aplicaci on del m etodo de diferencias finitas en el ... · pdf fileimportante, ya que a...
TRANSCRIPT

Aplicacion del Metodo de Diferencias
Finitas en el Dominio del Tiempo
(MDFDT) para Simulaciones en
Electromagnetismo usando Matlab
Informe de Topicos de Investigacion IRoger Garay Avendano
Universidad Nacional de IngenierıaFacultad de Ciencias
Asesor: Solano

Indice general
1. Introduccion 3
2. Fundamento Teorico 42.1. Ecuaciones de Maxwell . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1.1. Ecuaciones de Maxwell para medios homogeneos, lineales,isotropicos y sin carga . . . . . . . . . . . . . . . . . . . . 4
2.2. Diferencias finitas . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.2.1. Discretizacion de ecuaciones diferenciales hiperbolicas me-
diante diferncias finitas . . . . . . . . . . . . . . . . . . . 62.2.2. Aproximacion de los operadores diferenciales mediante di-
ferencias finitas. Caso de una variable . . . . . . . . . . . 82.2.3. Aproximacion de los operadore difernciales mediante di-
ferncias finitas. Generalizacion a varias variables . . . . . 122.3. El metodo FDTD . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3.1. Las ecuaciones de Maxwell en forma discreta (discretiza-cion) para una onda que se propaga en el vacio en direc-cion z con una polarizacion paralela al eje x . . . . . . . . 13
2.3.2. Criterio de estabilidad . . . . . . . . . . . . . . . . . . . . 162.3.3. El algoritmo computacional MDFDT . . . . . . . . . . . . 16
3. Parte Experimental 193.1. Simulacion de un campo electromagnetico pulso gausiano sin con-
diciones de frontera . . . . . . . . . . . . . . . . . . . . . . . . . 193.1.1. Implementacion en Matlab . . . . . . . . . . . . . . . . . 203.1.2. Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.2. Simulacion de un campo electromagnetico pulso gausiano concondiciones de frontera absorventes . . . . . . . . . . . . . . . . 233.2.1. Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4. Discucion de Resultados 264.1. Simulacion de un campo electromagnetico pulso gausiano sin con-
diciones de frontera . . . . . . . . . . . . . . . . . . . . . . . . . 264.2. Simulacion de un campo electromagnetico pulso gausiano con
condiciones de frontera absorventes . . . . . . . . . . . . . . . . 26
5. Conclusiones 27
6. Referencia Bibliografica 28
1
7. Apendice A 29
8. Apendice B 35
9. Apendice C 38
2

Capıtulo 1
Introduccion
3

Capıtulo 2
Fundamento Teorico
2.1. Ecuaciones de Maxwell
El formalismo basico para describir los fenomenos electromagneticos relacio-nados con la optica ondulatoria son las ecuaciones de Maxwell. En el sistemaceentimetro-gramo-segundo (CGS Gauss) se escriben como:
∇χ~E = −1c
∂ ~B
∂t(2.1)
∇χ ~H =1c
∂ ~D
∂t+
4π~jc
(2.2)
∇. ~D = 4πρ (2.3)
∇. ~B = 0 (2.4)
donde ~H es la intensidad de campo magnetico, ~E es el campo electrico, ~D esel desplazamiento electrico, ~B es la induccion magnetica, ~j es la densidad decorriente de conduccion y debida a las fuentes, ρ es la densidad de carga y ces una constante de proporcionalidad. Las ecuaciones (2,1) y (2,2) se conocencomo la ecuacion de Faraday y la ecuacon de Ampere-Maxwell, respectivamente.
Los campos ~E y ~B se consideran magnitudes fundamentales. Los campos ~D, ~Hy ~j son magnitudes macroscopicas que dan cuenta de la respuesta del medioa la presencia del campo electromagnetico. Estos dos grupos de magnitudes serelacionan entre si mediante las relaciones de contitucion,
~D = ~D( ~E, ~B), ~H = ~H( ~E, ~B),~j = ~j( ~E, ~B) (2.5)
Los parentisis en la ecuacıon anterior indican que la relaciones entre las distintasmagnitudes no son necesariamente simples y pueden depender de la historiapasada (histerisis), pueden ser no lineales, etc.
2.1.1. Ecuaciones de Maxwell para medios homogeneos,lineales, isotropicos y sin carga
Al tratar con medios homogeneos, lineales, isotropicos y sin carga las relacio-nes de contitucion, introducidas en (2,5), y expresadas en el dominio del tiempo
4

quedan:
~D = ε ~E, ~B = µ ~H,~j = σ ~E (2.6)
donde ε es la constante dielectrica, µ es la permeabilidad magnetica y σ es laconductividad electrica. Como no existen fuentes de carga ni de corriente ρ = 0,σ = ~j = 0, ε y µ son constantes. Las ecuaciones se simplifican:
∇χ~E = −µc
∂ ~H
∂t(2.7)
∇χ ~H =ε
c
∂ ~E
∂t(2.8)
∇. ~D = 0 (2.9)
∇. ~B = 0 (2.10)
Cuando un campo electromagnetico cambia de medio, las componentes norma-les y tangenciales de este verifican las relaciones siguientes []:
Componentes normales: ~n( ~D2 − ~D1) = 4πρs; ~n( ~B2 − ~B1) = 0
Componentes tangenciales: ~nx( ~E2 − ~E1) = 0 ; ~nx( ~H2 − ~H1) = 4πc~j
donde ~n es el vector normal a la superficie de separacion entre los dos medios, yρs y ~js son las densidades superficiales de carga y de corriente, respectivamente.Los subındices 1 y 2 hacen referencia a los campos en el medio original y en elmedio en el que se transmiten los campos, respectivamente. Si las densidades decarga y corriente son cero, ρs = 0 y ~js = 0, entonces se verifican las relacionesde continuidad siguientes:
Componentes normales:
Dn2 = Dn
1
Bn2 = Bn1 (2.11)
Componentes tangenciales:
Et2 = Et1
Ht2 = Ht
1 (2.12)
Los superındices n y t hacen referencia a las componentes normales o tangen-ciales. Las ecuaciones en (2,11) nos dicen que las componentes normales delvector desplazamiento y de las de inducion magneticas permanecen constantesal atravesar la superficie de separacion entre los dos medios, de igual forma lasecuaciones en (2,12) ponen en manifiesto que las componentes tangenciales delcampo electrico y de las de intensidad magnetica se conservan al atravesar lasuperficie de separacion entre los dos medios.
5

2.2. Diferencias finitas
Las ecuaciones de Maxwell que acabamos de presentar estan englobadasden-tro de un tipo de ecuaciones diferenciales denominadas ecuaciones hiperbolicasEn este apartado se exponen los conceptos basicos concernientes a la teorıa deaproximacion de operadores diferenciales (por ejemplo las derivadas parcialesque aparecen en las ecuaciones de Maxwell) mediante diferencias finitas.
2.2.1. Discretizacion de ecuaciones diferenciales hiperboli-cas mediante diferncias finitas
De forma general, una ecuacion en derivadas parciales puede expresarse co-mo:
f(x, y, z, t, U,∂U
∂x,∂U
∂y, ...,
∂2U
∂x2,∂2U
∂y2, ...) = 0,
donde U = U(x, y, z, t) es una funcion multidimensional dependiente de x,y,z,tque representan, respectivamente, las tres direcciones del espacio y del tiempo.La funcion f, por su pate dependera, al menos de una de las derivadas parcialesindicadas. El orden de la ecuacion diferencial sera aquel que corresponda a laderivada parcial de mayor orden.
Cuando nos plantemos resolver una ecuacion diferencial, ademas de la propiaecuacion es necesario considerar unas condiciones iniciales y/o de contorno. Es-tas condiciones auxiliares junto con la ecuacion deben costituir un problemabien propuesto, es decir, es necesario garantizar la existencia y unicidad de lasolucion.
Como ya hemos considerado, para la resolucion del problema utilizaremos elmetodo de diferncias finitas. Este metodo es una tecnica numerica de tipo dis-creto en la que la ecuacion diferencial continua inicial se resuelve de formaaproximada en un conjunto finito de puntos localizados en el dominio donde sedesea encontrar la solucion. Es decir, pasamos de un problema continuo a otrodiscreto. Estos puntos se suelen identificar como los nudos de una red o mallaque se utiliza para subdividir la region del espacio problema. En la figura 2.1puede verse un esquema en el que una region espacio-temporal es discretizadamediante una malla.
La estrategia del MDFDT consiste en cambiar los valores continuos de la coor-denada espacial (x, y, z) por valores discretos indexados por los numeros enteros(i, j, k) de forma que los valores espaciales son obtenidos por medio de las ecua-ciones x = i∆x,y = j∆y,z = k∆z y similarmente para los valores discretos dela ccoredenada temporal los cuales estaran indexados por el numero entero ncon la relacion t = n∆t y por lo tanto un punto ge’erico en una malla espacio-temporal de tres dimensiones espaciales se denotara por
(x, y, z, t) = (i∆x, j∆y, k∆z, n∆t) ≡ (i, j, k, n) (2.13)
6

Figura 2.1: Discretizacion de la region espacio-temporal de ınteres mediante unamalla
donde ∆x ∆y ∆z son las dimenciones de la celda espacial unidad y ∆t es elpaso temporal. De manera analoga, cualquier funcıon del espacio y del tiempose denotara por
U(x, y, z, t) = U(i∆x, j∆y, k∆z,∆t) ≡ Un(i, j, k, n)
En este proceso de discretizacion los parametros de la malla juegan un papel muyimportante, ya que a medida que estos pa’rametros disminuyen, el dominio de lasolucion discreta tiende al dominio de la solucion continua, o en otras palabras,
7

la solucion del problema algebraıco tiende a la solucion del problema diferencial.
La solucion en cada uno de los nudos de la malla se calcula aproximando losoperadores difernciales de la ecuacion por operadores en diferncias, por ello, enla siguiente seccion mostraremos la teorıa que permite realizar dichas aproxi-macion.
2.2.2. Aproximacion de los operadores diferenciales me-diante diferencias finitas. Caso de una variable
El fundamento matematico de los metodos de diferncias finitas es el desa-rrollo de una funıon en serie de potencias descubiertos por Taylor en 1915. Estedesarrollo permite predecir el comportamiento global de una funcion con tansolo conocer el valor de la funcion y de todas sus derivadas en un punto. Eldesarrollo en serie de Taylor de una funcion monoevaluada, finita y continua,U(x), vale
U(x+α∆x) = U(x)+α∆x
1!dU(x)
dx+
(α∆x)2
2!d2U(x)
dx2+ ...+
(α∆x)n
n!dnU(x)
dxn+ ...
(2.14)
Esta expresion evalua la funcion en el punto x + α∆x a partir de los valo-res de la funcion y sus derivadas en el punto x.
A partir de este desarrollo, se obtiene las expresiones en diferencias finitas quepermiten calcular el valor de una funcion o sus derivadas en un punto:
Aproximacion de la primera derivada mediante diferncias finitas por laderecha:
Si en (2.1) tomamos α = +1/2 y despejamos el termino de la primeraderivada tenemos
dU(x)dx
=U(x+ ∆x/2)− U(x))
∆x/2− 1
2!∆x2
d2U(x)dx2
− 13!
(∆x2
)2d3U(x)
dx3...
(2.15)
Si ahora agrupamos terminos
dU(x)dx
=U(x) + U(∆x/2)
∆x/2+O(∆x), (2.16)
donde o(∆xn) denota los terminos que contienen las potencias de ∆x
8

de orden n o de superiores. Si suponemos que ∆x es lo suficientemente pe-queno como para que los terminos o(∆x) se puedan despreciar, se obtienela expresicion que permite calcular la primera derivada de una funcionutilizando diferencias finitas
dU(x)dx
≈ U(x) + U(∆x/2)∆x/2
. (2.17)
Esta aproximacion e la primera derivada mediante diferncias finitas se co-noce como aproximacion hacia adelante o por la derecha. Ademas, puestoque el primer termino de o(∆x) tiene dependencia con ∆x, diremos queesta aproximacion de la derivada presenta un eror de truncamiento de pri-mer oren.
Aproximacion de la primera derivada mediante diferncias finitas por laizquierda:
Si en (2.1) tomamos α = −1/2 y volvemos a despejar el termino de laprimera derivada
dU(x)dx
=U(x)− U(x−∆x/2)
∆x/2+
12!
∆x2
d2U(x)dx2
− 13!
∆x2
2 d3U(x)dx3
...
(2.18)
o en su forma reducida
dU(x)dx
=U(x)− U(x−∆x/2)
∆x/2+O(∆x), (2.19)
Al igual que antes, si despreciamos el termino o(∆x).
dU(x)dx
≈ U(x)− U(x−∆x/2)∆x/2
. (2.20)
La ecuacion (2.7) se conoce como aproximacion de la primera derivadahacia atraz o por la izquierda. Al igual que en el caso anterior, esta apro-ximacion representa un error de truncamiento de primer orden.
Aproximacion de la primera derivada mediante diferencias finitas centra-das:
9

Si ahora sumamos (2.2)y(2.5) obtenemos
∂U(x)∂x
=U(x+ ∆x/2)− U(x−∆x/2)
∆x− 1
3!∆x2
d3U(x)dx3
− 15!
∆x2
4 d5U(x)dx5
...
(2.21)
En forma compacta, la ecuacion anterior se puede poner como
dU(x)x
=U(x+ ∆x/2)− U(x−∆x/2)
∆x+O(∆x2), (2.22)
Si nuevamente asumimos que ∆x es lo suficientemente pequeno, pode-mos encontrar la relacion buscada
dU(x)dx
≈ U(x+ ∆x/2)− U(x−∆x/2)∆x
. (2.23)
La ecuacion (2.10) se conoce como aproximacıon de la primera deriva-da mediante diferncias finitas centradas. Puede apreciarse que se trata deuna aproximacion centrada, ya que involucra valores de la funcion tanto ala derecha, U(x+∆x/2), como a la izquierda,U(x−∆x/2), del punto en elque se desea calcular la derivada.Otra diferncia importante repecto a lasdos aproximaciones anteriores es que, debido a la presencia de o(∆x2) en(2.9), estas aproximaciiones presentan un error de truncamiento de segun-do orden. Debido a lo anterior, si queremos aproximar la primera derivadade una funcion mediante diferncias finitas, esta aproximaci’on proporcionamejores resultados que las dos anteriores.
Si definimos ahora el operador finito diferncia centrada δ como
δU(x) ≡ U(x+∆x2
)− U(x− ∆x2
) (2.24)
podemos expresar () de una forma mas compacta y compresinble
dU(x)dx
=δU(x)
∆x+O(∆x2). (2.25)
Como se observa en la figura (2,2), esta aproximacion, que geometrıca re-presenta la pendiente de la recta que pasa por los puntos A y B, tendra ala solucion exacta a medida que disminuya el valor del incremento de lavariable independiente ∆x, ya que la derivada, dU(x)/dx se corresponde
10

Figura 2.2: Interpretacion grafica de la derivada y su aproximacion usando di-ferencias finitas centradas
graficamente con la pendiente de la recta tangente a la curva.
• Aproximacion de una funcion en un punto mediante diferncias finitas
Puede que en un momento determinado nos interese calcular el valorde la funcion en un punto, el cual no podemos conocer explicitamen-te. Si restamos (2.2)y(2.5) obtenemos
U(x) =U(x+ ∆x/2)− U(x−∆x/2)
2− 1
2!(∆x2
)2d2U(x)
dx2− 1
4!(∆x2
)4d4U(x)
dx4−...
(2.26)
Definimos ahora el operador finito promedio centrado µ como
µU(x) ≡ 12
[U(x+∆x2
)− U(x− ∆x2
)] (2.27)
podemos expresar () de forma compacta como
µU(x) = µU(x) +O(δx2) (2.28)
11

Al igual que la aproximacion de la derivada mediante diferncias finitascentradas, esta aproximacion tambien presenta un error de trunca-miento de segundo orden.
Debido a que presentan un error de truncamiento de segundo or-den, para desarrollar el metodo FDTP convencional, vamos a haceruso de los operadores finitos diferncia y promedio centrado
δU(x) ≡ U(x+∆x2
)− U(x− ∆x2
) (2.29)
µU(x) ≡ 12
[U(x+∆x2
)− U(x− ∆x2
)] (2.30)
2.2.3. Aproximacion de los operadore difernciales median-te diferncias finitas. Generalizacion a varias varia-bles
La teorıa desarrollada para funciones de una variable puede extenderse deforma directa al caso de funciones de varias variables sin mas que considerar eldesarrollo de Taylor para estas ultimas. En la practica, interesa obtener apro-ximaciones para la derivada parcial respecto de alguna variable manteniendo elresto constante. Esto sw puede hacer aplicando la correspondiente aproximacionen diferencias finitas segun la direccion en la que se realize la derivacion. Paradistinguir en que direci’on es aplicada la aproximacion, anadiremos un subındiceque lo indique, Por ejemplo la derivada parcial en la direcion x de la funcionU(x, y, z, t) se puede aproximar por:
∂U(x)∂x
=U(x+ ∆x/2, y, z, t)− U(x−∆x/2, y, z, t)
∆x+O(∆x2) ' δxU(x, y, z, t)
∆x(2.31)
Donde δx es el operador diferncial centrada aplicado a la variable x.
2.3. El metodo FDTD
hhhhhhhhhh
12

2.3.1. Las ecuaciones de Maxwell en forma discreta (dis-cretizacion) para una onda que se propaga en elvacio en direccion z con una polarizacion paralelaal eje x
Consideraremos que las ondas se propagan en un medio homogeneo y que noexisten fuentes de carga ni de corriente (ρ = J = 0) las ecuaciones de Maxwellen estas condiciones serıan las dadas por las ecuacion (2,7)-(2,10). Si ademasescogemos una polarizacion tal que el campo electrico ( ~E) sea paraelo al ejex y que la onda se propage en la direcion z, es decir el vector de onda ( ~K)sera paralelo al eje z, entonces el campo magnetico ( ~H) estaa en el eje y comose puede apreciar en la figura (2,2) Las ecuaciones rotacionales de Maxwell vistas
~E = Exi
~H = Hy j
~K = Kz k
Figura 2.3: Transversalidad de los campos electrico y magnetico y su localizacionen el espacio
en (2,7) y (2,8) pueden desglosarse en sus componentes cartesianas, es decir:
∇χ~E = −µc
∂ ~H
∂t∣∣∣∣∣∣i j k∂∂x
∂∂y
∂∂z
Ex 0 0
∣∣∣∣∣∣ = −µc
∂ Hy j
∂t
∂Exj
∂z= −µ
c
∂ Hy j
∂tEx(z, t)∂z
= −µc
∂ Hy(z, t)∂t
∂Hy(z, t)∂t
= − cµ
∂Ex(z, t)∂z
(2.32)
13

y tamben
∇χ ~H = −εc
∂ ~E
∂t∣∣∣∣∣∣i j k∂∂x
∂∂y
∂∂z
0 Hy 0
∣∣∣∣∣∣ = −εc
∂ Exi
∂t
∂Hy i
∂z= −ε
c
∂ Exi
∂tHy(z, t)∂z
= −εc
∂ Ex(z, t)∂t
∂Ex(z, t)∂t
= − cε
∂Hy(z, t)∂z
(2.33)
Ambas ecuaciones (2,31) y (2,32) son ecuaciones diferenciales puntuales, es decirque son validas para cada valor continuo del espacio y tiempo. Para lograr unaformulacion discreta, aproximamos las derivadas espacial y temporal por surepresentacion en diferncias finitas y de acuerdo con la ecuacion (2,13) paranuestro caso en que la onda electrogmagnetica se desplaza en un sola dirrecion,eje z, esta se reducirıa a
(z, t) = (k∆z, n∆t)
Con estas consideraciones, la forma discreta de la derivada espacial para laintensidad magneticas ( ~H) en la ecuacion (2,33) es
∂
∂zHx(k∆z, n∆t) ' Hx[(k + 1/2)∆z, n∆t]−Hx[(k − 1/2)∆z, n∆t]
∆t' δzH
nx (k)
∆z(2.34)
Donde, recordemos, δz es el operador finito diferncia centrada definido en (2,21)aplicado a z. Similarmente, la forma discreta temporal para el campo electrico( ~E) es
∂
∂tEx(k∆z, n∆t) ' Ex[k∆z, (n+ 1/2)∆t]− Ex[k∆z, (n+ 1/2)∆t]
∆z' δtH
nx (k)
∆t(2.35)
Donde δt es el operador finito centrada aplicado al tiempo. Al remplazar (2,34)y (2,35) en la ecuacion (2,33) obtenemos
∂
∂tEx(k∆z, n∆t) = − c
ε
∂
∂zHy(k∆z, n∆t)
δtHnx (k)
∆t= − c
ε
δzHnx (k)
∆zEn+1/2x (k)− En−1/2
x (k)∆t
= − cε
Hny (k + 1/2)−Hn
y (k − 1/2)∆z
En+1/2x (k) = En−1/2
x (k)− c∆tε
(Hny (k + 1/2)−Hn
y (k − 1/2)∆z
) (2.36)
en (2,36) se puede comprobar como Ex en un cierto punto y en un instante de-terminado se puede calcular a partir del valor que tenıa en el insatante anteriory de los valores de las componentes de la itensidad magneticas a su alrededor.
14

Para obtener la forma discreta de la ecucion (2,32) vamos a considerar las deri-vadas en el punto (z + ∆z/2, t+ ∆t/2) y tendrıamos:
(z+ ∆z/2, t+ ∆t/2) = (k∆z+ ∆z/2, n∆t+ ∆t/2) = [(k+ 1/2)∆z, (n+ 1/2)∆t]
Con estas consideraciones, la forma discreta de la derivada espacial para laintensidad magneticas ( ~E) en la ecuacion (2,33) es
∂
∂zEx[(k + 1/2)∆z, (n+ 1/2)∆t] ' Ex[(k + 1)∆z, (n+ 1/2)∆t]− Ex[(k)∆z, (n+ 1/2)∆t]
∆z
=δzE
n+1/2x (k + 1/2)
∆z(2.37)
Donde, recordemos, δz es el operador finito diferncia centrada definido en(2,21) aplicado a z. Similarmente, la forma discreta temporal para el campomagnetico ( ~H) es
∂
∂tHy[(k + 1/2)∆z, (n+ 1/2)∆t] ' Hy[(k + 1/2)∆z, (n+ 1)∆t]−Hy[(k + 1/2)∆z, (n)∆t]
∆t
=δtH
n+1/2y (k + 1/2)
∆t(2.38)
Donde δt es el operador finito centrada aplicado al tiempo. Al remplazar (2,34)y (2,35) en la ecuacion (2,33) obtenemos
∂
∂tHy[(k + 1/2)∆z, (n+ 1/2)∆t] = − c
µ
∂
∂zEx[(k + 1/2)∆z, (n+ 1/2)∆t]
δtHn+1/2y (k + 1/2)
∆t= − c
µ
δzEn+1/2x (k + 1/2)
∆z
Hn+1y (k + 1/2)−Hn
y (k + 1/2)∆t
= − cµ
En+1/2x (k + 1)− En+1/2
x (k)∆z
Hn+1y (k + 1/2) = Hn
y (k + 1/2)− c∆tµ
(En+1/2x (k + 1)−Hn+1/2
x (k)∆z
) (2.39)
Al considerar la ecuacion (2,33) en el punto (z, t) y la ecuacion (2,32) en el punto(z+∆z/2, t+∆t/2) logramos describir una situacion en donde los campos estanintercalados y segun las ecuaciones (2,36) y (2,39) tenemos:
En+1/2x (k) = En−1/2
x (k)− c∆tε∆z
[Hny (k + 1/2)−Hn
y (k − 1/2)] (2.40)
Hn+1y (k + 1/2) = Hn
y (k + 1/2)− c∆tµ∆z
[En+1/2x (k + 1)− En+1/2
x (k)] (2.41)
Si se observa detenidamente (2,40), se puede comprobar como el campo En+1/2x (k)
es inducido por el valor del campo un paso anterior En−1/2x (k) mas la contribu-
cion de los campos magneticos Hny (k+ 1/2) y Hn
y (k− 1/2). Estos campos estanen puntos espaciales contiguos y un medio tiempo espacial anterior. Esta formade escribir las ecuaciones de Maxwell es ilustrada en la Figura (2,3)
15

Figura 2.4: Representacion de la evolucion espacio-temporal de un campo elec-tromagnetico.
2.3.2. Criterio de estabilidad
La discretizacion de la malla debe ser tal que los campos electromagneticosno cambien sustancialmente de un nodo a otro de la grilla. Esto siginfica que paratener resultados significativos la dimension de la grilla debera ser una fraccionde la longitud de onda λ. Una onda electromagnetica necesita un minimo detiempo para propagarse dentro de la malla discreta espaciada ∆z. Si tomamosun paso temporal mas grande, la onda ya habrıa pasado la distancia ∆z y yano estarıa en nuestra malla de simulacion.
∆t ≤ ∆zc
(2.42)
Para este trabajo vamos a utilizar la convencion de escoger un paso temporal:
∆t =∆z2c
(2.43)
Los articulos consultados recomiendan de forma unanime un paso menor o iguala λ/10, por lo tanto el paso espacial lo escogemos tomando 10 puntos de lalongitud de onda de la luz en el vacio λ0:
∆z =λ0
10(2.44)
2.3.3. El algoritmo computacional MDFDT
Como ya hemos visto el MFDT da lugar a un algoritmo de tipo interactivoy evolutivo. Si conocemos los campos en un instantes de tiempo dado podremos
16

calcular su valor en instantes de tiempo posteriores mediante las ecuacionesconvencionales del MFDTD obtenidas. Este algoritmo, que se muestra de formaesquematica en la figura (), se puede resumir en los siguientes pasos:
1. Planteamiento del problema. Definicion de la estructura. Inicializacion devariables.
2. Una vez definida la estructura, calculo del tamao de las celdas (∆z) y delincremento del tiempo, (∆t). Preprocesado de datos.
3. Exitacion de la estructura.
4. Comienza el bucle temporal con el algoritmo iteractivo. Este algoritmoconsta, para cada instante de tiempo y para todos los puntos espaciales,de los siguientes pasos:
a) Primera fila del segundo ambiente
b) Segunda fila del segundo ambiente
Figura 2.5: Diagrama de bloques del algoritmo MDFDT.
5. Una vez terminado el nucleo iterativo, se realiza el post-procesado de losdatos para obtener la informacion deseada en nuestro caso una grafica
17
Desde el punto de vista de la implementacion del algoritmo en un ordenador,conviene almacenar los campos en arrays (arreglos), por lo que sera necesariodefinir los ındices para que sean todos enteros. Haciendo los cambios:
18
Capıtulo 3
Parte Experimental
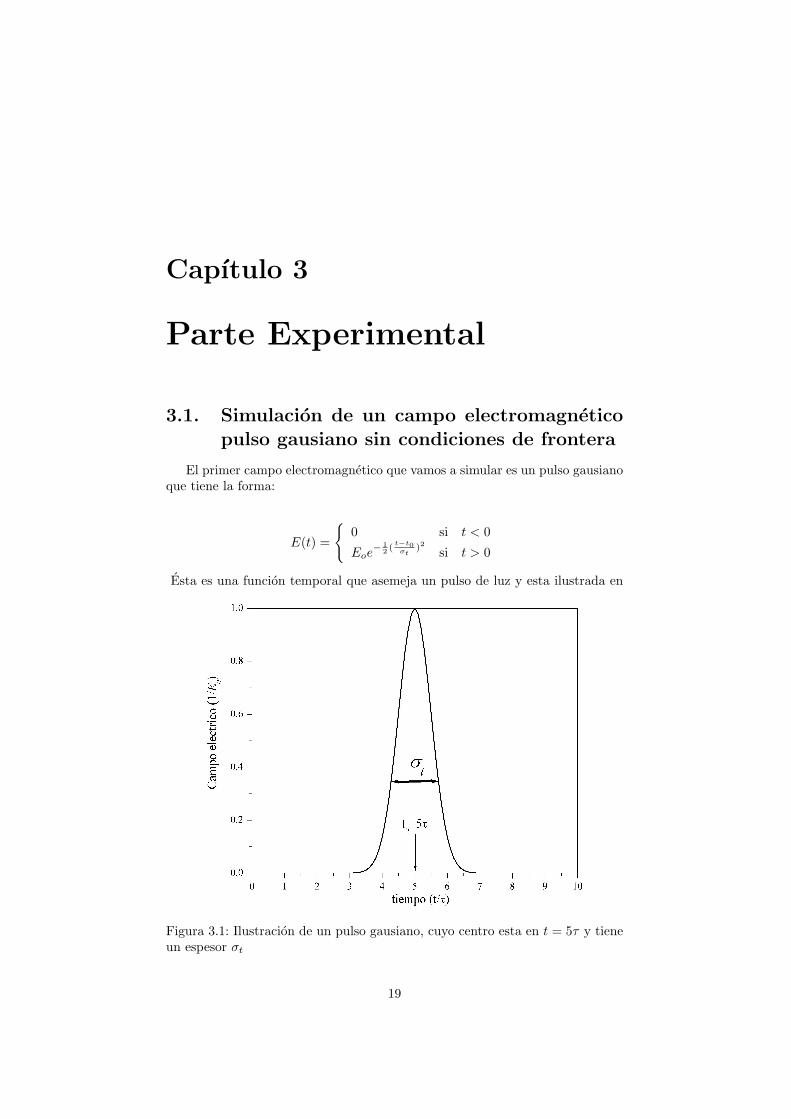
3.1. Simulacion de un campo electromagneticopulso gausiano sin condiciones de frontera
El primer campo electromagnetico que vamos a simular es un pulso gausianoque tiene la forma:
E(t) =
{0 si t < 0
Eoe− 1
2 (t−t0σt
)2 si t > 0
Esta es una funcion temporal que asemeja un pulso de luz y esta ilustrada en
Figura 3.1: Ilustracion de un pulso gausiano, cuyo centro esta en t = 5τ y tieneun espesor σt
19

la figura (3,1). Tiene la caraterıstica de que su amplitud maxima es Eo. Solotoma valores diferntes de cero en la vecindad de to, tiempo al cual esta centraday tiene una duracion media σt
3.1.1. Implementacion en Matlab
Remplazando las condicion de la ecuacio (2,43) en las ecuaciones (2,40) y(2,41) y recordando que estamos trabando en el vacıo, es decir, la funcion die-lectrica y la permeabilidad magnetica son iguales a 1; ε = µ = 1, obtenemos:
En+1/2x (k) = En−1/2
x (k)− 0,5[Hny (k + 1/2)−Hn
y (k − 1/2)] (3.1)
Hn+1y (k + 1/2) = Hn
y (k + 1/2)− 0,5[En+1/2x (k + 1)− En+1/2
x (k)] (3.2)
La implementacion de las ecuaciones (3,1) y (3,2) en un algoritmo compu-tacional requiere dos vectores unidimensionales, uno para Ex y otro para Hy,para describir la coordenada espacial. Ademas debemos notar que ya no necesi-tamos los superındices pues el tiempo ya es una variable implıcita en el MDFDT.En cada tiempo ’n’ los campos son calculados en Matlab mediante las siguienteslineas de programa:
ex(k) = ex(k) + 0,5[hy(k)− hy(k + 1)] (3.3)
hy(k) = hy(k) + 0,5[ex(k)− ex(k + 1)] (3.4)
En la primera de estas ecuaciones, el nuevo valor de ex(k) a la izquierdade la igualdad [para el tiempo (n + 1/2) ] proviene del antiguo valor ex(k) [altiempo (n − 1/2) ] que la maquina ya ha calculado y tenıa en la memoria maslos campos magneticos hy(k−1) y hy(k) [ propios del tiempo n ]. Para el vectorhy los ındices se han redondeado de los ındices k + 1/2 y k − 1/2 a k y k − 1para poder especificar la posicion de los campos en el arreglo computacional.
Simulacion dentro de la malla
Nuestro campo electromagnetico estara dado por un pulso gausiano pero paraeste caso particular dicho pulso tendra la caracterıstica que su centro estara ento = 2,5tao (donde tao es el periodo del laser en el vacio), es decir, solo habravalores diferntes de cero en la vecindad de 2.5tao y ademas tendra una duracionmedia de spread = 0,5∗tao el cual es el espesor del pulso como se puede apreciaren la figura (3,2).A continuacion mostramos el programa ’simple1.m’
o/o simple1.mclear;o/o Definicion de parametrosc = 3,0E + 8; o/o velocidad de la luzlo = 632,8E − 9; o/o longitud de onda del lasertao = lo/c; o/o periodoNz = 100; o/o particones en zNt = 100; o/o pasos temporales
20
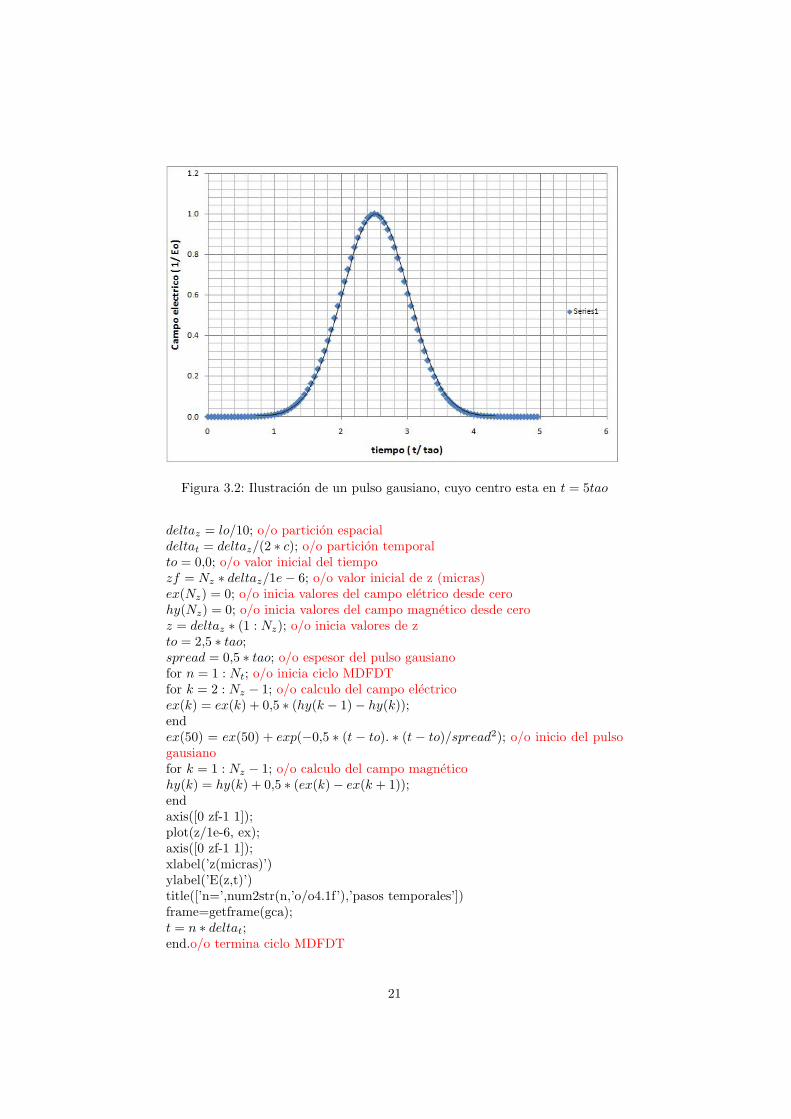
Figura 3.2: Ilustracion de un pulso gausiano, cuyo centro esta en t = 5tao
deltaz = lo/10; o/o particion espacialdeltat = deltaz/(2 ∗ c); o/o particion temporalto = 0,0; o/o valor inicial del tiempozf = Nz ∗ deltaz/1e− 6; o/o valor inicial de z (micras)ex(Nz) = 0; o/o inicia valores del campo eletrico desde cerohy(Nz) = 0; o/o inicia valores del campo magnetico desde ceroz = deltaz ∗ (1 : Nz); o/o inicia valores de zto = 2,5 ∗ tao;spread = 0,5 ∗ tao; o/o espesor del pulso gausianofor n = 1 : Nt; o/o inicia ciclo MDFDTfor k = 2 : Nz − 1; o/o calculo del campo electricoex(k) = ex(k) + 0,5 ∗ (hy(k − 1)− hy(k));endex(50) = ex(50) + exp(−0,5 ∗ (t − to). ∗ (t − to)/spread2); o/o inicio del pulsogausianofor k = 1 : Nz − 1; o/o calculo del campo magneticohy(k) = hy(k) + 0,5 ∗ (ex(k)− ex(k + 1));endaxis([0 zf-1 1]);plot(z/1e-6, ex);axis([0 zf-1 1]);xlabel(’z(micras)’)ylabel(’E(z,t)’)title([’n=’,num2str(n,’o/o4.1f’),’pasos temporales’])frame=getframe(gca);t = n ∗ deltat;end.o/o termina ciclo MDFDT
21

El programa comienza inicializando constantes y parametros. Los campos electri-cos y magneticos son inicializados desde cero. El calculo comienza obteniendolos campos electricos en cada nodo usando la ecuacion (2,44). A continuacion ,se introduce el valor de la fuente de campo electrico. El siguiente paso es cal-cular los campos magneticos. Finalmente el programa itera el procedimiento alsiguiente valor temporal.
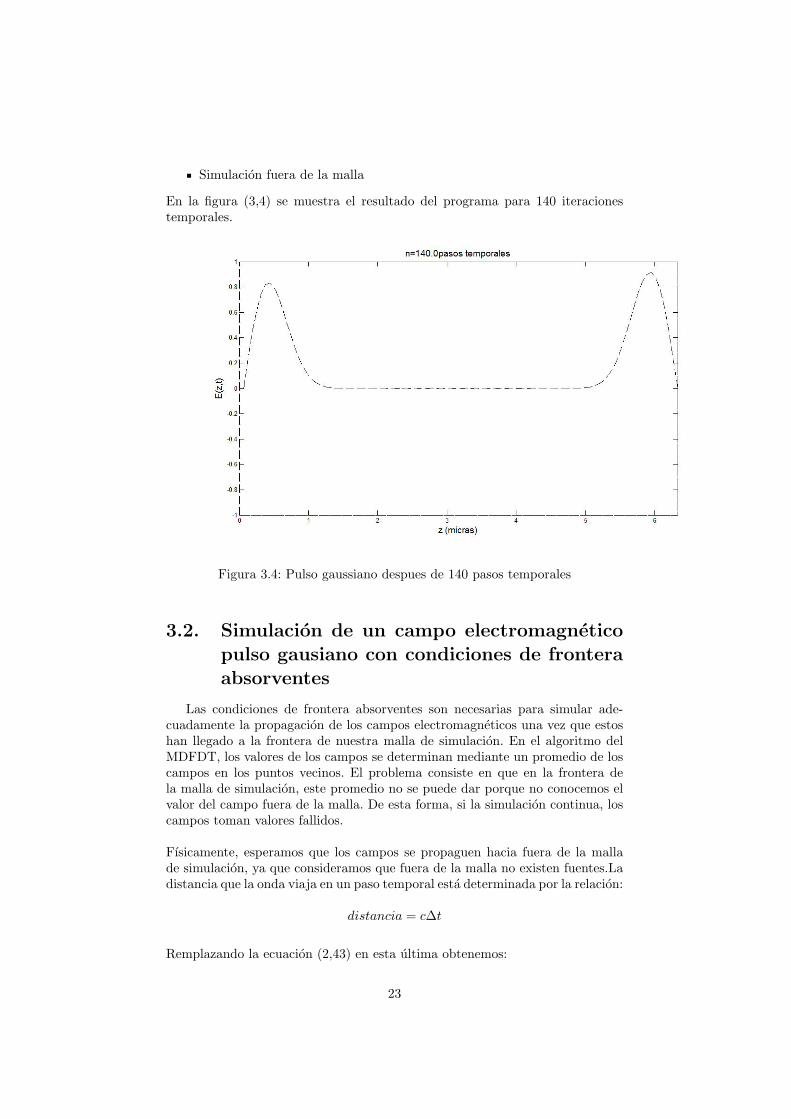
Simulacion fuera de la malla
Notar que en la simulacion anterior el programa se detiene antes de tocar ellımite de la malla de simulacion. En nuestro metodo, para calcular el campo ~Een un punto es necesario conocer los valores de ~H que rodean dicho punto. Sinembargo en el borde de la malla de simulacion no conocemos el punto corres-pondiente que esta fuera de la malla. De esta forma, no es posible calcular elcampo ~E en los valores lImites de la malla.
Para tener una mejor perspectiva acerca de este problema de frontera se si-mulo modificando el numero de pasos temporales a Nt = 200 el cual serıa unacontinuacion del programa anterior.
3.1.2. Resultados
Simulacion dentro de la malla
En la figura (3,3) se muestra el resultado final del programa para 100 iteracionestemporales.
Figura 3.3: Pulso gaussiano despues de 100 pasos temporales
22
Simulacion fuera de la malla
En la figura (3,4) se muestra el resultado del programa para 140 iteracionestemporales.
Figura 3.4: Pulso gaussiano despues de 140 pasos temporales
3.2. Simulacion de un campo electromagneticopulso gausiano con condiciones de fronteraabsorventes
Las condiciones de frontera absorventes son necesarias para simular ade-cuadamente la propagacion de los campos electromagneticos una vez que estoshan llegado a la frontera de nuestra malla de simulacion. En el algoritmo delMDFDT, los valores de los campos se determinan mediante un promedio de loscampos en los puntos vecinos. El problema consiste en que en la frontera dela malla de simulacion, este promedio no se puede dar porque no conocemos elvalor del campo fuera de la malla. De esta forma, si la simulacion continua, loscampos toman valores fallidos.
Fısicamente, esperamos que los campos se propaguen hacia fuera de la mallade simulacion, ya que consideramos que fuera de la malla no existen fuentes.Ladistancia que la onda viaja en un paso temporal esta determinada por la relacion:
distancia = c∆t
Remplazando la ecuacion (2,43) en esta ultima obtenemos:
23
distancia = c(∆z/2c) = ∆z/2
Esta relacion implica que al campo le toma un par de pasos temporales viajarun paso espacial. La forma de escribir esta condicion en matlab es:
Enx (1) = En−2x (2) (3.5)
Con esta expresion estamos asignado el valor del campo en la frontera en lugar ecacularlo. Esta condicion es facil de implementar. Solamente es necesario guar-dar el valor de Ex(2) un par de pasos temporales y luego asignarlos a Ex(1). Lascondiciones de frontera han sido implementadas en el programa ’simple2’que semuestra acontinuacion para 140 iterciones temporales y ademas se anadio unafuncion ”pulso”que introduce el campo electrico del tipo gausiano:
o/o simple2.mclear;o/o Definicion de parametrosc = 3,0E + 8; o/o velocidad de la luzlo = 632,8E − 9; o/o longitud de onda del lasertao = lo/c; o/o periodoNz = 100; o/o particones en zNt = 100; o/o pasos temporalesdeltaz = lo/10; o/o particion espacialdeltat = deltaz/(2 ∗ c); o/o particion temporalto = 0,0; o/o valor inicial del tiempozf = Nz ∗ deltaz/1e− 6; o/o valor inicial de z (micras)ex(Nz) = 0; o/o inicia valores del campo eletrico desde cerohy(Nz) = 0; o/o inicia valores del campo magnetico desde ceroz = deltaz ∗ (1 : Nz); o/o inicia valores de zto = 2,5 ∗ tao;spread = 0,5 ∗ tao; o/o espesor del pulso gausianoexlow1 = 0;exlow2 = 0;exhigh2 = 0;exhigh1 = 0;for n = 1 : Nt; o/o inicia ciclo MDFDTfor k = 2 : Nz − 1; o/o calculo del campo electricoex(k) = ex(k) + 0,5 ∗ (hy(k − 1)− hy(k));endex = pulso(ex, n, t, tao, to, spread); o/o introduccion de la funcion generadoradel pulso gausianoo/ocondicionesabsorventesex(1) = exlow2;exlow2 = exlow1;exlow1 = ex(2);ex(Nz) = exhigh2;exhigh2 = exhigh1;exhigh1 = ex(Nz − 1);
24

for k = 1 : Nz − 1; o/o calculo del campo magneticohy(k) = hy(k) + 0,5 ∗ (ex(k)− ex(k + 1));endaxis([0 zf-2 2]);plot(z, ex);axis([0 zf-2 2]);xlabel(’z(m)’)ylabel(’E(z,t)’)title([’n=’,num2str(n,’o/o4.1f’),’pasos temporales’])frame=getframe(gca);t = n ∗ deltat;end.o/o termina ciclo MDFDT
3.2.1. Resultados
En la figura (3,4) se muestra el resultado final del programa para 140 itera-ciones temporales incluyendo condiciones absorbentes de frontera.
Figura 3.5: Pulso gaussiano despues de 140 pasos temporales incluyendo condi-ciones absorbentes de frontera
25
Capıtulo 4
Discucion de Resultados
4.1. Simulacion de un campo electromagneticopulso gausiano sin condiciones de frontera
† En el apendice A se puede apreciar los distintos graficos que engloban aesta simulacion, en el primer grafico para la primera interacion temporal elvalor del campo electrico es el dado por la figua (3,2) el cual es: 3,73E−06siendo este un valor muy pequeno comparado con la escala de nuestragrafica es la razon que solo se pueda apreciar un pequeno punto.
† En las demas graficas apreciamos que mientras aumenta el tiempo el valordel campo electrico tambien aumenta y llega a un maximo en 50 pasostemporales lo cual tiene sentido debido a que el origen de nuestro campoelectrico-pulso gausiano segun la grafica (3,2) llega a su maximo en untiempo igual a 50 debido a que el total de particiones temporales fue de100
† Tercera fila
4.2. Simulacion de un campo electromagneticopulso gausiano con condiciones de fronteraabsorventes
26
Capıtulo 5
Conclusiones
27

Capıtulo 6
Referencia Bibliografica
1. autor1
2. autor2
28
Capıtulo 7
Apendice A
Figura 7.1: Pulso gaussiano despues de 1 pasos temporales
29
Figura 7.2: Pulso gaussiano despues de 13 pasos temporales
Figura 7.3: Pulso gaussiano despues de 21 pasos temporales
30
Figura 7.4: Pulso gaussiano despues de 33 pasos temporales
Figura 7.5: Pulso gaussiano despues de 38 pasos temporales
31
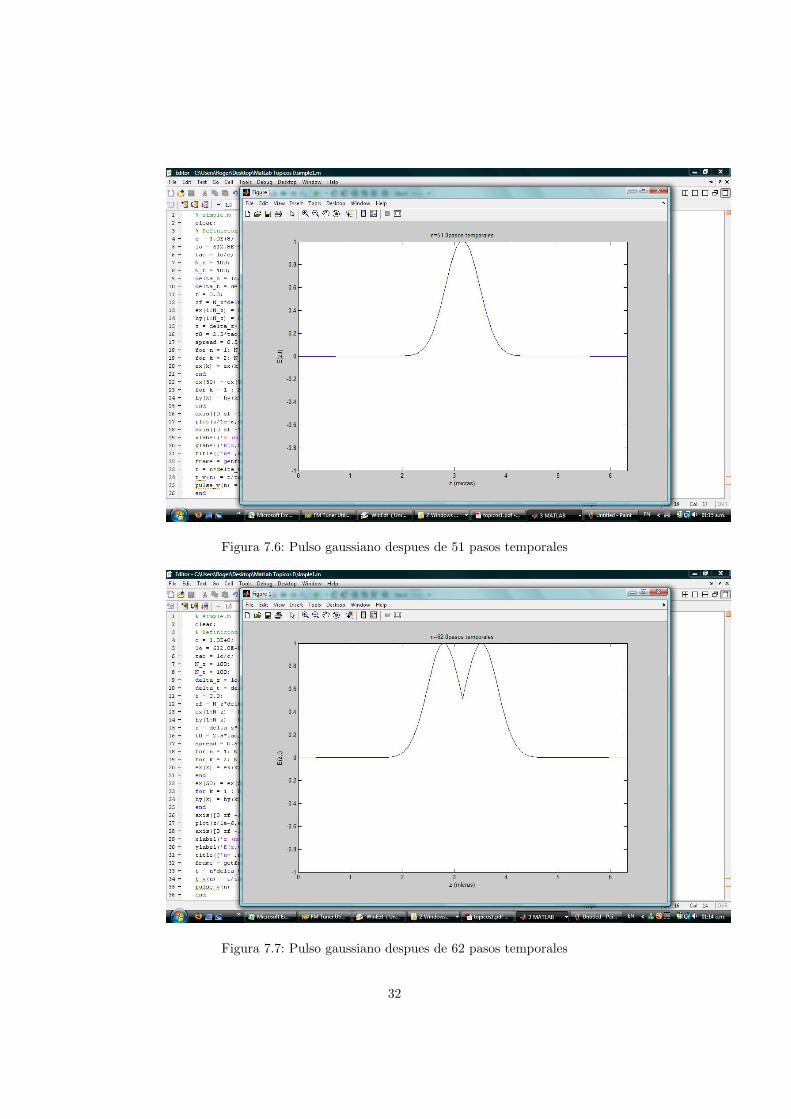
Figura 7.6: Pulso gaussiano despues de 51 pasos temporales
Figura 7.7: Pulso gaussiano despues de 62 pasos temporales
32

Figura 7.8: Pulso gaussiano despues de 73 pasos temporales
Figura 7.9: Pulso gaussiano despues de 83 pasos temporales
33
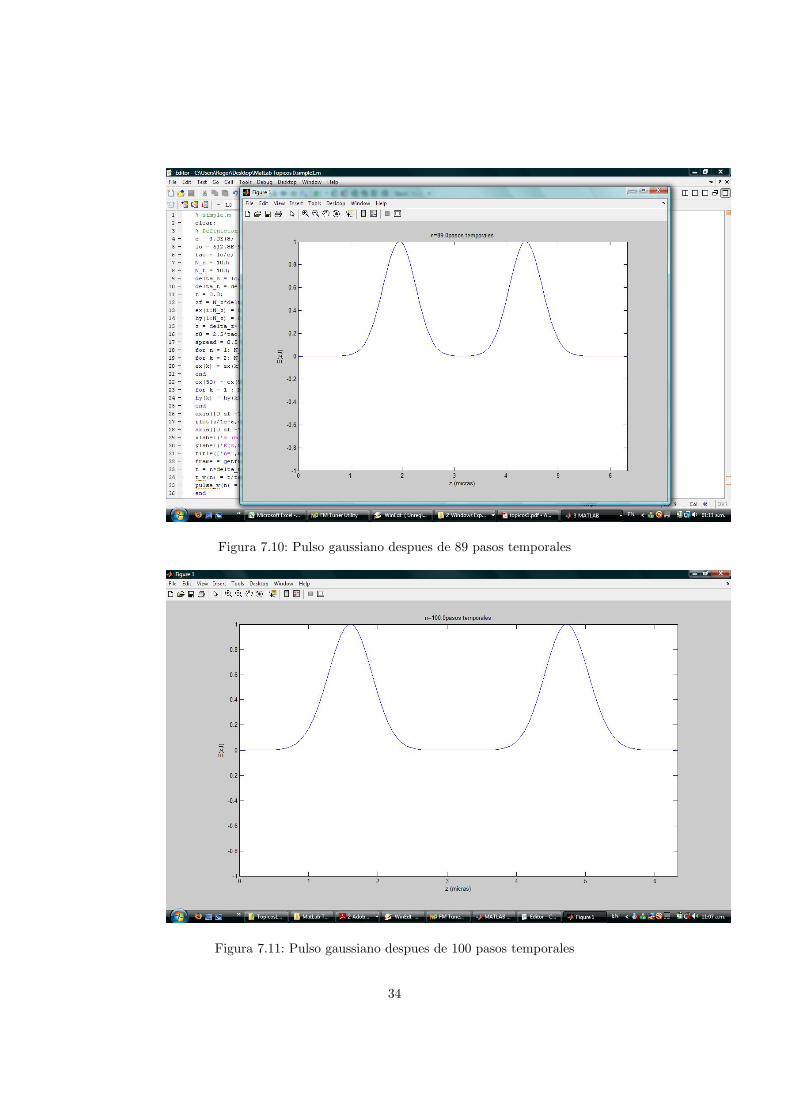
Figura 7.10: Pulso gaussiano despues de 89 pasos temporales
Figura 7.11: Pulso gaussiano despues de 100 pasos temporales
34

Capıtulo 8
Apendice B
Figura 8.1: Pulso gaussiano despues de 73 pasos temporales
35
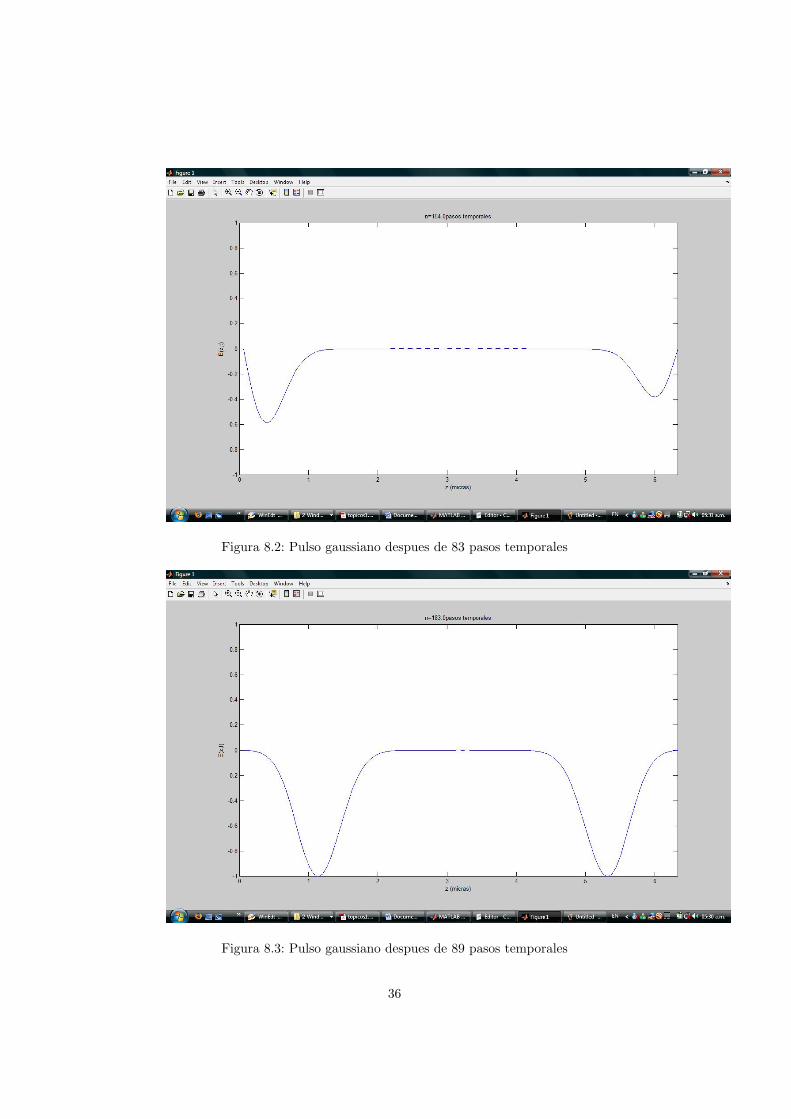
Figura 8.2: Pulso gaussiano despues de 83 pasos temporales
Figura 8.3: Pulso gaussiano despues de 89 pasos temporales
36

Figura 8.4: Pulso gaussiano despues de 100 pasos temporales
37

Capıtulo 9
Apendice C
Figura 9.1: Pulso gaussiano despues de 73 pasos temporales
38
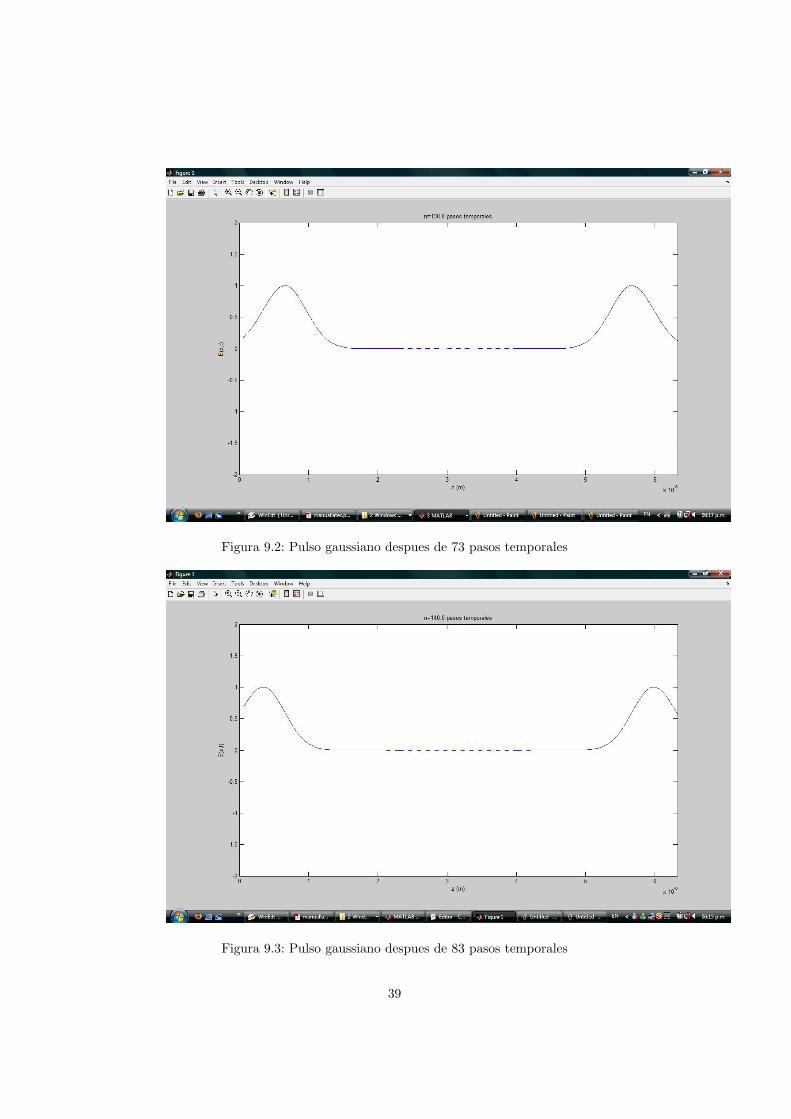
Figura 9.2: Pulso gaussiano despues de 73 pasos temporales
Figura 9.3: Pulso gaussiano despues de 83 pasos temporales
39

Figura 9.4: Pulso gaussiano despues de 89 pasos temporales
Figura 9.5: Pulso gaussiano despues de 200 pasos temporales
40