anÁlisis modal operacional
TRANSCRIPT

ANÁLISIS MODAL EXPERIMENTAL
Juan Carlos Jiménez

a) Contexto general del temaEl problema del comportamiento de sistemas MDOF gira alrededor de las ecuaciones de movimiento, sintetizadas en la ecuación:
La ecuación matricial de movimiento se puede resolver: 1. en el dominio de la frecuencia, o2. en el dominio del tiempo 2.1 Técnicas de integración 2.2 Análisis modal

• El análisis modal se basa en el enfoque de la vibración de los sistemas como una combinación tipo “suma ponderada” de patrones de deflexión globales denominados modos de vibración.
• Si bien el análisis modal posibilita la evaluación de la respuesta (fuerzas internas o deflexiones) de un sistema, son los modos de vibración su foco de actuación.
• Análisis modal: proceso de determinación de los parámetros modales de una estructura para todos los modos en cierto rango de frecuencias de interés.
• Parámetros modales: 1) forma modal 2) frecuencia modal 3) amortiguamiento modal

• El análisis modal experimental, EMA, se centra en la determinación de parámetros modales, constituyéndose en un instrumento valioso para abordar una gran variedad de problemas estructurales.
• La identificación modal experimental se consigue a partir de mediciones de vibración en diferentes localizaciones de la estructura.
• Así pues, tres aspectos fundamentales del EMA son: 1) instrumentación de la estructura2) adquisición de señales/registros3) tratamiento de señales

• Existen dos clase de EMA: 1) Análisis modal experimental (EMA)2) Análisis modal operacional (OMA)
• El EMA se basa en la construcción de la matriz de funciones de respuesta en frecuencia, que relaciona las fuerzas de excitación y las respuestas de vibración.
• En OMA, la identificación modal se consigue con base únicamente en las respuestas de vibración (output-only modal analysis).
• El OMA es usado en estructuras de ingeniería civil (o mecánicas) que no son fáciles de excitar artificialmente.
• Una de las mayores ventajas del OMA es que se realiza bajo las condiciones normales de servicio/operación de la estructura.
• Existen en OMA métodos en el dominio del tiempo y en el dominio de la frecuencia.
• El presente trabajo se centra en el método de descomposición en el dominio de la frecuencia (frequency domain decomposition, FDD).
• Rune Brincker, Palle Andersen son los inventores del método FDD (patentado en EE.UU en el 2004).
• A día de hoy, los métodos de OMA en el dominio de la frecuencia se apoyan en el FDD, introduciéndole ciertas mejoras.
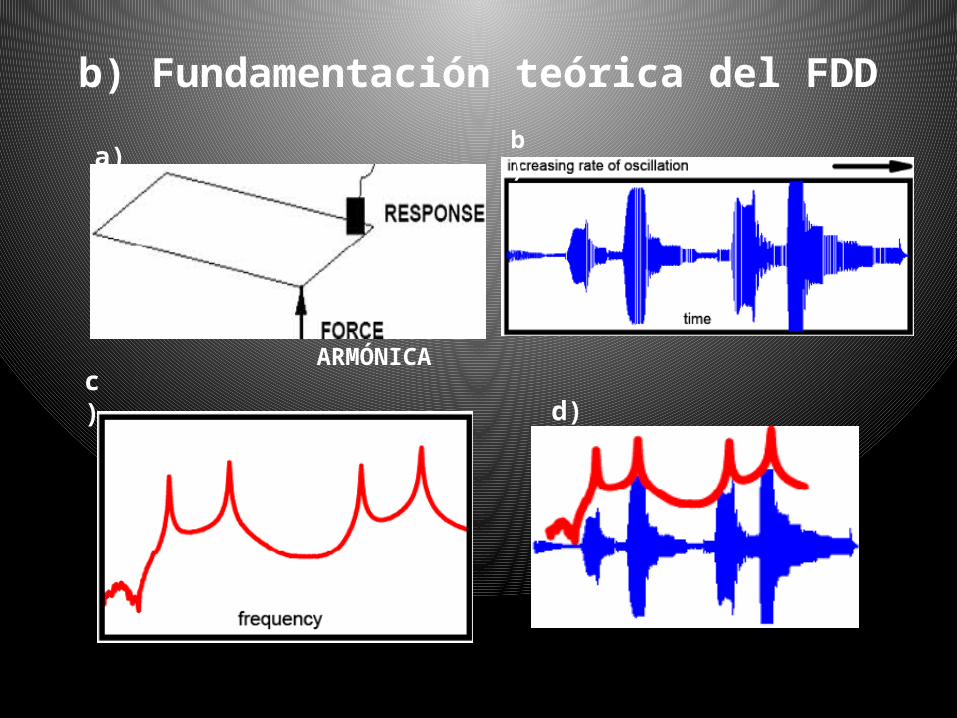
b) Fundamentación teórica del FDD
a)b)
c) d)
ARMÓNICA

PREMISA FUNDAMENTAL:
EN LA VECINDAD DE UNA RESONANCIA (FRECUENCIA NATURAL), LA RESPUESTA TOTAL ESTÁ FUERTEMENTE DOMINADA POR LA CONTRIBUCIÓN DEL MODO CUYA FRECUENCIA NATURAL ES LA MÁS CERCANA.

En lo que hace a su fundamentación teórica, el método FDD combina:1. Respuesta en el dominio de la frecuencia de
sistemas MDOF.2.Análisis espectral de vibraciones aleatorias.3. Descomposición en valores singulares.• Respuesta en el dominio de la frecuencia
– Caso SDOF:
Aplicando la transformada de Laplace:
Z: rigidez dinámica

Invirtiendo Z y llamándola H: función de transferencia:
(1)
denominador de (1): ecuación característica del sistema
:raíces de la ecuación característica o polos del sistema
A`s: residuos; H(w): función de respuesta en frecuencia

– Caso MDOF:
transformando la ecuación al dominio de Laplace:
Z: matriz de rigidez dinámica, y llamando H a la inversa de Z:
H(jw): matriz de funciones de respuesta en frecuencia
Y en un contexto de estímulo-respuesta sobre un sistema lineal, llamando X(p) = Y(jw) y F(p) = X(jw):
Y(w): vector de transformadas de Fourier de la señales de estímulo/excitaciónX(w): vector de transformadas de Fourier de las señales de respuesta

Algo más sobre H:El Algebra Lineal muestra que la inversa de una matriz puede calcularse:
lo que posibilita matemáticamente que H pueda expresarse:
en donde el término general de H quedaría representado por:

• Donde hij(w) significa: respuesta en el punto “i” debido a una excitación en el punto “j”.
• Puesto que M, C, K son simétricas, H(w) es también simétrica, lo cual implica que hij ₌ hji: reciprocidad.
• Lo más relevante: Se generaliza al caso MDOF la representación de polos y residuos.
• La matriz adjunta (de residuos) contiene los vectores modales y el determinante de Z (polos): frecuencias y amortiguamientos modales.
• Así pues, la matriz de funciones de respuesta en frecuencia contiene información sobre los modos de vibración del sistema (residuos) y sus frecuencias y amortiguamientos respectivos (polos)…

• Y a partir de esta evidencia teórica, el análisis modal experimental (EMA) basa sus métodos en la extracción de dichos parámetros modales.
• El EMA tradicional construye la matriz H sobre la base del conocimiento de las señales de excitación x(t) inducidas y las de respuesta y(t) medidas/sensadas.
• Las señales de excitación se producen gracias a dispositivos como martillos excitadores o rotores con cargas excéntricas.

• La inducción de excitaciones a los sistemas estructurales debe ser tal que active todos los modos de vibrar a los que se quiere caracterizar, lo cual puede conllevar daños en tales sistemas.
• El punto fuerte del análisis modal operacional (OMA) es que consigue prescindir del input (señales de excitación) en el problema de la extracción de los parámetros modales. Por ello, se le conoce también como output-only modal testing.
• En el caso de los métodos de OMA en el dominio de la frecuencia esto se logra, sin dejar de tener presente todo lo anterior,
1. enfocando el problema de las vibraciones del sistema estructural como un proceso estocástico en el campo complejo, y
2. teniendo ruido blanco como señal(es) de input. • Ruido blanco: proceso estocástico estacionario con
densidad espectral constante sobre todo el eje de frecuencias, lo cual significa que a cada frecuencia se asocia una misma cantidad de energía.
• En la práctica del OMA el ruido blanco puede conseguirse a partir de cargas naturales (viento, tráfico,etc.), por lo que suele hablarse en tales casos de “condiciones de vibración ambiental”.

• Tomando como punto de partida
• Con algunas manipulaciones matemáticas, la ec. (3) puede expresarse en términos de densidades espectrales de potencia (DEPs):
• en donde: • Gyy: matriz de DEPs de las señales de input
• Gxx: matriz de DEPs de las señales de outputs
(3)
:matriz de complejas conjugadas de H:matriz transpuesta de H
•
•
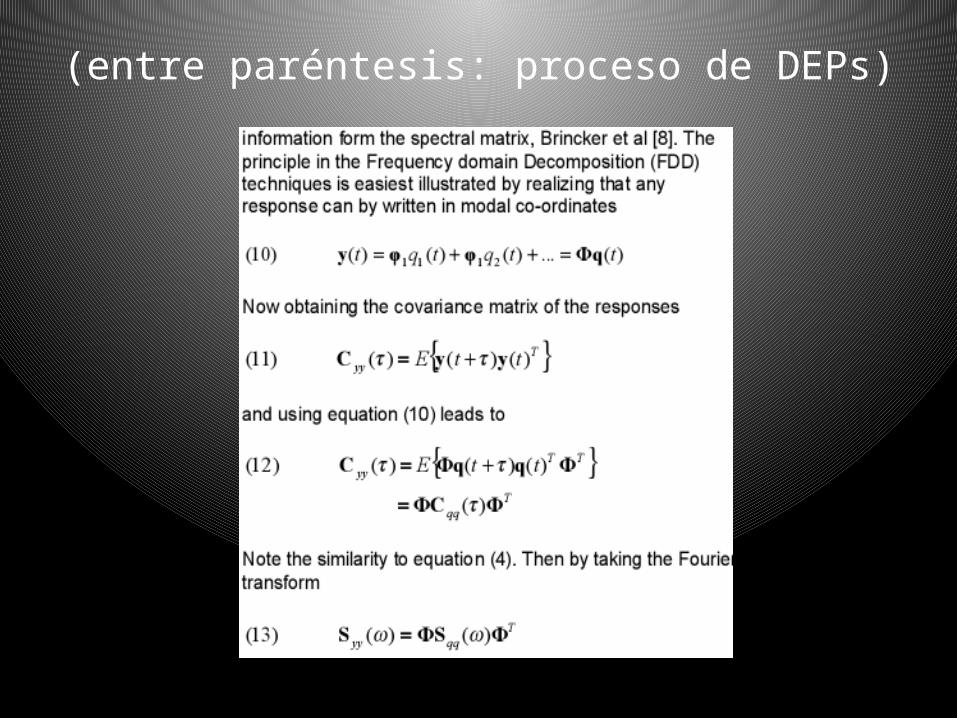
(entre paréntesis: proceso de DEPs)

• La DEP contiene información sobre cómo se distribuye la energía en una señal en su rango de frecuencias.
• Las DEPs pueden calcularse directamente a partir de las transformadas de Fourier (TFs) de las señales:
• Las TFs son transformadas discretas de Fourier; se construyen usando el algoritmo de la transformada Rápida de Fourier (FFT).
:densidad espectral cruzada
:densidad autoespectral

• Asumiendo “r” canales de input y “m” canales de respuestas medidas:
• En OMA, el hecho de tener señales de ruido blanco como input se traduce en una matriz Gxx diagonal (elementos de la diagonal: constantes).
Gxx= D;
mult. los dos factores en fracciones parciales y usando las exp. para Rk y Gxx
;
en la práctica, se desprecia la contribución del segundo término:
• n*: en una cierta frecuencia w, sólo un número limitado de modos contribuyen significativamente, típicamente uno o dos modos
(4)

• La ec. (4) muestra la relación entre los datos de respuesta medidos y los parámetros modales fk y λk.
• El siguiente paso es la extracción de los parámetros modales a partir de las señales de respuesta medidas.
• El método clásico peak-picking o FDB se basa en la inspección de las m2 funciones de densidad espectral de la matriz Gyy de m x m.
• El método FDB resulta tedioso en los casos en que no son pocos los puntos de respuesta monitoreados.
• Es proclive a errores en aquellos casos prácticos en los que los modos a detectar son muy cercanos.

• El método de descomposición en el dominio de la frecuencia, FDD, introduce el algoritmo de descomposición en valores singulares, SVD para remediar estos problemas del FDB.
• A partir de la matriz de funciones de densidad espectral, el algoritmo SVD opera sobre cada frecuencia discreta ω = ωi, esto es, sobre matrices de valores complejos Gyy(ωi), tantas como muestras (valores discretos) se hayan considerado en el intervalo de estudio.
• SVD factoriza cada matriz Gyy(ωi) en un producto de vectores singulares Ui, Vi y su matriz correspondiente de valores singulares S:

Ui , Vi : matrices unitarias (equiv. complejo a matrices ortogonales).
Además, Ui = Vi ya que Gyy es normal. Y así: Gyy(ωi) = Ui Si Ui T
La matriz de funciones de densidad espectral, en cada frecuencia discreta, se ha descompuesto en valores y vectores singulares.
;

• Es decir, en cada frecuencia, de las densidades espectrales se han desagregado jerárquicamente las contribuciones de los diferentes modos a la respuesta del sistema.
Espectro de valores singulares de las aceleraciones longitudinales


Amortiguamiento modalRefinamiento del mét. FDD

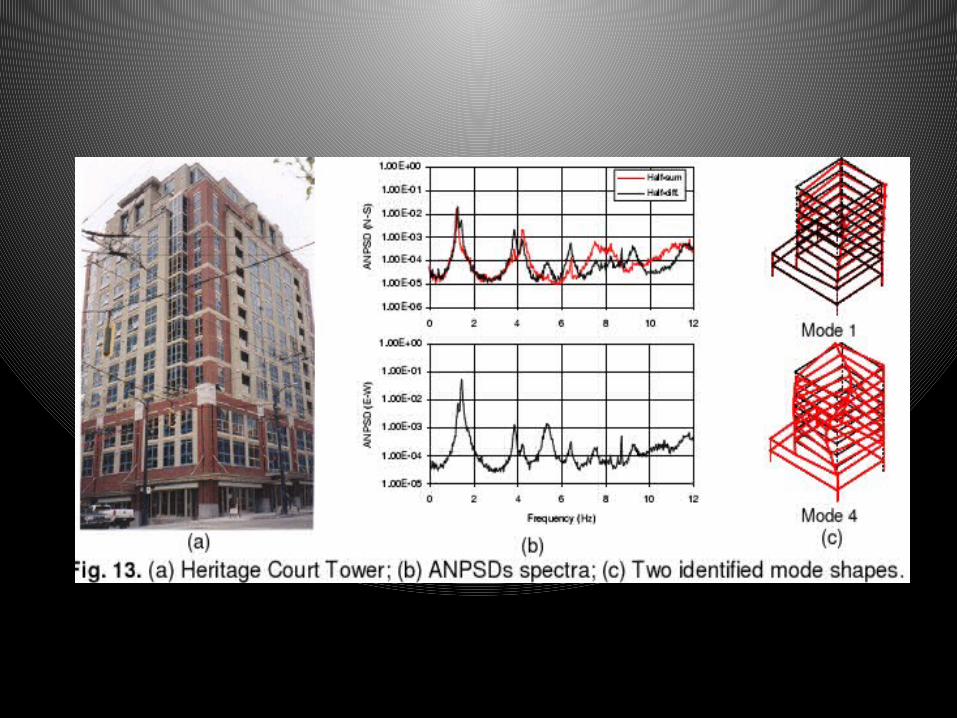
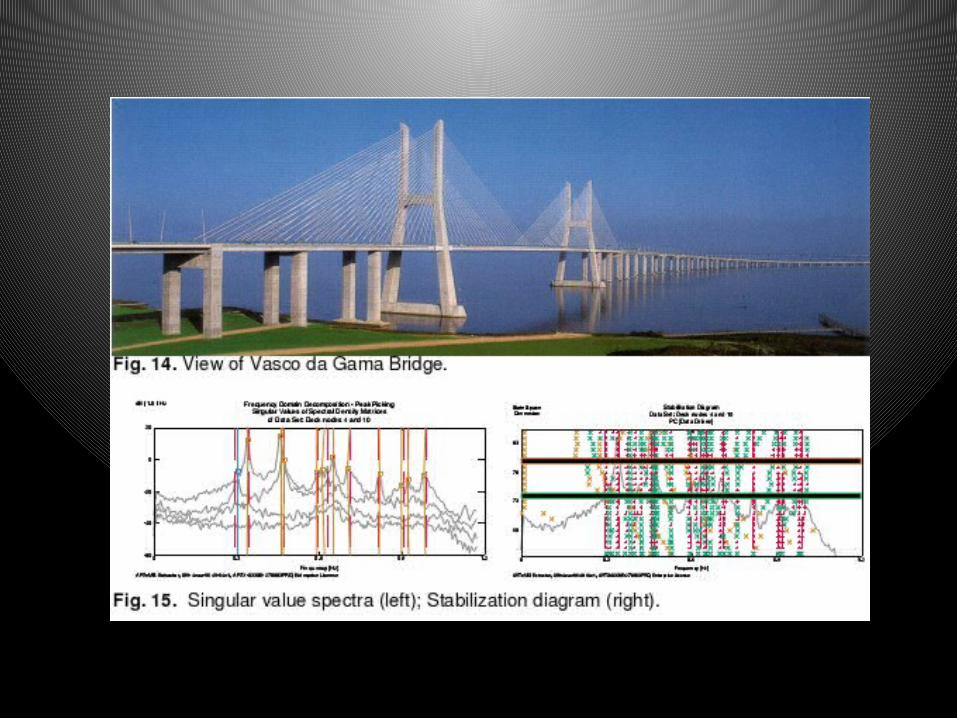
c) Aplicaciones de OMA


Referencias básicas
• “Modal idenfification from ambient responses using Frequency Domain Decomposition”; R. Brinker, L. Zhang, P. Andersen.
• “Why Output-Only Modal Testing is a desirable tool for a wide range of practical applications”; R. Brincker, C. E. Ventura, P. Andersen.
• “Modal testing: theory, practice and application”, D. J. Ewins
• “Vibration Monitoring”; Pelin Gundes Bakir; Erasmus Teaching, 2008.
• www. patent.com