Medida � Probablemente el módulo esté averiado. Si es posible,
cambiarlo por otro módulo.Causa – Error en la parte de conmutación del excitador en la unidad
básica.Medida � Unidad básica probablemente averiada. Si es posible,
cambiarla por otra unidad básica.Causa – No hay retroseñal de la unidad básica que indica que el paso
de salida ha sido desconectado.Medida � Comprobar si el error puede ser validado y si vuelve a
aparecer con una nueva demanda de STO; si es así: la unidadbásica posiblemente está averiada. Si es posible, cambiarlapor otra unidad básica.
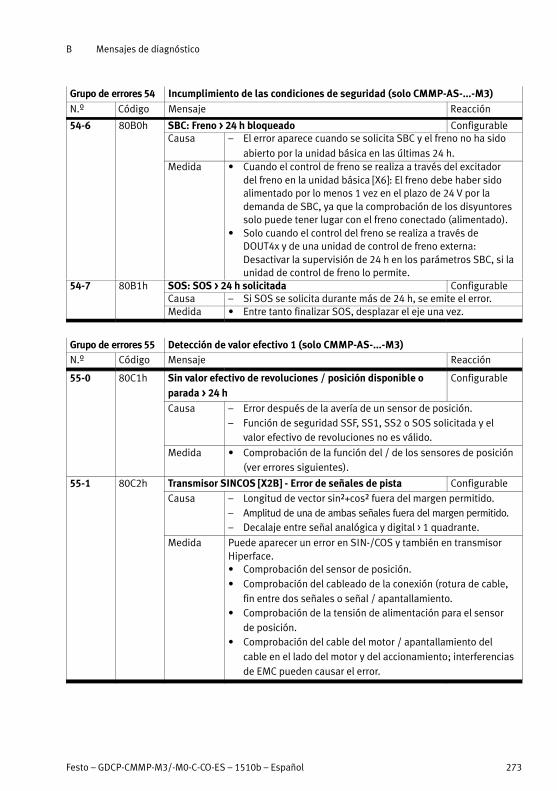
B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 273
Grupo de errores 54 Incumplimiento de las condiciones de seguridad (solo CMMP-AS-...-M3)
N.º ReacciónMensajeCódigo
54-6 80B0h SBC: Freno > 24 h bloqueado ConfigurableCausa – El error aparece cuando se solicita SBC y el freno no ha sido
abierto por la unidad básica en las últimas 24 h.Medida � Cuando el control de freno se realiza a través del excitador
del freno en la unidad básica [X6]: El freno debe haber sidoalimentado por lo menos 1 vez en el plazo de 24 V por lademanda de SBC, ya que la comprobación de los disyuntoressolo puede tener lugar con el freno conectado (alimentado).
� Solo cuando el control del freno se realiza a través deDOUT4x y de una unidad de control de freno externa:Desactivar la supervisión de 24 h en los parámetros SBC, si launidad de control de freno lo permite.
54-7 80B1h SOS: SOS > 24 h solicitada ConfigurableCausa – Si SOS se solicita durante más de 24 h, se emite el error.Medida � Entre tanto finalizar SOS, desplazar el eje una vez.
Grupo de errores 55 Detección de valor efectivo 1 (solo CMMP-AS-...-M3)N.º Código Mensaje Reacción
55-0 80C1h Sin valor efectivo de revoluciones / posición disponible oparada > 24 h
Configurable
Causa – Error después de la avería de un sensor de posición.– Función de seguridad SSF, SS1, SS2 o SOS solicitada y el
valor efectivo de revoluciones no es válido.
Medida � Comprobación de la función del / de los sensores de posición(ver errores siguientes).
55-1 80C2h Transmisor SINCOS [X2B] - Error de señales de pista Configurable
Causa – Longitud de vector sin²+cos² fuera del margen permitido.– Amplitud de una de ambas señales fuera del margen permitido.– Decalaje entre señal analógica y digital > 1 quadrante.
Medida Puede aparecer un error en SIN-/COS y también en transmisorHiperface.� Comprobación del sensor de posición.� Comprobación del cableado de la conexión (rotura de cable,
fin entre dos señales o señal / apantallamiento.� Comprobación de la tensión de alimentación para el sensor
de posición.� Comprobación del cable del motor / apantallamiento del
cable en el lado del motor y del accionamiento; interferenciasde EMC pueden causar el error.
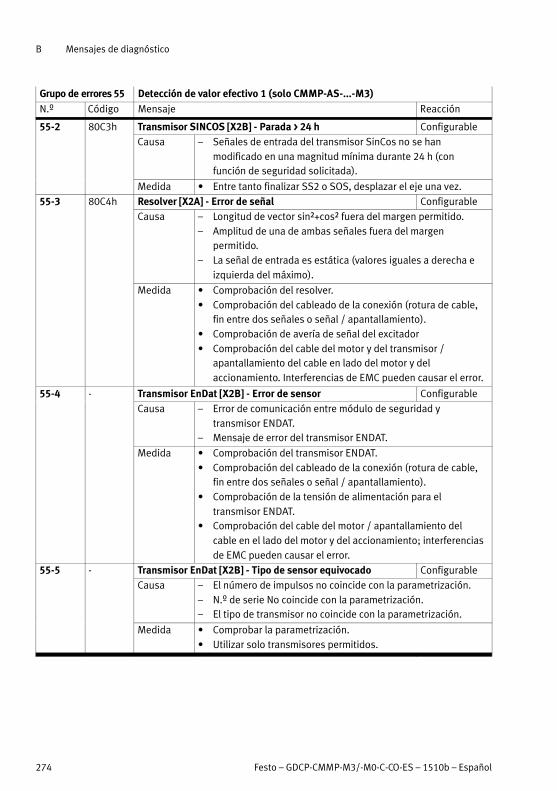
B Mensajes de diagnóstico
274 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 55 Detección de valor efectivo 1 (solo CMMP-AS-...-M3)
N.º ReacciónMensajeCódigo
55-2 80C3h Transmisor SINCOS [X2B] - Parada > 24 h Configurable
Causa – Señales de entrada del transmisor SinCos no se hanmodificado en una magnitud mínima durante 24 h (confunción de seguridad solicitada).
Medida � Entre tanto finalizar SS2 o SOS, desplazar el eje una vez.
55-3 80C4h Resolver [X2A] - Error de señal Configurable
Causa – Longitud de vector sin²+cos² fuera del margen permitido.– Amplitud de una de ambas señales fuera del margen
permitido.– La señal de entrada es estática (valores iguales a derecha e
izquierda del máximo).
Medida � Comprobación del resolver.� Comprobación del cableado de la conexión (rotura de cable,
fin entre dos señales o señal / apantallamiento).� Comprobación de avería de señal del excitador� Comprobación del cable del motor y del transmisor /
apantallamiento del cable en lado del motor y delaccionamiento. Interferencias de EMC pueden causar el error.
55-4 - Transmisor EnDat [X2B] - Error de sensor Configurable
Causa – Error de comunicación entre módulo de seguridad ytransmisor ENDAT.
– Mensaje de error del transmisor ENDAT.
Medida � Comprobación del transmisor ENDAT.� Comprobación del cableado de la conexión (rotura de cable,
fin entre dos señales o señal / apantallamiento).� Comprobación de la tensión de alimentación para el
transmisor ENDAT.� Comprobación del cable del motor / apantallamiento del
cable en el lado del motor y del accionamiento; interferenciasde EMC pueden causar el error.
55-5 - Transmisor EnDat [X2B] - Tipo de sensor equivocado Configurable
Causa – El número de impulsos no coincide con la parametrización.– N.º de serie No coincide con la parametrización.– El tipo de transmisor no coincide con la parametrización.
Medida � Comprobar la parametrización.� Utilizar solo transmisores permitidos.

B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 275
Grupo de errores 55 Detección de valor efectivo 1 (solo CMMP-AS-...-M3)
N.º ReacciónMensajeCódigo
55-6 80C5h Encoder incremental [X10] - Error de señales de pista ConfigurableCausa – Señales de pista erróneas del encoder incremental.Medida � Comprobación del cableado de la conexión (rotura de cable,
fin entre dos señales o señal / apantallamiento).� Comprobación del cable del motor / apantallamiento del
cable en el lado del motor y del accionamiento; interferenciasde EMC pueden causar el error.
55-7 80C6h Otros transmisores [X2B] - Información errónea del ángulo ConfigurableCausa – Mensaje “Ángulo erróneo” transmitido por la unidad básica
cuando el estado se pronlonga más de lo permitido.– Transmisor en X2B es evaluado por la unidad básica.– El transmisor está averiado.
Medida � Comprobación del sensor de posición en X2B.� Comprobación del cableado de la conexión (rotura de cable,
fin entre dos señales o señal / apantallamiento).� Comprobación de la tensión de alimentación para el
transmisor ENDAT.� Comprobación del cable del motor / apantallamiento del
cable en el lado del motor y del accionamiento; interferenciasde EMC pueden causar el error.
55-8 - Aceleración no permitida detectada ConfigurableCausa – Error en sensor de posición conectado.
– Interferencias de EMC que afectan al sensor de posición.– Aceleraciones elevadas no permitidas en los perfiles de
desplazamiento.– Límite de aceleración parametrizado demasiado bajo.– Discontinuidad angular después de recorrido de referencia en
los datos de posición transmitidos por la unidad básica almódulo de seguridad.
Medida � Comprobación del sensor de posición conectado: Si seemiten más mensajes de error relacionados con lostransmisores, entonces eliminar primero la causa.
� Comprobación del cable del motor y del transmisor /apantallamiento del cable en lado del motor y delaccionamiento. Interferencias de EMC pueden causar el error.
� Comprobación de los valores de consigna / perfiles dedesplazamiento del control: ¿Contienen estos aceleracioneselevadas no permitidas, que se encuentran por encima delvalor límite para la supervisión de la velocidad (P06.07)?
� Controlar si el valor límite para la supervisión de laaceleración está parametrizado correctamente; el valor límite(P06.07) debería estar como mínimo entre el 30 % y el 50 %por encima de la aceleración máxima presentada.
� Si se produce discontinuidad angular en los datos de posiciónde la unidad básica, validar el error una vez.
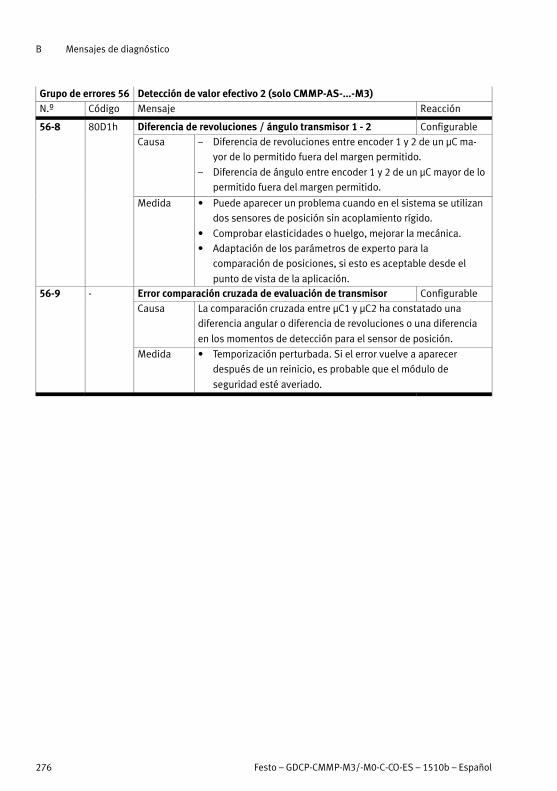
B Mensajes de diagnóstico
276 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 56 Detección de valor efectivo 2 (solo CMMP-AS-...-M3)N.º Código Mensaje Reacción
56-8 80D1h Diferencia de revoluciones / ángulo transmisor 1 - 2 Configurable
Causa – Diferencia de revoluciones entre encoder 1 y 2 de un μC ma
yor de lo permitido fuera del margen permitido.
– Diferencia de ángulo entre encoder 1 y 2 de un μC mayor de lo
permitido fuera del margen permitido.
Medida � Puede aparecer un problema cuando en el sistema se utilizan
dos sensores de posición sin acoplamiento rígido.
� Comprobar elasticidades o huelgo, mejorar la mecánica.
� Adaptación de los parámetros de experto para la
comparación de posiciones, si esto es aceptable desde el
punto de vista de la aplicación.56-9 - Error comparación cruzada de evaluación de transmisor Configurable
Causa La comparación cruzada entre μC1 y μC2 ha constatado una
diferencia angular o diferencia de revoluciones o una diferencia
en los momentos de detección para el sensor de posición.
Medida � Temporización perturbada. Si el error vuelve a aparecer
después de un reinicio, es probable que el módulo de
seguridad esté averiado.
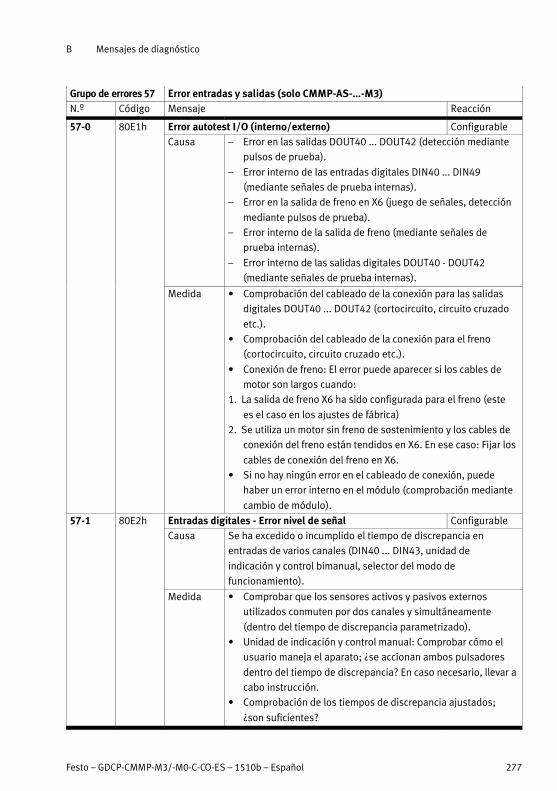
B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 277
Grupo de errores 57 Error entradas y salidas (solo CMMP-AS-...-M3)N.º Código Mensaje Reacción
57-0 80E1h Error autotest I/O (interno/externo) Configurable
Causa – Error en las salidas DOUT40 ... DOUT42 (detección mediante
pulsos de prueba).
– Error interno de las entradas digitales DIN40 ... DIN49
(mediante señales de prueba internas).
– Error en la salida de freno en X6 (juego de señales, detección
mediante pulsos de prueba).
– Error interno de la salida de freno (mediante señales de
prueba internas).
– Error interno de las salidas digitales DOUT40 - DOUT42
(mediante señales de prueba internas).
Medida � Comprobación del cableado de la conexión para las salidas
digitales DOUT40 ... DOUT42 (cortocircuito, circuito cruzado
etc.).
� Comprobación del cableado de la conexión para el freno
(cortocircuito, circuito cruzado etc.).
� Conexión de freno: El error puede aparecer si los cables de
motor son largos cuando:
1. La salida de freno X6 ha sido configurada para el freno (este
es el caso en los ajustes de fábrica)
2. Se utiliza un motor sin freno de sostenimiento y los cables de
conexión del freno están tendidos en X6. En ese caso: Fijar los
cables de conexión del freno en X6.
� Si no hay ningún error en el cableado de conexión, puede
haber un error interno en el módulo (comprobación mediante
cambio de módulo).
57-1 80E2h Entradas digitales - Error nivel de señal Configurable
Causa Se ha excedido o incumplido el tiempo de discrepancia en
entradas de varios canales (DIN40 ... DIN43, unidad de
indicación y control bimanual, selector del modo de
funcionamiento).
Medida � Comprobar que los sensores activos y pasivos externos
utilizados conmuten por dos canales y simultáneamente
(dentro del tiempo de discrepancia parametrizado).
� Unidad de indicación y control manual: Comprobar cómo el
usuario maneja el aparato; ¿se accionan ambos pulsadores
dentro del tiempo de discrepancia? En caso necesario, llevar a
cabo instrucción.
� Comprobación de los tiempos de discrepancia ajustados;
¿son suficientes?
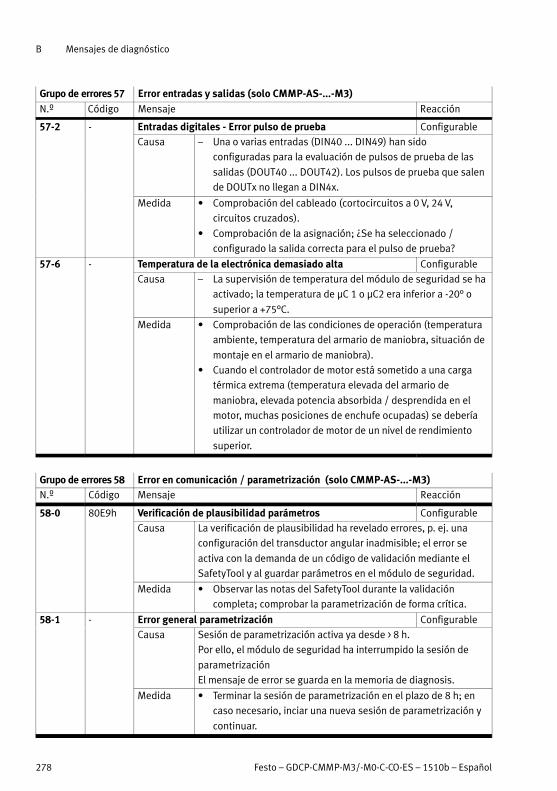
B Mensajes de diagnóstico
278 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 57 Error entradas y salidas (solo CMMP-AS-...-M3)
N.º ReacciónMensajeCódigo
57-2 - Entradas digitales - Error pulso de prueba Configurable
Causa – Una o varias entradas (DIN40 ... DIN49) han sido
configuradas para la evaluación de pulsos de prueba de las
salidas (DOUT40 ... DOUT42). Los pulsos de prueba que salen
de DOUTx no llegan a DIN4x.
Medida � Comprobación del cableado (cortocircuitos a 0 V, 24 V,
circuitos cruzados).
� Comprobación de la asignación; ¿Se ha seleccionado /
configurado la salida correcta para el pulso de prueba?
57-6 - Temperatura de la electrónica demasiado alta Configurable
Causa – La supervisión de temperatura del módulo de seguridad se ha
activado; la temperatura de μC 1 o μC2 era inferior a -20° o
superior a +75°C.
Medida � Comprobación de las condiciones de operación (temperatura
ambiente, temperatura del armario de maniobra, situación de
montaje en el armario de maniobra).
� Cuando el controlador de motor está sometido a una carga
térmica extrema (temperatura elevada del armario de
maniobra, elevada potencia absorbida / desprendida en el
motor, muchas posiciones de enchufe ocupadas) se debería
utilizar un controlador de motor de un nivel de rendimiento
superior.
Grupo de errores 58 Error en comunicación / parametrización (solo CMMP-AS-...-M3)N.º Código Mensaje Reacción
58-0 80E9h Verificación de plausibilidad parámetros Configurable
Causa La verificación de plausibilidad ha revelado errores, p. ej. una
configuración del transductor angular inadmisible; el error se
activa con la demanda de un código de validación mediante el
SafetyTool y al guardar parámetros en el módulo de seguridad.
Medida � Observar las notas del SafetyTool durante la validación
completa; comprobar la parametrización de forma crítica.
58-1 - Error general parametrización Configurable
Causa Sesión de parametrización activa ya desde > 8 h.
Por ello, el módulo de seguridad ha interrumpido la sesión de
parametrización
El mensaje de error se guarda en la memoria de diagnosis.
Medida � Terminar la sesión de parametrización en el plazo de 8 h; en
caso necesario, inciar una nueva sesión de parametrización y
continuar.

B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 279
Grupo de errores 58 Error en comunicación / parametrización (solo CMMP-AS-...-M3)
N.º ReacciónMensajeCódigo
58-4 80E9h Memoria intermedia de comunicación interna Configurable
Causa – Conexión de comunicación perturbada.
– Timeout / error de datos / secuencia equivocada (contador
de paquete) en la transmisión de datos de la unidad básica �
módulo de seguridad.
– Tráfico de datos demasiado alto, nuevas demandas enviadas
al módulo de seguridad.
Medida � Comprobación de interfaces de comunicación, cableado,
apantallamiento, etc.
� Comprobar si durante una sesión de parametrización en curso
otros aparatos tienen acceso de lectura al controlador de
motor y al módulo de seguridad, de modo que la conexión de
comunicación se pueda sobrecargar.
� Comprobar si las versiones de firmware del módulo de
seguridad, la unidad básica y la versión de revisión del plugin
FCT y de SafetyTools son compatibles.
58-5 80EAh Comunicación de módulo - Unidad básica Configurable
Causa – Error en contador de paquete al transferir μC1 <-� μC2.
– Error en suma de prueba al transferir μC1 <-� μC2.
Medida � Avería interna en el controlador de motor.
� Comprobar si las versiones de firmware del módulo de
seguridad, la unidad básica y la versión de revisión del plugin
FCT y de SafetyTools son compatibles.

B Mensajes de diagnóstico
280 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 58 Error en comunicación / parametrización (solo CMMP-AS-...-M3)
N.º ReacciónMensajeCódigo
58-6 80EBh Error comparación cruzada de procesadores 1 - 2 ConfigurableCausa Timeout comparación cruzada (no hay datos) o comparación
cruzada errónea (datos μC1 y μC2 difieren entre sí).– Error comparación cruzada de IO digitales.– Error comparación cruzada de entrada analógica.– Error comparación cruzada de medición de tensión de
funcionamiento (5 V, 3,3 V, 24 V) y tensión de referencia(2,5 V).
– Error comparación cruzada de valores analógicos detransductor angular SIN/COS.
– Error comparación cruzada de supervisión de ejecución delprograma.
– Error comparación cruzada de contador de interrupción.– Error comparación cruzada de imagen de las entradas.– Error comparación de incumplimiento de las condiciones de
seguridad.– Error comparación de medición de temperatura.
Medida Se trata de un error interno del módulo que no debería aparecerdurante el funcionamiento.� Comprobación de las condiciones de operación (temperatura,
humedad del aire, condensación).� Comprobación de EMC; cableado de acuerdo a lo prescrito,
sistema de apantallamiento, ¿existen fuentes externas deavería?
� El módulo de seguridad podría estar dañado, ¿eliminación deerrores después de cambio de módulo?
� Comprobar si el fabricante tiene disponible un nuevofirmware para el controlador de motor o una nueva versióndel módulo de seguridad.
Grupo de errores 59 Error interno del módulo de seguridad (solo CMMP-AS-...-M3)N.º Código Mensaje Reacción
59-1 80F1h Alimentación failsafe / bloqueo de impulsos seguro ConfigurableCausa – Error interno en el módulo en la parte de conmutación de
alimentación failsafe o en la alimentación del excitador parainterruptor superior o inferior.
Medida � Módulo averiado, cambiarlo.59-2 80F2h Error fuente de alimentación externa Configurable
Causa – Tensión de referencia 2,5 V fuera de la tolerancia.– Sobretensión de alimentación de la lógica de +24 V detectada.
Medida � Módulo averiado, cambiarlo.59-3 80F3h Error fuente de alimentación interna Configurable
Causa – Tensión (interna 3,3 V, 5 V, referencia ADU) fuera del margenpermitido.
Medida � Módulo averiado, cambiarlo.

B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 281
Grupo de errores 59 Error interno del módulo de seguridad (solo CMMP-AS-...-M3)
N.º ReacciónMensajeCódigo
59-4 80F4h Gestión de errores: Demasiados errores ConfigurableCausa – Se han producido demasiados errores simultáneamente.Medida � Aclaración: ¿Qué estado tiene el módulo de seguridad
montado? ¿Contiene un conjunto de parámetros válido?� Leer y analizar el archivo de registros de la unidad básica
mediante FCT.� Eliminar causas de error paso a paso.� Montar el módulo de seguridad con “estado de entrega” y
ejecutar puesta a punto de unidad básica.� Si esto no está disponible: Crear ajustes de fábrica en el
módulo de seguridad y a continuación ejecutar aceptación dedatos en la unidad básica y validación completa. Comprobarsi el error se vuelve a producir.
59-5 80F5h Error escritura memoria de diagnosis ConfigurableCausa Error que se produce cuando la comunicación interna está
perturbada.
– La unidad básica no está preparada para funcionar, averiadao error de memoria.
Medida � Comprobar funcionamiento de unidad básica� Generar un error en la unidad básica, p. ej. extraer conector
del sensor de posición y comprobar si la unidad básicaescribe un registro en el archivo de registro.
� Módulo o unidad básica averiados, cambiarlos.59-6 80F6h Error al guarda conjunto de parámetros Configurable
Causa – Interrupción de tensión / Power Off mientras se guardabanlos parámetros.
Medida � Mantener alimentación de 24 V durante toda la sesión deparametrización.
� Después de que se produce el error, volver a parametrizar elmódulo y volver a validar el conjunto de parámetros.
59-7 80F7h Error suma de prueba FLASH Configurable
Causa – Interrupción de tensión / Power Off mientras se guardabanlos parámetros.
– Memoria FLASH en el módulo de seguridad corrupta (p. ej.debido a graves perturbaciones).
Medida Comprobar si el error se vuelve a producir después de un reinicio;
si es así
� Volver a parametrizar el módulo y volver a validar el conjuntode parámetros; si el error persiste:
� Módulo averiado, cambiarlo.

B Mensajes de diagnóstico
282 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 59 Error interno del módulo de seguridad (solo CMMP-AS-...-M3)
N.º ReacciónMensajeCódigo
59-8 80F8h Supervisión interna procesador 1 - 2 Configurable
Causa – Error interno grave en el módulo de seguridad: Se hadetectado un error durante la dinamización de señalesinternas
– Ejecución del programa perturbada, error Stack o fallo enprueba de opcode, excepción / interrupción procesador.
Medida Comprobar si el error se vuelve a producir después de un reinicio;
si es así
� Módulo averiado, cambiarlo.
59-9 80F9h Otros errores inesperados Configurable
Causa Activación de la supervisión de ejecución del programa.
Medida � Comprobación de las versiones de firmware de la unidadbásica y de la revisión del módulo de seguridad.¿Actualización disponible?
� Módulo de seguridad averiado, cambiarlo.
Grupo de errores 62 EtherCAT (solo CMMP-AS-...-M3)
N.º Código Mensaje Reacción
62-0 - EtherCAT: Error general de bus ConfigurableCausa No hay un bus EtherCAT.Medida � Conectar el master EtherCAT.
� Comprobar el cableado.62-1 - EtherCAT: Error de inicialización Configurable
Causa Error de hardware.Medida � Sustituir la interfaz y enviar al fabricante para su
comprobación.62-2 - EtherCAT: Error de protocolo Configurable
Causa No se utiliza CAN over EtherCAT.Medida � Protocolo equivocado.
� Fallos en el cableado del bus EtherCAT.62-3 - EtherCAT: Longitud incorrecta de RPDO Configurable
Causa La memoria intermedia de Sync Manager 2 es demasiado grande.Medida � Comprobar la configuración de RPDO del controlador de
motor y del control.62-4 - EtherCAT: Longitud de TPDO no válida Configurable
Causa La memoria intermedia de Sync Manager 3 es demasiado grande.Medida � Comprobar la configuración de TPDO del controlador de
motor y del control.62-5 - EtherCAT: Transmisión cíclica de datos errónea Configurable
Causa Desconexión de la seguridad debido al fallo de la transmisión
cíclica de datos.Medida � Comprobar la configuración del master. La transmisión
síncrona no es estable.

B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 283
Grupo de errores 63 EtherCAT (solo CMMP-AS-...-M3)N.º Código Mensaje Reacción
63-0 - EtherCAT: Módulo averiado Configurable
Causa Error de hardware.
Medida � Sustituir la interfaz y enviar al fabricante para su
comprobación.
63-1 - EtherCAT: Datos no válidos Configurable
Causa Tipo de telegrama erróneo.
Medida � Comprobar el cableado.
63-2 - EtherCAT: No se han leído los datos TPDO Configurable
Causa La memoria intermedia para el envío de datos está llena.
Medida La velocidad de envío de los datos es mayor de la que es capaz
de procesar el controlador de motor.
� Reduzca el tiempo de ciclo del bus EtherCAT.
63-3 - EtherCAT: No hay Distributed Clocks activos Configurable
Causa Advertencia: El firmware se sincroniza con el telegrama y no con
el sistema Distributed Clocks. Al iniciar el EtherCAT no se
encontró ningún hardware SYNC (Distributed Clocks). El firmware
se sincroniza a la trama de EtherCAT.
Medida � Si es necesario, comprobar que el master soporta la
característica “Distributed Clocks”.
� En otro caso: Cerciorarse de que las tramas EtherCAT no sufran
interferencias de otras tramas cuando se utilice el modo de
posición de interpolación (Interpolated Position Mode).
63-4 - EtherCAT: Falta un mensaje SYNC en el ciclo IPO Configurable
Causa No se envía en la retícula de tiempo del telegrama IPO.
Medida � Comprobar el participante responsable de Distributed Clocks.
Grupo de errores 64 DeviceNet (solo CMMP-AS-...-M3)N.º Código Mensaje Reacción
64-0 - DeviceNet: MAC ID doble Configurable
Causa El Duplicate MAC-ID Check ha encontrado dos nodos con la
misma MAC-ID.
Medida � Modifique la MAC-ID de un nodo con un valor no utilizado.
64-1 - DeviceNet: Falta tensión del bus Configurable
Causa La interfaz DeviceNet no recibe alimentación 24 V DC.
Medida � La interfaz DeviceNet debe conectarse también a 24 V DC
además de al controlador de motor.
64-2 - DeviceNet: Memoria intermedia de recepción desbordada Configurable
Causa Demasiados mensajes recibidos en poco tiempo.
Medida � Reduzca la frecuencia de exploración.
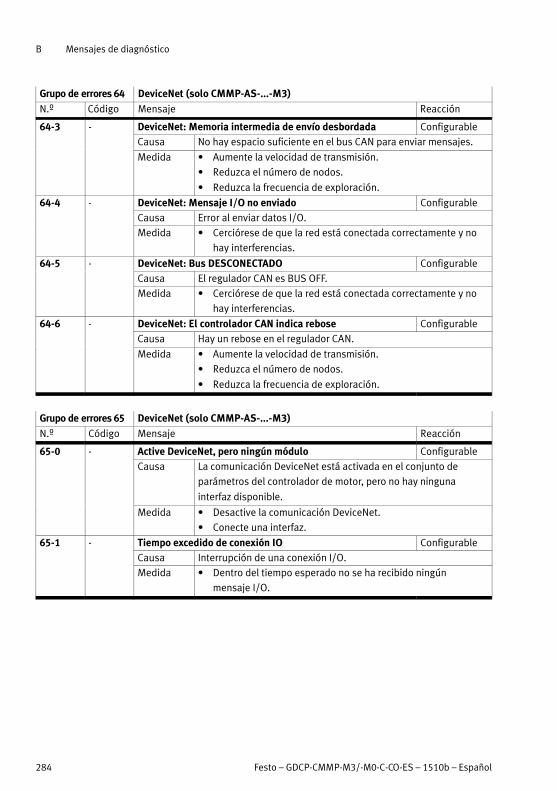
B Mensajes de diagnóstico
284 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 64 DeviceNet (solo CMMP-AS-...-M3)
N.º ReacciónMensajeCódigo
64-3 - DeviceNet: Memoria intermedia de envío desbordada Configurable
Causa No hay espacio suficiente en el bus CAN para enviar mensajes.
Medida � Aumente la velocidad de transmisión.
� Reduzca el número de nodos.
� Reduzca la frecuencia de exploración.
64-4 - DeviceNet: Mensaje I/O no enviado Configurable
Causa Error al enviar datos I/O.
Medida � Cerciórese de que la red está conectada correctamente y no
hay interferencias.
64-5 - DeviceNet: Bus DESCONECTADO Configurable
Causa El regulador CAN es BUS OFF.
Medida � Cerciórese de que la red está conectada correctamente y no
hay interferencias.
64-6 - DeviceNet: El controlador CAN indica rebose Configurable
Causa Hay un rebose en el regulador CAN.
Medida � Aumente la velocidad de transmisión.
� Reduzca el número de nodos.
� Reduzca la frecuencia de exploración.
Grupo de errores 65 DeviceNet (solo CMMP-AS-...-M3)
N.º Código Mensaje Reacción
65-0 - Active DeviceNet, pero ningún módulo Configurable
Causa La comunicación DeviceNet está activada en el conjunto de
parámetros del controlador de motor, pero no hay ninguna
interfaz disponible.
Medida � Desactive la comunicación DeviceNet.
� Conecte una interfaz.
65-1 - Tiempo excedido de conexión IO Configurable
Causa Interrupción de una conexión I/O.
Medida � Dentro del tiempo esperado no se ha recibido ningún
mensaje I/O.

B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 285
Grupo de errores 66 Modbus/TCPN.º Código Mensaje Reacción
66-0 - Modbus/TCP: No hay instancias TCP/IP libres Warn
Causa Ethernet Stack no puede poner a disposición la conexión TCP
solicitada. Fallo interno del equipo.
Medida � Reiniciar el equipo o restablecer los ajustes de fábrica.
� Si el error se produce persistentemente, el hardware está
averiado. No se puede reparar in situ.
Grupo de errores 67 Modbus/TCP
N.º Código Mensaje Reacción
67-0 - Modbus/TCP: Tiempo excedido TCP/IP Configurable
Causa Se ha interrumpido la conexión TCP existente entre host y
controlador.
Medida � ¿El cable Ethernet está bien enchufado? ¿El host está des
conectado o no se puede localizar?
67-1 - Modbus/TCP: Tiempo excedido Modbus TCP/IP Configurable
Causa La conexión TCP entre host y controlador todavía existe, pero el
host ya no envía datos.
Medida � ¿Host bloqueado?
67-2 - Modbus/TCP: Rebose de la memoria intermedia Configurable
Causa Memoria intermedia interna para procesamiento de datos llena.
El host envía los datos a una velocidad mayor de la que es capaz
de procesar el controlador.
Medida � Reducir tiempo de actualización del host.
67-3 - Modbus/TCP: Longitud del telegrama demasiado corta Configurable
Causa Los datos transmitidos por el host son demasiado cortos. El host
envía menos datos de los esperados por el controlador.
Medida � Corregir longitud de datos en el host.
67-4 - Modbus/TCP: Longitud del telegrama demasiado larga Configurable
Causa Los datos transmitidos por el host son demasiado largos. El host
envía más datos de los esperados por el controlador.
Medida � Corregir longitud de datos en el host.

B Mensajes de diagnóstico
286 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 68 EtherNet/IP (solo CMMP-AS-...-M3)N.º Código Mensaje Reacción
68-0 - EtherNet/IP: Error grave Configurable
Causa Se ha producido un error interno. Este puede originarse, p. ej. a
causa de una interfaz averiada.
Medida � Intente validar el error.
� Ejecute un reinicio.
� Sustituya la interfaz.
� Si el error persiste, póngase en contacto con el soporte técnico.
68-1 - EtherNet/IP: Error general de comunicación Configurable
Causa Se ha detectado un error grave en la interfaz EtherNet/IP.
Medida � Intente validar el error.
� Ejecute un reinicio.
� Sustituya la interfaz.
� Si el error persiste, póngase en contacto con el soporte técnico.
68-2 - EtherNet/IP: Conexión cerrada Configurable
Causa La conexión ha sido cerrada por el control.
Medida Es necesario establecer una nueva conexión con el control.
68-3 - EtherNet/IP: Interrupción de la conexión Configurable
Causa Durante el funcionamiento se ha interrumpido la conexión.
Medida � Comprobar el cableado entre el controlador de motor y el
control.
� Establezca una nueva conexión con el control.
68-5 - EtherNet/IP: Dirección de red doble Configurable
Causa En la red se encuentra como mínimo un equipo con la misma
dirección IP.
Medida � Utilice direcciones IP inequívocas para todos los equipos de
la red.
Grupo de errores 69 EtherNet/IP (solo CMMP-AS-...-M3)N.º Código Mensaje Reacción
69-0 - EtherNet/IP: Error leve Configurable
Causa Se ha detectado un error leve en la interfaz EtherNet/IP.
Medida � Intente validar el error.
� Ejecute un reinicio.
69-1 - EtherNet/IP: Configuración IP equivocada Configurable
Causa Se ha detectado una configuración IP equivocada.
Medida � Corregir la configuración IP.

B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 287
Grupo de errores 69 EtherNet/IP (solo CMMP-AS-...-M3)
N.º ReacciónMensajeCódigo
69-2 - EtherNet/IP: No se ha encontrado el módulo de bus de campo
Configurable
Causa En la ranura de conexión no hay ninguna interfaz EtherNet/IP.
Medida � Comprobar si en la ranura de conexión Ext2 se encuentra una
interfaz EtherNet/IP.
69-3 - EtherNet/IP: Versión de módulo no compatible Configurable
Causa En la ranura de conexión se encuentra una interfaz EtherNet/IP
con una versión incompatible.
Medida � Ejecute una actualización del firmware a la versión más actual
del firmware para el controlador de motor.
Grupo de errores 70 Protocol FHPPN.º Código Mensaje Reacción
70-1 - FHPP: Error matemático Configurable
Causa Rebose/flujo insuficiente o división entre cero durante el cálculo
de datos cíclicos.
Medida � Comprobar los datos cíclicos.
� Comprobar el Factor Group.
70-2 - FHPP: Factor Group inadmisible Configurable
Causa El cálculo del Factor Group da valores no válidos.
Medida � Comprobar el Factor Group.
70-3 - FHPP: Cambio inadmisible de modo de funcionamiento Configurable
Causa El cambio del modo de funcionamiento actual al modo deseado
no está permitido.
– El error aparece cuando se cambian los bits OPM en el estado
S5 'Reaction to fault' o S4 'Operation enabled'.
– Excepción: En el estado SA1 'Ready' está permitido el cambio
entre 'Record select' y 'Direct Mode'.
Medida � Comprobar la aplicación. Es posible que no todos los cambios
estén permitidos.
Grupo de errores 71 Protocol FHPP
N.º Código Mensaje Reacción
71-1 - FHPP: Longitud de telegrama de recepción equivocada Configurable
Causa El control no transmite datos suficientes (longitud de datos
demasiado corta).
Medida � Comprobar la longitud de los datos parametrizados en el
control para el telegrama de recepción del controlador.
� Comprobar la longitud de los datos configurados en el editor
FHPP+ editor de FCT.

B Mensajes de diagnóstico
288 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 71 Protocol FHPP
N.º ReacciónMensajeCódigo
71-2 - FHPP: Longitud de telegrama de respuesta equivocada Configurable
Causa El controlador de motor debe transmitir demasiados datos al
control (longitud de datos demasiado larga).
Medida � Comprobar la longitud de los datos parametrizados en el
control para el telegrama de recepción del controlador.
� Comprobar la longitud de los datos configurados en el editor
FHPP+ editor de FCT.
Grupo de errores 72 PROFINET (solo CMMP-AS-...-M3)
N.º Código Mensaje Reacción
72-0 - PROFINET: Inicialización errónea Configurable
Causa Es posible que la interfaz no contenga una versión Stack o esté
averiada.
Medida � Cambiar la interfaz.
72-1 - PROFINET: Error de bus Configurable
Causa No es posible ninguna comunicación (p. ej. se ha extraído el cable).
Medida � Comprobar el cableado
� Iniciar de nuevo la comunicación PROFINET.
72-3 - PROFINET: Configuración IP no válida Configurable
Causa Se ha introducido en la interfaz una configuración IP no válida.
Con esta configuración la interfaz no puede ponerse en marcha.
Medida � Parametrizar a través de FCT una configuración IP admisible.
72-4 - PROFINET: Nombre de equipo no válido Configurable
Causa Se ha asignado un nombre de equipo PROFINET con el que el
controlador no se puede comunicar en PROFINET (asignación de
signos de la norma PROFINET).
Medida � Parametrizar a través de FCT un nombre de equipo PROFINET
admisible.
72-5 - PROFINET: Módulo averiado Configurable
Causa Interfaz CAMC-F-PC averiada.
Medida � Cambiar la interfaz.
72-6 - PROFINET: Indicación no válida/no compatible Configurable
Causa Ha llegado un mensaje de la interfaz PROFINET que no es
compatible con el controlador de motor.
Medida � Contactar con el soporte técnico.

B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 289
Grupo de errores 73 PROFINET (solo CMMP-AS-...-M3)N.º Código Mensaje Reacción
73-0 - PROFIenergy: Estado no posible Configurable
Causa Se ha intentado poner el controlador en el estado de ahorro de
energía en un movimiento de posicionamiento. Esto solo es
posible en estado de parada. El actuador no acepta el estado y
continúa con el posicionamiento.
Medida –
Grupo de errores 78 Comunicación NRT (solo CMMP-AS-...-M3)
N.º Código Mensaje Reacción
78-0 - No se ha podido enviar un frame NRT Configurable
Causa Debido a la elevada carga del bus no se ha podido enviar un
frame NRT.
Medida � Desconectar en su caso otros componentes del bus durante
la parametrización, o separar del bus.
Grupo de errores 80 Rebose de IRQ
N.º Código Mensaje Reacción
80-0 F080h Rebose de regulador de corriente, IRQ PSoff
Causa No se ha podido calcular los datos de proceso en el ciclo de
interpolación/posición/velocidad/corriente ajustado.
Medida � Contactar con el soporte técnico.
80-1 F081h Rebose de regulador del número de revoluciones, IRQ PSoff
Causa No se ha podido calcular los datos de proceso en el ciclo de
interpolación/posición/velocidad/corriente ajustado.
Medida � Contactar con el soporte técnico.
80-2 F082h Rebose de controlador de posición, IRQ PSoff
Causa No se ha podido calcular los datos de proceso en el ciclo de
interpolación/posición/velocidad/corriente ajustado.
Medida � Contactar con el soporte técnico.
80-3 F083h Rebose de interpolador, IRQ PSoff
Causa No se ha podido calcular los datos de proceso en el ciclo de
interpolación/posición/velocidad/corriente ajustado.
Medida � Contactar con el soporte técnico.

B Mensajes de diagnóstico
290 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 81 Rebose de IRQN.º Código Mensaje Reacción
81-4 F084h Rebose de Low-Level, IRQ PSoff
Causa No se ha podido calcular los datos de proceso en el ciclo de
interpolación/posición/velocidad/corriente ajustado.
Medida � Contactar con el soporte técnico.
81-5 F085h Rebose de MDC de IRQ PSoff
Causa No se ha podido calcular los datos de proceso en el ciclo de
interpolación/posición/velocidad/corriente ajustado.
Medida � Contactar con el soporte técnico.
Grupo de errores 82 Control secuencial internoN.º Código Mensaje Reacción
82-0 - Control secuencial interno: Evento Configurable
Causa Rebose de IRQ4 (10 ms Low-Level IRQ).
Medida � Control secuencial interno: El proceso se ha interrumpido.
� Solo a modo de información - No se requiere tomar medidas.
82-1 - Acceso de escritura KO iniciado varias veces Configurable
Causa Se utilizan parámetros en funcionamiento cíclico y acíclico
concurrentemente.
Medida � Solo está permitida una interfaz de parametrización (USB o
Ethernet).
Grupo de errores 83 Módulos en Ext1/Ext2 (solo CMMP-AS-...-M3)N.º Código Mensaje Reacción
83-0 - Módulo no válido Configurable
Causa – La interfaz insertada no se reconoce.
– Firmware cargado desconocido.
– Puede que haya una interfaz compatible en la posición de
enchufe equivocada (p.ej., SERCOS 2, EtherCAT).
Medida � Comprobar en el firmware si la interfaz es compatible. En caso
afirmativo:
� Comprobar si la interfaz está insertada correctamente en la
posición adecuada.
� Cambiar la interfaz y/o el firmware.
83-1 - Módulo no compatible Configurable
Causa La interfaz insertada se ha detectado pero no es compatible con
el firmware cargado.
Medida � Comprobar en el firmware si la interfaz es compatible.
� Si es necesario, sustituya el firmware.
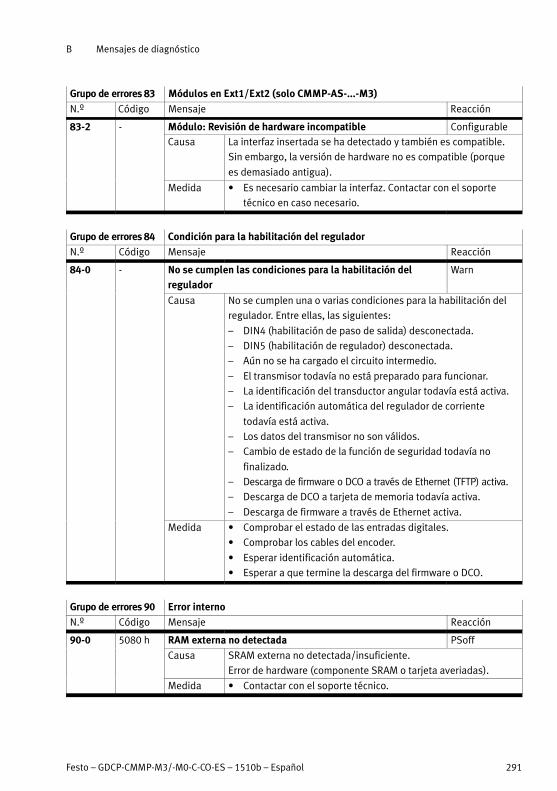
B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 291
Grupo de errores 83 Módulos en Ext1/Ext2 (solo CMMP-AS-...-M3)
N.º ReacciónMensajeCódigo
83-2 - Módulo: Revisión de hardware incompatible Configurable
Causa La interfaz insertada se ha detectado y también es compatible.
Sin embargo, la versión de hardware no es compatible (porque
es demasiado antigua).
Medida � Es necesario cambiar la interfaz. Contactar con el soporte
técnico en caso necesario.
Grupo de errores 84 Condición para la habilitación del regulador
N.º Código Mensaje Reacción
84-0 - No se cumplen las condiciones para la habilitación delregulador
Warn
Causa No se cumplen una o varias condiciones para la habilitación del
regulador. Entre ellas, las siguientes:
– DIN4 (habilitación de paso de salida) desconectada.
– DIN5 (habilitación de regulador) desconectada.
– Aún no se ha cargado el circuito intermedio.
– El transmisor todavía no está preparado para funcionar.
– La identificación del transductor angular todavía está activa.
– La identificación automática del regulador de corriente
todavía está activa.
– Los datos del transmisor no son válidos.
– Cambio de estado de la función de seguridad todavía no
finalizado.
– Descarga de firmware o DCO a través de Ethernet (TFTP) activa.
– Descarga de DCO a tarjeta de memoria todavía activa.
– Descarga de firmware a través de Ethernet activa.
Medida � Comprobar el estado de las entradas digitales.
� Comprobar los cables del encoder.
� Esperar identificación automática.
� Esperar a que termine la descarga del firmware o DCO.
Grupo de errores 90 Error interno
N.º Código Mensaje Reacción
90-0 5080 h RAM externa no detectada PSoff
Causa SRAM externa no detectada/insuficiente.
Error de hardware (componente SRAM o tarjeta averiadas).
Medida � Contactar con el soporte técnico.

B Mensajes de diagnóstico
292 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Grupo de errores 90 Error interno
N.º ReacciónMensajeCódigo
90-2 5080 h Error durante la carga de FPGA PSoff
Causa No puede cargarse el FPGA (hardware). El FPGA se carga
serialmente después de iniciar el equipo, pero en esta ocasión no ha
podido cargarse con datos o ha señalado un error suma de prueba.
Medida � Volver a conectar el equipo (24 V). Si el error se repite, el
hardware está averiado.
90-3 5080 h Error durante inicio de SD-ADU PSoff
Causa Las SD-ADU (hardware) no pueden iniciarse. Una o varias
SD-ADU no emiten datos seriales.
Medida � Volver a conectar el equipo (24 V). Si el error se repite, el
hardware está averiado.90-4 5080 h Error de sincronización de SD-ADU tras inicio PSoff
Causa SD-ADU (hardware) no sincrónica tras el inicio. Durante el
servicio, las SD-ADU para las señales del resolver siguen
funcionando sincrónicamente una vez iniciadas sincrónicamente.
En la fase de inicio no ha sido posible iniciar las SD-ADU
simultáneamente.
Medida � Volver a conectar el equipo (24 V). Si el error se repite, el
hardware está averiado.90-5 5080 h SD-ADU no sincrónica PSoff
Causa SD-ADU (hardware) no sincrónica tras el inicio. Durante el
servicio, las SD-ADU para las señales del resolver siguen
funcionando sincrónicamente una vez iniciadas sincrónicamente.
Esto se comprueba continuamente durante el funcionamiento y,
dado el caso, se ha activado un error.
Medida � Posiblemente un acoplamiento EMC masivo.
� Volver a conectar el equipo (24 V). Si el error se repite, el
hardware está averiado.90-6 5080 h IRQ0 (regulador de corriente): Error de iniciador PSoff
Causa La etapa de salida no activa la IRQ de software que maneja el
regulador de corriente. Con gran probabilidad hay un error de
hardware en la tarjeta o en el procesador.Medida � Volver a conectar el equipo (24 V). Si el error se repite, el
hardware está averiado.90-9 5080 h Versión de firmware ilegal PSoff
Causa Una de las versiones de desarrollo compiladas para el depurador
se ha cargado normalmente.Medida � Comprobar la versión de firmware. Si es necesario, actualícelo.

B Mensajes de diagnóstico
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 293
Grupo de errores 91 Error de inicializaciónN.º Código Mensaje Reacción
91-0 6000 h Error interno de inicialización PSoff
Causa SRAM interna demasiado pequeña para el firmware compilado.
Solo puede aparecer en versiones en desarrollo.
Medida � Comprobar la versión de firmware. Si es necesario, actualícelo.
91-1 - Error de memoria al copiar PSoff
Causa Los componentes del firmware no se han copiado correctamente
de la memoria flash externa a la memoria RAM interna durante el
arranque.
Medida � Volver a conectar el equipo (24 V). Si el error persiste,
comprobar la versión de firmware y Actualizarlo si es
necesario.
91-2 - Error al leer la codificación del controlador/potencia PSoff
Causa La ID-EEPROM en el controlador o en la unidad de potencia no se
ha podido activar o no tiene datos consistentes.
Medida � Volver a conectar el equipo (24 V). Si el error se repite, el
hardware está averiado. No es posible repararlo.
91-3 - Error de inicialización PSoff
Causa Uno de los siguientes componentes falta o no se ha podido iniciar:
a) No hay Shared Memory o está defectuosa.
b) No hay biblioteca de controlador o está defectuosa.
Medida � Comprobar la versión del software y actualizarlo si es
necesario.
Grupo de errores 91 Actualización del cargador de arranque/firmwareN.º Código Mensaje Reacción
92-0 6000 h Error al descargar el firmware PSoff
Causa Error durante la descarga de firmware solicitada.
Medida � Comprobar el archivo de firmware.
� Volver a iniciar la descarga de firmware.
92-1 - Error al actualizar el cargador de arranque PSoff
Causa Error durante la descarga de cargador de arranque solicitada.
Medida � Volver a iniciar la descarga del cargador de arranque.
� Enviar el equipo al fabricante para su comprobación.
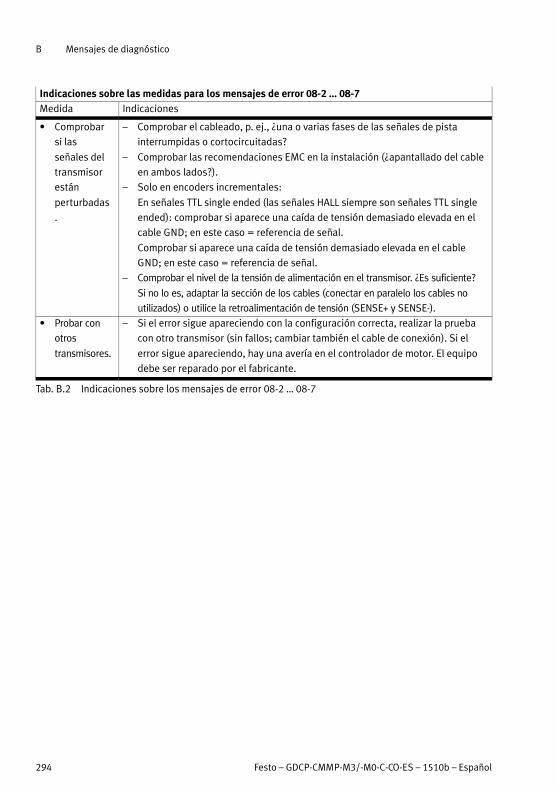
B Mensajes de diagnóstico
294 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Indicaciones sobre las medidas para los mensajes de error 08-2 … 08-7Medida Indicaciones
� Comprobar
si las
señales del
transmisor
están
perturbadas
.
– Comprobar el cableado, p. ej., ¿una o varias fases de las señales de pista
interrumpidas o cortocircuitadas?
– Comprobar las recomendaciones EMC en la instalación (¿apantallado del cable
en ambos lados?).
– Solo en encoders incrementales:
En señales TTL single ended (las señales HALL siempre son señales TTL single
ended): comprobar si aparece una caída de tensión demasiado elevada en el
cable GND; en este caso = referencia de señal.
Comprobar si aparece una caída de tensión demasiado elevada en el cable
GND; en este caso = referencia de señal.
– Comprobar el nivel de la tensión de alimentación en el transmisor. ¿Es suficiente?
Si no lo es, adaptar la sección de los cables (conectar en paralelo los cables no
utilizados) o utilice la retroalimentación de tensión (SENSE+ y SENSE-).
� Probar con
otros
transmisores.
– Si el error sigue apareciendo con la configuración correcta, realizar la prueba
con otro transmisor (sin fallos; cambiar también el cable de conexión). Si el
error sigue apareciendo, hay una avería en el controlador de motor. El equipo
debe ser reparado por el fabricante.
Tab. B.2 Indicaciones sobre los mensajes de error 08-2 … 08-7
CMMP‐AS‐...‐M3/-M0
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 295
Índice
Aacceleration_factor 88. . . . . . . . . . . . . . . . . . . . .
Aceleración
– Frenado (posicionar) 197. . . . . . . . . . . . . . . . .
– Parada rápida (posicionar) 198. . . . . . . . . . . .
Aceleración de frenado al posicionar 197. . . . . .
Aceleración de parada rápida 198. . . . . . . . . . . .
Activar error iit 103. . . . . . . . . . . . . . . . . . . . . . . .
Activar la supervisión de subtensión 97. . . . . . . .
actual_dc_link_circuit_voltage 95. . . . . . . . . . . .
actual_size 207. . . . . . . . . . . . . . . . . . . . . . . . . . .
Ajustar parámetros 76. . . . . . . . . . . . . . . . . . . . .
Ajuste del modo de funcionamiento 182. . . . . . .
Alimentación máx. circuito intermedio 96. . . . . .
Alimentación mín. circuito intermedio 96. . . . . . .
Amplificación del regulador de corriente 106. . . .
Amplificación del regulador de posición 113. . . .
analog_input_offset 134. . . . . . . . . . . . . . . . . . . .
analog_input_offset_ch_0 134. . . . . . . . . . . . . . .
analog_input_offset_ch_1 134. . . . . . . . . . . . . . .
analog_input_offset_ch_2 135. . . . . . . . . . . . . . .
analog_input_voltage 133. . . . . . . . . . . . . . . . . .
analog_input_voltage_ch_0 133. . . . . . . . . . . . .
analog_input_voltage_ch_1 133. . . . . . . . . . . . .
analog_input_voltage_ch_2 134. . . . . . . . . . . . .
Ángulo offset del resolver 104. . . . . . . . . . . . . . .
Asistencia técnica 7. . . . . . . . . . . . . . . . . . . . . . .
Bbrake_delay_time 148. . . . . . . . . . . . . . . . . . . . .
buffer_clear 208. . . . . . . . . . . . . . . . . . . . . . . . . .
buffer_organisation 207. . . . . . . . . . . . . . . . . . . .
buffer_position 207. . . . . . . . . . . . . . . . . . . . . . .
CCarga I2t 102. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Cargar los parámetros por defecto 78. . . . . . . . .
cob_id_sync 36. . . . . . . . . . . . . . . . . . . . . . . . . . .
cob_id_used_by_pdo 30. . . . . . . . . . . . . . . . . . .
Código de producto 149. . . . . . . . . . . . . . . . . . . .
Código del fabricante 148. . . . . . . . . . . . . . . . . . .
commisioning_state 153. . . . . . . . . . . . . . . . . . . .
Comportamiento con la orden
– disable operation 180. . . . . . . . . . . . . . . . . . . .
– quick stop 180. . . . . . . . . . . . . . . . . . . . . . . . . .
– shutdown 179. . . . . . . . . . . . . . . . . . . . . . . . . .
Conjuntos de parámetros
– Cargar los valores por defecto 78. . . . . . . . . . .
– Cargar y guardar 76. . . . . . . . . . . . . . . . . . . . . .
– Guardar el conjunto de parámetros 78. . . . . . .
Constante de tiempo de filtro velocidad
sincrónica 132. . . . . . . . . . . . . . . . . . . . . . . . . .
Constante temporal del regulador
de corriente 106. . . . . . . . . . . . . . . . . . . . . . . .
Constante temporal del regulador
de posición 113. . . . . . . . . . . . . . . . . . . . . . . . .
control_effort 117. . . . . . . . . . . . . . . . . . . . . . . . .
controlword 164. . . . . . . . . . . . . . . . . . . . . . . . . .
– Asignación de bits 160, 163, 165. . . . . . . . . .
– Descripción del objeto 164. . . . . . . . . . . . . . . .
– Órdenes 165. . . . . . . . . . . . . . . . . . . . . . . . . . .
Controlword para datos de interpolación 204. . .
Corriente de pico
– Controlador del motor 98. . . . . . . . . . . . . . . . .
– Motor 101. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Corriente máxima 98. . . . . . . . . . . . . . . . . . . . . . .
Corriente máxima del motor 101. . . . . . . . . . . . .
Corriente nominal del dispositivo 97. . . . . . . . . .
Corriente nominal del motor 100. . . . . . . . . . . . .
current_actual_value 225. . . . . . . . . . . . . . . . . . .
current_limitation 121. . . . . . . . . . . . . . . . . . . . .
cycletime_current_controller 152. . . . . . . . . . . . .
cycletime_position_controller 152. . . . . . . . . . . .
cycletime_tracectory_generator 153. . . . . . . . . .
cycletime_velocity_controller 152. . . . . . . . . . . .
DDatos de interpolación 203. . . . . . . . . . . . . . . . . .
dc_link_circuit_voltage 225. . . . . . . . . . . . . . . . .
Desactivar la supervisión de subtensión 97. . . . .
Desplazamiento a una posición nueva 200. . . . .
Detector de final de carrera 141. . . . . . . . . . . . . .
– Polaridad 141. . . . . . . . . . . . . . . . . . . . . . . . . .
– Rampa de parada de emergencia 143. . . . . . . .
CMMP‐AS‐...‐M3/-M0
296 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
Device Control 158. . . . . . . . . . . . . . . . . . . . . . . .
dig_out_state_mapp_dout_1 137. . . . . . . . . . . .
dig_out_state_mapp_dout_2 138. . . . . . . . . . . .
dig_out_state_mapp_dout_3 138. . . . . . . . . . . .
dig_out_state_mapp_ea88_0_high 140. . . . . . .
dig_out_state_mapp_ea88_0_low 139. . . . . . . .
digital_inputs 135. . . . . . . . . . . . . . . . . . . . . . . . .
digital_outputs 136. . . . . . . . . . . . . . . . . . . . . . . .
digital_outputs_data 136. . . . . . . . . . . . . . . . . . .
digital_outputs_mask 136. . . . . . . . . . . . . . . . . .
digital_outputs_state_mapping 137. . . . . . . . . .
disable_operation_option_code 180. . . . . . . . . .
divisor
– acceleration_factor 89. . . . . . . . . . . . . . . . . . .
– position_factor 84. . . . . . . . . . . . . . . . . . . . . . .
– velocity_encoder_factor 86. . . . . . . . . . . . . . . .
drive_data 93, 102, 118, 141, 147. . . . . . . . . . .
EEMERGENCY-Message 37. . . . . . . . . . . . . . . . . . .
Emulación de encoder incremental
– Offset 129. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
– Resolución 129. . . . . . . . . . . . . . . . . . . . . . . . .
enable_dc_link_undervoltage_error 97. . . . . . . .
enable_enhanced_modulation 94. . . . . . . . . . . .
enable_logic 93. . . . . . . . . . . . . . . . . . . . . . . . . . .
encoder_emulation_data 129. . . . . . . . . . . . . . .
encoder_emulation_offset 129. . . . . . . . . . . . . .
encoder_emulation_resolution 129. . . . . . . . . . .
encoder_offset_angle 104. . . . . . . . . . . . . . . . . .
encoder_x10_counter 128. . . . . . . . . . . . . . . . . .
encoder_x10_data_field 127. . . . . . . . . . . . . . . .
encoder_x10_divisor 128. . . . . . . . . . . . . . . . . . .
encoder_x10_numerator 127. . . . . . . . . . . . . . . .
encoder_x10_resolution 127. . . . . . . . . . . . . . . .
encoder_x2a_data_field 125. . . . . . . . . . . . . . . .
encoder_x2a_divisor 125. . . . . . . . . . . . . . . . . . .
encoder_x2a_numerator 125. . . . . . . . . . . . . . . .
encoder_x2a_resolution 125. . . . . . . . . . . . . . . .
encoder_x2b_counter 126. . . . . . . . . . . . . . . . . .
encoder_x2b_data_field 126. . . . . . . . . . . . . . . .
encoder_x2b_divisor 126. . . . . . . . . . . . . . . . . . .
encoder_x2b_numerator 126. . . . . . . . . . . . . . . .
encoder_x2b_resolution 126. . . . . . . . . . . . . . . .
end_velocity 197. . . . . . . . . . . . . . . . . . . . . . . . . .
Entrada SAMPLE como interruptor
de referencia 143. . . . . . . . . . . . . . . . . . . . . . . .
Entrada START como interruptor
de referencia 143. . . . . . . . . . . . . . . . . . . . . . . .
Entradas analógicas
– Tensión de entrada canal 0 133. . . . . . . . . . . . .
– Tensión de entrada canal 1 133. . . . . . . . . . . . .
– Tensión de entrada canal 2 134. . . . . . . . . . . . .
– Tensión offset canal 0 134. . . . . . . . . . . . . . . . .
– Tensión offset canal 1 134. . . . . . . . . . . . . . . . .
– Tensión offset canal 2 135. . . . . . . . . . . . . . . . .
– Tensiones de entrada 133. . . . . . . . . . . . . . . . .
– Tensiones offset 134. . . . . . . . . . . . . . . . . . . . .
Entradas digitales 135. . . . . . . . . . . . . . . . . . . . .
Error de regulación 37. . . . . . . . . . . . . . . . . . . . . .
Error de seguimiento 109. . . . . . . . . . . . . . . . . . .
– Rebasamiento del valor límite 118. . . . . . . . . .
– Tiempo de Timeout 116. . . . . . . . . . . . . . . . . . .
– Ventana de error 116. . . . . . . . . . . . . . . . . . . . .
error_management 155. . . . . . . . . . . . . . . . . . . .
error_register 38. . . . . . . . . . . . . . . . . . . . . . . . . .
Especificaciones técnicas de la interfaz
CANopen 227. . . . . . . . . . . . . . . . . . . . . . . . . . .
Estado
– Not Ready to Switch On 162. . . . . . . . . . . . . . .
– Ready to Switch On 162. . . . . . . . . . . . . . . . . .
– Switch On Disabled 162. . . . . . . . . . . . . . . . . .
– Switched On 162. . . . . . . . . . . . . . . . . . . . . . . .
Estado de parametrización 153. . . . . . . . . . . . . .
Excedido el valor límite de error de seguimiento .
118
FFactor Group 82. . . . . . . . . . . . . . . . . . . . . . . . . . .
– acceleration_factor 88. . . . . . . . . . . . . . . . . . .
– polarity 91. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
– position_factor 83. . . . . . . . . . . . . . . . . . . . . . .
– velocity_encoder_factor 86. . . . . . . . . . . . . . . .
Factores de conversión 82. . . . . . . . . . . . . . . . . .
– Elección de signo 91. . . . . . . . . . . . . . . . . . . . .
– Factor de posición 84. . . . . . . . . . . . . . . . . . . .
CMMP‐AS‐...‐M3/-M0
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 297
Factores de escala 82. . . . . . . . . . . . . . . . . . . . . .
– Elección de signo 91. . . . . . . . . . . . . . . . . . . . .
– Factor de posición 84. . . . . . . . . . . . . . . . . . . .
fault_reaction_option_code 181. . . . . . . . . . . . .
firmware_custom_version 151. . . . . . . . . . . . . . .
firmware_main_version 150. . . . . . . . . . . . . . . . .
first_mapped_object 31. . . . . . . . . . . . . . . . . . . .
Following_Error 109. . . . . . . . . . . . . . . . . . . . . . .
following_error_actual_value 116. . . . . . . . . . . .
following_error_time_out 116. . . . . . . . . . . . . . .
following_error_window 116. . . . . . . . . . . . . . . .
fourth_mapped_object 32. . . . . . . . . . . . . . . . . .
Frecuencia PWM 93. . . . . . . . . . . . . . . . . . . . . . . .
Funcionamiento en modo de par con limitación de
velocidad 122. . . . . . . . . . . . . . . . . . . . . . . . . .
Funcionamiento en modo de velocidad con
limitación de par 121. . . . . . . . . . . . . . . . . . . . .
Ggenerador de curvas de desplazamiento 195. . . .
Gestión de errores 155. . . . . . . . . . . . . . . . . . . . .
Grupo al que se destina 7. . . . . . . . . . . . . . . . . . .
Guardar el conjunto de parámetros 79. . . . . . . . .
Hhome_offset 186. . . . . . . . . . . . . . . . . . . . . . . . . .
Homing Mode 184. . . . . . . . . . . . . . . . . . . . . . . . .
– home_offset 186. . . . . . . . . . . . . . . . . . . . . . . .
– homing_acceleration 188. . . . . . . . . . . . . . . . .
– homing_method 186. . . . . . . . . . . . . . . . . . . . .
– homing_speeds 187. . . . . . . . . . . . . . . . . . . . .
homing_acceleration 188. . . . . . . . . . . . . . . . . . .
homing_method 186. . . . . . . . . . . . . . . . . . . . . . .
homing_speeds 187. . . . . . . . . . . . . . . . . . . . . . .
homing_switch_polarity 142. . . . . . . . . . . . . . . .
homing_switch_selector 143. . . . . . . . . . . . . . . .
homing_timeout 188. . . . . . . . . . . . . . . . . . . . . . .
I
Identificación del equipo 148. . . . . . . . . . . . . . . .
Identificador para PDO 30. . . . . . . . . . . . . . . . . . .
identity_object 148. . . . . . . . . . . . . . . . . . . . . . . .
iit_error_enable 103. . . . . . . . . . . . . . . . . . . . . . .
iit_ratio_motor 102. . . . . . . . . . . . . . . . . . . . . . . .
iit_time_motor 102. . . . . . . . . . . . . . . . . . . . . . . .
inhibit_time 30. . . . . . . . . . . . . . . . . . . . . . . . . . .
Iniciar posicionamiento 200. . . . . . . . . . . . . . . . .
Interpolación del valor de posición 204. . . . . . . .
Interpolación del valor de situación 204. . . . . . . .
interpolation_data_configuration 206. . . . . . . . .
interpolation_data_record 203. . . . . . . . . . . . . . .
interpolation_submode_select 203. . . . . . . . . . .
interpolation_sync_definition 205. . . . . . . . . . . .
interpolation_time_period 204. . . . . . . . . . . . . . .
Interruptor de referencia 141, 143. . . . . . . . . . .
– Polaridad 142. . . . . . . . . . . . . . . . . . . . . . . . . .
ip_data_controlword 204. . . . . . . . . . . . . . . . . . .
ip_data_position 204. . . . . . . . . . . . . . . . . . . . . .
ip_sync_every_n_event 206. . . . . . . . . . . . . . . . .
ip_time_index 205. . . . . . . . . . . . . . . . . . . . . . . .
ip_time_units 205. . . . . . . . . . . . . . . . . . . . . . . . .
L
limit_current 121, 122. . . . . . . . . . . . . . . . . . . . .
limit_current_input_channel 121. . . . . . . . . . . . .
limit_speed_input_channel 122. . . . . . . . . . . . . .
limit_switch_deceleration 143. . . . . . . . . . . . . . .
limit_switch_polarity 141. . . . . . . . . . . . . . . . . . .
Limitación de intensidad 121. . . . . . . . . . . . . . . .
Limitación de velocidad 122. . . . . . . . . . . . . . . . .
– Escala 123. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
– Fuente 122. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
– Valor nominal 122. . . . . . . . . . . . . . . . . . . . . . .
Limitación del par 121. . . . . . . . . . . . . . . . . . . . . .
– Escala 122. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
– Fuente 121. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
– Valor nominal 121. . . . . . . . . . . . . . . . . . . . . . .
Lógica de habilitación 93. . . . . . . . . . . . . . . . . . .
Lógica de habilitación del regulador 93. . . . . . . .
MMando del equipo 158. . . . . . . . . . . . . . . . . . . . .
manufacturer_statusword_1 173. . . . . . . . . . . . .
manufacturer_statusword 173. . . . . . . . . . . . . . .
manufacturer_statuswords 172. . . . . . . . . . . . . .
max_buffer_size 206. . . . . . . . . . . . . . . . . . . . . . .

CMMP‐AS‐...‐M3/-M0
298 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
max_current 101. . . . . . . . . . . . . . . . . . . . . . . . . .
max_dc_link_circuit_voltage 96. . . . . . . . . . . . . .
max_motor_speed 217. . . . . . . . . . . . . . . . . . . . .
max_position_range_limit 119. . . . . . . . . . . . . . .
max_power_stage_temperature 95. . . . . . . . . . .
max_torque 223. . . . . . . . . . . . . . . . . . . . . . . . . .
Mensajes de error SDO 24. . . . . . . . . . . . . . . . . .
Método de referencia 187. . . . . . . . . . . . . . . . . . .
Métodos de recorrido de referencia 189. . . . . . .
min_dc_link_circuit_voltage 96. . . . . . . . . . . . . .
min_position_range_limit 119. . . . . . . . . . . . . . .
modes_of_operation 182. . . . . . . . . . . . . . . . . . .
modes_of_operation_display 183. . . . . . . . . . . .
Modo de funcionamiento de regulación de la
velocidad 210. . . . . . . . . . . . . . . . . . . . . . . . . .
Modo de funcionamiento de regulación del par . .
221
Modo de funcionamiento:, 182, 183
– Ajuste de 182. . . . . . . . . . . . . . . . . . . . . . . . . . .
– Lectura de 183. . . . . . . . . . . . . . . . . . . . . . . . . .
– Modificación de 182. . . . . . . . . . . . . . . . . . . . .
– Recorrido de referencia 184. . . . . . . . . . . . . . .
Modulación sinusoidal ampliada 94. . . . . . . . . . .
Momento nominal del motor 224. . . . . . . . . . . . .
motion_profile_type 199. . . . . . . . . . . . . . . . . . .
motor_data 102, 104. . . . . . . . . . . . . . . . . . . . .
motor_rated_current 100. . . . . . . . . . . . . . . . . . .
motor_rated_torque 224. . . . . . . . . . . . . . . . . . .
motor_temperatur_sensor_polarity 104. . . . . . .
Muestra
– Estado 145. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
– Mando 146. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
– Máscara de estado 145. . . . . . . . . . . . . . . . . . .
– Modo 145. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
N
nominal_current 97. . . . . . . . . . . . . . . . . . . . . . . .
nominal_dc_link_circuit_voltage 95. . . . . . . . . . .
Not Ready to Switch On 162. . . . . . . . . . . . . . . . .
Notas sobre la documentación 7. . . . . . . . . . . . .
number_of_mapped_objects 31. . . . . . . . . . . . .
numerator 91. . . . . . . . . . . . . . . . . . . . . . . . . . . .
– acceleration_factor 89. . . . . . . . . . . . . . . . . . .
numerator
– position_factor 84. . . . . . . . . . . . . . . . . . . . . . .
– velocity_encoder_factor 86. . . . . . . . . . . . . . . .
Número de la versión de firmware 150. . . . . . . . .
Número de objetos mapeados 31. . . . . . . . . . . .
Número de pares de polos 101. . . . . . . . . . . . . . .
Número de polos 101. . . . . . . . . . . . . . . . . . . . . .
Número de revisión CANopen 149. . . . . . . . . . . .
Número de versión de la especificación
de cliente Variante 151. . . . . . . . . . . . . . . . . . .
OObjetos
– objeto 1001h 37. . . . . . . . . . . . . . . . . . . . . . . .
– objeto 1003h 38. . . . . . . . . . . . . . . . . . . . . . . .
– Objeto 1003h_01h 39. . . . . . . . . . . . . . . . . . . .
– Objeto 1003h_02h 39. . . . . . . . . . . . . . . . . . . .
– Objeto 1003h_03h 39. . . . . . . . . . . . . . . . . . . .
– Objeto 1003h_04h 39. . . . . . . . . . . . . . . . . . . .
– objeto 1005h 36. . . . . . . . . . . . . . . . . . . . . . . .
– objeto 1010h 78. . . . . . . . . . . . . . . . . . . . . . . .
– Objeto 1010h_01h 79. . . . . . . . . . . . . . . . . . . .
– objeto 1011h 78. . . . . . . . . . . . . . . . . . . . . . . .
– Objeto 1011h_01h 78. . . . . . . . . . . . . . . . . . . .
– objeto 1018h 148. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 1018h_01h 148. . . . . . . . . . . . . . . . . . .
– Objeto 1018h_02h 149. . . . . . . . . . . . . . . . . . .
– Objeto 1018h_03h 149. . . . . . . . . . . . . . . . . . .
– Objeto 1018h_04h 149. . . . . . . . . . . . . . . . . . .
– objeto 1100h 56. . . . . . . . . . . . . . . . . . . . . . . .
– objeto 1402h 35. . . . . . . . . . . . . . . . . . . . . . . .
– objeto 1403h 35. . . . . . . . . . . . . . . . . . . . . . . .
– objeto 1602h 35. . . . . . . . . . . . . . . . . . . . . . . .
– Objeto 1603h 35. . . . . . . . . . . . . . . . . . . . . . . .
– objeto 1800h 30, 32. . . . . . . . . . . . . . . . . . . . .
– Objeto 1800h_01h 30. . . . . . . . . . . . . . . . . . . .
– Objeto 1800h_02h 30. . . . . . . . . . . . . . . . . . . .
– Objeto 1800h_03h 30. . . . . . . . . . . . . . . . . . . .
– objeto 1801h 32. . . . . . . . . . . . . . . . . . . . . . . .
– objeto 1802h 33. . . . . . . . . . . . . . . . . . . . . . . .
– objeto 1803h 33. . . . . . . . . . . . . . . . . . . . . . . .
CMMP‐AS‐...‐M3/-M0
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 299
– Objeto 1A00h 31, 32. . . . . . . . . . . . . . . . . . . . .
– Objeto 1A00h_00h 31. . . . . . . . . . . . . . . . . . . .
– Objeto 1A00h_01h 31. . . . . . . . . . . . . . . . . . . .
– Objeto 1A00h_02h 31. . . . . . . . . . . . . . . . . . . .
– Objeto 1A00h_03h 31. . . . . . . . . . . . . . . . . . . .
– Objeto 1A00h_04h 32. . . . . . . . . . . . . . . . . . . .
– Objeto 1A01h 32. . . . . . . . . . . . . . . . . . . . . . . .
– Objeto 1A02h 33. . . . . . . . . . . . . . . . . . . . . . . .
– Objeto 1A03h 33. . . . . . . . . . . . . . . . . . . . . . . .
– Objeto 1C00h 56. . . . . . . . . . . . . . . . . . . . . . . .
– Objeto 1C00h_00h 56. . . . . . . . . . . . . . . . . . . .
– Objeto 1C00h_01h 56. . . . . . . . . . . . . . . . . . . .
– Objeto 1C00h_02h 57. . . . . . . . . . . . . . . . . . . .
– Objeto 1C00h_03h 57. . . . . . . . . . . . . . . . . . . .
– Objeto 1C00h_04h 57. . . . . . . . . . . . . . . . . . . .
– Objeto 1C10h 57. . . . . . . . . . . . . . . . . . . . . . . .
– Objeto 1C11h 58. . . . . . . . . . . . . . . . . . . . . . . .
– Objeto 1C12h 58. . . . . . . . . . . . . . . . . . . . . . . .
– Objeto 1C12h_00h 59. . . . . . . . . . . . . . . . . . . .
– Objeto 1C12h_01h 59. . . . . . . . . . . . . . . . . . . .
– Objeto 1C12h_02h 59. . . . . . . . . . . . . . . . . . . .
– Objeto 1C12h_03h 59. . . . . . . . . . . . . . . . . . . .
– Objeto 1C12h_04h 60. . . . . . . . . . . . . . . . . . . .
– Objeto 1C13h 60. . . . . . . . . . . . . . . . . . . . . . . .
– Objeto 1C13h_00h 60. . . . . . . . . . . . . . . . . . . .
– Objeto 1C13h_01h 60. . . . . . . . . . . . . . . . . . . .
– Objeto 1C13h_02h 61. . . . . . . . . . . . . . . . . . . .
– Objeto 1C13h_03h 61. . . . . . . . . . . . . . . . . . . .
– Objeto 1C13h_04h 61. . . . . . . . . . . . . . . . . . . .
– Objeto 2000h 172. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 2000h_00h 173. . . . . . . . . . . . . . . . . . .
– Objeto 2000h_01h 173. . . . . . . . . . . . . . . . . . .
– objeto 2014h 33. . . . . . . . . . . . . . . . . . . . . . . .
– objeto 2015h 33. . . . . . . . . . . . . . . . . . . . . . . .
– objeto 2016h 34. . . . . . . . . . . . . . . . . . . . . . . .
– objeto 2017h 34. . . . . . . . . . . . . . . . . . . . . . . .
– Objeto 201Ah 129. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 201Ah_01h 129. . . . . . . . . . . . . . . . . . .
– Objeto 201Ah_02h 129. . . . . . . . . . . . . . . . . . .
– objeto 2021h 130. . . . . . . . . . . . . . . . . . . . . . .
– objeto 2022h 131. . . . . . . . . . . . . . . . . . . . . . .
– objeto 2023h 132. . . . . . . . . . . . . . . . . . . . . . .
– objeto 2024h 125. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 2024h_01h 125. . . . . . . . . . . . . . . . . . .
– Objeto 2024h_02h 125. . . . . . . . . . . . . . . . . . .
– Objeto 2024h_03h 125. . . . . . . . . . . . . . . . . . .
– objeto 2025h 127. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 2025h_01h 127. . . . . . . . . . . . . . . . . . .
– Objeto 2025h_02h 127. . . . . . . . . . . . . . . . . . .
– Objeto 2025h_03h 128. . . . . . . . . . . . . . . . . . .
– Objeto 2025h_04h 128. . . . . . . . . . . . . . . . . . .
– objeto 2026h 126. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 2026h_01h 126. . . . . . . . . . . . . . . . . . .
– Objeto 2026h_02h 126. . . . . . . . . . . . . . . . . . .
– Objeto 2026h_03h 126. . . . . . . . . . . . . . . . . . .
– Objeto 2026h_04h 126. . . . . . . . . . . . . . . . . . .
– objeto 2028h 129. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 202Dh 114. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 202Eh 214. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 202Fh 132. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 202Fh_07h 132. . . . . . . . . . . . . . . . . . .
– objeto 2045h 188. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 204Ah 144. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 204Ah_01h 145. . . . . . . . . . . . . . . . . . .
– Objeto 204Ah_02h 145. . . . . . . . . . . . . . . . . . .
– Objeto 204Ah_03h 145. . . . . . . . . . . . . . . . . . .
– Objeto 204Ah_04h 146. . . . . . . . . . . . . . . . . . .
– Objeto 204Ah_05h 146. . . . . . . . . . . . . . . . . . .
– Objeto 204Ah_06h 146. . . . . . . . . . . . . . . . . . .
– objeto 2090h 219. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 2090h_01h 219. . . . . . . . . . . . . . . . . . .
– Objeto 2090h_02h 219. . . . . . . . . . . . . . . . . . .
– Objeto 2090h_03h 219. . . . . . . . . . . . . . . . . . .
– Objeto 2090h_04h 220. . . . . . . . . . . . . . . . . . .
– Objeto 2090h_05h 220. . . . . . . . . . . . . . . . . . .
– objeto 2100h 155. . . . . . . . . . . . . . . . . . . . . . .
– objeto 2400h 133. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 2400h_01h 133. . . . . . . . . . . . . . . . . . .
– Objeto 2400h_02h 133. . . . . . . . . . . . . . . . . . .
– Objeto 2400h_03h 134. . . . . . . . . . . . . . . . . . .
– objeto 2401h 134. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 2401h_01h 134. . . . . . . . . . . . . . . . . . .
– Objeto 2401h_02h 134. . . . . . . . . . . . . . . . . . .
– Objeto 2401h_03h 135. . . . . . . . . . . . . . . . . . .
– objeto 2415h 121. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 2415h_01h 121. . . . . . . . . . . . . . . . . . .

CMMP‐AS‐...‐M3/-M0
300 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
– Objeto 2415h_02h 121. . . . . . . . . . . . . . . . . . .
– objeto 2416h 122. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 2416h_01h 122. . . . . . . . . . . . . . . . . . .
– Objeto 2416h_02h 122. . . . . . . . . . . . . . . . . . .
– objeto 2420h 137. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 2420h_01h 137. . . . . . . . . . . . . . . . . . .
– Objeto 2420h_02h 138. . . . . . . . . . . . . . . . . . .
– Objeto 2420h_03h 138. . . . . . . . . . . . . . . . . . .
– Objeto 2420h_11h 139. . . . . . . . . . . . . . . . . . .
– Objeto 2420h_12h 140. . . . . . . . . . . . . . . . . . .
– Objeto 2600h 177. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 2600h_01h 177. . . . . . . . . . . . . . . . . . .
– Objeto 2600h_02h 178. . . . . . . . . . . . . . . . . . .
– Objeto 2602h 178. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 2602h_01h 178. . . . . . . . . . . . . . . . . . .
– objeto 6040h 164. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6041h 169. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 604Dh 101. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 605Ah 180. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 605Bh 179. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 605Ch 180. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 605Eh 181. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 6060h 182. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6061h 183. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6062h 114. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6063h 115. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6064h 115. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6065h 116. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6066h 116. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6067h 117. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6068h 118. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6069h 213. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 606Ah 213. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 606Bh 213. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 606Ch 214. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 606Dh 216. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 606Eh 216. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 606Fh 216. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6070h 217. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6071h 223. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6072h 223. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6073h 101. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6074h 224. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6075h 100. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6076h 224. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6077h 224. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6078h 225. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6079h 225. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 607Ah 196. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 607Bh 119. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 607Bh_01h 119. . . . . . . . . . . . . . . . . . .
– Objeto 607Bh_02h 119. . . . . . . . . . . . . . . . . . .
– Objeto 607Ch 186. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 607Eh 91. . . . . . . . . . . . . . . . . . . . . . . .
– objeto 6080h 217. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6081h 196. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6082h 197. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6083h 197. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6084h 197. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6085h 198. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6086h 199. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6087h 226. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6088h 226. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 608Ah 62. . . . . . . . . . . . . . . . . . . . . . . .
– Objeto 608Bh 62. . . . . . . . . . . . . . . . . . . . . . . .
– Objeto 608Ch 62. . . . . . . . . . . . . . . . . . . . . . . .
– Objeto 608Dh 62. . . . . . . . . . . . . . . . . . . . . . . .
– Objeto 608Eh 62. . . . . . . . . . . . . . . . . . . . . . . .
– Objeto 6093h 83. . . . . . . . . . . . . . . . . . . . . . . .
– Objeto 6093h_01h 84. . . . . . . . . . . . . . . . . . . .
– Objeto 6093h_02h 84. . . . . . . . . . . . . . . . . . . .
– objeto 6094h 86. . . . . . . . . . . . . . . . . . . . . . . .
– Objeto 6094h_01h 86. . . . . . . . . . . . . . . . . . . .
– Objeto 6094h_02h 86. . . . . . . . . . . . . . . . . . . .
– objeto 6097h 88. . . . . . . . . . . . . . . . . . . . . . . .
– Objeto 6097h_01h 89. . . . . . . . . . . . . . . . . . . .
– Objeto 6097h_02h 89. . . . . . . . . . . . . . . . . . . .
– objeto 6098h 186. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6099h 187. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 6099h_01h 187. . . . . . . . . . . . . . . . . . .
– Objeto 6099h_02h 188. . . . . . . . . . . . . . . . . . .
– Objeto 609Ah 188. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 60C0h 203. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 60C1h 203. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 60C1h_01h 204. . . . . . . . . . . . . . . . . . .
– Objeto 60C1h_02h 204. . . . . . . . . . . . . . . . . . .
CMMP‐AS‐...‐M3/-M0
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 301
– Objeto 60C2h 204. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 60C2h_01h 205. . . . . . . . . . . . . . . . . . .
– Objeto 60C2h_02h 205. . . . . . . . . . . . . . . . . . .
– Objeto 60C3h 205. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 60C3h_01h 206. . . . . . . . . . . . . . . . . . .
– Objeto 60C3h_02h 206. . . . . . . . . . . . . . . . . . .
– Objeto 60C4h 206. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 60C4h_01h 206. . . . . . . . . . . . . . . . . . .
– Objeto 60C4h_02h 207. . . . . . . . . . . . . . . . . . .
– Objeto 60C4h_03h 207. . . . . . . . . . . . . . . . . . .
– Objeto 60C4h_04h 207. . . . . . . . . . . . . . . . . . .
– Objeto 60C4h_05h 207. . . . . . . . . . . . . . . . . . .
– Objeto 60C4h_06h 208. . . . . . . . . . . . . . . . . . .
– Objeto 60F4h 116. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 60F6h 105. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 60F6h_01h 106. . . . . . . . . . . . . . . . . . .
– Objeto 60F6h_02h 106. . . . . . . . . . . . . . . . . . .
– Objeto 60F9h 107. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 60F9h_01h 108. . . . . . . . . . . . . . . . . . .
– Objeto 60F9h_02h 108. . . . . . . . . . . . . . . . . . .
– Objeto 60F9h_04h 108. . . . . . . . . . . . . . . . . . .
– Objeto 60FAh 117. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 60FBh 112. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 60FBh_01h 113. . . . . . . . . . . . . . . . . . .
– Objeto 60FBh_02h 113. . . . . . . . . . . . . . . . . . .
– Objeto 60FBh_04h 113. . . . . . . . . . . . . . . . . . .
– Objeto 60FBh_05h 113. . . . . . . . . . . . . . . . . . .
– Objeto 60FDh 135. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 60FEh 136. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 60FEh_01h 136. . . . . . . . . . . . . . . . . . .
– Objeto 60FEh_02h 136. . . . . . . . . . . . . . . . . . .
– Objeto 60FFh 218. . . . . . . . . . . . . . . . . . . . . . .
– objeto 6410h 101. . . . . . . . . . . . . . . . . . . . . . .
– Objeto 6410h_03h 102. . . . . . . . . . . . . . . . . . .
– Objeto 6410h_04h 102. . . . . . . . . . . . . . . . . . .
– Objeto 6410h_10h 103. . . . . . . . . . . . . . . . . . .
– Objeto 6410h_11h 104. . . . . . . . . . . . . . . . . . .
– Objeto 6410h_14h 104. . . . . . . . . . . . . . . . . . .
– objeto 6510h 93. . . . . . . . . . . . . . . . . . . . . . . .
– Objeto 6510h_10h 93. . . . . . . . . . . . . . . . . . . .
– Objeto 6510h_11h 141. . . . . . . . . . . . . . . . . . .
– Objeto 6510h_13h 143. . . . . . . . . . . . . . . . . . .
– Objeto 6510h_14h 142. . . . . . . . . . . . . . . . . . .
– Objeto 6510h_15h 143. . . . . . . . . . . . . . . . . . .
– Objeto 6510h_18h 148. . . . . . . . . . . . . . . . . . .
– Objeto 6510h_20h 120. . . . . . . . . . . . . . . . . . .
– Objeto 6510h_22h 118. . . . . . . . . . . . . . . . . . .
– Objeto 6510h_30h 93. . . . . . . . . . . . . . . . . . . .
– Objeto 6510h_31h 94. . . . . . . . . . . . . . . . . . . .
– Objeto 6510h_32h 95. . . . . . . . . . . . . . . . . . . .
– Objeto 6510h_33h 95. . . . . . . . . . . . . . . . . . . .
– Objeto 6510h_34h 95. . . . . . . . . . . . . . . . . . . .
– Objeto 6510h_35h 96. . . . . . . . . . . . . . . . . . . .
– Objeto 6510h_36h 96. . . . . . . . . . . . . . . . . . . .
– Objeto 6510h_37h 97. . . . . . . . . . . . . . . . . . . .
– Objeto 6510h_38h 103. . . . . . . . . . . . . . . . . . .
– Objeto 6510h_3Ah 94. . . . . . . . . . . . . . . . . . . .
– Objeto 6510h_40h 97. . . . . . . . . . . . . . . . . . . .
– Objeto 6510h_41h 98. . . . . . . . . . . . . . . . . . . .
– Objeto 6510h_A9h 150. . . . . . . . . . . . . . . . . . .
– Objeto 6510h_AAh 151. . . . . . . . . . . . . . . . . . .
– Objeto 6510h_B0h 152. . . . . . . . . . . . . . . . . . .
– Objeto 6510h_B1h 152. . . . . . . . . . . . . . . . . . .
– Objeto 6510h_B2h 152. . . . . . . . . . . . . . . . . . .
– Objeto 6510h_B3h 153. . . . . . . . . . . . . . . . . . .
– Objeto 6510h_C0h 153. . . . . . . . . . . . . . . . . . .
Ocupación de conexiones CAN 12. . . . . . . . . . . .
Offset de punto cero 186. . . . . . . . . . . . . . . . . . .
Offset del transmisor de ángulo 104. . . . . . . . . .
PPalabra de estado - específica
de cada productor 172. . . . . . . . . . . . . . . . . . .
Palabra de estado específica
de cada productor 173. . . . . . . . . . . . . . . . . . .
Palabra de estado específica
de cada productor 1 173. . . . . . . . . . . . . . . . . .
Par admisible 223. . . . . . . . . . . . . . . . . . . . . . . . .
Par máximo 223. . . . . . . . . . . . . . . . . . . . . . . . . .
Par nominal (regulación del par) 223. . . . . . . . . .
Par objetivo (regulación del par) 223. . . . . . . . . .
Parámetro de mapeado para PDO 31. . . . . . . . . .
Parámetro de transmisión para PDO 30. . . . . . . .
Parámetros de paso de salida 92. . . . . . . . . . . . .
– Corriente máxima 98. . . . . . . . . . . . . . . . . . . . .
– Corriente nominal del dispositivo 97. . . . . . . . .
CMMP‐AS‐...‐M3/-M0
302 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
– Frecuencia PWM 93. . . . . . . . . . . . . . . . . . . . . .
– Lógica de habilitación 93. . . . . . . . . . . . . . . . . .
– Temperatura máxima 95. . . . . . . . . . . . . . . . . .
– Tensión del circuito intermedio 95. . . . . . . . . .
– Tensión máxima del circuito intermedio 96. . . .
– Tensión mínima del circuito intermedio 96. . . .
– Tensión nominal del dispositivo 95. . . . . . . . . .
Parámetros del motor
– Ángulo offset del resolver 104. . . . . . . . . . . . .
– Corriente nominal 100. . . . . . . . . . . . . . . . . . . .
– Número (de pares) de polos 101. . . . . . . . . . . .
– Tiempo I2t 102. . . . . . . . . . . . . . . . . . . . . . . . . .
Parámetros del regulador de posición 113. . . . . .
PDO 26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
– Cuarto objeto introducido 32. . . . . . . . . . . . . .
– Primer objeto introducido 31. . . . . . . . . . . . . .
– RPDO3
COBID used by PDO 35. . . . . . . . . . . . . . . . . . .
Cuarto objeto introducido 35. . . . . . . . . . . . . .
first mapped object 35. . . . . . . . . . . . . . . . . . .
fourth mapped object 35. . . . . . . . . . . . . . . . . .
Identifier 35. . . . . . . . . . . . . . . . . . . . . . . . . . . .
number of mapped objects 35. . . . . . . . . . . . .
Número de objetos introducidos 35. . . . . . . . .
Primer objeto introducido 35. . . . . . . . . . . . . .
second mapped object 35. . . . . . . . . . . . . . . . .
Segundo objeto introducido 35. . . . . . . . . . . .
Tercer objeto introducido 35. . . . . . . . . . . . . . .
third mapped object 35. . . . . . . . . . . . . . . . . . .
Tipo de transmisión 35. . . . . . . . . . . . . . . . . . .
transmission type 35. . . . . . . . . . . . . . . . . . . . .
– RPDO4
COBID used by PDO 35. . . . . . . . . . . . . . . . . . .
Cuarto objeto introducido 35. . . . . . . . . . . . . .
first mapped object 35. . . . . . . . . . . . . . . . . . .
fourth mapped object 35. . . . . . . . . . . . . . . . . .
Identifier 35. . . . . . . . . . . . . . . . . . . . . . . . . . . .
number of mapped objects 35. . . . . . . . . . . . .
Número de objetos introducidos 35. . . . . . . . .
Primer objeto introducido 35. . . . . . . . . . . . . .
second mapped object 35. . . . . . . . . . . . . . . . .
Segundo objeto introducido 35. . . . . . . . . . . .
Tercer objeto introducido 35. . . . . . . . . . . . . . .
third mapped object 35. . . . . . . . . . . . . . . . . . .
Tipo de transmisión 35. . . . . . . . . . . . . . . . . . .
transmission type 35. . . . . . . . . . . . . . . . . . . . .
– Segundo objeto introducido 31. . . . . . . . . . . .
– Tercer objeto introducido 31. . . . . . . . . . . . . . .
– TPDO1
COBID used by PDO 32. . . . . . . . . . . . . . . . . . .
Cuarto objeto introducido 32. . . . . . . . . . . . . .
first mapped object 32. . . . . . . . . . . . . . . . . . .
fourth mapped object 32. . . . . . . . . . . . . . . . . .
Identifier 32. . . . . . . . . . . . . . . . . . . . . . . . . . . .
inhibit time 32. . . . . . . . . . . . . . . . . . . . . . . . . .
Máscara de transmisión 33. . . . . . . . . . . . . . . .
number of mapped objects 32. . . . . . . . . . . . .
Número de objetos introducidos 32. . . . . . . . .
Primer objeto introducido 32. . . . . . . . . . . . . .
second mapped object 32. . . . . . . . . . . . . . . . .
Segundo objeto introducido 32. . . . . . . . . . . .
Tercer objeto introducido 32. . . . . . . . . . . . . . .
third mapped object 32. . . . . . . . . . . . . . . . . . .
Tiempo de bloqueo 32. . . . . . . . . . . . . . . . . . . .
Tipo de transmisión 32. . . . . . . . . . . . . . . . . . .
transmission type 32. . . . . . . . . . . . . . . . . . . . .
– TPDO2
COBID used by PDO 32. . . . . . . . . . . . . . . . . . .
Cuarto objeto introducido 32. . . . . . . . . . . . . .
first mapped object 32. . . . . . . . . . . . . . . . . . .
fourth mapped object 32. . . . . . . . . . . . . . . . . .
Identifier 32. . . . . . . . . . . . . . . . . . . . . . . . . . . .
inhibit time 32. . . . . . . . . . . . . . . . . . . . . . . . . .
Máscara de transmisión 33. . . . . . . . . . . . . . . .
number of mapped objects 32. . . . . . . . . . . . .
Número de objetos introducidos 32. . . . . . . . .
Primer objeto introducido 32. . . . . . . . . . . . . .
second mapped object 32. . . . . . . . . . . . . . . . .
Segundo objeto introducido 32. . . . . . . . . . . .
Tercer objeto introducido 32. . . . . . . . . . . . . . .
third mapped object 32. . . . . . . . . . . . . . . . . . .
Tiempo de bloqueo 32. . . . . . . . . . . . . . . . . . . .
Tipo de transmisión 32. . . . . . . . . . . . . . . . . . .
transmission type 32. . . . . . . . . . . . . . . . . . . . .
– TPDO3

CMMP‐AS‐...‐M3/-M0
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 303
COBID used by PDO 33. . . . . . . . . . . . . . . . . . .
Cuarto objeto introducido 33. . . . . . . . . . . . . .
first mapped object 33. . . . . . . . . . . . . . . . . . .
fourth mapped object 33. . . . . . . . . . . . . . . . . .
Identifier 33. . . . . . . . . . . . . . . . . . . . . . . . . . . .
inhibit time 33. . . . . . . . . . . . . . . . . . . . . . . . . .
Máscara de transmisión 34. . . . . . . . . . . . . . . .
number of mapped objects 33. . . . . . . . . . . . .
Número de objetos introducidos 33. . . . . . . . .
Primer objeto introducido 33. . . . . . . . . . . . . .
second mapped object 33. . . . . . . . . . . . . . . . .
Segundo objeto introducido 33. . . . . . . . . . . .
Tercer objeto introducido 33. . . . . . . . . . . . . . .
third mapped object 33. . . . . . . . . . . . . . . . . . .
Tiempo de bloqueo 33. . . . . . . . . . . . . . . . . . . .
Tipo de transmisión 33. . . . . . . . . . . . . . . . . . .
transmission type 33. . . . . . . . . . . . . . . . . . . . .
– TPDO4
COBID used by PDO 33. . . . . . . . . . . . . . . . . . .
Cuarto objeto introducido 33. . . . . . . . . . . . . .
first mapped object 33. . . . . . . . . . . . . . . . . . .
fourth mapped object 33. . . . . . . . . . . . . . . . . .
Identifier 33. . . . . . . . . . . . . . . . . . . . . . . . . . . .
inhibit time 33. . . . . . . . . . . . . . . . . . . . . . . . . .
Máscara de transmisión 34. . . . . . . . . . . . . . . .
number of mapped objects 33. . . . . . . . . . . . .
Número de objetos introducidos 33. . . . . . . . .
Primer objeto introducido 33. . . . . . . . . . . . . .
second mapped object 33. . . . . . . . . . . . . . . . .
Segundo objeto introducido 33. . . . . . . . . . . .
Tercer objeto introducido 33. . . . . . . . . . . . . . .
third mapped object 33. . . . . . . . . . . . . . . . . . .
Tiempo de bloqueo 33. . . . . . . . . . . . . . . . . . . .
Tipo de transmisión 33. . . . . . . . . . . . . . . . . . .
transmission type 33. . . . . . . . . . . . . . . . . . . . .
PDO-Message 26. . . . . . . . . . . . . . . . . . . . . . . . . .
peak_current 98. . . . . . . . . . . . . . . . . . . . . . . . . .
Perfil de posicionamiento
– Lineal 199. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
– Seno2 199. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
– Sin sacudidas 199. . . . . . . . . . . . . . . . . . . . . . .
phase_order 103. . . . . . . . . . . . . . . . . . . . . . . . . .
Polaridad sensor de temperatura de motor 104.
pole_number 101. . . . . . . . . . . . . . . . . . . . . . . . .
posición de destino 196. . . . . . . . . . . . . . . . . . . .
Posicionar 200. . . . . . . . . . . . . . . . . . . . . . . . . . . .
– Aceleración de parada rápida 198. . . . . . . . . .
– Deceleración 197. . . . . . . . . . . . . . . . . . . . . . . .
– Handshake 200. . . . . . . . . . . . . . . . . . . . . . . . .
– posición de destino 196. . . . . . . . . . . . . . . . . .
– Velocidad al 196. . . . . . . . . . . . . . . . . . . . . . . .
position_actual_value 115. . . . . . . . . . . . . . . . . .
position_actual_value_s 115. . . . . . . . . . . . . . . .
position_control_gain 113. . . . . . . . . . . . . . . . . .
position_control_parameter_set 113. . . . . . . . . .
position_control_time 113. . . . . . . . . . . . . . . . . .
position_control_v_max 113. . . . . . . . . . . . . . . .
position_demand_sync_value 114. . . . . . . . . . . .
position_demand_value 114. . . . . . . . . . . . . . . .
position_encoder_selection 130. . . . . . . . . . . . .
position_error_switch_off_limit 118. . . . . . . . . .
position_error_tolerance_window 113. . . . . . . .
position_factor 83. . . . . . . . . . . . . . . . . . . . . . . . .
position_range_limit 119. . . . . . . . . . . . . . . . . . .
position_range_limit_enable 120. . . . . . . . . . . . .
position_reached 110. . . . . . . . . . . . . . . . . . . . . .
position_window 117. . . . . . . . . . . . . . . . . . . . . .
position_window_time 118. . . . . . . . . . . . . . . . .
position-control-function 109. . . . . . . . . . . . . . . .
power_stage_temperature 94. . . . . . . . . . . . . . .
pre_defined_error_field 38. . . . . . . . . . . . . . . . . .
product_code 149. . . . . . . . . . . . . . . . . . . . . . . . .
Profile Position Mode
– end_velocity 197. . . . . . . . . . . . . . . . . . . . . . . .
– motion_profile_type 199. . . . . . . . . . . . . . . . . .
– profile_acceleration 197. . . . . . . . . . . . . . . . . .
– profile_deceleration 197. . . . . . . . . . . . . . . . . .
– profile_velocity 196. . . . . . . . . . . . . . . . . . . . . .
– quick_stop_deceleration 198. . . . . . . . . . . . . .
– target_position 196. . . . . . . . . . . . . . . . . . . . . .
Profile Torque Mode 221. . . . . . . . . . . . . . . . . . . .
– current_actual_value 225. . . . . . . . . . . . . . . . .
– dc_link_circuit_voltage 225. . . . . . . . . . . . . . .
– max_torque 223. . . . . . . . . . . . . . . . . . . . . . . .
– motor_rated_torque 224. . . . . . . . . . . . . . . . . .
– target_torque 223. . . . . . . . . . . . . . . . . . . . . . .

CMMP‐AS‐...‐M3/-M0
304 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
– torque_actual_value 224. . . . . . . . . . . . . . . . .
– torque_demand_value 224. . . . . . . . . . . . . . . .
– torque_profile_type 226. . . . . . . . . . . . . . . . . .
– torque_slope 226. . . . . . . . . . . . . . . . . . . . . . .
Profile Velocity Mode 210. . . . . . . . . . . . . . . . . . .
– max_motor_speed 217. . . . . . . . . . . . . . . . . . .
– sensor_selection_code 213. . . . . . . . . . . . . . .
– target_velocity 218. . . . . . . . . . . . . . . . . . . . . .
– velocity_actual_value 214. . . . . . . . . . . . . . . . .
– velocity_demand_value 213. . . . . . . . . . . . . . .
– velocity_sensor 213. . . . . . . . . . . . . . . . . . . . . .
– velocity_threshold 216. . . . . . . . . . . . . . . . . . .
– velocity_threshold_time 217. . . . . . . . . . . . . .
– velocity_window 216. . . . . . . . . . . . . . . . . . . . .
– velocity_window_time 216. . . . . . . . . . . . . . . .
profile_acceleration 197. . . . . . . . . . . . . . . . . . . .
profile_deceleration 197. . . . . . . . . . . . . . . . . . . .
profile_velocity 196. . . . . . . . . . . . . . . . . . . . . . .
pwm_frequency 93. . . . . . . . . . . . . . . . . . . . . . . .
Qquick_stop_deceleration 198. . . . . . . . . . . . . . . .
quick_stop_option_code 180. . . . . . . . . . . . . . . .
RRPDO 3 35. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
RPDO4 35. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ready to Switch On 162. . . . . . . . . . . . . . . . . . . .
Receive_PDO_3 35. . . . . . . . . . . . . . . . . . . . . . . .
Receive_PDO_4 35. . . . . . . . . . . . . . . . . . . . . . . .
Recorrido de referencia 184. . . . . . . . . . . . . . . . .
– Control del 194. . . . . . . . . . . . . . . . . . . . . . . . .
– Timeout 188. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Recorridos de referencia
– Métodos 187. . . . . . . . . . . . . . . . . . . . . . . . . . .
– Offset de punto cero 186. . . . . . . . . . . . . . . . . .
– Velocidad de búsqueda 187. . . . . . . . . . . . . . .
– Velocidad lenta 188. . . . . . . . . . . . . . . . . . . . . .
– Velocidades 187. . . . . . . . . . . . . . . . . . . . . . . .
Regulación de la velocidad 210. . . . . . . . . . . . . .
– Tiempo de la ventana de destino 216. . . . . . . .
– Tiempo de umbral de parada 217. . . . . . . . . . .
– Umbral de parada 216. . . . . . . . . . . . . . . . . . . .
– Velocidad de destino 218. . . . . . . . . . . . . . . . .
– Velocidad máxima del motor 217. . . . . . . . . . .
– Velocidad nominal 218. . . . . . . . . . . . . . . . . . .
– Ventana de destino 216. . . . . . . . . . . . . . . . . . .
Regulación del par 221. . . . . . . . . . . . . . . . . . . . .
– Par máximo 223. . . . . . . . . . . . . . . . . . . . . . . . .
– Par nominal 223, 224. . . . . . . . . . . . . . . . . . . .
– Par objetivo 223. . . . . . . . . . . . . . . . . . . . . . . . .
– Perfil de valor nominal 226. . . . . . . . . . . . . . . .
– Valor nominal de corriente 224. . . . . . . . . . . . .
– Valor real de par 224. . . . . . . . . . . . . . . . . . . . .
Regulador de corriente
– Amplificación 106. . . . . . . . . . . . . . . . . . . . . . .
– Constante de tiempo 106. . . . . . . . . . . . . . . . .
– Parámetros 106. . . . . . . . . . . . . . . . . . . . . . . . .
Regulador de posición 109. . . . . . . . . . . . . . . . . .
– Amplificación 113. . . . . . . . . . . . . . . . . . . . . . .
– Constante de tiempo 113. . . . . . . . . . . . . . . . .
– Parámetros 113. . . . . . . . . . . . . . . . . . . . . . . . .
– Salida del 117. . . . . . . . . . . . . . . . . . . . . . . . . .
– Zona muerta 113. . . . . . . . . . . . . . . . . . . . . . . .
Regulador de velocidad
– Amplificación 108. . . . . . . . . . . . . . . . . . . . . . .
– Constante de tiempo 108. . . . . . . . . . . . . . . . .
– Constante de tiempo de filtro 108. . . . . . . . . . .
– Parámetros 108. . . . . . . . . . . . . . . . . . . . . . . . .
resolver_offset_angle 104. . . . . . . . . . . . . . . . . .
restore_all_default_parameters 78. . . . . . . . . . .
restore_parameters 78. . . . . . . . . . . . . . . . . . . . .
revision_number 149. . . . . . . . . . . . . . . . . . . . . .
SSalida del regulador de posición 117. . . . . . . . . .
Salidas digitales 136. . . . . . . . . . . . . . . . . . . . . . .
– estados 136. . . . . . . . . . . . . . . . . . . . . . . . . . . .
– Mapeado de CAMCEA 139, 140. . . . . . . . . . .
– Mapping 137. . . . . . . . . . . . . . . . . . . . . . . . . . .
– Mapping de DOUT1 137. . . . . . . . . . . . . . . . . . .
– Mapping de DOUT2 138. . . . . . . . . . . . . . . . . . .
– Mapping de DOUT3 138. . . . . . . . . . . . . . . . . . .
– máscara 136. . . . . . . . . . . . . . . . . . . . . . . . . . .
sample_control 146. . . . . . . . . . . . . . . . . . . . . . .
sample_data 144. . . . . . . . . . . . . . . . . . . . . . . . .

CMMP‐AS‐...‐M3/-M0
Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español 305
sample_mode 145. . . . . . . . . . . . . . . . . . . . . . . .
sample_position_falling_edge 146. . . . . . . . . . .
sample_position_rising_edge 146. . . . . . . . . . . .
sample_status 145. . . . . . . . . . . . . . . . . . . . . . . .
sample_status_mask 145. . . . . . . . . . . . . . . . . . .
SamplingPosition
– Flanco ascendente 146. . . . . . . . . . . . . . . . . . .
– Flanco descendente 146. . . . . . . . . . . . . . . . . .
save_all_parameters 79. . . . . . . . . . . . . . . . . . . .
SDO 22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SDO-Message 21. . . . . . . . . . . . . . . . . . . . . . . . . .
second_mapped_object 31. . . . . . . . . . . . . . . . .
Selección de la posición de valor real 130. . . . . .
Selección del origen de la sincronización 131. . .
sensor_selection_code 213. . . . . . . . . . . . . . . . .
serial_number 149. . . . . . . . . . . . . . . . . . . . . . . .
shutdown_option_code 179. . . . . . . . . . . . . . . . .
size_of_data_record 207. . . . . . . . . . . . . . . . . . .
speed_during_search_for_switch 187. . . . . . . . .
speed_during_search_for_zero 188. . . . . . . . . . .
speed_limitation 122. . . . . . . . . . . . . . . . . . . . . .
standard_error_field_0 39. . . . . . . . . . . . . . . . . .
standard_error_field_1 39. . . . . . . . . . . . . . . . . .
standard_error_field_2 39. . . . . . . . . . . . . . . . . .
standard_error_field_3 39. . . . . . . . . . . . . . . . . .
State
– Not Ready to Switch On 162. . . . . . . . . . . . . . .
– Ready to Switch On 162. . . . . . . . . . . . . . . . . .
– Switch On Disabled 162. . . . . . . . . . . . . . . . . .
– Switched On 162. . . . . . . . . . . . . . . . . . . . . . . .
statusword
– Asignación de bits 169. . . . . . . . . . . . . . . . . . .
– Descripción del objeto 169. . . . . . . . . . . . . . . .
store_parameters 78. . . . . . . . . . . . . . . . . . . . . .
Supervisión del circuito intermedio 96. . . . . . . . .
Switch On Disabled 162. . . . . . . . . . . . . . . . . . . .
SYNC 36. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
SYNC Message 36. . . . . . . . . . . . . . . . . . . . . . . . .
synchronisation_encoder_selection 131. . . . . . .
synchronisation_filter_time 132. . . . . . . . . . . . . .
synchronisation_main 132. . . . . . . . . . . . . . . . . .
synchronisation_selector_data 132. . . . . . . . . . .
syncronize_on_group 206. . . . . . . . . . . . . . . . . . .
TTPDO 1 32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
TPDO 2 32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
TPDO 3 33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
TPDO 4 33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
target_position 196. . . . . . . . . . . . . . . . . . . . . . .
target_torque 223. . . . . . . . . . . . . . . . . . . . . . . . .
target_velocity 218. . . . . . . . . . . . . . . . . . . . . . . .
Temperatura máxima del paso de salida 95. . . . .
Tensión actual del circuito intermedio 95. . . . . . .
Tensión del circuito intermedio
– actual 95. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
– máximo 96. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
– mínima 96. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Tensión nominal del dispositivo 95. . . . . . . . . . . .
third_mapped_object 31. . . . . . . . . . . . . . . . . . .
Tiempo de ciclo de PDO 30. . . . . . . . . . . . . . . . . .
Tiempo de la ventana de destino 118. . . . . . . . . .
Tiempo de la ventana de destino con
regulación de la velocidad 216. . . . . . . . . . . . .
Tiempo de retardo de frenado 148. . . . . . . . . . . .
Tiempo de Timeout de error de seguimiento 116.
Tiempo de umbral de parada con
regulación de la velocidad 217. . . . . . . . . . . . .
Tiempo I2t 102. . . . . . . . . . . . . . . . . . . . . . . . . . .
Tiempos de ciclo
– Control del posicionamiento 153. . . . . . . . . . .
– Regulador de corriente 152. . . . . . . . . . . . . . . .
– Regulador de posición 152. . . . . . . . . . . . . . . .
– Regulador de velocidad 152. . . . . . . . . . . . . . .
Tipo de interpolación 203. . . . . . . . . . . . . . . . . . .
Tipo de transmisión 30. . . . . . . . . . . . . . . . . . . . .
torque_actual_value 224. . . . . . . . . . . . . . . . . . .
torque_control_gain 106. . . . . . . . . . . . . . . . . . .
torque_control_parameters 106. . . . . . . . . . . . .
torque_control_time 106. . . . . . . . . . . . . . . . . . .
torque_demand_value 224. . . . . . . . . . . . . . . . . .
torque_profile_type 226. . . . . . . . . . . . . . . . . . . .
torque_slope 226. . . . . . . . . . . . . . . . . . . . . . . . .
tpdo_1_transmit_mask 33. . . . . . . . . . . . . . . . . .
tpdo_2_transmit_mask 33. . . . . . . . . . . . . . . . . .
tpdo_3_transmit_mask 34. . . . . . . . . . . . . . . . . .
tpdo_4_transmit_mask 34. . . . . . . . . . . . . . . . . .

CMMP‐AS‐...‐M3/-M0
306 Festo – GDCP-CMMP-M3/-M0-C-CO-ES – 1510b – Español
transfer_PDO_1 32. . . . . . . . . . . . . . . . . . . . . . . .
transfer_PDO_2 32. . . . . . . . . . . . . . . . . . . . . . . .
transfer_PDO_3 33. . . . . . . . . . . . . . . . . . . . . . . .
transfer_PDO_4 33. . . . . . . . . . . . . . . . . . . . . . . .
transmission_type 30. . . . . . . . . . . . . . . . . . . . . .
transmit_pdo_mapping 31. . . . . . . . . . . . . . . . . .
transmit_pdo_parameter 30. . . . . . . . . . . . . . . . .
UUmbral de parada con regulación
de la velocidad 216. . . . . . . . . . . . . . . . . . . . . .
VValor actual
– Par (torque_actual_value) 224. . . . . . . . . . . . .
– Posición en incrementos
(position_actual_value_s) 115. . . . . . . . . . . . .
– Posición en position_units
(position_actual_value) 115. . . . . . . . . . . . . . .
Valor actual del error de seguimiento 116. . . . . .
Valor límite error de seguimiento 118. . . . . . . . .
Valor nominal
– Corriente 224. . . . . . . . . . . . . . . . . . . . . . . . . . .
– Par 223. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
– Velocidad sincrónica (velocity units) 214. . . . .
Valor nominal de corriente 224. . . . . . . . . . . . . . .
Valor real de par 224. . . . . . . . . . . . . . . . . . . . . . .
Valor real de posición (incrementos) 115. . . . . . .
Valor real de posición (position units) 115. . . . . .
Valor real de velocidad 214. . . . . . . . . . . . . . . . . .
Velocidad
– al posicionar 196. . . . . . . . . . . . . . . . . . . . . . . .
– durante el recorrido de referencia 187. . . . . . .
Velocidad de corrección 113. . . . . . . . . . . . . . . . .
Velocidad de destino para la regulación de la
velocidad 218. . . . . . . . . . . . . . . . . . . . . . . . . .
Velocidad de posicionamiento 196. . . . . . . . . . . .
Velocidad máxima del motor 217. . . . . . . . . . . . .
Velocidad nominal para la regulación de la
velocidad 218. . . . . . . . . . . . . . . . . . . . . . . . . .
Velocidad sincrónica (velocity units) 214. . . . . . .
velocity_acceleration_neg 220. . . . . . . . . . . . . . .
velocity_acceleration_pos 219. . . . . . . . . . . . . . .
velocity_actual_value 214. . . . . . . . . . . . . . . . . .
velocity_control_filter_time 108. . . . . . . . . . . . . .
velocity_control_gain 108. . . . . . . . . . . . . . . . . . .
velocity_control_parameter_set 108. . . . . . . . . .
velocity_control_time 108. . . . . . . . . . . . . . . . . .
velocity_deceleration_neg 220. . . . . . . . . . . . . . .
velocity_deceleration_pos 219. . . . . . . . . . . . . . .
velocity_demand_sync_value 214. . . . . . . . . . . .
velocity_demand_value 213. . . . . . . . . . . . . . . . .
velocity_encoder_factor 86. . . . . . . . . . . . . . . . .
velocity_ramps 219. . . . . . . . . . . . . . . . . . . . . . . .
velocity_ramps_enable 219. . . . . . . . . . . . . . . . .
velocity_sensor_actual_value 213. . . . . . . . . . . .
velocity_threshold 216. . . . . . . . . . . . . . . . . . . . .
velocity_threshold_time 217. . . . . . . . . . . . . . . .
velocity_window 216. . . . . . . . . . . . . . . . . . . . . .
velocity_window_time 216. . . . . . . . . . . . . . . . . .
vendor_id 148. . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ventana de destino
– Tiempo 118. . . . . . . . . . . . . . . . . . . . . . . . . . . .
– Ventana de posición 117. . . . . . . . . . . . . . . . . .
Ventana de destino con regulación de la
velocidad 216. . . . . . . . . . . . . . . . . . . . . . . . . .
Ventana de error de seguimiento 116. . . . . . . . . .
Ventana de posición de destino 117. . . . . . . . . . .
Versión 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
XX10
– Accionamiento 127. . . . . . . . . . . . . . . . . . . . . .
– Contador 128. . . . . . . . . . . . . . . . . . . . . . . . . . .
– Resolución 127. . . . . . . . . . . . . . . . . . . . . . . . .
– Salida de potencia 128. . . . . . . . . . . . . . . . . . .
X2A
– Accionamiento 125. . . . . . . . . . . . . . . . . . . . . .
– Resolución 125. . . . . . . . . . . . . . . . . . . . . . . . .
– Salida de potencia 125. . . . . . . . . . . . . . . . . . .
X2B
– Accionamiento 126. . . . . . . . . . . . . . . . . . . . . .
– Contador 126. . . . . . . . . . . . . . . . . . . . . . . . . . .
– Resolución 126. . . . . . . . . . . . . . . . . . . . . . . . .
– Salida de potencia 126. . . . . . . . . . . . . . . . . . .


Sin nuestra expresa autorización, queda terminantemente prohibidala reproducción total o parcial de este documento, así como su usoindebido y/o exhibición o comunicación a terceros. De los infractoresse exigirá el correspondiente resarcimiento de daños y perjuicios.Quedan reservados todos los derechos inherentes, en especial los depatentes, de modelos registrados y estéticos.
Copyright:Festo AG & Co. KGPostfach73726 EsslingenAlemania
Phone:+49 711 347-0
Fax:+49 711 347-2144
e-mail:[email protected]
Internet:www.festo.com
Original: deVersion: 1510b