123456789
DESCRIPTION
nmTRANSCRIPT

G P S D i f e r e n c i a l | 1
I N T RO D UC C I O N
Hoy en día, la tecnología da para mucho. Cada vez más, nos maravillamos de los avances que se dan en el campo tecnológico y electrónico. Uno de ellos, que no lleva mucho tiempo en funcionamiento, es el Sistema de Posicionamiento Global o GPS (global positioning system). La funcionalidad de éste sistema, es netamente de ubicación de objetos. Tanto aéreos como terrestres. El sistema GPS, funciona por medio de 24 satélites (conocidos como NAVSTAR), que constantemente están dando la vuelta a la órbita terrestre. Estos 24 satélites, rodean la tierra en seis diferentes direcciones. Esto ocurre, para que puedan tener una mejor cobertura del globo. Ahora, cada satélite, logra dar dos vueltas a la tierra por día. Otra variable, que facilita y ayuda a lograr una mayor precisión al sistema GPS.
Este sistema como tal, está operativo desde fines de la década de los 70`. Claro, que su uso inicial, fue estrictamente militar. Varios años tuvieron que pasar, para que el servicio se adaptara al público en general.
Los satélites o NAVSTAR, se comunican constantemente con los dispositivos GPS, que están ubicados en la tierra. Los satélites transmiten información propia de ellos, que número son, la posición de ellos y con la confirmación de la hora en que se envía el mensaje. Hora que corr4esponde a la zona que está surcando. Y acá está la gracia del GPS, éste compara la hora en que fue recibido el mensaje, con la hora en que fue enviado. Con ello calcula donde está el satélite. Luego con el resto de los satélites, se realiza una triangulación hacia el dispositivo en tierra, con lo que se puede saber dónde se está exactamente. Por lo que el dispositivo GPS en tierra, recibirá las coordenadas de longitud, latitud y altitud. Aparte del servicio anexo de dirección de viaje o ruta. Es por ello que cuando un automóvil, posee un GPS, el piloto puede conocer el camino más corto a casa o cómo se llega a una dirección. Ya que los sistemas GPS terrestres, poseen en la memoria, los planos de las ciudades en que funcionan.
Con respecto a la señal en que funcionan los GPS, los satélites transmiten dos tipos de señales, laLI y la L2. Los GPS que pertenecen a los civiles, utilizan la señal LI.

G P S D i f e r e n c i a l | 2
PR I N C I P I O DE FU N CI O N A M I E N T O D EL G PS
El SPG o GPS (Global Positioning System: sistema de posicionamiento global) o NAVSTAR-GPS1 es un sistema global de navegación por satélite (GNSS) que permite determinar en todo el mundo la posición de un objeto, una persona o un vehículo con una precisión hasta de centímetros (si se utiliza GPS diferencial), aunque lo habitual son unos pocos metros de precisión.
El GPS funciona mediante una red de 24 satélites en órbita sobre el planeta tierra, a 20.200 km, con trayectorias sincronizadas para cubrir toda la superficie de la Tierra. Cuando se desea determinar la posición, el receptor que se utiliza para ello localiza automáticamente como mínimo tres satélites de la red, de los que recibe unas señales indicando la identificación y la hora del reloj de cada uno de ellos. Con base en estas señales, el aparato sincroniza el reloj del GPS y calcula el tiempo que tardan en llegar las señales al equipo, y de tal modo mide la distancia al satélite mediante "triangulación" (método de trilateración inversa), la cual se basa en determinar la distancia de cada satélite respecto al punto de medición.

G P S D i f e r e n c i a l | 3
Medición de las Distancias
El sistema GPS funciona midiendo el tiempo que tarda una señal de radio en llegar hasta el receptor desde un satélite y calculando luego la distancia a partir de ese tiempo.
Las ondas de radio viajan a la velocidad de la luz: 300.000 km/sg en el vacío. Así, si podemos averiguar exactamente cuando recibimos esa señal de radio, podremos calcular cuanto tiempo ha empleado la señal en llegar hasta nosotros. Por lo tanto, solo nos falta multiplicar ese tiempo en segundos por la velocidad de la luz (300.000 km/s) y el resultado será la distancia al satélite.
La clave de la medición del tiempo de transmisión de la señal de radio, consiste en averiguar exactamente cuando partió la señal del satélite. Para lograrlo se sincronizan los relojes de los satélites y de los receptores de manera que generen la misma señal exactamente a la misma hora. Por tanto, todo lo que hay que hacer es recibir la señal desde un satélite determinado y compararla con la señal generada en el receptor para calcular el desfase. La diferencia de fase será igual al tiempo que ha empleado la señal en llegar hasta el receptor

G P S D i f e r e n c i a l | 4
G E N E R A L I DA D ES DE LOS S A T E L I T ES
DATUM
Un datum está constituido por una superficie de referencia geométricamente definida, habitualmente un elipsoide, dado por la longitud, latitud, y altura, y un punto fundamental en el que la vertical del geoide y al elipsoide sea común.
La altimetría se refiere al geoide como altura H. Es evidente que como el geoide es una superficie irregular, sólo coincidente con el elipsoide al menos en el punto fundamental del datum elegido, habrá que tener en cuenta la separación del geoide y elipsoide, u ondulación del geoide. Estableciéndose la expresión h=N+H. Del sistema del satélite podemos obtener h, pero sin una buena carta del geoide no podremos conocer N ni calcular H que es el valor que necesitaremos para trabajar topográfica y geodésicamente.
Desde el punto de vista de las coordenadas de los satélites no se complica demasiado el problema, pues solo hay que añadir a las fórmulas que daban su posición en el sistema inercial los parámetros de rotación terrestre antes mencionados; en cualquier caso las coordenadas del satélite seguirán siendo variables en función del tiempo.
Desde este sistema de referencia podemos pasar a otros, como al elipsoide, por ejemplo, mediante un proceso matemático, obteniendo longitud, latitud y altura, una vez conocida la orientación y situación de la superficie de referencia definida por el datum. Si conocemos la altura del geoide N sobre el elipsoide, podremos manipular altitudes ortométricas sobre el geoide, que son las que queremos usar normalmente porque son directamente mensurables.
Segmento Usuario
Hablando de la utilización del GPS como instrumento topográfico este segmento comprende los siguientes elementos (equipo de campo):
A n t e n a : Componente que se encarga de recibir y amplificar la señal recibida por los satélite
G P S D i f e r e n c i a l | 5
Re c ep t o r : Recibe la señal recogida por la antena y decodifica esta para convertirla en información legible.
T e r m i n al G P S o U n i d ad d e C o n t r o l: Ordenador de campo que muestra la información transmitida por los satélites y recoge todos datos útiles para su posterior cálculo, de aplicaciones Topográficas
D.O.P. (Dilution of Precision)Es la contribución puramente geométrica a la incertidumbre de un posicionamiento. Es un valor adimensional descriptivo de la "solidez" de la figura observable constituida por los satélites.
Su valor ideal es 1, si la geometría empeora, el valor aumenta, llegándose a producir un "outage" o situación en la que, aunque haya sobrados satélites a la vista, deba suspenderse la observación porque el DOP llegue a exceder de un cierto valor preestablecido, como 6, limite habitualmente empleado. El DOP es un factor por el que debe ser multiplicado el error obtenido en las determinaciones de distancias a los satélites para establecer el correspondiente error de posicionamiento.
Los DOPs más utilizados son:
* GDOP: tres coordenadas de posición y estado del reloj.* PDOP: tres coordenadas de posición.* HDOP: dos coordenadas de posición planimétrica.* VDOP: solo la altitud.* TDOP: solo estado del reloj.
G P S D i f e r e n c i a l | 6
Máscaras de Elevación
Es el ángulo de elevación mínimo que tendrán los satélites para que recibamos señal de estos. Este ángulo es configurable y se considera como el mínimo ideal de 15º de elevación, ya que por debajo de este ángulo, la señal recibida de los satélites, está muy influenciada por la refracción atmosférica.
Escala de Tiempo
Para definir el tiempo usado en el sistema GPS se empezará por la definición del Tiempo UniversalUT. El UT en el tiempo solar medio referido al meridiano de Greenwich.
El UT0 es el tiempo universal deducido directamente a partir de observaciones estelares y considerando la diferencia entre día universal y sidéreo de 3 minutos 56,555 segundos.
El UT1 es el UT0 corregido de la componente rotacional inducida por el movimiento del polo. El UT2 es el UT1 corregido por variaciones periódicas y estacionales en la velocidad de rotación de la Tierra. Esta escala es equivalente a la Greenwich Mean Time GMT.
El tiempo universal coordinado UTC es un tiempo atómico uniforme, cuya unidad en el segundo atómico. Es básicamente igual al UT2, al que se aproxima muchísimo mediante correcciones llamadas segundos intercalares (leap second) que son sucesivos incrementos de un segundo, motivados por la variación de la velocidad de rotación de la Tierra.

G P S D i f e r e n c i a l | 7
G PS D I FE R N C I AL O D G PS
El DGPS (Differential GPS), o GPS diferencial, es un sistema que proporciona a los receptores de GPS correcciones de los datos recibidos de los satélites GPS, con el fin de proporcionar una mayor precisión en la posición calculada.
El fundamento radica en el hecho de que los errores producidos por el sistema GPS afectan por igual (o de forma muy similar) a los receptores situados próximos entre sí. Los errores están fuertemente correlacionados en los receptores próximos.
Un receptor GPS fijo en tierra (referencia) que conoce exactamente su posición basándose en otras técnicas, recibe la posición dada por el sistema GPS, y puede calcular los errores producidos por el sistema GPS, comparándola con la suya, conocida de antemano. Este receptor transmite la corrección de errores a los receptores próximos a él, y así estos pueden, a su vez, corregir también los errores producidos por el sistema dentro del área de cobertura de transmisión de señales del equipo GPS de referencia. En suma, la estructura DGPS quedaría de la siguiente manera:
Estación Monitorizada (referencia)
Conoce su posición con una precisión muy alta. Esta estación está compuesta por:
Un receptor GPS. Un microprocesador, para calcular los errores del sistema GPS y para generar la estructura
del mensaje que se envía a los receptores. Transmisor, para establecer un enlace de datos unidireccional hacia los receptores de los
usuarios finales. Equipo de usuario, compuesto por un receptor DGPS (GPS + receptor del enlace de datos
desde la estación monitorizada).
Los errores que se eliminan utilizando el método diferencial son los siguientes:
Disponibilidad selectiva (SA) Retardo ionosférico. Retardo troposférico. Error en la posición del satélite (efemérides)

G P S D i f e r e n c i a l | 8
Errores producidos por problemas en el reloj satélite

G P S D i f e r e n c i a l | 9
Para que las correcciones DGPS sean válidas, el receptor tiene que estar relativamente cerca de alguna estación DGPS; generalmente, a menos de 1000 km. Las precisiones que manejan los receptores diferenciales son centimétricas, por lo que pueden ser utilizados en ingeniería.
Dentro del método diferencial y atendiendo al tipo de aplicación, tendríamos que hacer una nueva distinción:
Método diferencial con Código (precisiones de 0,3 m. a 5 m.)
Estáticos : entidades puntuales y nodos de entidades lineales y de áreas Cinemáticos: levantamientos de entidades lineales y de área sin nodos
intencionados, es decir levantados por tiempo de manera automática.
Método diferencial con medidas de fase (precisiones de 5 mm. a 30 mm.)
M E T ODO E S T A T I C O
1. Estático
Los receptores se quedan fijos sobre las respectivas estaciones. Es el método de posicionamiento clásico de observación de medidas de líneas superiores a 15 km con el máximo de precisión. La medición estática, ha sido durante años el soporte principal de GPS. Es la más sencilla pero la más lenta, por lo general se requiere de 1 a 2 horas de medición o más según la longitud de las líneas bases.
A mayor distancia corresponde mayor tiempo de observación, la relación es directamente proporcional.
Aplicaciones
Control Geodésico. Redes Nacionales e internacionales. Control de movimientos tectónicos. Control de deformaciones en diques y estructuras. No es recomendable par levantamientos topográficos
Ventajas
Más preciso, eficiente y económico que los métodos topográficos tradicionales. Sustituye al método clásico de triangulación.
Tendremos que recordar que las coordenadas que se obtienen están referidas al elipsoide WGS-84, y como recordamos tendremos que incluir en la medición de está triangulación, al menos 3

G P S D i f e r e n c i a l | 10
Puntos de coordenadas conocidas en el sistema donde queramos dar nuestras coordenadas, que por lo general, serán UTM.
2. Estático Rápido.
Este método es una mejora del anterior. La ventaja más importante es la reducción de las duraciones de las observaciones: 5 a 10 min para una distancia de 10 Km. Sin embargo, esta técnica solo alcanza niveles óptimos para distancias relativamente cortas (5 a 10), y mediante la utilización de receptores bifrecuencias.
Las distancias máximas que pueden existir entre la referencia y el móvil es de 20 Km. La máscara de elevación que se introduce es, como se ha comentado anteriormente, de 15° de elevación
Estacionamiento de una estación de referencia temporal: observa y almacena datos de todos los satélites a la vista continuamente.
El Receptor móvil se estaciona en el punto que se pretende levantar. Estaremos en el punto el tiempo que nos indique las tablas en función del Nº de satélites,
distancia a la referencia, GDOP, etc. Los tiempos breves de observación posibilitan una precisión de 5 a 10 mm. – 1 ppm.
(EMC)
Aplicaciones
Levantamientos de control, densificación. Sustituye al método clásico de poligonáceo. Determinación de puntos de control, ingeniería civil, bases de replanteo. Levantamiento de detalles y deslindes. Cualquier trabajo que requiera la determinación rápida de un elevado número de puntos. Apoyos fotogramétricos.
Ventajas
Sencillo, rápido y eficiente comparado con los métodos clásicos. No requiere mantener el contacto con los satélites entre estaciones. Se apaga y se lleva al siguiente punto. Reducido consumo de energía. Ideal para un control local. No existe transmisión de errores ya que cada punto se mide independientemente.
Inconvenientes
No se puede utilizar en zonas de población, cerca de edificios, debido al efecto multipath y en general en zonas que nos impidan recibir cuatro o más satélites.

G P S D i f e r e n c i a l | 11
Este método de posicionamiento se puede utilizar simultáneamente con el estático, realizando la triangulación con método estático y la densificación con el estático rápido, tal como se muestra en la figura.
El tiempo de observación depende de los siguientes factores:
Longitud de la línea- base. Numero de satélites. Geometría de los satélites. GDOP. Ionosfera. Depende de los disturbios de la ionosfera, día/noche, Mes, año, posición sobre la tierra.
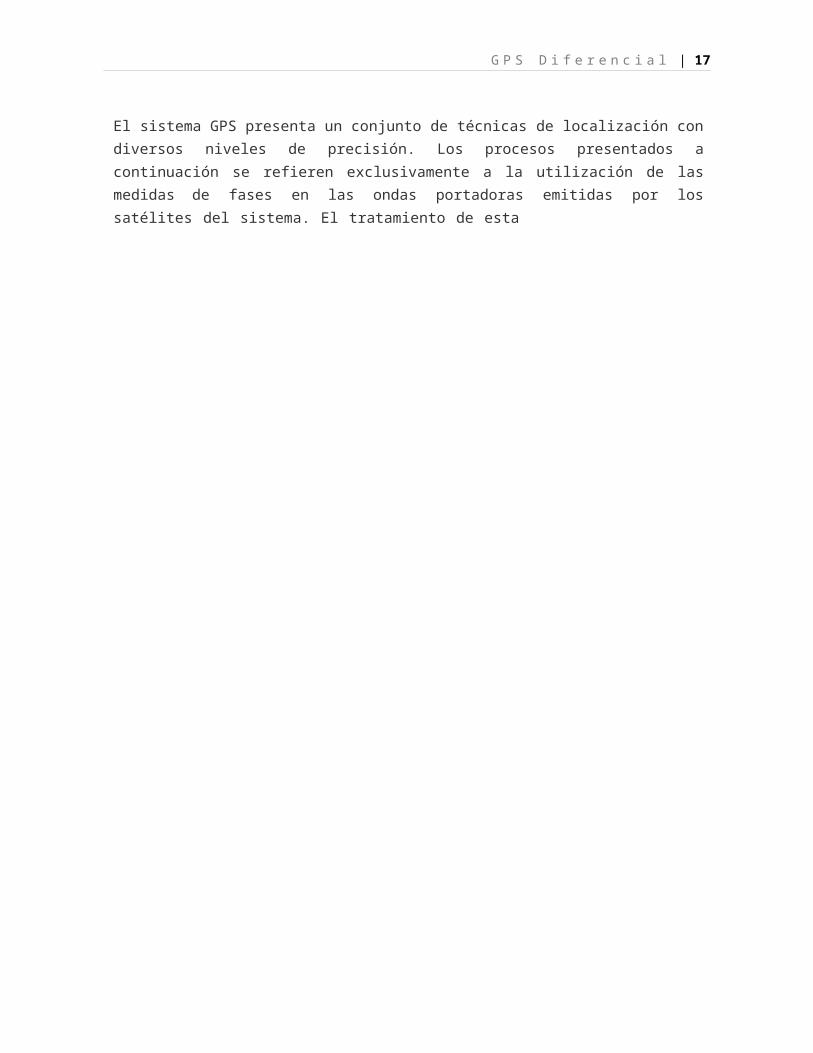
PAR A M E T ROS OP T I M OS P A R A MED I C I ONES DE P RE C I S I ÓN
El sistema GPS presenta un conjunto de técnicas de localización con diversos niveles de precisión. Los procesos presentados a continuación se refieren exclusivamente a la utilización de las medidas de fases en las ondas portadoras emitidas por los satélites del sistema. El tratamiento de esta
G P S D i f e r e n c i a l | 12
Observaciones se efectúa obligatoriamente en modo diferencial de manera que se elimine los ruidos sistemáticos relacionados con los satélites y los receptores.
Procesos Comunes para los Levantamientos con GPS.
Calibración
El procedimiento habitual es el del intercambio de antenas en una línea base de algunos metros, preferentemente conocida. Las mediciones efectuadas con una redundancia suficiente permiten definir un "offset" por antena y por frecuencia (L1/L2), asociado a una desviación típica, que se introduce en los cálculos de las líneas base.
La Instalación
La experiencia demuestra que la instalación incorrecta es a menudo el principal motivo de error en los métodos de posicionamiento con GPS.Centrado: Las antenas se centran con un sistema de plomo óptico controlado con regularidad.
Orientación: Las antenas están siempre orientadas hacia el norte geográfico, obtenido con una brújula.
Altura de antena: Se efectúan tres mediciones de la distancia oblicua marca/borde de plano de absorción. Dicha etapa permite controlar la horizontalidad del plano de la antena, así como, en menor medida, la calidad del centrado. Se ejecutan en dos unidades, centímetros (con una precisión milimétrica) y pulgada, para evitar el riesgo de un error grave (típicamente el decímetro).Cada uno de estos tres elementos mencionados se controla al inicio y al final de los periodos de medición.
G P S D i f e r e n c i a l | 13
T E R C E R A P A R T E: C OR R E C C I ONES
Correcciones
Igualmente que en todos los equipos que utilizamos, una observación GPS también está sometida a varias fuentes de error que se pueden minimizar dependiendo del equipo que utilicemos y metodología de la observación. El principal objetivo por el cual se realiza la corrección en los levantamientos usando DGPS es el aumento de precisión en los datos además de la eliminación de errores producidos de varias formas.
Fuentes de Error
Los errores que afectan las mediciones con GPS se pueden agrupar en tres tipos diferentes:
1. Errores Propios del Satélite.
1.1 Err o r e s Or b itales (de efemérides): afectan la determinación de la posición del satélite en un instante determinado con respecto a un sistema de referencia dado. Estos errores se originan debido a que no se conocen con la exactitud necesaria las órbitas de los satélites.
1.2 Err o r e s d e Rel o j : aunque sumamente precisos, los relojes atómicos pueden presentar variaciones debido a la deriva propia del instrumento y a la acción de los efectos relativísticos que originan un diferencial del tiempo entre el sistema del satélite y del sistema del GPS. Este diferencial de tiempo no es constante para todos los satélites, sin embargo, estos errores, de muy poca magnitud, son ajustados por el Departamento de Defensa de los Estados Unidos.
1.3 Err o r e s d e C o n fi g u ración Ge o m é trica: el efecto de la geometría en la ubicación de los satélites utilizados en la determinación de un posicionamiento queda expresado por los parámetros de la dilación de precisión geométrica.
Los cuatro parámetros de la dilación de precisión geométrica son:
PDOP: dilación de precisión para la posición. HDOP: dilación de precisión horizontal. VDOP: dilación de precisión vertical. TDOP: dilación de precisión del tiempo.
La configuración geométrica ideal se da cuando la posición relativa entre satélites forma ángulos agudos. Por el contrario, una configuración geométrica pobre se da cuando los satélites están alineados o su posición relativa forma ángulos llanos.

G P S D i f e r e n c i a l | 14
2. Errores Originados por el Medio de Propagación.
Los cálculos en el posicionamiento por satélite asumen que la señal viaja a una velocidad constante igual a la de la luz. Sin embargo, la velocidad de la luz se mantiene constante Solamente en el vacío. Cuando la señal penetra la ionósfera y la tropósfera debido a los cambios en densidades de las diferentes capas, se producen las refracciones ionosféicas y troposféricas, reduciendo la velocidad de la señal. Actualmente los receptores de GPS toman en cuenta estas demoras haciendo las correcciones pertinentes.
2.1 Obstr u cc i o n es p o r la o r o g raf í a del t e r r en o .
2.2 R e t ar d o de la s e ñ al G P S al atr a v esar la a t m ó sfera.
2.3 R eb o te de s e ñ a l es G P S ( M u lti p ath

G P S D i f e r e n c i a l | 15
3. Errores en la Recepción.
Por ser los errores en la recepción solamente dependientes del modo de medición y del tipo de receptor, se presenta una ligera mención de los mismos.
Los errores en la recepción son el ruido, centro de fase de la antena, errores del reloj oscilador y el error de disponibilidad selectiva (S/A), el cual es una degradación de la señal del satélite causada en forma intencional por el Departamento de Defensa de los Estados Unidos.
Correcciones de Errores
Los errores que pueden producirse citados anteriormente se reducen de la siguiente manera:
El sesgo del oscilador de los satélites mediante las correcciones enviadas por las estaciones de seguimiento.
El sesgo orbital mediante las efemerides radiofundidas igualmente las estaciones de seguimiento. Se puede conseguir las efemérides precisas de un día de observación.
El retraso ionosférico mediante la utilización de dos frecuencias y el proceso diferencial.
El multipath. Se situará la antena de tal forma que evitemos este tipo de ondas y nos serviremos de planos de tierra si es preciso.
Los errores debidos al oscilador del receptor los resolveremos observando diferencialmente.
Los errores de manipulación se producen cuando no se siguen las indicaciones del fabricante del instrumento y que suelen descuidarse cuando se trabaja rutinariamente.
El error de disponibilidad selectiva se corrige mediante la técnica de la corrección diferencial, en la cual se usa un receptor en una estación base cuya posición se
G P S D i f e r e n c i a l | 16
conoce con precisión y un receptor en el punto que se desea ubicar, recolectando datos simultáneamente.
Con la información obtenida en la estación base se calculan los diferenciales o correcciones que deben aplicarse a las mediciones del receptor en la estación del punto a ubicar.
Por ejemplo, es importante que no se comience una observación hasta que no se haya sincronizado perfectamente con los satélites ya que lo único que estaremos haciendo es introducir ruido a la observación.
Métodos de Corrección Diferencial
Como ya se explicó anteriormente los métodos de correcciones diferenciales requiere un receptor de coordenadas conocidas, mide las coordenadas GPS y conoce la corrección a aplicar, dicha corrección se aplica al equipo móvil. Es una corrección llamada de base única donde la precisión del equipo móvil empeora según nos alejamos de la estación de referencia. Elimina los errores tales como: velocidad de la onda, errores de reloj y orbita, multitrayectoria, disponibilidad selectiva, etc.Dichos métodos pueden clasificarse de dos maneras:
1. Tiempo Real (Corrección en el Campo)
EGNOS: recibida en la propia señal de satélite, satélites geoestacionarios, precisión submétrica.
RTCM, CMR, CMR +: recibida mediante teléfono móvil conectado a las redes de estaciones de referencia de las C.C.A.A.
Aplicación: replanteos (materializar un punto en el terreno) y geolocalización(entendida como navegación a un punto)
2. Post – Proceso (Corrección en la Oficina)
Las estaciones de referencia registran las correcciones en formato RINEX, que se pueden descargar vía Internet y aplicar a las medidas móviles mediante el software de oficina:
Software Trimble Pathfinder Office
Software GPS Analyst en entorno de ArcGIS Desktop (ESRI)
G P S D i f e r e n c i a l | 30
En resumen, los modelos de errores se pueden corregir asi:
PAR A M E T ROS DE PRO C E S O DE D A T OS
Máscara de Refracción
La recepción por debajo de 15º por encima de horizonte está muy afectada por la refracción atmosférica. El uso de este tipo de información impide la consecución de resultados precisos.
Normalmente se emplea una máscara de refracción, para que el receptor no adquiera información de satélites por debajo de una determinada altura sobre el horizonte.
Como consecuencia hay que planear la observación teniendo en cuenta la máscara de refracción que se va a usar, que afectará a los valores del GDOP.
Luego, al procesar la información grabada en campo, se puede aumentar más la pantalla, pero hay que tener cuidado, pues puede cambiar el GDOP, y al ser mayor que el previsto, si se pierden satélites, puede que no obtengamos resultados coherentes con los planeados.
Teniendo esto en cuenta, a veces puede ser interesante, en post-proceso, aumentar la máscara a20º, si la Ionosfera está muy activa, lo que mejoraría los resultados.
Puede ocurrir que una línea base calculada se salga de tolerancia, usando incluso 5 satélites, si alguno de éstos no sube más de 20º. En estos casos puede mejorar el resultado subir la máscara a20º y calcular sólo con 4 satélites de elevación mayor.

G P S D i f e r e n c i a l | 31
Estrategia de Cálculo: Selección de Líneas-Base
Antes de comenzar el proceso de cálculo hay que considerar cuál es la mejor forma de calcular la red, hay que juzgar los siguientes aspectos:
Obtención de coordenadas WGS-84 de un punto. Conexión con el Datum Local. Cálculo de las Estaciones de Referencia. Distinción entre líneas bases largas y cortas
Hay que enlazar el punto WGS-84 con las Referencias. Después calcular la red de Referencias, también es interesante, al iniciar el cálculo, conectar con los puntos conocidos en el Datum Local.
Para el cálculo de las Referencias es aconsejable hacer bisecciones o polisecciones, pues de ellas dependen los demás puntos observados.
Al radiar el resto de los puntos observados, es aconsejable hacer selecciones de conjuntos de líneas bases de aproximadamente la misma longitud y calcularlas por separado.
Interpretación de los Resultados
Líneas Base de Menos de 20 km
Para este tipo de líneas bases siempre se intenta aplicar FARA. Este algoritmo busca todas las posibles combinaciones de ambigüedades y calcula el emc de una observación sola de cada conjunto formado. Entonces extrae las soluciones con emc más bajos.
Introduce los valores en un nuevo cálculo y elige la solución más coherente. Esta decisión se basa en métodos estadísticos con criterios muy restrictivos que aseguran la mayor probabilidad de obtener un resultado digno de confianza, pero es imposible eliminar la posibilidad de llegar a un resultado erróneo.
Hay que tener en cuenta que, hasta 20 km, debe ser posible la solución de ambigüedades si se han tomado las suficientes observaciones. Habrá que repasar el proceso, si no ha tenido éxito, para ver si se ha cometido algún error conceptual.
Líneas Base de Más de 20 km
Para estas se aplica el observable L3, y no se intenta resolver ambigüedades. De todas formas, no aporta beneficios intentarlo para líneas bases de más de 20 km.
A continuación se muestran las pantallas del Software SKI sobre la planificación de una

G P S D i f e r e n c i a l | 32
Observación en el día19 de Septiembre de 1996 sobre el horizonte de MADRID de coordenadas:
Longitud.....3º 41' W Latitud..... 40º 24' N Altura....710 m.
Ventajas e Inconvenientes que Proporciona un Trabajo con GPS
Las ventajas de los trabajos con GPS aumentan día a día conforme mejoran los instrumentos. Sin embargo podemos citar unas cuantas ventajas frente a los trabajos realizados mediante instrumentos y métodos clásicos.
Las condiciones meteorológicas adversas no son obstáculo para trabajar con GPS, ya sea niebla, lluvia, calima, polvo o nieve. No es necesario que el operador tenga que ver el blanco o la estación, según dónde se encuentre: la intervisibilidad entre estación y punto medido no es necesaria.
Una sola persona puede realizar el trabajo, no es necesario que haya una persona en la estación y otra en el punto medido.
La precisión de los trabajos es más homogénea, ya que el error el único en cada punto: no se van acumulando en un itinerario o radiación.
Se puede trabajar con un equipo en un radio aproximado de unos 10 Km., frente a los 2.5 Km. que proporcionan las estaciones totales convencionales de alta gama.Se puede trabajar sorteando obstáculos sin necesidad de establecer nuevas estaciones o puntos destacados.
No es necesario realizar punterías. No es necesario comunicarse con el operario situado en el punto o la estación, ya que éste
no existe. No hay que realizar cambios de estación continuamente. No es necesario realizar comprobaciones continuas cada vez que estacionamos. Disminuye el número de errores o equivocaciones producidas por la intervención humana.
Por otro lado los inconvenientes más relevantes:
No puede ser utilizado en obras subterráneas y a cielo cerrado. Tiene dificultades de uso en zonas urbanas, cerradas, con edificios altos y zonas arboladas
y boscosas, debido a las continuas pérdidas de la señal de los satélites. Este problema, no obstante, se está solucionando, y de forma satisfactoria, con el uso combinado de las constelaciones GPS y GLONASS para mantener siempre cinco o más satélites sobre el horizonte.
El desconocimiento del sistema. El sistema de posicionamiento por satélite es una gran herramienta, y de fácil uso, pero ello no lleva consigo eximirse de su conocimiento y del
G P S D i f e r e n c i a l | 33
tratamiento de sus observables correctamente, ya que de lo contrario, se pueden obtener resultados poco satisfactorios en precisión y rendimiento.
Conclusiones
Como conclusión final de todo lo expuesto con anterioridad, podemos afirmar de manera evidente las ventajas del sistema GPS frente a los métodos tradicionales, entre otras: rapidez, fiabilidad, reducción de costos, precisión, etc.
En la actualidad es difícil imaginar la topografía sin el GPS, y debemos acabar con el rechazo que se produce ante toda nueva tecnología o equipo, puesto que el sistema GPS es toda una realidad.
En los foros topográficos se compara la aparición del sistema GPS con los cambios producidos ante la aparición de las estaciones totales en la década de los setenta, pero no es comparable, pues aunque las estaciones totales agilizaron y facilitaron el trabajo, los métodos, procedimientos, cálculos, etc. Siguieron siendo los mismos que en siglos pasados. Con el sistema GPS no ha ocurrido esto, todo es distinto, los procedimientos, cálculos, métodos, etc.
En relación con muchos trabajos realizado, la gran ventaja del sistema GPS, sin duda ha sido el hecho de poder obtener posicionamientos absolutos con la precisión necesaria en tiempo real, requisito imprescindible en la topografía minera, además de la posibilidad de implementar procedimientos de automatización de maquinaria y control de flotas de producción.
Además de la gran precisión que logramos en la toma de datos mediante el método de DGPS, se puede realizar ciertas correcciones en un post – proceso (correcciones en oficina) a través de softwares amigables con el usuario.

G P S D i f e r e n c i a l | 25

G P S D i f e r e n c i a l | 26

G P S D i f e r e n c i a l | 5

G P S D i f e r e n c i a l | 6