universidad regional autÓnoma de los...
TRANSCRIPT

UNIVERSIDAD REGIONAL AUTÓNOMA DE LOS ANDES
“UNIANDES”
Facultad de Sistemas Mercantiles
Carrera de Sistemas
Tesis de grado previo a la obtención del título de
Ingeniero en Sistemas e Informática.
Tema: Robot Humanoide autómata programado para contribuir al
desarrollo de aplicaciones tecnológicas en Uniandes Tulcán.
AUTOR: Bolaños Benavides Johny Fernando
TUTOR: Ing. Fred Carrera. Mgs.
Tulcán – Ecuador
2015
II
III
IV
DEDICATORIA:
A Dios, por haberme brindado una verdadera fuente de
amor y sabiduría para lograr todas las metas
propuestas.
A mi Padre porque gracias a él sé que la
responsabilidad se la debe vivir como un compromiso
de dedicación y esfuerzo, por el valor mostrado para
cumplir todos los objetivos, por toda la motivación a
cada instante que ha permitido ser una persona
responsable.
A mi Madre por haberme brindado siempre su cariño y
apoyo incondicional a cada momento sin importar
nuestras diferencias de opiniones, y por siempre estar
dispuesta a escucharme y ayudarme en cualquier
momento.
A mi hermano por estar siempre presente en los buenos
y malos momentos cuando prácticamente nos hemos
rendido y tirado la toalla en el objetivo de alguna meta.

V
AGRADECIMIENTO
Con el presente trabajo de tesis primeramente quiero agradecer con un inmenso
sentido de gratitud y reconocimiento a la Universidad Autónoma de los Andes
“UNIANDES”, Facultad de Sistemas Mercantiles, Escuela de Sistemas e
Informática, por darme la oportunidad de estudiar y ser un profesional al canciller
Dra. Corona Gómez, y por su intermedio a todo el cuerpo docente los mismos que,
con sabiduría supieron conducirnos hasta culminar este valioso proceso. Un
agradecimiento especial al Dr. Alex Cruz, Director de la Universidad Autónoma de
los Andes “UNIANDES” extensión Tulcán y al Ingeniero Fred Carrera que como
docente y Asesor, ha ayudado exitosamente, proporcionando sus excelentes
conocimientos para la realización de la presente Tesis.
Atentamente
Johny Bolaños.

VI
RESUMEN EJECUTIVO
En el presente trabajo de investigación está orientado a contribuir al desarrollo de
aplicaciones tecnológicas mediante un robot humanoide autómata programado en
Uniandes Tulcán.
La línea de investigación reguladora del presente trabajo de tesis pertenece a la
automatización y control de la robótica presente en el manual de tesis de la
universidad Uniandes.
La presente investigación consta con tres capítulos, en el primer capítulo se
desarrolló el marco teórico que consiste en aplicar los conceptos, leyes y
esenciales como material de consulta en el desarrollo del conocimiento científico
para contribuir a la solución del problema planteado, aquí también se encuentran
los objetivos y la justificación del problema.
En el segundo capítulo se desarrolla el marco metodológico y planteamiento del
problema al cual la investigación en las modalidades de campo y explicativa con la
aplicación de métodos empíricos, analítico, sintético, inductivo–deductivo y
sistémico pretende dar la respectiva solución al problema planteado, también se
ha implementado una investigación de campo y explicativa como la encuesta a los
estudiantes de la carrera de sistemas informáticos de la universidad Uniandes
extensión Tulcán para finalmente realizar el análisis e interpretación de datos
obtenidos que constituyen un componente fundamental en el desarrollo del
trabajo de grado.
En el tercer capítulo se lleva a cabo el desarrollo de la propuesta con lo cual se
concluye el trabajo investigativo que consiste en el diseño de un robot Humanoide
Mindstorms EV3, para las respectivas pruebas de funcionamiento se utilizó un
software y se obtuvo los resultados esperados.
VII
EXECUTIVE SUMMARY
In the present work of investigation humanoid is orientated to contribute to the
development of technological applications by means of a robot automaton
programmed in Uniandes Tulcán.
The line of regulatory investigation of the present work of thesis belongs to the
automation and control of the present robotics in the manual of thesis of the
university Uniandes.
The present investigation consists with three chapters, in the first chapter there
developed the theoretical frame that consists of applying the concepts, laws and
essential as material of consultation in the development of the scientific knowledge
to contribute to the solution of the raised problem, here also they find the aims and
the justification of the problem.
In the second chapter there develops the methodological frame and exposition of
the problem to which the investigation in the field modalities and explanatory with
the application of empirical methods, analytical, synthetic, inductive - deductive and
systemic it tries to give the respective solution to the raised problem, also an
explanatory field investigation has been implemented and as the survey to the
students of the career of IT systems of the university Uniandes extension Tulcán
finally to realize the analysis and interpretation of obtained information that
constitute a fundamental component in the development of the work of degree.
In the third chapter the development of the offer is carried out with which one
concludes the work of investigation that there consists of the design of a robot
Humanoid Mindstorms EV3, for the respective tests of functioning a software was
in use and the awaited results were obtained.

VIII
ÍNDICE GENERAL
Constancia de certificación por parte del tutor………….……………………….
¡Error! Marcador no definido.
Declaración de autoría .............................................¡Error! Marcador no definido.
Dedicatoria: ........................................................................................................... IV
Agradecimiento ...................................................................................................... V
Resumen ejecutivo................................................................................................ VI
Executive summary .............................................................................................. VII
Introducción. ...................................................................................................... - 1 -
Planteamiento del Problema. ............................................................................. - 2 -
Formulación del problema. ................................................................................. - 2 -
Objeto de Estudio y Campo de Acción. .............................................................. - 3 -
Objeto de Estudio. ............................................................................................. - 3 -
Objetivos. ........................................................................................................... - 3 -
Objetivo General............................................................................................. - 3 -
Objetivos Específicos: .................................................................................... - 3 -
Variables ............................................................................................................ - 4 -
Variable Independiente. ..................................................................................... - 4 -
Variable Dependiente. .................................................................................... - 4 -
Métodos, Técnicas y Herramientas de Investigación.......................................... - 5 -
Métodos Empíricos ......................................................................................... - 5 -
Técnicas de Investigación. ................................................................................. - 7 -
Metodología de Desarrollo de la Robótica. ......................................................... - 7 -
Aporte Teórico, Significación Práctica y Novedad .............................................. - 9 -
Aporte Teórico ................................................................................................... - 9 -
Capitulo I Marco Teorico ..……….…………………………………………………….11
1.1 Origen y evolución de los procesos Informáticos. ................................... - 11 -
IX
1.2 Análisis de las distintas posiciones teóricas sobre Procesos informáticos. . - 13 -
1.2.1 Procesos informáticos. ............................................................................ - 13 -
1.2.2 Automatización y Robótica. ..................................................................... - 14 -
1.2.2.1 Automatización. ................................................................................... - 14 -
1.2.2.1.1 Objetivos de la automatización ...................................................... - 15 -
1.2.2.2 Sistemas de Control ......................................................................... - 15 -
1.2.2.3 Robótica. .............................................................................................. - 17 -
1.2.2.3.1 Definición. ......................................................................................... - 17 -
1.2.2.3.2 Leyes de la Robótica ........................................................................ - 18 -
1.2.3.2 Clasificación de los robots ................................................................ - 18 -
1.2.3.3 Por Generación................................................................................. - 18 -
1.2.3.3.1 Primera Generación- Manipuladores ............................................. - 19 -
1.2.3.3.2 Segunda Generación- Robots de Aprendizaje ............................... - 19 -
1.2.3.3.3 Tercera Generación- Robots con Control Sensorizado ................. - 19 -
1.2.4 Componentes del robot ........................................................................... - 20 -
1.2.4.1 Sensores .............................................................................................. - 20 -
1.2.4.1.1 Características de los sensores ..................................................... - 21 -
1.2.4.2 Tipos de sensores ............................................................................ - 21 -
1.2.4.2.1 Sensores de Contacto ................................................................... - 21 -
1.2.4.2.2 Sensor Infrarrojo. ........................................................................... - 22 -
1.2.4.2.3 Sensores de Temperatura. ............................................................ - 22 -
1.2.4.2 Actuadores ........................................................................................... - 23 -
1.2.4.3 Servomotor........................................................................................... - 24 -
Capitulo II Marco Metodológico……………………………………………………….27
2.2 Descripción del procedimiento metodológico para el desarrollo de la
investigación .................................................................................................... - 27 -
2.2.2 Tipos de Investigación. ............................................................................ - 28 -
2.2.2.1 Investigación Bibliográfica ................................................................ - 28 -
2.2.2.2 Investigación Aplicada ...................................................................... - 28 -
2.2.2.3 Investigación Descriptiva. ................................................................. - 28 -
2.2.2.4 Investigación de Campo. .................................................................. - 29 -
2.2.3.1 Métodos de Investigación. ................................................................ - 29 -

X
2.2.3.1.2 Métodos Teóricos .......................................................................... - 30 -
2.2.4 Metodología de Desarrollo de la Robótica. ............................................. - 31 -
2.2.5 Técnicas de investigación. ...................................................................... - 33 -
2.2.7 Población y Muestra ................................................................................ - 33 -
2.3 Conclusiones Parciales del Capítulo II. ...................................................... - 39 -
Capitulo III Desarrollo de la propuesta ……………………………………………….40
3.2 Antecedentes de la Propuesta ................................................................... - 40 -
3.4. Caracterización de la Propuesta ............................................................... - 41 -
3.5. Planteamiento detallado de la Propuesta. ................................................. - 42 -
3.5.1. Descripción del Sistema Actual. ............................................................. - 42 -
3.6.1 Diagrama de requerimientos de la propuesta. ......................................... - 43 -
3.7 Implementación .............................................................................................. 50
3.7.1. Herramientas de Acción ............................................................................. 51
3.7.2 Herramientas de Control de Flujo ............................................................... 51
3.7.3. Sensores .................................................................................................... 52
3.7.4. Herramientas para Operaciones con Datos ................................................ 52
3.7.5. Herramientas de Control Avanzado ............................................................ 53
3.8 Pruebas......................................................................................................... 54
Conclusiones Generales ...................................................................................... 63
Recomendaciones ............................................................................................... 64
BIBLIOGRAFÍA .................................................................................................... 65
ANEXOS .............................................................................................................. 67
XI
ÍNDICE DE TABLAS
Tabla N° 1………………………………………………………………..32
Tabla N° 2………………………………………………………………..33
Tabla N° 3………………………………………………………………..34
Tabla N° 4………………………………………………………………..35
Tabla N° 5………………………………………………………………..35
Tabla N° 6………………………………………………………………..36
Tabla N° 7………………………………………………………………..37
Tabla N° 8………………………………………………………………..37
Tabla N° 9………………………………………………………………..41
Tabla N° 10……………………………………………………………....56
Tabla N° 11……………………………………………………………....57
Tabla N° 12……………………………………………………….……...58
Tabla N° 13……………………………………………………….….…..58
Tabla N° 14………………………………………………………..……..59

XII
ÍNDICE DE GRÁFICOS
Gráfico Nn°1……………………………………………….………..……..43
Gráfico N°2………………………………………………………………..44
Gráfico N°3………………………………………………………………..44
Gráfico N°4………………………………………………………………..45
Gráfico N°5………………………………………………………………..46
Gráfico N°6……………………………………………………………..…46
Gráfico N°7………………………………………………………………..47
Gráfico N°8………………………………………………………………..47
Gráfico N°9………………………………………………………………..48
Gráfico N° 10……………………………………………………………...48
Gráfico N°11……………………………………………………………....49
Gráfico N°12……………………………………………………………....50
Grafico N° 13………………………………………………………….......50
Gráfico N° 14………………………………………………………….......50
Gráfico N° 15………………………………………………..…………….51
Gráfico N° 16………………………………………………..…………….51
Gráfico N° 17……………………………………………………….……..52
Gráfico N° 18……………………………………………………………...52
Gráfico N° 19……………………………………………………………...53
Gráfico N° 20……………………………………………………………...54

- 1 -
INTRODUCCIÓN.
Antecedentes Investigativos
A lo largo de la historia el hombre se ha fascinado por máquinas que imitan el
movimiento del hombre. A estas máquinas los griegos las denominaban
autómatos. De esta palabra deriva la palabra autómata: Maquina que imita la
figura y los movimientos de un ser animado.
La cultura árabe heredó y difundió los conocimientos griegos, utilizándolos no sólo
para mecanismos aplicados a la diversión, sino que le dio una aplicación práctica,
introduciéndolos en la vida cotidiana de la realeza.
Los robots hoy en día son en su mayoría excesivamente caros y su función está
muy especializada, por lo que, los estudios actuales se centran en conseguir que
sean más generales y económicos, de tal manera que sean accesibles a todas las
personas que quieran resolver cualquier problema en sus tareas cotidianas.
Debido a los avances tecnológicos actuales, construir un robot es posible y se lo
viene realizando en universidades y actualmente en compañía de juguetes, la
industria como tal no es única que se ha beneficiado con la aparición de los
robots, ya que existen áreas como: la medicina aeronáutica y agricultura que
también se han beneficiado.
Luego de realizar una investigación sobre el tema de tesis se han encontrado
algunos proyectos investigativos en el campo de la robótica, en la biblioteca de la
universidad UNIANDES Tulcán, existe como por ejemplo la tesis del señor Diego
Francisco Rosales Almeida con el tema “Robot autónomos controlados por
sensores, que faciliten el proceso de enseñanza-aprendizaje de robótica en la
carrera e sistemas e informática de Uniandes Tulcán” lo cual facilito a los
estudiantes de la universidad el conocimiento de este tipo de tecnologías usadas
en la creación de robots.
- 2 -
Planteamiento del Problema.
Actualmente dentro de la Universidad Uniandes extensión Tulcán no cuenta con
un área de robótica ni un laboratorio para realizar un análisis, diseño y simulación
de robots dentro de la universidad no se ha creado ni manipulado un robot, capaz
de realizar movimientos versátiles y precisos que pueda ser utilizado para realizar
diversas labores requeridas en nuestro medio, con cierta capacidad sensorial de
reconocimiento y capaz de realizar tareas automáticamente.
El autómata programable nació como solución al control de circuitos complejos de
automatización. Por lo tanto se puede decir que un autómata programable no es
más que un aparato electrónico que sustituye los circuitos auxiliares o de mando
de los sistemas automáticos. A él se pueden conectar los sensores por una parte,
y los actuadores por otra.
Por tal motivo se desarrollara un robot humanoide autómata programado, para con
ello elevar el avance tecnológico en la universidad Uniandes.
Formulación del problema.
¿Cómo contribuir al desarrollo de aplicaciones tecnológicas en la carrera de
Sistemas en Uniandes Tulcán?
Delimitación del Problema.
Lugar.
El lugar en donde se desarrollará el presente trabajo investigativo, es la
Universidad Autónoma de los Andes “Uniandes” extensión Tulcán ubicada en el
sector de Santa Rosa de Taques sector sur.
Tiempo.
Todo el proceso investigativo, se realizara en el periodo comprendido entre
octubre y diciembre del 2014, en el campo de la Robótica.

- 3 -
Objeto de Estudio y Campo de Acción.
Objeto de Estudio.
Procesos Informáticos.
Campo de Acción.
Robótica.
Línea de Investigación.
Automatización y Control.
Objetivos.
Objetivo General.
Implementar un robot humanoide autómata programado que contribuya al
desarrollo de aplicaciones tecnológicas en la carrera de Sistemas en Uniandes
Tulcán.
Objetivos Específicos:
Sistematizar la información referente al robot humanoide autómata programado
y el desarrollo de aplicaciones tecnológicas en el área de Sistemas.
Diagnosticar la situación actual del desarrollo de aplicaciones tecnológicas en
la carrera de Sistemas en Uniandes Tulcán.
Determinar los elementos constitutivos para el desarrollo del robot humanoide
autómata programado.
Validar la propuesta por la vía de expertos.

- 4 -
Idea a Defender.
Con el desarrollo de un robot humanoide autómata programado se va a contribuir
al perfeccionamiento de la automatización de procesos de inteligencia artificial así
como el perfeccionamiento del uso de la robótica dentro de Universidad Uniandes,
permitiendo así el uso de nuevas tecnologías utilizadas para la implementación del
robot, además de aportar los conocimientos adquiridos a los estudiantes de la
Universidad.
Variables
Variable Independiente.
Robot humanoide autómata programado.
Variable Dependiente.
Desarrollo de aplicaciones tecnológicas en el área de sistemas.
Justificación del tema
La importancia de la implementación de un Robot Humanoide autómata
programado es la de contribuir con el desarrollo de aplicaciones tecnológicas en el
área de sistemas, La necesidad para realizar este proyecto está basada en que la
Universidad Uniandes tenga un buen desarrollo de aplicaciones Tecnológicas ya
que esto tendrá una alta competitividad tecnológica, además de aportar los
conocimientos adquiridos a los estudiantes de la Universidad Uniandes.
Mediante el desarrollo de la presente tesis de grado los beneficiarios serán tanto
como personal administrativo, docentes y estudiantes de la Universidad porque
tendrán un alto nivel académico y de calidad.
- 5 -
Métodos, Técnicas y Herramientas de Investigación.
Métodos de Investigación.
Los métodos que se van a utilizar en el desarrollo de la presente tesis son
Empíricos y Teóricos.
Métodos Empíricos
Es un modelo de investigación científica, que se basa en las ciencias descriptivas,
es el más usado en el campo de las ciencias sociales y en las ciencias naturales.
Los métodos a utilizarse en la elaboración de la presente tesis son:
Observación Científica.
Porque es un elemento fundamental; en todo proceso investigativo, para obtener
el mayor número de información, observando la estructura, funcionamiento
clasificando y resumiendo los datos, ya que gran parte del conocimiento que
constituye la ciencia ha sido lograda mediante la observación.
Validación por la Vía de Expertos
Este método es aplicable en la tesis porque permite consultar a un conjunto de
expertos para validar la propuesta sustentada en sus conocimientos,
investigaciones, experiencia, estudios bibliográficos, etc. Da la posibilidad a los
expertos de analizar el tema con tiempo sobre todo si no hay posibilidades de que
lo hagan de manera conjunta.
Métodos Teóricos
A través de los métodos teóricos se logra descubrir la esencia del objeto
investigado y sus interrelaciones, ya que no se puede llegar a ella mediante la
percepción. Por ello se apoya básicamente en los procesos de abstracción,
análisis, síntesis, inducción y deducción.
Entre los métodos teóricos que se destacan en la realización de la presente tesis
son:

- 6 -
Método Analítico – Sintético
Este método implica el análisis y la síntesis, es decir la separación de un todo en
sus partes o en sus elementos constitutivos, y la segunda implicando la unión de
elementos para formar un todo. En la tesis de grado optaremos por descomponer
y distinguir los elementos de un todo y revisar ordenadamente cada uno de ellos
por separado para descubrir los distintos elementos que lo componen como las
causas y los efectos.
Método Inductivo – Deductivo.
En términos muy generales, consiste en establecer enunciados universales ciertos
a partir de la experiencia, esto es, ascender lógicamente a través del conocimiento
científico, desde la observación de los fenómenos o hechos de la realidad la ley
universal que los contiene. Es por eso que este método será utilizable en la tesis,
porque parte de un marco general de referencia y se va hacia un caso en
particular.
Histórico – Lógico.
Se va a utilizar este método en la presente tesis porque el método histórico real
es reflejado en forma mediatizada con toda su objetividad, complejidad y
contradicciones. El pensamiento a través de lo lógico refleja lo histórico en forma
esencial, con lo que reproduce la esencia del objeto y la historia de su desarrollo
en un sistema de abstracciones. Lo histórico, con referencia a lo lógico, es lo
primario; la lógica refleja los momentos y consideraciones fundamentales de la
historia.
Método Sistémico.
Es importante utilizar este método en la tesis porque permite relacionar hechos
aparentemente aislados y se formula una teoría que unifica los diversos
elementos.

- 7 -
Técnicas de Investigación.
Encuesta.
Instrumentos De Investigación.
Para la Encuesta se aplica el Cuestionario o Test.
Metodología de Desarrollo de la Robótica.
La metodología de desarrollo de la robótica a emplear es la orientada a
automatización y control, la misma que tiene las siguientes fases o etapas:
Análisis Orientada a procesos autómatas
Porque es una metodología de análisis que examina los requisitos desde la
perspectiva de tener la capacidad de implementar un agente no vivo, que se
encuentran en el vocabulario del dominio del problema. El Análisis orientado a
procesos autómatas ofrece un enfoque muy tecnológico para el análisis de
requisitos de sistemas robots, ya que mediante estos se pueden analizar procesos
robóticos mediante sensores físicos y sensores mecánicos en máquinas, pulsos
eléctricos u ópticos en computadoras, tanto como por entradas y salidas de bits de
un software y su entorno.
Diseño de procesos robóticos
Se utilizará esta metodología ya que permite manipular la actividad de concepción,
creación y puesta en funcionamiento, con fines industriales y pedagógicos, de
objetos tecnológicos que son reproducciones reducidas muy fieles y significativas
de los procesos y herramientas robóticos que son usados cotidianamente, sobre
todo, en el medio actual.
Diseño de sistemas robots
Es importante utilizar este tipo de sistemas en la presente tesis ya que son un
sistema electromecánico, dotado de sensores y actuadores para realizar
actividades de tipo industrial, con un sistema de control y capacidad de decisión
- 8 -
que le permite realizar tareas automáticas o autónomas, dependiendo de su grado
de versatilidad y complejidad.
Construcción del Robot
Permite documentar la construcción del robot humanoide e incluir los comentarios
que expliquen tanto cómo y por qué se utilizó cierto procedimiento conforme se
codifico de cierta forma. La documentación es esencial para poder realizar
prácticas con el robot y el mantenimiento una vez que la aplicación se ha puesto
en marcha.
Pruebas
El objetivo principal es ejercitar profundamente el sistema autómata, comprobando
la integración del funcionamiento del robot humanoide globalmente, verificando el
funcionamiento correcto de las interfaces entre los distintos procesos que lo
componen y con el resto de sistemas con los que se comunica.
Descripción de la Estructura de la Tesis
Estructura de la Tesis
Portada de la Tesis
Página con Certificación del Tutor
Página con Declaración de Auditoria de la Tesis
Página de Dedicatoria
Página de Agradecimiento
Índice General
Página Resumen Ejecutivo
Introducción
Antecedentes de la Investigación.
Planteamiento del Problema.
Formulación del Problema.
Objeto de Investigación y Campo de Acción.
- 9 -
Identificación de la Línea de Investigación.
Objetivos: Objetivo General y Objetivos Específicos.
Idea a Defender
Breve explicación de la Metodología investigativa a emplear.
Resumen de la Estructura de la Tesis: Breve explicación de los capítulos de la
tesis.
Elementos de novedad, aporte teórico y significación practica en dependencia
del alcance de la tesis.
Capítulo I. Marco Teórico.
Capítulo II. Marco Metodológico y Planteamiento de la Propuesta.
Capítulo III. Desarrollo de la Propuesta.
Conclusiones Generales.
Recomendaciones.
Bibliografía.
Anexos
Aporte Teórico, Significación Práctica y Novedad
Aporte Teórico
El aporte teórico de la presente tesis de grado es el desarrollo e implementación
de un robot humanoide autómata programado, con los diferentes elementos y
conceptos que componen el robot autómata por medio de la manipulación de
automatización, control, electrónica y robóticas, con su respectivo manual de
información y guía para el usuario.
Significación Práctica
La robótica en la actualidad es muy necesaria para la automatización de procesos
presentes en la vida cotidiana. La robótica ha abierto una nueva etapa en los
procesos de mecanización y automatización de los procesos de producción, ya
que gracias a ella se ha podido sustituir personas, máquinas o sistemas capaces
- 10 -
de automatizar operaciones concretas, por dispositivos mecánicos de uso general
dotados de varios grados de libertad que son capaces de adaptarse a la
automatización de un número muy variado de procesos u operaciones. La
significación práctica aplicada en la presente tesis seria al aporte de la
automatización y control del robot autómata programado de transporte de objetos
es decir la simulación de transporte con objetos, mediante la programación.
Novedad
El presente trabajo de investigación es novedoso, porque presenta un robot
humanoide autómata programado que sirva en el campo industrial mediante el uso
de nuevas tecnologías como el control autómata que en la actualidad es una de
las más usadas dentro de la robótica para la simulación de movimientos, así como
la implementación de un sistema electrónico de control, en el que se integra un
procesador como “cerebro” del sistema. Esta disposición, permite la programación
y el control de los movimientos, así como la memorización de diversas secuencias
de trabajo, dotando al robot de una gran flexibilidad y posibilita su adaptación a la
simulación de un humano. Este tipo de iniciativas científicas no hacen más que
recordar lo rápidamente que avanza la tecnología.
- 11 -
CAPÍTULO I MARCO TEÓRICO.
1.1 Origen y evolución de los procesos Informáticos.
El origen de las máquinas de calcular está dado por el ábaco chino, éste era una
tablilla dividida en columnas en la cual la primera, contando desde la derecha,
correspondía a las unidades, la siguiente a la de las decenas, y así
sucesivamente. A través de sus movimientos se podía realizar operaciones de
adición y sustracción.
La evolución de la informática lo situamos en el siglo XVII, donde el científico
francés Blas Pascal inventó una máquina calculadora. Ésta sólo servía para hacer
sumas y restas, pero este dispositivo sirvió como base para que el alemán
Leibnitz, en el siglo XVIII, desarrollara una máquina que, además de realizar
operaciones de adición y sustracción, podía efectuar operaciones de producto y
cociente. Ya en el siglo XIX se comercializaron las primeras máquinas de calcular.
En este siglo el matemático inglés Babbage desarrolló lo que se llamó "Máquina
Analítica", la cual podía realizar cualquier operación matemática. Además disponía
de una memoria que podía almacenar 1000 números de 50 cifras y hasta podía
usar funciones auxiliares, sin embargo seguía teniendo la limitación de ser
mecánica.
Primera generación
Las computadoras fueron desarrollándose conforme ha pasado el tiempo,
expresa: “Eran de un tamaño tan grande que ocupaban espaciosos salones en las
universidades donde fueron desarrolladas.” Y es que su capacidad de
almacenamiento en la memoria era muy reducida, como en el caso de la ENIAC
que almacenaba 1kB, sumamente pequeño para los que se conoce en la
actualidad (López, 1997, pág. 12).
- 12 -
Segunda generación
En 1958 comienza la segunda generación cuyas máquinas empleaban circuitos
transistorizados. El transistor es un elemento electrónico que permite reemplazar
al tubo con las siguientes ventajas: su consumo de corriente es mucho menor con
lo que también es menor su producción de calor. Su tamaño es también mucho
menor. Un transistor puede tener el tamaño de una lenteja mientras que un tubo
de vacío tiene un tamaño mayor que el de un cartucho de escopeta de caza. Esto
permite una drástica reducción de tamaño.. Como podemos ver el simple hecho
de pasar del tubo de vacío al transistor supone un gran paso en cuanto a
reducción de tamaño y consumo y aumento de fiabilidad. Las máquinas de la
segunda generación emplean además algunas técnicas avanzadas no sólo en
cuanto a electrónica sino en cuanto a informática y proceso de datos como por
ejemplo los lenguajes de alto nivel.
Tercera generación
Lo siguiente fue la integración a gran escala de transistores en microcircuitos
llamados procesadores o circuitos integrados monolíticos LSI, así como la
proliferación de lenguajes de alto nivel y la introducción de sistemas operativos.
Cuarta generación
En esta generación ya aparece el chip, se crea el primer microprocesador o Chip
de 4 bit, que en un espacio de aproximadamente 4 x 5 mm contenía 2250
transistores. Este primer microprocesador fue bautizado como el 4004.
“Esta generación se caracterizó por grandes avances tecnológicos realizados en
un tiempo muy corto. En 1977 aparecen las primeras microcomputadoras, entre
las cuales, las más famosas fueron las fabricadas por Apple Computer, Radio
Shack y Commodore Business Machines.” (García, 1997, pág. 30)
Prosigue el avance dentro de la informática y es aquí donde nos damos cuenta
que el microchip, ha ayudado a manejar más rápido la información
- 13 -
Quinta generación
Hay dos grandes avances tecnológicos que quizás sirvan como parámetro para el
inicio de dicha generación: la creación en 1982 de la primera supercomputadora
con capacidad de proceso paralelo, diseñada por Seymouy Cray.
La característica principal sería la aplicación de la inteligencia artificial. Las
computadoras de esta generación contienen una gran cantidad de
microprocesadores trabajando en paralelo y pueden reconocer voz e imágenes.
Sexta generación
Aparentemente, ésta sería la última generación dentro de los computadores más,
el futuro es incierto ya que no se sabe qué nos traerá el avance tecnológico.
“Esta generación cuenta con arquitecturas combinadas Paralelo y Vectorial, con
cientos de microprocesadores vectoriales trabajando al mismo tiempo”
(Noya, 1997, pág. 78); se han creado computadoras capaces de realizar más de
un millón de millones de operaciones aritméticas de punto flotante por segundo las
redes de área mundial) seguirán creciendo desorbitadamente utilizando medios de
comunicación a través de fibras ópticas y satélites, con anchos de banda
impresionantes.
1.2 Análisis de las distintas posiciones teóricas sobre Procesos
informáticos.
1.2.1 Procesos informáticos.
Se refiere a la ejecución de diversas instrucciones por parte del microprocesador,
de acuerdo a lo que indica un programa. El sistema operativo de la computadora
se encarga de gestionar los procesos. Este software administra las instrucciones
que otros programas informáticos destinan al microprocesador, analiza el estado
de ejecución y organiza la memoria dedicada a las tareas.

- 14 -
El sistema operativo se encarga de crear y borrar los procesos y de establecer
comunicaciones entre ellos. La forma de gestión, de todos modos, depende de las
maneras de trabajar de cada sistema operativo en particular.
Existen diversos caminos para la creación de un proceso informático, como el
propio inicio del sistema, el pedido de un usuario o la llamada realizada por otro
proceso. En cuanto a la finalización de un proceso, puede concretarse de manera
normal, a partir de un error o por petición de otro proceso.
1.2.2 Automatización y Robótica.
1.2.2.1 Automatización.
La automatización industrial es el uso de sistemas o elementos computarizados y
electromecánicos para controlar maquinarias o procesos industriales. Como una
disciplina de la ingeniería más amplia que un sistema de control, abarca la
instrumentación industrial, que incluye los sensores, los transmisores de campo,
los sistemas de control y supervisión, los sistemas de transmisión y recolección de
datos y las aplicaciones de software en tiempo real para supervisar, controlar las
operaciones de plantas o procesos industriales. (Loila Iban, 2005).
La automatización es un sistema donde se trasfieren tareas de producción,
realizadas habitualmente por operadores humanos a un conjunto de elementos
tecnológicos.
Un sistema automatizado consta de dos partes principales:
Parte Operativa
Es la parte que actúa directamente sobre la máquina. Son los elementos que
hacen que la máquina se mueva y realice la operación deseada. Los elementos
que forman la parte operativa son los accionadores de las máquinas como
motores, cilindros, compresores. Y los captadores como fotodiodos, finales de
carrera.
- 15 -
Parte de Mando
Suele ser un autómata programable (tecnología programada), aunque hasta hace
bien poco se utilizaban relés electromagnéticos, tarjetas electrónicas o módulos
lógicos neumáticos (tecnología cableada). En un sistema de fabricación
automatizado el autómata programable está en el centro del sistema. Este debe
ser capaz de comunicarse con todos los constituyentes de sistema automatizado.
1.2.2.1.1 Objetivos de la automatización
Mejorar las condiciones de trabajo del personal, suprimiendo los trabajos
penosos e incrementando la seguridad.
Mejorar la productividad de la empresa, reduciendo los costes de la producción
y mejorando la calidad de la misma.
Mejorar la disponibilidad de los productos, pudiendo proveer las cantidades
necesarias en el momento preciso.
Realizar las operaciones imposibles de controlar intelectual o manualmente.
Simplificar el mantenimiento de forma que el operario no requiera grandes
conocimientos para la manipulación del proceso productivo.
Integrar la gestión y producción
1.2.2.2 Sistemas de Control
Un sistema de control es un tipo de sistema que se caracteriza por la presencia de
una serie de elementos que permiten influir en el funcionamiento del sistema. La
finalidad de un sistema de control es conseguir, mediante la manipulación de las
variables de control, un dominio sobre las variables de salida, de modo que estas
alcancen unos valores prefijados.
1.2.2.2.1 Sistema de control de lazo abierto
Es un esquema de control en el que la salida del proceso a controlar no afecta a la
acción de control, es decir es muy sensible a perturbaciones y variaciones.
Requiere un conocimiento preciso del proceso a controlar y la garantía del
correcto funcionamiento del controlador, que no tiene acceso a la salida de
proceso. (Angulo Cecilio, Raya Cristóbal, 2006).
- 16 -
Es aquel sistema en que solo actúa el proceso sobre la señal de entrada y da
como resultado una señal de salida independiente a la señal de entrada, pero
basada en la primera. Esto significa que no hay retroalimentación hacia el
controlador para que éste pueda ajustar la acción de control. Es decir, la señal de
salida no se convierte en señal de entrada para el controlador.
Estos sistemas se caracterizan por:
Ser sencillos y de fácil concepto.
Nada asegura su estabilidad ante una perturbación.
La salida no se compara con la entrada.
Ser afectado por las perturbaciones. Éstas pueden ser tangibles o intangibles.
La precisión depende de la previa calibración del sistema.
1.2.2.2.2 Sistema de control de Lazo Cerrado.
El control en lazo cerrado, realimentado o feedback es el mecanismo básico que
se utiliza en los proceso, ya sean mecanismos, eléctricos o biológicos, para
mantener su equilibrio. Puede definirse como el uso de una diferencia de señales,
determinada comparando el valor real de la variable de proceso y el deseado,
como medio para controlar un sistema. La salida del proceso es utilizada para
regular la amplitud de su entrada, razón por la que se denomina sistema de control
en lazo cerrado. (Angulo Cecilio, Raya Cristóbal, 2006).
Son los sistemas en los que la acción de control está en función de la señal de
salida. Los sistemas de circuito cerrado usan la retroalimentación desde un
resultado final para ajustar la acción de control en consecuencia. El control en lazo
cerrado es imprescindible cuando se da alguna de las siguientes circunstancias:
Cuando un proceso no es posible de regular por el hombre.
Una producción a gran escala que exige grandes instalaciones y el hombre no
es capaz de manejar.

- 17 -
Vigilar un proceso es especialmente difícil en algunos casos y requiere una
atención que el hombre puede perder fácilmente por cansancio o despiste, con
los consiguientes riesgos que ello pueda ocasionar al trabajador y al proceso.
Sus características son:
Ser complejos, pero amplios en cantidad de parámetros.
La salida se compara con la entrada y le afecta para el control del sistema.
Su propiedad de retroalimentación.
Ser más estable a perturbaciones y variaciones internas.
Un ejemplo de un sistema de control de lazo cerrado sería el termo-tanque de
agua que utilizamos para bañarnos. Otro ejemplo sería un regulador de nivel de
gran sensibilidad de un depósito. El movimiento de la boya produce más o menos
obstrucción en un chorro de aire o gas a baja presión. Esto se traduce en cambios
de presión que afectan a la membrana de la válvula de paso, haciendo que se
abra más cuanto más cerca se encuentre del nivel máximo.
1.2.2.3 Robótica.
1.2.2.3.1 Definición.
La Robótica es una ciencia o rama de la tecnología, que estudia el diseño y
construcción de máquinas capaces de desempeñar tareas realizadas por el ser
humano o que requieren del uso de Inteligencia Artificial. (UNSAAC, 2006)
La robótica industrial, desde sus orígenes, estuvo muy orientada a las funciones
de manipulación, De hecho, suele considerarse que un robot industrial es
esencialmente un robot manipulador, Por ello, la mayor parte de los libros de
robótica se dedican exclusivamente a robots manipuladores.
La Robótica abre una nueva y decisiva etapa en el actual proceso de
mecanización y automatización creciente de los procesos de producción. Consiste
esencialmente en la sustitución de máquinas o sistemas automáticos que
realizan operaciones concretas, por dispositivos mecánicos que realizan
operaciones concretas, por dispositivos mecánicos de uso general, dotados de

- 18 -
varios grados de libertad en sus movimientos y capaces de adaptarse a la
automatización de un número muy variado de procesos y operaciones.
La Robótica se ha caracterizado por el desarrollo de sistemas cada vez más
flexibles, versátiles y polivalentes, mediante la utilización de nuevas estructuras
mecánicas y de nuevos métodos de control y percepción.
(Ollero Aníbal Baturone, 2005)
1.2.2.3.2 Leyes de la Robótica
Primera ley: Un robot no debe hacer daño a una persona o dejar que una
persona sufra un daño por su falta de acción.
Segunda ley: Un robot debe cumplir con todas las órdenes que le programa
un humano, en caso de que las órdenes fueran contradictorias respecto a la
primera ley.
Tercera ley: Un robot debe cuidar su propia integridad, excepto cuando esta
protección genera un inconveniente con la primera o segunda ley.
1.2.3 Robot
1.2.3.1 Definición
Un robot, es un agente artificial mecánico o virtual. Es una máquina usada para
realizar un trabajo automáticamente y que es controlada por una computadora.
Si bien la palabra robot puede utilizarse para agentes físicos y agentes virtuales de
software, estos últimos son llamados "bots" para diferenciarlos de los otros.
1.2.3.2 Clasificación de los robots
Los robots se clasifican de acuerdo a su aplicación, su arquitectura, su nivel de
inteligencia, su generación, su nivel de control, y a su nivel de lenguaje de
programación.
1.2.3.3 Por Generación
La clasificación de los robots según su generación se la realiza de acuerdo al
software en el controlador, el diseño mecánico y la capacidad de los sensores

- 19 -
1.2.3.3.1 Primera Generación- Manipuladores
Esta primera etapa se puede considerar desde los años 50s, en donde las
maquinas diseñadas cuentan con un sistema de control relativamente sencillo de
lazo abierto, esto significa que no existe retroalimentación alguna por parte de
algún sensor y realizan tareas previamente programadas que se ejecutan
secuencialmente.
1.2.3.3.2 Segunda Generación- Robots de Aprendizaje
La segunda etapa se desarrolla hasta los años 80s, este tipo de robots son un
poco más conscientes de su entorno que su previa generación, disponiendo de
sistemas de control de lazo cerrado en donde por medio de sensores adquieren
información de su entorno y obtienen la capacidad de actuar o adaptarse según
los datos analizados.
También pueden aprender y memorizar la secuencia de movimientos deseados
mediante el seguimiento de los movimientos de un operador humano.
1.2.3.3.3 Tercera Generación- Robots con Control Sensorizado
Durante esta etapa, que tiene lugar durante los años 80s y 90s, los robots ahora
cuentan con controladores (computadoras) que usando los datos o la información
obtenida de sensores, obtienen la habilidad de ejecutar las ordenes de un
programa escrito en alguno de los lenguajes de programación que surgen a raíz
de la necesidad de introducir las instrucciones deseadas en dichas maquinas.
Los robots usan control del tipo lazo cerrado, lo cual significa que ahora son
bastante conscientes de su entorno y pueden adaptarse al mismo.
1.2.3.3.4 Cuarta Generación- Robots Inteligentes
Esta generación se caracteriza por tener sensores mucho más sofisticados que
mandan información al controlador y la analizan mediante estrategias complejas
de control. Debido a la nueva tecnología y estrategias utilizadas estos robots
califican como "inteligentes", se adaptan y aprenden de su entorno utilizando
"conocimiento difuso" , "redes neuronales", y otros métodos de análisis y
obtención de datos para así mejorar el desempeño general del sistema en tiempo
- 20 -
real, donde ahora el robot puede basar sus acciones en información más sólida y
confiable, y no solo esto sino que también se pueden dar la tarea de supervisar el
ambiente que les rodea, mediante la incorporación de conceptos "modélicos" que
les permite actuar a situaciones determinadas.
1.2.3.3.5 Quinta Generación y más allá
La siguiente generación será una nueva tecnología que incorporara 100%
inteligencia artificial y utilizara métodos como modelos de conducta y una nueva
arquitectura, además de otras tecnologías actualmente en desarrollo como la
nanotecnología.
Esta etapa depende totalmente de la nueva generación de jóvenes interesados en
robótica.
1.2.4 Componentes del robot
1.2.4.1 Sensores
Los sensores imitan la capacidad de percepción de los seres humanos, por ello es
cada vez más usual encontrarlos incorporados a cualquier área tecnológica.
Debido a esta característica de imitar la percepción humana, los sensores son por
lo tanto dispositivos electrónicos que permiten interactuar con el entorno, de forma
que nos proporcionan información de ciertas variables que nos rodean para poder
procesarlas y así generar órdenes o activar procesos.
Con la incorporación de sensores a los sistemas electrónicos se les ha dotado de
cierta inteligencia artificial ya que a través de la información que proporcionan y
una vez procesada convenientemente, permiten tomar con precisión y rapidez las
mejores decisiones dentro del cometido para el que están diseñados dichos
sistemas electrónicos. (Antonio Serna Ruiz 2010)
Los sensores no es más que un dispositivo diseñado para recibir información de
una magnitud del exterior y transformarla en otra magnitud, normalmente eléctrica,
que seamos capaces de cuantificar y manipular.
- 21 -
1.2.4.1.1 Características de los sensores
Es necesario conocer las características técnicas sobre la calidad del sensor:
Resolución: Es la mínima variación de la magnitud de entrada que puede
apreciarse a la salida.
Sensibilidad: Es la relación entre la variación de la magnitud de salida y la
variación de la magnitud de entrada.
Error: Es la desviación de la medida proporcionada por el sensor respecto de
la real. Se suele expresar en porcentaje %.
Precisión: Es el error de medida máximo esperado.
Repetitividad: Es el error esperado al repetir varias veces la misma medida.
A la hora de elegir un sensor para una aplicación concreta, es necesario tener en
cuenta determinados aspectos para obtener el mejor rendimiento dentro de dicha
aplicación:
Rapidez en la respuesta.
Situación donde van a ser utilizados.
Radio de acción.
Fiabilidad en el funcionamiento.
Tensiones de alimentación.
Consumo de corriente.
Márgenes de temperatura de funcionamiento.
Posibles interferencias por agentes externos.
Relación calidad /precio.
1.2.4.2 Tipos de sensores
1.2.4.2.1 Sensores de Contacto
Sensores de contacto también conocido como bumper es un conmutador de 2
posiciones con muelle de retorno a la posición de reposo y con una palanca de
accionamiento más o menos larga según el modelo elegido. Se usan para
detección de obstáculos por contacto directo. (Estela Díaz López, 2006)

- 22 -
Los sensores de contacto pueden subdividirse en dos categorías principales:
binarios y analógicos.
Los sensores binarios son esencialmente conmutadores que responden a la
presencia o ausencia de un objeto. Por el contrario los sensores analógicos
proporcionan a la salida una señal proporcional a una fuerza local.
1.2.4.2.2 Sensor Infrarrojo.
Es un pequeño dispositivo que puede alojar en su interior un diodo emisor de
infrarrojos que trabaja a una longitud de onda determinada y un receptor, que
puede ser un fototransistor que se dispone en paralelo al emisor apuntando ambos
en la misma dirección, puede ser un sensor lineal, dependiendo del modelo su
salida puede ser analógica, digital o booleana. (Estela Díaz López, 2006).
Es un instrumento usado en los robots rastreadores para detección de líneas
pintadas o movimiento de ruedas, es decir, es un dispositivo electrónico capaz de
medir la radiación electromagnética infrarroja de los cuerpos en su campo de
visión.
1.2.4.2.3 Sensores de Temperatura.
Los sensores de temperatura son dispositivos que transforman los cambios de
temperatura en cambios en señales eléctricas que son procesados por equipo
eléctrico o electrónico. Es un circuito integrado que da una tensión proporcional a
la temperatura ambiente. Dependiendo del modelo su rango de temperaturas varía
y puede que trabaje con grados kelvin o grados centígrados.
Se usan para detección de la temperatura ambiente que tiene a su alrededor,
pudiendo activar módulos refrigeradores.
1.2.4.2.4 Sensores Ópticos.
Un sensor óptico se basa en el aprovechamiento de la interacción entre la luz y la
materia para determinar las propiedades de está. Una mejora de los dispositivos
- 23 -
sensores, comprende la utilización de la fibra óptica como elemento de
transmisión de la luz. (Dayro Carlos, Corredor Alfonso, Espinel Henry, 2007).
Son aquellos que detectan la presencia de una persona o de un objeto que
interrumpen el haz de luz que le llega al sensor. También son utilizados para leer y
detectar información. Los principales sensores ópticos son las fotorresistencias,
las LDR, fotodiodo, fototransistor.
•Fotorresistencia
Su resistencia disminuye con el aumento de intensidad de luz que se aplique.
•Fotodiodo
Sensible a la incidencia de luz visible o infrarroja, ante la ausencia de luz generan
tensión.
•Fototransistor
Es sensible a la luz infrarroja, es más sensible que un fotodiodo.
•Las LDR
Regulan el movimiento del robot y lo detienen cuando topa cierto obstáculo.
1.2.4.2 Actuadores
Los actuadores son los encargados de generar el movimiento de los diferentes
mecanismos o elementos que conforman el robot.
Los actuadores eléctricos
Se utilizan principalmente en robots que no demanden de altas velocidad ni
potencia. Son usados en aplicaciones que requieran de exactitud y repetitividad.
Los motores eléctricos más utilizados en robóticas son los motores de corriente
continua y los motores de paso a paso.
Los actuadores hidráulicos
Se utilizan en robots de gran tamaño que requieran mayor velocidad para la
ejecución de tareas y una mayor resistencia mecánica para la manipulación de
cargas pesadas.

- 24 -
Los actuadores neumáticos
Son usados en aquellas aplicaciones que requieran solo dos estados, por ejemplo
en la apertura y el cierre de la pinza de un manipulador.
1.2.4.3 Servomotor
También llamado motor de servo es un dispositivo similar a un motor de corriente
continua que tiene la capacidad de ubicarse en cualquier posición dentro de su
rango de operación, y mantenerse estable en dicha posición.
Un servomotor es un motor eléctrico que puede ser controlado tanto en velocidad
como en posición.
Es posible modificar un servomotor para obtener un motor de corriente continua
que, si bien ya no tiene la capacidad de control del servo, conserva la fuerza,
velocidad y baja inercia que caracteriza a estos dispositivos.
1.2.5 Aplicaciones Tecnológicas
Las aplicaciones nacen de alguna necesidad concreta de los usuarios, y se usan
para facilitar o permitir la ejecución de ciertas tareas en las que un analista o un
programador han detectado una cierta necesidad. Pero las aplicaciones también
pueden responder a necesidades lúdicas, además de laborales (todos los juegos,
por ejemplo, son considerados aplicaciones). Se suele decir que para cada
problema hay una solución, y en informática, para cada problema hay una
aplicación.
Las aplicaciones pueden ser desde pequeñísimos programas de apenas unas
líneas de código, hasta grandes obras de ingeniería informática, con miles de
horas de trabajo detrás. El tamaño, sin embargo, no define el éxito de una
aplicación, sino justamente que cubra las necesidades del usuario. La historia de
las aplicaciones está llena de miles de grandes aplicaciones que han sido
substituidas por otras a priori mucho menos elaboradas, simplemente porque eran
más rápidas, más intuitivas, más estables o cumplían mejor su función.
- 25 -
1.3 Valoración crítica de las distintas posiciones teorías sobre la robótica
Con la implementación del robot humanoide autómata programado se va a
contribuir al desarrollo tecnológico en el área de robótica dentro de la Universidad,
además de aportar con conocimientos adquiridos a los estudiantes de la
Universidad.
Es indispensable incluir esta rama en estudios superiores puesto que los países
desarrollados tiene estudios avanzados en robótica, y en Ecuador se debe
contribuir con conocimientos de este tipo para iniciar una nueva etapa tecnológica
avanzada y aun mas implementando en las instituciones educativas de nivel
superior el área de robótica.
El estudio en el área de la robótica se realiza para que la Universidad Uniandes se
forme como una Universidad dedicada a la investigación ya que los estudiantes
obtendrán conocimientos básicos y avanzados, induciéndolos así al manejo de
tecnologías actuales y al desarrollo de proyectos tecnológicos acordes a las
necesidades locales.
- 26 -
1.4 Conclusiones Parciales del Capítulo I.
Se concluye que:
Con el desarrollo de los temas y subtemas que abarca el marco teórico, se
consiguió fortalecer los conocimientos bajo los cuales va a estar fundamentada
la propuesta, a través de análisis y comparación de los conceptos citados.
El presente capítulo tiene que ver con los diferentes aspectos teóricos en el
que se ha definido y analizado los temas respectivos acerca de la robótica, la
electrónica, los mismos que son de vital importancia para la elaboración de la
propuesta de investigación.
La robótica es algo que ha venido avanzando con respecto de los años y que
se ha ido implementando más en la vida del ser humano, no tardará mucho
para llegar a ser una necesidad más que una herramienta, pues últimamente
su presencia ha sido esencial para el desarrollo óptimo de las empresas e
industrias.
En la actualidad la robótica es fundamental para las instituciones de nivel
superior, con el propósito de ofrecer a los estudiantes nuevos conocimientos
en tecnología, el cual les permita desarrollar e implementar dentro de la
institución.
- 27 -
CAPÍTULO II MARCO METODOLÓGICO.
2.1 Caracterización de la Universidad Regional Autónoma de los Andes
Uniandes extensión Tulcán.
La Universidad Uniandes extensión Tulcán se encuentra ubicada en el sector de
Santa Rosa de Taques sector sur.
Es una Institución autónoma de educación superior privada, tiene su matriz en la
ciudad de Ambato. La Universidad Uniandes tiene como visión ser reconocida a
nivel nacional e internacional por su calidad en educación.
La universidad está dedicada a brindar formación profesional a bachilleres a través
de diversas modalidades de estudio con tres facultades la facultad de medicina,
jurisprudencia y sistemas mercantiles con la modalidad presencial y
semipresencial, la extensión Uniandes Tulcán cuenta, ofrece las carreras de
enfermería, derecho, sistemas y contabilidad y auditoría, cuenta con
infraestructura acorde a las necesidades de los estudiantes como laboratorios
equipados con computadoras de última generación. Cuenta con un cuerpo
docente de alto nivel académico, capacitados para brindar una buena formación
profesional, acorde con los avances científicos y tecnológicos.
2.2 Descripción del procedimiento metodológico para el desarrollo de la
investigación
2.2.1 Modalidad de Investigación
La modalidad de la investigación que se utiliza para el desarrollo de la presente
tesis de grado, es de tipo mixto combina a los paradigmas cuantitativo y
cualitativo, que exponen las razones de su utilización a continuación.
El paradigma cuantitativo se lo utiliza por llevar a cabo una investigación de
campo, fundamentada en encuestas o entrevistas, las mismas que son aplicadas
a una muestra debidamente seleccionada de la población motivo de estudio, para
los cuales se tabulan los datos en forma numérica y se presentan en gráficas

- 28 -
estadísticos, estos instrumentos han sido aplicados en encuestas realizadas en la
carrera de Sistemas de Uniandes Tulcán, además del análisis estadístico de los
datos obtenidos.
En el Paradigma Cualitativo se presenta una orientación interpretativa de los
resultados y de la realidad, se lo emplea por la utilización de métodos teóricos de
investigación, los mismos que permiten el análisis de la información teórica
presentada en la tesis en el presente tema de investigación los datos adquiridos
en las encuestas se los interpreta como la necesidad de implementar un
laboratorio de robótica, el cual ayudara a los estudiantes de la carrera de Sistemas
de la Universidad Regional Autónoma de los Andes de la ciudad de Tulcán a
adquirir estos conocimientos e impulse a la creación y programación de robots.
2.2.2 Tipos de Investigación.
Los tipos de investigación empleados para el desarrollo de este trabajo de grado
son:
2.2.2.1 Investigación Bibliográfica
En la investigación bibliográfica se desarrolla la elaboración del marco teórico, ya
que se encuentra sustentado por diversas fuentes de investigación bibliográfica
tales como libros, revistas e internet.
2.2.2.2 Investigación Aplicada
Esta investigación se la encuentra en el desarrollo del robot humanoide autómata
programado, ya que se aplicó los conocimientos adquiridos en el transcurso del
nivel académico.
2.2.2.3 Investigación Descriptiva.
Se realiza el desarrollo de la investigación Descriptiva para examinar las
características del problema, describir, analizar e interpretan los datos obtenidos,
en términos claros y precisos.
- 29 -
2.2.2.4 Investigación de Campo.
En la investigación de campo se realiza la aplicación de encuestas a la muestra
representativa de la población objeto de estudio, es decir a los estudiantes que se
encuentran interactuando de forma directa de la Carrera de Sistemas de
Uniandes Tulcán.
2.2.2.5 Investigación Correlacional.
En la investigación correccional se relaciona las variables utilizadas, lo cual será
muy útil cuando se realice análisis pertinentes para tener más claro el problema.
2.2.3 Métodos, técnicas e instrumentos de investigación
2.2.3.1 Métodos de Investigación.
Para una adecuada investigación de campo, que permita dar alternativas de
solución a las interrogantes planteadas para respaldar la idea a defender, se
aplicaron los Métodos Empíricos y Teóricos.
2.2.3.1.1 Métodos Empíricos
Es un modelo de investigación científica, que se basa en la experimentación y la
lógica empírica, que junto a la observación de fenómenos y su análisis estadístico,
es el más usado en el campo de las ciencias sociales y en las ciencias naturales.
Los métodos a utilizarse en la elaboración de la presente tesis son:
Observación Científica.
Porque es un elemento fundamental; en todo proceso investigativo, para obtener
el mayor número de información, observando la estructura, funcionamiento
clasificando y resumiendo los datos, ya que gran parte del conocimiento que
constituye la ciencia ha sido lograda mediante la observación.
- 30 -
Análisis Documental.
Este método es aplicable porque consiste en seleccionar las ideas
informativamente relevantes de un documento a fin de expresar su contenido sin
ambigüedades para recuperar la información en él contenida. Esta representación
puede ser utilizada para identificar el documento, para procurar los puntos de
acceso en la búsqueda de documentos, para indicar su contenido o para servir de
sustituto del documento.
Validación de Expertos
Consiste en validar el tema propuesto a través de una crítica profesional por
personas expertas al tema, con el fin de darle valía al tema.
2.2.3.1.2 Métodos Teóricos
A través de los métodos teóricos se logra descubrir la esencia del objeto
investigado y sus interrelaciones, ya que no se puede llegar a ella mediante la
percepción. Por ello se apoya básicamente en los procesos de abstracción,
análisis, síntesis, inducción y deducción. Entre los métodos teóricos que se
destacan en la realización de la presente tesis son:
Método Histórico – Lógico.
Se va a utilizar este método en la presente tesis porque el método histórico real
es reflejado en forma mediatizada con toda su objetividad, complejidad y
contradicciones. El pensamiento a través de lo lógico refleja lo histórico en forma
esencial, con lo que reproduce la esencia del objeto y la historia de su desarrollo
en un sistema de abstracciones. Lo histórico, con referencia a lo lógico, es lo
primario; la lógica refleja los momentos y consideraciones fundamentales de la
historia.
Método Analítico – Sintético
Este método implica el análisis y la síntesis, es decir la separación de un todo en
sus partes o en sus elementos constitutivos, y la segunda implicando la unión de

- 31 -
elementos para formar un todo. En la tesis de grado optaremos por descomponer
y distinguir los elementos de un todo y revisar ordenadamente cada uno de ellos
por separado para descubrir los distintos elementos que lo componen como las
causas y los efectos.
Método Inductivo – Deductivo
En términos muy generales, consiste en establecer enunciados universales ciertos
a partir de la experiencia, esto es, ascender lógicamente a través del conocimiento
científico, desde la observación de los fenómenos o hechos de la realidad la ley
universal que los contiene. Es por eso que este método será utilizable en la tesis,
porque parte de un marco general de referencia y se va hacia un caso en
particular.
2.2.3.1.3 Método Sistémico
Es importante utilizar este método en la tesis porque permite relacionar hechos
aparentemente aislados y se formula una teoría que unifica los diversos
elementos.
2.2.4 Metodología de Desarrollo de la Robótica.
La metodología de desarrollo de la robótica a emplear es la orientada a
automatización y control, la misma que tiene las siguientes fases o etapas:
Análisis Orientado a procesos autómatas
Porque es una metodología de análisis que examina los requisitos desde la
perspectiva de tener la capacidad de implementar un agente no vivo, que se
encuentran en el vocabulario del dominio del problema. El Análisis orientado a
procesos autómatas ofrece un enfoque muy tecnológico para el análisis de
requisitos de sistemas robots, ya que mediante estos se pueden analizar procesos
robóticos mediante sensores físicos y sensores mecánicos en máquinas, pulsos
eléctricos u ópticos en computadoras, tanto como por entradas y salidas de bits de
un software y su entorno.

- 32 -
Diseño de procesos robóticos
Se utilizará esta metodología ya que permite manipular la actividad de concepción,
creación y puesta en funcionamiento, con fines industriales y pedagógicos, de
objetos tecnológicos que son reproducciones reducidas muy fieles y significativas
de los procesos y herramientas robóticos que son usados cotidianamente, sobre
todo, en el medio actual.
Diseño de sistemas robots
Es importante utilizar este tipo de sistemas en la presente tesis ya que son un
sistema electromecánico, dotado de sensores y actuadores para realizar
actividades de tipo industrial, con un sistema de control y capacidad de decisión
que le permite realizar tareas automáticas o autónomas, dependiendo de su grado
de versatilidad y complejidad.
Construcción del Robot
Permite documentar la construcción del robot humanoide e incluir los comentarios
que expliquen tanto cómo y por qué se utilizó cierto procedimiento conforme se
codifico de cierta forma. La documentación es esencial para poder realizar
prácticas con el robot y el mantenimiento una vez que la aplicación se ha puesto
en marcha.
Pruebas
El objetivo principal es ejercitar profundamente el sistema autómata, comprobando
la integración del funcionamiento del robot humanoide globalmente, verificando el
funcionamiento correcto de las interfaces entre los distintos procesos que lo
componen y con el resto de sistemas con los que se comunica.

- 33 -
2.2.5 Técnicas de investigación.
2.2.5.1 Encuesta
Fue aplicada con la finalidad de obtener datos estadísticos relacionados a los
diferentes aspectos tratados. Con la aplicación de esta técnica se obtuvo diversos
puntos de vista que aportaron las personas entendidas en la materia que hemos
tratado en el presente trabajo investigativo.
2.2 Instrumentos de Investigación.
2.2.6.1 Cuestionario.
Este instrumento de la encuesta permitió obtener información oportuna y
necesaria como elemento justificativo para el propósito de la presente
investigación, la cual se obtuvo gracias a la colaboración de los estudiantes de la
Carrera de Sistemas de la Universidad Regional Autónoma de los Andes Uniandes
extensión Tulcán.
2.2.7 Población y Muestra
2.2.7.1 Población.
Al realizar las encuestas a los estudiantes de la Universidad, se trata de
investigación de campo.
Para el desarrollo del presente trabajo de investigación la población total o
universo está definido por 33 estudiantes de la Carrera de Sistemas de la
Universidad Regional Autónoma de los Andes extensión Tulcán, de los cuales son:
ESTUDIANTES Nro.
Sistemas III 12
Sistemas VII 11
Sistemas IX 10
Total 33
Tabla nº 01
Fuente: Secretaría Uniandes Tulcán
Elaborado por: Jhonny Bolaños
- 34 -
2.2.7.2 Muestra
Para la presente investigación se trabaja con toda la población, es decir, los 33
estudiantes de la carrera de sistemas de la Universidad Regional Autónoma de los
Andes de la Extensión Tulcán.
2.2.8 Interpretación de resultados de las Encuestas Aplicadas
Encuesta dirigida a los estudiantes de la carrera se sistemas de la Universidad
Uniandes extensión Tulcán.
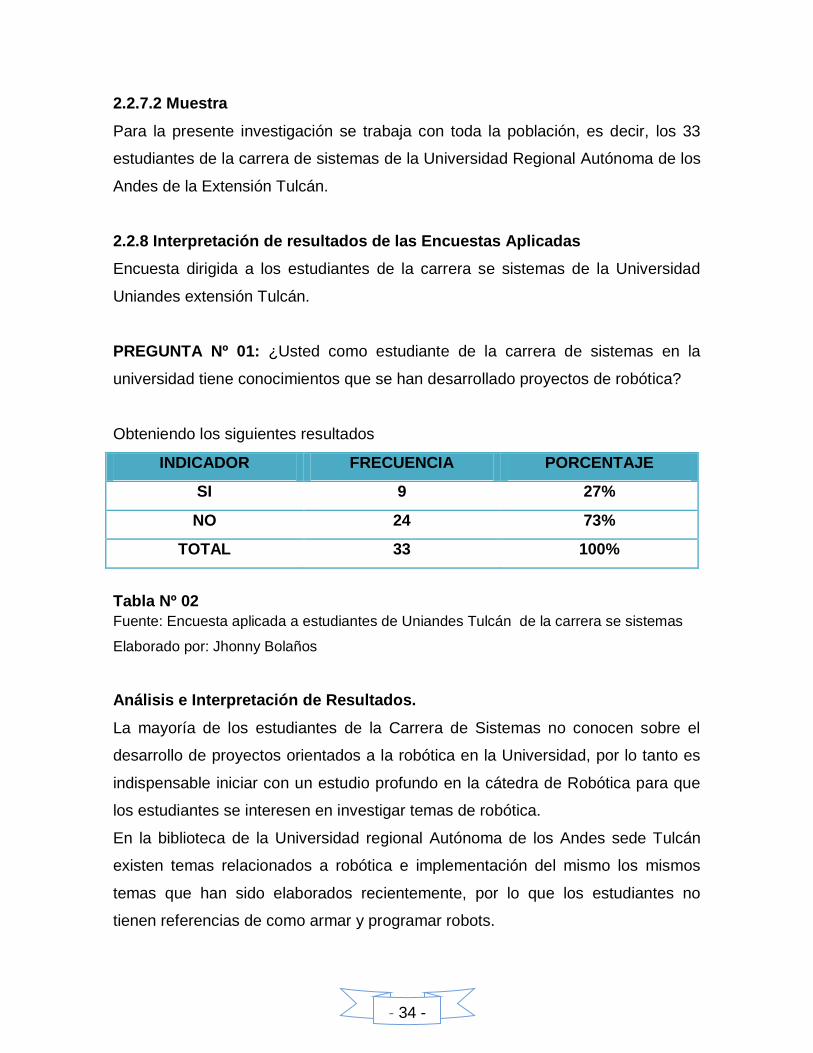
PREGUNTA Nº 01: ¿Usted como estudiante de la carrera de sistemas en la
universidad tiene conocimientos que se han desarrollado proyectos de robótica?
Obteniendo los siguientes resultados
INDICADOR FRECUENCIA PORCENTAJE
SI 9 27%
NO 24 73%
TOTAL 33 100%
Tabla Nº 02
Fuente: Encuesta aplicada a estudiantes de Uniandes Tulcán de la carrera se sistemas
Elaborado por: Jhonny Bolaños
Análisis e Interpretación de Resultados.
La mayoría de los estudiantes de la Carrera de Sistemas no conocen sobre el
desarrollo de proyectos orientados a la robótica en la Universidad, por lo tanto es
indispensable iniciar con un estudio profundo en la cátedra de Robótica para que
los estudiantes se interesen en investigar temas de robótica.
En la biblioteca de la Universidad regional Autónoma de los Andes sede Tulcán
existen temas relacionados a robótica e implementación del mismo los mismos
temas que han sido elaborados recientemente, por lo que los estudiantes no
tienen referencias de como armar y programar robots.
- 35 -
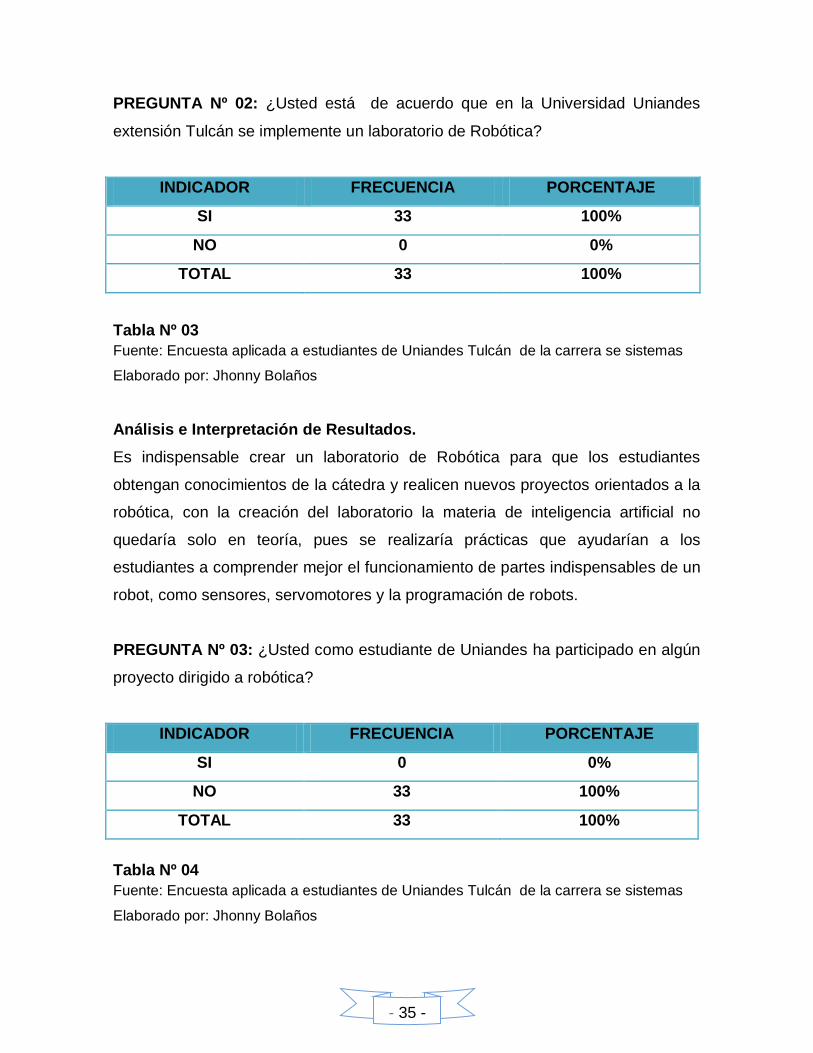
PREGUNTA Nº 02: ¿Usted está de acuerdo que en la Universidad Uniandes
extensión Tulcán se implemente un laboratorio de Robótica?
INDICADOR FRECUENCIA PORCENTAJE
SI 33 100%
NO 0 0%
TOTAL 33 100%
Tabla Nº 03
Fuente: Encuesta aplicada a estudiantes de Uniandes Tulcán de la carrera se sistemas
Elaborado por: Jhonny Bolaños
Análisis e Interpretación de Resultados.
Es indispensable crear un laboratorio de Robótica para que los estudiantes
obtengan conocimientos de la cátedra y realicen nuevos proyectos orientados a la
robótica, con la creación del laboratorio la materia de inteligencia artificial no
quedaría solo en teoría, pues se realizaría prácticas que ayudarían a los
estudiantes a comprender mejor el funcionamiento de partes indispensables de un
robot, como sensores, servomotores y la programación de robots.
PREGUNTA Nº 03: ¿Usted como estudiante de Uniandes ha participado en algún
proyecto dirigido a robótica?
INDICADOR FRECUENCIA PORCENTAJE
SI 0 0%
NO 33 100%
TOTAL 33 100%
Tabla Nº 04
Fuente: Encuesta aplicada a estudiantes de Uniandes Tulcán de la carrera se sistemas
Elaborado por: Jhonny Bolaños

- 36 -
Análisis e Interpretación de Resultados.
La totalidad de los estudiantes de la Carrera de Sistemas no han participado en
el desarrollo de proyectos orientados a la robótica en la Universidad ni fuera de
ella, por lo tanto mediante la implementación del robot tendrán conocimientos y
los estudiantes tendrán interés en investigar temas de robótica.
PREGUNTA Nº 04: ¿Usted cómo califica la enseñanza de la materia de robótica
en la universidad Uniandes extensión Tulcán?
INDICADOR FRECUENCIA PORCENTAJE
EXECELENTE 1 3%
MUY BUENO 7 21%
BUENO 10 30%
REGULAR 15 45%
TOTAL 33 100%
Tabla Nº 05
Fuente: Encuesta aplicada a estudiantes de Uniandes Tulcán de la carrera se sistemas
Elaborado por: Jhonny Bolaños
Análisis e Interpretación de Resultados.
La mayoría de estudiantes encuestados dicen que la enseñanza de la Robótica es
regular debido a la falta de un laboratorio de robótica por lo tanto se debe aplicar
un plan de mejoras en la cátedra. Observamos que existe un gran
pronunciamiento por parte de los estudiantes que debería existir más
preocupación por parte de las autoridades para incentivar en el estudio de temas
referentes a robótica y electrónica.

- 37 -
PREGUNTA Nº 05: ¿Usted como estudiante de sistemas le gustaría diseñar y
programar sus propios Robots en la asignatura de Robótica?
INDICADOR FRECUENCIA PORCENTAJE
SI 30 90%
NO 3 10%
TOTAL 33 100%
Tabla Nº 06
Fuente: Encuesta aplicada a estudiantes de Uniandes Tulcán de la carrera se sistemas
Elaborado por: Jhonny Bolaños
Análisis e Interpretación de Resultados.
A los estudiantes de la Carrera de Sistemas les gustaría diseñar robots por lo
tanto se debe implementar un laboratorio de Robótica equipado y el personal
docente debe actualizar sus conocimientos para así preparar y guiar a los
estudiantes en temas de electrónica y robótica, los estudiantes están interesados
en que se apique una cátedra de robótica y con la implementación de un
laboratorio podrán construir y programar pequeños robots, lastimosamente en la
Universidad se brinda la cátedra de programación pero no orientado a robótica.
PREGUNTA Nº 06: ¿Usted considera que en la construcción y programación de
los robots los estudiantes ponen en práctica sus conocimientos adquiridos?
INDICADOR FRECUENCIA PORCENTAJE
SI 29 87%
NO 4 13%
TOTAL 33 100%
Tabla Nº 07
Fuente: Encuesta aplicada a estudiantes de Uniandes Tulcán de la carrera se sistemas
Elaborado por: Jhonny Bolaños
- 38 -
Análisis e Interpretación de Resultados.
La mayoría de estudiantes de la universidad Uniandes extensión Tulcán están de
acuerdo en que la construcción de robots pone en práctica los conocimientos
adquiridos durante el tiempo de estudio los estudiantes están interesados en que
se aplique una cátedra de robótica y con la implementación de un laboratorio
podrán construir y programar pequeños robots.
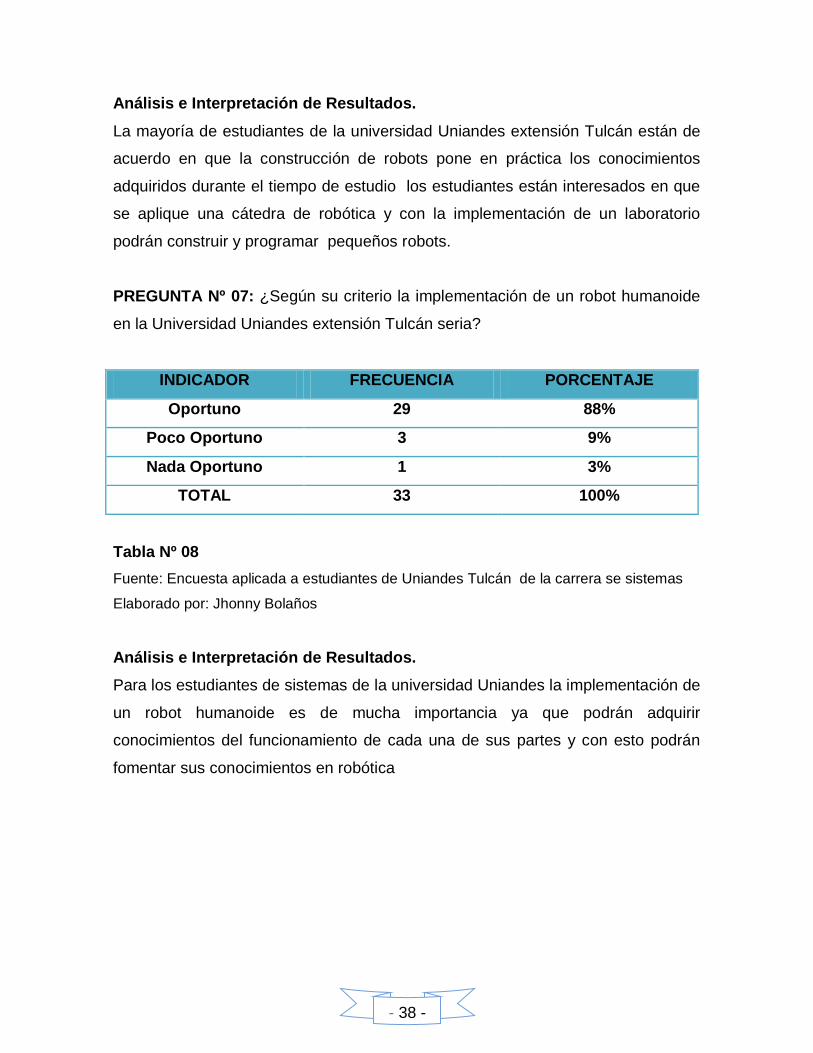
PREGUNTA Nº 07: ¿Según su criterio la implementación de un robot humanoide
en la Universidad Uniandes extensión Tulcán seria?
INDICADOR FRECUENCIA PORCENTAJE
Oportuno 29 88%
Poco Oportuno 3 9%
Nada Oportuno 1 3%
TOTAL 33 100%
Tabla Nº 08
Fuente: Encuesta aplicada a estudiantes de Uniandes Tulcán de la carrera se sistemas
Elaborado por: Jhonny Bolaños
Análisis e Interpretación de Resultados.
Para los estudiantes de sistemas de la universidad Uniandes la implementación de
un robot humanoide es de mucha importancia ya que podrán adquirir
conocimientos del funcionamiento de cada una de sus partes y con esto podrán
fomentar sus conocimientos en robótica

- 39 -
2.3 Conclusiones Parciales del Capítulo II.
El presente capítulo contiene la descripción del procedimiento metodológico
para el desarrollo de la investigación, en el cual se describe las aplicaciones
del tipo de investigación así como los diferentes métodos, técnicas e
instrumentos aplicadas en el desarrollo del presente trabajo, los cuales son de
gran importancia para la elaboración del diagnóstico y la propuesta de
investigación.
Existe la necesidad de que se implemente un laboratorio de robótica para que
los estudiantes de la universidad Uniandes extensión Tulcán puedan poner en
práctica los conocimientos sobre electrónica y robótica y puedan con ello
desarrollar robots.
Se puede concluir que de conformidad a los resultados obtenidos en la
aplicación de la encuesta la mayor parte de los estudiantes de la Universidad
“Uniandes” Tulcán, tienen interés en obtener conocimientos acerca de la
robótica.
- 40 -
CAPÍTULO III DESARROLLO DE LA PROPUESTA
3.1. Título de la Propuesta.
Robot Humanoide autómata programado para Uniandes Tulcán.
3.2 Antecedentes de la Propuesta
En esta investigación se desarrolla un robot humanoide, el mismo que para
desplazarse dispondrá de una plataforma dotada de sistemas complejos de
control, donde será capaz de caminar, y realizar movimientos respondiendo a
ordenes sensoriales de un administrador, lo que quiere decir que también
reaccionará a estímulos, eventos inesperados que puedan ocurrir como evitar
obstáculos y caídas inesperadas, la comunicación con el administrador será
tratada por el dispositivo software y hardware de control.
La construcción y programación de un robot humanoide es combinar tecnologías
robóticas dado que integra una computadora, sistemas sensoriales y motores de
articulación para hacer posible que un conjunto de hardware y software, puedan
tratarse como si fuera un compañero interactivo.
Es indudable que se han desarrollado soluciones de automatización y control en
las que utilizar técnicas de inteligencia artificial aporta beneficios a la humanidad
una de las formas en que más se visualiza la automatización, es en la utilización
de robots para la realización de actividades que van desde sencillas a complejas,
las mismas que antes sólo el ser humano podía llevar a cabo.
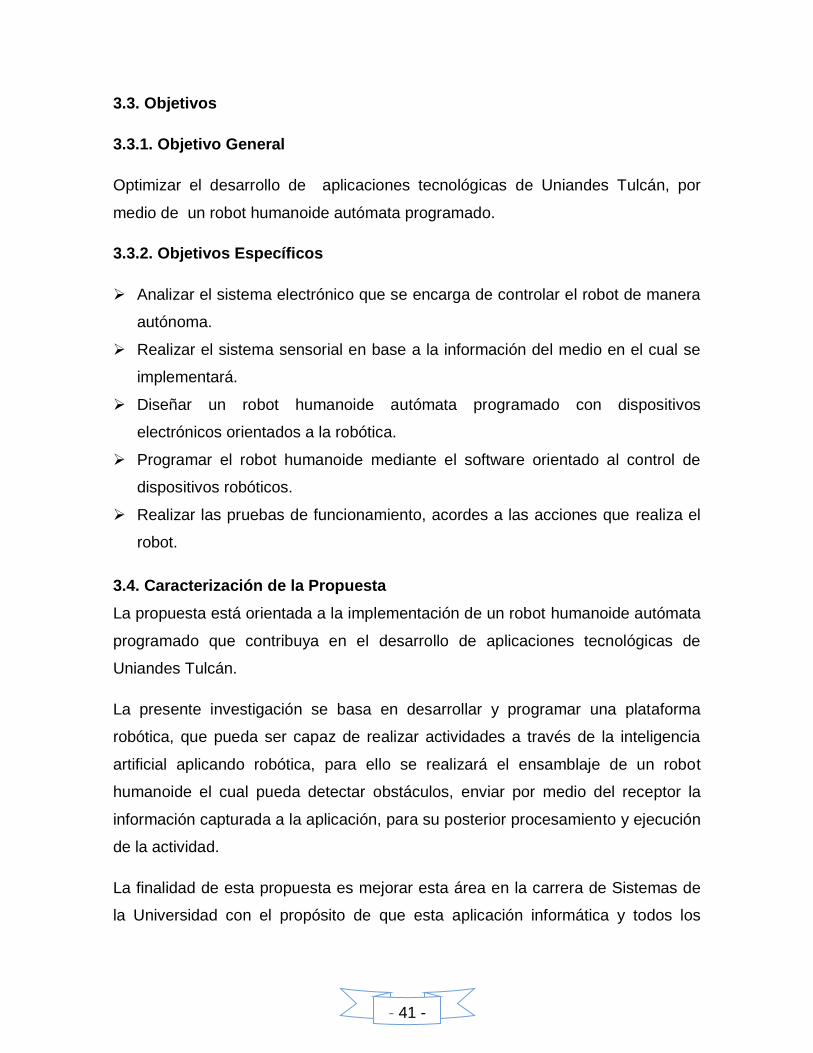
- 41 -
3.3. Objetivos
3.3.1. Objetivo General
Optimizar el desarrollo de aplicaciones tecnológicas de Uniandes Tulcán, por
medio de un robot humanoide autómata programado.
3.3.2. Objetivos Específicos
Analizar el sistema electrónico que se encarga de controlar el robot de manera
autónoma.
Realizar el sistema sensorial en base a la información del medio en el cual se
implementará.
Diseñar un robot humanoide autómata programado con dispositivos
electrónicos orientados a la robótica.
Programar el robot humanoide mediante el software orientado al control de
dispositivos robóticos.
Realizar las pruebas de funcionamiento, acordes a las acciones que realiza el
robot.
3.4. Caracterización de la Propuesta
La propuesta está orientada a la implementación de un robot humanoide autómata
programado que contribuya en el desarrollo de aplicaciones tecnológicas de
Uniandes Tulcán.
La presente investigación se basa en desarrollar y programar una plataforma
robótica, que pueda ser capaz de realizar actividades a través de la inteligencia
artificial aplicando robótica, para ello se realizará el ensamblaje de un robot
humanoide el cual pueda detectar obstáculos, enviar por medio del receptor la
información capturada a la aplicación, para su posterior procesamiento y ejecución
de la actividad.
La finalidad de esta propuesta es mejorar esta área en la carrera de Sistemas de
la Universidad con el propósito de que esta aplicación informática y todos los

- 42 -
dispositivos físicos y equipos necesarios para su funcionamiento se desarrollen y
se implementen en beneficio de estudiantes, docentes y la comunidad.
De esta manera se cumple con uno de los propósitos principales de la carrera de
Sistemas, el cual es innovar tecnológicamente e investigar soluciones y
alternativas que aplicadas al medio educativo, solucionen problemas con ideas
prácticas.
En definitiva la realización de la propuesta conlleva a promover que en el futuro
otras generaciones de estudiantes se motiven y estén dispuestos a incursionar en
el campo de la robótica, logrando de esta manera que la Universidad en sus áreas
de enseñanza técnica se afiance aún más.
3.5. Planteamiento detallado de la Propuesta.
3.5.1. Descripción del Sistema Actual.
Problema Requerimiento
Falta de Investigación y recursos
tecnológicos
Conocimiento más profundo de nuevas
tecnologías actuales.
Mínimos Conocimientos sobre
robótica
Profundizar más sobre el tema de la
Robótica.
Pocas actividades en el desarrollo
de robótica
Ensamblar dispositivos aplicando
conocimientos de robótica dentro de la
Universidad.
Tabla Nº 09
Fuente: Investigación De Campo
Elaborado por: Jhonny Bolaños
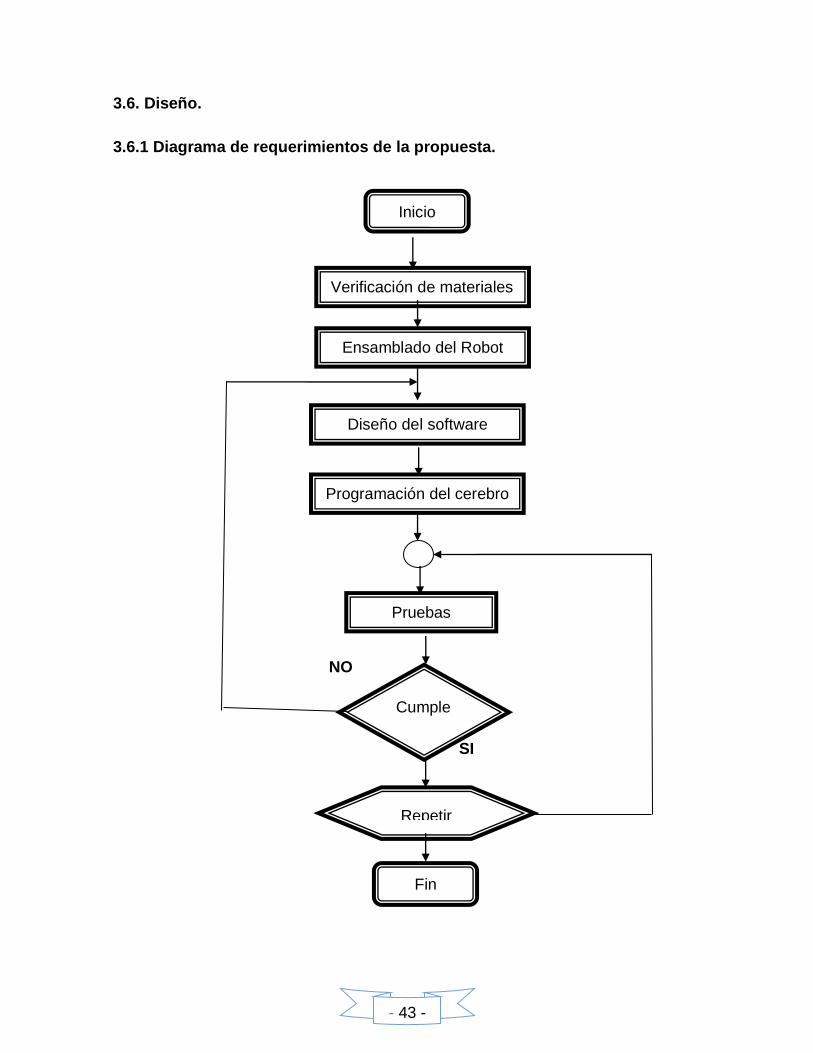
- 43 -
3.6. Diseño.
3.6.1 Diagrama de requerimientos de la propuesta.
NO
SI
Fin
Inicio
Verificación de materiales
Ensamblado del Robot
Diseño del software
Programación del cerebro
Pruebas
Cumple
Repetir
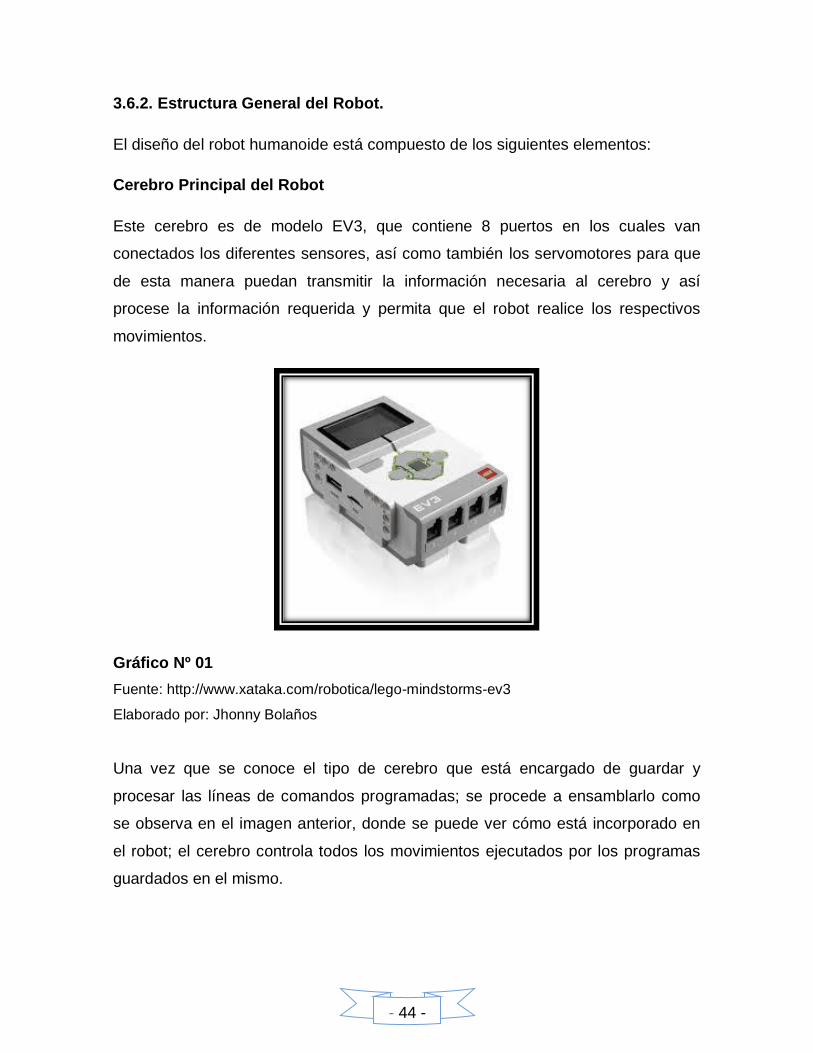
- 44 -
3.6.2. Estructura General del Robot.
El diseño del robot humanoide está compuesto de los siguientes elementos:
Cerebro Principal del Robot
Este cerebro es de modelo EV3, que contiene 8 puertos en los cuales van
conectados los diferentes sensores, así como también los servomotores para que
de esta manera puedan transmitir la información necesaria al cerebro y así
procese la información requerida y permita que el robot realice los respectivos
movimientos.
Gráfico Nº 01
Fuente: http://www.xataka.com/robotica/lego-mindstorms-ev3
Elaborado por: Jhonny Bolaños
Una vez que se conoce el tipo de cerebro que está encargado de guardar y
procesar las líneas de comandos programadas; se procede a ensamblarlo como
se observa en el imagen anterior, donde se puede ver cómo está incorporado en
el robot; el cerebro controla todos los movimientos ejecutados por los programas
guardados en el mismo.
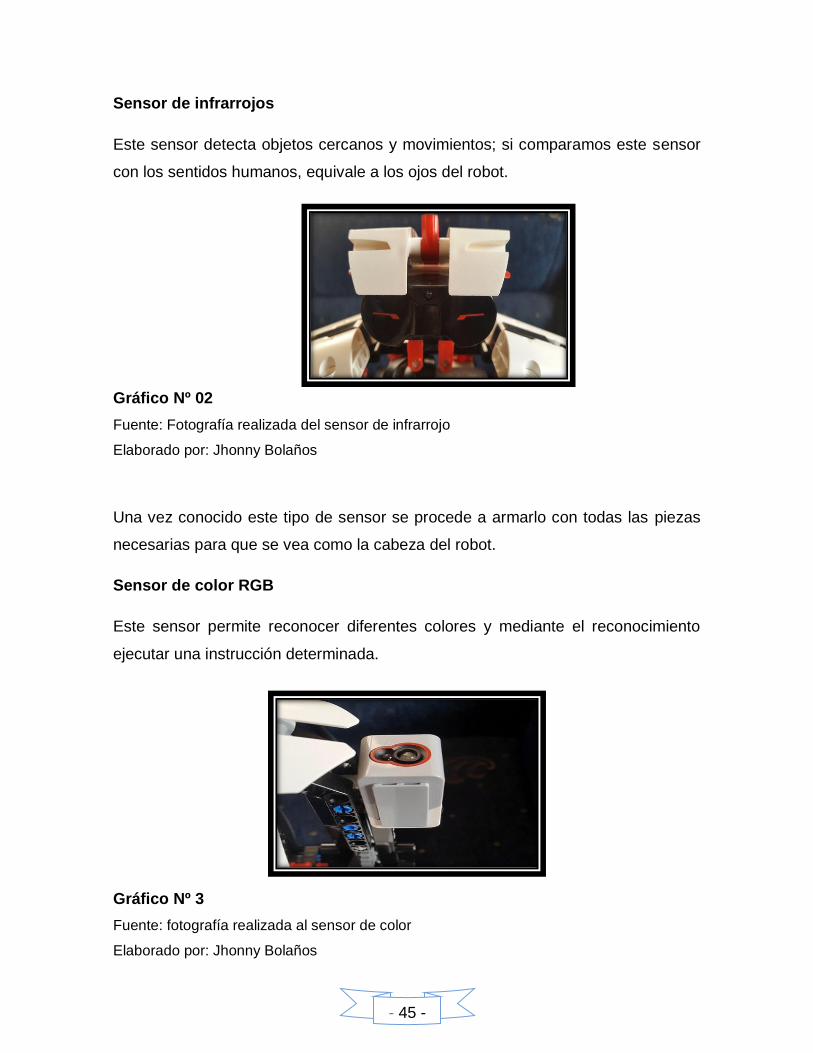
- 45 -
Sensor de infrarrojos
Este sensor detecta objetos cercanos y movimientos; si comparamos este sensor
con los sentidos humanos, equivale a los ojos del robot.
Gráfico Nº 02
Fuente: Fotografía realizada del sensor de infrarrojo
Elaborado por: Jhonny Bolaños
Una vez conocido este tipo de sensor se procede a armarlo con todas las piezas
necesarias para que se vea como la cabeza del robot.
Sensor de color RGB
Este sensor permite reconocer diferentes colores y mediante el reconocimiento
ejecutar una instrucción determinada.
Gráfico Nº 3
Fuente: fotografía realizada al sensor de color
Elaborado por: Jhonny Bolaños

46
Sensor de Contacto
Este sensor permite realizar la ejecución de una instrucción determinada mediante
el contacto o choque con el medio ambiente.
Gráfico Nº 4
Fuente: fotografía realizada al sensor de contacto
Elaborado por: Jhonny Bolaños
Servomotores
Los servomotores permiten la movilidad del robot; es decir, el robot tendrá
movimiento y podrá desplazarse, ya que son una de las partes fundamentales
para que el robot tenga movilidad.
Gráfico Nº 5
Fuente: fotografía realizada a los servomotores que conforman el robot
Elaborado por: Jhonny Bolaños
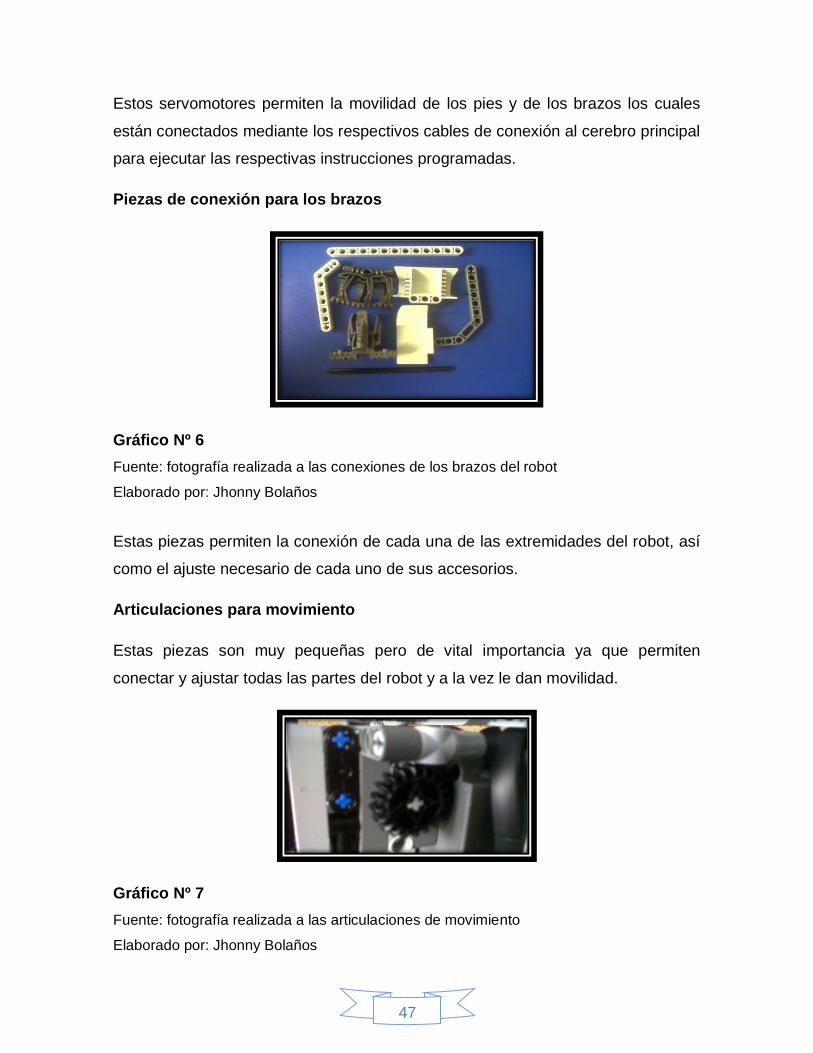
47
Estos servomotores permiten la movilidad de los pies y de los brazos los cuales
están conectados mediante los respectivos cables de conexión al cerebro principal
para ejecutar las respectivas instrucciones programadas.
Piezas de conexión para los brazos
Gráfico Nº 6
Fuente: fotografía realizada a las conexiones de los brazos del robot
Elaborado por: Jhonny Bolaños
Estas piezas permiten la conexión de cada una de las extremidades del robot, así
como el ajuste necesario de cada uno de sus accesorios.
Articulaciones para movimiento
Estas piezas son muy pequeñas pero de vital importancia ya que permiten
conectar y ajustar todas las partes del robot y a la vez le dan movilidad.
Gráfico Nº 7
Fuente: fotografía realizada a las articulaciones de movimiento
Elaborado por: Jhonny Bolaños

48
Gráfico Nº 8
Fuente: fotografía realizada a las piezas para uniones del robot
Elaborado por: Jhonny Bolaños
Cables de conexión del cerebro principal
Mediante los cables se conectarán los servomotores y sensores con el cerebro
central del robot el cual es el encargado de controlar el dispositivo.
Gráfico Nº 9
Fuente: fotografía realizada a los cables de conexión
Elaborado por: Jhonny Bolaños
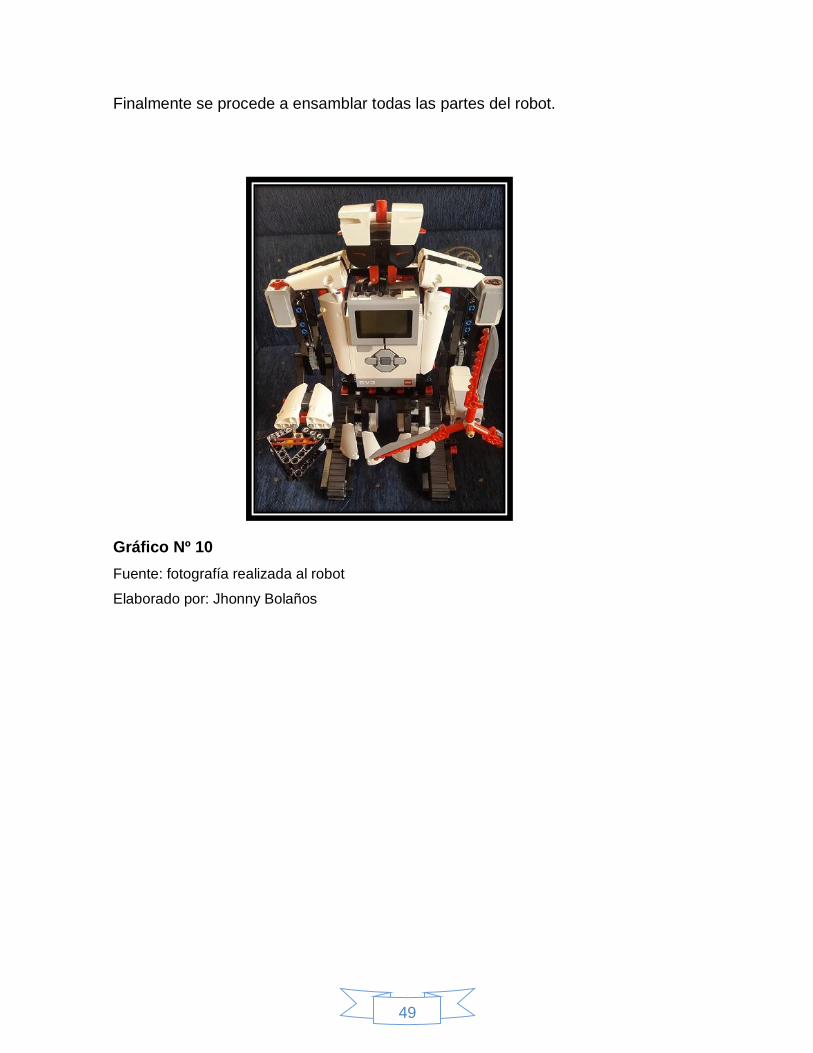
49
Finalmente se procede a ensamblar todas las partes del robot.
Gráfico Nº 10
Fuente: fotografía realizada al robot
Elaborado por: Jhonny Bolaños
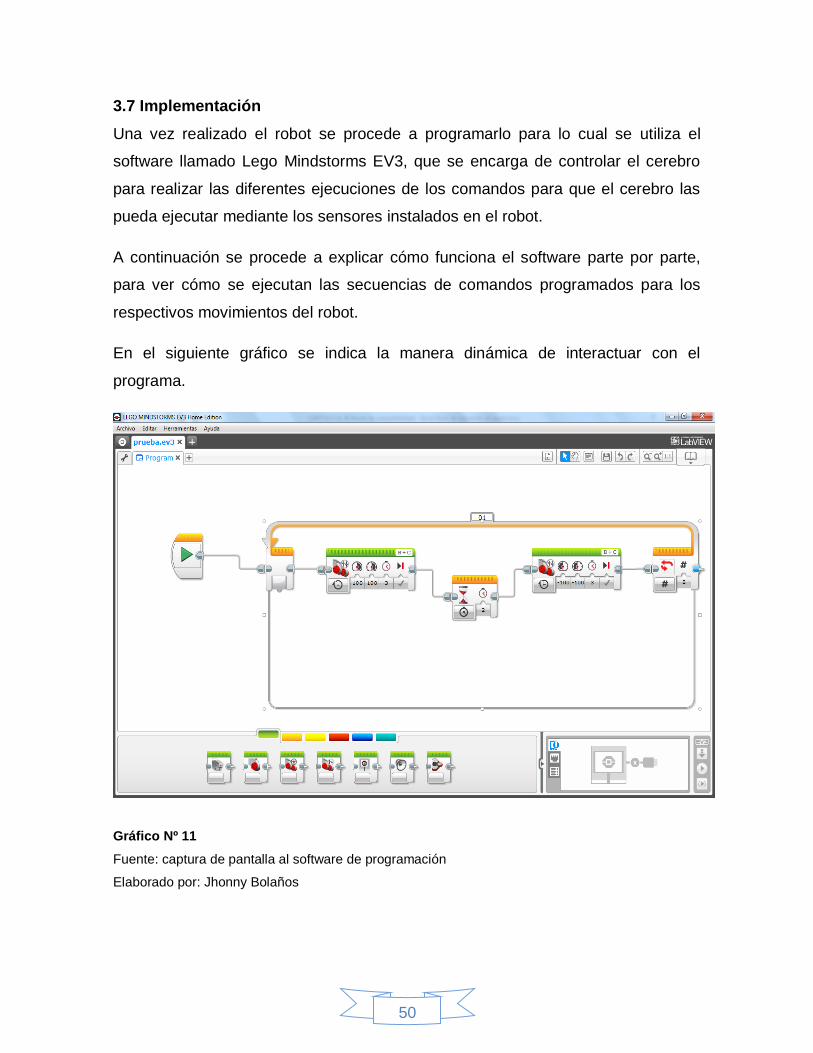
50
3.7 Implementación
Una vez realizado el robot se procede a programarlo para lo cual se utiliza el
software llamado Lego Mindstorms EV3, que se encarga de controlar el cerebro
para realizar las diferentes ejecuciones de los comandos para que el cerebro las
pueda ejecutar mediante los sensores instalados en el robot.
A continuación se procede a explicar cómo funciona el software parte por parte,
para ver cómo se ejecutan las secuencias de comandos programados para los
respectivos movimientos del robot.
En el siguiente gráfico se indica la manera dinámica de interactuar con el
programa.
Gráfico Nº 11
Fuente: captura de pantalla al software de programación
Elaborado por: Jhonny Bolaños
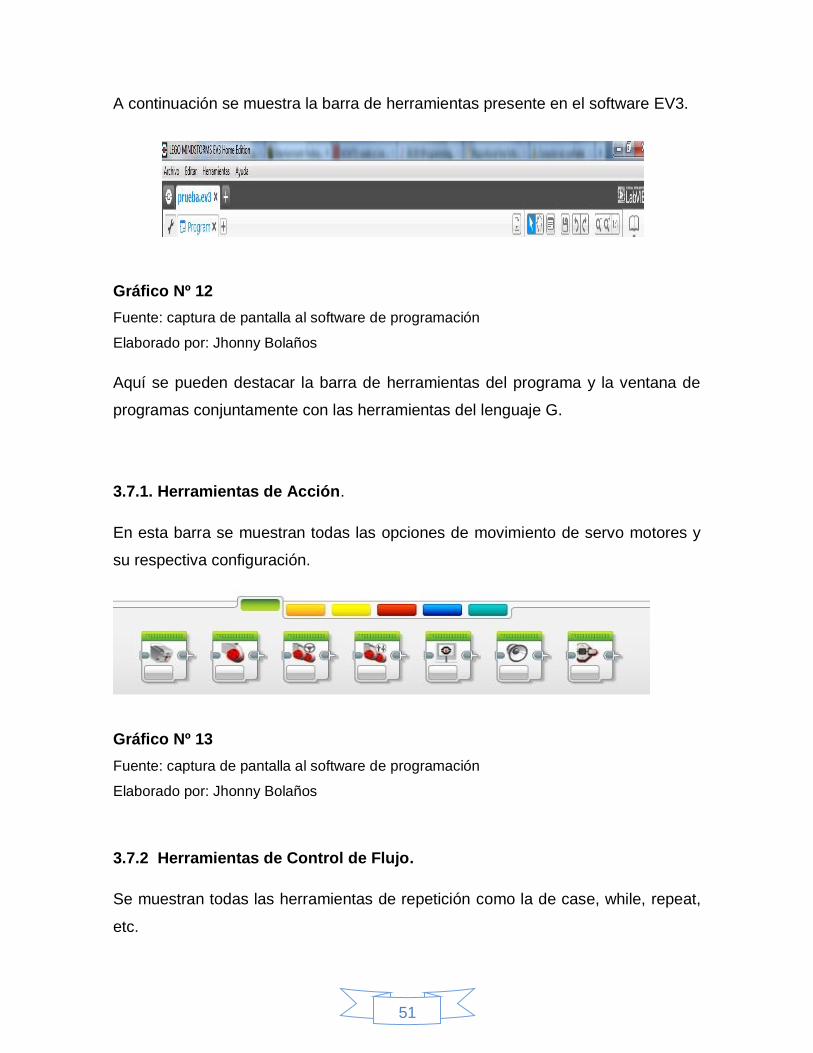
51
A continuación se muestra la barra de herramientas presente en el software EV3.
Gráfico Nº 12
Fuente: captura de pantalla al software de programación
Elaborado por: Jhonny Bolaños
Aquí se pueden destacar la barra de herramientas del programa y la ventana de
programas conjuntamente con las herramientas del lenguaje G.
3.7.1. Herramientas de Acción.
En esta barra se muestran todas las opciones de movimiento de servo motores y
su respectiva configuración.
Gráfico Nº 13
Fuente: captura de pantalla al software de programación
Elaborado por: Jhonny Bolaños
3.7.2 Herramientas de Control de Flujo.
Se muestran todas las herramientas de repetición como la de case, while, repeat,
etc.

52
Gráfico Nº 14
Fuente: captura de pantalla al software de programación
Elaborado por: Jhonny Bolaños
3.7.3. Sensores.
Se muestran las herramientas que permiten controlar los diferentes sensores del
robot, como son: sensor de luz, sensor de color, sensor de contacto, sensor de
ultrasonidos, sensor infrarrojo, etc.
Gráfico Nº 15
Fuente: captura de pantalla al software de programación
Elaborado por: Jhonny Bolaños
3.7.4. Herramientas para Operaciones con Datos
Se muestran todas las herramientas para realizar las diferentes operaciones en
donde intervienen datos.
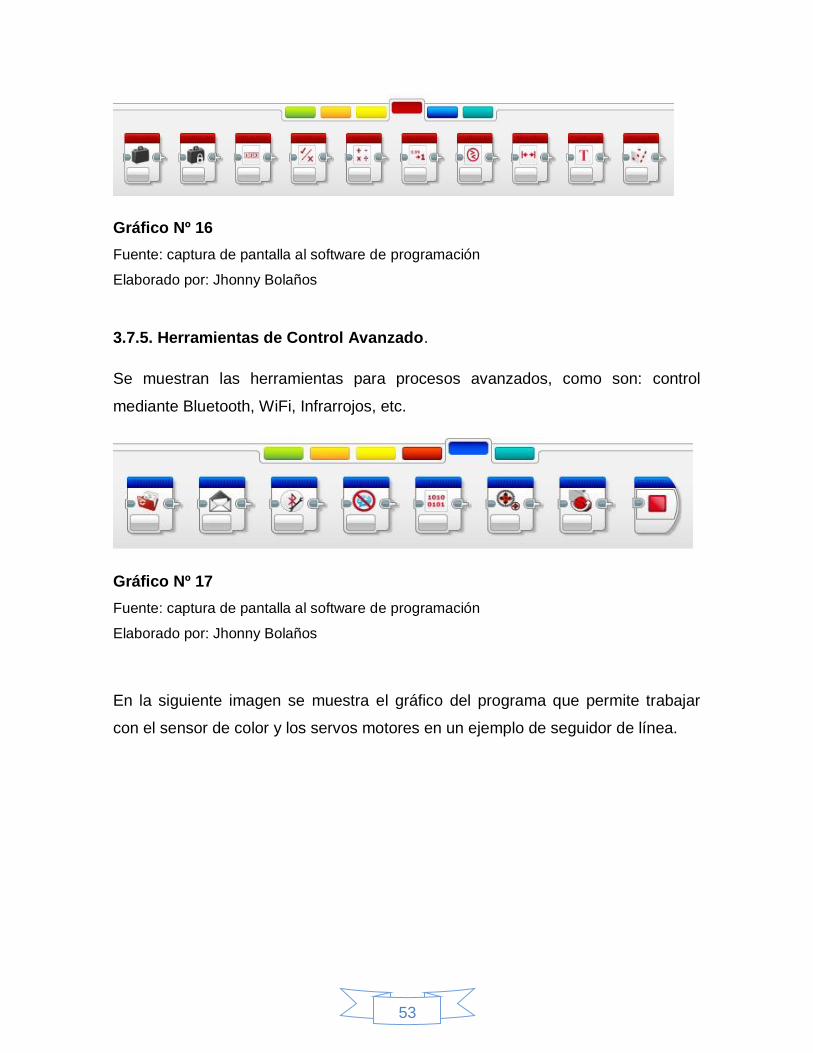
53
Gráfico Nº 16
Fuente: captura de pantalla al software de programación
Elaborado por: Jhonny Bolaños
3.7.5. Herramientas de Control Avanzado.
Se muestran las herramientas para procesos avanzados, como son: control
mediante Bluetooth, WiFi, Infrarrojos, etc.
Gráfico Nº 17
Fuente: captura de pantalla al software de programación
Elaborado por: Jhonny Bolaños
En la siguiente imagen se muestra el gráfico del programa que permite trabajar
con el sensor de color y los servos motores en un ejemplo de seguidor de línea.

54
Gráfico Nº 18
Fuente: captura de pantalla al software de programación
Elaborado por: Jhonny Bolaños
3.8 Pruebas
Después del análisis del robot humanoide y el software con el que se va a
manipular el mismo se procede a realizar las pruebas con los debidos sensores.
3.8.1. Primera Prueba – Sensor de Luz
Para esto se utilizó el sensor de luz, el cual detecta colores y se programa con los
servomotores en un ciclo repetitivo infinito el cual permite el movimiento del robot
humanoide, para el movimiento según colores como por ejemplo moverse en línea
recta, girar o detenerse.
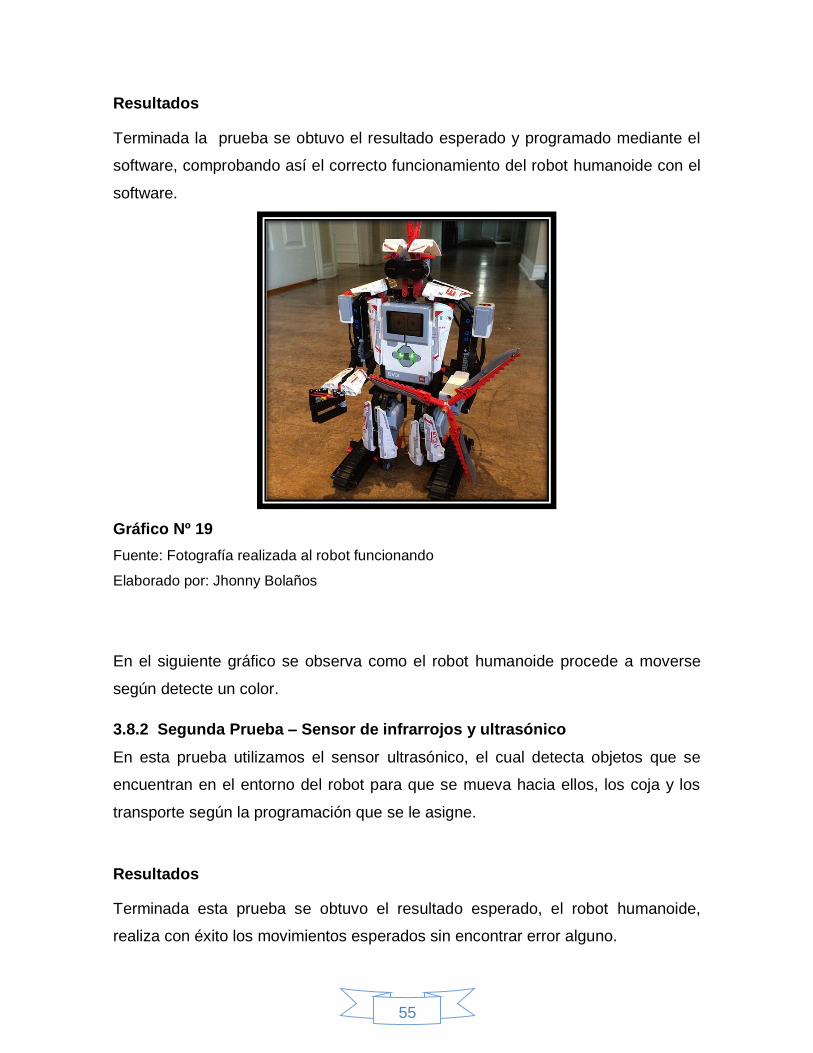
55
Resultados
Terminada la prueba se obtuvo el resultado esperado y programado mediante el
software, comprobando así el correcto funcionamiento del robot humanoide con el
software.
Gráfico Nº 19
Fuente: Fotografía realizada al robot funcionando
Elaborado por: Jhonny Bolaños
En el siguiente gráfico se observa como el robot humanoide procede a moverse
según detecte un color.
3.8.2 Segunda Prueba – Sensor de infrarrojos y ultrasónico
En esta prueba utilizamos el sensor ultrasónico, el cual detecta objetos que se
encuentran en el entorno del robot para que se mueva hacia ellos, los coja y los
transporte según la programación que se le asigne.
Resultados
Terminada esta prueba se obtuvo el resultado esperado, el robot humanoide,
realiza con éxito los movimientos esperados sin encontrar error alguno.

56
Gráfico Nº 20
Fuente: Fotografía realizada al robot funcionando
Elaborado por: Jhonny Bolaños
3.9. Validación de la Propuesta.
La validación de la propuesta se realizó mediante la vía de expertos, los cuales
son Ingenieros en el área de Sistemas, a los cuales se les pidió revisar cómo está
estructurado el robot, así como la programación del mismo, realizando pruebas del
software las mismas que fueron enviadas al cerebro del robot para ser ejecutadas
en presencia de los expertos, obteniendo los resultados propuestos y constatando
así el correcto funcionamiento del robot. Posteriormente se pidió a cada uno de los
expertos llenar la ficha de validación de la propuesta en la cual constan aspectos
del robot, las mismas que fueron llenadas a criterio de cada uno de ellos.

57
Validador 1.
Nº de cédula: 0401230370
Nombres y Apellidos: Hernán Javier Guancha
Título de mayor jerarquía: Ingeniero en Sistemas.
Institución que labora: Uniandes - Tulcán
Cargo Actual: Docente de tiempo completo.
Años de servicio: 4 años.
Experiencia profesional: 7 años
Validador 2.
Nº de cédula: 0401592514
Nombres y Apellidos: Daniel Paúl Rodríguez Guzmán.
Título de mayor jerarquía: Ingeniero en Sistemas Mercantiles.
Institución que labora: Uniandes - Tulcán
Cargo Actual: Asistente de Telemática.
Años de servicio: 2 años.
Experiencia profesional: 2 años 6 meses.
Validador 3.
Nº de cédula: 0401540877
Nombres y Apellidos: Leonardo Patricio Quilismal Duarte.
Título de mayor jerarquía: Ingeniero en Sistemas e Informática.
Institución que labora: NETCOM
Cargo Actual: Gerente-Administrador.
Años de servicio: 2 años.
Experiencia profesional: 6 años.
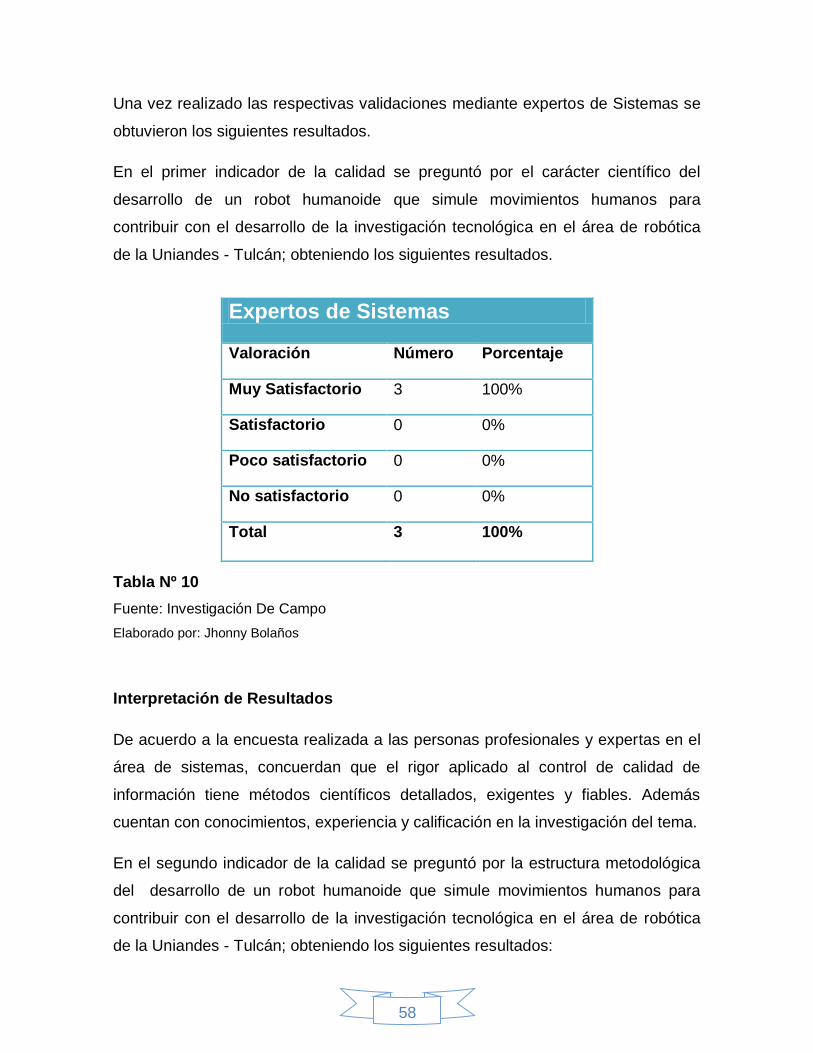
58
Una vez realizado las respectivas validaciones mediante expertos de Sistemas se
obtuvieron los siguientes resultados.
En el primer indicador de la calidad se preguntó por el carácter científico del
desarrollo de un robot humanoide que simule movimientos humanos para
contribuir con el desarrollo de la investigación tecnológica en el área de robótica
de la Uniandes - Tulcán; obteniendo los siguientes resultados.
Tabla Nº 10
Fuente: Investigación De Campo
Elaborado por: Jhonny Bolaños
Interpretación de Resultados
De acuerdo a la encuesta realizada a las personas profesionales y expertas en el
área de sistemas, concuerdan que el rigor aplicado al control de calidad de
información tiene métodos científicos detallados, exigentes y fiables. Además
cuentan con conocimientos, experiencia y calificación en la investigación del tema.
En el segundo indicador de la calidad se preguntó por la estructura metodológica
del desarrollo de un robot humanoide que simule movimientos humanos para
contribuir con el desarrollo de la investigación tecnológica en el área de robótica
de la Uniandes - Tulcán; obteniendo los siguientes resultados:
Expertos de Sistemas
Valoración Número Porcentaje
Muy Satisfactorio 3 100%
Satisfactorio 0 0%
Poco satisfactorio 0 0%
No satisfactorio 0 0%
Total 3 100%

59
Tabla Nº 11
Fuente: Investigación De Campo
Elaborado por: Jhonny Bolaños
Interpretación de Resultados
Con los resultados obtenidos de la encuesta, se determina que el presente trabajo
de investigación, contiene procesos sistemáticos y variables establecidos, en
donde se empleó la encuesta como principal instrumento para el desarrollo de la
investigación, permitiendo lograr los objetivos planteados
En el tercer indicador de la calidad se preguntó por la organización de la temática
del desarrollo de un robot humanoide que simule movimientos humanos para
contribuir con el desarrollo de la investigación tecnológica en el área de robótica
de la Uniandes - Tulcán; obteniendo los siguientes resultados:
Tabla Nº 12
Fuente: Investigación De Campo
Elaborado por: Jhonny Bolaños
Expertos de Sistemas
Valoración Número Porcentaje
Muy Satisfactorio 0 o%
Satisfactorio 3 100%
Poco satisfactorio 0 0%
No satisfactorio 0 0%
Total 3 100%
Expertos de Sistemas
Valoración Número Porcentaje
Muy Satisfactorio 3 100%
Satisfactorio 0 0%
Poco satisfactorio 0 0%
No satisfactorio 0 0%
Total 3 100%

60
Interpretación de Resultados
De acuerdo a los resultados alcanzados las personas con conocimiento en la
robótica coinciden que el presente trabajo cuenta con un proceso eficaz y
eficiente, con el fin de alcanzar un robot autómata de calidad.
En el cuarto indicador de la calidad se preguntó por la viabilidad para la aplicación
práctica del desarrollo de un robot humanoide que simule movimientos humanos
para contribuir con el desarrollo de la investigación tecnológica en el área de
robótica de la Uniandes - Tulcán; obteniendo los siguientes resultados:
Tabla Nº 13
Fuente: Investigación De Campo
Elaborado por: Jhonny Bolaños
Interpretación de Resultados
De acuerdo con la encuesta realizada a los diferentes expertos en el tema,
concuerdan que la información obtenida mediante la investigación, se determina
que la elaboración del robot autómata es viable, ya que la institución se encuentra
en bajos conocimientos en el área de la robótica, por lo que debe mejorar la
calidad vital de la institución mediante la implementación de un laboratorio robótico
y electrónico.
Expertos de Sistemas
Valoración Número Porcentaje
Muy Satisfactorio 3 100%
Satisfactorio 0 0%
Poco satisfactorio 0 0%
No satisfactorio 0 0%
Total 3 100%

61
En el quinto indicador de la calidad se preguntó por la actualidad del desarrollo de
un robot humanoide que simule movimientos humanos para contribuir con el
desarrollo de la investigación tecnológica en el área de robótica de la Uniandes -
Tulcán; obteniendo los siguientes resultados:
Tabla Nº 14
Fuente: Investigación De Campo
Elaborado por: Jhonny Bolaños
Interpretación de Resultados
De acuerdo a las personas profesionales en el área de sistemas con
conocimientos en el área de la robótica, concuerdan que la elaboración de este
robot es de vital importancia para la institución, ya que les va a permitir obtener
una herramienta de calidad, el cual va hacer utilizado para incentivar a los
estudiantes de la carrera de sistemas en el desarrollo de nuevos robots, en el cual
desarrollaran la creatividad que tienen los estudiantes.
Expertos de Sistemas
Valoración Número Porcentaje
Muy Satisfactorio 3 100%
Satisfactorio 0 0%
Poco satisfactorio 0 0%
No satisfactorio 0 0%
Total 3 100%

62
3.6. Conclusiones Parciales del Capítulo III.
Es necesario conocer el correcto funcionamiento del software con el que se va
a manipular el robot, ya que cualquier error puede dañar los circuitos internos
del cerebro o sensores, por tal motivo primero se debe conocer bien el
software para luego proceder a programarlo.
Para el ensamblado del robot humanoide es necesario conocer sobre cada una
de las piezas existentes para poder realizar de una forma correcta la
construcción del mismo, ya que si no se conoce el correcto uso de las piezas
puede generar errores en el movimiento, así como posibles fallas internas del
robot.
Se realizó las metodologías de investigación y la metodología de construcción
y diseño de robots autónomos y se constató su validez experimental con lo que
se concluye que la actual propuesta es válida para aplicarse como
complemento de la enseñanza de robótica en Uniandes extensión Tulcán
Los resultados obtenidos del funcionamiento del robot humanoide mediante la
manipulación del software son los esperados, viendo así el correcto
funcionamiento del mismo con sus respectivos sensores y motores puestos en
funcionamiento.
63
Conclusiones Generales
El propósito principal del presente tema investigativo consiste despertar interés
en desarrollar temas de investigación; utilizando esta plataforma robótica robusta
y accesible a cualquier entorno, puesto que se ha desarrollado un robot
humanoide que cumple con todos los objetivos planteados. De tal forma que esta
plataforma es lo más fácil y atractiva para el usuario de manipular, mediante
controles mecánicos, electrónicos, dispositivos móviles y de software. El
producto final presentado es una plataforma con distintas formas de control
inalámbrico y de aplicaciones variadas para el usuario.
Se utilizó una plataforma potente y asequible desarrollada por la empresa Lego
en la construcción del robot humanoide, comprobando satisfactoriamente el
control del robot para que cumpla con éxito los diferentes movimientos deseados.
Las características y la interfaz gráfica que posee permiten ordenar al robot
ciertos movimientos de manera fácil y eficiente las mismas que son grabadas en
la memoria interna del módulo.
Con la implementación del robot humanoide se trata de concientizar a las
autoridades de la universidad en brindar los medios necesarios para el estudio
de la electrónica y la robótica, con la necesidad de preparar a los estudiantes
para desempeñar funciones en una sociedad cada vez más tecnológica por lo
que se hace necesario nuevas competencias y habilidades para enfrentar las
exigencias y necesidades de la sociedad actual.
Luego de validar por la vía de expertos es necesario que los estudiantes
desarrollen proyectos tecnológicos programando dispositivos que simulen
situaciones reales de la vida cotidiana, su uso contribuye a integrar de manera
experimental creaciones propias en el mundo de la robótica, la tecnología y la
electrónica.

64
Recomendaciones
Para el diseño del robot humanoide los estudiantes deben tener en cuenta
todos los elementos que se dispone con el fin de evitar cambios repentinos por
falta de ciertas piezas o dispositivos.
En el ensamblaje o armazón de la estructura del robot se debe tomar en
cuenta las características del material a utilizar verificando que sea
manipulable, liviano y asegurándose que tenga un peso acorde a las
dimensiones y características de los servomotores.
La aplicación y uso de la robótica en la carrera de Ingeniería en Sistemas de
las Universidades del país, les permite que esta área se conviertan en
generadora de procesos productivos de enseñanza aprendizaje, mediante el
uso intensivo de las nuevas herramientas tecnológicas como estrategia
tecnológica didáctica, por lo expuesto anteriormente se considera
indispensable que se implemente un laboratorio en esta área con la finalidad
de que los estudiantes puedan realizar temas y proyectos de investigación
referentes a robótica y electrónica.
Dentro de la malla curricular se deben incluir materias que propongan
completamente la programación robótica y el ensamblaje de prototipos de
robots, como estímulo para fomentar nuevos conocimientos y habilidades en
estudiantes de la carrera de Ingeniería en Sistemas.
65
BIBLIOGRAFÍA
Aguilar, Luis, (2010), Ingeniería Electrónica, Cuenca-Ecuador.
Angulo, Usategui, J.M. & Romero Yesa, S. & Angulo Martínez, I. (2005),
Introducción a la Robótica: Principios técnicos, construcción y programación de
un robot educativo, Ediciones Paraninfo, S.A., 448 págs.
Barrientos Cruz, Antonio, (2012),Fundamentos de Robótica, España
Benítez, Antonio, (2013), Fundamentos de Inteligencia Artificial 3, España.
Colimba, Emma, (2013), Avances Tecnológicos Informáticos,
http://avancesi.blogspot.com/
El Mundo De Los Robots (2011), http://robots.linti.unlp.edu.ar/img_auth.php/
Fanny Méndez, (2012), Avances Tecnológico de Robótica e Inteligencia
Artificial, http://avancestecnologicosderobotica.blogspot.com
Hernández, Roberto, (2010), Metodología de la Investigación, México.
José, Angulo, (2009), Introducción a la robótica. principios teóricos,
construcción y programación de un robot educativo, Madrid
Niku, Saeed Benjamin. (2010). Introduction to Robotics: Analysis, Control,
Applications. United States of América,
Pastor, Jorge, (2014), El Horizonte del Control y la Robótica, España.
Rentería Bilbao, Arantxa, (2012), Robótica Industrial, Fundamentos Y
aplicaciones, España.
Reyes Cortes, Fernando. (2011). Electrónica Digital: Control de robots
manipuladores, Barcelona España. Marcombo S.A., 312 págs.

66
Sabino, Carlos, (2010), Metodología de la Investigación, Tercera Edición,
Ecuador
Serna, Antonio, (2013), guía práctica de sensores, México.
Serna, Antonio, &, Ros, Francisco, &, Rico, Juan, (2010), Guía práctica de
Sensores, España
Software de Desarrollo de Sistemas NI LabVIEW, (2014)
http://www.ni.com/labview/esa/
Uniandes, (2012), Manual de Investigación, Ambato.
Wikipedia, Jimmy Wales. (2010), Tres leyes de la robótica.
http://es.wikipedia.org/wiki/Tres_leyes_de_la_rob%C3%B3tica#La_ley_cero
Wikipedia, Jimmy Wales. Lego Mindstorms. (2011),
http://es.wikipedia.org/wiki/Lego_Mindstorms

ANEXOS

TABLA DE ANEXOS
Anexo Nº01: Carta De Aprobación De Tesis
Anexo Nº02: Formulario De Encuesta
Anexo Nº03: Ficha De Validación
Anexo Nº04: Manual De Usuario
Anexo Nº05: Manual Técnico
Anexo Nº06: Fotografías
Anexo Nº07: Artículo Cientifico
ANEXO Nº01: CARTA DE APROBACIÓN DE TESIS

ANEXO Nº02: FORMULARIO DE ENCUESTA
UNIVERSIDAD REGIONAL AUTÓNOMA DE LOS ANDES
“UNIANDES”
FACULTAD DE SISTEMAS MERCANTILES
CARRERA DE SITEMAS INFORMÁTICOS.
Participantes: Estudiantes de la carrera de Sistemas de la Universidad Uniandes,
sede Tulcán.
Encuestador: Bolaños Benavides Jhonny Fernando 040164474-5
Objetivo: Recopilar Información necesaria para analizar y justificar el presente
tema de tesis.
1. ¿Usted como estudiante de la carrera de sistemas en la universidad tiene
conocimientos que se han desarrollado proyectos de robótica?
o SI
o NO
.
2. ¿Usted está de acuerdo que en la Universidad Uniandes extensión Tulcán
se implemente un laboratorio de Robótica?
o Sí.
o No.
3. ¿Usted como estudiante de Uniandes ha participado en algún proyecto
dirigido a robótica?
o Sí.
o No.

4. ¿Usted cómo califica la enseñanza de la materia de robótica en la
universidad Uniandes extensión Tulcán?
o Excelente
o Muy Bueno
o Bueno
o Regular
5. ¿Usted como estudiante de sistemas le gustaría diseñar y programar sus
propios Robots en la asignatura de Robótica?
o SI
o NO
6. : ¿Usted considera que en la construcción y programación de los robots los
estudiantes ponen en práctica sus conocimientos adquiridos?
o SI
o NO
7. : ¿Según su criterio la implementación de un robot humanoide en la
Universidad Uniandes extensión Tulcán seria?
o Oportuno
o Poco oportuno
o Nada oportuno
ANEXO Nº04: SOLICITUD DE VALIDACIÓN
UNIVERSIDAD REGIONAL AUTÓNOMA DE LOS ANDES
“UNIANDES”
FACULDAD DE SISTEMAS MERCANTILES.
CARRERA DE SISTEMAS INFORMÁTICOS.
Ing. Javier Guancha
Docente.
Presente.
De mis consideraciones:
Reciba un cordial y atento saludo. El motivo del presente, es para solicitarle de la
manera más comedida su valiosa opinión sobre un Robot Humanoide autómata
programado para contribuir al desarrollo de aplicaciones tecnológicas en
Uniandes Tulcán. Por su gentil colaboración con la presente, anticipo mis sinceros
agradecimientos.
--------------------
Atentamente
Jhonny Bolaños
C.I Nº: 040164474-5

UNIVERSIDAD REGIONAL AUTÓNOMA DE LOS ANDES
“UNIANDES”
FACULDAD DE SISTEMAS MERCANTILES.
CARRERA DE SISTEMAS INFORMÁTICOS.
Ing. Daniel Rodríguez
Asistente de Telemática
Presente.
De mis consideraciones:
Reciba un cordial y atento saludo. El motivo del presente, es para solicitarle de la
manera más comedida su valiosa opinión sobre un Robot Humanoide autómata
programado para contribuir al desarrollo de aplicaciones tecnológicas en
Uniandes Tulcán. Por su gentil colaboración con la presente, anticipo mis sinceros
agradecimientos.
--------------------
Atentamente
Jhonny Bolaños
C.I Nº: 040164474-5

UNIVERSIDAD REGIONAL AUTÓNOMA DE LOS ANDES
“UNIANDES”
FACULDAD DE SISTEMAS MERCANTILES.
CARRERA DE SISTEMAS INFORMÁTICOS.
Ing. Patricio Quilismal
Gerente NETCOM
Presente.
De mis consideraciones:
Reciba un cordial y atento saludo. El motivo del presente, es para solicitarle de la
manera más comedida su valiosa opinión sobre un Robot Humanoide autómata
programado para contribuir al desarrollo de aplicaciones tecnológicas en
Uniandes Tulcán. Por su gentil colaboración con la presente, anticipo mis sinceros
agradecimientos.
--------------------
Atentamente
Jhonny Bolaños
C.I Nº: 040164474-5
ANEXO Nº05: FICHA DE VALIDACIÓN
UNIVERSIDAD REGIONAL AUTÓNOMA DE LOS ANDES
“UNIANDES”
FACULDAD DE SISTEMAS MERCANTILES.
CARRERA DE SISTEMAS INFORMÁTICOS.
Ficha de validación de un Robot Humanoide autómata programado para contribuir
al desarrollo de aplicaciones tecnológicas en Uniandes Tulcán.
A las personas seleccionadas se les considera expertos en
Datos Informativos:
Nº de cédula:…………………………………………………………………..
Nombres y Apellidos:………………………………………………………….
Título de mayor jerarquía:…………………………………………………….
Institución que labora:…………………………………………………………
Cargo Actual:…………………………………………………………………..
Años de servicio:……………………………………………………………....
Experiencia profesional:……………………………………………………....
Objetivo:
…………………………………………………………………………………………..
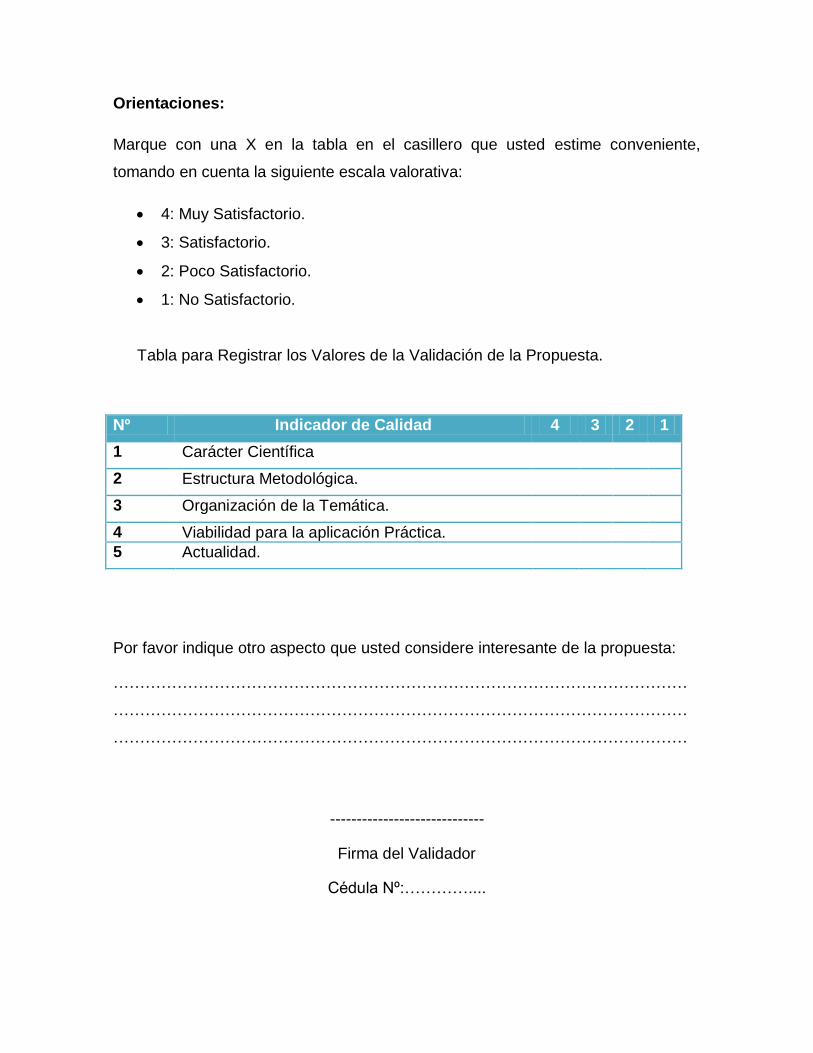
Orientaciones:
Marque con una X en la tabla en el casillero que usted estime conveniente,
tomando en cuenta la siguiente escala valorativa:
4: Muy Satisfactorio.
3: Satisfactorio.
2: Poco Satisfactorio.
1: No Satisfactorio.
Tabla para Registrar los Valores de la Validación de la Propuesta.
Nº Indicador de Calidad 4 3 2 1
1 Carácter Científica
2 Estructura Metodológica.
3 Organización de la Temática.
4 Viabilidad para la aplicación Práctica.
5 Actualidad.
Por favor indique otro aspecto que usted considere interesante de la propuesta:
………………………………………………………………………………………………
………………………………………………………………………………………………
………………………………………………………………………………………………
-----------------------------
Firma del Validador
Cédula Nº:…………....

ANEXO Nº06: MANUAL DE USUARIO
Manual de Usuario
En el presente proyecto se ha utilizado el software de EV3 que presenta una
plataforma grafica de LabView y funciona con el lenguaje G de programación, el
cual es el encargado de controlar el cerebro del dispositivo para realizar las
diferentes ejecuciones de los comandos para su actuación mediante los sensores
instalados en el robot humanoide autómata programado.
Gráfico Nº 21
Descripcion: sensores que componen el robot
Elaborado por: Jhonny Bolaños
Sensor de contacto.
Sensor infrarrojo.
Sensor de color.
El prototipo que se ha construido en un robot humanoide que presenta las
siguientes funciones motrices:
Moverse en todas las direcciones mediante orugas
Diferenciar entre diversos colores
Reconocer obstáculos

Gráfico Nº 22
Descripcion: motor de movimientos
Elaborado por: Jhonny Bolaños
Estas funciones motrices se realizaron con el objetivo de que el robot humanoide
diferencie objetos, actúe según la diferenciación de colores y mueva su brazo
mediante el contacto del medio ambiente.
La forma de guiar el robot humanoide es mediante la codificación del software en
lenguaje G de LabView, o mediante bluetooth con la ayuda de un dispositivo
Smart Device; es decir, que el usuario puede manipular a su gusto los
movimientos del robot humanoide.
Mediante el software de control del dispositivo Smart Device el usuario puede
controlar los diferentes movimientos del robot humanoide, y mediante el sensor de
luz, infrarrojos y de contacto, el robot puede realizar las siguientes acciones:
Movimiento del robot hacia cualquier dirección.
Detección de los diferentes colores para realizar una acción.
De esta forma el robot humanoide puede cumplir diferentes tareas que el usuario
desee mediante el lenguaje de programación EV3-G.
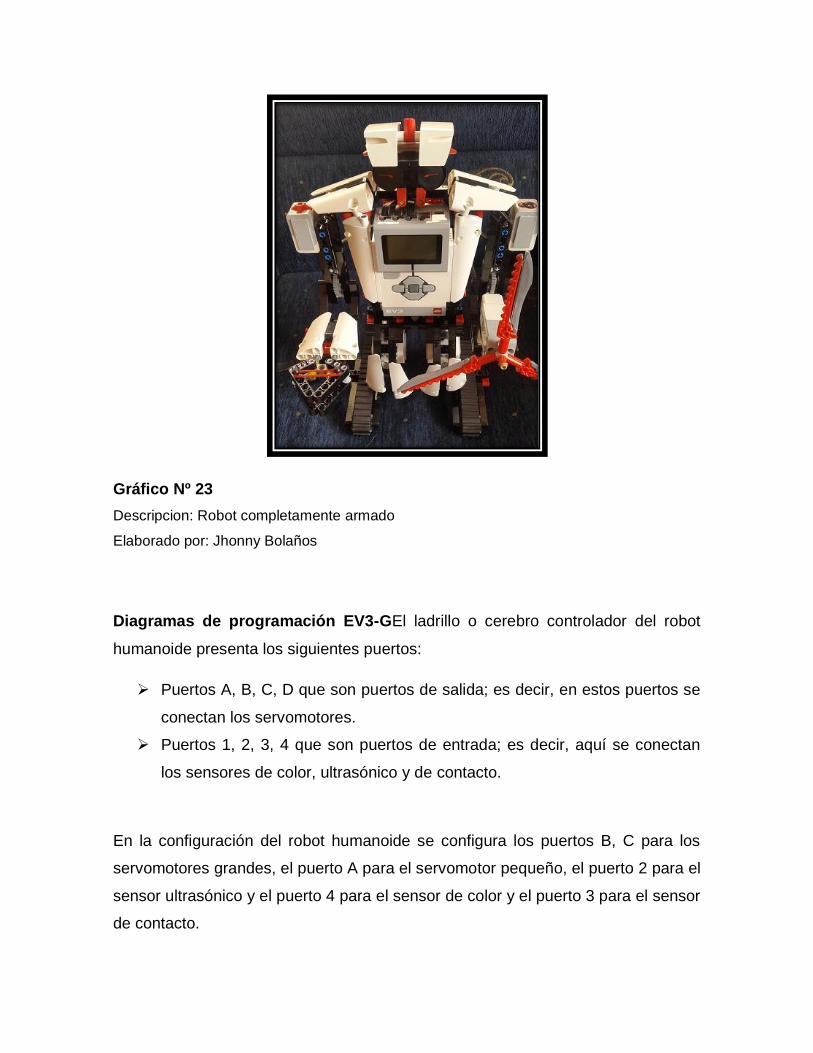
Gráfico Nº 23
Descripcion: Robot completamente armado
Elaborado por: Jhonny Bolaños
Diagramas de programación EV3-GEl ladrillo o cerebro controlador del robot
humanoide presenta los siguientes puertos:
Puertos A, B, C, D que son puertos de salida; es decir, en estos puertos se
conectan los servomotores.
Puertos 1, 2, 3, 4 que son puertos de entrada; es decir, aquí se conectan
los sensores de color, ultrasónico y de contacto.
En la configuración del robot humanoide se configura los puertos B, C para los
servomotores grandes, el puerto A para el servomotor pequeño, el puerto 2 para el
sensor ultrasónico y el puerto 4 para el sensor de color y el puerto 3 para el sensor
de contacto.

Diagrama inicial de configuración del robot
Gráfico Nº 24
Descripcion: bloque de Inicio de acciones
Elaborado por: Jhonny Bolaños
El diagrama indica que cuando el sistema inicia, todos los servomotores se
encuentran detenidos y los sensores no captan ningún valor externo.
Pantalla principal del software para la programación del robot.
Gráfico Nº 25
Descripcion: Insertando bloques de acciones
Elaborado por: Jhonny Bolaños
Para la respectiva programación del robot tenemos que partir añadiendo al
proyecto una acción que realizara el robot, para ello arrastramos a la pantalla
principal el motor que deseamos que se active para luego programarlo de acuerdo
al tiempo o a los grados que se requieran.

Diagrama de configuración de los servos motores de los puertos B y C
Gráfico Nº 26
Descripcion: Insertando movimientos al motor grande
Elaborado por: Jhonny Bolaños
El diagrama muestra la configuración de los servos motores grandes que se
encuentran conectados en los puertos B y C para que el robot se mueva hacia
delante, hacia atrás o para girar en cualquier dirección.
Gráfico Nº 27
Descripcion: Insertando movimiento al servomotor pequeño
Elaborado por: Jhonny Bolaños
Este diagrama muestra la configuración del servo motor pequeño el cual se
encarga de hacer mover el brazo con el fin de quitar objetos cercanos.

Diagrama de configuración del sensor de color
Gráfico Nº 28
Descripcion: Insertando sensor de color
Elaborado por: Jhonny Bolaños
El diagrama muestra la configuración del sensor de color conectado en el puerto
Nro. 4 el cual se encarga de controlar los motores B y C los cuales le dan el
movimiento al robot humanoide; el sensor de color se encarga de diferenciar entre
los diferentes colores para usar el robot en ciertas tareas que el usuario proponga.
La configuración el sensor se encarga de diferenciar entre los diferentes colores;
entonces con la verificación de cada color, el dispositivo realizará diversas
acciones.
Diagrama de configuración del sensor ultrasónico
El diagrama muestra la configuración del sensor ultrasónico conectado en el
puerto Nro. 2 el cual hace las veces de la vista en el ser humano y se encarga
buscar objetos para establecer la dirección de movimiento del robot humanoide.

Gráfico Nº 29
Fuente: Insertando sensor infrarrojo
Elaborado por: Jhonny Bolaños
Diagrama General de configuración del robot humanoide mediante el sensor
de color.
Gráfico Nº 30
Descripcion: Insertando sensores y motores
Elaborado por: Jhonny Bolaños
El diagrama muestra la configuración del robot humanoide, el cual funciona
de la siguiente manera:
Cuando el programa inicia activa los servomotores grandes para que el
robot se mueva haciendo un giro.
Cuando el robot detecta la presencia de un color actúa según el color.

Si es un color rojo girará a la izquierda, si el color es azul girará a la
derecha, si el color es blanco se moverá hacia delante, si el color es negro
se moverá hacia atrás, etc.
Si el robot humanoide detecta un objeto a cierta distancia, este se mueve
para evitar el objeto.
El dispositivo presenta la facilidad de configurar varios programas a la vez, por lo
que se puede ejecutar el programa deseado en cualquier momento.
Envió de datos al robot
Una vez realizada la respectiva programación de acuerdo a los movimientos y
funcionamientos de los diferentes sensores se procede a guardar el proyecto y
luego se envía al cerebro central del robot para que sea ejecutado sin necesidad
de que esté conectado a la computadora por medio del cable de datos.
En la parte inferior derecha de la pantalla de programación se encuentra el bloque
de conexión del robot a la computadora donde se tiene la opción de ejecutar el
programa y de cargar el proyecto al cerebro central.
Gráfico Nº 31
Fuente: Investigación De Campo
Elaborado por: Jhonny Bolaños

NEXO Nº07: MANUAL TÉCNICO
Manual Técnico
En el presente proyecto se ha utilizado el cerebro EV3 de Mindstorms, el cual
controla 3 servos motores encargados del movimiento del robot humanoide y tres
sensores que son el de luz, infrarrojos y de contacto; el cerebro EV3 es un
dispositivo de alto rendimiento que sirve para crear diversos proyectos de manera
didáctica.
A continuación se presentan los esquemas electrónicos del cerebro EV3
conjuntamente con los diagramas de los sensores.
Gráfico Nº 32
Descripcion: Circuito del cerebro central
Elaborado por: Jhonny Bolaños
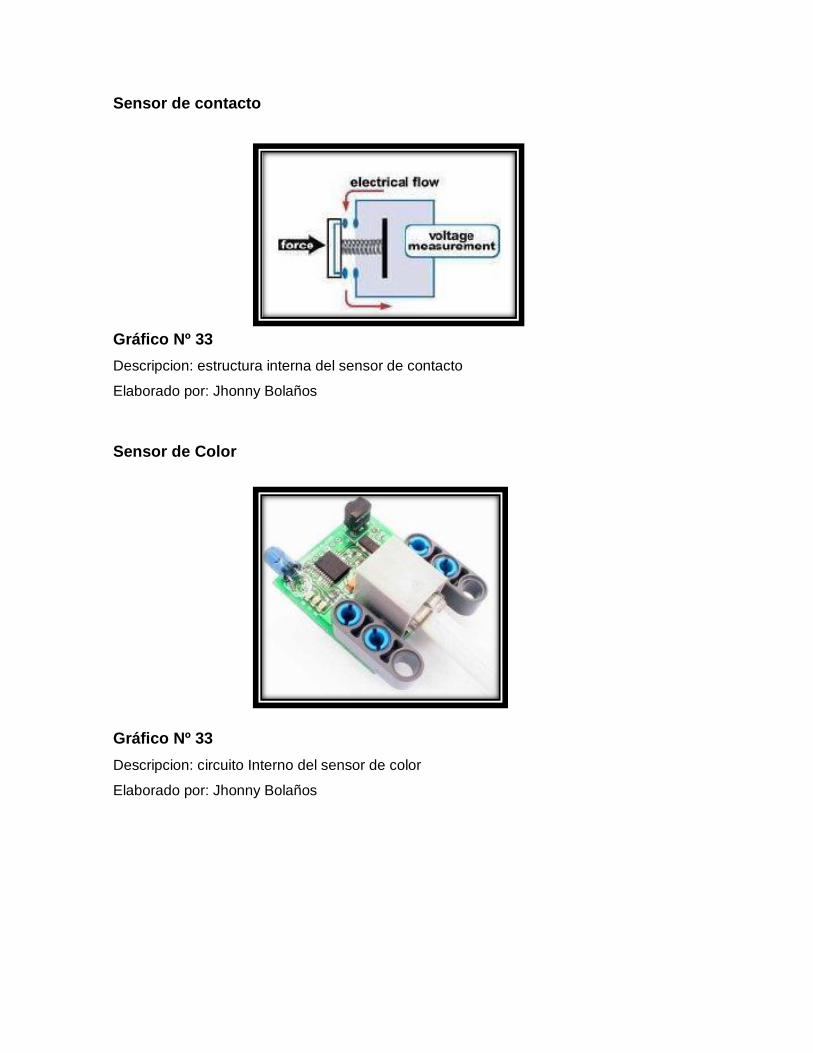
Sensor de contacto
Gráfico Nº 33
Descripcion: estructura interna del sensor de contacto
Elaborado por: Jhonny Bolaños
Sensor de Color
Gráfico Nº 33
Descripcion: circuito Interno del sensor de color
Elaborado por: Jhonny Bolaños
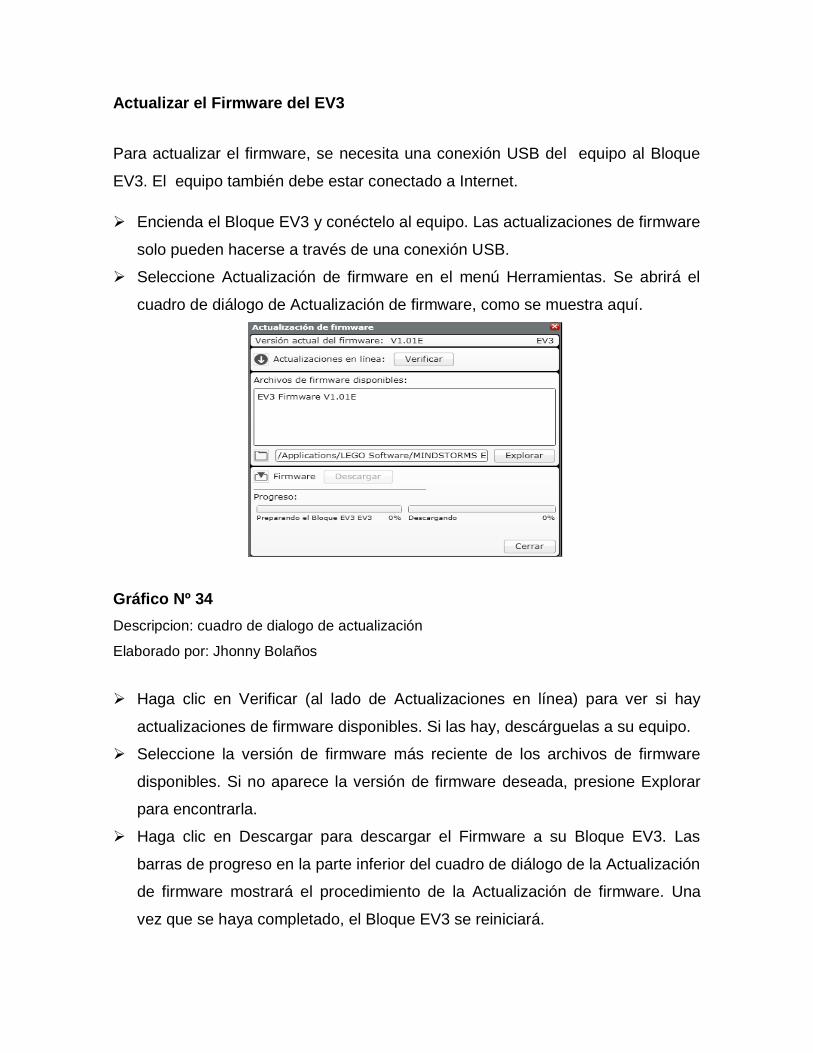
Actualizar el Firmware del EV3
Para actualizar el firmware, se necesita una conexión USB del equipo al Bloque
EV3. El equipo también debe estar conectado a Internet.
Encienda el Bloque EV3 y conéctelo al equipo. Las actualizaciones de firmware
solo pueden hacerse a través de una conexión USB.
Seleccione Actualización de firmware en el menú Herramientas. Se abrirá el
cuadro de diálogo de Actualización de firmware, como se muestra aquí.
Gráfico Nº 34
Descripcion: cuadro de dialogo de actualización
Elaborado por: Jhonny Bolaños
Haga clic en Verificar (al lado de Actualizaciones en línea) para ver si hay
actualizaciones de firmware disponibles. Si las hay, descárguelas a su equipo.
Seleccione la versión de firmware más reciente de los archivos de firmware
disponibles. Si no aparece la versión de firmware deseada, presione Explorar
para encontrarla.
Haga clic en Descargar para descargar el Firmware a su Bloque EV3. Las
barras de progreso en la parte inferior del cuadro de diálogo de la Actualización
de firmware mostrará el procedimiento de la Actualización de firmware. Una
vez que se haya completado, el Bloque EV3 se reiniciará.
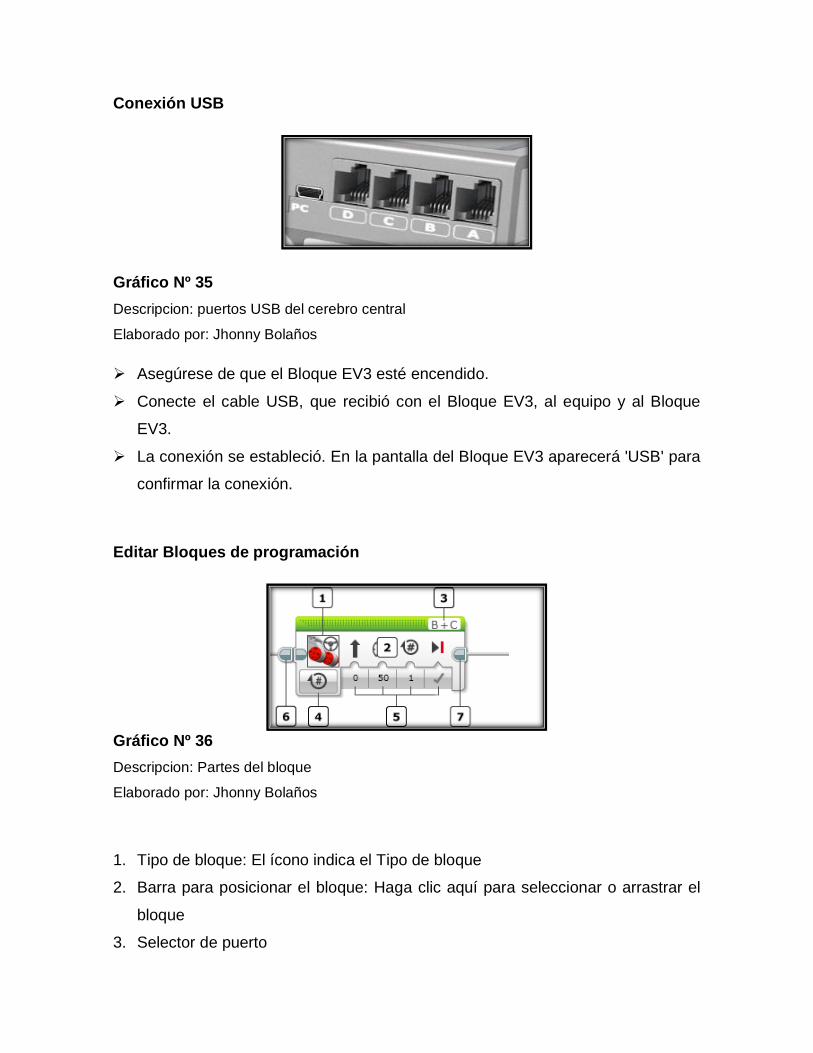
Conexión USB
Gráfico Nº 35
Descripcion: puertos USB del cerebro central
Elaborado por: Jhonny Bolaños
Asegúrese de que el Bloque EV3 esté encendido.
Conecte el cable USB, que recibió con el Bloque EV3, al equipo y al Bloque
EV3.
La conexión se estableció. En la pantalla del Bloque EV3 aparecerá 'USB' para
confirmar la conexión.
Editar Bloques de programación
Gráfico Nº 36
Descripcion: Partes del bloque
Elaborado por: Jhonny Bolaños
1. Tipo de bloque: El ícono indica el Tipo de bloque
2. Barra para posicionar el bloque: Haga clic aquí para seleccionar o arrastrar el
bloque
3. Selector de puerto
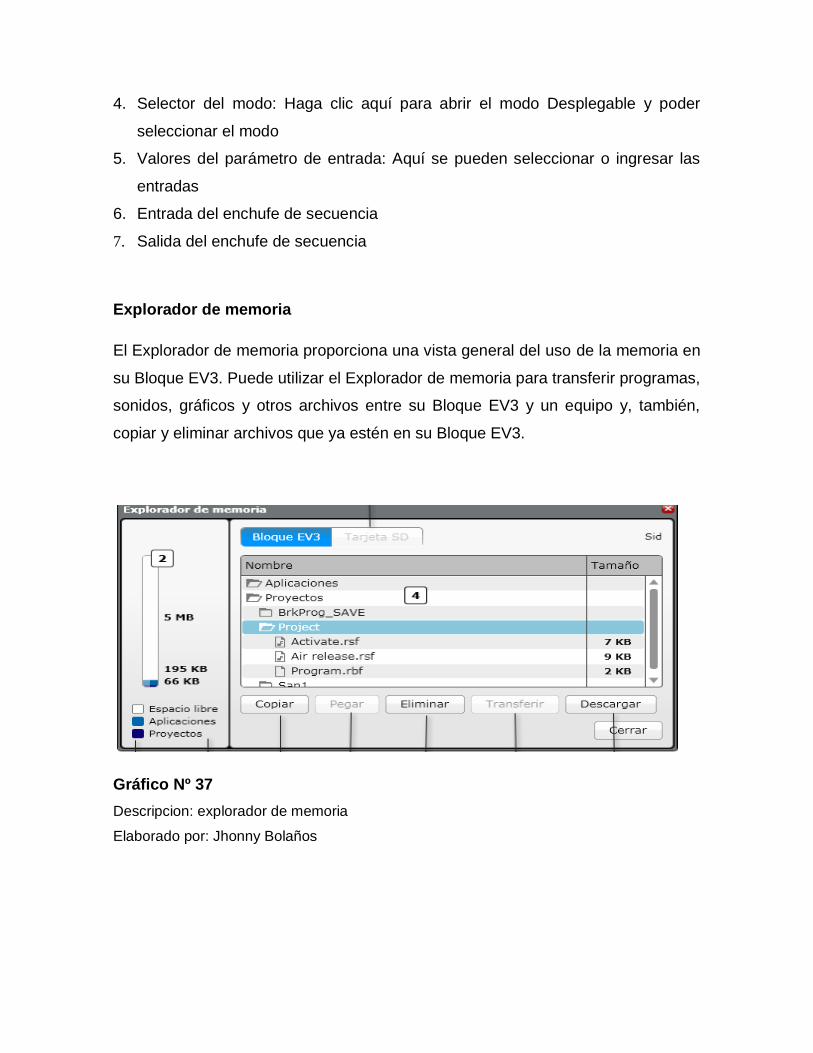
4. Selector del modo: Haga clic aquí para abrir el modo Desplegable y poder
seleccionar el modo
5. Valores del parámetro de entrada: Aquí se pueden seleccionar o ingresar las
entradas
6. Entrada del enchufe de secuencia
7. Salida del enchufe de secuencia
Explorador de memoria
El Explorador de memoria proporciona una vista general del uso de la memoria en
su Bloque EV3. Puede utilizar el Explorador de memoria para transferir programas,
sonidos, gráficos y otros archivos entre su Bloque EV3 y un equipo y, también,
copiar y eliminar archivos que ya estén en su Bloque EV3.
Gráfico Nº 37
Descripcion: explorador de memoria
Elaborado por: Jhonny Bolaños

ANEXO Nº08: FOTOGRAFÍAS
Gráfico Nº 38
Fuente: Fotografía del cerebro central
Elaborado por: Jhonny Bolaños
Gráfico Nº 39
Fuente: Fotografía del sensor de infrarrojo
Elaborado por: Jhonny Bolaños

Gráfico Nº 40
Fuente: Fotografía del sensor de color
Elaborado por: Jhonny Bolaños
Gráfico Nº 41
Fuente: Fotografía del sensor de contacto
Elaborado por: Jhonny Bolaños
Gráfico Nº 42
Fuente: Fotografía de los motores pequeños
Elaborado por: Jhonny Bolaños
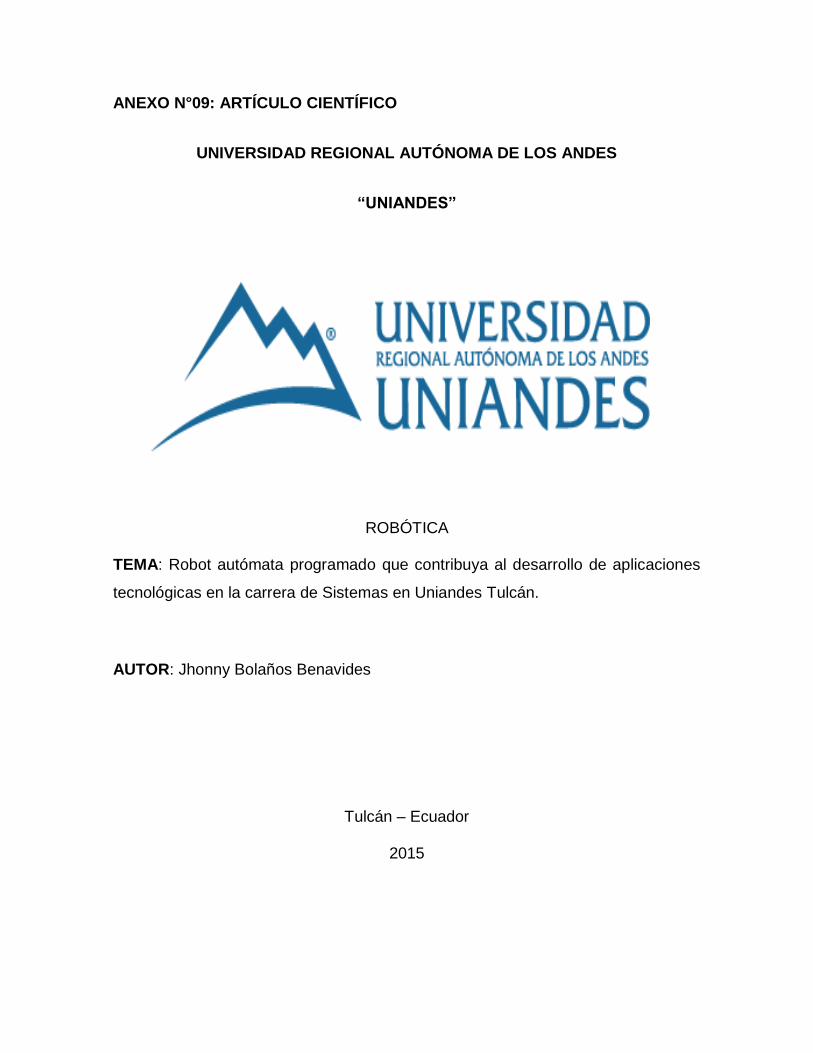
ANEXO N°09: ARTÍCULO CIENTÍFICO
UNIVERSIDAD REGIONAL AUTÓNOMA DE LOS ANDES
“UNIANDES”
ROBÓTICA
TEMA: Robot autómata programado que contribuya al desarrollo de aplicaciones
tecnológicas en la carrera de Sistemas en Uniandes Tulcán.
AUTOR: Jhonny Bolaños Benavides
Tulcán – Ecuador
2015

Desarrollo de aplicaciones Tecnológicas en la Universidad Uniandes
extensión Tulcán
Johny Fernando Bolaños Benavides, Universidad Regional Autónoma
de los Andes Uniandes – Tulcán, Tulcán – Ecuador,
RESUMEN
El presente trabajo dedica buena parte de su contenido, a abordar aquello que
constituye al desarrollo y programación de un Robot Autómata, el cual contribuirá
en el desarrollo de aplicaciones tecnológicas en la carrera de Sistemas en
Uniandes Tulcán.
La base para esta investigación es la automatización, control y robótica. Uno de
los objetivos del avance tecnológico de los últimos años ha sido el desarrollo de
dispositivos que se asemejen y se comporten como humanos. En 1921 Karel
Kapek planteó la idea de un verdadero hombre artificial, un robot, palabra derivada
del checo “robota” que significa esclavo. Desde entonces, en particular desde los
años 50 del siglo pasado, después de tres generaciones de robots, la robótica ha
evolucionado hasta alcanzar en diferentes ramas un elevado nivel de madurez:
robots industriales, robots móviles con ruedas, robots con patas, prótesis médicas,
micro-robots, con una gran variedad de posibles y reales aplicaciones. Sin
embargo, aunque los avances científicos y tecnológicos han sido muchos, todavía
no se puede hablar de sistemas verdaderamente autónomos con capacidad de
tomar decisiones inteligentes.
Es importante resaltar que el propósito fundamental es que los alumnos necesitan
para su futuro profesional de la utilización de los medios tecnológicos, ya que
varían enormemente en su habilidad de percepción y aprendizaje; por lo tanto, en
los requerimientos didácticos individuales. Algunos aprenden fácil y rápidamente a
través de informaciones orales o impresas y con un mínimo de experiencias más
directas. La mayoría requiere experiencias más concretas que incluyan los medios
físicos.
Está absolutamente comprobado que el uso de material didáctico mejora el
aprendizaje de los alumnos y al mismo tiempo reduce el tiempo de instrucción y
los costos de la enseñanza.
Palabras Claves: autómata, dispositivos, artificial, robótica didácticos,
aprendizaje.

ABSTRACT
The present work dedicates good part of its content, to approach that that
constitutes to the development and programming of a Robot automaton, which will
contribute in the development of technological applications in the career of
Systems in Uniandes Tulcán.
The base for this investigation is the automation, control and robotics.
One of the objectives of the technological advance of the last years has been the
development of devices that you/they resemble each other and behave as human.
In 1921 Karel Kapek outlined the idea of a true artificial man, a robot, derived word
of the Czech "robota" that slave means. From then on, in particular from the years
50 of last century, after three generations of robots, the robotics has evolved until
reaching in different branches a high level of maturity: industrial robots, mobile
robots with wheels, robots with paws, medical prosthesis, micro-robots, with a
great variety of possible and real applications. However, although the scientific and
technological advances have been many, one cannot still speak of truly
autonomous systems with capacity of making intelligent decisions.
It is important to stand out that the fundamental purpose is that the students need
for its professional future of the use of the technological means, since they vary
vastly in its ability of perception and learning; therefore, in the requirements
didactic singular. Some learn easy and quickly through oral or printed information’s
and with a minimum of more direct experiences. Most requires more concrete
experiences that include the physical means.
It is absolutely proven that the use of material didactic improvements the learning
of the students and at the same time it reduces the time of instruction and the costs
of the teaching.
Key words: robot, devices, artificial, didactic robotics, learning.
Introducción
En la actualidad la universidad está dedicada a brindar formación profesional a
bachilleres a través de diversas modalidades de estudio como son presencial y
semipresencial, la extensión Uniandes Tulcán cuenta con tres facultades la
facultad de medicina, jurisprudencia y sistemas mercantiles, ofrece las carreras
de enfermería, derecho, sistemas y contabilidad y auditoría, cuenta con
infraestructura acorde a las necesidades de los estudiantes como laboratorios
equipados con computadoras de última generación. Cuenta con un cuerpo
docente de alto nivel académico, capacitados para brindar una buena formación
profesional, acorde con los avances científicos y tecnológicos.
En el medio social específicamente en la ciudad de Tulcán se puede observar que
no existe una investigación, sobre trabajos realizados anteriormente con el tema
de tesis, En el entorno social se está despertando un amplio interés por el tema
por el cual la Universidad Uniandes en el último año está introduciendo el área de
la robótica y con ello se está contribuyendo en el desarrollo de aplicaciones
tecnológicas orientadas a la robótica. Viendo así la necesidad de elaborar la tesis
de grado.
El propósito de la implementación de un robot humanoide autómata programado
es lograr su aplicación en el desarrollo de procesos industriales aportando así con
conocimientos de robótica electrónica e inteligencia artificial.
La causa para elaborar un robot humanoide autómata programado es fortalecer
con avances tecnológicos, conocimientos teóricos y prácticos a los estudiantes de
Uniandes Tulcán.
Materiales y Metodos
Modalidad de Investigación
La modalidad de la investigación que se utiliza para el desarrollo de la presente
tesis de grado, es de tipo mixto combina a los paradigmas cuantitativo y
cualitativo, que exponen las razones de su utilización a continuación.
El paradigma cuantitativo se lo utiliza por llevar a cabo una investigación de
campo, fundamentada en encuestas o entrevistas, las mismas que son aplicadas
a una muestra debidamente seleccionada de la población motivo de estudio, para
los cuales se tabulan los datos en forma numérica y se presentan en gráficas
estadísticos, estos instrumentos han sido aplicados en encuestas realizadas en la
carrera de Sistemas de Uniandes Tulcán, además del análisis estadístico de los
datos obtenidos.
En el Paradigma Cualitativo se presenta una orientación interpretativa de los
resultados y de la realidad, se lo emplea por la utilización de métodos teóricos de
investigación, los mismos que permiten el análisis de la información teórica
presentada en la tesis en el presente tema de investigación los datos adquiridos
en las encuestas se los interpreta como la necesidad de implementar un
laboratorio de robótica, el cual ayudara a los estudiantes de la carrera de Sistemas
de la Universidad Regional Autónoma de los Andes de la ciudad de Tulcán a
adquirir estos conocimientos e impulse a la creación y programación de robots.
Tipos de Investigación.
Los tipos de investigación empleados para el desarrollo de este trabajo de grado
son:
Investigación Bibliográfica
En la investigación bibliográfica se desarrolla la elaboración del marco teórico, ya
que se encuentra sustentado por diversas fuentes de investigación bibliográfica
tales como libros, revistas e internet.
Investigación Aplicada
Esta investigación se la encuentra en el desarrollo del robot humanoide autómata
programado, ya que se aplicó los conocimientos adquiridos en el transcurso del
nivel académico.
Investigación Descriptiva.
Se realiza el desarrollo de la investigación Descriptiva para examinar las
características del problema, describir, analizar e interpretan los datos obtenidos,
en términos claros y precisos.
Investigación de Campo.
En la investigación de campo se realiza la aplicación de encuestas a la muestra
representativa de la población objeto de estudio, es decir a los estudiantes que se
encuentran interactuando de forma directa de la Carrera de Sistemas de
Uniandes Tulcán.
Técnicas de investigación.
Encuesta
Fue aplicada con la finalidad de obtener datos estadísticos relacionados a los
diferentes aspectos tratados. Con la aplicación de esta técnica se obtuvo diversos
puntos de vista que aportaron las personas entendidas en la materia que hemos
tratado en el presente trabajo investigativo.
OBJETIVOS
OBJETIVO GENERAL
Implementar un robot humanoide autómata programado para contribuir al
desarrollo de aplicaciones tecnológicas en la carrera de Sistemas en Uniandes
Tulcán.
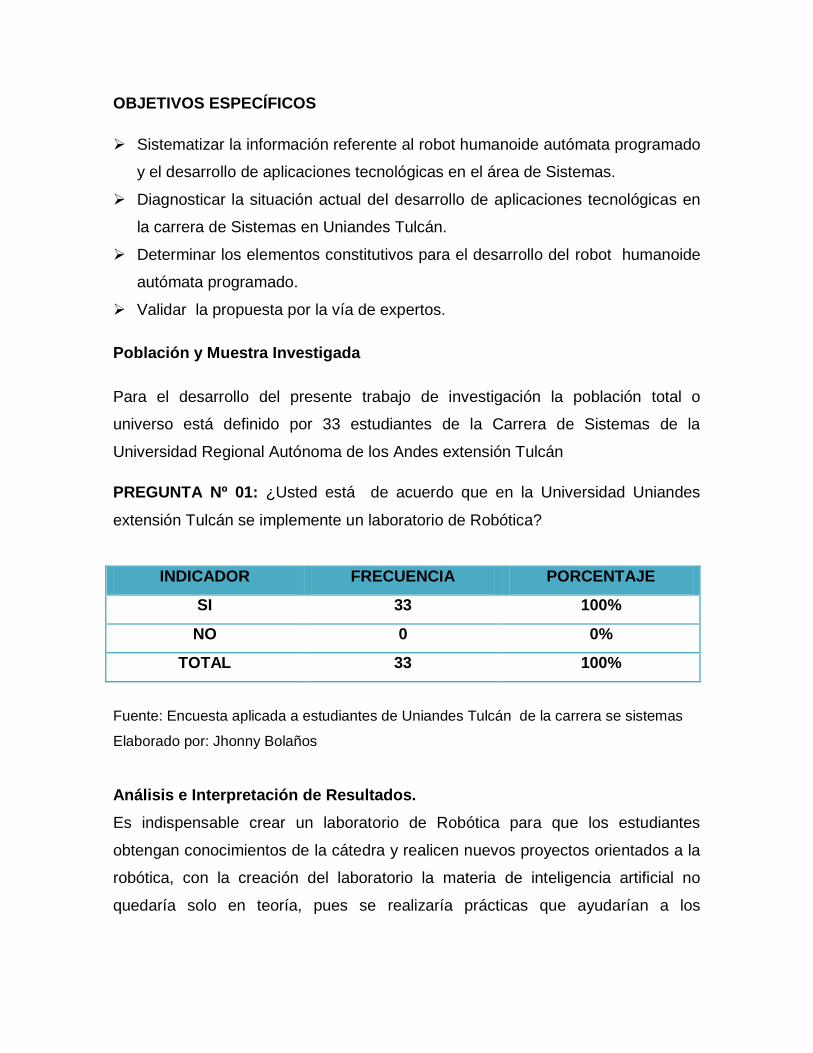
OBJETIVOS ESPECÍFICOS
Sistematizar la información referente al robot humanoide autómata programado
y el desarrollo de aplicaciones tecnológicas en el área de Sistemas.
Diagnosticar la situación actual del desarrollo de aplicaciones tecnológicas en
la carrera de Sistemas en Uniandes Tulcán.
Determinar los elementos constitutivos para el desarrollo del robot humanoide
autómata programado.
Validar la propuesta por la vía de expertos.
Población y Muestra Investigada
Para el desarrollo del presente trabajo de investigación la población total o
universo está definido por 33 estudiantes de la Carrera de Sistemas de la
Universidad Regional Autónoma de los Andes extensión Tulcán
PREGUNTA Nº 01: ¿Usted está de acuerdo que en la Universidad Uniandes
extensión Tulcán se implemente un laboratorio de Robótica?
INDICADOR FRECUENCIA PORCENTAJE
SI 33 100%
NO 0 0%
TOTAL 33 100%
Fuente: Encuesta aplicada a estudiantes de Uniandes Tulcán de la carrera se sistemas
Elaborado por: Jhonny Bolaños
Análisis e Interpretación de Resultados.
Es indispensable crear un laboratorio de Robótica para que los estudiantes
obtengan conocimientos de la cátedra y realicen nuevos proyectos orientados a la
robótica, con la creación del laboratorio la materia de inteligencia artificial no
quedaría solo en teoría, pues se realizaría prácticas que ayudarían a los

estudiantes a comprender mejor el funcionamiento de partes indispensables de un
robot, como sensores, servomotores y la programación de robots.
PREGUNTA Nº 02: ¿Usted como estudiante de sistemas le gustaría diseñar y
programar sus propios Robots en la asignatura de Robótica?
INDICADOR FRECUENCIA PORCENTAJE
SI 30 90%
NO 3 10%
TOTAL 33 100%
Tabla Nº 06
Fuente: Encuesta aplicada a estudiantes de Uniandes Tulcán de la carrera se sistemas
Elaborado por: Jhonny Bolaños
Análisis e Interpretación de Resultados.
A los estudiantes de la Carrera de Sistemas les gustaría diseñar robots por lo
tanto se debe implementar un laboratorio de Robótica equipado y el personal
docente debe actualizar sus conocimientos para así preparar y guiar a los
estudiantes en temas de electrónica y robótica, los estudiantes están interesados
en que se apique una cátedra de robótica y con la implementación de un
laboratorio podrán construir y programar pequeños robots, lastimosamente en la
Universidad se brinda la cátedra de programación pero no orientado a robótica.
Procedimiento para la construcción del robot
Funcionamiento de un Robot
La automatización es un sistema donde se trasfieren tareas de producción,
realizadas habitualmente por operadores humanos a un conjunto de elementos
tecnológicos.
Un sistema automatizado consta de dos partes principales:

Parte de Mando.
Parte Operativa.
La Parte Operativa es la parte que actúa directamente sobre la máquina. Son los
elementos que hacen que la máquina se mueva y realice la operación deseada.
Los elementos que forman la parte operativa son los accionadores de las
máquinas como motores, cilindros, compresores y los captadores como
fotodiodos, finales de carrera.
La Parte de Mando suele ser un autómata programable (tecnología programada),
aunque hasta hace bien poco se utilizaban relés electromagnéticos, tarjetas
electrónicas o módulos lógicos neumáticos (tecnología cableada). En un sistema
de fabricación automatizado el autómata programable está en el centro del
sistema. Este debe ser capaz de comunicarse con todos los constituyentes de
sistema automatizado.
Sensores
Un sensor es un dispositivo capaz de detectar magnitudes físicas o químicas,
llamadas variables de instrumentación, y transformarlas en variables eléctricas.
Las variables de instrumentación pueden ser por ejemplo: temperatura, intensidad
lumínica, distancia, aceleración, inclinación, desplazamiento, presión, fuerza,
torsión, humedad, movimiento, pH, etc. Una magnitud eléctrica puede ser una
resistencia eléctrica (como en una RTD), una capacidad eléctrica (como en
un sensor de humedad), una Tensión eléctrica (como en un termo par),
una corriente eléctrica (como en un fototransistor), etc.
Un sensor se diferencia de un transductor en que el sensor está siempre en
contacto con la variable de instrumentación con lo que puede decirse también que
es un dispositivo que aprovecha una de sus propiedades con el fin de adaptar la
señal que mide para que la pueda interpretar otro dispositivo. Como por ejemplo
el termómetro de mercurio que aprovecha la propiedad que posee el mercurio de

dilatarse o contraerse por la acción de la temperatura. Un sensor también puede
decirse que es un dispositivo que convierte una forma de energía en otra.
Discusión
La revolución tecnológica ha permitido que no existan barreras geográficas a
través de la utilización de la tecnología actual basada en electrónica y robótica.
Existe un intercambio cultural entre todos los seres humanos. Las naciones tienen
tendencia hacia la implementación y uso de las últimas tecnologías y por ende dar
paso a la automatización de varios sectores socioeconómicos aumentando la
seguridad ciudadana y reduciendo costos.
Estamos viviendo en una sociedad del conocimiento e información, esto obliga a
que las empresas e instituciones se organicen; los países que no se involucren en
este cambio permanecerán desconectados.
Países desarrollados prosperan, dejando a los pequeños fuera de competencia, ya
que sus multinacionales crecen mientras quiebran las empresas nacionales,
provocando desempleo, dando lugar a mano de obra de bajo costo, ya que las
industrias contratan más inmigrantes a los que les pagan salarios menores.
Las brechas digitales, son las barreras que tiene que vencer la sociedad de la
información, existen siempre desigualdades, hay países desarrollados que tienen
acceso a la tecnología, crean proyectos tecnológicos importantes que involucran
electrónica y robótica, y otros países subdesarrollados que les falta infraestructura
por lo que este tipo de proyectos son inaccesibles, esto provoca un retraso tanto a
nivel tecnológico como también a nivel económico, cultural, social, político, de
formación y en el aspecto educativo que es el reflejo de los pueblos.

Conclusiones
Incentivar a los estudiantes de la Carrera de Sistemas de Uniandes Tulcán a
realizar proyectos orientados a la cátedra de Robótica.
Es oportuno y necesario crear un laboratorio de Robótica en la Universidad
Regional Autónoma de los Andes extensión Tulcán ya que los estudiantes
obtendrán conocimientos acertados de la cátedra y desarrollarán nuevos
proyectos orientados a nuevas líneas de investigación.
Capacitar a docentes en el área de Electrónica y Robótica para poder ampliar
conocimientos en estas estas ramas a los estudiantes de la Carrera de
Sistemas de Uniandes Tulcán.
Recomendaciones
Crear el laboratorio de Robótica en la Universidad Uniandes – Tulcán para que
los estudiantes de la carrera realicen sus prácticas y orientes la creación de
nuevos proyectos hacia la Robótica y automatización de procesos.
Implementar cursos de actualización en el área de Robótica y electrónica
dirigido a los docentes de la carrera de sistemas en Uniandes – Tulcán para
fortalecer los conocimientos e impartir la cátedra de la mejor manera.
Impartir talleres de electrónica y robótica básica para que los estudiantes de la
carrera de sistemas adquieran conocimientos básicos y se orienten al manejo
y desarrollo de proyectos en el área.
Bibliografía
Angulo, Usategui, J.M. & Romero Yesa, S. & Angulo Martínez, I. (2005),
Introducción a la Robótica: Principios técnicos, construcción y programación de
un robot educativo, Ediciones Paraninfo, S.A., 448 págs.
Antonieta, González, (2014), Cómo escribir un artículo científico,
http://www.hotcourseslatinoamerica.com/study-abroad-info/choosing-a-
university/como-escribir-un-articulo-cientifico-o-paper-para-la-universidad
Fanny Méndez, (2012), Avances Tecnológico de Robótica e Inteligencia
Artificial, http://avancestecnologicosderobotica.blogspot.com
José, Angulo, (2009), Introducción a la robótica. principios teóricos,
construcción y programación de un robot educativo, Madrid
Sabino, Carlos, (2010), Metodología de la Investigación, Tercera Edición,
Ecuador
Serna, Antonio, (2013), guía práctica de sensores, México