universidad nacional de colombia sede medellÍn facultad de...
TRANSCRIPT

1
UNIVERSIDAD NACIONAL DE COLOMBIA SEDE MEDELLÍN
FACULTAD DE CIENCIAS-ESCUELA DE FÍSICA
MAESTRÍA EN ENSEÑANZA DE LAS CIENCIAS EXACTAS Y NATURALES
CURSO: ENSEÑANZA DE LA FÍSICA –MECÁNICA-
PRÁCTICA # 6: MOVIMIENTO ARMÓNICO SIMPLE Diego L. Aristizábal R.
Profesor asociado con tenencia de cargo, Escuela de Física de la Universidad Nacional de Colombia, Sede Medellín
Mayo de 2014
Temas
Introducción
Descomposición de un MCU en dos MAS ortogonales
Cronograma de un MAS
Vocabulario en el MAS
Dinámica del MAS: Fuerza recuperadora
Oscilaciones del sistema masa-resorte
Oscilaciones del péndulo simple
Oscilaciones de un péndulo físico
Experimento 1: Cronograma de las oscilaciones de un sistema masa-resorte
Experimento 2: Calibración dinámica de un resorte
Experimento 3: Cronograma de las oscilaciones de un péndulo simple
Experimento 4: Medida de la aceleración de la gravedad usando un péndulo simple
Experimento 5: Cronograma de las oscilaciones de un péndulo físico
Experimento 6: Medida de la aceleración de la gravedad usando un péndulo físico
Experimento 7: Superposición de dos M.A.S ortogonales
Introducción
Para comprender la física del sonido y de la luz es necesario comprender en primera instancia el
movimiento oscilatorio y esencialmente el denominado movimiento armónico simple (MAS). Este será el
objeto de estudio de esta práctica de laboratorio.
Descomposición de un MCU en dos MAS ortogonales
Dada una partícula moviéndose circularmente con velocidad angular constante (MCU) su proyección oscila
con movimiento armónico simple.
Simulación:
Analizar la simulación de SimulPhysics correspondiente a MAS vs MCU Para acceder a ella hacer clic con
el mouse en el ítem señalado en la Figura 1. Se despliega la simulación de la Figura 2. En ésta hacer las
variaciones permitidas y observar detenidamente los resultados.

2
Figura 1
Figura 2
Análisis:
MCU
Una partícula en MCU cumple:
oθ = θ + ω t [1]
En donde θ corresponde a la posición angular en cualquier instante (se mide en radianes), oθ corresponde a
la posición angular inicial (se mide en radianes), ω la velocidad angular (se mide en rad/s) que es constante
y t el tiempo (se mide en s).
Adicionalmente la relación entre la velocidad lineal V y la angular es ω es,
V = ω R [2]
La aceleración centrípeta es,
2a = ω R [3]
Debe recordarse algo MUY IMPORTANTE: el MCU es periódico. El periodo P es el tiempo que se invierte
para que la partícula complete una vuelta y se mide en s. El periodo y la frecuencia f se relacionan a través
de la siguiente expresión,
P f =1 [4]
3
Con base en la definición de periodo la ecuación [1] se transforma en la siguiente ecuación,
2πω = [5]
P
MAS
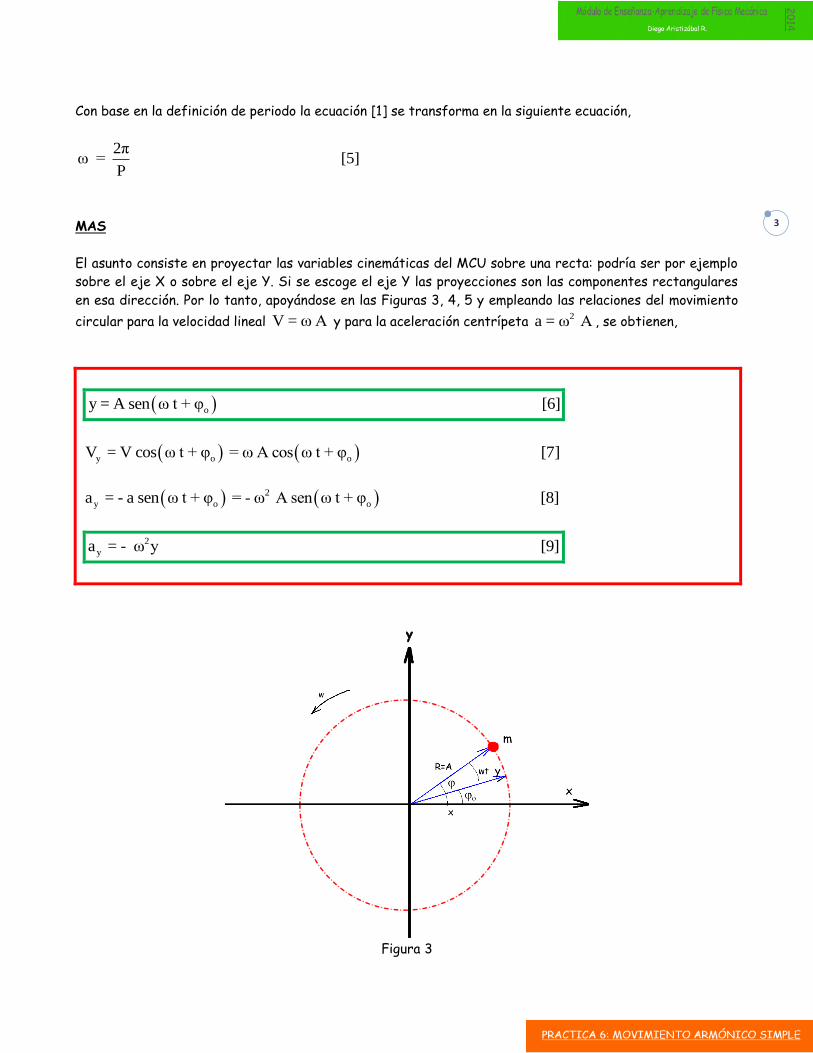
El asunto consiste en proyectar las variables cinemáticas del MCU sobre una recta: podría ser por ejemplo
sobre el eje X o sobre el eje Y. Si se escoge el eje Y las proyecciones son las componentes rectangulares
en esa dirección. Por lo tanto, apoyándose en las Figuras 3, 4, 5 y empleando las relaciones del movimiento
circular para la velocidad lineal V = ω A y para la aceleración centrípeta 2a = ω A , se obtienen,
oy = A sen ω t + φ [6]
y o oV = V cos ω t + φ = ω A cos ω t + φ [7]
2
y o oa = - a sen ω t + φ = - ω A sen ω t + φ [8]
2
ya = - ω y [9]
Figura 3

4
Figura 4
Figura 5
Se ha tomado el radio de la circunferencia como A . En estas últimas ecuaciones, y corresponde a la
elongación del MAS (posición de la partícula oscilante respecto a su posición de equilibrio), yV corresponde
a la velocidad del MAS, ya corresponde a la aceleración del MAS. En estas ecuaciones se observan dos
resultados MUY SIGNIFICATIVOS:

5
Según la ecuación [6] si una partícula que oscila con MAS su “cronograma”, es decir, la
representación de la elongación y vs el tiempo t debe ser una función senosoidal.
Según la ecuación [9] si la partícula oscila con MAS su aceleración debe ser proporcional a su
elongación y adicionalmente debe ser opuesta a ésta: observar que la aceleración no es
constante y apunta siempre a su posición de equilibrio.
En donde y corresponde a la denominada elongación, yV la velocidad y
ya la aceleración del MAS. Estas
son las expresiones cinemáticas básicas del MAS, es decir se concluye que la proyección sobre una recta
de una partícula moviéndose con MCU oscila con MAS.
Un ejemplo de MAS es la oscilación de una masa aoplada a un reortes. En las Figuras 6, 7 y 8 se ilustra el
mismo análisis realizado anteriormente pero con base en la simulación correspondiente a la Figura 2.
Figura 6
Figura 7

6
Figura 8
Si se estudia la proyección del MCU sobre el eje X las ecuaciones [6], [7], [8] y [9] toman la siguiente
forma,
ox = A cos ω t + φ [6']
x o oV = -V sen ω t + φ = - ω A sen ω t + φ [7']
2
x o oa = - a cos ω t + φ = - ω A cos ω t + φ [8']
2
xa = - ω x [9']
Cronograma de una MAS
Recordando: según las ecuaciones [6] y [6’], si una partícula que oscila con MAS su “cronograma”, es decir,
la representación de la elongación y vs el tiempo t debe ser una función senosoidal. En la siguiente
simulación se ilustra claramente esto.
Simulación:
Analizar la simulación de SimulPhysics correspondiente al Cronograma de un MAS. Para acceder a ella
hacer clic con el mouse en el ítem señalado en la Figuras 9. Se despliega la simulación de la Figura 10. En
ésta hacer las variaciones permitidas y observar detenidamente los resultados.

7
Figura 9
Figura 10
En la Figura 11 se ilustra la representación temporal de estas magnitudes elongación, velocidad y
aceleración (para facilidad se asumió oφ = 0 ). Se observa claramente que la elongación (curva verde) y la
aceleración (curva roja) están desfasadas , es decir, están en oposición, tal como lo expresa la ecuación
[9] .
Figura 11
8
Vocabulario en el MAS
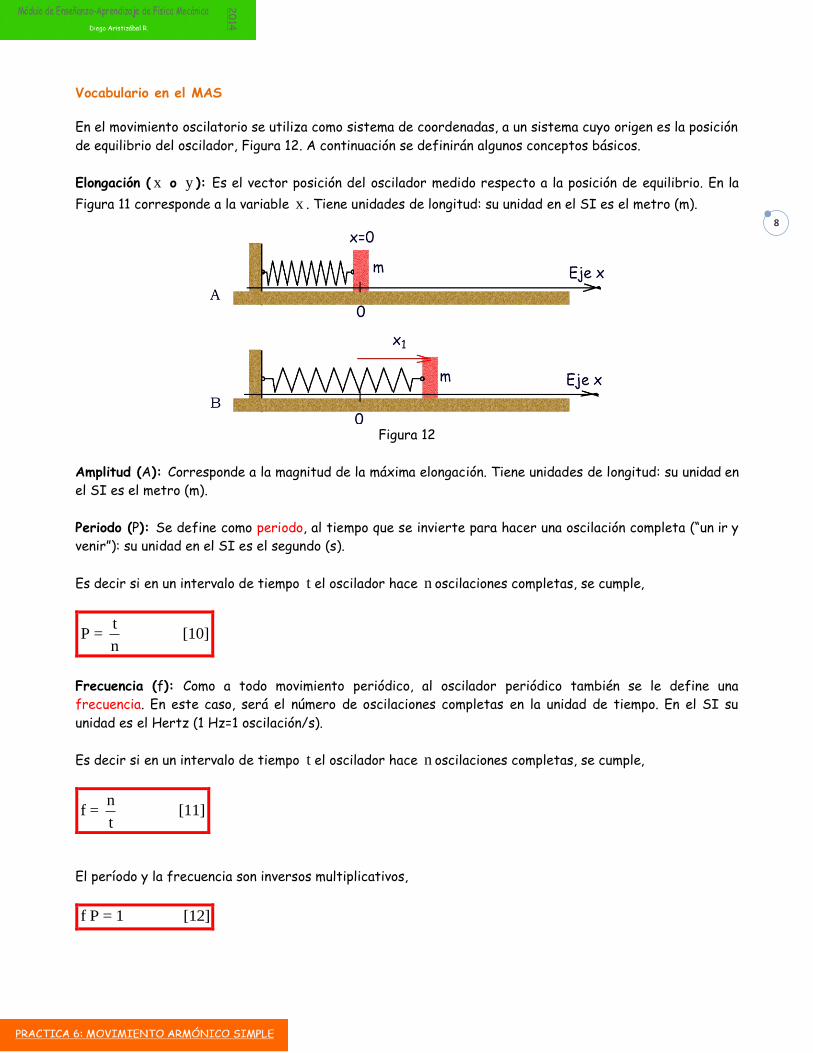
En el movimiento oscilatorio se utiliza como sistema de coordenadas, a un sistema cuyo origen es la posición
de equilibrio del oscilador, Figura 12. A continuación se definirán algunos conceptos básicos.
Elongación ( x o y ): Es el vector posición del oscilador medido respecto a la posición de equilibrio. En la
Figura 11 corresponde a la variable x . Tiene unidades de longitud: su unidad en el SI es el metro (m).
Figura 12
Amplitud (A): Corresponde a la magnitud de la máxima elongación. Tiene unidades de longitud: su unidad en
el SI es el metro (m).
Periodo (P): Se define como periodo, al tiempo que se invierte para hacer una oscilación completa (“un ir y
venir”): su unidad en el SI es el segundo (s).
Es decir si en un intervalo de tiempo t el oscilador hace n oscilaciones completas, se cumple,
tP = [10]
n
Frecuencia (f): Como a todo movimiento periódico, al oscilador periódico también se le define una
frecuencia. En este caso, será el número de oscilaciones completas en la unidad de tiempo. En el SI su
unidad es el Hertz (1 Hz=1 oscilación/s).
Es decir si en un intervalo de tiempo t el oscilador hace n oscilaciones completas, se cumple,
nf = [11]
t
El período y la frecuencia son inversos multiplicativos,
f P = 1 [12]
9
Frecuencia angular ()
En el MAS también se cumple la ecuación [5] del MCU,
2πω = [5]
P
Pero ya se denomina frecuencia angular. La frecuencia f en Hz y la frecuencia angular se relacionan
entonces como,
ω = 2 π f [13]
Fase ( φ ): Un parámetro muy utilizado cuando se están analizando movimientos oscilatorios, es el que
recibe el nombre de fase del oscilador. Recibe este nombre porque determina en que “fase” del movimiento
de “ir y venir” se encuentra la partícula oscilante; por ejemplo, determina si el oscilador en un instante
dado está en su posición de equilibrio, o en uno de los extremos de oscilación, o en otra posición. Este
concepto es un poco abstracto, pero a continuación se dan algunos ejemplos que aclaran su interpretación
física.
Cada que el oscilador hace una oscilación completa, se dice que su fase se ha incrementado en 360º ( 2π radianes). Si el oscilador se suelta desde un extremo, cuando su fase sea de 7π radianes, estará ocupando
la posición del extremo opuesto, y habrá transcurrido un tiempo equivalente a tres períodos y medio, y
además habrá completado tres oscilaciones (completas) y media. Ahora, si dos osciladores se sueltan
simultáneamente de extremos opuestos, se dice que su diferencia de fase es igual a π radianes (se dice
que estos osciladores se encuentran en oposición). Y si se sueltan bajo las mismas condiciones desde la
misma posición, se dice que están en fase.
La fase es,
oφ = ω t + φ [14]
Fase inicial ( oφ ): Corresponde al valor de la fase del oscilador en el instante t=0.
La fase inicial, oφ , y la amplitud, A, dependen de las condiciones iniciales (posición y velocidad iniciales).
Dinámica del MAS: Fuerza recuperadora
Una partícula de masa m que oscila con MAS cumple la ecuación [9],
2
ya = - ω y [9]
y por tanto, la fuerza neta que actúa sobre ella según la segunda ley de Newton es,

10
y yF = m a
2
yF = - m ω y
yF = - k y [15]
en donde,
2k = m ω [16]
Por tanto, se concluye que una partícula oscila con MAS si y solo si la fuerza neta que actúa sobre ella
cumple que:
sea lineal con la elongación.
sea recuperadora (se oponga en todo instante a la elongación). Esto es, apunte en todo instante
hacia la posición de equilibrio de la partícula.
La fuerza es variable. En la posición de equilibrio es nula y va aumentando en magnitud cuando el oscilador
avanza hacia los extremos del movimiento hasta alcanzar su valor máximo en estos (2
yF = m ω A ). Por lo
tanto, las oscilaciones se dan por un compromiso entre la inercia y la fuerza restauradora, ya que aunque
en el instante que la partícula pasa por la posición de equilibrio no está sometida a una fuerza neta, aquí es
nula (en la dirección del movimiento), logra atravesar la posición de equilibrio; esto es consecuencia de la
inercia.
Aplicando las ecuaciones [5] y [13] se obtiene para el periodo y la frecuencia en Hz del MAS,
mP = 2π [17]
k
1 kf = [18]
2π m
La frecuencia, el período, la frecuencia angular y la constante del MAS, son constantes impuestas por la
naturaleza al sistema (son “huellas digitales”). A la frecuencia se le denomina frecuencia natural o
frecuencia propia del oscilador.

11
Oscilaciones del sistema masa-resorte
En el sistema masa-resorte la fuerza F que ejerce el resorte sobre la masa m cumple la ley de Hooke,
Figura 13,
F = - ky [19]
en donde la elongación y con que oscila la masa es igual a lo que se deforma el resorte. Con base en esto se
puede inferir que la masa oscilará con MAS cuya constate k es la constante de rigidez del resorte y por lo
tanto el periodo y la frecuencia de oscilación son,
mP = 2π [17]
k
1 kf = [18]
2π m
Figura 13
Oscilaciones del péndulo simple
Un péndulo simple consiste de un hilo inextensible del cual pende una masa puntual. Las oscilaciones de este
sistema se deben a la fuerza tangencial la cual es proporcionada por la componente mg senθ del peso,
Figura 14.

12
Figura 14
Es decir,
t-mgsenθ = ma
por lo tanto,
t-gsenθ = a
ta -g senθ
t
xa = -g
L
t
ga = - x
L
Para pequeñas oscilaciones se puede asumir que la trayectoria de la masa pendular fue X en lugar de S,
concluyendo con base en la ecuación [9’] que,
2 gω =
L
y por lo tanto se concluye que para pequeñas oscilaciones el movimiento pendular es armónico simple cuyo
periodo y frecuencias se obtiene aplicando [5 y [13],
LP = 2π [20]
g
1 gf = [21]
2π L

13
Oscilaciones del péndulo físico
Un péndulo físico consiste de un cuerpo rígido suspendido en un punto de apoyo y en posición de equilibrio
estable. Las oscilaciones de este sistema se deben a un torque recuperador debido a la fuerza de
gravedad (peso), Figura 15.
Figura 15
Aplicando la segunda ley de Newton de rotación se obtiene,
o-mg bsenθ = I α
en donde b es la distancia desde el punto de apoyo O hasta el centro de masa CM, m la masa del cuerpo y
Io es el momento de inercia del cuerpo rígido respecto a un eje que pasa por O.
La aceleración tangencial del centro de masa CM es,
Ta = α b
Combinando las dos últimas ecuaciones,
To
a-mg bsenθ = I
b
2
T
o
mg ba = - senθ
I
2
T
o
mg b xa = -
I b
T
o
mgb a = - x
I

14
Para pequeñas oscilaciones se puede asumir que la trayectoria de la masa pendular fue X en lugar de S,
concluyendo con base en la ecuación [9’] que,
2
o
mgbω =
I
y por lo tanto se concluye que para pequeñas oscilaciones el movimiento pendular es armónico simple cuyo
periodo y frecuencias se obtiene aplicando [5 y [13],
oIP = 2π [22]
mgb
o
1 mgbf = [23]
2π I
Experimento 1: Cronograma de las oscilaciones de un sistema masa-resorte
Este experimento tiene como objetivo ilustrar que el cronograma, es decir la representación de la
elongación vs tiempo, de las oscilaciones del sistema masa-resorte es una función sinusoidal del tiempo. Una
forma equivalente de hacer esto, es mostrar que la aceleración de las oscilaciones en función del tiempo
también es una función sinusoidal del tiempo (recordar que la elongación y la aceleración de una MAS están
desfasadas , es decir, están en oposición, tal como lo expresa la ecuación [9]). Este último será el método
a emplear en este experimento, en el cual, se empleará el acelerómetro del teléfono celular.
Objetivo general
Mostrar experimentalmente que las oscilaciones del sistema masa-resorte son armónicas, es decir, mostrar
que el sistema masa-resorte oscila con MAS.
Fundamento teórico
Marco de referencia y sistema de coordenadas.
Movimiento Armónico Simple (MAS).
Trabajo práctico
El montaje para la realización de la práctica se ilustra en la Figura 16. Se observa que el teléfono
celular hace las veces de la masa del sistema.
Activar el acelerómetro inercial de PhysicsSensor, Figura 17.
Hacer oscilar el teléfono celular en dirección de su eje Y: tratar de hacerlo lo mejor que se pueda.
Inmediatamente antes de hacerlo oscilar activar el modo gráfico del acelerómetro.
Dejarlo hacer unas cuatro o cinco oscilaciones completas.

15
Figura 16

16
Figura 17
Detener el celular y bajarlo del sistema. Observar la gráfica correspondiente a la aceleración en
dirección Y (ay). Se observa en la Figura 18 izquierda el comportamiento sinusoidal de la aceleración.
En la Figura 18 derecha se hizo manualmente un retoque de esta curva para observarla mejor.
Figura 18

17
Experimento 2: Calibración dinámica de un resorte
Objetivo general
Medir la constante de rigidez del resorte utilizando como modelo experimental la ecuación [17].
Fundamento teórico
Marco de referencia y sistema de coordenadas.
Movimiento Armónico Simple (MAS).
Ley de Hooke
Trabajo práctico
El montaje para la realización de la práctica se ilustra en la Figura 19. Se observa un “portapesas”
acoplado al resorte. Adicionalmente se acopla un “palito” que al atravesar la fotocompuerta permitirá
generar una señal en el sonoscopio de PhysicsSensor. La fotocompuerta está acoplada al teléfono
celular tal como se ha hecho en las prácticas anteriores.
Activar el sonoscopio de PhysicsSensor del celular en el MODO 1, Figura 20.
Para unas seis masas diferentes medir con el sonoscopio el periodo en cada caso mediante la
interpretación de la señal generada, Figura 21.
Con los datos recolectados construir una tabla de datos de P2 vs m. A partir de una linealización de la
ecuación [17], ecuación [24], y mediante el uso de la regresión lineal de PhysicsSensor obtener la
constante de rigidez k del resorte a partir de la gráfica de la recta P2 vs m.
22 4π
P = m [24]k

18
Figura 19

19
Figura 20
Figura 21

20
Experimento 3: Cronograma de las oscilaciones de un péndulo simple
Este experimento tiene como objetivo ilustrar que el cronograma, es decir la representación de la
elongación vs tiempo, de las oscilaciones del sistema péndulo simple es una función sinusoidal del tiempo.
Una forma equivalente de hacer esto, es mostrar que la aceleración de las oscilaciones en función del
tiempo también es una función sinusoidal del tiempo (recordar que la elongación y la aceleración de una
MAS están desfasadas , es decir, están en oposición, tal como lo expresa la ecuación [9]). Este último
será el método a emplear en este experimento, en el cual, se empleará el acelerómetro del teléfono
celular.
Objetivo general
Mostrar experimentalmente que el movimiento oscilatorio del péndulo simple para pequeñas oscilaciones es
un MAS.
Fundamento teórico
Marco de referencia y sistema de coordenadas.
Movimiento Armónico Simple (MAS).
Trabajo práctico
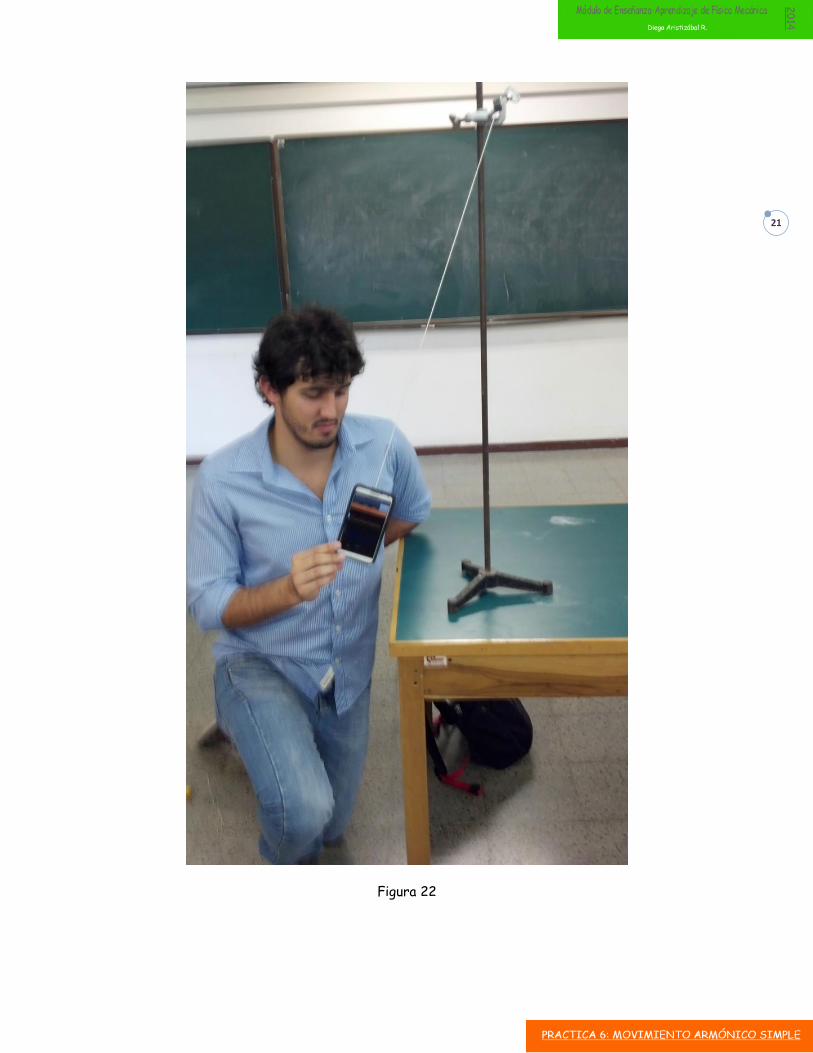
El montaje para la realización de la práctica se ilustra en la Figura 22. Se observa que el teléfono
celular hace las veces de la masa pendular.
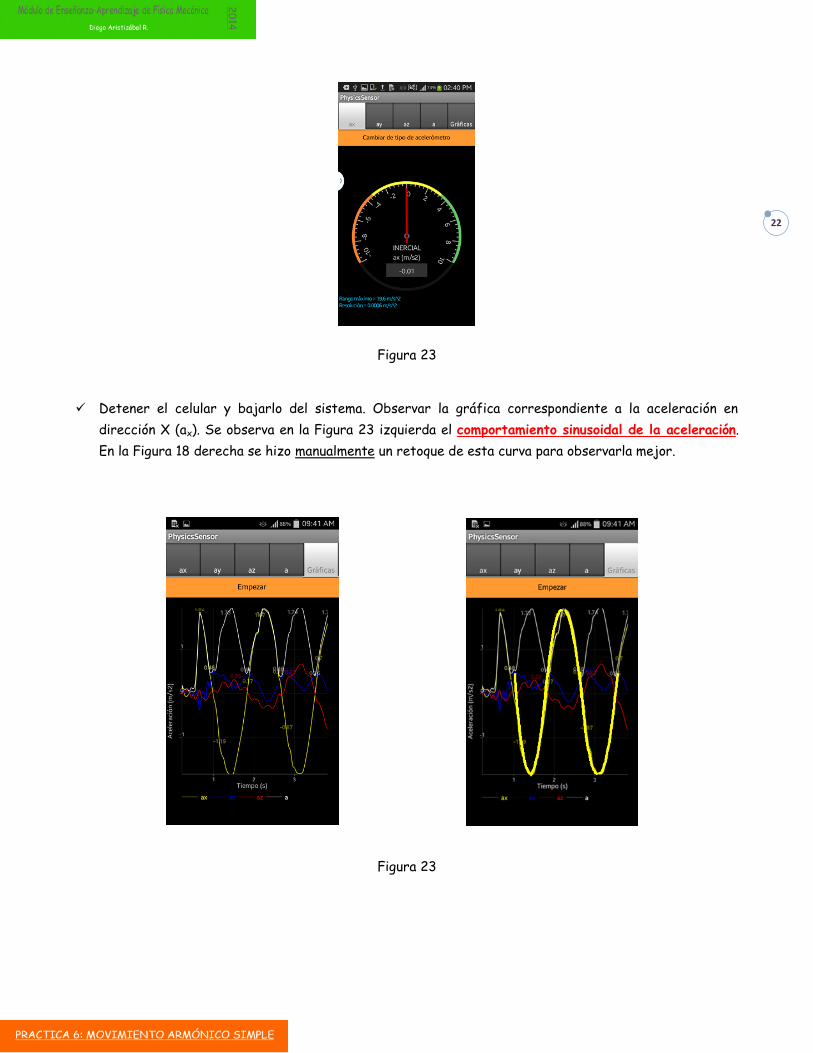
Activar el acelerómetro inercial de PhysicsSensor, Figura 23.
Hacer oscilar el teléfono celular en un plano ortogonal a su eje Z: tratar de hacerlo lo mejor que se
pueda (se aconseja no utilizar hilo sino nylon para disminuir el efecto torsional). Inmediatamente antes
de hacerlo oscilar activar el modo gráfico del acelerómetro.
Dejar que el péndulo oscile unas cuatro o cinco veces.
21
Figura 22
22
Figura 23
Detener el celular y bajarlo del sistema. Observar la gráfica correspondiente a la aceleración en
dirección X (ax). Se observa en la Figura 23 izquierda el comportamiento sinusoidal de la aceleración.
En la Figura 18 derecha se hizo manualmente un retoque de esta curva para observarla mejor.
Figura 23

23
Experimento 4: Medida de la aceleración de la gravedad usando un péndulo simple
Objetivo general
Medir la aceleración de gravedad utilizando como modelo experimental la ecuación [20].
Fundamento teórico
Marco de referencia y sistema de coordenadas.
Movimiento Armónico Simple (MAS).
Movimiento circular.
Trabajo práctico
El montaje para la realización de la práctica se ilustra en la Figura 24. La cuerda pendular debe
atravesar la fotocompuerta lo que permitirá generar una señal en el sonoscopio de PhysicsSensor. La
fotocompuerta está acoplada al teléfono celular tal como se ha hecho en las prácticas anteriores.
Activar el sonoscopio de PhysicsSensor del celular en el MODO 1, Figura 25.
Para unas siete longitudes diferentes (se recomienda empezar con 1,50 m e ir disminuyendo de a 10
cm) medir con el sonoscopio el periodo en cada caso mediante la interpretación de la señal generada,
Figura 26.
Con los datos recolectados construir una tabla de datos de P2 vs L. A partir de una linealización de la
ecuación [20], ecuación [25], y mediante el uso de la regresión lineal de PhysicsSensor obtener el valor
de la aceleración de la gravedad g a partir de la gráfica de la recta P2 vs L.
22 4π
P = L [25]g

24
Figura 24

25
Figura 25
Figura 26

26
Experimento 5: Cronograma de las oscilaciones de un péndulo físico
Este experimento tiene como objetivo ilustrar que el cronograma, es decir la representación de la
elongación vs tiempo, de las oscilaciones de un péndulo físico es una función sinusoidal del tiempo. Una
forma equivalente de hacer esto, es mostrar que la aceleración de las oscilaciones en función del tiempo
también es una función sinusoidal del tiempo (recordar que la elongación y la aceleración de una MAS están
desfasadas , es decir, están en oposición, tal como lo expresa la ecuación [9]). Este último será el método
a emplear en este experimento, en el cual, se empleará el acelerómetro del teléfono celular.
Objetivo general
Mostrar experimentalmente que el movimiento oscilatorio del péndulo físico para pequeñas oscilaciones es
un MAS.
Fundamento teórico
Marco de referencia y sistema de coordenadas.
Movimiento circular.
Movimiento Armónico Simple (MAS).
Rotación de un cuerpo rígido alrededor de eje fijo.
Momento de inercia.
Trabajo práctico
El montaje para la realización de la práctica se ilustra en la Figura 27. Se observa que el teléfono
celular se acopla al péndulo físico, o mejor, el celular hace parte del péndulo físico.
Activar el acelerómetro inercial de PhysicsSensor, Figura 28.
Hacer oscilar el péndulo físico en un plano ortogonal al eje Z del celular: tratar de hacerlo lo mejor que
se pueda. Inmediatamente antes de hacerlo oscilar activar el modo gráfico del acelerómetro.
Dejar que el péndulo oscile unas cuatro o cinco veces.

27
Figura 27

28
Figura 28
Detener el péndulo y bajar el celular del sistema. Observar la gráfica correspondiente a la aceleración
en dirección X (ax). Se observa en la Figura 29 izquierda el comportamiento sinusoidal de la
aceleración. En la Figura 29 derecha se hizo manualmente un retoque de esta curva para observarla
mejor.
Figura 29

29
Experimento 6: Medida de la aceleración de la gravedad usando un péndulo físico
Objetivo general
Medir la aceleración de gravedad y el momento de inercia de una regla utilizando como modelo
experimental la ecuación [22].
Fundamento teórico
Marco de referencia y sistema de coordenadas.
Movimiento circular.
Movimiento Armónico Simple (MAS).
Rotación de un cuerpo rígido alrededor de eje fijo.
Momento de inercia.
Trabajo práctico
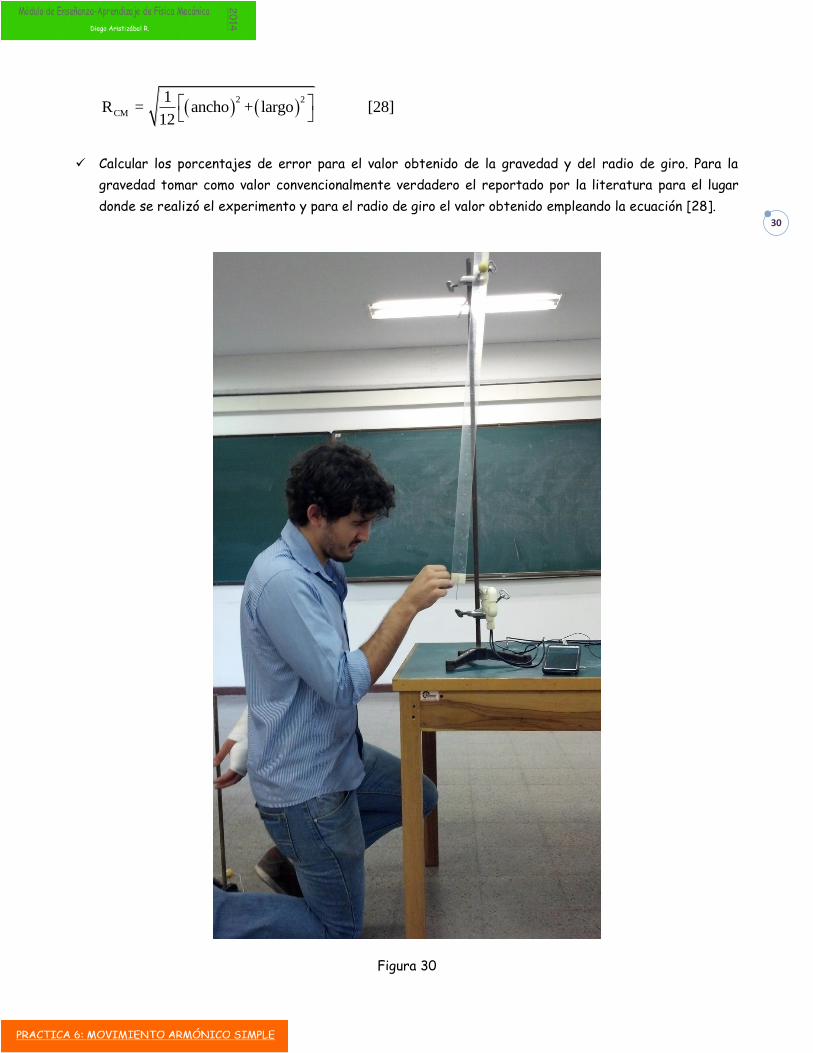
El montaje para la realización de la práctica se ilustra en la Figura 30. A regla pendular se le acopla un
“palito” el cual debe atravesar la fotocompuerta lo que permitirá generar una señal en el sonoscopio de
PhysicsSensor. La fotocompuerta está acoplada al teléfono celular tal como se ha hecho en las
prácticas anteriores.
Activar el sonoscopio de PhysicsSensor del celular en el MODO 1, Figura 31.
La regla pendular tiene agujeros cada 5 cm: estos agujeros permiten ir cambiando el punto de
suspensión de la regla. Para unas seis posiciones consecutivas tomadas a partir de uno de los extremos
medir con el sonoscopio el periodo en cada caso mediante la interpretación de la señal generada, Figura
32.
Aplicando el teorema de ejes paralelos para el momento de inercia, la ecuación [22] se puede escribir
en función del radio de giro respecto al centro de masa, CMR ,
que linealizada se transforma en,
2 2 2
CM2
gb = P b - R [27]
4π
Con los datos recolectados construir una tabla de datos de b2 vs P2b. mediante el uso de la regresión
lineal de PhysicsSensor obtener el valor de la aceleración de la gravedad g y el radio de giro de la regla
respecto al centro de masa RCM a partir de la gráfica de la recta b2 vs P2b.
Medir las dimensiones de la regla (largo y ancho) y calcular el radio de giro teórico empleando la
expresión [28],
2 2
CMR + bP = 2π [26]
gb
30
2 2
CM
1R = ancho + largo [28]
12
Calcular los porcentajes de error para el valor obtenido de la gravedad y del radio de giro. Para la
gravedad tomar como valor convencionalmente verdadero el reportado por la literatura para el lugar
donde se realizó el experimento y para el radio de giro el valor obtenido empleando la ecuación [28].
Figura 30

31
Figura 31
Figura 32

32
Experimento 7: Superposición de dos MAS en direcciones ortogonales
Sean dos M.A.S que producen por separado elongaciones x y y de la partícula (direcciones de vibración
ortogonales),
x x 0xx = A sen ω t + φ
y y 0yy = A sen ω t + φ
en donde xA ,
yA corresponden a las amplitudes de las oscilaciones, xω ,
yω corresponden a las
frecuencias angulares y 0xφ , 0yφ
corresponden a sus respectivas fases iniciales. Al superponer estos dos
MAS el movimiento resultante serán las denominadas Figuras de Lissajous cuando la relación entre las
frecuencias corresponden a relaciones de números enteros. En la siguiente simulación se ilustra la
formación de estas figuras.
Simulación:
Analizar la simulación de SimulPhysics correspondiente al Superposición de MAS > Polarización y
Lissajous. Para acceder a ella hacer clic con el mouse en el ítem señalado en la Figura 33. Se despliega la
simulación de la Figura 34. En ésta hacer las variaciones permitidas y observar detenidamente los
resultados.
Figura 33
Figura 34
33
La relación entre las frecuencias se puede obtener a partir de la relación entre el número de picos
horizontales y el número de picos verticales, ecuación [29].
x
y
f número de picos en dirección vertical= [29]
f número de picos en dirección horizontal
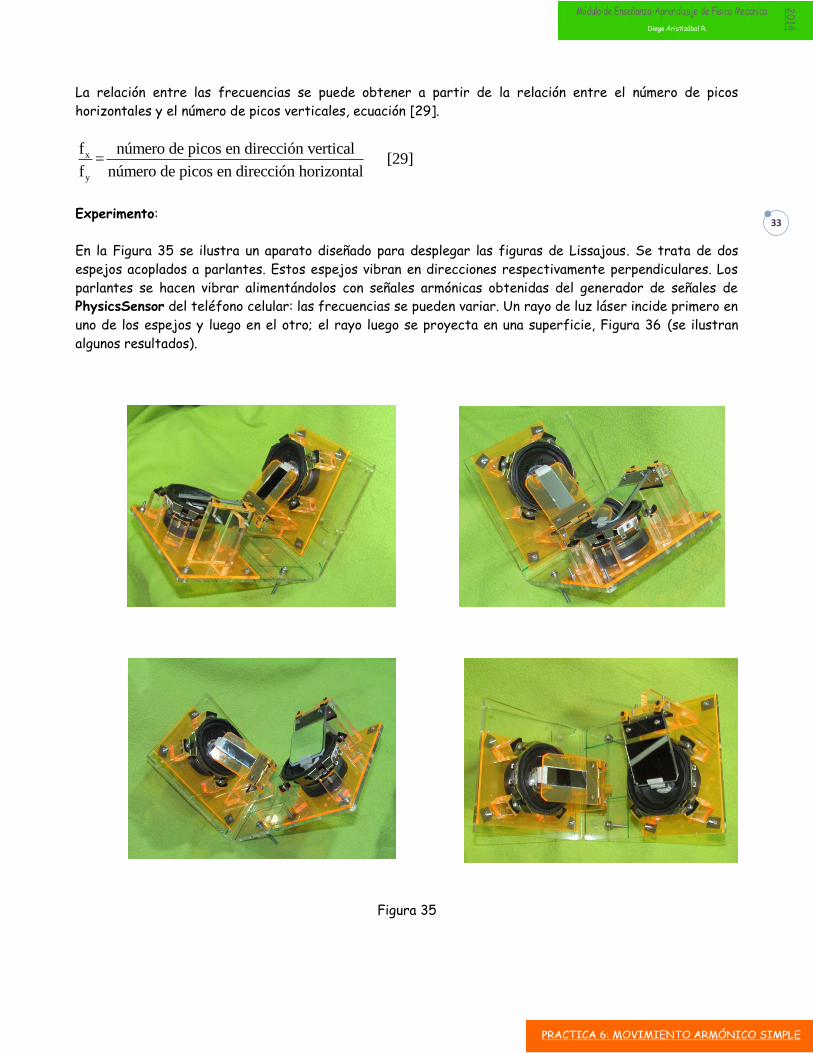
Experimento:
En la Figura 35 se ilustra un aparato diseñado para desplegar las figuras de Lissajous. Se trata de dos
espejos acoplados a parlantes. Estos espejos vibran en direcciones respectivamente perpendiculares. Los
parlantes se hacen vibrar alimentándolos con señales armónicas obtenidas del generador de señales de
PhysicsSensor del teléfono celular: las frecuencias se pueden variar. Un rayo de luz láser incide primero en
uno de los espejos y luego en el otro; el rayo luego se proyecta en una superficie, Figura 36 (se ilustran
algunos resultados).
Figura 35

34
Figura 36
FIN.