apontamentos de máquinas eléctrica · pdf filemáquinas eléctricas...
TRANSCRIPT
Máquinas Eléctricas José Dores Costa
1
ENIDH
Apontamentos de
Máquinas Eléctrica
José Dores Costa
2010

Máquinas Eléctricas José Dores Costa
2
Nota aos leitores
Estes apontamentos destinam-se a apoiar o estudo das disciplinas de Máquinas Eléctricas e
Accionamentos dos cursos de Engenharia de Sistemas Electrónicos Marítimos e de
Engenharia de Máquinas Marítimas. As matérias são expostas com a preocupação de serem
uma primeira abordagem ao estudo das máquinas eléctricas e dos seus accionamentos, com
natural ênfase no estudo dos circuitos eléctricos e magnéticos que caracterizam as máquinas
eléctricas, e os circuitos electrónicos dos sistemas que as controlam.
Estes apontamentos são uma colectânea organizada de diversas notas redigidas em tempos
diferentes para apoio das aulas, especialmente sobre máquinas eléctricas. Estes apontamentos
não são estanques e, sobre muitas matérias, não prescindem o estudo da bibliografia
recomendada. No fim de cada capítulo e no final destas folhas, apresenta-se uma lista
bibliográfica sobre a matéria aqui apresentada. A leitura de alguns desses livros é muito
recomendada para o estudo aprofundado das matérias expostas.
De qualquer forma, os apontamentos foram feitos para os alunos com o intuito de servirem
como orientação do estudo, tendo em conta a exposição e a sequência que adopto para estas
matérias. Espero que deles possam tirar o melhor proveito.
José Dores Costa
Fevereiro de 2011

Máquinas Eléctricas José Dores Costa
3
ÍNDICE
LLiissttaa ddaass FFiigguurraass 5 LLiissttaa ddaass TTaabbeellaass 8 LLiissttaa ddee AAbbrreevviiaattuurraass 8
CAPÍTULO 1. 9 INTRODUÇÃO 9
1.1 Objectivo 9 1.2 Nota histórica 10
CAPÍTULO 2. 12 CIRCUITOS MAGNÉTICOS 12
2.1 Campo magnético 12 2.2 Acoplamento magnético 20 2.3 Problemas 27
CAPÍTULO 3. 30 TRANSFORMADOR 30
3.1 Introdução 30 3.2 Transformador ideal 33 3.3 Transformador com perdas 35 3.4 Transformador reduzido 39 3.5 Ensaios do transformador 43 3.6 Valores por unidade (pu) 45 3.7 Problemas 52
CAPÍTULO 4. 54 SISTEMAS TRIFÁSICOS 54
4.1 Tensões e correntes 54 4.2 Potência trifásica 61 4.3 Grandezas não sinusoidais 62 4.4 Problemas 65
CAPÍTULO 5. 68 CONVERSÃO ELECTROMECÂNICA DE ENERGIA 68
5.1 Campo magnético girante 68 5.2 Conversores electromecânicos 73 5.3 Problemas 76
CAPÍTULO 6. 78 MÁQUINAS ASSÍNCRONAS 78
6.1 Introdução 78 6.2 Constituição das máquinas assíncronas 79 6.3 Princípio de funcionamento 81 6.4 Circuito equivalente 83 6.5 Circuito equivalente de Thevenin 87 6.6 Ensaios em vazio e com rotor bloqueado 91 6.7 Arranque e variação da velocidade 91 6.8 Problemas 94 6.9 ANEXO: Modelo dinâmico da máquina assíncrona 95
1. Desenvolvimento do modelo 95 2. Simulação do Gerador Assíncrono com Gaiola 101 3. Resultados da Simulação 103 4. Conclusões 109

Máquinas Eléctricas José Dores Costa
4
5. Bibliografia 109 CAPÍTULO 7. 110 MÁQUINAS SÍNCRONAS 110
7.1 Introdução 110 7.2 Reacção do induzido 114 7.3 Característica em vazio 115 7.4 Característica em curto-circuito 116 7.5 Circuito eléctrico equivalente 116 7.6 Coeficientes de indução 119 7.7 Funcionamento em carga 122 7.8 Características em regime estacionário 129 7.9 Curto-circuito simétrico 130 7.10 Máquinas de relutancia variável. 131 7.11 Funcionamento de alternadores em paralelo 132 7.12 Problemas 136
CAPÍTULO 8. 138 TRANSFORMADAS DE CLARKE E DE PARK 138
8.1 Introdução 138 8.2 Transformada de Clarke 139 8.3 Transformada de Park 143 8.4 Transformada dq0 num sistema trifásico 146 8.5 Bibliografia: 149
Máquinas Eléctricas José Dores Costa
5
LL iissttaa ddaass FFiigguurr aass Fig. 2.1: Regra da mão direita................................................................................................. 12 Fig. 2.2: Força que actua sobre um condutor percorrido pela corrente I. ............................... 13 Fig. 2.3: Diferença de potencial induzida pelo movimento. ................................................... 14 Fig. 2.4: Curva de magnetização............................................................................................. 16 Fig. 2.5: Ciclo de histerese...................................................................................................... 16 Fig. 2.6: Circuito magnético toroidal. ..................................................................................... 17 Fig. 2.7: Densidade de energia magnética; ............................................................................. 18 Fig. 2.8: Acoplamento magnético entre condutores. .............................................................. 21 Fig. 2.9: Bobinas com acoplamento magnético. ..................................................................... 23 Fig. 3.1: Constituição de um transformador monofásico........................................................ 30 Fig. 3.2: Transformadores de pequena potência; .................................................................... 31 Fig. 3.3: Produção e distribuição de energia eléctrica. ........................................................... 32 Fig. 3.4: Transformador de alta tensão. .................................................................................. 32 Fig. 3.5: Transformador ideal. ................................................................................................ 34 Fig. 3.6: Modelo eléctrico do transformador. ......................................................................... 36 Fig. 3.7: Diagrama vectorial em vazio.................................................................................... 37 Fig. 3.8: Modelo do transformador reduzido ao primário. ..................................................... 40 Fig. 3.9: Circuito equivalente do transformador reduzido ao primário. .................................41 Fig. 3.10: Circuito equivalente simplificado reduzido ao primário. ....................................... 42 Fig. 3.11: Circuito equivalente simplificado: (a) em vazio; (b) em curto-circuito. ................ 42 Fig. 3.12: Ensaios do transformador: (a) em vazio; (b) em curto-circuito. ............................ 43 Fig. 3.13: Transformador monofásico do exemplo 3.1........................................................... 46 Fig. 3.14: Circuito da Fig. 3.13 em valores pu. ...................................................................... 47 Fig. 3.15: Circuito equivalente do transformador reduzido ao primário no ensaio de curto-
circuito. ........................................................................................................................... 47 Fig. 3.16: Impedância de curto-circuito.................................................................................. 49 Fig. 3.17: Circuito equivalente simplificado reduzido ao primário. ....................................... 49 Fig. 3.18: Característica externa. ............................................................................................ 50 Fig. 3.19: Circuito equivalente simplificado........................................................................... 50 Fig. 3.20: Diagrama vectorial das tensões. ............................................................................. 51 Fig. 4.1: Máquina eléctrica trifásica. ...................................................................................... 54 Fig. 4.2: Sistema de uma espira; (a) variação do fluxo devido ao movimento;...................... 55 Fig. 4.3: Fem induzidas; (a) diagrama temporal; (b) diagrama vectorial. .............................. 55 Fig. 4.4: Três circuitos monofásicos independentes............................................................... 56 Fig. 4.5: Sistema trifásico com condutor de neutro................................................................ 57 Fig. 4.6: Tensões trifásicas; (a) esquema; (b) diagrama vectorial. ......................................... 58 Fig. 4.7: Alternador com ligação em triângulo. ...................................................................... 58 Fig. 4.8: Diagramas vectoriais das correntes nas linhas e nas fases. ...................................... 60 Fig. 4.9: Sistemas de cargas em estrela e em triângulo. ......................................................... 61 Fig. 5.1: Campo magnético numa espira. ............................................................................... 68 Fig. 5.2: Campo magnético em duas espiras perpendiculares. ............................................... 69 Fig. 5.3: Rotação do íman no campo magnético girante......................................................... 70 Fig. 5.4: Sistema de bobinas trifásico. .................................................................................... 71 Fig. 5.5: Os campos magnéticos das três fases. ...................................................................... 72 Fig. 5.6: Reacção do induzido para t=π/2ω. ........................................................................... 72 Fig. 5.7: Conversor electromecânico de energia..................................................................... 73
Máquinas Eléctricas José Dores Costa
6
Fig. 5.8: Sistema rotativo electromecânico............................................................................. 74 Fig. 6.1: Bobina num campo magnético girante. .................................................................... 78 Fig. 6.2: Constituição de máquinas de indução. ..................................................................... 80 Fig. 6.3: Pormenor do rotor em gaiola de esquilo................................................................... 81 Fig. 6.4: Motor monofásico com condensador. ...................................................................... 81 Fig. 6.5: Circuito equivalente duma fase do estator................................................................ 83 Fig. 6.6: Circuito equivalente/fase da máquina assíncrona..................................................... 84 Fig. 6.7: Trânsito de potência numa máquina assíncrona....................................................... 85 Fig. 6.8: Trânsito de potência no circuito eléctrico equivalente. ............................................ 85 Fig. 6.9: Circuito eléctrico do exemplo 6.1. ........................................................................... 86 Fig. 6.10: dipólo equivalente de Thevenin.............................................................................. 88 Fig. 6.11: característica binário-velocidade da máquina de indução. ..................................... 89 Fig. 6.12: variação da característica de binário com a resistência rotórica............................. 90 Fig. 6.13: arrancador estrela-triângulo convencional. ............................................................ 92 Fig. 6.14:: Identificação dos bornes de ligação....................................................................... 93 Fig. 6.15:: Esquemas de ligação. ............................................................................................ 93 Fig. 7.1: Esquema simplificado de um alternador trifásico .................................................. 110 Fig. 7.2: Tipos de rotor; (a) pólos salientes; (b) cilíndrico. .................................................. 112 Fig. 7.3: Esquema de um alternador trifásico com excitação própria................................... 113 Fig. 7.4: Trânsito de potências no alternador síncrono......................................................... 113 Fig. 7.5: Característica em vazio (com velocidade constante).............................................. 115 Fig. 7.6: Característica de curto-circuito (com velocidade constante).................................. 116 Fig. 7.7: Modelo eléctrico, por fase, da máquina síncrona em regime estacionário............. 117 Fig. 7.8: Cálculo das reactâncias síncronas. ......................................................................... 118 Fig. 7.9: Eixos magnéticos dos enrolamentos....................................................................... 119 Fig. 7.10: Modelo da máquina com rotor cilíndrico. ............................................................ 120 Fig. 7.11: Fluxo numa máquina de pólos salientes; (a) segundo o eixo directo; (b) segundo o
eixo de quadratura; (c) eixos directo e de quadratura. .................................................. 121 Fig. 7.12: componentes nos eixos dq da corrente na armadura. ........................................... 122 Fig. 7.13: Diagramas vectoriais para o circuito da Fig. 7.10; (a) corrente em atraso; (b)
corrente em avanço. ...................................................................................................... 124 Fig. 7.14: Diagrama vectorial para um gerador com pólos salientes.................................... 125 Fig. 7.15: Diagrama vectorial para um gerador com rotor cilíndrico. .................................. 125 Fig. 7.16: Funcionamento da máquina de rotor cilíndrico e o ângulo de potência............... 126 Fig. 7.17: Potência activa e ângulo de potência da máquina de pólos salientes. .................. 128 Fig. 7.18: Característica de regulação................................................................................... 129 Fig. 7.19: Características externas. ....................................................................................... 130 Fig. 7.20: Corrente de curto-circuito..................................................................................... 131 Fig. 7.21: máquina síncrona de relutância variável.............................................................. 132 Fig. 7.22: Gerador síncrono ligado à rede............................................................................. 133 Fig. 7.23: sincronoscópio...................................................................................................... 133 Fig. 7.24: Esquema de um alternador sem escovas (brushless generator). .......................... 134 Fig. 7.25: circuito de regulação da corrente de campo. ........................................................ 135 Fig.8.1: Campo magnético girante criado pelas correntes trifásicas no instante t................ 138 Fig.8.2: Campo magnético girante criado pelas correntes bifásicas com fase α. ................. 139 Fig.8.3: Sistemas de eixos (α,β). .......................................................................................... 141 Fig. 8.4: componentes (α, β)................................................................................................. 142 Fig.8.5: Esquema simplificado da máquina síncrona e os seus sistemas de eixos. .............. 143 Fig.8.6: Representação de is nos dois sistemas de eixos....................................................... 144

Máquinas Eléctricas José Dores Costa
7
Fig.8.7: Sequencia da transformação dos eixos (a, b, c) para os eixos (d, q). ...................... 145 Fig.8.8: Circuito RL equivalente a uma bobina. ................................................................... 147

Máquinas Eléctricas José Dores Costa
8
LL iissttaa ddaass TTaabbeellaass Tabela 2.1: Unidades no SI..................................................................................................... 27
LL iissttaa ddee AAbbrr eevviiaattuurr aass CA Corrente Alterna
CC Corrente Contínua
fem Força electromotriz
fmm Força magnetomotriz
pu Por Unidade rpm rotações por minuto rps rotações por segundo

Máquinas Eléctricas José Dores Costa
9
CAPÍTULO 1.
INTRODUÇÃO
1.1 Objectivo Os fenómenos eléctricos e magnéticos são interdependentes e aparecem na natureza estreitamente interligados. Esses fenómenos constituem o aspecto visível daquilo que se designa por campo electromagnético. A electrotecnia estuda as aplicações do campo electromagnético e umas delas são os conversores de energia electromagnética. Duma maneira simplificada, poderemos dizer que os conversores de energia que aqui interessam podem ser electromagnéticos, electromecânicos e electrónicos. As máquinas eléctricas podem ser encaradas como conversores de energia. No caso mais usual, as máquinas eléctricas têm partes móveis, e a conversão dá-se entre energia electromagnética e energia mecânica, e vice-versa. Por isso, podem ser consideradas como ser conversores electromagnético-mecânicos.
O campo electromagnético é uma forma de matéria. Onde ele existe observam-se fenómenos característicos cuja sistematização teórica foi apresentada por James Clerk Maxwell (1831-1879) recorrendo às célebres equações de Maxwell, publicadas em 1873.
O campo eléctrico é criado por cargas eléctricas, e o campo magnético é criado por cargas eléctricas em movimento, ou seja, por correntes eléctricas. As cargas eléctricas movem-se devido a diferenças de potencial eléctrico. As correntes eléctricas que daí resultam criam campos magnéticos que, se forem variáveis no tempo, originam por sua vez diferenças de potencial eléctrico nos condutores eléctricos que estão na sua proximidade. Esta interligação
As máquinas eléctricas utilizam campos magnéticos permanentes (criados por imanes), ou criados por correntes eléctricas (electroímanes). Da interacção entre campos magnéticos e correntes eléctricas resultam forças. Estas forças originam trabalho mecânico. As máquinas eléctricas com partes móveis resultam daquelas interacções. Todavia, uma das máquinas que estudaremos é o transformador. Apesar deste equipamento não ter partes móveis, e a conversão de energia ser puramente electromagnética, ele partilha com as outras máquinas parte dos mesmos princípios e serve de base para a análise e modelização das outras máquinas.
Os transformadores e as máquinas eléctricas com partes móveis usam a lei geral da indução e partem do mesmo princípio: utilizam o campo magnético como meio para a transferência e conversão de energia. Por este facto, torna-se importante compreender-se o comportamento e as propriedades dos materiais magnéticos que são usados na construção destes equipamentos e a teoria do electromagnetismo estudada nas unidades curriculares de física.
Este texto inicia-se com uma breve nota histórica sobre o electromagnetismo. No capítulo 2, faz-se uma revisão dos circuitos magnéticos. No capítulo 3 estudam-se os transformadores. O capítulo 4 refere-se aos sistemas trifásicos industriais e à criação de campos magnéticos girantes. No capítulo 5 introduz-se o princípio de funcionamento das máquinas eléctricas rotativas. No capítulo 6 estudam-se as máquinas eléctricas assíncronas e no capítulo 7 as máquinas eléctricas síncronas. Finalmente, o capítulo 8 é dedicado às máquinas de corrente

Máquinas Eléctricas José Dores Costa
10
contínua. O capítulo 9, dirá respeito aos circuitos electrónicos que são utilizados nos accionamentos das máquinas eléctricas rotativas.
No texto, por norma utiliza-se o sistema internacional de unidades (SI). Este sistema tem três unidades mecânicas fundamentais: o metro (m), o quilograma-massa (kg) e o segundo (s). A unidade de força é o newton (N), a unidade de energia é o joule (J) e a de potência é o watt (W). A unidade fundamental da carga eléctrica é o coulomb (C) e a da corrente eléctrica é o ampére (A). O sistema SI é ainda racionalizado: em muitas equações verifica-se a existência do factor 4π quando se consideram geometrias cilíndricas ou esféricas. Para simplificar os cálculos em muitas equações é introduzido o factor π41 .
1.2 Nota histórica
A relação entre magnetismo e electricidade foi descoberta em 1819 por Oersted (Hans Christian Oersted, 1775-1836). Este cientista dinamarquês descobriu que a corrente eléctrica (cargas eléctricas em movimento) que percorre um condutor cria um campo magnético nas proximidades desse condutor. O fenómeno foi quantificado posteriormente por Ampére (André Ampére, 1775-1836), que também sugeriu que o magnetismo natural (na magnetite), fosse devido a correntes eléctricas microscópicas nesse mineral. Em 1820 Faraday (Michael Faraday, 1791-1867) quantificou a interacção entre a corrente eléctrica e o campo magnético dando origem à lei que tem o seu nome. Ampére e Henry (Joseph Henry, 1797-1878) demonstraram, independentemente um do outro, que se podia produzir uma corrente eléctrica pelo movimento relativo entre um campo magnético e um circuito eléctrico próximos. Em resultado disto, estavam criadas as bases teóricas para a produção de energia eléctrica em larga escala.
Conhecedor dos trabalhos de Faraday e de Ampére, Maxwell apresentou em 1873 uma teoria integrada sobre o campo electromagnético. O seu formalismo, consubstanciado nas conhecidas equações de Maxwell, constitui a teoria base do electromagnetismo. Trata-se de um trabalho que, fazendo a cúpula sobre os trabalhos anteriores de outros cientistas, permitiu o desenvolvimento de novas áreas, por exemplo, a propagação das ondas electromagnéticas (telecomunicações e óptica) e das máquinas eléctricas, e que mostrou estar conforme a teoria da relatividade apresentada por Einstein em 1905.
O electromagnetismo tem importantes implicações no modo de vida e no desenvolvimento tecnológico actuais. Refira-se, por exemplo, a produção e a distribuição de energia eléctrica, iniciadas nos finais do século XIX, que proporcionaram a energia necessária para a actividade industrial e o bem-estar das populações. Nesta área, destacam-se os trabalhos de Thomas Edison (1847-1931) e de Nikola Tesla (1856-1943). Finalmente, refira-se também a descoberta do transistor em 1948 por Jonh Bardeen, Walter Brattain e William Schokley, pela qual receberam o prémio Nobel em 1956.
Desde os salões do iluminismo até à descoberta do transistor, foi dado um grande passo para a humanidade. Estas descobertas no campo do electromagnetismo estão na base da revolução criada pelas máquinas eléctricas e pela produção, conversão e distribuição da energia eléctrica que estão na base da sociedade industrial em que vivemos.
Mesmo sem notarmos, as máquinas eléctricas fazem parte do mundo industrializado em que vivemos. Elas são utilizadas nos electrodomésticos, nos transportes públicos, nos elevadores

Máquinas Eléctricas José Dores Costa
11
e escadas rolantes, em sistemas de bombagem, na produção e distribuição de energia eléctrica, tanto por meios convencionais que usam combustíveis fósseis como nos sistemas que usam as energias renováveis. E são também utilizadas nos automóveis, meios de transporte e na propulsão de navios.
Máquinas Eléctricas José Dores Costa
12
CAPÍTULO 2. CIRCUITOS MAGNÉTICOS
2.1 Campo magnético
O campo magnético é uma forma de matéria e manifesta-se, entre outros fenómenos, pelas forças mecânicas que actuam sobre materiais ferrosos e cargas eléctricas em movimento. O campo magnético é criado por correntes eléctricas e é quantificado fisicamente por duas grandezas vectoriais:
- campo de indução magnética, Br
;
- campo de excitação magnética, Hr
.
O campo de indução magnética, ou simplesmente campo Br
, tem um carácter força e está associado à força que actua uma carga eléctrica, q, que se move com velocidade v
r no
interior desse campo:
)( BvFrrr
×= q (2.1)
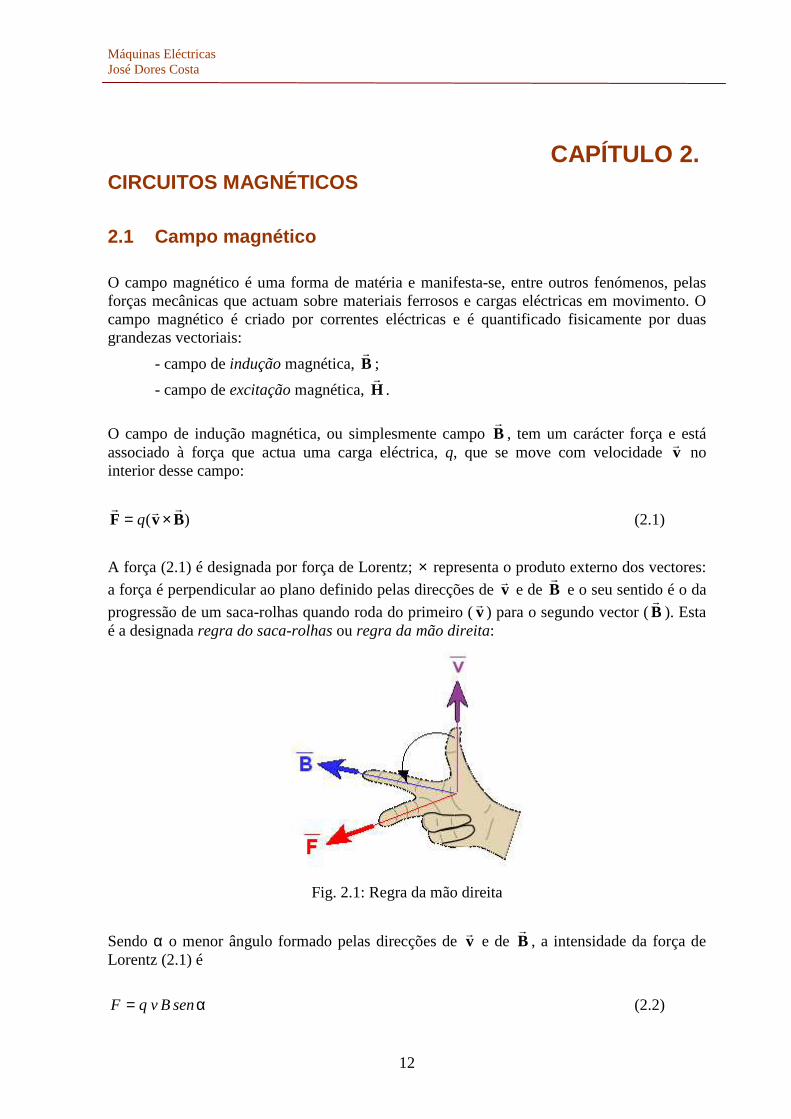
A força (2.1) é designada por força de Lorentz; × representa o produto externo dos vectores:
a força é perpendicular ao plano definido pelas direcções de vr
e de Br
e o seu sentido é o da
progressão de um saca-rolhas quando roda do primeiro (vr
) para o segundo vector (Br
). Esta é a designada regra do saca-rolhas ou regra da mão direita:
Fig. 2.1: Regra da mão direita
Sendo α o menor ângulo formado pelas direcções de vr
e de Br
, a intensidade da força de Lorentz (2.1) é
α= senBvqF (2.2)
Máquinas Eléctricas José Dores Costa
13
A força de Lorentz não é indicada para descrever a acção dum campo magnético sobre cargas eléctricas num meio condutor metálico. Porque cargas eléctricas em movimento dão origem a correntes eléctricas, é preferível considerar nesse caso o efeito do campo magnético sobre um condutor eléctrico percorrido por uma corrente de intensidade I. Considerando que a corrente eléctrica é igual à derivada da carga em ordem ao tempo,
t
qi
d
d= (2.3)
e introduzindo (2.3) em (2.1), conclui-se que a força elementar que actua um condutor elementar de comprimento dl percorrido por uma corrente de intensidade I é dada por
)( BdldFr
×= I (2.4)
Para um condutor rectilíneo de comprimento L, o integral de (2.4) conduz a
)( BLFrr
×= I (2.5)
Sendo α o menor ângulo formado pelas direcções de Lr
I e de Br
, a intensidade da força (2.5) é
α= senLBIF (2.6)
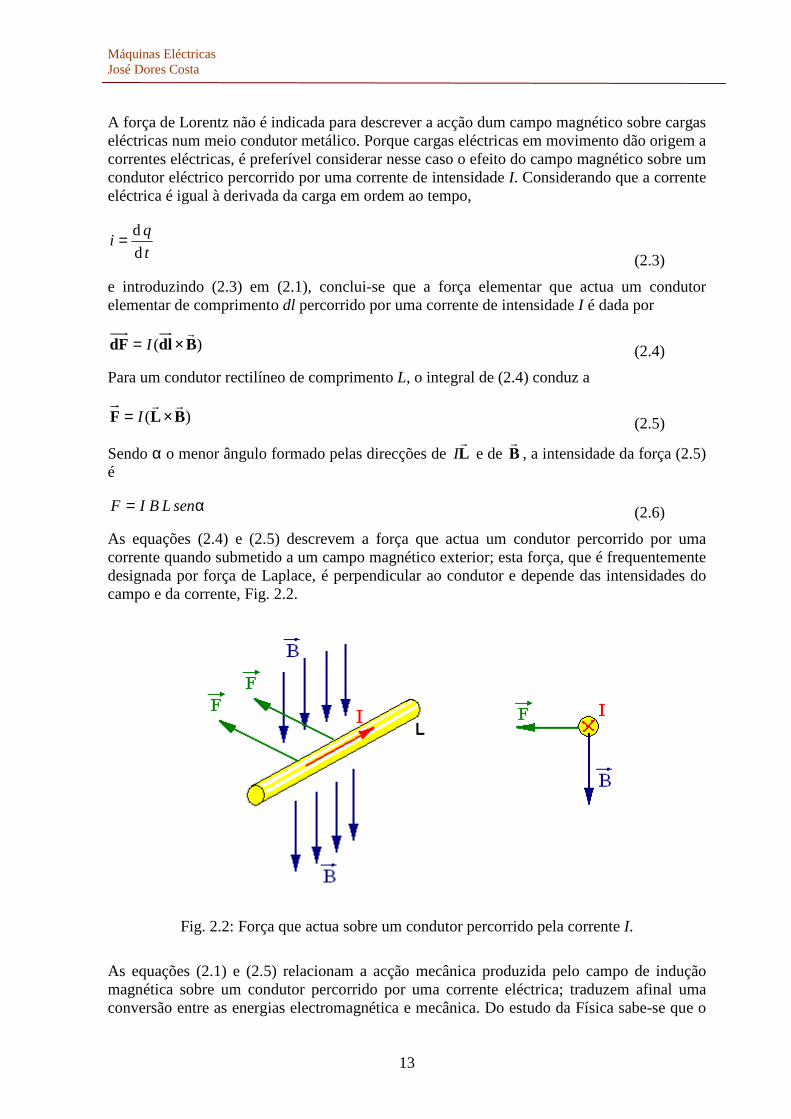
As equações (2.4) e (2.5) descrevem a força que actua um condutor percorrido por uma corrente quando submetido a um campo magnético exterior; esta força, que é frequentemente designada por força de Laplace, é perpendicular ao condutor e depende das intensidades do campo e da corrente, Fig. 2.2.
Fig. 2.2: Força que actua sobre um condutor percorrido pela corrente I.
As equações (2.1) e (2.5) relacionam a acção mecânica produzida pelo campo de indução magnética sobre um condutor percorrido por uma corrente eléctrica; traduzem afinal uma conversão entre as energias electromagnética e mecânica. Do estudo da Física sabe-se que o
Máquinas Eléctricas José Dores Costa
14
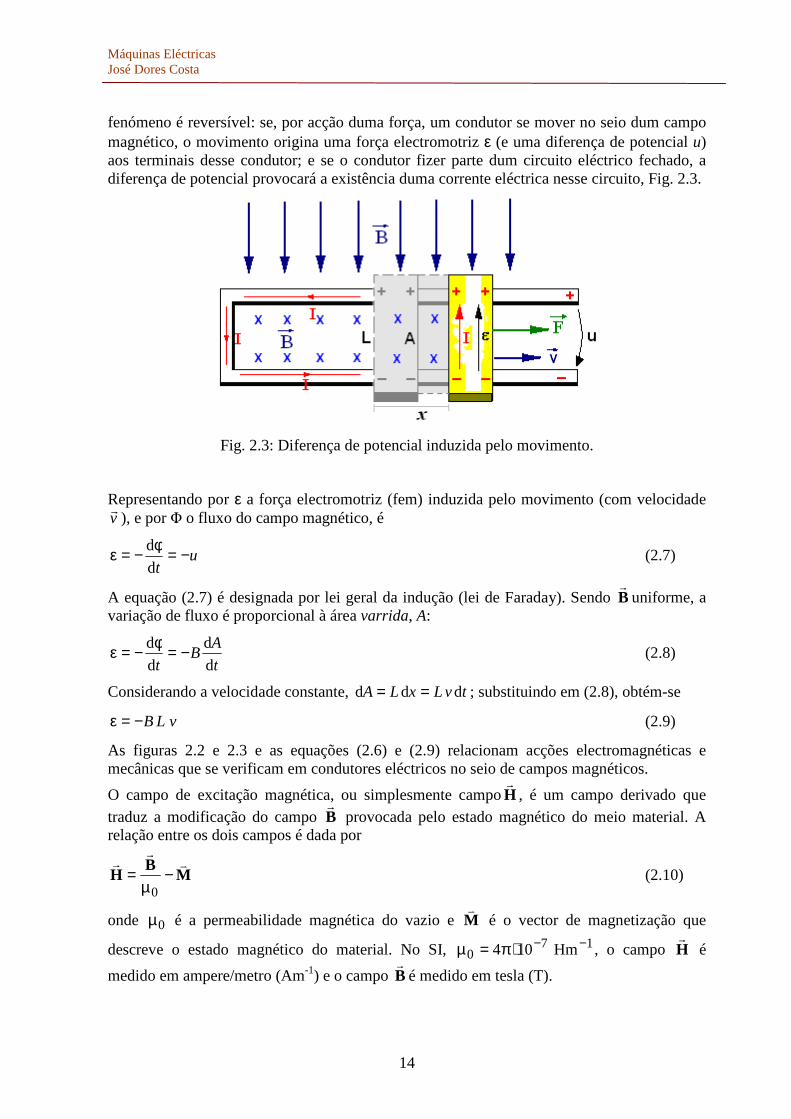
fenómeno é reversível: se, por acção duma força, um condutor se mover no seio dum campo magnético, o movimento origina uma força electromotriz ε (e uma diferença de potencial u) aos terminais desse condutor; e se o condutor fizer parte dum circuito eléctrico fechado, a diferença de potencial provocará a existência duma corrente eléctrica nesse circuito, Fig. 2.3.
Fig. 2.3: Diferença de potencial induzida pelo movimento.
Representando por ε a força electromotriz (fem) induzida pelo movimento (com velocidade vr
), e por Φ o fluxo do campo magnético, é
ut
−=φ−=εd
d (2.7)
A equação (2.7) é designada por lei geral da indução (lei de Faraday). Sendo Br
uniforme, a variação de fluxo é proporcional à área varrida, A:
t
AB
t d
d
d
d −=φ−=ε (2.8)
Considerando a velocidade constante, tvLxLA ddd == ; substituindo em (2.8), obtém-se
vLB−=ε (2.9)
As figuras 2.2 e 2.3 e as equações (2.6) e (2.9) relacionam acções electromagnéticas e mecânicas que se verificam em condutores eléctricos no seio de campos magnéticos.
O campo de excitação magnética, ou simplesmente campoHr
, é um campo derivado que traduz a modificação do campo B
r provocada pelo estado magnético do meio material. A
relação entre os dois campos é dada por
MB
Hv
rr
−µ
=0
(2.10)
onde 0µ é a permeabilidade magnética do vazio e Mv
é o vector de magnetização que
descreve o estado magnético do material. No SI, 170 Hm104 −−⋅π=µ , o campo H
r é
medido em ampere/metro (Am-1) e o campo Br
é medido em tesla (T).

Máquinas Eléctricas José Dores Costa
15
Fluxo de uma grandeza vectorial O fluxo elementar do campo magnético, dφ, é proporcional ao número de linhas de força do campo que atravessam a projecção da superfície dS sobre um plano
perpendicular à direcção de →B .
∫∫→→
==SS
Sd.d Bφφ (2.11a)
A noção de fluxo é aplicável a qualquer grandeza vectorial, não importando a sua natureza física, e está associado à noção de caudal. No sentido do escoamento, isto é,
na direcção da normal →Sd , o fluxo é positivo, e no sentido inverso é negativo.
O fluxo do campo magnético através duma superfície S fechada é nulo:
∫∫→→===
S
S 0d.dS
Bφφ (2.11b)
Quando sujeitos a um campo magnético exterior Br
suficientemente intenso, existem materiais cujos momentos magnéticos dos electrões tendem a orientar-se segundo direcções bem definidas em relação ao campo magnético exterior; neste caso a magnetização, M
v, não
é nula, e se for proporcional a B, a relação entre B e H pode ser escrita na forma
HBrr
µ= (2.12)
onde µ é a permeabilidade magnética do material: 0µµ=µ r , sendo rµ uma constante
adimensional designada por permeabilidade magnética relativa desse material.
Em muitos materiais, a relação entre Br
e Mv
não é simples, depende da intensidade de Br
, e (2.12) não traduz uma relação linear. Por exemplo, na Fig. 2.4 representa-se a relação entre B e H para um material ferromagnético.
Na curva de magnetização da Fig. 2.4 verifica-se que para valores crescentes de H, no intervalo [0, H1], a relação entre B e H é aproximadamente linear e que no intervalo [H1, H2] não o é. Verifica-se também que os valores de B de H não coincidem nas curvas crescentes e decrescentes de H. Este fenómeno é designado por histerese. Na curva decrescente, quando H se anula (H=0) o material mantém um campo magnético residual, Br e para se anular a magnetização do material é necessário inverter o sinal de H até ao valor Hc designado por campo coercivo.
A histerese é comum a todos os materiais ferromagnéticos e tem origem na conversão irreversível entre a energia magnética e energia térmica que se observa pelo aquecimento do material quando é magnetizado. Ao variar continuadamente a excitação entre –H2 a +H2, o as trocas de energia estabilizam e obtém-se a curva da Fig. 2.5 a que se dá o nome de ciclo de histerese.
Máquinas Eléctricas José Dores Costa
16
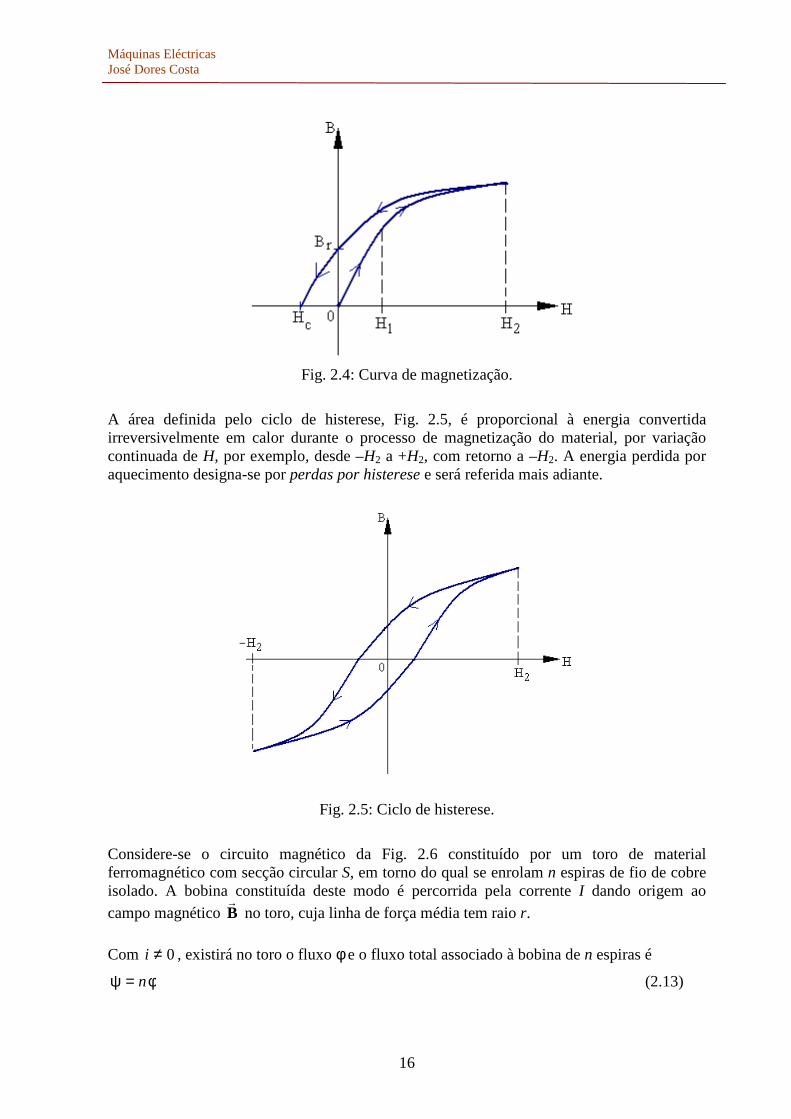
Fig. 2.4: Curva de magnetização.
A área definida pelo ciclo de histerese, Fig. 2.5, é proporcional à energia convertida irreversivelmente em calor durante o processo de magnetização do material, por variação continuada de H, por exemplo, desde –H2 a +H2, com retorno a –H2. A energia perdida por aquecimento designa-se por perdas por histerese e será referida mais adiante.
Fig. 2.5: Ciclo de histerese.
Considere-se o circuito magnético da Fig. 2.6 constituído por um toro de material ferromagnético com secção circular S, em torno do qual se enrolam n espiras de fio de cobre isolado. A bobina constituída deste modo é percorrida pela corrente I dando origem ao campo magnético B
r no toro, cuja linha de força média tem raio r.
Com 0≠i , existirá no toro o fluxo φ e o fluxo total associado à bobina de n espiras é
φ=ψ n (2.13)

Máquinas Eléctricas José Dores Costa
17
Se a resistência das n espiras do fio de cobre for R, a equação que rege o circuito da Fig. (2.6) é
tRiE
d
dψ+= (2.14)
Fig. 2.6: Circuito magnético toroidal.
Como condições iniciais de (2.14), considera-se que no instante inicial quando o circuito é ligado, t=0, se tem 0)0( =i e 0)0( =ψ . O fluxo Ψ crescerá com o aumento da corrente, sendo o crescimento proporcional à corrente quando o meio é linear,
Multiplicando ambos os membros de (2.14) por tid , resulta
ψ+= ddd 2 itRitiE (2.15)
O primeiro membro de (2.15) representa a energia cedida pela fonte de fem E durante o
intervalo de tempo dt ; tRi d2 representa a energia dissipada na bobina por efeito de Joule no mesmo tempo; ψdi representa a energia utilizada para criar o campo magnético B. Com
ψdd iWm = , a energia total do campo magnético no toro quando Ψ varia de 0 a Ψmax é
∫ψ
ψ=max
0
diWm (2.16)
Considerando que o campo no toro é constante, aplicando (2.22a) ao circuito da Fig. 2.6, obtém-se
SBS
S
==φ ∫→→d.B (2.17)
Se não existir saturação, (2.13) traduz uma relação linear, µ é constante e HB µ= ; o fluxo total associado à bobina é
SBnn =φ=ψ (2.18)
Recorde-se a lei de Ampére, ou lei da corrente total:

Máquinas Eléctricas José Dores Costa
18
InlHl∫ =
→→d. (2.19)
Para o toro da Fig. 2.6, calculando a circulação do campo H ao longo da linha de força média de raio r, de (2.19) resulta:
InlH = (2.20)
com l= 2πr.
Substituindo (2.18) e (2.20) em (2.16), obtém-se
∫∫∫ ===maxmaxmax
000
dddBBB
m BHVBVHBnSn
lHW (2.21)
em que V=lS é o volume do toro.
O último integral da direita de (2.21) representa a energia armazenada pelo campo magnético por unidade de volume do toro (é a densidade de energia por unidade de volume). A energia total associada ao campo magnético Bmax é então proporcional à área sombreada da Fig. 2.7(a).
Fig. 2.7: Densidade de energia magnética;
(a) com o campo Bmax; (b) perdas por histerese.
Em meios lineares, ou se não existir saturação, é HB µ= , e de (2.21) resulta que a energia associada ao campo magnético Bmax é dada por
2d maxmax
0
max BHVBHVW
B
m == ∫ (2.22)
A área sobreada da Fig. 2.7(b) representa a energia perdida por unidade de volume ao magnetizar o material de H1 até Hmax e voltar a H=0. Esta é ajustificação porque a área
Máquinas Eléctricas José Dores Costa
19
limitada pelo ciclo de histerese na Fig. 2.5 é proporcional às perdas por histerese durante um ciclo de magnetização.
Os materiais ferromagnéticos duros têm ciclos de histerese com áreas grandes e dão origem a maiores perdas por histerese, não sendo adequados para a construção de máquinas eléctricas, em geral.
Chama-se força magnetomotriz (fmm) à circulação do vector H ao longo dum caminho fechado, l, como se apresenta em (2.19):
InlH
l∫ ==
→→d.fmm (2.23)
Para o circuito da Fig. 2.6, desprezando a saturação, subtituindo (2.17) em (2.20) obtém-se
InS
l =µ
φ (2.24)
A fracção de (2.24) é a relutancia magnética do toro (Rm). A equação (2.24) traduz a lei de Ampére escrita em função do fluxo e é frequentemente designada por lei de Hopkinson.
InRm =φ , com S
lRm µ
= (2.25)
A relutância magnética depende da geometria e da constituição do material e, no caso geral, depende do fluxo do campo magnético. A relutância magnética traduz a maior ou menor facilidade com que um dado material pode ser atravessado por linhas de força do campo magnético. Frequentemente, os circuitos magnéticos são caracterizados pelo inverso da relutância magnética a que se chama permeância.
Multiplicando ambos os membros de (2.25) pelo número de espiras n, e rearranjando, obtém-se:
IR
nn
m
2=φ=ψ (2.26)
De acordo com (2.26), em meios lineares, o fluxo total associado à bobina é proporcional à intensidade da corrente eléctrica; a constante de proporcionalidade chama-se coeficiente de indução da bobina, L:
mR
nL
2= (2.27)
IL=ψ (2.28)
No caso geral, a relação Ψ(i) não é linear, e L depende da corrente. A relação Ψ(i) é ainda dada pela curva da Fig. 2.4 introduzindo as adequadas mudanças nas escalas dos eixos. Por
exemplo, para o toro da Fig. 2.6 seria BSn=ψ e Hn
lI = .
Em meios lineares, L é constante e substituindo (2.28) em (2.16), resulta que a energia magnética criada por uma bobina percorrida pela corrente eléctrica com intensidade I é dada por

Máquinas Eléctricas José Dores Costa
20
22
1ILWm = (2.29)
Tendo em conta (2.7) a fem induzida pela variação do fluxo do campo magnético numa bobina de n espiras é
ttn
d
d
d
d ψ−=φ−=ε (2.30)
Substituindo (2.28) em (2.30), obtém-se:
t
iL
d
d−=ε (2.31)
De acordo com (2.31), a fem induzida é proporcional à taxa de variação da corrente no tempo, e será nula se a corrente for constante. Substituindo (2.28) em (2.15), resulta:
iiLtRitiE ddd 2 += (2.32)
A potência posta en jogo pelo gerador da Fig. 2.6 é então
t
iiLRiiEpd
d2 +== (2.33)
O segundo membro de (2.33) é a soma da potência de perdas na bobina por efeito de Joule com a potência associada à criação do campo magnético no toro. Quando i é constante, a potência do gerador equilibra apenas as perdas por efeito de Joule no condutor da bobina, sendo a energia magnética constante.
Para reforçar o campo magnético, as bobinas são enroladas sobre nucleos de baixa relutância magnética. Os materiais usualmente utilizados são também condutores e estão no seio de campos magnéticos variáveis. Por esse facto, são induzidas correntes parasitas (eddy currents), designadas por correntes de Foucault, que têm três efeitos: (1) aquecem o material por efeito de Joule; (2) dão origem a campos magnéticos que se opõem ao campo exterior enfraquecendo-o; (3) dão origem a forças electromagnéticas. As correntes de Foucault provocam perdas que se procuram reduzir com a utilização de núcleos com resistência eléctrica elevada.
A soma das perdas por hiterese e às devidas às correntes de Foucault constitui aquilo que se designa por perdas no ferro e estão presentes em todas as máquinas eléctricas.
2.2 Acoplamento magnético
Os circuitos eléctricos têm acoplamento magnético quando partilham o mesmo campo magnético. Na Fig. 2.8 representam-se dois condutores (1 e 2) percorridos pelas correntes i1 e i2, respectivamente. Considera-se que os condutores estão perto um do outro, de tal forma que as correntes criam em torno do seu condutor um campo magnético cujo fluxo, parcialmente, atravessa também o outro condutor.
Máquinas Eléctricas José Dores Costa
21
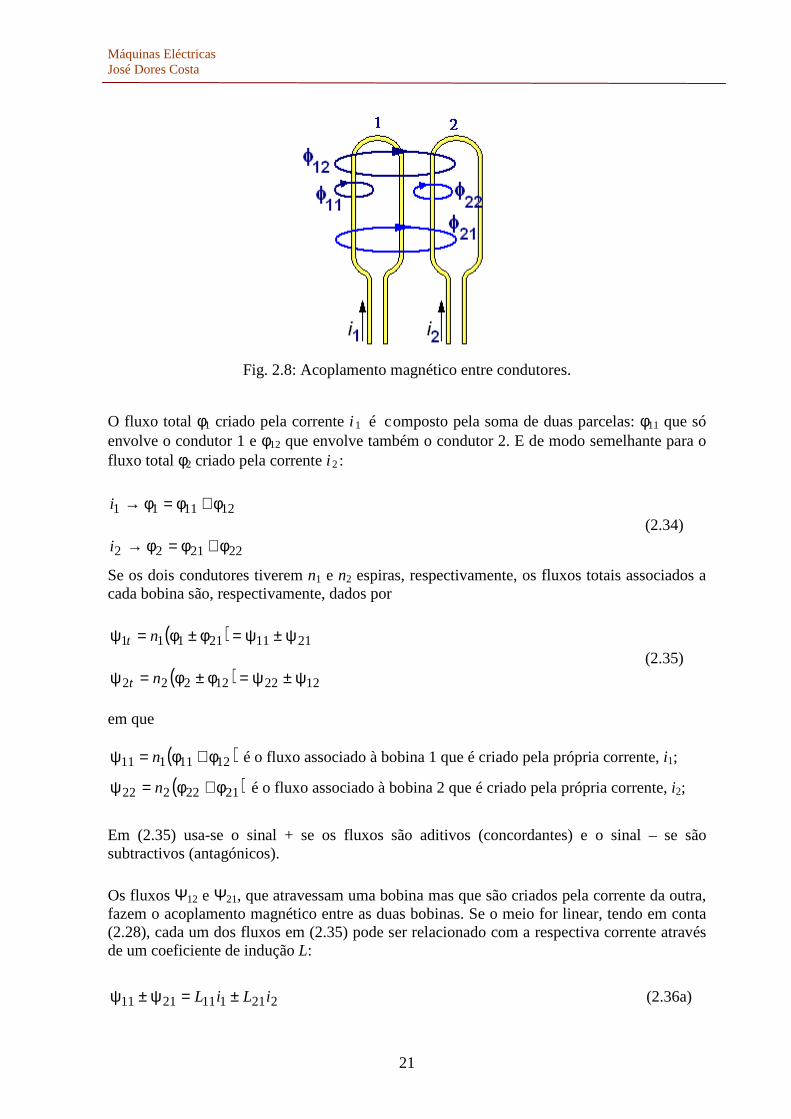
Fig. 2.8: Acoplamento magnético entre condutores.
O fluxo total φ1 criado pela corrente i 1 é composto pela soma de duas parcelas: φ11 que só envolve o condutor 1 e φ12 que envolve também o condutor 2. E de modo semelhante para o fluxo total φ2 criado pela corrente i 2:
121111 φ+φ=φ→i (2.34)
222122 φ+φ=φ→i
Se os dois condutores tiverem n1 e n2 espiras, respectivamente, os fluxos totais associados a cada bobina são, respectivamente, dados por
( ) 211121111 ψ±ψ=φ±φ=ψ nt
(2.35) ( ) 122212222 ψ±ψ=φ±φ=ψ nt
em que
( )1211111 φ+φ=ψ n é o fluxo associado à bobina 1 que é criado pela própria corrente, i1;
( )2122222 φ+φ=ψ n é o fluxo associado à bobina 2 que é criado pela própria corrente, i2;
Em (2.35) usa-se o sinal + se os fluxos são aditivos (concordantes) e o sinal – se são subtractivos (antagónicos).
Os fluxos Ψ12 e Ψ21, que atravessam uma bobina mas que são criados pela corrente da outra, fazem o acoplamento magnético entre as duas bobinas. Se o meio for linear, tendo em conta (2.28), cada um dos fluxos em (2.35) pode ser relacionado com a respectiva corrente através de um coeficiente de indução L:
2211112111 iLiL ±=ψ±ψ (2.36a)

Máquinas Eléctricas José Dores Costa
22
1122221222 iLiL ±=ψ±ψ (2.36b)
Pode-se demonstrar que L21=L12 e, porque relacionam o fluxo que atravessa uma bobina com a corrente na outra bobina, designam-se por coeficientes de indução mútua, sendo frequentemente representados por M (M= L21=L12). Os coeficientes L11 e L22 são designados por coeficientes de indução própria ou de auto-indução das bobinas.
Tendo em conta (2.30), a fem total induzida em cada bobina é dada por
t
iM
t
iL
te t
t d
d
d
d
d
d 2111
11 m−=
ψ−=
(2.37)
t
iM
t
iL
te t
t d
d
d
d
d
d 1222
22 m−=
ψ−=
Tendo em conta (2.29), num meio linear, a energia dWj associada ao fluxo de cada bobina devido à própria corrente é
21111 2
1ILW = (2.38a)
22222 2
1ILW = (2.38b)
A energia associada ao fluxo de acoplamento magnético é
21
0
21
0
1212
21
dd IIM
I
iMI
I
iMIW === ∫∫ (2.39)
A energia magnética total do circuito com acoplamento magnético será a soma das duas equações (2.38) com (2.39):
212
2222
111 2
1
2
1IIMILILWmt ++= (2.40)
O acoplamento magnético entre circuitos pode não ser desejável sendo apenas consequência da proximidade a que se encontram. Quando o acoplamento magnético é expressamente desejado para tornar possível a uma transferência de energia entre as duas bobinas, os fluxos φ11 e φ22 da Fig. 2.8 devem ser reduzidos porque não interligam magneticamente as bobinas, sendo então, do ponto de vista energético, considerados como perdas. Para melhorar o acoplamento magnético, normalmente enrolam-se as duas bobinas em torno de um núcleo de baixa relutância magnética. Esta situação é representada na Fig. 2.9, na qual o fluxo no toro, φm, realiza o acoplamento magnético das bobinas.

Máquinas Eléctricas José Dores Costa
23
Fig. 2.9: Bobinas com acoplamento magnético.
As bobinas de n1 e n2 espiras são percorridas pelas correntes i1 e i2, respectivamente. O fluxo total associado a cada bobina pode ser decomposto na soma de duas parcelas: φm que é o fluxo de magnetização no toro resultante daqueles criados pelas correntes das bobinas; e os fluxos de dispersão φd1 e φd2. Os fluxos de dispersão φd1 e φd2 fecham-se pelo no ar, não transferem energia entre as duas bobinas, e correspondem aos fluxos φ11 e φ21 da Fig.2.8 que envolvem apenas os respectivos condutores.
Seja Rm a relutância magnética do toro; os fluxos associados a cada bobina são, respectivamente,
( ) 11111 mdmdt n ψ+ψ=φ+φ=ψ (2.41a)
( ) 22222 mdmdt n ψ+ψ=φ+φ=ψ (2.41b)
com
mm R
inin 2211 ±=φ (2.41c)
mm R
innin 22112
11
±=ψ (2.41d)
mm R
innin 12122
22
±=ψ (2.41e)
Tendo em conta (2.28) e admitindo que não existe saturação, a partir de (2.41) podem ser definidos os seguintes coeficientes de indução:
- de magnetização da bobina 1, m
m R
nL
21
1 = (2.42a)
- de magnetização da bobina 2, m
m R
nL
22
2 = (2.42b)

Máquinas Eléctricas José Dores Costa
24
- de indução mútua, mR
nnMLL 21
2112 ±=== (2.43)
Numa forma semelhante a (2.42), podem ser definidos os seguintes coeficientes de auto-indução de dispersão:
- da bobina 1, 0
21
1m
d R
nL = (2.44a)
- da bobina da bobina 2, 0
22
2m
d R
nL = (2.44b)
sendo Rm0 uma relutância magnética equivalente às linhas de força no ar.
Com os coeficientes de indução definidos através das equações (2.42) a (2.44), as equações (2.41) podem ser escritas da seguinte forma:
221
1
21
0
21
1 iR
nni
R
n
R
n
mmmt ±
+=ψ (2.45a)
2
22
0
22
121
2 iR
n
R
ni
R
nn
mmmt
++±=ψ (2.45b)
De (2.45) resultam os coeficientes de auto-indução das bobina 1 e 2, respectivamente,
1111 md LLL += (2.46a)
2222 md LLL += (2.46b)
As equações (2.45) são equivalentes às (2.35) fazendo 111 φ=φd , 222 φ=φd e
1221 φ±φ=φm .
Tendo em conta (2.42), (2.43) e (2.46), as equações (2.45) podem ser escritas na seguinte forma matricial (considerando fluxos concordantes, para maior simplicidade de escrita):
⋅
=
ψψ
2
1
22
11
2
1
i
i
LM
ML
t
t (2.47)
O determinante de
22
11
LM
MLé
⋅−⋅⋅=−⋅=∆
2211
2
22112
2211 1LL
MLLMLL .

Máquinas Eléctricas José Dores Costa
25
Define-se factor de acoplamento magnético ao valor adimensional 2211
2
LL
Mk
⋅= . Se a
dispersão magnética for nula, de (2.45) resulta 2211 LLM = , e então k=1 e ∆=0; se os
circuitos estiverem magneticamente desacoplados, M=0 e k=0. Desta forma, k é uma medida da qualidade do acoplamento magnético entre dois circuitos e, consequentemente, deve ser
10 <≤ k .
Tendo em conta (2.37) derivando (2.47) obtém-se as fem induzidas em cada bobina:
⋅
−=
dt
iddt
id
LM
ML
e
e
t
t
2
1
22
11
2
1 (2.48)
Generalizando, se na Fig. 2.9 as bobinas tiverem resistências R1 e R2, respectivamente, as tensões aos seus terminais são dadas pelas equações seguintes:
⋅
+
⋅
=
dt
iddt
id
LM
ML
i
i
R
R
u
u
2
1
22
11
2
1
2
1
2
1
0
0 (2.49)
Se ∆≠0, (2.49) pode ser escrita na forma de um modelo de estado,
⋅
+
⋅
−=
−−
2
11
22
11
2
1
2
11
22
11
2
1
0
0
u
u
LM
ML
i
i
R
R
LM
ML
dt
iddt
id
(2.50)
A equação (2.50) é o modelo matemático completo do circuito da Fig. 2.9, e a sua solução,
[ ]t21 )()( titi , pode ser obtida por integração, conhecidas que sejam as tensões u1(t) e u2(t) e
as condições iniciais [ ]t21 )0()0( ii .
Neste curso, estaremos particularmente interessados em tensões industriais do tipo alternado sinusoidal cujo valor instantâneo pode ser representado pela função )cos()( α+ω= tUtu ; U
é a amplitude da tensão, ω é a pulsação (ω=2π f ) e α é a fase na origem, isto é, a fase para t=0.
Para grandezas alternadas sinusoidais, as soluções forçadas podem ser calculadas no domínio da frequência. Nesta mudança de domínios, os valores instantâneos são substituídos por
amplitudes complexas e o operador derivada é substituído por jω: ω→ jtd
d. Por exemplo,
considere-se a tensão )cos()( α+ω= tUtu . Para os domínios do tempo e da frequência são válidas as seguintes correspondências:

Máquinas Eléctricas José Dores Costa
26
Domínio do tempo Domínio da frequência
)cos()( α+ω= tUtu α= jeUUr
t
tu
d
)(d U
rωj (2.51)
)2
cos(d
)(d π+α+ωω= tUt
tu )
2j(
j
π+αω=ω eUU
r
Aplicando (2.51) a (2.49), resulta:
⋅
ω+
⋅
=
2
1
22
11
2
1
2
1
2
1 j0
0
I
I
I
I
U
Ur
r
r
r
r
r
LM
ML
R
R (2.52)
E simplificando, obtém-se:
⋅
ω+ωωω+
=
2
1
222
111
2
1jj
jj
I
I
U
Ur
r
r
r
LRM
MLR (2.53)
Conhecidas as correntes sinusoidais nas bobina da Fig. 2.9, a equação (2.53) permite o cálculo das amplitudes complexas das tensões aos terminais das bobinas. Por outro lado, sendo conhecidas as amplitudes complexas das tensões, se a matriz das impedâncias for invertível, as amplitudes complexas das correntes são dadas por:
⋅
ω+ωωω+
=
−
2
11
222
111
2
1jj
jj
U
U
I
Ir
r
r
r
LRM
MLR (2.54)
De (2.54) resulta:
( )( )( ) 22
222111
212221
jj
jj
MLRLR
MLR
ω+ω+ω+
ω−ω+= UUI
rrr
(2.55a)
( )( )( ) 22
222111
121112
jj
jj
MLRLR
MLR
ω+ω+ω+
ω−ω+= UUI
rrr
(2.55b)
As unidades das grandezas magnéticas que temos estado a tratar, no sistema internacional de medidas (SI), estão resumidas na tabela 2.1.

Máquinas Eléctricas José Dores Costa
27
Tabela 2.1: Unidades no SI
Grandeza Unidade Símbolo
B tesla T
H ampere/m Am-1
Ψ, Φ weber Wb
L henry H
Rm 1/henry H-1
fmm ampere-espira Ae
2.3 Problemas
2.1 A Fig. 2.P1 representa um circuito magnético constituído por um toro de material
ferromagnético uniforme com permeabilidade magnética relativa µFe em torno do qual se
enrolaram n espiras de um fio condutor isolado; o toro tem o raio médio R, a secção recta
uniforme S e um entreferro de espessura δ. Não existindo saturação, calcule:
a) a relutância magnética do ferro e do ar; b) a relutância magnética total do núcleo; c) o fluxo do campo magnético no toro; d) os campos de indução e de excitação magnéticos no
ferro e no ar; e) o coeficiente de auto-indução da bobina; f) a energia magnética armazenada no ferro e no ar;
g) a fmm necessária para duplicar o campo magnético
de indução no ar.
µO= 4π.10 -7 Hm-1
R=2 cm; δ=1mm; S=0,79 cm2;
I=1 A; n=100; µFe=7000.
Fig. 2.P1
2.2 Considere o circuito da Fig. 2.P1 com o entreferro δ=0,1mm. Calcule os campos de
indução e de excitação magnéticos, e a energia magnética, no ferro e no ar.
2.3 A Fig. 2.P2 representa um circuito magnético constituído por um toro de material com
permeabilidade magnética relativa µr, com o raio médio R e a secção recta uniforme S, em
torno do qual se enrolaram duas bobinas de fios condutores isolados com n1 e n2 espiras,
respectivamente. Considerando que não existe saturação, com a bobina n2 em vazio, obtenha
a tensão u2(t), nos seguintes casos:

Máquinas Eléctricas José Dores Costa
28
a) i(t)= 1 A; b) i(t)= 1+2t A; c) )cos(2)( tti ω⋅= A.
µO= 4π.10 -7 Hm-1
R=2 cm; S=0,79 cm2; n1=100; n2=50; µr=1000;
Fig. 2.P2
2.4 Para o circuito da Fig. 2.P2, obtenha os coeficientes de indução própria e mútua das duas bobinas. 2.5 Na Fig. 2.P3, R1 representa a resistência da bobina n1 enrolada em torno do toro da Fig. 2.P3. Obtenha: (a) a corrente i(t) quando se liga uma tensão contínua U=6V à bobina n1, com i(0)=0; (b) a tensão u2(t), quando se liga tensão contínua da (a).
R1= 3 Ω.
Fig. 2.P3
2.6 A Fig. 2.P4 apresenta o corte num rotor com comprimento l e raio R, que contém uma espira percorrida pela corrente contínua I, e que gira no seio dum campo magnético uniforme B. Calcule: (a) o binário que actua o rotor em função de θ; (b) as posições do rotor para as quais o binário é nulo e aquelas em que é máximo. (c) Calcule a fem induzida na espira em vazio (I=0) quando o rotor roda com a velocidade
constante N=60 rpm.
(d) Repita a (c) considerando uma bobina de 20 espiras rodando à mesma velocidade.
l=10 cm
R=5 cm
I=5 A
B=0,9T
Fig. 2.P4
Máquinas Eléctricas José Dores Costa
29
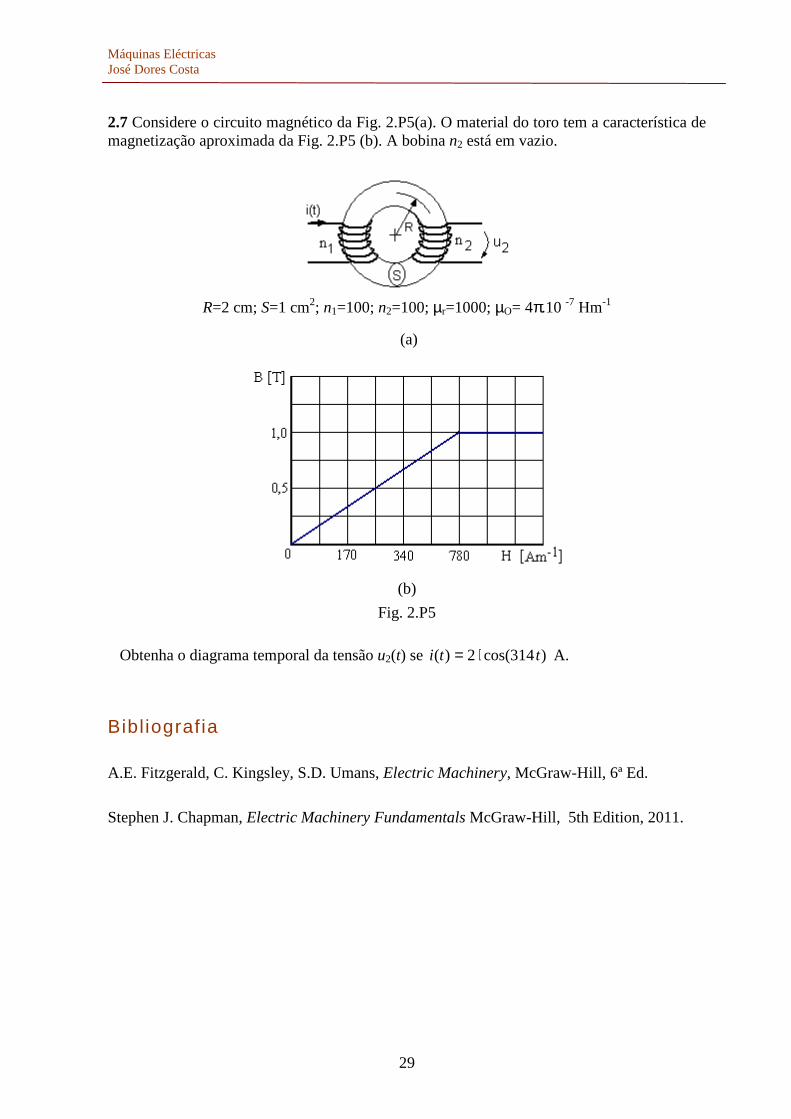
2.7 Considere o circuito magnético da Fig. 2.P5(a). O material do toro tem a característica de magnetização aproximada da Fig. 2.P5 (b). A bobina n2 está em vazio.
R=2 cm; S=1 cm2; n1=100; n2=100; µr=1000; µO= 4π.10 -7 Hm-1
(a)
(b)
Fig. 2.P5
Obtenha o diagrama temporal da tensão u2(t) se )314cos(2)( tti ⋅= A.
Bibliografia
A.E. Fitzgerald, C. Kingsley, S.D. Umans, Electric Machinery, McGraw-Hill, 6ª Ed.
Stephen J. Chapman, Electric Machinery Fundamentals McGraw-Hill, 5th Edition, 2011.

Máquinas Eléctricas José Dores Costa
30
CAPÍTULO 3.
TRANSFORMADOR
3.1 Introdução Chama-se transformador a um aparelho electromagnético estático, isto é, sem partes móveis, que utiliza o acoplamento magnético entre duas ou mais bobinas, de tal forma que é possível modificar as amplitudes das tensões eléctricas, ou das correntes, variáveis no tempo. O transformador é constituído por um núcleo, usualmente de material ferromagnético de baixa relutância e elevada resistência, em torno do qual se enrolam diversas bobinas de fio condutor, à semelhança do circuito da Fig. 2.9. O funcionamento do transformador envolve princípios que são comuns com o funcionamento das máquinas eléctricas e, por isso, neste capítulo desenvolvem-se conceitos já expostos no capítulo 2, fazendo a ponte para os capítulos seguintes sobre máquinas eléctricas rotativas.
A Fig. 3.1 representa a constituição dum transformador com dois enrolamentos. Uma das bobinas, n1, é alimentada por uma tensão alternada sinusoidal, dando origem a um fluxo magnético, também alternado sinusoidal, cuja amplitude depende da amplitude da tensão aplicada e da sua frequência, e do número de espiras n1. Este fluxo faz o acoplamento magnético com a outra bobina, n2, induzindo nesta uma tensão também alternada sinusoidal cuja amplitude depende do seu número de espiras n2 e da amplitude do fluxo.
Fig. 3.1: Constituição de um transformador monofásico.
Os transformadores podem-se ter várias bobinas com diferentes números de espiras e com condutores de secções diferentes, sendo usados em aplicações de grande ou de pequena potência. Por convenção, num transformador com dois enrolamentos, a bobina ligada à fonte de tensão u(t), com n1 espiras, designa-se por primário e a bobina com n2 espiras, que alimentará a carga, designa-se por secundário do transformador.

Máquinas Eléctricas José Dores Costa
31
Os transformadores obedecem à lei geral da indução electromagnética, podem ser considerados como máquinas eléctricas sem partes móveis, A energia eléctrica recebida da fonte de entrada através do enrolamento primário é transformada em de energia magnética no núcleo, e esta é transferida para a carga através do enrolamento do secundário. Os circuitos do primário e do secundário estão desacoplados galvânicamente e a sua ligação é feita através do fluxo do campo magnético no núcleo.
No caso dos transformadores industriais de 50 Hz, o núcleo é constituído por lâminas metálicas finas de ferro silicioso com formas padronizadas, justapostas e isoladas umas das outras para se reduzir as correntes de Foucault, Fig. 3.2(a). Em circuitos de baixa potência, quando as tensões e as correntes têm frequências elevadas (superiores a 1 kHz), o núcleo do transformador é usualmente maciço, utilizando-se ferrites - são misturas de óxidos ferromanéticos com Ni, Zn, Mn, Fe de elevada resistividade e prensados - com diversas formas: toros, pot cores, representado na Fig. 3.2(b), e barras rectangulares, por exemplo.
(a) (b) (c)
Fig. 3.2: Transformadores de pequena potência;
(a) monofásico de 50 Hz; (b) em pot core para 100 kHz; (c) pot core.
No projecto dos transformadores tem-se em conta, nomeadamente, o tipo de utilização, a potência em jogo, a forma de onda das tensões, e das correntes, e a sua frequência. São também aspectos importantes a considerar a ventilação e o isolamento eléctrico entre as espiras das bobinas.
Para a mesma potência transportada, quanto mais alta é a tensão, menor é a intensidade da corrente e portanto mais pequena será a secção dos condutores da linha de transporte de energia eléctrica. Este é um dos motivos porque se eleva a tensão a centenas de kV para se efectuar o seu transporte através da rede eléctrica de um país, voltando depois a reduzi-la junto aos utilizadores, Fig. 3.3. A Fig. 3.4 apresenta um transformador de alta tensão usado em subestações. Noutras utilizações, recorre-se a transformadores para reduzir a tensão industrial de baixa tensão para níveis adequados à alimentação de equipamentos eléctricos e electrónicos.
Neste curso, trataremos de transformadores à frequência industrial de 50 Hz. Todavia, qualquer que seja a sua aplicação, dimensões e tipo de construção, o funcionamento do transformador baseia-se no princípio acima descrito e na lei geral da indução (2.30).
Os transformadores industriais podem ser monofásicos ou trifásicos e com vários enrolamentos por fase. Para maior simplicidade, e porque se pretende fazer a ponte com as

Máquinas Eléctricas José Dores Costa
32
máquinas eléctricas, os conceitos serão expostos considerando o transformador monofásico com dois enrolamentos, cuja constituição é apresentada na Fig. 3.1.
Fig. 3.3: Produção e distribuição de energia eléctrica.
Fig. 3.4: Transformador de alta tensão.

Máquinas Eléctricas José Dores Costa
33
3.2 Transformador ideal Num transformador ideal, sem perdas, as tensões e as correntes têm diferentes amplitudes, têm a mesma frequência, e a soma da energia eléctrica fornecida por todos os enrolamentos secundários é igual à energia recebida pelo primário.
A corrente alternada sinusoidal que percorre o enrolamento do primário faz aparecer no núcleo de ferro um fluxo magnético alternado sinusoidal φ, Fig. 3.1. Com dois enrolamentos, este fluxo variável é abraçado pelos enrolamentos do primário e do secundário e, segundo a lei geral de indução, induz em cada um deles uma f.e.m dada por:
11 dt
dne
φ−= (3.1)
22 dt
dne
φ−= (3.2)
em que, respectivamente, n1 e n
2 são o número de espiras dos enrolamentos primário e
secundário, e e1 e e
2 são as f.e.m induzidas nesses enrolamentos, respectivamente.
Considere-se que, sendo a corrente no primário sinusoidal, o fluxo φ(t) também é sinusoidal e que é representado por:
tt ωΦφ cos = )( (3.3)
Com o fluxo (3.3), a fem induzida em cada espira será:
π−ωΦω=ωΦω=φ−=2
cos sen ttdt
de (3.4)
Da equação (3.4) conclui-se que a f.e.m induzida em cada enrolamento está desfasada de 90º em atraso em relação ao fluxo φ.
Os valores eficazes das fem totais (3.4) induzidas em cada um dos enrolamentos são:
Φ=Φω= 11 ef1 4,44 2
1nfnE (3.5)
Φ=Φω= 22 ef 2 4,44 2
1nfnE (3.6)
Ao quociente entre os valores eficazes de e1 e de e
2 chama-se razão de transformação do
transformador:
2
1
2
1
n
n
E
En
ef
ef == (3.7)
Usando (3.7), os transformadores são redutores quando n>1 (n1>n2) e são elevadores
quando n<1 (n1<n2).
A potência activa primária, ou seja, o valor médio da potência instantânea absorvida pelo primário, é:

Máquinas Eléctricas José Dores Costa
34
1111 cos ϕ= IUP (3.8)
Existindo uma corrente no secundário, i2, a potência activa aos terminais do secundário é:
2222 cos ϕ= IUP (3.9)
Num transformador ideal não existem perdas, e as potências postas em jogo no primário e no secundário são iguais: 21 PP = . Para o transformador ideal, sem perdas, é ϕ ϕ1 2≈ e os valores eficazes das tensões U1 e U2 são iguais aos das fem respectivas; a igualdade das
potências implica que 221121 IUIUPP =⇒= , de que resulta.
2
1
1
2
2
1
n
n
I
I
U
U== (3.10)
Ou seja,
nU
U=
2
1 (3.11)
nI
I 1
2
1 = (3.12)
Num transformador ideal toda a energia fornecida pelo primário é transferida para a carga ligada ao secundário. A equação (3.10) é equivalente a considerar que a fmm total no toro é nula, isto é, a fmm do primário é totalmente equilibrada pela do secundário:
02211 =− InIn (3.13)
O acoplamento entre os dois enrolamentos do transformador ideal é realizado pela indução mútua entre eles, M e o coeficiente de acoplamento magnético é k=1. Esquematicamente, o transformador ideal é representado pelo circuito da Fig. 3.5, que traduz, apenas, a relação entre as tensões e correntes (3.10). Na figura, L1 e L2 são os coeficientes de magnetização totais das bobinas 1 e 2, respectivamente, que no transformador ideal tendem para infinito.
Fig. 3.5: Transformador ideal.
O transformador ideal modifica apenas as amplitudes das tensões e correntes de acordo com as equações (3.10).
Máquinas Eléctricas José Dores Costa
35
3.3 Transformador com perdas
Um transformador real tem perdas (i) perdas no ferro devido às correntes de Foucault e à histerese, existem, embora sejam usualmente pequenas, até porque se procura utilizar para o núcleo um material com pequenas perdas; (ii) perdas no cobre, que designam as perdas devidas ao aquecimento das bobinas por efeito de Joule, que dependem dos condutores e das intensidades das correntes no primário e no secundário, e que são variáveis, dependendo essencialmente da carga do transformador; (iii) perdas devidas à dispersão do fluxo magnético, porque o factor de acoplamento magnético k<1.
O rendimento do transformador varia com a carga, dependendo fortemente das perdas no ferro e no cobre.
Sejam R1 e R
2 respectivamente as resistências dos enrolamentos do primário e do secundário
do transformador. A equação para o enrolamento do primário é:
1111 eiRu −= (3.14)
com
dt
d
dt
dne 111
Ψ−=φ−= (3.15)
Para o secundário em carga, a equação das malhas conduz a:
2222 uiRe += (3.16)
com
dt
d
dt
dne 2
22Ψ
−=φ−= (3.17)
De acordo com (2.46) e (2.47), admitindo que não existe saturação (na zona linear a permeabilidade magnética do ferro é constante), os fluxos ligados Ψ
1 e Ψ
2 são dados por:
21111 iMiL +=Ψ (3.18)
12222 iMiL +=Ψ (3.19)
em que L11
e L22 são, respectivamente, os coeficientes de autoindução do primário e do
secundário e M é o coeficiente de indução mútua entre os dois enrolamentos.
Para o transformador real, os coeficientes de autoindução podem não ser constantes devido ao fenómeno da saturação magnética. Todavia, para facilidade de exposição, ao longo deste texto consideram-se meios lineares e, quando nada for dito em contrário, os coeficientes de indução são então constantes.
O circuito da Fig. 3.5 é usualmente modificado para incluir as perdas no cobre e no ferro e a dispersão magnética. Para isso, começamos por considerar que o primário é alimentado por uma tensão alternada, u1, com frequência f constante e que o secundário está aberto (em vazio, i2 = 0). Porque i2 = 0, de (3.12) resulta que no transformador ideal será ip = 0.
O primário é percorrido por uma corrente i0 que cria um fluxo 0φ com duas componentes:

Máquinas Eléctricas José Dores Costa
36
- φP, o fluxo principal, cujas linhas de força se fecham pelo núcleo (ou pelo ferro), ligando os dois enrolamentos;
- φ1d, o fluxo de dispersão, que se fecha pelo ar em torno da bobina do primário.
Em vazio, a energia pedida à fonte é basicamente usada para criar um fluxo φP, que originará no secundário a fem e2, e um fluxo de perdas, φd, que dá origem a uma fem suplementar,
t
il
te d
dd d
d
d
d 01
11 −=
ψ−= (3.20)
em que, tendo em conta (2.44), dl1 é o coeficiente de indução de dispersão no
primário: 011 iln ddd =φ=ϕ .
O mesmo raciocínio poderia ser feito para a bobina do secundário. Para incluir (3.20), (3.14) e (3.16) o circuito da Fig. (3.5) é transformado no da figura seguinte:
dd lX 11 ω= ; dd lX 22 ω= ; MXm ω= ; fπ=ω 2
Fig. 3.6: Modelo eléctrico do transformador.
Na Fig. 3.6, RFe representa as perdas no ferro, tendo um valor tal que a potência nela dissipada é igual à das perdas no núcleo do transformador; consideraram-se tensões e correntes sinusoidais, motivo pelo qual se representam já as reactâncias das bobinas.
Com )cos()( 11 tUtu ω= , na malha do primário tem-se,
111111 IjIEUrr
dlR ω++−=→→
(3.21a)
sendo
M1 IjEr
Mω=−→
(3.21b)
Na malha do secundário, porque a corrente é nula, é .22 ue −=
As amplitudes complexas →→→→→
φ 12M1 U e ,E ,I , ,E P podem ser relacionadas pelo diagrama vectorial da figura (3.7). O diagrama foi desenhado do seguinte modo:

Máquinas Eléctricas José Dores Costa
37
1º) Desenha-se →φP , cujo vector tomamos como referencial do diagrama;
2º) Tendo em conta (2.51), 21 E e →→
E desenham-se em quadratura e atraso em relação a pφ
(considerou-se E1 >E2).
3º) A corrente em vazio, 0Ir
, tem duas componentes: MIr
é a componente reactiva que cria o
fluxo pφ e que está em fase com ele; FeIr
é a componente activa que está em quadratura e
avanço com pφ . Desta forma, 220 MFe III += . Esta corrente dá origem às perdas no ferro.
O factor de potência em vazio é ϕcos .
Fig. 3.7: Diagrama vectorial em vazio.
Note-se que pφr
está desfasado da corrente 0Ir
. FeIr
só em vazio é que tem um papel
importante, pois em carga 1II <<Fe . Caso não existissem perdas no ferro,φ p estaria em fase
com 0Ir
. As formas de onda das fem induzidas podem não ser sinusoidais, apesar de pφ o
ser, dependendo da saturação e da curva de magnetização do ferro. Em vazio, a corrente do primário, 0I é muito pequena e as perdas no cobre podem ser
desprezadas. Em vazio, a potencia activa, considerando valores eficazes, é dada por
FeI Ucos I U=P 1010 ≈ϕ . Em vazio, a potência activa consumida pelo transformador,
praticamente, equilibra apenas as perdas no ferro causadas pela histerese e pelas correntes de Foucault.

Máquinas Eléctricas José Dores Costa
38
Os transformadores, como outra qualquer máquina eléctrica, é caracterizado pela potência para que foi projectado. Essa potência é designada por potência nominal do transformador. Para uma tensão de entrada, no primário, com frequência e amplitude constantes, definem-se as correntes nominais do primário e do secundário e a tensão nominal do secundário.
Sejam, respectivamente, P1 e P2 as potências activas no primário e no secundário do transformador em carga. Num transformador real em carga, existem perdas no ferro e no cobre (por efeito de Joule nos enrolamentos), de tal forma que:
P1=P2+PCu+PFe (3.22a)
com
222
211 efefCu IRIRP += (3.22b)
O rendimento do transformador será então dado por,
1
Cu
1
Fe
1
2 1P
P
P
P
P
P−−==η (3.23)
Em vazio, porque a corrente no primário é muito reduzida e as perdas no cobre podem ser desprezadas. O rendimento varia com a carga porque a potência no cobre é função da corrente, de acordo com (3.22b); as perdas no ferro são aproximadamente constantes. Define-se o factor de carga, C, como sendo a razão entre o valor eficaz da corrente do secundário do transformador num dado instante e a sua corrente do secundário nominal:
NI
IC
2
2= (3.24)
Em carga, o secundário é percorrido pela corrente 2i . Tal como para o primário, de acordo
com a Fig. 3.6, também existirá um fluxo de dispersão 222 il dd =ϕ , sendo dl2 o coeficiente
de indução de dispersão do secundário. A corrente 2i cria um fluxo magnético que no caso mais geral da carga ser resistiva ou indutiva, opõe-se ao fluxo criado pela corrente no primário.
Com )cos()( 11 tUtu ω= , da malha do primário da Fig. 3.6 resulta:
1111M1 IjIIjUrrr
dlRM ω++ω=→
(3.25)
Considerando uma impedância de carga Zc ligada aos terminais do secundário, 22 IZUrr
c= ,
na malha do secundário resulta:
2c22222 IZIIrrrrr
+ω+=− dljRE (3.26)
com M1
21
1
22 Ij
rrrM
n
nE
n
nE ω== .
Desprezando as perdas no ferro, do equilíbrio das fmm resulta,
Máquinas Eléctricas José Dores Costa
39
Mn
nIII 2
1
21
rrr+−= (3.27)
As equações (3.25), (3.26) e (3.27) descrevem o funcionamento em regime estacionário do transformador em carga, e têm três correntes como incógnitas e envolvem a razão entre o número de espiras. É possível usar-se também (2.52), modificada para incluir a dispersão e a carga. Todavia, para facilitar a análise e os cálculos, apresenta-se no parágrafo seguinte um esquema equivalente do transformador reduzido ao número de espiras do primário ou do secundário.
3.4 Transformador reduzido
Em carga, o secundário é percorrido pela corrente 2i que cria um fluxo magnético que, no caso mais geral da carga ser resistiva ou indutiva, se opõe ao fluxo criado pela corrente no primário.
Tendo em conta as figuras 3.6, para o transformador em carga deve-se verificar,
01 iii p += (3.28)
em que i1 é a corrente de entrada, i0 é a corrente no ramo do ferro, e iP é a corrente no primário do transformador ideal que corresponde à corrente i2 de carga no secundário; tendo em conta (3.12), é
21
2 in
ni p −= (3.29)
A corrente iP de (3.29) é a corrente do secundário reduzida ao primário, isto é, convertida para o número de espiras do primário. Substituindo (3.29) em (3.28), resulta,
021
21 ii
n
ni +−= (3.30)
De acordo com (3.20), do lado do primário, a corrente do secundário corresponde a uma corrente fictícia, i’ 2, que com os sentidos da Fig. 3.6, é dada por (3.29):
21
22 II
rr
n
n−=′ (3.31)
Desta forma, para grandezas sinusoidais, (3.30) pode ser escrita como
021 IIIrrr
+′−= (3.32)
A equação (3.32) corresponde à lei dos nós aplicada do lado do primário. As impedâncias do lado do secundário também podem ser reduzidas ao primário. Para isso considere-se um transformador ideal em que são válidas as seguintes equações (os sub-índices p e s significam primário e secundário, respectivamente):
sp Vn
nV
rr
2
1= (3.33)
Máquinas Eléctricas José Dores Costa
40
sp In
nI
rr
1
2= (3.34)
Seja p
p
I
VZ
r
=1 a impedância do primário e s
s
I
VZ
r
=2 a impedância do secundário. Dividindo
(3.33) por (3.34), resulta,
s
s
p
p
I
V
n
n
I
Vr
r
r
r 2
2
1
= (3.35)
De (3.35) conclui-se que a razão entre as impedâncias é igual ao quadrado da razão entre o número de espiras:
2
2
2
11 Z
n
nZ
= (3.36)
A equação (3.36) significa que a impedância do secundário 2Z pode ser colocada no lado do primário desde que seja multiplicada por (n1/n2)
2. Com base em (3.36), consideram-se os valores fictícios
2
2
2
12 R
n
nR
=′ dd X
n
nX 2
2
2
12
=′ (3.37)
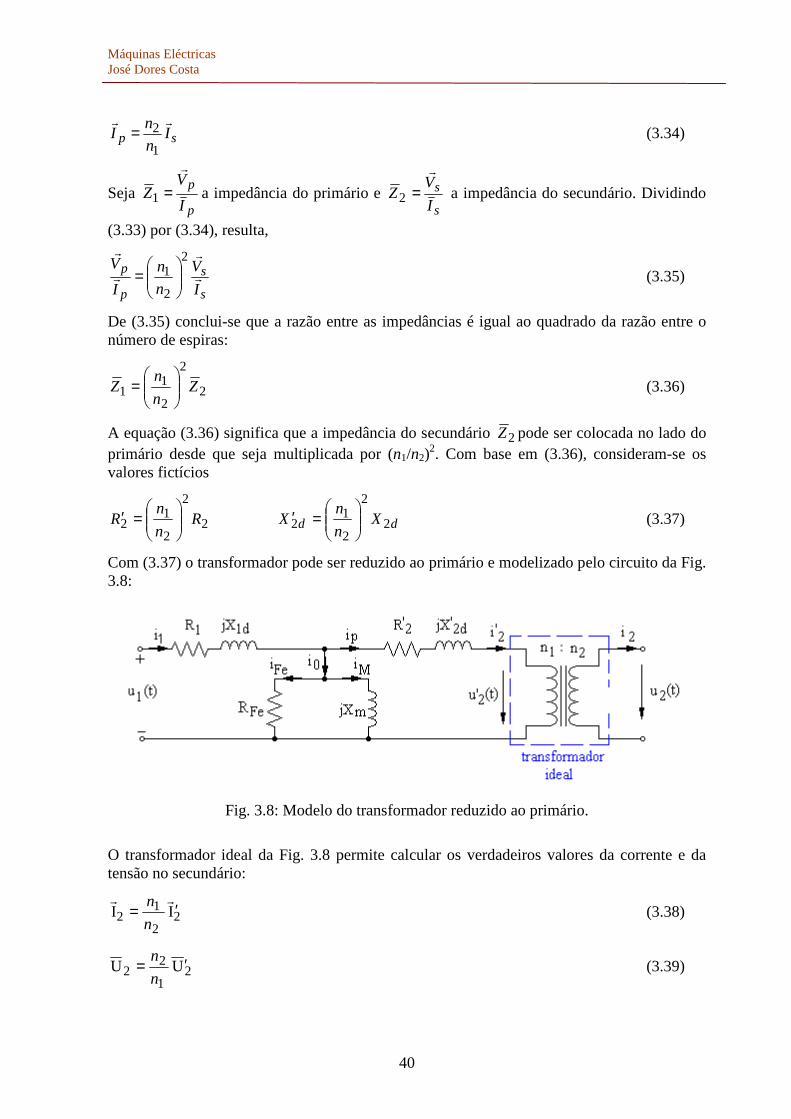
Com (3.37) o transformador pode ser reduzido ao primário e modelizado pelo circuito da Fig. 3.8:
Fig. 3.8: Modelo do transformador reduzido ao primário.
O transformador ideal da Fig. 3.8 permite calcular os verdadeiros valores da corrente e da tensão no secundário:
22
12 II ′=
rr
n
n (3.38)
21
22 UU ′=
n
n (3.39)
Máquinas Eléctricas José Dores Costa
41
A impedância da carga, cZ , pode ser também colocada no lado do primário desde que se use
o seu valor reduzido ao primário:
cc Zn
nZ
2
2
1
=′ (3.40)
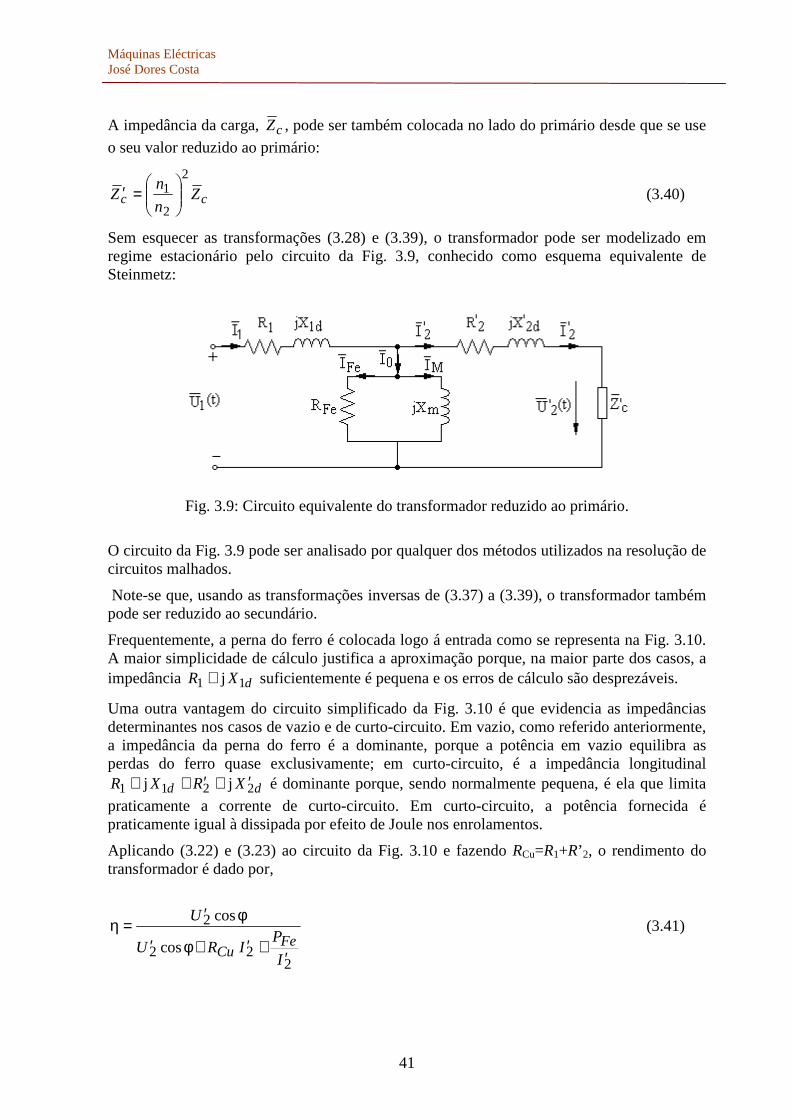
Sem esquecer as transformações (3.28) e (3.39), o transformador pode ser modelizado em regime estacionário pelo circuito da Fig. 3.9, conhecido como esquema equivalente de Steinmetz:
Fig. 3.9: Circuito equivalente do transformador reduzido ao primário.
O circuito da Fig. 3.9 pode ser analisado por qualquer dos métodos utilizados na resolução de circuitos malhados.
Note-se que, usando as transformações inversas de (3.37) a (3.39), o transformador também pode ser reduzido ao secundário.
Frequentemente, a perna do ferro é colocada logo á entrada como se representa na Fig. 3.10. A maior simplicidade de cálculo justifica a aproximação porque, na maior parte dos casos, a impedância dXR 11 j+ suficientemente é pequena e os erros de cálculo são desprezáveis.
Uma outra vantagem do circuito simplificado da Fig. 3.10 é que evidencia as impedâncias determinantes nos casos de vazio e de curto-circuito. Em vazio, como referido anteriormente, a impedância da perna do ferro é a dominante, porque a potência em vazio equilibra as perdas do ferro quase exclusivamente; em curto-circuito, é a impedância longitudinal
dd XRXR 2211 jj ′+′++ é dominante porque, sendo normalmente pequena, é ela que limita
praticamente a corrente de curto-circuito. Em curto-circuito, a potência fornecida é praticamente igual à dissipada por efeito de Joule nos enrolamentos.
Aplicando (3.22) e (3.23) ao circuito da Fig. 3.10 e fazendo RCu=R1+R’2, o rendimento do transformador é dado por,
222
2
cos
cos
I
PIRU
U
FeCu ′
+′+φ′
φ′=η (3.41)

Máquinas Eléctricas José Dores Costa
42
A equação (3.41) tem um máximo quando 0d
d
22
2=
′+′
′ I
PIR
IFe
Cu , o que conduz a
FeCu PIR =′ 22 . Assim, tal como foi dito anteriormente, o rendimento é máximo quando as
perdas no cobre são iguais à perdas no ferro, mantendo-se constante o factor de potência.
Fig. 3.10: Circuito equivalente simplificado reduzido ao primário.
(a)
(b)
Fig. 3.11: Circuito equivalente simplificado: (a) em vazio; (b) em curto-circuito.
Os parâmetros do circuito equivalente do transformador podem ser obtidos experimentalmente através dos ensaios em vazio e em curto-circuito.
Máquinas Eléctricas José Dores Costa
43
O ensaio de curto-circuito não pode ser realizado à tensão nominal porque isso implicava a destruição do transformador. Define-se como tensão de curto-circuito a tensão que aplicada ao primário que provoca, em curto-circuito, a corrente nominal no secundário (que está curto-circuitado). É esta a tensão que é usada neste ensaio.
3.5 Ensaios do transformador
Os parâmetros do circuito equivalente da Fig. 3.10 podem ser obtidos por via experimental. Para isso, realizam-se dois ensaios com o transformador: o ensaio em vazio e o ensaio em curto-circuito.
Com o ensaio em vazio pretende-se determinar: (i) o valor da resistência equivalente às perdas no ferro; (ii) a reactância de magnetização; (iii) a razão de transformação.
Em vazio, a corrente no primário é pequena, as perdas no cobre do primário são desprezáveis, e a potência em vazio equilibra praticamente as perdas do ferro. Estas perdas variam com a tensão de entrada, mas permanecem praticamente constantes quando a fem induzida na bobina é constante.
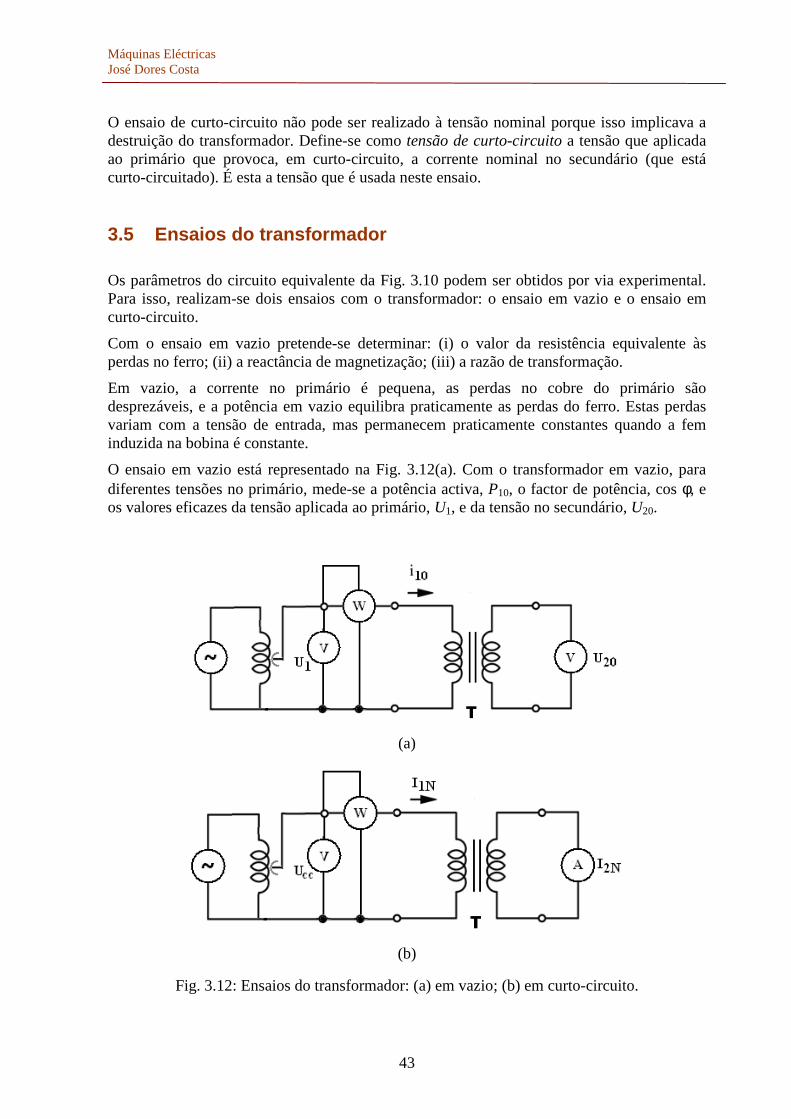
O ensaio em vazio está representado na Fig. 3.12(a). Com o transformador em vazio, para diferentes tensões no primário, mede-se a potência activa, P10, o factor de potência, cos φ, e os valores eficazes da tensão aplicada ao primário, U1, e da tensão no secundário, U20.
(a)
(b)
Fig. 3.12: Ensaios do transformador: (a) em vazio; (b) em curto-circuito.
Máquinas Eléctricas José Dores Costa
44
Para cada valor de U1, conhecida P10= PFe, a resistência equivalente às perdas no ferro é calculada por,
10
21
P
URFe = (3.42)
Conhecido o factor de potência, cos φ, calcula-se a potência reactiva em vazio, Q10= P10.tg φ, e a a reactância de magnetização, Xm, é calculada por
10
21
Q
UXm = (3.43)
Finalmente, a razão de transformação é
20
1
U
Un = (3.44)
Com base nestes valores, são traçadas as curvas )( 1UfRFe = , )( 1UgXm = e )( 1Uhn = .
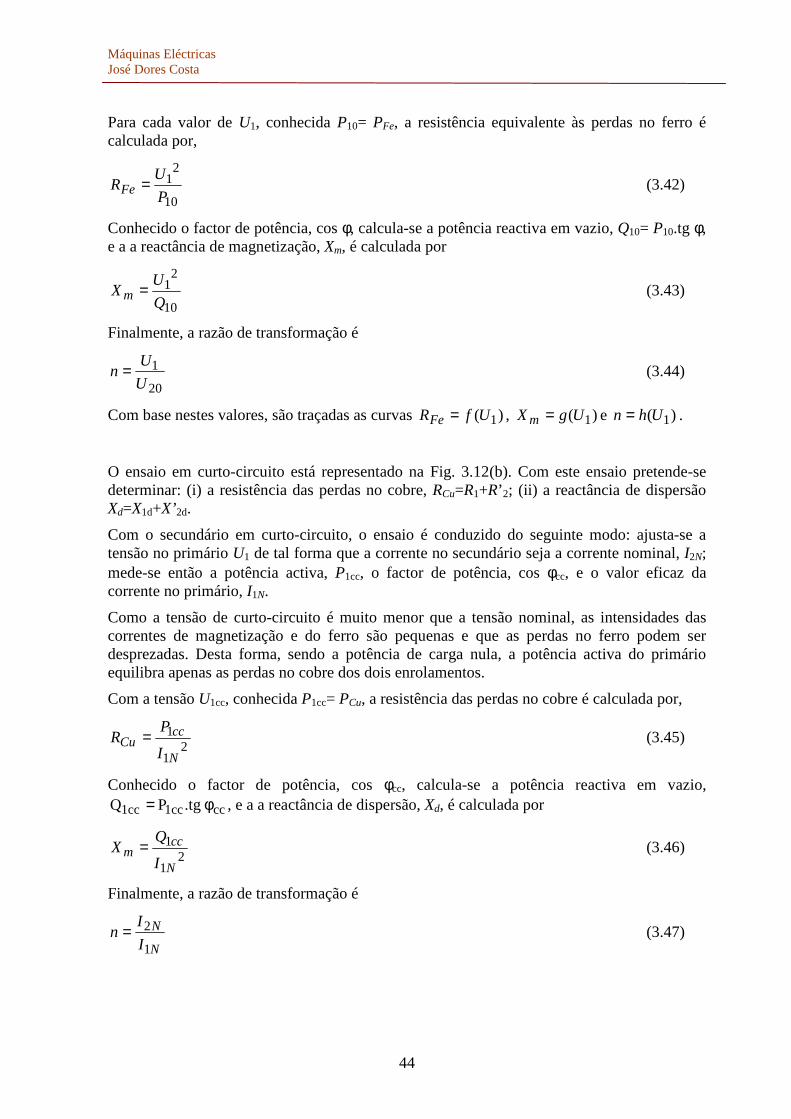
O ensaio em curto-circuito está representado na Fig. 3.12(b). Com este ensaio pretende-se determinar: (i) a resistência das perdas no cobre, RCu=R1+R’2; (ii) a reactância de dispersão Xd=X1d+X’2d.
Com o secundário em curto-circuito, o ensaio é conduzido do seguinte modo: ajusta-se a tensão no primário U1 de tal forma que a corrente no secundário seja a corrente nominal, I2N; mede-se então a potência activa, P1cc, o factor de potência, cos φcc, e o valor eficaz da corrente no primário, I1N.
Como a tensão de curto-circuito é muito menor que a tensão nominal, as intensidades das correntes de magnetização e do ferro são pequenas e que as perdas no ferro podem ser desprezadas. Desta forma, sendo a potência de carga nula, a potência activa do primário equilibra apenas as perdas no cobre dos dois enrolamentos.
Com a tensão U1cc, conhecida P1cc= PCu, a resistência das perdas no cobre é calculada por,
21
1
N
ccCu
I
PR = (3.45)
Conhecido o factor de potência, cos φcc, calcula-se a potência reactiva em vazio,
cc1cc1cc .tgP Q φ= , e a a reactância de dispersão, Xd, é calculada por
21
1
N
ccm
I
QX = (3.46)
Finalmente, a razão de transformação é
N
N
I
In
1
2= (3.47)

Máquinas Eléctricas José Dores Costa
45
3.6 Valores por unidade (pu)
Em sistemas de potência, os transformadores dão origem a circuitos com diferentes níveis de tensão. O sistema por unidade (pu) é um processo de cálculo normalizado que se usa para faciltar a análise e a simulação de redes de energia e de máquinas eléctricas. Os valores pu são uma percentagem dum valor base de uma grandeza eléctrica. Por exemplo, se uma tensão num barramento é de 0,98 pu, isso significa que a tensão é 98 % do valor nominal, ou valor base, desse troço da rede. Para além de outras vantajens, as equações são adimensionais e os valores pu podem dar, imediatamente, uma indicação sobre se a grandeza tem um valor aceitável ou não. Por exemplo, uma tensão de 1,1 pu pode indicar uma sobretensão inaceitável no circuito.
Os valores pu são utilizados para quantificarem diferentes grandezas tais como, impedâncias, tensões, correntes, potência e energia. A ideia central é expressar as várias variáveis como uma fração dos valores escolhidos para os correspondentes valores base. Os valores base são números reais. Fixado o valor base, a conversão para valores pu é feita do seguinte modo:
baseValor
actualValorpuValor = (3.48)
Os valores base são escolhidos, ou são calculados em coerência com o conjunto dos valores base já fixados para as restantes grandezas. Normalmente, fixam-se os valores da tensão e da potência aparente como valores base. A partir destes valores, calculam-se os valores da corrente e da impedância base. Constitui-se então um sistema de valores base coerente para as grandezas em jogo nesse circuito.
Por exemplo, considerem-se como valores base a potencia Sb=100 kVA e a tensão Vb=400V; os valores base da corrente e da impedância são, respectivamente,
Neste sistema de valores base, uma corrente de 125 A terá o valor de 0,5 pu e uma impedância de 3,2 Ω terá o valor de 2 pu, por exemplo. Inversamente, uma corrente de 0,8 pu tem o valor real de 200 A. Generalizando, o valor actual duma grandeza será dada por,
baseValorpuValoractualValor ×= (3.49)
Nos transformadores, a utilização dos valores pu permite eliminar a razão de transformação nos cálculos. Esta situação é ilustrada com o seguinte exemplo: Exemplo 3.1 --------------------------------------- ----------------------------------------------------------------- Considere-se um transformador monofásico de 50 Hz com a potência aparente nominal de 10 MVA representado pelo circuito da Fig. 3.13, onde se desprezaram as perdas no ferro:

Máquinas Eléctricas José Dores Costa
46
Fig. 3.13: Transformador monofásico do exemplo 3.1.
Para o transformador da Fig. 3.13 fixa-se a potência base, Sb, e as tensões base do primário e do secundário, respectivamente. Com base nestes valores, calculam-se os restantes valores base.
Potência base Sb=10 MVA.
Primário (U1N): Secundário (U2):
61 =bU kV 602 =bU kV
7,16661
1 ==b
bb U
SI A 7,166
22 ==
b
bb U
SI A (3.50)
6,32
11 ==
b
bb S
UZ Ω 360
22
2 ==b
bb S
UZ Ω
Tendo em conta (3.48) e (3.50), obtêm-se os seguintes valores pu:
11
11 ==
b
N
U
UU pu 1
2
22 ==
b
N
U
UU pu
3
1
1 10.17,4 −=bZ
Rpu 3
2
2 10.56,0 −=bZ
Rpu
(3.51)
111,01
1 =b
d
Z
X pu 010,0
2
2 =b
d
Z
X pu
67,411
=b
m
Z
X pu
Com base em (3.51), dado que os valores pu das tensões do primário e do secundário são iguais a 1pu, o circuito da Fig. 3. 31 é equivalente ao da Fig. 3.14:

Máquinas Eléctricas José Dores Costa
47
Fig. 3.14: Circuito da Fig. 3.13 em valores pu.
-------------------------------------------------------------------------------------------------------------------------- Os valores das grandezas em jogo no transformador do exemplo 3.1 podem ser calculados através dum circuito equivalente baseado na Fig. 3.9, em unidades SI, ou através do circuito da Fig. 3.14, em valores pu. Estes métodos são exemplificados seguidamente. Exemplo 3.2 --------------------------------------- -----------------------------------------------------------------
Considere-se o transformador monofásico do exemplo 3.1. Pretende-se calcular o valor eficaz da sua tensão de curto-circuito: (a) em volt; (a) em valor por unidade (pu). (a) Primeiramente, começaremos por obter o circuito equivalente da Fig. 3.10:
Fig. 3.15: Circuito equivalente do transformador reduzido ao primário no ensaio de curto-
circuito.
1,0kV60
kV6 ==n
2
22 .nRR =′ , Ω=′ −32 10.20R ; 2
22 .nXX dd =′ , Ω=′ −32 10.38dX
Nos cálculos seguintes consideram-se os valores eficazes das tensões e correntes. No ensaio de curto-circuito, a corrente no secundário reduzida ao primário é igual à corrente nominal do
primário: 7,16662 =′ NIr
A.
A tensão ( )222 dNM XjRIV ′+′′=r
=3,33+j62,5 V.

Máquinas Eléctricas José Dores Costa
48
M
MN Xj
VII
rr
+′= 21 = 1667,08 - j 0,022 A
( ) Md VXjRIUrrr
++= 1111 = 28,35 + j 729,33 V
O valor eficaz da tensão de curto-circuito é 11ccU Ur
= = 729,88 V.
Note-se que a tensão de curto-circuito dos transformadores é normalmente expressa em percentagem da tensão nominal do primário:
%2,126000
88,729U1cc ==
(b) Para obter a tensão de curto-circuito em valores pu, a sequência de cálculo pode ser a mesma mas considerando agora o circuito da Fig. 3.14. Em valores pu, a corrente nominal do secundário é: 122 == Ncc II pu.
A tensão ( ) =+= 222 dNM jXRIVrr
5,56.10-4+j 0,01 pu.
M
M
Xj
VI
rr
+= 11 = 1- j 1,33.10-5 pu
( ) Md VXjRIUrrr
++= 1111 = 4,725.10-3+ j 0,122 pu
O valor eficaz da tensão de curto-circuito é 11ccU Ur
= = 0,122 pu.
A tensão de curto-circuito corresponde a 12,2%, tal como referido na (a). Finalmente, usando (3.49) pode-se calcular os valores actuais de todas as grandezas em jogo. Por exemplo, para calcular a tensão VM em unidades SI, medida do lado do primário, faz-se
=MVr
(5,56.10-4+j 0,01).6 kV = 3,33+j62,5 V valor este que é igual ao valor calculado na (a). -------------------------------------------------------------------------------------------------------------------------- Considere-se a impedância do circuito da Fig. 3.11(b) expressa em valores por unidade e a representação da Fig. 3.16. No ensaio de de curto-circuito, a corrente no primário é igual à corrente nominal. Em valores pu, será 111 == Ncc II pu. Tendo em conta que
ccNcc ZIU .11 = , em valores pu a impedância de curto-circuito é igual ao valor da tensão de
curto-circuito. Por exemplo, se a tensão de curto-circuito é 5%, então a impedância de curto-

Máquinas Eléctricas José Dores Costa
49
circuito é também 5%. Quer isto dizer que á tensão nominal, a corrente de curto-circuito será 20 vezes maior que a corrente nominal.
Fig. 3.16: Impedância de curto-circuito. A tensão de curto-circuito é um elemento fornecido pelos fabricantes de transformadores e o seu conhecimento é importante para os cálculos de redes eléctricas. A tensão, ou a impedância, de curto-circuito é um valor que é imposto por normas em função da potência e das tensões nominais. Considere-se o circuito equivalente da Fig. 3.10 que se reproduz na figura seguinte:
Fig. 3.17: Circuito equivalente simplificado reduzido ao primário. O valor eficaz da tensão real na carga é dada por (3.39):
21
22 U
n
nU ′= (3.52)
Em vazio, do circuito da Fig. 3.17 resulta que a tensão no secundário é 120 UU =′ ; em carga,
a tensão é ccZ212 IjUU ′−=′ . A impedância longitudinal, ou impedância de curto-circuito, dá
origem a uma queda de tensão interna no transformador, motivo pelo qual e a tensão em carga é menor que a tensão em vazio (com cargas resistivas ou de caracter indutivo). Chama-se regulação de tensão (ou queda de tensão) do transformador à diferença entre os valores eficazes da tensão em vazio, U20, e da tensão em carga, U2. Normalmente, a queda de tensão do transformador é dada em valores percentuais da tensão em vazio:

Máquinas Eléctricas José Dores Costa
50
1
21
20
220U
UU
U
UUU
′−=
−=∆ (3.53)
Chama-se característica externa (ou característica em carga) do transformador à função U2= f ( I2) com cos Φ constante. Esta função está representada graficamente na Fig. 3.18.
Fig. 3.18: Característica externa.
O cálculo da regulação de tensão é simplificado quando se usam valores pu, o que corresponde a usar (3.53) com os valores das tensões em vazio iguais aos valores das tensões base. Exemplo 3.3 --------------------------------------- -----------------------------------------------------------------
Considere-se o transformador monofásico do exemplo 3.1 alimentado à tensão nominal U1=6kV. Pretende-se calcular a regulação de tensão quando I2=150 A e com uma carga com factor de potência 0,866 indutivo.
O modelo da Fig. 3.14 pode ser simplificado para o circuito da Fig. 3.19.
Fig. 3.19: Circuito equivalente simplificado. Para o cálculo de (3.53) é calcula-se a tensão em carga quando se alimenta o primário com a tensão nominal U1=1 pu e estando a corrente de carga está atrasada de 30º em relação a U2. Tendo em conta que a corrente base é I2b=166,7 A, e tomando como referencial a tensão U2, a corrente no secundário em valores pu é:

Máquinas Eléctricas José Dores Costa
51
pue289,0 º30j2
−=Ir
No diagrama vectorial da Fig. 3.20, representam-se a correntes e as tensões no circuito equivalente:
1jcc221 e1IjUU φ=+= Z
rrr 093,0j058,0UUZIU cc2 +=+==∆ XRrrr
pu.
2UOC =
θ∆= sin.UCA
θ∆= cos.UAB
Fig. 3.20: Diagrama vectorial das tensões.
Da Fig. 3.20 conclui-se que
( ) θ∆++θ∆= sin.jcos.U 21 UUUr
Desta equação resulta:
21
1
cos.cos
sin.sen
UU
U
+θ∆=φθ∆=φ
Substindo valores e resolvendo, obtém-se:
pu94,0
º3,5
2
1
==φ
U
A regulação de tensão é 1-U2=0,06, ou seja 6%. Em unidades SI, a regulação (ou queda) de tensão é 3,6 kV.

Máquinas Eléctricas José Dores Costa
52
3.7 Problemas 3.1 Calcular a regulação de tensão no mesmo transformador alimentado à tensão nominal U1=6kV quando I2=1 pu e com uma carga com factor de potência 0,9 indutivo.
3.2 A figura 3.P1 representa o esquema equivalente dum transformador monofásico de 50 Hz. O valor eficaz da tensão no primário é U1=230 V e desprezam-se as perdas no ferro. Calcule:
Fig. 3.P1
R1=0,8 Ω; R1=0,7 Ω;
Xd1=0,93 Ω; Xd2=0,65
Ω;
Xm=68 Ω
a) o valor instantâneo da tensão U2 com o transformador em vazio; b) o valor eficaz de I2 com o secundário em curto-circuito se U1=23V; c) o coeficiente de auto-indução da bobina do primário; d) o coeficiente de auto-indução da bobina do secundário; e) a relutância magnética do núcleo de ferro se n1=250 espiras.
3.3 O circuito da Fig. 3.P2 representa um transformador monofásico para a frequência de 50 Hz: R1 e R2 são as resistências das bobinas no primário e do secundário, respectivamente, e X1d é a reactância de dispersão do primário; Xm é a reactância de magnetização; despreza-se a dispersão magnética do secundário. As bobinas do primário e do secundário têm n1 e n2 espiras, respectivamente. Com o transformador em vazio, calcule:
n1=100; n2=60; R1=9 Ω; R2=5 Ω;
X1d=25 Ω; Xm=166 Ω; RFe=255 Ω;
Uef=230V
a) o valor eficaz da corrente no primário; b) o valor eficaz da tensão no secundário,
UAB; c) as perdas por no cobre; d) as perdas no ferro.
Fig. 3.P2
3.4 Considere o transformador monofásico representado pelo circuito da Fig. 3.P1. A reactância de dispersão do secundário é X2d=13 Ω.
a) Desenhe o esquema equivalente do transformador reduzido à tensão do secundário. b) Calcule o valor instantâneo das correntes no i1(t) e i2(t), quando o transformador está em
curto-circuito.
Máquinas Eléctricas José Dores Costa
53
c) O transformador alimenta uma carga cuja impedância, à tensão do secundário, é ZC =5+2j Ω. Calcule a tensão nesta carga.
d) Desprezando as perdas no ferro, qual é o rendimento do transformador no caso da (c)? e) Calcule a regulação de tensão no caso da (c). f) Calcule as potências activas, reactiva e aparente postas em jogo no primário do
transformador.
3.5 Um transformador monofásico de 50 kVA, 240V: 2400V, 50 Hz, tem uma reactância de
magnetização, medida dos terminais de 240V, de 36 Ω. O enrolamento do primário, a 240 V,
tem uma reactância de dispersão de 28 mΩ e o de 2400V tem uma reactância de dispersão de
11 mΩ. a) Se o valor eficaz da tensão no primário for 230V, qual é o valor eficaz da tensão no
secundário com o transformador em vazio? b) O transformador é colocado em curto-circuito. Qual é a tensão que deve ser aplicada ao
primário para que a corrente no secundário seja a corrente nominal? c) Apresente os valores das alíneas anteriores em valores pu. d) Obtenha o circuito eléctrico equivalente do transformador em valores por unidade.
3.6 Os ensaios dum transformador monofásico de 2 kVA, 240V:110V, 50 Hz, deram os seguintes resultados:
U1 [V] I1 [A] P1 [W]
Em vazio 240 0,95 35
Em curto-circuito 8 8,0 30 O transformador alimenta a carga nominal com o factor de potência 0,9 indutivo. Calcule:
a) o rendimento do transformador quando alimenta a carga nominal com o factor de potência 0,9 indutivo.
b) a regulação de tensão. Apresente os resultados em unidades SI e em valores pu.
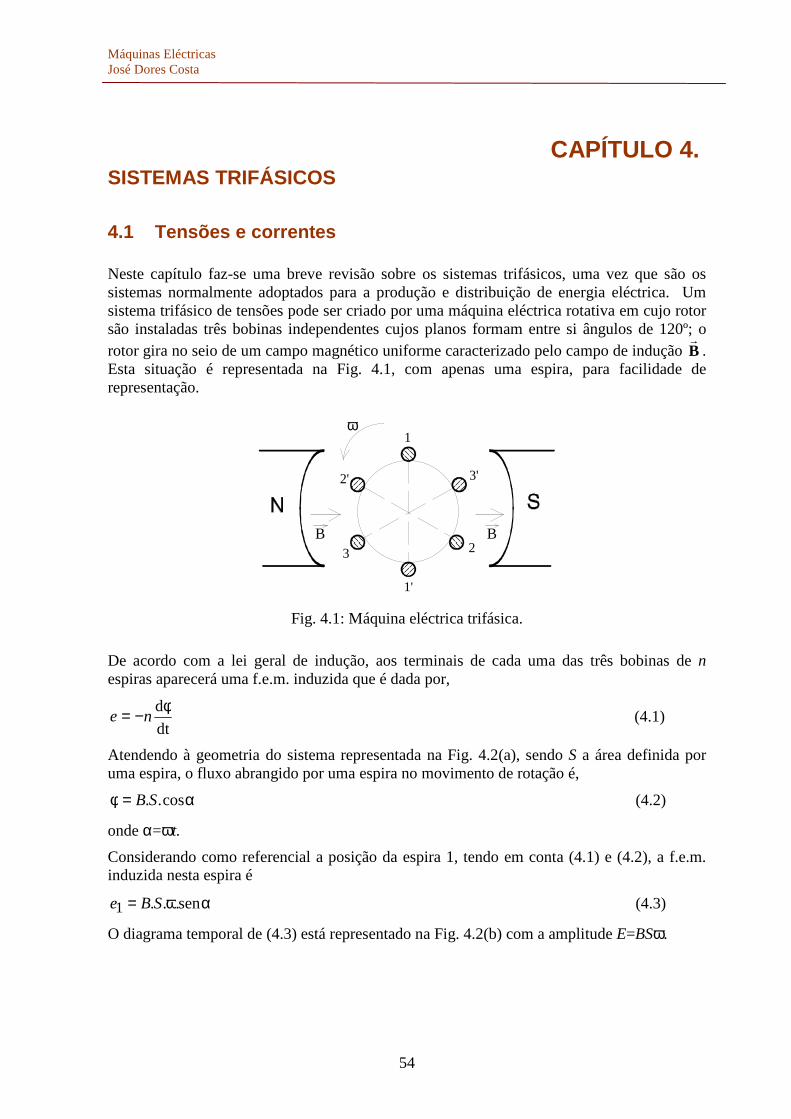
Máquinas Eléctricas José Dores Costa
54
CAPÍTULO 4. SISTEMAS TRIFÁSICOS
4.1 Tensões e correntes Neste capítulo faz-se uma breve revisão sobre os sistemas trifásicos, uma vez que são os sistemas normalmente adoptados para a produção e distribuição de energia eléctrica. Um sistema trifásico de tensões pode ser criado por uma máquina eléctrica rotativa em cujo rotor são instaladas três bobinas independentes cujos planos formam entre si ângulos de 120º; o rotor gira no seio de um campo magnético uniforme caracterizado pelo campo de indução B
r.
Esta situação é representada na Fig. 4.1, com apenas uma espira, para facilidade de representação.
1
2
2'
3
3'
B B
ω
1'
Fig. 4.1: Máquina eléctrica trifásica.
De acordo com a lei geral de indução, aos terminais de cada uma das três bobinas de n espiras aparecerá uma f.e.m. induzida que é dada por,
dt
dφ−= ne (4.1)
Atendendo à geometria do sistema representada na Fig. 4.2(a), sendo S a área definida por uma espira, o fluxo abrangido por uma espira no movimento de rotação é,
α=φ cos..SB (4.2)
onde α=ωt.
Considerando como referencial a posição da espira 1, tendo em conta (4.1) e (4.2), a f.e.m. induzida nesta espira é
αω= sen...1 SBe (4.3)
O diagrama temporal de (4.3) está representado na Fig. 4.2(b) com a amplitude E=BSω.
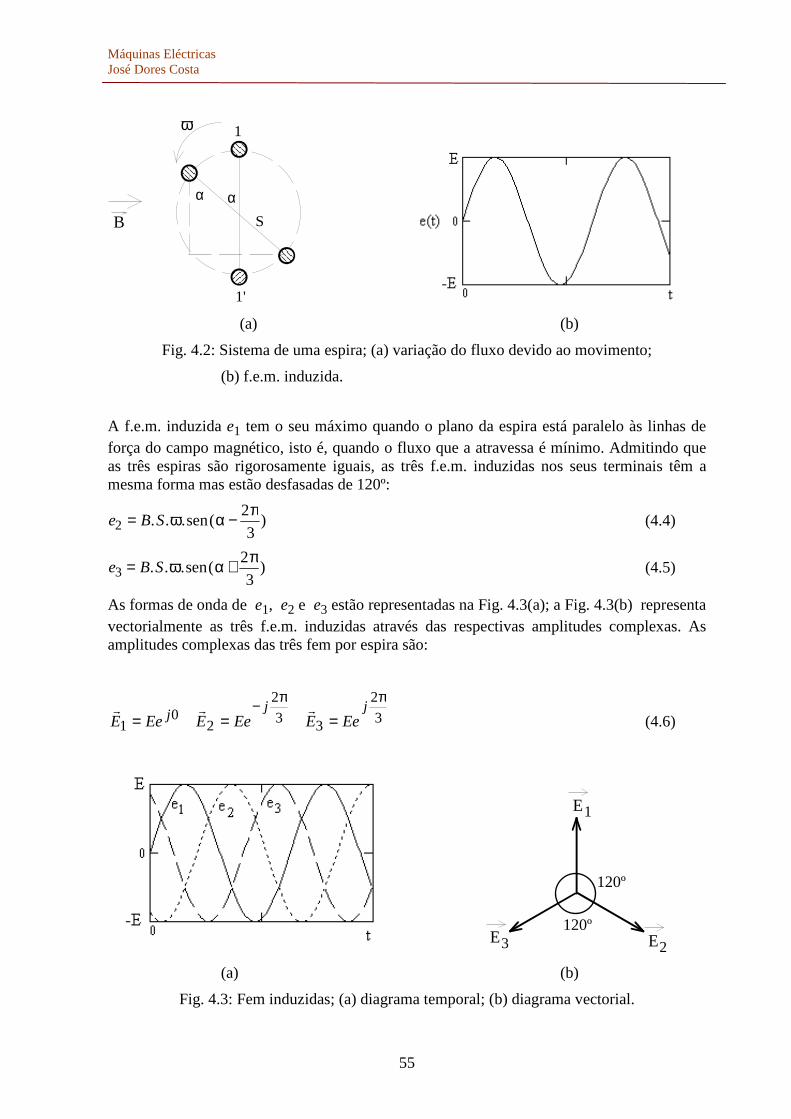
Máquinas Eléctricas José Dores Costa
55
1
1'
B S
αα
ω
(a) (b)
Fig. 4.2: Sistema de uma espira; (a) variação do fluxo devido ao movimento;
(b) f.e.m. induzida.
A f.e.m. induzida e1 tem o seu máximo quando o plano da espira está paralelo às linhas de força do campo magnético, isto é, quando o fluxo que a atravessa é mínimo. Admitindo que as três espiras são rigorosamente iguais, as três f.e.m. induzidas nos seus terminais têm a mesma forma mas estão desfasadas de 120º:
e B S22
3= −. . . ( )ω α π
sen (4.4)
e B S32
3= +. . . ( )ω α π
sen (4.5)
As formas de onda de e1, e2 e e3 estão representadas na Fig. 4.3(a); a Fig. 4.3(b) representa vectorialmente as três f.e.m. induzidas através das respectivas amplitudes complexas. As amplitudes complexas das três fem por espira são:
3
2
33
2
20
1
ππ−===
jjj EeEEeEEeE
rrr (4.6)
E1
E2E3
120º
120º
(a) (b)
Fig. 4.3: Fem induzidas; (a) diagrama temporal; (b) diagrama vectorial.

Máquinas Eléctricas José Dores Costa
56
A amplitude das fem induzidas nas três bobinas, com n espiras cada, é E=nBSω.
Cada um dos três enrolamentos do alternador (são designados por fases) poderá alimentar um circuito monofásico independente, como se representa na Fig. 4.4. As tensões nas cargas, u1, u2 e u3, formam um sistema trifásico de tensões que pode ser representado por um diagrama vectorial igual ao da Fig. 4.3(b).
1
1'
2
2'
3
3'
Z
Z Z
1
23
1
2
3
I 2
I 3
I 1
U
U
U
Fig. 4.4: Três circuitos monofásicos independentes.
O esquema da Fig. 4.1 descreve o princípio de funcionamento de um alternador trifásico que será estudado mais adiante. O alternador dispõe de três fases independentes e, se cada uma delas alimentar uma carga própria, o sistema completo será constituído pelos três circuitos eléctricos distintos esquematizados na Fig. 4.4. Esta repartição da potência eléctrica total pelos três circuitos permite utilizar condutores de menor secção e melhorar as características construtivas do alternador. No entanto, a distribuição representada na Fig. 4.4 não é interessante porque seria necessário utilizar seis condutores para alimentar a totalidade das cargas.
Obtém-se um sistema mais simples se os terminais 1', 2' e 3' forem ligados entre si, formando um condutor comum às três fases, como se representa na Fig. 4.5; neste caso, o sistema trifásico necessita de quatro condutores apenas, com a vantagem de existir um nó comum em relação ao qual são medidas as três tensões. Os nós O e O' são os pontos neutros do alternador e da carga, respectivamente, e o condutor OO' é designado por condutor do neutro. O sistema da Fig. 4.5 é o circuito básico de uma distribuição trifásica com três tensões sinusoidais de igual amplitude produzidas pela mesma máquina e desfasadas entre si de 120º; estas tensões têm a mesma frequência e têm valores eficazes iguais.
Num sistema de quatro condutores as tensões podem ser medidas dos dois modos representados na Fig. 3.6: as tensões entre fase e neutro são designadas por tensões simples; as tensões entre as fases são designadas por tensões compostas. As amplitudes complexas das três tensões compostas são também representadas por três vectores com o mesmo comprimento e desfasados entre si de 120º. Da Fig. 4.6(a) resulta:
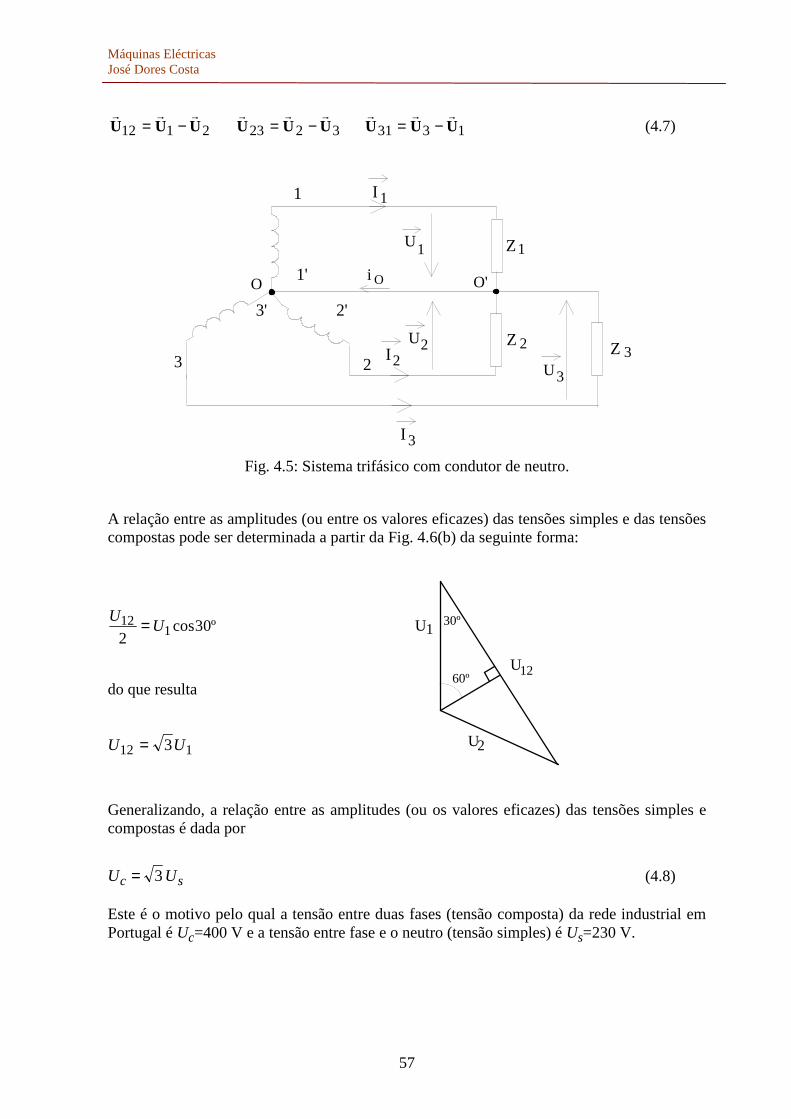
Máquinas Eléctricas José Dores Costa
57
133132232112 UUUUUUUUUrrrrrrrrr
−=−=−= (4.7)
1
1'
2
2'
3
3'
Z
Z Z
1
23
1
2
3
I 2
I 3
I 1
O O'
U
U
U
i O
Fig. 4.5: Sistema trifásico com condutor de neutro.
A relação entre as amplitudes (ou entre os valores eficazes) das tensões simples e das tensões compostas pode ser determinada a partir da Fig. 4.6(b) da seguinte forma:
UU12
1230= cos º
do que resulta
U U12 13=
1U
2U
U12
30º
60º
Generalizando, a relação entre as amplitudes (ou os valores eficazes) das tensões simples e compostas é dada por
U Uc s= 3 (4.8) Este é o motivo pelo qual a tensão entre duas fases (tensão composta) da rede industrial em Portugal é Uc=400 V e a tensão entre fase e o neutro (tensão simples) é Us=230 V.

Máquinas Eléctricas José Dores Costa
58
1
23
120º
120º
U
UU
1U 2U U3
U12
23U
31U
1
2
3
0
U12
23U
31U
30º
a) b)
Fig. 4.6: Tensões trifásicas; (a) esquema; (b) diagrama vectorial.
Além da ligação em estrela representada na Fig. 4.5, também se utiliza a ligação em triângulo que está representada na Fig. 4.7. Neste caso, não existe um ponto comum entre as três fases, i. e., não existe um ponto neutro, e a tensão em cada enrolamento do alternador é a tensão composta. Note-se que, na Fig. 4.7, as cargas Z continuam ligadas em estrela mas podem, em alternativa, ser ligadas em triângulo.
1
23
Z
Z Z
1
23
U1
U2 U3
U12
i 23
i31
i12
i 2
i1
Fig. 4.7: Alternador com ligação em triângulo.
Aplicando a lei dos nós aos terminais do alternador verifica-se,
312332312212311 IIIIIIIIIrrrrrrrrr
−=−=−= (4.9)

Máquinas Eléctricas José Dores Costa
59
Na Fig. 4.7 considerou-se que as três bobinas do alternador estão ligadas em triângulo e que as três impedâncias de carga Z estão ligadas em estrela. Designam-se por correntes nas
linhas as correntes eléctricas 321 e IIIrrr
nos condutores que alimentam o conjunto das
cargas ou que interligam os diferentes sistemas eléctricos. Na associação em estrela, as correntes nas fases coincidem com as correntes nas linhas. Numa associação em triângulo as correntes nas fases 312312 e III
rrr são diferentes das correntes nas linhas, de acordo com
(4.9).
Num sistema de cargas equilibradas as impedâncias de cada fase são iguais. Representando
por φ= jeZZr
as impedâncias das cargas do circuito da Fig. 4.7, as correntes nas linhas são obtidas do seguinte modo:
φ−π−∠==
φ−π−∠==
φ−∠==
3
4
3
2
313131
232323
121212
Z
U
Z
U
Z
U
Z
UI
Z
UI
Z
UI
r
rr
r
rr
r
rr
(4.10)
Da Fig. 4.8, conclui-se que as correntes nas linhas (i1, i2 e i3) são diferentes das intensidades nas fases e que constituem também uma estrela desfasada de 30º da estrela das correntes nas fases (i12, i23 e i31).
Com os sentidos adoptados na Fig. 4.7 para as correntes no alternador, no diagrama vectorial da Fig. 4.8, as correntes nas linhas ocupam as posições das tensões compostas enquanto que as correntes nas fases ocupam as posições das tensões simples (as correntes nas linhas estão em avanço das correntes nas fases). Com base nesta semelhança, os cálculos que foram feitos para as tensões permitem concluir que as amplitudes (ou os valores eficazes) das correntes nas linhas são 3 vezes maiores que os correspondentes valores das correntes nas fases.
I Il f= 3 (4.11)
onde Il representa a amplitude (ou o valor eficaz) das correntes nas linhas e If representa a amplitude (ou o valor eficaz) das correntes nas fases.
Por exemplo, com o alternador ligado em triângulo as correntes nos enrolamentos são 3 vezes menores que as intensidades nos cabos de interligação (linhas) e nas cargas Z.
Note-se que a soma de três vectores de igual comprimento e desfasados de 120º é zero. Assim, num sistema de cargas equilibradas (estrela simétrica) a soma das correntes nas linhas ou nas fases é nula, pelo que numa ligação em estrela o condutor neutro não é percorrido por qualquer corrente eléctrica.
0321 =++= IIIIrrrr
O (4.12)
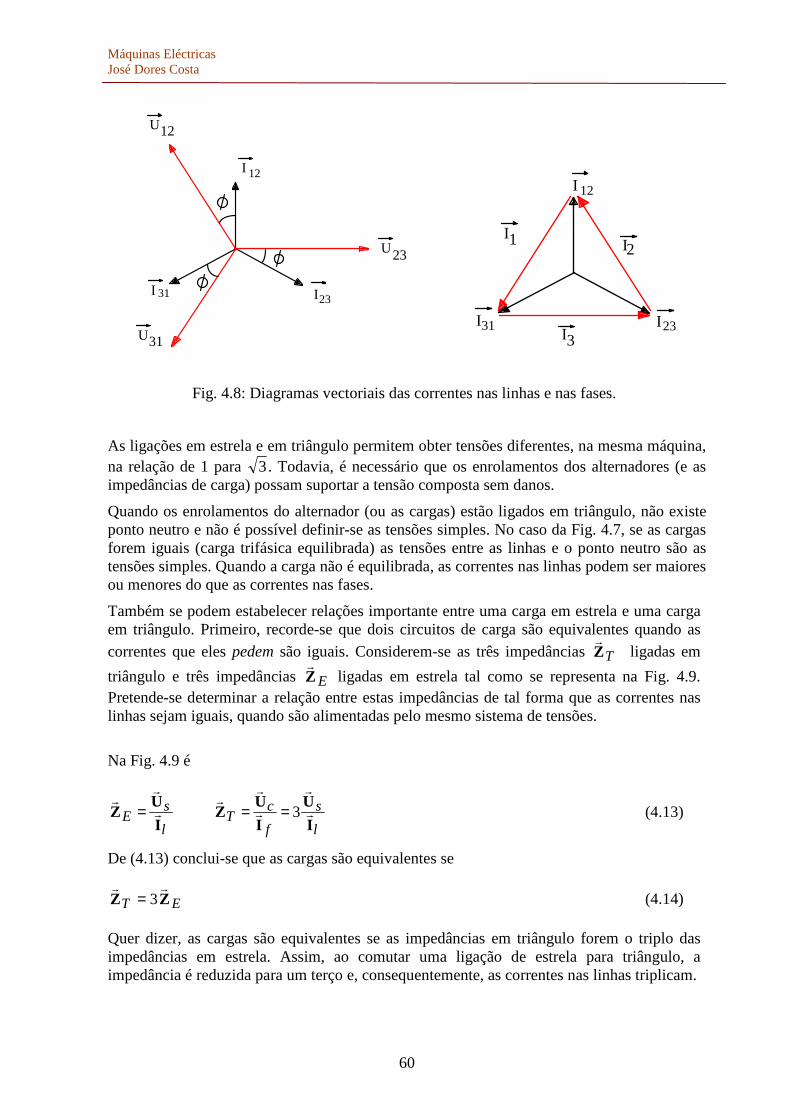
Máquinas Eléctricas José Dores Costa
60
U
U
U
12
23
31
I
II
12
2331
I
I I
II
I
12
3
12
2331
Fig. 4.8: Diagramas vectoriais das correntes nas linhas e nas fases.
As ligações em estrela e em triângulo permitem obter tensões diferentes, na mesma máquina, na relação de 1 para 3. Todavia, é necessário que os enrolamentos dos alternadores (e as impedâncias de carga) possam suportar a tensão composta sem danos.
Quando os enrolamentos do alternador (ou as cargas) estão ligados em triângulo, não existe ponto neutro e não é possível definir-se as tensões simples. No caso da Fig. 4.7, se as cargas forem iguais (carga trifásica equilibrada) as tensões entre as linhas e o ponto neutro são as tensões simples. Quando a carga não é equilibrada, as correntes nas linhas podem ser maiores ou menores do que as correntes nas fases.
Também se podem estabelecer relações importante entre uma carga em estrela e uma carga em triângulo. Primeiro, recorde-se que dois circuitos de carga são equivalentes quando as correntes que eles pedem são iguais. Considerem-se as três impedâncias TZ
r ligadas em
triângulo e três impedâncias EZr
ligadas em estrela tal como se representa na Fig. 4.9. Pretende-se determinar a relação entre estas impedâncias de tal forma que as correntes nas linhas sejam iguais, quando são alimentadas pelo mesmo sistema de tensões.
Na Fig. 4.9 é
l
s
f
cT
l
sE
I
U
I
UZ
I
UZ r
r
r
rr
r
rr
3=== (4.13)
De (4.13) conclui-se que as cargas são equivalentes se
ET ZZrr
3= (4.14) Quer dizer, as cargas são equivalentes se as impedâncias em triângulo forem o triplo das impedâncias em estrela. Assim, ao comutar uma ligação de estrela para triângulo, a impedância é reduzida para um terço e, consequentemente, as correntes nas linhas triplicam.
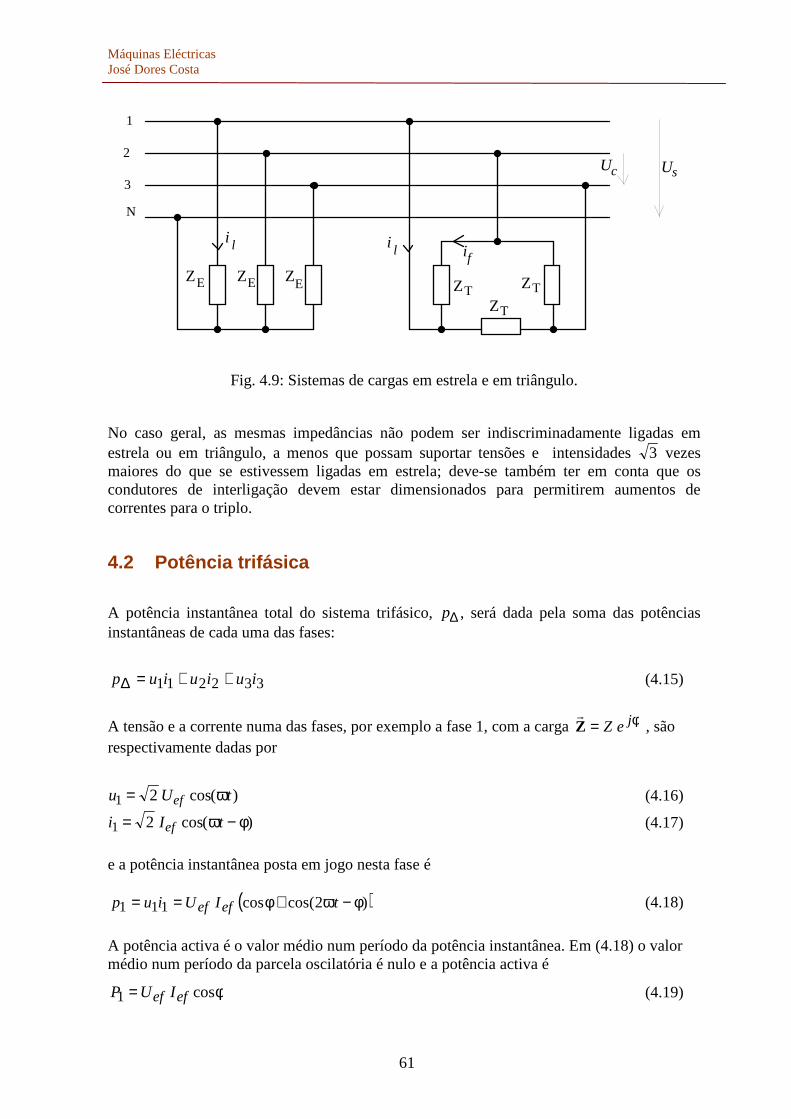
Máquinas Eléctricas José Dores Costa
61
Z Z ZE E E
i l
1
2
3
N
ZT ZT
ZT
i l if
UsUc
Fig. 4.9: Sistemas de cargas em estrela e em triângulo.
No caso geral, as mesmas impedâncias não podem ser indiscriminadamente ligadas em estrela ou em triângulo, a menos que possam suportar tensões e intensidades 3 vezes maiores do que se estivessem ligadas em estrela; deve-se também ter em conta que os condutores de interligação devem estar dimensionados para permitirem aumentos de correntes para o triplo.
4.2 Potência trifásica
A potência instantânea total do sistema trifásico, p∆ , será dada pela soma das potências instantâneas de cada uma das fases:
332211 iuiuiup ++=∆ (4.15)
A tensão e a corrente numa das fases, por exemplo a fase 1, com a carga φ= jeZZr
, são respectivamente dadas por
u U tef1 2= cos( )ω (4.16)
i I tef1 2= −cos( )ω φ (4.17)
e a potência instantânea posta em jogo nesta fase é
( ))2cos(cos111 φ−ω+φ== tIUiup efef (4.18)
A potência activa é o valor médio num período da potência instantânea. Em (4.18) o valor médio num período da parcela oscilatória é nulo e a potência activa é
φ= cos1 efef IUP (4.19)

Máquinas Eléctricas José Dores Costa
62
A potência activa total do sistema trifásico é a soma das potências activas de cada uma das fases:
321 PPPPt ++= (4.20)
No caso de um sistema de tensões sinusoidais em estrela simétrica, e com cargas equilibradas, a potência activa trifásica será o triplo da potência activa monofásica:
φ=φ= cos3cos3 lclst IUIUP (4.21)
em que Us representa o valor eficaz da tensão simples e Uc o da tensão composta; Il é o
valor eficaz da corrente na linha e cos φ é o factor de potência.
De acordo com (4.21) as potências totais reactiva, Qt, e aparente, St, são, respectivamente,
lclst
lclst
IUIUS
IUIUQ
33
sen3sen3
==
φ=φ= (4.22)
A potência posta em jogo numa carga ligada em triângulo é tripla da potência posta em jogo se a carga estiver ligada em estrela, o que se deduz a partir de (4.21).
Recorde-se que as unidades das potências activa, reactiva e aparente são W, VAr (Volt-Ampére reactivo) e VA, respectivamente. Industrialmente, a potência dos alternadores e, em geral, das instalações é dada em KVA, uma vez que o factor de potência é imposto pela carga, podendo esta ser muito variável.
4.3 Grandezas não sinusoidais
Devido às características construtivas dos alternadores (existência de cavas e dentes no ferro, por exemplo), as tensões impostas à rede podem não ser sinusoidais puras; por outro lado, cargas fortemente não lineares como, por exemplo, os rectificadores e outros conversores electrónicos, distorcem as tensões e corrente. Nestes casos, as tensões e/ou correntes são periódicas mas contêm harmónicas de frequência superior à primeira (50 Hz, normalmente), e os valores eficazes e as potências activa e reactiva diferem dos que temos vindo a considerar.
Considere-se um sistema trifásico de tensões alternadas não sinusoidais. As tensões de cada uma das fases podem ser desenvolvidas em série de Fourier. Admitindo que o valor médio das tensões é nulo e que só existem os termos de ordem ímpar, n=1, 3, 5,..., o desenvolvimento em série de Fourier das tensões pode ser escrito na forma,
∑ ω==n
n tnUtuu )(sen)(1 (4.23a)

Máquinas Eléctricas José Dores Costa
63
∑π−ω=−=
nn ntnU
Ttuu )
3
2(sen)
3(2 (4.23b)
∑π−ω=−=
nn ntnU
Ttuu )
3
4(sen)
3
2(3 (4.23c)
com ω=2π/T.
Para cada fase, as desfasagens das harmónicas de ordem n em relação à primeira são as
seguintes: na fase 1é zero, na fase 2 é −23
π n e na fase 3 é −4
3π n
.
De seguida, veremos de que modo o comportamento do sistema depende de n/3. Considere-se que n=3q+r, em que q é o cociente e r é o resto da divisão de n por 3:
n q r r q= + = =3 0 1 2 0 1 2 3, , . , , , ,....
Quando r=0, n é múltiplo de 3 e, porque q é um inteiro positivo, as harmónicas de ordem n das três tensões estão em fase, têm a mesma amplitude e u1n+u2n+u3n= u1n≠0. Neste caso, as harmónicas de ordem n não formam um sistema trifásico e designa-se por sistema homopolar.
Quando r=1, as harmónicas de ordem n das três tensões têm as seguintes desfasagens: na fase
1é zero, na fase 2 é
π+π−3
22q e na fase 3 é
π+π−3
44q . Neste caso, porque as
harmónicas têm a mesma amplitude, verifica-se que u1n+u2n+u3n=0. As harmónicas de ordem n formam um sistema trifásico com a sequência de fases igual à do sistema principal (1-2-3), tal como se representou na Fig. 4.6) e, por isso, diz-se que o sistema é directo.
Quando r=2, as harmónicas de ordem n das três tensões têm as seguintes desfasagens: na fase
1é zero, na fase 2 é
π+π−3
42q e na fase 3 é
π+π−3
84q . Também neste caso
verifica-se que existe uma desfasagem de 120º entre as tensões e u1n+u2n+u3n=0; no entanto, a sequência de fases das harmónicas de ordem n é inversa da do sistema principal (1-3-2), constituindo o que se designa por sistema inverso.
Os sistemas directos e inversos são sistemas trifásicos ao passo que o sistema homopolar não é e faz com que os sistemas não sinusoidais tenham características diferentes dos sistemas puramente sinusoidais. Repare-se que o valor eficaz da tensão simples não sinusoidal é dado por
.....27
25
23
21 ++++= efefefefsef UUUUU (4.24)

Máquinas Eléctricas José Dores Costa
64
As tensões compostas são obtidas através de (4.7):
133132232112 UUUUUUUUUrrrrrrrrr
−=−=−= (4.25)
Dado que as harmónicas múltiplas de 3 estão todas em fase, ao se efectuarem as subtracções de (4.25), elas anulam-se e deixam de fazer parte das tensões compostas. Assim, o valor eficaz das tensões compostas não sinusoidais é
.....00 27
25
21 +++++= efefefcef UUUU (4.26)
Neste caso, para o sistema homopolar, verifica-se sefcef UU 3< .
Nos enrolamentos em triângulo de um alternador, se as tensões compostas são sinusóides perfeitas e formam uma estrela simétrica, a soma das três tensões é nula. No caso de existirem harmónicas de ordem múltipla de 3 (existe um sistema homopolar), a soma das três tensões não é nula porque as componentes homopolares estão em fase. Quer isto dizer que os enrolamentos do estator vão ser percorridos por correntes, mesmo que esteja em vazio, que poderão ser suficientemente elevadas para provocarem um sobre aquecimento destrutivo.
Num sistema trifásico simétrico com carga equilibrada, como o da Fig. 24.5, desde que não existam harmónicas de ordem múltipla de 3, de acordo com (4.12), a corrente no condutor de neutro é nula. Se existirem harmónicas de ordem múltipla de 3, a corrente no neutro não é nula:
0...33 93 ≠++= ωω iiiO (4.27)
Se o sistema da Fig. 4.5 for um sistema sinusoidal simétrico com carga equilibrada, a corrente no neutro é nula e os pontos neutros O e O' estão ao mesmo potencial, mesmo que se retire o condutor neutro. No caso de existirem tensões no alternador com harmónicas múltiplas de 3, ao ser desligado o condutor de neutro as correntes nas linhas, e nas fases, não têm componentes homopolares porque, como estas estariam em fase, o somatório das correntes no nó O' não seria nulo, violando a lei dos nós. Todavia, devido às harmónicas múltiplas de 3 nas tensões do lado do gerador, a tensão entre o nós O e O' deixa de ser zero.
Por este motivos, os regulamentos impõem limites máximos admissíveis para o valor das harmónicas de ordem 3 (e seus múltiplos) nos alternadores e tornam obrigatória a instalação de relés de tensão homopolar que limitem o valor máximo da tensão entre o ponto neutro e a terra quando se utilizam sistemas trifásicos sem condutor de neutro.
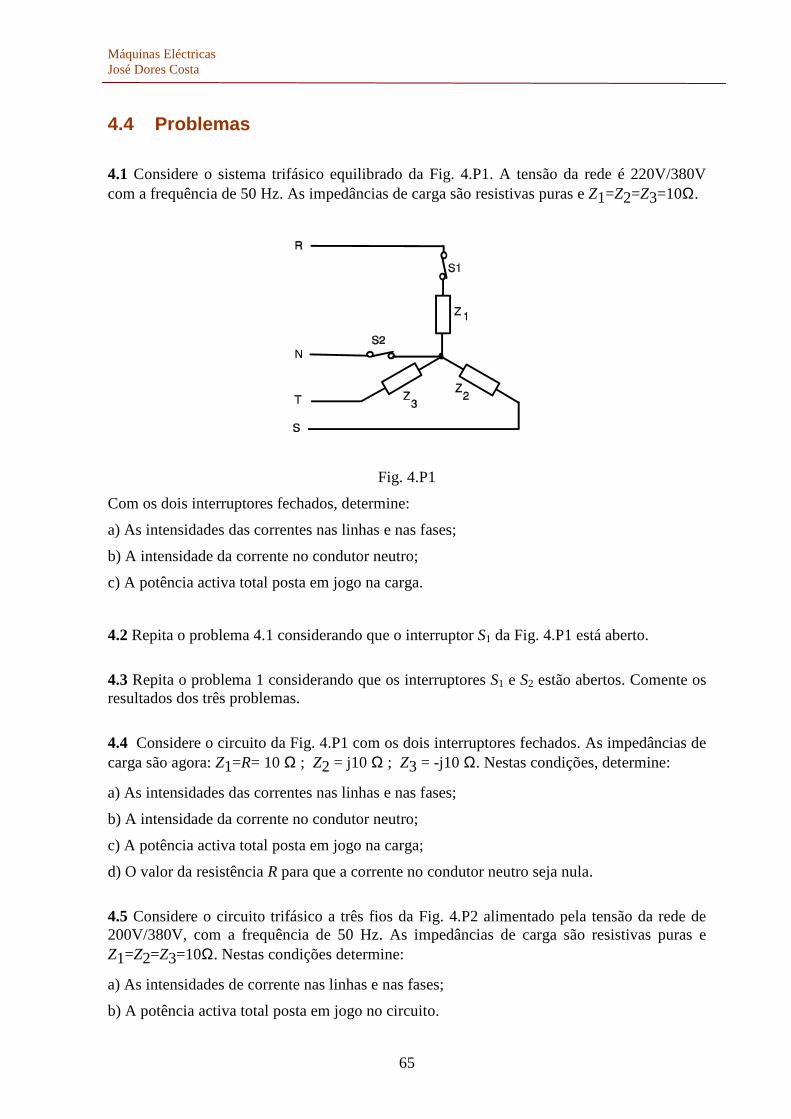
Máquinas Eléctricas José Dores Costa
65
4.4 Problemas
4.1 Considere o sistema trifásico equilibrado da Fig. 4.P1. A tensão da rede é 220V/380V com a frequência de 50 Hz. As impedâncias de carga são resistivas puras e Z1=Z2=Z3=10Ω.
Fig. 4.P1
Com os dois interruptores fechados, determine:
a) As intensidades das correntes nas linhas e nas fases;
b) A intensidade da corrente no condutor neutro;
c) A potência activa total posta em jogo na carga.
4.2 Repita o problema 4.1 considerando que o interruptor S1 da Fig. 4.P1 está aberto.
4.3 Repita o problema 1 considerando que os interruptores S1 e S2 estão abertos. Comente os resultados dos três problemas.
4.4 Considere o circuito da Fig. 4.P1 com os dois interruptores fechados. As impedâncias de carga são agora: Z1=R= 10 Ω ; Z2 = j10 Ω ; Z3 = -j10 Ω. Nestas condições, determine:
a) As intensidades das correntes nas linhas e nas fases;
b) A intensidade da corrente no condutor neutro;
c) A potência activa total posta em jogo na carga;
d) O valor da resistência R para que a corrente no condutor neutro seja nula.
4.5 Considere o circuito trifásico a três fios da Fig. 4.P2 alimentado pela tensão da rede de 200V/380V, com a frequência de 50 Hz. As impedâncias de carga são resistivas puras e Z1=Z2=Z3=10Ω. Nestas condições determine:
a) As intensidades de corrente nas linhas e nas fases;
b) A potência activa total posta em jogo no circuito.

Máquinas Eléctricas José Dores Costa
66
Fig. 4.P2
4.6 O circuito da Fig. 4.P2 representa um motor de indução de rotor em curto-circuito com a potência nominal de 5,5 kW alimentado pela rede eléctrica de BT, 380V, 50Hz. O factor de potência a plena carga é 0,87 e o rendimento nesta situação é 90%. Com estes dados, determine:
a) A intensidade da corrente eléctrica no cabo de alimentação do motor;
b) A intensidade da corrente em cada uma das fases do motor.
4.7 O motor do problema anterior é ligado ao quadro eléctrico por um cabo tripolar com
150m de comprimento e cujos condutores são em cobre e têm uma secção igual a 4mm2. A corrente de arranque directo é 6,3IN. Com estes dados determine:
a) A queda de tensão no cabo quando o motor funciona a plena carga;
b) A tensão composta no motor, no instante em que se efectua o arranque directo;
c) Repita a b) mas com o arranque em estrêla-triângulo.
4.8 Um quadro eléctrico de uma instalação industrial, alimentada pela rede de 230V/400V, 50 Hz, alimenta os seguintes circuitos trifásicos:
Descrição Potência [kW] cos φφφφ (indutivo)
1. Iluminação 3,2 0.97
2. Tomadas uso geral 6,6 0.90
3. Força motriz 18 0.86
a) Determine a corrente total na entrada deste quadro;
b) Determine as potências activa, reactiva e aparente totais.
4.9 No circuito da Fig. 4.P3 a impedância linear RL é percorrida por uma corrente não
sinusoidal com as harmónicas i1, i2 e i3. Calcule:
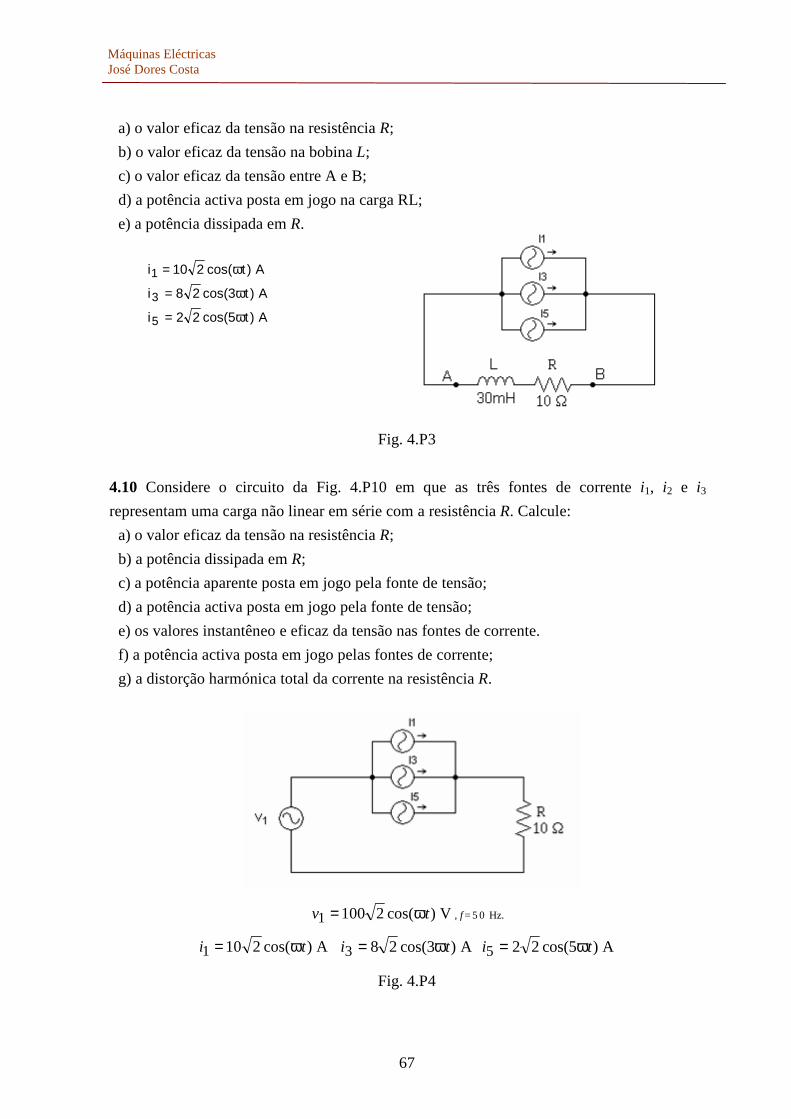
Máquinas Eléctricas José Dores Costa
67
a) o valor eficaz da tensão na resistência R;
b) o valor eficaz da tensão na bobina L;
c) o valor eficaz da tensão entre A e B;
d) a potência activa posta em jogo na carga RL;
e) a potência dissipada em R.
Ati )cos(2101 ω=
Ati )3cos(283 ω=
Ati )5cos(225 ω=
Fig. 4.P3
4.10 Considere o circuito da Fig. 4.P10 em que as três fontes de corrente i1, i2 e i3
representam uma carga não linear em série com a resistência R. Calcule:
a) o valor eficaz da tensão na resistência R;
b) a potência dissipada em R;
c) a potência aparente posta em jogo pela fonte de tensão;
d) a potência activa posta em jogo pela fonte de tensão;
e) os valores instantêneo e eficaz da tensão nas fontes de corrente.
f) a potência activa posta em jogo pelas fontes de corrente;
g) a distorção harmónica total da corrente na resistência R.
V)cos(21001 tv ω= , f = 5 0 Hz.
A)cos(2101 ti ω= A)3cos(283 ti ω= A)5cos(225 ti ω=
Fig. 4.P4

Máquinas Eléctricas José Dores Costa
68
CAPÍTULO 5.
CONVERSÃO ELECTROMECÂNICA DE ENERGIA 5.1 Campo magnético girante
No capítulo 2 referiu-se que o campo magnético é criado por correntes eléctricas e é
quantificado fisicamente pelas duas grandezas vectoriais: o campo de indução magnética, Br
, e o campo de excitação magnética, H
r. Refere-se seguidamente o campo magnético criado
por correntes sinusoidais.
Comecemos por considerar a Fig. 5.1 que representa uma espira de raio R percorrida por uma corrente eléctrica contínua com intensidade I.
Fig. 5.1: Campo magnético numa espira.
A lei de Biot-Savart estabelece que o campo de indução, Br
d , criado por um elemento de
corrente Lr
dI no ponto P sobre o eixo da espira é dado por
20 d
4d
rI
rLB
rrr ×
πµ
= (5.28)
As componentes de (5.1) segundo y, yBr
d , criadas por elementos de corrente diametralmente
opostos anulam-se e a componente segundo x é
r
R
r
dlIdBdBx ⋅
πµ
=α=2
0
4sen (5.29)
Integrando (5.2) para toda a espira, obtém-se o campo total segundo x no ponto P:
3234
200
r
RIdl
r
RIdBB
ll
xxµ
=π
µ== ∫∫ (5.30)

Máquinas Eléctricas José Dores Costa
69
O campo no centro da espira, ponto O, obtém-se de (5.3) tendo em conta que r =R:
IR
BO 20µ
= (5.31)
A equação (5.4) estabelece que o campo no centro da espira de raio R é proporcional à intensidade da corrente eléctrica que a percorre, tem a direcção perpendicular ao plano da espira e tem o sentido dado pela regra do saca-rolhas.
Para uma corrente alternada sinusoidal )cos()( tIti ω= , o campo magnético em O tem uma intensidade segundo x que é dada por
)cos(2
)( 0 tIR
tBO ωµ
= (5.32)
Considerem-se agora as duas espiras de igual raio situadas em planos perpendiculares que se representam na Fig. 5.2: a espira 1 é percorrida pela corrente )cos()(1 tIti ω= e a espira 2 é
percorrida pela corrente )(sen)2
cos()(2 tItIti ω=π−ω= , ou seja, i1 e i2 têm iguais
amplitudes, têm a mesma frequência mas estão desfasadas de 90º.
Fig. 5.2: Campo magnético em duas espiras perpendiculares.
As correntes em quadratura dão origem a dois campos de indução magnética perpendiculares aos planos das bobinas cujas intensidades, B1 e B2, admitindo que o meio é linear, são, respectivamente,
)(sen
)cos(
2
1
tBB
tBB
m
m
ω=ω=
(5.33)
Em cada instante, o campo resultante é 21 BBBrrr
+=r . Tendo em conta (5.4) e (5.6), a
intensidade do campo resultante é mr BB = ; a direcção e o sentido do campo resultante é tal
que o afixo do vector rBr
roda sobre uma circunferência de raio Bm. Trata-se então de um
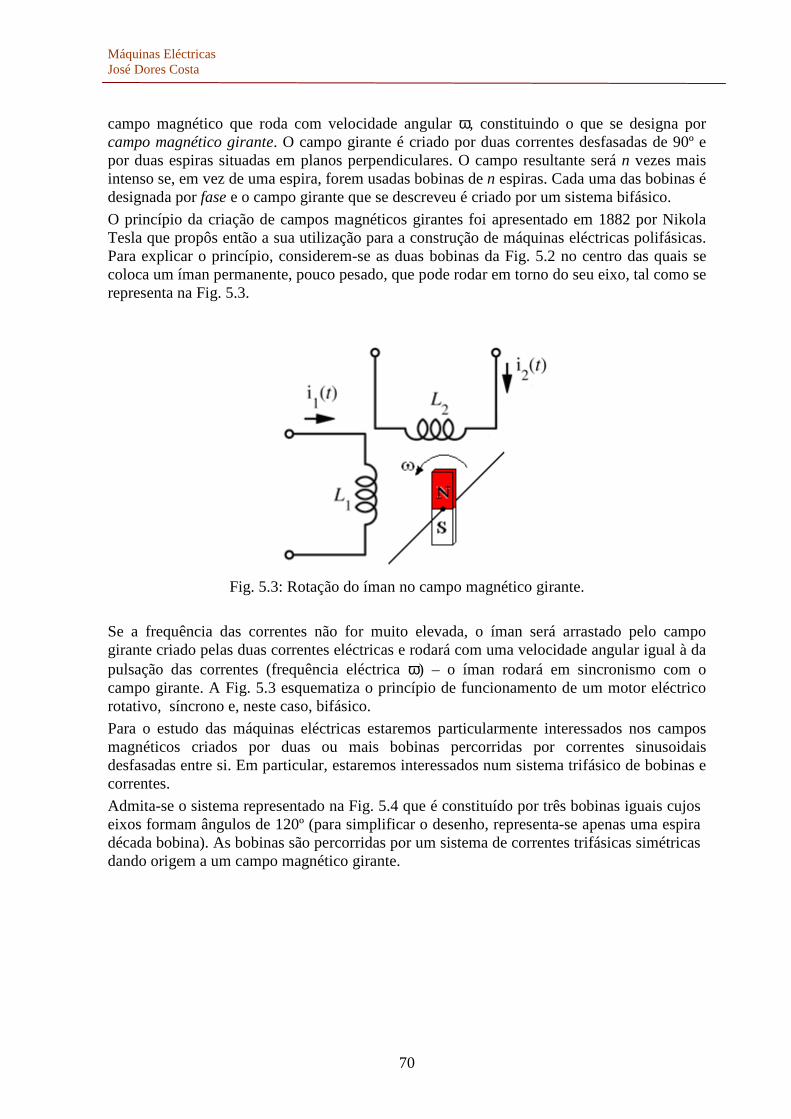
Máquinas Eléctricas José Dores Costa
70
campo magnético que roda com velocidade angular ω, constituindo o que se designa por campo magnético girante. O campo girante é criado por duas correntes desfasadas de 90º e por duas espiras situadas em planos perpendiculares. O campo resultante será n vezes mais intenso se, em vez de uma espira, forem usadas bobinas de n espiras. Cada uma das bobinas é designada por fase e o campo girante que se descreveu é criado por um sistema bifásico.
O princípio da criação de campos magnéticos girantes foi apresentado em 1882 por Nikola Tesla que propôs então a sua utilização para a construção de máquinas eléctricas polifásicas. Para explicar o princípio, considerem-se as duas bobinas da Fig. 5.2 no centro das quais se coloca um íman permanente, pouco pesado, que pode rodar em torno do seu eixo, tal como se representa na Fig. 5.3.
Fig. 5.3: Rotação do íman no campo magnético girante.
Se a frequência das correntes não for muito elevada, o íman será arrastado pelo campo girante criado pelas duas correntes eléctricas e rodará com uma velocidade angular igual à da pulsação das correntes (frequência eléctrica ω) – o íman rodará em sincronismo com o campo girante. A Fig. 5.3 esquematiza o princípio de funcionamento de um motor eléctrico rotativo, síncrono e, neste caso, bifásico.
Para o estudo das máquinas eléctricas estaremos particularmente interessados nos campos magnéticos criados por duas ou mais bobinas percorridas por correntes sinusoidais desfasadas entre si. Em particular, estaremos interessados num sistema trifásico de bobinas e correntes.
Admita-se o sistema representado na Fig. 5.4 que é constituído por três bobinas iguais cujos eixos formam ângulos de 120º (para simplificar o desenho, representa-se apenas uma espira década bobina). As bobinas são percorridas por um sistema de correntes trifásicas simétricas dando origem a um campo magnético girante.
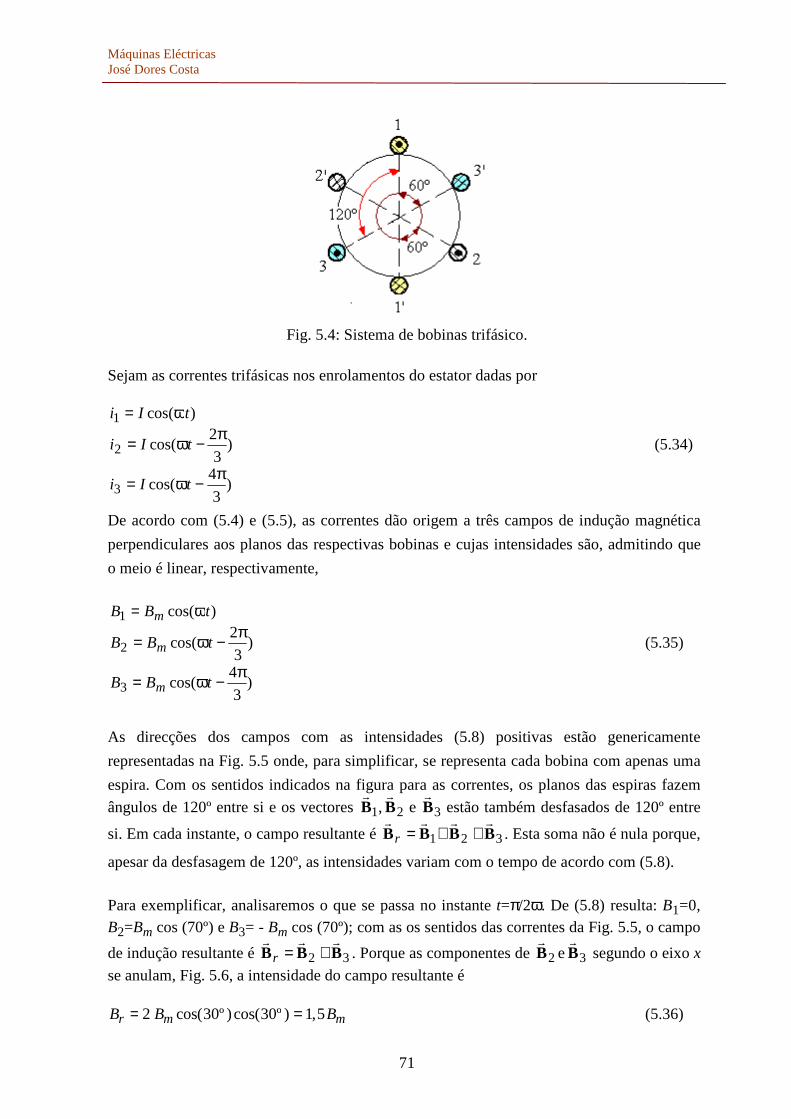
Máquinas Eléctricas José Dores Costa
71
Fig. 5.4: Sistema de bobinas trifásico.
Sejam as correntes trifásicas nos enrolamentos do estator dadas por
)3
4cos(
)3
2cos(
)cos(
3
2
1
π−ω=
π−ω=
ω=
tIi
tIi
tIi
(5.34)
De acordo com (5.4) e (5.5), as correntes dão origem a três campos de indução magnética
perpendiculares aos planos das respectivas bobinas e cujas intensidades são, admitindo que
o meio é linear, respectivamente,
)3
4cos(
)3
2cos(
)cos(
3
2
1
π−ω=
π−ω=
ω=
tBB
tBB
tBB
m
m
m
(5.35)
As direcções dos campos com as intensidades (5.8) positivas estão genericamente
representadas na Fig. 5.5 onde, para simplificar, se representa cada bobina com apenas uma
espira. Com os sentidos indicados na figura para as correntes, os planos das espiras fazem
ângulos de 120º entre si e os vectores 321 e, BBBrrr
estão também desfasados de 120º entre
si. Em cada instante, o campo resultante é 321 BBBBrrrr
++=r . Esta soma não é nula porque,
apesar da desfasagem de 120º, as intensidades variam com o tempo de acordo com (5.8).
Para exemplificar, analisaremos o que se passa no instante t=π/2ω. De (5.8) resulta: B1=0, B2=Bm cos (70º) e B3= - Bm cos (70º); com as os sentidos das correntes da Fig. 5.5, o campo
de indução resultante é 32 BBBrrr
+=r . Porque as componentes de 32 eBBrr
segundo o eixo x
se anulam, Fig. 5.6, a intensidade do campo resultante é
B B Br m m= =2 30 30 1 5cos( º)cos( º) , (5.36)
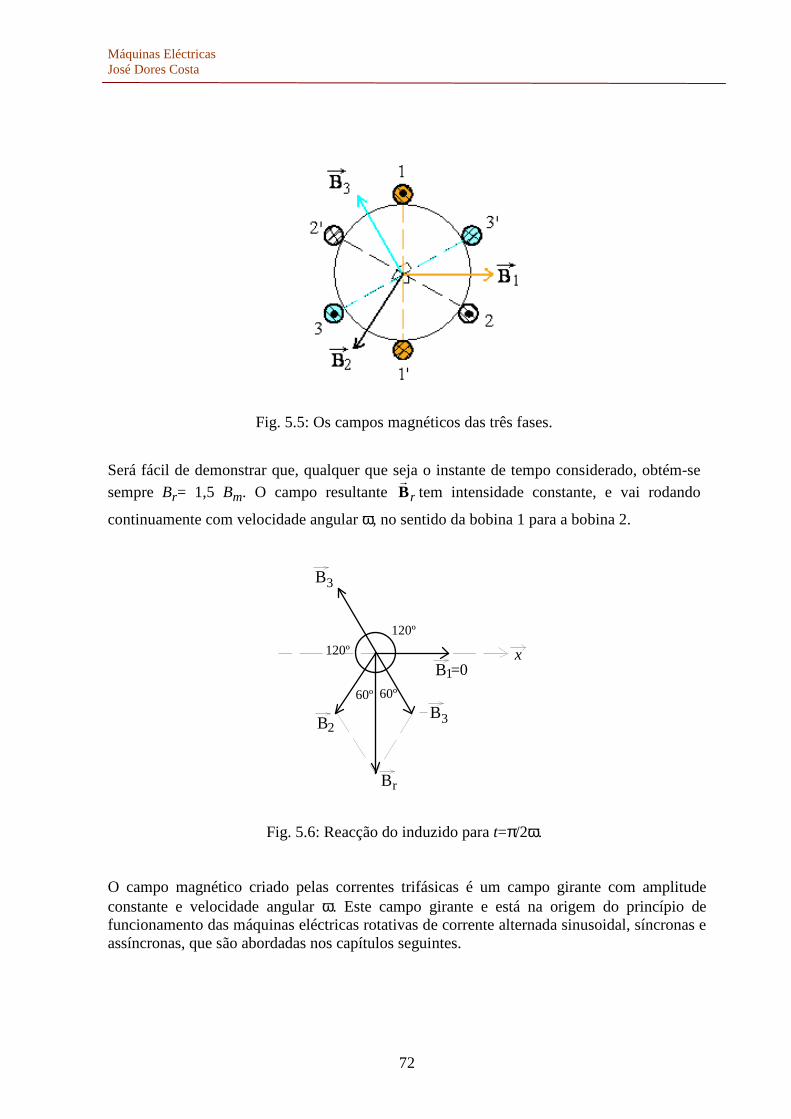
Máquinas Eléctricas José Dores Costa
72
Fig. 5.5: Os campos magnéticos das três fases.
Será fácil de demonstrar que, qualquer que seja o instante de tempo considerado, obtém-se sempre Br= 1,5 Bm. O campo resultante rB
rtem intensidade constante, e vai rodando
continuamente com velocidade angular ω, no sentido da bobina 1 para a bobina 2.
120º
B
1
2
3B
B120º
Br
3B60º60º
x=0
Fig. 5.6: Reacção do induzido para t=π/2ω. O campo magnético criado pelas correntes trifásicas é um campo girante com amplitude constante e velocidade angular ω. Este campo girante e está na origem do princípio de funcionamento das máquinas eléctricas rotativas de corrente alternada sinusoidal, síncronas e assíncronas, que são abordadas nos capítulos seguintes.
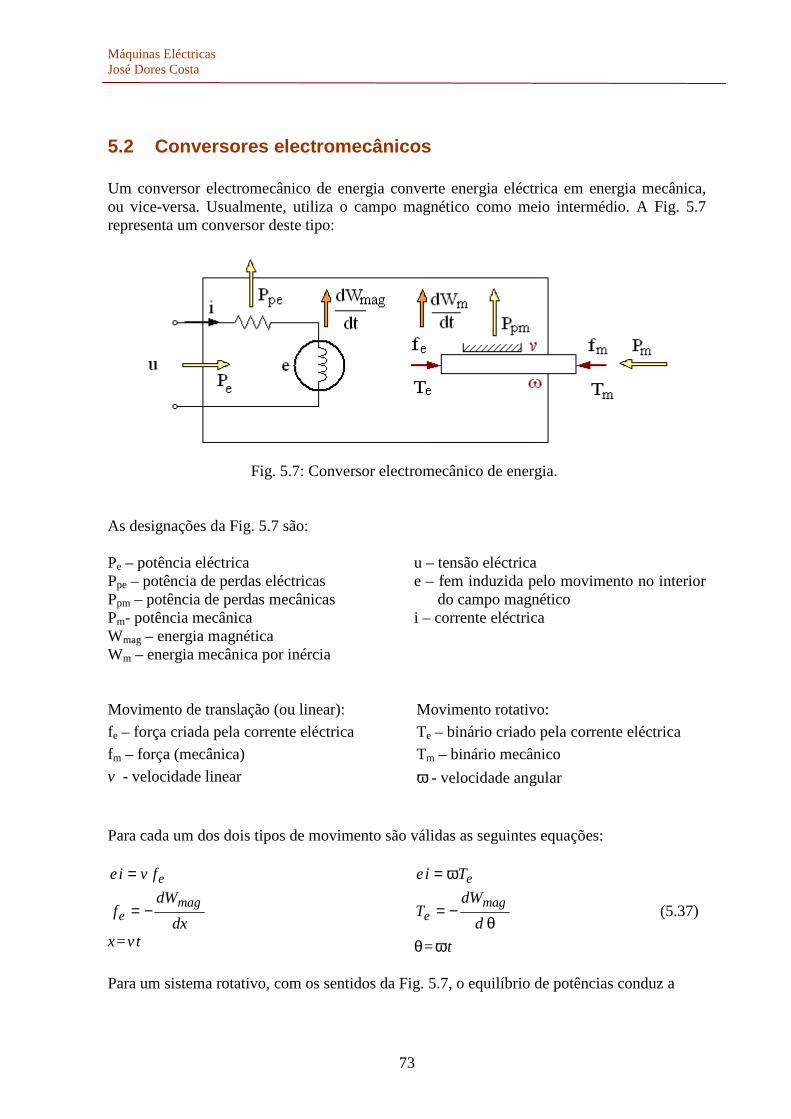
Máquinas Eléctricas José Dores Costa
73
5.2 Conversores electromecânicos Um conversor electromecânico de energia converte energia eléctrica em energia mecânica, ou vice-versa. Usualmente, utiliza o campo magnético como meio intermédio. A Fig. 5.7 representa um conversor deste tipo:
Fig. 5.7: Conversor electromecânico de energia.
As designações da Fig. 5.7 são: Pe – potência eléctrica Ppe – potência de perdas eléctricas Ppm – potência de perdas mecânicas Pm- potência mecânica Wmag – energia magnética Wm – energia mecânica por inércia
u – tensão eléctrica e – fem induzida pelo movimento no interior
do campo magnético i – corrente eléctrica
Movimento de translação (ou linear): Movimento rotativo:
fe – força criada pela corrente eléctrica
fm – força (mecânica)
v - velocidade linear
Te – binário criado pela corrente eléctrica
Tm – binário mecânico
ω - velocidade angular
Para cada um dos dois tipos de movimento são válidas as seguintes equações:
efvie =
dx
dWf
mage −=
x=vt
eTie ω=
θ−=
d
dWT
mage (5.37)
θ=ωt Para um sistema rotativo, com os sentidos da Fig. 5.7, o equilíbrio de potências conduz a
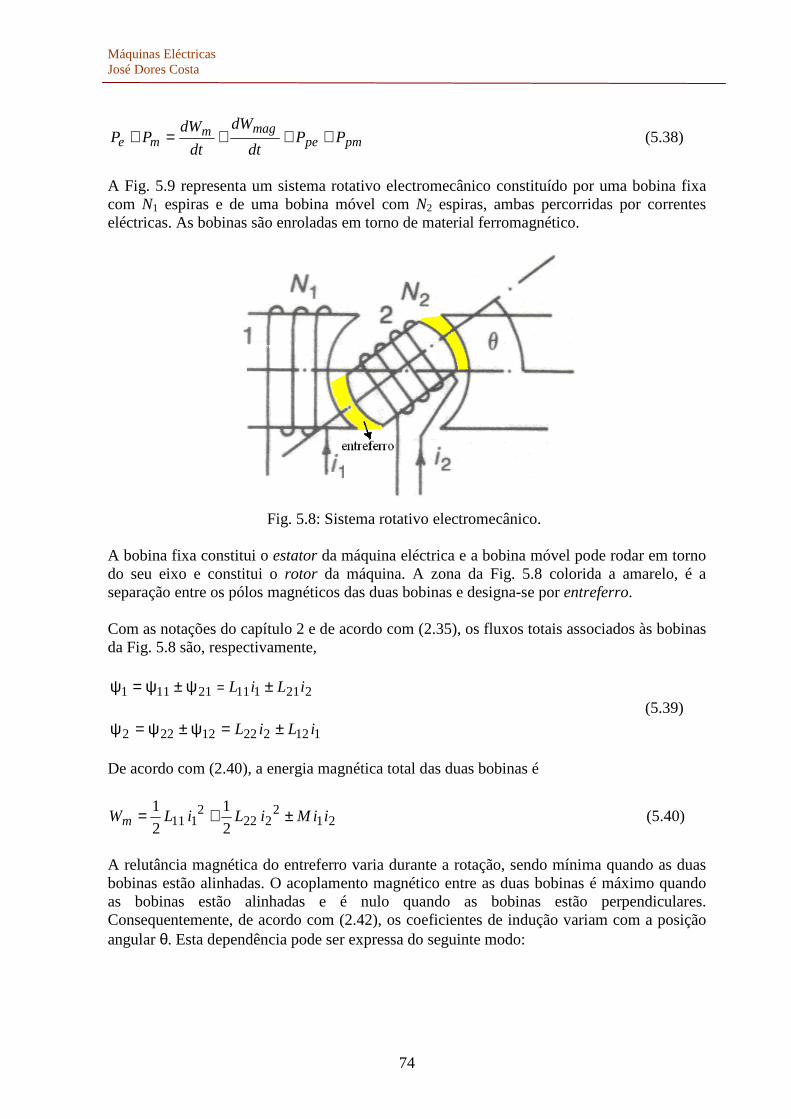
Máquinas Eléctricas José Dores Costa
74
pmpemagm
me PPdt
dW
dt
dWPP +++=+ (5.38)
A Fig. 5.9 representa um sistema rotativo electromecânico constituído por uma bobina fixa com N1 espiras e de uma bobina móvel com N2 espiras, ambas percorridas por correntes eléctricas. As bobinas são enroladas em torno de material ferromagnético.
Fig. 5.8: Sistema rotativo electromecânico.
A bobina fixa constitui o estator da máquina eléctrica e a bobina móvel pode rodar em torno do seu eixo e constitui o rotor da máquina. A zona da Fig. 5.8 colorida a amarelo, é a separação entre os pólos magnéticos das duas bobinas e designa-se por entreferro. Com as notações do capítulo 2 e de acordo com (2.35), os fluxos totais associados às bobinas da Fig. 5.8 são, respectivamente,
22111121111 iLiL ±ψ±ψ=ψ = (5.39)
11222212222 iLiL ±=ψ±ψ=ψ De acordo com (2.40), a energia magnética total das duas bobinas é
212
2222
111 2
1
2
1iiMiLiLWm ±+= (5.40)
A relutância magnética do entreferro varia durante a rotação, sendo mínima quando as duas bobinas estão alinhadas. O acoplamento magnético entre as duas bobinas é máximo quando as bobinas estão alinhadas e é nulo quando as bobinas estão perpendiculares. Consequentemente, de acordo com (2.42), os coeficientes de indução variam com a posição angular θ. Esta dependência pode ser expressa do seguinte modo:

Máquinas Eléctricas José Dores Costa
75
θ=θ+=
θ+=
cos
2cos
2cos
0
22022
11011
MM
LLL
LLL
(5.41)
De acordo com (5.14), os coeficientes de auto-indução variam periodicamente com θ e têm duas componentes: uma constante, que é o seu valor médio numa rotação, e outra oscilatória em função de cos(2θ). Porque o entreferro varia com a posição do rotor, o coeficiente de indução mútua, M, varia com cos(θ), é alternadamente positivo e negativo, e o seu valor médio numa rotação é nulo. Substituindo (5.13) em (5.10) obtém-se
- 212
2222
111
d
d
d
d
2
1
d
d
2
1ii
Mi
Li
LTe θ
+θ
+θ
= (5.42)
Tendo em conta (5.14), de (5.15) resulta:
)(sen2)2(sen)2(sen 212
222
11 θ+θ+θ= iiiLiLTe (5.43)
De acordo com (5.10) e (5.15), o binário electromagnético é criado à custa da variação da energia magnética armazenada nos campos magnéticos criados pelas duas bobinas. O binário depende das correntes eléctricas e da posição angular do rotor. (5.16) O binário actua no sentido de alinhar o rotor com o estator; se é positivo, θ aumenta; se é negativo, θ diminui. Num sistema mecânico rotativo, o binário mecânico que o actua é composto pelas três parcelas de (5.17), na qual J é o momento de inércia (a unidade no SI é kg.m²), B é o coeficiente de atrito e T(θ) é o binário de carga. O momento de inércia quantifica a distribuição da massa do corpo em torno do eixo de rotação e quanto maior for, tanto mais difícil será fazer girar o corpo em torno desse eixo.
)(d
d
d
d2
2θ+θ+θ= T
tB
tJTm (5.44)
A primeira parcela de (5.17) representa o binário acelerativo, a segunda o binário de atrito de rotação, e a última o binário resistente que pode depender de θ. Aplicando (5.17) ao sistema da Fig. 5. 7, e considerando um binário Tpm associado às perdas mecânicas, resulta
pmme Tt
Bt
JTT +θ+θ=+d
d
d
d2
2 (5.45)
Em termos mecânicos, a potência, o binário e a velocidade angular estão relacionados pela seguinte equação

Máquinas Eléctricas José Dores Costa
76
ω=θ= mmm Tt
TPd
d (5.46)
As equações (5.19), (5.18) e (5.16) permitem estudar a resposta dinâmica de θ(t) perante os binários actuantes Te e Tm. E porque (5.16) não é linear, normalmente recorre-se à linearização do modelo matemático em torno dum ponto de funcionamento.
5.3 Problemas 5.1 No sistema da Fig. 5.8 os coeficientes de indução são, em mH: L11= 5+cos(2θ), M=3cos(θ), e L22= 3+2cos(2θ). As correntes são I1=1 A e I2= 25 mA. Calcule o binário electromagnético Te entre as duas bobinas e desenhe o seu gráfico em função de θ. 5.2 Na Fig. 5.P2 representa-se um electroíman com dois entreferros com altura x. A relutância magnética do ferro é RFe= 11.105 H-1. O núcleo de ferro e a armadura têm uma secção recta uniforme S=100 mm2. Admite-se que o campo magnético no ferro é uniforme e que a corrente I é constante. Não existindo saturação, calcule:
a) a relutância magnética total do electroíman; b) o coeficiente de auto-indução da bobina; c) a intensidade do campo magnético (de indução)
no ferro e no ar.
17
0 Hm10.4 −−π=µ ; x =1 mm
N = 300 espiras; I = 2A
Fig. 5.P2
5.3 Considere o circuito da Fig. 5.P2. Obtenha a força exercida sobre a armadura admitindo que o fluxo se mantém constante. 5.4 A Fig. 5.P3 representa um motor de relutância. O rotor, que é de ferro e tem os sectores sombreados constituídos por material de alta permeabilidade magnética, roda à velocidade angular ωr. O enrolamento do estator é percorrido por uma corrente sinusoidal com pulsação ω e admite-se que ωr=ω.

Máquinas Eléctricas José Dores Costa
77
Fig. 5.P3
O binário que actua o rotor é dado por θ
=d
dWT m , sendo Wm a energia magnética no
enrolamento do estator. Obtenha:
a) a variação do coeficiente de auto-indução do estator com θ;
b) a expressão do binário T em função de θ;
c) o valor médio do binário T se )cos()( tIti ω= .

Máquinas Eléctricas José Dores Costa
78
CAPÍTULO 6. MÁQUINAS ASSÍNCRONAS
6.1 Introdução
No capítulo anterior referiu-se que o campo magnético girante está na base da construção de máquinas eléctricas polifásicas. Na Fig. 5.3 considerou-se que o rotor da máquina eléctrica era constituído por um íman permanente com pequena inércia capaz de rodar em sincronismo com o campo girante. Considere-se, tal como se representa na Fig. 6.1, que o íman é substituído por uma bobina em curto-circuito, e que as correntes i1 e i2 dão origem a um campo magnético girante.
Fig. 6.1: Bobina num campo magnético girante.
Considerando primeiramente que a bobina está fixa (parada), o campo girante dá origem a um fluxo variável através da secção definida pela bobina e a fem induzida por este fluxo variável dá origem a uma corrente induzida na bobina, ir. Esta corrente cria um campo magnético Br que interage com o campo magnético girante dando origem a um binário que tende a fazer rodar a bobina em torno do eixo ee’.
Se a bobina rodar em sincronismo com o campo girante, o fluxo criado pelo campo girante que a travessa é constante, a corrente ir anula-se, deixa de existir o binário actuante e a bobina tende a parar. Mas ao reduzir a velocidade, o fluxo através da bobina deixa de ser constante e reaparece um binário actuante não nulo. Percebe-se assim que a bobina só se mantém em rotação se rodar com uma velocidade que é inferior à do campo girante criado pelas correntes i1 e i2.
O campo magnético no rotor na máquina eléctrica da Fig. 7.1 é induzido pelo campo magnético (girante) criado pelas correntes do estator (bobinas L1 e L2) e a máquina designa-se por máquina eléctrica de indução ou máquina assíncrona porque o rotor não roda em sincronismo com o campo girante das correntes do estator.
A velocidade de rotação do campo girante criado pelas correntes do estator é função da frequência das correntes e do número de pólos do estator (é uma característica construtiva da máquina e depende do modo como este foi bobinado). A frequência, f, o número de pares de

Máquinas Eléctricas José Dores Costa
79
pólos, p, e a velocidade síncrona, ns, em rotações por segundo (rps), estão relacionadas pela seguinte equação: f=pns (6.1) Com o rotor parado, Fig. 6.1, a frequência das correntes na bobina do rotor é igual à frequência das correntes do estator. À medida que o rotor acelera, a frequência das correntes do rotor diminui e quando atinge a velocidade estacionária ela é de apenas uma pequena fracção da frequência do estator. O rotor de um motor assíncrono roda com uma velocidade inferior a ns que é designada por velocidade síncrona ou velocidade de sincronismo. A diferença entre a velocidade de sincronismo e a velocidade do rotor chama-se escorregamento. Normalmente, o escorregamento, s, é expresso em % da velocidade de sincronismo:
100s
ms
n
nns
−= (%) (6.2)
em que ns é a velocidade síncrona e nm a velocidade mecânica de rotação do rotor. A máquina a assíncrona (ou de indução) é a máquina eléctrica mais utilizada industrialmente, funcionando sobretudo como motor, porque é uma máquina robusta, tem baixo custo e pouca manutenção, podendo ainda ser utilizada em ambientes perigosos (poeirentos, com riscos de explosão e expostas à intempérie, por exemplo). A máquina a assíncrona pode ser também utilizada como gerador, embora com menor rendimento, mas com a vantagem de ser facilmente interligada com a rede eléctrica. O gerador assíncrono é muito utilizado na produção de energia eléctrica a partir de recursos renováveis, como sejam os sistemas eólicos, mini hídricos, energia das ondas, e os que utilizam o biogás como combustível.
O rotor de um motor de indução roda com uma velocidade um pouco inferior à velocidade síncrona (tipicamente entre 3% e 10%), e a velocidade depende da carga mecânica acoplada ao veio. Quando funciona como gerador, a velocidade do rotor é superior à velocidade síncrona e então o escorregamento é negativo.
Mais recentemente, a utilização das máquinas assíncronas alargou-se com a utilização de conversores electrónicos que permitem controlar a velocidade e o binário através da variação da tensão e da frequência aplicadas ao estator, e também ao rotor da máquina.
As máquinas assíncronas utilizadas na indústria são geralmente trifásicas, mas podem ser também monofásicas, sobretudo as de pequena potência, e todas se caracterizam pela existência do escorregamento referido em (6.2).
6.2 Constituição das máquinas assíncronas
A Fig. 6.2 apresenta a constituição de máquinas assíncronas. A carcaça da máquina assíncrona é, em geral, feita de ferro fundido sendo dotada de aletas que melhoram a dissipação de calor. O estator, colocado no interior da carcaça, é formado por um núcleo de chapas magnéticas que possui ranhuras axiais para alojar as bobinas do estator que podem se monofásicos ou polifásicos (trifásicos, mais usualmente). O rotor é igualmente composto de um núcleo de chapas magnéticas, dotadas de ranhuras axiais onde o enrolamento do rotor é alojado, fixas a um veio de aço que roda no interior de rolamentos fixos às tampas.
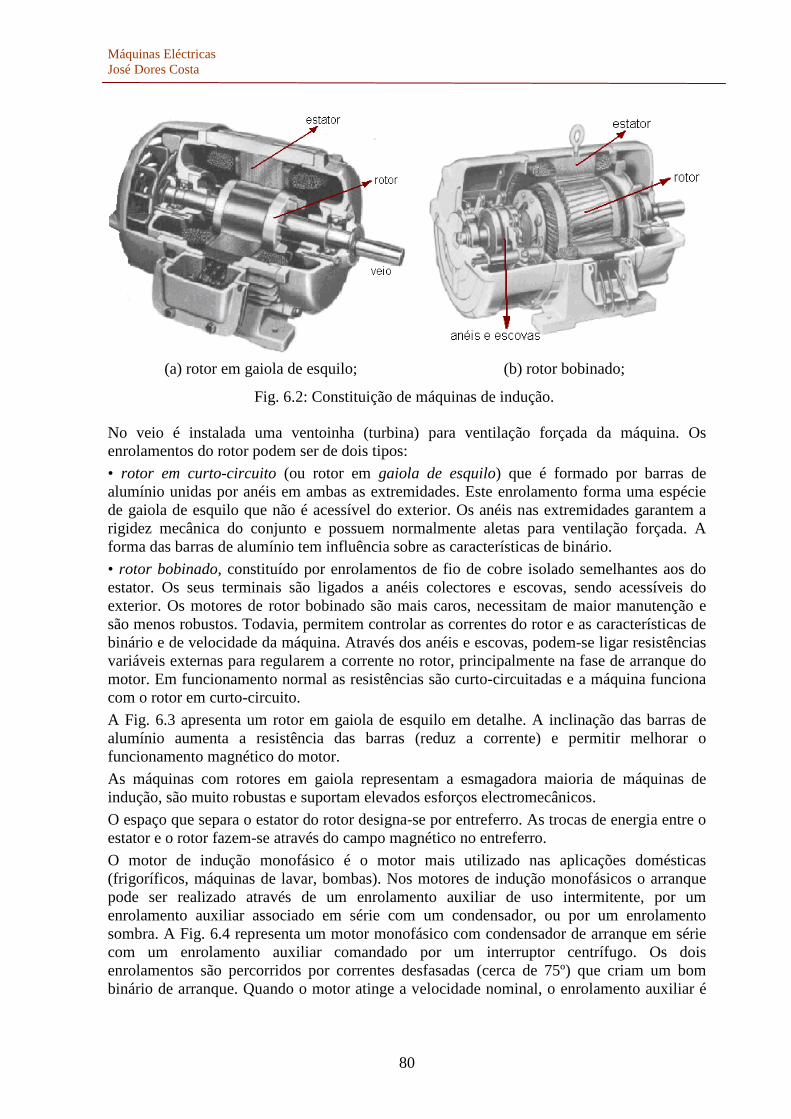
Máquinas Eléctricas José Dores Costa
80
(a) rotor em gaiola de esquilo; (b) rotor bobinado;
Fig. 6.2: Constituição de máquinas de indução. No veio é instalada uma ventoinha (turbina) para ventilação forçada da máquina. Os enrolamentos do rotor podem ser de dois tipos:
• rotor em curto-circuito (ou rotor em gaiola de esquilo) que é formado por barras de alumínio unidas por anéis em ambas as extremidades. Este enrolamento forma uma espécie de gaiola de esquilo que não é acessível do exterior. Os anéis nas extremidades garantem a rigidez mecânica do conjunto e possuem normalmente aletas para ventilação forçada. A forma das barras de alumínio tem influência sobre as características de binário.
• rotor bobinado, constituído por enrolamentos de fio de cobre isolado semelhantes aos do estator. Os seus terminais são ligados a anéis colectores e escovas, sendo acessíveis do exterior. Os motores de rotor bobinado são mais caros, necessitam de maior manutenção e são menos robustos. Todavia, permitem controlar as correntes do rotor e as características de binário e de velocidade da máquina. Através dos anéis e escovas, podem-se ligar resistências variáveis externas para regularem a corrente no rotor, principalmente na fase de arranque do motor. Em funcionamento normal as resistências são curto-circuitadas e a máquina funciona com o rotor em curto-circuito.
A Fig. 6.3 apresenta um rotor em gaiola de esquilo em detalhe. A inclinação das barras de alumínio aumenta a resistência das barras (reduz a corrente) e permitir melhorar o funcionamento magnético do motor.
As máquinas com rotores em gaiola representam a esmagadora maioria de máquinas de indução, são muito robustas e suportam elevados esforços electromecânicos.
O espaço que separa o estator do rotor designa-se por entreferro. As trocas de energia entre o estator e o rotor fazem-se através do campo magnético no entreferro.
O motor de indução monofásico é o motor mais utilizado nas aplicações domésticas (frigoríficos, máquinas de lavar, bombas). Nos motores de indução monofásicos o arranque pode ser realizado através de um enrolamento auxiliar de uso intermitente, por um enrolamento auxiliar associado em série com um condensador, ou por um enrolamento sombra. A Fig. 6.4 representa um motor monofásico com condensador de arranque em série com um enrolamento auxiliar comandado por um interruptor centrífugo. Os dois enrolamentos são percorridos por correntes desfasadas (cerca de 75º) que criam um bom binário de arranque. Quando o motor atinge a velocidade nominal, o enrolamento auxiliar é
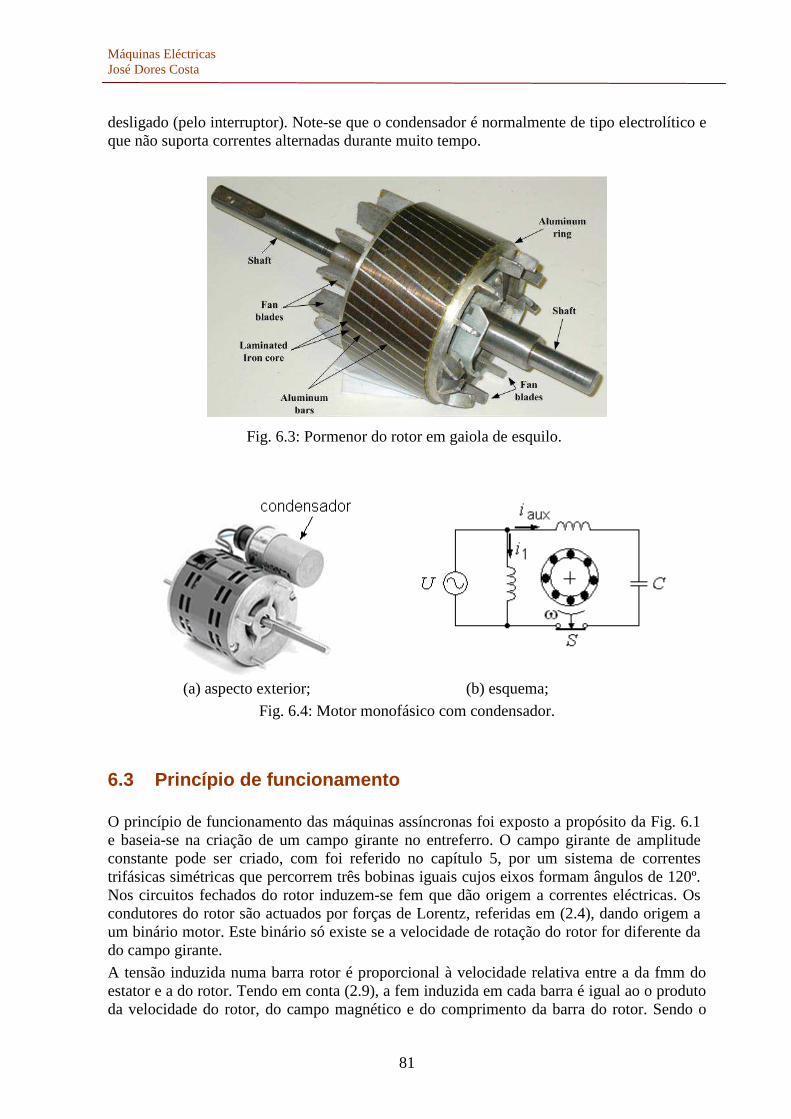
Máquinas Eléctricas José Dores Costa
81
desligado (pelo interruptor). Note-se que o condensador é normalmente de tipo electrolítico e que não suporta correntes alternadas durante muito tempo.
Fig. 6.3: Pormenor do rotor em gaiola de esquilo.
(a) aspecto exterior; (b) esquema;
Fig. 6.4: Motor monofásico com condensador.
6.3 Princípio de funcionamento O princípio de funcionamento das máquinas assíncronas foi exposto a propósito da Fig. 6.1 e baseia-se na criação de um campo girante no entreferro. O campo girante de amplitude constante pode ser criado, com foi referido no capítulo 5, por um sistema de correntes trifásicas simétricas que percorrem três bobinas iguais cujos eixos formam ângulos de 120º. Nos circuitos fechados do rotor induzem-se fem que dão origem a correntes eléctricas. Os condutores do rotor são actuados por forças de Lorentz, referidas em (2.4), dando origem a um binário motor. Este binário só existe se a velocidade de rotação do rotor for diferente da do campo girante.
A tensão induzida numa barra rotor é proporcional à velocidade relativa entre a da fmm do estator e a do rotor. Tendo em conta (2.9), a fem induzida em cada barra é igual ao o produto da velocidade do rotor, do campo magnético e do comprimento da barra do rotor. Sendo o
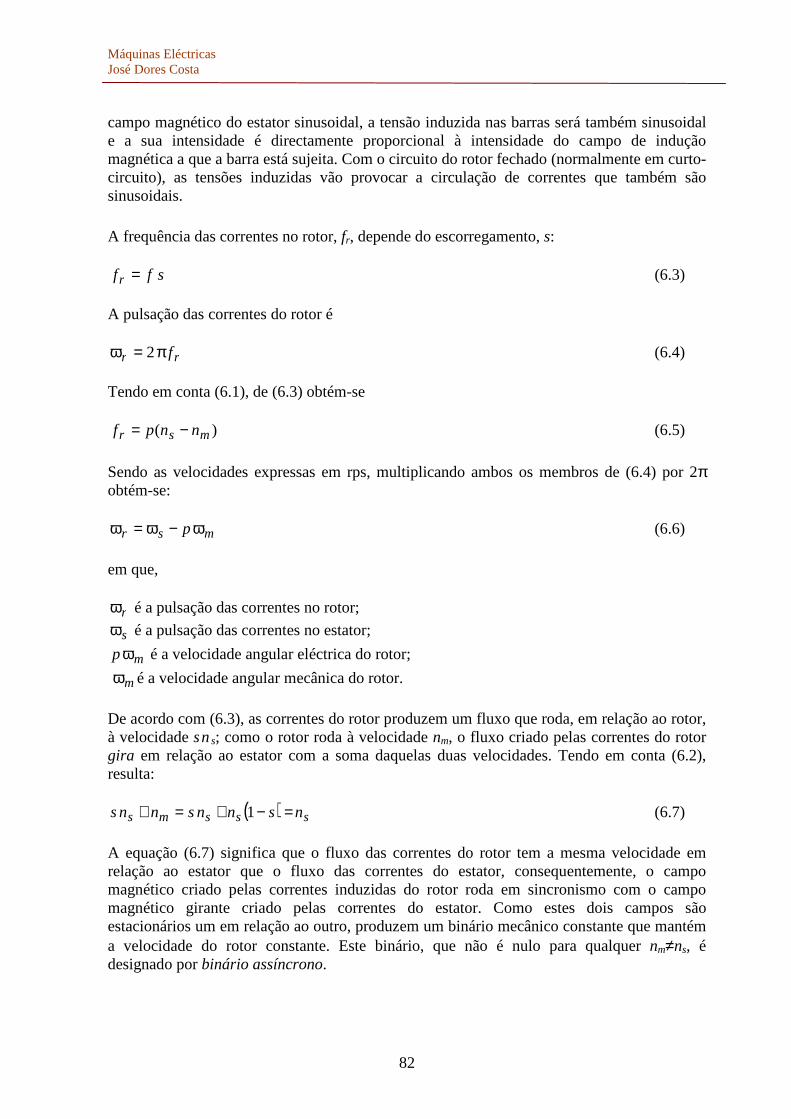
Máquinas Eléctricas José Dores Costa
82
campo magnético do estator sinusoidal, a tensão induzida nas barras será também sinusoidal e a sua intensidade é directamente proporcional à intensidade do campo de indução magnética a que a barra está sujeita. Com o circuito do rotor fechado (normalmente em curto-circuito), as tensões induzidas vão provocar a circulação de correntes que também são sinusoidais.
A frequência das correntes no rotor, fr, depende do escorregamento, s:
sff r = (6.3) A pulsação das correntes do rotor é
rr fπ=ω 2 (6.4) Tendo em conta (6.1), de (6.3) obtém-se
)( msr nnpf −= (6.5)
Sendo as velocidades expressas em rps, multiplicando ambos os membros de (6.4) por 2π obtém-se:
msr pω−ω=ω (6.6)
em que,
rω é a pulsação das correntes no rotor;
sω é a pulsação das correntes no estator;
mpω é a velocidade angular eléctrica do rotor;
mω é a velocidade angular mecânica do rotor.
De acordo com (6.3), as correntes do rotor produzem um fluxo que roda, em relação ao rotor, à velocidade sns; como o rotor roda à velocidade nm, o fluxo criado pelas correntes do rotor gira em relação ao estator com a soma daquelas duas velocidades. Tendo em conta (6.2), resulta:
( ) sssms nsnnsnns =−+=+ 1 (6.7)
A equação (6.7) significa que o fluxo das correntes do rotor tem a mesma velocidade em relação ao estator que o fluxo das correntes do estator, consequentemente, o campo magnético criado pelas correntes induzidas do rotor roda em sincronismo com o campo magnético girante criado pelas correntes do estator. Como estes dois campos são estacionários um em relação ao outro, produzem um binário mecânico constante que mantém a velocidade do rotor constante. Este binário, que não é nulo para qualquer nm≠ns, é designado por binário assíncrono.
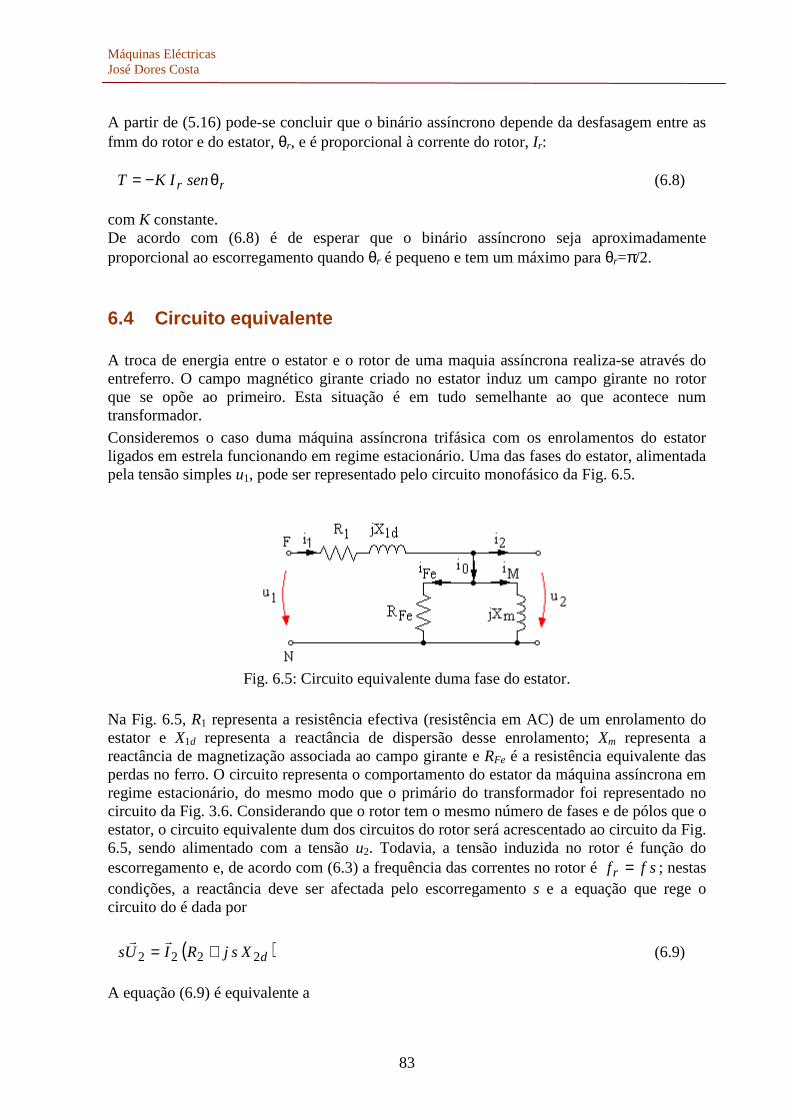
Máquinas Eléctricas José Dores Costa
83
A partir de (5.16) pode-se concluir que o binário assíncrono depende da desfasagem entre as fmm do rotor e do estator, θr, e é proporcional à corrente do rotor, Ir: rr senIKT θ−= (6.8) com K constante. De acordo com (6.8) é de esperar que o binário assíncrono seja aproximadamente proporcional ao escorregamento quando θr é pequeno e tem um máximo para θr=π/2.
6.4 Circuito equivalente A troca de energia entre o estator e o rotor de uma maquia assíncrona realiza-se através do entreferro. O campo magnético girante criado no estator induz um campo girante no rotor que se opõe ao primeiro. Esta situação é em tudo semelhante ao que acontece num transformador.
Consideremos o caso duma máquina assíncrona trifásica com os enrolamentos do estator ligados em estrela funcionando em regime estacionário. Uma das fases do estator, alimentada pela tensão simples u1, pode ser representado pelo circuito monofásico da Fig. 6.5.
Fig. 6.5: Circuito equivalente duma fase do estator.
Na Fig. 6.5, R1 representa a resistência efectiva (resistência em AC) de um enrolamento do estator e X1d representa a reactância de dispersão desse enrolamento; Xm representa a reactância de magnetização associada ao campo girante e RFe é a resistência equivalente das perdas no ferro. O circuito representa o comportamento do estator da máquina assíncrona em regime estacionário, do mesmo modo que o primário do transformador foi representado no circuito da Fig. 3.6. Considerando que o rotor tem o mesmo número de fases e de pólos que o estator, o circuito equivalente dum dos circuitos do rotor será acrescentado ao circuito da Fig. 6.5, sendo alimentado com a tensão u2. Todavia, a tensão induzida no rotor é função do escorregamento e, de acordo com (6.3) a frequência das correntes no rotor é sff r = ; nestas condições, a reactância deve ser afectada pelo escorregamento s e a equação que rege o circuito do é dada por
( )dXsjRIUs 2222 +=rr
(6.9)
A equação (6.9) é equivalente a

Máquinas Eléctricas José Dores Costa
84
+= dXjs
RIU 2
222rr
(6.10)
De acordo com (6.10), a impedância do rotor vista pela tensão u2 é
dXjs
RZ 2
22 += (6.11)
em que R2 representa a resistência efectiva de um enrolamento do rotor e X2d representa a reactância de dispersão desse enrolamento. A impedância (6.11) pode ser escrita na seguinte forma:
dXjs
sRRZ 2222
1 +−+= (6.12)
Com base em (6.12), o circuito equivalente de uma das fases da máquina assíncrona em regime estacionário (velocidade constante) é o da Fig. 6.6:
Fig. 6.6: Circuito equivalente/fase da máquina assíncrona.
Numa máquina com n fases, o circuito da Fig. 6.6 lida com uma potência que é 1/n da potência total da máquina. A resistência de carga, ( ) ssR /12 − , varia com o escorregamento e a potência nela dissipada é igual a 1/n da potência mecânica total da máquina, Pm:
s
sRInPm
−= 12
22 (6.13)
O circuito da Fig. 6.6 é equivalente no sentido em que traduz o trânsito de potência através da máquina assíncrona. O trânsito de potência está representado na Fig.6.7 em relação às partes constituintes da máquina e na Fig. 6.8 em relação aos componentes do circuito eléctrico equivalente,para comparação.
Na Fig. 6.7, a potência mecânica total da máquina, Pm, é composta por duas parcelas: a potência útil no veio, PL, mais a potência de perdas por atrito e ventilação, Pv. O circuito eléctrico equivalente traduz o trânsito de potências na máquina em regime estacionário e a potência mecânica é igual à potência dissipada numa resistência que varia com a velocidade, sendo função do escorregamento estacionário s.
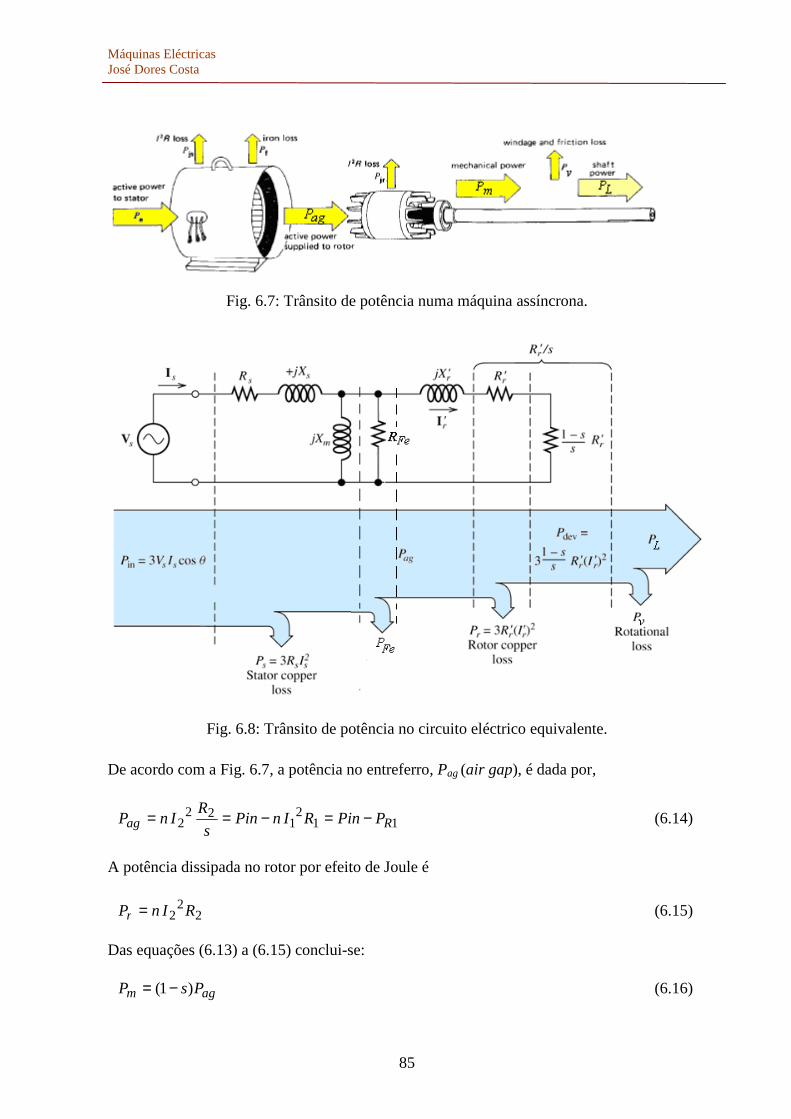
Máquinas Eléctricas José Dores Costa
85
Fig. 6.7: Trânsito de potência numa máquina assíncrona.
Fig. 6.8: Trânsito de potência no circuito eléctrico equivalente.
De acordo com a Fig. 6.7, a potência no entreferro, Pag (air gap), é dada por,
112
122
2 Rag PPinRInPins
RInP −=−== (6.14)
A potência dissipada no rotor por efeito de Joule é
22
2 RInPr = (6.15) Das equações (6.13) a (6.15) conclui-se: agm PsP )1( −= (6.16)

Máquinas Eléctricas José Dores Costa
86
agr PsP = (6.17)
rm Ps
sP
−= 1 (6.18)
Das equações (6.16) a (6.18) conclui-se que uma máquina assíncrona funcionando com um escorregamento elevado é muito ineficiente. Refira-se que a potência útil no veio é vagu PPsP −−= )1( (6.19)
O rendimento da máquina assíncrona funcionando como motor é
vrRFeu
u
in
u
PPPPP
P
P
P
++++==η
1 (6.20)
Exemplo 6.1 --------------------------------------- -----------------------------------------------------------------Um motor de indução trifásico com rotor em gaiola tem 2 pares de pólos e o estator é ligado em estrela para ser alimentado à tensão composta de 400V, 50 Hz. O circuito eléctrico equivalente em regime nominal, com os valores referidos ao estator, é o da Fig. 6.9:
R1 = 2,2 Ω;
X1 = 4,2 Ω;
Xm = 71 Ω
R’2 = 1,9 Ω;
X’2 = 4,2 Ω
Fig. 6.9: Circuito eléctrico do exemplo 6.1.
As perdas totais por ventilação e atrito são 450 W, que se admitem constantes, e as perdas no ferro são desprezáveis. Nas condições nominais de funcionamento o escorregamento é 3,0 %. Para o regime nominal, calcule:
a) o factor de potência do motor;
b) a potência no entreferro;
c) o binário mecânico no veio;
d) o rendimento do motor.
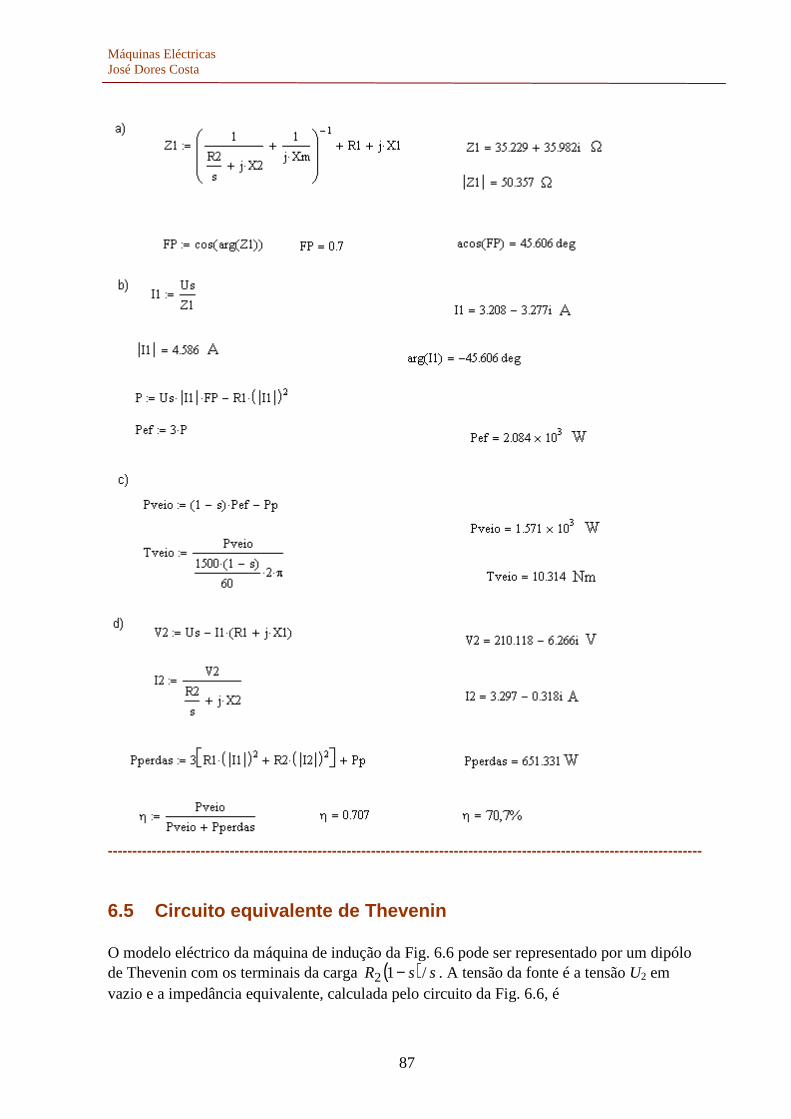
Máquinas Eléctricas José Dores Costa
87
--------------------------------------------------------------------------------------------------------------------------
6.5 Circuito equivalente de Thevenin O modelo eléctrico da máquina de indução da Fig. 6.6 pode ser representado por um dipólo de Thevenin com os terminais da carga ( ) ssR /12 − . A tensão da fonte é a tensão U2 em vazio e a impedância equivalente, calculada pelo circuito da Fig. 6.6, é

Máquinas Eléctricas José Dores Costa
88
(6.21)
O dipólo de Thevenin está representado na Fig. 6.10:
Fig. 6.10: dipólo equivalente de Thevenin.
A corrente no rotor, I2, é dada por
dx jXs
RZ
UI
22
202
++=
r
rr
(6.22)
Tendo em conta (5.19), o binário mecânico no veio duma máquina de n fases é dado por
ss
ag
m
mm s
RIn
PPT
ω=
ω=
ω= 2
22 (6.23)
Com xxx jXRZ += e substituindo (6.22) em (6.23), resulta
( )22
22
22
20
dxxs
m
XXs
RR
RU
s
nT
++
+ω
= (6.24)
Porque U20 depende apenas de U1 e de Zx, sendo constante o valor eficaz da tensão de alimentação, o binário mecânico é função do escorregamento. A Fig. 6.11 representa graficamente a função Tm(s). Quando o escorregamento é negativo, ωm>ωs, o binário (6.24) é negativo e a máquina funciona como gerador. Para pequenos valores de s, Tm é aproximadamente proporcional ao escorregamento. A máquina tem um funcionamento estável no intervalo [Tmax, -Tmax].
O valor Tmax é o valor máximo do binário electromagnético. Do circuito (6.10), pelo teorema da máxima potência transferida, a potência na carga é máxima, Pmax, quando
( )222
max
2dxx XXR
s
R++= (6.25)
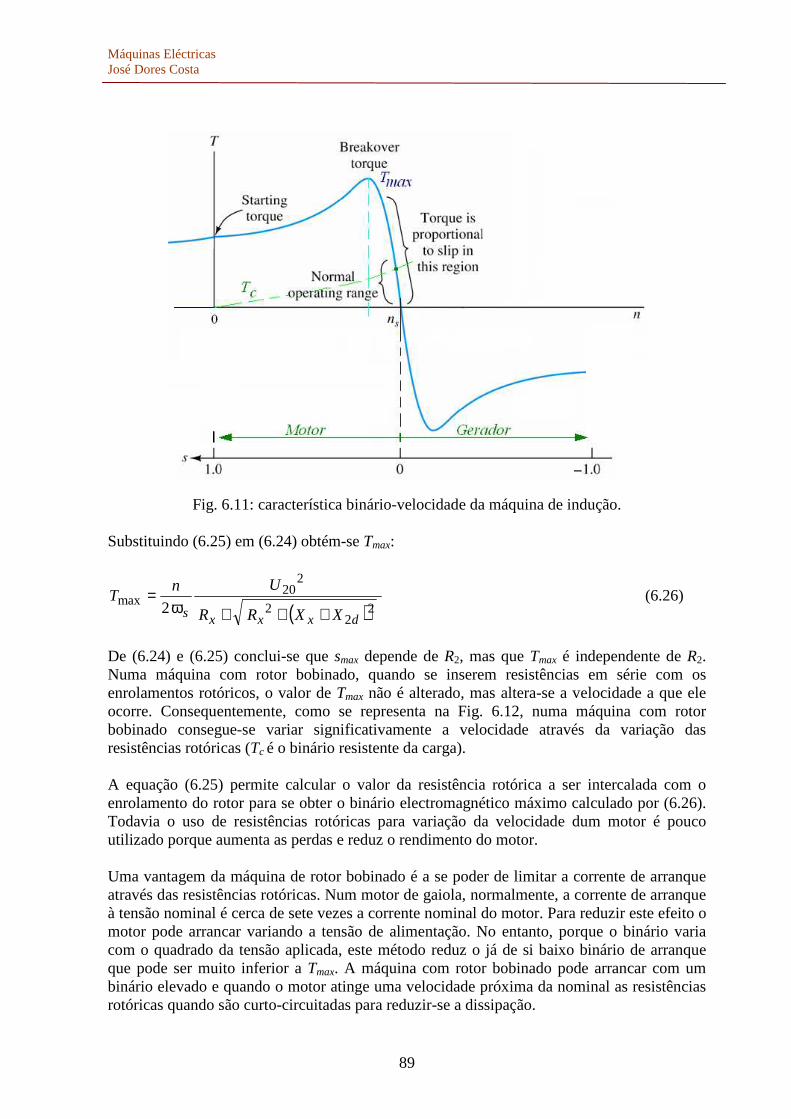
Máquinas Eléctricas José Dores Costa
89
Fig. 6.11: característica binário-velocidade da máquina de indução. Substituindo (6.25) em (6.24) obtém-se Tmax:
( )222
220
max 2dxxxs XXRR
UnT
+++ω= (6.26)
De (6.24) e (6.25) conclui-se que smax depende de R2, mas que Tmax é independente de R2. Numa máquina com rotor bobinado, quando se inserem resistências em série com os enrolamentos rotóricos, o valor de Tmax não é alterado, mas altera-se a velocidade a que ele ocorre. Consequentemente, como se representa na Fig. 6.12, numa máquina com rotor bobinado consegue-se variar significativamente a velocidade através da variação das resistências rotóricas (Tc é o binário resistente da carga). A equação (6.25) permite calcular o valor da resistência rotórica a ser intercalada com o enrolamento do rotor para se obter o binário electromagnético máximo calculado por (6.26). Todavia o uso de resistências rotóricas para variação da velocidade dum motor é pouco utilizado porque aumenta as perdas e reduz o rendimento do motor. Uma vantagem da máquina de rotor bobinado é a se poder de limitar a corrente de arranque através das resistências rotóricas. Num motor de gaiola, normalmente, a corrente de arranque à tensão nominal é cerca de sete vezes a corrente nominal do motor. Para reduzir este efeito o motor pode arrancar variando a tensão de alimentação. No entanto, porque o binário varia com o quadrado da tensão aplicada, este método reduz o já de si baixo binário de arranque que pode ser muito inferior a Tmax. A máquina com rotor bobinado pode arrancar com um binário elevado e quando o motor atinge uma velocidade próxima da nominal as resistências rotóricas quando são curto-circuitadas para reduzir-se a dissipação.

Máquinas Eléctricas José Dores Costa
90
Fig. 6.12: variação da característica de binário com a resistência rotórica. Exemplo 6.2 --------------------------------------- ----------------------------------------------------------------- Uma máquina de indução com rotor bobinado, trifásica, de 3 pares de pólos, ligada em estrela, tem as seguintes constantes por fase referidas ao estator: R1 = 1,2 Ω X1 = 4,1Ω Xm = 53 Ω R2 = 1,3 Ω X2 = 4,2 Ω Us = 240 V f= 50Hz. As perdas totais por ventilação e atrito são 525 W, que se admitem constantes, e desprezam-se as perdas no ferro. A máquina funciona como motor com o escorregamento nominal de 3,2 %. Nas condições nominais de tensão e frequência e com o rotor em curto-circuito, calcule (a) a resistência rotórica por fase para que o binário no arranque seja máximo; (b) a velocidade de rotação nominal. a)

Máquinas Eléctricas José Dores Costa
91
b) Com 3 pares de pólos, a velocidade de sincronismo em rpm é
--------------------------------------------------------------------------------------------------------------------------
6.6 Ensaios em vazio e com rotor bloqueado Os parâmetros do circuito da Fig. 6.6 podem ser determinados experimentalmente através dos ensaios em vazio e com o rotor bloqueado (curto-circuito) conduzidos de modo semelhante ao que foi feito para o transformador.
a) Ensaio em vazio (s≈0)
Com este ensaio pretende-se determinar: a resistência equivalente às perdas no ferro e reactância de magnetização. O motor roda em vazio (s≈0) alimentado à tensão nominal. Porque a corrente no estator é pequena, as perdas no cobre são desprezáveis, e a potência em vazio equilibra praticamente as perdas do ferro. Estas perdas variam com a tensão de entrada, mas permanecem praticamente constantes com a tensão constante.
O processo de cálculo é o mesmo do referido no parágrafo 3.5 para o transformador.
b) Ensaio com o rotor bloqueado (curto-circuito, s=1)
Este ensaio é semelhante ao ensaio de curto-circuito do transformador porque com o rotor bloqueado o escorregamento é s=1 e a resistência de carga do circuito equivalente da Fig. 6.6 é zero. Deste modo, com o veio do motor bloqueado, o motor tem que ser alimentado com uma tensão reduzida. Pode-se usar um auto-transformador (trifásico), cuja tensão é aumentada progressivamente, a partir de zero, até que a corrente nos enrolamentos do estator atinja o valor nominal, I1=I N. Nesta situação, registam rapidamente os valores das grandezas à entrada tais como o valor eficaz da tensão, o valor eficaz da corrente, a potência activa e o factor de potência.
O processo de cálculo é o mesmo do referido no parágrafo 3.5 para o ensaio do transformador em curto-circuito.
6.7 Arranque e variação da velocidade O arranque e a variação da velocidade dos motores de indução com o rotor em curto-circuito pode ser feita a partir da variação da amplitude da tensão de alimentação, da frequência da tensão de alimentação, ou ambos os casos, ou por comutação dos pólos.

Máquinas Eléctricas José Dores Costa
92
Alguns dos métodos mais usuais são:
• Variação do número de pólos (do estator): neste método, os enrolamentos do estator são projectados para que, alterando as ligações, se possa alterar o número de pólos. Normalmente a relação do número de pólos é 2:1 ou 4:1.
• Variação da frequência: a velocidade de sincronismo é proporcional à frequência da tensão de alimentação. Com a utilização de conversores electrónicos é possível variar a amplitude da tensão e a sua frequência.
• Variação da tensão de alimentação: a variação da tensão de alimentação poderá ser feita por um auto-transformador ou por um conversor electrónico de potência. Como o binário mecânico é proporcional ao quadrado da tensão aplicada, ao variar-se o valor eficaz da tensão varia-se o binário mecânico útil.
• Resistências rotóricas: como se referiu, o arranque de um motor com rotor bobinado por ser realizado através da variação sequencial das resistências rotóricas.
Os modernos arrancadores electrónicos são programáveis e permitem o ajuste simultâneo da amplitude da tensão e da frequência de forma a manter o binário de arranque num intervalo previamente definido.
Em termos convencionais, ainda se utiliza frequentemente a comutação estrela-triângulo para arrancar os motores de rotor em gaiola. O esquema utilizado está representado na Fig. 6.13.
(a) diagrama de comando; (b) diagrama de potência;
Fig. 6.13: arrancador estrela-triângulo convencional.
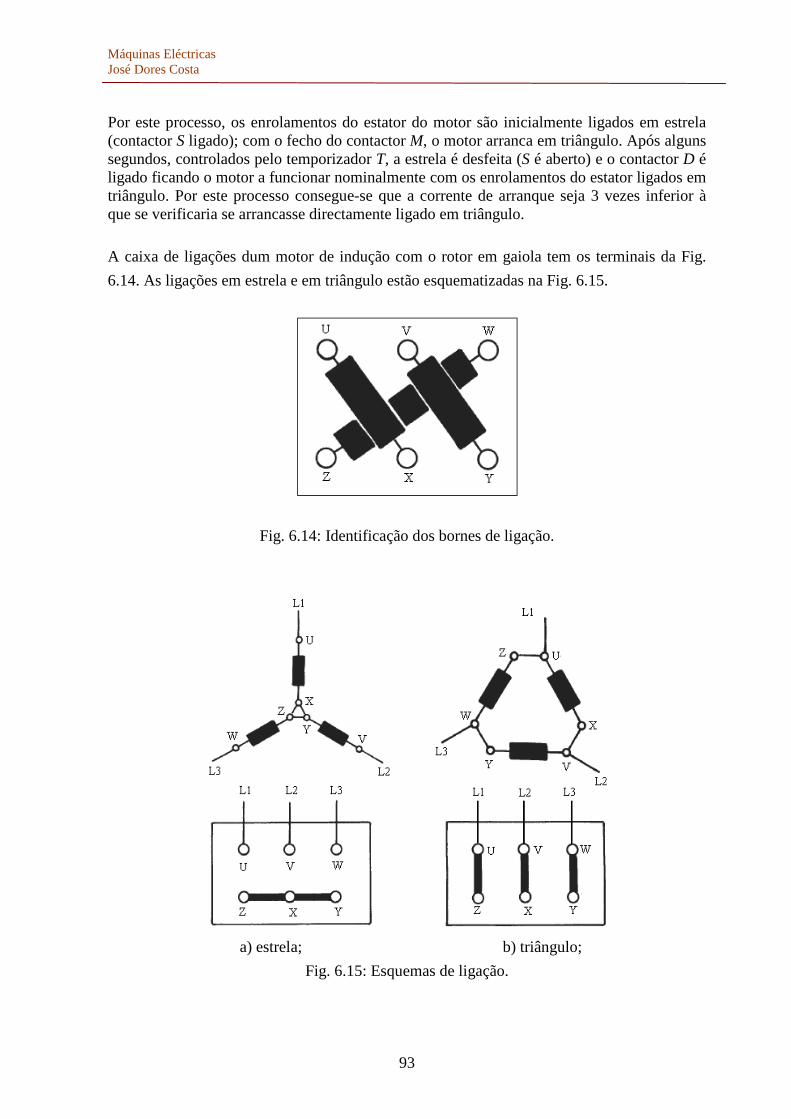
Máquinas Eléctricas José Dores Costa
93
Por este processo, os enrolamentos do estator do motor são inicialmente ligados em estrela (contactor S ligado); com o fecho do contactor M, o motor arranca em triângulo. Após alguns segundos, controlados pelo temporizador T, a estrela é desfeita (S é aberto) e o contactor D é ligado ficando o motor a funcionar nominalmente com os enrolamentos do estator ligados em triângulo. Por este processo consegue-se que a corrente de arranque seja 3 vezes inferior à que se verificaria se arrancasse directamente ligado em triângulo.
A caixa de ligações dum motor de indução com o rotor em gaiola tem os terminais da Fig.
6.14. As ligações em estrela e em triângulo estão esquematizadas na Fig. 6.15.
Fig. 6.14: Identificação dos bornes de ligação.
a) estrela; b) triângulo;
Fig. 6.15: Esquemas de ligação.

Máquinas Eléctricas José Dores Costa
94
6.8 Problemas 6.1 Um motor de indução trifásico com rotor em gaiola tem o estator ligado em estrela e é alimentado à tensão composta de 400V, 50 Hz. O motor roda a 1458 rpm, em regime estacionário; o valor medido da potência de entrada, é 13,7 kW e o da corrente na linha é 24,5 A. A resistência do estator, por fase, é Ω= 2,11R . Desprezando as perdas no ferro e por atrito e ventilação, calcule:
a) a potência no entreferro; b) a potência dissipada no rotor; c) o binário mecânico; d) o rendimento. e) A máquina é usada num aproveitamento eólico com uma potência injectada na rede até 15 kW. Represente graficamente a estimativa da potência a entregar à rede em função da velocidade de rotação e diga como é que esta máquina pode ser usada como gerador.
6.2 Uma máquina de indução trifásica com rotor em gaiola, com 3 pares de pólos, ligada em estrela, tem as seguintes grandezas, por fase, referidas ao estator: R1 = 0,31 Ω X1 = 0,88 Ω Xm = 68 Ω R2 = 0,22 Ω X2 = 0,82 Ω A máquina é ligada à rede eléctrica com Uc = 400 V, 50 Hz. As perdas totais por ventilação e atrito são 612 W, que se admitem constantes, e desprezam-se as perdas no ferro. O escorregamento nominal é 3,5%. Nas condições nominais de tensão, frequência e escorregamento, calcule: a) a potência eléctrica nominal pedida à rede; b) a potência mecânica nominal (no veio); c) o rendimento nominal. d) Estuda-se a possibilidade de acoplamento desta máquina de indução a uma turbina eólica.
Admitindo que o rendimento é constante, qual é a estimativa da potência eléctrica a entregar à rede se a máquina rodar entre1015 e 1040 rpm e qual é o binário mecânico necessário no seu veio?

Máquinas Eléctricas José Dores Costa
95
6.9 ANEXO: Modelo dinâmico da máquina assíncrona
1. Desenvolvimento do modelo A máquina assíncrona trifásica é representada pelo esquema eléctrico monofásico da Fig. 1.1, onde os subíndices s e r designam o estator e o rotor, respectivamente, e em que R representa as perdas no ferro [1, 2].
Fig. 1.1: Esquema eléctrico da máquina assíncrona.
As equações do circuito da Fig. 1.1 são:
tt
iMirv sr
sss d
d
d
d Ψ++= (1.1a)
tt
iMirv rs
rrr d
d
d
d Ψ++= (1.1b)
As equações do fluxo são:
=
ΨΨ
r
s
r
s
r
s
i
i
LM
ML. (1.2)
O coeficientes de auto-indução do estator e do rotor são, respectivamente, Ls=ls+M (1.3a) Lr=lr+M (1.3b) Admite-se que os coeficientes de auto-indução de dispersão do estator e do rotor, respectivamente, ls e lr, são constantes e que o coeficiente de indução mútua, M, depende da posição angular entre o rotor e o estator, θ. As variáveis do estator podem ser transformadas num sistema referencial de dois eixos. Estes eixos estão representados na Fig. 1.2; genericamente pretende-se que um sistema trifásico de índices [a b c] seja substituído por duas componentes equivalentes fictícias nos eixos d-q. Esta transformação pode ser levada a cabo pela chamada transformada de Park [3, 4]. Considerando as correntes trifásicas do estator
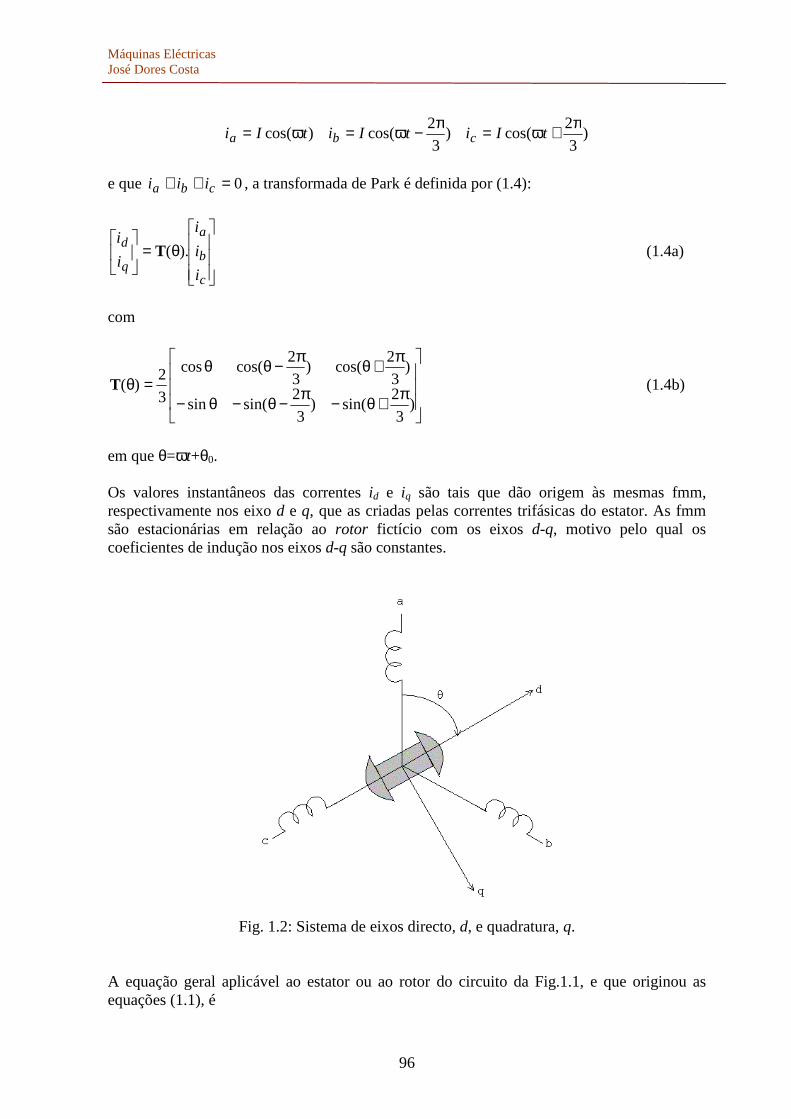
Máquinas Eléctricas José Dores Costa
96
)3
2cos()
3
2cos()cos(
π+ω=π−ω=ω= tIitIitIi cba
e que 0=++ cba iii , a transformada de Park é definida por (1.4):
θ=
c
b
a
q
d
i
i
i
i
i).(T (1.4a)
com
π+θ−π−θ−θ−
π+θπ−θθ=θ
)3
2sin()
3
2sin(sin
)3
2cos()
3
2cos(cos
3
2)(T (1.4b)
em que θ=ωt+θ0. Os valores instantâneos das correntes id e iq são tais que dão origem às mesmas fmm, respectivamente nos eixo d e q, que as criadas pelas correntes trifásicas do estator. As fmm são estacionárias em relação ao rotor fictício com os eixos d-q, motivo pelo qual os coeficientes de indução nos eixos d-q são constantes.
Fig. 1.2: Sistema de eixos directo, d, e quadratura, q. A equação geral aplicável ao estator ou ao rotor do circuito da Fig.1.1, e que originou as equações (1.1), é

Máquinas Eléctricas José Dores Costa
97
triv
d
dΨ+= (1.5)
Num referencial genérico de eixos d-q, as equações para cada um dos eixos correspondentes a (1.5) são:
ddd t
riv
Ψ+=d
d (1.6a)
qqq t
riv
Ψ+=d
d (1.6b)
Para se determinar as componentes segundo d e segundo q das derivadas do fluxo nas segundas parcelas de (1.6), aplica-se a transformada de Park ao fluxo, ψ, criado pelas correntes nas três fases:
ΨΨΨ
θ=
ΨΨ
c
b
a
q
d).(T (1.7)
Tendo em conta que θ=ωt+θ0, derivando (1.7) resulta
ΨΨΨ
θ+
ΨΨΨ
θ=
ΨΨ
c
b
a
c
b
a
q
d ).().( TT &
&
&
&
&
&
(1.8)
com a representação usual td
dΨ=Ψ& e td
d
d
d)(
θθ
=θ TT& .
Tendo em conta (1.7), de (1.8) resulta
ΨωΨω−
+
ΨΨ
=
ΨΨ
d
q
q
d
q
d
)(
)(&
&
&
&
(1.9)
com d
d t
Ψ=Ψd
d)( & e
qq t
Ψ=Ψd
d)( & .
Substituindo (1.9) em (1.6), obtém-se
qd
dd triv Ψω−
Ψ+=
d
d (1.10a)
dq
qq triv Ψω+
Ψ+=
d
d (1.10b)
Máquinas Eléctricas José Dores Costa
98
As equações (1.10) são as equações gerais num referencial genérico. Elas podem ser usadas para se obter um modelo mais simples da máquina assíncrona do que o representado pelas as equações (1.1). Os referenciais a considerar podem estar alinhados com os fluxos do rotor, do estator ou de magnetização. Representando a velocidade angular eléctrica do rotor por ωr, as equações do rotor em relação ao mesmo referencial d-q com velocidade ω também podem ser obtidas através de (1.10), considerando a velocidade relativa (ω-ωr). O referencial mais usual é o alinhado com o rotor cujos eixos são designados por directo, d, e de quadratura, q. Com o sistema de eixos d-q a rodar à velocidade de sincronismo, ωs, as equações da máquina assíncrona são: Estator (subíndice s):
sqssd
sdssd tirv Ψω−
Ψ+=
d
d (1.11a)
sdssq
sqssq tirv Ψω+
Ψ+=
d
d (1.11b)
Rotor (subíndice r):
sqrsrd
rdrrd tirv Ψω−ω−
Ψ+= )(
d
d (1.12a)
rdrsrq
rqrrq tirv Ψω−ω+
Ψ+= )(
d
d (1.12b)
As equações do fluxo são:
=
ΨΨΨΨ
rq
rd
sq
sd
r
r
s
s
rq
rd
sq
sd
i
i
i
i
LM
LM
ML
ML
.
00
00
00
00
(1.13)
ou numa representação mais compacta,
dqsrdq ILΨ = (1.14)
As equações (1.11) e (1.12) podem ser escritas na forma de um modelo de estado:
+
−
ΨΨΨΨ
ω−ω−ω−ω
ω−ω
=
ΨΨΨΨ
rq
rd
sq
sd
rq
rd
sq
sd
r
r
s
s
rq
rd
sq
sd
rs
rs
s
s
rq
rd
sq
sd
v
v
v
v
i
i
i
i
r
r
r
r
.
000
000
000
000
.
0)(00
)(000
000
000
&
&
&
&
(1.15) ou numa representação mais compacta,
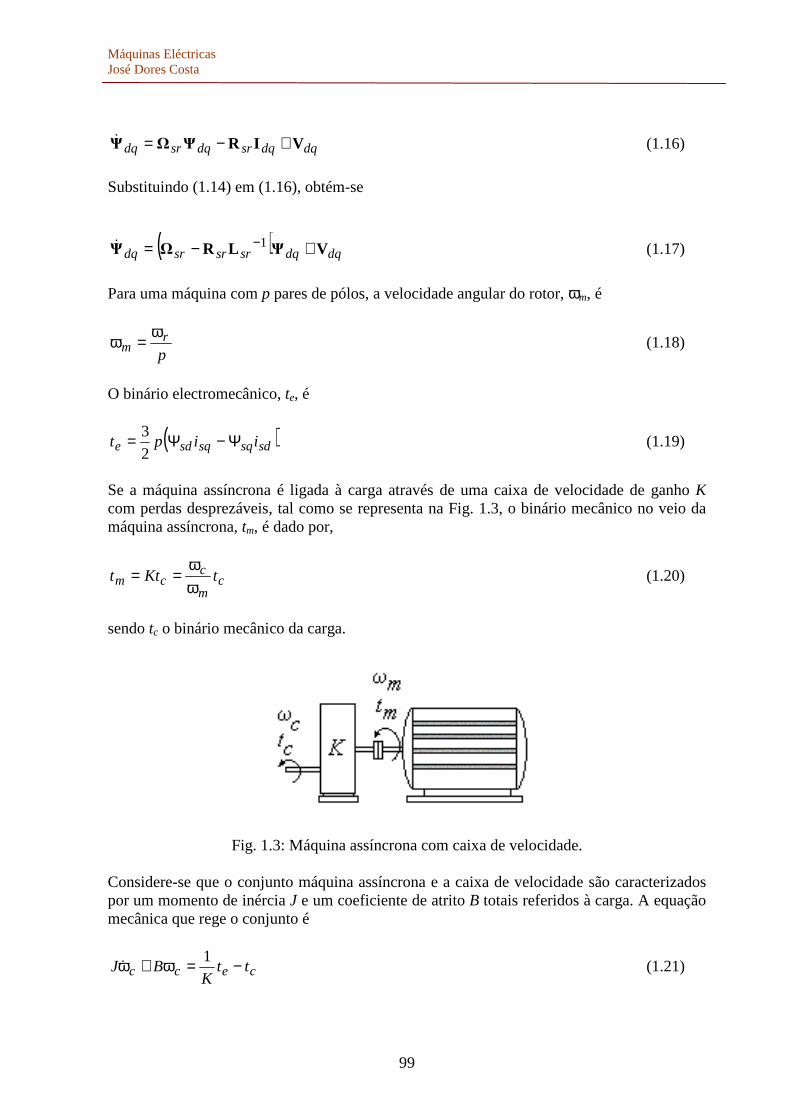
Máquinas Eléctricas José Dores Costa
99
dqdqsrdqsrdq VIRΨΩΨ +−=& (1.16)
Substituindo (1.14) em (1.16), obtém-se
( ) dqdqsrsrsrdq VΨLRΩΨ +−= −1& (1.17)
Para uma máquina com p pares de pólos, a velocidade angular do rotor, ωm, é
pr
mω
=ω (1.18)
O binário electromecânico, te, é
( )sdsqsqsde iipt Ψ−Ψ=2
3 (1.19)
Se a máquina assíncrona é ligada à carga através de uma caixa de velocidade de ganho K com perdas desprezáveis, tal como se representa na Fig. 1.3, o binário mecânico no veio da máquina assíncrona, tm, é dado por,
cm
ccm tKtt
ωω
== (1.20)
sendo tc o binário mecânico da carga.
Fig. 1.3: Máquina assíncrona com caixa de velocidade.
Considere-se que o conjunto máquina assíncrona e a caixa de velocidade são caracterizados por um momento de inércia J e um coeficiente de atrito B totais referidos à carga. A equação mecânica que rege o conjunto é
cecc ttK
BJ −=ω+ω 1& (1.21)
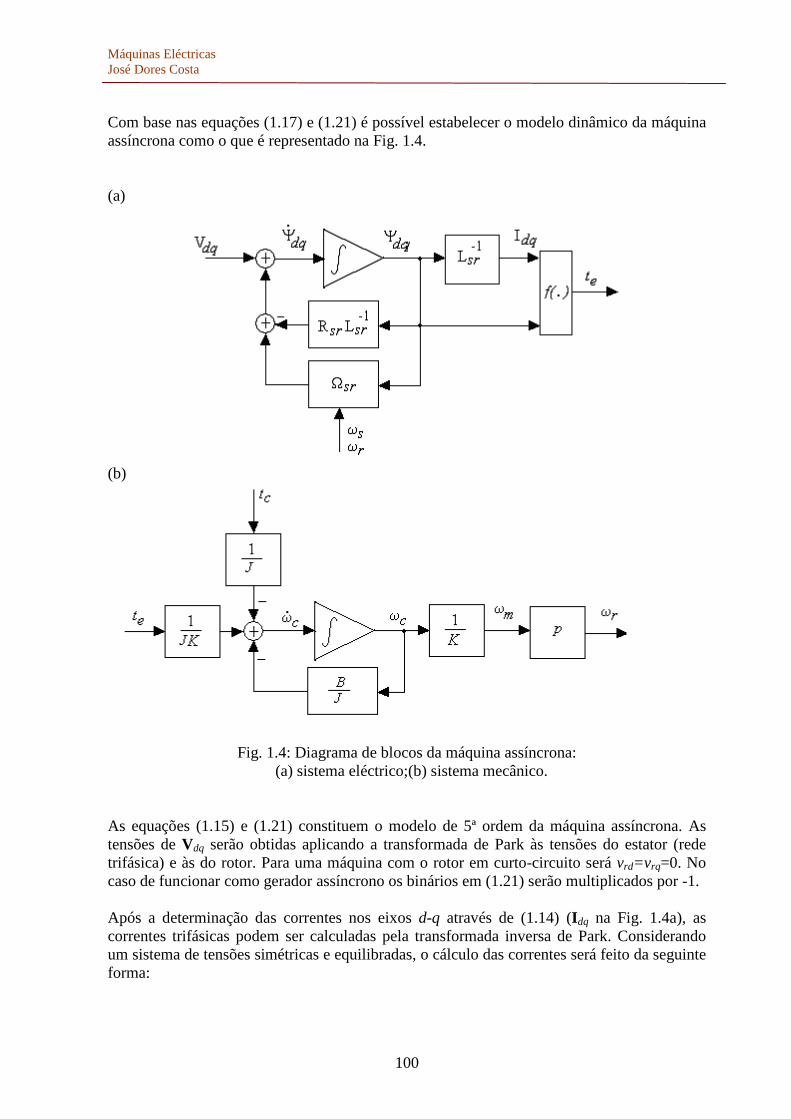
Máquinas Eléctricas José Dores Costa
100
Com base nas equações (1.17) e (1.21) é possível estabelecer o modelo dinâmico da máquina assíncrona como o que é representado na Fig. 1.4. (a)
(b)
Fig. 1.4: Diagrama de blocos da máquina assíncrona: (a) sistema eléctrico;(b) sistema mecânico. As equações (1.15) e (1.21) constituem o modelo de 5ª ordem da máquina assíncrona. As tensões de Vdq serão obtidas aplicando a transformada de Park às tensões do estator (rede trifásica) e às do rotor. Para uma máquina com o rotor em curto-circuito será vrd=vrq=0. No caso de funcionar como gerador assíncrono os binários em (1.21) serão multiplicados por -1. Após a determinação das correntes nos eixos d-q através de (1.14) (I dq na Fig. 1.4a), as correntes trifásicas podem ser calculadas pela transformada inversa de Park. Considerando um sistema de tensões simétricas e equilibradas, o cálculo das correntes será feito da seguinte forma:
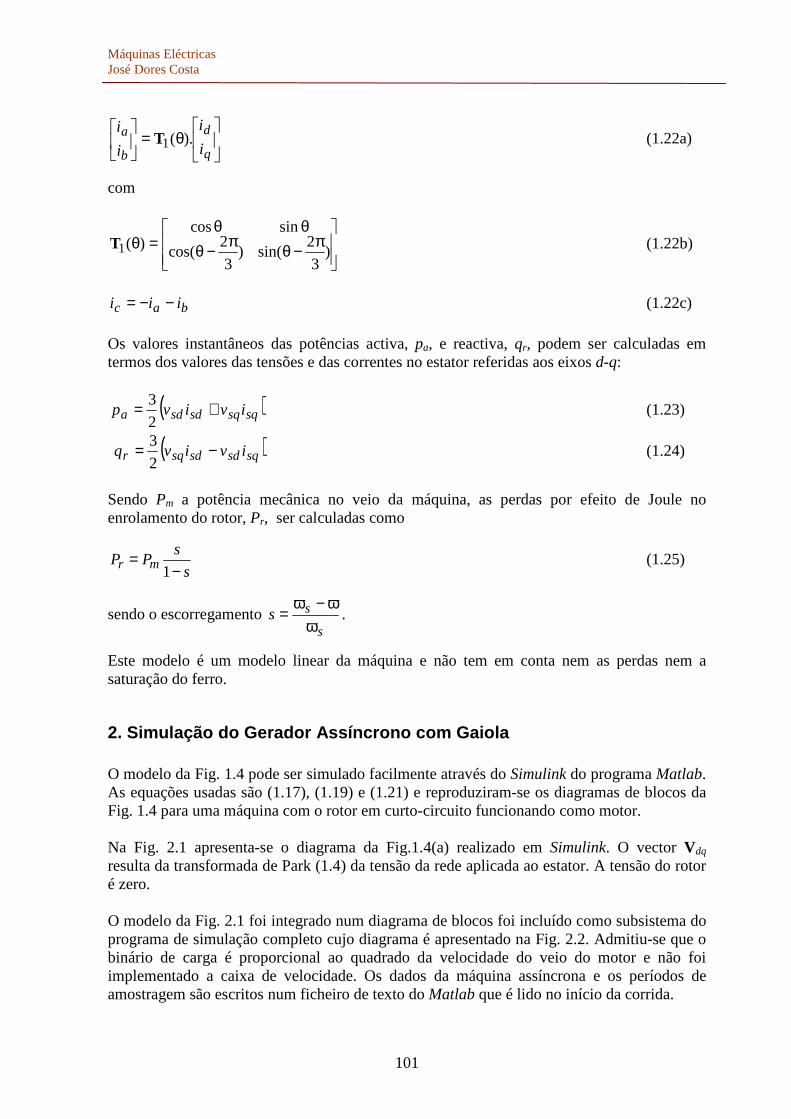
Máquinas Eléctricas José Dores Costa
101
θ=
q
d
b
a
i
i
i
i).(1T (1.22a)
com
π−θπ−θ
θθ=θ )
3
2sin()
3
2cos(
sincos)(1T (1.22b)
bac iii −−= (1.22c)
Os valores instantâneos das potências activa, pa, e reactiva, qr, podem ser calculadas em termos dos valores das tensões e das correntes no estator referidas aos eixos d-q:
( )sqsqsdsda ivivp +=2
3 (1.23)
( )sqsdsdsqr ivivq −=2
3 (1.24)
Sendo Pm a potência mecânica no veio da máquina, as perdas por efeito de Joule no enrolamento do rotor, Pr, ser calculadas como
s
sPP mr −
=1
(1.25)
sendo o escorregamento s
ssω
ω−ω= .
Este modelo é um modelo linear da máquina e não tem em conta nem as perdas nem a saturação do ferro.
2. Simulação do Gerador Assíncrono com Gaiola O modelo da Fig. 1.4 pode ser simulado facilmente através do Simulink do programa Matlab. As equações usadas são (1.17), (1.19) e (1.21) e reproduziram-se os diagramas de blocos da Fig. 1.4 para uma máquina com o rotor em curto-circuito funcionando como motor. Na Fig. 2.1 apresenta-se o diagrama da Fig.1.4(a) realizado em Simulink. O vector Vdq resulta da transformada de Park (1.4) da tensão da rede aplicada ao estator. A tensão do rotor é zero. O modelo da Fig. 2.1 foi integrado num diagrama de blocos foi incluído como subsistema do programa de simulação completo cujo diagrama é apresentado na Fig. 2.2. Admitiu-se que o binário de carga é proporcional ao quadrado da velocidade do veio do motor e não foi implementado a caixa de velocidade. Os dados da máquina assíncrona e os períodos de amostragem são escritos num ficheiro de texto do Matlab que é lido no início da corrida.

Máquinas Eléctricas José Dores Costa
102
Fig. 2.1: Diagrama de blocos da máquina assíncrona em Simulink.
Fig. 2.2: Diagrama de blocos completo da simulação em Simulink.
Máquinas Eléctricas José Dores Costa
103
Para controlo da simulação foram ainda incluídos blocos para o cálculo das potências activa e reactiva, do factor de potência e das correntes na linha. Estas correntes são obtidas por transformada de Park inversa no “bloco de teste” da Fig. 2.1. A alimentação eléctrica é feita através dos blocos do Simulink que realizam uma rede trifásica que alimenta uma carga RLC. Por comodidade, utilizou-se um bloco de medida das tensões da rede a partir do qual se obtêm as tensões simples que serão transformadas para o sistema de eixos d-q através do bloco T_Park da Fig..2.2. Nos parâmetros da simulação do Matlab seleccionou-se o método de integração ode45 (Dormand-Prince) com passo variável (os métodos ode23t e ode23b também foram testados sem se verificar um alteração sensível nos resultados).
3. Resultados da Simulação Para testar o modelo da máquina assíncrona descrito anteriormente, usaram-se os dados utilizados em [5]: Ls=59.4mH, rs=0.24Ω; Lr=59.1mH, rr=0.175Ω; M=57mH; o par de pólos é p=3. A frequência da rede é 50Hz e a amplitude da tensão simples Us= 380V. O momento de inércia total é J=0.5 kg.m2 e considera-se sem atrito, B=0. O binário de carga é Tc=kω2 com k=0.009Nm.s2/rad2. Estes dados foram escritos no ficheiro caract_mcad.m que é lido na corrida do programa da Fig. 2.2. O período de amostragem considerado para a integração numérica é Ts=10-5 s. Na Fig. 3.1 comparam-se os resultados do binário electromecânico obtido por simulação da Fig. 2.2 com o de [5]. Os resultados são concordantes. Na Fig. 3.2 comparam-se os resultados da velocidade no veio do motor obtido por simulação da Fig. 2.2 com o de [5]. Os resultados são concordantes. Na Fig. 3.3 apresentam-se os resultados para as correntes na linha e as potências activa e reactiva obtidos através do modelo da Fig. 2.2 com o bloco “3-phase active & reactive power” do Simulink. Da Fig. 3.3, o valor estacionário da amplitude das correntes na linha é 28A e o valor estacionário da potência activa é 15,67kW, aproximadamente. Da Fig. 3.2, o valor estacionário da velocidade do rotor é 991 rpm e a correspondente potência mecânica é 10.04 kW. O factor de potência, em regime estacionário, era cerca de 0.98. Este valor passa a ser inferior a 0.5 quando se multiplica o binário de carga por -1 para se obter o funcionamento da máquina assíncrona como gerador. A diferença detectada entre as potências (5,63kW) e os valores obtidos para o factor de potência sugerem a existência dum erro no cálculo deste último. Foi feita uma confirmação usando o modelo da máquina assíncrona do Simulink, como se representa na Fig. 3.4, nas mesmas condições; os resultados das figuras 3.1 e 3.2 concordaram com assim os obtidos e as amplitudes das correntes no estator são igualmente concordantes às da Fig. 3.3.

Máquinas Eléctricas José Dores Costa
104
Fig. 3.1: Binário electromecânico: (a) simulação em Simulink; (b) simulação como o modelo [5] de Mathcad.
Fig. 3.2: Velocidade no veio do motor: (a) simulação em Simulink; (b) simulação como o modelo [5] de Mathcad.

Máquinas Eléctricas José Dores Costa
105
Fig. 3.3: Correntes no estator e potências activa e reactiva resultantes da Fig. 2.2.
Fig. 3.4: Diagrama de blocos da simulação com os modelos do Simulink.
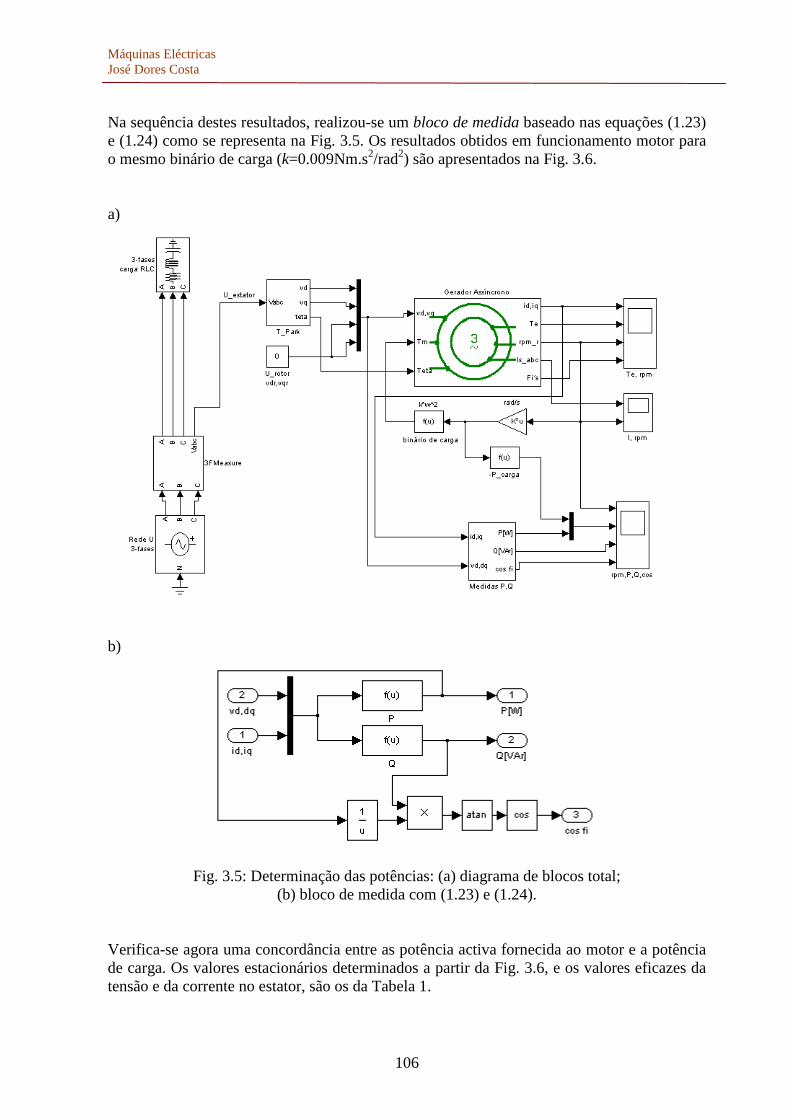
Máquinas Eléctricas José Dores Costa
106
Na sequência destes resultados, realizou-se um bloco de medida baseado nas equações (1.23) e (1.24) como se representa na Fig. 3.5. Os resultados obtidos em funcionamento motor para o mesmo binário de carga (k=0.009Nm.s2/rad2) são apresentados na Fig. 3.6. a)
b)
Fig. 3.5: Determinação das potências: (a) diagrama de blocos total;
(b) bloco de medida com (1.23) e (1.24).
Verifica-se agora uma concordância entre as potência activa fornecida ao motor e a potência de carga. Os valores estacionários determinados a partir da Fig. 3.6, e os valores eficazes da tensão e da corrente no estator, são os da Tabela 1.
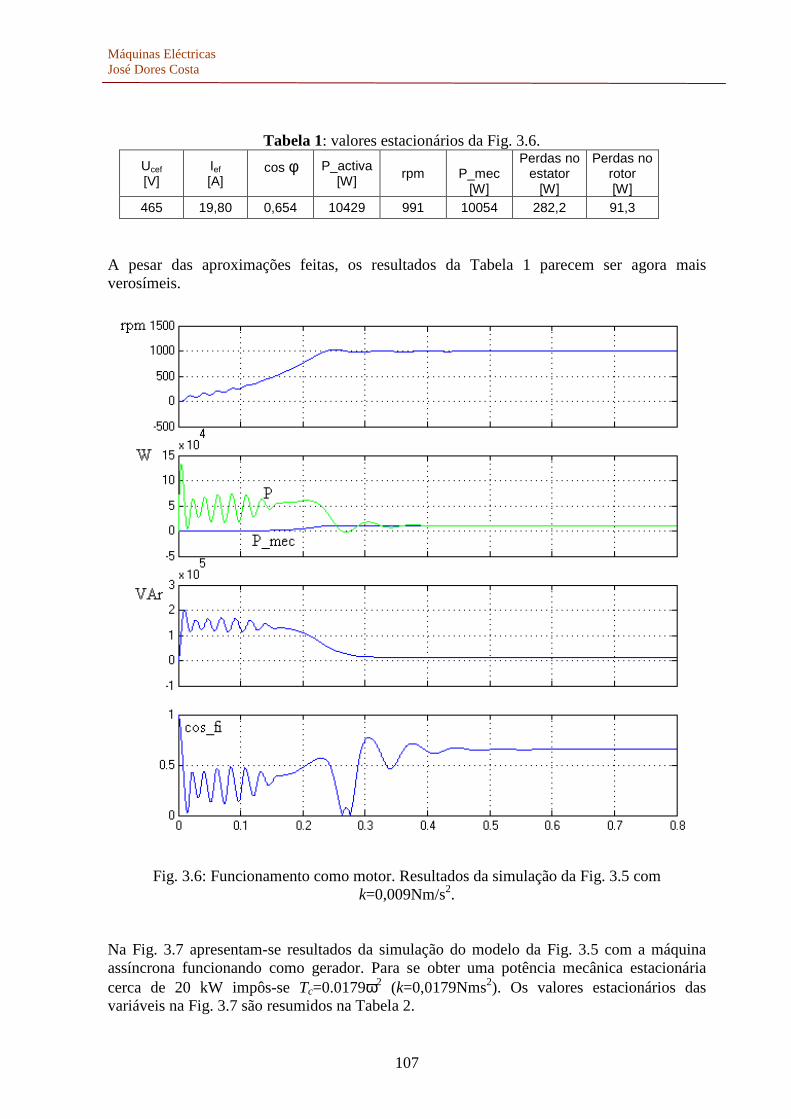
Máquinas Eléctricas José Dores Costa
107
Tabela 1: valores estacionários da Fig. 3.6.
Ucef [V]
Ief [A]
cos φ
P_activa [W]
rpm
P_mec [W]
Perdas no estator
[W]
Perdas no rotor [W]
465 19,80 0,654 10429 991 10054 282,2 91,3
A pesar das aproximações feitas, os resultados da Tabela 1 parecem ser agora mais verosímeis.
Fig. 3.6: Funcionamento como motor. Resultados da simulação da Fig. 3.5 com k=0,009Nm/s2.
Na Fig. 3.7 apresentam-se resultados da simulação do modelo da Fig. 3.5 com a máquina assíncrona funcionando como gerador. Para se obter uma potência mecânica estacionária cerca de 20 kW impôs-se Tc=0.0179ω2 (k=0,0179Nms2). Os valores estacionários das variáveis na Fig. 3.7 são resumidos na Tabela 2.
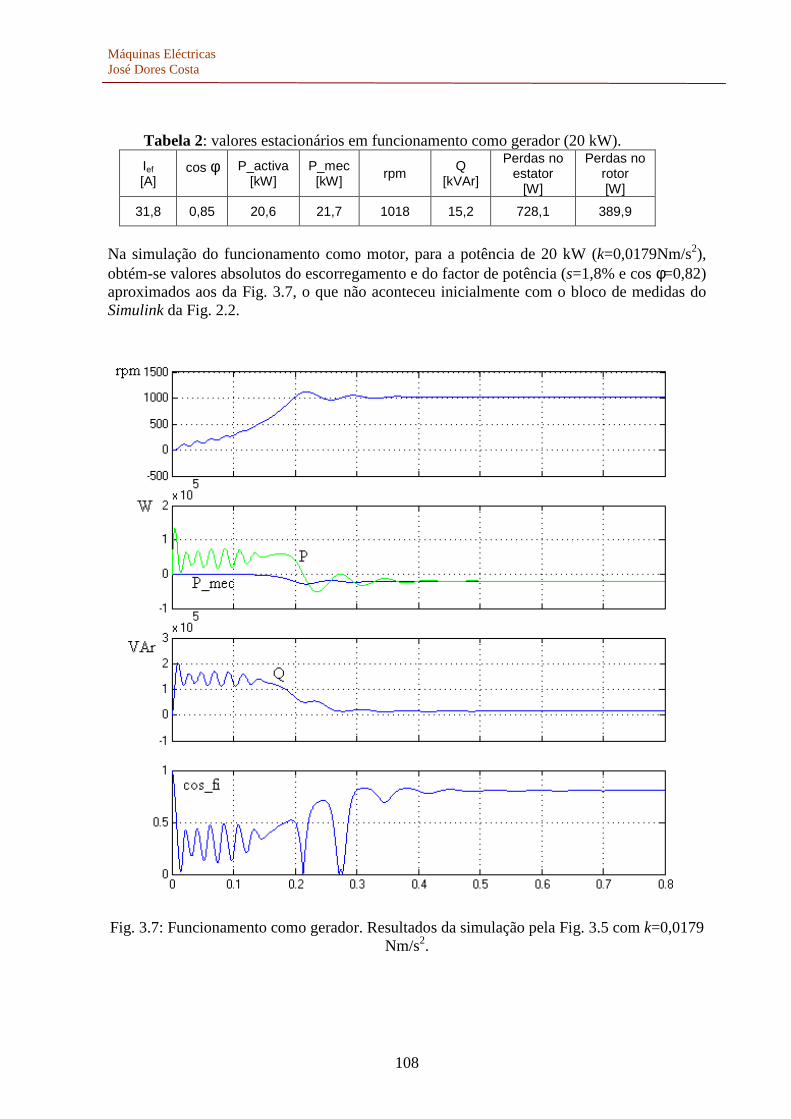
Máquinas Eléctricas José Dores Costa
108
Tabela 2: valores estacionários em funcionamento como gerador (20 kW).
Ief [A]
cos φ
P_activa [kW]
P_mec [kW]
rpm Q
[kVAr]
Perdas no estator
[W]
Perdas no rotor [W]
31,8 0,85 20,6 21,7 1018 15,2 728,1 389,9
Na simulação do funcionamento como motor, para a potência de 20 kW (k=0,0179Nm/s2), obtém-se valores absolutos do escorregamento e do factor de potência (s=1,8% e cos φ=0,82) aproximados aos da Fig. 3.7, o que não aconteceu inicialmente com o bloco de medidas do Simulink da Fig. 2.2.
Fig. 3.7: Funcionamento como gerador. Resultados da simulação pela Fig. 3.5 com k=0,0179 Nm/s2.

Máquinas Eléctricas José Dores Costa
109
4. Conclusões São muitas as publicações sobre DFIM (Doubly-Fed Induction Machine) ou DFIG (Doubly-Fed Induction Generator) que referem os modelos das máquinas assíncronas. Estes modelos são indispensáveis para o projecto dos controladores e para o estudo da estabilidade das redes e dos parques eólicos. Todavia não é fácil encontrar referências que apresentem os modelos usados de uma forma completa. Por esse motivo aqui se refere um modelo desenvolvido de origem para uma máquinas assíncronas funcionando quer como motor quer como gerador. O modelo desenvolvido é um modelo linear e recorre à transformação de um sistema trifásico simétrico e equilibrado para dois eixos ortogonais (transformada de Park) susceptível de ser implementado em programas de simulação numérica em computador, como sejam, o Matlab-Simulink, o Mathcad ou o Scilab-Scicos, entre outros. O modelo foi desenvolvido em Matlab-Simulink e os resultados da simulação foram comparados com resultados publicados por outro autor que utilizou um modelo diferente para Mathcad. Os resultados apresentam uma boa concordância. A mesma boa concordância foi obtida quando os resultados foram comparados com os obtidos directamente dos modelos já implementados no Simulink.
5. Bibliografia [1] A.E. Fitzgerald, C. Kingsley, S.D. Umans, Electric Machinery, McGraw-Hill, 2002. [2] Edward Wilson Kimbark, Power System Stability: Synchronous Machines, Dover
Publications Inc, New York,1968. [3] Aleksandar R. Katancevic, Transient and Dynamic Stability on Wind Farms, MscEE
Thesis, Helsinki University os Thecnology, 2003. [4] Markus A. Poller, “Doubly-Fed Induction Machine Models for Stability Assessment of
Wind Farms”, Power Tech Conference Proc., Bologna, 2003. [5] Francesco Orsi, Studio del Modelo Dinamico del Motor Asincrono, Mathcad Library,
http://www.mathcad.com/Library/LibraryContent/MathML/mod3.htm
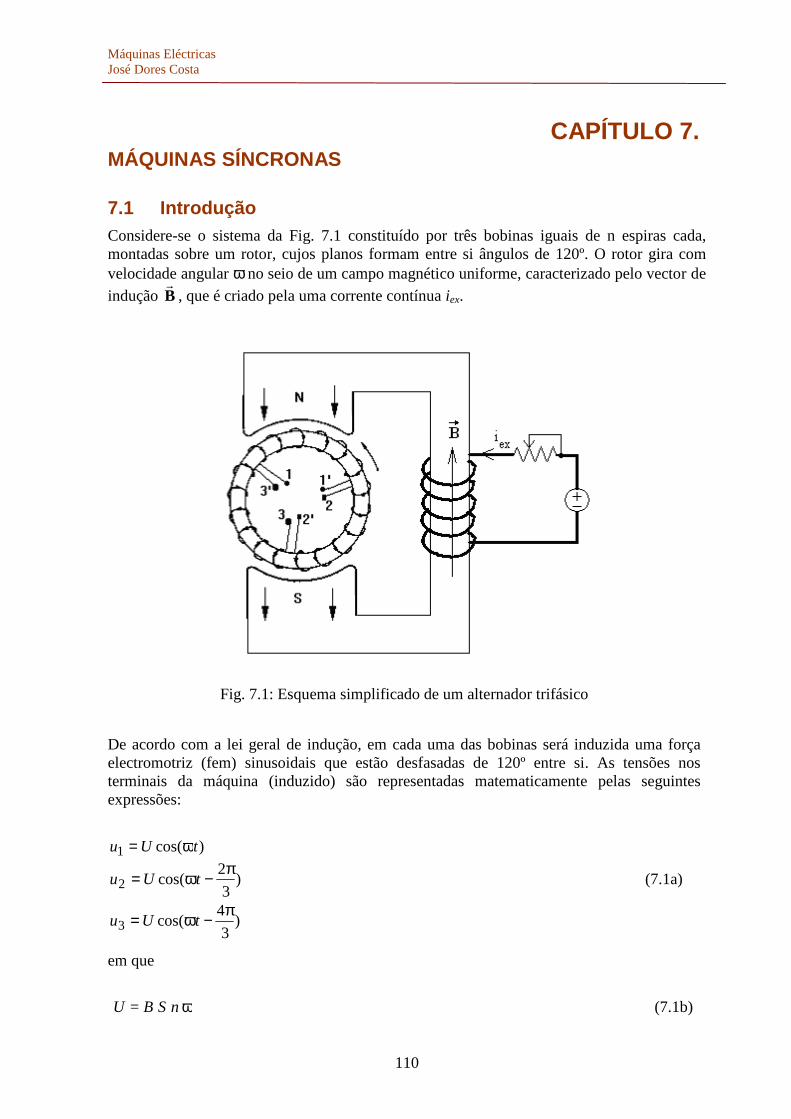
Máquinas Eléctricas José Dores Costa
110
CAPÍTULO 7. MÁQUINAS SÍNCRONAS
7.1 Introdução Considere-se o sistema da Fig. 7.1 constituído por três bobinas iguais de n espiras cada, montadas sobre um rotor, cujos planos formam entre si ângulos de 120º. O rotor gira com velocidade angular ω no seio de um campo magnético uniforme, caracterizado pelo vector de indução B
r, que é criado pela uma corrente contínua iex.
Fig. 7.1: Esquema simplificado de um alternador trifásico
De acordo com a lei geral de indução, em cada uma das bobinas será induzida uma força electromotriz (fem) sinusoidais que estão desfasadas de 120º entre si. As tensões nos terminais da máquina (induzido) são representadas matematicamente pelas seguintes expressões:
)3
4cos(
)3
2cos(
)cos(
3
2
1
π−ω=
π−ω=
ω=
tUu
tUu
tUu
(7.1a)
em que
= U B S n ω (7.1b)
Máquinas Eléctricas José Dores Costa
111
sendo U é a amplitude das tensões, B é intensidade da indução magnética e S representa a área definida por uma das n espiras da bobina.
As equações (7.1) podem ser representadas vectorialmente pelas suas amplitudes complexas, tal como foi referido no capítulo 4. O esquema da Fig. 7.1 descreve o princípio de funcionamento de um alternador trifásico. Estas máquinas são caracterizadas por existir uma relação constante entre a velocidade de rotação do rotor, n, e a frequência, f, das tensões induzidas: f=p n (7.2) sendo p é o número de pares de pólos do indutor, f a frequência das tensões, em Hz, e n a velocidade de rotação em rotações por segundo (rps). As máquinas síncronas são máquinas reversíveis porque podem funcionar quer como motores quer como geradores, sendo utilizadas principalmente como geradores para a produção de energia eléctrica. De acordo com (7.1), o valor eficaz da tensão numa bobina é
UBSn
n fef = =ω φ π2
2max (7.3)
A equação (7.3) permite tirar as seguintes conclusões:
a) o valor eficaz das tensões aos terminais da máquina é proporcional ao número de espiras, à intensidade do campo magnético e à velocidade;
b) para que a frequência seja constante é necessário que a velocidade do rotor seja constante;
c) mantendo a velocidade constante, o valor eficaz das tensões pode ser modificado através da variação do campo indutor.
As conclusões (a) e (b) mostram que pode ser vantajosa a utilização de um electroíman no
indutor (Fig. 7.1) percorrido por uma corrente contínua regulável. Na Fig. 7.1 representou-se
um induzido móvel o que obriga a utilizar um sistema de anéis e escovas para interligar a
máquina com a carga ou com uma fonte de tensão. Em máquinas de grande potência esta
situação não é vantajosa porque, como a ligação eléctrica não é perfeita, correntes com
intensidades elevadas produzem uma queda de tensão elevada entre anéis e escovas e dão
origem a arcos eléctricos que desgastam os anéis e as escovas. Normalmente, nos geradores
síncronos industriais, o rotor da Fig. 7.1 é constituído por um núcleo de material
ferromagnético sobre o qual é bobinado o enrolamento de excitação (o indutor) e o estator é
a carcaça da máquina, que também é de material ferromagnético, na qual se colocam os
enrolamentos do induzido. Em funcionamento normal, em regime permanente, a corrente e a
tensão no rotor são contínuas e as do estator são, idealmente, alternadas sinusoidais.

Máquinas Eléctricas José Dores Costa
112
A tensão imposta pelo alternador é, idealmente, sinusoidal, com amplitude e frequência
reguláveis. A regulação da tensão do alternador exige a regulação simultânea da velocidade
e da corrente de excitação. Resumidamente, a relação entre estas variáveis é esquematizada
no quadro seguinte:
O rotor pode ser de pólos salientes ou cilíndricos; no caso de ter pólos salientes, Fig. 7.2(a),
existe um núcleo central sobre o veio da máquina em torno do qual são montadas as
bobinas indutoras; no caso de pólos salientes, os condutores do indutor são montados em
cavas, o que se representa na Fig. 7.2(b). Para máquinas de grande velocidade (por exemplo,
3000 rpm com 1 par de pólos) os pólos salientes são desvantajosos porque exigem maior
resistência mecânica face às forças a que são submetidos e nesse caso utilizam-se
normalmente rotores cilíndricos.
(a) (b)
Fig. 7.2: Tipos de rotor; (a) pólos salientes; (b) cilíndrico.
Nos alternadores industriais, a alimentação do circuito do indutor é feita a partir da tensão induzida no estator, o que se esquematiza na Fig. 7.3. No início, quando a máquina é posta em marcha, o campo magnético remanescente no ferro indutor é suficiente para induzir no estator uma tensão de pequena amplitude que, rectificada, irá permitir aumentar o campo indutor; este aumento faz, por sua vez, aumentar a amplitude da tensão induzida, o que permite novo aumento da corrente de campo (iex), e assim sucessivamente até se atingir um
Máquinas Eléctricas José Dores Costa
113
regime estacionário próximo do desejado. Por este motivo, é absolutamente necessário que exista um campo magnético remanescente no ferro do indutor, antes que o alternador seja posto em marcha e que possa fornecer energia eléctrica; sempre que isso não se verifica, torna-se necessário magnetizar previamente o circuito do indutor através de uma fonte externa de tensão contínua.
Fig. 7.3: Esquema de um alternador trifásico com excitação própria.
A energia eléctrica fornecida pelo alternador provém da energia mecânica que lhe é fornecida pela máquina que faz girar o rotor. A potência mecânica útil é transformada em energia eléctrica, parte da qual (normalmente uma pequena parte) é utilizada pelo circuito do indutor, e a restante, descontando as perdas electromagnéticas, é fornecida à carga. O trânsito de potências da máquina síncrona é representado na Fig. 7.4.
Fig. 7.4: Trânsito de potências no alternador síncrono.
Quando a máquina síncrona funciona como motor, a energia eléctrica é fornecida ao estator, e ao rotor a partir da rede eléctrica, e a máquina fornece energia mecânica à carga através do veio. Os motores síncronos usam-se na indústria principalmente em máquinas de grande potência. Todavia, pelos motivos já referidos, estaremos fundamentalmente interessados no funcionamento como geradores e será esse o desenvolvimento dos parágrafos seguintes.

Máquinas Eléctricas José Dores Costa
114
7.2 Reacção do induzido
Até agora referiu-se o funcionamento do alternador em vazio. Se o alternador alimentar uma carga trifásica, os enrolamentos do induzido serão também percorridos por correntes eléctricas. Admita-se que a carga trifásica é equilibrada: neste caso, o induzido é percorrido por um sistema de correntes trifásicas simétricas que dão origem a um campo magnético girante. Este campo magnético roda em fase com o rotor é, portanto, estacionário em relação ao campo indutor e está em permanente interligação com ele. Dito de outro modo, o campo criado pelas correntes no induzido, designado por reacção do induzido, é um campo magnético girante que roda em sincronismo com o rotor; por isso, estas máquinas são designadas por máquinas síncronas. A justificação para o aparecimento do campo girante foi dada no parágrafo 5.1. Resumidamente, as três correntes
)3
4cos(
)3
2cos(
)cos(
3
2
1
π−ω=
π−ω=
ω=
tIi
tIi
tIi
(7.4)
dão origem a três campos de indução magnéticos perpendiculares aos planos dos enrolamentos e cujas intensidades, admitindo que o meio é linear, são, respectivamente,
)3
4cos(
)3
2cos(
)cos(
3
2
1
π−ω=
π−ω=
ω=
tBB
tBB
tBB
m
m
m
(7.5)
Como os planos das espiras fazem ângulos de 120º entre si, os vectores 321 e, BBBrrr
estão
também desfasados de 120º entre si. Em cada instante, a reacção do induzido é
321 BBBBrrrr
++=r . O vector resultante tem uma intensidade mr BB 5,1= e opõe-se ao
campo do indutor. Numa máquina síncrona existem então, permanentemente, dois campos magnéticos girantes, qualquer deles rodando em sincronismo com o rotor:
- o campo indutor, criado pela corrente de excitação; - a reacção do induzido, criado pelas correntes trifásicas nos enrolamentos do estator. Da interacção destes dois campos magnéticos resulta um outro campo girante (o campo resultante) que também gira em sincronismo com o rotor e cujo fluxo, sendo variável em relação ao estator, dará origem ao sistema trifásico de fem induzidas nos enrolamentos do estator. A existência dos dois campos girantes, do indutor e do induzido, é portanto fundamental para a caracterização do funcionamento da máquina síncrona quer como motor quer como gerador.
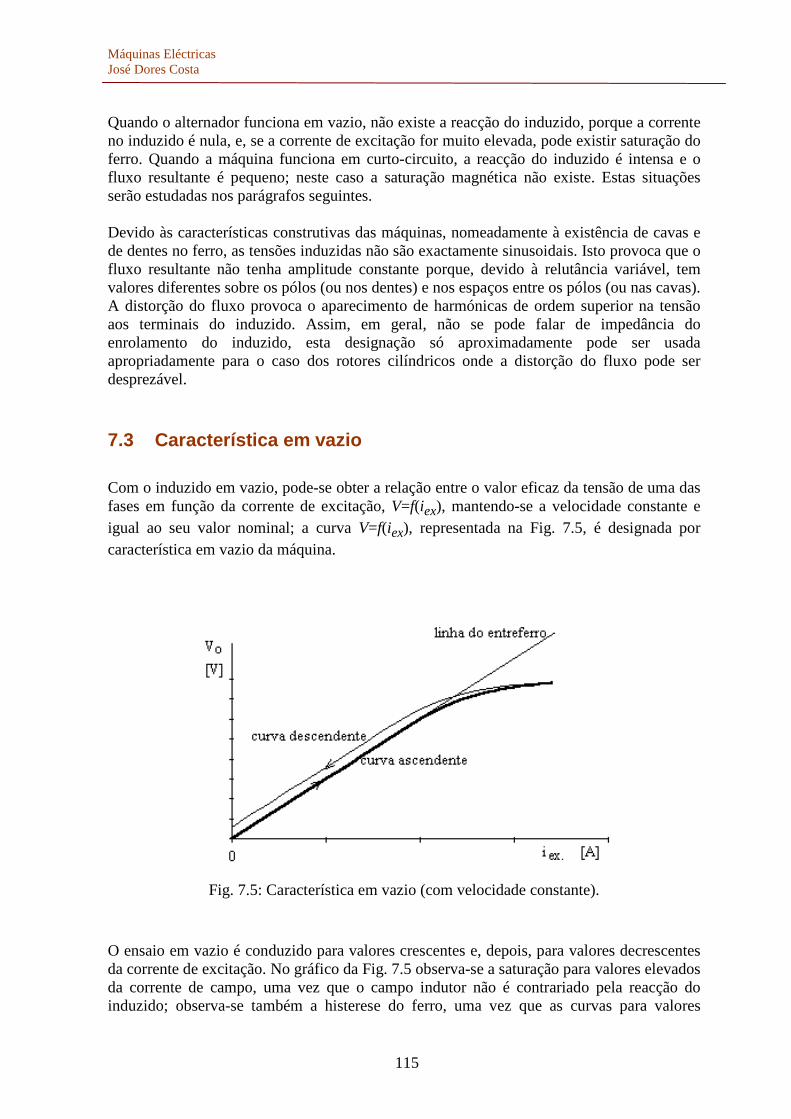
Máquinas Eléctricas José Dores Costa
115
Quando o alternador funciona em vazio, não existe a reacção do induzido, porque a corrente no induzido é nula, e, se a corrente de excitação for muito elevada, pode existir saturação do ferro. Quando a máquina funciona em curto-circuito, a reacção do induzido é intensa e o fluxo resultante é pequeno; neste caso a saturação magnética não existe. Estas situações serão estudadas nos parágrafos seguintes. Devido às características construtivas das máquinas, nomeadamente à existência de cavas e de dentes no ferro, as tensões induzidas não são exactamente sinusoidais. Isto provoca que o fluxo resultante não tenha amplitude constante porque, devido à relutância variável, tem valores diferentes sobre os pólos (ou nos dentes) e nos espaços entre os pólos (ou nas cavas). A distorção do fluxo provoca o aparecimento de harmónicas de ordem superior na tensão aos terminais do induzido. Assim, em geral, não se pode falar de impedância do enrolamento do induzido, esta designação só aproximadamente pode ser usada apropriadamente para o caso dos rotores cilíndricos onde a distorção do fluxo pode ser desprezável.
7.3 Característica em vazio
Com o induzido em vazio, pode-se obter a relação entre o valor eficaz da tensão de uma das fases em função da corrente de excitação, V=f(iex), mantendo-se a velocidade constante e igual ao seu valor nominal; a curva V=f(iex), representada na Fig. 7.5, é designada por característica em vazio da máquina.
Fig. 7.5: Característica em vazio (com velocidade constante).
O ensaio em vazio é conduzido para valores crescentes e, depois, para valores decrescentes da corrente de excitação. No gráfico da Fig. 7.5 observa-se a saturação para valores elevados da corrente de campo, uma vez que o campo indutor não é contrariado pela reacção do induzido; observa-se também a histerese do ferro, uma vez que as curvas para valores

Máquinas Eléctricas José Dores Costa
116
crescentes e decrescentes de iex não coincidem; e observa-se a existência dum campo remanescente no ferro do indutor. Recorde-se que as perdas por histerese, que são proporcionais à área definida pelas curvas crescente e decrescente, vão contribuir para a parcela das perdas electromagnéticas referidas na Fig. 7.4. Na zona linear, cujo prolongamento dá origem à designada característica do entreferro, a tensão em vazio é directamente proporcional à corrente de excitação. Esta situação modifica-se quando o alternador funciona em carga por causa da reacção do induzido.
7.4 Característica em curto-circuito
Com o induzido em curto-circuito, pode-se obter a relação entre o valor eficaz da tensão de uma das fases em função da corrente de excitação, Icc=f(iex),mmantendo a velocidade constante, se possível, igual ao valor nominal. No ensaio em curto-circuito, aumenta-se progressivamente iex desde zero até um valor tal que a corrente no induzido seja igual ao valor nominal da corrente do alternador, isto e, Icc=IN (Fig. 7.6). O ensaio pode ser completado, considerando depois os valores decrescentes de iex. A curva I=f(iex) está representada na Fig. 7.6 e é designada por característica de curto-circuito.
Fig. 7.6: Característica de curto-circuito (com velocidade constante).
Com a máquina em curto-circuito, verifica-se que a corrente de curto-circuito é directamente proporcional à corrente de excitação porque a reacção do induzido reduz o fluxo magnético e não existe saturação.
7.5 Circuito eléctrico equivalente No caso das máquinas com rotores cilíndricos, onde a tensão é mais aproximadamente sinusoidal, é possível estabelecer-se um modelo eléctrico do induzido da máquina síncrona funcionando em regime estacionário. Cada uma das fases do induzido pode ser representada

Máquinas Eléctricas José Dores Costa
117
por um dipólo equivalente de Thevenin, tal como se representa na Fig. 7.7; nesta figura, Zs=R+jXs é a impedância equivalente designada por impedância síncrona, sendo R é a resistência de um dos enrolamentos do induzido e Xs a reactância síncrona que depende do fluxo no induzido e cujo valor pode ser determinado a partir das curvas das figuras 7.5 e 7.6, após a medição de R.
Vo
R Xs
~ Va
Ia
Fig. 7.7: Modelo eléctrico, por fase, da máquina síncrona em regime estacionário. Admitindo que os ensaios das figuras 7.5 e 7.6 foram feitos com a mesma velocidade de rotação, para cada valor de iex determinam-se os correspondentes valores eficazes de VO e de Icc; a reactância síncrona é obtida por
X Z R ZV
Is s sO
cc= − =2 2 com (7.6)
O circuito da Fig.7.7 é um modelo aproximado e só é válido para o funcionamento em regime estacionário com a velocidade de rotação considerada para os ensaios em vazio e em curto-circuito. Numa máquina com rotor cilíndrico, a reactância síncrona é, aproximadamente, independente da posição do rotor e o modelo eléctrico da Fig. 7.7 pode ser usado com suficiente aproximação para fins práticos. Ao contrário, numa máquina com rotor de pólos salientes o circuito é uma aproximação grosseira porque a reactância síncrona depende da posição angular do rotor. Para se obter um valor constante para Xs, os valores eficazes de VO devem ser lidos sobre a característica do entreferro. Assim, determina-se um modelo linear (sem saturação), duma fase do induzido do alternador com rotor cilíndrico, em regime estacionário. Note-se que a noção de reactância foi introduzida na Electrotecnia para circuitos eléctricos estáticos e que reactância síncrona pode ser considerada uma extensão daquele conceito para circuitos com partes móveis.
A resistência R é normalmente muito inferior a Xs e é normalmente desprezável na equação (7.6). A determinação da reactância síncrona pode ser feita a partir das características dos ensaios em vazio e de curto-circuito como se representa na Fig. 7.8. A reactância síncrona não saturada, Xs, é constante e resulta de (7.6), sendo VO e ICC determinados para o mesmo valor da corrente de campo (ou de excitação) i’ f.
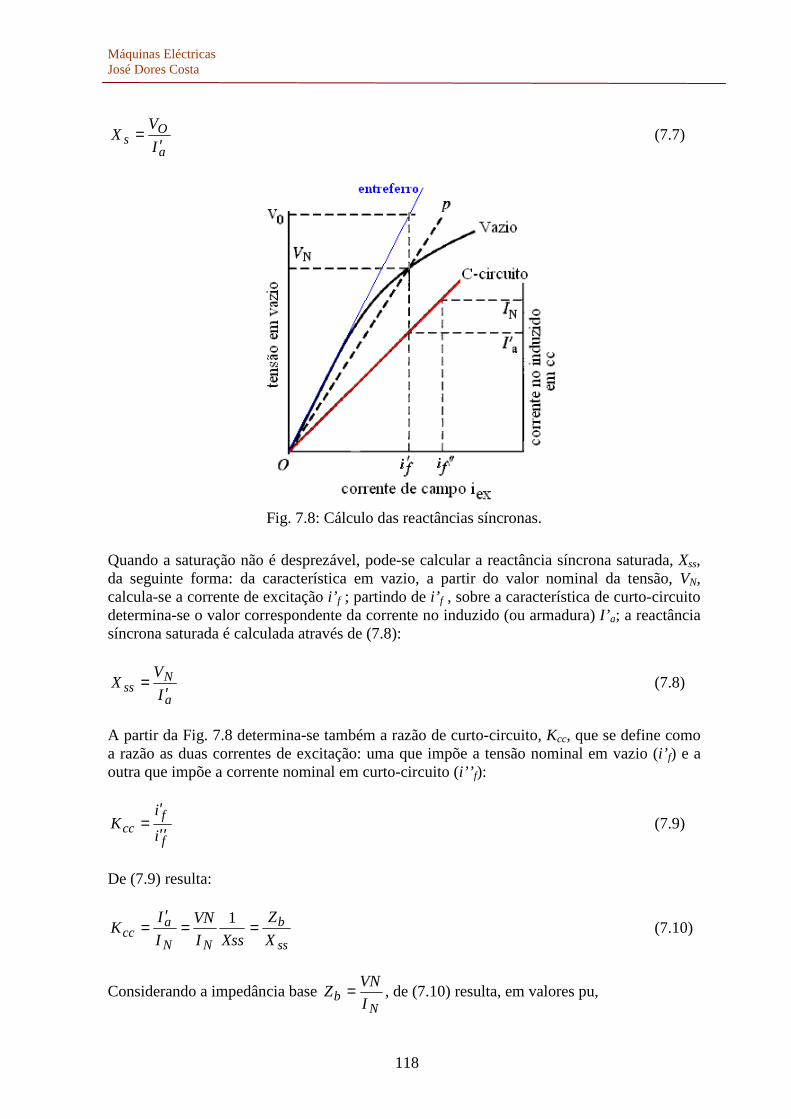
Máquinas Eléctricas José Dores Costa
118
a
Os I
VX
′= (7.7)
Fig. 7.8: Cálculo das reactâncias síncronas.
Quando a saturação não é desprezável, pode-se calcular a reactância síncrona saturada, Xss, da seguinte forma: da característica em vazio, a partir do valor nominal da tensão, VN, calcula-se a corrente de excitação i’ f ; partindo de i’ f , sobre a característica de curto-circuito determina-se o valor correspondente da corrente no induzido (ou armadura) I’ a; a reactância síncrona saturada é calculada através de (7.8):
a
Nss I
VX
′= (7.8)
A partir da Fig. 7.8 determina-se também a razão de curto-circuito, Kcc, que se define como a razão as duas correntes de excitação: uma que impõe a tensão nominal em vazio (i’ f) e a outra que impõe a corrente nominal em curto-circuito (i’’ f):
f
fcc i
iK
′′′
= (7.9)
De (7.9) resulta:
ss
b
NN
acc X
Z
XssI
VN
I
IK ==
′= 1
(7.10)
Considerando a impedância base N
b I
VNZ = , de (7.10) resulta, em valores pu,

Máquinas Eléctricas José Dores Costa
119
)(
1
puXK
sscc = (7.11)
A razão de curto-circuito permite caracterizar a “qualidade” da máquina síncrona. Para a mesma potência e corrente nominais, uma máquina com menor Kcc tem menor volume e menor peso, e tem menor custo. Para o circuito da Fig. 7.7, é válida a seguinte equação:
aasaaexO VIjXIRiVrrrr
++=)( (7.12)
Perante iguais variações de carga, uma máquina com Kcc maior necessita de menor variação da corrente de excitação para manter a tensão Va constante e tem melhor estabilidade quando funciona em paralelo com a rede. A título meramente indicativo, verifica-se que nas máquinas com rotor cilíndrico
0,7 0,5 << ccK e que nas máquinas com pólos salientes é 1,0 < Kcc < 1,4. O aumento do
entreferro implica o aumento da relutância magnética e a diminuição de Xs. Consequentemente, Kcc aumenta e a estabilidade do funcionamento em paralelo com a rede é melhorada.
7.6 Coeficientes de indução
Na Fig. 7.9 representam-se os eixos dos campos magnéticos dos enrolamentos do rotor (cilíndrico) e do estator. Porque a saliência do rotor não existe, numa máquina de rotor cilíndrico, os coeficientes de indução são independentes da posição angular do rotor, isto é, são independentes de θm.
Fig. 7.9: Eixos magnéticos dos enrolamentos.

Máquinas Eléctricas José Dores Costa
120
Os coeficientes de indução próprios e mútuos dos enrolamentos da fase a e do campo, f, são:
fdffff lLL += 0 (7.13)
adaaaa lLL += 0 (7.14)
)cos( tLL eafmaf ω= (7.15)
em que ω=ω pe e lad e lfd são os coeficientes de indução de dispersão da fase a e do
enrolamento do campo, respectivamente.
O coeficiente de indução mútua entre a bobina da fase a e a da fase b é
2)º120cos( 0
0aa
aaabL
LL −=⋅= (7.16)
De acordo com (7.13) a (7.16), o fluxo associado ao enrolamento da fase a, Ψa, depende de todas as correntes da máquina. Tendo em conta que num sistema trifásico equilibrado é
)( cba iii +−= , Ψa é dado por
( )
fafaadaaa
fafcbaaaadaaa
iLilL
iLiiLilL
+
+=Ψ
++−+=Ψ
0
00
2
3
)(2
1
(7.17)
Introduzindo um coeficiente de auto-indução síncrono Ls,
adaas lLL += 02
3 (7.18)
o fluxo associado à fase a é
fafasa iLiL +=Ψ (7.19)
A reactância síncrona numa máquina de rotor cilíndrico é então ess LX ω= .
Representando por eaf a fem induzida pela corrente de campo, i f, na fase a do gerador, tendo em conta (7.19), é válida a seguinte equação:
tiRve aaaaf d
dΨ++= (7.20)
A equação (7.20) dá origem ao circuito da Fig. 7.10 como modelo duma fase da máquina síncrona com rotor cilíndrico (o circuito coincide com o da Fig. 7.7).
Fig. 7.10: Modelo da máquina com rotor cilíndrico.
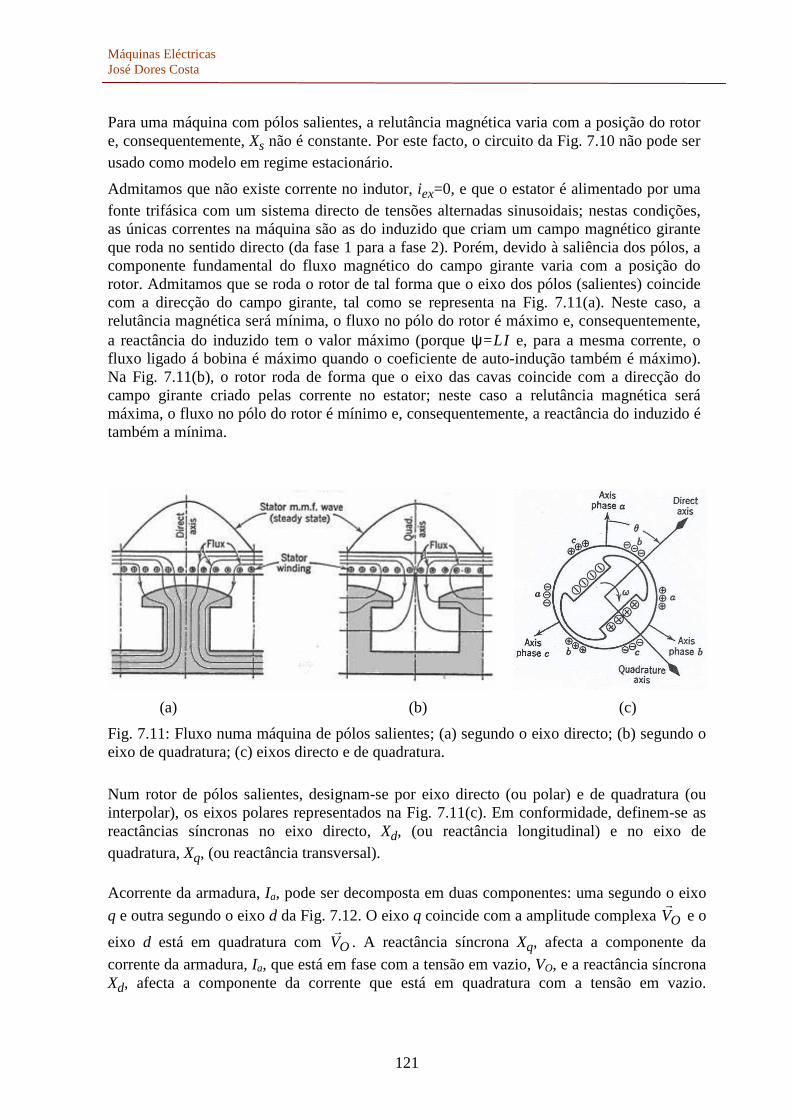
Máquinas Eléctricas José Dores Costa
121
Para uma máquina com pólos salientes, a relutância magnética varia com a posição do rotor e, consequentemente, Xs não é constante. Por este facto, o circuito da Fig. 7.10 não pode ser usado como modelo em regime estacionário.
Admitamos que não existe corrente no indutor, iex=0, e que o estator é alimentado por uma fonte trifásica com um sistema directo de tensões alternadas sinusoidais; nestas condições, as únicas correntes na máquina são as do induzido que criam um campo magnético girante que roda no sentido directo (da fase 1 para a fase 2). Porém, devido à saliência dos pólos, a componente fundamental do fluxo magnético do campo girante varia com a posição do rotor. Admitamos que se roda o rotor de tal forma que o eixo dos pólos (salientes) coincide com a direcção do campo girante, tal como se representa na Fig. 7.11(a). Neste caso, a relutância magnética será mínima, o fluxo no pólo do rotor é máximo e, consequentemente, a reactância do induzido tem o valor máximo (porque ψ=LI e, para a mesma corrente, o fluxo ligado á bobina é máximo quando o coeficiente de auto-indução também é máximo). Na Fig. 7.11(b), o rotor roda de forma que o eixo das cavas coincide com a direcção do campo girante criado pelas corrente no estator; neste caso a relutância magnética será máxima, o fluxo no pólo do rotor é mínimo e, consequentemente, a reactância do induzido é também a mínima.
(a) (b) (c)
Fig. 7.11: Fluxo numa máquina de pólos salientes; (a) segundo o eixo directo; (b) segundo o eixo de quadratura; (c) eixos directo e de quadratura.
Num rotor de pólos salientes, designam-se por eixo directo (ou polar) e de quadratura (ou interpolar), os eixos polares representados na Fig. 7.11(c). Em conformidade, definem-se as reactâncias síncronas no eixo directo, Xd, (ou reactância longitudinal) e no eixo de quadratura, Xq, (ou reactância transversal). Acorrente da armadura, Ia, pode ser decomposta em duas componentes: uma segundo o eixo
q e outra segundo o eixo d da Fig. 7.12. O eixo q coincide com a amplitude complexa OVr
e o
eixo d está em quadratura com OVr
. A reactância síncrona Xq, afecta a componente da
corrente da armadura, Ia, que está em fase com a tensão em vazio, VO, e a reactância síncrona Xd, afecta a componente da corrente que está em quadratura com a tensão em vazio.

Máquinas Eléctricas José Dores Costa
122
Desprezando a resistência do enrolamento, numa máquina de pólos salientes a equação (7.12) toma a forma:
qqddaO jXjX IIVVrrrr
++= (7.21)
Fig. 7.12: componentes nos eixos dq da corrente na armadura.
7.7 Funcionamento em carga
Quando o alternador funciona em carga, da acção entre o campo indutor e a reacção do
induzido resulta um campo girante total que também gira em sincronismo com o rotor: a
fem induzida está associada ao fluxo resultante das correntes no indutor e no induzido.
Como o meio não é linear, o fluxo resultante não pode ser calculado a partir da soma dos
fluxos que as correntes criam isoladamente em cada um dos enrolamentos. Todavia, numa
análise simplificada, e para tensões puramente sinusoidais, pode-se considerar que o fluxo
resultante é função linear da fmm das correntes no induzido. Nestas circunstâncias, o fluxo
no enrolamento do induzido é máximo quando a corrente nesse enrolamento é máxima.
Considera-se que as amplitudes complexas das correntes no induzido formam uma estrela
simétrica; designando por L um coeficiente de indução equivalente dos enrolamentos do induzido, em regime estacionário, e por Ψi o fluxo criado pelo indutor, os fluxos ligados
com os enrolamentos do induzido são dados por:
3
2
33
3
2
22
11
π
π−
Ψ+=Ψ
Ψ+=Ψ
Ψ+=Ψ
j
i
j
i
i
eL
eL
L
rrr
rrr
rrr
I
I
I
(7.22)
Para grandezas alternadas sinusoidais, a fem pode ser escrita em termos das amplitudes complexas:

Máquinas Eléctricas José Dores Costa
123
dt
dΨ−=e → Ψω−=rr
jE (7.23)
Tendo em conta (7.23), de (7.22) obtêm-se as amplitudes complexas das fem induzidas nos enrolamentos do estator:
3
2
33
3
2
22
11
π
π−
Ψω−ω−=
Ψω−ω−=
Ψω−ω−=
j
i
j
i
i
ejLj
ejLj
jLj
rrr
rrr
rrr
IE
IE
IE
(7.24)
Por outro lado, sendo R a resistência dos enrolamentos do induzido, as tensões aos terminais do induzido são dadas por
333
222
111
IEV
IEV
IEV
rrr
rrr
rrr
R
R
R
−=−=
−= (7.25)
Substituindo (7.25) em (7.24), obtém-se
333
2
3
223
2
2
111
IIEV
IIEV
IIEV
rrrr
rrrr
rrrr
LjRe
LjRe
LjR
j
i
j
i
i
ω−−=
ω−−=
ω−−=
π
π− (7.26)
em que
ii j Ψω−=vr
E (7.26a)
é a fem induzida no enrolamento da fase 1 do estator pelo fluxo criado somente pelo enrolamento do indutor (rotor).
De acordo com (7.26), a tensão aos terminais dos enrolamentos do induzido pode ser considerada igual à fem (7.26a) que é induzida, apenas, pelo fluxo indutor (e tendo em conta a desfasagem de 120º entre os enrolamentos do induzido), menos a queda de tensão numa impedância equivalente, que se designou por impedância síncrona. Tendo em conta que em
vazio é iO EVrr
=1 , cada enrolamento do induzido pode ser modelado pelo circuito da Fig.
7.10. Define-se regulação de tensão de um gerador, ∆v, da seguinte forma:

Máquinas Eléctricas José Dores Costa
124
(%)100×−
=∆a
aOV
VVv (7.27)
onde VO é a tensão em vazio e Va é a tensão aos terminais em carga. Uma vez determinadas a resistência R e a reactância síncrona, ∆v pode, em primeira aproximação, ser determinada a partir do circuito da Fig. 7.10. A regulação de tensão de um alternador síncrono pode ser positiva, zero, ou negativa, dependendo do factor de potência e da carga a alimentar. Por exemplo, na Fig. 7.13 representam-se os diagramas vectoriais correspondentes a (7.26), desprezando a resistência R porque, normalmente será R<<Xs, para duas situações de carga: na Fig. 7.13(a) considera-se uma carga de tipo indutiva e na Fig. 7.13(b) considera-se uma carga de tipo capacitiva. Para a carga indutiva verifica-se VO
> Va , e então ∆v>0, e para a carga capacitiva é VO < Va e ∆v<0.
Fig. 7.13: Diagramas vectoriais para o circuito da Fig. 7.10; (a) corrente em atraso; (b)
corrente em avanço.
Os parâmetros do alternador, e os do circuito da Fig. 10, são normalmente expressos em valor por unidade. Como o circuito equivalente da Fig. 10 é monofásico, escolhe-se como tensão base a tensão simples e no restante o cálculo segue o processo do parágrafo 3.6.
Na Fig. 7.14, apresenta-se um diagrama vectorial para um gerador de pólos salientes, com
R=0, correspondente à equação (7.28):
qqddaO jXjX IIVVrrrr
++= (7.28)
Como se referiu, a reactância síncrona Xq, afecta a componente da corrente que está em fase com a tensão em vazio e a reactância síncrona Xd, afecta a componente da corrente que está em quadratura com a tensão em vazio.

Máquinas Eléctricas José Dores Costa
125
Ei
IadI
qI
Ψi
jXq qI
jXd dIVa
a
Vo=
Ψ
Ψ
I
Fig. 7.14: Diagrama vectorial para um gerador com pólos salientes.
Numa máquina de rotor cilíndrico, as reactâncias transversal e longitudinal são aproximadamente iguais. No caso do rotor de pólos salientes, a reactância transversal pode ser 30% a 50% da reactância longitudinal. Considere-se o diagrama vectorial da Fig. 7.15 correspondente a uma máquina de rotor cilíndrico em que se despreza a resistência do enrolamento do induzido. Nesta figura, φ é o ângulo do factor de potência e δ é a desfasagem entre a tensão em vazio e a tensão aos
terminais da carga, isto é, aO VVrr
argarg −=δ ; δ é, frequentemente, designado por ângulo de
potência ou por ângulo de carga.
Ψi
Va
IjXs
I
φ
δVO
φ
O
BA
Fig. 7.15: Diagrama vectorial para um gerador com rotor cilíndrico.
Na Fig. 7.15, o ângulo AÔB é igual a φ porque são ângulos de lados respectivamente
perpendiculares; então, φ=∧δ= cossen IXOBVOB sO e resulta

Máquinas Eléctricas José Dores Costa
126
φ=δ cossen IXV sO (7.29)
ou, de modo equivalente,
s
OX
VI
δ=φ
sencos (7.30)
Multiplicando (7.30) pelo valor eficaz da tensão na carga, Va, e pelo número de fases, conclui-se que a potência activa posta em jogo nos terminais da máquina síncrona com rotor cilíndrico é dada por
δ= sen3s
aOX
VVP (7.31)
Uma primeira conclusão da Fig. 7.15, é que a potência activa posta em jogo na máquina
síncrona é proporcional ao comprimento OB X Is= cosφ ; a segunda conclusão é que a
potência activa desenvolvida pelo gerador é proporcional a sen(δ). Se sen(δ)>0 a máquina
funciona como gerador (P>0); se sen(δ)<0, então é P<0 e a máquina funciona como motor.
O modo de funcionamento da máquina síncrona em função do ângulo δ está resumida na Fig.
7.16.
Fig. 7.16: Funcionamento da máquina de rotor cilíndrico e o ângulo de potência.
Para que o funcionamento da máquina síncrona seja estável é necessário que d
d
P
δ> 0. Por
este facto, o regime estável de funcionamento corresponde a − < <π δ π2 2
, sendo,

Máquinas Eléctricas José Dores Costa
127
ormo02
gerador2
0
t→<δ<π−
→π<δ< (7.32)
A δ
=d
dPPs chama-se potência sincronizante. O seu valor é
δ= cos3s
aOs X
VVP (7.33)
A potência sincronizante desempenha um papel importante na análise da estabilidade do alternador quando funciona em paralelo com a rede. Para se obter a expressão da potência em função do ângulo de carga numa máquina de pólos salientes, consideram-se as figuras 7.14 e 7.15 e conclui-se que,
( )φδ+φδ=φ+δ= .senccos.sen)(sen osIII d (7.34)
( )φδ−φδ=φ+δ= .sensencos.cos)cos( III q (7.35)
Multiplicando (7.34) por sen δ e (7.35) por cos δ, e somando os resultados, obtém-se
δ+δ=φ sencoscos dq III (7.36)
Da Fig. 7.14, resulta:
d
aOd
q
aq X
osVVI
X
VI
δ−=δ= csen (7.37)
Tendo em conta que a potência activa por fase é dada por P=VaI cosφ, substituindo (7.37) em
(7.36) e rearranjando, obtém-se a potência desenvolvida por uma fase numa máquina
síncrona com pólos salientes:
δ
−+δ= 2sen
11
2sen
2
dq
a
d
aO
XX
V
X
VVP (7.38)
A função P(δ) está representada na Fig. 7.17. Admitindo que Xd é constante, a primeira parcela de (7.38) conduz a uma curva semelhante à da Fig. 7.16. Para ambos os casos, a primeira parcela depende de VO, isto é, da fem induzida nos enrolamentos do estator. Esta referência é importante porque a segunda parcela de (7.38) não depende da excitação. Assim,

Máquinas Eléctricas José Dores Costa
128
mesmo na ausência da excitação (VO=0), a máquina de pólos salientes pode desenvolver uma
certa potência quando funciona em paralelo com uma rede (Va≠0).
Fig. 7.17: Potência activa e ângulo de potência da máquina de pólos salientes.
A segunda parcela de (7.38) dá origem a uma deformação da curva da Fig. 7.16. Numa máquina com rotor cilíndrico a máxima potência como alternador é obtida quando δ=π/2; no caso de pólos salientes, devido à segunda parcela de (7.38) a máxima potência é obtida para valores de δ um pouco inferiores a π/2.
A potência total posta em jogo pela máquina síncrona trifásica de pólos salientes obtém-se multiplicando (7.38) por três. Dividindo o resultado pela velocidade angular obtém-se o binário electromagnético da máquina:
δ
−
ω+δ
ω= 2sen
11
2
3sen
3 2
dqr
a
dr
aOXX
V
X
VVT (7.39)
A segunda parcela de (7.39) corresponde ao binário desenvolvido pela saliência dos pólos, e que existe mesmo na ausência da corrente de excitação. A máquina síncrona é uma máquina reversível e funciona como motor ou como gerador em função do ângulo de potência. Note-se que no caso do motor, o sentido da corrente é oposto daquele que foi usado na Fig. 7.10, isto é, a corrente entra no motor para que este receba energia da rede e o vector I
r teria rodado 180º. No caso do gerador, o sentido positivo
adoptado é aquele que sai do induzido.
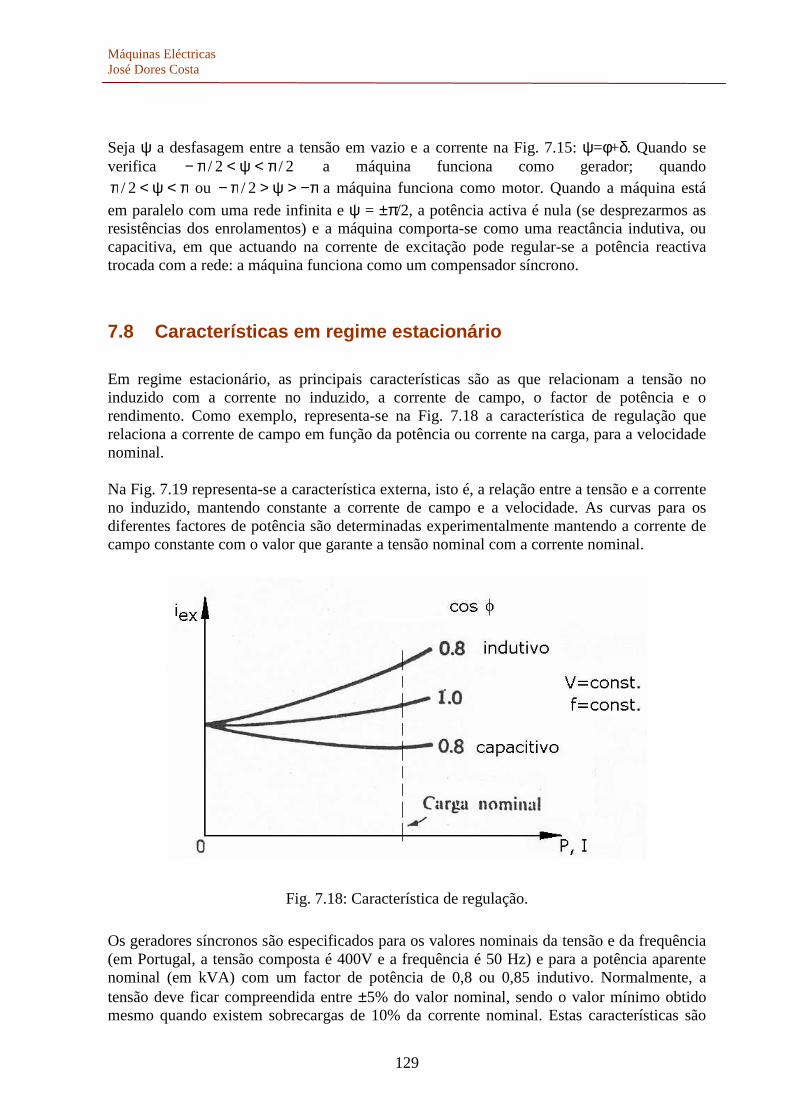
Máquinas Eléctricas José Dores Costa
129
Seja ψ a desfasagem entre a tensão em vazio e a corrente na Fig. 7.15: ψ=φ+δ. Quando se verifica 2/2/ π<ψ<π− a máquina funciona como gerador; quando
π−>ψ>π−π<ψ<π 2/ou2/ a máquina funciona como motor. Quando a máquina está
em paralelo com uma rede infinita e ψ = ±π/2, a potência activa é nula (se desprezarmos as resistências dos enrolamentos) e a máquina comporta-se como uma reactância indutiva, ou capacitiva, em que actuando na corrente de excitação pode regular-se a potência reactiva trocada com a rede: a máquina funciona como um compensador síncrono.
7.8 Características em regime estacionário
Em regime estacionário, as principais características são as que relacionam a tensão no induzido com a corrente no induzido, a corrente de campo, o factor de potência e o rendimento. Como exemplo, representa-se na Fig. 7.18 a característica de regulação que relaciona a corrente de campo em função da potência ou corrente na carga, para a velocidade nominal. Na Fig. 7.19 representa-se a característica externa, isto é, a relação entre a tensão e a corrente no induzido, mantendo constante a corrente de campo e a velocidade. As curvas para os diferentes factores de potência são determinadas experimentalmente mantendo a corrente de campo constante com o valor que garante a tensão nominal com a corrente nominal.
Fig. 7.18: Característica de regulação.
Os geradores síncronos são especificados para os valores nominais da tensão e da frequência (em Portugal, a tensão composta é 400V e a frequência é 50 Hz) e para a potência aparente nominal (em kVA) com um factor de potência de 0,8 ou 0,85 indutivo. Normalmente, a tensão deve ficar compreendida entre ±5% do valor nominal, sendo o valor mínimo obtido mesmo quando existem sobrecargas de 10% da corrente nominal. Estas características são

Máquinas Eléctricas José Dores Costa
130
fornecidas pelos fabricantes e são particularmente importantes para sistemas que funcionam em redes isoladas, como é o caso dos navios. A potência reactiva está limitada pelo aquecimento máximo permitido para os enrolamentos do induzido e do indutor. Note-se que quando o alternador está em paralelo com uma rede alimentada por outros geradores, a potência reactiva depende da corrente de excitação; quanto maior for iex tanto maior será a potência reactiva alimentada pelo alternador.
Fig. 7.19: Características externas.
7.9 Curto-circuito simétrico Quando um gerador síncrono funciona em condições nominais e, subitamente, as suas fases são curto-circuitadas, o comportamento transitório da corrente no estator não pode ser determinado a partir do modelo eléctrico da Fig. 7.10, porque a reactância síncrona que dele faz parte só é válida para o regime estacionário.
A corrente no induzido resultante de um curto-circuito súbito aos terminais do gerador está representada na Fig. 7.20.
No gráfico da Fig. 7.20, distinguem-se três fases:
- uma primeira, de curta duração logo no início do curto-circuito, em que a corrente tem uma amplitude muito elevada, pelo que a reactância dos enrolamentos do induzido é muito baixa; este período é designado por período subtransitório;
- na fase seguinte, a amplitude é menos elevada, pelo que a reactância dos enrolamentos do induzido será maior, e que tem uma duração mais prolongada; este período é designado por período transitório;
- uma fase final em que a corrente estabiliza no valor estacionário de curto-circuito em que é limitada pela impedância síncrona Xs ou por Xd.

Máquinas Eléctricas José Dores Costa
131
Fig. 7.20: Corrente de curto-circuito.
A reactância subtransitória, que limita a corrente na primeira fase, é essencialmente devida à existência dos enrolamentos amortecedores, que equipam os rotores de pólos salientes, e à reactância que limita as correntes no ferro dos rotores cilíndricos. Estes enrolamentos tendem a amortecer as variações da velocidade, mantendo a velocidade de sincronismo constante. A reactância transitória é essencialmente devida à influência do enrolamento de campo. Finalmente, após a anulação dos regimes transitórios anteriores, a corrente de curto-circuito em regime estacionário é limitada pela reactância síncrona e pode ser calculada, por exemplo no circuito da Fig. 7.10, fazendo Va=0.
7.10 Máquinas de relutancia variável.
Como se referiu nos comentários a (7.22), na ausência da excitação, a máquina síncrona trifásica de pólos salientes desenvolve um binário que é dado por,
δ
−
ω= 2sen
11
23
2
dqe
aXX
pVT (7.40)
Em ( 7.40) p é o número de par de pólos e ωe é a pulsação da tensão induzida. Este binário é característico dos sistemas rotativos de relutância variável. O binário depende do quadrado do valor eficaz da tensão aplicada e da diferença entre as relutâncias longitudinal (segundo o eixo d) e transversal (segundo o eixo q), e varia com o seno do ângulo 2δ. Os pólos salientes das máquinas de relutância são constituídos por materiais de baixa relutância de tal forma que Xd/Xq >>1. O motor de relutância possui uma gaiola de esquilo para que possa arrancar por si só. O motor arranca como um motor assíncrono, e ao aproximar-se da velocidade de sincronismo o binário de relutância (7.23) torna-se preponderante e a máquina é puxada para a velocidade de sincronismo, funcionando a partir daí como uma máquina síncrona de pólos salientes sem excitação. Na Fig. 7.21 representa-se esquematicamente uma máquina deste tipo.

Máquinas Eléctricas José Dores Costa
132
Fig. 7.21: máquina síncrona de relutância variável.
Estas máquinas têm um binário de arranque elevado, são robustas e compactas e são principalmente utilizadas como motores síncronos de pequena potência controlados por conversores electrónicos.
7.11 Funcionamento de alternadores em paralelo Quando a potência a alimentar é elevada, a alimentação é feita por vários alternadores ligados em paralelo. Antes de se ligar um alternador em paralelo com outro (ou outros) já em funcionamento, é necessário efectuar-se um conjunto de procedimentos para que se criem as condições favoráveis para que o paralelo se realize de modo estável e sem danos. Primeiro que tudo, é necessário garantir que a sequência de fases do alternador a lançar seja a mesma da rede; esta situação é normalmente testada na fase de ligação do alternador ao quadro eléctrico. Para se efectuar o paralelo, a operação mais usual consiste em: (a) levar o grupo motor-gerador a uma velocidade próxima da de sincronismo, e a garantir a mesma frequência da tensão; (b) ajustar a corrente de excitação para que o valor da tensão do alternador para seja muito aproximadamente igual à tensão do barramento; (c) verificar se as tensões do alternador e da rede estão em fase. Se não se verificarem as condições (b) e (c) ao efectuar-se a ligação, o alternador será percorrido por correntes de intensidade elevada que fará disparar as protecções. Se não se verificar a condição (a), o binário que actuará sobre o rotor pode não ser suficiente para o levar rapidamente à velocidade de sincronismo e o paralelo torna-se instável. Quando as condições (a), (b) são conseguidas, e a sequência de fases é a mesma, no instante em que se verifique a condição (c) fecha-se o disjuntor que o liga o alternador a lançar com o barramento. Depois de feito o paralelo, regula-se a potência activa fornecida à rede através do ajuste da velocidade do motor do grupo e actua-se sobre a corrente de excitação para se ajustar a potência reactiva fornecida pelo alternador. Para além de voltímetros e frequencímetros que indiquem o valor da tensão e da frequência da rede e do alternador a lançar, é também necessário um sincronoscópio (ou um sistema lâmpadas como as designadas por de fogos girantes) para se detectar quando as tensões estão em fase.

Máquinas Eléctricas José Dores Costa
133
Na Fig. 7.22 apresenta-se o esquema de um alternador, com os blocos de regulação da tensão e da frequência, e o sincronoscópio necessário para se efectuar o paralelo com a rede. O sincronoscópio está representado na Fig. 23.
Fig. 7.22: Gerador síncrono ligado à rede.
Fig. 7.23: sincronoscópio.
Na Fig. 7.24, representa-se o esquema multifilar de um alternador sem escovas. A excitatriz é uma máquina síncrona de menor potência montada no mesmo veio e destinada a alimentar o enrolamento do indutor principal. Por sua vez, a corrente de campo da excitratiz é obtida a partir da rectificação das tensões trifásicas.

Máquinas Eléctricas José Dores Costa
134
Fig. 7.24: Esquema de um alternador sem escovas (brushless generator).
A Fig. 7. 25 representa um sistema de controlo da corrente de excitação para regulação do valor eficaz da tensão de saída (tensão do barramento em carga) e da potência reactiva do alternador destinado a funcionar em paralelo com a rede de distribuição.

Máquinas Eléctricas José Dores Costa
135
Fig. 7.25: circuito de regulação da corrente de campo.
O campo indutor da máquina síncrona tem o mesmo número de pólos que o estator, que
podem ser constituído por ímanes permanentes ou por electroímanes alimentados por uma
fonte de corrente contínua – corrente de campo ou corrente de excitação. No caso do campo
excitado por corrente, existem máquinas com escovas e sem escovas. Em qualquer dos casos,
a corrente do rotor dá origem um campo magnético fixo nos pólos do rotor que roda em
sincronismo com o fluxo do estator. O motor síncrono não pode arrancar directamente, a
menos que o rotor tenha enrolamentos amortecedores. Estes enrolamentos servem para
limitar as oscilações do binário e funcionam como uma gaiola de esquilo. Esta gaiola permite
arrancar o motor síncrono como se fosse um motor de indução, e quando a velocidade do
motor atinge aproximadamente 97% da velocidade nominal, o circuito do campo indutor é
lidado, a corrente de campo CC circula nos enrolamentos do rotor e o motor é arrastado até à
velocidade de sincronismo.
Uma das vantagens dos motores síncronos é que permitem regular o factor de potência
através da corrente de campo (ou de excitação). Ao contrário dos motores assíncronos que
funcionam sempre com factor de potência indutivo (em atraso), os motores síncronos podem
funcionar com factor de potência unitário ou até capacitivo (em avanço). O ajuste do factor
de potência é feito através da corrente de campo. Esta situação permite usar a máquina
síncrona como um compensador do factor de potência.
Um motor síncrono rodando em vazio e sobreexcitado, isto é, com a corrente de excitação
acima da que produz uma corrente no induzido com factor de potência unitário, produz uma
potência reactiva de tipo capacitivo que é usada para melhorar o factor de potência e a
regulação de tensão nos barramentos. A máquina funciona então como um condensador
(condensador síncrono).

Máquinas Eléctricas José Dores Costa
136
7.12 Problemas 1.Explique porque numa máquina síncrona se verifica uma relação constante entre a frequência , a velocidade e o número de pares de pólos. 2. Explique como pode regular a potência activa e a reactiva fornecida por um gerador síncrono. 3. Considere um gerador síncrono trifásico tem as características: S=125 kVA, cosΦ=0,8 indutivo, UN=380V, 50Hz, Xs=1,2 Ω/fase. A resistência do induzido é desprezável. a) Para as condições de carga nominais, determine a queda de tensão em %. b) Desenhe o diagrama vectorial nas condições da a). c) Calcule a tensão numa carga de impedância Z=4,8+j2,7Ω, ligada em triângulo, quando a tensão em vazio é a nominal. d) Determine o ângulo de potência δ, nas condições da c). e) Repita as c) e d) para Z=4,8-j2,7Ω. f) Admitindo que Xs'' = 0,15 Ω, determine o valor máximo da corrente de curto-circuito aos terminais do alternador. g) Repita a questão anterior para Xs'' = 0,15 pu.
4. Uma máquina síncrona de rotor cilíndrico funcionando como gerador está ligada a uma rede eléctrica através dum barramento com tensão U=1,0 pu. O circuito eléctrico equivalente em regime estacionário está representado na figura 1, sendo a rede representada pelo seu circuito equivalente de Thevenin. O gerador funciona a plena carga injectando na rede a potência activa P=1 pu. Considerando como referencial a tensão U, calcule (em valores pu):
a) o valor eficaz da corrente na linha I; b) o valor eficaz da fem, E; c) o ângulo de potência no gerador; d) a potência reactiva posta em jogo pelo
gerador.
e) A corrente de campo é reduzida para 72%
do valor anterior e mantém-se a mesma
potência mecânica no veio do gerador.
Considerando a característica do
entreferro, qual é a variação da potência
aparente do gerador?
5. Considere o caso dum gerador síncrono funcionando em paralelo com uma rede.
a) Quais são as condições necessárias para que se possa ligar o gerador síncrono em paralelo com a rede?
b) Uma vez estabelecido o paralelo com a rede, diga quais são as consequências de:
b1) reduzir a velocidade do grupo, mantendo a corrente de campo;
Máquinas Eléctricas José Dores Costa
137
b2) mantendo a velocidade, reduzir a corrente de campo.
6. Um gerador síncrono, 50 Hz, tem um rotor com pólos salientes e as resistências dos enrolamentos do estator são desprezáveis. O gerador encontra-se a fornecer uma corrente 0,75 pu com factor de potência 0,90 indutivo, à tensão e a frequência nominais. As reactâncias do estator são Xd=0,82 pu e Xq=0, 63 pu. Calcule:
a) o ângulo de potência; b) as componentes da directa e quadratura da corrente no induzido; c) o valor eficaz da tensão em vazio; d) a regulação de tensão; e) No sistema de eixos qd, desenhe o diagrama vectorial com as correntes, tensão e fem
induzida no estator.
f) Considerando como valores base a tensão composta de 6,9kV e a potência nominal de 1MVA, calcule os valores das reactâncias em unidades do SI.

Máquinas Eléctricas José Dores Costa
138
CAPÍTULO 8.
TRANSFORMADAS DE CLARKE E DE PARK
8.1 Introdução
Viu-se no Cap. 5 que no estator de uma máquina trifásica, um sistema de correntes trifásicas (8.1) que circulam nas três bobinas desfasadas de 120º dão origem a um campo magnético girante, Br, que roda com velocidade angular ω=2πf. A intensidade do campo magnético girante é constante e é igual a 1,5 vezes a amplitude do campo criado por cada bobina (8.2), tal como se exemplifica na Fig. 8.1 para o instante t.
)3
4cos()(
)3
2cos()(
)cos()(
3
2
1
π−ω=
π−ω=
ω=
tIti
tIti
tIti
m
m
m
(8.1)
3
2)
3
4cos()(
3
2)
3
2cos()(
0)cos()(
3
2
1
π∠π−ω=
π−∠π−ω=
∠ω=
tBt
tBt
tBt
m
m
m
B
B
B
(8.2a)
321 BBBB ++=r (8.2b)
mmr BBB 5,1)º30cos()º30cos(2 == (8.2c)
Fig.8.1: Campo magnético girante criado pelas correntes trifásicas no instante t.

Máquinas Eléctricas José Dores Costa
139
Duas bobinas com planos perpendiculares entre si e que são percorridas por duas correntes desfasadas de 90º também produzem um campo girante. As correntes (8.3) nas bobinas da Fig. 8.2 dão origem a campos magnéticos que têm direcções perpendiculares, a sua resultante é um campo girante que roda com velocidade angular ω=2πf e cuja intensidade é igual à amplitude do campo de cada bobina.
)2
cos()(
)cos()(
2
1
π−ω=
ω=
tIti
tIti
m
m
(8.3)
Fig.8.2: Campo magnético girante criado pelas correntes bifásicas com fase α.
Concluindo: à parte o factor de escala 3/2, os dois sistemas de correntes (com as respectivas bobinas) criam o mesmo campo girante.
8.2 Transformada de Clarke
Considere-se um referencial no plano complexo composto por dois eixos ortogonais sendo um real, α, e outro imaginário, β. Este sistema de eixos em quadratura é o referencial das correntes equivalentes do estator, iα e iβ, que produzam o mesmo campo girante que as correntes trifásicas do estator da máquina (i1, i2, i3).
Definindo um operador de rotação espacial 3
2π
=αj
e , as correntes iα e iβ são obtidas através da transformação das correntes trifásicas equilibradas de (8.1):

Máquinas Eléctricas José Dores Costa
140
( )32
213
2iiiei α+α+ℜ⋅=α (8.4a)
( )32
213
2iiimi α+α+ℑ⋅=β (8.4b)
Substituindo (8.1) em (8.4) e fazendo uso das equações trigonométricas
de (8.4) resulta
( ) 132
213
2iiiiei =α+α+ℜ⋅=α (8.5a)
( ) 2132
213
2
3
1
3
2iiiiimi +=α+α+ℑ⋅=β (8.5b)
As equações (8.5) podem ser escritas na seguinte forma matricial:
⋅
=
β
α
3
2
1
03
2
3
1001
i
i
i
i
i (8.6)
Uma outra transformação, conducente às mesmas correntes iα e iβ, resulta directamente de (8.1). É fácil verificar que o resultado pode ser escrito na forma matricial de (8.7):
⋅
−
−−=
β
α
3
2
1
2
3
2
30
2
1
2
11
3
2
i
i
i
i
i (8.7)
A transformada directa de Clarke transforma um sistema de tensões (ou correntes) trifásicas (1, 2, 3) num sistema bifásico (α, β) com eixos em quadratura. As tensões (ou correntes) trifásicas no estator e as correntes em quadratura, iα e iβ, são todas sinusoidais.
A transformação inversa de Clarke faz com que se volte ao sistema de três eixos 1, 2, 3, trifásicos, a partir das coordenadas α e β. Essa transformação pode ser obtida por:
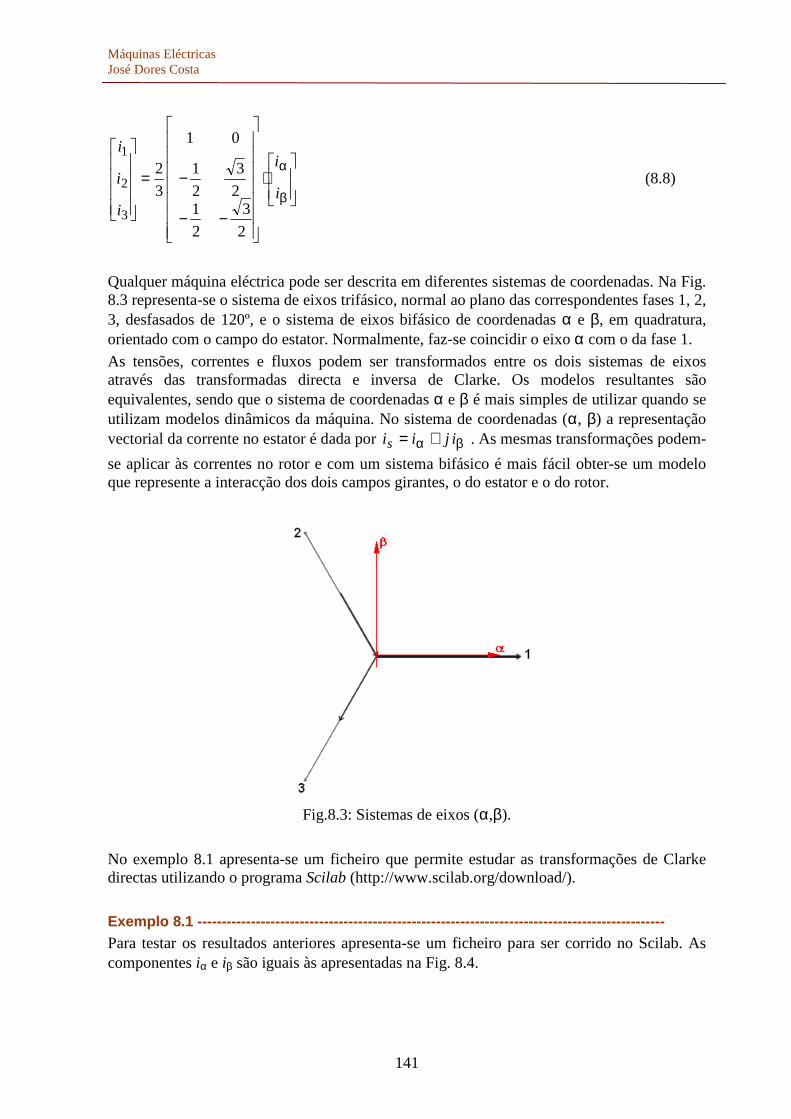
Máquinas Eléctricas José Dores Costa
141
⋅
−−
−=
β
α
i
i
i
i
i
2
3
2
12
3
2
1
01
3
2
3
2
1
(8.8)
Qualquer máquina eléctrica pode ser descrita em diferentes sistemas de coordenadas. Na Fig. 8.3 representa-se o sistema de eixos trifásico, normal ao plano das correspondentes fases 1, 2, 3, desfasados de 120º, e o sistema de eixos bifásico de coordenadas α e β, em quadratura, orientado com o campo do estator. Normalmente, faz-se coincidir o eixo α com o da fase 1. As tensões, correntes e fluxos podem ser transformados entre os dois sistemas de eixos através das transformadas directa e inversa de Clarke. Os modelos resultantes são equivalentes, sendo que o sistema de coordenadas α e β é mais simples de utilizar quando se utilizam modelos dinâmicos da máquina. No sistema de coordenadas (α, β) a representação vectorial da corrente no estator é dada por βα += ijiis . As mesmas transformações podem-
se aplicar às correntes no rotor e com um sistema bifásico é mais fácil obter-se um modelo que represente a interacção dos dois campos girantes, o do estator e o do rotor.
Fig.8.3: Sistemas de eixos (α,β).
No exemplo 8.1 apresenta-se um ficheiro que permite estudar as transformações de Clarke directas utilizando o programa Scilab (http://www.scilab.org/download/).
Exemplo 8.1 --------------------------------------- ---------------------------------------------------------
Para testar os resultados anteriores apresenta-se um ficheiro para ser corrido no Scilab. As componentes iα e iβ são iguais às apresentadas na Fig. 8.4.
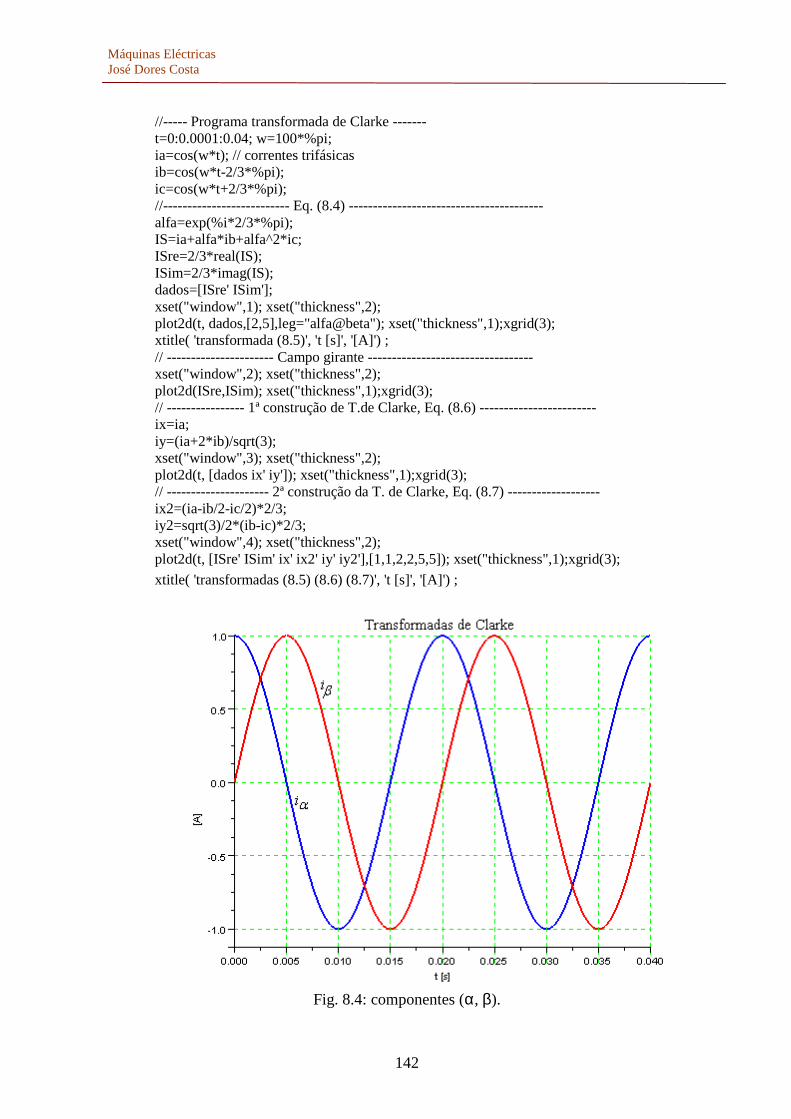
Máquinas Eléctricas José Dores Costa
142
//----- Programa transformada de Clarke ------- t=0:0.0001:0.04; w=100*%pi; ia=cos(w*t); // correntes trifásicas ib=cos(w*t-2/3*%pi); ic=cos(w*t+2/3*%pi); //-------------------------- Eq. (8.4) ---------------------------------------- alfa=exp(%i*2/3*%pi); IS=ia+alfa*ib+alfa^2*ic; ISre=2/3*real(IS); ISim=2/3*imag(IS); dados=[ISre' ISim']; xset("window",1); xset("thickness",2); plot2d(t, dados,[2,5],leg="alfa@beta"); xset("thickness",1);xgrid(3); xtitle( 'transformada (8.5)', 't [s]', '[A]') ; // ---------------------- Campo girante ---------------------------------- xset("window",2); xset("thickness",2); plot2d(ISre,ISim); xset("thickness",1);xgrid(3); // ---------------- 1ª construção de T.de Clarke, Eq. (8.6) ------------------------ ix=ia; iy=(ia+2*ib)/sqrt(3); xset("window",3); xset("thickness",2); plot2d(t, [dados ix' iy']); xset("thickness",1);xgrid(3); // --------------------- 2ª construção da T. de Clarke, Eq. (8.7) ------------------- ix2=(ia-ib/2-ic/2)*2/3; iy2=sqrt(3)/2*(ib-ic)*2/3; xset("window",4); xset("thickness",2); plot2d(t, [ISre' ISim' ix' ix2' iy' iy2'],[1,1,2,2,5,5]); xset("thickness",1);xgrid(3);
xtitle( 'transformadas (8.5) (8.6) (8.7)', 't [s]', '[A]') ;
Fig. 8.4: componentes (α, β).

Máquinas Eléctricas José Dores Costa
143
8.3 Transformada de Park
As componentes α e β calculadas com a transformação de Clarke estão referenciadas ao estator e são duas grandezas em quandratura. Mas é importante que os modelos das máquinas rotativas tenham todas a grandezas com uma referência comum e usualmente escolhe-se o referencial do rotor. Na Fig. 8.5 representa-se o esquema simplificado duma máquina síncrona com os eixos do estator (a, b, c) e (α, β) e os eixos do rotor: d (directo) e q (quadratura).
A utilização do referencial do estator não é a mais adequada para o estudo dinâmico da máquina porque os referenciais giram com velocidade igual à frequência angular das correntes das fases; os referenciais são síncronos com o campo do estator e as componentes em α e β dependem do tempo e da velocidade de rotação. Todavia, estas componentes podem ser transformadas do referencial do estator para um sistema de coordenadas dq que gira na mesma velocidade que a frequência angular das correntes das fases. Com esta transformação, as correntes id e iq passam a ser independentes do tempo e da velocidade, e em regime estacionário são correntes contínuas.
À semelhança do que se fez no §7.9, consideram-se dois eixos dq que são referidos ao campo do rotor e que giram com este: o eixo d do rotor é alinhado com o fluxo do rotor e o eixo q é perpendicular a d, o que se presenta na Fig. 8.5.
Fig.8.5: Esquema simplificado da máquina síncrona e os seus sistemas de eixos.
Sendo θm o ângulo entre o fluxo magnético do estator e o fluxo magnético do rotor (Fig. 8.5), as correntes id e iq obtêm-se a partir das correntes iα e iβ, aplicando a transformação associada

Máquinas Eléctricas José Dores Costa
144
à rotação espacial dos eixos dq do ângulo mecânico (espacial) θm. Definindo o operador
espacial de rotação dos eixos mje θ=φ , da Fig. 8.6 resulta:
mjqd ejiiiji θ−
βα ⋅+=+ )( (8.9)
Fig.8.6: Representação de is nos dois sistemas de eixos.
Desenvolvendo (8.9) obtém-se:
βα ⋅θ+⋅θ= iii mmd sencos (8.10a)
βα ⋅θ+⋅θ−= iii mmq cossen (8.10b)
As equações (8.10) traduzem a transformada de Park que pode ser escrita na seguinte forma matricial:
⋅
θθ
θθ=
β
α
i
i
i
i
mm
mm
q
d
cossen-
sencos (8.11)
A transformada inversa de Park é dada por,
qmdm iii ⋅θ−⋅θ=α sencos (8.12a)
qmdm iii ⋅θ+⋅θ=β cossen (8.12b)
Conhecido θm, quaisquer grandezas dum sistema trifásico (Sa, Sb, Sc) podem ser transformadas no sistema de eixos dq usando sucessivamente a transformada de Clarke e

Máquinas Eléctricas José Dores Costa
145
seguidamente a transformada de Park como se ilustra na Fig. 8.7. A transformação dos eixos (d, q) para os eixos (a, b, c) é feita através das transformadas inversas.
Fig.8.7: Sequencia da transformação dos eixos (a, b, c) para os eixos (d, q).
Uma das vantagens de utilização do referencial dq do rotor é que as fmm são estacionárias em relação ao rotor fictício, motivo pelo qual os coeficientes de indução nos eixos dq são constantes.
Uma generalização da transformada de Park permite que grandezas sinusoidais - tensões, correntes e fluxos - nos eixos (a, b, c) do estator possam ser transformadas directamente para um referencial de eixos dq0 no rotor como grandezas contínuas. Esta operação é realizada pela chamada transformação dq0 que é função do ângulo eléctrico θ formado pelo eixo d do rotor e o eixo a das fases do estator. Numa máquina com p pares de pólos é mpθ=θ . A
terceira componente, 0, é introduzida para se obter uma transformação única das três grandezas do estator.
θ=
c
b
a
q
d
i
i
i
i
i
i
).(
0
T (8.13a)
com
π+θ−π−θ−θ−
π+θπ−θθ
=θ
2
1
2
1
2
1
)3
2sin()
3
2sin(sin
)3
2cos()
3
2cos(cos
3
2)(T (8.13b)
θ=ωt+θ0 (8.13c)

Máquinas Eléctricas José Dores Costa
146
Os valores instantâneos das correntes id, iq e i0 são tais que dão origem a fmm nos eixos dq0 iguais às que são criadas pelas correntes trifásicas do estator.
A transformada dq0 inversa é dada por,
θ=
−
0
1 ).(
i
i
i
i
i
i
q
d
c
b
a
T (8.14a)
com
π+θ−π+θ
π−θ−π−θ
θ−θ
=θ−
1)3
2sin()
3
2cos(
1)3
2sin()
3
2cos(
1sincos
)(1T (8.14b)
Em sistemas simétricos, em que 0=++ cba iii , a transformada pode ser escrita como:
θ=
c
b
a
q
d
i
i
i
i
i).(T (8.15a)
com
π+θ−π−θ−θ−
π+θπ−θθ=θ
)3
2sin()
3
2sin(sin
)3
2cos()
3
2cos(cos
3
2)(T (8.15b)
As equações (8.15) são vulgarmente utilizadas para modelizar o comportamento das máquinas síncronas e assíncronas. É de salientar que as transformações para o referencial do rotor exigem o conhecimento do ângulo do rotor, θm, que varia com o tempo.
8.4 Transformada dq0 num sistema trifásico
A tensão numa bobina com coeficiente de indução L e resistência R como se representa na Fig. 8.8 é dada por,
triv
d
dΨ+= com iL=Ψ (8.16)

Máquinas Eléctricas José Dores Costa
147
Fig.8.8: Circuito RL equivalente a uma bobina.
Num referencial genérico de eixos d-q, as equações correspondentes as (8.16) nesses eixos são:
ddd t
riv
Ψ+=d
d (8.17a)
qqq t
riv
Ψ+=d
d (8.17b)
As equações (8.17) são aplicáveis aos circuitos do estator e do rotor duma máquina trifásica cuja velocidade eléctrica do rotor é ω. Considerando ψ0=0, e a transformada de Park (8.13), obtém-se:
ΨΨΨ
θ=
ΨΨ
c
b
a
q
d).(T (8.18)
As derivadas dos fluxos de (8.17) nos eixos dq podem ser obtidas derivando (8.18). Tendo em conta que θ=ωt+θ0, resulta:
ΨΨΨ
θ+
ΨΨΨ
θ=
ΨΨ
c
b
a
c
b
a
q
d ).().( TT &
&
&
&
&
&
(8.19)
com a representação usual td
dΨ=Ψ& e ωθ
=θθ
=θd
d
d
d
d
d)(
TTT
t& .
Tendo em conta (8.18), o desenvolvimento de (8.19) conduz a
Ψω
Ψω−+
Ψ
Ψ=
Ψ
Ψ
d
q
q
d
q
d
)(
)(
&
&
&
&
(8.20)

Máquinas Eléctricas José Dores Costa
148
com d
d t
Ψ=Ψd
d)( & e
qq t
Ψ=Ψd
d)( & .
Substituindo (8.21) em (8.18), resulta:
qd
dd tirv Ψω−
Ψ+=
d
d (8.21a)
dq
qq tirv Ψω+
Ψ+=
d
d (8.21b)
As equações (8.21) são as equações gerais num referencial genérico dq. Com base nelas, obtêm-se modelos mais simples das máquinas síncronas e assíncronas considerando referenciais alinhados com os fluxos do rotor, Fig. 8.5, do que os modelos baseados nas tensões e correntes das fases
As equações do tipo de (8.22) podem ser completadas com as equações da potência e do binário das máquinas trifásicas. Considere-se um sistema de tensões e correntes trifásicas com valores instantâneos na forma de (8.1) no estator duma máquina trifásica. A potência instantânea no estator é dada por
332211 ivivivp ++= (8.22)
Aplicando a transformada dq0 (3.5) a (4.7), resulta
)2(2
300ivivivp qqdd ++= (8.23)
O binário electromagnético de uma máquina com p pares de pólos resulta da divisão de (4.8) pela velocidade eléctrica do rotor, ω; substituindo (8.22) em (8.24), para o sistema trifásico simétrico, resulta:
)(2
3dqqdem iipT Ψ−Ψ= (8.24)
Da equação (8.25) é interessante verificar que o binário é produzido pelos fluxos e as correntes que se encontram em quadratura.
As equações (8.22) e (8.25) estão na base dos modelos dinâmicos das máquinas eléctricas trifásicas [1-3].
Máquinas Eléctricas José Dores Costa
149
8.5 Bibliografia:
[1] A.E. Fitzgerald, C. Kingsley, S.D. Umans, Electric Machinery, McGraw-Hill, 6ª Ed.
[2] Francesco Orsi, Studio del Modelo Dinamico del Motor Asincrono, Mathcad Library, http://www.mathcad.com/Library/LibraryContent/MathML/mod3.htm
[3] Stephen J. Chapman, Electric Machinery Fundamentals McGraw-Hill, 5th Edition, 2011