varios problemas de cálculo numérico (teoría del mef-fem)
TRANSCRIPT

Para resolver este tipo de problemas deberemos tener en cuenta la construc-ción de un polinomio llamado de Lagrange, de grado n, nulo en todos suspuntos xk salvo en uno, que será el xj , cuyo valor será 1. Éste será el polinomiogeneral, aunque cada problema particular tendrá un grado k, de tal forma queexistirán k + 1 puntos de interpolación. El intervalo necesariamente debe estaracotado de tal forma que verifique, siendo los puntos de interpolación, todosdistintos:
{x0, x1, ..., xk} / xi �= xj
∀ζ ∈ [a, b] , (a = x0, b = xk) ∃ P (x) ≃ f(x) / |E(x)| |Emax|
dado que fuera de ese intervalo no existirá interpolación y el error absolutoE(x) para esos puntos puede incrementarse por encima de su error máximoEmax.
La interpolación de Lagrange significa matemáticamente aproximar una fun-ción f(x) en un intervalo definido por los puntos donde se va a interpolar, comoya se ha visto, de tal forma que P (x) sea aproximadamente igual a la funciónen dicho intervalo.
1

He creado un programa informático denominado Lagrange para las cal-culadoras TI 92 Plus / Voyage 200 de Texas Instruments tras estudiar laasignatura AF.3 del curso modular MEF. Voy a realizar el cálculo paso a pasocon las pantallas de este programa que es didáctico y presenta el cálculo se-cuencialmente. Vale para calcular cualquier interpolación de Lagrange paraaproximar funciones en un intervalo de puntos. Realmente el intervalo en sí lodeciden los puntos, pero aún así se ha puesto de esta forma. El no de puntospuede ser de 2 a 6.
En el intervalo de validez, podemos en lugar de establecer el intervalo en-tre corchetes, cualquier caracter/es alfanumérico/s sin los corchetes. De estaforma, el programa asumirá que el intervalo estará comprendido en el cerradocorrespondiente al punto primero más bajo y al punto último más alto, tal ycomo está en la 1a de las pantallas de presentación de arriba. Podemos elegirentre resolver el problema paso a paso o ir directo al resultado del polinomioaproximador de Lagrange. A continuación se muestra un cálculo secuencial,paso a paso.
2
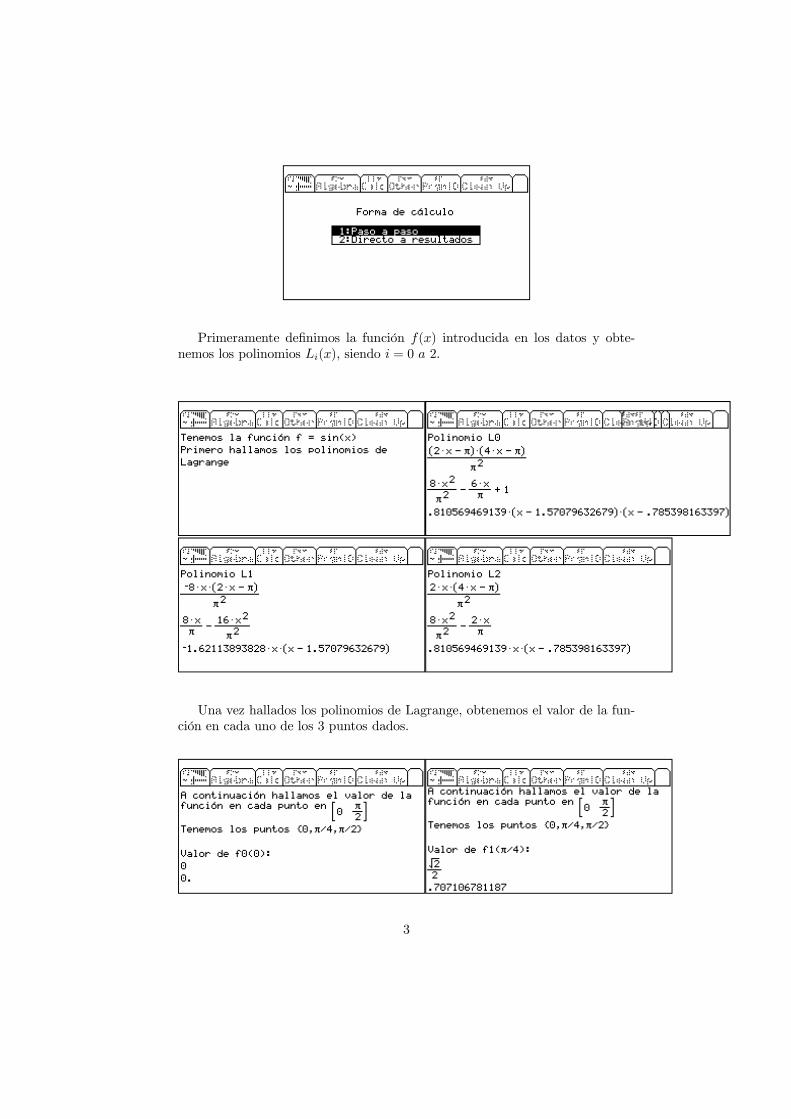
Primeramente definimos la función f(x) introducida en los datos y obte-nemos los polinomios Li(x), siendo i = 0 a 2.
Una vez hallados los polinomios de Lagrange, obtenemos el valor de la fun-ción en cada uno de los 3 puntos dados.
3

Como se sabe el polinomio de Lagrange aproximador tiene la forma siguiente(para 3 puntos).
Su cálculo es el siguiente, observando que la solución del polinomio la da envarios formatos, primero factorizado, segundo expandido en fracciones simples,y por último en decimales.
En el texto Cálculo Numérico AF.3 del Curso Modular "Teoría y apli-cación práctica del método de los elementos finitos y simulación", en su páginaIII.15, viene solo el polinomio de interpolación omitiéndose su cálculo, de laforma:
4

P2(x) =√2/2π/4 x+
1−√2
π2/8 x(x− π
4
)
Haciendo operaciones vemos como la expresión anterior es la misma que lamostrada en la calculadora en su formato expandido:
P2(x) =2√2
π x+8(1−
√2)
π2
(x2 − π
4x)= 8
π2 x2 − 2
πx− 8√2
π2 x2 + 4
√2π x
Ahora el programa Lagrange calculará el error máximo Emax . Si quere-mos hallar una cota máxima del error de interpolación E(x) en cada punto,tendremos:
E(x) = f(n+1)(ξ)(n+1)!
n∏
i=0(x− xi) , ξ ∈ [a, b]
Definamos M , de la siguiente forma:
M = maxξ∈[a,b]
∣∣f (n+1) (ξ)∣∣
Ahora definimos Φ(x), así:
Φ(x) = maxξ∈[a,b]
∣∣∣∣n∏
i=0(x− xi)
∣∣∣∣ = maxξ∈[a,b]
|(x− x0) (x− x1) · · · (x− xn)|
Entonces, tenemos:
Emax =M
(n+1)!Φ(x), ∀ξ ∈ [a, b]
De tal forma que hemos logrado un mayorando para E(x), con lo que lo-gramos cuantificar el valor máximo del error al aproximar la función mediantela interpolación de Lagrange:
E(x) ≤ Emax , ∀ξ ∈ [a, b]
5
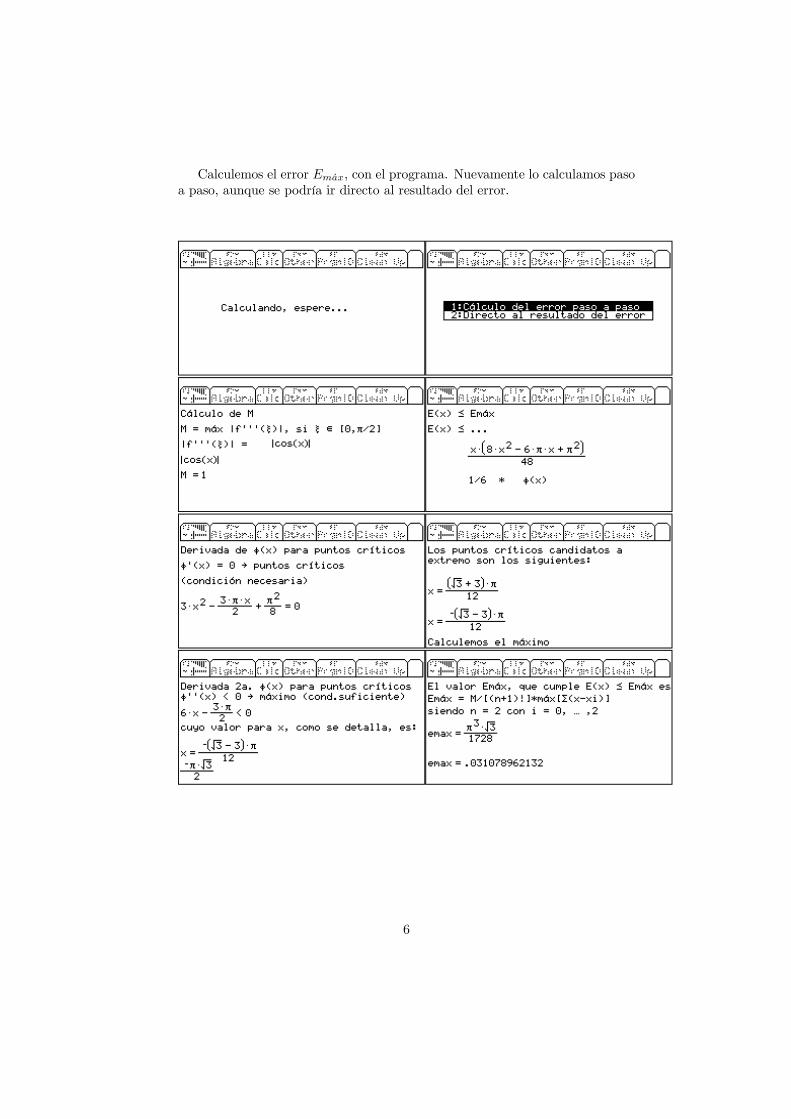
Calculemos el error Emax, con el programa. Nuevamente lo calculamos pasoa paso, aunque se podría ir directo al resultado del error.
6
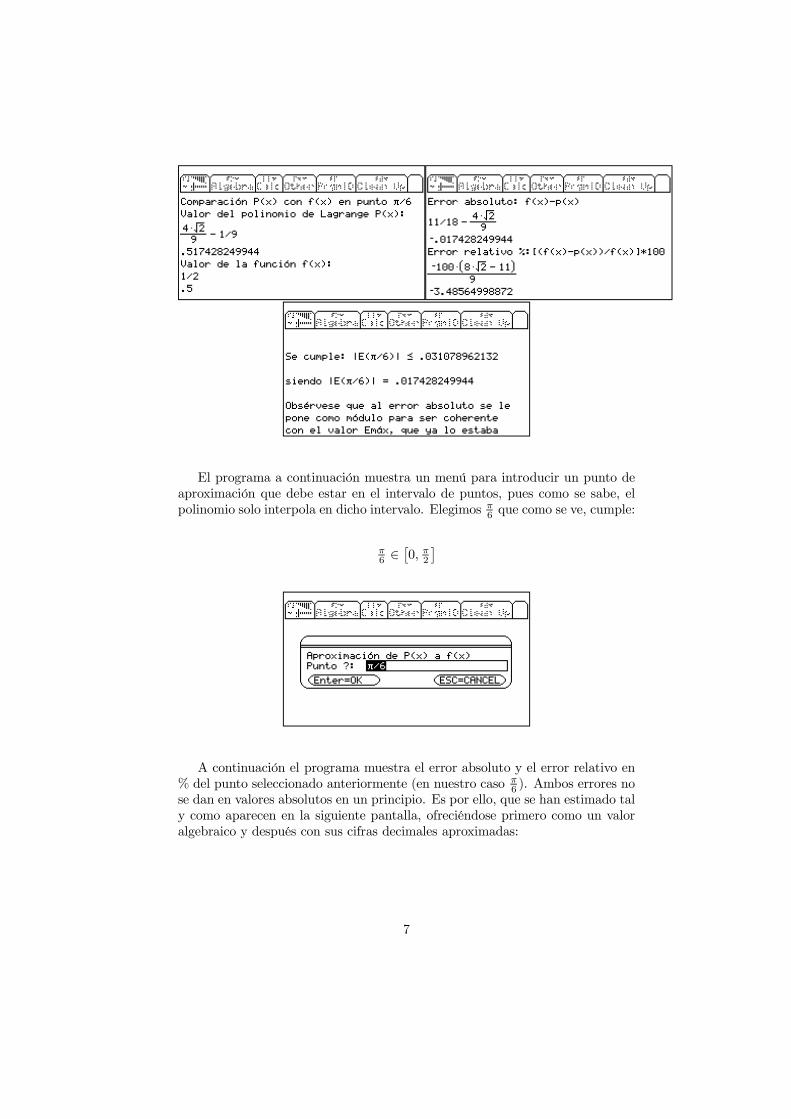
El programa a continuación muestra un menú para introducir un punto deaproximación que debe estar en el intervalo de puntos, pues como se sabe, elpolinomio solo interpola en dicho intervalo. Elegimos π
6 que como se ve, cumple:
π6 ∈
[0, π2
]
A continuación el programa muestra el error absoluto y el error relativo en% del punto seleccionado anteriormente (en nuestro caso π
6 ). Ambos errores nose dan en valores absolutos en un principio. Es por ello, que se han estimado taly como aparecen en la siguiente pantalla, ofreciéndose primero como un valoralgebraico y después con sus cifras decimales aproximadas:
7
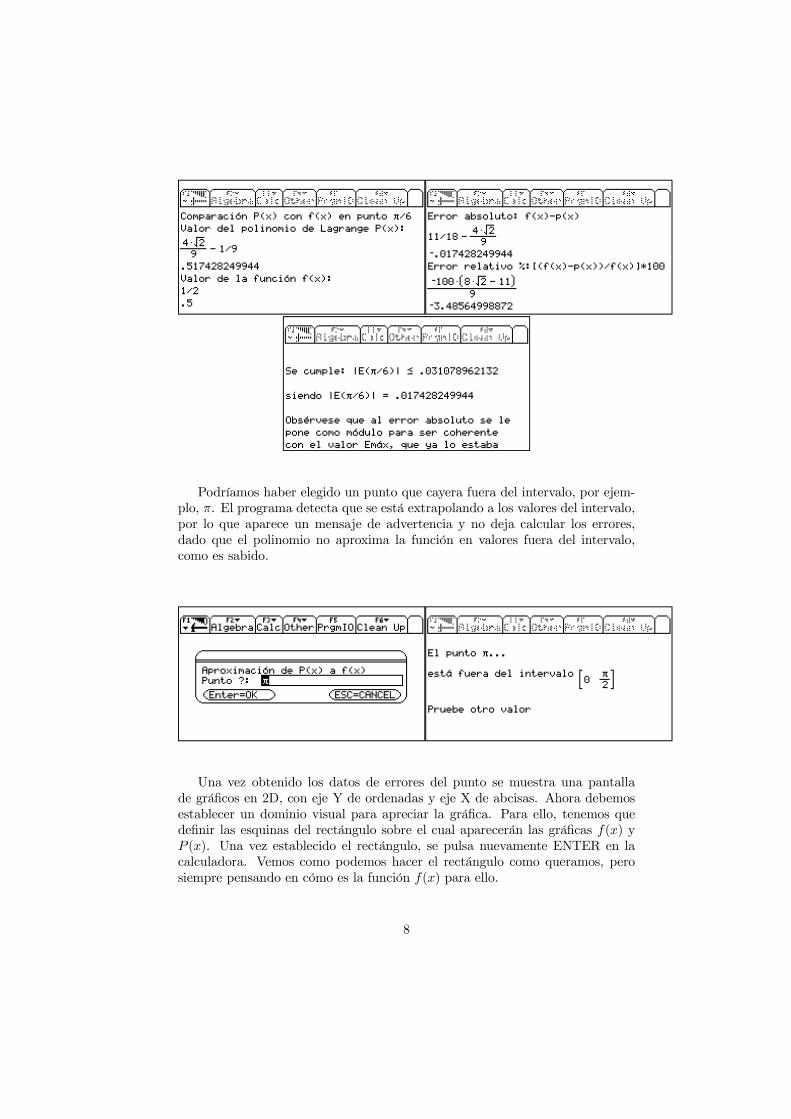
Podríamos haber elegido un punto que cayera fuera del intervalo, por ejem-plo, π. El programa detecta que se está extrapolando a los valores del intervalo,por lo que aparece un mensaje de advertencia y no deja calcular los errores,dado que el polinomio no aproxima la función en valores fuera del intervalo,como es sabido.
Una vez obtenido los datos de errores del punto se muestra una pantallade gráficos en 2D, con eje Y de ordenadas y eje X de abcisas. Ahora debemosestablecer un dominio visual para apreciar la gráfica. Para ello, tenemos quedefinir las esquinas del rectángulo sobre el cual aparecerán las gráficas f(x) yP (x). Una vez establecido el rectángulo, se pulsa nuevamente ENTER en lacalculadora. Vemos como podemos hacer el rectángulo como queramos, perosiempre pensando en cómo es la función f(x) para ello.
8

Entonces, aparecen las dos gráficas correspondientes, donde se aprecia fácil-mente que el polinomio efectivamente se aproxima a la función en los valoresdel intervalo dado.
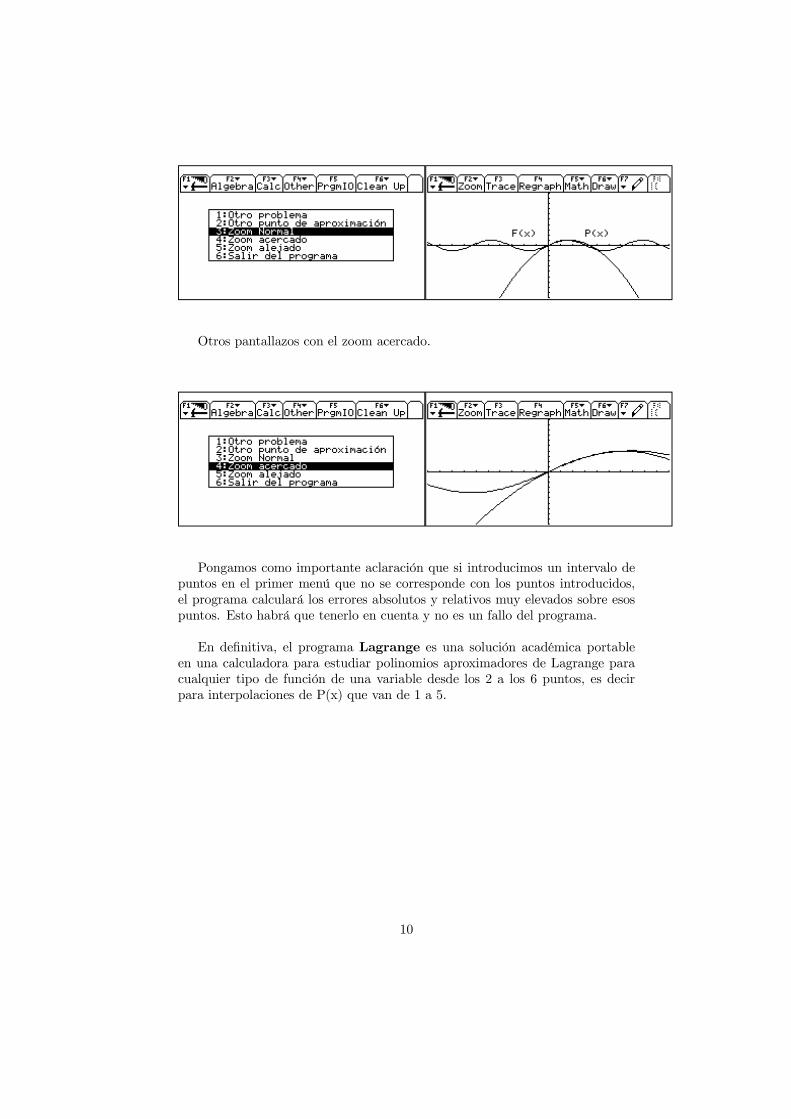
Una vez obtenidas las gráficas podemos acceder al menú de la pantalla si-guiente, donde podemos elegir varios tipos de zoom: normal, acercado y alejado.Además si seleccionamos la opción 2:Otro punto de aproximación, podremosvolver a seleccionar un rectángulo a nuestra elección.
A continuación se observa un pantallazo de las gráficas con el zoom normal.
9
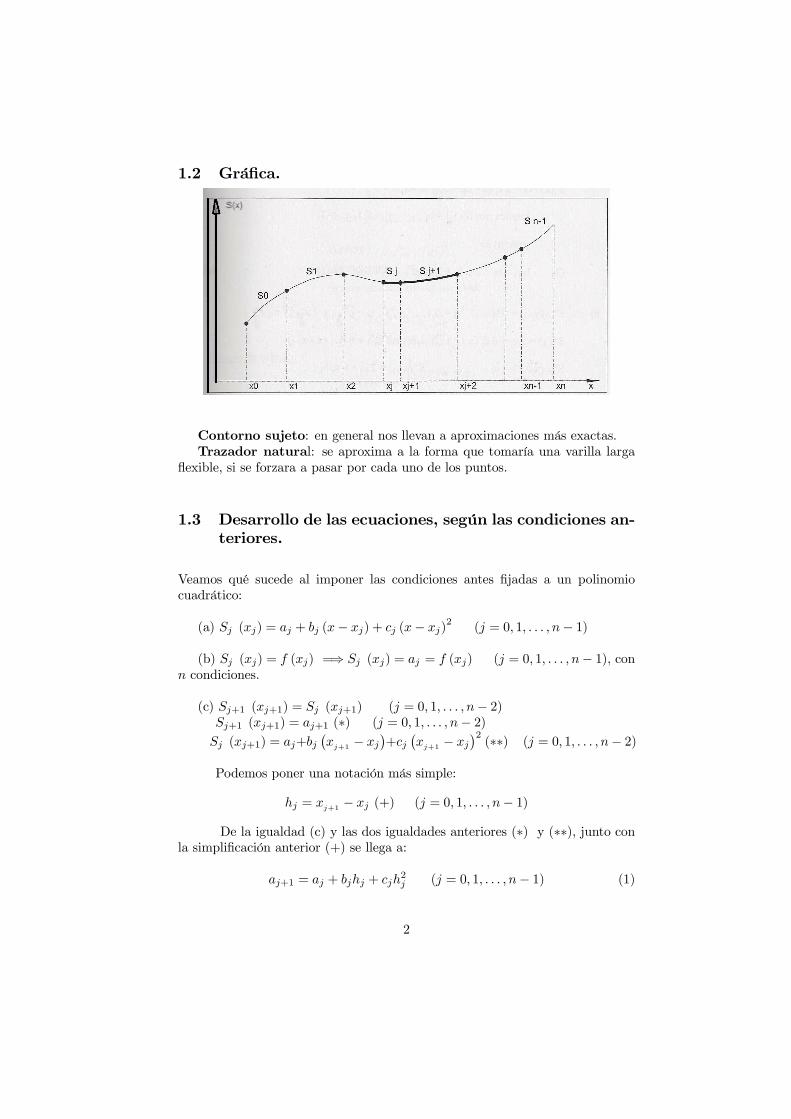
Otros pantallazos con el zoom acercado.
Pongamos como importante aclaración que si introducimos un intervalo depuntos en el primer menú que no se corresponde con los puntos introducidos,el programa calculará los errores absolutos y relativos muy elevados sobre esospuntos. Esto habrá que tenerlo en cuenta y no es un fallo del programa.
En definitiva, el programa Lagrange es una solución académica portableen una calculadora para estudiar polinomios aproximadores de Lagrange paracualquier tipo de función de una variable desde los 2 a los 6 puntos, es decirpara interpolaciones de P(x) que van de 1 a 5.
10

Vamos a definir la aproximación por Interpolación Cuadrática ”S” yconcretar su cálculo teóricamente. Después realizaremos también la Interpo-lación Cuarta "S", es decir, en polinomios de 4o grado.
1 Interpolación Cuadrática ”S”.
1.1 Definición.
Dada una función f definida en el intervalo [a, b] y los n + 1 puntos a = x0 <x1 < · · · < xn = b del mismo se denomina Interpolación Spline Cuadrática ”S”para la función f a otra función, en este caso polinómica, definida a trozossegún los intervalos,
S(x) =
S0(x); x ∈ [x0, x1]S1(x); x ∈ [x1, x2]
...Sn(x); x ∈ [xn−1, xn]
de tal forma que satisface las siguientes condiciones:
(a) ”S” es un polinomio cuadrático denominado Sj en [xj , xj+1] ,∀ j = 0, 1, . . . , n− 1
(b) Sj (xj) = f (xj) (j = 0, 1, . . . , n− 1), con n condiciones.
(c) Sj+1 (xj+1) = Sj (xj+1) (j = 0, 1, . . . , n− 2), con n− 1 condiciones.
(d) S′j+1 (xj+1) = S′
j (xj+1) (j = 0, 1, . . . , n− 2), con n− 1 condiciones.
(e) S′′j+1 (xj+1) = S′′
j (xj+1) (j = 0, 1, . . . , n− 2), con n− 1 condiciones.
(f) Satisface una condición de contorno de las siguientes:
• S′ (x0) = S′ (xn) = 0 (contorno libre) → trazador natural
• S′ (x0) = f ′ (x0) y S′ (xn) = f ′ (xn) (contorno sujeto)
1
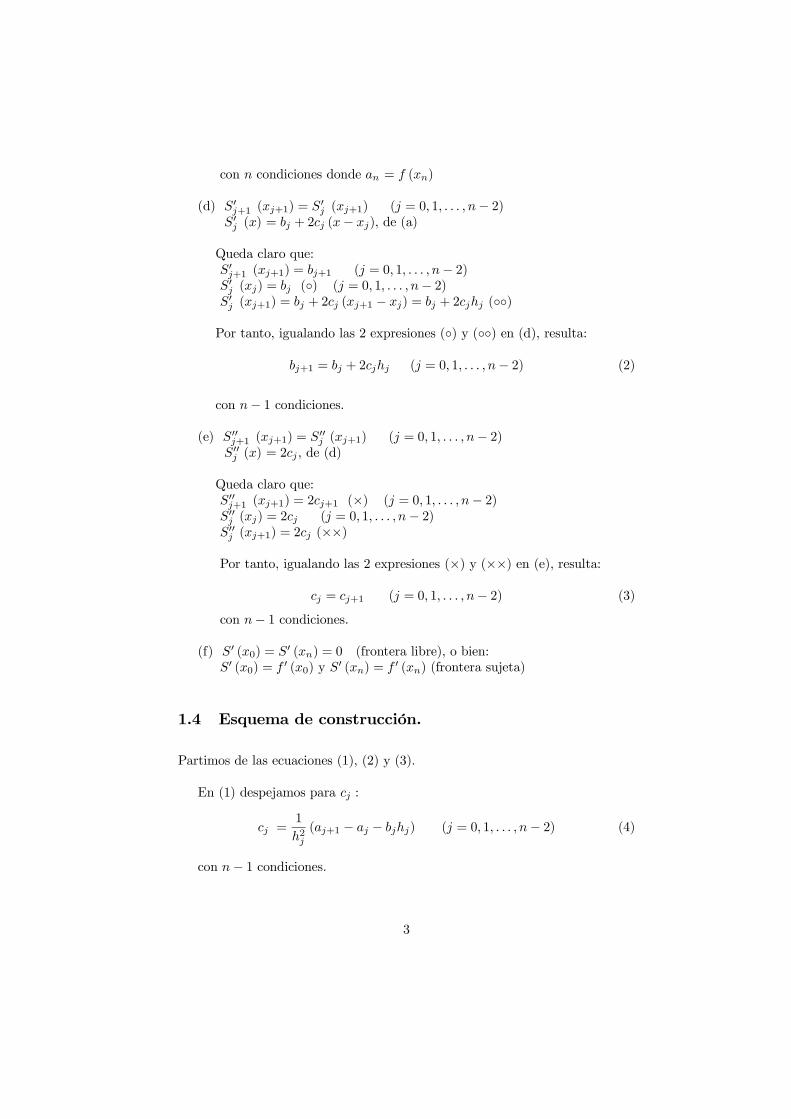
1.2 Gráfica.
Contorno sujeto: en general nos llevan a aproximaciones más exactas.Trazador natural: se aproxima a la forma que tomaría una varilla larga
flexible, si se forzara a pasar por cada uno de los puntos.
1.3 Desarrollo de las ecuaciones, según las condiciones an-
teriores.
Veamos qué sucede al imponer las condiciones antes fijadas a un polinomiocuadrático:
(a) Sj (xj) = aj + bj (x− xj) + cj (x− xj)2 (j = 0, 1, . . . , n− 1)
(b) Sj (xj) = f (xj) =⇒ Sj (xj) = aj = f (xj) (j = 0, 1, . . . , n− 1), conn condiciones.
(c) Sj+1 (xj+1) = Sj (xj+1) (j = 0, 1, . . . , n− 2)Sj+1 (xj+1) = aj+1 (∗) (j = 0, 1, . . . , n− 2)
Sj (xj+1) = aj+bj(xj+1− xj
)+cj
(xj+1− xj
)2(∗∗) (j = 0, 1, . . . , n− 2)
Podemos poner una notación más simple:
hj = xj+1 − xj (+) (j = 0, 1, . . . , n− 1)
De la igualdad (c) y las dos igualdades anteriores (∗) y (∗∗), junto conla simplificación anterior (+) se llega a:
aj+1 = aj + bjhj + cjh2j (j = 0, 1, . . . , n− 1) (1)
2
con n condiciones donde an = f (xn)
(d) S′j+1 (xj+1) = S′
j (xj+1) (j = 0, 1, . . . , n− 2)S′j (x) = bj + 2cj (x− xj), de (a)
Queda claro que:S′j+1 (xj+1) = bj+1 (j = 0, 1, . . . , n− 2)S′j (xj) = bj (◦) (j = 0, 1, . . . , n− 2)S′j (xj+1) = bj + 2cj (xj+1 − xj) = bj + 2cjhj (◦◦)
Por tanto, igualando las 2 expresiones (◦) y (◦◦) en (d), resulta:
bj+1 = bj + 2cjhj (j = 0, 1, . . . , n− 2) (2)
con n− 1 condiciones.
(e) S′′j+1 (xj+1) = S′′
j (xj+1) (j = 0, 1, . . . , n− 2)S′′j (x) = 2cj , de (d)
Queda claro que:S′′j+1 (xj+1) = 2cj+1 (×) (j = 0, 1, . . . , n− 2)S′′j (xj) = 2cj (j = 0, 1, . . . , n− 2)S′′j (xj+1) = 2cj (××)
Por tanto, igualando las 2 expresiones (×) y (××) en (e), resulta:
cj = cj+1 (j = 0, 1, . . . , n− 2) (3)
con n− 1 condiciones.
(f) S′ (x0) = S′ (xn) = 0 (frontera libre), o bien:S′ (x0) = f
′ (x0) y S′ (xn) = f
′ (xn) (frontera sujeta)
1.4 Esquema de construcción.
Partimos de las ecuaciones (1), (2) y (3).
En (1) despejamos para cj :
cj =1
h2j(aj+1 − aj − bjhj) (j = 0, 1, . . . , n− 2) (4)
con n− 1 condiciones.
3

Por analogía, construimos cj+1 :
cj+1 =1
h2j+1(aj+2 − aj+1 − bj+1hj+1) (j = 0, 1, . . . , n− 3) (5)
con n− 2 condiciones.
Igualamos las ecuaciones (4) y (5), según (3):
1
h2j
(aj+1 − aj − bjhj) =1
h2j+1
(aj+2 − aj+1 − bj+1hj+1)
Despejamos para bj+1 en la ecuación anterior:
bj+1 = hj+1
(1
h2j
(aj − aj+1 + bjhj)−aj+1−aj+2
h2j+1
)
En la ec. despejada para bj+1 anterior, sustituimos el valor bj+1, por laexpresión de la ec. (2):
bj + 2cjhj = hj+1
(1
h2j(aj − aj+1 + bjhj)−
aj+1 − aj+2h2j+1
)
(6)
Las ecuaciones (1) y (6) forman un sistema para resolver bj y cj :
{aj+1 = aj + bjhj + cjh2j
bj + 2cjhj = hj+1
(1
h2j
(aj − aj+1 + bjhj)−aj+1−aj+2
h2j+1
),
cuya solución es:
bj =1
hjh2j+1 + h
2jhj+1
(aj+1h
2j+1 − ajh
2j+1 + h
2jaj+1 − h
2jaj+2 − 2ajhjhj+1 + 2hjaj+1hj+1
),
(7)
(j = 0, 1, . . . , n− 3)
con n− 2 condiciones.
cj =1
hjh2j+1 + h
2jhj+1
(ajhj+1 − hjaj+1 + hjaj+2 − aj+1hj+1) (j = 0, 1, . . . , n− 3)
(8)
con n− 2 condiciones.
Tenemos los datos: {hj}n−1
j=0, {aj}
n−2
j=0, y con las ecuaciones (7) y (8) despe-
jamos respectivamente {bj}n
j=0, {cj}
n
j=0
4

1.5 Proceso de cálculo.
Proceso de cálculo: aj →
{(8)(9)
→
{bjcj
1.6 Resumen del cálculo.
Dada una curva f(x), definir n, xi (j = 0, 1, . . . , n) .
Llamamos: hj = xj+1 − xj (j = 0, 1, . . . , n− 1) .
aj : Sj (xj) = aj = f (xj) (j = 0, 1, . . . , n) .
Tenemos 2 condiciones suplementarias:
• S′ (x0) = S′ (xn) = 0 (frontera libre)
•
{S′ (x0) = f
′ (x0)S′ (xn) = f
′ (xn)(frontera sujeta)
bj : bj =1
hjh2j+1
+h2jhj+1
(aj+1h
2j+1 − ajh
2j+1 + h
2jaj+1 − h
2jaj+2 − 2ajhjhj+1 + 2hjaj+1hj+1
)
(j = 0, 1, . . . , n− 3)
cj : cj =1
hjh2j+1
+h2jhj+1
(ajhj+1 − hjaj+1 + hjaj+2 − aj+1hj+1) (j = 0, 1, . . . , n− 3)
Sj (xj) = aj + bj + cj (x− xj) (j = 0, 1, . . . , n− 1)
Una vez calculada la Interpolación Cuadrática ”S” se va a proceder arealizar lo mismo para polinomios de 4o grado, es decir, vamos a construir lafunción de aproximación Interpolación Spline de 4o grado.
2 Interpolación Spline de 4o grado ”S”.
2.1 Definición.
Dada una función f definida en el intervalo [a, b] y los n + 1 puntos a = x0 <x1 < · · · < xn = b del mismo se denomina Interpolación Spline de 4o grado ”S”para la función f a otra función, en este caso polinómica, definida a trozossegún los intervalos,
5
S(x) =
S0(x); x ∈ [x0, x1]S1(x); x ∈ [x1, x2]
...Sn(x); x ∈ [xn−1, xn]
de tal forma que satisface las siguientes condiciones:
(a) ”S” es un polinomio de 4o grado denominado Sj en [xj , xj+1] ,∀ j = 0, 1, . . . , n− 1
(b) Sj (xj) = f (xj) (j = 0, 1, . . . , n− 1), con n condiciones.
(c) Sj+1 (xj+1) = Sj (xj+1) (j = 0, 1, . . . , n− 2), con n− 1 condiciones.
(d) S′j+1 (xj+1) = S′
j (xj+1) (j = 0, 1, . . . , n− 2), con n− 1 condiciones.
(e) S′′j+1 (xj+1) = S′′
j (xj+1) (j = 0, 1, . . . , n− 2), con n− 1 condiciones.
(f) S′′′j+1 (xj+1) = S′′′
j (xj+1) (j = 0, 1, . . . , n− 2), con n− 1 condiciones.
(g) Satisface una condición de contorno de las siguientes:
• S′′′ (x0) = S′′′ (xn) = 0 (contorno libre) → trazador natural
• S′ (x0) = f′ (x0) y S
′ (xn) = f′ (xn) (contorno sujeto)
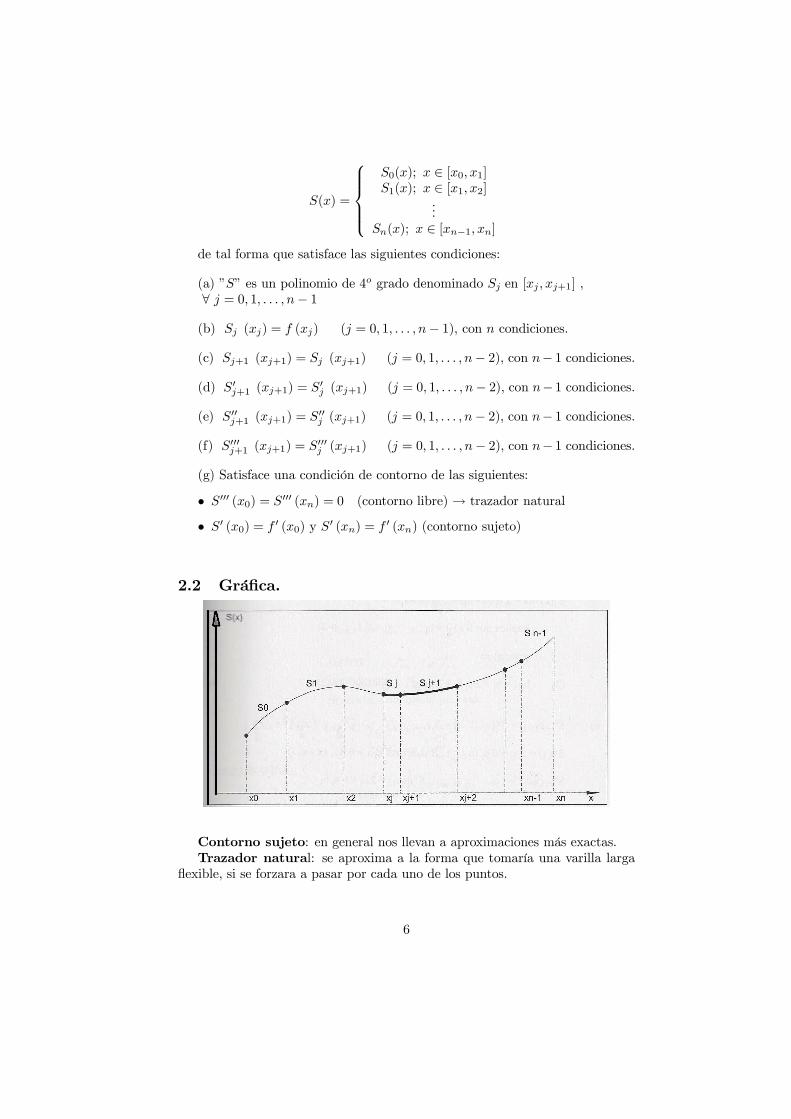
2.2 Gráfica.
Contorno sujeto: en general nos llevan a aproximaciones más exactas.Trazador natural: se aproxima a la forma que tomaría una varilla larga
flexible, si se forzara a pasar por cada uno de los puntos.
6

2.3 Desarrollo de las ecuaciones, según las condiciones an-
teriores.
Veamos qué sucede al imponer las condiciones antes fijadas a un polinomio de4o grado:
(a) Sj (xj) = aj+bj (x− xj)+cj (x− xj)2+dj (x− xj)
3+ ej (x− xj)
4(j = 0, 1, . . . , n− 1)
(b) Sj (xj) = f (xj) =⇒ Sj (xj) = aj = f (xj) (j = 0, 1, . . . , n− 1), conn condiciones.
(c) Sj+1 (xj+1) = Sj (xj+1) (j = 0, 1, . . . , n− 2)Sj+1 (xj+1) = aj+1 (j = 0, 1, . . . , n− 2) (∗)
Sj (xj+1) = aj + bj(xj+1− xj
)+ cj
(xj+1− xj
)2+ dj
(xj+1− xj
)3+
+ej(xj+1− xj
)4(j = 0, 1, . . . , n− 2) (∗∗)
Podemos poner una notación más simple:
hj = xj+1 − xj (+) (j = 0, 1, . . . , n− 1)
De la igualdad (c) y las dos igualdades anteriores (∗) y (∗∗), junto conla simplificación anterior (+) se llega a:
aj+1 = aj + bjhj + cjh2j + djh
3j + ejh
4j (j = 0, 1, . . . , n− 1) (9)
con n condiciones donde an = f (xn)
(d) S′j+1 (xj+1) = S′
j (xj+1) (j = 0, 1, . . . , n− 2)
S′j (x) = bj + 2cj (x− xj) + 3dj (x− xj)2 + 4ej (x− xj)
3
(j = 0, 1, . . . , n− 2), de (a)
Queda claro que:S′j+1 (xj+1) = bj+1 (j = 0, 1, . . . , n− 2)S′j (xj) = bj (j = 0, 1, . . . , n− 2) (◦)
S′j (xj+1) = bj +2cj (xj+1 − xj)+ 3dj (xj+1 − xj)2+4ej (xj+1 − xj)
3 =
= bj + 2cjhj+ 3djh2j + 4ejh
3j (j = 0, 1, . . . , n− 2) (◦◦)
Por tanto, igualando las 2 expresiones (◦) y (◦◦) en (d), resulta:
bj+1 = bj + 2cjhj + 3djh2j + 4ejh
3j (j = 0, 1, . . . , n− 2) (10)
con n− 1 condiciones.
(e) S′′j+1 (xj+1) = S′′
j (xj+1) (j = 0, 1, . . . , n− 2)
S′′j (x) = 2cj + 6dj (x− xj) + 12ej (x− xj)2
7

(j = 0, 1, . . . , n− 2), de (d)
Queda claro que:S′′j+1 (xj+1) = 2cj+1 (j = 0, 1, . . . , n− 2) (×)
S′′j+1 (x) = 2cj+1+ 6dj+1 (x− xj+1) + 12ej+1 (x− xj+1)2
(j = 0, 1, . . . , n− 2)S′′j (xj) = 2cj (j = 0, 1, . . . , n− 2)
S′′j (xj+1) = 2cj+ 6dj (xj+1 − x) + 12ej (xj+1 − x)2 =
= 2cj+ 6djhj + 12ejh2j (j = 0, 1, . . . , n− 2) (××)
Por tanto, igualando las 2 expresiones (×) y (××) en (e), resulta:
cj+1 = cj + 3djhj + 6ejh2j (j = 0, 1, . . . , n− 2) (11)
con n− 1 condiciones.
(f) S′′′j+1 (xj+1) = S′′′
j (xj+1) (j = 0, 1, . . . , n− 2)S′′′j (x) = 6dj + 24ej (x− xj) (j = 0, 1, . . . , n− 2), de (d)
Queda claro que:S′′′j+1 (xj+1) = 6dj+1 (j = 0, 1, . . . , n− 2) (·)S′′′j+1 (x) = 6dj+1 + 24ej+1 (x− xj+1)S′′j (xj) = 6dj (j = 0, 1, . . . , n− 2)S′′j (xj+1) = 6dj + 24ej (xj+1 − x) = 6dj + 24ejhj (··)
Por tanto, igualando las 2 expresiones (·) y (··) en (f), resulta:
dj+1 = dj + 4ejhj (j = 0, 1, . . . , n− 2) (12)
con n− 1 condiciones.
(g) S′′′ (x0) = S′′′ (xn) = 0 (frontera libre), o bien:
S′ (x0) = f′ (x0) y S
′ (xn) = f′ (xn) (frontera sujeta)
2.4 Esquema de construcción.
Partimos de las ecuaciones (9), (10), (11) y (12).
Despejando ej en (12): obtenemos:
ej =1
4hj(dj+1 − dj) (j = 0, 1, . . . , n− 2) (13)
Ahora sustituimos la ecuación anterior, en (9), (10) y (11):
8

aj+1 = aj + bjhj + cjh2j +
h3j
4(3dj + dj+1) (j = 0, 1, . . . , n− 1) (14)
bj+1 = bj + 2cjhj + h2j (2dj + dj+1) (j = 0, 1, . . . , n− 1) (15)
cj+1 = cj +3
2hj (dj + dj+1) (j = 0, 1, . . . , n− 1) (16)
Despejamos bj de (13) y por analogía creemos bj−1:
bj =1
hj(aj+1 − aj)− cjhj −
h2j
4(3dj + dj+1) (j = 0, 1, . . . , n)(17)
bj−1 =1
hj−1(aj − aj−1)− cj−1hj−1 −
h2j−1
4(3dj−1 + dj) (18)
(j = 0, 1, . . . , n− 1) (19)
Sustituyendo estos valores en la ec. (15), cuando el índice se reduce en uno:
bj = bj−1 + 2cj−1hj−1 + h2j−1 (2dj−1 + dj) (j = 0, 1, . . . , n− 1) (20)
Ahora en la ec. (19) sustituimos los valores de bj en (17) y de bj−1 en (18):
1
hj(aj+1 − aj)− cjhj −
h2j4(3dj + dj+1) =
1
hj−1(aj − aj−1)− cj−1hj−1−
−h2j−14
(3dj−1 + dj) + 2cj−1hj−1 + h2j−1 (2dj−1 + dj) =⇒
4
hj(aj+1 − aj)−
4
hj−1(aj − aj−1) = 4hj−1cj−1+4hjcj+3
(h2j−1 + h
2j
)dj+h
2jdj+1+5h
2j−1dj−1
(21)
(j = 0, 1, . . . , n− 1)
Tenemos los datos: {hj}n−1
j=0, {aj}
n
j=0, y entre la ecs. (16) y (20) podemos
hallar las incógnitas {cj}n
j=0, {dj}
n
j=0.
Posteriormente podemos hallar {bj}n−1
j=0de las ecs. (17) y (18). Finalmente
de la ec. (13) hallamos {ej}n−1
j=0
2.5 Proceso de cálculo.
Datos:
{hjaj
→ Incógnitas:
{(16)(20)
→
{cjdj
→ (17) & (18)→ bj → (13)→ ej
9

2.6 Resumen del cálculo.
Dada una curva f(x), definir n, xi (j = 0, 1, . . . , n) .
Llamamos: hj = xj+1 − xj (j = 0, 1, . . . , n− 1) .
aj : Sj (xj) = aj = f (xj) (j = 0, 1, . . . , n) .
Tenemos 2 condiciones suplementarias:
• S′ (x0) = S′ (xn) = 0 (frontera libre)
•
{S′ (x0) = f
′ (x0)S′ (xn) = f
′ (xn)(frontera sujeta)
cj & dj :
cj+1 = cj +3
2hj (dj + dj+1)
4
hj(aj+1 − aj)−
4
hj−1(aj − aj−1) = 4hj−1cj−1 + 4hjcj + 3
(h2j−1 + h
2j
)dj+
+h2jdj+1 + 5h2j−1dj−1
bj :
bj =
1
hj(aj+1 − aj)− cjhj −
h2j4(3dj + dj+1)
bj−1 =1
hj−1(aj − aj−1)− cj−1hj−1 −
h2j−14(3dj−1 + dj)
ej : ej =1
4hj(dj+1 − dj)
Sj (xj) = aj + bj (x− xj) + cj (x− xj)2 + dj (x− xj)
3+ ej (x− xj)4
(j = 0, 1, . . . , n− 1)
10
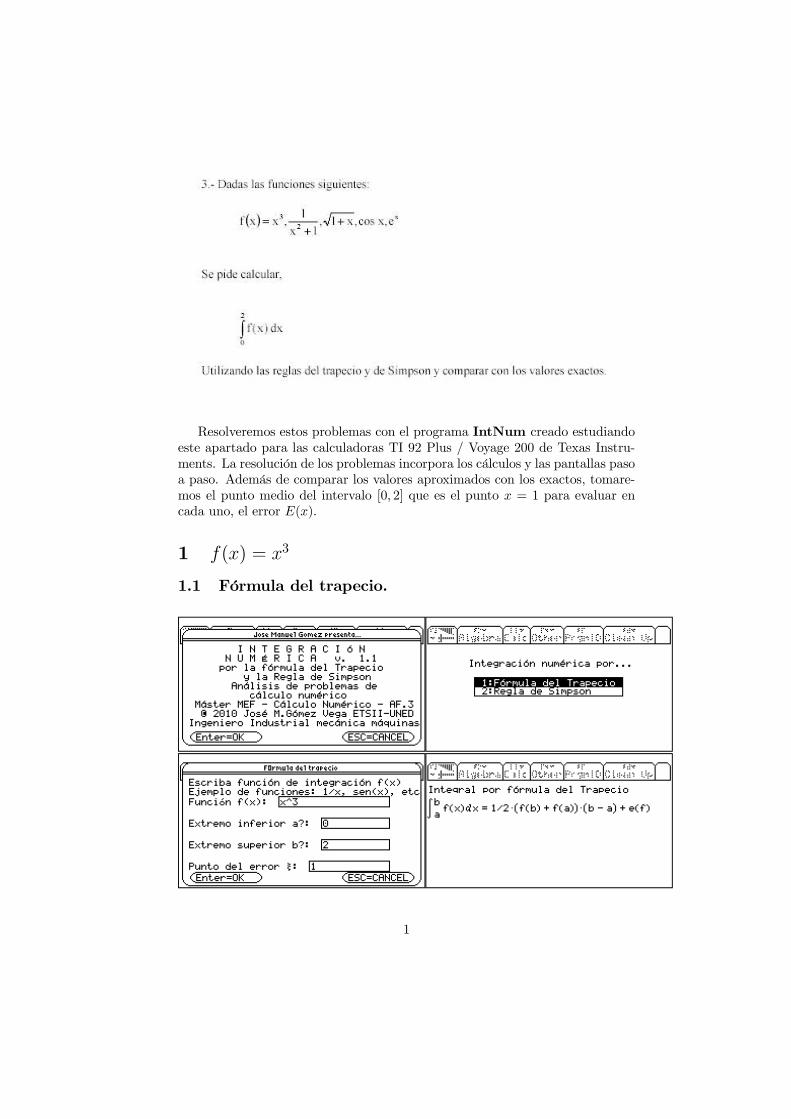
Resolveremos estos problemas con el programa IntNum creado estudiandoeste apartado para las calculadoras TI 92 Plus / Voyage 200 de Texas Instru-ments. La resolución de los problemas incorpora los cálculos y las pantallas pasoa paso. Además de comparar los valores aproximados con los exactos, tomare-mos el punto medio del intervalo [0, 2] que es el punto x = 1 para evaluar encada uno, el error E(x).
1 f(x) = x3
1.1 Fórmula del trapecio.
1

1.2 Regla de Simpson.
2
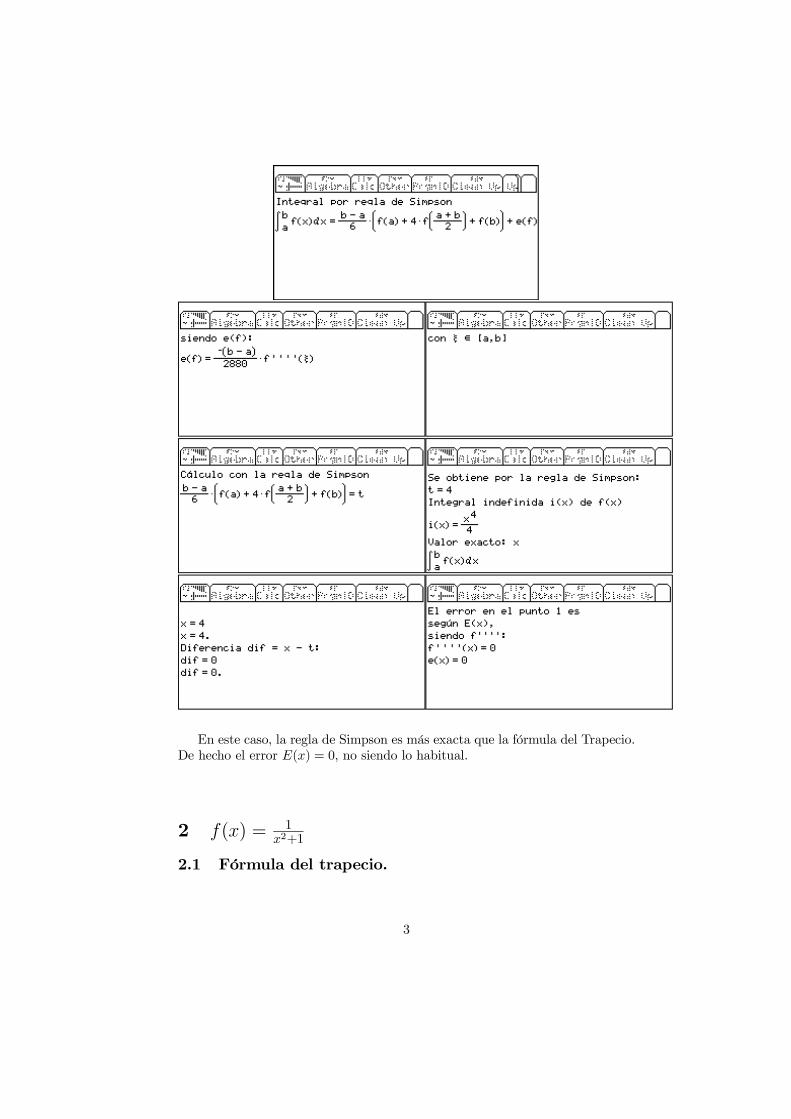
En este caso, la regla de Simpson es más exacta que la fórmula del Trapecio.De hecho el error E(x) = 0, no siendo lo habitual.
2 f(x) = 1x2+1
2.1 Fórmula del trapecio.
3

2.2 Regla de Simpson.
4
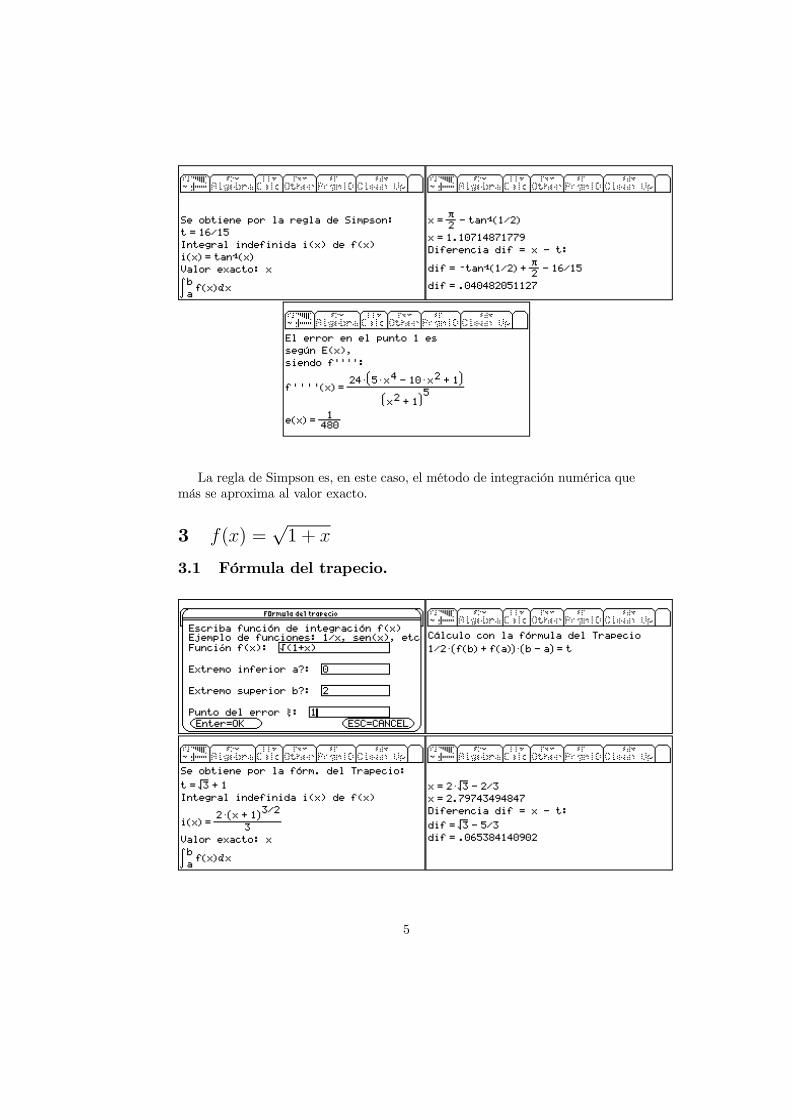
La regla de Simpson es, en este caso, el método de integración numérica quemás se aproxima al valor exacto.
3 f(x) =√1 + x
3.1 Fórmula del trapecio.
5
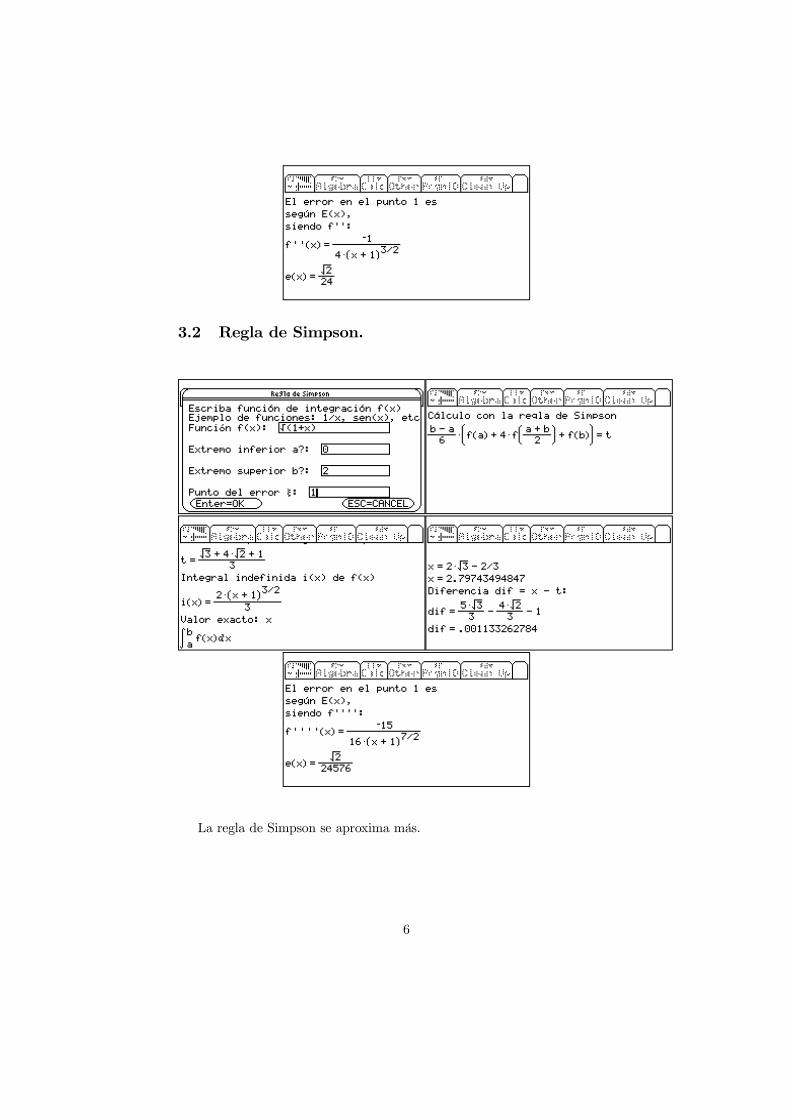
3.2 Regla de Simpson.
La regla de Simpson se aproxima más.
6
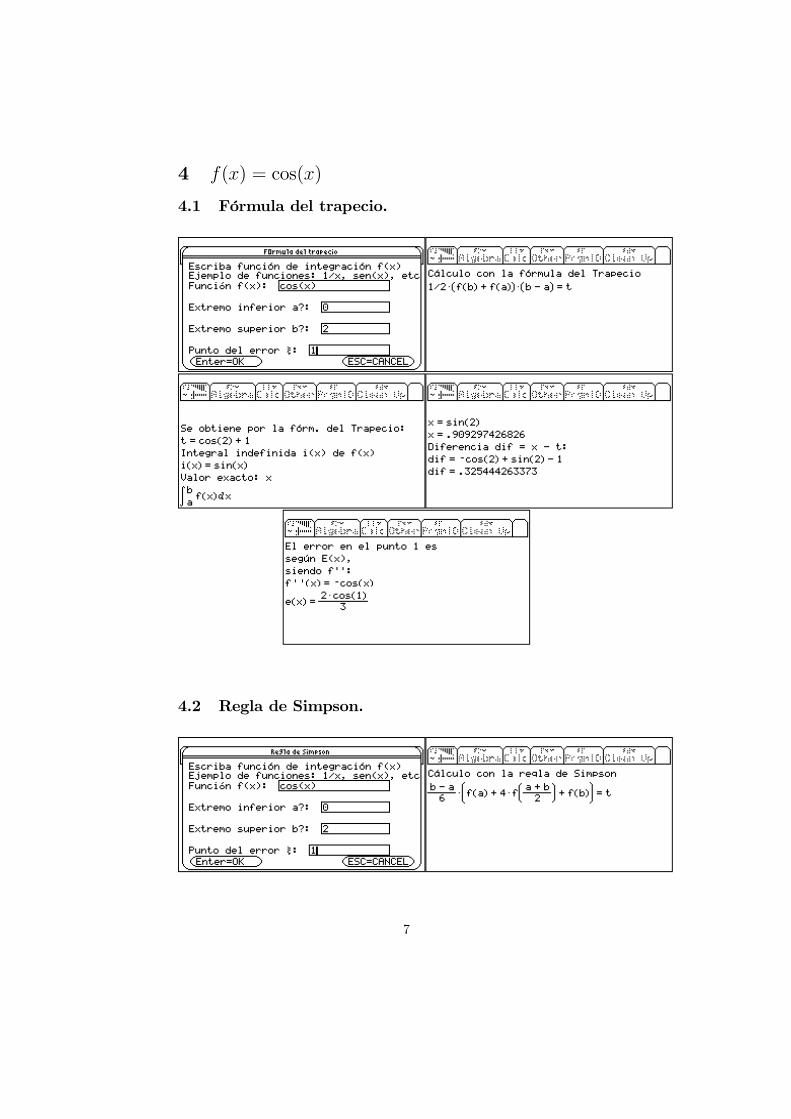
4 f(x) = cos(x)
4.1 Fórmula del trapecio.
4.2 Regla de Simpson.
7
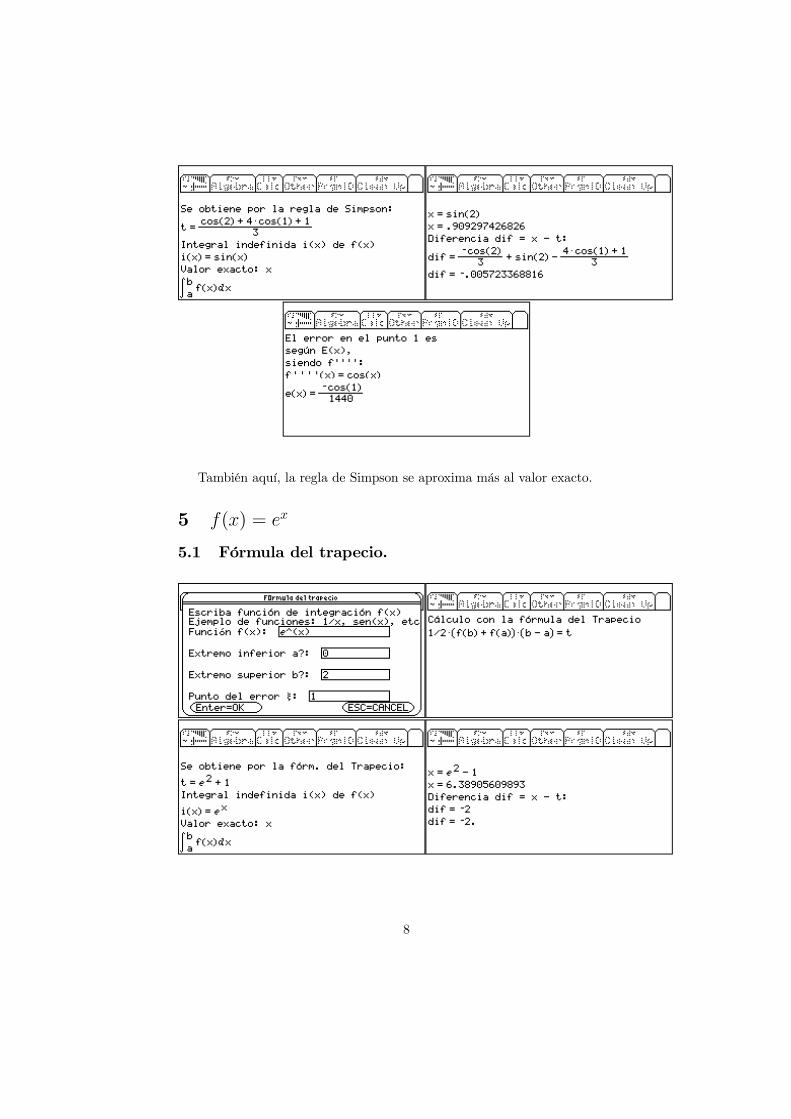
También aquí, la regla de Simpson se aproxima más al valor exacto.
5 f(x) = ex
5.1 Fórmula del trapecio.
8

5.2 Regla de Simpson.
La regla de Simpson se aproxima más al valor exacto.
Como conclusión final y tal y como se puede constatar, la regla de Simpsones un procedimiento de cálculo de integración numérica que se aproxima más alvalor exacto de la integral, si bien el desarrollo de su cálculo es un poco más
9

complejo, tal y como se observa de una simple inspección a la naturaleza dela función aproximadora. En este ejercicio hemos podido comprobar cómo enpoco tiempo se pueden desarrollar algoritmos de cálculo para evitar tener quehacerlos repetitivos a mano, siendo una solución más eficiente al problema.
10
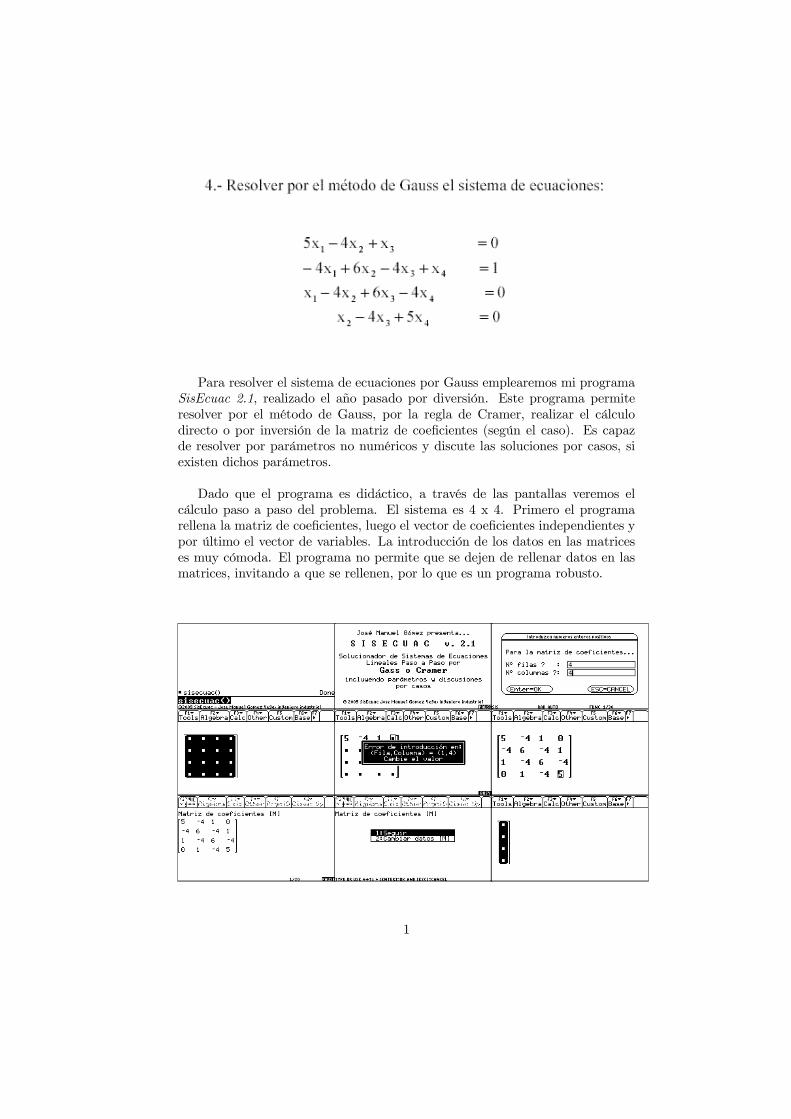
Para resolver el sistema de ecuaciones por Gauss emplearemos mi programaSisEcuac 2.1, realizado el año pasado por diversión. Este programa permiteresolver por el método de Gauss, por la regla de Cramer, realizar el cálculodirecto o por inversión de la matriz de coeficientes (según el caso). Es capazde resolver por parámetros no numéricos y discute las soluciones por casos, siexisten dichos parámetros.
Dado que el programa es didáctico, a través de las pantallas veremos elcálculo paso a paso del problema. El sistema es 4 x 4. Primero el programarellena la matriz de coeficientes, luego el vector de coeficientes independientes ypor último el vector de variables. La introducción de los datos en las matriceses muy cómoda. El programa no permite que se dejen de rellenar datos en lasmatrices, invitando a que se rellenen, por lo que es un programa robusto.
1
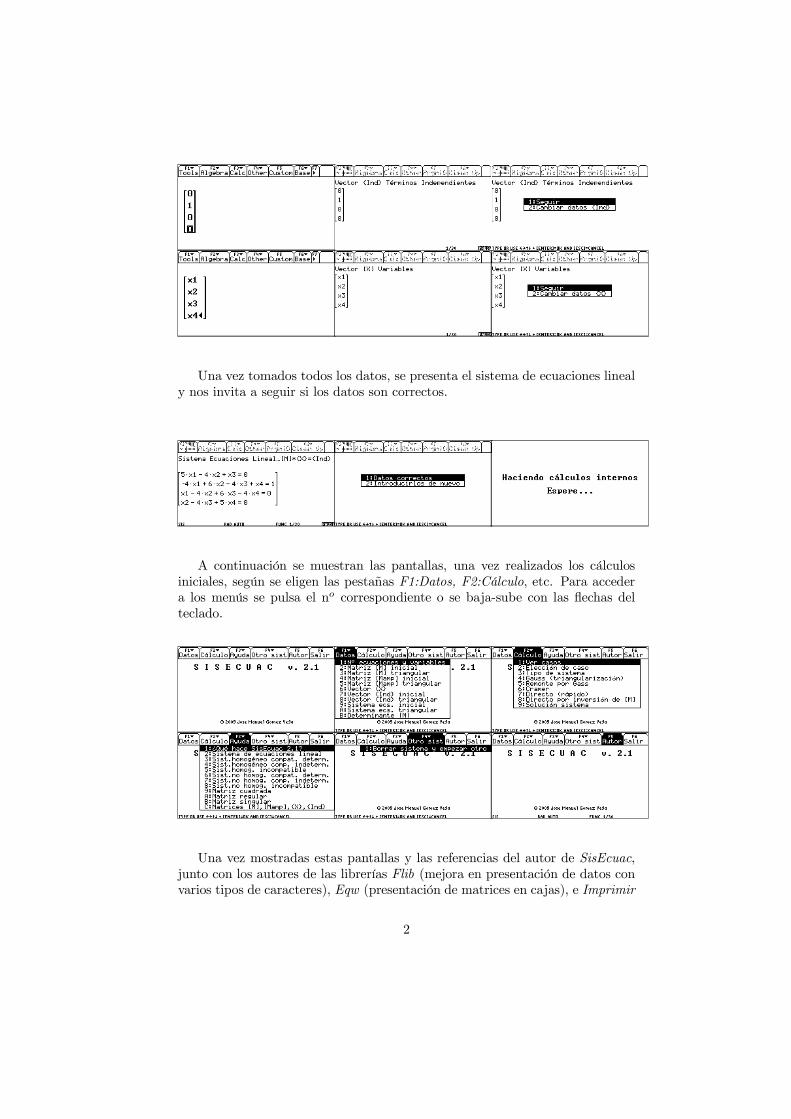
Una vez tomados todos los datos, se presenta el sistema de ecuaciones linealy nos invita a seguir si los datos son correctos.
A continuación se muestran las pantallas, una vez realizados los cálculosiniciales, según se eligen las pestañas F1:Datos, F2:Cálculo, etc. Para accedera los menús se pulsa el no correspondiente o se baja-sube con las flechas delteclado.
Una vez mostradas estas pantallas y las referencias del autor de SisEcuac,junto con los autores de las librerías Flib (mejora en presentación de datos convarios tipos de caracteres), Eqw (presentación de matrices en cajas), e Imprimir
2
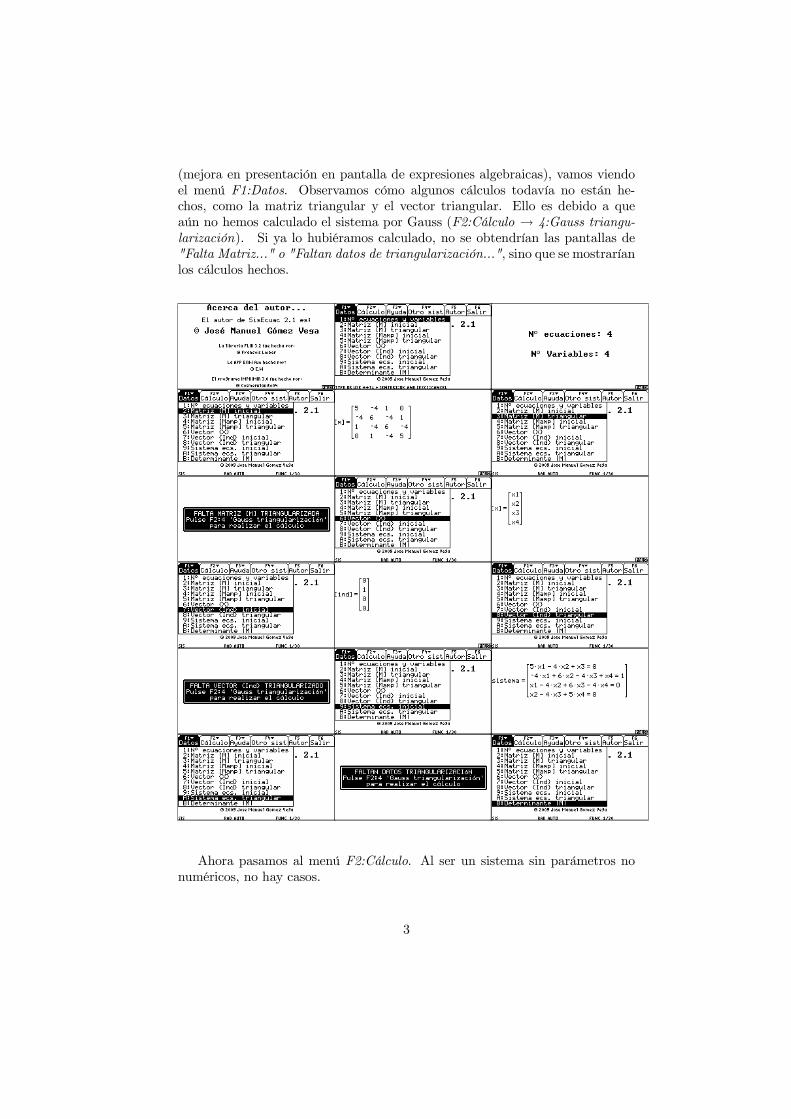
(mejora en presentación en pantalla de expresiones algebraicas), vamos viendoel menú F1:Datos. Observamos cómo algunos cálculos todavía no están he-chos, como la matriz triangular y el vector triangular. Ello es debido a queaún no hemos calculado el sistema por Gauss (F2:Cálculo → 4:Gauss triangu-larización). Si ya lo hubiéramos calculado, no se obtendrían las pantallas de"Falta Matriz..." o "Faltan datos de triangularización...", sino que se mostraríanlos cálculos hechos.
Ahora pasamos al menú F2:Cálculo. Al ser un sistema sin parámetros nonuméricos, no hay casos.
3

El programa describe como es el sistema. En este caso es un sistema no ho-mogéneo compatible. Además, SisEcuac razona porqué lo es, como apareceen las pantallas siguientes. Además, el sistema es determinado, y nuevamenterazona porqué es compatible determinado.
Al pulsar F2:Cálculo → 4:Gauss (triangularización), comienza el cálculo poreste método. El sistema da además más pantallas en las que relata los pasosen el proceso de triangularización cada vez que comienza un paso de la forma"Paso i, cambio fila (o columna) j", pantallas que no se muestran aquí, peroque existen en el programa
4
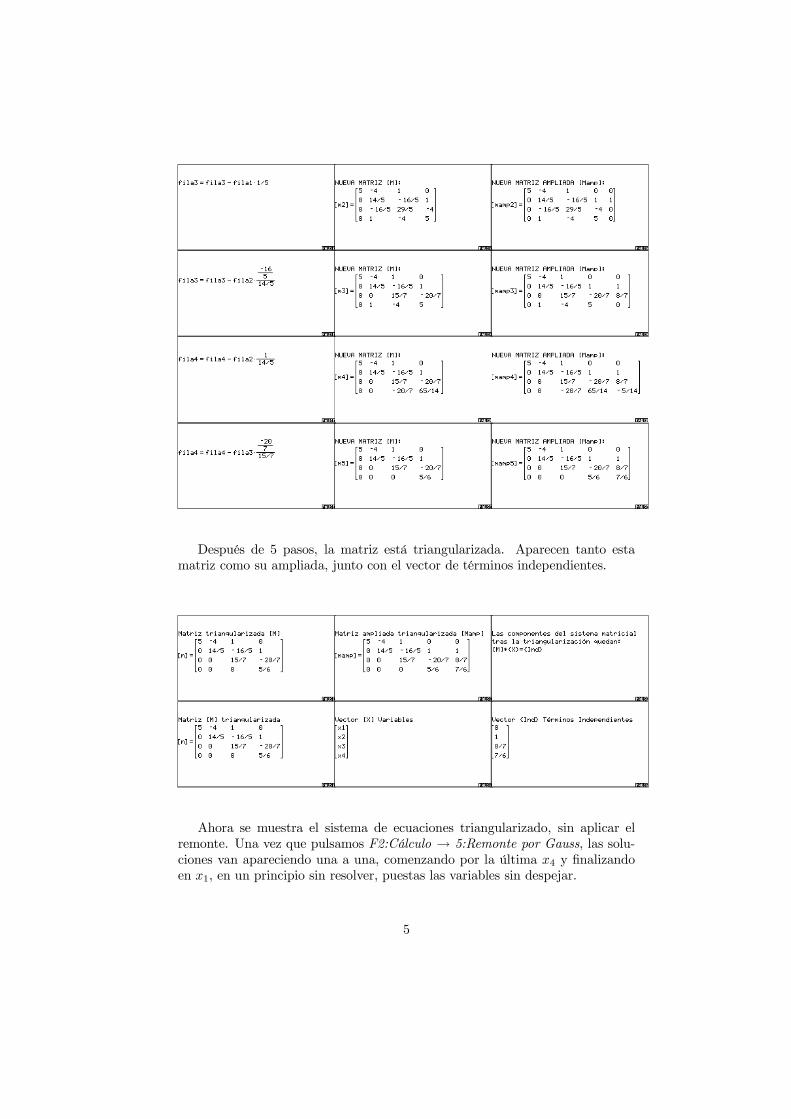
Después de 5 pasos, la matriz está triangularizada. Aparecen tanto estamatriz como su ampliada, junto con el vector de términos independientes.
Ahora se muestra el sistema de ecuaciones triangularizado, sin aplicar elremonte. Una vez que pulsamos F2:Cálculo → 5:Remonte por Gauss, las solu-ciones van apareciendo una a una, comenzando por la última x4 y finalizandoen x1, en un principio sin resolver, puestas las variables sin despejar.
5
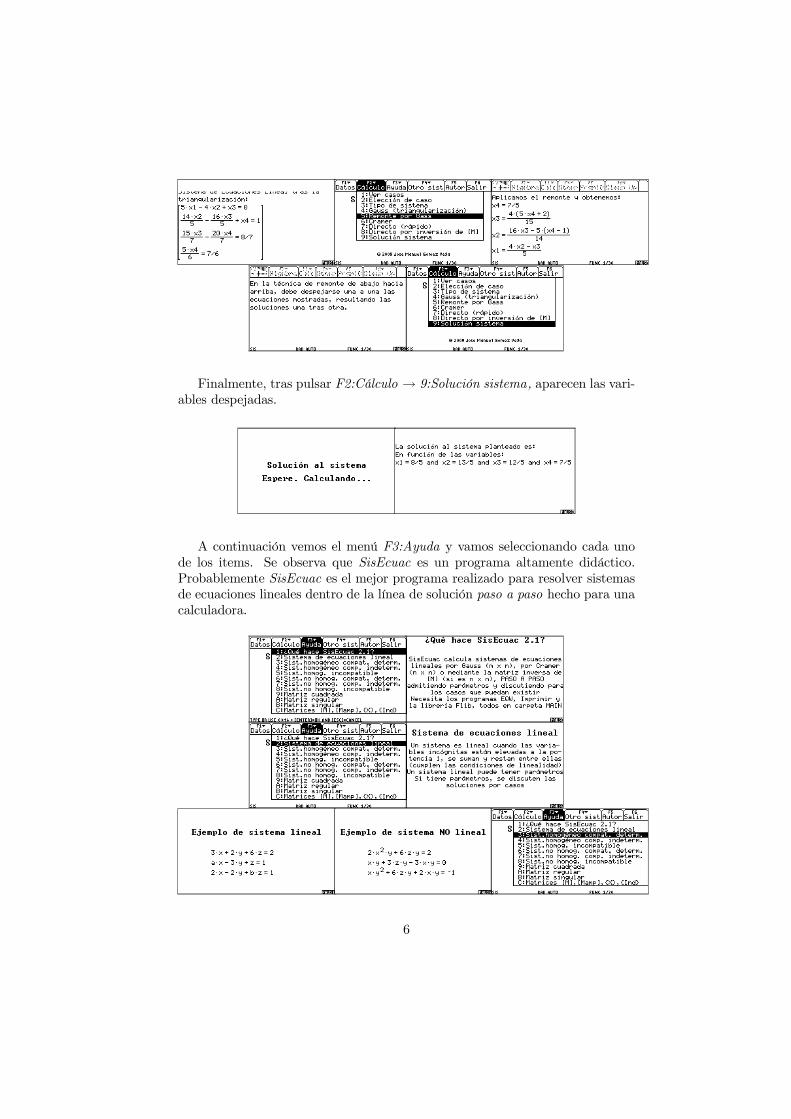
Finalmente, tras pulsar F2:Cálculo → 9:Solución sistema, aparecen las vari-ables despejadas.
A continuación vemos el menú F3:Ayuda y vamos seleccionando cada unode los items. Se observa que SisEcuac es un programa altamente didáctico.Probablemente SisEcuac es el mejor programa realizado para resolver sistemasde ecuaciones lineales dentro de la línea de solución paso a paso hecho para unacalculadora.
6

Aunque ya hemos calculado lo que se pedía en el problema, a continuaciónrealizaremos más cálculos con SisEcuac. Si pulsamos F2:Cálculo → 7:Directo(rápido), el programa calcula el sistema y ofrece las soluciones. Esta es lasolución más rápida para hallar las soluciones de un sistema si no se requiererealizarlo "paso a paso".
7
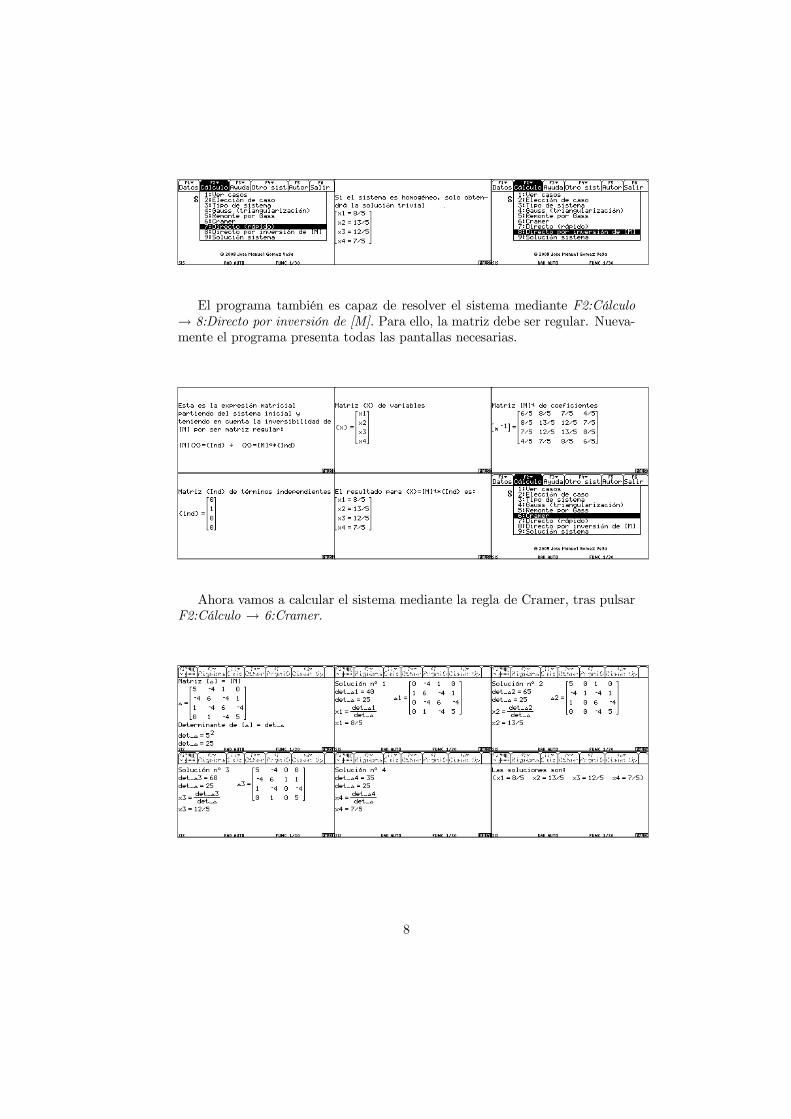
El programa también es capaz de resolver el sistema mediante F2:Cálculo→ 8:Directo por inversión de [M]. Para ello, la matriz debe ser regular. Nueva-mente el programa presenta todas las pantallas necesarias.
Ahora vamos a calcular el sistema mediante la regla de Cramer, tras pulsarF2:Cálculo → 6:Cramer.
8
Imagen de la calculadora TI 92 Plus
Con este problema se ha comprobado la eficiencia de cálculo del programaSisEcuac y su forma didáctica de mostrar paso a paso, las soluciones de unsistema de ecuaciones lineales.
9

El sistema se puede poner como:
[A] {x} = {b}
que es:
1 −1 1−1 5 11 1 3
x1x2x3
=
110
Resolver mediante el método de Cholesky significa descomponer [A] en dosmatrices [L] (triangular inferior) y [U ] (triangular superior), donde [U ] = [L]t .
Se resuelve mediante:
[A] {x} = {b}[L] [L]t {x} = {b}
[L] {y} = {b} (por descenso, al ser triangular inferior [L] )[L]t {x} = {y} (por remonte, al ser triangular superior [L]t )
Debemos comprobar las condiciones para poder aplicar el método.
1a) La matriz [A] debe ser simétrica, es decir, debe cumplir:
[A] = [A]t
Se observa que, en efecto, [A] lo es:
[A] =
1 −1 1−1 5 11 1 3
= [A]t
2a) Una condición necesaria y suficiente debe ser que la matriz simétrica seadefinida positiva, es decir:
∀ {x} ∈ ℜn, x �= 0 : {x}t [A] {x} > 0
1

para poderla poner factorizada en la forma
[A] = [L] [L]t
Vamos a demostrarlo:
Sea el vector genérico {x}t = {x1, x2, x3} .Desarrollemos el cálculo {x}t [A] {x} :
{x1, x2, x3}
1 −1 1−1 5 11 1 3
x1x2x3
=
x21 + 5x22 + 3x
23 − 2x1x2 + 2x1x3 + 2x2x3 =
=(x21 − 2x1x2 + x22
)+ 4x22 + 3x
23 + 2x1x3 + 2x2x3 =
= (x1 − x2)2 + 4x22 + 3x23 + 2x1x3 + 2x2x3 > 0,para todo conjunto de valores que no sea x1 = x2 = x3 = 0.
Estamos en condiciones de aplicar el método.
[A] =
1 −1 1−1 5 11 1 3
=
a11 a12 a13a21 a22 a23a31 a32 a33
=
=
l11 0 0l21 l22 0l31 l32 l33
l11 l21 l310 l22 l320 0 l33
A continuación hallamos los coeficientes lij de las matrices [L] y [L]t :
a11 = 1 =⇒ a11 = l11 · l11 + 0 · 0 + 0 · 0 =⇒ l11 = +√a11 = 1
a21 = −1 =⇒ a21 = l21 · l11 + l22 · 0 + 0 · 0 =⇒ l21 =a21l11= −1
1 = 1
a31 = 1 =⇒ a31 = l21 · l11 + l22 · 0 + 0 · 0 =⇒ l31 =a21l11= −1
1 = 1
a22 = 5 =⇒ a22 = l21 · l21 + l22 · l22 + 0 · 0 =⇒ l222 = a22 − l221 =⇒l22 = +
√a22 − l221 = +
√5− (−1)2 = 2
a32 = 1 =⇒ a32 = l31 · l21 + l32 · l22 + l33 · 0 =⇒ l32 =a32−l31·l21
l22= 1−1·(−1)
2 = 1
a33 = 3 =⇒ a33 = l31 · l31 + l32 · l32 + l33 · l33 =⇒ l33 = +√a33 − l231 − l232 =
= +√3− 12 − 1 = 1
Introduciendo los valores a los coeficientes hallados, tenemos:
[L] =
l11 0 0l21 l22 0l31 l32 l33
=
1 0 0−1 2 01 1 1
[L]t = U =
l11 l21 l310 l22 l320 0 l33
=
1 −1 10 2 10 0 1
2
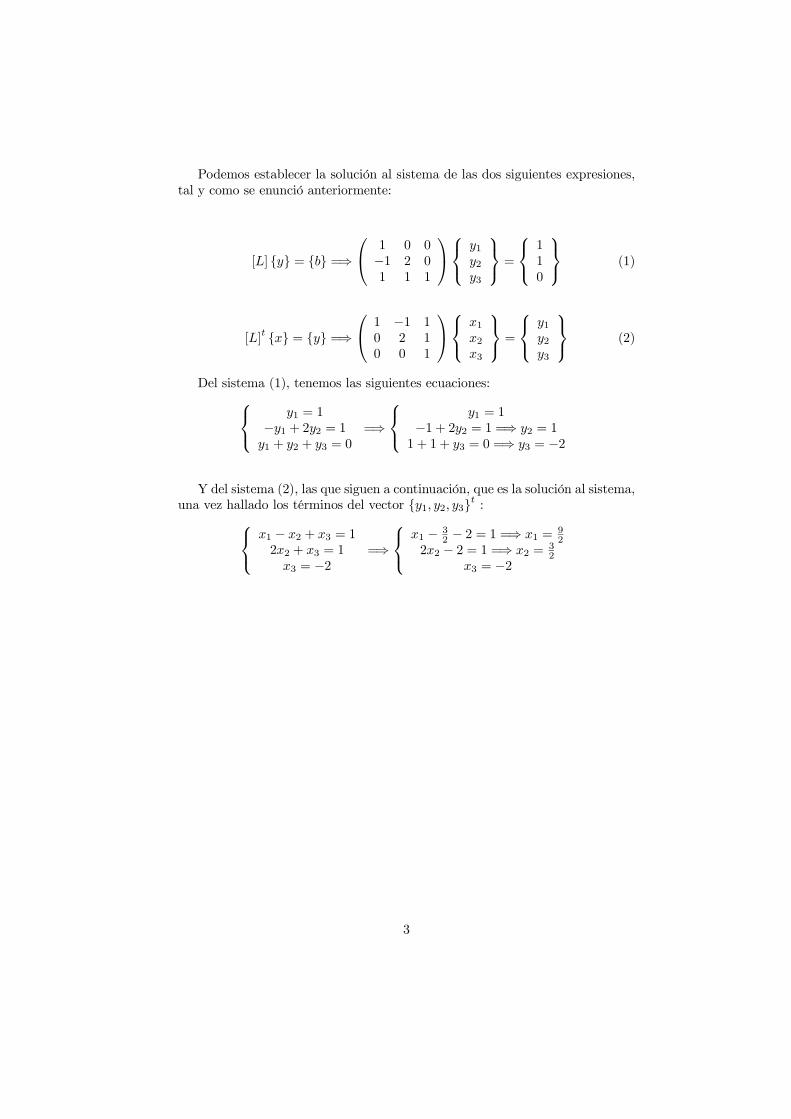
Podemos establecer la solución al sistema de las dos siguientes expresiones,tal y como se enunció anteriormente:
[L] {y} = {b} =⇒
1 0 0−1 2 01 1 1
y1y2y3
=
110
(1)
[L]t {x} = {y} =⇒
1 −1 10 2 10 0 1
x1x2x3
=
y1y2y3
(2)
Del sistema (1), tenemos las siguientes ecuaciones:
y1 = 1−y1 + 2y2 = 1y1 + y2 + y3 = 0
=⇒
y1 = 1−1 + 2y2 = 1 =⇒ y2 = 11 + 1 + y3 = 0 =⇒ y3 = −2
Y del sistema (2), las que siguen a continuación, que es la solución al sistema,una vez hallado los términos del vector {y1, y2, y3}t :
x1 − x2 + x3 = 12x2 + x3 = 1x3 = −2
=⇒
x1 − 32 − 2 = 1 =⇒ x1 =
92
2x2 − 2 = 1 =⇒ x2 =32
x3 = −2
3

1 Aplicando el método de Jacobi.
Consiste en resolver la i-ésima ecuación de [A] {x} = {b}, para x en cierto no depasos iterativos k = 1, 2, 3, ...
El sistema iterativo es así:
1o) Se da una condición inicial: x(0) para todas las componentes del vector{x} .
2o) Se va obteniendo x(k) partiendo de x(k−1), mediante:
x(k)i =
n∑
j=1j �=i
(−aijx
(k−1)j
)+bi
aiipara i = 1, 2, .., n,
consiguiendo la solución del vector {x} .
3o) Podemos controlar la iteración de 2 formas:
• Definiendo un paso previo máximo:
k = kmax.
• Estableciendo el error relativo (%) de acuerdo a:
|ε| =‖x(k)−x(k−1)‖‖x(k)‖
· 100 < tol (%)
1

El método de Jacobi siempre converge si la matriz A es estrictamente dia-gonal dominante y puede converger incluso si esta condición no se satisface.Es necesario, sin embargo, que los elementos de la diagonal en la matriz seanmayores (en magnitud) que los otros elementos.
Comprobemos previamente las condiciones de convergencia:
1o) [A] es estrictamente diagonal dominante si cumple:
|aii| >n∑
j �=i
|aij |
Verificación:
Sea la matriz [A] =
4 −1 0−1 4 −10 −1 4
|a11| > |a12|+ |a13| =⇒ |4| > |−1|+ |0| =⇒ |4| > |1| (OK)|a22| > |a21|+ |a23| =⇒ |4| > |−1|+ |−3| =⇒ |4| > |4| (No OK)|a33| > |a31|+ |a32| =⇒ |4| > |0|+ |−1| =⇒ |4| > |1| (OK)
Por lo tanto, [A] no es estrictamente dominante. No obstante, puedeconverger aunque esta condición no se satisfaga.
2o) Existirá convergencia por Jacobi si en la matriz de coeficientes se verificasimultáneamente:
n∑
j �=i
∣∣∣aijaii
∣∣∣ < 1n∑
i�=j
∣∣∣aijaii
∣∣∣ < 1,
{i = 1, 2, ..., nj = 1, 2, ..., n
Comprobación den∑
j �=i
∣∣∣aijaii
∣∣∣ < 1:
|a12|+|a13|+|a21|+|a23|+|a31|+|a33||a11|+|a22|+|a33|
= |−1|+|0|+|−1|+|−3|+|0|+|4||4|+|4|+|4| = 9
12 < 1
Comprobación den∑
i�=j
∣∣∣aijaii
∣∣∣ < 1:
|a21|+|a31|+|a12|+|a32|+|a13|+|a23||a11|+|a22|+|a33|
= |−1|+|0|+|−1|+|−1|+|0|+|−3||4|+|4|+|4| = 6
12 < 1
2
Por lo tanto, el criterio de convergencia se cumple aun no siendo [A] unamatriz estrictamente dominante.
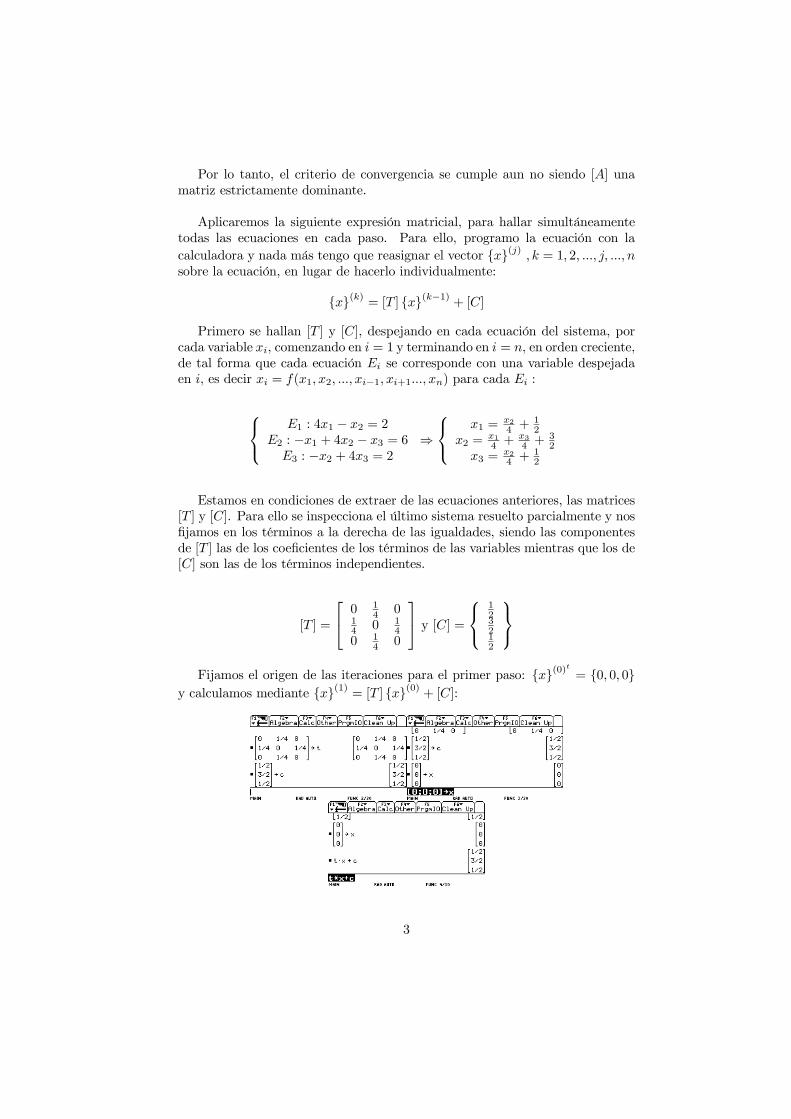
Aplicaremos la siguiente expresión matricial, para hallar simultáneamentetodas las ecuaciones en cada paso. Para ello, programo la ecuación con lacalculadora y nada más tengo que reasignar el vector {x}(j) , k = 1, 2, ..., j, ..., nsobre la ecuación, en lugar de hacerlo individualmente:
{x}(k) = [T ] {x}(k−1) + [C]
Primero se hallan [T ] y [C], despejando en cada ecuación del sistema, porcada variable xi, comenzando en i = 1 y terminando en i = n, en orden creciente,de tal forma que cada ecuación Ei se corresponde con una variable despejadaen i, es decir xi = f(x1, x2, ..., xi−1, xi+1..., xn) para cada Ei :
E1 : 4x1 − x2 = 2E2 : −x1 + 4x2 − x3 = 6E3 : −x2 + 4x3 = 2
⇒
x1 =x24 +
12
x2 =x14 +
x34 +
32
x3 =x24 +
12
Estamos en condiciones de extraer de las ecuaciones anteriores, las matrices[T ] y [C]. Para ello se inspecciona el último sistema resuelto parcialmente y nosfijamos en los términos a la derecha de las igualdades, siendo las componentesde [T ] las de los coeficientes de los términos de las variables mientras que los de[C] son las de los términos independientes.
[T ] =
0 1
4 014 0 1
40 1
4 0
y [C] =
123212
Fijamos el origen de las iteraciones para el primer paso: {x}(0)t
= {0, 0, 0}
y calculamos mediante {x}(1) = [T ] {x}(0) + [C]:
3

Sobre la solución {x}(1)t
={12 ,
32 ,
12
}, volvemos a aplicar la iteración {x}(2) =
[T ] {x}(1) + [C] resultando:
{x}(2)t
={78 ,
74 ,
78
}
Construimos la tabla de pasos sobre soluciones:
k 0 1 2 3 4 5 6 7 8 9 10
{x1}(k) 0 1
278
1516
6364
127128
511512
10231024
40954096
81918192
3276732768 = 0, 99997 ≃ 1
{x2}(k) 0 3
274
3116
6332
255128
511512
20471024
40952048
163838192
3276716384 = 1, 99994 ≃ 2
{x3}(k) 0 1
278
1516
6364
127128
511512
10231024
40954096
81918192
3276732768 = 0, 99997 ≃ 1
Los errores relativos porcentuales cometidos según las iteraciones son:
|εx1 | =
∣∣∣∣x(10)1 −x
(9)1
x(10)1
∣∣∣∣ · 100 = 0, 009 %
|εx2 | =
∣∣∣∣x(10)2 −x
(9)2
x(10)2
∣∣∣∣ · 100 = 0, 003 %
|εx3 | =
∣∣∣∣x(10)3 −x
(9)3
x(10)3
∣∣∣∣ · 100 = 0, 009 %
Y los errores relativos porcentuales según la última aproximación respecto ala solución real son:
|ǫx1 | =
∣∣∣∣x1−x
(10)1
x1
∣∣∣∣ · 100 = 0, 003%
|ǫx2 | =
∣∣∣∣x2−x
(10)2
x2
∣∣∣∣ · 100 = 0, 003 %
|εǫx3 | =
∣∣∣∣x3−x
(10)3
x3
∣∣∣∣ · 100 = 0, 003 %
4

2 Aplicando el método de Gauss-Seidel.
El método de Gauss-Seidel supone una mejora del de Jacobi. Lo que hace esmejorar la fórmula expresando cada ecuación de la siguiente forma:
x(k)i =
i−1∑
j=1
(−aijx
(k)j
)+
n∑
j=i+1
(−aijx
(k−1)j
)+bi
aii, con i = 1, 2, ..., n
donde la ec. anterior es parecida a la del método de Jacobi, si se desarrolla,salvo que en el primer sumatorio, la variable x está extendida al paso o iteraciónk, en lugar del k − 1.
Las condiciones del método de Gauss-Seidel, son las siguientes:
1o) [A] es simétrica.
En efecto, lo es, dado que [A] = [A]t
2o) La matriz [A] es definida positiva, es decir, cumple:
{x}t [A] {x} > 0
Verifiquemos que lo anterior es cierto:
{x1, x2, x3}t
4 −1 0−1 4 −10 −1 4
x1x2x3
= 4x21− 2x1x2+4x
22− 4x2x3+4x
23 =
=(x21 − 2x1x2 + x
22
)+ 3x21 +
(x22 − 4x2x3 + 4x
23
)+ 2x22 =
= (x1 − x2)2 + 3x21 + (x2 − 2x3)
2 + 2x22 > 0
Procedemos al cálculo. Primero se despejan las incógnitas x1, x2, x3 de lasecuaciones 1,2 y 3 respectivamente. Se tiene como antes por Jacobi:
x1 =x24 +
12
x2 =x14 +
x34 +
32
x3 =x24 +
12
Éstas serán las ecuaciones iterativas a usar:
• k = 0.
Se parte de {x}(0)t
= {0, 0, 0}
5

• k = 1.
Se calcula como sigue:
Ec.1: x2 = x3 = 0 =⇒ x1 =12
Ec.2: x1 = 12 , x3 = 0 =⇒ x2 =
138
Ec.3: x1 = 12 , x2 =
138 =⇒ x3 =
2932
• k = 2.
Siguiendo el sistema iterativo:
Ec.1: x2 = 138 , x3 =
2932 =⇒ x1 =
2932
Ec.2: x1 = 2932 , x3 =
2932 =⇒ x2 =
12564
Ec.3: x1 = 2932 , x2 =
12564 =⇒ x3 =
253256
...
Así, construimos la tabla de iteraciones, hasta k = 5:
k 0 1 2 3 4 5
{x1}(k) 0 1
22932
253256
20452048
1638116384 = 0, 99982 ≃ 1
{x2}(k) 0 13
812564
1021512
81894096
6553332768 = 1.99991 ≃ 2
{x3}(k) 0 29
32253256
20452048
1638116384
131069131072 = 0, 99998 ≃ 1
Los errores relativos porcentuales cometidos según las iteraciones son:
|εx1 | =
∣∣∣∣x(5)1 −x
(4)1
x(5)1
∣∣∣∣ · 100 = 0, 128 %
|εx2 | =
∣∣∣∣x(5)2 −x
(4)2
x(10)2
∣∣∣∣ · 100 = 0, 032 %
|εx3 | =
∣∣∣∣x(5)3 −x
(4)3
x(5)3
∣∣∣∣ · 100 = 0, 016 %
Y los errores relativos porcentuales según la última aproximación respecto ala solución real son:
|ǫx1 | =
∣∣∣∣x1−x
(5)1
x1
∣∣∣∣ · 100 = 0, 018%
|ǫx2 | =
∣∣∣∣x2−x
(5)2
x2
∣∣∣∣ · 100 = 0, 005 %
|εǫx3 | =
∣∣∣∣x3−x
(5)3
x3
∣∣∣∣ · 100 = 0, 023 %
6

Aplicaremos el método del gradiente conjugado. Se trata de un algoritmo
en el que se realizarán a lo sumo un no n de iteraciones.
La ecuación matricial es:
[A] {x} = {b} ⇐⇒
4 −1 0−1 4 −10 −1 4
x2x2x3
=
262
• Primer paso: k = 0
Definimos un vector inicial:
{x(0)
}T= {0, 0, 0}
Calculamos{d(0)
}:
{d(0)
}={r(0)
}= {b} − [A]
{x(0)
}=
=
262
−
4 −1 0−1 4 −10 −1 4
000
=
262
Calculamos ρ0 :
ρ0 =
{d(0)
}T {r(0)
}
{d(0)
}T[A]{d(0)
} =
{2, 6, 2}
262
{2, 6, 2}
4 −1 0−1 4 −10 −1 4
262
=11
32
• Segundo paso: k = 1 :
Definimos la iteración, calculando{x(1)
}:
1
{x(1)
}={x(0)
}+ ρ0
{d(0)
}=
000
+11
32
262
=
111633161116
Calculamos{r(1)
}:
{r(1)
}= {b} − [A]
{d(0)
}=
262
−
4 −1 0−1 4 −10 −1 4
262
=
2116−78
2116
Calculamos α0:
α0 = −
{r(1)
}T[A]{d(0)
}
{d(0)
}T[A]{d(0)
} =
{2116 ,−
78 ,
2116
}
4 −1 0−1 4 −10 −1 4
262
{2, 6, 2}
4 −1 0−1 4 −10 −1 4
262
= 49512
Calculamos{d(1)
}:
{d(1)
}={r(1)
}+ α0
{d(0)
}=
2116−78
2116
+ 49
512
262
=
385256− 77256385256
Calculamos ρ1 :
ρ1 =
{d(1)
}T {r(1)
}
{d(1)
}T[A]{d(1)
} =
{385256 ,−
77256 ,
385256
}
2116−78
2116
{385256 ,−
77256 ,
385256
}
4 −1 0−1 4 −10 −1 4
385256− 77256385256
=
1677
• Tercer paso: k = 2 :
Calculamos{x(2)
}:
{x(2)
}={x(1)
}+ ρ1
{d(1)
}=
111633161116
+ 16
77
385256− 77256385256
=
121
En este caso, hemos llegado a la solución exacta, usando números frac-
cionarios.
2

Antes de entrar a resolver el problema vamos a matizar el planteamientomatemático original de Newton. Como se sabe Newton y Taylor convivieronen la misma época, si bien Newton desarrolló su cálculo diferencial alrededorde 1.666 y en concreto se refirió a este método en 1.669. Aunque Newtonmurió en 1.727 y los trabajos del polinomio de Taylor se desarrollaron en 1.715,es claro que el planteamiento teórico dado en la asignatura referente al poli-nomio de Taylor de grado 2, suponiendo que dicho término es despreciable esun conocimiento posterior y aunque Newton lo pudo conocer en vida ya nose dedicó a estos menes-teres en ese tiempo. Newton pudo conocer los traba-jos del hindú Madhava of Sangamagrama para algunos tipos de series (algunasfunciones trigonométricas), aparte de los conocimientos de su maestro Barrow.
Es por ello que vamos a describir la forma de obtención del método medianteuna interpretación meramente geométrica, como alternativa.
Si por un punto de iteración xn trazamos la tangente a la curva, el nuevopunto de iteración se tomará como la abscisa en el origen de la tangente (puntode corte de la tangente con el eje X), que será xn+1. Esto es equivalente alinealizar la función, es decir, f se reemplaza por una recta tal que contiene alpunto (x0, f(x0)) y cuya pendiente coincide con la derivada de la función en elpunto, f ′(x0). En la nueva aproximación a la raíz, xn+1, se logra la intersecciónde la función lineal con el eje X de ordenadas.
En la siguiente figura se muestra la función f en azul, la recta tangente enrojo en el punto de la curva f , observando como tras sucesivas iteraciones, eneste caso, la iteración converge a la solución exacta x. Se observa además, comola aproximación a la solución xn+1 es mejor que la de xn.
1
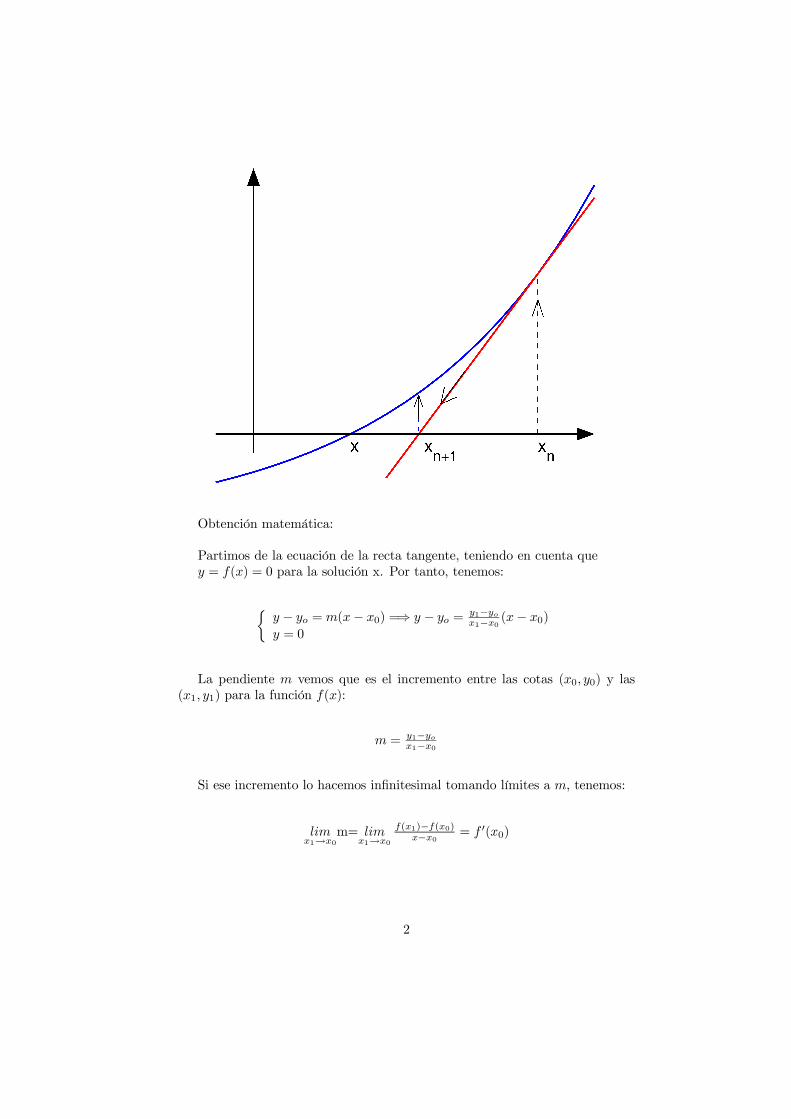
Obtención matemática:
Partimos de la ecuación de la recta tangente, teniendo en cuenta quey = f(x) = 0 para la solución x. Por tanto, tenemos:
{y − yo =m(x− x0) =⇒ y − yo =
y1−yox1−x0
(x− x0)
y = 0
La pendiente m vemos que es el incremento entre las cotas (x0, y0) y las(x1, y1) para la función f(x):
m = y1−yox1−x0
Si ese incremento lo hacemos infinitesimal tomando límites a m, tenemos:
limx1→x0
m= limx1→x0
f(x1)−f(x0)x−x0
= f ′(x0)
2

expresión que equivale a la derivada en un punto (se ha supuesto que x1 esuna variable genérica).
Tomando límites en la expresión de la recta tangente, se tiene:
{y − f(x0) = f
′(x0)(x1 − x0)y = 0
=⇒ 0− f(x0) = f′(x0)(x1 − x0) =⇒ x1 = x0 −
f(x0)f ′(x0)
Tomando sucesivas iteraciones, tenemos la sucesión:
xn+1 = xn −f(xn)f ′(xn)
que convergerá de acuerdo a unas condiciones precisas que las proporcionael siguiente teorema, ligeramente variado al del texto AF3-Cálculo Numérico,pero que dice lo mismo:
Teorema de Convergencia Local del Método de Newton.
Sea f ∈ C2 ([a, b]) (f es de clase 2 en el intervalo cerrado: existen todas lasderivadas parciales y son continuas en el intervalo). Si p ∈ [a, b], de tal formaque f(p) = 0 y f ′(p) = 0,entonces existe un δ > 0 tal que si |x0 − p| < δ,
entonces la sucesión xn con n ∈ ℵ verifica que |xn − p| < δ ∀ n y xn → p
cuando n→∞.Si además f ∈ C2 ([a, b]) , entonces la convergencia es cuadrática.
En definitiva, bajo suposiciones razonables, el método de Newton converjerási se escoje una aproximación inicial lo suficientemente acertada de acuerdo alteorema.
Procedemos al cálculo.
Sean las funciones obtenidas del sistema de ecuaciones no lineal:{
f1 (x1, x2) = x21 − 10x1 + x
22 + 8 = 0
f2 (x1, x2) = x1x22 + x1 − 10x2 + 8 = 0
Tomamos el valor inicial {x}(0)= {x1, x2}
(0)= {0, 0} .
Calculamos la matriz jacobiana:
3

[J(x)] =
[∂f1(x1,x2)
∂x1
∂f1(x1,x2)∂x2
∂f2(x1,x2)∂x1
∂f2(x1,x2)∂x2
]
=
[2x1 − 10 2x2x22 + 1 2x1x2 − 10
]
Se ejecutan los dos pasos del algoritmo de cálculo:
1o) J({x}
(m)){∆x}(m) = −{f (x)}
(m)=⇒
=⇒
2x
(m)1 − 10 2x
(m)2(
x(m)2
)2+ 1 2x
(m)1 x
(m)2 − 10
{∆x
(m)1
∆x(m)2
}
=
= −
(x(m)1
)2− 10x
(m)1 +
(x(m)2
)2+ 8
x(m)1
(x(m)2
)2+ x
(m)1 − 10x
(m)2 + 8
2o)
{x1x2
}(m+1)=
{x1x2
}(m)+
{∆x
(m)1
∆x(m)2
}
Para el primer valor m se ha dicho que vale:
x(0)1 = 0, x
(0)2 = 0
Paso 1.1:
2x
(0)1 − 10 2x
(0)2(
x(0)2
)2+ 1 2x
(0)1 x
(0)2 − 10
{∆x
(0)1
∆x(0)2
}
=
= −
(x(0)1
)2− 10x
(0)1 +
(x(0)2
)2+ 8
x(0)1
(x(0)2
)2+ x
(0)1 − 10x
(0)2 + 8
=⇒
[−10 01 −10
]{∆x
(0)1
∆x(0)2
}
= −
{88
}
Cuya solución es:
{∆x
(0)1 = 4
5
∆x(0)2 = 22
25
Paso 2.1:
4
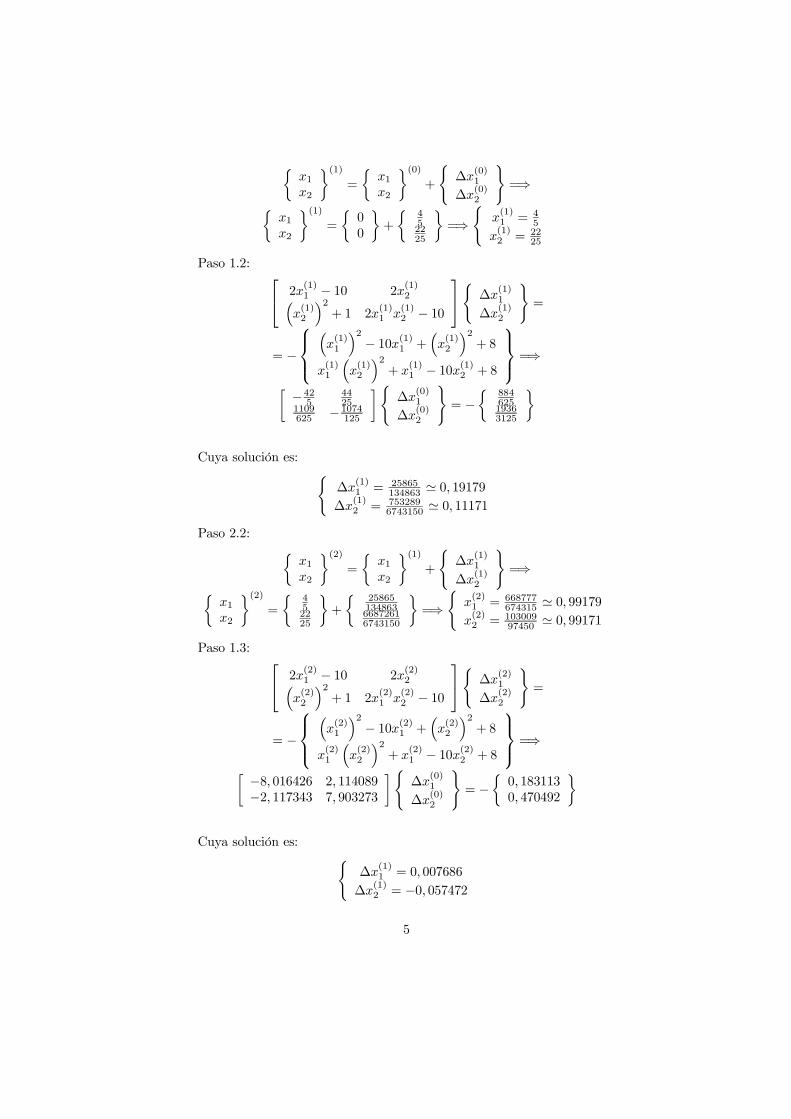
{x1x2
}(1)=
{x1x2
}(0)+
{∆x
(0)1
∆x(0)2
}
=⇒
{x1x2
}(1)=
{00
}+
{452225
}=⇒
{x(1)1 = 4
5
x(1)2 = 22
25
Paso 1.2:
2x
(1)1 − 10 2x
(1)2(
x(1)2
)2+ 1 2x
(1)1 x
(1)2 − 10
{∆x
(1)1
∆x(1)2
}
=
= −
(x(1)1
)2− 10x
(1)1 +
(x(1)2
)2+ 8
x(1)1
(x(1)2
)2+ x
(1)1 − 10x
(1)2 + 8
=⇒
[−42
54425
1109625 −1074
125
]{∆x
(0)1
∆x(0)2
}
= −
{88462519363125
}
Cuya solución es:{∆x
(1)1 = 25865
134863 ≃ 0, 19179
∆x(1)2 = 753289
6743150 ≃ 0, 11171
Paso 2.2:
{x1x2
}(2)=
{x1x2
}(1)+
{∆x
(1)1
∆x(1)2
}
=⇒
{x1x2
}(2)=
{452225
}+
{2586513486366872616743150
}=⇒
{x(2)1 = 668777
674315 ≃ 0, 99179
x(2)2 = 103009
97450 ≃ 0, 99171
Paso 1.3:
2x
(2)1 − 10 2x
(2)2(
x(2)2
)2+ 1 2x
(2)1 x
(2)2 − 10
{∆x
(2)1
∆x(2)2
}
=
= −
(x(2)1
)2− 10x
(2)1 +
(x(2)2
)2+ 8
x(2)1
(x(2)2
)2+ x
(2)1 − 10x
(2)2 + 8
=⇒
[−8, 016426 2, 114089−2, 117343 7, 903273
]{∆x
(0)1
∆x(0)2
}
= −
{0, 1831130, 470492
}
Cuya solución es:{
∆x(1)1 = 0, 007686
∆x(1)2 = −0, 057472
5
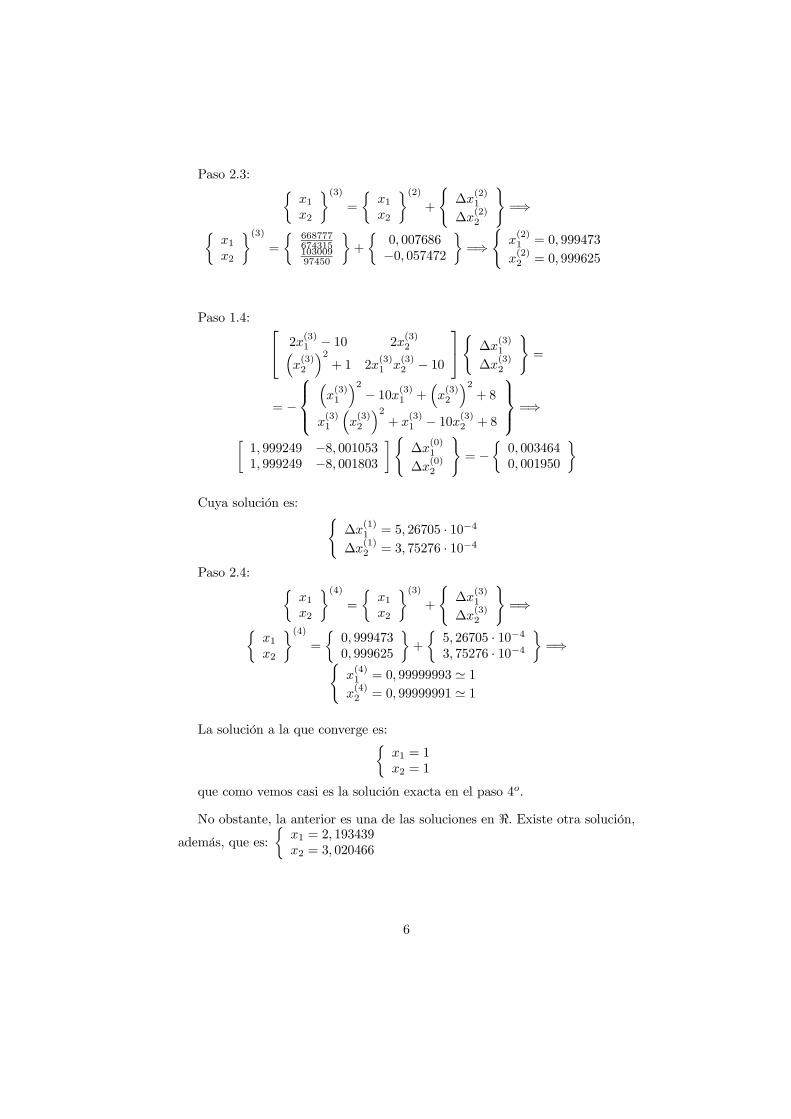
Paso 2.3:{x1x2
}(3)=
{x1x2
}(2)+
{∆x
(2)1
∆x(2)2
}
=⇒
{x1x2
}(3)=
{66877767431510300997450
}+
{0, 007686−0, 057472
}=⇒
{x(2)1 = 0, 999473
x(2)2 = 0, 999625
Paso 1.4:
2x
(3)1 − 10 2x
(3)2(
x(3)2
)2+ 1 2x
(3)1 x
(3)2 − 10
{∆x
(3)1
∆x(3)2
}
=
= −
(x(3)1
)2− 10x
(3)1 +
(x(3)2
)2+ 8
x(3)1
(x(3)2
)2+ x
(3)1 − 10x
(3)2 + 8
=⇒
[1, 999249 −8, 0010531, 999249 −8, 001803
]{∆x
(0)1
∆x(0)2
}
= −
{0, 0034640, 001950
}
Cuya solución es:{∆x
(1)1 = 5, 26705 · 10−4
∆x(1)2 = 3, 75276 · 10−4
Paso 2.4:{x1x2
}(4)=
{x1x2
}(3)+
{∆x
(3)1
∆x(3)2
}
=⇒
{x1x2
}(4)=
{0, 9994730, 999625
}+
{5, 26705 · 10−4
3, 75276 · 10−4
}=⇒
{x(4)1 = 0, 99999993 ≃ 1
x(4)2 = 0, 99999991 ≃ 1
La solución a la que converge es:{x1 = 1x2 = 1
que como vemos casi es la solución exacta en el paso 4o.
No obstante, la anterior es una de las soluciones en ℜ. Existe otra solución,
además, que es:
{x1 = 2, 193439x2 = 3, 020466
6