3 apunte matrices.pdf
TRANSCRIPT

Matrices
Version Enero de 2010
Pontificia Universidad Catolica de Chile
Indice
1. Transformaciones lineales de Rn en R
m 11.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2. Transformaciones lineales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.3. Matriz canonica de una transformacion lineal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2. Operaciones matriciales 72.1. Suma de matrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2. Ponderacion de matrices por un escalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.3. Multiplicacion de matrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92.4. La matriz transpuesta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.5. La notacion A = (aij) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3. Transformaciones lineales inyectivas y sobreyectivas. 16
4. Matrices inversas 204.1. Calculo de inversas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.1.1. Inversas por la derecha . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224.1.2. Inversas por la izquierda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
5. Inversas de matrices cuadradas 24

1. Transformaciones lineales de Rn en Rm
1.1. Introduccion
Hasta ahora, nuestro uso de matrices en sistemas de ecuaciones lineales nos ha permitido sistematizar nuestrotrabajo de resolucion y realizar un analisis, a traves de la definicion de rango gaussiano, del numero de solucionesque tendremos. Pero esencialmente las matrices han actuado como una notacion abreviada para hacer mas eficientenuestro trabajo, ya que toda la teorıa desarrollada podrıa realizarse, ciertamente con un lenguaje mucho mascomplejo, de igual forma con la escritura completa de los sistemas de ecuaciones lineales.
A continuacion, estudiaremos las matrices desde un punto de vista distinto. El enfoque de este capıtulo se basaen la definicion del producto de una matriz A por un vector −→x , que entrega una vision vectorial (y geometrica) delos sistemas de ecuaciones lineales.
Recordemos que toda matriz A de m × n (es decir, A tiene m filas y n columnas) se puede multiplicar porcualquier vector −→x ∈ Rn y que la definicion del producto A−→x se realiza describiendo la matriz por sus columnas:
A =[ −→c1
∣∣ −→c2∣∣ · · ·
∣∣ −→cn],
donde los vectores columnas de A, −→c1 ,−→c2 , . . . ,
−→cn, pertenecen a Rm. Entonces:
A−→x =[ −→c1
∣∣ −→c2∣∣ · · ·
∣∣ −→cn]
x1
x2
...xn
= x1
−→c1 + x2−→c2 + · · ·+ xn
−→cn
Por tanto, al multiplicarlo por A, a cada vector −→x ∈ Rn le corresponde un unico vector −→y ∈ Rm. Es decir, lamultiplicacion por A define una funcion de Rn en Rm:
TA : Rn −→ Rm
−→x 7−→ TA(−→x ) = A−→x
Esta nocion funcional de las matrices nos permitira estudiar nuevas propiedades de ellas, no relacionadas direc-tamente con los sistemas de ecuaciones lineales.
1.2. Transformaciones lineales
Definicion: Una transformacion lineal (tl) de Rn en Rm es una funcion
T : Rn −→ Rm
que cumple las siguientes propiedades:
(i) T (−→x1 +−→x2) = T (−→x1) + T (−→x2)
(ii) T (α−→x1) = α T (−→x1)
donde α ∈ R y −→x1,−→x2 ∈ Rn.
Ejemplos:
1. Consideremos varias funciones T : R −→ R:
a) T (x) = x es tl, pues T (x1 + x2) = x1 + x2 = T (x1) + T (x2) y T (αx1) = αx = αT (x).
b) T (x) = x2 no es tl, pues T (x1+x2) = (x1+x2)2, T (x1)+T (x2) = x2
1+x22 y, en general, x2
1+x22 6= (x1+x2)
2.
c) T (x) = sen(x) tampoco es tl, pues sen(x+ y) 6= sen(x) + sen(y).
1

d) Pronto probaremos que las unicas transformaciones lineales de R en R son las rectas no verticales quepasan por el origen:
T (x) = mx, para los distintos valores de m ∈ R.
De hecho, las rectas deben pasar por el origen, pues una propiedad general de las tl es la siguiente:
Si T : Rn −→ Rm es una tl, entonces T (0) = 0.
Lo que es claro, pues T (0) = T (0 + 0) = T (0) + T (0) =⇒ T (0) = 0.
2. La funcion T : R2 −→ R3, definida por
T (x, y) = (3x− 2y,−x, y)
es una tl, pues
T((a, b) + (c, d)
)= T
(a+ c, b+ d
)
=(3(a+ c)− 2(b+ d),−(a+ c), (b+ d)
)
=(3a− 2b,−a, b
)+(3c− 2d,−c, d
)
= T(a, b)+ T
(c, d)
y
T(α(a, b)
)= T
(αa, αb
)
=(3αa− 2αb,−αa, αb
)
= α(3a− 2b,−a, b
)
= αT(a, b)
3. Si consideramos una matriz fija A dem×n, tenemos que la funcion TA : Rn −→ Rm definida por TA(
−→x ) = A−→xes una tl, pues
TA(−→x1 +
−→x2) = A(−→x1 +−→x2) = A−→x1 +A−→x2 = TA(
−→x1) + TA(−→x2)
yTA(α
−→x1) = A(α−→x1) = αA−→x1 = αTA(−→x1)
por las propiedades del producto A−→x .
Mas adelante, probaremos que todas las transformaciones lineales de Rn en Rm seran del tipo de la tl del ejemplo3.
Por ahora, nos enfocaremos en la naturaleza funcional de las transformaciones lineales. Probaremos que las tlse pueden sumar, ponderar y componer, manteniendo sus propiedades.
Teorema. Sean T1 : Rn −→ Rm y T2 : Rn −→ Rm dos transformaciones lineales. Entonces la funcion sumaT1 + T2 tambien es una tl de Rn en Rm.
Demostracion. La funcion suma T1 + T2 se define por
(T1 + T2)(−→x ) = T1(
−→x ) + T2(−→x ).
Si u y v son dos vectores de Rn y α ∈ R, entonces
(i)
(T1 + T2)(u + v) = T1(u + v) + T2(u+ v) (definicion de T1 + T2)
= T1(u) + T1(v) + T2(u) + T2(v) (T1 y T2 son tl)
= (T1(u) + T2(u)) + (T1(v) + T2(v))
= (T1 + T2)(u) + (T1 + T2)(v) (definicion de T1 + T2)
2

(ii)
(T1 + T2)(αu) = T1(αu) + T2(αu) (definicion de T1 + T2)
= αT1(u) + αT2(u) (T1 y T2 son tl)
= α(T1(u) + T2(u))
= α(T1 + T2)(u) (definicion de T1 + T2)
Luego, hemos probado que la funcion T1 + T2 es una tl de Rn en Rm.
Teorema. Sea T : Rn −→ Rm una transformacion lineal y λ una constante real. Entonces la funcion ponderacionλT tambien es una tl de Rn en Rm.
Demostracion. La funcion suma λT se define por
(λT )(−→x ) = λT (−→x ).
Si u y v son dos vectores de Rn y α ∈ R, entonces
(i)
(λT )(u + v) = λT (u+ v) (definicion de λT )
= λ(T (u) + T (v)
)(T es tl)
= λT (u) + λT (v)
= (λT )(u) + (λT )(v) (definicion de λT )
(ii)
(λT )(αu) = λT (αu) (definicion de λT )
= λ(αT (u)
)(T es tl)
= αλT (u)
= α(λT )(u) (definicion de λT )
Con lo que hemos demostrado que la funcion λT es una tl de Rn en Rm.
Teorema. Sean T : Rn −→ Rm y S : Rm −→ Rp dos transformaciones lineales. Entonces la funcion composicionS ◦ T es una tl de Rn en Rp.
Demostracion. La funcion composicion S ◦ T se define por
(S ◦ T )(−→x ) = S(T (−→x )
).
Si u y v son dos vectores de Rn y α ∈ R, entonces
(i)
(S ◦ T )(u+ v) = S(T (u+ v)
)(definicion de S ◦ T )
= S(T (u) + T (v)
)(T es tl)
= S(T (u))
)+ S
(T (v)
)(S es tl)
= (S ◦ T )(u) + (S ◦ T )(v) (definicion de S ◦ T )
3

(ii)
(S ◦ T )(αu) = S(T (αu)
)(definicion de S ◦ T )
= S(αT (u)
)(T es tl)
= αS(T (u)
)(S es tl)
= α(S ◦ T )(u) (definicion de S ◦ T )
Y hemos probado que la funcion S ◦ T es una tl de Rn en Rp.
Nota : La operacion de multiplicacion de funciones que se realiza en funciones reales, no tendra sentido engeneral, pues para los vectores de R
m, con m 6= 1, no se ha definido ninguna multiplicacion. Esto no implicaninguna perdida importante, pues si T1 : R −→ R y T2 : R −→ R son las tl T1(x) = x y T2(x) = 4x, entoncesla funcion producto T1 · T2, que esta definida por (T1 · T2)(x) = T1(x) · T2(x) = 4x2, no es tl de R en R, pues(T1 ·T2)(1+1) = (T1 ·T2)(2) = 4 ·22 = 16 mientras que (T1 ·T2)(1)+ (T1 ·T2)(1) = 2(T1 ·T2)(1) = 2 ·4 ·12 = 8 6= 16.Es decir, aunque tuvieramos definida la multiplicacion de vectores en Rm, aun ası no podrıamos garantizar que elproducto de transformaciones lineales siguiera siendo una tl.
1.3. Matriz canonica de una transformacion lineal
Ya vimos que dada una matriz A de m× n, podemos definir una tl TA : Rn −→ Rm por
TA(x) = Ax.
Ahora, veremos que, ademas, para cada transformacion lineal T : Rn −→ Rm podemos encontrar una matriz B
de m× n tal que∀x ∈ R
n T (x) = Bx.
Definicion: Sea n ∈ N, fijo. Llamaremos vectores canonicos de Rn a los vectores
e1 = (1, 0, 0, . . . , 0, 0)
e2 = (0, 1, 0, . . . , 0, 0)
e3 = (0, 0, 1, . . . , 0, 0)
...
en−1 = (0, 0, 0, . . . , 1, 0)
en = (0, 0, 0, . . . , 0, 1)
Es decir, los vectores canonicos son los n vectores que apuntan en las direcciones de los ejes coordenados (tienentodas sus coordenadas iguales a cero, excepto una que es un uno).
Claramente, los vectores canonicos de Rn son unitarios (‖ei‖ = 1) y tomados de a pares son ortogonales (si i 6= j,se tiene que ei · ej = 0). Pero sus principales caracterısticas son que {e1, e2, . . . , en} es un conjunto de vectores lide Rn y que todo vector x = (x1, x2, x3, . . . , xn) ∈ Rn se escribe de manera unica (y obvia) como cl de los vectorescanonicos:
x = x1e1 + x2e2 + · · ·+ xnen.
(Los coeficientes de la cl son las componentes de x).Ahora, supongamos que conocemos la definicion de una tl T : Rn −→ Rm. Queremos determinar una matriz B
tal queT (x) = Bx
4

para todo vector x ∈ Rn. Para esto, notemos que
T (x) = T(x1e1 + x2e2 + · · ·+ xnen
)
= x1T (en) + x2T (e2) + · · ·+ xnT (en)
=[T (e1) T (e2) · · · T (en)
]
x1
x2
...xn
donde hemos obtenido la ultima igualdad directamente de la definicion de multiplicacion matriz–vector. De estamanera, si llamamos B a la matriz formada por columnas por los vectores de Rm: T (e1), T (e2), . . . , T (en),obtendremos que la propiedad T (x) = Bx.
Definicion: Dada una tl T : Rn −→ Rm, la matriz de m× n
B =[T (e1) T (e2) · · · T (en)
]
es la matriz canonica de la transformacion lineal T .
Nota : Con esto, hemos probado que hay una relacion de correspondencia “una a una” entre las matrices y lastransformaciones lineales:
Dada una matriz A se define la transformacion lineal TA por TA(x) = Ax.
Dada una tl T podemos considerar su matriz canonica AT que cumple T (x) = ATx.
Ademas, se tiene que si partimos con una matriz A, obtenemos TA y calculamos la matriz canonica de TA, volvemosa A. Analogamente, si partimos de una tl S, obtenemos su matriz canonica AS y calculamos la tl TAS
, volvemos aS.
Ejemplos:
1. Sea T : R4 −→ R2 la tl definida por
T (x, y, z, t) = (3x+ 8y − t, 7y + z − 2t)
Entonces:
T (e1) = T (1, 0, 0, 0) = (3, 0)
T (e2) = T (0, 1, 0, 0) = (8, 7)
T (e3) = T (0, 0, 1, 0) = (0, 1)
T (e4) = T (0, 0, 0, 1) = (−1,−2)
Y la matriz canonica de T es
A =
(3 8 0 −10 7 1 −2
)
Comprobemos que T (−→x ) = A−→x para todo −→x ∈ R4:
A−→x =
(3 8 0 −10 7 1 −2
)
x
y
z
t
= x
(30
)+ y
(87
)+ z
(01
)+ t
(−1−2
)
=
(3x+ 8y − t
7y + z − 2t
)= T (x, y, z, t)
5

2. Sea −→a = (a1, a2, a3, . . . , an) ∈ Rn, fijo. Entonces la funcion L : Rn −→ R definida por L(−→x ) = −→a · −→x es unatl (Compruebelo). Su matriz canonica tendra una fila y n columnas:
B =[L(e1) | L(e2) | · · · | L(en)
]=[a1 | a2 | · · · | an
]
3. Veamos una aplicacion de la matriz canonica de una tl. Consideremos la funcion S : R3 −→ R3 definida por
S(−→x ) = −→x − 2−→a · −→x−→a · −→a
−→a
donde −→a = (2, 1,−1).
Queremos determinar todos los vectores −→x de R3 que cumplen S(−→x ) = (1, 2, 3), todos los vectores −→x ∈ R3
tales que S(−→x ) = −→a y todos los vectores −→x 6=−→0 tales que S(−→x ) = −→x .
Pero de la definicion de S es bastante “engorroso” llegar a una respuesta para estas preguntas. En cambio,es relativamente directo probar que S es una transformacion lineal (¡hagalo!), por tanto, podemos determinarsu matriz canonica:
S(e1) = e1 − 2(2, 1,−1) · e1
(2, 1,−1) · (2, 1,−1)(2, 1,−1) = (1, 0, 0)−
2
3(2, 1,−1) =
(−1
3,−
2
3,2
3
)
S(e2) = e2 − 2(2, 1,−1) · e2
6(2, 1,−1) = (0, 1, 0)−
1
3(2, 1,−1) =
(−2
3,2
3,1
3
)
S(e3) = e3 − 2(2, 1,−1) · e3
6(2, 1,−1) = (0, 0, 1) +
1
3(2, 1,−1) =
(2
3,1
3,2
3
)
Luego,
A =
− 1
3− 2
3
2
3
− 2
3
2
3
1
3
2
3
1
3
2
3
es la matriz canonica de S, es decir, S(−→x ) = A−→x . Ahora, nuestras preguntas se reducen a resolver los sistemas
− 1
3− 2
3
2
3
− 2
3
2
3
1
3
2
3
1
3
2
3
x
y
z
=
123
− 1
3− 2
3
2
3
− 2
3
2
3
1
3
2
3
1
3
2
3
x
y
z
=
21
−1
y
− 1
3− 2
3
2
3
− 2
3
2
3
1
3
2
3
1
3
2
3
x
y
z
=
x
y
z
Los primeros dos sistemas se pueden resolver simultaneamente:
− 1
3− 2
3
2
31 2
− 2
3
2
3
1
32 1
2
3
1
3
2
33 −1
F2 − 2F1
F3 + 2F1
∼
− 1
3− 2
3
2
31 2
0 2 −1 0 −3
0 −1 2 5 3
(−3) · F1
F3 +1
2F1
1 2 −2 −3 −6
0 2 −1 0 −3
0 0 3
25 3
2
F1 − F2
2
3· F3
∼
1 0 −1 −3 −3
0 2 −1 0 −3
0 0 1 10
31
F1 + F3
F2 + F3
∼
1 0 0 1
3−2
0 2 0 10
3−2
0 0 1 10
31
1
2F2 ∼
1 0 0 1
3−2
0 1 0 5
3−1
0 0 1 10
31
6

Luego, el unico −→x que cumple S(−→x ) = (1, 2, 3) es −→x =(1
3, 5
3, 10
3
)y el unico −→x que cumple S(−→x ) = −→a es
−→x = (−2,−1, 1) = −−→a .
Por ultimo, debemos resolver el sistema A−→x = −→x . Pero no podemos aplicar aquı, nuestro metodo usualdebido a que las variables del sistema se encuentran en ambos terminos de esta ecuacion. Debemos “ordenar”nuestras ecuaciones:
− 1
3− 2
3
2
3
− 2
3
2
3
1
3
2
3
1
3
2
3
x
y
z
=
x
y
z
⇐⇒
− 1
3x− 2
3y + 2
3z
− 2
3x+ 2
3y + 1
3z
2
3x+ 1
3y + 2
3z
=
x
y
z
⇐⇒
− 4
3x− 2
3y + 2
3z
− 2
3x− 1
3y + 1
3z
2
3x+ 1
3y − 1
3z
=
0
0
0
Ahora resolvemos el sistema homogeneo resultante:
− 4
3− 2
3
2
3
− 2
3− 1
3
1
3
2
3
1
3− 1
3
∼
− 4
3− 2
3
2
3
0 0 0
0 0 0
=⇒ −
4
3x−
2
3y +
2
3z = 0 ⇐⇒ 2x+ y − z = 0
Luego, los vectores −→x tales que S(−→x ) = −→x forman el plano 2x+ y− z = 0. Para concluir el ejemplo, notemosque la ultima pregunta es mas facil de responder directamente de la definicion de S, pues
S(−→x ) = −→x ⇐⇒ −→x − 2−→a · −→x−→a · −→a
−→a = −→x ⇐⇒ 2−→a · −→x−→a · −→a
−→a =−→0 ,
pero como −→a = (2, 1,−1) 6=−→0 la ultima igualdad se cumplira si y solo si −→a · −→x = 0, es decir, si y solo si
2x+ y − z = 0.
2. Operaciones matriciales
Es esta seccion definiremos las cuatro operaciones basicas que pueden realizarse con matrices: suma, ponderacionpor escalar, multiplicacion y trasposicion. Veremos que su definicion nace naturalmente de la relacion de las matricescon las transformaciones lineales.
2.1. Suma de matrices
Sean T : Rn −→ Rm una tl con matriz canonica A y S : Rn −→ Rm una tl con matriz canonica B y describamosambas matrices por columnas:
A =[a1
∣∣∣ a2∣∣∣ · · ·
∣∣∣ an]
y B =[b1
∣∣∣ b2∣∣∣ · · ·
∣∣∣ bn].
Ya probamos que la funcion T +S tambien es una transformacion lineal de Rn a Rm. Ademas, como T (x) = Ax
y S(x) = Bx, tendremos para todo x ∈ Rn que
(T + S)(x) = T (x) + S(x) = Ax+Bx.
Definiremos la matriz suma A+B como la matriz canonica de la tl T + S. Entonces:
A+B =[(T + S)(e1)
∣∣∣ (T + S)(e2)∣∣∣ · · ·
∣∣∣ (T + S)(en)]
=[Ae1 +Be1
∣∣∣ Ae2 +Be2
∣∣∣ · · ·∣∣∣ Aen +Ben
]
=[a1 + b1
∣∣∣ a2 + b2
∣∣∣ · · ·∣∣∣ an + bn
]
Ası, las columnas de A+B corresponden a las sumas de las correspondientes columnas de A y de B.
Nota : Para que dos funciones puedan sumarse deben compartir su dominio y codominio. Es nuestro caso, paraque dos matrices puedan sumarse debe tener el mismo numero de filas y el mismo numero de columnas.
7

Ejemplos:
1. Consideramos las matrices A =
1 23 45 6
y B =
0 48 21 2
. Entonces, la matriz suma es
A+B =
1 23 45 6
+
0 48 21 2
=
135
+
081
246
+
422
=
1 611 66 8
Ası, tenemos que la matriz suma A + B se calcula sumando componente a componente los elementos corre-spondientes de A y de B (como lo hacemos con los vectores).
2. Si se sabe que C =
(1 −2 7 9 80 8 −2 4 1
)es la matriz canonica de la tl T+S y que D =
(−2 0 1 1 14 2 −2 1 4
)
es la matriz canonica de T , ¿como podemos determinar la matriz canonica de S?
La respuesta natural es: restando las matrices de T + S y T . Pero, ¿como definimos la resta? Tambien esnatural cuando pensamos la suma por componentes. Ası, la matriz canonica de S sera
E = C −D =
(1 −2 7 9 80 8 −2 4 1
)−
(−2 0 1 1 14 2 −2 1 4
)=
(3 −2 6 8 7−4 6 0 3 −3
)
Ası, podemos pensar en inversos aditivos de matrices. Si A =
(1 1 11 1 1
), entonces su inversa aditiva es
−A =
(−1 −1 −1−1 −1 −1
), pues A+ (−A) = O, donde O es la matriz que solo contiene ceros.
Propiedades de la suma de matrices
Consideraremos solo matrices de m× n.
1. A+B = B +A (La suma es conmutativa).
2. A+ (B + C) = (A+B) + C (La suma es asociativa).
3. La matriz compuesta solo por ceros, que anotaremos O, es el neutro aditivo de la suma de matrices. Es decir,para cualquier matriz A se tiene que A+O = O+A = A.
4. Dada una matriz fija A, existe una matriz inversa aditiva (−A), que contiene a los inversos aditivos de loselementos de A y que cumple: A+ (−A) = (−A) +A = O.
2.2. Ponderacion de matrices por un escalar
Sea T : Rn −→ Rm una tl con matriz canonica A =[a1
∣∣∣ a2∣∣∣ · · ·
∣∣∣ an]y sea λ un numero real fijo.
Ya demostramos que la funcion λT tambien es una tl de Rn a Rm. Definiremos λA para que sea la matrizcanonica de λT . Y como tenemos que (λT )(x) = λ(T (x)) = λ(Ax), entonces
λA =[(λT )(e1)
∣∣∣ (λT )(e2)∣∣∣ · · ·
∣∣∣ (λT )(en)]
=[λ(Ae1)
∣∣∣ λ(Ae2)∣∣∣ · · ·
∣∣∣ λ(Aen)]
=[λa1
∣∣∣ λa2∣∣∣ · · ·
∣∣∣ λan]
Ası, las columnas λA se obtienen ponderando las correspondientes columnas de A por λ.
8

Ejemplo:
Si A =
3 2 4 −10 0 8 2−2 2 3 1
, entonces la matriz 3A es
3A =
9 6 12 −30 0 24 6−6 6 9 3
.
Es decir, la ponderacion se realiza componente a componente, multiplicando cada elemento de la matriz por 3.
Analogamente, la matriz
− 1
3− 2
3
2
3
− 2
3
2
3
1
3
2
3
1
3
2
3
tiene un factor comun 1
3en todos sus elementos. Entonces
− 1
3− 2
3
2
3
− 2
3
2
3
1
3
2
3
1
3
2
3
=
1
3
−1 −2 2
−2 2 1
2 1 2
La ponderacion de una matriz por un escalar, satisface propiedades analogas a las de la ponderacion de vectoresde R
n.
Propiedades de la ponderacion escalar de matrices
Consideramos solo matrices de m× n, α y β son escalares.
1. (α+ β)A = αA+ βA.
2. α(A+B) = αA+ αB.
3. (αβ)A = α(βA) = β(αA).
4. 1A = A, (−1)A = −A y 0A = O.
2.3. Multiplicacion de matrices
Lo primero que diremos es que la multiplicacion de matrices NO CORRESPONDE a la multiplicacion detransformaciones lineales. Recordemos que la multiplicacion de funciones de Rn en Rm ni siquiera esta definida.
Dicho esto, veremos que el producto de matrices sı corresponde a la composicion de transformaciones lineales.
Sea T : Rm −→ Rp una tl con matriz canonica A =[a1
∣∣∣ a2∣∣∣ · · ·
∣∣∣ am]y sea S : Rn −→ Rm una tl con matriz
canonica B =[b1
∣∣∣ b2∣∣∣ · · ·
∣∣∣ bn].
Podemos calcular la funcion compuesta (T ◦ S) y ya probamos que esta funcion es una tl de Rn a R
p. Ademas,notemos que para todo x ∈ Rn tendremos que y = Bx ∈ Rm y que
(T ◦ S)(x) = T(S(x)
)= T
(Bx)
Entonces definimos AB de modo que sea la matriz canonica de T ◦ S. Ası,
AB =[(T ◦ S)(e1)
∣∣∣ (T ◦ S)(e2)∣∣∣ · · ·
∣∣∣ (T ◦ S)(en)]
=[T(S(e1)
) ∣∣∣ T(S(e2)
) ∣∣∣ · · ·∣∣∣ T(S(en)
) ]
=[T (Be1)
∣∣∣ T (Be2)∣∣∣ · · ·
∣∣∣ T (Ben)]
=[T (b1)
∣∣∣ T (b2)∣∣∣ · · ·
∣∣∣ T (bn)]
9

Ahora, recordemos que b1, b2, . . . , bn son los vectores columnas de B. Luego todos ellos pertenecen a Rm, ası,T (b1) = Ab1, T (b2) = Ab2, . . . , T (bn) = Abn.
Ası, la matriz producto queda definida por
AB = A[b1
∣∣∣ b2∣∣∣ · · ·
∣∣∣ bn]=[Ab1
∣∣∣ Ab2∣∣∣ · · ·
∣∣∣ Abn]
y cada columna de AB es el producto de la matriz A por el vector columna correspondiente de B.
Nota : Para saber cuando dos matrices pueden multiplicarse, debemos preguntarnos cuando dos tl pueden com-ponerse. Claramente, necesitaremos que el codominio de la primera tl coincida con el dominio de la segunda tl. Esdecir, para poder componer T con S : Rn −→ Rm, necesitamos que el dominio de T sea Rm (su codominio es Rp
con cualquier valor natural de p). Entonces, T ◦ S : Rn −→ Rp. En lenguaje de matrices, tenemos que la matrizcanonica de T es de p×m, la matriz canonica de S es de m× n y la matriz canonica de T ◦ S es de p× n:
Ap×mBm×n = (AB)p×n
Luego, dos matrices podran multiplicarse si el numero de columnas del primer factor (A) coincide con el numero defilas del segundo factor (B). Ademas, la matriz producto (AB) tiene el mismo numero de filas que el primer factory el mismo numero de columnas que el segundo factor.
Ejemplos:
1. Consideremos las matrices A =
(1 48 2
), B =
(1 3 −1 42 0 0 6
)y C =
2 62 11 19 08 5
.
Los productos posibles de realizar son: AB, CA y CB. Calculemos cada uno de ellos.
AB = A
(1 3 −1 42 0 0 6
)=
[A
(12
)A
(30
)A
(−10
)A
(46
) ]=
(9 3 −1 2812 24 −8 44
)
CA = C
(1 48 2
)=
[C
(18
)C
(42
) ]
Notemos que para multiplicar C por cada columna de A, realizaremos el producto punto de cada fila de C
con la columna correspondiente de A. Es decir,
C
(18
)=
2 62 11 19 08 5
(18
)=
2 · 1 + 6 · 82 · 1 + 1 · 81 · 1 + 1 · 89 · 1 + 0 · 88 · 1 + 5 · 8
=
50109948
Analogamente,
C
(42
)=
2 62 11 19 08 5
(42
)=
2 · 4 + 6 · 22 · 4 + 1 · 21 · 4 + 1 · 29 · 4 + 0 · 28 · 4 + 5 · 2
=
201063642
Entonces CA =
50 2010 109 69 3648 42
.
10

Ası, podemos notar que el elemento en el lugar (i, j) de la matriz CA es el producto punto de la fila i-esima deC por la columna j-esima de A. Por ejemplo, el 6 que esta en la posicion (3, 2) de la matriz CA es el productopunto de la fila 3 de C por la columna 2 de A: (1, 1) · (4, 2) = 6.
Multipliquemos, C por B usando este enfoque.
CB =
2 62 11 19 08 5
(1 3 −1 42 0 0 6
)=
14 6 −2 444 6 −2 143 3 −1 109 27 −9 3618 24 −8 62
Tenemos en azul que 14 = 2 · 1 + 6 · 2 = (2, 6) · (1, 2); y en rojo, que 36 = 9 · 4 + 0 · 6 = (9, 0) · (4, 6).
2. Consideremos las matrices J =
(1 2 34 5 6
)y K =
1 23 45 6
.
En este caso realizar tanto el producto KJ como el producto JK, pero claramente estos productos serandistintos, pues:
J2×3K3×2 = (JK)2×2 K3×2J2×3 = (KJ)3×3
Calcule ambos productos.
Es claro, entonces, que la multiplicacion de matrices no es una operacion conmutativa. Pero esto no es tansorprendente si recordamos la relacion entre el producto de matrices y la composicion de funciones (otraoperacion no conmutativa).
3. Consideremos las matrices D =
2 4 01 1 10 5 4
y E =
2 19 02 4
.
¿Existe una matriz X tal que DX = E?
Si existiera tal matriz X , deberıa tener 3 filas y 2 columnas (¿por que?). Describamos la matriz desconocidaX por columnas:
X =[x1
∣∣∣ x2
],
donde cada vector x1 y x2 pertenece a R3. Entonces podemos considerar nuestra ecuacion matricial de otraforma:
DX = E ⇐⇒ D[x1
∣∣∣ x2
]= E ⇐⇒
[Dx1
∣∣∣ Dx2
]= E
Y comparando cada columna, tenemos que para encontrar la matrizX basta resolver los sistemas de ecuaciones
Dx1 =
292
Dx2 =
104
Los resolveremos simultaneamente:
2 4 0 2 11 1 1 9 00 5 4 2 4
∼
1 1 1 9 02 4 0 2 10 5 4 2 4
∼
1 1 1 9 00 2 −2 −16 10 5 4 2 4
∼
1 1 1 9 00 1 −1 −8 1
2
0 5 4 2 4
∼
1 1 1 9 00 1 −1 −8 1
2
0 0 9 42 3
2
11

Por tanto, sı existe una matriz X tal que DX = E, pues ambos sistemas son compatibles. Como ambossistemas son determinados, sabemos que existe una unica matriz X que satisface esta ecuacion matricial. Paradeterminarla, llevamos ambos sistemas a su forma escalonada reducida:
∼
1 1 0 13
3− 1
6
0 1 0 − 10
3
2
3
0 0 1 42
9
1
6
∼
1 0 0 23
3− 5
6
0 1 0 − 10
3
2
3
0 0 1 42
9
1
6
Luego,
X =
23
3− 5
6
− 10
3
2
3
42
9
1
6
Nota : La multiplicacion de dos matricesA y B tiene tres formas de calcularse (y considerarse) segun las necesidadesde cada problema:
(i) Multiplicar la matriz A por cada columna de B, obteniendo las columnas de AB.
(ii) Hacer el producto punto de la fila i de A por la columna j de B, obteniendo el elemento (i, j) de AB.
(iii) Multiplicar la fila i de A por la matriz B, obteniendo la fila i de la matriz AB. Pero esto no quedara formalizadohasta que revisemos el concepto de matrices transpuestas.
Definicion: Sea n ∈ N. La matriz In de n× n se conoce como la matriz identidad de orden n. Los elementosde In son iguales a 1 en la diagonal principal de la matriz (los elementos de las posiciones (i, i)) y son iguales a 0en el resto de la matriz. Es decir, la matriz In tiene como columnas a los vectores canonicos de Rn:
In =[e1 e2 · · · en
].
Ejemplos: I1 = (1), I2 =
(1 00 1
), I3 =
1 0 00 1 00 0 1
Propiedades de la multiplicacion de matrices
Asuma en cada caso que todas las matrices presentes pueden ser operadas entre sı.
1. A(BC) = (AB)C.
2. A(B + C) = AB +AC, (A+B)C = AC +BC.
3. α(AB) = (αA)B = A(αB), donde α ∈ R.
4. OA = AO = O.
5. AIn = A, ImA = A, donde A es de m× n.
Advertencias sobre la multiplicacion de matrices
Las matrices NO son numeros (¡obvio!). Por tanto, la multiplicacion de matrices NO cumple propiedades basicasde los numeros reales.
1. En general, AB 6= BA. La multiplicacion de matrices NO es conmutativa.
2. En las matrices NO hay leyes de cancelacion. Es decir, la igualdad AB = AC NO implica que B = C. Deigual manera, la igualdad AB = CB NO implica A = C.
3. En la multiplicacion de matrices hay divisores del cero. Es decir, la igualdad AB = O NO implica que A = O
o B = O.
12

2.4. La matriz transpuesta
Definicion: Sea A una matriz de m×n. Se define la matriz transpuesta de A, que anotamos AT , como aquellade n×m que se obtiene de intercambiar las filas y las columnas de A.
Ejemplos:
Si A =
(1 2 34 5 6
), entonces AT =
1 42 53 6
.
Comenzaremos a considerar los vectores de Rn como matrices de n×1. Entonces, podremos tener tambien “vectores
transpuestos”. Ası, si −→v =
1469
, entonces −→v T =
(1 4 6 9
).
Hasta ahora, tambien hemos anotado el vector −→v hacia el lado, separando sus elementos por comas: −→v = (1, 4, 6, 9).Pero esta es una notacion para ahorrar espacio al escribir. Ası,
−→v =
1469
= (1, 4, 6, 9) y −→v T =
(1 4 6 9
)
Nota 1: Si A es la matriz canonica de una tl T : Rn −→ Rm, entonces AT es la matriz canonica de T ∗ : Rm −→ Rn
que cumple la siguiente propiedad:
∀x ∈ Rn ∀y ∈ R
m T (x) · y = x · T ∗(y),
donde el primer producto punto se realiza entre vectores de Rm y el segundo producto punto se realiza entre vectoresen R
n (ambos dan el mismo numero real).
Nota 2: Observemos que el producto punto de dos vectores de Rn equivale a la multplicaciom de primer vectortranspuesto por el segundo vector. Ası, si −→u = (1, 2, 5, 7, 9) y −→v = (1,−3, 2, 2, 1), entonces
[1 2 5 7 9
]
1−3221
= (1 · 1 + 2 · (−3) + 5 · 2 + 7 · 2 + 9 · 1)
Propiedades de la transposicion
Consideramos matrices que puedan ser operadas en cada caso.
1. (AT )T = A.
2. (A+B)T = AT +BT .
3. (αA)T = αAT , donde α ∈ R.
4. (AB)T = BTAT
13

2.5. La notacion A = (aij)
A continuacion estudiaremos una nueva notacion abreviada que nos permitira movernos con mayor generalidaddentro de una matriz.
Si tenemos una matriz A de m× n, ya la hemos escrito como
A =
a11 a12 a13 · · · a1na21 a22 a23 · · · a2na31 a32 a33 · · · a3n...
......
. . ....
am1 am2 am3 · · · amn
Abreviaremos aun mas esta notacion y comenzaremos a anotar
A =(aij
)
m×n,
donde i = 1, 2, 3, . . . ,m y j = 1, 2, 3, . . . , n.Ası, el elemento aij estara en la posicion (i, j), es decir, aij esta en la fila i-esima y en la columna j-esima de A.De esta manera, por ejemplo, la matriz identidad de orden 5 se anota
I5 =(δij
)
5×5
donde δij =
{1 si i = j
0 si i 6= j.
Otro ejemplo, si consideramos la matriz B = (bij)7×6, donde
bij =
i si i < j
2i+ j si i > j
3 si i = j
Tendremos que
B =
3 1 1 1 1 15 3 2 2 2 27 8 3 3 3 39 10 11 3 4 411 12 13 14 3 513 14 15 16 17 315 16 17 18 19 20
donde hemos marcado en azul todos los elementos bij para los que se cumple que i < j, en verde todos los elementosen que i > j y en rojo los elementos de la diagonal principal, es decir, aquellos en que i = j.
Queremos establecer formulas para las distintas operaciones matriciales, usando esta notacion.
Suma de matrices
Si A = (aij)m×n y B = (bij)m×n, entonces
A+B =(aij + bij
)
m×n.
Coincidiendo con nuestra apreciacion de que la suma de matrices se hace componente a componente.
Ponderacion escalar de matrices
Si A = (aij)m×n y α ∈ R, entonces
αA =(αaij
)
m×n.
14

Nuevamente, corfirmamos con esta formula que la ponderacion escalar se hace componente a componente.
Multiplicacion de matrices
Si A = (aij)m×n y B = (bij)n×p, entonces
AB = (cij)m×p,
donde cij =
n∑
k=1
aikbkj .
Esta definicion es un poco mas compleja, pero obedece a nuestra observacion de que el elemento del productoque esta en la posicion (i, j) (en este caso, cij) es el producto punto de la fila i-esima de A (en este caso, es el vector(ai1, ai2, . . . , ain)) por la columna j-esima de B (en este caso, es el vector (b1j , b2j , . . . , bnj)). De donde se obtienela suma de n terminos.
Transposicion de matrices
Si A = (aij)m×n, entoncesAT = (aij)n×m,
donde aij = aji.
Lo que obedece al fenomeno de intercambiar filas por columnas al transponer.
Veamos a traves de un par de ejercicios resueltos, como podemos utilizar esta notacion. Es recomendable quetrate de resolver ambos ejercicios por un metodo alternativo.
Ejercicios:
1. Considere las matrices A =(aij
)
m×ny B =
(bij
)
n×p.
Demuestre que(AB)T = BTAT.
Solucion: El elemento cij de la matriz C = AB = (cij)m×p es
cij =
n∑
k=1
aik · bkj .
Luego, el elemento que esta en la fila i y en la columna j de la matriz CT = (AB)T = (zij)p×m es zij = cji(es decir, en la definicion de cij los papeles de i y de j se deben intercambiar):
zij =
n∑
k=1
ajk · bki.
Ahora consideramos la matriz D = BTp×nA
Tn×m = (dij)m×p. El elemento dij de esta matriz es:
dij =
n∑
k=1
bik akj =
n∑
k=1
bki · ajk =
n∑
k=1
ajk · bki = cji = zij
Ası, los elementos correspondientes de las matrices CT y D son iguales, es decir, CT = D, por tanto,
(AB)T = BTAT .
15

2. Sean p1,p2, . . . ,pn y q1,q2, . . . ,qn numeros reales fijos (2n numeros). Se define la matriz
C =(cij
)
n×n
donde cij = pi · qj para todo i ∈ {1,2, . . . ,n} y todo j ∈ {1,2, . . . ,n}.
Demuestre que existe una constante real α tal que
C2 = αC.
Solucion: Considerando la matriz C = (cij)n×n = (pi · qj)n×n, calculamos C2 = C · C = (zij), donde
zij =
n∑
k=1
cik · ckj =
n∑
k=1
(pi · qk) · (pk · qj) = pi · qj
n∑
k=1
pk · qk = cij
(n∑
k=1
pk · qk
)
Es decir, si llamamos α a la constante real
n∑
k=1
pk · qk (que es fija pues los numeros p1, . . . , pn y q1, . . . , qn son
numeros fijos), entonces tendremos quezij = αcij
lo que significa queC2 = (zij)n×n = (α cij)n×n = α(cij)n×n = α C.
3. Transformaciones lineales inyectivas y sobreyectivas.
Comenzaremos definiendo dos conjuntos asociados a toda tl.
Definicion: Sea T : Rn −→ Rm una tl. Se definen los conjuntos:
(i) El Nucleo de T o Kernel de T como el subconjunto de Rn dado por
Ker(T ) = {−→x ∈ Rn : T (−→x ) =
−→0 }
(ii) La imagen de T como el subconjunto de Rm definido por
Im(T ) = Rec(T ) = {−→y ∈ Rm : ∃−→x ∈ R
n T (−→x ) = −→y }
Si conocemos la matriz canonica de la tl T , tendremos descripciones muy precisas de los conjuntos Ker(T ) eIm(T ).
Teorema. Sea T : Rn −→ Rm una tl con matriz canonica A. Entonces:
(i) Ker(T ) coincide con las soluciones del sistema homogeneo Ax = 0.
(ii) Im(T ) es el conjunto generado por las columnas de A.
Demostracion. Si S0 es el conjunto de todas las soluciones de Ax = 0, entonces como T (x) = Ax para todox ∈ Rn, tendremos que
Ker(T ) = {x ∈ Rn : T (x) = 0} = {x ∈ R
n : Ax = 0} = S0
Lo que prueba (i). Ahora, para probar (ii), recordemos que un sistema Ax = b es compatible si y solo si el vectorde resultados b es combinacion lineal de las columnas de A.
16

Ası,
y ∈ Im(T ) ⇐⇒ ∃x0 ∈ Rn T (x0) = y
⇐⇒ ∃x0 ∈ Rn Ax0 = y
⇐⇒ El sistema Ax = y es compatible
⇐⇒ y es combinacion lineal de las columnas de A
Por tanto, Im(T ) es el conjunto generado por las columnas de A.
Ejemplo: Sea T : R4 −→ R3 la tl definida por
T (x, y, z, t) = (4x− 2y + t, x+ y − z + 2t, x− y + z + t).
Determinemos un conjunto de vectores li que genere Ker(T ) y otro conjunto de vectores li que genere Im(T ).Para determinar Ker(T ) e Im(T ), obtengamos la matriz canonica de T :
A =[T (e1) T (e2) T (e3) T (e4)
]=
4 −2 0 11 1 −1 21 −1 1 1
Para determinar Ker(T ), debemos resolver Ax = 0, es decir, pivoteamos A.Ademas, ya sabemos que
Im(T ) =⟨{
(4, 1, 1), (−2, 1,−1), (0,−1, 2), (1, 2, 1)}⟩
Pero las cuatro columnas de A son vectores de R3 y, por tanto, no pueden ser li (recordemos que en Rn los conjuntoscon vectores li pueden tener a lo mas n elementos). Para saber que columnas de A son li, debemos pivotear A.Entonces:
4 −2 0 11 1 −1 21 −1 1 1
F1 ↔ F3 ∼
1 −1 1 11 1 −1 24 −2 0 1
F2 − F1
F3 − 4F1
∼
1 −1 1 10 2 −2 10 2 −4 −3
F3 − F2
∼
1 −1 1 10 2 −2 10 0 −2 −4
Ası, tenemos que las primeras 3 columnas de A son li, mientras que la cuarta columna depende linealmente de lasdemas (debido a que queda sin pivote en la forma escalonada).Luego, {(4, 1, 1), (−2, 1,−1), (0,−1, 1)} es un conjunto de vectores li que genera Im(T ).Ademas, con la escalinada podemos resolver el sistema Ax = 0, que nos queda
x− y + 2z + t = 02y − 3z + t = 0
−z − 4t = 0=⇒ z = −4t =⇒ 2y + 12t+ t = 0 =⇒ y = −
13
2t
Entonces, x+13
2t− 8t+ 8 = 0 =⇒ x =
t
2
Ası, (x, y, z, t) =
(t
2,−
13
2t,−4t, t
)= t
(1
2,−
13
2,−4, 1
)y
Ker(T ) =
⟨{(1
2,−
13
2,−4,−1
)}⟩
Claramente,
{(1
2,−
13
2,−4,−1
)}es un conjunto de vectores li (un unico vector distinto de cero) que genera
Ker(T ).
17
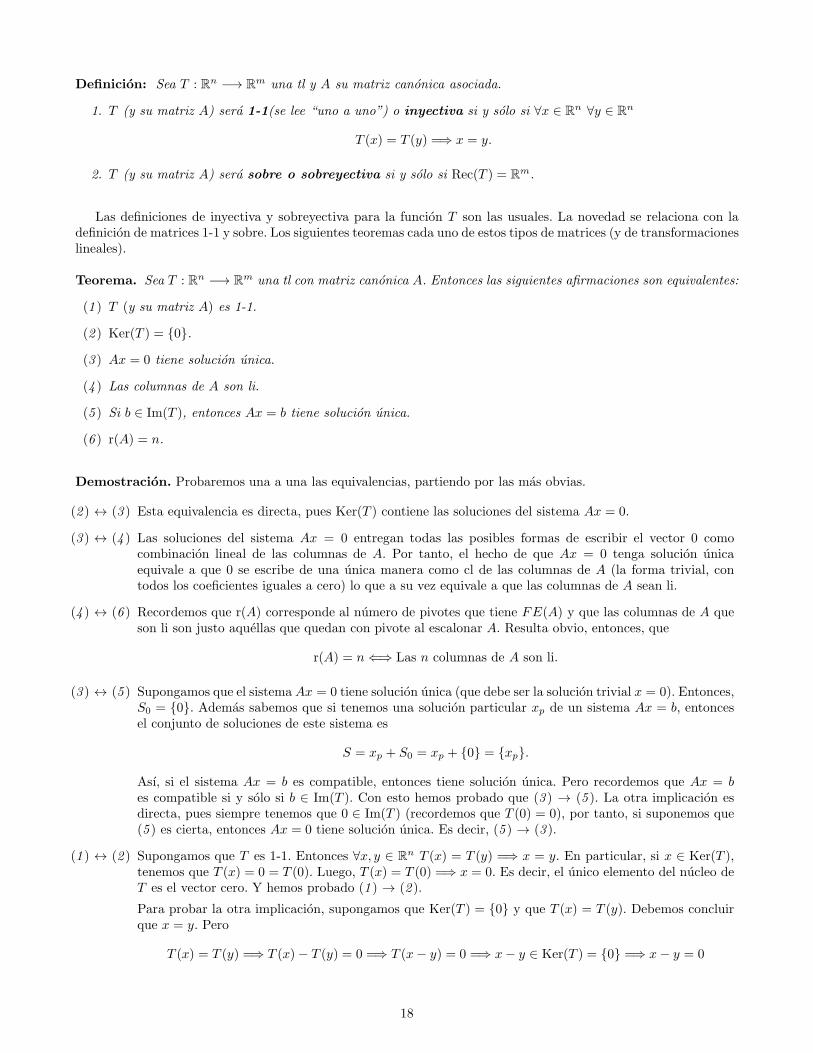
Definicion: Sea T : Rn −→ Rm una tl y A su matriz canonica asociada.
1. T (y su matriz A) sera 1-1(se lee “uno a uno”) o inyectiva si y solo si ∀x ∈ Rn ∀y ∈ R
n
T (x) = T (y) =⇒ x = y.
2. T (y su matriz A) sera sobre o sobreyectiva si y solo si Rec(T ) = Rm.
Las definiciones de inyectiva y sobreyectiva para la funcion T son las usuales. La novedad se relaciona con ladefinicion de matrices 1-1 y sobre. Los siguientes teoremas cada uno de estos tipos de matrices (y de transformacioneslineales).
Teorema. Sea T : Rn −→ Rm una tl con matriz canonica A. Entonces las siguientes afirmaciones son equivalentes:
(1 ) T (y su matriz A) es 1-1.
(2 ) Ker(T ) = {0}.
(3 ) Ax = 0 tiene solucion unica.
(4 ) Las columnas de A son li.
(5 ) Si b ∈ Im(T ), entonces Ax = b tiene solucion unica.
(6 ) r(A) = n.
Demostracion. Probaremos una a una las equivalencias, partiendo por las mas obvias.
(2 ) ↔ (3 ) Esta equivalencia es directa, pues Ker(T ) contiene las soluciones del sistema Ax = 0.
(3 ) ↔ (4 ) Las soluciones del sistema Ax = 0 entregan todas las posibles formas de escribir el vector 0 comocombinacion lineal de las columnas de A. Por tanto, el hecho de que Ax = 0 tenga solucion unicaequivale a que 0 se escribe de una unica manera como cl de las columnas de A (la forma trivial, contodos los coeficientes iguales a cero) lo que a su vez equivale a que las columnas de A sean li.
(4 ) ↔ (6 ) Recordemos que r(A) corresponde al numero de pivotes que tiene FE(A) y que las columnas de A queson li son justo aquellas que quedan con pivote al escalonar A. Resulta obvio, entonces, que
r(A) = n ⇐⇒ Las n columnas de A son li.
(3 ) ↔ (5 ) Supongamos que el sistema Ax = 0 tiene solucion unica (que debe ser la solucion trivial x = 0). Entonces,S0 = {0}. Ademas sabemos que si tenemos una solucion particular xp de un sistema Ax = b, entoncesel conjunto de soluciones de este sistema es
S = xp + S0 = xp + {0} = {xp}.
Ası, si el sistema Ax = b es compatible, entonces tiene solucion unica. Pero recordemos que Ax = b
es compatible si y solo si b ∈ Im(T ). Con esto hemos probado que (3 ) → (5 ). La otra implicacion esdirecta, pues siempre tenemos que 0 ∈ Im(T ) (recordemos que T (0) = 0), por tanto, si suponemos que(5 ) es cierta, entonces Ax = 0 tiene solucion unica. Es decir, (5 ) → (3 ).
(1 ) ↔ (2 ) Supongamos que T es 1-1. Entonces ∀x, y ∈ Rn T (x) = T (y) =⇒ x = y. En particular, si x ∈ Ker(T ),tenemos que T (x) = 0 = T (0). Luego, T (x) = T (0) =⇒ x = 0. Es decir, el unico elemento del nucleo deT es el vector cero. Y hemos probado (1 ) → (2 ).
Para probar la otra implicacion, supongamos que Ker(T ) = {0} y que T (x) = T (y). Debemos concluirque x = y. Pero
T (x) = T (y) =⇒ T (x)− T (y) = 0 =⇒ T (x− y) = 0 =⇒ x− y ∈ Ker(T ) = {0} =⇒ x− y = 0
18
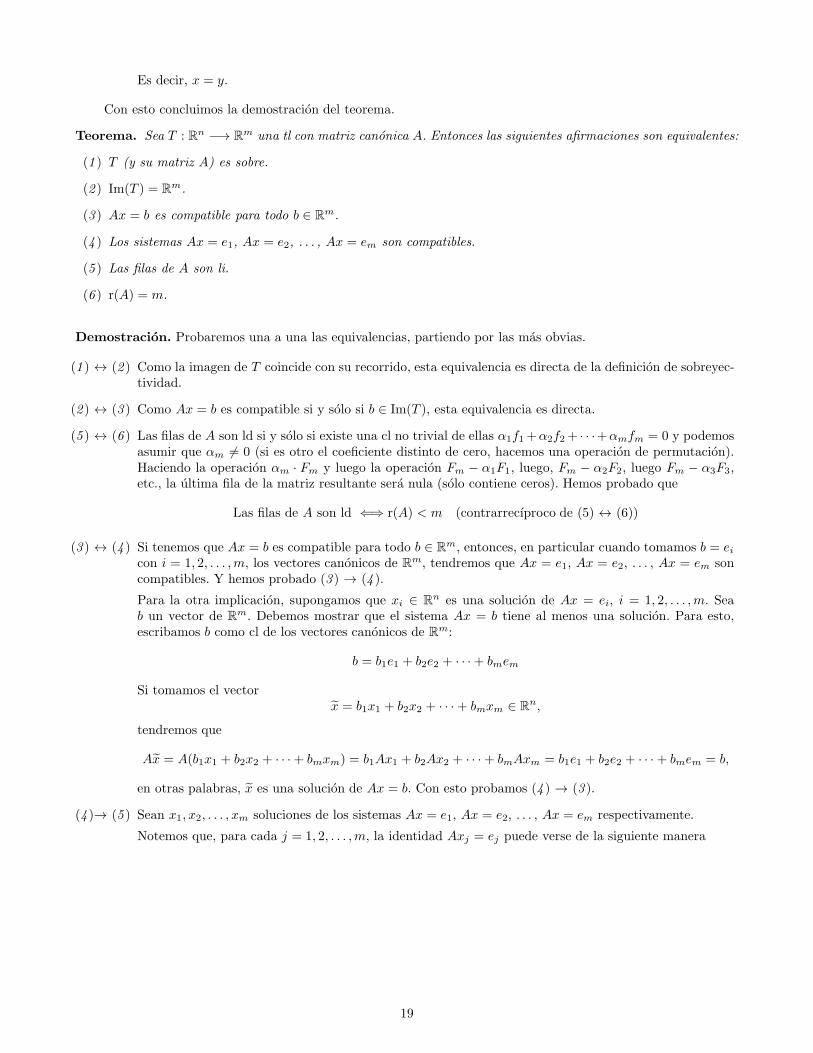
Es decir, x = y.
Con esto concluimos la demostracion del teorema.
Teorema. Sea T : Rn −→ Rm una tl con matriz canonica A. Entonces las siguientes afirmaciones son equivalentes:
(1 ) T (y su matriz A) es sobre.
(2 ) Im(T ) = Rm.
(3 ) Ax = b es compatible para todo b ∈ Rm.
(4 ) Los sistemas Ax = e1, Ax = e2, . . . , Ax = em son compatibles.
(5 ) Las filas de A son li.
(6 ) r(A) = m.
Demostracion. Probaremos una a una las equivalencias, partiendo por las mas obvias.
(1 ) ↔ (2 ) Como la imagen de T coincide con su recorrido, esta equivalencia es directa de la definicion de sobreyec-tividad.
(2 ) ↔ (3 ) Como Ax = b es compatible si y solo si b ∈ Im(T ), esta equivalencia es directa.
(5 ) ↔ (6 ) Las filas de A son ld si y solo si existe una cl no trivial de ellas α1f1+α2f2+ · · ·+αmfm = 0 y podemosasumir que αm 6= 0 (si es otro el coeficiente distinto de cero, hacemos una operacion de permutacion).Haciendo la operacion αm · Fm y luego la operacion Fm − α1F1, luego, Fm − α2F2, luego Fm − α3F3,etc., la ultima fila de la matriz resultante sera nula (solo contiene ceros). Hemos probado que
Las filas de A son ld ⇐⇒ r(A) < m (contrarrecıproco de (5) ↔ (6))
(3 ) ↔ (4 ) Si tenemos que Ax = b es compatible para todo b ∈ Rm, entonces, en particular cuando tomamos b = eicon i = 1, 2, . . . ,m, los vectores canonicos de Rm, tendremos que Ax = e1, Ax = e2, . . . , Ax = em soncompatibles. Y hemos probado (3 ) → (4 ).
Para la otra implicacion, supongamos que xi ∈ Rn es una solucion de Ax = ei, i = 1, 2, . . . ,m. Seab un vector de Rm. Debemos mostrar que el sistema Ax = b tiene al menos una solucion. Para esto,escribamos b como cl de los vectores canonicos de Rm:
b = b1e1 + b2e2 + · · ·+ bmem
Si tomamos el vectorx = b1x1 + b2x2 + · · ·+ bmxm ∈ R
n,
tendremos que
Ax = A(b1x1 + b2x2 + · · ·+ bmxm) = b1Ax1 + b2Ax2 + · · ·+ bmAxm = b1e1 + b2e2 + · · ·+ bmem = b,
en otras palabras, x es una solucion de Ax = b. Con esto probamos (4 ) → (3 ).
(4 )→ (5 ) Sean x1, x2, . . . , xm soluciones de los sistemas Ax = e1, Ax = e2, . . . , Ax = em respectivamente.
Notemos que, para cada j = 1, 2, . . . ,m, la identidad Axj = ej puede verse de la siguiente manera
19

Axj = ej ⇐⇒
f1f2...fj...fm
xj =
00...1...0
⇐⇒
f1 · xj
f2 · xj
...fj · xj
...fm · xj
=
00...1...0
Ası, tenemos que
fi · xj = δij =
{1 si i = j
0 si i 6= j
Queremos demostrar que las filas de A son li. Para esto, consideremos el vector cero escrito como cl deellas:
α1f1 + α2f2 + · · ·+ αmfm = 0
Hacemos el producto punto de cada termino por xj (para j = 1, 2, . . . ,m):
(α1f1 + α2f2 + · · ·+ αmfm) · xj = 0 · xj
=⇒ α1f1 · xj︸ ︷︷ ︸0
+ · · ·+ αjfj · xj︸ ︷︷ ︸1
+ · · ·+ αmfm · xj︸ ︷︷ ︸0
= 0
=⇒ αj = 0
Con esto hemos probado que la unica forma de escribir el vector cero como cl de las filas de A es latrivial (con todos los coeficientes nulos). Es decir, las filas de A son li.
(6 ) → (3 ) Supongamos que r(A) = m. Queremos probar que todo sistema Ax = b es compatible. Pero esto esdirecto, pues
m = r(A) ≤ r(A|b) ≤ numero de filas de A = m
Por tanto, r(A|b) = m = r(A) y el sistema Ax = b es compatible para cualquier vector b ∈ Rm.
Con esto concluimos la demostracion del teorema.
4. Matrices inversas
Definicion: Sea A una matriz de m× n. Diremos que:
1. A tiene inversa por la derecha si existe una matriz X de n×m tal que
AX = Im.
2. A tiene inversa por la izquierda si existe una matriz Y de n×m tal que
Y A = In.
Nota 1: Toda matriz X que cumpla AX = I se llama inversa por la derecha de A. Toda matriz Y que cumplaY A = I se llama inversa por la izquierda de A. Las inversas por derecha o por izquierda de A, si existen, no sonunicas.
Nota 2: En terminos de transformaciones lineales, tambien podemos hablar de inversas por la derecha y por laizquierda. Si T : Rn −→ Rm es una tl con matriz canonica A, entonces:
Cuando A tiene una inversa por la derecha X , existe una tl S : Rm −→ Rn (la tl asociada a X) tal queT ◦ S : Rm −→ Rm es la funcion identidad en Rm, es decir, ∀x ∈ Rm
(T ◦ S)(x) = x.
20

Cuando A tiene una inversa por la izquierda Y , existe una tl R : Rm −→ Rn (la tl asociada a Y ) tal queR ◦ T : Rn −→ Rn es la funcion identidad en Rn, es decir, ∀y ∈ Rn
(R ◦ T )(y) = y.
A continuacion caracterizaremos las matrices que tienen inversas por derecha y aquellas que tienen inversas porizquierda.
Teorema. Sea A una matriz de m× n. Entonces
A tiene inversa por la derecha ⇐⇒ A es sobre
Demostracion.
A tiene inversa por la derecha ⇐⇒ Existe una matriz X tal que AX = Im
⇐⇒ Existen vectores x1, x2, . . . , xm ∈ Rn tales que
A[x1 x2 · · · xm
]=[e1 e2 · · · em
]
⇐⇒ Existen vectores x1, x2, . . . , xm ∈ Rn tales que[
Ax1 Ax2 · · · Axm
]=[e1 e2 · · · em
]
⇐⇒ Los sistemas Ax = e1, . . . , Ax = em son compatibles
⇐⇒ A es sobre.
Teorema. Sea A una matriz de m× n. Entonces
A tiene inversa por la izquierda ⇐⇒ A es 1− 1
Demostracion.
A tiene inversa por la izquierda ⇐⇒ Existe una matriz Y tal que Y A = In
⇐⇒ Existe una matriz Y tal que (Y A)T = (In)T
⇐⇒ Existe una matriz Y tal que ATY T = In
⇐⇒ La matriz AT tiene inversa por la derecha
⇐⇒ AT es sobre.
⇐⇒ Las filas de AT son li
⇐⇒ Las columnas de A son li
⇐⇒ A es 1-1
Con todos estos resultados, sabemos que calculando el rango gaussiano de la matriz A podemos determinar deforma inmediata si A tiene inversa por derecha o por izquierda: si todas las filas de FE(A) tienen pivote, entoncesA tiene inversa por la derecha y si todas las columnas de FE(A) tienen pivote, entonces A tiene inversa por laizquierda. Esto nos permite concluir lo siguiente:
Corolario. Sea A una matriz de m× n. Entonces:
Si A tiene inversa por la derecha, entonces m ≤ n.
Si A tiene inversa por la izquierda, entonces n ≤ m.
Si A tiene inversa por la derecha y por la izquierda, entonces m = n.
Demostracion. Las primeras dos afirmaciones se concluyen facilmente, pues en Rp los conjuntos de vectores litienen, a lo mas, p elementos. La ultima afirmacion es una consecuencia de las otras dos.
21

Nota de Alerta: No estamos diciendo que toda matriz con mas columnas que filas tiene inversa por la derecha.Pues esto es falso. Por ejemplo, la matriz
1 −2 0 0 50 −3 1 0 10 0 0 0 0
cumple que m ≤ n (pues m = 3 y n = 5), pero su rango no es igual a m, por tanto, la matriz no tiene inversa porla derecha.
Sı podemos concluir del corolario, por contrarrecıproco, que las matrices “anchas” (con mas columnas que filas)nunca tienen inversas por la izquierda y que las matrices “largas” (con mas filas que columnas) nunca tienen inversaspor la derecha. El estudio de las matrices cuadradas y sus inversas se hara en la siguiente seccion.
4.1. Calculo de inversas
4.1.1. Inversas por la derecha
Determinemos si la matriz A =
1 2 3 41 1 2 11 0 0 1
tiene inversa por la derecha (sabemos que como tiene mas
columnas que filas, no tiene inversa por la izquierda), pivoteandola:
A =
1 2 3 41 1 2 11 0 0 1
∼
1 2 3 40 −1 −1 −30 −2 −3 −3
∼
1 2 3 40 −1 −1 −30 0 −1 3
=⇒ r(A) = 3 = m
A tiene inversa por la derecha.Para determinar una matriz X de 4× 3 tal que AX = I3, describamosla por columnas:
X =[x1 x2 x3
]
Entonces:
AX = I3 ⇐⇒ A[x1 x2 x3
]=[e1 e2 e3
]⇐⇒
[Ax1 Ax2 Ax3
]=[e1 e2 e3
]
y para encontrar las columnas de X debemos resolver m = 3 sistemas de ecuaciones: Ax = e1, Ax = e2 y Ax = e3.Lo haremos simultaneamente, pues comparten la matriz de coeficientes, es decir, escalonamos la matriz ampliada(A|e1|e2|e3) = (A|I3):
1 2 3 4 1 0 01 1 2 1 0 1 01 0 0 1 0 0 1
∼
1 2 3 4 1 0 00 −1 −1 −3 −1 1 00 −2 −3 −3 −1 0 1
∼
1 2 3 4 1 0 00 −1 −1 −3 −1 1 00 0 −1 3 1 −2 1
∼
1 2 3 4 1 0 00 1 1 3 1 −1 00 0 1 −3 −1 2 −1
∼
1 2 0 13 4 −6 30 1 0 6 0 1 −10 0 1 −3 −1 2 −1
∼
1 0 0 1 4 −8 50 1 0 6 0 1 −10 0 1 −3 −1 2 −1
Entonces, cada uno de los sistemas tiene infinitas soluciones con una variable libre. Tenemos, entonces, infinitasmatrices X . Determinemos cada una de sus columnas:
x1 =
a1b1c1d1
=
4− d1−6d1
−1 + 3d1d1
=
40
−10
+ d1
−1−631
22

x2 =
a2b2c2d2
=
−8− d21− 6d22 + 3d2
d2
=
−8120
+ d2
−1−631
x3 =
a3b3c3d3
=
5− d3−1− 6d3−1 + 3d3
d3
=
5−1−10
+ d3
−1−631
Luego,
X =
4− d1 −8− d2 5− d3−6d1 1− 6d2 −1− 6d3
−1 + 3d1 2 + 3d2 −1 + 3d3d1 d2 d3
donde las constantes d1, d2 y d3 pueden tomar cualquier valor en R cada una.Ası,
X1 =
0 −7 3−24 7 −1311 −1 54 −1 2
X2 =
4 −8 50 1 −1−1 2 −10 0 0
X3 =
1 −10 4−18 −11 −198 8 23 2 1
son algunas inversas por derecha de A.
El metodo general para encontrar todas las inversas por la derecha de una matriz A de m × n con r(A) = m
consiste en resolver simultaneamente los m sistemas: Ax = e1, Ax = e2, . . . , Ax = em, es decir, se debe encontrarFER(A|Im).
4.1.2. Inversas por la izquierda
Determinemos si la matriz A =
1 22 31 1
tiene inversa por la izquierda:
A =
1 22 31 1
∼
1 20 −10 −1
∼
1 20 −10 0
=⇒ r(A) = 2 = n
A tiene inversa por la izquierda.Para determinar las inversas por la izquierda de A, buscamos una matriz Y de 2×3 tal que Y A = I2. Vamos a usar
el metodo visto para inversas por la derecha. Para esto, transpondremos la ecuacion, obteniendo que (Y A)T = (I2)T
y, por tanto, debemos resolverATY T = I2
Describimos Y T por sus columnas:
Y T =[y1 y2
]
y resolvemos los sistemas AT y = e1 y AT y = e2, para lo cual debemos escalonar la matriz ampliada (AT |I2):
(1 2 1 1 02 3 1 0 1
)∼
(1 2 1 1 00 −1 −1 −2 1
)∼
(1 2 1 1 00 1 1 2 −1
)∼
(1 0 −1 −3 20 1 1 2 −1
)
Luego,
y1 =
a
b
c
=
−3 + c
2− c
c
=
−320
+ c
1
−11
y2 =
a′
b′
c′
=
2 + c′
−1− c′
c′
=
2−10
+ c′
1−11
23

Por tanto,
Y T =
−3 + c 2 + c′
2− c −1− c′
c c′
=⇒ Y =
(−3 + c 2− c c
2 + c′ −1− c′ c′
)
En general, el metodo para determinar las inversas por la izquierda de una matriz A de m × n con r(A) = n
consiste en calcular las inversas por la derecha de AT y luego, transponerlas. En este caso, se debe pivotear la matrizampliada (AT |In).
5. Inversas de matrices cuadradas
Ya sabemos que si una matriz A tiene inversas por la derecha y por la izquierda, entonces es una matriz cuadrada(mismo numero de filas que de columnas). Pero no todas las matrices cuadradas tienen inversas. Por ejemplo, lamatriz
1 1 1 1 12 2 2 2 23 3 3 3 34 4 4 4 45 5 5 5 5
no tiene inversa por la derecha, pues sus filas son ld y como las tres columnas son iguales (tambien son ld), tampocotendra inversa por la izquierda.
Con todo lo que ya sabemos de la existencia de matrices inversas para matrices de cualquier tipo (no necesari-amente cuadradas), podemos probar facilmente las siguientes propiedades de las matrices cuadradas. Sea A unamatriz de n× n. Entonces:
1. A tiene inversa por la derecha si y solo si A tiene inversa por la izquierda.
A tiene inversa por la derecha ⇐⇒ r(A) = n = numero de filas
⇐⇒ r(A) = n = numero de columnas
⇐⇒ A tiene inversa por la izquierda
2. Si X es una inversa por la derecha de A y si Y es una inversa por la izquierda de A, entonces X = Y .
Sabemos que AX = In y que Y A = In y que la multiplicacion de matrices es asociativa, entonces:
Y = Y In = Y(AX
)=(Y A)X = InX = X
Por esta razon, comenzaremos a hablar de inversas de A (sin distinguir si son inversas por la derecha o porla izquierda). Ademas, tenemos que si AX = In, entonces tambien tenemos que XA = In.
3. Si A tiene inversa, entonces esta es unica.
Supongamos que existen dos matrices X1 y X2 tales que AX1 = In = X1A y AX2 = In = X2A. Entonces:
X1 = X1In = X1
(AX2
)=(X1A
)X2 = InX2 = X2.
Ası, de ahora en adelante hablaremos de “la” inversa de A.
Definicion: Sea A una matriz cuadrada de orden n (es decir, de n× n) con r(A) = n. Entonces la unica matrizinversa por la derecha de A se llama simplemente la inversa de A y se anota A−1. Entonces A−1 es la unicamatriz que cumple
AA−1 = A−1A = In
Las matrices cuadradas que tienen inversa se dicen invertibles.
24

Propiedades de las matrices invertibles
Supongamos que A y B son dos matrices de orden n.
1. Si A es invertible,(A−1
)−1
= A.
2. Si A es invertible y α 6= 0, entonces αA tambien es invertible y(αA)−1
= 1
αA−1.
3. Si A y B son invertibles, entonces AB tambien lo es y (AB)−1 = B−1A−1.
4. A es invertible si y solo si AT es invertible. Si ambas lo son, se tiene que (AT )−1 = (A−1)T .
Reuniremos en un teorema todas las formas de reconocer una matriz invertible. La demostracion no es necesaria,pues ya lo hemos probado todo para matrices inversas por la derecha o por la izquierda.
Teorema. Sea A una matriz cuadrada de orden n asociada a la tl T : Rn −→ Rn. Entonces las siguientesafirmaciones son equivalentes:
1. A es invertible.
2. A tiene inversa por la derecha.
3. A tiene inversa por la izquierda.
4. T es una biyeccion.
5. T es inyectiva.
6. T es sobreyectiva.
7. Las filas de A son li.
8. Las columnas de A son li.
9. El sistema Ax = 0 tiene solucion unica.
10. El sistema Ax = b tiene solucion unica para todo b ∈ Rn.
11. La forma escalonada reducida de A es In.
12. r(A) = n.
Nota : Si A es invertible y esta asociada a la transformacion lineal T : Rn −→ Rn, entonces, claramente, la matrizA−1 estara asociada a una tl S : Rn −→ Rn que cumple
∀ x ∈ Rn (S ◦ T )(x) = x = (T ◦ S)(x)
Es decir, S es la funcion inversa T−1.Con esto hemos probado que si T (x) = Ax y A es invertible, entonces T−1(x) = A−1x y tenemos tambien que
T−1 es una tl.
La ultima pregunta pertinente es:
¿Como se calcula la inversa de una matriz A cuadrada invertible?
Bueno, la respuesta es muy simple. Solo debe encontrarse su inversa por la derecha o por la izquierda con losmetodos usuales. En general, uno siempre prefiere encontrar la inversa por la derecha. De esta manera, debemosescalonar la matriz ampliada (A|In) y como A es invertible, tenemos que FER(A) = In. Ası, tendremos que llegandoa la escalona reducida da la ampliada habremos encontrado explıcitamente nuestra matriz inversa:
(A|In) ∼ ∼ ∼ · · · ∼ (In|A−1)
25

Ejemplo: Consideremos la transformacion lineal T : R4 −→ R4 definida por
T (x, y, z, t) =
α 2α 0 00 1 0 3α− 10 1 α− 1 2α− 1α 2α 0 α
x
y
z
t
donde α es un numero real. Queremos saber para que valores de α existe la tl T−1.
Si ponemos A =
α 2α 0 00 1 0 3α− 10 1 α− 1 2α− 1α 2α 0 α
, tenemos que T (x) = Ax, es decir, A es la matriz asociada a la
transformacion lineal.
Por teorema, T es biyeccion (es decir, existe T−1) si y solo si A es invertible. Pero,
A =
α 2α 0 00 1 0 3α− 10 1 α− 1 2α− 1α 2α 0 α
F4 − F1
∼
α 2α 0 00 1 0 3α− 10 1 α− 1 2α− 10 0 0 α
F3 − F2
∼
α 2α 0 00 1 0 3α− 10 0 α− 1 −α
0 0 0 α
Entonces, como A es invertible si y solo si r(A) = 4, necesitamos que todos los elementos de la diagonal principalde A sean pivotes (o sea, numeros distintos de cero). Para esto, requerimos que α 6= 0 y que α − 1 6= 0. EntoncesT−1 existe si y solo si α 6= 0 y α 6= 1.
Ahora, tomemos α = −1 y encontremos T−1(a, b, c, d). Para esto, basta calcular A−1, pues
T−1(a, b, c, d) = A−1
a
b
c
d
Reemplazando α = −1 en la matriz A, usamos la siguiente matriz amplada para encontrar A−1.
(A|I4) =
−1 −2 0 0 1 0 0 00 1 0 −4 0 1 0 00 1 −2 −3 0 0 1 0
−1 −2 0 −1 0 0 0 1
F4 − F1
∼
−1 −2 0 0 1 0 0 00 1 0 −4 0 1 0 00 1 −2 −3 0 0 1 00 0 0 −1 −1 0 0 1
F3 − F2
∼
−1 −2 0 0 1 0 0 00 1 0 −4 0 1 0 00 0 −2 1 0 −1 1 00 0 0 −1 −1 0 0 1
F2 − 4F4
F3 + F4
∼
−1 −2 0 0 1 0 0 00 1 0 0 4 1 0 −40 0 −2 0 −1 −1 1 10 0 0 −1 −1 0 0 1
F1 + 2F2
26

∼
−1 0 0 0 9 2 0 −80 1 0 0 4 1 0 −40 0 −2 0 −1 −1 1 10 0 0 −1 −1 0 0 1
F1 · (−1)
F3 · −1
2
F4 · (−1)
∼
1 0 0 0 −9 −2 0 80 1 0 0 4 1 0 −40 0 1 0 1
2
1
2− 1
2− 1
2
0 0 0 1 1 0 0 −1
= (I4|A
−1)
Entonces A−1 =
−9 −2 0 84 1 0 −41
2
1
2− 1
2− 1
2
1 0 0 −1
y
T−1(a, b, c, d) =
−9 −2 0 84 1 0 −41
2
1
2− 1
2− 1
2
1 0 0 −1
a
b
c
d
.
27

MAT1203 Algebra Lineal
Guıa N◦3 – Transformaciones lineales y matrices
1. Escriba cada matriz caracterizada a continuacion.
a) A = (aij)4×4, donde aij =i2 − j2
i.
b) B = (bij)2×5, donde bij =i− j
j + i.
c) C = (cij)3×7, donde cij =
[i
j
]si i ≥ j
[i
2
]+
[j
2
]si i < j
y [x] es la parte entera de x (es decir, es el mayor entero menor o igual a x).
d) D = (dij)n×n, donde dij =
−1 si i− j + 3 = 01 si i = j
0 en cualquier otro caso.
2. Encuentre una descripcion del termino general de la matriz
B =
1 2 3 · · · n
3 4 5 · · · n+ 25 6 7 · · · n+ 4...
......
. . ....
2n− 1 2n 2n+ 1 · · · 3n− 2
n×n
3. Decida si cada una de las siguientes funciones es una transformacion lineal (t.l.)
a) Sean a, b ∈ Rn fijos y T : Rn −→ R2 dada por T (x) = (x · a, x · b).
b) T : Rn −→ R esta definida por T (x) = ‖x‖.
c) Sean a ∈ Rm fijo, A una matriz de n× n y T : Rn −→ Rm dada por T (x) = xTAx a.
d) T : R4 −→ R3 esta definida por T (a, b, c, d) = (a+ b, c+ d, a− 2b+ c− 1).
e) T : R3 −→ R3 esta definida por T (x) = x× a, donde a es un vector fijo de R3.
4. Sea T : Rm −→ Rn la t.l. definida por T (x) = xTA, donde A es una matriz de orden m × n. Determine lamatriz asociada a T .
5. Sea T : R4 −→ R3 una t.l. tal que T (e1) = (1, 2, 3), T (e2) = (0, 1, 2), T (e3) = (1, 3, 5) y T (e4) = (0, 0, 0),donde {e1, e2, e3, e4} son los vectores canonicos de R4. Determine T (x, y, z, t) y la matriz A asociada a T .
6. Sea T : R2 −→ R2 una t.l. tal que T (1, 0) = (3, 6) y T (0, 1) = (− 1
6, 1).
a) Mostrar que la imagen bajo T de la recta 3x+ 2y = 0 es la recta 18x− 13y = 0.
b) Existe una recta L que pasa por el origen y que queda fija bajo T (es decir, T (L) = L, aunque nonecesariamente T (u) = u, para todo u ∈ L). ¿Cual es la recta?
7. ¿Existe una t. l. T : R3 −→ R3 tal que: T (1, 2, 0) = (1, 2, 3), T (2, 1,−1) = (1, 0,−1), T (7, 8,−2) = (0,−3, 2)?
8. Sea A una matriz de 2× 2 tal que A
(31
)=
(12
)y A
(−10
)=
(11
):
a) Determine la matriz A y la t.l. T asociada a A.
b) Describa la imagen bajo T del triangulo cuyos vertices son (−3, 0), (26, 6) y (−12,−3).
28

9. Determine la relacion que deben tener los numeros reales p y q para que las matrices A =
(p q
q 2p
)y
B =
(1 11 2
)conmuten.
10. Determine todas las matrices A de orden 2× 2 que satisfacen la ecuacion matricial A2 + I2 = O.
11. Suponga que la matriz M de 3×3 es tal que sus elementos por filas, por columnas y por diagonales suman 15.
Sean u =
111
y B =
1 1 11 1 11 1 1
. Determine los siguientes productos: Mu, uTM , BM −MB y1
45uTMu.
12. Determine una matriz A 6= O, tal que A2 = O y pruebe que si BTB = O, entonces B = O.
13. Sea A = (aij)n×n. Se define la traza de A por
tr(A) = a11 + a22 + · · ·+ ann =n∑
i=1
aii.
Si A y B son dos matrices de orden n× n, demuestre que:
a) tr(A+B) = tr(A) + tr(B).
b) tr(λA) = λ tr(A).
c) tr(AB) = tr(BA).
d) Si A 6= O, tr(AAt) > 0.
14. Sea A = (aij)n×n. Se dice que A es una matriz de Markov si:
i) 0 ≤ aij ≤ 1, ii)
n∑
j=1
aij = 1 para i = 1, 2, . . . , n.
Demuestre que el producto de dos matrices de Markov es una matriz de Markov.
15. Sean k y d dos numeros reales y sea B la matriz de n × n tal que todos sus elementos son 1 excepto los desu diagonal principal, que son 0. Encuentre los valores que deben tomar k y d para que AAT = In, dondeA = kIn + dB.
16. Calcule An con n ∈ N, para:
a) A =
(1 11 1
).
b) A =
α 0 α
0 α 0α 0 α
(α ∈ R).
c) A =
(α 10 α
)(α ∈ R).
d) A =
α α α
0 α α
0 0 α
(α ∈ R).
17. Calcule A100 si A =
1 0 01 0 10 1 0
.
18. Sea A = (aij)n×n, donde aij =
{1 si i+ 1 = j
0 si i+ 1 6= j. Pruebe que An = O y An−1 6= O.
19. Una matriz A sera simetrica si AT = A y sera antisimetrica si AT = −A. Demuestre:
a) Si B = (bij)n×n es una matriz antisimetrica, entonces bii = 0 para todo i.
b) Si A es una matriz antisimetrica, entonces A2 es simetrica.
c) Dada una matriz B cuadrada de orden n, entonces 1
2(B+BT ) es simetrica y 1
2(B−BT ) es antisimetrica.
d) Si A y B son matrices simetricas, entonces AB sera una matriz simetrica si y solo si AB = BA.
e) Si A y B son matrices antisimetricas tales que AB = BA, entonces AB es una matriz simetrica.
29

20. Sean A =
1 1 1 1 10 1 1 1 10 0 1 1 10 0 0 1 10 0 0 0 1
y B =
2 1 0 0 01 2 1 0 00 1 2 1 00 0 1 2 10 0 0 1 2
. Determine una matriz X tal que AX = B.
21. Para cada una de las siguientes matrices, determine si tiene inversa por la derecha y/o inversa por la izquierda.
a) A =
1 0 1 1 1−1 1 −1 1 −31 1 1 3 0−1 2 −1 3 −4
b) A =
1 1 1 1 · · · 11 2 2 2 · · · 21 2 3 3 · · · 31 2 3 4 · · · 4...
......
.... . .
...1 2 3 4 · · · n
n×n
c) A =
1 0 0 · · · 0a 1 0 · · · 0a2 a 1 · · · 0...
......
. . ....
an an−1 an−2 · · · 1
n×n
(a ∈ R).
d) A =
0 −4 5 −4 −3 −3
0 −12 15 −9 −13 −13
0 −8 10 −8 0 0
0 −20 25 −19 −7 −7
e) A =
−1 2 −1 2−1 7 3 23 −1 9 −6−5 0 −19 10−5 0 −19 10
f ) A =
1 0 0 0 0 0 0 0 0 0
2 1 0 0 0 0 0 0 0 0
3 2 1 0 0 0 0 0 0 0
4 3 2 1 0 0 0 0 0 0
5 4 3 2 1 0 0 0 0 0
6 5 4 3 2 1 0 0 0 0
15 13 11 9 7 5 3 1 0 0
8 7 6 5 4 3 2 1 0 0
9 8 7 6 5 4 3 2 1 0
10 9 8 7 6 5 4 3 2 1
22. Demuestre que si X es una inversa por derecha de A, entonces el sistema Ax = b es compatible y una solucionparticular de el es xp = Xb.
23. Demuestre que si Y es una inversa por izquierda de A y el sistema Ax = b es compatible, entonces su soluciones unica y esta dada por xp = Y b. Pruebe, mediante un ejemplo, que es posible que una matriz A tenga unainversa por izquierda y que, al mismo tiempo, exista un b tal que Ax = b es incompatible.
24. Sea A =
1 2 3 01 1 0 21 −1 −6 p
. Determine los valores del parametro real p para que:
a) A tenga inversa por derecha.
b) A tenga inversa por izquierda.
25. Sea A =
1 −1 0 k
k 1 k 1−1 1 −k 0
, donde k es un parametro real. Encuentre una inversa por derecha de A para
todos aquellos valores de k para los cuales esto sea posible.
26. Demuestre que si una matriz cuadrada tiene una fila de ceros o una columna de ceros, entonces no es invertible.
27. a) Si A es una matriz de n×n tal que A4−A3−A2+A+ I = O, demuestre que A es invertible y encuentreA−1 en funcion de A.
b) Sea B una matriz de n × n invertible tal que B5 − B = O. Encuentre B−1 en funcion de B. Si no sesupiera que B es una matriz invertible, ¿puede concluirse del hecho que B5 −B = O?
28. a) Sea A = (1)n×n. Encuentre k ∈ R tal que (I −A)−1 = I+ kA.
b) Sean A y B dos matrices de n × n, invertibles, tales que A + B tambien es invertible. Demuestre queA−1 + B−1 es invertible y que (A−1 +B−1)−1 = A(A +B)−1B.
c) Si existe un numero natural p para el cual la matriz cuadrada de orden n A cumple que Ap = O,demuestre que (A− I) es invertible y encuentre su matriz inversa.
30

d) Sean A,B,C tres matrices de orden n × n, tales que A,B son simetricas y A es invertible. Demuestreque la matriz CT (A−1 +B)C es simetrica.
29. Sea A una matriz no nula de orden n× n. Se definen B = kA+ I y C = A2 −A+ I. Encuentre k ∈ R tal queB−1 = C cuando
a) A2 = 3A b) A2 = O
30. Si A y B son matrices de n× 1 y ATB 6= 1, demuestre que
(I−ABT )−1 = I+ABT
1−ATB
31. Sea A,B,C,D y E matrices de n× n tales que A y C −D son matrices invertibles. Encuentre matrices X eY tales que {
AX +AY = B
XC + Y D = E
32. Para cada k ∈ R, se define Ak =
1 0 k
−k 1 − 1
2k
0 0 1
.
a) Demuestre que para todo par de reales p, q se tiene que ApAq = Ap+q.
b) Determine el o los valores de k, si existen, para los cuales Ak es simetrica o antisimetrica.
c) Demuestre que para todo k ∈ R, Ak es invertible y calcule A−1
k (Note que A0 = I).
33. Sea A una matriz tal que
1 2 3 1 −12 5 3 1 31 0 8 2 −23 1 −1 1 21 −1 3 −3 1
A =
1 −1 1 0 00 1 0 0 00 0 1 0 00 0 −1 1 20 0 3 −3 1
Calcule A−1.
34. Considere las matrices A = (aij)n×n y B = (bij)n×n, donde
aij =
1 i = j
−1 i = j + 10 en otro caso
y bij = i
Sin calcular las inversas, decida si las matrices A, B y BA son invertibles.
35. En cada caso, determine los valores de k ∈ R para los cuales la matriz A es invertible.
a) A =
k 0 10 k 01 0 k
b) A =
k 1 00 1 k
k 0 1
c) A =
3 −k 2−5 k + 5 −51 3 1− k
d) A =
k 0 k
2k k −k
1 −k 1
31

Respuestas:
1. A =
0 −3 −8 −153
20 −
5
2−6
8
3
5
30 −
7
3
15
43
7
40
, B =
(0 −
1
3−
1
2−
3
5−
2
3
1
30 −
1
5−
1
3−
3
7
), C =
(1 1 1 2 2 3 3
2 1 2 3 3 4 4
3 1 1 3 3 4 4
),
D =
1 0 0 −1 0 0 0 0 · · ·
0 1 0 0 −1 0 0 0 · · ·
0 0 1 0 0 −1 0 0 · · ·
0 0 0 1 0 0 −1 0 · · ·
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
...
.
2. B = (2i+ j − 2)n×n.
3. a. Es t.l. b. No es t.l. c. No es t.l. d. No es t.l. e. Es t.l.
4. La matriz asociada a T es AT .
5. T (x, y, z, t) = (x + z, 2x+ y + 3z, 3x+ 2y + 5z) y A =
(1 0 1 0
2 1 3 0
3 2 5 0
).
6. b. L : 6x− y = 0
7. No
8. a. A =(−1 4
−1 5
)y T (x, y) = A
(x
y
)=
(−x+ 4y−x+ 5y
)b. Un triangulo cuyos vertices son (3, 3), (−2, 4) y
(−24,−27).
9. p = q.
10. No existen.
11. Mu =
151515
, uTM = (15 15 15), MB =
(15 15 15
15 15 15
15 15 15
), BM −MB = O y 1
45uTMu = 1.
15. Los posibles valores de k y d son: (k, d) = (1, 0), (k, d) = (−1, 0), (k, d) =(2−nn
, 2
n
)y (k, d) =
(n−2
n,− 2
n
).
16. a. An =(2n−1 2n−1
2n−1 2n−1
)b. An =
(2n−1αn
0 2n−1αn
0 αn0
2n−1αn
0 2n−1αn
)c. An =
(αn n · αn−1
0 αn
)
d. An =
αn n · αn
n∑
i=1
i αn
0 αn n · αn
0 0 αn
17. A100 =
(1 0 0
50 1 0
50 0 1
)
20. X =
1 −1 −1 0 01 1 −1 −1 00 1 1 −1 −10 0 1 1 −10 0 0 1 2
21. a), d), e) No tienen inversas por laderecha ni por la izquierda b), c), f) Tienen inversas por la derecha ypor la izquierda.
24. a. A tendra inversa por derecha cuando p 6= 6. b. A no tiene inversa por izquierda pues tiene menos filas quecolumnas.
32
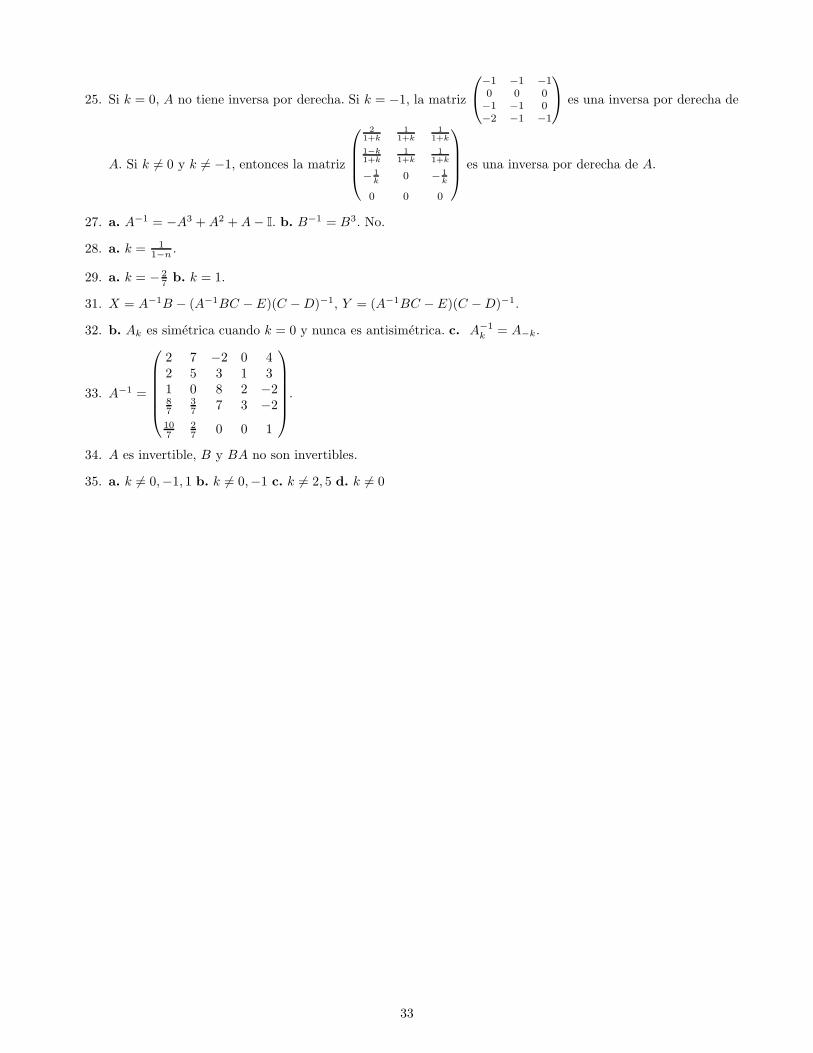
25. Si k = 0, A no tiene inversa por derecha. Si k = −1, la matriz
−1 −1 −1
0 0 0
−1 −1 0
−2 −1 −1
es una inversa por derecha de
A. Si k 6= 0 y k 6= −1, entonces la matriz
2
1+k
1
1+k
1
1+k
1−k
1+k
1
1+k
1
1+k
−
1
k0 −
1
k
0 0 0
es una inversa por derecha de A.
27. a. A−1 = −A3 +A2 +A− I. b. B−1 = B3. No.
28. a. k = 1
1−n.
29. a. k = − 2
7b. k = 1.
31. X = A−1B − (A−1BC − E)(C −D)−1, Y = (A−1BC − E)(C −D)−1.
32. b. Ak es simetrica cuando k = 0 y nunca es antisimetrica. c. A−1
k = A−k.
33. A−1 =
2 7 −2 0 42 5 3 1 31 0 8 2 −28
7
3
77 3 −2
10
7
2
70 0 1
.
34. A es invertible, B y BA no son invertibles.
35. a. k 6= 0,−1, 1 b. k 6= 0,−1 c. k 6= 2, 5 d. k 6= 0
33