análisis de la trayectoria de un mecanismo paralelo tipo...
TRANSCRIPT

MEMORIAS DEL XXIV CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 19 al 21 DE SEPTIEMBRE DE 2018 CAMPECHE, CAMPECHE, MÉXICO
Tema A3b Mecanismos y Robótica: Singularidades
“Análisis de la trayectoria de un mecanismo paralelo tipo pantógrafo mediante su matriz jacobiana”
Gerardo Miguel Lucarioa y Yahve Abdul Ledezma Rubiob
a y b UNAM,Facultad de Ingeniería, Cd. Mx., CP 04510, México
* Dirección de correo electrónico: a) [email protected] b) [email protected]
RESUMEN
La matriz jacobiana (J) relaciona las velocidades angulares de entrada de los pares cinemáticos actuados, con las
velocidades lineales de salida del efector final (punto de trabajo) de cualquier mecanismo. Esta matriz también es utilizada
para definir índices de rendimiento de un mecanismo [4, 8, 12]. En el presente artículo se propone utilizar la gráfica del
determinante de J cuando es cero para describir el espacio de trabajo teórico de un mecanismo paralelo planar tipo
pantógrafo simétrico, ubicando las trayectorias en las que el mecanismo presenta una configuración con singularidades
(paralelas y/o seriales) mediante las gráficas del determiante de la parte simétrica y asimétrica de J.
Palabras Clave: Mecanismo paralelo planar, matriz jacobiana, singularidades seriales, singularidades paralelas, trayectoria, espacio de trabajo.
ABSTRACT
The Jacobian matrix (J) relates the input angular velocities of the active kinematic pairs, with the output linear velocities
of the end effector (point of work) of any mechanism. This matrix is also used to define performance indices of a mechanism
[4, 8, 12]. We propose to use the plot of the determinant of J when it is zero to describe the theoretical workspace of a
symmetric pantograph planar parallel mechanism, showing the trajectories in which the mechanism is in a singular
(parallel and/or serial) configuration by the plots of the determinant of symmetric and asymmetric part of J.
Keywords: Planar parallel mechanism, jacobian matrix, serial singularities, parallel singularities, trajectory, workspace.
Nomenclatura:
𝑽𝒑𝒂𝒑𝒃𝒙: Componente en x del vector formado del punto a al punto b
𝑽𝒑𝒂𝒑𝒃𝒚: Componente en y del vector formado del punto a al punto b
{X3, Y3}: Coordenadas del efector final
{𝜽�̇�, 𝜽�̇�}: Velocidad angular de las juntas actuadas
{𝑿�̇�, 𝒀�̇�}: Velocidad lineal del efector final
Jps: Parte simétrica de la matriz jacobiana
Jpas: Parte asimétrica de la matriz jacobiana
Ln: Longitud de la barra n. Donde n=1,2,3,4,5
1. Introducción
Durante los últimos años ha aumentado la necesidad de tener
robots dedicados a realizar tareas generales; es decir, que
puedan tener varias aplicaciones con mínimas o nulas
modificaciones en su estructura. Adicionalmente, estos
robots tienen que hacer las tareas con la mayor precisión y
prestaciones dinámicas posibles (velocidad, inercia y
potencia) [1]. Una solución a esta necesidad es el uso de
mecanismos paralelos, ya que tienen diversas ventajas
mecánicas respecto a los mecanismos seriales [2] como: alta
rigidez, poca inercia, altas frecuencias naturales, mejor
precisión, construcción mecánica modular simple y buena
relación potencia/masa [3,4]. Sin embargo, también
presentan desventajas relacionadas con el espacio de trabajo
como lo son: un espacio de trabajo útil muy reducido
respecto al espacio de trabajo teórico, demasiadas
trayectorias con singularidades dentro del espacio de
trabajo, su rendimiento está altamente relacionado con sus
parámetros geométricos [5], entre otras. Estas desventajas
son resultado de su espacio de trabajo cartesiano complejo y
de la alta relación no lineal de las variables de entrada con
las variables de salida [6].
Los mecanismos paralelos pueden ser espaciales o
planares, con diferentes grados de libertad (GDL). Los
mecanismos paralelos planares han sido utilizados en
dispositivos hápticos [7] o para realizar ejercicios de
rehabilitación [8]. Las configuraciones de estos mecanismos
pueden variar, pero el mecanismo tipo pantógrafo ha tenido
un gran interés de estudio, a pesar de ser el mecanismo
paralelo con menores grados de libertad (2 GDL) [9].
ISSN 2448-5551 MT 55 Derechos Reservados © 2018, SOMIM

MEMORIAS DEL XXIV CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 19 al 21 DE SEPTIEMBRE DE 2018 CAMPECHE, CAMPECHE, MÉXICO
El diseño de un mecanismo paralelo tipo pantógrafo es
complicado y complejo, ya que se tienen cinco parámetros
de diseño (longitudes de las barras) que pueden tomar
cualquier valor desde cero hasta infinito. En consecuencia,
para obtener un mayor espacio de trabajo útil, mejorando las
dimensiones del mecanismo se utilizan métodos de
optimización numéricos, ya que es un problema no lineal.
Algunos autores proponen optimizar el mecanismo
mediante el índice de condicional global y el índice de
condicional local [9]. Otros autores proponen utilizar,
adicionalmente, los índices de velocidad global, de carga
global y de rigidez (deformación) global. En general, estos
métodos consumen un gran tiempo de cómputo y son
complicados de usar en la práctica [10].
Este artículo presenta una propuesta para analizar el
espacio de trabajo teórico de un mecanismo paralelo planar
tipo pantógrafo simétrico o mecanismo planar RRRRR 1
simétrico, con base en las gráficas del determinante de las
matrices resultantes de dividir J en su parte simétrica y
asimétrica, cuando estas se aproximan a cero. También, se
usó la gráfica del determinante de J para obtener
información del área de trabajo teórica del mecanismo. Estas
gráficas muestran las trayectorias en las que el mecanismo
alcanza una configuración con alguna singularidad.
La separación de J, en su parte simétrica (Jps) y en su
parte asimétrica (Jpas), se propone como una herramienta
para simplificar el análisis de J y lograr identificar el tipo de
singularidades de cada matriz.
2. Descripción del mecanismo
Figura 1– Mecanismo tipo pantógrafo
El mecanismo planar RRRRR simétrico cuenta con cinco
barras o brazos (L1, L2, L3, L4, L5), conectadas entre sí
mediante cinco pares cinemáticos inferiores tipo revoluto
(P1, P2, P3, P4, P4 y P5). Una de estas barras está fija (L5)
y los pares cinemáticos inferiores activos (JA) son P1 y P5,
1 R, se refiere al par cinemático inferior tipo revoluto.
mientras que, los pares cinemáticos inferiores pasivos (JP)
son P2, P3 y P4.
Las coordenadas del efector final son las coordenadas
del punto P3 (punto de trabajo). En la Fig. 1 se puede
observar la disposición de los JA, los JP y de las barras del
mecanismo.
Las ecuaciones que describen al mecanismo han sido
presentadas en diferentes artículos [9-13]. La metodología y
resultados presentados por [11] se utilizaron como guía para
deducir las ecuaciones que describen al mecanismo.
Las ecuaciones que describen al mecanismo se
plantearon con el sistema de referencia colocado a la mitad
de la barra L5. En estas ecuaciones se utilizaron como
parámetros las dimensiones de las cinco barras, es decir, las
ecuaciones serán válidas para un mecanismo 5R no
simétrico y para un mecanismo 5R simétrico (L3=L2 y
L4=L1).
2.1. Grados de libertad
Un criterio para determinar los grados de libertad de un
mecanismo de cadenas cinemáticas seriales abiertas o
cerradas, es la fórmula de Grübler-Kutzbach:
1
( 1)g
i
i
M d n g f=
= − − + (1)
Donde:
• d: El orden del sistema tornillo. Para movimientos
planares d = 3.
• n: Número de eslabones.
• g: Número de juntas.
• fi: Grados de libertad asociados a la i-ésima junta.
Para el mecanismo en análisis, donde n=5 y g=5 se
obtiene que M=2. Se consideran únicamente pares
cinemáticos tipo revoluto. Este resultado muestra que el
efector final tendrá únicamente dos grados de libertad.
Los lugares geométricos en los que la cadena cinemática
presenta una configuración donde la ec. (1) no describe los
grados de libertad se le denomina singularidades:
concurrentes, seriales, de paralelismo, etc. Esto debido a que
la ecuación únicamente considera las relaciones geométricas
de los elementos.
2.2 Cinemática directa
La cinemática directa se basa en describir las coordenadas
del efector final en función de los ángulos de entrada en las
juntas actuadas.
Ocupando las ecuaciones de lazo que describen a los
eslabones pasivos
ISSN 2448-5551 MT 56 Derechos Reservados © 2018, SOMIM

MEMORIAS DEL XXIV CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 19 al 21 DE SEPTIEMBRE DE 2018 CAMPECHE, CAMPECHE, MÉXICO
2 2 2
2 2 2
2 3 2 3 2 0
4 3 4 3 3 0
X y
X y
Vp p Vp p l
Vp p Vp p l
+ − =
+ − = (2)
se obtuvo el sistema de ecuaciones que relaciona los puntos
P2, P4 y P3.
A partir del sistema de ecuaciones, ec. (2), se obtuvieron
las coordenadas del punto de trabajo
2
3 3
43
2
X Y g f
b b acY
a
= +
− + −=
(3)
Donde:
( )
( )
( )
( )
2
2 2 2
2 2 2 2
2
2 5 2 4 cos 4 2 4 sin 4
53 4 5 4 2 5 cos 4
4
1 2 3 4 1 5 cos 1 4 5cos 4
2 5 1cos 1 4 cos 4
2 1sin 1 2 4sin 4
2 5 1cos 1 4 cos 4
1
fg gL gL L
Lc f L L fL L f L
L L L L L L L Lf
L L L
L Lg
L L
b
L
a g
+ − −
= − + + + − +
− + − + +=
+ −
− +=
=
+ −
+=
De la ec. (3) se puede observar que “X3” y “Y3” pueden
tomar dos resultados, 𝜇 = 1 y 𝜇 = −1. Esto se refiere a la
configuración brazos arriba y brazos abajo. En la Fig. 2 se
pueden observar estas dos configuraciones.
Figura 2 – Configuración brazos arriba y brazos abajo.
2.3. Cinemática inversa
La cinemática inversa busca definir los ángulos que deberían
de tener los pares cinemáticos activos, en función de las
coordenadas del efector final.
En la ec. (2) se sustituyeron las siguientes identidades
trigonométricas tanto para 𝜃1 como para 𝜃4:
2
2
1 tan2
cos
1 tan2
−
=
+
2
2 tan2
sin
1 tan2
+
= (4)
Realizando el álgebra correspondiente, se obtuvieron las
siguientes expresiones:
( )2
1 1 1 4 1 11 2 arctan
2 1
b b a c
a
+ −=
(5)
( )2
2 2 2 4 2 24 2 arctan
2 2
b b a c
a
+ −=
(6)
Donde: 2
2 2 2 2
2
2 2 2 2
2
2 2 2 2
2
2 2 2 2
51 1 2 1 5 2 1 3 5 3 3 3
4
1 4 1 3
51 1 2 1 5 2 1 3 5 3 3 3
4
52 3 4 4 5 2 4 3 5 3 3 3
4
2 4 4 3
52 3 4 4 5 2 4 3 5 3 3 3
4
La L L L L L X L X X Y
b L Y
Lc L L L L L X L X X Y
La L L L L L X L X X Y
b L Y
Lc L L L L L X L X X Y
= − − + + − + +
=
= − + + − − + +
= − + + + + + + +
=
= − + − + − + + +
En las ecs. (5) y (6) se observa que cada ángulo puede
tomar dos posibles valores. Para 𝜃1 , 𝜎1 puede tomar el
valor de +1 o de -1. Para 𝜃4, 𝜎2 puede tomar el valor de +1
o de -1.
De estos resultados, se puede decir que existen cuatro
posibles soluciones de trabajo para la cinemática inversa.
Estas soluciones son:
• Configuración “+ +”
• Configuración “- +”
• Configuración “- -”
• Configuración “+ -”
ISSN 2448-5551 MT 57 Derechos Reservados © 2018, SOMIM
MEMORIAS DEL XXIV CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 19 al 21 DE SEPTIEMBRE DE 2018 CAMPECHE, CAMPECHE, MÉXICO
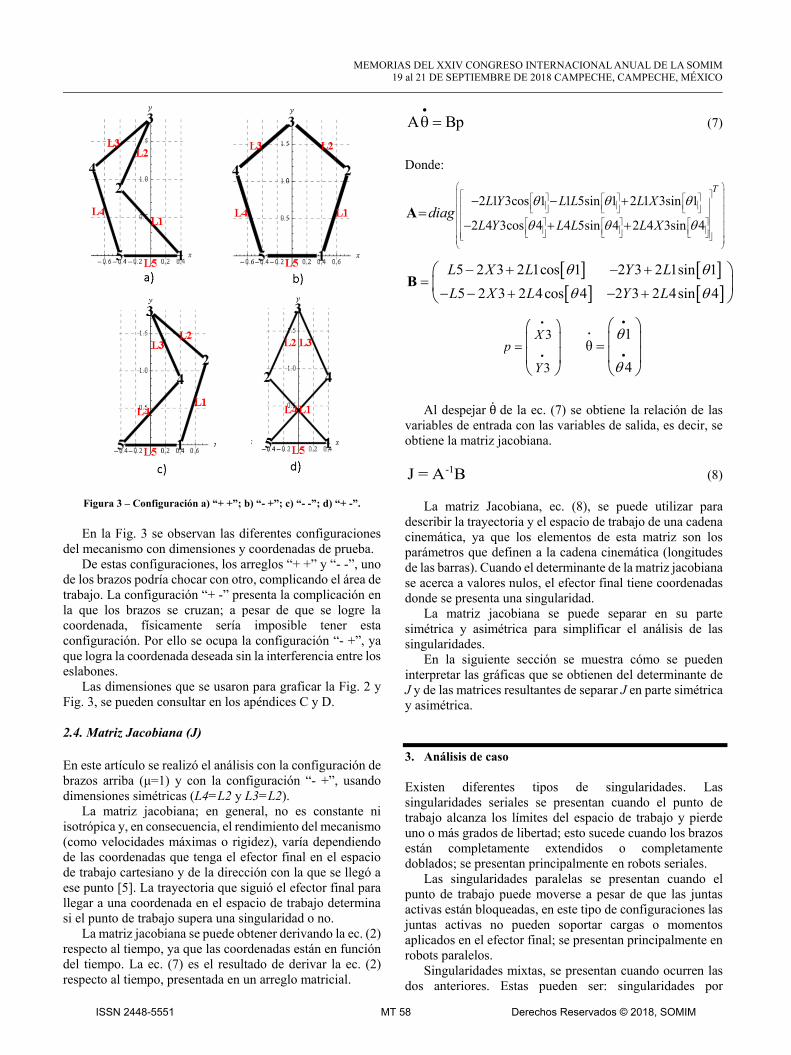
Figura 3 – Configuración a) “+ +”; b) “- +”; c) “- -”; d) “+ -”.
En la Fig. 3 se observan las diferentes configuraciones
del mecanismo con dimensiones y coordenadas de prueba.
De estas configuraciones, los arreglos “+ +” y “- -”, uno
de los brazos podría chocar con otro, complicando el área de
trabajo. La configuración “+ -” presenta la complicación en
la que los brazos se cruzan; a pesar de que se logre la
coordenada, físicamente sería imposible tener esta
configuración. Por ello se ocupa la configuración “- +”, ya
que logra la coordenada deseada sin la interferencia entre los
eslabones.
Las dimensiones que se usaron para graficar la Fig. 2 y
Fig. 3, se pueden consultar en los apéndices C y D.
2.4. Matriz Jacobiana (J)
En este artículo se realizó el análisis con la configuración de
brazos arriba (μ=1) y con la configuración “- +”, usando
dimensiones simétricas (L4=L2 y L3=L2).
La matriz jacobiana; en general, no es constante ni
isotrópica y, en consecuencia, el rendimiento del mecanismo
(como velocidades máximas o rigidez), varía dependiendo
de las coordenadas que tenga el efector final en el espacio
de trabajo cartesiano y de la dirección con la que se llegó a
ese punto [5]. La trayectoria que siguió el efector final para
llegar a una coordenada en el espacio de trabajo determina
si el punto de trabajo supera una singularidad o no.
La matriz jacobiana se puede obtener derivando la ec. (2)
respecto al tiempo, ya que las coordenadas están en función
del tiempo. La ec. (7) es el resultado de derivar la ec. (2)
respecto al tiempo, presentada en un arreglo matricial.
A Bp•
= (7)
Donde:
2 1 3cos 1 1 5sin 1 2 1 3sin 1
2 4 3cos 4 4 5sin 4 2 4 3sin 4
T
L Y L L L X
L Y L L L Xdiag
− − +
− + +=A
5 2 3 2 1cos 1 2 3 2 1sin 1
5 2 3 2 4cos 4 2 3 2 4sin 4
L X L Y L
L X L Y L
− + − +=
− − + − +
B
3
3
Xp
Y
•
•=
• 1θ
4
•
•=
Al despejar θ̇ de la ec. (7) se obtiene la relación de las
variables de entrada con las variables de salida, es decir, se
obtiene la matriz jacobiana.
-1J = A B (8)
La matriz Jacobiana, ec. (8), se puede utilizar para
describir la trayectoria y el espacio de trabajo de una cadena
cinemática, ya que los elementos de esta matriz son los
parámetros que definen a la cadena cinemática (longitudes
de las barras). Cuando el determinante de la matriz jacobiana
se acerca a valores nulos, el efector final tiene coordenadas
donde se presenta una singularidad.
La matriz jacobiana se puede separar en su parte
simétrica y asimétrica para simplificar el análisis de las
singularidades.
En la siguiente sección se muestra cómo se pueden
interpretar las gráficas que se obtienen del determinante de
J y de las matrices resultantes de separar J en parte simétrica
y asimétrica.
3. Análisis de caso
Existen diferentes tipos de singularidades. Las
singularidades seriales se presentan cuando el punto de
trabajo alcanza los límites del espacio de trabajo y pierde
uno o más grados de libertad; esto sucede cuando los brazos
están completamente extendidos o completamente
doblados; se presentan principalmente en robots seriales.
Las singularidades paralelas se presentan cuando el
punto de trabajo puede moverse a pesar de que las juntas
activas están bloqueadas, en este tipo de configuraciones las
juntas activas no pueden soportar cargas o momentos
aplicados en el efector final; se presentan principalmente en
robots paralelos.
Singularidades mixtas, se presentan cuando ocurren las
dos anteriores. Estas pueden ser: singularidades por
ISSN 2448-5551 MT 58 Derechos Reservados © 2018, SOMIM

MEMORIAS DEL XXIV CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 19 al 21 DE SEPTIEMBRE DE 2018 CAMPECHE, CAMPECHE, MÉXICO
concurrencia, cuando dos o más juntas pasivas del
mecanismo convergen, perdiendo el control de los
elementos posteriores (sus polos de Euler coinciden);
singularidades por simetría, dos o más elementos del
mecanismo realizan la misma función, entre otras.
Para observar el espacio de trabajo teórico (área en el
plano de trabajo donde el efector final tiene una determinada
posición alcanzable) se propone graficar el determinante de
J cuando sus valores se acerquen a cero.
La Fig. 4 es el resultado de graficar el determinante de la
ec. (8) cuando se aproxima a valores nulos. El rango de
valores en la coordenada z, valores del determinante de J, es
de -0.001 a 0.001, el rango de valores en la coordenada x es
de -2 a 2 y el rango en la coordenada y es de -2 a 2. El área
blanca corresponde al área donde el mecanismo puede tener
una configuración sin singularidades, está zona es el espacio
de trabajo útil, mientras que, las líneas que se observan sobre
el área blanca son los límites de esta área.
Figura 4 – Gráfico 3D de la matriz Jacobiana con los valores de barras
mostradas en el apéndice C.
Para observar las singularidades del mecanismo se
utilizó un plano de corte (Z=0) para obtener el contorno que
forma la superficie de la Fig. 4 cuando el determinante de J
es cero (Fig. 6).
Figura 5 – Gráfico 3D del determinante de J y el plano de corte z=0.
Figura 6 – Contorno formado por la superficie del determinante de J
en el plano de corte Z=0
De la gráfica anterior se observa que el límite exterior no
se logró graficar. Esto se debe a que el determinante de J
llega a tener valores complejos cuando se aproxima al plano
de corte. La siguiente figura muestra el resultado de graficar
la parte real (contorno azul) y la parte imaginaria (contorno
rojo) de los valores complejos, correspondientes al plano de
corte.
Figura 7 – Contorno formado por la superficie del determinante de J
en el plano de corte Z=0, considerando los valores complejos.
Para simplificar el análisis de las singularidades del
mecanismo se dividió J en su parte simétrica ec. (9) y
asimétrica ec. (10). Las gráficas del determinante de cada
una de las matrices aportaron información del área de trabajo
del mecanismo y se buscó una relación entre estas matrices
y el tipo de singularidades.
( )1
2
TJps += J J (9)
ISSN 2448-5551 MT 59 Derechos Reservados © 2018, SOMIM
MEMORIAS DEL XXIV CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 19 al 21 DE SEPTIEMBRE DE 2018 CAMPECHE, CAMPECHE, MÉXICO
( )1
2
TJpas −= J J (10)
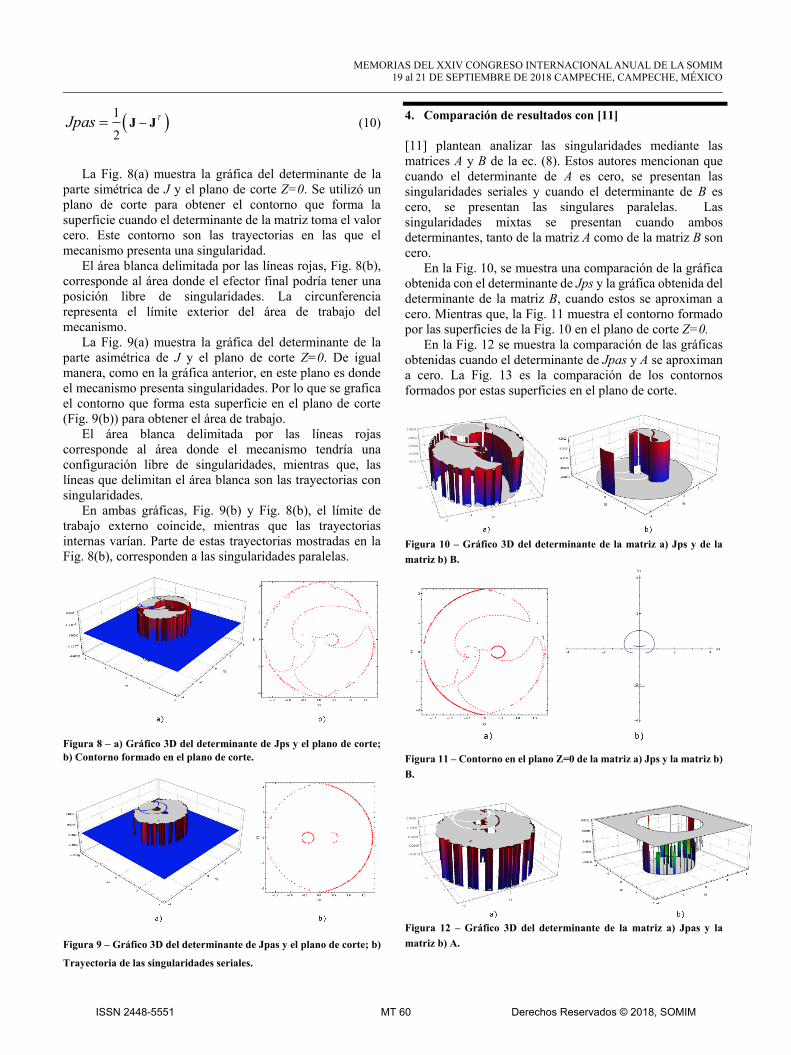
La Fig. 8(a) muestra la gráfica del determinante de la
parte simétrica de J y el plano de corte Z=0. Se utilizó un
plano de corte para obtener el contorno que forma la
superficie cuando el determinante de la matriz toma el valor
cero. Este contorno son las trayectorias en las que el
mecanismo presenta una singularidad.
El área blanca delimitada por las líneas rojas, Fig. 8(b),
corresponde al área donde el efector final podría tener una
posición libre de singularidades. La circunferencia
representa el límite exterior del área de trabajo del
mecanismo.
La Fig. 9(a) muestra la gráfica del determinante de la
parte asimétrica de J y el plano de corte Z=0. De igual
manera, como en la gráfica anterior, en este plano es donde
el mecanismo presenta singularidades. Por lo que se grafica
el contorno que forma esta superficie en el plano de corte
(Fig. 9(b)) para obtener el área de trabajo.
El área blanca delimitada por las líneas rojas
corresponde al área donde el mecanismo tendría una
configuración libre de singularidades, mientras que, las
líneas que delimitan el área blanca son las trayectorias con
singularidades.
En ambas gráficas, Fig. 9(b) y Fig. 8(b), el límite de
trabajo externo coincide, mientras que las trayectorias
internas varían. Parte de estas trayectorias mostradas en la
Fig. 8(b), corresponden a las singularidades paralelas.
Figura 8 – a) Gráfico 3D del determinante de Jps y el plano de corte;
b) Contorno formado en el plano de corte.
Figura 9 – Gráfico 3D del determinante de Jpas y el plano de corte; b)
Trayectoria de las singularidades seriales.
4. Comparación de resultados con [11]
[11] plantean analizar las singularidades mediante las
matrices A y B de la ec. (8). Estos autores mencionan que
cuando el determinante de A es cero, se presentan las
singularidades seriales y cuando el determinante de B es
cero, se presentan las singulares paralelas. Las
singularidades mixtas se presentan cuando ambos
determinantes, tanto de la matriz A como de la matriz B son
cero.
En la Fig. 10, se muestra una comparación de la gráfica
obtenida con el determinante de Jps y la gráfica obtenida del
determinante de la matriz B, cuando estos se aproximan a
cero. Mientras que, la Fig. 11 muestra el contorno formado
por las superficies de la Fig. 10 en el plano de corte Z=0.
En la Fig. 12 se muestra la comparación de las gráficas
obtenidas cuando el determinante de Jpas y A se aproximan
a cero. La Fig. 13 es la comparación de los contornos
formados por estas superficies en el plano de corte.
Figura 10 – Gráfico 3D del determinante de la matriz a) Jps y de la
matriz b) B.
Figura 11 – Contorno en el plano Z=0 de la matriz a) Jps y la matriz b)
B.
Figura 12 – Gráfico 3D del determinante de la matriz a) Jpas y la
matriz b) A.
ISSN 2448-5551 MT 60 Derechos Reservados © 2018, SOMIM

MEMORIAS DEL XXIV CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 19 al 21 DE SEPTIEMBRE DE 2018 CAMPECHE, CAMPECHE, MÉXICO
Figura 13 – Contorno en el plano Z=0 de la matriz a) Jpas y la matriz
b) A.
De las figuras anteriores se puede hacer una relación
entre el tipo de singularidades y la matriz utilizada para
describirlas. En la Fig. 13, se observa que los límites del área
de trabajo son muy similares, por lo que se afirma que la
parte asimétrica de la matriz jacobiana puede describir las
singularidades seriales del mecanismo.
Basados en la Fig. 13(a), el determinante de Jpas cuando
es igual a cero define el límite exterior (circunferencia
externa) y el límite interior (circunferencias internas) del
área de trabajo del mecanismo en análisis.
En la Fig. 11 se puede observar que no tienen ninguna
similitud los contornos del determinante de las matrices Jpa
y A cuando son cero, pero se puede relacionar la parte
simétrica de J con las singularidades paralelas y las
singularidades seriales (Fig. 13(a)).
Tanto en la Fig. 13(a) como en la Fig. 11(a) se puede
observar que ambas gráficas representan las trayectorias en
las que el mecanismo presenta singularidades, por lo que se
decidió sobreponer una gráfica sobre otra para representar
de una mejor manera el área de trabajo teórica (Fig. 14).
Figura 14 – Contornos del determinante de Jps (contorno) y Jpas
(contorno azul) cuando son cero.
El tiempo de computo necesario para obtener los
contornos de la Fig. 14 (área de trabajo teórica) fue de
1172.72 segundos, en una computadora portátil con las
características mostradas en el apéndice E.
En la Fig. 14 se observa que el límite exterior del espacio
de trabajo formado por el determinante de Jps y de Jpas son
similares, por lo que se considera que estos contornos
representan bien el espacio de trabajo teórico del
mecanismo.
El contorno de la Fig. 14, muestra las trayectorias en las
que el mecanismo tendrá una configuración con alguna
singularidad, ya sea una singularidad serial o una
singularidad paralela. En estas trayectorias se pierde el
control del mecanismo, por lo tanto, el control del efector
final. Es decir, el efector final no podrá salir de ese punto
con singularidad si éste no tiene la suficiente inercia como
para salir de esa trayectoria. Por lo que, la capacidad del
efector final para superar una singularidad depende de la
trayectoria que sigue al llegar a dicha singularidad, esto
dentro del espacio de trabajo.
5. Conclusión
La matriz jacobiana, al tener los parámetros de diseño del
mecanismo en sus elementos, contiene la información del
área de trabajo útil del mecanismo, pero es complejo
interpretar los resultados obtenidos con las gráficas
mostradas en la sección “Análisis de caso”, ya que su
determinante contiene valores complejos cerca del plano de
corte. Mientras que, la combinación de las gráficas del
determinante de la parte simétrica y de la parte asimétrica de
J cuando estas son cero, mostraron mayor información del
tipo de singularidades presentes en el área de trabajo. Por lo
que, separar J en su parte simétrica y asimétrica es una buena
herramienta para analizar las singularidades presentes en el
área de trabajo del mecanismo.
Con el método propuesto se pueden hacer diferentes
gráficas del determinante de la parte simétrica y asimétrica
de la matriz jacobiana, con dimensiones de barras
propuestas, para ir obteniendo el espacio de trabajo deseado
y mediante un método de prueba y error encontrar las
mejores dimensiones de las barras. Este punto se plantea
mejorar por medio de un modelado de optimización.
La principal ventaja del método propuesto, respecto a la
metodología tradicional propuesta en [11] es que al separar
la matriz J en su parte simétrica y asimétrica se logró obtener
mayor información de las singularidades (Fig. 14),
principalmente con la parte simétrica (Fig. 11).
La desventaja de la matriz jacobiana es que no tiene
información para determinar si se supera la singularidad con
la trayectoria que seguía o no. Para ello, es necesario
involucrar la energía cinética y potencial de los elementos
del sistema. Esta información se puede encontrar en las
ecuaciones inerciales del sistema.
ISSN 2448-5551 MT 61 Derechos Reservados © 2018, SOMIM
MEMORIAS DEL XXIV CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 19 al 21 DE SEPTIEMBRE DE 2018 CAMPECHE, CAMPECHE, MÉXICO
6. Trabajo a futuro
Se requiere encontrar cuales son las mejores longitudes de
las barras, para ello se propone optimizar dichas longitudes
del mecanismo planteando la función objetivo y la función
restricción del mismo. La función objetivo sería la función
de Lagange o la función de Hamilton (estado energético del
sistema). La función restricción sería el determinante de la
matriz jacobiana o las dimensiones físicas del sistema. Esta
optimización, se aplicaría caracterizando el mecanismo para
el grupo de población deseado.
Agradecimientos
El presente artículo se desarrolló gracias al tema asignado
por el doctor Miguel A. Padilla del Instituto de Ciencias
Aplicadas y Tecnología (ICAT) de la Universidad Nacional
Autónoma de México (UNAM).
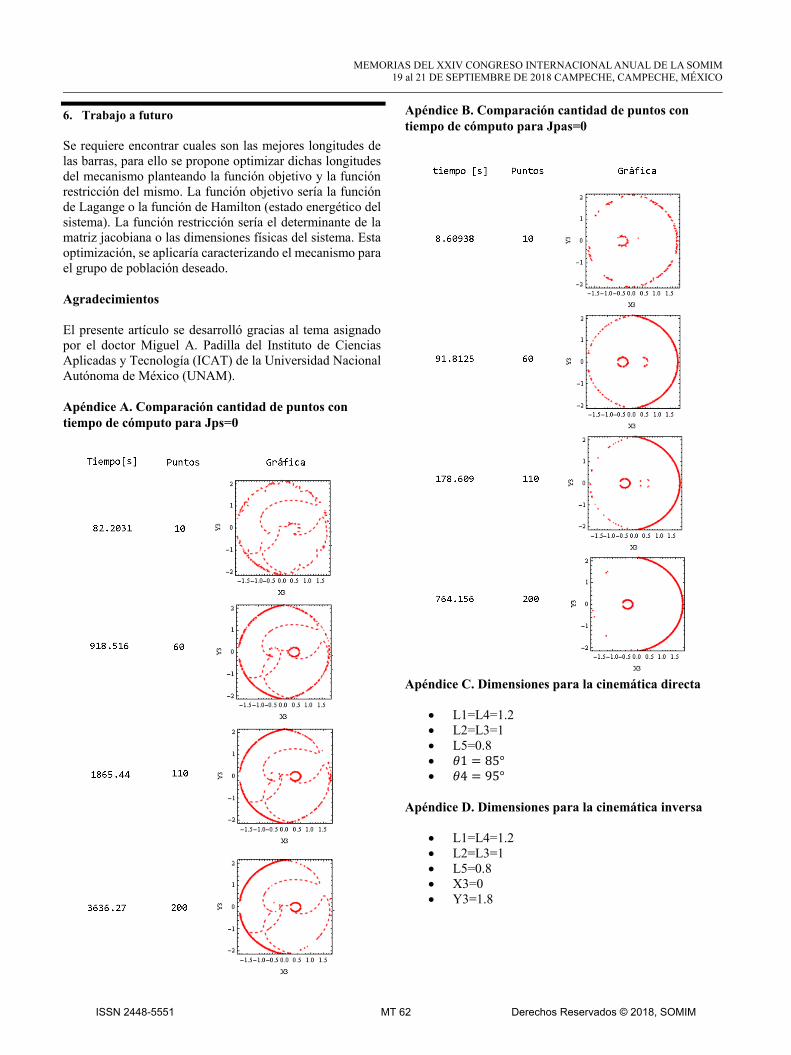
Apéndice A. Comparación cantidad de puntos con
tiempo de cómputo para Jps=0
Apéndice B. Comparación cantidad de puntos con
tiempo de cómputo para Jpas=0
Apéndice C. Dimensiones para la cinemática directa
• L1=L4=1.2
• L2=L3=1
• L5=0.8
• 𝜃1 = 85° • 𝜃4 = 95°
Apéndice D. Dimensiones para la cinemática inversa
• L1=L4=1.2
• L2=L3=1
• L5=0.8
• X3=0
• Y3=1.8
ISSN 2448-5551 MT 62 Derechos Reservados © 2018, SOMIM
MEMORIAS DEL XXIV CONGRESO INTERNACIONAL ANUAL DE LA SOMIM 19 al 21 DE SEPTIEMBRE DE 2018 CAMPECHE, CAMPECHE, MÉXICO
Apéndice E. Recursos de computo usados
• Procesador: Intel Core i7-7500U con 4
procesadores lógicos y 2 núcleos con una
frecuencia de reloj de 2.70 a 2.90 GHz.
• Memoria Ram: 16 GB
• Memoria GPU: 6.9 GB
• SSD: 250 GB
Apéndice F. Software usado
Las gráficas y el desarrollo de las ecuaciones se realizaron
con el software, Mathematica 11.1 versión estudiantil.
Disponible en:
http://www.wolfram.com/solutions/education/students/inde
x.es.html?footer=lang
REFERENCIAS
[1] Zhang, D. (2009). Parallel robotic machine tools. New York, USA: Springer. doi: 10.1007/978-1-4419-1117-9
[2] Briot, S. y Bonev, I. (2007). Are Parallel Robots More Accurate than Serial Robots? CSME Transactions, 31 (4), 445-456. Hal id: hal-00362500
[3] Chung, Y. H. y Lee, J. W. (2001). Design of a new 2 DOF parallel mechanism. IEEE/ASME International Conference on Advanced Intelligent Mechatronics Proceedings. 1, 129-134. doi:10.1109/AIM.2001.936442
[4] Chablat, D. y Wenger, P. (2007). The kinematic analysis of a symmetrical three-degree-of-freedom planar parallel manipulator. ArXiv. arXiv:0705.0959.
[5] Le, T. D., Kang, H. J. y Doan, Q. V. (2013). A method for optimal kinematic design of five-bar planar parallel manipulators. International Conference on Control, Automation and Information Sciences (ICCAIS), 7-11. doi: 10.1109/ICCAIS.2013.6720521
[6] Chablat, D., Wenger, P., y Merlet, J. (2002). Workspace analysis of the orthoglide using interval analysis. En Lenarčič J. y Thomas F. (Ed.) Advances in Robot Kinematics (pp. 397-406). Dordrecht, Holanda: Springer. doi: 10.1007/978-94-017-0657-5_42
[7] Campion G. (2005). The Pantograph Mk-II: A Haptic Instrument. En: Campion G. (Ed.) The Synthesis of Three Dimensional Haptic Textures: Geometry, Control, and Psychophysics (pp. 45-58). London: Springer. doi: 10.1007/978-0-85729-576-73
[8] Krebs, H., Ferraro, M., Buerger, S., Newbery, M., Makiyama, A., Sandmann, M., Lynch, D., Volpe, B. y Hogan, N. (2004). Rehabilitation robotics: pilot trial of a spatial extension for MIT-Manus. Journal of NeuroEngineering and Rehabilitation, 1(1), 5. doi: 10.1186/1743-0003-1-5.
[9] Liu, X. J., Wang, J., y Zheng, H. J. (2006). Optimum design of the 5R symmetrical parallel manipulator with a surrounded and good-condition workspace. Robotics and Autonomous Systems, 54(3), 221-233. doi: 10.1016/j.robot.2005.11.002.
[10] Huang, T., Li, M., Li, Z., Chetwynd, D. G. y Whitehouse, D. J. (2004). Optimal kinematic design of 2-DOF parallel manipulators with well-shaped workspace bounded by a specified conditioning index. IEEE Transactions on Robotics and Automation, 20(3), 538-543. doi: 10.1109/TRA.2004.824690
[11] Liu, X. J., y Wang, J. (2014). Parallel kinematics. Type, Kinematics, and Optimal Design. Heidelberg, Berlin: Springer. doi: 10.1007/978-3-642-36929-2.
[12] Liu, X. J., Wang, J., y Pritschow, G. (2006). Performance atlases and optimum design of planar 5R symmetrical parallel mechanisms. Mechanism and machine theory, 41(2), 119-144. doi: 10.1016/j.mechmachtheory.2005.05.003
[13] Cervantes-Sánchez, J., Hernández-Rodrı́guez, J. y Rendón-Sánchez, J. (2000). On the workspace, assembly configurations and singularity curves of the RRRRR-type planar manipulator. Mechanism and Machine Theory, 35(8), 1117-1139. doi: 10.1016/S0094-114X(99)00061-0
[14] Waldron, K., Wang, S. L., y Bolin, S. (1985). A study of the Jacobian matrix of serial manipulators. Journal of Mechanisms, Transmissions, and Automation in Design, 107(2), 230-237. doi: 10.1115/1.3258714
ISSN 2448-5551 MT 63 Derechos Reservados © 2018, SOMIM