1. presentación filtro de kalman
TRANSCRIPT
8/16/2019 1. Presentación Filtro de Kalman
http://slidepdf.com/reader/full/1-presentacion-filtro-de-kalman 1/12
PRESENTACIÓNThe Discrete-Time Kalman Filter
(Simon, 2006)
Esteban Franco Montoya
Esteban López de Mesa Aguilar
Materia: Estimación No Linea de Estado
Profesor: Héctor Antonio Botero Castro
1

8/16/2019 1. Presentación Filtro de Kalman
http://slidepdf.com/reader/full/1-presentacion-filtro-de-kalman 2/12
Contenido
2
• Estimadores de Estado.
• Estimadores de Estado – Propagación en el Tiempo.
•Mínimos Cuadrados – Filtro de Kalman.
•Filtro de Kalman
•Modelo de la Planta.
•Condiciones Iniciales.
•Ecuaciones.

8/16/2019 1. Presentación Filtro de Kalman
http://slidepdf.com/reader/full/1-presentacion-filtro-de-kalman 3/12
Estimadores de estado
3
Figura 1. Tipos de estimadores de estado. (Simon, 2006).
8/16/2019 1. Presentación Filtro de Kalman
http://slidepdf.com/reader/full/1-presentacion-filtro-de-kalman 4/12
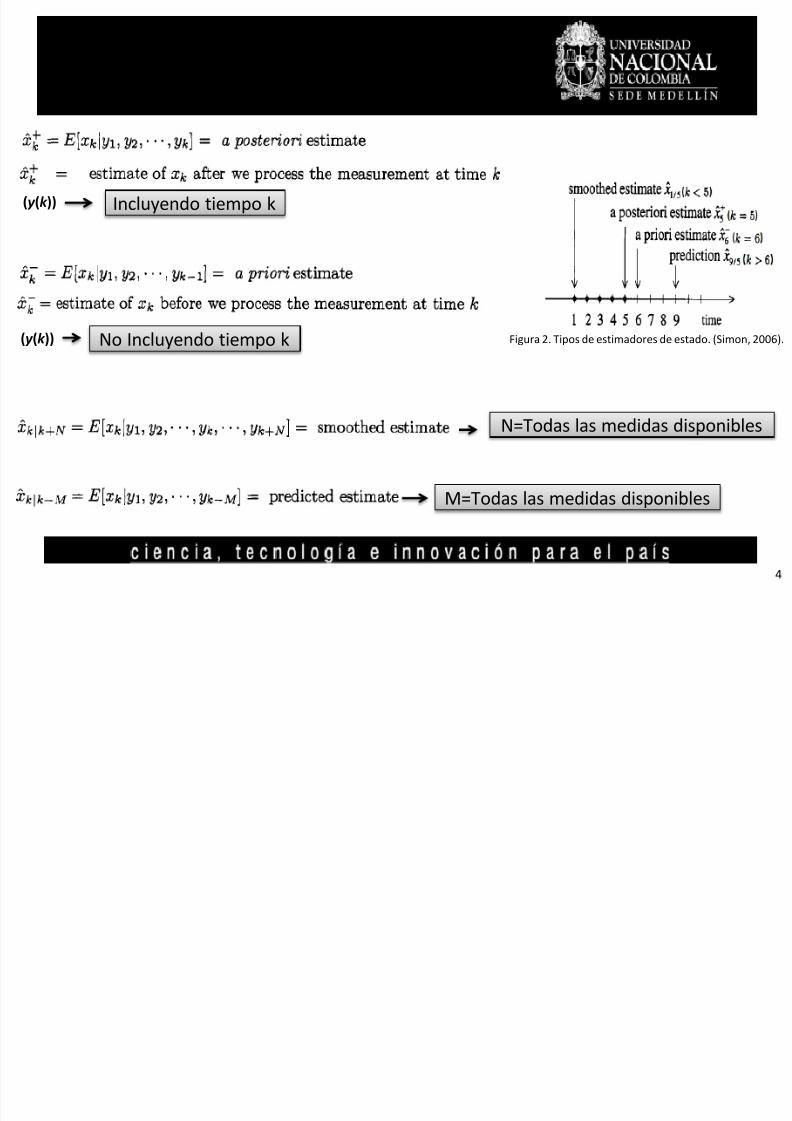
Estimadores de estado
4
No Incluyendo tiempo k
(y (k ))
(y (k ))
N=Todas las medidas disponibles
M=Todas las medidas disponibles
Incluyendo tiempo k
Figura 2. Tipos de estimadores de estado. (Simon, 2006).

8/16/2019 1. Presentación Filtro de Kalman
http://slidepdf.com/reader/full/1-presentacion-filtro-de-kalman 5/12
Estimadores de estado
Propagación en el tiempo
5
Figura 3. Linea de tiempo de estimación a priori y posteriori. (Simon, 2006).
Ecuación de actualización de Tiempo para x^.
Ecuación de actualización de Tiempo para P.

8/16/2019 1. Presentación Filtro de Kalman
http://slidepdf.com/reader/full/1-presentacion-filtro-de-kalman 6/12
Mínimos cuadrados
Filtro de Kalman
6
Figura 4. Relaciones de estimación y covarianza de mínimos cuadrados y filtro de kalman. (Simon, 2006)

8/16/2019 1. Presentación Filtro de Kalman
http://slidepdf.com/reader/full/1-presentacion-filtro-de-kalman 7/12
Filtro de Kalman de Tiempo Discreto
1. Modelo de la Planta
7
Ruido asociado al modelo
Ruido asociado a la medida
Sistemalineal
discreto
Modelo Lineal de la planta
Salida
Ruido Blanco de media
cero y no relacionados
Matrices conocidas
de covarianza
Esperanza de wk dado w j
Esperanza de vk dado v j
Esperanza de vk dado w j no relacionados

8/16/2019 1. Presentación Filtro de Kalman
http://slidepdf.com/reader/full/1-presentacion-filtro-de-kalman 8/12
Filtro de Kalman de Tiempo Discreto
2. Condiciones Iniciales
8
Si se conoce el estado inicial perfectamente, entonces P+0 = 0, sin embargo si no se
tiene nada de conocimiento acerca del valor de x0,
entonces P+
0= Infinito *(I). P+
0
representa la incertidumbre de nuestro valor inicial.
Una vez se conoce x0 y P+0 se puede calcular x-
1 y P-1

8/16/2019 1. Presentación Filtro de Kalman
http://slidepdf.com/reader/full/1-presentacion-filtro-de-kalman 9/12
Filtro de Kalman de Tiempo Discreto
3. Ecuaciones
9

8/16/2019 1. Presentación Filtro de Kalman
http://slidepdf.com/reader/full/1-presentacion-filtro-de-kalman 10/1210
(-)
(+)
Filtro de Kalman de Tiempo Discreto
Figura 5. Filtro de Kalman. Figura suministrada por el profesor Héctor A. Botero.

8/16/2019 1. Presentación Filtro de Kalman
http://slidepdf.com/reader/full/1-presentacion-filtro-de-kalman 11/12
Bibliografía
11
BSimon, D. (2006). Optimal State Estimation. (W. John, Ed.) (p.
562). New Jersey: Wiley-Interscience.
ibliografía

8/16/2019 1. Presentación Filtro de Kalman
http://slidepdf.com/reader/full/1-presentacion-filtro-de-kalman 12/12
GRACIAS
Esteban Franco Montoya
Esteban López de Mesa Aguilar
Materia: Estimación No Linea de Estado
Profesor: Héctor Antonio Botero Castro
12