apuntes funciones de varias variables
DESCRIPTION
Apuntes Funciones de Varias VariablesTRANSCRIPT

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �1
Universidad Técnica Federico Santa MaríaDepartamento de Matemática
VARIAS VARIABLESpara MAT023
Verónica Gruenberg [email protected]
1. Nociones de Topología en el Espacio Euclideano Rn
Definición 1.1. En el espacio vectorial Rn, definimos el producto interior euclideano entre losvectores ~x, ~y ∈ Rn, ~x = (x1, x2, · · · , xn), ~y = (y1, y2, · · · , yn) como
〈~x, ~y〉 = 〈(x1, x2, · · · , xn), (y1, y2, · · · , yn)〉 =
n∑i=1
xi yi
El espacio vectorial Rn dotado del producto interior euclideano se denomina espacio vectorialeuclideano de dimensión n.
Propiedades 1.1. Sean ~x, ~y, ~z ∈ Rn, α, β ∈ R. Entonces se cumplen las siguientes:
1. 〈~x, ~x〉 ≥ 0 y 〈~x, ~x〉 = 0 ⇐⇒ ~x =−→0 .
2. 〈~x, ~y〉 = 〈~y, ~x〉.
3. 〈α~x + β~y,~z〉 = α〈~x,~z〉+ β〈~y,~z〉.
Demostración. Ejercicio para el lector.
Definición 1.2. Sea ~x ∈ Rn, ~x = (x1, x2, · · · , xn). Definimos la norma de ~x, y la denotamos por‖~x‖, a
‖~x‖ =
√√√√ n∑i=1
x2i
Notar que la norma de un vector en Rn así definida es un número real no negativo y correspondeal tamaño ó magnitud de dicho vector.
Definición 1.3. Si ~x, ~y ∈ Rn, ~x = (x1, x2, · · · , xn), ~y = (y1, y2, · · · , yn), entonces la distanciaentre ellos está dada por
d(~x, ~y) = ‖~x− ~y‖ =
√√√√ n∑i=1
(xi − yi)2.

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �2
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
Si n = 1, 2 ó 3, la distancia así definida coincide con la distancia euclideana usual.
En efecto, si n = 1, ~x = x ∈ R, ~y = y ∈ R, por lo que la distancia
d(~x, ~y) = d(x, y) =√
(x− y)2 = |x− y|
Si n = 2, ~x = (x1, x2), ~y = (y1, y2), entonces
d(~x, ~y) = ‖~x− ~y‖ =
√√√√ 2∑i=1
(xi − yi)2 =√
(x1 − y1)2 + (x2 − y2)2
Análogamente en el caso en que n = 3.
A continuación, presentamos las propiedades fundamentales que satisfacen la norma de un vectory la distancia entre dos vectores.
Propiedades 1.2. Sean ~x, ~y,~z ∈ Rn, α ∈ R. Entonces se cumplen las siguientes:
1. ‖~x‖ ≥ 0
2. ‖~x‖ = 0 ⇐⇒ ~x =−→0 .
3. ‖α~x‖ = |α| ‖~x‖.4. ‖~x− ~y‖ = ‖~y − ~x‖ .
5. d(~x, ~y) ≥ 0
6. d(~x, ~y) = 0 ⇐⇒ ~x = ~y
7. d(~x, ~y) = d(~y, ~x)
8.
∣∣∣∣∣n∑i=1
xiyi
∣∣∣∣∣ ≤ ‖~x‖ ‖~y‖, conocida como la desigualdad de Cauchy–Schwarz.
9. ‖~x + ~y‖ ≤ ‖~x‖+ ‖~y‖ 10. d(~x, ~y) ≤ d(~x,~z) + d(~z, ~y)
conocidas como desigualdad triangular, tanto para la norma como para la distancia.
Demostración. Demostraremos sólo 8, 9 y 10.
8. Supongamos que ~x, ~y son vectores l.i. Luego, t~x−~y 6= −→0 , ∀t ∈ R, de donde ‖t~x− ~y‖2 6= 0,es decir:
(tx1 − y1)2 + (tx2 − y2)2 + · · ·+ (txn − yn)2 6= 0
Reescribiendo esta relación como una cuadrática en la variable t:(n∑i=1
x2i
)t2 − 2
(n∑i=1
xiyi
)t +
(n∑i=1
y2i
)6= 0
Esto significa que el discriminante de la correspondiente ecuación de segundo grado en t esnegativo, es decir,
MAT023 (2◦ sem. 2011) 2
Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �3
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
4
(n∑i=1
xiyi
)2
− 4
(n∑i=1
x2i
) (n∑i=1
y2i
)< 0
⇐⇒(
n∑i=1
xiyi
)2
<
(n∑i=1
x2i
) (n∑i=1
y2i
)
y extrayendo raíz cuadrada a ambos lados de la desigualdad, obtenemos la desigualdad pedida.
9.‖~x + ~y‖2 = (~x + ~y) · (~x + ~y)
= ‖~x‖2 + 2 (~x · ~y) + ‖~y‖2≤ ‖~x‖2 + 2 |~x · ~y| + ‖~y‖2≤ ‖~x‖2 + 2 ‖~x‖ ‖~y‖ + ‖~y‖2≤ (‖~x‖+ ‖~y‖)2
Nuevamente, extrayendo raíz cuadrada, obtenemos lo pedido.
10. d(~x, ~y) = ‖~x− ~y‖ = ‖~x− ~z + ~z− ~y‖ ≤ ‖~x− ~z‖+ ‖~z− ~y‖ ≤ d(~x,~z) + d(~z, ~y)
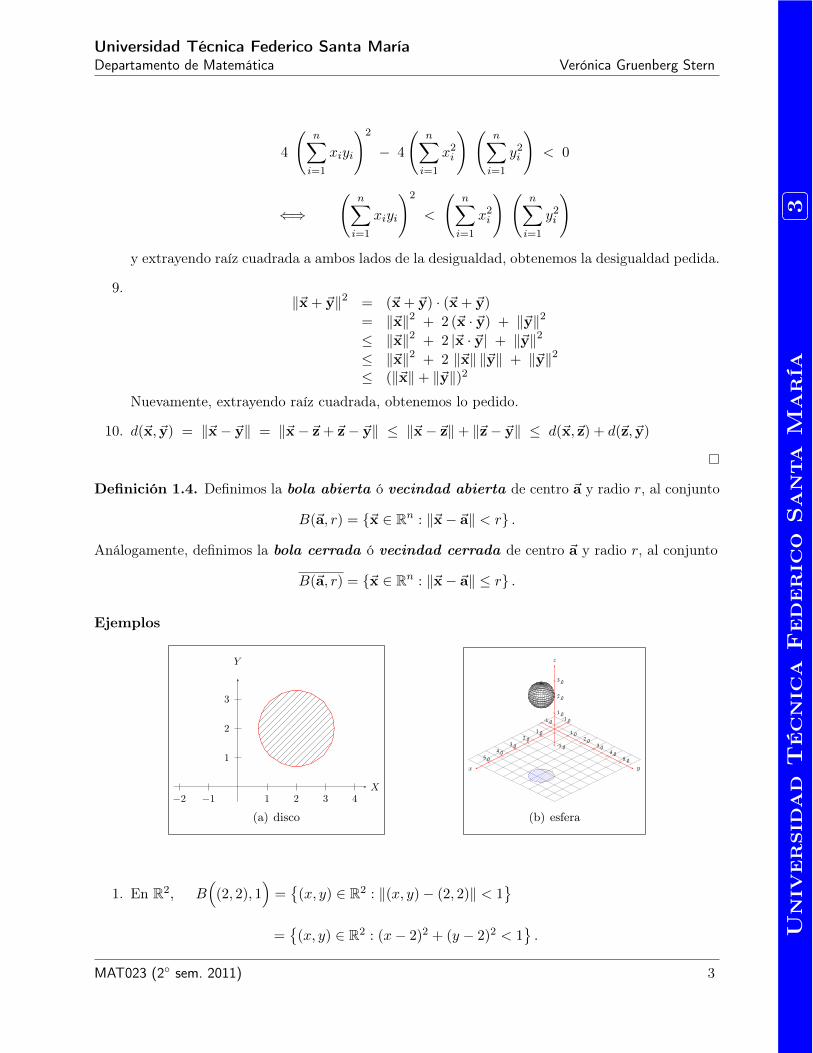
Definición 1.4. Definimos la bola abierta ó vecindad abierta de centro ~a y radio r, al conjunto
B(~a, r) = {~x ∈ Rn : ‖~x− ~a‖ < r} .
Análogamente, definimos la bola cerrada ó vecindad cerrada de centro ~a y radio r, al conjunto
B(~a, r) = {~x ∈ Rn : ‖~x− ~a‖ ≤ r} .
Ejemplos
1 2 3 4−1−2
1
2
3
X
Y
(a) disco
x y
z
1.02.0
3.04.0
5.0
-1.0
1.02.0
3.04.0
5.0
-1.0
1.0
2.0
3.0
-1.0
(b) esfera
1. En R2, B(
(2, 2), 1)
={
(x, y) ∈ R2 : ‖(x, y)− (2, 2)‖ < 1}
={
(x, y) ∈ R2 : (x− 2)2 + (y − 2)2 < 1}.
MAT023 (2◦ sem. 2011) 3

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �4
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
2. Análogamente, en R3, B(
(2, 2, 1), 1)
={
(x, y, z) ∈ R3 : (x− 2)2 + (y − 2)2 + (z − 12 < 1}.
3. En ambos casos, las bolas cerradas corresponden a los conjuntos anteriores con sus respectivosbordes, es decir:
B(
(2, 2), 1)
={
(x, y) ∈ R2 : (x− 2)2 + (y − 2)2 ≤ 1}
B(
(2, 2, 1), 1)
={
(x, y, z) ∈ R3 : (x− 2)2 + (y − 2)2 + (z − 12 ≤ 1}
Definición 1.5. Sea U ⊆ Rn. Diremos que el conjunto U es abierto ⇐⇒ ∀x0 ∈ U ∃r > 0 :B(x0, r) ⊂ U .
Ejemplos
1. En R, los intervalos de la forma I1 =]a, b[, I2 =] −∞, b[, I3 =]a,∞[ son conjuntos abiertos.En cambio no son conjuntos abiertos los intervalos de la forma I4 = [a, b], I5 =]a, b],I6 = [a, b[, I7 =]−∞, b], I8 = [a,∞[.
2. En R2, el conjunto A = {(x, y) ∈ R2 : x2 + y2 < 1} = B(
(0, 0), 1)es un conjunto abierto. Es
fácil ver que, en general, B(
(a0, b0), r)
es un abierto, ∀(a0, b0) ∈ R2.
X
Y
3. En R2, el conjunto H = {(x, y) ∈ R2 : y > 0} es abierto. Se conoce como el semiplanosuperior.
X
Y
4. En R3, el conjunto A = {(x, y, z) ∈ R3 : x2 + y2 + z2 < 9} es abierto. Gráficamente, es el
MAT023 (2◦ sem. 2011) 4

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �5
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
interior de una esfera de radio 3 centrada en el origen (sin el borde).
x y
z
5. En R2, los intervalos I1 =]a, b[, I2 =]−∞, b[, I3 =]a,∞[ no son abiertos, porque un subcon-junto de R no puede contener una bola abierta bidimensional.
Definición 1.6. Diremos que el conjunto F ⊆ Rn es cerrado si, y sólo si, Rn − F es abierto.
Ejemplos
1. En R, los intervalos I4, I7 e I8 son conjuntos cerrados, ya que R− I4 = ]−∞, a[ ∪ ]b,∞[,R− I7 =]b,∞[, R− I8 =]−∞, a[ son abiertos.
2. En R2, el conjunto A = {(x, y) ∈ R2 : x2 + y2 ≤ 1} es cerrado, puesA = {(x, y) ∈ R2 : x2 + y2 > 1} es un conjunto abierto. En general, toda bola cerrada esun conjunto cerrado.
3. En R2, el conjunto A = {(x, y) ∈ R2 : x ≥ 0, y ≥ 0} es cerrado. Corresponde, gráficamente, alprimer cuadrante del plano cartesiano, incluyendo el borde.
4. En R3, el conjunto A = {(x, y, z) ∈ R3 : x2 + y2 + z2 = 9} es cerrado, y también lo es elconjunto A = {(x, y, z) ∈ R3 : x2 + y2 + z2 ≤ 9}.
5. Sea −→p ∈ Rn, entonces {−→p } es un conjunto cerrado.
Definición 1.7. Sea A ⊆ Rn; diremos que ~q ∈ Rn es un punto de acumulación de A si y sólosi,
∀ r > 0,(B(~q, r)− {~q}
)∩ A 6= ∅
Denotamos al conjunto de los puntos de acumulación de A como
A′ = {~q ∈ Rn : ~q es punto de acumulación de A}
Ejemplos
1. En R, consideremos el intervalo I =]a, b]. Si x ∈ ]a, b[ entonces (B(x, r) − {x}) ∩ I 6= ∅. Porlo tanto, todos los x ∈ R : a < x < b son puntos de acumulación de I. Además, si x = a,entonces también (B(a, r)− {a}) ∩ I 6= ∅, y si x = b, (B(b, r)− {b}) ∩ I 6= ∅. Hemos probadoentonces que el conjunto de puntos de acumulación de I, I ′ = [a, b].
MAT023 (2◦ sem. 2011) 5

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �6
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
2. Como arriba, el intervalo cerrado [a, b] es el conjunto de puntos de acumulación para lossiguientes intervalos en R : ]a, b[, [a, b[, [a, b].
3. En R, consideremos el conjunto A ={
1n , n ∈ N
}. El único punto de acumulación de A es el
0, es decir, A′ = {0}.
4. En R2, el conjunto de puntos de acumulación de A ={
(x, y) ∈ R2 : x2 + y2 < 1}es el conjunto
A′ ={
(x, y) ∈ R2 : x2 + y2 ≤ 1}.
5. En Rn, el conjunto de pntos de acumulación de Rn −{−→p } es (Rn − {−→p })′ = Rn.
Definición 1.8. Sea A ⊆ Rn. Diremos que x0 es un punto interior de A si, y sólo si, ∃ r > 0 :B(x0, r) ⊆ A. Denotamos al conjunto de todos los puntos interiores de A por Int(A) ó A, y estádado por:
A = {x ∈ Rn : x es un punto interior de A}
Ejemplos
1. En R, el interior del intervalo I = [a, b] es I =]a, b[. El mismo interior tienen los intervalos]a, b[, [a, b[ y ]a, b].
]a, b]
a b
]a, b[
a b
[a, b]
a b
[a, b[
a b
2. En R2, el interior de la bola B((0, 0), 2) es la misma bola.
3. En R2, el interior de H ={
(x, y) ∈ R2 : y ≥ 0}es el semiplano superior.
4. El interior de A ={
(x, y, z) ∈ R3 : x2 + y2 + z2 ≤ 9}es la esfera sin el borde, es decir,
A ={
(x, y, z) ∈ R3 : x2 + y2 + z2 < 9}.
5. En R2, el interior de A ={
(x, y) ∈ R2 : x2 + y2 = 4}
es ∅.
Definición 1.9. Sea A ⊆ Rn; diremos que x0 ∈ Rn es un punto frontera de A si, y sólo si,
∀ ε > 0 : B(x0, ε) ∩ A 6= ∅ ∧ B(x0, ε) ∩ A{ 6= ∅
Denotamos al conjunto de puntos frontera de A por FrA o ∂A.
Definición 1.10. Sea A ⊆ Rn; diremos que x0 ∈ Rn es un punto exterior de A si, y sólo si,x0 ∈ Int(Ac).
MAT023 (2◦ sem. 2011) 6

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �7
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
Ejemplos
1. En R, los puntos frontera del intervalo I = ]a, b] son los puntos a y b. Los mismos puntos sonfrontera para los intervalos ]a, b[, [a, b] y [a, b[.
]a, b]
a b
]a, b[
a b
[a, b]
a b
[a, b[
a b
2. En R2, el conjunto de puntos frontera de A = {(x, y) ∈ R2 : x2 + y2 < 1} es el conjunto∂A = {(x, y) ∈ R2 : x2 + y2 = 1}.
3. En R, el conjunto de puntos frontera de A ={
1n , n ∈ N
}es ∂A = A ∪ {0}.
0 1
12
13
14
15
EjerciciosPara cada uno de los siguientes conjuntos determine si es abierto, cerrado, sus puntos interiores
y de acumulación:(a) R (b) Rn (c) ∅
Definición 1.11. Sea A ⊆ Rn, A 6= ∅. Diremos que A es una región si, y sólo si, A es un conjuntoabierto y conexo, es decir, dados dos puntos cualquiera en A, estos pueden ser unidos por una líneapoligonal.
Ejemplos
1. En R2, la bola B((0, 0), 2) es una región. Cualquier bola es una región en R2.
2. En general, B(x0, r) ⊆ Rn es una región.
3. El semiplano superior es una región.
4. En R2, el anillo abierto A ={
(x, y) ∈ R2 : 1 < x2 + y2 < 4}es una región.
MAT023 (2◦ sem. 2011) 7

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �8
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
Ejercicios
1. En cada uno de los siguientes casos, sea A el conjunto de todos los (x, y) ∈ R2 que satisfacenla desigualdad dada. Grafique el conjunto en cada caso, y determine si es abierto, cerrado, sies una región, sus puntos interiores, frontera y de acumulación.
a) 3x2 + 2y2 < 6
b) |x| < 1 ∧ |y| < 1
c) |x| ≤ 1 ∧ |y| ≤ 1
d) 1 < x ≤ 2
e) 1 ≤ x ≤ 2 ∧ 3 < y < 4
f ) y > x2 ∧ |x| < 2
g) y ≥ x2 ∧ |x| < 2
h) (x2 + y2 − 1)(4− x2 − y2) > 0
i) y = x2
j ) y ≥ x2
k) y ≥ x2 ∧ |x| < 2
l) y ≥ x2 ∧ |x| ≤ 2
2. En cada uno de los siguientes casos, sea A el conjunto de todos los (x, y, z) ∈ R3 que satisfacenla desigualdad dada. Grafique el conjunto en cada caso, y determine si es abierto, cerrado, sies una región, sus puntos interiores, exteriores, frontera y de acumulación.
a) z2 − x2 − y2 − 1 > 0
b) |x| < 1 , |y| < 1 ∧ |z| < 1
c) |x| ≤ 1 , |y| < 1 ∧ |z| < 1
d) x+ y + z < 1
e) x+ y + z < 1 , x > 0, y > 0, z > 0
f ) x2 +4y2 +4z2−2x+16y+40z+113 < 0
3. Si I1 e I2 son dos intervalos abiertos en R, pruebe que I1 ∪ I2 e I1 ∩ I2 son abiertos.
4. Si I1 e I2 son dos intervalos cerrados en R, pruebe que I1 ∪ I2 e I1 ∩ I2 son cerrados.
5. Si A es un abierto en Rn y x ∈ A, pruebe que el conjunto A− {x} es un abierto.
6. Si A es un cerrado en Rn y x 6∈ A, pruebe que el conjunto A ∪ {x} es un cerrado.
7. Pruebe que la unión arbitraria de conjuntos abiertos es abierto.
8. Pruebe que la intersección finita de conjuntos abiertos es abierto. ¿Qué puede decir de laintersección arbitraria de conjuntos abiertos?
9. Pruebe que la intersección arbitraria de conjuntos cerrados es cerrado.
10. Pruebe que la unión finita de conjuntos cerrados es cerrado. ¿Qué puede decir de la uniónarbitraria de conjuntos cerrados?
MAT023 (2◦ sem. 2011) 8
Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �9
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
2. Funciones Reales de Varias Variables
2.1. Funciones escalares de Varias Variables
En esta sección, estudiaremos funciones que tienen como dominio un subconjunto A de Rn yrecorrido en los reales, es decir,
f : A ⊆ Rn → R.
Ejemplos:
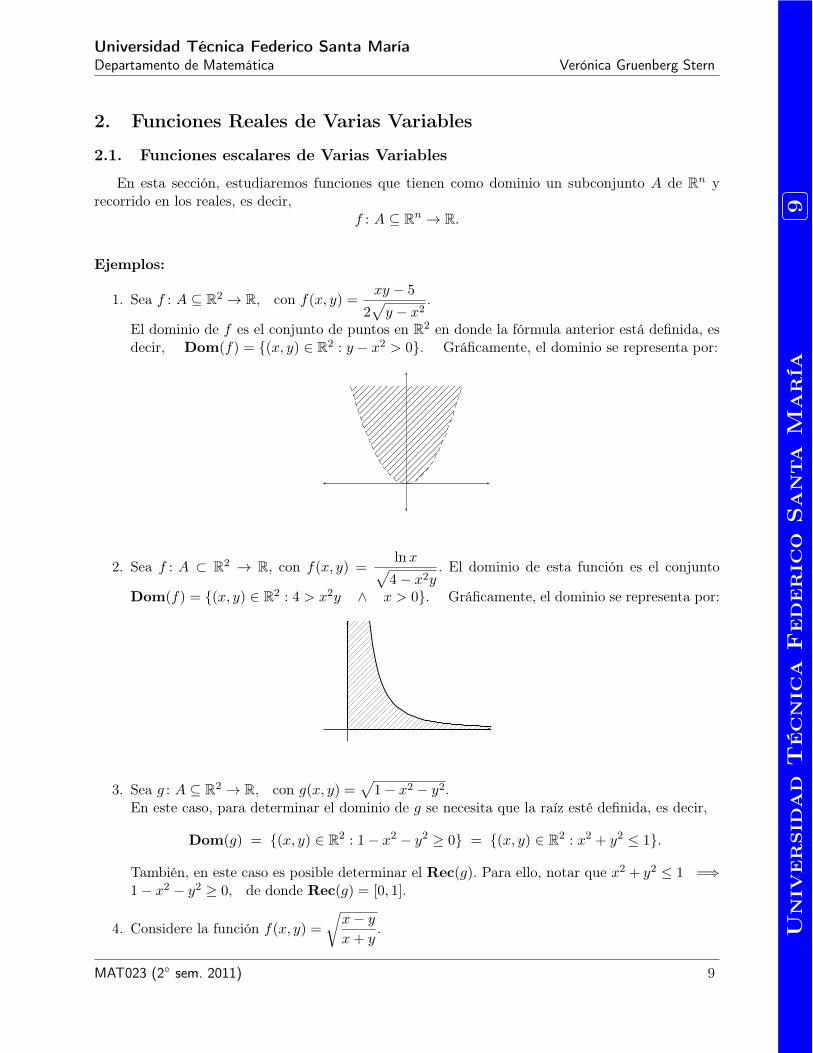
1. Sea f : A ⊆ R2 → R, con f(x, y) =xy − 5
2√y − x2
.
El dominio de f es el conjunto de puntos en R2 en donde la fórmula anterior está definida, esdecir, Dom(f) = {(x, y) ∈ R2 : y − x2 > 0}. Gráficamente, el dominio se representa por:
2. Sea f : A ⊂ R2 → R, con f(x, y) =lnx√
4− x2y. El dominio de esta función es el conjunto
Dom(f) = {(x, y) ∈ R2 : 4 > x2y ∧ x > 0}. Gráficamente, el dominio se representa por:
3. Sea g : A ⊆ R2 → R, con g(x, y) =√
1− x2 − y2.En este caso, para determinar el dominio de g se necesita que la raíz esté definida, es decir,
Dom(g) = {(x, y) ∈ R2 : 1− x2 − y2 ≥ 0} = {(x, y) ∈ R2 : x2 + y2 ≤ 1}.
También, en este caso es posible determinar el Rec(g). Para ello, notar que x2 + y2 ≤ 1 =⇒1− x2 − y2 ≥ 0, de donde Rec(g) = [0, 1].
4. Considere la función f(x, y) =
√x− yx+ y
.
MAT023 (2◦ sem. 2011) 9

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
10
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
a) Determine y grafique el dominio de f .
b) ¿Es el dominio de f un conjunto abierto?
c) Determine la frontera del dominio de f y sus puntos de acumulación.
Solución:
a) Para determinar el dominio de f , necesitamos que la cantidad subradical sea positiva:
Dom(f) =
{(x, y) ∈ R2 :
x− yx+ y
≥ 0
}= {(x, y) ∈ R2 : x− y ≥ 0 ∧ x+ y > 0}⋃{(x, y)R2 : x− y ≤ 0 ∧ x+ y < 0}
= {(x, y) ∈ R2 : x ≥ y ∧ x > −y}⋃{(x, y) ∈ R2 : x ≤ y ∧ x < −y}b) El Dom(f) no es un conjunto abierto.
Basta tomar, por ejemplo, el punto p = (1, 1) y un radio cualquiera r ∈ R para que labola abierta B(p, r) no esté contenida en el dominio de f .
c) Frontera de Dom(f)={(x, y) ∈ R2 : y = x}⋃{(x, y) ∈ R2 : y = −x}
Los puntos de acumulación del Dom(f) forman el conjunto
{(x, y) ∈ R2 : x ≥ y ∧ x ≥ −y}⋃{(x, y) ∈ R2 : x ≤ y ∧ x ≤ −y}
Definición 2.1. Sea f : A ⊆ Rn → R una función, donde Dom(f) = A, y tal que
(x1, x2, · · · , xn) −→ f(x1, x2, · · · , xn).
Definimos el gráfico de f como el conjunto
Gf = {(x1, x2, · · · , xn, f(x1, x2, · · · , xn)) ∈ Rn+1 : (x1, x2, · · · , xn) ∈ A}
Es decir, el gráfico de una función de n variables es un subconjunto de Rn+1, por lo cual sólopodemos dibujar los gráficos de funciones de 1 ó 2 variables.
1. Sea f : A ⊆ R2 → R, con f(x, y) = e−(x2+y2). En este caso, f está bien definida para todos
los valores de R2, de donde Dom(f) = R2 ¿Será posible determinar el Rec(f)? Notar quex2+y2 ≥ 0, ∀ (x, y) ∈ R2. Luego, como el exponente tiene signo negativo, tenemos que el valormáximo lo obtenemos para (x, y) = (0, 0), y los valores de la función decrecen a medida quex2 + y2 crece. Por tanto, Rec(f) =]0, 1].
El gráfico de z = f(x, y) es:
x y
z
MAT023 (2◦ sem. 2011) 10

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
11
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
2. Sea f : A ⊆ R2 → R, con f(x, y) = senxy. Nuevamente, f está bien definida para todoslos valores de R2, de donde Dom(f) = R2. Como ∀u ∈ R : −1 ≤ senu ≤ 1, es claroque Rec(f) = [−1, 1].
Para poder relacionar cuerpos, superficies y curvas en el espacio con sus correspondientes ecua-ciones cartesianas, es recomendable aprovechar el conocimiento algebraico de ecuaciones (y sus co-rrespondientes representaciones gráficas) en el plano y en el espacio, conseguido en cursos anteriores.
Por ello, comenzaremos recordando brevemente las ecuaciones canónicas y correspondientes grá-ficas de las cónicas, en el plano.
Recta1 2−1−2
1
2
−1
y = mx+ n
Circunferencia x2 + y2 = r2
Elipsex2
a2+y2
b2= 1
Parábola y =1
4px2
Hipérbolax2
a2− y2
b2= 1
Figura 1: Algunos gráficos.
MAT023 (2◦ sem. 2011) 11

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
12
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
De cursos pasados, sabemos que estas cónicas pueden encontrarse trasladadas y/o rotadas en elplano. En ese caso, la forma de la ecuación es una «cuádrica», es decir, de la forma
Ax2 +B y2 + Cxy +Dx+ E y + F = 0
y que mediante traslaciones y rotaciones es posible llevarlas a una de las formas anteriores.
Análogamente las «superficies cuádricas», es decir, superficies con ecuación de la forma
Ax2 +B y2 + C z2 +Dxy + E yz + F xz +Gx+H y + I z + J = 0
representan superficies en el espacio tridimensional, y es posible demostrar, usando traslaciones yrotaciones, que se obtiene alguna de las siguientes «formas canónicas»:
Ax2 +By2 + Cz2 +D = 0(1)
Ax2 +By2 + Cz = 0(2)
Generalicemos al espacio, en primer lugar, las gráficos de la figura 1. Notar que una mismaecuación representa figuras geométricas diferentes, dependiendo del espacio en que se encuentreésta.
MAT023 (2◦ sem. 2011) 12

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
13
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
Ecuación Gráfico en R2 Gráfico en R3
(a) y = mx+ n1 2−1−2
1
2
−1
x
y
z
•
•
(b) x2 + y2 = r2
y
z
x
(c) x2
a2+ y2
b2= 1
y
z
x
(d) y = cx2
y
z
x
Figura 2: Representaciones en R2 y R3
Sabemos, sin embargo, que hay otras superficies cuádricas. Las más relevantes son las siguientes:
1. Esfera :
x2 + y2 + z2 = r2
2. Elipsoide :
x2
a2+y2
b2+z2
c2= 1 a, b, c > 0
-2-1
-2-2
-1
-10
0
x
z
1
y
0
2
11
22
MAT023 (2◦ sem. 2011) 13
Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
14
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
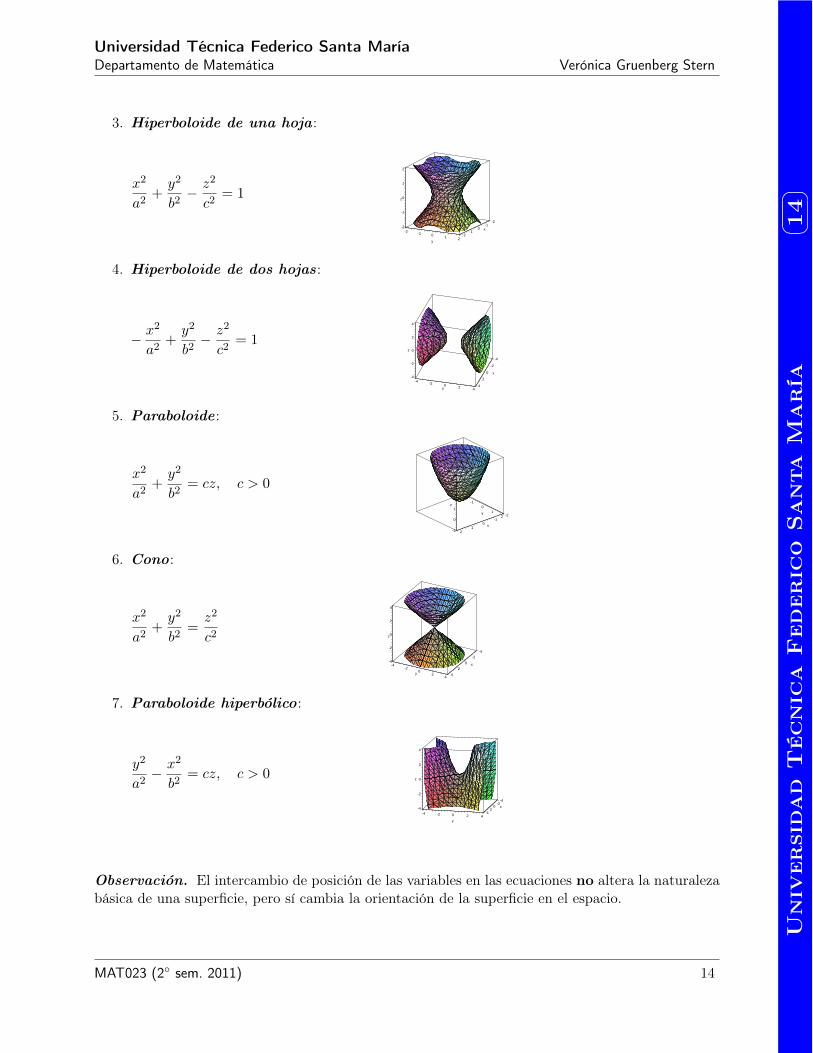
3. Hiperboloide de una hoja :
x2
a2+y2
b2− z2
c2= 1
-2-1
-2-2 0
-1
x-1
0
y
z
1
01
2
1 22
4. Hiperboloide de dos hojas:
− x2
a2+y2
b2− z2
c2= 1
-4
-2
0 x-4
-42
-2
-2
0 2
z
y
0
44
2
4
5. Paraboloide :
x2
a2+y2
b2= cz, c > 0
-2-1
y
01
2 -2-1
0 x1-1 2
0
1
2
z
3
4
6. Cono:
x2
a2+y2
b2=z2
c2-4
-2
-4-4 0 x
-2
-2
02
0z
y 2
2
44
4
7. Paraboloide hiperbólico:
y2
a2− x2
b2= cz, c > 0
-4-2
0 x2-4
-4
-2
-2
z
y
0
0
2
2
4
44
Observación. El intercambio de posición de las variables en las ecuaciones no altera la naturalezabásica de una superficie, pero sí cambia la orientación de la superficie en el espacio.
MAT023 (2◦ sem. 2011) 14

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
15
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
Ejercicios. Grafique en R3 las siguientes:
1. y = x2 + z2
2. y = x2 − z2
3. 2x2 − 4y2 + z2 = 0
4. −2x2 + 4y2 + z2 = −36
5. z = |x|
2.2. Funciones Vectoriales
En esta sección, estudiaremos funciones que tienen como dominio un subconjunto A de Rn yrecorrido en Rm, es decir,
f : A ⊆ Rn −→ Rm.
Ejemplos:
1. T : R2 −→ R3 tal que T (x, y) = (2x− 3y, x+ y, x− y).
2.−→F : R2 −→ R2, tal que
−→F (x, y) = (senx, y)
3.−→F : R2 − {(0, 0)} −→ R2, tal que
−→F (x, y) = (f1(x, y), f2(x, y)), donde
f1(x, y) =xy
x2 + y2, f2(x, y) = x cos y.
2.3. Curvas y Superficies de Nivel
Definición 2.2. Sea f : A ⊆ R2 −→ R. Para cada z0 ∈ Rec(f) definimos la correspondiente curvade nivel como el conjunto
Cz0 = {(x, y) ∈ A : f(x, y) = z0}
Observación. En otras palabras, si f es una función de dos variables, las intersecciones de Gf conplanos paralelos al plano XY (o sea, planos en los que z = z0 =cte.), se llaman curvas de nivel ode contorno (muy usadas en mapas topográficos, hidrográficos, meteorológicos, etc.)
Ejemplos.
1. Sea f : A ⊆ R2 → R, f(x, y) = 9−x2−y2 donde A = {(x, y) ∈ R2 : x2+y2 ≤ 9}. Entonces,las curvas de nivel se obtienen al hacer z = f(x, y) = k =cte. Para distintos valores de laconstante k, obtenemos circunferencias de diferentes radios. Por ejemplo, si k = 0, obtenemosla circunferencia centrada en el origen y de radio 3. Si k = 5, obtenemos la circunferenciacentrada en el origen de radio 2, y así sucesivamente.
MAT023 (2◦ sem. 2011) 15

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
16
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
X
Y
k = 5
k = 8
2. Determine las curvas de nivel de f(x, y) =x2 − y2x2 + y2
.
Claramente, Domf = R2 − {(0, 0)}. Suponemos que f(x, y) =x2 − y2x2 + y2
= k, de donde:
x = 0 =⇒ f(0, y) = −1 ∴ sobre el eje OY la función tiene el valor constante −1.
x 6= 0 : x2− y2 = k(x2 + y2) =⇒ x2(1−k) = y2(1 +k) =⇒ y2
x2=
1− k1 + k
, k 6= −1
Esta última igualdad tiene sentido si1− k1 + k
≥ 0. Para estos valores, las curvas de nivel
son las rectas, excluyendo el origen, y = ax ∧ y = −ax , donde a =
√1− k1 + k
.
Análogamente:
y = 0 =⇒ f(x, 0) = 1 ∴ sobre el eje OX la función tiene el valor constante 1.
y 6= 0 : x2 − y2 = k(x2 + y2) =⇒ x2(1− k) = y2(1 + k) =⇒ x2
y2=
1 + k
1− k , k 6= 1
Si f es una función de 3 variables, es decir, f : A ⊆ R3 → R, el análogo a las curvas de nivel def son las gráficas de f(x, y, z) = k =cte., y por lo tanto en lugar de curvas lo que obtenemos sonsuperficies de nivel .
Definición 2.3. Sea f : A ⊆ R3 −→ R. Para cada w0 ∈ Rec(f) definimos la correspondientesuperficie de nivel como el conjunto
Cw0 = {(x, y, z) ∈ A : f(x, y, z) = w0}
MAT023 (2◦ sem. 2011) 16

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
17
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
Observación. Es posible generalizar el concepto de superficies de nivel, considerando funcionesde Rn a Rm. Más precisamente, si
F : A ⊆ Rn −→ Rm, F (x1, x2, · · · , xn) = (f1(~x), f2(~x), · · · , fm(~x)),
para cada ~b ∈ Rec(F ) definimos la correspondiente superficie de nivel como el conjunto
C~b = {~x ∈ A : F (~x) = ~b}
Ejemplos
Determine las superficies de nivel de f , si
1. f : R3 −→ R, dada por f(x, y, z) = x2 + y2 + z2.
2. f : R3 −→ R, dada por f(x, y, z) = x2 + y2 − z2.
3. Dada la función f(x, y) =
√x− yx+ y
a) Determine y grafique el dominio de f .
b) ¿Es el dominio de f un conjunto abierto?
c) Determine la frontera del dominio de f y sus puntos de acumulación.
d) Determine las curvas de nivel f(x, y) = c, y grafique para c = 0, c = 1, c =1
2, c = 2.
e) Analice que sucede cuando c crece indefinidamente.
Solución
1. Como x2 + y2 + z2 ≥ 0 ∀(x, y, z) ∈ R3, se tiene que:
a) w < 0 ⇒ Cw = ∅.
b) w = 0 ⇒ Cw = {(0, 0, 0)}.
c) w > 0 ⇒ Cw = {x2 + y2 + z2 = w}, es decir, esferas de centro en ~0 y radio√w.
2. Tenemos los siguientes tres casos:
MAT023 (2◦ sem. 2011) 17

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
18
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
Caso I) x2 + y2 − z2 = 0
-4
-2
-4-4 0 x
-2
-2
02
0z
y 2
2
44
4
Caso II) x2 + y2 − z2 > 0
-2-1
-2-2 0
-1
x-1
0
y
z
1
01
2
1 22
Caso III) x2 + y2 − z2 < 0
-4
-2
0 x-4
-42
-2
-2
0 2
z
y
0
44
2
4
3. a) Necesitamos que la cantidad subradical sea positiva, y que el denominador no se anule.Luego:
Dom(f) = {(x, y) ∈ R2 :x− yx+ y
≥ 0}
= {(x, y) ∈ R2 : x− y ≥ 0 ∧ x+ y > 0}⋃{(x, y)R2 : x− y ≤ 0 ∧ x+ y < 0}
= {(x, y) ∈ R2 : x ≥ y ∧ x > −y}⋃{(x, y) ∈ R2 : x ≤ y ∧ x < −y}b) El Dom(f) no es un conjunto abierto.
Basta tomar, por ejemplo, el punto p = (1, 1) y un radio cualquiera r ∈ R para que labola abierta B(p, r) no esté contenida en el dominio de f .
c) Frontera de Dom(f)={(x, y) ∈ R2 : y = x}⋃{(x, y) ∈ R2 : y = −x}Los puntos de acumulación del Dom(f) forman el conjunto
{(x, y) ∈ R2 : x ≥ y ∧ x ≥ −y}⋃{(x, y) ∈ R2 : x ≤ y ∧ x ≤ −y}d) Estudiemos la situación general en primer lugar:
f(x, y) = c ⇔√x− yx+ y
= c
⇔ x− yx+ y
= c2
⇔ y =
(1− c21 + c2
)x
MAT023 (2◦ sem. 2011) 18

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
19
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
Es decir, ∀c ∈ R, las curvas de nivel son rectas que pasan por el origen. En particular:
Si c = 0, la curva de nivel es la recta y = x.Si c = 1, la curva de nivel es la recta y = 0.
Si c =1
2, la curva de nivel es la recta y =
3
5x.
e) Como lımc→∞
(1− c21 + c2
)= −1, quiere decir que cuando c crece indefinidamente las curvas
de nivel tienden a la recta y = −x.
Ejercicios
1. Determine y grafique A ⊆ R2 tal que sea el dominio de:
(a) f(x, y) =√
36− x2 − y2
(b) f(x, y) =
√x2 + y2 − 16
x
(c) f(x, y) =x+ 1
|y − 1|2. Describa las curvas de nivel correspondientes a los valores de f(x, y) = C, que se indican, para
las superficies:
(a) f(x, y) = x2 − y2, C = 0, 1, 4, 9
(b) f(x, y) = cos(x+ y), C = −1, 0, 12 , 1
3. Determine varias curvas de nivel de la función definida por f(x, y) =x2 + y2
y2.
4. Sea f(x, y) =
√x+ y2
y2.
a) Determine y grafique Dom(f).
b) Escriba la ecuación de la curva de nivel que contenga al punto (3,1). Grafique la curva.
5. Sea f : R2 → R definida por:f(x, y) = mın{|x|, |y|}.
Bosqueje las curvas de nivel de la función f(x, y).
6. Sea f : R2 → R definida por:
f(x, y) = mın{|x+ y|, |x− y|}.
Bosqueje las curvas de nivel de la función f(x, y).
MAT023 (2◦ sem. 2011) 19

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
20
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
7. Sea f(x, y) =
x2
x− y si x 6= y
0 si x 6= y
Determine las curvas de nivel si: (i) f(x, y) = 1, (ii) f(x, y) = 2.
8. Sea f : R2 −→ R2, dada por f(s, t) = (s2 + t2, 2st). Encuentre la imagen del círculos2 + t2 ≤ a2.
9. Sea f : R2 −→ R3, dada por f(u, v) = (v cos 2πu, v sen 2πu, 1 − v). Determine la imagende R2, y la imagen del cuadrado 0 ≤ u ≤ 1, 0 ≤ v ≤ 1.
MAT023 (2◦ sem. 2011) 20

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
21
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
3. Límites y Continuidad
Tal como en el caso de funciones de una variable, si f : A ⊆ Rn → R es una función de nvariables, y x0 ∈ Rn es un punto de acumulación de A, diremos que el límite de f cuando x seacerca a x0 es L ∈ R si la diferencia |f(x)−L| puede hacerse arbitrariamente pequeña, si se escogex suficientemente cerca de x0.
En otras palabras, si f es una función que está definida en alguna bola abierta B(x0, r) excepto,posiblemente en x0 (es decir, x0 es un punto de acumulación del Dom(f)), entonces
lımx→x0
f(x) = L ⇐⇒ ∀ ε > 0 ∃ δ > 0 : 0 < d(x,x0) < δ =⇒ |f(x)− L| < ε
Observación. Es usual llamar vecindad reducida ó bola reducida centrada en x0 a la bolaB(x0, r) sin el punto x0.
Ejemplos
Demuestre que:
1. lım(x,y)→(1,3)
2x+ 3y = 11.
2. lım(x,y)→(1,2)
5x− 3y = −1.
3. lım(x,y)→(0,1)
4x+ y2 = 1.
4. lım(x,y)→(1,2)
4x2 + y = 6.
5. lım(x,y)→(0,0)
x2y2
x2 + y2= 0.
6. lım(x,y)→(0,0)
xyx2 − y2x2 + y2
= 0.
7. lım(x,y)→(4,1)
3x+ 2y = 14.
8. lım(x,y)→(1,1)
x
y= 1.
Solución
1. Probar que lım(x,y)→(1,3)
2x + 3y = 11 requiere demostrar que dado cualquier ε > 0 es
posible encontrar un δ > 0 de modo que si la distancia entre (x, y) y (1, 3) es menor que δ,
es decir, si 0 <√
(x− 1)2 + (y − 3)2 < δ entonces |2x+ 3y − 11| < ε.
Notemos que:|2x+ 3y − 11| = |2(x− 1) + 3(y − 3)|
≤ 2|x− 1|+ 3|y − 3| (por la desigualdad triangular)
≤ 2√
(x− 1)2 + (y − 3)2 + 3√
(x− 1)2 + (y − 3)2
(pues |x−1| ≤√
(x− 1)2 + (y − 3)2 e |y−3| ≤√
(x− 1)2 + (y − 3)2 )
≤ 5√
(x− 1)2 + (y − 3)2 < 5δ
MAT023 (2◦ sem. 2011) 21

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
22
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
Si esta última expresión es menor que ε, se tendrá, por transitividad, que |2x+ 3y−11| < ε.
Luego, para lograr lo que queremos demostrar, basta escoger δ ≤ ε5 .
2. Análogamente, lım(x,y)→(1,2)
5x− 3y = −1 ⇐⇒
∀ ε > 0 ∃ δ > 0 : 0 <√
(x− 1)2 + (y − 2)2 < δ =⇒ |5x− 3y + 1| < ε
Como antes:
|5x− 3y + 1| = |5(x− 1)− 3(y − 2)| ≤ 5|x− 1|+ 3|y − 2| ≤
≤ 8√
(x− 1)2 + (y − 2)2 < 8δ.
Luego, para que esto sea menor que ε, basta tomar δ ≤ ε8 .
3. lım(x,y)→(0,1)
4x+ y2 = 1 ⇐⇒
∀ ε > 0 ∃ δ > 0 : 0 <√x2 + (y − 1)2 < δ =⇒ |4x+ y2 − 1| < ε
Ahora, |4x+ y2 − 1| = |4x+ (y + 1)(y − 1)| ≤ 4|x|+ |y + 1| |y − 1| (desig. triangular)
Como antes, sabemos que |x| ≤√x2 + (y − 1)2 y |y − 1| ≤
√x2 + (y − 1)2.
Debemos acotar |y + 1|. Para ello, suponemos que δ1 = 1. Luego:
|y − 1| ≤√x2 + (y − 1)2 ≤ 1 (= δ1) de donde |y − 1| ≤ 1
⇐⇒ −1 < y − 1 < 1 ⇐⇒ 1 < y + 1 < 3 de donde |y + 1| < 3
Luego:
4|x|+ |y + 1| |y − 1| ≤ 4√x2 + (y − 1)2 + 3
√x2 + (y − 1)2 ≤ 7
√x2 + (y − 1)2 < 7 δ2
Para que lo anterior sea menor que ε, escogemos δ2 ≤ ε7 (usamos δ2 porque ya escogimos
un δ1 = 1). ¿Cuál δ, (δ1 ó δ2) será el apropiado para demostrar este límite?
Basta considerar δ = min{δ1, δ2} = min{1, ε7}.
4. Dejamos 4., 7. y 8. como ejercicio al lector. Demostramos ahora:
5. Para probar que lım(x,y)→(0,0)
x2y2
x2 + y2= 0, acotamos
MAT023 (2◦ sem. 2011) 22

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
23
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
∣∣∣∣ x2y2
x2 + y2− 0
∣∣∣∣ =
∣∣∣∣ x2y2
x2 + y2
∣∣∣∣ ≤ ∣∣∣∣x2y2x2
∣∣∣∣ = |y2| ≤ (√x2 + y2)2 < δ2
Escogemos δ =√ε.
6. Para probar que lım(x,y)→(0,0)
xyx2 − y2x2 + y2
= 0, acotamos∣∣∣∣xyx2 − y2x2 + y2− 0
∣∣∣∣ =
∣∣∣∣xy x2 − y2x2 + y2
∣∣∣∣ ≤ |xy| ≤ (√x2 + y2)2 < δ2
Escogemos δ =√ε.
Ejemplos.
1. Sea f(x, y) =
{(x+ y) sen 1
x si x 6= 00 si x = 0
Conjeture el lım(x,y)→(0,0)
f(x, y), y demuestre su conjetura.
2. Sea f(x, y) =
{2xy si (x, y) 6= (3,−1)0 si (x, y) = (3,−1)
Conjeture el lım(x,y)→(3,−1)
f(x, y), y demuestre su conjetura.
Solución
1. Notamos que | sen 1x | ≤ 1, y que x+y → 0 si (x, y) → (0, 0). Podemos conjeturar
que lım(x,y)→(0,0)
f(x, y) = 0.
Caso 1 : Si x = 0 : |f(x, y)− 0| = |0− 0| = 0
Caso 2 : Si x 6= 0 : |f(x, y)− 0| = |(x+ y) sen 1x | ≤ |x+ y| ≤ |x|+ |y| ≤ 2
√x2 + y2 < 2δ
por lo tanto, escogemos δ =ε
2.
2. Notamos que en la medida en que x → 3 e y → −1, el valor de 2xy → 2 · 3 · (−1) = −6.Así, podemos conjeturar que lım
(x,y)→(3,−1)f(x, y) = −6.
Demostraremos este límite como antes:
|2xy − (−6)| = 2|(x− 3)(y + 1)− x+ 3y + 6| = 2|(x− 3)(y + 1)− (x− 3) + 3(y + 1)|
≤ 2(|(x− 3)(y + 1)|+ |(x− 3)|+ 3|(y + 1)|
)
MAT023 (2◦ sem. 2011) 23

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
24
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
≤ 2(
(√
(x− 3)2 + (y + 1)2)2 +√
(x− 3)2 + (y + 1)2 + 3√
(x− 3)2 + (y + 1)2)
≤ 2(δ2 + 4δ) < ε para lo que basta tomar δ =
√1 +
ε
4− 1
Notemos que lım(x,y)→(3,−1)
f(x, y) 6= f(3,−1) ya que f(3,−1) = 0. De hecho, el límite de
esta función igualmente sería −6, aunque la función no estuviese definida en (3,−1).
Para que el lım(x,y)→(x0,y0)
f(x, y) exista, este valor debe ser independiente del camino escogido para
aproximarse a (x0, y0). Es decir:
Proposición 1. Si lımx→x0
f(x) = L1 y lımx→x0
f(x) = L2, entonces L1 = L2.
La proposición anterior dice que si el límite de una función en un punto existe, este límite esúnico. En otras palabras, si una función tiene diferentes límites cuando x→ x0 a través de conjuntosdiferentes de puntos (distintos caminos), entonces lım
x→x0
f(x) no existe.
Luego, a pesar de no tener aún de un método para calcular límites de varias variables, disponemosde un criterio que nos permite demostrar que algunos límites no existen.
Ejemplos
Determine si existen o no los siguientes:
1. lım(x,y)→(0,0)
xy
x2 + y2.
2. lım(x,y)→(0,0)
x4y4
(x2 + y4)3.
3. lım(x,y)→(0,0)
ax+ by
(cx+ dy).
4. lım(x,y)→(0,0)
x2y
x4 + y4.
5. lım(x,y)→(0,0)
x4y
x6 + y3.
6. lım(x,y)→(0,0)
x3 + y3
x2 + y.
7. lım(x,y,z)→(0,0,0)
xy − z2x2 + y2 + z2
.
Solución
1. Para determinar si lım(x,y)→(0,0)
xy
x2 + y2existe, buscaremos diferentes maneras ó caminos
para aproximarnos al punto de acumulación (0,0).
Si y = x, entonces lım(x,y)→(0,0)
xy
x2 + y2= lım
x→0
x2
2x2=
1
2
Si y = −x, entonces lım(x,y)→(0,0)
xy
x2 + y2= lım
x→0
−x22x2
= −1
2
Como ambos valores son diferentes, lım(x,y)→(0,0)
xy
x2 + y2no existe.
MAT023 (2◦ sem. 2011) 24

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
25
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
En lugar de escoger, arbitrariamente, las 2 rectas anteriores, podríamos haber tomado unarecta genérica, de la forma: y = mx.
Entonces lım(x,y)→(0,0)
xy
x2 + y2= lım
x→0
mx2
x2(1 +m2)=
m
1 +m2
Así, observamos que el valor del límite depende de la pendiente de la recta por la cual nosacercamos, es decir, no sería único. Luego, no existe.
2. Para determinar si lım(x,y)→(0,0)
x4y4
(x2 + y4)3existe, nos aproximamos a (0,0) mediante una
recta genérica y = mx. Así:
lım(x,y)→(0,0)
x4y4
(x2 + y4)3= lım
x→0
m4x8
(x2 + (mx)4)3= lım
x→0
m4x8
x6 (1 +m4x2)3= 0
Sin embargo, si nos aproximamos por la parábola x = y2:
lım(x,y)→(0,0)
x4y4
(x2 + y4)3= lım
y→0
y12
(2y4)3=
1
8.
Este valor no coincide con el valor al aproximarnos por rectas. Luego, el límite no existe.
3. Desarrollaremos el número 6., dejando los demás como ejercicio. Para determinar un posiblecandidato a límite para el ejemplo, consideramos rectas genéricas y = mx, de donde:
lım(x,y)→(0,0)
x3 + y3
x2 + y= lım
x→0
x3 +m3x3
x2 +mx= lım
x→0
x2(1 +m3)
x+m= 0
Pero si consideramos la curva que pasa por el origen y = x3 − x2, obtenemos:
lım(x,y)→(0,0)
x3 + y3
x2 + y= lım
x→0
x3 + (x3 − x2)3x2 + x3 − x2 = lım
x→01 + (x2 − x)3 = 1
Por lo tanto, este límite no existe.
Entre todas las aproximaciones posibles a un punto x0 ∈ R2, existe una forma distinguida,llamada límites iterados y que definimos a continuación.
Definición 3.1. Llamamos límites iterados de f(x, y) a los siguientes caminos que permitenobtener un candidato a límite:
lımx→x0
(lımy→y0
f(x, y)
)y lım
y→y0
(lımx→x0
f(x, y)
)Observación
Si los límites iterados coinciden, ello no significa necesariamente que el límite de una funciónen un punto exista.
MAT023 (2◦ sem. 2011) 25

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
26
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
x0
y0
x0
y0
Si los límites iterados difieres, entonces el límite no existe.
La figura muestra la forma de los caminos que producen los límites iterados.
Ejemplos
1. Determine, si existe, lım(x,y)→(0,0)
x2 − y2x2 + y2
2. Determine, si existe, lım(x,y)→(0,1)
arctany
x
Solución
1. Como lımx→0
lımy→0
x2 − y2x2 + y2
= 1 y lımy→0
lımx→0
x2 − y2x2 + y2
= −1, tenemos que lım(x,y)→(0,0)
x2 − y2x2 + y2
no existe.
2. En este caso: lımx→0+
lımy→1
arctany
x=
π
2y lım
x→0−lımy→1
arctany
x= −π
2. Luego, lım
(x,y)→(0,1)arctan
y
xtampoco existe.
3.1. Algebra de Límites
Sea ~x0 ∈ Rn punto de acumulación para f, g : A ⊆ Rn → R. Entonces, si
lım~x→~x0
f(~x) = L1 y lım~x→~x0
g(~x) = L2, se tiene:
1. lım~x→~x0
(f(~x)± g(~x)) = L1 ± L2
2. lım~x→~x0
cf(~x) = cL1, ∀ c ∈ R
3. lım~x→~x0
f(~x) g(~x) = L1L2
4. Si L2 6= 0, lım~x→~x0
f(~x)
g(~x)=L1
L2
5. Si f(~x) ≥ 0 ∀~x ∈ A, lım~x→~x0
f(~x) ≥ 0
6. Si f(~x) ≥ 0 ∀~x ∈ D ⊂ A,
lım~x→~x0
√f(~x) =
√lım
~x→~x0
f(~x)
MAT023 (2◦ sem. 2011) 26

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
27
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
Teorema 1 (del acotamiento). Si lım~x→~x0
f(~x) = L = lım~x→~x0
g(~x) y si f ≤ h ≤ g en una bola
reducida de centro ~x0, que denotamos por V , es decir, una bola B(~x0, r) a la cual le quitamos elpunto ~x0, entonces lım
~x→~x0
h(~x) = L.
Ejemplos
En los primeros 3 ejemplos, el álgebra permite calcular los límites como si fuesen en una variable.El cuarto ejemplo hace uso del teorema anterior, y el quinto usa ambos.
1. lım(x,y)→(1,0)
xy2 − y2 + x− 1
x− 1= lım
(x,y)→(1,0)
(x− 1)(y2 + 1)
x− 1= 1
2. lım(x,y)→(0,0)
senx sen y
senxy= lım
(x,y)→(0,0)
senx sen y
xy
xy
senxy= 1
3. lım(x,y)→(0,0)
6(1− cosxy)
x2y sen 2y= lım
(x,y)→(0,0)
6(1− cos2 xy)
x2y sen 2y(1 + cosxy)=
= lım(x,y)→(0,0)
6y sen2 xy
x2y2 sen 2y(1 + cosxy)= lım
(x,y)→(0,0)
3
1 + cosxy=
3
2
4. lım(x,y)→(0,0)
xy√x2 + y2
. Para calcular este límite, notemos que
0 ≤ lım(x,y)→(0,0)
|xy|√x2 + y2
≤ lım(x,y)→(0,0)
(√x2 + y2)2√x2 + y2
= lım(x,y)→(0,0)
√x2 + y2 = 0
Luego, lım(x,y)→(0,0)
|xy|√x2 + y2
= 0, de donde lım(x,y)→(0,0)
xy√x2 + y2
= 0
5. lım(x,y)→(0,0)
xy sen(y3)
x4 + y4= lım
(x,y)→(0,0)
xy4
x4 + y4· sen(y3)
y3
= lım(x,y)→(0,0)
xy4
x4 + y4· lım(x,y)→(0,0)
sen(y3)
y3= 0 · 1 = 0
En efecto: 0 ≤∣∣∣∣ xy4
x4 + y4
∣∣∣∣ ≤ |x| y lım(x,y)→(0,0)
|x| = 0 .
3.2. Continuidad
Definición 3.2. Diremos que f : A ⊆ Rn −→ R es continua en ~x0 ∈ A si, y sólo si,
1. f(~x) está definida en una vecindad de ~x0
2. lım~x→~x0
f(~x) = L
MAT023 (2◦ sem. 2011) 27

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
28
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
3. f(~x0) = L
Observación. En muchos textos, se dice que f : A ⊆ Rn −→ R es continua en ~x0 ∈ A si, ysólo si, lım
~x→~x0
f(~x) = f(~x0). Aquí hemos preferido enfatizar todos los aspectos involucrados en la
definición de este concepto.
Ejemplos
1. Probar que
f(x, y) =
xyx2 − y2x2 + y2
, (x, y) 6= (0, 0)
0, (x, y) = (0, 0)
es continua en (0, 0).
a) f(x, y) está definida en (0, 0) y en una vecindad de él.
b) Veamos que lım(x,y)→(0,0)
xyx2 − y2x2 + y2
= 0.∣∣∣∣xyx2 − y2x2 + y2− 0
∣∣∣∣ =
∣∣∣∣xyx2 − y2x2 + y2
∣∣∣∣ ≤ |xy| ≤ (√x2 + y2)2
= x2 + y2 < ε
Por lo tanto, basta tomar δ ≤ √ε
c) f(0, 0) = 0 = lım(x,y)→(0,0)
f(x, y).
Luego, f es continua en (0, 0)
2. Estudiar la continuidad en el origen de
f(x, y) =
x2 − y2x2 + y2
, (x, y) 6= (0, 0)
0, (x, y) = (0, 0)
Usando límites iterados:
lımx→0
(lımy→0
x2 − y2x2 + y2
)= lım
x→0
x2
x2= 1
lımy→0
(lımx→0
x2 − y2x2 + y2
)= lım
y→0
−y2y2
= −1
Como ambos límites son distintos, el límite de f no existe, y por lo tanto f no puede sercontinua en (0,0).
Definición 3.3. Diremos que f es continua en una región D ⊂ Dom(f) si, y sólo si, f es continuaen cada punto de D.
MAT023 (2◦ sem. 2011) 28

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
29
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
3.3. Propiedades
Sean f, g : A ⊆ Rn −→ R continuas en ~x0. Entonces:
1. cf + g es continua en ~x0, ∀ c ∈ R.
2. fg es continua en ~x0.
3. Si g(~x0) 6= 0 en alguna vecindad de ~x0 entoncesf
ges continua en ~x0.
4. Si h es una función continua cuyo dominio permita que la composición h◦f esté bien definida,entonces la composición h ◦ f también es continua en ~x0. En particular:
a) |f | es continua en ~x0.
b) Si g(~x0) ≥ 0 en una vecindad de ~x0 entonces √g es continua en ~x0.
Ejemplos
1. Determine los puntos de R2 en donde la función f(x, y) =xy − 1
x2 − y es discontinua.
Solución:
Claramente, f es discontinua si y = x2.
2. Determine si
f(x, y) =
1− cos
√x2 + y2
x2 + y2, (x, y) 6= (0, 0)
0, (x, y) = (0, 0)
es continua en (0, 0).
Solución:
lım(x,y)→(0,0)
f(x, y) = lım(x,y)→(0,0)
1− cos√x2 + y2
x2 + y2· 1 + cos
√x2 + y2
1 + cos√x2 + y2
= lım(x,y)→(0,0)
1− cos2√x2 + y2
(x2 + y2)(
1 + cos√x2 + y2
)= lım
(x,y)→(0,0)
sen2√x2 + y2(√
x2 + y2)2 (
1 + cos√x2 + y2
) =1
2
Luego, f no es continua en (0, 0), pues lım(x,y)→(0,0)
f(x, y) 6= f(0, 0). Pero, si redefinimos la
función en (0, 0), tal que f(0, 0) =1
2, esta nueva función es continua en el origen.
MAT023 (2◦ sem. 2011) 29

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
30
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
3. Estudie la continuidad en R2 de
f(x, y) =
1
xsen(x2 + |xy|
), (x, y) 6= (0, 0)
0, (x, y) = (0, 0)
Solución:
a) Claramente, f es continua si x 6= 0.
b) Consideremos ahora puntos en los que x = 0, es decir, puntos de la forma (0, b).
lım(x,y)→(0,b)
f(x, y) = lım(x,y)→(0,b)
1
xsen(x2 + |xy|
)· x
2 + |xy|x2 + |xy|
= lım(x,y)→(0,b)
x2 + |xy|x
= lım(x,y)→(0,b)
x+|x||y|x
=
{0, b = 0
±b, b 6= 0
Por lo tanto, f es continua en (0, 0) pero no es continua en los puntos de la forma(x, y) = (0, b), b 6= 0.
4. Sea
f(x, y) =
x− yx3 − y si y − x3 6= 0
1 si y − x3 = 0
Encuentre el dominio de continuidad de f .
Solución :
Note que f es una función continua en R2 − {(x, y) : y = x3} porque es un cuociente defunciones continuas.
Sea (a, b) ∈ R2 tal que b = a3. Note que si (a, b) 6= (0, 0), (a, b) 6= (1, 1), (a, b) 6= (−1,−1),entonces :
lım(x,y)→(a,a3)
x− yx3 − y no existe porque es de la forma
c
0donde c = a−a3 es una constante distinta
de cero.
Sea (a, b) = (1, 1), si nos acercamos a este punto por el camino x = 1 y y = 1 se tiene,respectivamente, que:
lım(x,y)→(1,1)
x− yx3 − y = 1 y lım
(x,y)→(1,1)
x− yx3 − y =
1
3
Sea (a, b) = (−1,−1), si nos acercamos a este punto por el camino x = −1 y y = x se tiene,respectivamente, que:
MAT023 (2◦ sem. 2011) 30

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
31
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
lım(x,y)→(−1,−1)
x− yx3 − y = 1 y lım
(x,y)→(−1,−1)
x− yx3 − y = 0
Sea (a, b) = (0, 0), si nos acercamos a este punto por el camino x = 0 y y = 0 se tiene,respectivamente, que:
lım(x,y)→(0,0)
x− yx3 − y = 1 y lım
(x,y)→(0,0)
x− yx3 − y =∞
Por lo tanto, la función f es discontinua sobre todos los puntos de la curva y = x3. Es decir,el dominio de continuidad de f es R2 − {(x, y) : y = x3}.
5. Dada la función
f(x, y) =
(y − 2)2 sen(xy)
x2 + y2 − 4y + 4si (x, y) 6= (0, 2)
0 si (x, y) = (0, 2)
¿Es f una función continua?
Solución:
Observamos que si (x, y) 6= (0, 2), la función es continua. Veamos qué sucede en (x, y) = (0, 2),para lo cual usaremos el Teorema del Sandwich:
0 ≤∣∣∣∣(y − 2)2 sen(xy)
x2 + (y − 2)2
∣∣∣∣ ≤ sen(xy) −→ 0 si (x, y)→ (0, 2)
Por lo tanto
lım(x,y)→(0,2)
(y − 2)2 sen(xy)
x2 + y2 − 4y + 4= 0
Luego, la función es continua en todo R2.
6. Analice la continuidad de las siguientes funciones:
a) f(x, y) = ln(x+ y − 1)
b) f(x, y) =√x e√
1−y2
c) f(x, y) =
x2 + y2
ln(x2 + y2)si (x, y) 6= (0, 0)
0 si (x, y) = (0, 0)
Solución:
a) Para que se pueda realizar la composición entre la función ln y la función g(x, y) = x+y−1con Domg = R2, es necesario restringir el dominio de g al semiplano x + y ≥ 1. Luego, f escontinua en {(x, y) ∈ R2 : x+ y ≥ 1}, pues es composición de dos funciones continuas.
Dejamos b), c) como ejercicio.
MAT023 (2◦ sem. 2011) 31

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
32
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
Ejercicios
Determine si las siguientes son o no continuas en (0, 0):
1. f(x, y) =
4x3
x2 + y2, (x, y) 6= (0, 0)
0, (x, y) = (0, 0)
2. f(x, y) =
xy − x
x2 − 2x+ y2, (x, y) 6= (0, 0)
0, (x, y) = (0, 0)
3. f(x, y) =
x2y2
x2 + y2, (x, y) 6= (0, 0)
0, (x, y) = (0, 0)
4. f(x, y) =
sen(x3 − y3)
x− y , x 6= y
0, x = y
3.4. Cambio de variable. Caso particular: Coordenadas Polares
Observación: Se debe ser cuidadoso al utilizar cambio de coordenadas para el cálculo de límites,particularmente las coordenadas polares. Consideremos lo siguientes ejemplos:
Ejemplos
1. Estudie la continuidad en (0, 0) de la función
f(x, y) =
x2 − xyx+ y
, si (x, y) 6= (0, 0)
0, si (x, y) = (0, 0)
Solución:
Usando coordenadas polares, es decir, haciendo x = r cos θ, y = r sen θ:
lım(x,y)→(0,0)
x2 − xyx+ y
= lımr→0
r2(cos2 θ − cos θ sin θ)
r(cos θ + sen θ)= lım
r→0
r cos θ(cos θ − sen θ)
(cos θ + sen θ)=
= lımr→0
r cos θ (cos θ − sen θ)
(cos θ + sen θ)· cos θ − sen θ
cos θ − sen θ= lım
r→0
r cos θ (1− sen 2θ)
2 cos2 θ − 1
MAT023 (2◦ sem. 2011) 32

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
33
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
La tentación para afirmar que el límite anterior es 0 es grande, pero ello no es correcto, puestoque existe un ángulo (al menos) para el cual el denominador también se anula.
Si usamos el camino y = −x notamos que el límite queda: lımx→0
x2 + x2
x− x −→ @
Por lo tanto f no es continua en (0,0).
2. Calcule, si existe, lım(x,y)→(0,0)
y√x · sen(y3)
x4 + y4.
Solución 1:
Consideremos x = r cos(θ), y = r sen(θ) y reemplazando en el límite queda:
lımr→0
r32
√cos(θ) sen(r3 sen3(θ))
r4(cos4(θ) + sen4(θ))= lım
r→0
√cos(θ) sen(r3 sen3(θ))
r52 (cos4(θ) + sen4(θ))
L’H=
lımr→0
3r2√
cos(θ) sen3(θ) sen(r3 sen3(θ))52r
32 (cos4(θ) + sen4(θ))
= lımr→0
3√r√
cos(θ) sen3(θ) sen(r3 sen3(θ))52(cos4(θ) + sen4(θ))
= 0
Solución 2:
Como x4 + y4 ≥ y4, se tiene:∣∣∣∣y√x · sen(y3)
x4 + y4
∣∣∣∣ ≤ ∣∣∣∣y√x · sen(y3)
y4
∣∣∣∣≤
∣∣∣∣√x · sen(y3)
y3
∣∣∣∣≤ √
x
Por lo tanto,
lım(x,y)→(0,0)
∣∣∣∣y√x · sen(y3)
x4 + y4
∣∣∣∣ ≤ lım(x,y)→(0,0)
√x = 0
Luego,
lım(x,y)→(0,0)
y√x · sen(y3)
x4 + y4= 0.
MAT023 (2◦ sem. 2011) 33

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
34
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
3.5. Límites y Continuidad de Funciones de Rn −→ Rm
Una función vectorial de variable vectorial es una función ~F : A ⊆ Rn −→ Rm que asocia a cada~x ∈ Rn un punto ~F(~x) = (f1(~x), f2(~x), · · · , fm(~x)) ∈ Rm. Cada función fi(~x), i = 1, · · · ,m sedenomina función componente de ~F.
Ejemplos
1. La transformación lineal T : R2 −→ R3, dado por T (x, y) = (x+ 2y,−3x+ y, x− 4y)es una de estas funciones. En general, todas las transformaciones lineales de Rn −→ Rm sonfunciones vectoriales de variable vectorial.
2. T : R3 −→ R3, dado por T (x, y, z) = (xy2, cosxyz, x+ y + z).
Definición 3.4. Sea ~F : A ⊆ Rn −→ Rm, y sea ~x0 ∈ Rn un punto de acumulación de A.Diremos que lım
~x→~x0
~F(~x) = ~L ∈ Rm ⇐⇒
∀ε > 0 ∃δ > 0 : 0 < d(~x, ~x0) < δ =⇒∥∥∥~F(~x) − ~L
∥∥∥ < ε
Teorema 2. Sea ~F : A ⊆ Rn −→ Rm, ~x0 ∈ Rn y ~L = (l1, l2, · · · ,m). Entonces,
lım~x→~x0
~F(~x) = ~L ⇐⇒ lım~x→~x0
fi(~x) = li, i = 1, · · · ,m
Definición 3.5. Sea ~F : A ⊆ Rn −→ Rm, ~x0 ∈ A. Diremos que ~F es continua en ~x0 ⇐⇒lım~x→~x0
~F(~x) = ~F(~x0).
3.6. Derivadas Parciales
Hallaremos a continuación las derivadas parciales de una función f , es decir, aquellas que seobtienen al derivar la función respecto a sólo una de las variables considerando las otras comoconstantes.
Definición 3.6. Sea f : Rn −→ R, ~a = (a1, a2, · · · , an) ∈ Rn. Si el límite
lımh→0
f(a1, · · · , ai−1, ai + h, ai+1, · · · , an)− f(a1, · · · , ai−1, ai, ai+1, · · · , an)
h
existe, lo denotaremos por∂f
∂xi(~a), y lo llamaremos la derivada parcial de f con respecto a la
variable xi en el punto ~a. Otras notaciones que también usaremos son: Dif(~a), fxi(~a).
Observación. Dif(~a) es la derivada ordinaria de la función de una variable g : R −→ R, cong(x) = f(a1, · · · , ai−1, x, ai+1, · · · , an), donde la variable x ocupa el lugar i-ésimo en la n-upla. Esdecir, Dif(~a) = g′(ai).
MAT023 (2◦ sem. 2011) 34

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
35
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
Ejemplos
Calculemos las derivadas parciales con respecto a cada variable de las siguientes funciones:
1. f(x, y) = x2 sen y, usando la definición y también aplicando propiedades conocidas del cálcu-lo en una variable, en:
a) (1, π2 ) b) (x0, y0)
Solución:
a) Por la definición:∂f
∂x
(1,π
2
)= lım
h→0
f(1 + h, π2 )− f(1, π2 )
h= lım
h→0
(1 + h)2 · 1− 1
h= lım
h→0
h2 + 2h
h= 2
∂f
∂y
(1,π
2
)= lım
k→0
f(1, π2 + k)− f(1, π2 )
k= lım
k→0
sen(π2 + k)− 1
k= lım
k→0
cos k − 1
k= 0
Aplicando las propiedades del cálculo en una variable:
∂f
∂x
(1,π
2
)= 2x sen y |(1,π2 ) = 2
∂f
∂y
(1,π
2
)= x2 cos y |(1,π2 ) = 0
b) Por la definición:∂f
∂x(x0, y0) = lım
h→0
f(x0 + h, y0)− f(x0, y0)
h= lım
h→0
(x0 + h)2 sen y0 − x20 sen y0h
=
= lımh→0
2x0 · h sen y0 + h2 sen y0h
= 2x0 · sen y0
Si aplicamos derivación en la variable x, considerando y constante:∂f
∂x(x0, y0) = 2x · sen y |(x0,y0) = 2x0 · sen y0
Dejamos como ejercicio los cálculos correspondientes a∂f
∂y(x0, y0).
2. f(x, y) = x cosx
y, y 6= 0
Solución:∂f
∂x(x, y) = cos
x
y− x
ysen
x
y,
∂f
∂y(x, y) = −x sen
x
y(− x
y2) =
x2
y2sen
x
y
3. Determine, si existe, ∂f∂x (0, 1) para f(x, y) = |x|y.Solución:
lımh→0
f(0 + h, 1)− f(0, 1)
h= lım
h→0
f(h, 1)− f(0, 1)
h
= lımh→0
|h| − 0
h, que no existe.
MAT023 (2◦ sem. 2011) 35

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
36
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
4. Determine, si existen, las derivadas parciales de
f(x, y) =
xyx2 − y2x2 + y2
, (x, y) 6= (0, 0)
0, (x, y) = (0, 0)
Solución:
a) Si (x, y) 6= (0, 0):
∂f
∂x= y
x2 − y2x2 + y2
+ xy2x(x2 + y2)− 2x(x2 − y2)
(x2 + y2)2
= yx2 − y2x2 + y2
+ xy4xy2
(x2 + y2)2=y(x4 − y4) + 4x2y3
(x2 + y2)2
∂f
∂y= x
x2 − y2x2 + y2
+ xy−2y(x2 + y2)− 2y(x2 − y2)
(x2 + y2)2
= xx2 − y2x2 + y2
− xy 4x2y
(x2 + y2)2=x(x4 − y4)− 4x3y2
(x2 + y2)2
b) Si (x, y) = (0, 0):
∂f
∂x(0, 0) = lım
h→0
f(0 + h, 0)− f(0, 0)
h= lım
h→0
0
h= 0
∂f
∂y(0, 0) = lım
h→0
f(0, 0 + h)− f(0, 0)
h= lım
h→0
0
h= 0
5. Determine, si existen, las derivadas parciales en el punto (0, 0) de la función
f(x, y) =
x3 + 3y3
x2 + y2, (x, y) 6= (0, 0)
0, (x, y) = (0, 0)
Solución:∂f
∂x(0, 0) = lım
h→0
f(0 + h, 0)− f(0, 0)
h= lım
h→0
h3
h2
h= 1
∂f
∂y(0, 0) = lım
h→0
f(0, 0 + h)− f(0, 0)
h= lım
h→0
3h3
h2
h= 3
6. Determine las derivadas parciales en todos los puntos de R2 donde estas existan, para lafunción:
f(x, y) =
{x|y|, x ≥ 0|x|y, x < 0
MAT023 (2◦ sem. 2011) 36

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
37
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
7. Sean f, g : R2 −→ R definidas por: f(x, y) =√|xy|+ 3 + ex(y−1)
2
g(x, y) =
(y − 1)2 sen(x)
x2 + (y − 1)2si (x, y) 6= (0, 1)
0 si (x, y) = (0, 1)
Si h : R2 −→ R está definida por h(x, y) = f(x, y) +∂g
∂y(x, y)
a) Determine h(0, 1).
b) ¿Es h continua en (0,1)? Justifique.
Solución:
a) Para poder determinar h(0, 1), calculamos primeramente
∂g
∂y(0, 1) = lım
h→0
g(0, 1 + h)− g(0, 1)
h= 0
Por lo tanto, h(0, 1) = f(0, 1) +∂g
∂y(0, 1) =
√3 + 1.
b) Notar que
∂g
∂y(x, y) =
2x2(y − 1) sen(x)
[x2 + (y − 1)2]2; (x, y) 6= (0, 1)
0 ; (x, y) = (0, 1)
Si consideramos el camino x = 0, entonces
lım(x,y)→(0,1)
∂g
∂y(x, y) = 0
Ahora, considere el camino y − 1 = x, entonces
lım(x,y)→(0,1)
∂g
∂y(x, y) = lım
x→0
2x2x sen(x)
[x2 + x2]2= lım
x→0
2x3 sen(x)
[2x2]2= lım
x→0
sen(x)
2x=
1
2
Lo que muestra que la función h(x, y) no es continua en (0,1).
8. Sea f : R2 → R definida por f(x, y) =
xy
x2 + ysi x2 6= −y
0 si x2 = −y
Hallar∂f
∂x(x, y) y
∂f
∂y(x, y) en aquellos puntos en que existan. ¿Son continuas en (0,0)?
Solución:
Para (x, y) con y 6= −x2:
MAT023 (2◦ sem. 2011) 37

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
38
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
∂f
∂x(x, y) =
y(x2 + y)− xy · 2x(x2 + y)2
=y2 − yx2(x2 + y)2
∂f
∂y(x, y) =
x(x2 + y)− xy(x2 + y)2
=x3
(x2 + y)2
Para (x, y) = (0, 0):
∂f
∂x(0, 0) = lım
t→0
f(t, 0)− f(0, 0)
t= lım
t→0
0− 0
t= 0
∂f
∂y(0, 0) = lım
t→0
f(0, t)− f(0, 0)
t= lım
t→0
0− 0
t= 0
Para (x, y) con y = −x2 y x 6= 0:
∂f
∂x(x,−x2) = lım
t→0
f(x+ t,−x2)− f(x,−x2)t
= lımt→0− x3 + x2t
(2xt+ t2)t
∂f
∂y(x,−x2) = lım
t→0
f(x,−x2 + t)− f(x,−x2)t
= lımt→0
tx− x3t2
Y ninguno de estos dos límites existe. Por lo tanto no existen las derivadas parciales en lospuntos de la curva y = −x2 con x 6= 0 .
Por lo tanto f admite derivadas parciales en R2 −{
(x, y) ∈ R2 : y = −x2 , x 6= 0}
∂f
∂x(x, y) =
y2 − yx2(x2 + y)2
y 6= −x2
0 (x, y) = (0, 0)
∂f
∂y(x, y) =
x3
(x2 + y)2y 6= −x2
0 (x, y) = (0, 0)
Por otra parte lım(x,y)→(0,0)
y2 − yx2(x2 + y)2
no existe, pues:
lımy→0
(lımx→0
y2 − yx2(x2 + y)2
)= lım
y→0
y2
y2= 1
lımx→0
(lımy→0
y2 − yx2(x2 + y)2
)= lım
x→0
0
x4= 0
MAT023 (2◦ sem. 2011) 38

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
39
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
Así∂f
∂x(x, y) no es continua en (0, 0) .
Analogamente lım(x,y)→(0,0)
x3
(x2 + y)2no existe. En efecto:
lımy→0
(lımx→0
x3
(x2 + y)2
)= lım
y→0
0
y2= 0
lımx→0
(lımy→0
x3
(x2 + y)2
)= lım
x→0
1
x
Y este último límite no existe. Por lo tanto∂f
∂y(x, y) no es continua en (0,0) .
Definición 3.7. Sea f : A ⊂ Rn −→ R, A una región. Si existen las n derivadas parciales de f enun punto ~x0, llamamos vector gradiente de f en ~x0 al vector
∇f(~x0) =
(∂f
∂x1(~x0),
∂f
∂x2(~x0), · · · ,
∂f
∂xn(~x0)
)
MAT023 (2◦ sem. 2011) 39

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
40
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
3.7. Interpretación Geométrica
a1
a2
a
Pa
x
y
zSea f : R2 → R, ~a = (a1, a2). La gráfica de f esuna superficie de ecuación
z = f(x, y).
Si y se mantiene constante (y = a2), entonces z =f(x, a2) es la ecuación de la curva de nivel de estasuperficie en el plano y = a2. Entonces ∂f
∂x (~a) es lapendiente de la recta tangente a la curva en el puntoPa = (a1, a2, f(a1, a2)) en el plano y = a2.
Análogamente con ∂f∂y (~a)
Ejemplo. Sea C la traza de la gráfica de z =√
36− 9x2 − 4y2 en el plano y = 2. Encuentre laecuación paramétrica de la recta tangente a C en P0 = (1, 2,
√11).
Solución:
∂z
∂x=
−9x√36− 9x2 − 4y2
∣∣∣∣∣P0
= − 9√11
l : x = t , y = 2 , z = − 9√11t+
20√11, t ∈ R
3.8. Derivadas parciales de orden superior
Sea f : A ⊆ Rn −→ R una función. En general, Dif es también una función de n variablespara cada i = 1, · · · , n. Si las derivadas parciales de estas funciones existen, se llaman segundasderivadas parciales de f ó derivadas parciales de segundo orden de f . En la práctica, lo que
calculamos es∂
∂xj
(∂f
∂xi
).
Notación.∂
∂xj
(∂f
∂xi
)=
∂2f
∂xj∂xi= Dijf = fij .
Por ejemplo, si f : A ⊆ R2 −→ R, hay 4 derivadas parciales de segundo orden:
∂2f
∂x2,
∂2f
∂x∂y,
∂2f
∂y∂x,
∂2f
∂y2.
De manera análoga se definen las derivadas parciales de orden n ≥ 3.
MAT023 (2◦ sem. 2011) 40

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
41
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
Ejemplo
Encontrar D12f(0, 0) y D21f(0, 0), si f es la función definida por
f(x, y) =
xyx2 − y2x2 + y2
, (x, y) 6= (0, 0)
0, (x, y) = (0, 0)
Solución:
Si y 6= 0 : D1f(0, y) =∂f
∂x(0, y) = lım
h→0
f(h, y)− f(0, y)
h= lım
h→0hy
h2−y2h2+y2
h= −y
Si y = 0 : D1f(0, 0) =∂f
∂x(0, 0) = lım
h→0
f(h, 0)− f(0, 0)
h= lım
h→0
0− 0
h= 0
Luego, D1f(0, y) = −y ∀ y ∈ R.
Análogamente, se puede probar que D2f(x, 0) = x ∀x ∈ R. Entonces
D12f(0, 0) = lımk→0
D1f(0, k)−D1f(0, 0)
k= lım
k→0
−kk
= −1
D21f(0, 0) = lımh→0
D2f(h, 0)−D2f(0, 0)
h= lım
h→0
h
h= 1
Vemos entonces que, en general, D12f 6= D21f . Pero, tenemos el siguiente
Teorema 3. Si f,D1f,D2f y D12f existen y son continuas en una vecindad de un puntoP0 = (x0, y0), entonces D21f(P0) existe y, más aún,
D12f(P0) = D21f(P0)
Observación. Análogamente para derivadas mixtas de orden dos de funciones de n variables.Dejamos como ejercicio probar, en el ejemplo anterior, que D12f no es continua en (0, 0).
MAT023 (2◦ sem. 2011) 41

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
42
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
4. Diferenciabilidad
4.1. Diferenciabilidad de funciones de Rn −→ R
Sea f : A ⊆ Rn −→ R, A región. Diremos que f es diferenciable en ~x0 ∈ A, si existe unatransformación lineal Df(~x0) : Rn −→ R tal que
lım~h→~0
∣∣∣f(~x0 + ~h)− f(~x0)−Df(~x0)~h∣∣∣∥∥∥~h∥∥∥ = 0
A la única transformación lineal que satisface esta propiedad se le llama la diferencial de f en~x0. Si f es diferenciable en todos los ~x ∈ A, diremos que f es diferenciable en A.
Observación 4.1. La matriz asociada a esta transformación lineal, en las bases canónicas, se llamamatriz jacobiana de f en ~x0, y, puede probarse que corresponde a la matriz de las derivadasparciales de f : (
∂f
∂x1(~x0)
∂f
∂x2(~x0) . . .
∂f
∂xn(~x0)
)Luego, para funciones f : A ⊂ Rn −→ R, la matriz jacobiana (la matriz asociada a la diferencial)
es el vector gradiente, escrito como matriz fila.
Observación 4.2. Df(~x)(~h) = ∇f(~x) ·~h, ~h ∈ Rn, es decir, la diferencial de f aplicada a ~hes igual al gradiente de f producto punto ~h.
Ejemplos
1. Probar que f(x, y) = xy es diferenciable en (0, 0).
Solución: Calculamos primero, por la definición, las derivadas parciales en (0, 0):∂f
∂x(0, 0) = lım
h→0
f(0 + h, 0)− f(0, 0)
h= lım
h→0
h · 0− 0
h= 0
∂f
∂y(0, 0) = lım
k→0
f(0, 0 + k)− f(0, 0)
k= lım
k→0
0 · k − 0
k= 0
Para ver que f es diferenciable en (0,0), debemos probar que el siguiente límite es 0:
lım(h,k)→(0,0)
∣∣∣∣f(0 + h, 0 + k)− f(0, 0)−Df(0, 0)
(hk
)∣∣∣∣√h2 + k2
= lım(h,k)→(0,0)
|hk − 0− 0|√h2 + k2
≤
≤ lım(h,k)→(0,0)
|hk − 0− 0|√h2
≤ lım(h,k)→(0,0)
|k| ≤ 0
Luego, la función es diferenciable en (0,0), y la correspondiente matriz jacobiana es (0 0).
MAT023 (2◦ sem. 2011) 42

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
43
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
2. Sea f(x, y) =(x− 1)(y − 1)
y. Probar que f es diferenciable en (2,1).
Solución: Si y 6= 0:
∂f
∂x= 1− 1
y⇒ ∂f
∂x(2, 1) = 0
∂f
∂y=
x
y2− 1
y2⇒ ∂f
∂y(2, 1) = 1
Debemos calcular ahora:
lım(h,k)→(0,0)
∣∣∣∣f(2 + h, 1 + k)− f(2, 1)− (0 1)
(hk
)∣∣∣∣√h2 + k2
= lım(h,k)→(0,0)
∣∣∣ (h+1)kk+1 − 0− k
∣∣∣√h2 + k2
= lım(h,k)→(0,0)
∣∣hk − k2∣∣√h2 + k2|k + 1|
≤ lım
∣∣∣∣ hk − k2(1 + k)k
∣∣∣∣≤ lım
∣∣∣∣h− k1 + k
∣∣∣∣ =lım |h− k|lım |1 + k| = 0
Luego, f es diferenciable en (2,1) y su matriz jacobiana en ese punto es (0 1).
Lamentablemente, la existencia de las derivadas parciales no garantiza la diferenciabilidad def . Veamos el siguiente ejemplo:
3. Determine si f es diferenciable en (0, 0), donde
f(x, y) =
{ xy
x2 + y2, (x, y) 6= (0, 0)
0, (x, y) = (0, 0)
Solución:
Tenemos que D1f(0, 0) = D2f(0, 0) = 0. Luego, si f fuese diferenciable en el origen, eljacobiano o matriz de la diferencial debiera ser (0 0). Sin embargo:
lım(h,k)→(0,0)
∣∣∣∣f(h, k)− f(0, 0)− (0 0)
(hk
)∣∣∣∣√h2 + k2
= lım(h,k)→(0,0)
|hk|(h2 + k2)
√h2 + k2
y es fácil ver que este límite no existe. Notar que deberíamos haber sospechado que la funciónno era diferenciable en (0, 0), pues vimos antes que no es continua.
MAT023 (2◦ sem. 2011) 43

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
44
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
Concluimos entonces, que una función que no es continua en un punto, no puede ser diferenciableallí (de la misma manera que en el cálculo en una variable). De la misma manera, sabemos quela continuidad en un punto tampoco garantiza la diferenciabilidad en un punto (basta considerarla función f(x) = |x|, en x = 0). El ejemplo anterior muestra, además, que la existencia de lasderivadas parciales no garantiza la diferenciabilidad. ¿Existirá una ó más condiciones sobre la funciónque permitan garantizar diferenciabilidad en un punto? Tenemos el siguiente:
Teorema 4. Sea f : A ⊆ Rn −→ R tal que todas sus derivadas parciales existen y son continuasen una vecindad que contiene al punto ~a. Entonces f es diferenciable en ~a.
Observación importante
Lamentablemente, el recíproco del teorema anterior no es cierto. Es decir, si f es diferenciableen un punto, no necesariamente las derivadas parciales en ese punto son continuas. Para constatareste hecho, basta considerar el siguiente ejemplo, que dejamos como ejercicio.
Ejemplo. Verificar que la siguiente función f es diferenciable en (0, 0) pero sus derivadas parcialesno son continuas en el origen.
f(x, y) =
(x2 + y2) sen
(1√
x2 + y2
), (x, y) 6= (0, 0)
0, (x, y) = (0, 0)
Conclusión
∃ ∂∂xi
∃ ∂∂xi
y son continuas
f diferenciable
⇐6⇒
⇐6⇒ 6⇐
⇒
Observación. Es claro que si f es diferenciable en un punto ~x0, entonces f es continua en ~x0.Además, el álgebra clásica para funciones diferenciables también se satisface para funciones definidasdesde subconjuntos de Rn.
MAT023 (2◦ sem. 2011) 44

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
45
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
4.2. Derivada Direccional
Sea f : A ⊂ Rn −→ R, ~a = (a1, a2, · · · , an) ∈ A, A una región. Sea ~u un vector unitario enRn. Definimos la derivada direccional de f en la dirección del vector ~u en el punto ~a al siguientelímite, si existe:
lımt→0
f (~a+ t~u)− f (~a)
t
Lo denotaremos por∂f
∂~u(~a) , D~uf (~a) , f~u (~a).
Ejemplo
Determine, si existe, la derivada direccional en la dirección del vector(
1√2, 1√
2
)en el punto (0, 0)
de la función
f(x, y) =
x3 + 3y3
x2 + y2, (x, y) 6= (0, 0)
0, (x, y) = (0, 0)
Solución
D~uf(0, 0) = lımt→0
f(
(0, 0) + t(
1√2, 1√
2
))− f(0, 0)
t= lım
t→0
f(
t√2, t√
2
)t
=2√2
=√
2
Observación 4.3. Si ~u = ~ei donde ~ei = (0, · · · , 0, 1, 0, · · · , 0), (con un 1 en el i-ésimo lugar)es un vector de la base canónica de Rn, entonces la derivada direccional de f en la dirección de ~eicoincide con la derivada parcial de f con respecto a la i-ésima componente.
Es decir: D~uf(~x) = D~eif(~x) =∂f
∂xi(~x) = Dif(~x) , ∀i = 1, · · · , n.
Observación 4.4. La derivada direccional representa la razón de cambio de los valores de lafunción f en la dirección del vector unitario ~u.
Teorema 5. Sea f : A ⊆ Rn −→ R una función diferenciable en ~x ∈ A donde A es una región.Entonces, la derivada direccional de f existe en cualquier dirección ~u ∈ Rn, ‖~u‖ = 1 y se tiene
D~uf(~x) = ∇f(~x) · ~u.
Observación 4.5. El teorema anterior dice que si una función f es diferenciable en un punto,entonces posee derivada direccional en cualquier dirección en ese punto, y se puede calcular usandodirectamente el gradiente de la función en el punto.
El recíproco, sin embargo, no es cierto. Una función en varias variables puede ser derivable encualquier dirección (es decir, la derivada direccional puede existir en todas las direcciones), pero noser diferenciable. Para verificar esto, considere la función
f(x, y) =
x2y
x2 − y2 si x 6= ±y0 si x = ±y
que dejamos como ejercicio.
MAT023 (2◦ sem. 2011) 45

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
46
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
El último teorema nos permite afirmar que:
Teorema 6. (del gradiente) El valor máximo (respectivamente, mínimo) de la derivada direc-cional de f en ~x0 vale ‖∇f(~x0)‖ (respectivamente, −‖∇f(~x0)‖). Además, este valor máximo(respectivamente mínimo) se alcanza en la dirección de ∇f(~x0) (respectivamente, en la dirección de−∇f(~x0) ).
Demostración. Si θ es el ángulo entre el gradiente de f y el vector unitario ~u, la derivada direccionalde f en ~x0 en la dirección ~u es
∇f(~x) · ~u = ‖∇f(~x)‖ ‖~u‖ cos θ = ‖∇f(~x)‖ cos θ, pues ~u es unitario.
Esta última expresión toma su valor máximo cuando cos θ = 1, es decir, cuando el gradientede f y ~u están en la misma dirección. (Análogamente, toma su valor mínimo cuando cos θ = −1,es decir, cuando el gradiente de f y ~u están en direcciones opuestas.
Ejemplos
1. Sea f(x, y) = x2− 4xy. Encontrar la dirección en la que f aumenta más rápidamente en (1,2),y encontrar también, en el mismo punto, la tasa máxima de crecimiento.
2. La temperatura en un punto (x, y, z) ∈ R3 está dada por T =100
x2 + y2 + z2.
(a) Determine la razón de cambio de T en el punto P = (1, 3,−2) en la dirección de (1,−1, 1).(b) ¿En qué dirección a partir de P aumenta más rápidamente la temperatura? ¿A qué tasa?
3. Un insecto situado en un punto P de un plano observa que si camina (en el plano) en ladirección noreste, la temperatura se incrementa a una razón de 0, 01◦ por cm. Cuando sedirige en la dirección sureste, la temperatura decrece a razón de 0, 02◦ por cm.
(a) Si se dirige en la dirección 30◦ al norte del occidente, ¿aumenta o disminuye la temperaturay a qué razón?
(b) ¿Hacia donde debe caminar para calentarse lo más rápidamente posible?(c) Si está cómodo con su temperatura, ¿en que dirección debe moverse para mantener cons-
tante la temperatura?
Plano tangente y recta normal a una superficie
Sea S una superficie dada por la ecuación f(x, y, z) = 0, y sea ~x0 ∈ S. El ∇f(~x0) es ortogonalal conjunto de nivel de f que pasa por ~x0 (probaremos esta afirmación cuando veamos la regla de lacadena). Esto último permite determinar la ecuación del plano tangente a una superficie S definidapor la ecuación f(x, y, z) = 0 en un punto P0 = (x0, y0, z0) ya que el plano tangente a Sen P0 es el plano que pasa por P0 y tiene como vector normal al vector ∇f(P0).
Luego, si denotamos por Π al plano tangente a la superficie S en el punto P0, se tiene que(x, y, z) ∈ Π ⇐⇒ ((x, y, z) − (x0, y0, z0)) · ∇f(P0) = 0, de donde la ecuación del planotangente es:
∂f
∂x(x0, y0, z0)(x− x0) +
∂f
∂y(x0, y0, z0)(y − y0) +
∂f
∂z(x0, y0, z0)(z − z0) = 0
MAT023 (2◦ sem. 2011) 46

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
47
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
Definición 4.1. La recta perpendicular al plano tangente en el punto P0 = (x0, y0, z0) de lasuperficie S, se llama recta normal a S en P0.
Observación 4.6. Si S es la gráfica de f(x, y, z) = 0, entonces la recta normal a S en P0 es paralelaal vector ∇f(x0, y0, z0).
Ejemplos
1. Encontrar una ecuación del plano tangente al elipsoide 34x
2 + 3y2 + z2 = 12, en el puntoP0 =
(2, 1,√
6). Encuentre también una ecuación para la recta normal al elipsoide en el mismo
punto P0.
2. Encontrar una ecuación del plano tangente al paraboloide elíptico 4x2 + y2 − 16z = 0, en elpunto P0 = (2, 4, 2). Encuentre también una ecuación para la recta normal al paraboloide enel mismo punto P0.
3. Encontrar una ecuación de la recta normal al paraboloide elíptico 4x2 + y− 16z = 0 en elpunto P0 = (2, 4, 2).
4. Encontrar la ecuación cartesiana de la recta tangente a la curva de intersección de las superficiesS1 : 3x2 + 2y2 + z2 = 49 y S2 : x2 + y2 − 2z2 = 10 en el punto P0 = (3,−3, 2).
Teorema 7. El plano tangente a la gráfica de z = f(x, y), donde f es una función diferenciable enel punto P0 = (x0, y0, z0) tiene como ecuación
z − z0 =∂f
∂x(x0, y0, z0)(x− x0) +
∂f
∂y(x0, y0, z0)(y − y0)
MAT023 (2◦ sem. 2011) 47

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
48
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
4.3. Diferenciabilidad de funciones de Rn −→ Rm
Definición 4.2. Análogamente al caso de funciones de Rn −→ R, se define la diferencial para unafunción F : A ⊆ Rn −→ Rm, es decir, una tal función F será diferenciable en ~x0 ∈ A, si existe unatransformación lineal DF (~x0) : Rn −→ Rm tal que
lım~h→~0
∥∥∥F (~x0 + ~h)− F (~x0)−DF (~x0)~h∥∥∥∥∥∥~h∥∥∥ = 0
Observación 4.7. La matriz Jacobiana, ó la matriz derivada ó la matriz asociada a la transforma-ción diferencial en las respectivas bases canónicas DF (~x0) es la matriz formada por las derivadasparciales de las funciones componentes.
Más precisamente:
Si F : A ⊆ Rn −→ Rm con F (~x) = (f1(~x), f2(~x), · · · , fm(~x)) es diferenciable en ~x0, entoncesla correspondiente matriz jacobiana es:
[JF (~x0)] =
∂f1∂x1
(~x0)∂f1∂x2
(~x0) · · · ∂f1∂xn
(~x0)
∂f2∂x1
(~x0)∂f2∂x2
(~x0) · · · ∂f2∂xn
(~x0)
· · · · · · · · ·
· · · · · · · · ·
∂fm∂x1
(~x0)∂fm∂x2
(~x0) · · · ∂fm∂xn
(~x0)
Ejemplos:
1. Si f : Rn → Rm es lineal, entonces Df(−→a ) = f, ∀−→a ∈ Rn.
2. Sea f : R2 → R definida por f(x, y) = xy , entonces Df(a, b)(x, y) = bx+ay, ∀(a, b) ∈ R2.
Solución:
1. lım−→h→−→0
‖f(−→a +−→h )− f(−→a )− f(
−→h )‖
‖−→h ‖= lım−→
h→−→0
‖f(−→a ) + f(−→h )− f(−→a )− f(
−→h )‖
‖−→h ‖= 0
2. lım(h,k)→(0,0)
|f(a+ h, b+ k)− f(a, b)−Df(a, b)(h, k)|‖(h, k)‖ = lım
(h,k)→(0,0)
|(a+ h)(b+ k)− ab− (bh+ ak)|√h2 + k2
= lım(h,k)→(0,0)
|hk|√h2 + k2
≤ lım(h,k)→(0,0)
|hk||k| = lım
(h,k)→(0,0)|h| = 0
MAT023 (2◦ sem. 2011) 48

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
49
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
5. Regla de la Cadena
Recordemos que en R, si g es una función diferenciable en la variable u, es decir, g = g(u) esdiferenciable, y u es una función diferenciable en la variable x, es decir, u = f(x) es diferenciable,entonces, es posible calcular la derivada de g ◦ f con respecto a x del siguiente modo:
(g ◦ f)′(x) = g′(f(x)) · f ′(x) ó equivalentementedg
dx=dg
du
du
dx
Análogamente, supongamos que f : R2 −→ R, u, v : R −→ R con f = f(u, v),u = u(x), v = v(x), todas funciones diferenciables en las respectivas variables. Entonces:
∂f
∂x=∂f
∂u
du
dx+∂f
∂v
dv
dx
Ejemplo
Si f(u, v) = u2v − v3 + 2uv, u = u(x) = ex, v = v(x) = senx, entonces
∂f
∂x= (2uv + 2v) ex +
(u2 − 3v2 + 2u
)cosx.
Podemos generalizar un paso más: seanf, u, v : R2 −→ R, funciones diferenciables tal que f = f(u, v), u = u(x, y), v = v(x, y).Entonces:
∂f
∂x=∂f
∂u
∂u
∂x+∂f
∂v
∂v
∂x
∂f
∂y=∂f
∂u
∂u
∂y+∂f
∂v
∂v
∂y
Ejemplo
1. Sea w = w(x, y) = x2y, x = s2 + t2, y = cos st. Determine∂w
∂sy
∂w
∂t.
2. Si w = f(x, y) donde x = r cos θ, y = r sen θ, pruebe que(∂w
∂x
)2
+
(∂w
∂y
)2
=
(∂w
∂r
)2
+1
r2
(∂w
∂θ
)2
3. Si ϕ es una función derivable en una variable y z = y ϕ(x2 − y2) , probar
1
x· ∂z∂x
+1
y· ∂z∂y
=z
y2
Solución
∂z
∂x= 2xy ϕ′(x2 − y2) y
∂z
∂y= ϕ(x2 − y2)− 2y2 ϕ′(x2 − y2)
Luego se cumple:
MAT023 (2◦ sem. 2011) 49

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
50
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
1
x· ∂z∂x
+1
y· ∂z∂y
= 2y ϕ′(x2 − y2) +1
y· ϕ(x2 − y2)− 2y ϕ′(x2 − y2) =
y ϕ(x2 − y2)y2
=z
y2
4. Si u = x3f(yx,z
x
)demuestre que x
∂u
∂x+ y
∂u
∂y+ z
∂u
∂z= 3u
Solución
Sea r =y
x, s =
z
xLuego:
∂u
∂x= 3x2f(r, s) + x3
∂f
∂r· ∂r∂x
+ x3∂f
∂s· ∂s∂x
= 3x2f(r, s)− xy∂f∂r− xz∂f
∂s
∂u
∂y= x3
∂f
∂r· ∂r∂y
+ x3∂f
∂s· ∂s∂y
= x3∂f
∂r· 1
x= x2
∂f
∂r
∂u
∂z= x3
∂f
∂r· ∂r∂z
+ x3∂f
∂s· ∂s∂z
= x3∂f
∂s
1
x= x2
∂f
∂s
Así, x∂u
∂x+ y
∂u
∂y+ z
∂u
∂z= 3x2f(r, s)− xy∂f
∂r− xz∂f
∂s+ yx2
∂f
∂r+ zx2
∂f
∂s=
= 3x3f(r, s) = 3u
5. Si w = f
(y − xxy
,z − yyz
), probar que x2
∂ w
∂ x+ y2
∂ w
∂ y+ z2
∂ w
∂ z= 0
Solución:
Hacemos u =y − xxy
y v =z − yyz
. Entonces
∂w
∂x=
∂f
∂u· ∂u∂x
+∂f
∂v· ∂v∂x
=∂f
∂u
(−xy − y2 + xy
x2y2
)+∂f
∂v· 0
= − 1
x2· ∂f∂u
∂w
∂y=
∂f
∂u· ∂u∂y
+∂f
∂v· ∂v∂y
=∂f
∂u
(xy − (y − x)x
x2y2
)+∂f
∂v
(−yz − (z − y)z
y2z2
)=
1
y2· ∂f∂u− 1
y2· ∂f∂v
∂w
∂z=
∂f
∂u· 0 +
∂f
∂v
(yz − (z − y)y
y2z2
)=
1
z2· ∂f∂v
MAT023 (2◦ sem. 2011) 50

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
51
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
Luego se tiene:
x2 · ∂w∂x
+ y2 · ∂w∂y
+ z2 · ∂w∂z
= −∂f∂u
+∂f
∂u− ∂f
∂v+∂f
∂v= 0
6. Sea w(x, y) = x2 + y2 , con x = r cos θ y y = r sen θ. Calcular∂w
∂r,∂2w
∂r2,∂2w
∂θ∂r.
Análogamente se generaliza para funciones diferenciables en más variables.
Más formalmente, y en el caso general, se tiene el siguiente
Teorema 8. (Regla de la Cadena)Sean
−→F : Rn −→ Rm diferenciable en −→a y
−→G : Rm −→ Rp diferenciable en
−→F (−→a ). Entonces,
−→G ◦ −→F : Rn −→ Rp es diferenciable en −→a y se tiene :
D(−→G ◦ −→F )(−→a ) = D
−→G(−→F (−→a )) ·D(
−→F (−→a ))
Escrito en forma matricial (por simplicidad escribimos F y G en lugar de−→F y
−→G):
∂(G◦F )1∂x1
(−→a ) · · · ∂(G◦F )1∂xn
(−→a )...
...∂(G◦F )p∂x1
(−→a ) · · · ∂(G◦F )p∂xn
(−→a )
=
∂g1∂y1
(F (−→a )) · · · ∂g1∂ym
(F (−→a ))...
...∂gp∂y1
(F (−→a )) · · · ∂gp∂ym
(F (−→a ))
·
∂f1(−→a )
∂x1· · · ∂f1(
−→a )∂xn
......
∂fm(−→a )∂x1
· · · ∂fm(−→a )∂xn
En particular, se tiene que:
∂
∂xj(G ◦ F )i(
−→a ) =
m∑k=1
∂gi(F (−→a ))
∂yk· ∂fk∂xj
(−→a )
donde (G ◦ F )i representa a la i-ésima función componente (de Rn a R) de G ◦ F .
Observación 5.1. Notar que si m = n = p = 1 obtenemos la regla de la cadena usual en unavariable.
Ejemplos
1. Veamos que esta manera general de mirar la regla de la cadena es consistente con las situacionesexplicitadas anteriormente. Consideraremos un caso particular para ilustrar esto:
Sean{u : R2 −→ R
(x, y) 7→ u(x, y), y
{f : R2 −→ R2
(r, s) 7→ (x(r, s), y(r, s))
Luego, formamos la matriz jacobiana de u:(∂u
∂x
∂u
∂y
)
MAT023 (2◦ sem. 2011) 51

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
52
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
y la matriz jacobiana de f :
∂x
∂r
∂x
∂s
∂y
∂r
∂y
∂s
Como la diferencial es una transformación lineal, entonces la diferencial (o matriz jacobiana)de la función compuesta u ◦ f es el producto de las matrices correspondientes, vale decir:
D(u ◦ f) = Du ·Df =
(∂u
∂x
∂u
∂y
)·
∂x
∂r
∂x
∂s
∂y
∂r
∂y
∂s
Como u es una función que depende de r y s, tenemos finalmente:
∂u
∂r=
∂u
∂x· ∂x∂r
+∂u
∂y· ∂y∂r
∂u
∂s=
∂u
∂x· ∂x∂s
+∂u
∂y· ∂y∂s
2. Consideremos F : R2 −→ R2 con F (x, y) = (f1(x, y), f2(x, y)) y G : R2 −→ R2 conG(u, v) = (g1(u, v), g2(u, v)), ambas con primera derivada parcial y tales que la composiciónG ◦ F está bien definida. Entonces:
(G◦F )(x, y) = G(F (x, y)) = G(f1(x, y), f2(x, y)) = (g1(f1(x, y), f2(x, y)), g2(f1(x, y), f2(x, y)))
Escribimos la regla de la cadena en forma matricial para este caso:
∂g1∂x
∂g1∂y
∂g2∂x
∂g2∂y
=
∂g1∂u
∂g1∂v
∂g2∂u
∂g2∂v
·
∂f1∂x
∂f1∂y
∂f2∂x
∂f2∂y
Descomponiendo componente a componente:
∂g1∂x
=∂g1∂u· ∂f1∂x
+∂g1∂v· ∂f2∂x
=∂g1∂u· ∂u∂x
+∂g1∂v· ∂v∂x
∂g1∂y
=∂g1∂u· ∂f1∂y
+∂g1∂v· ∂f2∂y
=∂g1∂u· ∂u∂y
+∂g1∂v· ∂v∂y
∂g2∂x
=∂g2∂u· ∂f1∂x
+∂g2∂v· ∂f2∂x
=∂g2∂u· ∂u∂x
+∂g2∂v· ∂v∂x
∂g2∂y
=∂g2∂u· ∂f1∂y
+∂g2∂v· ∂f2∂y
=∂g2∂u· ∂u∂y
+∂g2∂v· ∂v∂y
MAT023 (2◦ sem. 2011) 52

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
53
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
3. Demostrar que el gradiente a una superficie S dada por la ecuación F (x, y, z) = 0, es normala la superficie.
En efecto: Sea P0 = (x0, y0, z0) un punto en S. Entonces F (x0, y0, z0) = 0. Sea C unacurva en S que pasa por P0, con ecuaciones paramétricas:
x = f(t), y = g(t), z = h(t)
Sea t0 el valor del parámetro en P0. Escribimos una ecuación vectorial de C usando su para-metrización:
−→r (t) = f(t)−→i + g(t)
−→j + h(t)
−→k
C ⊂ S =⇒ F (f(t), g(t), h(t)) = 0
Sea G(t) = F (f(t), g(t), h(t)). Si F es diferenciable y si f ′(t0), g′(t0) y h′(t0) existen,aplicando regla de la cadena:
G′(t0) =∂F
∂x(x0, y0, z0)f
′(t0) +∂F
∂y(x0, y0, z0)g
′(t0) +∂F
∂z(x0, y0, z0)h
′(t0)
Luego: G′(t0) = ∇F (x0, y0, z0) ·Dt−→r (t0) = ∇F (x0, y0, z0) · −→r ′(t0).
Como G′(t) = 0 ∀t bajo consideración (pues F (f(t), g(t), h(t)) = 0), lo anterior se puedeescribir:
∇F (x0, y0, z0) · −→r ′(t0) = 0 y también ∇F (x, y, z) · −→r ′(t) = 0 ∀ (x, y, z) ∈ CComo −→r ′(t0) es un vector tangente a C en P0, esto implica que el vector ∇F (x0, y0, z0) esperpendicular a toda recta tangente a S en P0 (y también es perpendicular a toda curva C enS que pasa por P0).
4. La regla de la cadena es útil, entre otros, para resolver problemas de rapidez de cambio devariables relacionadas, como vemos en el siguiente ejemplo.
En un circuito eléctrico simple se tiene una resistencia R y un voltaje V . En cierto instante,V = 80 volts y crece a razón de 5 volts por minuto, mientras que R = 40 ohms y disminuye
a razón de 2 ohms por minuto. La ley de Ohm establece que I =V
R. Determine la rapidez de
cambio de la intensidad de corriente I en ese instante.
SolucióndI
dt=
∂I
∂V
dV
dt+∂I
∂R
dR
dt=
1
R
dV
dt+
(− V
R2
)dR
dt
Sustituyendo los valores, obtenemos:
dI
dt=
(1
40
)· 5 +
(− 80
1600
)(−2) = 0, 225 A/min
MAT023 (2◦ sem. 2011) 53

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
54
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
Ejercicios
1. Determine∂u
∂ry∂u
∂s, si u = ln
√x2 + y2, x = r es, y = r e−s
2. Sean f y g de clase C2. Si w = f(ax+ by) + g(ax− by), donde a, b son constantes no nulas,demostrar que
b2(∂2w
∂x2
)= a2
(∂2w
∂y2
)
3. Sea w = f(t2 + r, t− r3), con f de clase C2. Calcular∂w
∂t,∂w
∂r,∂2w
∂r∂t
MAT023 (2◦ sem. 2011) 54

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
55
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
5.1. Derivadas Implícitas
La regla de la cadena es útil para encontrar las derivadas de funciones que están definidas demanera implícita. Recordemos el procedimiento para funciones de R en R:supongamos que la ecuación F (x, y) = 0 define implícitamente a la función y = f(x).Es decir, F (x, f(x)) = 0, ∀x ∈ Dom(f). Reescribamos de la siguiente manera:
w = F (u, y), con u = x, y = f(x)
Usando la regla de la cadena y recordando que u, v son funciones de una variable, obtenemos:
dw
dx=∂w
∂u
du
dx+∂w
∂y
dy
dx
Como F (x, f(x)) = 0, ∀x, se tiene quedw
dx= 0. Reemplazando en la ecuación:
0 =∂w
∂u· 1 +
∂w
∂yf ′(x)
Luego, si∂w
∂y6= 0, entonces
f ′(x) =dy
dx= −D1f(x, y)
D2f(x, y)
Tenemos entonces el siguiente:
Teorema 9. Si una ecuación F (x, y) = 0 determina implícitamente una función derivable f de unavariable real, tal que y = f(x), entonces
dy
dx= −D1F (x, y)
D2F (x, y)= −Fx(x, y)
Fy(x, y)= −
∂F∂x (x, y)∂F∂y (x, y)
Es posible razonar de la misma manera para funciones en tres variables. Es decir, si una ecuaciónF (x, y, z) = 0 determina implícitamente una función diferenciable f de dos variables (x e y, porejemplo), tales que z = f(x, y) en el dominio de f , entonces se tiene:
Teorema 10. Si una ecuación F (x, y, z) = 0 determina implícitamente una función derivable f dedos variables x e y, tal que z = f(x, y) ∀ (x, y) en el dominio de f , entonces
∂z
∂x= −D1F (x, y, z)
D3F (x, y, z),
∂z
∂y= −D2F (x, y, z)
D3F (x, y, z)
Ejemplo
Sea z = f(x, y), tal que x2z2 + xy2 − z3 + 4yz − 5 = 0. Encuentre∂z
∂x,
∂z
∂y.
Solución
∂z
∂x= − 2xz2 + y2
2x2z − 3z2 + 4y
MAT023 (2◦ sem. 2011) 55

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
56
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
∂z
∂y= − 2xy + 4z
2x2z − 3z2 + 4y
Observación. La manera en que se ha enfocado la derivación implícita hasta aquí es meramenteoperacional. Para poder comprender mejor los conceptos y restricciones involucradas, es necesarioestudiar los teoremas de la función inversa (para funciones f : Rn −→ Rn ) y de la funciónimplícita, para funciones f : Rn −→ Rm.
5.2. Teoremas de la función inversa y de la función implícita
Dada una función f : Rn −→ Rn, es posible preguntarse:
1. ¿Es f una función invertible?
2. Si lo es y además f es diferenciable, ¿será f−1 diferenciable? ¿Bajo qué condiciones?
5.2.1. Teorema de la función inversa
Teorema 11. Sea U ⊆ Rn un abierto, y sea f : U −→ Rn una función de clase C1. Sea x0 ∈ Utal que det(Df(x0)) 6= 0. Entonces, existen abiertos V,W ⊆ Rn, x0 ∈ V, f(x0) ∈ W :f : V −→W es biyectiva y f−1 : W −→ V es de clase C1.
Además, se tiene que Df−1(y) = [Df(f−1(y)
)]−1, ∀y ∈W
Observación
1. Sea F = (f1, f2, · · · , fn), con fi : Rn −→ R, ∀ i = 1, · · · , n. Entonces el determinantede la matriz jacobiana
det(DF (x0)) =
∣∣∣∣∣∣∣∣∣∣∣∣
∂f1∂x1
∂f1∂x2
· · · ∂f1∂xn
∂f2∂x1
∂f2∂x2
· · · ∂f2∂xn
. . . . . . . . . . . . . . . . . . .∂fn∂x1
∂fn∂x2
· · · ∂fn∂xn
∣∣∣∣∣∣∣∣∣∣∣∣(x0) =
∂(f1, f2, · · · , fn)
∂(x1, · · · , xn)(x0)
se llama el jacobiano de F en x0.
2. Una función puede tener inversa aunque el det f ′(x0) = 0. Lo que no se puede garantizares la diferenciabilidad de la función inversa. Por ejemplo, en una variable, la funciónf : R→ R, dada por f(x) = x3 es invertible, pero, claramente, su inversa f−1 : R→ R,f−1(x) = 3
√x no es derivable en x = 0.
3. Sea f : R2 −→ R2, con f(x, y) = (ex cos y, ex sen y). Veamos que en este casodet(f ′(x, y)) 6= 0 ∀ (x, y) ∈ R2 pero que f no es inyectiva.
MAT023 (2◦ sem. 2011) 56

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
57
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
det(f ′(x, y)) =
∣∣∣∣ ex cos y ex sen yex sen y ex cos y
∣∣∣∣ = e2x > 0 ∀ (x, y) ∈ R2
Pero, f(x, y) = f(x, y+ 2kπ) , ∀k ∈ Z. Por lo tanto, f no es inyectiva. Sin embargo, lo queel teorema de la función inversa garantiza es que f es localmente invertible, y, más aún,con inversa local de clase C1.
Ejemplos
1. Sea U ⊆ R2 abierto, y sea f : U −→ R de clase C1. Sea (a, b) ∈ U y suponga que D2f(a, b) 6= 0.Entonces, la función F : R2 −→ R2 dada por F (x, y) = (x, f(x, y)) es localmenteinvertible en (a, b).
En efecto: f ∈ C1 ∧ F (x, y) = (x, f(x, y)) =⇒ F ∈ C1. Además:
det (F ′(a, b)) =
∣∣∣∣∣∣∣∣1 0
∂f
∂x(a, b)
∂f
∂y(a, b)
∣∣∣∣∣∣∣∣ =∂f
∂y(a, b) = D2f(a, b) 6= 0
Luego, por el teorema de la función inversa, se tiene que F es localmente invertible.
2. Sea F : R2 −→ R2, F (x, y) = (f1(x, y), f2(x, y)) = (x sen y, 2x − 2y). Determine lospuntos en R2 en los que la función es localmente invertible, y calcule las derivadas parcialesen aquellos puntos.
El determinante de la matriz Jacobiana es:
|JF | =
∣∣∣∣∂(f1, f2)
(x, y)
∣∣∣∣ =
∣∣∣∣ sen y x cos y2 −2
∣∣∣∣ = −2(sen y + x cos y)
Luego, ∀(x, y) ∈ R2 : sen y + x cos y 6= 0 , se tiene que la función inversa de F esdiferenciable. Más aún, en tales (x, y):
DF−1(x, y) =
(sen y x cos y
2 −2
)−1=
1
−2(sen y + x cos y)·(−2 −x cos y−2 sen y
)de donde
∂x
∂u=
1
sen y + x cos y
∂x
∂v=
x cos y
2(sen y + x cos y)
∂y
∂u=
1
sen y + x cos y
∂y
∂v= − sen y
2(sen y + x cos y)
MAT023 (2◦ sem. 2011) 57

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
58
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
5.2.2. Teorema de la función implícita
Sean ~x = (x1, x2, . . . , xn) ∈ Rn, ~y = (y1, y2, . . . , ym) ∈ Rm y considere la funciónf : Rn × Rm −→ Rm, (x,y) 7→ f(x,y). Diremos que la función ϕ : Rn −→ Rm estádefinida implícitamente por la ecuación f(x,y) = 0 si f(x, ϕ(x)) = 0, ∀x ∈ Dom(ϕ).
Teorema 12. Sea f : Rn×Rm −→ Rm una función de clase C1, en un abierto que contiene a (a, b),
con f(a, b) = 0. Si∂(f1, f2, · · · , fm)
∂(y1, y2, · · · , ym)(a, b) 6= 0, entonces existe un abierto A ⊂ Rn con
a ∈ A y un abierto B ⊂ Rm con b ∈ B, tal que ∃ϕ : A −→ B de clase C1 tal que ϕ(a) = b yf(x, ϕ(x)) = 0, ∀x ∈ A.
Ejemplos
1. Sea f : R2 −→ R de clase C1, y supongamos que f(x, ϕ(x)) = 0 ∀x ∈ Dom(ϕ), es decirϕ está definida implícitamente por f . Determine el dominio en donde es posible calcular ϕ′(x),y calcúlelo.
Solución:
Sea G(x) = f(x, ϕ(x)) = 0. Luego,
G′(x) = D1f(x, ϕ(x)) · 1 + D2f(x, ϕ(x)) · ϕ′(x) = 0
Luego, ϕ′(x) = − D1f(x, ϕ(x))
D2f(x, ϕ(x)), siempre que D2f(x, ϕ(x)) 6= 0
2. Sea f : R3 −→ R de clase C1, y supongamos que f(x, y, ϕ(x, y)) = 0 ∀(x, y) ∈ Dom(ϕ),
es decir ϕ está definida implícitamente por f . Calcular∂ϕ
∂xy
∂ϕ
∂x.
Solución:
Sea G(x, y) = f(x, y, ϕ(x, y)) = 0. Luego:
∂G
∂x= D1f · 1 + D2f · 0 + D3f ·
∂ϕ
∂x= 0
∂G
∂y= D1f · 0 + D2f · 1 + D3f ·
∂ϕ
∂y= 0
Luego, si D3f 6= 0 :
∂ϕ
∂x(x, y) = − D1f(x, y, ϕ(x, y))
D3f(x, y, ϕ(x, y)),
∂ϕ
∂y(x, y) = − D2f(x, y, ϕ(x, y))
D3f(x, y, ϕ(x, y))
3. Sean F1, F2 : R5 −→ R funciones de clase C1, y consideremos el sistema de ecuaciones
F1(x, y, x, u, v) = 0F2(x, y, x, u, v) = 0
MAT023 (2◦ sem. 2011) 58

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
59
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
¿Qué condiciones son suficientes para poder escribir u y v en función de x, y, z? En el caso en
que estas condiciones se satisfacen, determine∂u
∂x,∂u
∂y,∂u
∂z,
∂v
∂x,∂v
∂y,∂v
∂z.
Solución:
Sea F : R3×R2 −→ R2, con F = (F1, F2). Sean P = (x, y, z), Q = (u, v). Se trata dedeterminar cuando se puede despejar Q en función de P en el sistema
F (P,Q) = (0, 0)
es decir, cuando existe una función ϕ tal que F (P,ϕ(P )) = (0, 0) o, equivalentemente,
(F1(P,ϕ(P )), F2(P,ϕ(P ))) = (0, 0).
Esto es posible si se cumplen las hipótesis del teorema de la función implícita, es decir, si
det
(D4F1 D5F1
D4F2 D5F2
)=
∂(F1, F2)
∂(u, v)6= 0
Bajo esta hipótesis, es posible calcular las derivadas parciales pedidas; calculemos, por ejem-
plo,∂u
∂x. Derivando el sistema de ecuaciones, utilizando la regla de la cadena, obtenemos:
∂F1
∂x+
∂F1
∂u
∂u
∂x+
∂F1
∂v
∂v
∂x= 0
∂F2
∂x+
∂F2
∂u
∂u
∂x+
∂F2
∂v
∂v
∂x= 0
Usando la regla de Cramer:
∂u
∂x=
∣∣∣∣∣∣∣∣∣∣∣−∂F1
∂x
∂F1
∂v
−∂F2
∂x
∂F2
∂v
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣−∂F1
∂u
∂F1
∂v
−∂F2
∂u
∂F2
∂v
∣∣∣∣∣∣∣∣∣∣∣
=
−∂(F1, F2)
∂(x, y)
∂(F1, F2)
∂(u, v)
Como ejercicio, obtenga∂v
∂x,∂u
∂y,∂v
∂y,∂u
∂z,∂v
∂z. Observe que en el denominador siempre
aparece∂(F1, F2)
∂(u, v), que es no mulo por hipótesis.
MAT023 (2◦ sem. 2011) 59

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
60
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
4. Demuestre que la ecuación z3 + z2y − 7x2y2z + c = 0 define z como función de x e y. Siesta función es z = ϕ(x, y) , hallar un valor para la constante c para el cual ϕ(1, 1) = 2 y
calcular∂ϕ
∂xy
∂ϕ
∂yen (1,1).
Solución:
f(x, y, z) = z3 + z2y − 7x2y2z + c =⇒ ∂f
∂z= 3z2 + 2yz − 7x2y2
∴∂f
∂z(1, 1, 2) = 9 6= 0
Luego, ∃ϕ definida en una vecindad de (1,1) tal que ϕ(1, 1) = 2 ∧ f(x, y, ϕ(x, y)) = 0
∂ϕ
∂x= − −14xy2z
3z2 + 2zy − 7x2y2∂ϕ
∂y= − z2 − 14x2z
3z2 + 2zy − 7x2y2
∂ϕ
∂x(1, 1, 2) =
28
9∧ ∂ϕ
∂y(1, 1, 2) =
24
9
Ejercicios
1. Considere el sistemau2 − 2xv + x = 0uv + 3x− 2y = 0
Suponga que u y v son funciones diferenciables de x e y en el punto (x, y) = (1, 2). Si sabe
que: u(1, 2) = v(1, 2) = 1, determine∂u
∂x(1, 2),
∂u
∂y(1, 2),
∂v
∂x(1, 2) ∧ ∂v
∂y(1, 2).
2. ¿Puede definirse la superficie de ecuación xy+z ln y+exz = 1 en la forma z = f(x, y)en una vecindad de (0,1,1)? ¿Y en la forma y = g(x, z)?
3. Demuestre que el sistemav + lnu− xy = 0
u+ ln v − (x− y) = 0
no define u, v en términos de x, y en un entorno de (x, y, u, v) =
(1 +√
5
2,−1 +
√5
2, 1, 1
).
4. Si F : R3 −→ R es una función diferenciable, ¿qué condiciones debe cumplir F para queen la ecuación F (x, y, z) = 0 cada variable pueda despejarse localmente en función delas otras dos variables? Bajo estas condiciones, demuestre que:
∂z
∂x· ∂x∂y· ∂y∂z
= −1
MAT023 (2◦ sem. 2011) 60

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
61
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
5.3. Teorema de Taylor para funciones de varias variables
Sea X = (x1, x2, · · · , xn) y H = (h1, h2, · · · , hn). Supongamos que X ∈ U ⊆ Rn, U abierto, yque f : U −→ R es de clase Cn. Como en una variable, interesa encontrar una expresión polinomialque permita aproximar a f , en algún entorno de X.
Para ello, reduciremos el problema a una variable, del siguiente modo: sea
(∗) g(t) = f(X + tH) = f(x1 + th1, x2 + th2, · · · , xn + thn), para 0 ≤ t ≤ 1
∴ g(0) = f(X) y g(1) = f(X +H). Aplicando el Teorema de Taylor a la función g:
g(1) = g(0) +g′(0)
1!+
g′′(0)
2!+ · · · +
g(n−1)(0)
(n− 1)!+
g(n)(η)
n!
para algún η ∈]0, 1[, donde g ∈ Cn(]0, 1[).
Hacemos ui = xi + thi, ∀i = 1, · · · , n en (*), y aplicando regla de la cadena:
g′(t) =∂f
∂u1
du1dt
+∂f
∂u2
du2dt
+ · · · +∂f
∂un
dundt
=n∑i=1
Dif · hi = ∇f ·H
Para calcular g′′(t) debemos conocerd
dt
(∂f
∂ui
)=
n∑j=1
∂2f
∂uj∂ui· hj
∴ g′′(t) =
n∑j=1
∂2f
∂uj∂u1hj
· h1 +
n∑j=1
∂2f
∂uj∂u2hj
· h2 + · · · +
n∑j=1
∂2f
∂uj∂unhj
· hng′′(t) =
n∑i=1
n∑j=1
∂2f
∂uj∂uihjhi, expresión que podemos escribir en la forma:
g′′(t) = (h1D1 + h2D2 + · · · + hnDn)2 f(X + tH) = (H · ∇)2 f(X + tH)
Análogamente, es posible calcular las derivadas de orden superior. Se tiene entonces:
Teorema 13. Sea r ∈ N. Sea f una función de clase Cr definida en un abierto U ⊂ Rn, y seanX ∈ U, H ∈ Rn. Sea g(t) = f(X + tH). Entonces:
g(r)(t) = ((H · ∇)r f) (X + tH) ∀t : X + tH ∈ U
Demostración Por inducción: Casos r = 1 y r = 2, demostrados arriba.Supongamos que la fórmula es válida para s ∈ N, s ≤ r. Definamos ψ = (H · ∇)s f .
Entoncesg(s)(t) = ψ(X + tH)
Por el caso r = 1, tenemos que:
g(s+1)(t) = ψ′(t) = ((H · ∇)ψ) (X + tH) = ((H · ∇)(s+1)f) (X + tH)
MAT023 (2◦ sem. 2011) 61

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
62
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
lo que termina la demostración.
Antes de enunciar el Teorema de Taylor, miremos un caso particular: sea f ∈ C2(U), U ⊂ R2
y sea X = (a, b). Luego:
g(t) = f((a, b) + t(h1, h2)), 0 ≤ t ≤ 1 ∴ g(0) = f(a, b), g(1) = f(a+ th1, b+ th2)
Al aplicar el Teorema de Taylor a la función g, con polinomio de grado 2:
g(1) = g(0) +g′(0)
1!+g′′(0)
2!+g′′′(η)
3!⇐⇒
f(a+ th1, b+ th2) = f(a, b) +∂f
∂xh1 +
∂f
∂yh2 +
1
2!
[∂2f
∂x2h21 +
∂2f
∂x∂yh1h2 +
∂2f
∂y2h22
]+R2
Así, podemos concluir que los polinomios de Taylor de f de grado 1 y 2, respectivamente, son:
p1(x, y) = f(a, b) + fx(x− a) + fy(y − b)
p2(x, y) = p1(x, y) +1
2
[fxx(x− a)2 + 2fxy(x− a)(y − b) + fyy(y − b)2
]donde las derivadas parciales se evalúan en (a, b).
Enunciamos a continuación, el Teorema de Taylor:
Teorema 14. (de Taylor) Sea f una función de clase Cr+1 definida en un abierto U ⊂ Rn. SeaX ∈ U, H ∈ Rn. Supongamos que el segmento de recta que une X con X +H está contenido en U .Entonces, ∃τ ∈]0, 1[:
f(X+H) = f(X) +H · ∇
1!f(X) +
(H · ∇)2
2!f(X) + · · · + (H · ∇)r
r!f(X) +
(H · ∇)r+1
(r + 1)!f(X+τH)
El último sumando se llama resto del polinomio de Taylor, y se denota por Rr(X).
La pregunta ahora es: ¿cuán buena es la aproximación de estos polinomios de Taylor para,digamos, f(x, y) en puntos cercanos a (a, b)? En otras palabras, quisiéramos poder estimar el errorque se comete al aproximar
f(x, y) ≈ p1(x, y) y f(x, y) ≈ p2(x, y)
Es interesante observar que la primera de estas aproximaciones es conocida, pues:
z = f(a, b) + fx(x− a) + fy(y − b) ⇐⇒ (fx, fy,−1) · (x− a, y − b, z − f(a, b)) = 0
es la ecuación del plano tangente a la gráfica de z = f(x, y) en el punto (a, b, f(a, b)). Es decir,estamos aproximando la superficie z = f(x, y) por su plano tangente en el punto mencionado.
Ejemplos.
MAT023 (2◦ sem. 2011) 62

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
63
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
1. Desarrollar f(x, y) = x2y alrededor del punto (1,−2) hasta los términos de grado 2, y hallarR2.
Solución∂f
∂x= 2xy,
∂f
∂y= x2,
∂2f
∂x2= 2y,
∂2f
∂y∂x= 2x,
∂2f
∂y2= 0
∂3f
∂x3= 0,
∂3f
∂x2∂y= 2,
∂3f
∂x∂y2=
∂3f
∂y3= 0
Además, f(1,−2) = −2. Luego:
x2y = −2− 4(x− 1) + (y + 2) +1
2!
[− 4(x− 1)2 + 4(x− 1)(y + 2)
]+ R2
donde R2 =1
3!3 · 2(x− 1)2(y + 2) = (x− 1)2(y + 2).
2. Obtenga los polinomios de Taylor de grado 1 y 2 para f(x, y) =√x2 + y2 en torno del
punto (3, 4). Use estos polinomios para estimar√
(3, 1)2 + (4, 02)2.
Solución∂f
∂x=
x√x2 + y2
,∂f
∂y=
y√x2 + y2
∂2f
∂x2=
y2
(x2 + y2)32
,∂2f
∂x∂y=
−xy(x2 + y2)
32
,∂2f
∂y2=
x2
(x2 + y2)32
Evaluando en (3, 4):
∂f
∂x=
3
5,
∂f
∂x=
4
5,
∂2f
∂x2=
16
125,
∂2f
∂x∂y=−12
125,
∂2f
∂y2=
9
125
∴ p1(x, y) = 5 +3
5(x− 3) +
4
5(y − 4)
p2(x, y) = p1(x, y) +1
2
[16
125(x− 3)2 − 24
125(x− 3)(y − 4) +
9
125(y − 4)2
]Usemos esta información para estimar
√(3, 1)2 + (4, 02)2:
Cerca de (3, 4), el polinomio de grado 1 entrega:
f(x, y) ≈ 1
5[25 + 3(x− 3) + 4(y − 4)]
Luego:
f(3, 1; 4, 02) ≈ 1
5[25 + 3 · (0, 1) + 4 · (0, 02)] = 5, 076
Con el polinomio de grado 2 se obtiene:
f(x, y) ≈ 5, 076 +1
250[16(x− 3)2 − 24(x− 3)(y − 4) + 9(y − 4)2]
MAT023 (2◦ sem. 2011) 63

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
64
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
Luego:
f(3, 1; 4, 02) ≈ 5, 076 +1
250[16 · (0, 1)2 − 24 · (0, 1)(0, 02) + 9 · (0, 02)2]
= 5, 076 +0, 1156
250= 5, 0764624
Ejercicios
Determinar los polinomios de Taylor p1 y p2 para f(x, y) =a) x2y2 en torno a (1, 1) b) sen(xy) en torno a (0, 0) c) xy en torno a (1, 1). Estime el valorde (1, 1)1,2.
MAT023 (2◦ sem. 2011) 64

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
65
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
6. Máximos y Mínimos
Definición 6.1. Sea f : A ⊆ Rn −→ R, ~x0 ∈ D. Se dice que f tiene un mínimo relativo(respectivamente,máximo relativo) en ~x0 si, y sólo si, existe una vecindad V~x0 tal que ∀ ~x ∈ V~x0∩D:
f(~x0) ≤ f(~x) (respectivamente, f(~x) ≤ f(→x0) ).
Análogamente se definen mínimo y máximo absoluto, si la desigualdad se satisface en todo eldominio D de la función f .
Ejemplo
1. La función f : A ⊆ R2 −→ R, f(x, y) = e|x+y| tiene un máximo relativo (y absoluto) en(0, 0).
2. La función f : A ⊆ R2 −→ R, f(x, y) = |x− y| tiene mínimos en todos los (x, y) ∈ R2 :y = x. Es decir, los extremos relativos o absolutos, cuando se alcanzan, no son necesariamenteúnicos.
Teorema 15. Si f : Rn −→ R es diferenciable en V ⊆ Rn, y f alcanza un extremo relativo enx0 ∈ V , entonces ∇f(x0) = 0 (es decir, todas las derivadas parciales son nulas).
Observación
1. El recíproco es falso. Pero esto ya lo sabíamos para funciones de una variable; por ejemplo,la función f : R −→ R, f(x) = x3 satisface que f ′(0) = 0, pero en 0 no se alcanzaningún extremo relativo (ni máximo ni mínimo). Un ejemplo de una función en 2 variables esf : R2 −→ R, f(x, y) = x2 − y2.
2. Los puntos en los cuales el gradiente se anula se llaman puntos críticos.
Teorema 16. Sea f : A ⊆ Rn −→ R, donde f es continua y A es cerrado y acotado. Entonces falcanza su máximo y su mínimo absoluto en A.
Ejemplo
Sea f : D −→ R, D = {(x, y, z) ∈ R3 : ‖(x, y, z)‖ ≤ 1} y f(x, y, z) = x+ y + z. Claramente,f es continua y D es un conjunto cerrado y acotado. Por lo tanto, la función alcanza sus extremosabsolutos en D. Sin embargo, al calcular ∇f vemos que ∇f = (1, 1, 1) 6= (0, 0, 0). Esto nos diceque los extremos de f se encuentran en la frontera de D, y no en su interior.
Desarrollaremos 2 técnicas para encontrar y determinar la naturaleza de los puntos críticos.
6.1. Máximos y Mínimos sin restricciones
El primer criterio se utiliza en dominios abiertos, es decir, en dominios en los cuales podemoscalcular derivadas en todos los puntos. Necesitaremos para ello construir una matriz, conocida comola matriz hessiana de f .
MAT023 (2◦ sem. 2011) 65

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
66
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
Sea f : A ⊆ Rn −→ R, f ∈ C2(A), ~x0 ∈ A y tal que ∇f(~x0) = ~0. Como la función tienesegundas derivadas parciales continuas, esto quiere decir que las derivadas mixtas son iguales, esdecir, Dijf = Djif . Formamos la matriz de las segundas derivadas parciales siguiente:
D11f(~x0) D12f(~x0) · · · D1nf(~x0)D12f(~x0) D22f(~x0) · · · D2nf(~x0). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .D1nf(~x0) D2nf(~x0) · · · Dnnf(~x0)
es la matriz hessiana de f en ~x0.
Observación 6.1. Notamos inmediatamente que la matriz hessiana es simétrica.
Observación 6.2. Esta matriz, formada por las «segundas derivadas» nos servirá, como en el casode una variable, para tener un criterio análogo al criterio de la segunda derivada para funciones deR en R.
Definición 6.2 (Matriz definida positiva). A ∈ Mn×n es una matriz simétrica definida positiva si,y sólo si, para todo ~x no nulo de Rn se tiene:
(x1, x2, . . . , xn)A (x1, x2, . . . , xn)t > 0.
Análogamente, una matriz A ∈ Mn×n es definida negativa si, y solamente si, −A es definidapositiva.
Teorema 17. Sea f : A ⊆ Rn −→ R, f ∈ C2(A), ~x0 ∈ A y tal que ∇f(~x0) = ~0. Entonces,si Hf (~x0) es definida positiva, entonces f tiene un mínimo relativo en ~x0, y si Hf (~x0) es definidanegativa, entonces f tiene un máximo relativo en ~x0.
Criterio para matrices simétricas
¿Qué significa que una matriz sea definida positiva? Presentaremos dos criterios para poderdeterminarlo, para el caso en que la matriz sea simétrica :
1. Una matriz A ∈ Mn×n simétrica es definida positiva si, y sólo si, todos sus valores propiosson positivos.
2. Sea A = (aij) una matriz simétrica de orden n × n. Para cada k, k = 1, · · · , n construyamoslas submatrices
Ak =
a11 · · · a1k. . . . . . . . . . . . .ak1 · · · akk
entonces, A es definida positiva si, y sólo si, ∀k, |Ak| > 0. Es decir, si todos los subdetermi-nantes son positivos.
Este último criterio será el que usaremos para la matriz hessiana. En primer lugar, traduzcamoslo que este criterio nos dice para un par de casos.
MAT023 (2◦ sem. 2011) 66

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
67
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
Si n = 2:
Sea f : R2 −→ R, ~x0 ∈ R2 tal que ∇f(~x0) = ~0. Formamos la matriz hessiana de f en ~x0:
Hf (~x0) =
(D11f(~x0) D12f(~x0)D12f(~x0) D22f(~x0)
)
Entonces, Hf (~x0) es definida positiva ⇐⇒ D11f > 0 y D11fD22f − (D12f)2 > 0, yHf (~x0) es definida negativa ⇐⇒ D11f < 0 y D11fD22f − (D12f)2 > 0.
Resumiendo, podemos decir que si f : R2 −→ R, ~x0 ∈ R2 tal que ∇f(~x0) = ~0 y
D11f(~x0)D22f(~x0)− (D12f(~x0))2 > 0,
entonces
1. D11f(~x0) > 0 =⇒ f tiene un mínimo en ~x0.
2. D11f(~x0) < 0 =⇒ f tiene un máximo en ~x0.
Si n = 3:
Sea f : R3 −→ R, ~x0 ∈ R3 tal que ∇f(~x0) = ~0. Formamos la matriz hessiana de f en ~x0:
Hf (~x0) =
D11f(~x0) D12f(~x0) D13f(~x0)D12f(~x0) D22f(~x0) D23f(~x0)D13f(~x0) D23f(~x0) D33f(~x0)
Por lo tanto, f tiene un mínimo relativo en →x0 si, y sólo si,
1. D11f(~x0) > 0
2. det
(D11f(~x0) D12f(~x0)D12f(~x0) D22f(~x0)
)> 0
3. det Hf (~x0) > 0
y f tiene un máximo relativo en ~x0 si, y sólo si,
1. −D11f(~x0) > 0⇐⇒ D11f(~x0) < 0
2. det
(−D11f(~x0) −D12f(~x0)−D12f(~x0) −D22f(~x0)
)> 0⇐⇒ det
(D11f(~x0) D12f(~x0)D12f(~x0) D22f(~x0)
)> 0
3. det (−Hf (~x0)) > 0 ⇐⇒ det Hf (~x0) < 0
Definición 6.3. Sea f : Rn −→ R, ~x0 ∈ Rn, f ∈ C2 tal que ∇f(~x0) = ~0. Si los subdeterminantesno se anulan y los signos son diferentes a lo señalado arriba, entonces decimos que ~x0 es un puntosilla .
MAT023 (2◦ sem. 2011) 67

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
68
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
Ejemplos
Hallar los extremos locales, si existen, de las siguientes funciones:
1. f(x, y) = x2 − 4xy + y3 + 4y
2. f(x, y) = x3 + y3 − 27x− 12y
3. f(x, y, z) = −x3 + 3xz + 2y − y2 − 3z2
6.2. Máximos y Mínimos sujeto a restricciones
En los problemas clásicos de máximos y mínimos, se trata de determinar el máximo y/o mí-nimo de una función f(x, y) o f(x1, x2, · · · , xn) sujeta a una restricción del tipo g(x, y) = 0 og(x1, x2, · · · , xn) = 0, respectivamente. En el primer caso, es claro que se podría resolver el pro-blema, en teoría, despejando la variable y en la ecuación g(x, y) = 0, y sustituir el valor obtenidoy = ϕ(x).
En términos matemáticos, este tipo de problemas puede mirarse como el de determinar losextremos de funciones definidas sobre conjuntos cerrados y acotados. Para resolverlos, usaremos latécnica conocida como multiplicadores de Lagrange .
Teorema 18. Sea F : Rn −→ R, G : Rn −→ R dos funciones de clase C1, es decir, con primerasderivadas continuas. Si la función F alcanza un extremo en ~x0 en la región de Rn en donde G(~x) = 0,y si ∇G(~x0) 6= 0, entonces ∃λ ∈ R :
∇F (~x0) = λ∇G(~x0)G(~x0) = 0
Observaciones
1. F es la función a maximizar o minimizar y G se denomina usualmente la condición o larestricción.
2. Una formulación equivalente del teorema:Los extremos de la función F (~x) sujetos a la restricción G(~x) = 0, se encuentran en los puntoscríticos de la función L : Rn+1 −→ R, con L(~x, λ) = F (~x) + λG(~x)
Ejemplos
1. Determine máximo y mínimo absolutos de f(x, y, z) = x + y + z, definida en el dominioD = {(x, y, z) ∈ R3 : ‖(x, y, z)‖ ≤ 1}Solución
Notar que ∇f = (1, 1, 1) 6= (0, 0, 0), por lo cual no hay extremos de la función en el interiorde la esfera. Como f es continua en D, que es un cerrado y acotado de R3, los extremos de fdeben encontrarse en la frontera de D, es decir, en los (x, y, z) : x2 + y2 + z2 = 1. Definimosentonces G(x, y, z) = x2 + y2 + z2 − 1 = 0
Aplicando el teorema de Lagrange, ∃λ ∈ R : ∇f = λ∇G, i.e.
(1, 1, 1) = λ(2x, 2y, 2z) y x2 + y2 + z2 − 1 = 0
MAT023 (2◦ sem. 2011) 68

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
69
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
es decir,
1 = 2λx1 = 2λy1 = 2λz1 = x2 + y2 + z2
Elevando al cuadrado las primeras tres ecuaciones y sumándolas obtenemos
3 = 4λ2(x2 + y2 + z2) ⇒ 3 = 4λ2 ⇒ λ = ±√
3
2
λ = −√
3
2, ⇒ x = y = z = − 1√
3⇒ f
(− 1√
3,− 1√
3,− 1√
3
)= − 3√
3= −√
3
λ =
√3
2, ⇒ x = y = z =
1√3⇒ f
(1√3,
1√3,
1√3
)=
3√3
=√
3
Luego, f tiene un máximo en(
1√3, 1√
3, 1√
3
)y un mínimo en
(− 1√
3,− 1√
3,− 1√
3
).
2. Determine el volumen máximo del paralelepípedo recto que se puede inscribir en el elipsoidex2
a2+y2
b2+z2
c2= 1.
Solución
El volumen del paralelepípedo está dado por V (x, y, z) = 8xyz. Como esta función es
continua y la condición G(x, y, z) =x2
a2+y2
b2+z2
c2−1 = 0 es un conjunto cerrado y acotado,
sabemos que podemos encontrar los extremos de V sujetos a G usando los multiplicadores deLagrange:
∃λ ∈ R : ∇f = λ∇G, i.e.
(8yz, 8xz, 8xy) = λ
(2x
a2,2y
b2,2z
c2
)y
x2
a2+y2
b2+z2
c2− 1 = 0 es decir,
8yz = λ2x
a2
8xz = λ2y
b2
8xy = λ2z
c2
1 =x2
a2+y2
b2+z2
c2
Multiplicando la primera ecuación, por x, la segunda por y, la tercera por z y sumándolas,obtenemos:
3 · 8xyz = 2λ
(x2
a2+y2
b2+z2
c2
)= 2λ · 1
MAT023 (2◦ sem. 2011) 69

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
70
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
Si x o y o z = 0, entonces el volumen V = 0, que es mínimo. Supongamos entonces que ningunoes 0. Reemplazando el valor de 2λ en las ecuaciones, obtenemos:
x2 =a2
3, y2 =
b2
3, z2 =
c2
3=⇒ x =
a√3, y =
b√3, z =
c√3
Luego, en(
a√3, b√
3, c√
3
)la función alcanza su máximo, que es VMAX = 8 · abc
3√
3.
3. Considere el plano de ecuación x + 4y + 4z = 39. Encuentre el punto de este plano que seencuentre a distancia mínima de (2, 0, 1).
Solución
La distancia entre (x, y, z) y (2, 0, 1) en R3 viene dada por
d((x, y, z), (2, 0, 1)) =√
(x− 2)2 + (y − 0)2 + (z − 1)2
Como la función raíz cuadrada es monótona, el problema es equivalente a minimizar la funciónsubradical, vale decir, f(x, y, z) = (x− 2)2 + y2 + (z − 1)2, con la restricción que elpunto (x, y, z) ∈ π, es decir, x+ 4y + 4z = 39.
Luego, ∇f = λ∇g, de donde
2(x− 2) = λ2y = 4λ
2(z − 1) = 4λx+ 4y + 4z = 39
Dejando x, y, z en función de λ, reemplazamos en la última ecuación obteniendo λ = 2 dedonde x = 3, y = 4, z = 5.
6.3. Multiplicadores de Lagrange sujeto a dos o más condiciones
Para maximizar F (x, y, z) sujeto a dos condiciones: G1(x, y, z) = 0, G2(x, y, z) = 0 se deberesolver:
∇F (~x) = λ∇G1(~x) + µ∇G2(~x)G1(~x) = 0G2(~x) = 0
Ejemplos
1. Determine los extremos absolutos de f(x, y, z) = x+ 2y + z sujeto a x2 + y2 = 1 y y + z = 1.
2. Hallar los puntos de la curva de intersección de las superficies x2−xy+y2−z2 = 1 y x2+y2 = 1que están más cerca del origen.
MAT023 (2◦ sem. 2011) 70

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
71
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
Ejercicios
1. Determine y grafique el dominio de las siguientes:
(a) f(x, y) =√
36− x2 − y2 (b) f(x, y) =
√x2 + y2 − 16
x
(c) f(x, y) =x+ 1
|y − 1| (d) f(x, y) = ln(xy − 1)
(e) f(x, y) =1√
y −√x(f) f(x, y) =
1− cos(√xy)
y
2. Dibuje las curvas o superficies de nivel correspondientes a los valores de f(x, y) = Kó f(x, y, z) = K :
a) f(x, y) = x2 + y2, K = 0, 1, 4 y 9
b) f(x, y) = x2 − y2, K = 0, 1, 4 y 9
c) f(x, y) = cos(x+ y), K = −1, 0, 12 y 1
d) f(x, y, z) = x2 + y2 + z2, K = 0, 1, 4 y 9
e) f(x, y, z) = x2 + y2 − 4z, K = −8,−4, 0, 4 y 8
3. Determine, si existen, los siguientes límites
(a) lım(x,y)→(0,0)
| senx · sen y||x|+ |y| (b) lım
(x,y)→(0,0)
x2y2
x2y2 + (y − x)2
(c) lım(x,y)→(0,0)
xy sen(y3)
x4 + y4(d) lım
(x,y)→(0,0)
sen(xy3)
x2 + y6
(e) lım(x,y)→(0,0)
y3√|x|
|x|+ y4(f) lım
(x,y)→(0,0)
x3 + y2
|x|+ |y|
(g) lım(x,y)→(0,0)
senx+ sen y
x+ y(h) lım
(x,y)→(1,0)
cos(√xy)− 1
y
(i) lım(x,y)→(1,0)
(x− 1)4y2
(x− 1)8 + y4(j) lım
(x,y)→(0,0)
x2y√x2 + y2
sen(xy)
(k) lım(x,y)→(0,0)
x2y
x2 + y(l) lım
(x,y)→(0,0)
3x2 − y2x2 + y2
(m) lım(x,y)→(0,0)
x2
x2 + 2y2 − x (n) lım(x,y)→(0,0)
x4 + 3x2y2 + 2xy3
(x2 + y2)2
4. Calcule, si existen, los siguientes límites:
(a) lım(x,y)→(1,−1)
|x+ y||x|+ |y| (b) lım
(x,y)→(2,1)
arcsin(xy − 2)
arctan(3xy − 6)
(c) lım(x,y)→(0,0)
tan(x2y)
x2 + y2(d) lım
(x,y)→(0+,1−)
x+ y − 1√x−√1− y
MAT023 (2◦ sem. 2011) 71

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
72
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
5. Sea f(x, y) =
x+ y si |x|+ |y| ≥ 2
1 si |x|+ |y| < 2¿Existe lım
(x,y)→(1,1)f(x, y)?
6. Sea f(x, y) =
(y − 2)2 sen(xy)
x2 + y2 − 4y + 4si (x, y) 6= (0, 2)
α si (x, y) = (0, 2)
Determine α ∈ R, si existe, para que f sea continua en (0,2).
7. Analice la continuidad en R2 de las siguientes funciones :
a) f(x, y) =
{1x sen(x2 + x2y2) si x 6= 0, y ∈ R
0 si x = 0, y ∈ R
b) f(x, y) =
2x4y
(x2 + y2)2si (x, y) 6= (0, 0)
0 si (x, y) = (0, 0)
c) f(x, y) =
{ senxy
xsi x 6= 0
y si x = 0
d) f(x, y) =
{x2 + y2 si x2 > yx2 − y2 si x2 ≤ y
8. Sea f(x, y) =
x sen
(1
y
)si y 6= 0
0 si y = 0
.
Determine si son verdaderas o falsas las siguientes proposiciones:
a) f no es continua en (0,0).b) f es continua en (0,3).c) f no es continua en el eje Y.
9. Determine los valores de m ∈ R, para que f sea continua en (0,0), si
f(x, y) =
x2y2
x2y2 + y −mx si (x, y) 6= (0, 0) ∧ y 6= 0
0 si (x, y) = (0, 0)
10. Analizar la continuidad de f en (a, a), si
f(x, y) =
senx− sen y
tanx− tan ysi tanx 6= tan y
cos3 x si tanx = tan y
MAT023 (2◦ sem. 2011) 72

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
73
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
11. Analizar la continuidad de f en R2 si
f(x, y) =
x2 + y2 si x2 + y2 ≤ 1
0 si x2 + y2 > 1
12. Calcular las derivadas parciales de las siguientes funciones:
(a) f(x, y) = 13x
3 − 3x2y + 3xy2 + y3 (b) f(x, y) =x2 − 2xy
x+ y
(c) f(x, y) = ln (x+ 2√x2 + 3y2) (d) f(x, y, z) = ex
2y − 3ez
(e) f(x, y, z) = exy · 2zx (f) f(x, y) =
x+ y
x− y(g) f(x, y) = ln(x2 + y2) (h) f(x, y) = exy sen(xy)
(i) f(x, y) = xy + yx (j) f(x, y) = x cos
(x
y
)(k) f(x, y) = arctan
(2
x+ y
)(l) f(x, y) = arctanxy
(m) f(x, y, z) = x2ey ln z (n) f(x, y) = exy + xy + yx
13. Sea z = f(x, y). Verifique que∂2z
∂x∂y=
∂2z
∂y∂x, si
a) z = x2 − 4xy + 3y2 b) z = x2e−y2
c) z = ln(x+ y) d) z = x2 cos(y−2)
14. Verifique que f(x, y) = arctan(yx
)satisface la ecuación
∂2f
∂x2+∂2f
∂y2= 0.
15. Analice la continuidad, existencia de derivadas parciales y diferenciabilidad en (0, 0) de lassiguientes funciones:
a) f(x, y) =
xy3
x2 + y2si (x, y) 6= (0, 0)
0 si (x, y) = (0, 0)
b) f(x, y) =
xy2
x2 + y4si (x, y) 6= (0, 0)
0 si (x, y) = (0, 0)
c) f(x, y) =
x2y2
x2 + y2si (x, y) 6= (0, 0)
0 si (x, y) = (0, 0)
MAT023 (2◦ sem. 2011) 73

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
74
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
16. Sea f(x, y) =
x4(y + 2)2
x2 + y2si (x, y) 6= (0,−2)
0 si (x, y) = (0,−2)
a) Analice la continuidad de f en (0,-2).
b) Calcule, si existe,∂f
∂x(0,−2)
c) Analice la diferenciabilidad de f en (0,-2).
17. Sea f(x, y) =
x(x− y)
x+ y, si x+ y 6= 0
0 si x+ y = 0
a) Determine (x, y) : x+ y 6= 0, tales que∂f
∂x(x, y) +
∂f
∂y(x, y) = 0
b) Calcule, si existen, las segundas derivadas parciales de f en el origen.
18. Calcule la derivada de f(x, y) = x4 + x3y2 + y en (1, 1) y en la dirección de la tangentea la curva y = x4.
19. Calcule la derivada direccional de f(x, y) = xy+ x2 + x4y en (1, 1) y en la dirección delvector que forma una ángulo de 60◦ con el eje x.
20. Sea f(x, y) =
x2y
x4 + y2, si (x, y) 6= (0, 0)
0 , si (x, y) = (0, 0)
Probar que f es discontinua en el origen, y calcular la derivada direccional de f en (0, 0) encualquier dirección unitaria −→u .
21. Sea f(x, y) =
x|y|√x2 + y2
, si (x, y) 6= (0, 0)
0 , si (x, y) = (0, 0)
Demuestre que, en el origen, f posee derivada direccional en cualquier dirección. ¿Es f dife-renciable en (0,0)?
22. Encuentre la máxima derivada direccional de f en P , si
a) f(x, y) = 2x2 + 3xy + 4y2, en P (1, 1).
b) f(x, y, z) = e−(x+y+z), en P (5, 2, 3).
MAT023 (2◦ sem. 2011) 74

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
75
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
23. Sea T (x, y, z) = 3x2 + 2y2− 4z la temperatura en el punto (x, y, z). Determine la razónde cambio de T en P = (−1,−3, 2) en dirección a Q = (−4, 1,−2). ¿Cuál es la tasa de máximavariación?.
24. Una hormiga se encuentra en el punto (1, 1, 0) del paraboloide hiperbólico S : z = y2 − x2.¿En cuál sentido del plano XY debe moverse para seguir la cuesta más empinada?
25. Calcular la ecuación del plano tangente a la superficie dada por:
a) f(x, y) = 3x2 + 8xy en el punto (x0, y0) = (1, 0).
b) f(x, y) =√x2 + y2 en el punto (x0, y0) = (1, 2)
c) f(x, y, z) = sen(xyz)− 1
2en el punto
(3,π
6,1
3
)
26. Determinar en qué punto de la superficie z = 3xy−x3−y3 el plano tangente es horizontal,es decir, paralelo al plano z = 0.
27. Determine los puntos de la superficie x2 + 3y2 + 4z2 − 2xy − 16 = 0 en los que el planotangente es paralelo al plano XZ.
28. Demuestre que todo plano tangente a la gráfica de z2 = x2 + y2 pasa por el origen.
29. Pruebe que si u = x2y + y2z + z2x, entonces∂u
∂x+∂u
∂y+∂u
∂z= (x+ y + z)2.
30. Sea f(x, y) =xy
x+ y. Demuestre que : x2
∂2f
∂x2+ 2xy
∂2f
∂x∂y+ y2
∂2f
∂y2= 0
31. Determine y clasifique los puntos críticos de las siguientes funciones en R2:
a) f(x, y) = (y − x)2(y + x)
b) f(x, y) = x3 + 3xy − y3
c) f(x, y) = ex sen y
d) f(x, y) = x2 + xy + y2 + 1x + 1
y
e) f(x, y) = (x2 + 3y2)e−x2−y2
32. Sea f(x, y) = x2 + y2 + Axy. Determine A ∈ R para que f tenga un mínimo relativo en unúnico punto.
33. Determine y clasifique los puntos críticos de las siguientes funciones en R3:
a) f(x, y, z) = x3 + y2 + z3 − 6xy + 6x+ 4y − 3z.
b) f(x, y, z) = x2y − 2x3
3 − y2 + y + z2.
MAT023 (2◦ sem. 2011) 75

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
76
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
34. Probar que el volumen formado por el plano tangente a la superficie xyz = m3, en cualquierpunto, y los planos coordenados es constante.
35. Si z =√
2xy + y2, con 2xy + y2 > 0, hallar
∂2z
∂x∂y(x, y)
36. Calcular la ecuación del plano tangente en el punto (1, 0), a la superficie de ecuación
z = 3x2 + 8xy
37. Hallar una constante c tal que en todo punto de la intersección de las dos esferas:
(x− c)2 + y2 + z2 = 3 x2 + (y − 1)2 + z2 = 1
los planos tangentes correspondientes sean perpendiculares el uno al otro.
38. Demuestre que la superficie de ecuación x2 − 2yz + y3 = 4 es ortogonal a cualquiera de lassuperficies de la familia x2 + 1 = (2− 4a)y2 + az2 en el punto de intersección (1,-1,2).
39. Calcular las derivadas de segundo orden:
a) f(x, y) = x3 + 3x2y + 6xy2 − y3b) 2x4 − 3x2y2 + y4 = z
40. Sea f(x, y) = ϕ(x2 + y2), donde ϕ es diferenciable. Pruebe que:
y∂f
∂x− x∂f
∂y= 0
41. Demuestre que la función u(x, t) satisface la ecuación∂2u
∂t2= a2
∂2u
∂x2para:
a) u(x, t) = ϕ(x− at) + ψ(x+ at) donde ϕ y ψ son funciones de clase C2.b) u(x, t) = sen(akt) sen(kx) con k ∈ Z.
42. Se dice que una función es armónica si verifica que
∇2f =∂2f
∂x2+∂2f
∂y2= 0
Sea f : R2 → R una función de clase C2 armónica y sean
x = eu cos v ∧ y = eu sen v
Consideremos la función g : R2 → R definida como
g(u, v) = f(x(u, v) , y(u, v)).
MAT023 (2◦ sem. 2011) 76

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
77
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
a) Pruebe que (∂g
∂u
)2
+
(∂g
∂v
)2
= e2u
[(∂f
∂x
)2
+
(∂f
∂y
)2]
b) Pruebe que g es armónica.
43. Si x2 = y2 + f(x2 + z2), calcular:
xy∂y
∂x+ yz
∂y
∂x
∂z
∂x− zx∂z
∂x
44. Sea f(x, y) = x2g(x2y). Pruebe que x∂f
∂x− 2y
∂f
∂y= 2f(x, y).
45. Sea f(x, y) = g(x, y)eax+by con∂2g
∂x∂y= 0. Determine los valores de las constantes a y
b para que∂2f
∂x∂y− ∂f
∂x− ∂f
∂y+ f = 0
46. SeaM ⊂ R3 una superficie determinada por la función f(x, y) =1
xy. Encontrar los puntos
de M más cercanos al origen.
47. Encontrar los valores extremos de f(x, y) = x2 + y2 − xy en la región dada por 2x2 + y2 ≤ 1.
48. Con una lámina metálica rectangular de 24 cm. de ancho y 120 cm. de longitud, se quiereconstruir un canal, para lo cual se doblará a lo largo de la lámina, una longitud x en un ánguloθ. Determinar el valor de x y de θ para que el canal conduzca el máximo volumen.
49. Calcular la distancia que hay entre el origen y la superficie de ecuación xy3z2 = 16. Hallartodos los puntos de la superficie que estan a esa distancia.
50. Pruebe que el máximo valor de x2y2z2 bajo la condición x2+y2+z2 = R2 es(R2
3
)3
.
Deduzca de esto que 3√x2y2z2 ≤ x2 + y2 + z2
3.
51. Hallar los valores extremos de la función f(x, y) = cos2(x)+cos2(y) con la condición x−y = π4 .
52. Hallar los extremos de f(x, y, z) = x2 + y2 + z2 six2
a2+y2
b2+z2
c2= 1 con a > 0, b > 0, c > 0.
53. Hallar los valores extremos de f(x, y, z) = x− y + z en la esfera x2 + y2 + z2 = 1
MAT023 (2◦ sem. 2011) 77

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
78
Universidad Técnica Federico Santa MaríaDepartamento de Matemática Verónica Gruenberg Stern
54. Si w = f
(y − xxy
,z − yyz
), probar que
x2∂ w
∂ x+ y2
∂ w
∂ y+ z2
∂ w
∂ z= 0
55. Si u = senx+ f(sen y − senx) , donde f es diferenciable, pruebe que:
cosx · ∂u∂y
(x, y) + cos y · ∂u∂x
(x, y) = cosx · cos y
56. Sea
f(x, y) =
sen(x2y)
|x|+ |y| si (x, y) 6= (0, 0)
0 si (x, y) = (0, 0)
a) ¿Es f continua en (0, 0)?
b) ¿Es f diferenciable en (0, 0)?
c) Determine, si existe,∂f
∂x(1, π2 ).
d) Determine, si existe,∂f
∂−→u (1, π2 ), donde −→u es un vector en la dirección de (1, 1).
e) ¿Existe el plano tangente a z = f(x, y) en (0, 0)?
57. Para cada α ∈ R, considere la función
fα =
x4y4
(x4 + x2 + y2)αsi (x, y) 6= (0, 0)
0 si (x, y) = (0, 0)
a) Determine A = {α ∈ R : fα es continua en (0, 0)}.
b) Determine B =
{α ∈ R :
∂fα∂x
(0, 0) ∧ ∂fα∂y
(0, 0) existen}.
c) Determine C = {α ∈ R : fα es diferenciable en (0, 0)}.
MAT023 (2◦ sem. 2011) 78

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
79
Índice
1. Nociones de Topología en el Espacio Euclideano Rn 1
2. Funciones Reales de Varias Variables 92.1. Funciones escalares de Varias Variables . . . . . . . . . . . . . . . . . . . . . . . . . . 92.2. Funciones Vectoriales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.3. Curvas y Superficies de Nivel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3. Límites y Continuidad 213.1. Algebra de Límites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.2. Continuidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.3. Propiedades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293.4. Cambio de variable. Caso particular: Coordenadas Polares . . . . . . . . . . . . . . . 323.5. Límites y Continuidad de Funciones de Rn −→ Rm . . . . . . . . . . . . . . . . . . . 343.6. Derivadas Parciales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343.7. Interpretación Geométrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403.8. Derivadas parciales de orden superior . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4. Diferenciabilidad 424.1. Diferenciabilidad de funciones de Rn −→ R . . . . . . . . . . . . . . . . . . . . . . . 424.2. Derivada Direccional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 454.3. Diferenciabilidad de funciones de Rn −→ Rm . . . . . . . . . . . . . . . . . . . . . . 48
5. Regla de la Cadena 495.1. Derivadas Implícitas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 555.2. Teoremas de la función inversa y de la función implícita . . . . . . . . . . . . . . . . 56
5.2.1. Teorema de la función inversa . . . . . . . . . . . . . . . . . . . . . . . . . . . 565.2.2. Teorema de la función implícita . . . . . . . . . . . . . . . . . . . . . . . . . . 58
5.3. Teorema de Taylor para funciones de varias variables . . . . . . . . . . . . . . . . . . 61
6. Máximos y Mínimos 656.1. Máximos y Mínimos sin restricciones . . . . . . . . . . . . . . . . . . . . . . . . . . . 656.2. Máximos y Mínimos sujeto a restricciones . . . . . . . . . . . . . . . . . . . . . . . . 686.3. Multiplicadores de Lagrange sujeto a dos o más condiciones . . . . . . . . . . . . . . 70
Índice de Materias 80

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
80
Índice de Materias
bolaabierta, 3cerrada, 3reducida, 21
conjuntoabierto, 4cerrado, 5
continuidaden un punto, véase función continuaen una región, véase función continua
coordenadas polares, 32curva
de contorno, véase curva de nivelde nivel, 15
derivadadireccional, 45implícita, 55parcial, 34de segundo orden, 40interpretación geométrica, 40
desigualdadde Cauchy–Schwarz, 2triangular, 2
diferencial, 42, 48distancia, 1
espacio vectorial euclideano, 1extremo
relativo, 65
funcióncontinuaen un punto, 27en una región, 28
diferenciable, 42, 48
gradiente, 39gradiente
a una superficie, 53gráfico
de una funciónde variables, 10
jacobiano, 56
límitedefinición, 21iterado, 25unicidad, 24
matrizdefinida positiva, 66hessiana, 65jacobiana, 42, 48
máximoabsoluto, 65relativo, 65
mínimoabsoluto, 65relativo, 65
multiplicadoresde Lagrange, 68
norma, 1
plano tangente, 46polinomio
de Taylor, 62producto interior, 1punto
crítico, 65de acumulación, 5exterior, 6frontera, 6interior, 6silla, 67
razónde cambio, 45
recta normal, 47región, 7regla de la cadena, 49
superficiede nivel, véase curva de nivel
Taylorpolinomio de, 62

Univ
ersi
dad
Técnic
aFederic
oSanta
María
� �� �
81
resto de, 62Teorema de, 62
teoremade la función implícita, 58de la función inversa, 56de Taylor, 61del acotamiento, 27
del gradiente, 46
vecindadabierta, véase bola abiertacerrada, véase bola cerrada
vectorgradiente, 39unitario, 45