centro nacional de investigacion y desarrollo … pedro rafael... · s.e.p. s.e.i.t. d.g.1 .t....
TRANSCRIPT
S.E.P. S.E.I.T. D.G.1 .T. CENTRO NACIONAL DE INVESTIGACION
Y DESARROLLO TECNOLOGICO
- .
.
SISTEMA SELECTOR DE ' ESQUEMAS DE ADAPTACION PARA CONTROLADORES PID
T E s I s O BEHIPET
PARA OBTENER EL GRADO DE
MAESTRO EN CIENCIAS EN INGENIERIA ELECTRONICA * T A i > P R CE S E N
1 3 a l N 3 3 PEDRO RAFAEL MENDOZA ESCOBAF 13WllmNI 30 OüiM3
Cuernavaca, Mor. Octubre de 1991
S ( I P s 1 S T E M A NACIONAL DE INSTITUTOS TECNOLOGICOS
atro Nacional de Inve6tigación y Desarroiio Tecnológico
ACADEMIA DE LA MAESTRIA EN INGENIERIA ELECTRONICA
Cuernavaca, Mor., a 10 de octubre de 1991.
Dr. Juan Manuel Ricaflo Castillo Director del CENIDET P r e s e n t e .
At-n.: M.C. Alejandro Dlaz Sánchez Coord. de Blectrónica.
Por este conducto, hacemos de su conocimiento que. después de - haber sometido a revisión el trabajo de tesis titu1ado"SISTEMA. SELECTOR DE ESQUEMAS DE ADAPTACION PARA CONTROLADORES PID". de- sarrollado por el Ing. PEDRO RAFAEL MENDOZA ESCOBAR y habiendo cumplido con todas las correcciones que se le indicaron, esta- mos de acuerdo en que se le conceda la autorización de impresión de la tesis, y la fecha de exhen de grado.
Sin otro particular, quedarnos de usted.
Comisibn Revisorai, ., \ ,
Dr. &c Edgar N..Sdnchez C
soI>BiSmU HACIONAL DE INSTITUTOS TECNOLOOICOS'
sntro Nacional de Investigación y Desarrollo Tecnológico ,
DI RECCI ON CQQRD. ACADBMICA OFICIO No. 069/91
Cuernavaca. Mor., a 18 de Octubre de 1991.
ING. PBDRO RAFAEL MENDOZA ESCOBAR CANDIDATO AL GRADO DE MAESTRO EN CIKNCIAS EN INGENIERIA BLBCTRONICA P R E S E N T E .
Despu6e de haber sometido a reviei6n eu trabajo de Teeie titula- do :
"SISTEMA SELECTOR DE EWEHAS DE ADAPTACION PARA CONTROLADORBS - PID" . Y habiendo cumplido con todae las indicaciones que el Jurado Re-- visor de Teeie le hizo, ee le comunica que se le concede autori-- zacibn para que se proceda a la impresión de la misma. como re- - quisito para la obtención del grado.
Sin otro particular, quedo de ueted.
I
I
cenidet / Interior Internado Palmlrr S/N C.P. 62490 Aputado PwtJ 4 . a ~ C.P. ea481 c~ernavica. mor. m6dm
m (7s) 18-77-41 I 17s) ia-70- i~

Te doy Gmcias, por @ a m ser.
Dedleo esia memoria de tesis a:
Mis padms.
Mi abueüra &a&)),
Mis hennanos y loda mi fhmiüa.
Expmw el más sincem agm&cim&nto a rodar aquellas ~ ~ S O M S que parii&amn en el desarrolb de esie *o, especialmenre al Dr. Edgar N. Sánchez Campems, y a h fhmiüa Salgado Salgadb por dame una segun& Msa.
Agmdezco a mis compaAcms y amigos:
del Deparlamento de Equipos Meainiws,
del CENIDET
de la R e Eyudl<inrü IEEE-CENIDET,
del Depa&mento de E n e ~ g h Nucleor,
Reconozco las oporlticiones y faciii&des dodos por el Consejo Nacional de Ciencia y Tecnologh y el InsnrUro de Investtgaciones EUcldms, dumnte el desarrollo de esie 1-0.
Es invaluable el m o r de los padres, como ianabih lo mwod de un amigo,
Asi que, ten tiempo gam gomr del amor d i los padres y la amisid de un amigo.
Y no se le olvide: sepadny se amigo.
PRME
CONTENIDO
Introdución . . . . . . . . . . . . . . . . . . . . . . . . .'. . . . . . . . . . . . . . . . Cepltulo 1
CONTROL AUTOSINTONIZABLE BASADO EN SISTEMAS EXPERTOS
1.1 Controladores Autosintonizables . . . . . . . . . . .*. . . . . . . . . . . 3' 1.2 Control Experto . . . . . . . . . . . . . . . . . . . '. . . . . , . . . . , . . . . . .
1.2.1 Objetivos de los Controladores Expertos . . . . . . . . . . . . . . . . . 1.2.2 1.2.3 Capacidades y limitantes del Control Experto
Principales técnicas en el Control Experto . . . Y . . . . . . . . . . . . . . . . . . 4 . . . . . . . . . . . . . . . . . . 4
. , . . vi¡
. . . . . 1
. . . . . 3
. . . . . 3
1 .'3 sistemas Expertos en Sistemas de Control . . . . . . . , , . . . . . . . . . . . . . 6 1.3.1 Arquitectura del Sistema Experto para Sistemas de Control . . . . . . , . . 6 1.3.2 Técnica utilizada para el controlador . . . . . . . . . . . . . . . . . . . . . . . . . 6 1.3.3 "Hardware" y "software' utilizado -en la impkmentacidn del Sistema
' Experto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 1.3.4 Analisis y diseño de un Sistema Experto pare Sistemas de Control . . . . 7
Capítulo 2 PLANTEAMIENTO DE UN CONTROLADOR AUTOSIN~ONIZABLE'
BASADO EN SISTEMAS EXPERTO 1
. . . .
2.1 Controlador autoajustable propuesto . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2 Controlador . . :. . . . . . . . . . . . . . . . . . ._. , . . . . . . , 1:. . . . . . . . . . 10 2.2.1 Discretizacidn del controlador . . . . . . . . . . . . . . . . . , . . . . . . . . . . -1 1 2.2.2 Seleccidn del periodo de muestre0 . ., . . . . , . . . :. . . . . . . . . . . . . . . 12 2.2.3 ' Circuito "Wind up" . . . . . . . . . . . . . . . . . ,. . . . . . . . . . . . . . . . . . . 13 2.2.4 Cambio de modo manuallautomdtico . . . . . , . . . . . . . . . . . . . . . . . . 14
, , ? 'Y . 2.3 Módulo Presintonizador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16 2.3.1 Funcionamiento del mddulo Presintonizador .' . . . . . . . . . . . . . . . . . . 16 2.3.2 Diseño del controlador especificando I Güw) I y Mod . . . . . . . . . . . . . .:. . 19
2.4 MóduloSintonizador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22 23 . . . . . . . . . .. . . . . . . . . . . . . . .<. . . .
2.4.1.1 . . .. . . . . . . . . . 24
2.5 Mddulo Supervisor , , , . . .'. . . . . . . . . . : . . . :. . . . . . . . . . . . . . . . . 28 2.5.1 Funcionamiento del m6dulo Supervisor .. . . . I . . . . . . . . . . . . . . . i . .-: 28 2.5.2 Formas de la respuesta del error . . . . . . . . . . . . . . . . . . '; . . . . . . . ." 30
2.6 Funciones del Sistema Experto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32 2.6.1 Funciones del Sistema Experto en el controlador . . . . . . . . . . . . . . . . 32 2.6.2 Funciones del Sistema Experto en el mddulo Presintonizador . . . . . . . . 33 2.6.3 Funciones del Sistema Experto en el mddulo Sintonizador . . . . . . . . . . 33
. . .. j . .
2.4.1 Reconocimiento de Trayectoria Funcionamiento del Reconocimiento de Trayectoria . -
l i
. ,. . .

Capitulo 5 CONCLUSIONES
5. Conclusiones . . . . ! . 81 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Referencias 84 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Apéndice A GUlA PARA IMPLEMENTAR UNA TECNICA EN U FRECUENCIA
PARA EL MODULO SINTONIZADOR
A.1 Obtencidn de 6 y wd utilizando la representation conforme . . . . . . . . . 88 A.2 Diseño del controlador especificando 6 y wd .................... 90 A.3 Funcionamiento del m6todo en la frecuencia .................... 91
Apéndice B LiNEALiZACiON DEL MODELO MATEMATICO DEL PROCESOS DE TANOUES . . . . . . . . . . . . . . . . . 93
Apdndica C CODIGO DE ALGUNOS PROGRAMAS DE COMPUTO . . . . . . . 94
Apéndice D REGLAS DE U BASE DE CONOCIMIENTOS Y ARCHIVO DE COMANDOS . . . . . . . . . . . . . . . . . . 99
I
iii
_-
LISTA DE SIMBOLOS '- i
k
A,, A, Area de las seccidn transversal de los tanques (20m'). '
B Bias del relevador. I <
b . *
DO DMP DT D6 EO
Thmino independiente de la recta ajustada. Accidn derivativa del controlador. Diferencia entre el sobrepico deseado y el calculado. Diferencia entre el perlodo dado y el calculado. Diferencia entre el amortiguamiento deseado y el calculado. Error del sistema en el instante nh: diferencia entre la referencia y la salida.
1 > . * I
Em Entrada manual. ES Diferencia entre Uc y Ua. , 80 F Frecuencia. F,, F.,, Flujos de salida de los tanques (m'ls). F, GO GOO H Histéresis del relevador. h Perlodo de muestreo. h,,, hO2 Puntos de operacidn deseados (mi. h,, h, Nivelas de los tanques (m). 2
10 Accidn integral del controlador. )i
K Ganancia del controlador. _I
K, K, Ganancia del motor. K, Ganancia del sensor (1). , K, Ganancia del actuador (1). K,, K, Restricciones a los flujos de salida (0.14142 ma%i k Instante (nh) donde se promedian N valore8 del erlor. L Número de valores a interpolar en el ajuste de la recta. M Amplitud del relevador. ' -. Mpd Sobretiro deseado. Me Margen de fase dado. Múd Margen de fase deseado. MB' Margen de fase calculado. * m Pendiente de la recta ajustada. N Funcidn descriptiva del relevador. N Número de valores de e(k1 que se promedian. Nn Relaci6n entre el perlodo de amortiguamiento Y h. Nr Número de muestras por tiempo de rBSPUBSta. n Instante de muestreo InCZ'). p() Acci6n proporcional del controlador. PD Potencia demandada al turbogenerador. RT Indica que 10s parametros son calculados con las ecuaciones (2.33.
2.341 y (2.351. so Indica que 10s parametros son calculados con las ecuaciones (2.38.
2.391 y (2.401. S Operador de Laplace. T Parlodo de oscilación.
Promedio de los N valores absolutos del error. ,.
I t Flujo de entrada (variable manipulada, 0.6 m'/s máximo). Funcidn de transferencia para el proceso. Funci6n de transferencia del controlador.
Coeficiente de regulacidn de velocidad.
iv
__.. i . - .....
LISTA DE FIGURAS
Figura 1.1 Diagrama de bloques de un controlador autosintonizado
Figura 2.1 Esquema del control propuesto . ....................... Figura 2.2 Esquema del controlador PID . . . . . . . . . . . . . . . . . . . . . . . . . Figura 2.3 Circuito de 'Anti Wind Up'. . ........................ Figura 2.4 Circuito de cambio de modo (controlador completo) . . . . . . . . . . Figura 2.5 Relevador en el lazo de control Figura 2.6 Parámetros del relevador Figura 2.7 Efectos de los parámetros del controlador en el diaarama de
indirecto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . .
. Nyquist . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figura 2.8 Respuesta transitoria para cambios en referencia . . . . . . . . . . . . . Figura 2.9 Respuesta del error . . . ............................. Figura 2.1 O Formas de la respuesta del error ....................... Figura 2.11 Caracterización de la forma de la respuesta . . . . . . . . . . . . . . . Figura 2.12 Diagrama de flujo del algoritmo del módulo Supervisor . . . . . . . Figura 2.13 Formas de la respuesta a perturbaciones del I e(nh) I . . . . . . . . Figura 2.14 Interaccidn entre los módulos . . . . . . . . . . . . . . . . . . . . . . . . . Figura 3.1 Diagrama a bloques del sistema de tanques . . . . . . . . . . . . . . . . Figura 3.2 Esquema del proceso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Figura 3.3 Diagrama a bloques del turbogenerador . . . . . . . . . . . . . . . . . . . Figura 3.4 No linealidades del SR y el SM . . . . . . . . . . . . . . . . . . . . . . . . . Figura 3.5 La respuesta no pasa el umbral de histdresis . . . . . . . . . . . . . . . Figura 3.6 Obtencidn de la ganancia del proceso .................... Figura 3.7 La respuesta s610 genera medio ciclo .................... Figura 3.8 Respuesta monótonamente creciente .................... Figura 3.9 Forma de la respuesta para cambios en referencia del 10% . . . . . Figura 3.10 Forma de la respuesta para cambios en referencia del 20% . . . . Figura 3.1 1 Forma de la respuesta a cambios en los parámetros (h.=5 mi . . . Figura 3.1 2 Forma de la respuesta a cambios en los parámetros (h.=8 mi . . .
Figura 3.14 Efectos de variar N para diferentes períodos de muestre0
Figura 3.16 Rectas de ajuste para diferentes valores de w,
Figura 3.13 (a) Efectos de variar N en el valor de B(k) y (bl la forma de la respuesta a los cambios de potencia ....................... . . . . .
Figura 3.15 Respuesta del sistema de control para diferente períodos de muestre0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figura 3.1 7 Rectas de ajuste para valores de L no calculados con la ecuación (3.20) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Figura 4.1 Estructura del Sistema Experto ........................ Figura 4.2 Arbol de búsqueda para definir cuál módulo debe funcionar Figura 4.3 Arbol de búsqueda para definir la forma de la respuesta
. . . . . . . . . . .
Figura A. l Transformación conforme de lineas de u en el planos al plano Gts)
Figura A.2 Transformacidn conforme de un cuadrado curvilíneo cerca del . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
punto -1 +jO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Figura A.3 Transformacidn conforme utilizada en la referencia E11 . . . . . . .
1 9
11 14 15 16 17
20 22 23 25 27 30 31 33 36 37 38 38 40 40 41 41 54 54 55 55
70 70
71 72
72 74 77 78
87
88 89
vi
INTRODUCCION
controladores utilizados en 10s Procesos industriales tienen funciones de y Para su funci6n de regulacibn. la mayorfa de estos controladores son del tipo Proporcional + inteQral+ derivative (PID). LOS controladores con esta acci&, de control, se sintonizan para que el proceso tenga un desemperio deseado. Como las condiciones de operación- cambian, el funcionamiento del proceso degradarse y su desemperio no Ser el adecuado. Para Contrarrestar los cambios en las condiciones de operaci6n, el controlador debe ser reajustado. Aunque existen diferentes m&odos para el sintonizado de [OS controladores PID, 0s comi5n encontrar que muchos de están Pobremente sintonizados, por lo tanto el desempeiio del proceso no es el mejor. Algunas razones de esto es que existen técnicas muy diversas para el sintonizado del controlador y, también. diferentes formas de la acción de control (diferente forma de implementarse. - de la estructura, de la versibn). Un problema adicional es que el reajuste del controlador es hecho por personal del departamento de producción o del departamento de instrumentaci6n y control, que no conocen el proceso tan bien como lo conoce el operador.
De la necesidad de ajustar los parámetros del controlador, descargando al personal de .este trabajo, naci6 el control adaptable (controladores que de manera automática ajustan sus parámetros). Muchos sistemas de control adaptable se han desarrollado para regular el comportamiento dinámico de un modelo del proceso; algunos sistemas son el modelo de referencia (MRAS) y el autosintonizado (STR). En la práctica, estos controladores pueden fallar cuando .el comportamiento dinámico del proceso es diferente al del modelo; por lo que no garantizan la estabilidad de los procesos en presencia de dinámicas no modeladas, o en presencia de perturbaciones en la salida. Actualmente, en la implementacibn de controladores adaptables, se busca la manera de garantizar robustez y ampliar sus capacidades, integrando varios esquemas de control y utilizando elementos heurfsticos.
En la literatura t6cnica se ha propuesto una nueva herramienta para complementar las acciones de los controladores adaptables. Esia herramienta utiliza una rama de la Inteligencia Artificial conocida como Sistemas Expertos. Los Sistemas Expertos permiten un fácil manejo de los elementos heurlsticos e integrar en un sol0 Sistema varias esquemas de control. Con la aplicación de los Sistemas Expertos a 10s controladores adaptables, específicamente en este trabajo a un controlador autosintonizable, se espera que estos resuelvan parte de los problemas que Presentan para su aplicaci6n. -
LOS problemas de una selecci6n difícil de la ley de Control Y el no tener Un controlador autosintonizado robusto' es motivo para investigar una alternativa de soluci6n a estos problema$, utilizando como herramienta de desarrollo 10s Sistemas Expertos. Esta nueva herramienta ha demostrado ser, en sus iniCi0S;una alternativa de soluci6n a 10s problemas de la implementaci6n de los controladores autosintonizables. y en general de 10s controladores adaptables, pero aún no se plantea COmO Una soh~ci6n definitiva.
an'. 51. l'?,
. .
i
Y .
. . I. ., I i ,. >rf 1
i: a * . Ti. .* '.
.- , .I , Y ..
Capltulo 4 lmplementación del Sistema Experto
En este capltulo se presenta la forma en que se implement6 el Sistema Experto. Se menciona la forma de encadenar los conocimientos para lograr obtener una conclusibn. Los conocimientos utilizados para formar la Ease de Conocimientos son el resultado de los experimentos presentados en el capltulo tres.
Capltulo 5 Conclusiones.
Se presentan las conclusiones generales de la utilización de cada uno de los m6dulos y se dan algunos comentarios. También se mencionan desarrollos futuros relativos al trabajo.
En la parte final de la tesis, se anexan en apéndices: una gula de cómo implementar otra forma para reajustar los parámetros del controlador; el modelo del proceos de tanques linaaiizado, algunos programas de cómputo con los que se hicieron las simulaciones, y las reglas principales de la Base de Conocimientos.
ix
Capítulo 1
CONTROL AUTOSINTONIZABLE BASADO EN > >
sand de 1
i
. s n d da
SISTEMAS EXPERTOS
En este capítulo se describen en forma'genérica'los contróladores autosintonizabl&. Se mencionan algunas de los técnicas que se utilizan y los problemas que se presentan en su imPiementaci4n. También se menciona que la utilizaci6n de estos controladores se puede ampliar empleando los Sistemas Expertos. Se presentan los Controladores Expertos. Se mencionan los objetivos que deben tener en un sistema de control, algunas de las técnicas que pueden utilizar y sus limitantes v caoacidades. En la Darte ~- - - ~ -- . . ~~~~~~ ~~
final del capítulo, se presenta una descripción de los Sistemas Expertos aplicados a los Sistemas de Control. , . ,- .,
.. . . ,:I ,.
1.1 Controladores Autosintonizables
Los controladores autosintonizables son un esquema .particular de los considerados dentro del control adaptable. Algunos otros esquemas del control adaptable son el modelo de referencia y los esquemas derivados de la teoría de control estocástica. I'
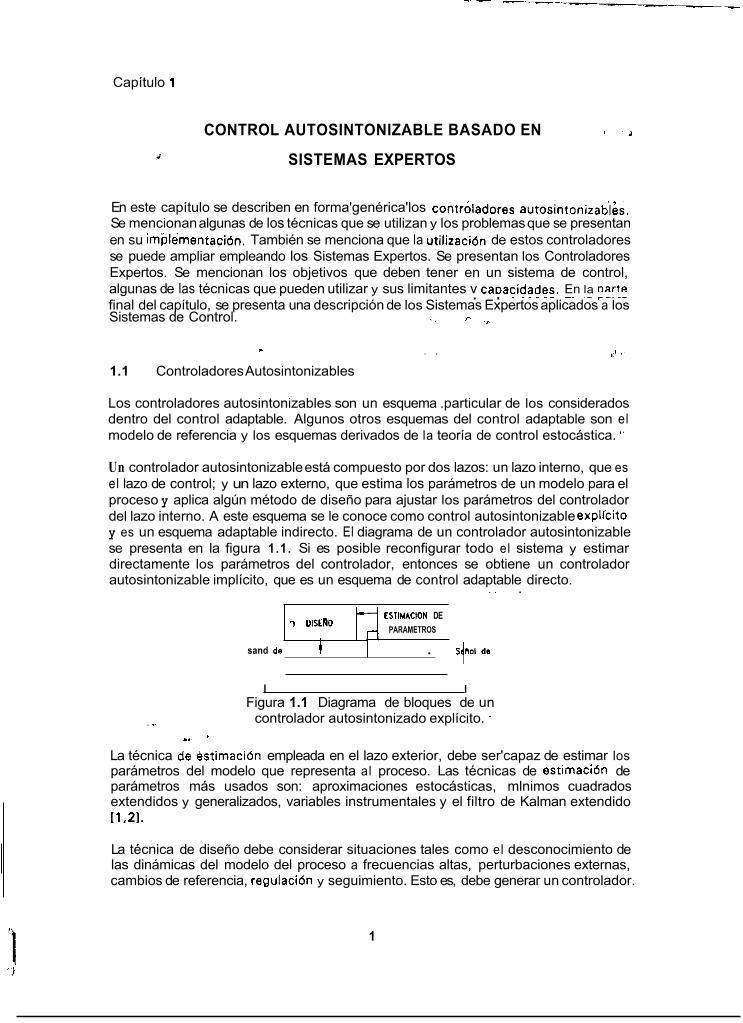
Un controlador autosintonizable está compuesto por dos lazos: un lazo interno, que es el lazo de control; y un lazo externo, que estima los parámetros de un modelo para el proceso y aplica algún método de diseño para ajustar los parámetros del controlador del lazo interno. A este esquema se le conoce como control autosintonizable expllcito y es un esquema adaptable indirecto. El diagrama de un controlador autosintonizable se presenta en la figura 1.1. Si es posible reconfigurar todo el sistema y estimar directamente los parámetros del controlador, entonces se obtiene un controlador autosintonizable implícito, que es un esquema de control adaptable directo.
. . .
ESTIYACION DE PARAMETROS 7 OlSEAO
I I Figura 1.1 Diagrama de bloques de un
controlador autosintonizado explícito. '
La técnica de'estimación empleada en el lazo exterior, debe ser'capaz de estimar los parámetros del modelo que representa al proceso. Las técnicas de estimaci6n de parámetros más usados son: aproximaciones estocásticas, mlnimos cuadrados extendidos y generalizados, variables instrumentales y el filtro de Kalman extendido 11.21.
. .. I , . '
La técnica de diseño debe considerar situaciones tales como el desconocimiento de las dinámicas del modelo del proceso a frecuencias altas, perturbaciones externas, cambios de referencia, regulaci6n y seguimiento. Esto es, debe generar un controlador.
"1 1

I
a)
b)
C)
1.2
aplicar un gran volumen de conocimientos heurísticos. Los Sistemas Expertos se describen en 120.21 1. De las motivaciones para desarrollar controladores autocintonizables con base en Sistemas Expertos se tienen las siguientes:
El deseo de desarrollar controladores más robustos. Esta dirección ha sido marcada por Astrom, Anton y Arzen 1221 y demás desarrollos de Arzen 1231. Desarrollos similares se describen en 124.25.26.27.281.
Es deseable prevenir deterioros en el funcionamiento de los controladores que pueden ser resultado de una degradación en la identificación del proceso 129,301.
Es deseable diseiíar Sistemas de Control reconfigurables que puedan mantener las características de funcionamiento deseadas para una amplia variación de las condiciones de operación. Un ejemplo res el control reconfigurable de aviones reportado en 131.32.331.
I * -
Control Experto
Los Controladores Expertos utilizan las técnicas de los Sistemas Expertos para ampliar el rango de utilización de los sistemas de control. Esto lo logran al incorporar técnicas que mejoran el funcionamiento, la confiabilidad y la robustez del control.
Los Controladores Expertos también se aplican a controladores sencillos, por ejemplo: los controladores del tipo Proporcional +integral + derivativo tienen un algoritmo matemático para calcular la acción de control y un conjunto de condiciones 16gicas de seguridad. Las condiciones de seguridad a menudo dominan el código del programa del controlador, dificultando modificar el código o el poder leerlo. Utilizando un Control Experto, se tiene la ventaja de dar una forma clara para la separación de las condiciones de seguridad y los algoritmos de cómputo, simplificando el desarrollo del programa del controlador y su mantenimiento.
1.2.1
Algunos de los objetivos de los Controladores Expertos son:
a l
b l
Objetivos de los Controladores Expertos.
L,
Crear un asistente que pueda tomar decisiones expertas en Ilnea.
Tener un programa que actúe como una interfase experta para los programas de análisis numérico.
c) Sintonizar automáticamente el controlador.
d) Soportar Sistemas de Control reconfigurables, seleccionando la ley de control apropiada, basados en la situación actual del proceso.
Identificar cambios en los pardmetros del modelo del proceso.
Diagnosticar posibles fallas de componentes.
e)
f1
3
manera que se permita extenderlos yto modificarlos.
El) Seleccionar los parámetros de control rnds apropiados para la situación que se presente.
Algunos problemas que se tienen en la implementación de los Controladores Expertos son:
a) Estabilidad. Cómo afecta el alterar los valores de los pardmetros del controlador la estabilidad del sistema de control'. En 1341 se argumenta que no presenta problemas dado que ésta ha sido la política utilizada por años en el desarrollo de Sistemas de control.
Maneiadores de la Base de Datos. La habilidad de monitorear los parámetros y el funcionamiento del proceso, y ajustar los parámetros del controlador requiere de un manejo cuidadoso de los datos. En 1351 se menciona que un problema en el prototipo implementado es el manejador de la Base de Datos.
Consistencia de la Base de Conocimientos. Esta se refiere a los diferentes tipos de razonamientos que se pueden dar:
i.
b)
C) +
Razonamiento no monótono. El Controlador Experto opera con datos dindmicos. por lo que se requiere que automáticamente reconozca formas o patrones que no estaban incluidas en su Base de Conocimientos inicial. * I
ii. Razonamiento temporal. Un Controlador Experto debe ser hábil para representar el tiempo y razonar sobre el pasado, el presente, los eventos futuros y la secuencia en que pueden ocurrir.
Razonamiento en tiempo limitado. Este problema se presenta por lo lento que son actualmente los Sistemas Experios para obtener una conclusión.
iii.
En la literatura se han reportado controladores autosintonizables con base en los Sistemas Expertos. Por ejemplo, en 1221 se presenta un controlador que conjunta las técnicas de: monitor principal, autosintonización (control de varianza mlnima), control de respaldo (tipo PID) y estimación de parámetros. En 1231 e1 Sistema Experto tiene como meta verificar el funcionamiento del sistema de control y aprender cuanto sea posible del proceso controlado. Esto se logra ejecutando inteliQentemente diferentes algoritmos matem8ticos; la acción de control en I231 es tipo PID. En 1291 el Sistema Experto se propone como un supervisor que tiene las acciones de monitorear la estabilidad, identificar los pardmetros para un modelo del proceso y sintonizar el controlador (en base a la ubicación de polos). Algunos otros trabajos están reportados en 140,41,421. Los modelos de procesos utilizados para validar los controladores desarrollados son: una planta? de tercer orden con retardo variable 1291. procesos de
controladores de varianza mínima y cuadrático lineal. Una posible división de la aase de Conocimientos del Sistema. Expert0 puede ser: reglas para la estimación del nivel de ruido, reglas para el cbmputo de los parámetros, reglas para supervisar la acción del controlador y comandos decodificadores de reglas.
1.3.3 "Hardware" y "software". utilizado en la implementación del Sistema Experto
Muchas de las implementaciones involucran el uso de dos procesadores; uno para hacer el razonamiento y otro para el control en tiempo real; en 1371 se reporta la utilidad de esta arquitectura. En I381 se reporta el uso de un controlador programable para implantar un sintonizador experto de controladores tipo PID.
Los lenguajes de programación que más se utilizan para la implementación de los Sistemas Expertos es: Pascal, C, Prolog, Lisp. Además se han desarrollado programas de diseño de Sistemas Expertos tales como el PC Consultant Plus, Exsys y OPS5.
~
.,
: * . . l
1.3.4 Análisis y diseno de un Sistema Experto para Sistemas de Control
Las Siguiente preguntas se aplican para el análisis y el diseño de un Sistema Experto para sistemas de control I391:
al
b)
c l
¿ Cuáles son los objetivos de controlador 7
i Puede el control convencional cumplir con los objetivos de control ?
( Cuál es el objetivo de utilizar el Sistema Experto ?
I. Sintonizar el controlador. II. Reconfigurar la estructura del controlador para mantener un
funcionamiento satisfactorio sobre un amplio rango de variaciones en las condiciones de operación. Detectar fallas y mantener una operacibn segura del proceso hasta que sea tomada una acción. Mantener un balance entre t4cnicas que aplique el Sistema Experto. Incorporar la experiencia de un operador. Controlar el sistema sin utilizar la teoría de control I i Por qué es deseable esto 7)
iii.
iv. V.
vi.
d) Basado en los objetivos del Sistema Experto, ¿ Cuál es la forma apropiada para implementar el Sistema Experto y el control en tiempo real ? Segbn los requerimientos de estas selecciones, considere lo siguiente:
I.
ii. iii. iv.
Se controla un solo proceso. Es un proceso que involucra multitareas. Son necesarios más de dos procesadores. Es necesario el desarrollo de programas o existe un "software" adecuado, para implantar la máquina de inferencia.
e) i Cbmo va a ser adquirido el conocimiento ?
7

, " Capftulo 2 .
. .
' PLANTEAMlENTO.DE UN CONTROLADOR AUTOSINTONIZABLE . .. , .;y I .
BASADO EN SISTEMAS EXPERTO : i ,'
, En este capltulo se plantea el desarrollo' de un 'esquema de sintonización, de controladores ide una entrada una salida) que consiste de tres módulos: Presintonización , Sintonización y Supervisión. .El funcionamiento de estos módulos se cóordina y supervisa por un' Sistema, Experto. Además, se presenta la forma-de implementar la acción de control PID.
EI piinteamiento que se presenta en &te capltuio 8; teórico, y. no se han resuéito aiounos problemas para implementar la simulación funcional de los niódulod. Las soluciones a esfos problemas se obtuvieron después de realizar algunas,simulaciones, presentadas en el capltulo tres.
. " . '
.. * 1.
,
2.1 '. Controlador autoajustable propuesto
En el capltulo uno se citaron algunas referencias de controladores autosintonizados basados en Sistemas Expertos I22,23,29,30,35,38,40,41,42,43,44,45,461. Estos controladores tienen implementadas, de una u otra manera, una técnica de supervisi6n y una técnica (o varias) para reajustar los parámetros del controlador. Las diferencias de estos trabajos están dadas por las técnicas empleadas y la forma en que se desarrollaron. por ejemplo: en (38,43,44,451 se utilizan sólo elementos heurlsticos para reajustar los parámetros del controlador y en 129.30.40.461 se estima un modelo del proceso. También, se menciona que serla ventajoso contar con una técnica que no requiera información del proceso para su funcionamiento, sino por el contrario. que obtenga la información que requieren algunos sistemas de control autosintonizables. Asl, tomando como ejemplos los controladores mencionados en las referencias anteriores, el controlador que se plantea en este capltulo tiene los siguientes módulos: Presintonización, Sintonización y Supervisión (figura 2.1 1.
Los módulos son coordinados y supervisados por un Sistema Experto. El módulo Supervisor proporciona información del estado y de la forma de la respuesta del proceso al Cisterna Experto, con la cual éste toma la decisión de cuándo y cuál de los otros módulos funcione para reajustar los parámetros del controlador PID.
TOMA DE DECISIONES ANALISIS DE INFORMACION
PRESINIONIZADO SINTONIZA00
CONTROLADOR
Figura 2.1 Esquema de control propuesto.
9
hl Forma de implementar el algoritmo de control.
Algunos de estos factores se consideran de manera heurlstica en la implementación del controlador. Por lo que son raramente discutidos en los textos de la teoría de control 1221.
2.2.1 Discretizacidn del controlador
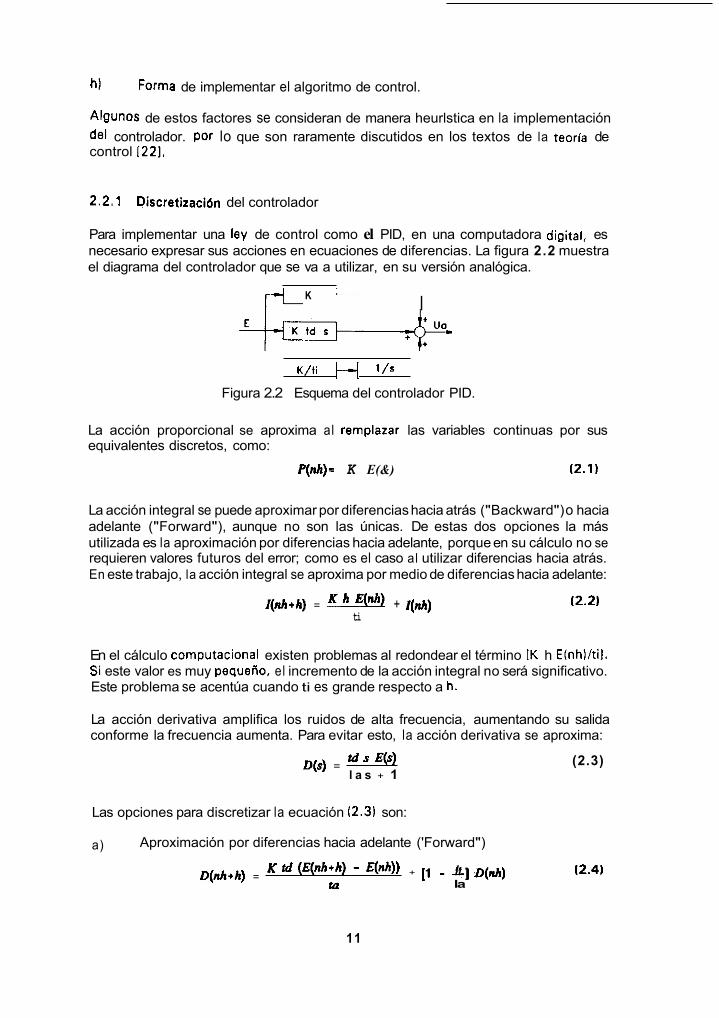
Para implementar una ley de control como el PID, en una computadora digital, es necesario expresar sus acciones en ecuaciones de diferencias. La figura 2.2 muestra el diagrama del controlador que se va a utilizar, en su versión analógica.
K I
K / i i H 1 /s
Figura 2.2 Esquema del controlador PID.
La acción proporcional se aproxima al remplazar las variables continuas por sus equivalentes discretos, como:
P(&)= K E(&) (2.1)
La acción integral se puede aproximar por diferencias hacia atrás ("Backward") o hacia adelante ("Forward"), aunque no son las únicas. De estas dos opciones la más utilizada es la aproximación por diferencias hacia adelante, porque en su cálculo no se requieren valores futuros del error; como es el caso al utilizar diferencias hacia atrás. En este trabajo, la acción integral se aproxima por medio de diferencias hacia adelante:
I(&+h) = - + I(&) ti
(2.2)
En el cálculo computacional existen problemas al redondear el término [K h Einhlltil. Si este valor es muy pequeiio, el incremento de la acción integral no será significativo. Este problema se acentúa cuando ti es grande respecto a h.
La acción derivativa amplifica los ruidos de alta frecuencia, aumentando su salida conforme la frecuencia aumenta. Para evitar esto, la acción derivativa se aproxima:
td s E(s) l a s + 1 D(s) = (2.3)
Las opciones para discretizar la ecuación (2.31 son:
a) Aproximación por diferencias hacia adelante ('Forward")
td (E(nh*h) - E(nh)) + [I - -1 h D ( d ) (2.41 la D(nh+h) =
ta
11
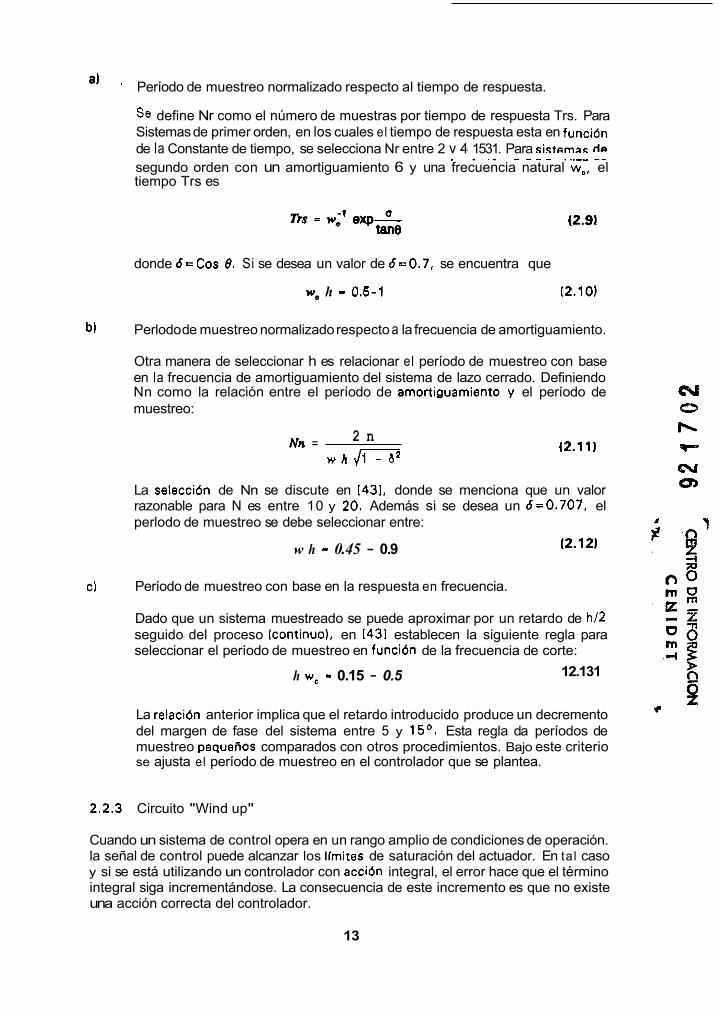
a) Período de muestreo normalizado respecto al tiempo de respuesta.
Se define Nr como el número de muestras por tiempo de respuesta Trs. Para Sistemas de primer orden, en los cuales el tiempo de respuesta esta en funci6n de la Constante de tiempo, se selecciona Nr entre 2 v 4 1531. Para sistnmac da - - - . -- segundo orden con un amortiguamiento 6 y una frecuencia natural w,, el tiempo Trs es
12.9)
donde 6=Cos 8. Si se desea un valor de 6=0.7. se encuentra que
W . h - 0.5-1 12.101
b l Perlodo de muestreo normalizado respecto a la frecuencia de amortiguamiento.
Otra manera de seleccionar h es relacionar el período de muestreo con base en la frecuencia de amortiguamiento del sistema de lazo cerrado. Definiendo Nn como la relación entre el período de amortiQuamiento y el período de Al muestreo: 8
2 n w h m
Nn = h
12.1 1) w- N QI La selecci6n de Nn se discute en [431, donde se menciona que un valor
razonable para N es entre 10 y 20. Además si se desea un 6=0.707, el perlodo de muestreo se debe seleccionar entre:
12.12) w h 0.45 - 0.9
C) Período de muestreo con base en la respuesta en frecuencia.
Dado que un sistema muestreado se puede aproximar por un retardo de h/2 seguido del proceso Icontinuo), en i431 establecen la siguiente regla para seleccionar el período de muestreo en funci6n de la frecuencia de corte:
12.131 h W, - 0.15 - 0.5
La relaci6n anterior implica que el retardo introducido produce un decremento del margen de fase del sistema entre 5 y 15O. Esta regla da períodos de muestreo pequeiios comparados con otros procedimientos. Bajo este criterio se ajusta el período de muestreo en el controlador que se plantea.
2.2.3 Circuito "Wind up"
Cuando un sistema de control opera en un rango amplio de condiciones de operación. la señal de control puede alcanzar los llmites de saturación del actuador. En tal caso y si se está utilizando un controlador con acci6n integral, el error hace que el término integral siga incrementándose. La consecuencia de este incremento es que no existe una acción correcta del controlador.
13
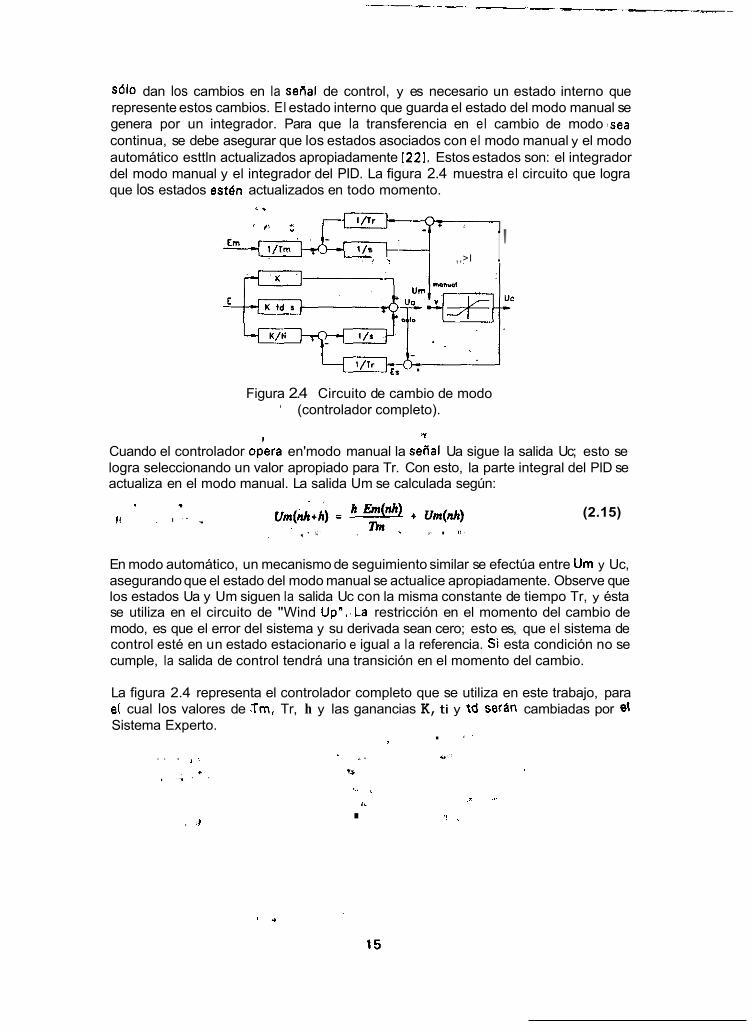
s610 dan los cambios en la seiial de control, y es necesario un estado interno que represente estos cambios. El estado interno que guarda el estado del modo manual se genera por un integrador. Para que la transferencia en el cambio de modo 'sea continua, se debe asegurar que los estados asociados con el modo manual y el modo automático esttln actualizados apropiadamente i221. Estos estados son: el integrador del modo manual y el integrador del PID. La figura 2.4 muestra el circuito que logra que los estados esttln actualizados en todo momento.
'1
' I ' :
? . ,,>I I "
Figura 2.4 Circuito de cambio de modo ' (controlador completo).
1
Cuando el controlador oiera en'modo manual la sefial Ua sigue la salida Uc; esto se logra seleccionando un valor apropiado para Tr. Con esto, la parte integral del PID se actualiza en el modo manual. La salida Um se calculada según:
(2.15)
En modo automático, un mecanismo de seguimiento similar se efectúa entre Urn y Uc, asegurando que el estado del modo manual se actualice apropiadamente. Observe que los estados Ua y Um siguen la salida Uc con la misma constante de tiempo Tr, y ésta se utiliza en el circuito de "Wind Up"..La restricción en el momento del cambio de modo, es que el error del sistema y su derivada sean cero; esto es, que el sistema de control esté en un estado estacionario e igual a la referencia. Si esta condición no se cumple, la salida de control tendrá una transición en el momento del cambio.
La figura 2.4 representa el controlador completo que se utiliza en este trabajo, para el cual los valores de Tm, Tr, h y las ganancias K, ti y td serdn cambiadas por el Sistema Experto. . i '
3
c,: I _ I 1 .. . . .
, f u . . , " ' . <
'% ,~ .,. . ., . , , t!
#
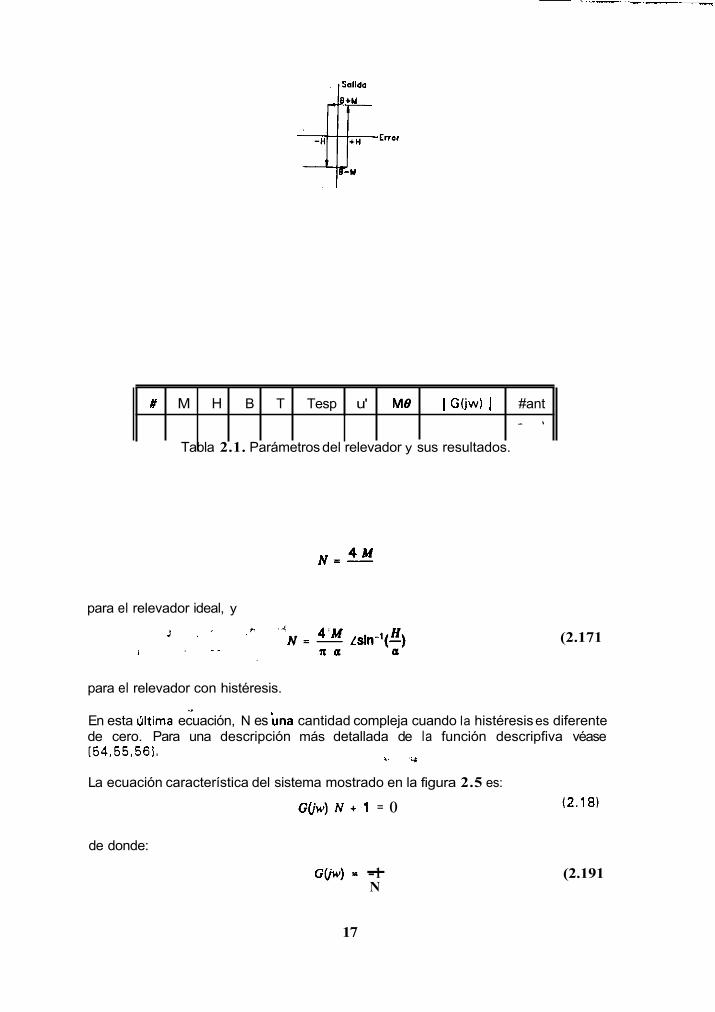
para el relevador ideal, y
i . '
1 . ..
M H B T Tesp u' Me I GUw) I #ant
(2.171
Tabla 2.1. Parámetros del relevador y sus resultados.
para el relevador con histéresis.
En esta iíltima ecuación, N es h a cantidad compleja cuando la histéresis es diferente de cero. Para una descripción más detallada de la función descripfiva véase 154.55.561.
La ecuación característica del sistema mostrado en la figura 2.5 es:
..
k . (
(2.18) G(jw)N+l = O
de donde:
C@) = - -1 (2.191 N
17
#
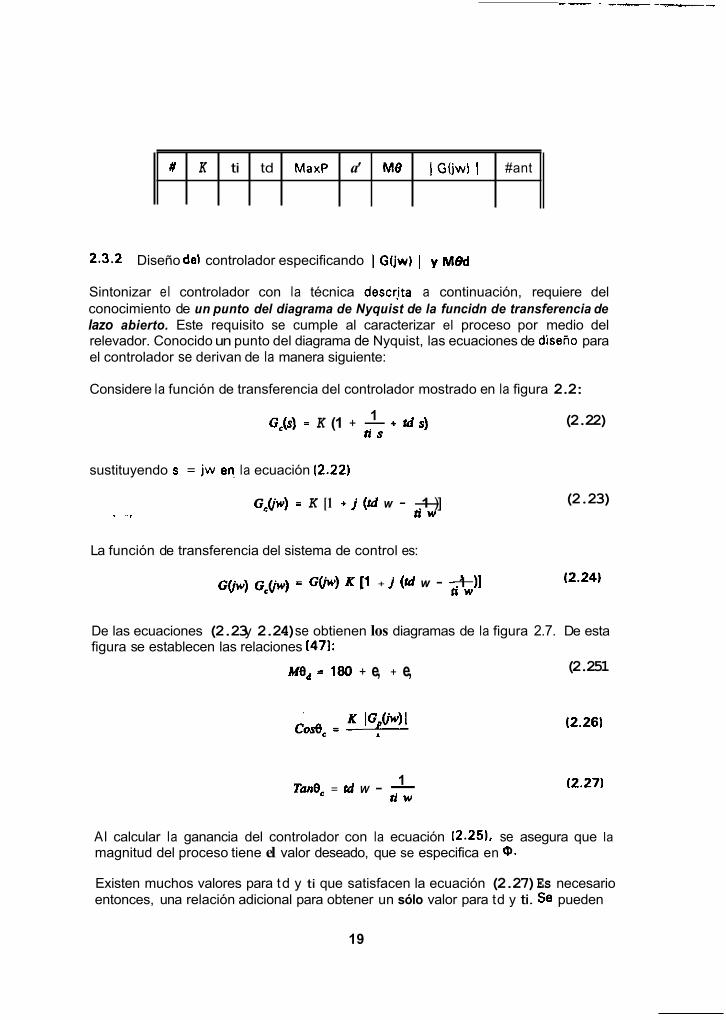
2.3.2 Diseño del controlador especificando I GUw) I y M a
Sintonizar el controlador con la técnica descrjta a continuación, requiere del conocimiento de un punto del diagrama de Nyquist de la funcidn de transferencia de lazo abierto. Este requisito se cumple al caracterizar el proceso por medio del relevador. Conocido un punto del diagrama de Nyquist, las ecuaciones de diseíio para el controlador se derivan de la manera siguiente:
Considere la función de transferencia del controlador mostrado en la figura 2.2:
K ti td MaxP a' Me JGljw) I #ant
1 t i s
C,(S) = K (1 + - + Id S) (2.22)
sustituyendo s = jw en. la ecuación (2.22)
C&w) = K [1 + j (rd w - -)] 1 (2.23) . I t i W
La función de transferencia del sistema de control es:
C h ) G,(!w) G h ) K I1 + j (rd w - -)I 1 (2.24) t i W
De las ecuaciones (2.23 y 2.24) se obtienen los diagramas de la figura 2.7. De esta figura se establecen las relaciones i471:
M e , = 180 + e, + e, (2.251
1 TMB, = id W - - t i W
(2.26)
(2.27)
AI calcular la ganancia del controlador con la ecuación (2.25). se asegura que la magnitud del proceso tiene el valor deseado, que se especifica en 4).
Existen muchos valores para td y ti que satisfacen la ecuación (2.27). Es necesario entonces, una relación adicional para obtener un sólo valor para td y ti. Se pueden
19
? ,,. GpUO.011 = 0.6564 1-164.780
Con la ecuación (2.251 se calcula &: 5
.. 450 = iao - 164.780 + BC, BC = 30.22'. , . A partir de (2.261 se calcula el valor de la ganancia:
CoS130.221 = 0.6564 K, K = 1.31642
. . Usando la ecuaci6n (2.291 el valor para td es:
td = 86.9837. !..' ,"
conociendo td, con la ecuación (2.28) se obtiene el valor de ti
ti = 347.9349. ~t
De esta manera el controlador diseiiado es:
G&) = 1.3164 (1 + 86.983 s + l ) 347.934 s 12.31)
Para comprobar que se cumplen las especificaciones de diseño se evalúa la expresión:
G,(jO.Ol) C(iO.01) = 1 L-<34.562 (2.321
Se tiene un margen de fase de 45.4376O a la frecuencia deseada y una magnitud igual a la unidad.
Observe que el valor de (o no tiene efecto al calcular las acciones derivativa e integral del controlador. Además, el valor de Oc puede ser negativo o positivo dependiendo de los valores de td y ti. Esto indica que se puede aumentar o disminuir la fase del sistema. Mas aún, dado que se especifica la magnitud y el margen de fase para el sistema en una frecuencia dada, este método de diseño permite llevar al sistema, teóricamente, a cualquier punto del diagrama de Nyquist.
*. ...
21

-__.-
2.4.1 Reconocimiento de Trayectoria
En el Reconocimiento de Trayectoria, la respuesta del sistema de control a una perturbación externa o a un cambio de referencia se compara con una forma deseada; la diferencia entre estas respuestas se usa para reajustar los pardmetros del controlador 144,451.
La forma de la respuesta deseada se especifica por:
Mpd Cobretiro deseado. 6d Amortiguamiento deseado. Td Perlodo de oscilación.
La señal utilizada para el Reconocimiento de Trayectoria es el error (diferencia entre la referencia y la salida del proceso) en'función del tiempo. En la figura 2.9 se muestran unas respuestas tlpicas del error.
u lit* III I
4.1 :'ik I . a) 11 Cambios ' u de 111) referencia II 4 II
b) perturbaciones externas J *
Figura 2.9 Respuesta del error.
En I44.451 se define Mp, 6 y T como sigue: a=- 4 - 4
% - & E2 El
M = --
12.331
12.34)
(2.35i
La forma de reajustar el controlador según 144,451 se basa en reglas heurlsticas, como: . .
a i La parte proporcional K, se debe ajustar para compensar los cambios en las acciones integral, y derivativa. ,
T = T3 - TI
, -
b i Las acciones integral y derivativa se ajustan para cumplir las relaciones: 12.36)
r . !! = 0.5 , T
23
Sistema subamortiguado
riu u ti m Y
Sistema subamortiguado
u11 tI1) -1,s -1.1
I # u i4 n Y II U B n Y is Sistema subamortiguado Sistema subamortiguado
I
I 4 U 11 n Y is U I n u Is
Sistema sobreamortiguado Sistema sobreamoniguado Cambios en referencia Perturbaciones externas
411
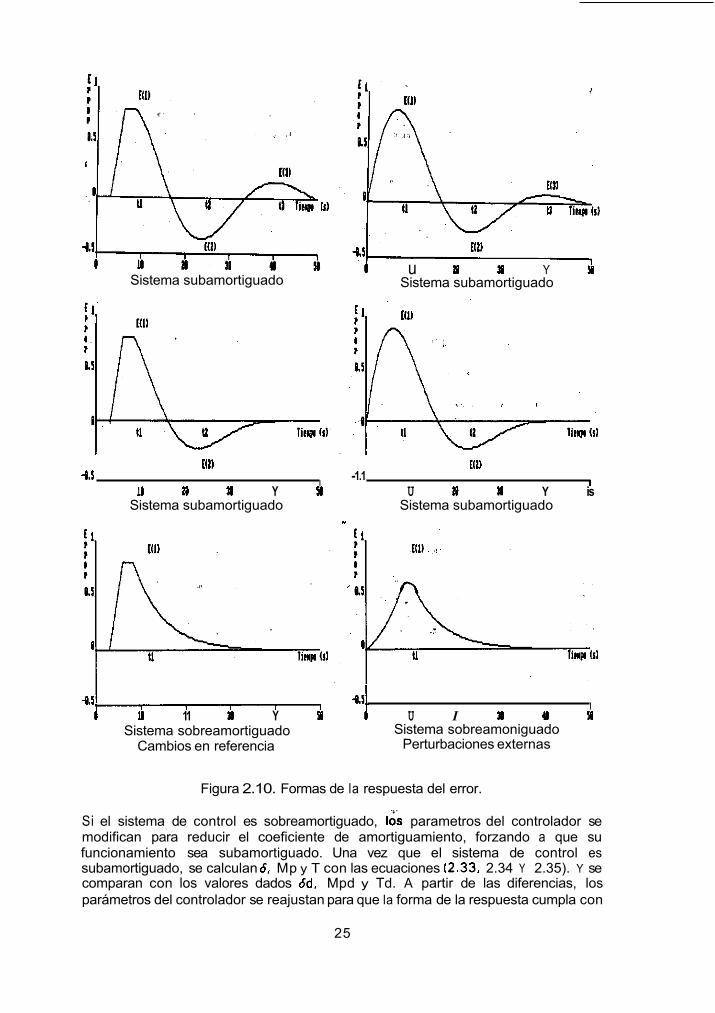
Figura 2.10. Formas de la respuesta del error.
Si el sistema de control es sobreamortiguado, 6 s parametros del controlador se modifican para reducir el coeficiente de amortiguamiento, forzando a que su funcionamiento sea subamortiguado. Una vez que el sistema de control es subamortiguado, se calculan 6, Mp y T con las ecuaciones (2.33, 2.34 Y 2.35). Y se comparan con los valores dados dd, Mpd y Td. A partir de las diferencias, los parámetros del controlador se reajustan para que la forma de la respuesta cumpla con
25
.f. >", i. :*
!...
! -
. 1
,
6 62 Proceso 1
# K ti td Mp Mp2 . .. .. .I'
<r ! '!. 1 i l iI
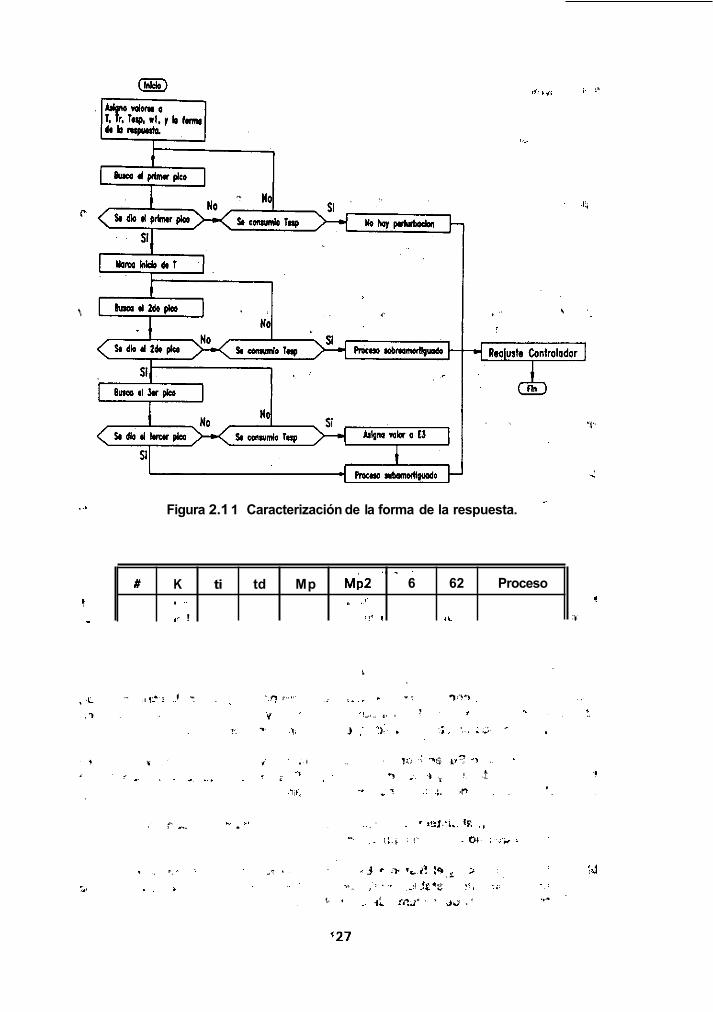
Figura 2.1 1 Caracterización de la forma de la respuesta. ~
.i
C l si 611 )>Wz el Sistema Experto considera que el sistema de control es inestable. 0 We está operando fuera de los límites de seguridad impuestos. En este caso, toma acciones correctivas inmediatas.
La condici6n (a) indica que no existe un cambio importante en el funcionamiento del sistema de control. Es decir, que no se ha dado un cambio de referencia, no existe una penurbaci6n o que los parámetros del modelo del proceso no han cambiado lo suficiente como para modificar la forma de la respuesta. En este caso s610 se promedia el valor B(1 1; es decir, el. máximo valor de k es uno.
La condici6n (b) sugiere que se tiene presente una anomalía en el sistema. Esta anomalla puede ser un error de estado estable, un transitorio o que el sistema se vuelve inestable. Para definir cuál de estas anomalías está presente, el módulo
. .
c - .. Supervisor ejecuta el siguiente procedimiento: , , . .
al Cuando el valor de 811) sobrepasa el valor de w1 se inicia el cálculo de L valores elk) y se van almacenando.
Se verifica que el en4simo valor de B ( k ) no sea mayor que w2; si esto sucede ' . I.. . %.a. . se toman acciones correctivas inmediatas. '
c) - .. Si el valor de B(k) no pasa 'el valor.de w; y-se tienen los L valores de B(k),-se L r hace un ajuste a una recta por el metodo de los, mínimos cuadrados, utilizando '. los L puntos de Biki.
..
b)
. .
:.. -' id .',,, ;>T . . . - , I... . . i ~
d) Del punto (c) se obtuvieron los coeficientes de una línea recta. a saber: '-' y - n x + b (2.421
A partir de los valores de m se presentan tres casos: - i . I, I i. Si m<O. se considera que se present6 un transitorio en el sistema de
control y su respuesta tiende a su punto de referencia.
Si m>O el sistema se'considera inestable o que se vuelve inestable.
Si el valor de m es igual a cero, o muy pr6ximo. y el valor de b es diferente de cero, se tiene presente un error de estado estable.
, : ii.
iii. : \ '
Además, cuando el valor de B(k) sobrepasa el ,valor de w1 se le indica al m6dulo Sintonizador 'que caracterice la forma de la respuesta según la t4cnica del Reconocimiento de Trayectoria, descrita en la sacci611 2.4.1. La informaci6n obtenida de esta caracterizaCi6n se utiliza para establecer qu4 tan cerca está la forma de la respuesta respecto a la deseada.
El diagrama de la figura 2.1 2 muestra el algoritmo para el módulo Supervisor descrito anteriormente.
29
. .. ' 1 I*(*/ Ir '- .,I . 1 h~ibll
i . '.. . , + .?*. ' -&I . !" ' " . $ '. ~. t.1 i ..a , . I .
+,..- *. 1 .I . . -- *%. , . ' .,,. &( > - s t
I 4
L l 1
:i
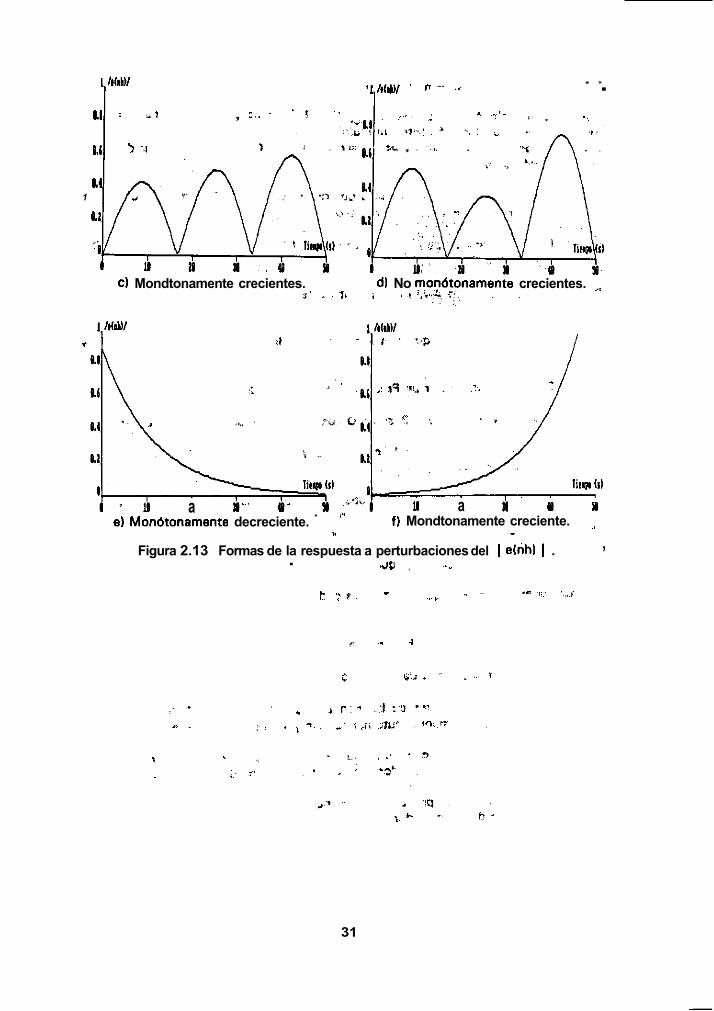
c) Mondtonamente crecientes. d) No mon6tonamente crecientes. . . ,I
3 ' . . y , i i , ' 4 . . .
,: 19 '.!,, 1 . ' .1.
' I I
; ..
hQ (11
u a P n . /.< a
f) Mondtonamente creciente. ,~ - e) Mon6tonamente decreciente. 1
Figura 2.13 Formas de la respuesta a perturbaciones del I ehh) I . , JU , .
.. - s= 'I/.' '....I t > r . - .,. "
31
INICIO -ZF?
SUPERVISOR NO " J
INICIALIZA . LOS PARAMETROS
PRESINTONIZADO . 1. .
PRESINTDNIZADOR
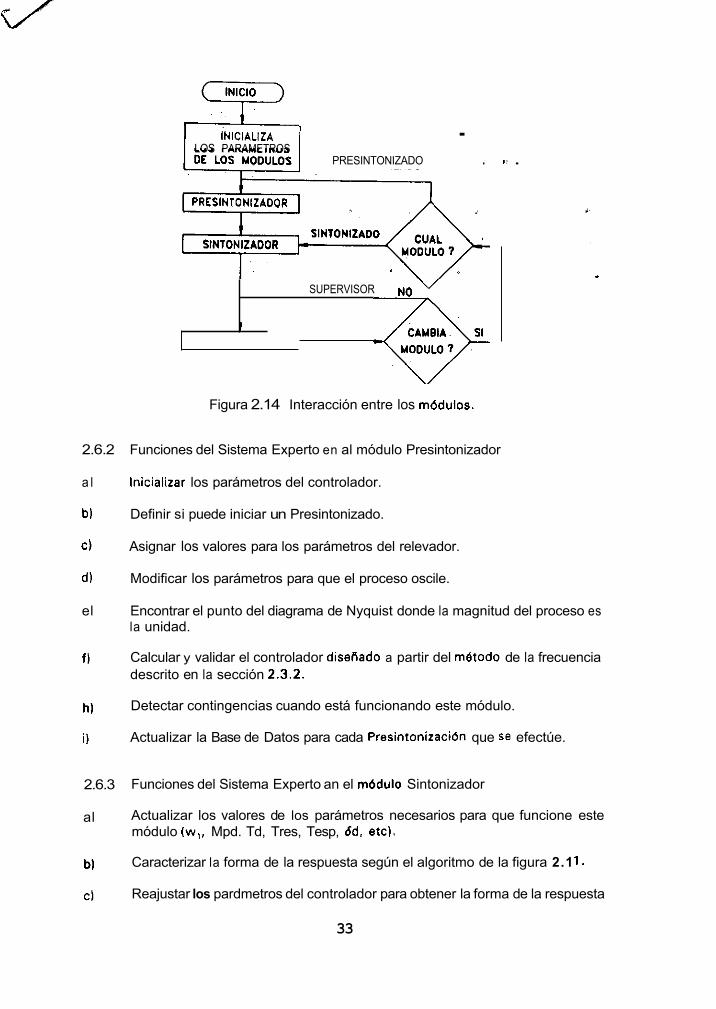
Figura 2.14 Interacción entre los m6dulos.
2.6.2 Funciones del Sistema Experto en al módulo Presintonizador
a l Inicializar los parámetros del controlador.
b l Definir si puede iniciar un Presintonizado.
C) Asignar los valores para los parámetros del relevador.
d) Modificar los parámetros para que el proceso oscile.
el Encontrar el punto del diagrama de Nyquist donde la magnitud del proceso es la unidad.
Calcular y validar el controlador disefiado a partir del metodo de la frecuencia descrito en la sección 2.3.2.
Detectar contingencias cuando está funcionando este módulo.
Actualizar la Base de Datos para cada Presintonizaci6n que se efectúe.
fl
h)
i)
2.6.3
al
Funciones del Sistema Experto an el m6dulo Sintonizador
Actualizar los valores de los parámetros necesarios para que funcione este módulo (w,, Mpd. Td, Tres, Tesp, ód. etcl.
Caracterizar la forma de la respuesta según el algoritmo de la figura 2.1 1.
Reajustar los pardmetros del controlador para obtener la forma de la respuesta
b)
cl
33
. . ,Capitulo 3 ,
EXPERIMENTOS Y ANALISIS DE RESULTADOS
En este CaPftulo Se describen los dos procesos utilizados en las simulaciones y los experimentos desarrollados para generar la Base de Conocimientos. LOS experimentos de cada módulo son presentados en forma independiente, describiendo la metodoloola utilizada en cada uno de ellos, se presentan los resultados de las simulaciones y el análisis de estos resultados.
Los resultados obtenidos son válidos sólo para los variaciones en los modelos y las perturbaciones presentadas en los experimentos, por lo que no se consideran resultados generales. Sin embargo, la metodologla empleada puede ser utilizada para el análisis de otro procesos.
+ I
P
3.1
Los modelos de los procesos que se presentan a continuación se utilizaron para desarrollar un controlador autosintonizable con base en los Sistemas Expertos. Para el prop6sito de este trabajo, los procesos se consideran adecuados por las caracterlsticas que presentan sus modelos, que se describen a continuaci6n.
Description de los procesos simulados
' \ -.
3.1.1 Tanques no interactuantes
El primer proceso simulado es un sistema de dos tanques no interactuantes. El nombre de no interactuantes se debe a que el primer tanque afecta al segundo. y &te no interactúa con el primero I61 1. La selecci6n de este proceso como caso de estudio se debe a las caracterlsticas dinámicas que presenta y a las posibles variaciones que Se pueden efectuar en los parámetros del modelo. Las caracterlsticas dinámicas que presenta son:
a l
b)
Es un proceso no lineal.
Las dinámicas que tienen los procesos de este tipo son lentas, comparadas con las de otros procesos, por ejemplo: presión O flujo.
Existen parámetros en el modelo a los que se les puede cambiar su valor. simulando variaciones en el proceso.
Los elementos del sistema de control, incluyendo al sensor y la válvula, tienen valores máximos-mínimos limitados por las condiciones físicas.
c)
e)
Algunas de las posibles variaciones que se pueden efectuar son:
a i
b)
Simular perturbaciones. por flujos externos.
Variar las ganancias y las constantes de tiempo de los diferentes elementos: válvula, motor, sensor.
35

,
Fl
I ú
Figura 3.2 Esquema del proceso.
Las ecuaciones diferenciales que rigen al proceso son: -
con:
Una descripción detallada de como se derivan las ecuaciones anteriores se presenta en 161,631.
Las ecuaciones 13.41 y (3.51 se utilizaron para simular el proceso de tanques. Estas ecuaciones sa resolvieron con al método de Runge Kuna de cuarto orden. El lenguaje de programación utilizado es Pascal. En el apéndice B se presenta el modelo linealizado para el proceso de tanques. El modelo linealizado sa utiliza s610 para comparar algunos resultados del módulo Presintonizador.
3.1.2 Turbogenerador
EL turbogenerador es una planta de producci6n de energla eléctrica con capacidad de generación de 5 MW; su sistema de control es de tipo mecánico-hidráulico. Se puede interconectar a una red eléctrica aislada o a un sistema eléctrico de potencia. El modelo matemático y su descripción se tom6 de i641.
La variable que se controla es la frecuencia del turbogenerador. Esta se mide y se compara con la referencia en el regulador de velocidad "Woodward". El error se transmite al regulador de la válvula piloto. La señal del relevador de velocidad se transmite al servomotor. El servomotor mueve la válvula mariposa que regula la alimentación de vapor al turbogenerador. Un 50% de apertura de la válvula mariposa corresponde a la máxima salida del turbogenerador. El turbogenerador es puesto en operación con un arrancador.
En este trabajo sólo se simuló la conexión a una red eléctrica aislada, sin considerar las operaciones de arranque y paro. Este modo de operación se seleccionó por la facilidad de simulaci6n de perturbaciones como:
37
3.2 Experimentos del m6dulo Presintonizador
Como se mencion6. la técnica para el m6dulo Presintonizador obtiene un punto del diagrama de Nyquist, a partir del cual se diseña el Controlador. El objetivo de los experimentos que se Presentan es deducir las reglas que se incluirán en la Base de Conocimientos y los valores necesarios para la Base de Datos que se utilizarán para su implementaci6n. Los experimentos se plantearon para resolver preountas como:
a) L Es posible que el proceso oscile 7 .
b)
- ,
L Qu6 valores son los apropiados para M y H cuando se desconocen las dindmicas del proceso 7
¿ Cuáles son los efectos de variar M y H en la respuesta del proceso .?
L C6mo y an cuanto variar M y H para encontrar el punto crltico i
c)
dl
e)
f)
- Cdmo daterminar. que se ha encontrado el punto crltico ?
Tiene ;n buen desempeño el controlador diseñado con esta técnica ante perturbaciones internas (cambios en los pardmetros del modelo) y externas 7
A continuaci6n se presenta los procedimientos desarrollados para responder a estas preguntas; los experimentos definen los detalles de los pasos SuceSiVOS para encontrar el punto crltico.
I ' . " . ' . l .
3.2.1
Cuando las dinámicas del proceso se desconocen y se va a utilizar el Presintonizador, como lo muestra la figura 2.5, se deben inicializar los pardmetros del relevador. Con las ecuaciones (2.20) y (2.21) se calculan M y H como función de a (magnitud de oscilaci6n) y M8 (margen de fase), respectivamente, sin especificar cuáles son los valores más apropiados.
;El valor de bras B, es el valor de la señal excitadora del proceso, que lo mantiene en el .punto de.operaci6n dado. Si este valor no es el adecuado, las oscilaciones pueden no ser simétricas respecto a la referencia. .Esto se debe a las no linealidades del modelo
Valores iniciales para M, H y E . ,::" . , I
". . del proceso, principalmente las de saturaci6n. . I I
Para lograr un funcionamiento satisfactorio del modelo del proceso. el margen de fase debe estar entre 30° y 60?,.[541. Para calcular H se selecciona el valor de 45' para Me como valor inicial. Para deducir el valor de a, se experimentó con diferentes Valores: 0.1, 2. 5, 10 y 20% del máximo .valor de la variable controlada. nivel en los tanques y frecuencia en el turbogenerador. f .
-!" 1
AI probar para los diferentes valores de a se encontr6 que valores pequeños no hacen oscilar al proceso. Por otro lado, valores grandes provocan inestabilidad o alejan al proceso del punto de operación. Los diferentes casos de oscilaci6n y no oscilaci6n encontrados son:
ai La señal excitadora del relevador (B+ M o &MI no logra que la señal de error
39
' I
PI
R I
LI
h .: ,. . ,
4 -
-11
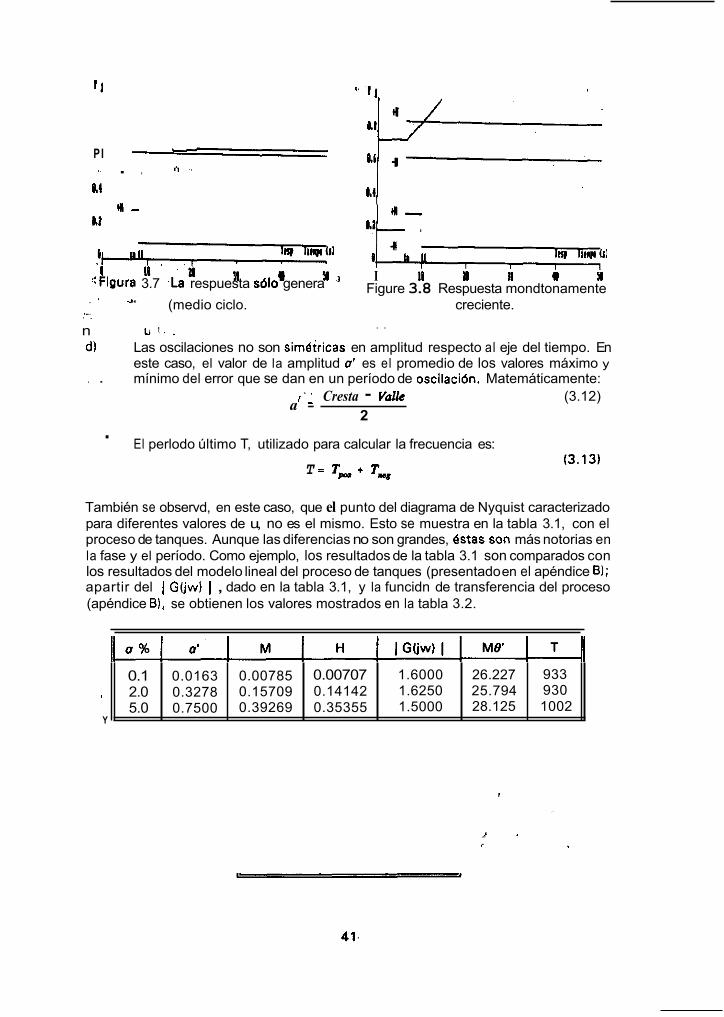
1 (I n I II m II (I n '1 ' 1 I " U <Figura 3.7 .La respuesta s610 genera .'
(medio ciclo. creciente. Figure 3.8 Respuesta mondtonamente
. ' ii.
1.'. . . n Li 1 . "
d)
. .
Las oscilaciones no son siméiricas en amplitud respecto al eje del tiempo. En este caso, el valor de la amplitud a' es el promedio de los valores máximo y mínimo del error que se dan en un período de oscilaci6n. Matemáticamente:
2 ,'- Cresta - Va& (3.12) a -
' Y
- El perlodo último T, utilizado para calcular la frecuencia es: (3.13)
T = T- + T,
0.1 0.0163 0.00785 0.00707 1.6000 26.227 933 2.0 0.3278 0.15709 0.14142 1.6250 25.794 930 5.0 0.7500 0.39269 0.35355 1.5000 28.125 1002
También se observd, en este caso, que el punto del diagrama de Nyquist caracterizado para diferentes valores de u, no es el mismo. Esto se muestra en la tabla 3.1, con el proceso de tanques. Aunque las diferencias no son grandes, Bstas son más notorias en la fase y el período. Como ejemplo, los resultados de la tabla 3.1 son comparados con los resultados del modelo lineal del proceso de tanques (presentado en el apéndice E); apartir del I G(jw) I , dado en la tabla 3.1, y la funcidn de transferencia del proceso (apéndice E), se obtienen los valores mostrados en la tabla 3.2.

Tabla 3.4 Variaciones de M para H -0.35355 y h, =5.
Tabla 3.5 Variaciones de M para H=0.35355 y h,=8.
M
0.1570 0.3926 0.7853
o' T M.9 MB' I Giiw) I 5.0707 1.0141 2150.0 44.205
1.1531 1665.0 37.820 2.3064 1.1478 1635.0 38.028 45.000 1.1478
2
Tabla 3.6 Variaciones de M para H=0.70710 y h,=8.
0.0070 0.1414 0.3535 0.7071
0.0324 325.0 12.584 45.000 0.1622 0.2770 970.0 30.693 45.000 1.3852 0.5668 1410.0 38.587 45.000 2.8342 0.9696 1890.0 46.822 45.000 4.8482
0.0070 0.1414 0.3535 0.7071
43
0.0430 270.0 9.463 45.000 0.0860 0.3268 750.0 25.641 45.000 0.6536 0.6525 1075.0 32.806 45.000 1.3051 l . lW5 1420.0 39.356 45.000 2.2302
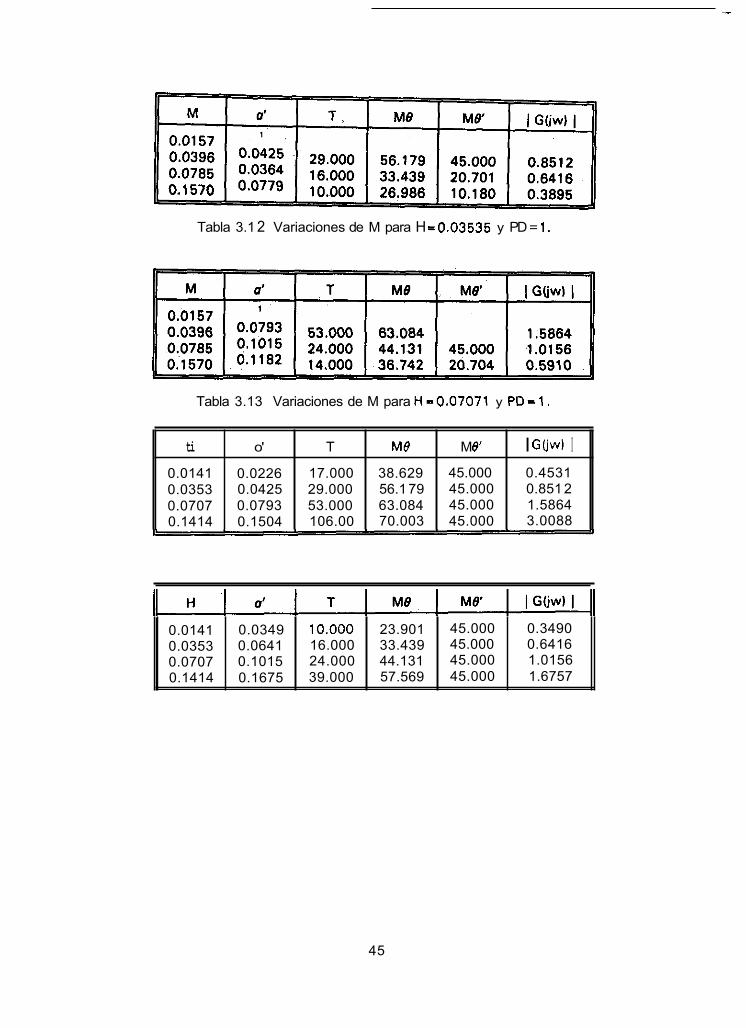
Tabla 3.1 2 Variaciones de M para H =0.03535 y PD = 1.
ti
0.0141 0.0353 0.0707 0.1414
Tabla 3.13 Variaciones de M para H=0.07071 y PD=l .
o' T MO M 6' I Güwl I 0.0226 17.000 38.629 45.000 0.4531 0.0425 29.000 56.1 79 45.000 0.851 2 0.0793 53.000 63.084 45.000 1.5864 0.1504 106.00 70.003 45.000 3.0088
0.0141 0.0353 0.0707 0.1414
0.0349 10,000 23.901 45.000 0.3490 0.0641 16.000 33.439 45.000 0.6416 0.1015 24.000 44.131 45.000 1.0156 0.1675 39.000 57.569 45.000 1.6757
45
Puesto que en ambos casos las acciones de variar M o H tienen el mismo efecto sobre el perlodo y la fase, tomar alguna decisión sobre qu4 valor variar depende de los límites que tengan estos Pardmetros. por ejemplo, M debe calcularse para u' máxima de 5%.
caso II
Considerando que I GUw) I es mayor que la unidad, se establecen las posibles acciones para lograr que I GUwi I tienda a la unidad.
ai Los datos de las tablas 3.3. 3.4, 3.5 y 3.6 sugieren aumentar M, disminuyendo la fase y el perlodo de oscilacibn y aumentando la amplitud.
b) Los datos de las tablas 3.7, 3.8, 3.9 y 3.10 sugieren disminuir H , , disminuyendo la fase, el perlodo y la amplitud.
En este caso, al igual que el primero, tomar alguna decisi6n sobre qué valor variar, entre M y H, depende de los llmites que tengan estos pardmetros, por ejemplo: H está limitado a un mlnimo dado por la ecuaci6n (3.15).
En este caso la magnitud del proceso es igual a la unidad. Para esta magnitud, se obtiene el margen de fase del proceso. Encontrar la frecuencia de oscilaci6n y el margen de fase para la magnitud del proceso igual a la unidad es una de las metas del Presintonizador.
Antes de dar por terminada la búsqueda del punto crltico, debe revisar que MO y T converjan a un valor. Si esto es cierto se diseña el controlador; en caso contrario se hace una correcci6n promediando los valores obtenidos para estos valores.
r
3.2.3.2 Para el proceso del turbogeneredor
Caso I
Considerando que 1 G(jw) I es menor que la unidad, se establecen las posibles acciones Dara lograr que 1 G(jw) I tienda a la unidad.
ai,. ? ,
Las tablas 3.11, 3.12.y 3.13 sugiere disminuir M, aumentando la fase y el perlodo de oscilaci6n y disminuyendo la amplitud.
Esta acci6n llevaría al punto crltico, pero una fuerte disminuci6n 811 M provocarla que el proceso.no oscile. ,Esto hace pensar que posiblemente el punto crítico est6 entre los valores últimos que hicieron oscilar al proceso y los
, . que no lo hacen oscilar. Esta acci6n no'sucede en el proceso de tanques. . . - . \ -, 4,'
bl, Las tablas 3.14 y 3.15 sugieren aumentar H, aumentando la fase, el período . y la amplitud. -r : : . . -
En estas opciones el efecto sobre la amplitud de oscilaci6n (0'1 varía dependiendo de qu4 parámetro se modifique; variar M la disminuye y H la aumenta. L,..
47

. . - ,., . Condici6n Acci6n t Efectos
. 0.652 M=,,-20 0.654 .-32.,814 . 26.794. 1070 0.81 5
a'. ..~. Mü . M9 . . - T I Gíiw) I (%) I Gíiw) I
MTy20,", 0.652 32.808 33.533:; , " lo75 .'1.019 . . . .. .r ,. ' 0.815
1.019

Tabla 3.21 Acci6n de disminuir M. - En esta tabla a8 observa que una fuerte disminuci6n en M, del 40%. hace que el proceso no oscile. El rengIcín'3, muestra que 1 Güwi I no aümenta para valores menores de M, sino que permanece fijo; no asi la fase y el perlodo. Esta resultado se atribuye a las no linaalidades qua existen en al modelo del turbogenerador.
Cuando se varia M, cambia el valor da a, esto es debido a que la ecuaci6n 12.201 siempre debe ser igual a la unidad; si esto n o se cumple, no se encuentra el punto crltico. De esta manera, a debe cambiar: ' . .
4 M (3.16) a - - r n . * *
Variando a tambi6n se varla el margen de fase deseado y el nuevo valor se calcula con la ecuacidn (2.21). Si se varla H, 6610 cambia el maroen de fase deseado. '
Tomando como condiciones iniciales los valores utilizados en la tabla ,*interior y aumentando H:
- - .
r "
1. I . >
i_
Tabla 3.22 Acci6n de aumentar H. , o I .
De los resultados de la sección 3.2.2 se concluye qué:
a) . El pardmetro que se variará es aquel que disminuye la magnitud de oscilación. Con esto se logra que los valores obtenidos sean los mds cercanos a los del punto de operaci6n. Sin embargo, al disminuir algún pardmetro del relevador es posible que el proceso deje de oscilar;por lo que se debe tener un llmite
, I i . 'El COIID no -4..
1 . < *
P". .I sblsulo d . 1 cmnrO(.1<x<
51

controladores diseñados para un punto de operacidn de 8 metros
3.22 0.979 8.81 2.202 11.98 17.00 4.25 Turboge nerador
" .
Controlador Cambio de MP 6
K = 0.907 +10 % 0.0459 0.6911 ti = 371.73 +20 % 0.0716 0.6427 td = 92.934 . -10 % 0.0519 0.6853
-20 % 0,1111 0.5730
K = 0.992 +10 % 0.0178 0.7885 ti = 480.72 +20 % 0.0397 0.7162 td = 129.18 -10 % 0.0175 0.7897
' -20 % 0.0526 0.6839
Referencia t S
(seo)
834 1422 695 1030
814 1268 722 1114
53
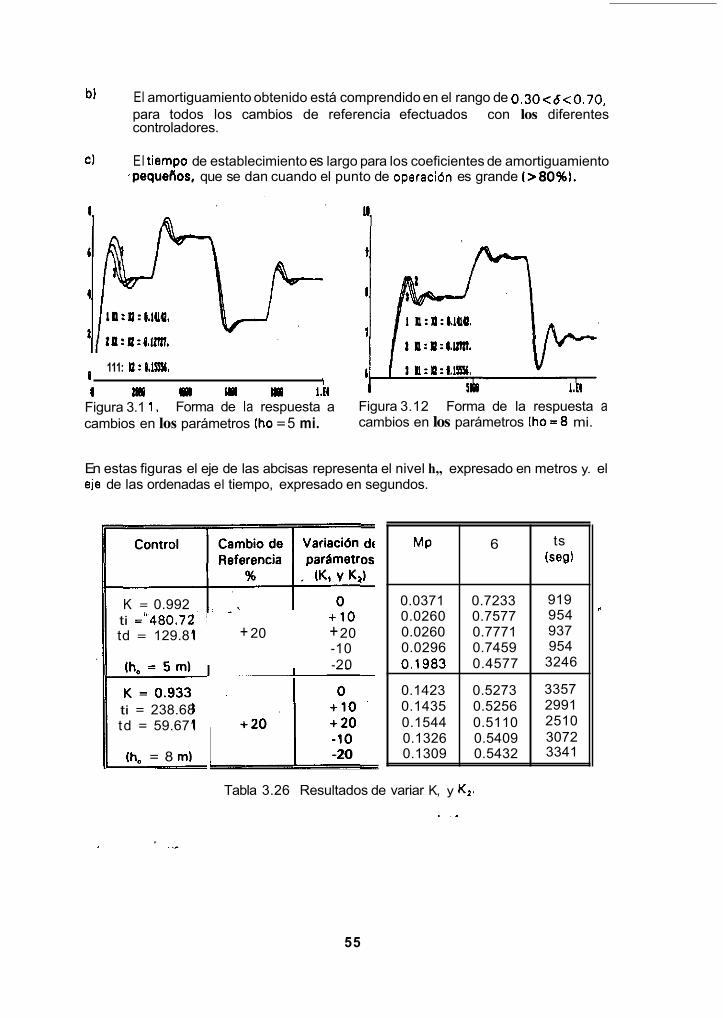
bi El amortiguamiento obtenido está comprendido en el rango de 0.30<6<0.70, para todos los cambios de referencia efectuados con los diferentes controladores.
El tiampo de establecimiento es largo para los coeficientes de amortiguamiento qmquefios. que se dan cuando el punto de oparacidn es grande (>8O%i.
ci
MP 6
0.0371 0.7233 0.0260 0.7577 0.0260 0.7771 0.0296 0.7459 0.1983 0.4577
0.1423 0.5273 0.1435 0.5256 0.1544 0.5110 0.1326 0.5409 0.1309 0.5432
111: 11: i.im. I I Em PI u 01 1.H
Figura 3.1 1. Forma de la respuesta a cambios en los parámetros iho = 5 mi.
I
ts (sea)
919 954 937 954 3246
3357 2991 2510 3072 3341
Figura 3.12 Forma de la respuesta a cambios en los parámetros lho=8 mi.
En estas figuras el eje de las abcisas representa el nivel h,, expresado en metros y. el eje de las ordenadas el tiempo, expresado en segundos.
K = 0.992 ti =“480.72 td = 129.81
ti = 238.68 td = 59.671
Ih. = 8 mi
+10 + 20 + 20
-10 -20 & -20
Tabla 3.26 Resultados de variar K, y K,. . _
55
h)
i)'
Se regresa al incis0 la). probando las modificaciones del paso anterior, ,. ; . ,
se repiten ~os'pasos anteriores operando al proceso en una referencia diferente , O se termina el procedimiento. .
los pasos b-f se repitieron;: en promedio. 1 O veces 'para'cada conjunto de reglas. A continuacidn se presentan algunas conjuntos de reglas y sus resultados.
. . . . ' .a. ". mrrx'#' ,,:' .
3.3.1 Simulaciones en el turbogeneridor , . A ,, i r , . . . . .
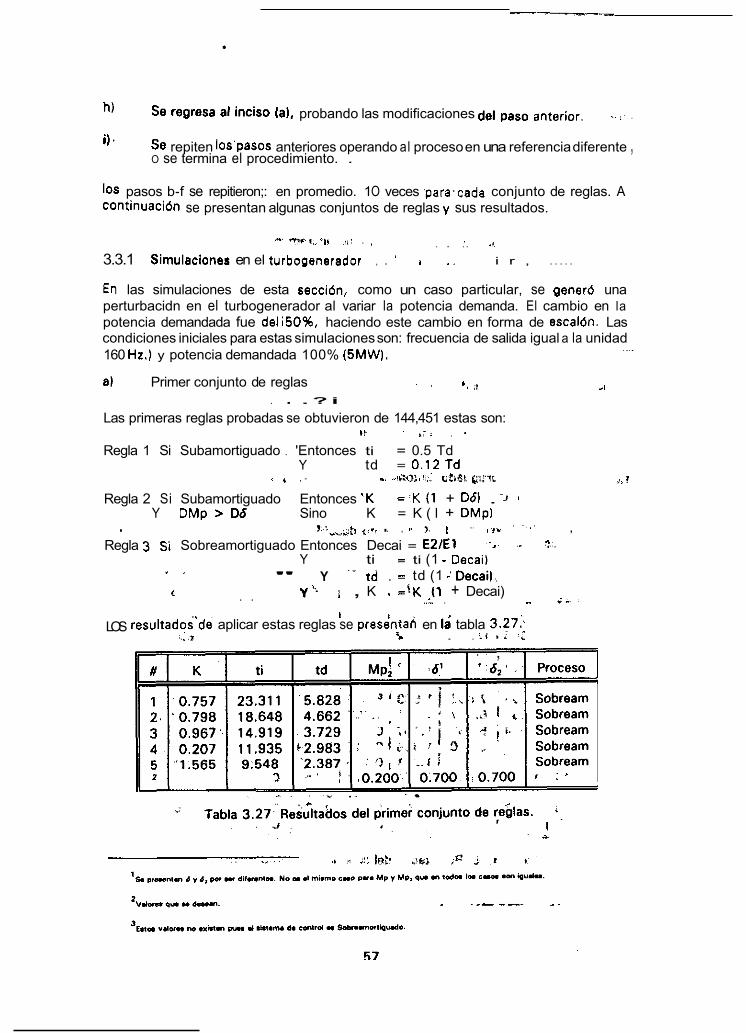
i n las simulaciones de esta seccibn, como un caso particular, se generd una perturbacidn en el turbogenerador al variar la potencia demanda. El cambio en la potencia demandada fue deli50%, haciendo este cambio en forma de escaldn. Las condiciones iniciales para estas simulaciones son: frecuencia de salida igual a la unidad 160 Hz.) y potencia demandada 100% (5MW).
a) Primer conjunto de reglas . ,
Las primeras reglas probadas se obtuvieron de 144,451 estas son:
Regla 1 Si Subamortiguado . 'Entonces ti = 0.5 Td
..
*' ,I .\
. . . ? i
. . I k > / . I
td = 0.12Td i; ?
Y
Regla 2 Si Subamortiguado Entonces 'K =:K (1 + D6) . 1 < , , - ., ,. r ,,>o:,o;: * i,:,nt tux
Y DMp > Dd Sino K = K ( l + DMpl . ,-*b t:?, I. , I I >, - ,',' , Regla 3 Si Sobreamortiguado Entonces Decai = E2/E1 '.a. .:.'
Y ti = ti (1 - Decai) " Y .= td , = td (1 : Decai),<
< y'. j , K I =!K j l + Decai) . .
. " i r . . .
LOS I
resultados.de aplicar estas reglas se presdntan en la tabla 3.27:; 8.. .I !. . . I I I : 'L
- *
--
Observaciones:
il Se logra que el sistema de tontroi tenga ei ~p especificado.
La variaci6n .de lOS-PardmetrOS es mlnima, para el p&so de convergencia de Mid.
I I < , C'
ii) I
I &
<. t : \ ; . ' J $ I :. L ., I , I , . . , i ' . i . NO se cumplen las relaciones tint 0.5 y tdn '= 0.12.':
subamortiguado. . , , , . '4 .+' i -
i i i l
iv)
I " - I _ > . b , , .. .., 5 ' < "
No se lleva rápidamente ai: sistema de 'control d i sobreamortiguado a . - . . I . . . . . . . . . . .
I I '. *-. , .
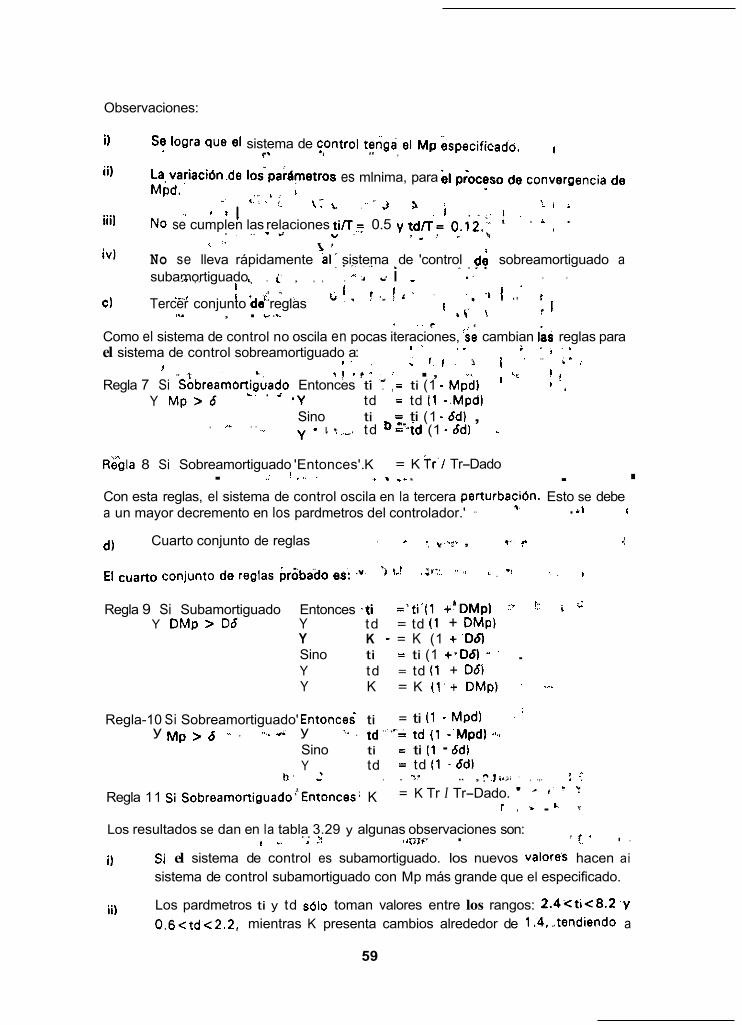
._.< I i : - , r , , . ! . " ! d . ' ' ; t L r ,.. , . * ,,. ' a \ ' I I1 C) Tercer conjunto he reglas
Como el sistema de control no oscila en pocas iteraciones, se cambian i s reglas para el sistema de control sobreamortiguado a:
I . . ?
I ' , . i . < . , , ' . : f . 1 . 1 I ' - b , ' +
* 1 . , . ; : . , . . I 1 I
Regla 7 Si "Shbreamortig'uado Entonces ti . ,= ti (1 - Mpd) I '' 1 .
- Y td .= td (1 -.Mpd) Sino ti = ti (1 -6d l , y - t : . . - . td bE'.¡d (1 - ód)
-. . I Y M p > 6
, ,. . .
Regla 8 Si Sobreamortiguado 'Entonces'. K
Con esta reglas, el sistema de control oscila en la tercera perturbaci6n. Esto se debe a un mayor decremento en los pardmetros del controlador.' -
d)
= K T r l Tr-Dado .: I . , . , . . . * (. _.* .
. r l I 1,
Cuarto conjunto de reglas ' * ., '".+'8' , Y ' c d
El conjunto de reglas pr&s&, es': - Y ' ' b 1-f ,:"T. " '' Y . - $ ' . t
Regla 9 Si Subamortiguado Entonces .ti = ' t i ' ( l +"'DMpI :.- c' i Y DMp > D6 Y td = td (1 + DMPI
Y K - = K (1 + ' D a Sino ti = ti (1 +.Dd ' . Y td = td (1 + Dd) Y K = K ( 1 ' + DMp) .'.
Regla-10 Si Sobreamortiguado' EntonceS ti = ti (1 - Mpdl . ~
y M~ > 6 ~ , )... &' y '.. . td'"''= td (1 -'Mpd) .,., Sino ti = ti (1 - 6d) Y
t l . 2 td = td (1 - 6dl
' .. , ?ti ,>; ' , .,. : -: = K Tr I Tr-Dado. ' ' 1 ' ' 'I
r~ , % . b. .I
. : E ' I .
Si el sistema de control es subamortiguado. los nuevos valore% hacen ai sistema de control subamortiguado con Mp más grande que el especificado.
Los pardmetros ti y td S610 toman valores entre los rangos: 2.4.<ti<8.2'y 0.6<td<2.2, mientras K presenta cambios alrededor de lA..tendiendo a
- 1 . . ,.
Regla 11 Si Sobreamoniguado'EntoncesL K
Los resultados se dan en la tabla 3.29 y algunas observaciones son:
i)
. . 8iGTr' ." " .. I . .
iil
59

Regla 14 Si Sobreamortiguado Entonces ti = ti (1 - Mpd) Y Tr > = Tr-Dado Y td = td (1 - Mpdl Y Mpd > bd
#
1 2 3 4 5 6 I
Regla 15 Si Sobreamortiguado Entonces ti = ti (1 - bd) Y Tr > = Tr-Dado ' Y td . = td (1 -bd l Y Mpd < bd
~ ~~
U ti td MP2
0.757 23.311 5.828 2.271 6.993 1.748 0.050 1.930 12.000 3.000 2.896 3.600 0.900 0.163 2.896 10.000 2.500 2.172 7.500 1.875
0.200
Regla
Regla
6 Si Sobreamortiguado Entonces K Y Tr > = Tr-Dado
= K Tr / Tr-Dado
~ .,. 7 SI Sobreamortiguado Entonces ti = 0.75 ti Y Tr c Tr-Dado Y td = 0.75 td
Y K = 0.75 K
En este conjunto de reglas se incluyen dos factores heurlsticos en la primera regla, con el fin de que los valores de ti y td cumplan las relaciones tiK y t d K dentro de cieno margen. Ademas. el valor de K no se varla si el Mp alcanzado esta dentro del rango de i20% del valor especificado. Estas restricciones hacen que las variaciones de los parametros se detengan, sin necesidad de una intervenci~in externa. Un resultado de aplicar este conjunto de reglas esta en la tabla 3.30. -
6 - - 0.071
0.168
0.700 -
Sobream
Sobream
Sobream Sobream
Tabla 3.30 Resultados del conjunto de reglas con!actores heurlsticos para ti y td
Los resultados son similares a los de la tabla 3.29, salvo que aqul la variación de los parametros es más fuerte y la respuesta del sistema de control cambia de '
subamortiguado a sobreamortiguado en s610 una iteración.
fl Sexto conjunto de reglas
El conjunto de reglas siguiente considera las relaciones tiK y tdK, aún cuando el sistema de control es sobreamortiguado, para que estos estén alrededor del valor que cumpla dichas relaciones. En este conjunto se reglas se numeran reglas utilizadas anteriormente.
_" Regla 12. f
Regla 13.
61

--
K ti td Mp, 6 6,
1 0.757 23.311 5.828 2 0.567 17.483 4.371 0.11'3 0.124 0.568 3 0.541 6.258 1.564 0.488 0.447 0.247 4 0.697 14.798 3.699 0.074 0.092 0.638 5 0.637 14.798 3.699 0.105 0.117 0.582 6 0.601 14.798 3.699 0.128 0.128 0.547 7 0.582 14.798 3.699 0.142 0.142 0.527 8 0.582 14.798 3.699 0.142 0.142 0.527 1 . ' 0.160 0.600 0.600 -~
detengan en algún valor, como lo hacen el sexto conjunto de reglas.
Q) Séptimo conjunto de reglas
Proceso
Sobream Subamor Subamor Subamor Subamor Subamor Subamor Subamor
I
v.lwnd.rmda. *..
63

3.3.2 Simulaciones en los tanques
En las simulaciones de esta seccibn, como un caso particular, se llevb al sistema de control a un punto de operacibn de h,, =h,,-5. e partir de un nivel cero en ambos tanques, es decir, a partir de condiciones iniciales cero,
Se probb el s4ptimo conjunto de reglas generado utilizando el turbogenerador, para el proceso de tanques. Los resultados sa muestran en la tabla 3.35.
# U ti td Mp, 6 6, Proceso
- K
0.906 1.635 1.226 1.904 2.368 2.140 2.140 2.140 2.140
-
-
1 2 3 4
7
- ti
376.18 376.1 8 282.13 215.20 260.66 262.58 258.06 256.00 256.75
- -
-
0.757 23.31 5.82 1.048 0.321 0.033 Subamor 1.477 337.51 84.37 0.289 0.063 0.352 Subamor 1.693 337.51 84.37 0.115 0.027 0.556 Subamor 1.628 337.51 84.37 0.167 0.038 0.482 Subamor 1.628 377.18 94.04 0.167 0.038 0.482 Subamor
0.160 0.600 0.600
- td - -
94.04 94.04 70.53 53.80 65.16 65.64 64.51 64.00 64.00 - -
3E3
MP2
0.910
0.672 0.381 0.060 0.133 0.151 O. 159 0.159 0.160
- -
-
eEl
6
0.182
0.162 o. 1 O0 0.022 0.038 0.042 0.044 0.044 0.600
- -
-
- 4 - 0.01 1
O. 107 0.277 0.658 0.528 0.503 0.492 0.492 0.600 -
Proceso
Subamor Sobream Subamor Subamor Subamor Subamor Subamor Subamor Subamor
-
Tabla 3.35 Resultados del conjunto de reglas utilizadas en las tablas 3.32. 3.33 y 3.34.,
I ' La tabla 3.36 muestra los resultados de utilizar un controlador diferente al de la tabla 3.35 y el mismo conjunto de reglas, para los mismos valores deseados.
65
376.18 94.04 0.910 0.182 0.011 Subamor 376.18 94.04 Sobream 282.13 70.53 0.672 0.162 0.107 Subamor 452.81 113.2 0.078 0.021 0.620 Subamor 62.71 15.67 0.914 0.275 0.010 Subamor 515.20 J, Sobream 128.8 386.40 96.60 0.294 0.064 0.347 Subamor 116.30 29.07 0.768 0.222 0.065 Subamor 494.93 123.7 1 Sobream 371.20 92.80 0.235 0.052 0.404 Subamor 371.20 92.80 0.116 0.030 0.554 Cubamor 371.20 92.80 0.168 0.040 0.481 Subamor
1
3 4 5 6: 7 8 9 10 1 1 12 13 14 .l,5
82
.. 10.160 10.600 I 0.600 ~ I JI
'5.000 '1000.0 500.0
2.812 562.50 2812 2.109 421.87 210.9 0.260 0.057 0.380
,3.750 ,750.00 375.0 .! r t e . , :: ,? - ,_
2;352 ~32.68, 8.17 0.845 0.250 ,0.600 3.070 520.00 130.2 .. ~ , ' .i 2.302 390.61 97.65 1.726 292.96 73.24 0.235 0.059 0.404 1.410 442.03 110.5 -0.104 0.027 0.573, .1.341, 78.06 19.51 0.900 0.266 0.016. 1.799 508.89 127.4 - : 1.349 381.67 95.41 0.235 0.064 0.343 1.561 381.67, 95.41 0.116 0.024 0.592 1.465 381.67 95.41 0.180 0.042 0.466 .1..465 381.67 95.41: 0.180 0.042 0.466
0.160 0.600 0.600
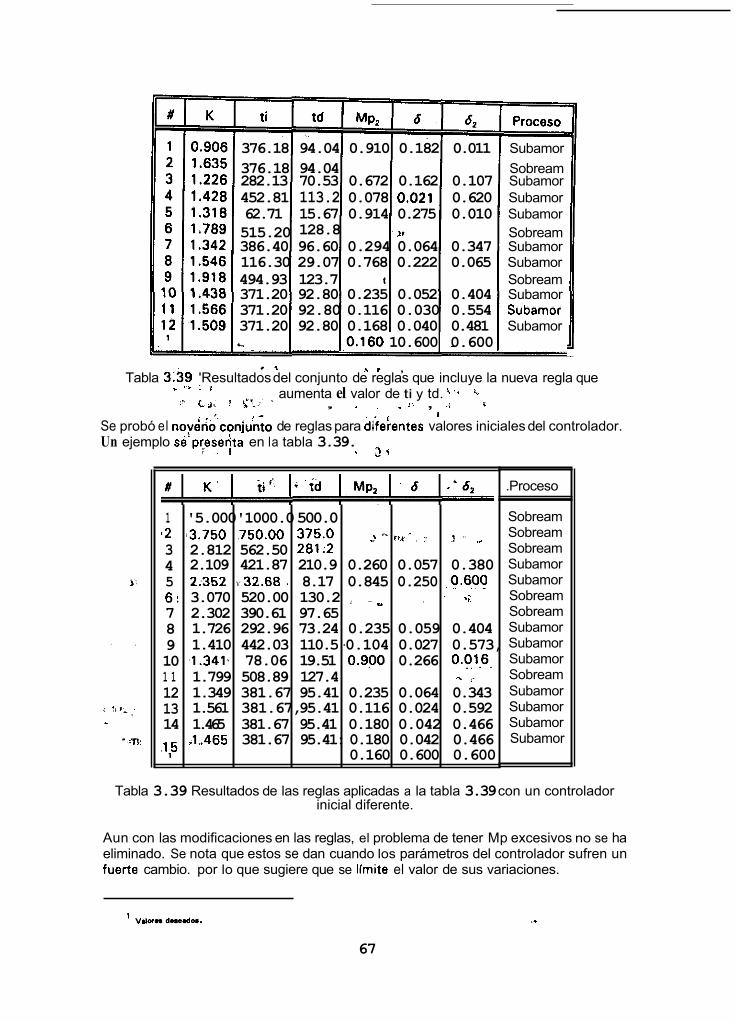
~ . l t , . * Tabla 3:39 'Resultados del conjunto de reglas que incluye la nueva regla que
Se probó el novc%oconjuGo de reglas para diidentes valores iniciales del controlador.
I '.I :.. i aumenta el valor de ti y td. ' I h , 1. , .9 i :. ~ (+ I , , r '.
I
Un ejemplo sepresenta en la tabla 3.39. , I I 2 ,
.Proceso
Sobream Sobream Sobream Subamor Subamor Sobream Sobream Subamor Subamor Subamor Sobream Subamor Subamor Subamor Subamor
Tabla 3.39 Resultados de las reglas aplicadas a la tabla 3.39 con un controlador inicial diferente.
Aun con las modificaciones en las reglas, el problema de tener Mp excesivos no se ha eliminado. Se nota que estos se dan cuando los parámetros del controlador sufren un fuerte cambio. por lo que sugiere que se límite el valor de sus variaciones.
67
3.4 EXPerhentOS del módulo Supervisor " - L
€1 m6dulo supervisor tiene como objetivo obtener la información del Sistema de Control Para We el sistema Experto defina cuál es el estado funcional de Bste.'En estos experimentos. se busca definir comportamiento de B ( k ) , variando el ndmero de datos a promediar N y el valor de umbral w, (ver capitulo 2J. También, se busca definir el nírmero de valores de Bíki a interpolar L, para que la recta obtenida con los L valores; Proporcione informacidn correcta del estado funcional del sistema.
Los ejemplos que se presenta se desarrollaron simulando un cambio en la potencia demandada en el turbogenerador. Estos cambios están representados en la figura 3.13b y 3.15b.
% P *- a ._
I I L I
3.4.1 . Seleccibn de valores de prueba pera 1 y N I ,r De las figuras 2.13, se deduce que para establecer el valor de L se debe tomar en cuenta el tiempo en que se tendrán los L valores de elk). Supdngase que el tiempo en que se obtiene los L valores de Uk) es igual al de un perlodo, la pendiente de la recta de ajuste serla negativa en los casos 2.13a. b, d y e'; sin embargo los casos 2 . 1 3 ~ y f tendría pendiente positiva. Por otro lado, si el tiempo para obtener los L valores de B(k) es de un perlodo y medio, la pendiente de la recta de ajuste sería negativa en los casos 2.1 3a. b y e y positiva en los casos 2.13~. d y f. Estos son los signos reales de la pendiente, por lo que se establece que el valor para L está dado por la regla heurística: - , . "
3 T ' L h = - 2
(3.171 -
1. , '
Se ve, en esta ecuaci6n. que el valor de L es funcidn del'perlodo de muestreo, que a su vez es función del perlodo de oscilación. :) I : ., ,I:, ' . . .
En los' siguientes experimentos se utilizó la ecuación (2.131 para definir el perlodo de muestreo (los valores utilizados son: 0.1, 0.2, .y 0.5). Se utilizaron tres valores de prueba para L que son: 95,.47 y 18; Esto con e1;fin de observar la tendencia de B(k) cuando se varla el perlodo de muestreo y. consecuentemente, el número de los datos a interpolar.
Como se ha mencionado, la.ecuaci6~(2.49) actúa como un rectificador y un filtro. Las caracterlsticas del filtro las define el valor de N; valores pequeños harán que el filtro sea un pasa todo y valores grandes harán que el filtro sea un pasa bajas. Para definir el valor apropiado de N se hicieron repetidas simulaciones con valores de N en funcidn de L. Tres fueron los valores probados:
I..*? 7 ' I . a , . ' t i * , . ~ . I . , 1 ri <, . . . %.
1 ! ,
" . --- donde P = 5,
/ ri
Con los valores de L y "así definidos se investigó el comportamiento de Bik) Para perturbaciones internas y externas en los sistemas de control simulados. En los
. I VJ
.,... L. > , t . ,, -',, t x . . , ' f" Io. caw. I I d v a i d a a k.c. qwl .I I m p 0 d. -. T r p .
69
II
L
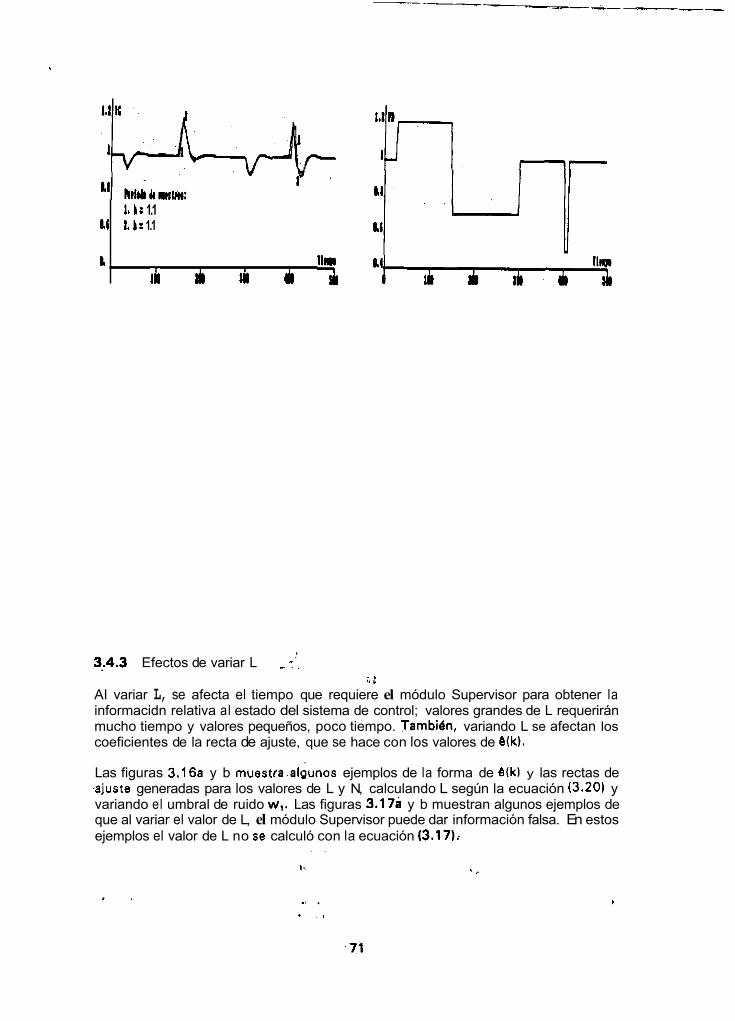
3:4.3 Efectos de variar L I 7'.
AI variar L, se afecta el tiempo que requiere el módulo Supervisor para obtener la informacidn relativa al estado del sistema de control; valores grandes de L requerirán mucho tiempo y valores pequeños, poco tiempo. Tambidn, variando L se afectan los coeficientes de la recta de ajuste, que se hace con los valores de Bik).
Las figuras 3.16a y b muestra.algunos ejemplos de la forma de B(kl y las rectas de .ajuste generadas para los valores de L y N, calculando L según la ecuación (3.20) y variando el umbral de ruido w,. Las figuras 3.17a y b muestran algunos ejemplos de que al variar el valor de L, el módulo Supervisor puede dar información falsa. En estos ejemplos el valor de L no se calculó con la ecuación (3.17);
i i
. .
I , 1..
1 6 L: 1.1 I. I: 1.1
ill di iii I
.: . , . . ,

e) Los valores de Bik) que sean cero no deben tomarse en cuenta, puesto que para esos valores el sistema está en un estado estable
De los resultados de las secciones 3.4.2 y 3.4.3 se establece, como regla heurística, que la relación entre L y N lecuación 3.21) debe estar entre 5 y 10, es decir:
(3.19) - . 5 - 1 0 L N
Valores más grandes que está relación hacen que el valor de Blkl tenga una dinámica muy rápida y valores pequeños que sea muy lenta.
Además, el valor de w, debe limitarse a un máximo de 5% del rango de la variable controlada. Con esta restricción se evitan que existan perturbaciones de magnitudes similares sin aue sean detectadas.
73
nor. d. Conoclml.nla8 Primer NIval
Anallib da Inlormoclón y w p i n b l 6 n d. los módulos
Bore d. Dolos PrnS..O 1mqu.s Turbogenerador (Toblai dal cap. 2)
' ,. * - ;
I I
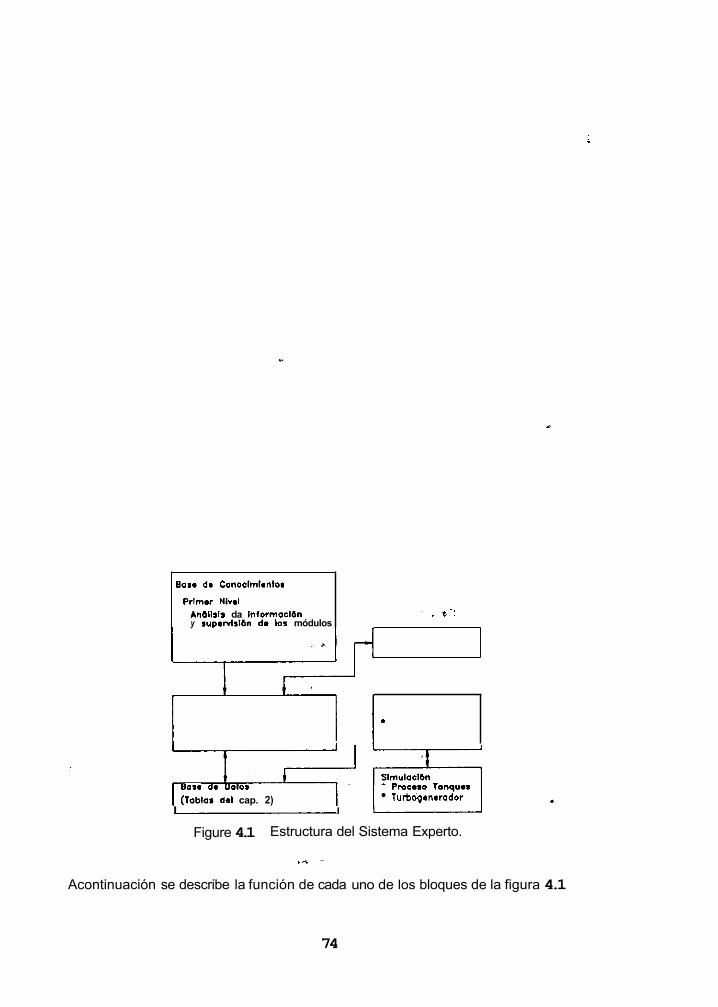
Figure 4.1 Estructura del Sistema Experto.
-
Acontinuación se describe la función de cada uno de los bloques de la figura 4.1
74
'U
' /
Sintonizador
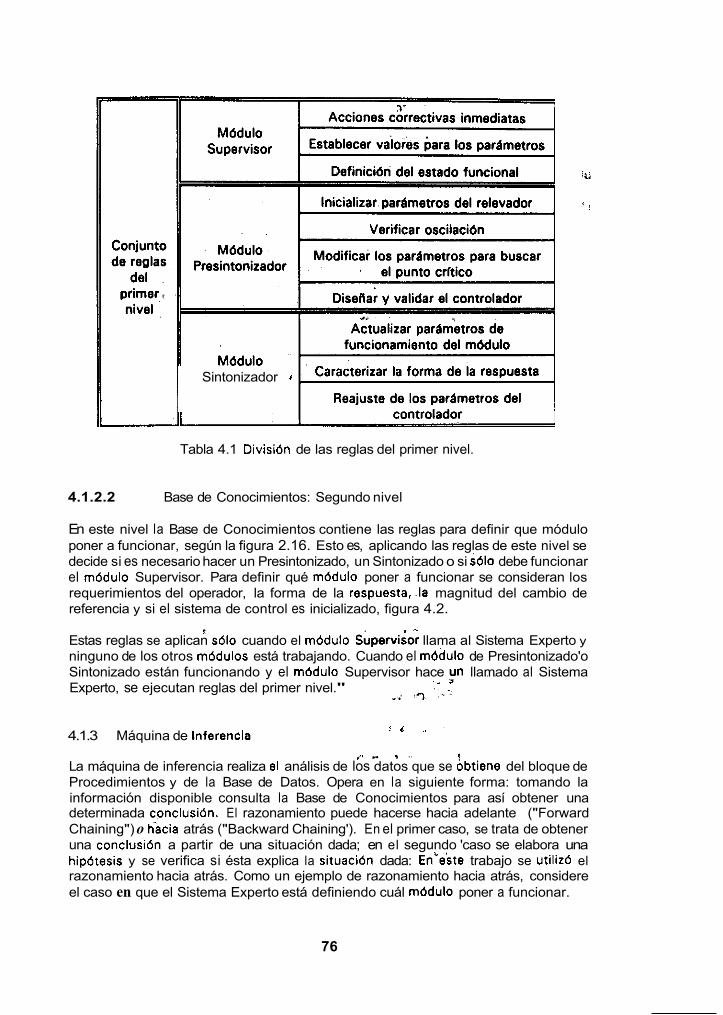
Tabla 4.1 Divisi6n de las reglas del primer nivel.
4.1.2.2
En este nivel la Base de Conocimientos contiene las reglas para definir que módulo poner a funcionar, según la figura 2.16. Esto es, aplicando las reglas de este nivel se decide si es necesario hacer un Presintonizado, un Sintonizado o si 5610 debe funcionar el m6dulo Supervisor. Para definir qué m6dulo poner a funcionar se consideran los requerimientos del operador, la forma de la respuesta,.la magnitud del cambio de referencia y si el sistema de control es inicializado, figura 4.2.
Estas reglas se aplican s610 cuando el m6dulo Supervi;oi llama al Sistema Experto y ninguno de los otros m6dulos está trabajando. Cuando el m6dulo de Presintonizado'o Sintonizado están funcionando y el m6dulo Supervisor hace ,un llamado . . al Sistema
Base de Conocimientos: Segundo nivel
I
.. , Experto, se ejecutan reglas del primer nivel." _'
$ 4 ., ' 4.1.3 Máquina de Inferencia
La máquina de inferencia realiza e1 análisis de los datos que se Obtiene del bloque de Procedimientos y de la Base de Datos. Opera en la siguiente forma: tomando la información disponible consulta la Base de Conocimientos para así obtener una determinada cpnclusi6n. El razonamiento puede hacerse hacia adelante ("Forward Chaining") o hacia atrás ("Backward Chaining'). En el primer caso, se trata de obtener una conclusi6n a partir de una situación dada; en el segundo 'caso se elabora una hipdtesis y se verifica si ésta explica la situaci6n dada: Enie'ste trabajo se utiliz6 el razonamiento hacia atrás. Como un ejemplo de razonamiento hacia atrás, considere el caso en que el Sistema Experto está definiendo cuál m6dulo poner a funcionar.
,'. ,. * -
76
-",
7 ' . 0.25 0.25
mol0 malo meio malo buano buena malo d.,.ado d.s.od<
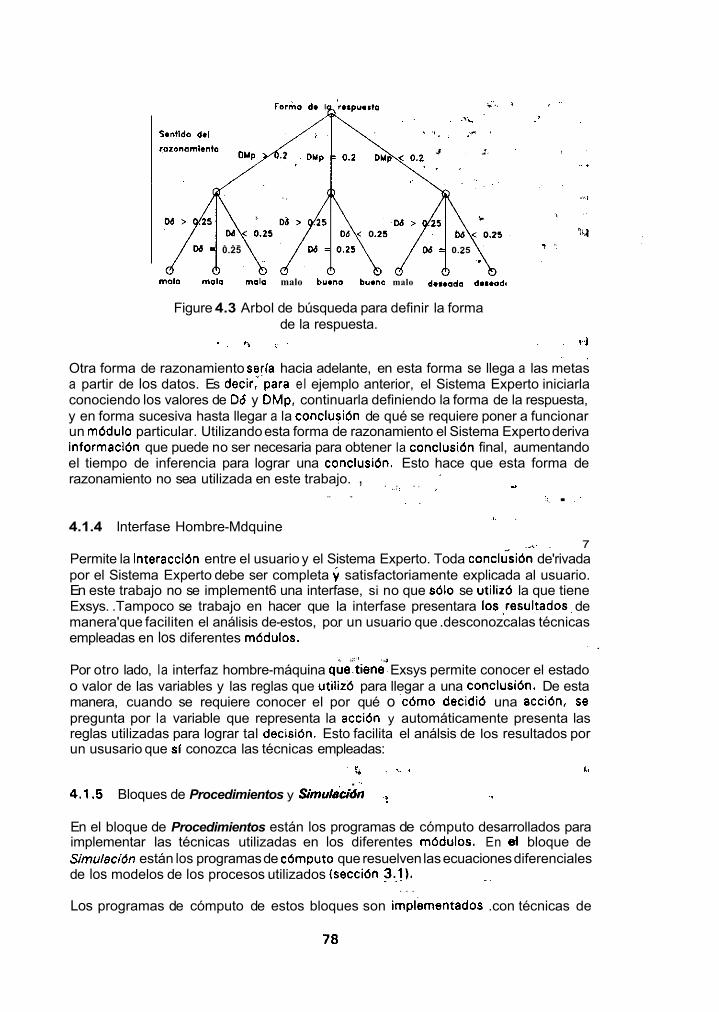
Figure 4.3 Arbol de búsqueda para definir la forma de la respuesta.
. , ,, j . . . VI
Otra forma de razonamiento serra hacia adelante, en esta forma se llega a las metas a partir de los datos. Es decir)'para el ejemplo anterior, el Sistema Experto iniciarla conociendo los valores de Db y DMp. continuarla definiendo la forma de la respuesta, y en forma sucesiva hasta llegar a la conclusi6n de qué se requiere poner a funcionar un m6dulo particular. Utilizando esta forma de razonamiento el Sistema Experto deriva informaci6n que puede no ser necesaria para obtener la conclusi6n final, aumentando el tiempo de inferencia para lograr una conclusi6n. Esto hace que esta forma de razonamiento no sea utilizada en este trabajo. ,
' ' "
L . , , : . . , ,' :., . : .. .
. . .,. .
4.1.4 lnterfase Hombre-Mdquine . _<. . 7
Permite la interacci6n entre el usuario y el Sistema Experto. Toda conclÚsi6n de'rivada por el Sistema Experto debe ser completa y satisfactoriamente explicada al usuario. En este trabajo no se implement6 una interfase, si no que s610 se utilizd la que tiene Exsys. .Tampoco se trabajo en hacer que la interfase presentara los,resultados. de manera'que faciliten el análisis de-estos, por . . un usuario que .desconozca las técnicas empleadas en los diferentes m6dulos.
Por otro lado, la interfaz hombre-máquina que'liene: Exsys permite conocer el estado o valor de las variables y las reglas que utilizO para llegar a una conclusi6n. De esta manera, cuando se requiere conocer el por qué o 'c6mo decidi6 una acci6n. se pregunta por la variable que representa la accidn y automáticamente presenta las reglas utilizadas para lograr tal decisi6n. Esto facilita el análsis de los resultados por un ususario que SI conozca las técnicas empleadas:
' 4 . .., L
, .
. '. 4.1.5 Bloques de Procedimientos y Simulecidn .? ..
En el bloque de Procedimientos están los programas de cómputo desarrollados para implementar las técnicas utilizadas en los diferentes mbdulos. En el bloque de Smulacidn están los programas de c6mputo que resuelven las ecuaciones diferenciales de los modelos de los procesos utilizados lsecci6n 3..1). ..
. . .
Los programas de cómputo de estos bloques son implementados .con técnicas de
70
f) Una vez que los programas de cdmputo han pasado información al Sistema Experto, ésta se analiza. Si se satisface la meta planteada, se ha terminado; si existe una anomalía el Sistema Experto indica que sdlo funcione el módulo de Supervisión. Si no existe una anomalía y no se ha alcanzado la meta, se repiten los pasos c, d y e.
El Sistema Experto no estd activo en todo momento, sino sólo cuando el módulo Supervisor le hace un llamado, al mismo tiempo que le pasa información del estado funcional del sistema de control. El Sistema Experto analiza la información y como resultado ejecuta acciones para corregir la situación que se presenta, indicando que funcione algún mbdulo.
4.3
Para ligar los programas de cómputo con el Sistema Experto se utilizó el comando de Exsys RUNO, que permite ejecutar un programa externo. Cuando se llama a un programa, se efectúan los pasos siguientes:
ai
Interacción de los programas de cdmputo y el Sistema Experto
En la línea de comandos se pasan algunos valores al programa que se va a ejecutar.
Se leen los valores de las variables (numéricas, alfanuméricas y booleanas) del programa que se va a ejecutar. Estos valores se encuentran en un archivo tipo texto previamente editado.
Se ejecuta el programa que se llamó.
Se almacenan los valores de las variables recientemente calculadas.
b)
C)
dl
e) Se repiten los pasos b, c y d hasta que una bandera se activa, indicando que se regresa el control al Sistema Experto.
f) Se genera un archivo tipo texto en el cual se pasa la información al Sistema Experto.
Se regresa el control a Exsys para el análisis de la información. g)
Esta forma de interactuar entre los programas de cdmputo y Exsys no es la más adecuada, por que requiere de estar abriendo y cerrando archivos. Sin embargo, para propósitos de investigación esta desventaja no afecta en los resultados.
80

Cepltulo 5
CONCLUSIONES
Se ha presentado un esquema para un sistema da control autosintonizable (de una entrada una salida) desarrollado con base en los Sistemas Expertos. El esquema consiste de tres módulos: el de Presintonización, el de Sintonización y el de Supervisión, que son coordinados por un Sistema Experto.
Los resultados de los experimentos en el módulo Presintonizador dieron algunos rangos para los valores de los parámetros del relevador lecuaciones 3.13, 3.14, 3.17, 3.1 8 y 3.1 91, y también establecieron un criterio de Cómo ajustar estos parametros para que el proceso oscile (sección 3.2.1) y encontrar el punto crítico (tablas 3.16 y 3.231 para el cual se diseña el controlador (acuaciones 2.25-2.29).
La técnica empleada en el módulo Presintonizador limita el uso de este sistema a aquellos procesos en los que es posible generar una oscilación. En el proceso de tanques es posible asta acción, no así en el turbogenerador. Sin embargo, como se menciond, en ambos casos se aplicó la técnica para probar su funcionamiento.
Un requerimiento para el funcionamiento de esta módulo, es que se deben inicializar los parámetros del relevador. El valor inicial de estos parametros se puede dar como función de a, sin que sea necesario conocer las características dinámicas del proceso. Este mínimo requerimiento de información, comparado con otros que tienen algunos sistemas de control, es una ventaja del módulo Presintonizador. Además, esta técnica se puede utilizar para extraer informacidn de las caracterlsticas dinámicas del proceso que se desea controlar. Con esta informacidn, es posible aplicar algoritmos de control más complejos que la acción de un PID.
En el modulo Presintonizador, el controlador se diseña para un punto del diagrama de Nyquist que representa el comportamiento del proceso. El diseñar el controlador para un punto especlfico limita a qua el controlador diseñado sea valido sdlo en la vecindad de ese punto; sin embargo, presenta la ventaja de no requerir la función de transferencia que represente el comportamiento dinámico del proceso. Los resultados de aplicar esta técnica muestran que el controlador diseñado es robusto, para las perturbaciones simuladas, en cuanto a que mantiene al proceso dentro de un rango de operación deseado. Las condiciones de diseño para el controlador utilizadas en este trabajo se pueden cambiar y obtener resultados diferentes. No fue motivo de trabajo en esta tesis encontrar cuáles son las condiciones de diseño más apropiadas para los procesos simulados.
Para el mddulo Sintonizador, se efectuaron pruebas que generaron un conjunto de reglas heurlsticas para reajustar los parámetros del controlador para forzar la forma de la respuesta del sistema de control a una forma de deseada. Estas reglas no resuelven todos los casos de perturbaciones externas o internas que se presentarían en los procesos simulados, si no, sólo las que se simularon. Una observación es que las reglas se generaron probándolas sdlo en el modelo del turbogenerador. Estas mismas reglas se aplicaron al modelo de los tanques, y se obtuvieron resultados similares. Este resultado se considera importante dadas las diferentes caracterlsticas de los modelos (enunciadas en 3.11.
81
Como trabajos futuros están:
a l Depurar la Base de Conocimientos e incrementar los casos de perturbaciones externas e internas, que pueda manejar.
Desarrollar una interfase amigable entre el usuario y el Sistema Experto. Esta interfase deberá considerar los casos particulares de cada modelo de proceso que se esté simulando; Exsys tiene comandos que facilitan el desarrollo de esta interfase.
lmplementar el método de sintonizado utilizando el dominio de la frecuencia (apéndice Al.
Probar los resultados con un proceso físico de laboratorio.
Probar la metodología empleada para obtener los conocimientos con algunos otros modelos de procesos.
b l
c l
dl
el
Si se desea extender el trabajo a otros modelos de procesos (inciso el, se recomienda primero profundizar en los casos presentados en este trabajo; es decir, desarrollar el inciso (a). Se considera que se pueden obtener resultados similares si los nuevos modelos de procesos presentan características similares a los modelos utilizados, pero indiscutiblemente, se requerirá de un estudio previo del nuevo modelo.
Como llneas de investigaci6n en el desarrollo de Sistemas Expertos para los sistemas de control se mencionan:
a l
b)
C l
Forma de validar una Base de Conocimientos.
Forma de generar un Sistema Experto evolutivo o con aprendizaje.
Forma de implantarse en tiempo real.
83
Ill
121
I31
141
151
161
171
181
191
1101
1111
1121
1131
1141
1151
1181
1171
1181
1191
REFERENCIAS . . .: r i . . .
Astrom. K. J. 11983). "Theory and Applications of Adaptive Control -A Survsy". Automatica, Vol. 19. pp. 471-488. i l ,
Automatica, Vd. 20, pp. 595-805. T . , ' , .<
Astrom. K. J. y E. Wittenmark 119731. 'On Self Tuning Regulators". Automatlce. Vol 9, pp. 185- 189.
Aetrom. K. J. y E. Wittenmark i1980). "SeWtuning Controllers Based on Pole-Zar0 Raoamant'. Proc. IEE. Vol. 127. No. 3.
Astrom. K. J. 11983). 'LQG Salf-tunars'. IFAC Adaptive Systems in Control end Signal Processing. San Francisco. USA. , ..
Edgart, E. I1 9801. "Satability Analysis of Disorata-time Adaptive Control Sohamas". IEEE Trans. Automat. Contr.. Vol. AC.26. pp. 710-718.
Goodwin. 0. C.. P. J. Remadge y P. E. Caines 119801. "Discrete-time Multivariable Adaptive Control", IEEE Trans. Automat. Contr., Vol. AC-25. pp. 449-468.
Morsa. A. S. 11980). - Global Stability Of Parameter:Adaptive Control System'. IEEE Trans.' Automat. Contr.. Vol AC-26. pp. 433-439. ' "' '
Narendre. K. S.. Y. H. t i n y L. S. Valavani 11980). 'Stabla Adaptive Controller Oesing -Part II: Proof of Stability', IEEE Trans. Automat. Contr., Vol AC-25..pp. 440-448.'
Rhors. C. E., L. Valavani; M. Athans y G. Stein 119811. 'Anslitycal Verification of Undesirable Properties of Direct Model Refarsnce Adaptive Control 'Algorithms', Proc. 20th Conference on
Y
Wittenmark. E. y K. J. Astrom 119841. 'Practical Issues in the lmplantatlon of Self-tuning Control'.
. .
. . I . .... 11 1
2 . .
'W , . . I..
2 - v - .: .
Decision and Control, San Diego California.' i. 1 '
Rhon, C. E.. L. Valavani. M. Athans y G. Stein'll985). 'Robustnassof Continuous-time Adaptive Control Algorithms in tha Presence of Unniodelad Dynamios', IEEE Trans. Automat. Conti.. Vol AC- 30. No. 9. pp. 881-889.
Gawthrop, P. J. K. W. Um (1 9821. 'Robustness of Self-tuning Controllars". Proc. Inst. Elac. Eng..
,, .. " t
j . . : , n , vol. 129, pp. 21-29. , Young, K. D. y P. V. Kokotodc (1982). 'Analysis of Fsadback-Loop Interactions with Actuator and Sensor Parasitics'. Automatica. Vol. 18. pp. 577-582.
Trankle, T. L. y L. 2. Markosian 11985). " A'Expsrt System For Control System Design', Proc. IIE
' r ., ' . 9 lnt. Conf. Control. Cambridge. UK.
Bernard, J. A,. K. S. Kwok y D. D.'Lanning 119851. "Experimental Evaluation of 'Fuzzy' Logic in Closed-Loop Reactor Control", Trans. of The American NUC~I Sociaty. Vol 49.
James, J. R.; P. P. bnissona. D. K. Frederick, J. H. Taylor 119851. 'A Retrospective View of CACE 111: Considarations in Coordinating Simbolic end Numeric Computation in a Rule-Basad Expert Systems". Proc. of the Sofond Conference on Artificial Intelligence Applications. Miami. Florida.
Krijgsman, A. J., H. M. T. Bioadar~, H. E. Veibruggen y P. M. Bnijin 11988). "Knowledge-Based Control'. Proc. 27th Conference on Decision and Control. Austin Texas.
James. J. R. 119881. 'A Survey of Knowledge-Eased Systems'for Computer-Aided Control System Design', Proc. 27th Conference on Decision and Control. Austin, Texas.
Minnick. D. J., H. Kaufman y G. W. Neat (1989). 'Expert Hierarchical Adaptive Controller for Robotic Systams". Proc. IEEE Intelligent Control Conference.
'1 I * ',
.< ,n.
I .'. I . T f
. - S "
~ . . ;
04
1391
1401
1411
1421
1431
1441
1451
1461
1471
1481
1491
1501
1511
1521
1531
1541
1551
1561
1571
158)
1591
Udaib. W. K. (1888). "Evaluetion of Mioiooo~uter-üwed Implmntations of Knowledge-Based Contid System'. Pioc. 27th Confeienoe on Decision end Control. Austin. Texas.
chw$, L. s. (1~88). -A NOW AUIOWW optimal ~ u n i n g strat.gy for a PID Contrdier'. ISA liens.. Vol 27, No 1.
Hoopas. H.S. W. M. Hawk y R. C. Lewis (1883I. 'A Calf-Tunig Contidlei". ISA liane. Vol 22. No 3.
Barmid, J. A. (1988). 'Use of a Rulcüwed Syetem for Piooees Contid'. Pmo. IEEE Conti. Sy.1. Mag.. Ootubie.
11988). 'A Rula Besad PIOO~~UIS FOI Salftunlng PID Contiollere'. Proa. 27th Conference on Decislon and Control, Awtln, Taxes.
Bristol. E. H. 11983). 'The Design of Industrially Useful Adaotlve Contiallars., ISA liens.. Vol. 22, No 3.
Kiaus. T. W. y T. J. Myron (1884). "Self-Tunlng PID Contiollei Ueea Pensin Racognition Appioioh". Control Engineering. Junio.
Poner, B. y A. n. Jones 11986). "Real.Time Expen Controllers Foi Plante With Aotuatoi Non. Unaaiitlee', Proa. lEEE 26th Confersnoe on Decision end Control. Los Angale., CA.
Astiom, K. J.* T. Hagglund (1984). 'Automatio Tuning of Simple Reguletors with Spacifioations on Phase end Amplitude Margine'. Autometice V d 20. No 5.
Aetrom, K. J.. T. Hagglund (1984). 'Automatic Tuning of Simple Ragulatois". Proceedings IFAC 9th Wofld Congress. üudapest.
Astrom. K. J.. T. Hagglund (1984). 'A Fiequancy Domain Method Foi Automatic Tuning of Simple Feedback Loops', 23id Conference on Decision and Control. Las Vegas, NV.
Wittaninark, 8.. K. J. Astrom (1 9801. 'Simpls Self-Tuning Ccntiollsis'. in Method and Applications in Adaptive Control.
Zafiriou, E. y M. Morari (1985). "Digital Controller for SISO Systems: A Review and New Alporithm". Int. J. Control. Va. 42. No. 4. pp. 855-876.
Arruti. A. y J. Flórez (1986). 'Intioducci6n al Diseti0 de Contioladores PID Digitales Ili-, AutofnAtica e hstNmenl~Ci6n. Novismbie.
Astrom. K. J.. B. Wittenmaik. Comoutei Controlled Svetsms: ThecN and Dssian. Englowood Cliffs, N. J.: Prentice Hall. Primara dicci6n 1984. Segunda dicción 1990.
@ata. K. lnaenierla de Control Moderno. M6xico. D.F.: Prsntica Hdl Hispanoamericana. S.A., 1984, p 902.
Tsypkin. J. A. Theorie der mlais swtema der sutomatischen reaslung. Munioh. Alemania: R. Olderr burg. 1958.
Hmd. 8. "Contribution a I'studs mathsmatiqus des wslamms de reolepe per tout-ou-rim'. C.E.M.V. Service Techniqua Asronautiqus 17. 1949.
Bsglsr. J. G. y N. 8. Nichols (1843). 'Optimum Settings FOI Automillo COntrolleis'. Trans. ASME 65.
Bristosl. E. H.. G. F. lnalo& y J. F. Stasdman 11970). 'Adaptive Process Conliol by Pattern Recognition', Instruments end Contrd Systems. March.
Bristol. E. H. 11977). 'Pattern Recopnition: an Alternative to Paianmtar Identification in Adaptiw Control'. Automatioa. Vol. 13.
86

APENblCE A m
GUlA PARA IMPLEMENTAR UNA TECNICA EN LA FRECUENCIA PARA EL MODULO SINTONIZADOR
En el método en el dominio de la frecuencia, se caracteriza el proceso por dos puntos del diagrama de Nyquist; a partir de éstos se estiman los polos del lazo cerrado más cercanos al eje imaginario del plano s. Estos polos determinan la forma de la respuesta del proceso. Conocidos estos polos, se deduce el amortiguamiento y la frecuencia natural amortiguada del lazo cerrado. Estos parámetros son utilizados para diseñar el' controlador.
Aunque se presenta a detalle la forma de implantar este método, no fue utilizado en las simulaciones realizadas. Lo que se expone a continuación constituye una guía de su implantación. Sin embargo, se hace notar que utiliza el algoritmo del módulo Presintonizador para caracterizar el proceso.
..
' ? * * h . t A. l
Si se conocen las características de la respuesta de frecuencia de un sistema, resulta posible estimar los polos de lazo cerrado más cercanos al eje jw del plano s. Para lograr esto. la tecnica empleada se basa en la representaci6n conforme del plano s en el plano G(sl , (481. La figura A. la muestra la representación conforme de llneas de u constantes y de w constantes. Estas llneas se transforman en curvas en el plano Gis), figura A.2b.
Obtencitin de 6 y w, utillzendo Is representeeitin conforme
. .,
b . 1 "
Figura A.l Transformación conforme de lineas de u en el plano sa l plano Gis) . '
- 1
. " I
Supóngase que el sistema posee al menos un par de polos complejos conjugados. Si resulta que el punto -1 +jO en el plano Gis) esta en la intersección de una curva de u constante con una de w constante, esos valores determinados de u y w, llamados u. y w,. caracterizan el polo de lazo cerrado más cercano al eje jw en el semiplano superior de s. Si se conoce la forma analítica de G(s1 se puede efectuar la representación conforme fácilmente. Si los valores de Gijw) son obtenidos de experimento, se puede construir por interpolación un cuadrado curvillneo cerca del punto -1 +jO. Con referencia a la figura A.3a. se encuentra la ubicación de los polos dominantes de lazo cerrado en el plano s, o la relación de amortiguamiento 6 y la frecuencia natural amortiguada w,, trazando la línea AB que une al punto -1 +jO (punto A), con el punto B (figura A.31. Esta linea es el máximo acercamiento del diagrama de Nyquist de GUw) al punto -1 + j0. Despues se construye el cuadrado curvillneo CDEF,
88
. , I
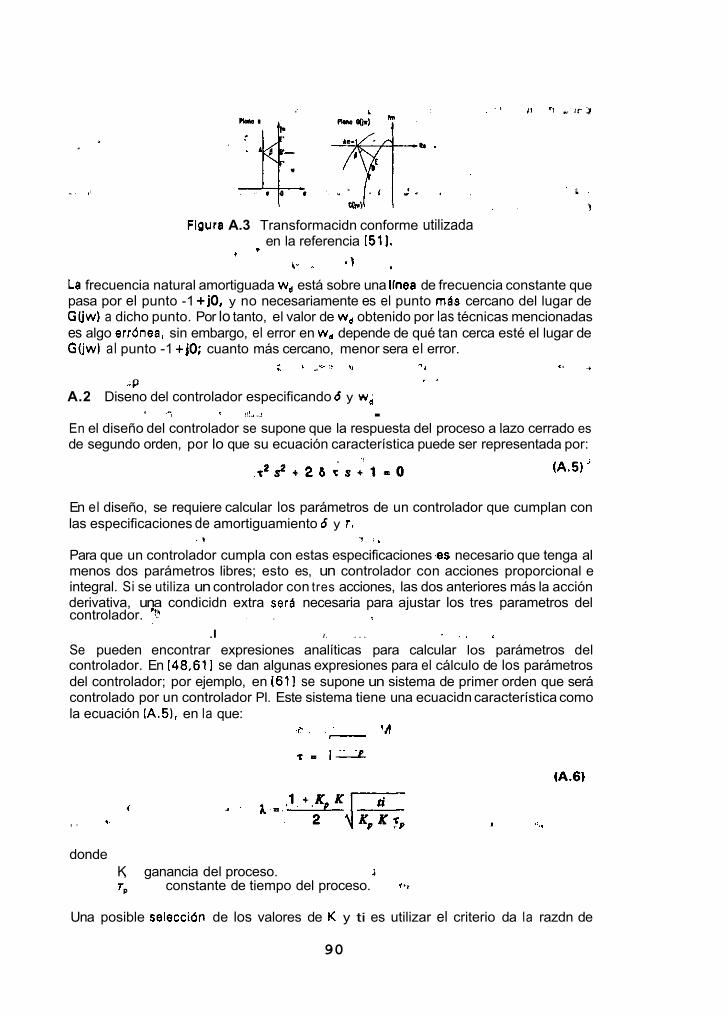
Flgura A.3 Transformacidn conforme utilizada en la referencia i511.
\" ~ - ) . ia frecuencia natural amortiguada w, está sobre una llnea de frecuencia constante que pasa por el punto -1 +io, y no necesariamente es el punto más cercano del lugar de GUw) a dicho punto. Por lo tanto, el valor de wd obtenido por las técnicas mencionadas es algo err6nea. sin embargo, el error en wd depende de qué tan cerca esté el lugar de Gíjwl al punto -1 +io; cuanto más cercano, menor sera el error.
* '
: L _ * I u 1, . I . . -P A.2 Diseno del controlador especificando d y wd
En el diseño del controlador se supone que la respuesta del proceso a lazo cerrado es de segundo orden, por lo que su ecuación característica puede ser representada por:
< ? c I , * : .
íA.5)'
En el diseño, se requiere calcular los parámetros de un controlador que cumplan con las especificaciones de amortiguamiento ó y r.
Para que un controlador cumpla con estas especificaciones .es necesario que tenga al menos dos parámetros libres; esto es, un controlador con acciones proporcional e integral. Si se utiliza un controlador con tres acciones, las dos anteriores más la acción derivativa, una condicidn extra sera necesaria para ajustar los tres parametros del
. * I* i I
controlador. :' ., . <
.I I . . . . , . . ' Se pueden encontrar expresiones analíticas para calcular los parámetros del controlador. En 148.611 se dan algunas expresiones para el cálculo de los parámetros del controlador; por ejemplo, en I611 se supone un sistema de primer orden que será controlado por un controlador PI. Este sistema tiene una ecuacidn característica como la ecuación íA.5). en la que:
' n - . P . :
iA.6)
I
, . ,.
donde K, ganancia del proceso. .i r, constante de tiempo del proceso. $*.
Una posible seleccidn de los valores de U y ti es utilizar el criterio da la razdn de
90

Gbw) + 1 varla.
Del resultado de la comparacidn se varían los parárnetros del relevador. En este punto se consideran los siguientes casos:
I.
f l
El valor pasado de Gijw) + 1 es menor que el valor actual. El valor que se le asigna a Gijw) + 1 es el rnlnimo.
El valor pasado de Gijw) + 1 es mayor que el valor actual. El valor que se le asigna a Gíjw) + 1 es el actual, que es el más pequerío.
Repetir los pasos c, d, e y f hasta que se haya encontrado el valor mínimo de Gijw) + 1.
ii .
gl
h) De las iteraciones hechas para encontrar el punto donde Gijw) + 1 es mínimo, seleccionar dos puntos que cumplan las siguientes condiciones:
i. Oue se puedan considerar equidistantes del punto donde G(jw) + 1 es rnlnimo. Para esto, se puede tomar como referencia el valor de /Gijw)/.
Oue el dngulo D formado por Gijw,) + 1 y Gijw,) + 1 sea menor de 1 O grados.
ii.
i) Si no se tienen dos puntos que cumplan estas condiciones, elegir uno de ellos y buscar el otro para que se cumplan las condiciones anteriores.
Con los dos puntos encontrados diseñar el controlador para que cumplan el r y 6 de la ecuaci6n (45).
i l
92
APENDICE 8 LlNEALlZAClON DEL MODELO MATEMATICO DEL
PROCESOS DE TANQUES
Para poder aplicar los métodos de análisis y de diseño del control clásico, es necesario linealizar el modelo matemático del proceso.
En las ecuaciones (3.51, el término no lineal es Kdh. Haciendo una expansion en series de Taylor, en un punto de operacidn he, y considerando solo los dos primeros términos de la serie, se obtiene:
h - h, K fi - K h , + K - 21 ho
Sustituyendo este resultado en las ecuaciones (3.4) cambian a:
Un m
íB.1)
In respectivo. AI alejarse de este Dunto. la reoresentación Duede ser totalmente k ~ n e a .
delo linealizado s610 es válido en una vecindad del punto de oDeraci
Una descripcidn detallada de como linealizar un modelo matemático se encuentra en 162,661.
Para eliminar los términos independientes del tiempo en el modelo lineal se introduce el concepto de variables de desviación I61 1. Las variables de desviacion representan la diferencia entre el estado actual de las variables de un modelo y su valor de estado estacionario (para el cual el modelo se linealizal. El concepto de variables de desviacidn es una operación de traslación de ejes. Aplicando este concepto las ecuaciones (8.2) se transforman a:
donde h’,, h’, son las variables de desviacidn (h‘ = h - haJ.
Estas ecuaciones no tienen términos dependientes del tiempo, por lo que es posible aplicar los métodos de análisis y diseño del control clásico. La funcidn de transferencia entre el F, y el nivel de salida se obtiene a partir de la ecuación 8.3, dando un punto de operacidn para cada tanque.
93
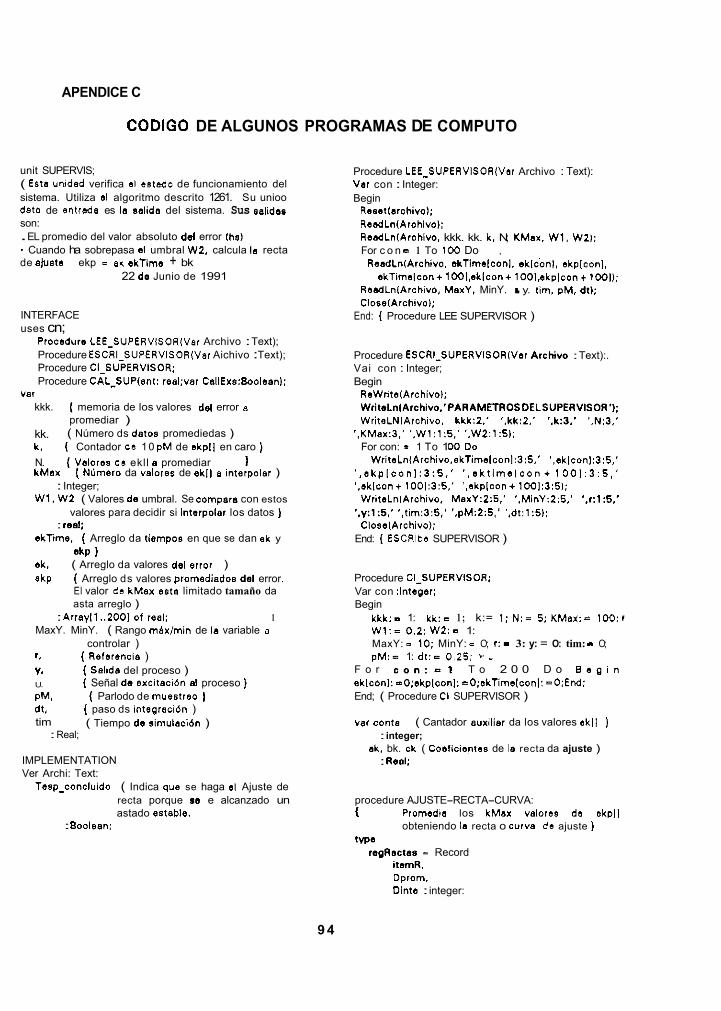
APENDICE C
CODIGO DE ALGUNOS PROGRAMAS DE COMPUTO
unit SUPERVIS; ( Este unidad verifica el estedo de funcionamiento del sistema. Utiliza el algoritmo descrito 1261. Su unioo dato de entrada es le salida del sistema. Sus salidas son: . EL promedio del valor absoluto del error lhsl - Cuando ha sobrepasa el umbral W2. calcula le recta de ariate ekp = sk ekTlma + bk
22 de Junio de 1991
INTERFACE uses cn;
Procedurs LEE-SUPERVISORlVsr Archivo : Text); Procedure ESCRI-SUPERVISORlVar Aichivo : Text); Procedure CI-SUPERVISOR: Procedure CAL-SUPlant: raaI;vsr CallExs:Booleanl:
kkk. ( memoria de los valores del error s
kk. k.
kMax
W1, W 2 ( Valores de umbral. Se compara con estos
VB,
promediar ) ( Número ds datos promediedas ) ( Contador de 10 p M de ekpll en caro )
N. ( Valores de ekll a promediar ) ( Niimaro da valorss de akl l s intarpolar )
: Integer;
valores para decidir si Interpolar los datos )
ekrime. ( Arreglo da fismpos en que se dan ak y ekp 1
ek. ( Arreglo da valores del error ) skp ( Arreglo ds valores promadiados da1 error.
El valor de kMax seta limitado tamaño da asta arreglo )
: real;
: Arrayl1..2001 of real; 1 MaxY. MinY. ( Rango mhxlmin de le variable a
1. ( Refarsncis ) Y. U.
PM. dt. tim
controlar )
( Salida del proceso ) ( Señal de sxcifación al proceso ) ( Parlodo de muestrso 1
( paso ds intagracidn ) ( Tiempo de simuleci6n )
: Real;
IMPLEMENTATION Ver Archi: Text:
Tespconcluido ( Indica que se haga el Ajuste de recta porque se e alcanzado un astado astable.
: Boolean:
Procedure LEE-SUPERVISORIVar Archivo : Text): Ver con : Integer: Begin
Rssstlerchivol: RedLnlAichivol: RedLnlArohivo. kkk. kk. k. N; KMax. W1. W21: For c o n = 1 To 100 Do ,
RaedLnlArchivo. ekrimelconl. eklconl, ekpleonl. ekTimelcon+ 1001,sklcon+ 1001,ekplcon+ 10011;
RedLnlArchivo. MaxY. MinY. I. y. tim. pM. di); CloselArchivol:
End: ( Procedure LEE SUPERVISOR )
Procedure ESCRI-SUPERVISORIV~I AIC~~VO : Text):. Vai con : Integer; Begin
ReWritelArchivol: WriieLnlAichivo.'PARAMETROSOELSUPERVlSOR'l; WritaLNIAichivo. kkk:2,' '.kk:2.' ',k:3,' '.N:3,'
For con: = 1 To 1 O0 00 '.KMax:3.' ',Wl:l:S,' ',WZ:1:51:
WriteLnlArchivo,akTimalconl:3:5,' '.eklconl:3:5.' ' . ekp lcon l :3 :5 . ' ' . e k t i m e l c o n + 1001:3:5, ' '.aklcon+ 1001:3:5,' '.akploon+ 1001:3:51;
WritaLnlArchiva. MaxY:2:5.' '.MinY:2:5; ',1:1:5; ',y:1:5,' ',tim:3:5,' ',pM:2:5.' '.dt:l 5 1 :
CloselArchivol: End: ( ESCRlbe SUPERVISOR )
Procedure CI-SUPERVISOR; Var con :Integer: Begin
kkk:= 1: kk:= 1 ; k:= 1;N:= 5;KMsx:= 1 W : l w1:= 0.2: wz:= 1: MaxY: = 10; MinY: = O; I: = 3: y: = O: tim: = O; pM:= 1: dt:= 0.25: -
F o r c a n : = l T o 2 0 0 D o B a g i n aklconl: =O:ekplconl: =O:ekTimelconl: -0:End: End; ( Procedure CI SUPERVISOR )
vsr conta ( Cantador auxilisr da los valores ekl l )
ak. bk. ck ( Coeficis?tss de la recta da ajuste ) : integer;
: Rad:
procedure AJUSTE-RECTA-CURVA: ( Pramsdia los kMax valorss ds skpll
two obteniendo le recta o curva de ajuste )
i s g R ~ ~ a s = Record itsmR. Dprom. Dints : integer:
9 4
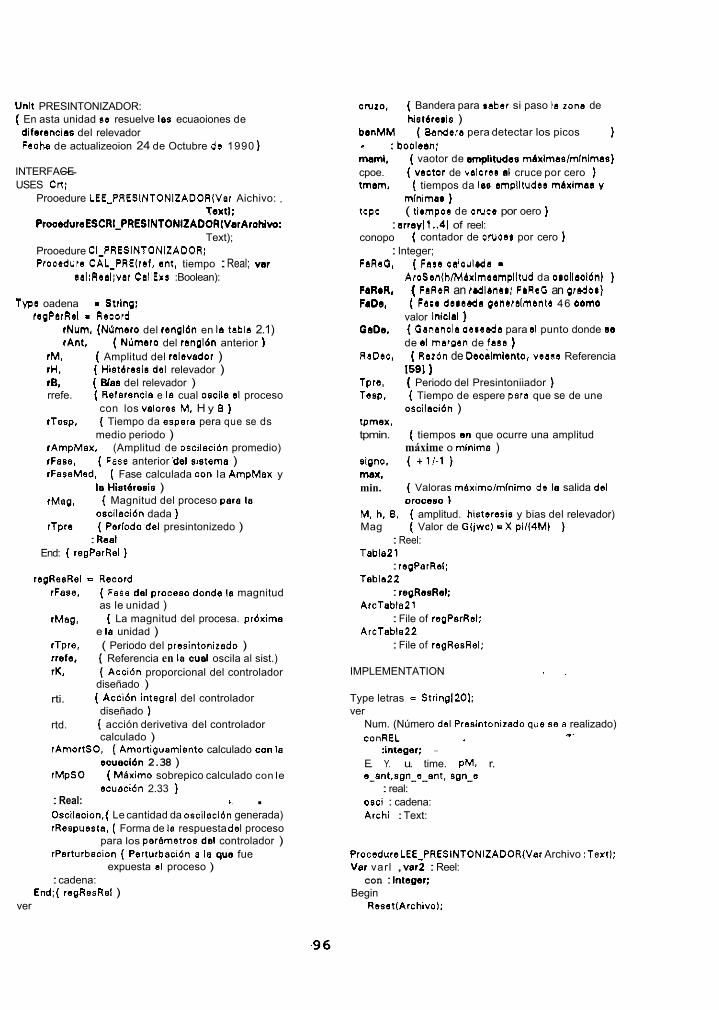
Unit PRESINTONIZADOR: ( En asta unidad se resuelve les ecuaoiones de
difarancias del relevador Feoh. de actualizeoion 24 de Octubre de 1990 )
INTERFACE ~ ~-
USES Cit; Prooedure LEEPRESlNTONlZADORlVar Aichivo: ,
Tartl. . _^_.. ProoedureESCRI~PRESINTONlZADORIVarArohlv:
Prooedure CI-PRESINTONIZADOR: Proosdura CAL-PRE(ref, ant, tiempo : Real; ver
Text);
eal:Raal:var CallExe :Boolean):
Type oadena - 8tilng: tapParRel - Reoord
rNum, (NSmero del rengldn en la tabla 2.1) rAnt, ( Nilmoro del rengl6n anterior 1
rM, ( Amplitud del relevedoi ) rH, ( Histdraais del relevador ) 10, ( Usa del relevador ) rrefe. ( Referenole e la cual osoile el proceso
con los valoras M. H y 8 ) rTesp. ( Tiempo da espera pera que se ds
medio periodo ) rAmpMsx. (Amplitud de oscileci6n promedio) rFase, ( Fese anterior del sistame ) iFaseMed. ( Fase calculada con la AmpMax y
la H i s t h e i s ) rMag.
oecilaci6n dada ) rTpre ( Periododel presintonizedo )
( Magnitud del proceso pera la
: Real End: ( iegParRel )
regRasRsl = Record rFase.
iMag.
rTpre. rrsfe, rK.
rti.
rtd.
rAmortSO. ( Amortigusmiento calculado c m Is
rMpSO { MAximo sobrepico calculado con le
: Real: >. . Oscilscian,{ Le cantidad da oscilaci6n generada) rRespueste. ( Forma de la respuesta del proceso
para los parhmetros del controlador ) rPsrturbacion ( Perturbacidn B la que fue
: cadena: End;( ragRasRel )
( Fase del proceno donde le magnitud as le unidad ) ( La magnitud del procesa. pr6xima
e le unidad ) ( Periodo del presintonizedo ) ( Referencia en Is cue1 oscila al sist.) ( Acoidn proporcional del controlador
diseñado ) ( Acci6n integral del controlador diseñado ) ( acción derivetiva del controlador calculado )
scuaci6n 2.38 )
scuaoi6n 2.33 )
expuesta .I proceso )
ver
cruzo.
banMM ( Bandere pera detectar los picos )
maml, ( vaotor de am+.litudes m6xlmaslminimas) cpoe. ( veotor de valorem al cruce por cero ) tmam. ( tiempos da las amplltudea m6xlmae Y
minimae ) topa ( Uempoe de O N C ~ por oero )
conopo
FaReQ, ( Fase odou lda - FaReR, FaDe,
QaDe.
( Bandera para naber si paso la zona de hist6rsnls )
:boolean:
: arrayll..41 of reel:
: Integer; ( contador de 0 ~ 0 0 s por cero )
AroSen(h/MAxlmeamplltud da onollaoldn) ) 1: FaReR an rrdlanan: FnRaQ an oradon) ( Faea deiaeda eeneralmente 46 Domo
valor iniolal ) ( Qenanola densada para el punto donde ne de el meraen de fees 1
RaDec,
Tpre. TOSP.
tpmsx. tpmin.
aigno. man. min.
( Razdn de üeoiimieAto, vease Referencia 1591 ) { Periodo del Presintoniiador ) ( Tiempo de espere pmra que se de une
oscileci6n )
( tiempos en que ocurre una amplitud máxime o minims ) ( +1/-1 )
( Valoras máximohínimo de 1. salida del DrOC.380 1
M. h. B. ( amplitud. histeresis y bias del relevador) Mag ( Valor de Gljwc) = X pilI4M) )
Tabla21
Tebla22
ArcTabls21
ArcTablaZ2
: Reel:
: regPerRsl:
: isgRssRal;
: File of rspPerRel:
: File of regResRel:
IMPLEMENTATION , .
Type letras = Stringl201: ver
Num. (Número del Presintaniiado que sa B realizado) conREL 1
E. Y. u. time. PM. r.
e.
:integer: -
s-ant.agn-s-snt, sgn-s : real:
osci : cadena: Archi : Text:
PracsduraLEE_PRESINTONIZADORlVar Archivo :Text): Ver varl , ver2 : Reel:
Begin con : Inlager;
RssetIArchivo):

and: With Tabla21 Do
Begin rMag: = Mag: rTpre: = Tpra: riefa: = refe: iM:= M: rH:= H; r E = B: iTssp: =Tssp;iAmpMax: =AmpMax?Fese: = Fase; rFasaMsd: = FeRaG: rNum: = 2: rAnt: - 1:
WritelArcTabla21 .Tabla21 1 ; Closa(ArcTablaZ1i;
AssipnlArcTabls22,'E:\TABLA22.DTS'); ($1.) RasetlArcTabla22): ($1 +) If IORssult < > O Than RaWnta(ArcTabla2Zi
With Tabla22 Do
and:
Else SaaklArcTabla22.FilaSiza~ArcT~la22~1:
Begin iFasa: = FaRaG; Mag: = Mag: irafe:= refs; rK:= K; fü := ti; rtd := td; rAmortSO:= O: iMpS0.- O: iRaspuesta: = 'Indafinida': rPamrbs*on:=
Oscilacion: = 'Indafinida':
rTpie: -Tpre;
'Indefinida':
and: WritaIArcTabla22.Tabla22~: CloselArcTabla22i:
End; ( procadura PERIAMPL )
PROCEDURE CAL-PRE(iaf. ant, tiampo : Real; var sal:Rasl: Vsi CallExs: Boolaan):
, Bagin procedure SGN(var sign:raali;
If sign> O than sign:= 1: If sign= O than sign:- O; If sign< O than sign:= -1;
and; ( Procedure SIGNO )
Begin Assign(Archi.'E\VARIAELE.PRE'i; LEE-PRESINTONIZADORlArchii: y: = ant: r: = r a t tima: = tiempo;
( Calcula la sanal dsl ralevador ) a-ant:= E: E:= I -y: if E > h than signo:= 1: if E <-hthan signo:=-1: u : = B + M * s i g n o : sal: = u:
( Datacta los C N C ~ p o i caro an la bandera banMM; ha pasado 1. zona
de hist6rasis (bandera cnizoi ) sgn-a-ant: = a-ant: SGNisgn-e-anti; san-e: = E;
if (son-e < > sgn-a-anti and CNZO and (abslE) < h) SGNisgn-a):
than begin
CNZO: =Fdsa:banMM: =trua;concpc: -concpc+ 1; cpcalconcpcl : = y; tcpclconcpcl: = tima ~ pM; end:
if (abs(Ei > hi than CNZO: = true;
( Datacta los mAximos y mlnimoa da la señal ) i fmaxey than bagin max:=y;tpmex:-timrpM;snd:
if min>y then begin min:=y; tpmin:=tima-pM: end;
i f notlcruzoi and benMM then begin banMM := False: if E > O then begin tmamIconcpcl:= tpmax:
mmilconcpcl: = max; end else begin tmamlconcpcl: = tpmin;
mamilconcpel: = mln; end: m(u:= -1o;min:= 10; If concpo - 3 then
Begin conREL:= conREL + 1: PERIAMPLlrefi: ooncpc:= 1; tcpcl41: = tcpcl l l ; cpcal41: = cpcall I: tmml41:- tmnmlll: mamil41:= msmilll: tcpcl l I := tcpcl3I: cpcell l: E cpcel3l; tmaml1l:- tmml3 I : mamilll:= mamil3I: CallExs: P TNO; end; and
Else CallExe: = False; ESCRIPRESINTONIZADORlArc~i:
end; ( Procedure CALcula PREsintonizedor )
BEGIN END. ( Unit PRESINTONIZADOR )
98

APENDICE D
. REGLAS DE LA BASE DE CONOCIMIENTOS Y ARCHIVO DE COMANDOS
Derivation: FIRST RULE ONLY
PROBABILITY SYSTEM: 2
DISPLAY THRESHOLD: 1
QUALIFIERS:
I' Qualifier i ü> EL operador Indica hecai
V> un Piesintonizado V> un Sintonizado V> un cambio de raferencia V> nada
I * Qualifier 2 Q> El cembio de referencia as
V> mayor que el 15% V> menor qua el 1596
/. aualifiei 3 a> El sistema as
V> inicializado V> reinicialitado
I * Qualifier 4 Q > La forma de la respuesta es
V> la deseada V> buena V> mala
I' Qualifier 5 a> EI sistema as18
V> en estado estable V> oscilando por a1 relevedor v> inestable V> marginalmente establo V > con error por el relevadar V> indefinido
I . aueiifiai 13 Q> El modo del controlador es
V> manual V> autom6tico V> de acei6n inversa
/* Qualifier 7 Q> El punto crltico as
V> encontrado V > tw encontrado
I' Qualifier ü a> LO 0 s ~ i i a ~ i 6 n ene era da OS
V> menor que un medio pedodo V > medio pedodo. V> un peddo V> indefinida
I' Qualifier a a> Los p e r h e t i n s del relevador eon
V> tomados de le Base de Datos (Tabla 2.11 V> cdculados con las ecuaciones (2.20 y 211
I * auaiifiai i o (1s La asignaci6n de parhmetios el ralevedoi
V> se puede hacer V > no se puede hacei
CHOICES:
I' Choice 1 c > Lato SupeMsoi
/* Choice 2 C > Lazo Presintonitador
I * Choice 3 C> Lazo Sintomiador
I* Choice 4 C> Pardmetros del relevador
/* Choice 5 C > Estado del proceso
I * Choice 6 c> Punto cdtico
VARIABLES:
ILAZO A FUNCIONAR1 El l am que entia a funcionar
[CAMBIO DE REFERENCIA1 Es la magnitud del último cambio de refaisncla
IAMORT DADO1 El amortiguamiento que se rsquiars en .I pmcsso
IAMORT SO1 Amortiguamiento obtenido del pioceeo lcelculado con 1. ecuaci6n 2.381.
99
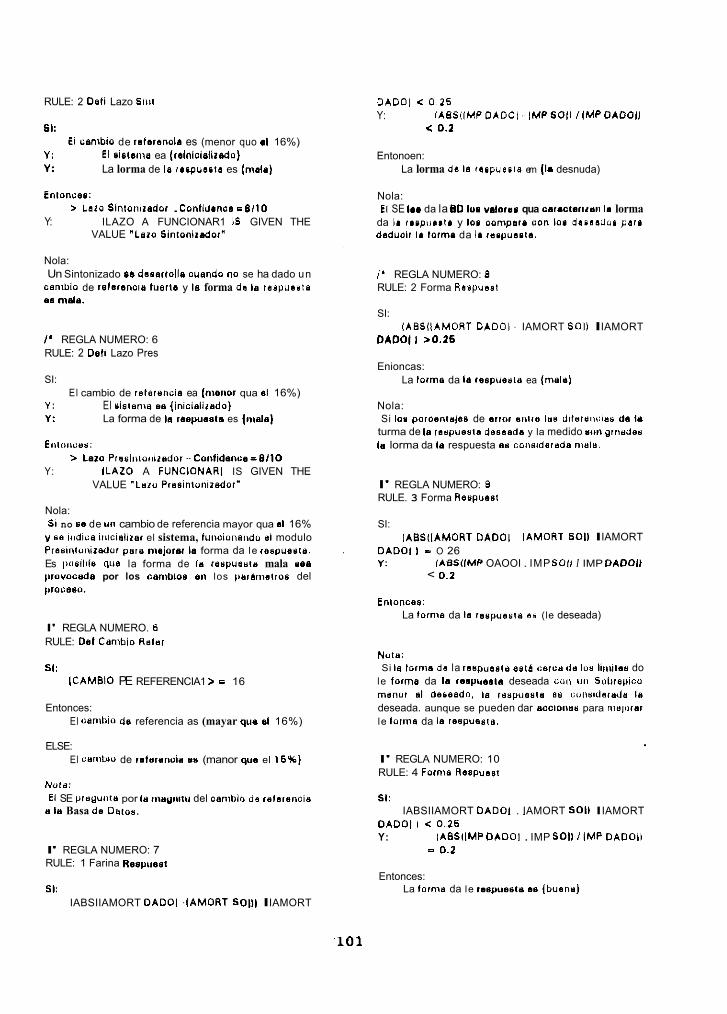
RULE: 2 Defi Lazo Siiil
SI:
Y: El alelema ea (ralnlcializado) Y:
Enlonoas:
Y: ILAZO A FUNCIONAR1 IS GIVEN THE
El oenibio de ralorenola es (menor quo el 16%)
La lorma de la iaapunnia es (main)
> Lazo Sinianlzudar . Conlidanon = 6/10
VALUE "Lela Sinianizador"
Nola: Un Sintonizado es desarrolla ouando no se ha dado un
oanbio de referenola fuarto y la forma de la raspuesir es mala.
I' REGLA NUMERO: 6 RULE: 2 Deli Lazo Pres
SI:
Y: El elstenis 08 (inicieliaeda) Y:
Enionias: > Lalo Prasiniaiiizsdor - Coi~Iidsnca=üllO
Y: ILAZO A FUNCIONAR1 IS GIVEN THE
El cambio de reterenola ea (monoi qua el 16%)
La forma de la reepuaale es (mala)
VALUE "Lam Presinlonizador'
Nola: Si no se de un cambio de referencia mayor qua el 16%
y ne iiidica iniciaüaar el sistema, tuiioioiianddu e1 modulo Prasiniuiiizadur pare nwiorar la forma da le mspuarie. Es posibls que la forma de Is ionpunsla mala e m provocada por los can>(>ios en los paiAmalios del pr0i:sau.
I' REGLA NUMERO. 6 RULE: Os1 Cambio Rala,
SI: ICAMBIO PE REFERENCIA1 > = 16
Entonces: El cambia de referencia as (mayar qua el 16%)
ELSE: El cambio de ratsrenoie es (manor que el 15%)
Note: El SE prauuiila por Id mayn11u del canibia de retsiancie
a 1. Basa de Dniaa.
I' REGLA NUMERO: 7 RULE: 1 Farina Rsspiiesi
SI: IABSIIAMORT DADOl -1AMORT SOIII I IAMORT
DADOl < 0.26 Y: IABSíIMPDADOI - IMPS011 /IMPOA0011
< 0.2
Entonoen: La lorma de la ienpuenia em (la desnuda)
Nola: El SE la. da la BO Ius valoi#i qua ceracleriinii I. lorma
da la iaspii.sla y Ion oomparn con los denmoilus para daduoir la taima da la rewuesle.
I' REGLA NUMERO: ü RULE: 2 Forma Raspussi
SI:
DADO1 I >0.25
Enioncas:
(ABSIIAMORT DADOl - IAMORT SO11 I IAMORT
La torme da la respuesia ea (main)
Nola: Si los parosniejes de mor enlie lw difeiaiic:ias da le
turma de la raapussla desseda y la medido son urnades 1. lorma da la respuesta es considerada niala.
I' REGLA NUMERO: 8 RULE. 3 Forma Respues1
SI:
OADOI I - O 26 Y:
IAESIIAMORT DADO1 IAMORT SO11 I IAMORT
íA8SílMP OAOOI . IMP SO11 I IMP OAOOII < 0.2
Enionces: La torma da la isspusala (18 (le deseada)
Nula: Si la torma de la rsspuasie asiA cerca de los 1 in~i Ia~ do
le tarme da la ie~puesla deseada con k m Sabrapicu manor el daseadn. la raapuasia aa imiiaidatada la deseada. aunque se pueden dar moiniiBb para nialorar le tarma da la raspuasia.
I' REGLA NUMERO: 10 RULE: 4 Forme Rsspuast
51: IABSIIAMORT DADO1 . IAMORT SO11 I IAMORT . .
OAOOI I < 0.26 Y: IAESIIMP DA001 . IMP SOU / IMP DADOII - 0.2
Entonces: La farms da le re~puesla es (buanr)
'101
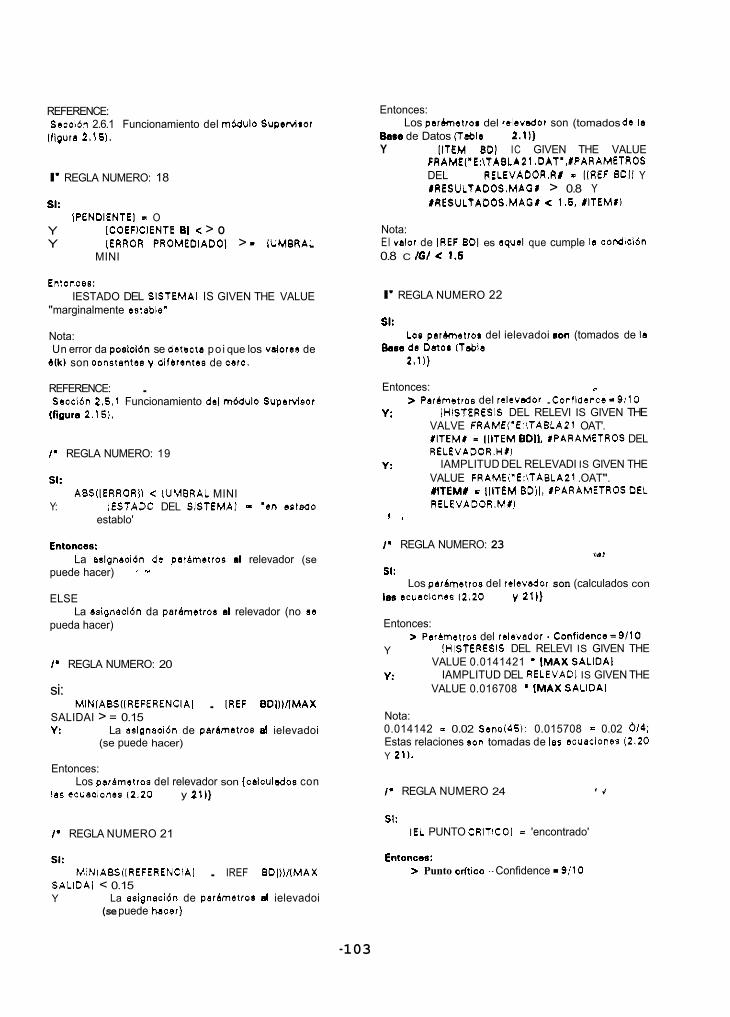
REFERENCE: Sacci6n 2.6.1 Funcionamiento del m6dulo SupeMsoi Ifiguia 2.16).
I' REGLA NUMERO: 18
SI:
Y Y IERROR PROMEDIADDI > - IUMBRAL
IPENDIENTEI = O ICOEFICIENTE 81 < > O
MINI
Entoncae: IESTADO DEL SISTEMAI IS GIVEN THE VALUE
"marginalmente estable"
Nota: Un error da posici6n se detecte po i que los v d o m de
blk) son oonstantea Y dileientes de ceio.
REFERENCE: . Secci6n 2.5.1 Funcionamiento del m6dulo SupaMsoi (f¡QUia 2.15).
I* REGLA NUMERO: 19
SI:
Y: [ESTADO DEL SISTEMAI = 'en astado ABS(IERR0RI) < (UMBRAL MINI
establo'
E"t0"CeS:
puede hacer) ' - ELSE
pueda hacer)
La asigneci6n de pai6metros el relevador (se
La ssignsci6n da paiAmetroe el relevador (no eo
I. REGLA NUMERO: 20
si:
SALIDAI > = 0.15 Y:
MINIABSIIREFERENCIAI . IREF BDIIVlMAX
La asignaci6n de parhmetros a! ielevadoi (se puede hacer)
Entonces:
las ecuecionas 12.20 y 21)) Los parlimeiros del relevador son (eelculados con
I' REGLA NUMERO 21
SI:
SALiOAl < 0.15 Y
MINIABSIIREFERENCIAI . IREF BDI))/IMAX
La asignecidn de parhmetros al ielevadoi (se puede hacei)
Entonces:
Bane de Datos (Table 2.11) Los p a i h t r o s del idevadof son (tomados da le
Y [ITEM BDI IC GIVEN THE VALUE FRAME('E:\TABLAZl .DAT'.#PARAMETROS DEL RELEVADOR.R# - [[REF Boll Y IRESULTADOS.MAG# > 0.8 Y #RESULTADDS.MAG# < 1.6. #ITEM#)
Nota: El veloi de IREF BDI es aquel que cumple le oondicidn 0.8 C Kif < 1.5
I' REGLA NUMERO 22
SI:
&#e de Dalos I T d e Los p a i h t i o s del ielevadoi eon (tomados de le
2.0)
Entonces: <
Y: > Perhmetros del islevadoi . Conlidence-9110
IHISTERESIS DEL RELEVI IS GIVEN THE VALVE FRAMEf'E:\TABLA21 OAT'. #ITEM# = IllTEM BOIL IPARAMETROS DEL RELEVAOOR.H#)
IAMPLITUD DEL RELEVADI IS GIVEN THE VALUE FRAMEI"E:\TABLAZl .OAT". #ITEM# D IllTEM BDII. #PARAMETROS DEL RELEVAOOR.M#)
Y:
g ,
I. REGLA NUMERO: 23
51:
las ecueciones (2.20 Y 2 0 )
id>
Los paiámetios del ielevedor son (calculados con
Entonces:
Y
Y:
> Parhet ios del ielsvadoi. Confidsnce=9/10
VALUE 0.0141421 ' (MAX SALIDAI
VALUE 0.016708 * [MAX SALIDAI
IHISTERESIC DEL RELEVI IS GIVEN THE
IAMPLITUD DEL RELEVAD1 IS GIVEN THE
Nota: 0.014142 = 0.02 Senol45): 0.015708 = 0.02 614; Estas relaciones son tomadas de las ecuacionss 12.20 Y 211.
I. REGLA NUMERO 24 'I
51: [EL PUNTO CRlTICOl = 'encontrado'
Entoncss: > Punto odtico - Confidence 59/10
-103
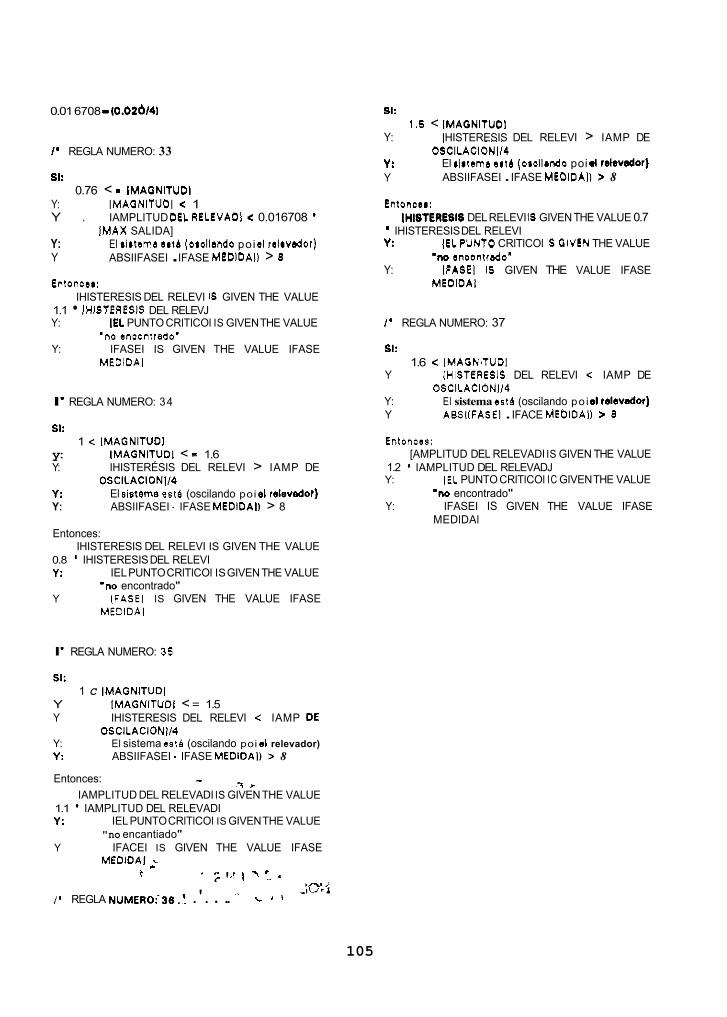
0.01 6708 -(0.026/41 SI: 1.S < IMAGNITUDJ
Y: IHISTERESIS DEL RELEVI > IAMP DE I. REGLA NUMERO: 33
SI: 0.76 < - IMAGNITUDI
Y: IMAGNITUDI < 1 Y . IAMPLITUD DELRELEVADI < 0.016708 '
[MAX SALIDA] Y: El mlmtema o i i A (omailando poi el ielmvdoi) Y
Enlonoem: IHISTERESIS DEL RELEVI IS GIVEN THE VALUE
1.1 IHlSTERESlS DEL RELEVJ Y: [EL PUNTO CRlTlCOl IS GIVEN THE VALUE
Y: IFASEI IS GIVEN THE VALUE IFASE
ABSIIFASEI . IFASE MEDIDA!) > 8
'no enocntisdo'
MEDlDAl
I' REGLA NUMERO: 34
SI:
y: IMAGNITUDI < - 1.6 1 c IMAGNITUOI
Y: IHISTERÉSIS DEL RELEVI > IAMP DE OSCILACIONlI4
Y: Y:
El sisteme está (oscilando poi el iele~edoi) ABSIIFASEI - IFASE MEDIDA11 > 8
Entonces: IHISTERESIS DEL RELEVI IS GIVEN THE VALUE
0.8 * IHISTERESIS DEL RELEVI Y: IEL PUNTO CRlTlCOl IS GIVEN THE VALUE
Y IFASEI IS GIVEN THE VALUE IFASE *no encontrado"
MEOlDAl
I' REGLA NUMERO: 35
SI:
Y IMAGNITUDI < = 1.5 Y IHISTERESIS DEL RELEVI c IAMP DE
OSCILACION1I4 Y: El sistema está (oscilando poi el relevador) Y: ABSIIFASEI - IFASE MEDIDAII > 8
Entonces: - IAMPLITUD DEL RELEVADI IS GIVEN THE VALUE
1.1 * IAMPLITUD DEL RELEVADI Y: IEL PUNTO CRlTlCOl IS GIVEN THE VALUE
Y IFACEI IS GIVEN THE VALUE IFASE
1 C IMAGNITUDI
.7 r
"no encantiado"
MEOIOAJ 2 t > t.t 1 y ..
/' REGLA NUMERO:38.'. . ' . . .. " L 6 ' -'c'i
DSCILACIONII4 Y: Y
Enionoei: [HlSTERE8IS DEL RELEVI IS GIVEN THE VALUE 0.7
' IHISTERESIS DEL RELEVI Y: IEL PUNTO CRlTlCOl IS QIVEN THE VALUE
Y: IFASEI IS GIVEN THE VALUE IFASE
El driema eriA (omallindo poi 01 ielevdor) ABSIIFASEI . IFASE MEDIDAII > 8
*no enoanirdo"
MEDlDAl
I' REGLA NUMERO: 37
SI: 1.6 < IMAGNITUDI
Y IHICTERESIS DEL RELEVI < IAMP DE OSCILAClONII4
Y: Y
Entoncss: [AMPLITUD DEL RELEVADI IS GIVEN THE VALUE
1.2 ' IAMPLITUD DEL RELEVADJ Y: IEL PUNTO CRlTlCOl IC GIVEN THE VALUE
*no encontrado" Y: IFASEI IS GIVEN THE VALUE IFASE
MEDlDAl
El sistema está (oscilando po i .I IOleVadOr) ABCIIFASEI . IFACE MEbiOAII > 8
105