08 analisis espacio estado
DESCRIPTION
LectureTRANSCRIPT

7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 1/34
MAESTRÍA EN CONTROL YAUTOMATIZACIÓN
CONTROL DIGITAL AVANZADOSESIÓN 8
ANÁLISIS EN EL ESPACIO DE ESTADO
Ing. Ismael Minchala Avila, MSc
7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 2/34
AGENDA
• Introducción
• Representación en el Espacio de Estado de
Sistemas en Tiempo Discreto
• Solución de las Ecuaciones de Estado enTiempo Discreto
• Matriz de Función de Transferencia Pulso
2

7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 3/34
INTRODUCCIÓN(1)
• Los métodos convencionales son conceptualmente sencillos y nadamás requieren de un número razonable de cálculos, pero sólo son
aplicables a sistemas lineales invariantes en el tiempo con una
entrada y una salida.
•
Se basan en la relación entrada- salida del sistema, es decir, en lafunción de transferencia o la función de transferencia pulso.
• Con cep to del método en el espac io de es tado . Se basa en la
descripción del sistema en términos de n ecuaciones en diferencias
o diferenciales de primer orden, que pueden combinarse en una
ecuación matricial en diferencias o diferencial de primer orden.
• El diseño en el espacio de estado se puede realizar para toda una
clase de entradas.
3
7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 4/34
INTRODUCCIÓN(2)
• Estado. Es el conjunto más pequeño de variables, tales que elconocimiento de dichas variables en t = t 0, junto con el conocimiento
de la entrada para t t 0 determinan por completo el comportamiento
del sistema para cualquier tiempo t t 0.
•
Variables de Estado. Conforman el conjunto más pequeño devariables que determinan el estado del sistema dinámico. No
requieren ser cantidades físicamente medibles u observables.
• Vector de Estado. Las n variables de estado que describen el
sistema forman un vector x.
• Espacio de estado. El espacio de n dimensiones cuyos ejes
coordenados están formados por el eje x1, eje x2 , ... , eje xn se
conoce como espacio de estado.
4
7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 5/34
INTRODUCCIÓN(3)
• Ecuaciones en el espacio de estado.
• x(k) = vector n (vector de estado)
• y(k) = vector m (vector de salida)
• u(k) = vector r (vector de entrada)
• G(k) = matriz n × n (matriz de estado)
• H(k) = matriz n × r (matriz de entrada)
• C(k) = matriz m × n (matriz de salida)
• D(k) = matriz m × r (matriz de transmisión directa)
5
k k k k k
k k k k k
uDxCy
uHxGx
1
7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 6/34
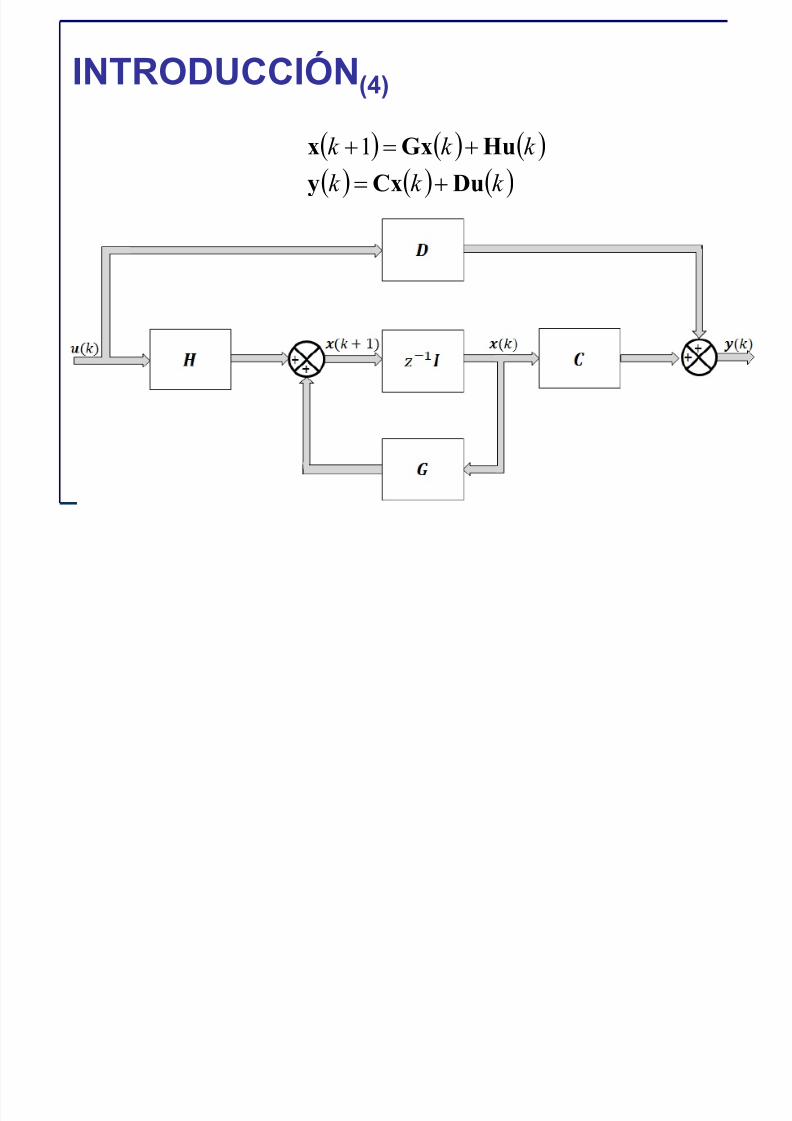
INTRODUCCIÓN(4)
k k k
k k k
DuCxy
HuGxx
1

7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 7/34
REPRESENTACIÓN EN EL ESPACIO DEESTADO DE SISTEMAS DISCRETOS(1)
• Considerando el modelo de un sistema discreto descritopor su ecuación en diferencias:
• Podemos representar su función de transferencia pulso:
8
nk nk k nk nk k k ububub ya ya ya y ......1102211
n
nn
n
nn
nn
n
n
a z a z
b z b z b
z U
z Y
z a z a
z b z bb
z U
z Y
...
...
...1
...
1
1
1
10
11
1
10

7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 8/34
REPRESENTACIÓN EN EL ESPACIO DEESTADO DE SISTEMAS DISCRETOS(2) • Método de Programación Directa
9
nnnn
n
nn
nn
nn
nn
abb sabb sabb
ab sab sab sb
b sb sb sb
0101
1
101
010
1
100
1
1
10
...
...
...
0
1
1
1 ...
b
a sa sa s nn
nn
nn
nn
nnnn
nn
a sa sa s
abb sabb sabb sabbb
sU
sY
1
1
1
0101
2
202
1
101
0
...
...
uqaqaqaqaq
a sa sa s
sU sQ
nn
nnn
nn
nn
1
2
2
1
1
1
1
1
...
...

7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 9/34
REPRESENTACIÓN EN EL ESPACIO DEESTADO DE SISTEMAS DISCRETOS(3) • Forma canónica controlable
• Definiendo:
10
u xa xa xa xa xq x
x xq x
x xq x
x xq x
nnnn
n
n
1122111
1
433
322
211
...
qabbqabbqabbqbbt ubt y nnnn
nn
0101
2
202
1
010 ...

7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 10/34
REPRESENTACIÓN EN EL ESPACIO DEESTADO DE SISTEMAS DISCRETOS(4) • Forma canónica controlable
11
k ub
k x
k x
k x
k x
babbabbabk y
k u
k x
k x
k x
k x
aaaak x
k x
k x
k x
n
n
nnnn
n
n
nnn
n
n
0
1
2
1
0110110
1
2
1
121
1
2
1
1
0
0
0
0100
0010
1
1
1
1

7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 11/34
REPRESENTACIÓN EN EL ESPACIO DEESTADO DE SISTEMAS DISCRETOS(5) • Forma canónica observable
12
k ub
k x
k x
k x
k x
k y
k u
bab
bab
bab
bab
k x
k x
k x
k x
a
a
a
a
k x
k x
k x
k x
n
n
nn
nn
n
n
n
n
n
n
0
1
2
1
011
022
011
0
1
2
1
1
2
1
1
2
1
1000
1000
0100
0001
0000
1
1
1
1
7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 12/34
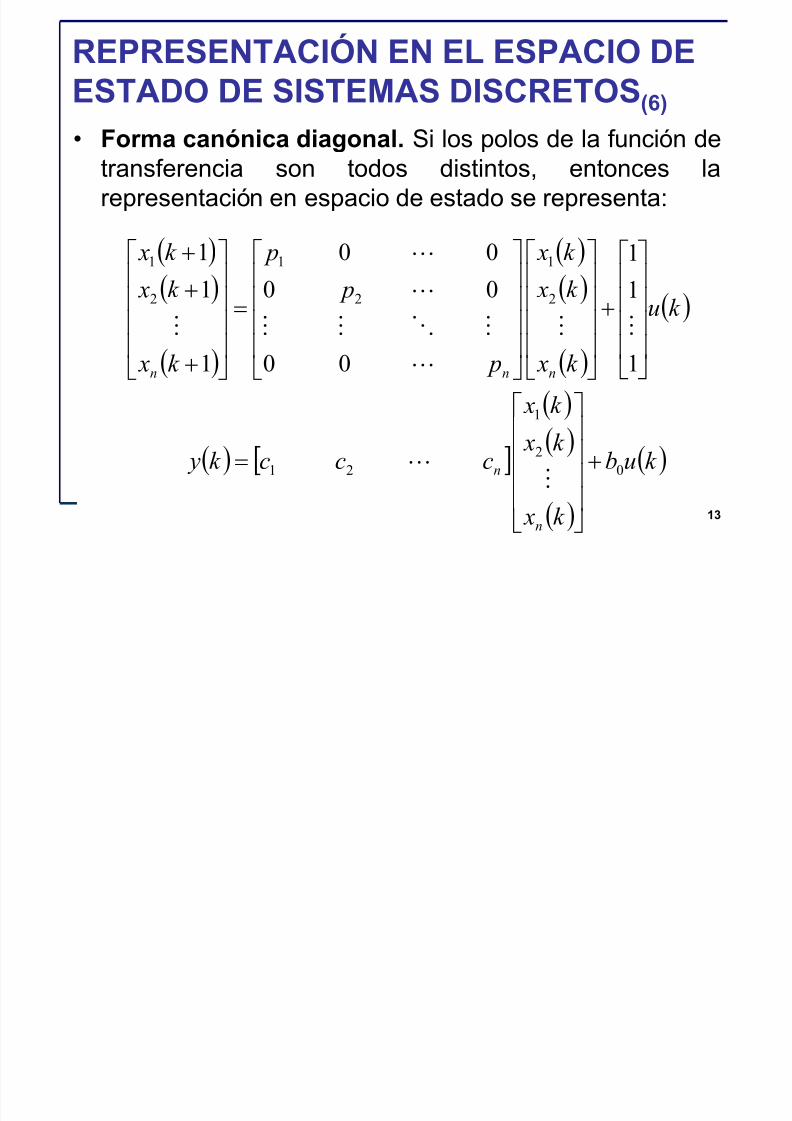
REPRESENTACIÓN EN EL ESPACIO DEESTADO DE SISTEMAS DISCRETOS(6) • Forma canónica diagonal. Si los polos de la función de
transferencia son todos distintos, entonces la
representación en espacio de estado se representa:
13
k ub
k x
k x
k x
ccck y
k u
k x
k xk x
p
p p
k x
k xk x
n
n
nnn
0
2
1
21
2
1
2
1
2
1
1
11
00
0000
1
11
7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 13/34
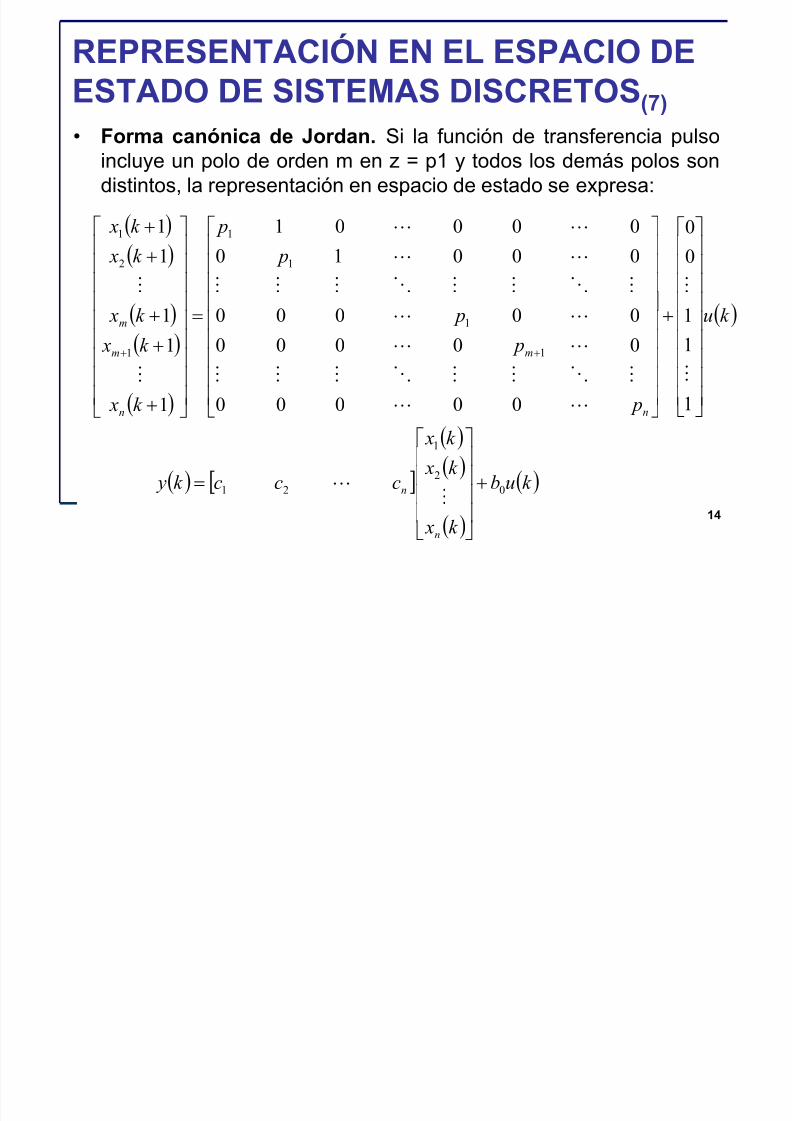
REPRESENTACIÓN EN EL ESPACIO DEESTADO DE SISTEMAS DISCRETOS(7) • Forma canónica de Jordan. Si la función de transferencia pulso
incluye un polo de orden m en z = p1 y todos los demás polos son
distintos, la representación en espacio de estado se expresa:
14
k ub
k x
k x
k x
ccck y
k u
p
p
p
p
p
k x
k x
k x
k x
k x
n
n
n
m
n
m
m
0
2
1
21
1
1
1
1
1
2
1
1
1
1
0
0
00000
00000
00000
00010
00001
1
1
1
1
1

7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 14/34
EJEMPLO
• Considere el sistema siguiente:
• Representarlo en las formas canónicas controlable,
observable y diagonal.
15
4.03.1
1
2
z z
z
z U
z Y
7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 15/34
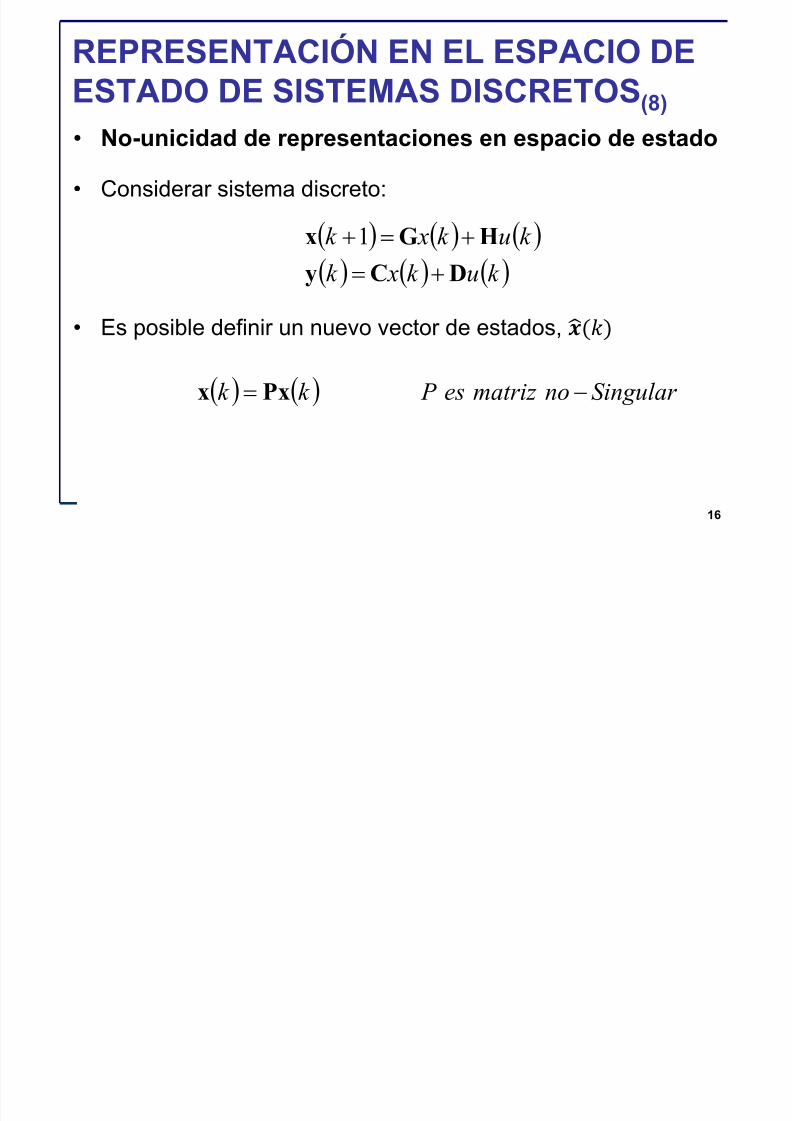
REPRESENTACIÓN EN EL ESPACIO DEESTADO DE SISTEMAS DISCRETOS(8) • No-unicidad de representaciones en espacio de estado
• Considerar sistema discreto:
• Es posible definir un nuevo vector de estados, ()
16
k uk xk
k uk xk
DCy
HGx
1
Singular nomatriz es P k k xPx ˆ

7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 16/34
REPRESENTACIÓN EN EL ESPACIO DEESTADO DE SISTEMAS DISCRETOS(9) • Transformación del sistema:
17
k k k
k k k
DuxCPy
HuxGPxP
ˆ
ˆ1ˆ
DDPCC
HPHGPPG
HuPxGPPx
11
11
ˆˆ
ˆˆ
ˆ1ˆ k k k
k k k
k k k
uDxCy
HxGx
ˆˆˆ
ˆˆˆ1ˆ

7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 17/34
SOLUCIÓN DE LAS ECUACIONES DEESTADO EN TIEMPO DISCRETO(1)
18
k k k
k k k
DuCxy
HuGxx
1
2100223
100112
001
23
2
HuGHuHuGxGHuGxx
HuGHuxGHuGxxHuGxx
k jk
j
k
j
jk k
k
j
jk
DuHuGCxCGy
HuGxGk x k
1
0
1
1
0
1
0
0

7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 18/34
SOLUCIÓN DE LAS ECUACIONES DEESTADO EN TIEMPO DISCRETO(2) • Matriz de transición de estado.
– Es posible escribir la solución de la ecuación de estado
homogénea.
– donde (k) es una matriz única de n × n que satisface la
condición
– (k) se llama matriz de transición de estado. También se conoce
como matriz fundamental.19
k k Gxx 1
0xΨx k k
IΨ
GΨΨ
01
k k
k k GΨ
7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 19/34
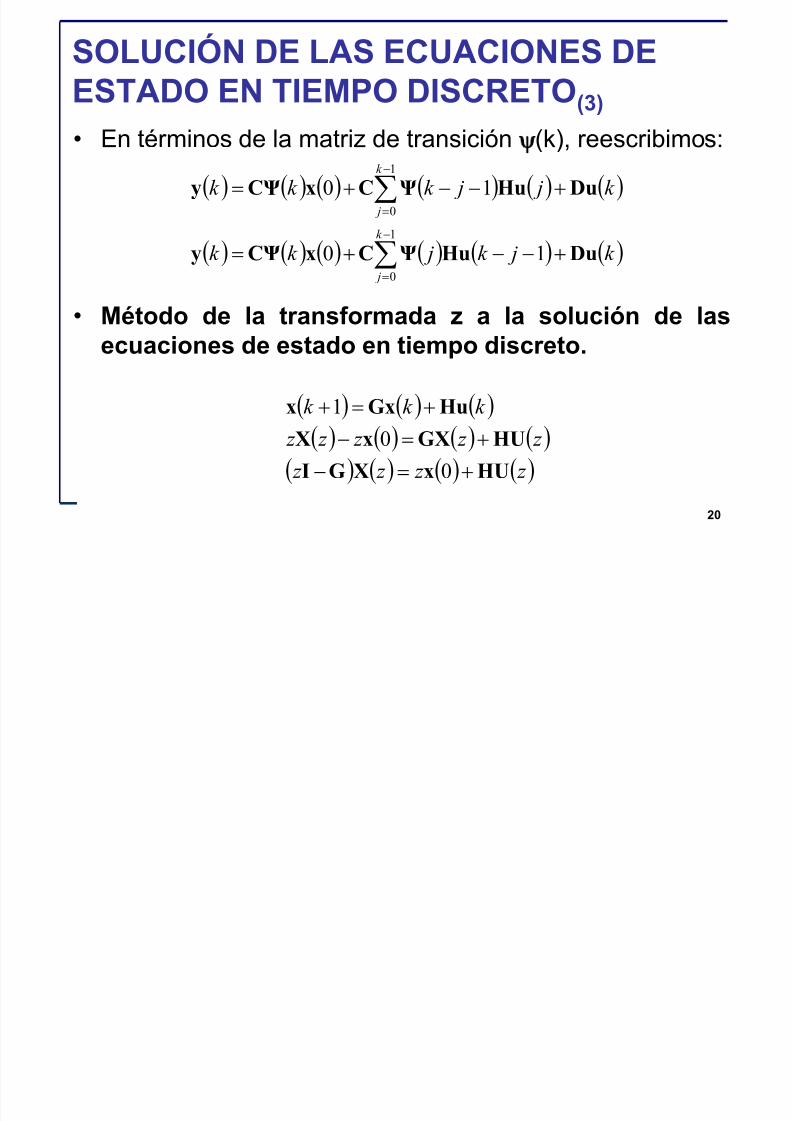
SOLUCIÓN DE LAS ECUACIONES DEESTADO EN TIEMPO DISCRETO(3) • En términos de la matriz de transición (k), reescribimos:
• Método de la transformada z a la solución de lasecuaciones de estado en tiempo discreto.
20
1
0
1
0
10
10
k
j
k
j
k jk jk k
k j jk k k
DuHuΨ
CxCΨ
y
DuHuΨCxCΨy
z z z z
z z z z z
k k k
HUxXGI
HUGXxX
HuGxx
0
0
1

7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 20/34
SOLUCIÓN DE LAS ECUACIONES DEESTADO EN TIEMPO DISCRETO(4)
21
z z Z z z Z k x
z z z z z
HUGIxGI
HUGIxGIX
1111
11
0
0
z z Z j
z z Z
k
j
jk
k
HUGIHuG
GIG
11
1
0
1
11

7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 21/34
EJEMPLO(1)
• Obtenga la matriz de transición de estado del siguiente sistema entiempo discreto:
• Donde
• Posteriormente obtenga el estado x(k) y la salida y(k) cuando laentrada u(k) =1. Suponga que el estado inicial está dado por:
22
k k y
k uk k
Cx
HGxx
1
011
1
116.0
10
CHG
1
1
0
00
2
1
x
xx

7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 22/34
MATRIZ DE TRANSFERENCIA PULSO(1)
• Un sistema en tiempo discreto de una entrada y una salida sepuede representar o modelar mediante una función de transferencia
pulso.
• La extensión del concepto de la función de transferencia pulso a un
sistema en tiempo discreto de varias entradas y varias salidas da lamatriz de función de transferencia pul so.
23
k k y
k uk k
Cx
HGxx
1
z z z
z z z z z
DUCXY
HUGXxX
0

7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 23/34
MATRIZ DE TRANSFERENCIA PULSO(2)
• F(z) se conoce como matriz de función de transferencia pulso. Se
trata de una matriz de m × r . La matriz de función de transferencia
pulso F(z) caracteriza la dinámica de entrada/salida del sistema de
tiempo discreto dado.
• Los polos de F(z) y en consecuencia la ecuación característica del
sistema está dada por:
24
z z z z z
z z z
UFUDHGICY
HUGIX
1
1
DHGICF
1
z z
01
GI z

7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 24/34
DISCRETIZACIÓN DE LAS ECUACIONESEN E.E. EN TIEMPO CONTINUO(1)
• Solución de las ecuaciones de estado en tiempo continuo.
• La matriz e At posee la propiedad:
25
0
22
!...
!
1...
!2
1
k
k k k k t
k
t t
k t t e
AAAAIA
AAAAAI
AAA
AIA
AAAAA
AA
AA
A
t
k k
t
t k k
t
k
k k
k k t
ek
t t t edt d
ek
t t t e
dt
d
k t t
k t t e
dt d
...!1
...!2
...!1
...!2
!...
!1
1...
!2
1
1122
1122
0
1332
st st
eee
AAA
7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 25/34
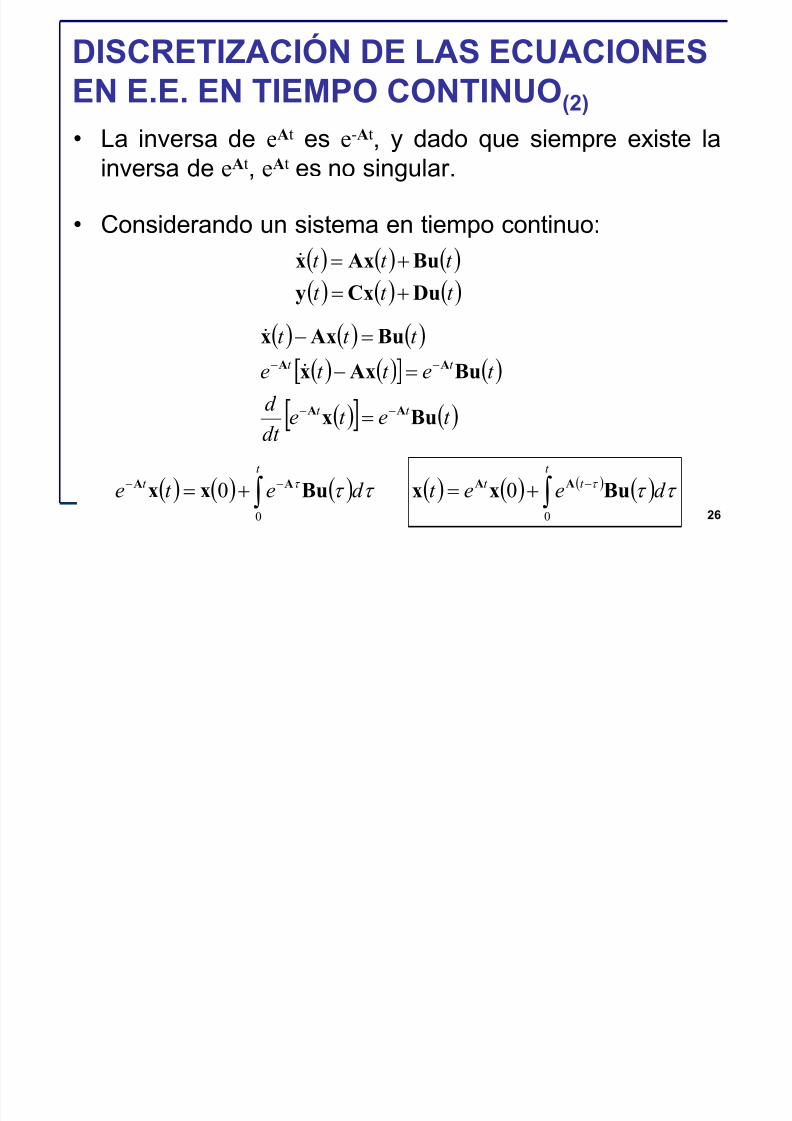
DISCRETIZACIÓN DE LAS ECUACIONESEN E.E. EN TIEMPO CONTINUO(2) • La inversa de eAt es e-At, y dado que siempre existe la
inversa de eAt, eAt es no singular.
• Considerando un sistema en tiempo continuo:
26
t t t
t t t DuCxyBuAxx
t et edt
d
t et t e
t t t
t t
t t
Bux
BuAxx
BuAxx
AA
AA
t
t d et e
0
0 Buxx AA
t
t t d eet
0
0 Buxx
AA
7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 26/34
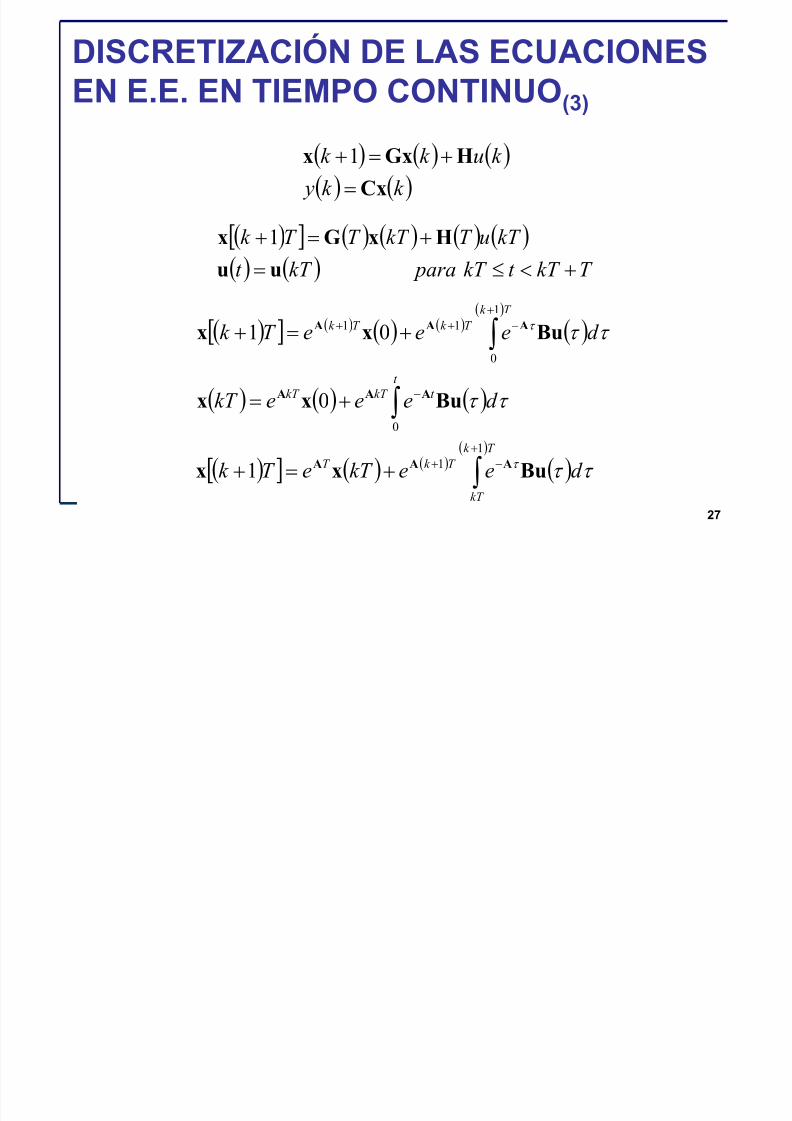
DISCRETIZACIÓN DE LAS ECUACIONESEN E.E. EN TIEMPO CONTINUO(3)
27
k k y
k uk k
Cx
HGxx
1
T kT t kT parakT t
kT uT kT T T k
uu
HxGx 1
t
t kT kT
T k
T k T k
d eeekT
d eeeT k
0
1
0
11
0
01
Buxx
Buxx
AAA
AAA
T k
kT
T k T d eekT eT k
1
11
Buxx AAA
7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 27/34
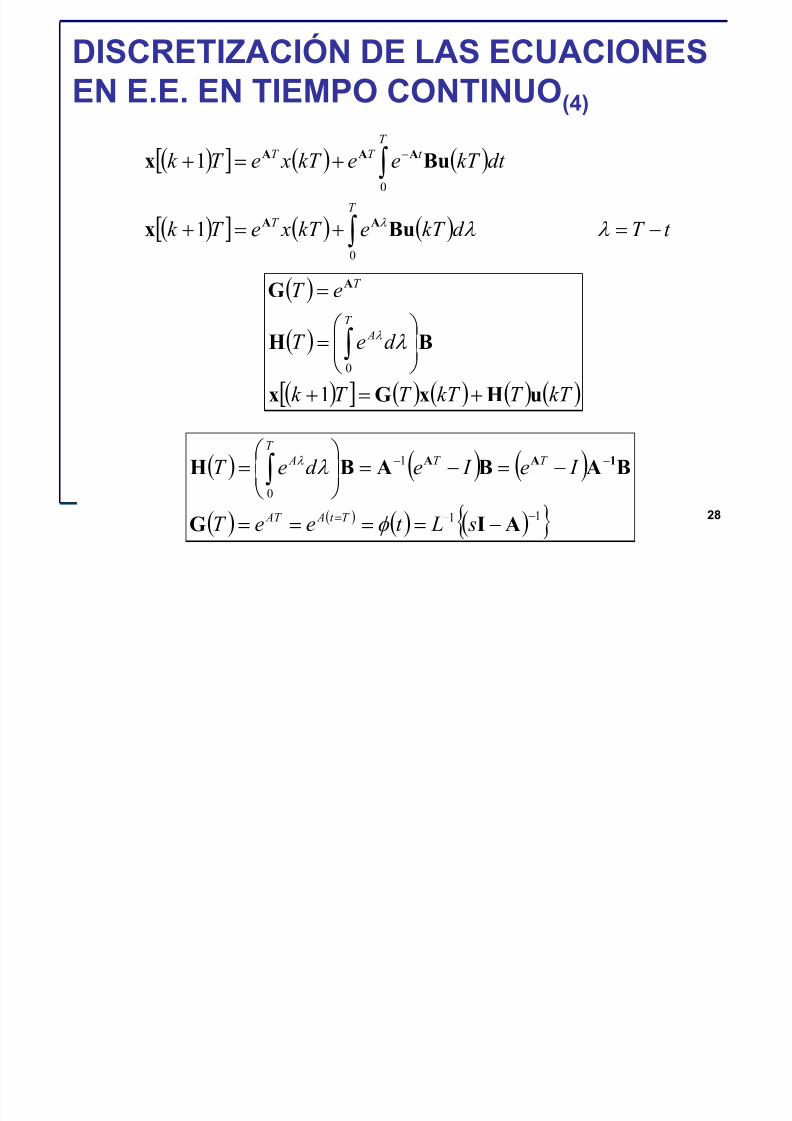
DISCRETIZACIÓN DE LAS ECUACIONESEN E.E. EN TIEMPO CONTINUO(4)
28
t T d kT ekT xeT k
dt kT eekT xeT k
T
T
T
t T T
0
0
1
1
Bux
Bux
AA
AAA
kT T kT T T k
d eT
eT
T
A
T
uHxGx
BH
G A
1
0
11
1
0
AIG
BABABH 1AA
s Lt eeT
I e I ed eT
T t A AT
T T
T
A

7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 28/34
EJEMPLO(1)
• Discretizar a partir de la forma canónica controlable:
s s
kA
s s
kA
s s
kA
x X
sY sG
211
t kAt y
t ut t
x
xx
0/
1
0
/10
10
s
s
s s
L s
s
L s LT
T eT T
0
11
1
11
0
11
1
111
AIΦ
ΦG A

7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 29/34
EJEMPLO(2)
30
1
10
1
1
1
10
1
11
11
s
s s s
L
s
s s s
LT Φ
T t
t
t
e
eT
0
1Φ
T t
T
T
e
eT
0
1G
7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 30/34
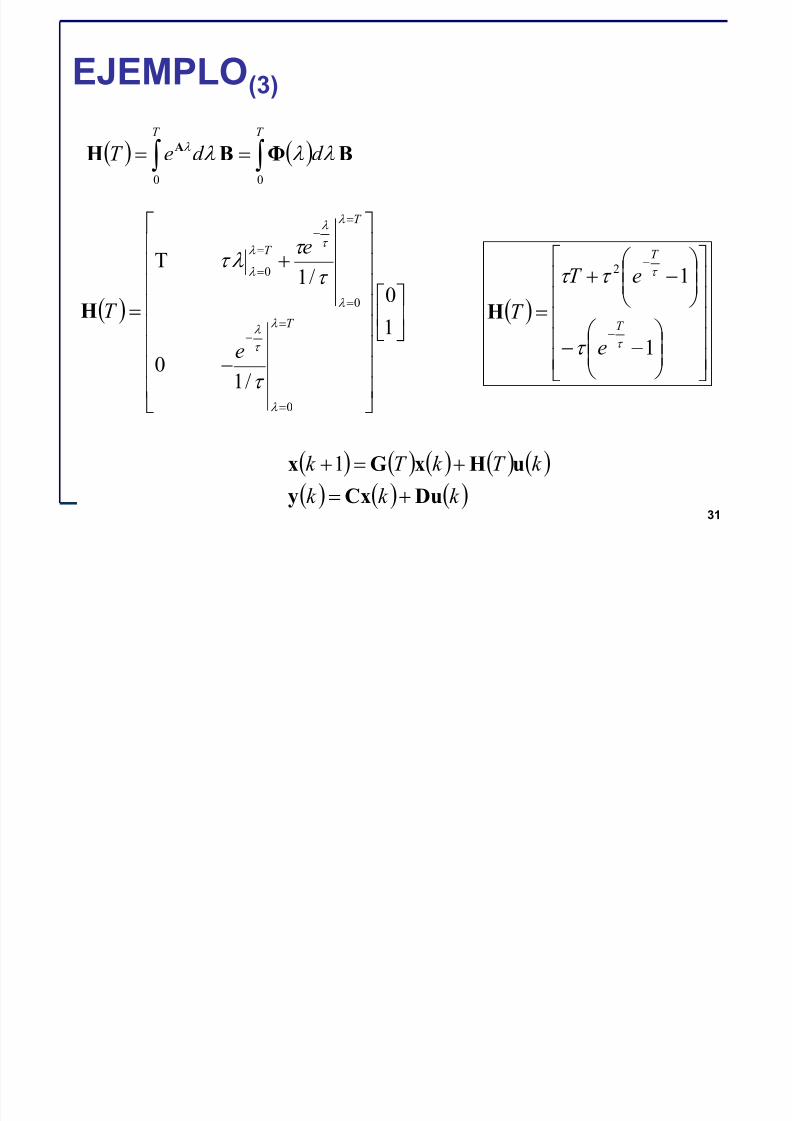
EJEMPLO(3)
31
BΦBH A
T T
d d eT 00
1
0
/0
/1
0
0
0
T
T
T
e
e
T
H
1
12
T
T
e
eT
T H
k k k
k T k T k
DuCxy
uHxGx
1

7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 31/34
TAREA 06
• Obtenga la representación en espacio de estado delsiguiente sistema, en la formas canónicas controlable,
observable y diagonal o de Jordan:
• Obtenga la forma canónica controlable de la
representación en espacio de estado del siguiente
sistema de control. El periodo de muestreo T es de 1segundo.
32
21
21
341
861
z z
z z
z U
z Y
7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 32/34
TAREA 06
• Obtenga la representación en espacio de estado delsiguiente sistema, en la formas canónicas controlable,
observable y diagonal o de Jordan:
• Obtenga la forma canónica controlable de la
representación en espacio de estado del siguiente
sistema de control. El periodo de muestreo T es de 1segundo.
33
21
21
341
861
z z
z z
z U
z Y

7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 33/34
TAREA 06
34
7/18/2019 08 Analisis Espacio Estado
http://slidepdf.com/reader/full/08-analisis-espacio-estado 34/34
TAREA 06
• Obtenga la matriz de transición Ψ(k) para elsiguiente sistema discreto:
• Consulte el modelo continuo de Ackerman para
el metabolismo de glucosa e insulina en un
paciente diabético.
– Obtenga la matriz de transición Ф(t)
– Discretice el modelo continuo en espacio de estado
para un tiempo de muestreo T35
k x
k x
k x
k x
2
1
2
1
124.0
10
1
1