actividades docentes en mecatrÓnica
TRANSCRIPT

ACTIVIDADES DOCENTES EN MECATRÓNICA
Pere PonsaDepartamento Enginyeria de Sistemes, Automática e Informática Industrial, ESAII
Universitat Politécnica de CatalunyaEUPVG, Av. Victor Balaguer s/n, 08800 Vilanova i la Geltrú
E-mail; [email protected] Tfno.93 896 77 98;Fax.93 896 77 00
Andreu CatalàDirector Escola Universitaria Politécnica Vilanova i la Geltrú
Universitat Politécnica de CatalunyaEUPVG, Av. Victor Balaguer s/n, 08800 Vilanova i la Geltrú
E-mail; [email protected]
Resumen
El presente trabajo muestra de forma aplicada comopotenciar la labor entre diferentes departamentospara el desarrollo de nuevas temáticas que puedanconsolidarse en futuros planes de estudio en escuelasuniversitarias técnicas. Los departamentosimplicados son actualmente el departamento deingeniería mecánica, el departamento de ingenieríaelectrónica y finalmente el departamento deingeniería de sistemas, automática e informáticaindustrial, todos ellos de la Escuela UniversitariaPolitécnica de Vilanova i la Geltrú perteneciente a laUniversitat Politécnica de Catalunya. El marco detrabajo sobre el que se pretende abordar éstaproblemática es la mecatrónica. Sin entrar endefiniciones ambiguas, la idea primordial quequeremos sirva de base en el futuro, es la integraciónde áreas como la mecánica, electrónica y automáticaen proyectos multidisciplinares.
Palabras Clave: mecatrónica, automatitzación,robótica
1 INTRODUCCIÓN
Un estudio panorámico sobre áreas de conocimientotécnico nos lleva a la observación que en entornosindustriales se sigue una evolución hacia tareasmultidisciplinares [8]. En la automatización de unproceso, por ejemplo, es necesaria la colaboraciónentre expertos de distintas áreas de conocimientodebido a la complejidad de los sistemas (diversastecnologías como el diseño de planta, la robotizaciónde tareas, la automatización electro-neumática, laseguridad, el mantenimiento, etc.). En este contexto,el operario está caracterizado como componente del
sistema, en el sentido de integrar su nivel deexperiencia junto a otros colaboradores parapotenciar el producto final.
Siguiendo con el ejemplo, en ésta área deconocimiento existe una gran dinámica que favorecela continua búsqueda de mejoras; el objetivo básicosigue siendo como adecuarse a los continuos cambiosde los sistemas productivos en el sentido deoptimizar los recursos disponibles. En este sentido,pues, hay que añadir a las tecnologías las habilidadespersonales y de equipo para evitar el desfase entreformación académica y realidad industrial [1], [15].
2 NIVELES JERÁRQUICOS
Un acercamiento a esta temática puede plantearsefragmentando el problema en aspectos máselementales. Distintos aspectos a tratar: nivel deplanta física, nivel organizacional y nivel de recursos.
2.1 Nivel de localización física
Una de las primeras actividades que estamosllevando a cabo es la creación de un Laboratorio deMecatrónica en el contexto de la automatizaciónindustrial. Un espacio físico concreto para eldesarrollo de prototipos [7], o para la puesta enmarcha de estaciones de trabajo [5], [12]. Lasprimeras iniciativas llevadas a cabo, de entre lasmuchas posibles, se resumen a modo de tres pautasprincipales en el apartado 3 de este texto.
Usualmente en los centros universitarios técnicos yase dispone de laboratorios divididos por temáticas.La formación del futuro ingeniero pasa por laaplicación y consolidación de los temas aprendidosen forma de prácticas de laboratorio en grupo. Estoslaboratorios pueden agruparse por separado en
temáticas como automatización de procesos, diseñomecánico de estructuras, o diseño y puesta enfuncionamiento de circuitos electrónicos, porejemplo.Nuestra propuesta consiste en realizar unaredistribución física. Diseñar un Laboratorio deMecatrónica, con actividades planificadas a medioplazo, orientadas a la integración del conocimiento.
El recorrido que se debería realizar es, en primerlugar el paso por el laboratorio tradicional, y ensegundo lugar el paso por el Laboratorio deMecatrónica. Éste espacio físico se concibe como unespacio para actividades en grupo para clasesaplicadas de problemas prácticos. Una segunda faseconsiste en potenciar el desarrollo de proyectosfinales de la titulación.
2.2 Nivel organizacional
Los expertos docentes en diversas materias puedenestablecer trabajos cooperativos entre estudiantes dedistintas titulaciones. En concreto un docente expertoen ingeniería mecánica puede establecer una línea detrabajo complementada por docentes en otras áreas.Pero esta metodología es variable, en el sentido deque puede adaptarse al problema en cuestión parapotenciar en mayor cuantía la parte de mecánica o laparte de electrónica, por ejemplo.
Las actividades de laboratorio no son actividadesaisladas sino que deben enmarcarse de formagenérica en los estudios técnicos. Aprovechando laposibilidad de ofrecer nuevas asignaturas y nuevoscontenidos en la revisión del plan de estudios, puedeofrecerse un contenido lectivo de Introducción a laMecatrónica de 9 créditos, con una combinación de 6créditos (teoría y problemas) y 3 créditos (prácticas).Los contenidos han de ser definidos en función decriterios genéricos que potencien la formación delestudiante. Para poder acceder a esta asignatura habráque planificar una base mínima de créditos. Laasignatura puede ofrecerse como optativa entitulaciones de Ingeniería Técnica Mecánica oIngeniería Técnica Electrónica por ejemplo. Esrecomendable también que el estudiante disponga de2 profesores de áreas de conocimiento distintas quepuedan aportarle distintas visiones.
2.3 Nivel de recursos materiales
En primer lugar se hace necesario un inventario delos bienes materiales ya disponibles para conocer sipermiten potenciar actividades conjuntas. Ensegundo lugar, es necesario planificar qué equiposhay que adquirir para dotarlos de la flexibilidadnecesaria para que sirvan a distintos intereses. Amodo de ejemplo, el Centro de Mecatrónica deGales, dispone como planta física un sistema de
fabricación flexible con estaciones de alimentación,mecanizado, ensamblaje y almacén [11]. Un sistemaflexible incorpora tecnologías diferentes puestas encolaboración lo que predispone a la integración deexpertos en distintas áreas para la consecución de unbuen rendimiento. A ello, se junta el hecho deltiempo limitado de vida de las máquinas lo quepermite plantear el rediseño de estaciones para suampliación o aspectos de mantenimiento. Unsegundo ejemplo consiste en la célula de fabricaciónflexible desarrollada en el Departamento deInformàtica de la Universitat Autónoma de Bacelona[9]. En ella, la flexibilidad del tipo de producto afabricar y el rendimiento de la célula, permiten eltrabajo conjunto de ingenieros informáticos,ingenieros electrónicos, y expertos del sectorindustrial.
Otra posibilidad distinta, - para no utilizar todos losrecursos en una planta centralizada-, consiste endiseñar puestos específicos de trabajo. Así, elLaboratorio de Mecatrónica se convierte en unbanco de pruebas temporal hasta que el producto seda por terminado. El producto puede exponerse o serutilizado para actividades docentes, y cede el espaciofísico a nuevos proyectos.
3 PRIMERAS ACTIVIDADES
Dentro del gran conjunto de posibles actividadesdestacamos las siguientes: diseño mecánico deconfiguraciones, robótica móvil, estaciones detrabajo automatizadas.
3.1 Diseño mecánico de configuraciones
La primera es el diseño mecánico de configuracionesde robots educacionales. Se trata de desarrollarprototipos de nuevas estructuras de robots con ladiscusión del número de ejes, disposición física deactuadores, disminución de inercias y esfuerzos sobrela estructura, estudio de fuerzas ficticias (Coriolis,centrífugas). El tema es amplio ya que puedeabordarse:
• diseño mecánico de elementos terminales:pinzas
• equipo de control electrónico de laestructura mecánica
• generación de la trayectoria con la soluciónde la cinemática directa e inversa
• creación de botonera de programaciónergonómica [10]
• entorno de programación abierto para lacomunicación entre el equipo de control delrobot y otros controladores

3.2 Robótica móbil
La segunda actividad consta de aportaciones en elárea de la robótica móvil: vehículos AGV ymicrorobots. La microrobótica se presta al continuoreto de nuevas aplicaciones y modificaciones en eldiseño original a bajo coste. Éste tema atraeenormemente a todo el colectivo científico hasta elpunto del desarrollo de investigación en agentesartificiales que permiten la colaboración demicrorobots en campeonatos internacionales defutbol. De forma más modesta, proponemos diseñosde plataformas físicas para la integración ydistribución del conjunto de sensores y actuadores.Mediante microcontrolador podemos potenciar elcambio de la aplicación del robot [3].
Se pretende extender esta área hacia diversasposibilidades como:
• diseño de una metodología para la creaciónde proyectos en microrobótica [14]
• diseño mecánico de micro-robots• diseño de tarjetas de circuito impreso para el
control de la estructura• integración multisensorial• programación y reprogramación de
microcontroladores• incorporación de algoritmos de control
basados en técnicas de inteligencia artificial(razonamiento cualitativo, redes neuronales,lógica fuzzy, entre otras).
3.3 Estaciones de trabajo automatizadas
La tercera actividad es el puente hacia el sectorindustrial a través del estudio de sistemas defabricación flexible (SFF). Disponemos de materialque nos permite plantear un conjunto de estaciones:vehículos AGV filoguiados [4], [6], manipuladoreselectroneumáticos para la carga y descarga demáquinas, comunicación entre PLC’s. Se pretendepotenciar el paso del control a la supervisión,atendiendo a la monitorización de las estaciones porparte del operario mediante entorno de programacióngráfico. Las estaciones pueden trabajar de formaautónoma o bien en tareas coordinadas (elaboraciónde un producto):
• diseño de puestos de trabajo automatizados• Estación con PC, PLC y maqueta industrial
con manipulador neumático de 3 ejes(Figura 1, Figura 2)
• Estación con PC, PLC y maqueta didácticade producción de FESTO
• Estación con PC, PLC y maqueta industrialcon manipulador cartesiano de 3 ejes para lacarga y descarga de máquinas (Figura 3)
• Estudio de la comunicación entrecontroladores para el trabajo cooperativoentre el manipulador cartesiano, el vehículoAGV [6] y los operarios
• Estudio del diseño de interacción persona-máquina: monitorización del proceso,accionamiento manual o automatico,aspectos de seguridad
Figura 1: Manipulador electro-neumático de 3 ejes
Figura 2: Control del manipulador: botonera, PLC yelectroválvulas
Las Figuras 1 y 2 muestran la estación formada porun manipulador electroneumático junto alcontrolador electrónico. Esta estación ha sidodiseñada en función de ejes neumáticos procedentesdel despiece de maquinaria industrial. En la parte dediseño, se ha hecho un estudio de la mejor
disposición de los ejes. Como parte de controlelectrónico, se ha dispuesto un autómata S5-95U deSiemens junto a un conjunto formado por 3electroválvulas de 5 vias y 3 posiciones [13]. Laintención a medio plazo, es diseñar y construir unelemento terminal para posibles aplicaciones de pickand place. Por otro lado, se está estudiando laposibilidad de cambio de control electrónico por otrobasado sobre el PC que permita el control continuode la posición mediante algoritmos basados en lógicafuzzy.
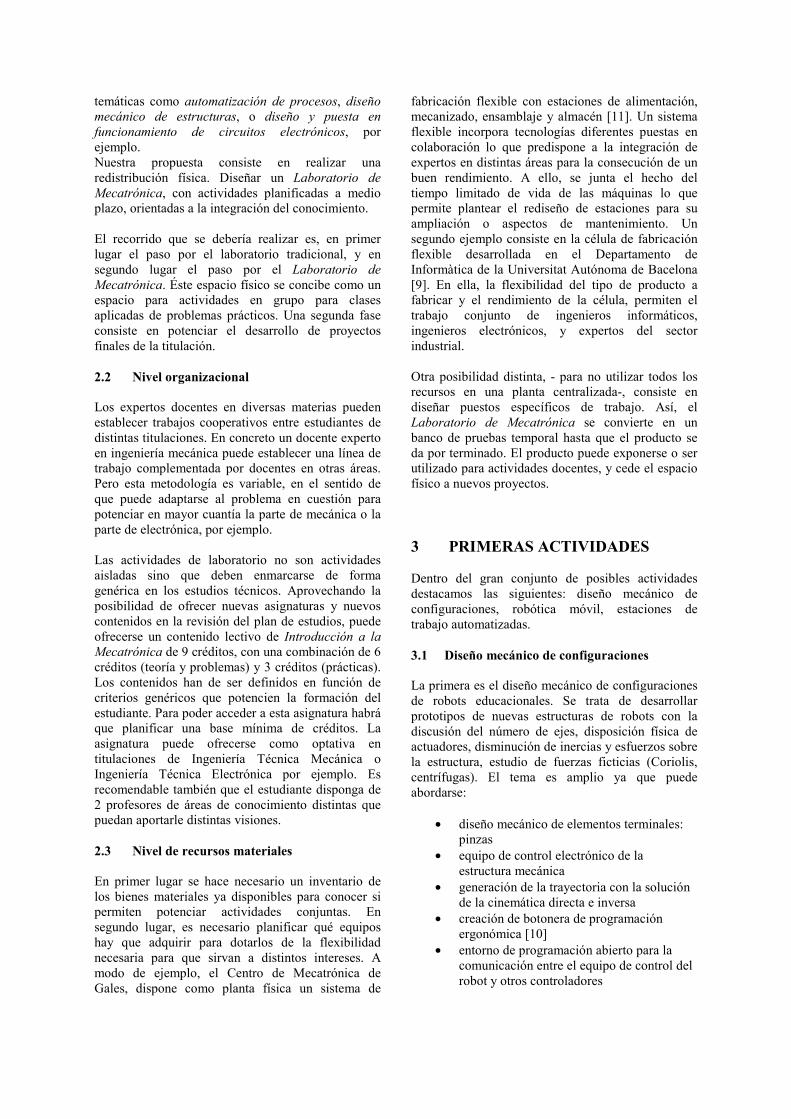
Figura 3: Manipulador industrial
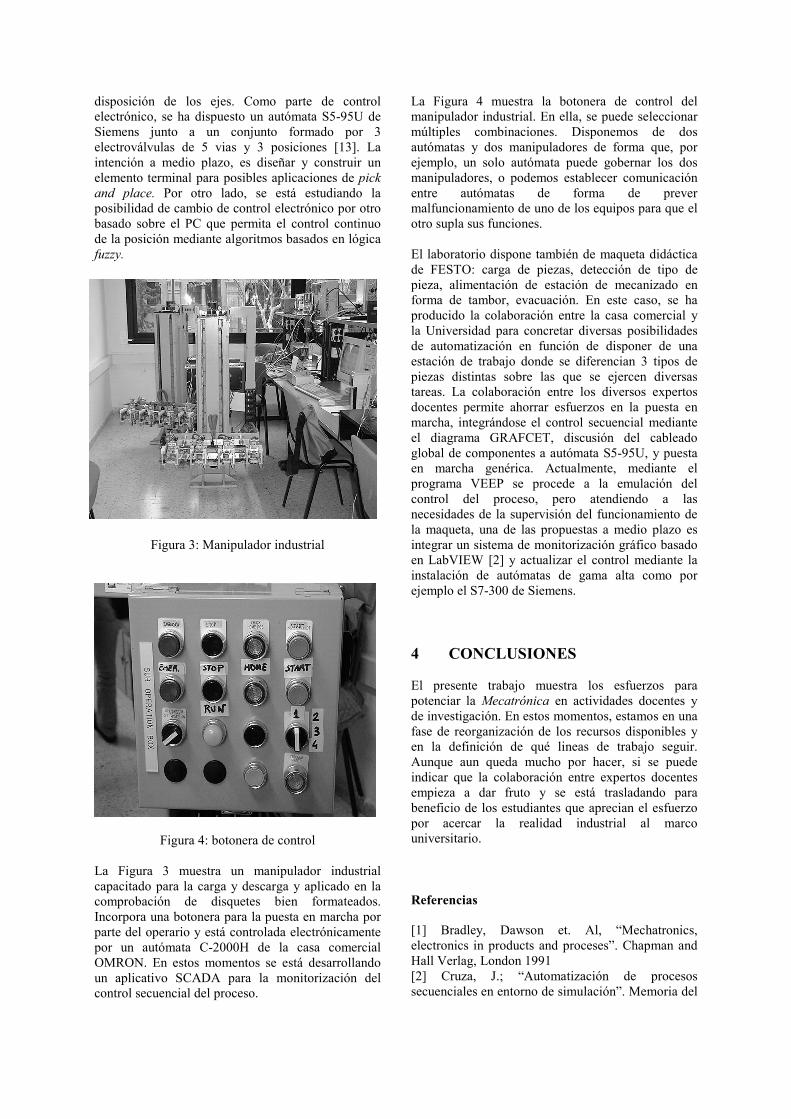
Figura 4: botonera de control
La Figura 3 muestra un manipulador industrialcapacitado para la carga y descarga y aplicado en lacomprobación de disquetes bien formateados.Incorpora una botonera para la puesta en marcha porparte del operario y está controlada electrónicamentepor un autómata C-2000H de la casa comercialOMRON. En estos momentos se está desarrollandoun aplicativo SCADA para la monitorización delcontrol secuencial del proceso.
La Figura 4 muestra la botonera de control delmanipulador industrial. En ella, se puede seleccionarmúltiples combinaciones. Disponemos de dosautómatas y dos manipuladores de forma que, porejemplo, un solo autómata puede gobernar los dosmanipuladores, o podemos establecer comunicaciónentre autómatas de forma de prevermalfuncionamiento de uno de los equipos para que elotro supla sus funciones.
El laboratorio dispone también de maqueta didácticade FESTO: carga de piezas, detección de tipo depieza, alimentación de estación de mecanizado enforma de tambor, evacuación. En este caso, se haproducido la colaboración entre la casa comercial yla Universidad para concretar diversas posibilidadesde automatización en función de disponer de unaestación de trabajo donde se diferencian 3 tipos depiezas distintas sobre las que se ejercen diversastareas. La colaboración entre los diversos expertosdocentes permite ahorrar esfuerzos en la puesta enmarcha, integrándose el control secuencial medianteel diagrama GRAFCET, discusión del cableadoglobal de componentes a autómata S5-95U, y puestaen marcha genérica. Actualmente, mediante elprograma VEEP se procede a la emulación delcontrol del proceso, pero atendiendo a lasnecesidades de la supervisión del funcionamiento dela maqueta, una de las propuestas a medio plazo esintegrar un sistema de monitorización gráfico basadoen LabVIEW [2] y actualizar el control mediante lainstalación de autómatas de gama alta como porejemplo el S7-300 de Siemens.
4 CONCLUSIONES
El presente trabajo muestra los esfuerzos parapotenciar la Mecatrónica en actividades docentes yde investigación. En estos momentos, estamos en unafase de reorganización de los recursos disponibles yen la definición de qué lineas de trabajo seguir.Aunque aun queda mucho por hacer, si se puedeindicar que la colaboración entre expertos docentesempieza a dar fruto y se está trasladando parabeneficio de los estudiantes que aprecian el esfuerzopor acercar la realidad industrial al marcouniversitario.
Referencias
[1] Bradley, Dawson et. Al, “Mechatronics,electronics in products and proceses”. Chapman andHall Verlag, London 1991[2] Cruza, J.; “Automatización de procesossecuenciales en entorno de simulación”. Memoria del

Proyecto Final de Carrrera dirigido por P. Ponsa,Universitat Politécnica de Catalunya, 2000[3] Dalmau, A., “Diseño, construcción yprogramación de un microbot”. Memoria delProyecto final de carrera, dirigido por P. Ponsa,Universitat Politécnica de Catalunya, 2000[4] González, S., “Sistema de navegación basado enmarcas visuales para un agente autónomo”. Memoriadel Proyecto final de carrera, dirigido por JoanSerrat, Departamento Informatica, UAB, 1997[5] Ikerlan, “Informe anual: 1995”. Centro deInvestigaciones Tecnologicas Ikerlan, 1995[6] Marcelo, O., “Estudio para la puesta en marchade un A.G.V.”. Memoria del Trabajo AcadémicoDirigido por P. Ponsa, Universitat Politécnica deCatalunya, documento interno, 2000[7] Mondragón, “Curso avanzado en ingeniería deproducto”. 1997. Mondragón Eskola Politeknikoa,1997[8] Ponsa, P.; “Disseny d’un sistema de fabricacióflexible”. Memoria del Trabajo de investigación deTercer ciclo. Departamento de Informatica, UAB,1998[9] Ponsa, P., Piera M. A., Vilanova, R., Serra, I.;“Diseño de una línea didáctica de producción”. En 5º
Congreo de AER/ATP, Las nuevas fronteras de laautomatización, 17-19 septiembre, Bilbao, 1997[10] Puigpinós, D., “Disseny de l’aplicació i del’interface d’un robot”. Memoria del Proyecto finalde carrera dirigido por M.A. Piera, DepartamentoInformatica, Universitat Autónoma de Barcelona,1998[11] Roberts, G. N., “Mechatronics Research Centre.Activity Report: December 1997”. University ofWales College, 1997[12] Robotiker, “Memoria de actividades: 1999”.Robotiker, 1999.[13] Roca, G., “Puesta en marcha de manipuladorelectroneumático de 3 ejes”. Memoria del TrabajoAcadémico Dirigido por P. Ponsa, UniversitatPolitécnica de Catalunya, documento interno, 2001[14] Torrens, C., “Buiding a mobile robot as anexcellent graduating exercise”. En el congresoRET2001 1st Workshop on Robotics Education andTraining, Ed. A. Casals, A. Grau, Weingarten,Germany 2001[15] Williams, M., “Introducction to mechatronics”.Festo Didactic Group, 1997