visión artificial y nuevas tecnologías: aplicaciones de ... · • predicción de posición...
TRANSCRIPT
1 1
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Visión Artificial y Nuevas Tecnologías:
Aplicaciones de Seguridad Vial
http://frav.escet.urjc.es
Licesio J. Rodríguez-Aragón
2 2
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Contenidos:
• Visión Artificial y Seguridad Vial.
• Aplicación para detectar Conflictos Peatón-Vehículo.
• Aplicación, semáforo con un ciclo variable controlado por un sistema de Visión.
3 3
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Visión Artificial y Seguridad Vial
• Las cámaras de video se han hecho presentes en nuestra vida cotidiana de forma natural.
• La grabación de video se ha convertido en un medio económico de adquirir gran cantidad de información.
4 4
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Visión Artificial y Seguridad Vial
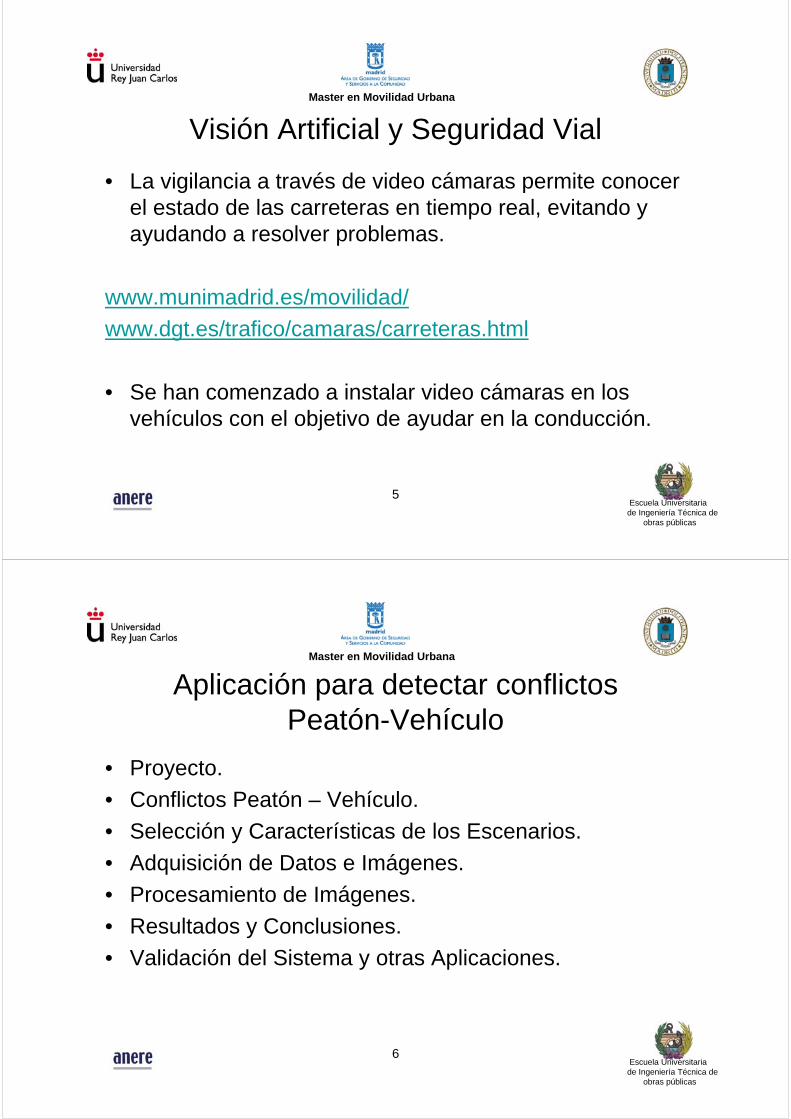
• Normalmente la presencia de una videocámara no evita la necesidad de una persona visionando imágenes y tomando decisiones.
• Las condiciones ambientales afectan en un altísimo grado el funcionamiento de estos sistemas (niebla, lluvia, día-noche).
5 5
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Visión Artificial y Seguridad Vial
• La vigilancia a través de video cámaras permite conocer el estado de las carreteras en tiempo real, evitando y ayudando a resolver problemas.
www.munimadrid.es/movilidad/
www.dgt.es/trafico/camaras/carreteras.html
• Se han comenzado a instalar video cámaras en los vehículos con el objetivo de ayudar en la conducción.
6 6
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Aplicación para detectar conflictos Peatón-Vehículo
• Proyecto.
• Conflictos Peatón – Vehículo.
• Selección y Características de los Escenarios.
• Adquisición de Datos e Imágenes.
• Procesamiento de Imágenes.
• Resultados y Conclusiones.
• Validación del Sistema y otras Aplicaciones.
7 7
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Proyecto
• Proyecto encargado por la Dirección General de Tráfico.
• Colaboradores:– FRAV, Universidad Rey Juan Carlos.
– Departamento de Psicología, Universidad de Salamanca.
• Objetivos:– Análisis Secuencial de Imágenes de Tráfico en Intersecciones y
pasos de peatones.
– Seguimiento de las trayectorias de Peatones y Vehículos.
– Categorización Automática de Conflictos.
– Predicción de Hipotéticas Colisiones.
8 8
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Conflictos Peatón - Vehículo
• El Peatón es la parte más vulnerable en cualquier accidente de tráfico.
• En 2003, 12 602 peatones se vieron implicados en Accidentes de Tráfico.
• 787 victimas mortales. 383 en accidentes en núcleos urbanos.

9 9
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
• En núcleos urbanos 4 de cada 10 victimas mortales en accidentes de tráfico son Peatones.
• En Madrid, el atropello es la primera cusa de muerte en accidente de tráfico.
• En los últimos 10 años se ha reducido un 20% la cifra de fallecidos por atropello en zona urbana.
Datos obtenidos del Estudio Accidentalidad Peatonal en Núcleos Urbanos 2005, Instituto Mapfre.
10 10
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
• ¿Cuáles son los factores que más influyen en la accidentalidad peatonal en el entorno urbano?
• Existen Elementos relacionados con el Diseño Urbano que incrementan la accidentalidad peatonal.
• Existen Conductas y Comportamientos que incrementan la accidentalidad peatonal.
¿Cómo detectarlos?
11 11
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
• El comportamiento de Peatones y Vehículos en núcleos urbanos depende de múltiples factores:– Densidad de Trafico y de Peatones.
– Características del cruce.
– Presencia de Mobiliario Urbano.
– Servicios de Transporte en las proximidades.
– Condiciones de Visibilidad.
– Señalización.
• La observación del comportamiento de Peatones y Vehículos en cruces e Intersecciones en fundamental para analizar los factores y llevar acabo las acciones correctoras pertinentes.
12 12
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
¡¡Conflicto!!
• Ch. Hyden en 1977 presenta una nueva herramienta:
The Development of a Method for Traffic SafetyEvaluation: The Swedish Traffic Conflict Technique.
Lund University of Technology.
• “Un conflicto es un evento que hubiese terminado en colisión si sus protagonistas hubiesen continuado con sus trayectorias o velocidades iniciales”.
13 13
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
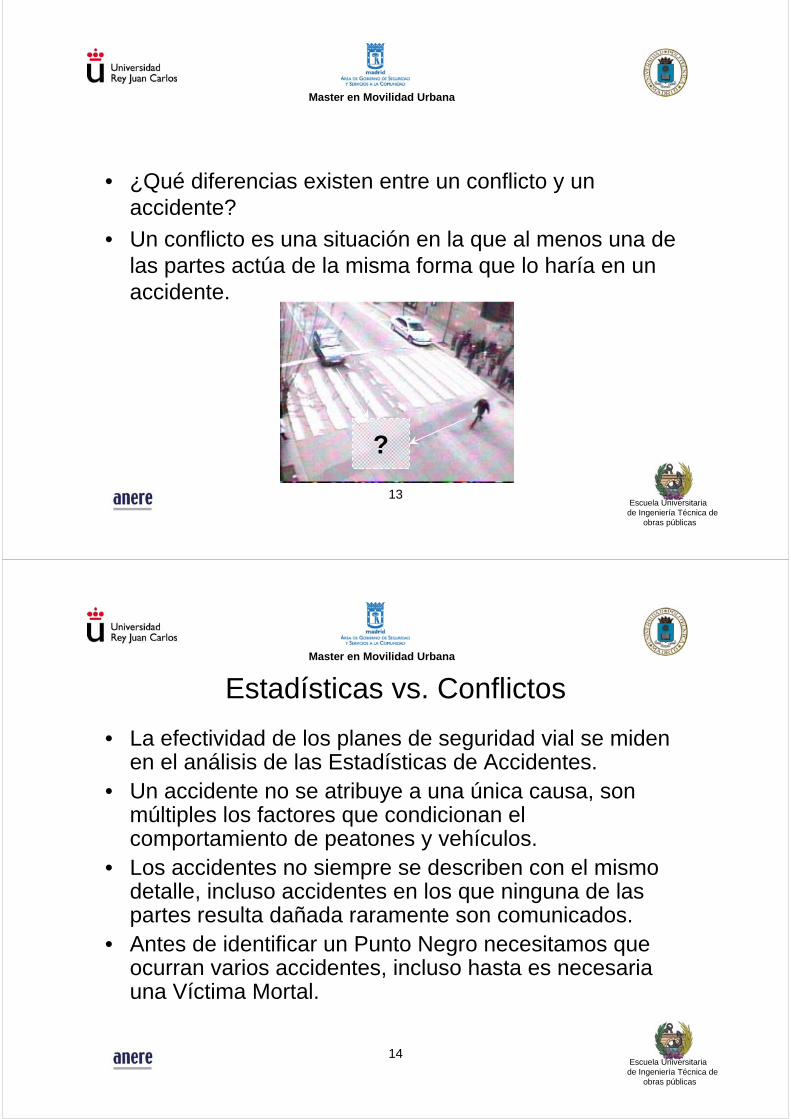
• ¿Qué diferencias existen entre un conflicto y un accidente?
• Un conflicto es una situación en la que al menos una de las partes actúa de la misma forma que lo haría en un accidente.
?
14 14
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Estadísticas vs. Conflictos
• La efectividad de los planes de seguridad vial se miden en el análisis de las Estadísticas de Accidentes.
• Un accidente no se atribuye a una única causa, son múltiples los factores que condicionan el comportamiento de peatones y vehículos.
• Los accidentes no siempre se describen con el mismo detalle, incluso accidentes en los que ninguna de las partes resulta dañada raramente son comunicados.
• Antes de identificar un Punto Negro necesitamos que ocurran varios accidentes, incluso hasta es necesaria una Víctima Mortal.
15 15
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
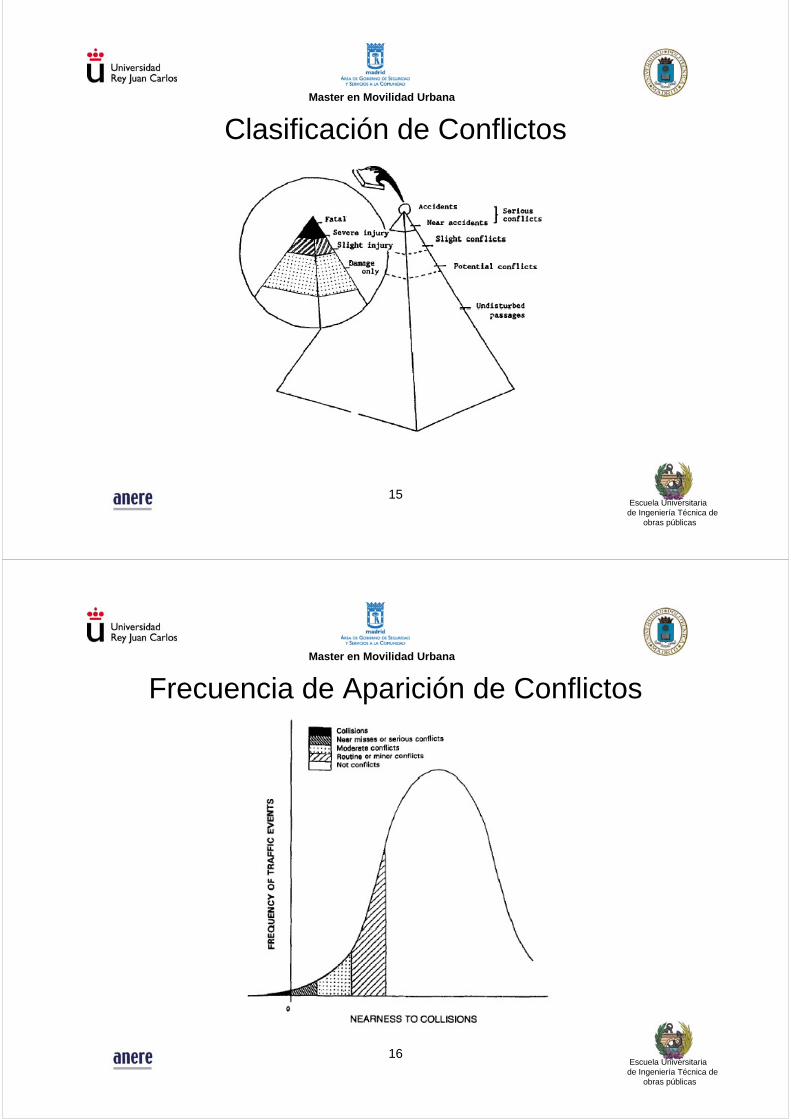
Clasificación de Conflictos
16 16
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
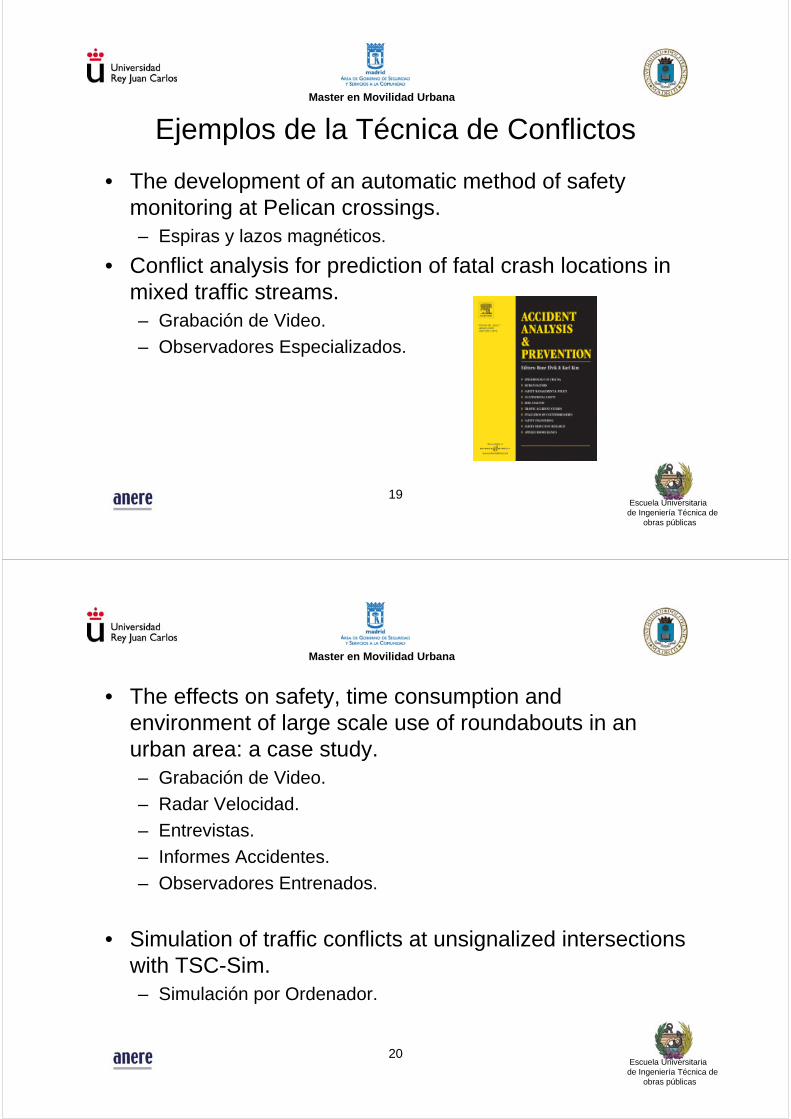
Frecuencia de Aparición de Conflictos

17 17
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Ventajas en el uso de los Conflictos
• El número de conflictos que podemos analizar por unidad de tiempo es muchísimo mayor que el número de accidentes.
• El comportamiento de las partes en un conflicto es en su origen idéntico al comportamiento en un accidente.
• En un conflicto, en la mayoría de los casos, las partes abandonan el escenario inmediatamente y sin daños.
18 18
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Inconvenientes en el uso de los Conflictos
• ¿Es la definición de conflicto consistente?
• ¿Es útil la técnica de los conflictos?
• ¿Es posible medir y cuantificar un conflicto?
19 19
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Ejemplos de la Técnica de Conflictos
• The development of an automatic method of safetymonitoring at Pelican crossings.– Espiras y lazos magnéticos.
• Conflict analysis for prediction of fatal crash locations in mixed traffic streams.– Grabación de Video.
– Observadores Especializados.
20 20
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
• The effects on safety, time consumption andenvironment of large scale use of roundabouts in anurban area: a case study.– Grabación de Video.
– Radar Velocidad.
– Entrevistas.
– Informes Accidentes.
– Observadores Entrenados.
• Simulation of traffic conflicts at unsignalized intersectionswith TSC-Sim.– Simulación por Ordenador.

21 21
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Nuestro Enfoque: Visión Artificial
• Detección Automática de Conflictos:– Peatón – Vehículo.
– Vehículo – Vehículo.
• Captura de Imágenes de Video de diferentes cruces.
• Identificación de los Objetos en la secuencia.
• Seguimiento y Trayectoria (posición, velocidad, aceleración)
• Análisis y Etiquetado de las secuencias con conflictos.
• Herramienta de apoyo al observador especializado.
22 22
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
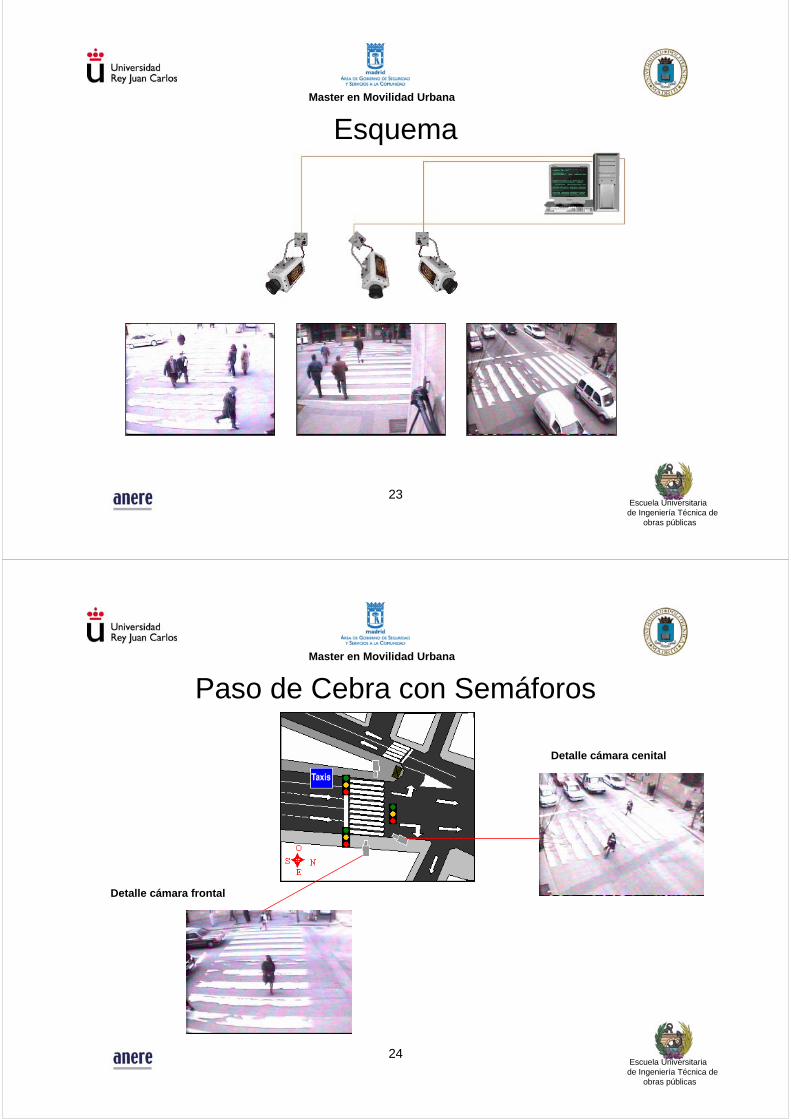
Escenarios
• Dos cruces de peatones en la ciudad de Salamanca.
• Grabaciones durante 1 mes, condiciones de día y noche.
• Tres cámaras de video y un ordenador.– Dos cámaras captando imágenes cenitales.
– Una cámara captando imágenes frontales.
• Cruces especialmente transitados.– Parada de Taxi.
– Parada de Autobús.
23 23
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Esquema
24 24
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
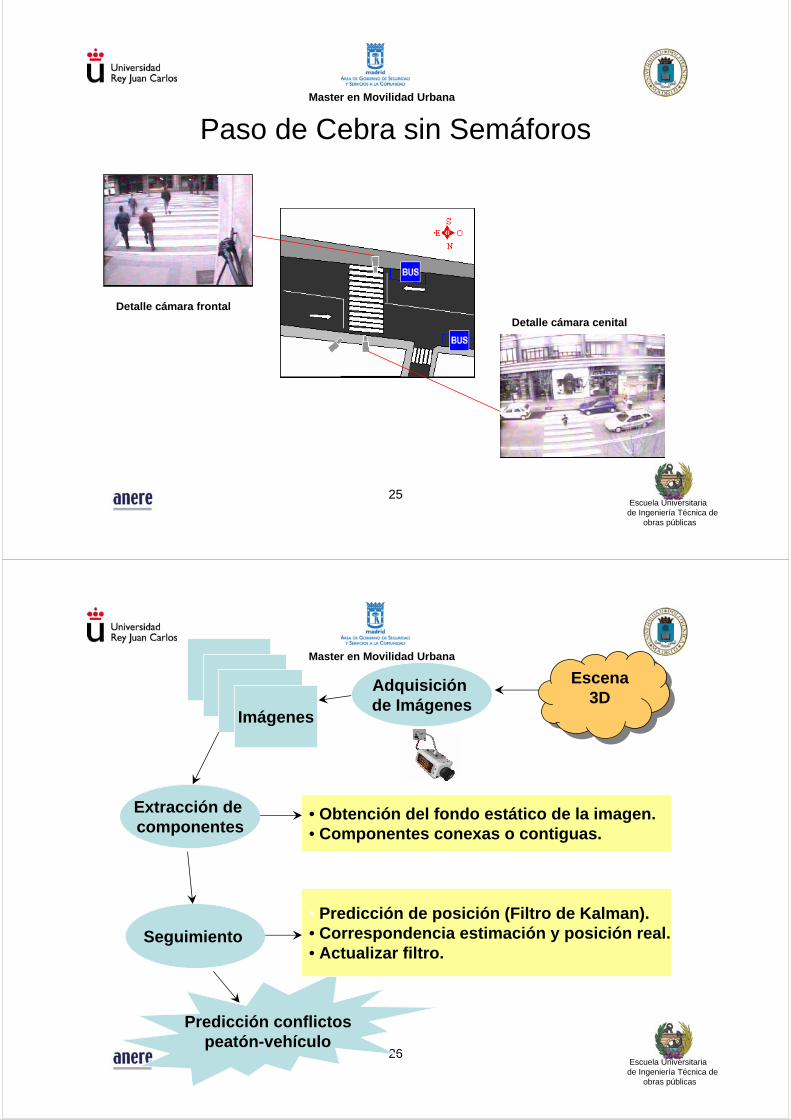
Paso de Cebra con Semáforos
Detalle cámara cenital
Detalle cámara frontal
25 25
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
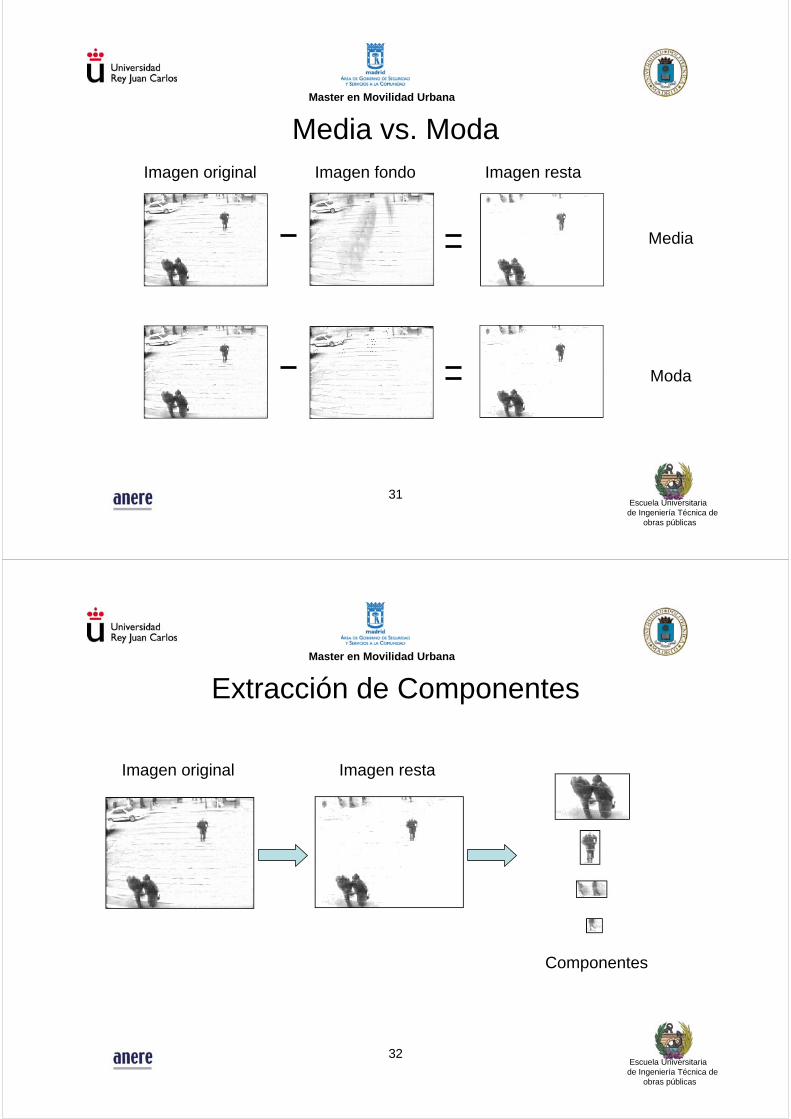
Paso de Cebra sin Semáforos
Detalle cámara cenital
Detalle cámara frontal
26 26
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
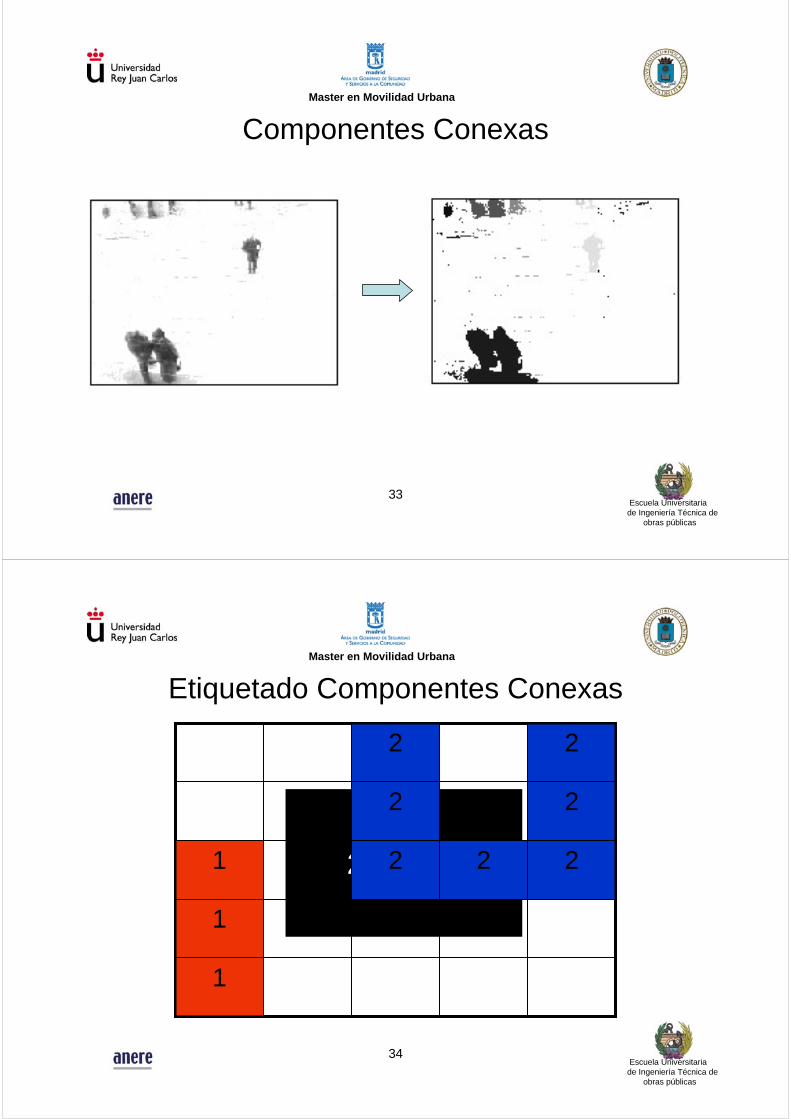
Imágenes
Extracción de componentes
Seguimiento
Predicción conflictospeatón-vehículo
• Obtención del fondo estático de la imagen.• Componentes conexas o contiguas.
• Predicción de posición (Filtro de Kalman).• Correspondencia estimación y posición real.• Actualizar filtro.
Adquisición de Imágenes
Escena 3D
Escena 3D

27 27
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Procesado de las Imágenes
• Procesado off-line de las imágenes grabadas.
• Extracción de las componentes (objetos en movimiento):– Cálculo del Fondo de la imagen.
– Etiquetado de las componentes.
• Seguimiento:– Filtro Kalman.
• Análisis de las Trayectorias y Predicción de Conflictos.
• Visualizado y Análisis de los fragmentos etiquetados como Conflictos.
28 28
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Cálculo del Fondo
Fondo 1
Fondo 2

29 29
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Resta de Fondo
Imagen original Imagen fondo
Imagen resta
30 30
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Media vs. Moda
• Media o Promedio: punto de equilibrio de las observaciones.
• Moda: Valor que más se repite, pudiendo ser único o no.
31 31
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Media vs. ModaImagen original Imagen fondo Imagen resta
Media
Moda
32 32
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Extracción de Componentes
Imagen original Imagen resta
Componentes
33 33
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Componentes Conexas
34 34
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Etiquetado Componentes Conexas
1
1
1
1
1
1
1
1
1
2
1
1
1
2
2
1
1
21
2
2
1
1
221
2
2
1
1
221
2
32
1
1
221
32
32
1
1
3221
32
32
2 3
1
1
3221
32
22
1
1
3221
22
22
1
1
2221
22
22

35 35
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Filtrado de Ruido
36 36
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Seguimiento: Una Componente
37 37
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
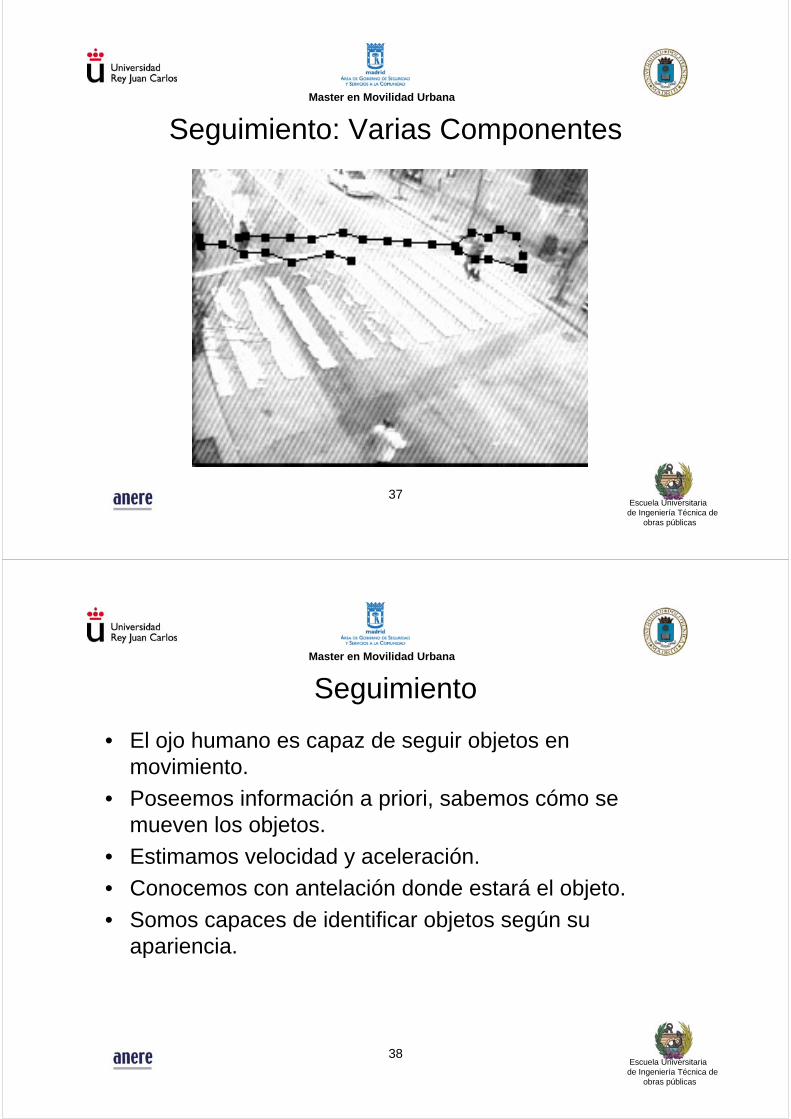
Seguimiento: Varias Componentes
38 38
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Seguimiento
• El ojo humano es capaz de seguir objetos en movimiento.
• Poseemos información a priori, sabemos cómo se mueven los objetos.
• Estimamos velocidad y aceleración.
• Conocemos con antelación donde estará el objeto.
• Somos capaces de identificar objetos según su apariencia.

39 39
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Filtro de Kalman (1960)
• Modelo iterativo destinado a realizar predicciones en series temporales.
• El modelo se adapta y corrige iterativamente según la fiabilidad de las estimaciones anteriores.
• El objetivo es predecir la posición de cada componente en la siguiente imagen capturada.
• Modelamos el movimiento de los objetos en la escena siguiendo un modelo lineal con errores normalmente distribuidos.
40 40
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Filtro Kalman
• En cada instante de tiempo y para cada componente:
(pk,vk,ak,ak-1,ak-2)
• Actualizamos el movimiento de las componentes siguiendo consideraciones físicas elementales:
pk=pk-1+ tvk-1+t2(w1ak-1+w2ak-2+w3ak-3)/2
vk=vk-1+w1ak-1+w2ak-2+w3ak-3
ak=ak-1
ak-1=ak-2
ak-2=ak-3

41 41
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Predicción
42 42
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Corrección
• Los errores entre la predicción y la realidad permiten actualizar el modelo iterativamente.
• Las trayectorias son almacenadas para su posterior análisis.
43 43
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
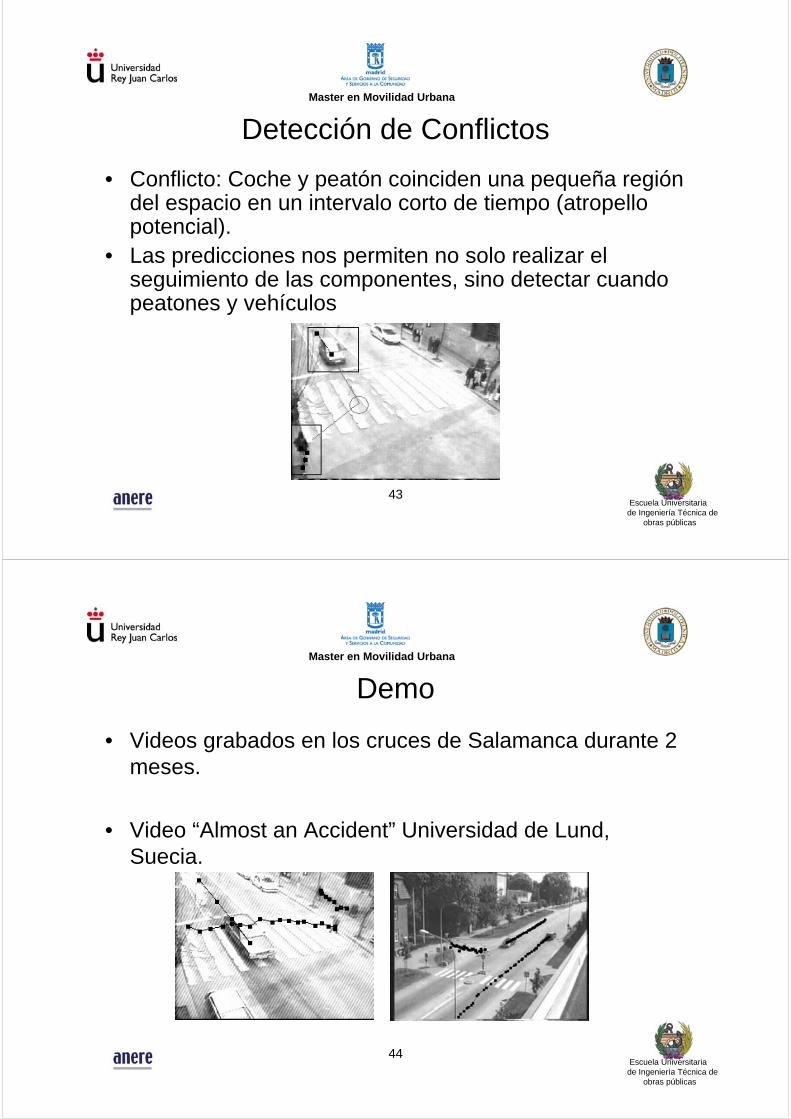
Detección de Conflictos
• Conflicto: Coche y peatón coinciden una pequeña región del espacio en un intervalo corto de tiempo (atropello potencial).
• Las predicciones nos permiten no solo realizar el seguimiento de las componentes, sino detectar cuando peatones y vehículos
44 44
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Demo
• Videos grabados en los cruces de Salamanca durante 2 meses.
• Video “Almost an Accident” Universidad de Lund, Suecia.
45 45
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
46 46
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Conclusiones
• La parada de taxis es responsable de casi la mayoría de conflictos observados.
• Cuando el primer taxi deja la parada, el escenario cambia y la configuración de la vía se ve modificada, pasando de dos a tres vías.
• Este cambio en la configuración afecta a los peatones que esperan el cambio de ciclo del semáforo.
• La parada de taxis se retrasó y se permitió aparcar en la posición ocupada por ella.

47 47
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Videos Conflictos
48 48
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Videos Conflictos

49 49
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Videos Conflictos
50 50
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Videos Conflictos

51 51
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Conclusiones
• La parada de autobús planteó numerosos conflictos al encontrarse situada junto a un paso de cebra.
• Peatones intentando cruzar por delante del autobús o vehículos intentando adelantar al autobús nos hicieron plantear el cambio de situación de la parada.
• La nueva configuración hace que los peatones crucen la calle por detrás del autobús haciéndose claramente visibles a los vehículos que se aproximan al paso de cebra.
52 52
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Videos Conflictos

53 53
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Videos Conflictos
54 54
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Videos Conflictos
55 55
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Videos Conflictos
56 56
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Almost an Accident
57 57
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Aplicación, semáforo con un ciclo variable controlado por un sistema de Visión.
• Proyecto.
• Ciclo Variable en Semáforos.
• Selección y Características de los Escenarios.
• Adquisición de Datos e Imágenes.
• Procesamiento de Imágenes.
• Resultados y Conclusiones.
• Validación del Sistema y otras Aplicaciones.
58 58
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Proyecto
• Proyecto encargado por el Real Automóvil Club.• Colaboradores:
– FRAV, Universidad Rey Juan Carlos.– RACE.
• Objetivos:– Control en tiempo real del ciclo semafórico.– Análisis de la presencia de Peatones y Vehículos en la zona de
cruce.– Adecuar el ciclo a peatones con necesidades especiales.– Optimizar la circulación de Vehículos y minimizar el tiempo de
espera.

59 59
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Cruces regulados por Semáforos
• Numerosos informes alertan de la vulnerabilidad de los peatones en zonas consideradas seguras para ellos.
• El uso de semáforos, reduce el numero de conflictos entre peatones y vehículos en los cruces e intersecciones.
60 60
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Cruces regulados por Semáforos
• Los usuarios deben obedecer las normas y aprovechar las ventajas.
• Las expectativas de los usuarios son:– El tiempo de espera, tanto para peatones como para vehículos
ha de minimizarse.
– La señal de cruce para peatones ha de permitir el cruce a todos los usuarios.
• El control dinámico de los ciclos del semáforo normalmente se orienta a aumentar la fluidez del tráfico.
• No hay un desarrollo orientado hacia la seguridad vial.
61 61
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Ciclo Variable en un Semáforo
• El ciclo del semáforo no debe interrumpirse arbitrariamente con el pretexto de minimizar el tiempo de espera.
• Una vez iniciado un ciclo, este debe continuar durante un tiempo mínimo.
• El sistema debe sugerir al concluir el ciclo actual que ciclo es más conveniente a continuación.
• En caso de duda la parte más vulnerable, el peatón, debe sentirse protegida.
62 62
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Ejemplos similares
• Pedestrian Control at Intersections.– Incluye en los pasos de cebra la detección de lo peatones y
adapta el ciclo permitiendo un cruce seguro.
• Recognizing Action at a Distance.– Utiliza técnicas relacionadas con el flujo óptico para
detectar y clasificar el movimiento.
• Detecting Pedestrians Using Patterns of Motion andAppearance– No solo usa el movimiento para detectar a los peatones, sino
que usa también la información relativa a su apariencia.
63 63
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
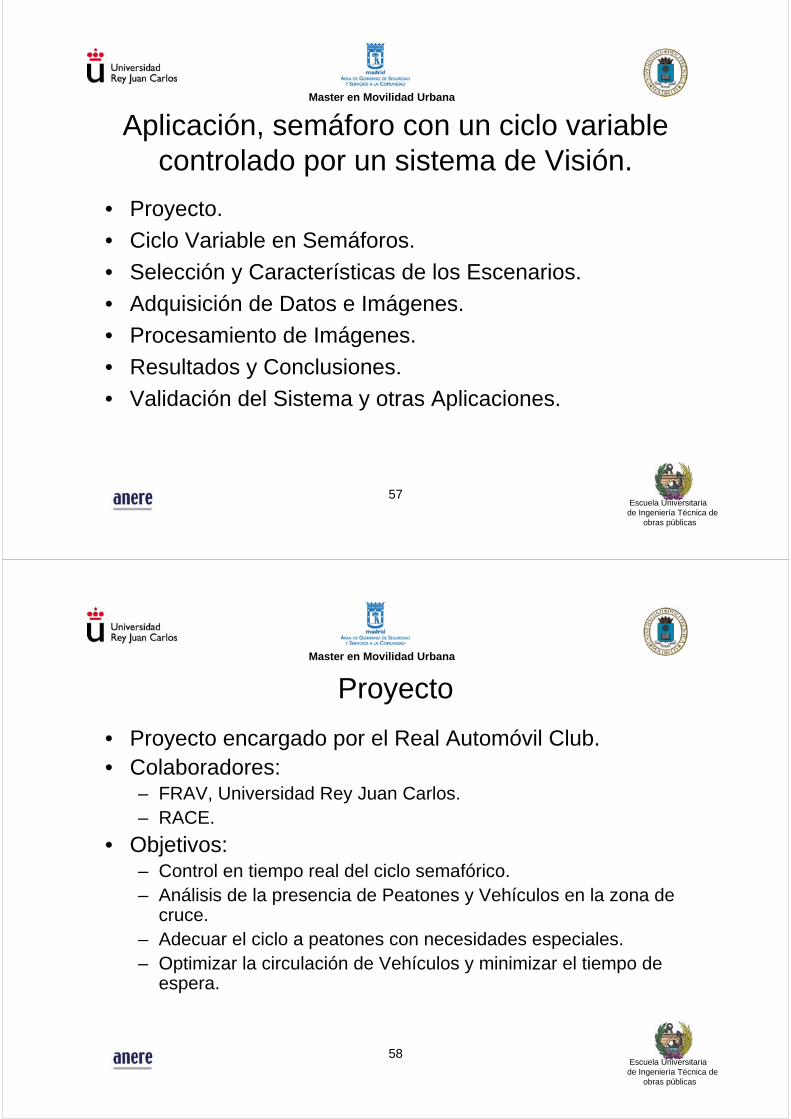
Selección y Características de Escenarios
• Un prototipo no puede probarse en condiciones reales sin antes haber pasado una certificación.
• La etapa de desarrollo se ha llevado a cabo en el circuito de seguridad vial de RACE en el circuito de el Jarama.
64 64
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
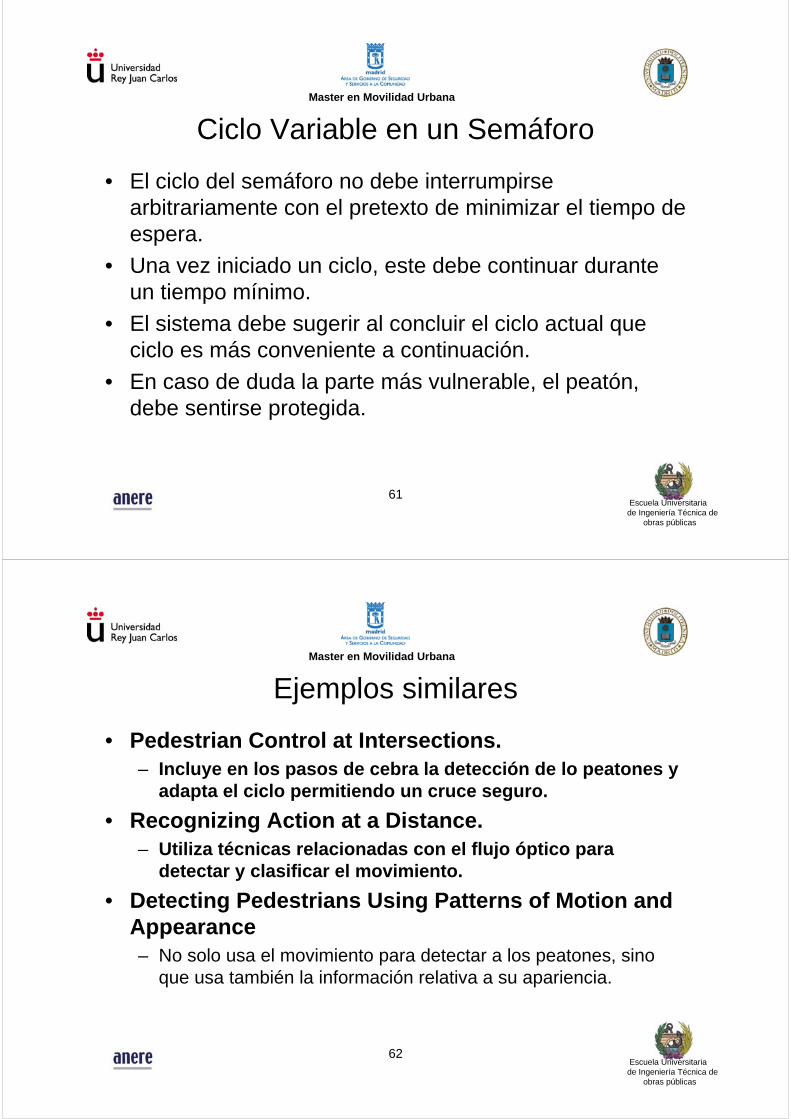
Selección y Características de Escenarios
• El circuito cuenta con los mismos elementos que podemos encontrar en los escenarios reales.
• Los vehículos han sido sustituidos por bicicletas.
65 65
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
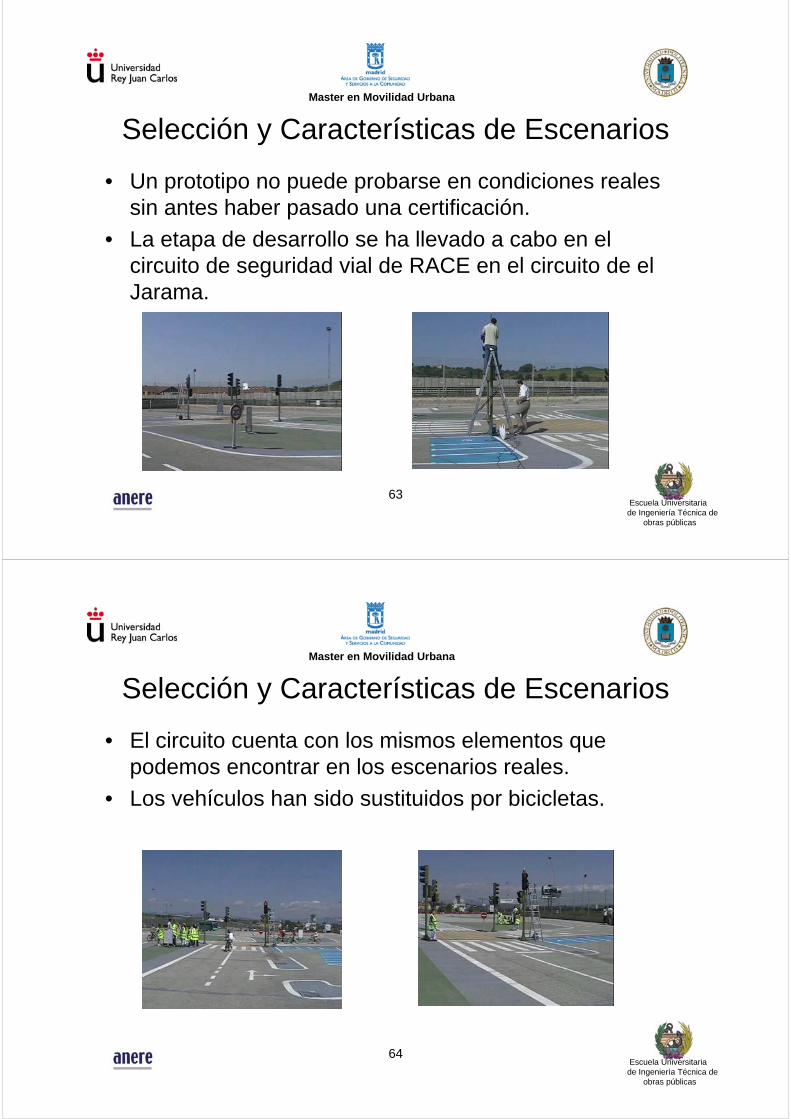
Esquema
66 66
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
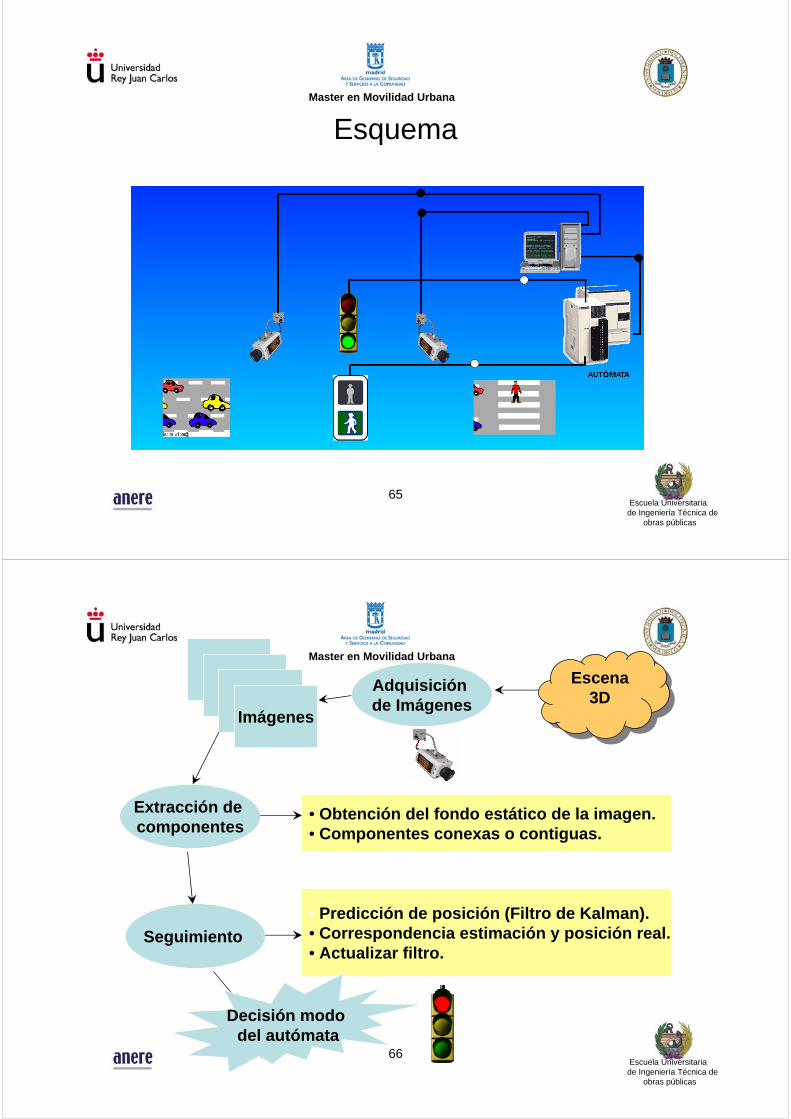
Imágenes
Extracción de componentes
Seguimiento
• Obtención del fondo estático de la imagen.• Componentes conexas o contiguas.
• Predicción de posición (Filtro de Kalman).• Correspondencia estimación y posición real.• Actualizar filtro.
Adquisición de Imágenes
Escena 3D
Escena 3D
Decisión modo del autómata
67 67
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Seguimiento de Componentes
68 68
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Autómata
• El Autómata recibe la información referente a la presencia de peatones o vehículos en las zonas de influencia y toma la decisión del modo mas correcto de funcionamiento.
RojoPeatones:
VerdeVehículos:Modo 3
VerdePeatones:
RojoVehículos:Modo 2
→ Rojo → Rojo → Verde →Peatones:
→ Verde → Amarillo → Rojo →Vehículos:Modo 1(secuencia
cíclica)
69 69
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
70 70
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas

71 71
Master en Movilidad Urbana
Escuela Universitariade Ingeniería Técnica de
obras públicas
Conclusiones
• El control de los ciclos de un semáforo mediante Visión Artificial es posible y presenta resultados muy interesantes.
• Es importante asegurar la seguridad de la parte más débil, en este caso el peatón.
• Los estándares de Seguridad Vial deben preservares para permitir una evaluación positiva del dispositivo por parte de las autoridades.
• En este caso lo que hemos presentado es un prototipo.