unidad 1 & 2_ fotogrametria
TRANSCRIPT

DEFINICIÓN DE FOTOGRAMETRÍA
Fotogrametría es la ciencia que se utiliza para obtener mediciones precisas por medio defotografías.
También es definida como el arte, la ciencia y la tecnología orientada a obtener informaciónrelevante de diversos objetos físicos de la corteza terrestre y de su medio ambiente, a través deprocesos de medición interpretación de imágenes fotográficas, y de patrones de energíaelectromagnética radiante.
Figura 1.2 Vuelo Fotogramétrico
Esta definición aunque no incluye en el sentido estricto de la palabra la interpretación de loselementos fotografiados, puede ser ampliada a la fotointerpretación, pues su finalidad es ellevantamiento de mapas, ya sean topográficos, por fotogrametría o temáticos porfotointerpretación. Además el proceso fotogramétrico incluye un cierto grado de análisis yclasificación de los objetos fotografiados. De igual forma, la fotointerpretación requiere en muchoscasos de mediciones de relativa precisión. Podría decirse en síntesis que la fotogrametría utilizalas fotografías con fines cuantitativos, en tanto que la fotointerpretación lo hace con finescualitativos. (Herrera, 1974).
La palabra fotogrametría empezó a utilizarse corrientemente, desde la fundación de la SociedadAmericana de Fotogrametría en el año de 1934. La palabra fotogrametría se deriva de tres raícesgriegas.

Foto - que significa luz
Grama - que significa dibujar
y Metrón que significa medir.
De este modo las raíces que conforman esta palabra significan “Mediciones gráficas por medio dela luz".

ESCALA DE FOTOGRAFÍAS
Cuando se emplean fotografías aéreas es de gran importancia el uso de las escalas, ya que permiten relacionar distancias en los documentos impresos. Por ejemplo, cuando se dice que una fotografía tiene una escala de 1:50 000, significa que cada unidad representa 50 000 veces la superficie del terreno.
Figura 1.12 Escala 1:50000Fuente: http://biblioweb.dgsca.unam.mx
Los tamaños de las imágenes en fotos aéreas verticales dependen de la altura de vuelo del avión sobre el terreno y la distancia focal de la lente de la cámara fotográfica.
Figura 1.13 Definición c y zFuente: http://fcf.unse.edu.ar/pdf/lpr
Es importante recordar que la distancia focal y la altura sobre el terreno, deben expresarse en las mismas unidades. Por ejemplo, si la distancia focal de la cámara es 300 mm. y H es 3000 m., la escala será 1/10.000. Si el terreno representado es perfectamente plano y la foto fue obtenida en un itinerario en línea recta y perfectamente horizontal, todos los objetos representados son 10.000 veces mayores que sus imágenes. Sin embargo, el terreno rara vez es totalmente plano y la escala variará a lo largo del formato de la fotografía al variar continuamente la altura de vuelo sobre al terreno. Así, la altura de vuelo sobre un valle será mayor que sobre una montaña. Por lo tanto, se debe tener en cuenta que en una meseta o área montañosa tendrá una escala superior a la de un valle o depresión. Esta es una de las principales diferencias que existe entre las fotografías y los mapas. También se puede determinar la escala de una fotografía por comparación con un mapa. Consiste en la medición de la distancia entre dos puntos característicos que puedan identificarse tanto en el mapa como en la fotografía de la que se quiere saber la escala. Las técnicas de comparación con mapas evidentemente sólo pueden usarse cuando tanto el mapa como la fotografía que cubren la misma área sean fiables y muestren algún rasgo distintivo cuya posición esté localizada exactamente. Normalmente se observan las posiciones de cruces de carreteras, puentes de ferrocarril, diques, etc. (Ing. Ftal. Fabian Reuter, sf, UNSE, http://fcf.unse.edu.ar/pdf/lpr)

Cálculo de Escala de la Foto
MÉTODO A: (a partir de un mapa)
a. Establecer dos puntos claramente definidos (viviendas, cruce de carreteras, etc.) en la fotografía y en el mapa a usar. La distancia entre los puntos debe ser de por lo menos 10 cm., en lo posible las cotas de los puntos deben ser similares. Para reducir el error es aconsejable que los puntos se ubiquen sobre las diagonales que pasan sobre el punto principal.
b. Determinar la distancia en la fotografía (df), y en el mapa (dm) y calcular la escala de la foto, con la siguiente proporción:
Em = Escala Mapa
Ef = Escala Foto
dm = Distancia Mapa
df = Distancia Foto
Se debe repetir este procedimiento para otra distancia elegida en la fotografía aérea. Posteriormente se promedian las distancias encontradas y de esta forma se encuentra la escala promedio en la fotografía.
MÉTODO B: (a partir de los datos de la cámara)
a. Calcular la altura promedio aproximada del terreno (hm) con la ayuda de las elevaciones indicadas en el mapa topográfico.
b. Establecer la distancia principal (c) de la cámara y la altura del vuelo (Zo o Zin) indicadas en la fotografía aérea.
Zo = Altura de vuelo sobre el nivel del mar.
Zm = Altura de vuelo sobre el terreno fotografiado.
hm = Altura promedio del terreno fotografiado.
Zm = Zo – hm
c. Calcular la escala de la foto Ef con la fórmula.
c = Distancia principal de la cámara

MÉTODO C: (a partir de las distancias en el terreno)
a. Se escoge en la fotografía dos pares de puntos (A-B y C-D) que cumplan con los siguientes requisitos:
Que sean fácilmente identificables en el terreno, con el objeto de poder medir sus distancias recurriendo a un equipo adecuado. (Si las distancias AB y CD en el terreno son previamente conocidas no es necesaria esta condición).
En lo posible cada par de puntos debe estar situado sobre cada una de las diagonales de la fotografía, a lado y lado del punto principal y a una distancia máxima.
Si no corrige el desplazamiento debido al relieve, es aconsejable que los puntos escogidos se encuentren sobre el nivel medio del terreno.
b. Encierre dentro de un círculo de 1 cm. de diámetro aproximadamente los puntos seleccionados anotando su nomenclatura.
c. Mida sobre la fotografía la distancia “ab” entre los puntos "A” y "B". Igualmente mida la distancia “cd” entre los puntos "C" y "D".
d. Mida en el terreno las distancias AB y CD.
e. Calcule la escala correspondiente a cada una de las distancias AB y CD.
= escala correspondiente a la línea AB
= escala correspondiente a la línea CD
ab = distancia entre los puntos A y B medida en la fotografía
cd = distancia entre los puntos C y D medida en la fotografía
AB = distancia entre los puntos A y B medida en el terreno
CD = distancia entre los puntos C y D medida en el terreno
f. Si la diferencia entre los módulos escalares calculados, es inferior al 10%, adopte el promedio de dichos valores como módulo escalar medio, obteniendo así, la escala media de la fotografía.

Si la diferencia es superior al 10%, debe revisar todas las operaciones realizadas en busca de un posible error (Ing. Ftal. Fabian Reuter, sf, UNSE, http://fcf.unse.edu.ar/pdf/lpr).
MÉTODO SEMIGRÁFICO PARA MEDICIÓN DE PENDIENTES –STELLINGWERF
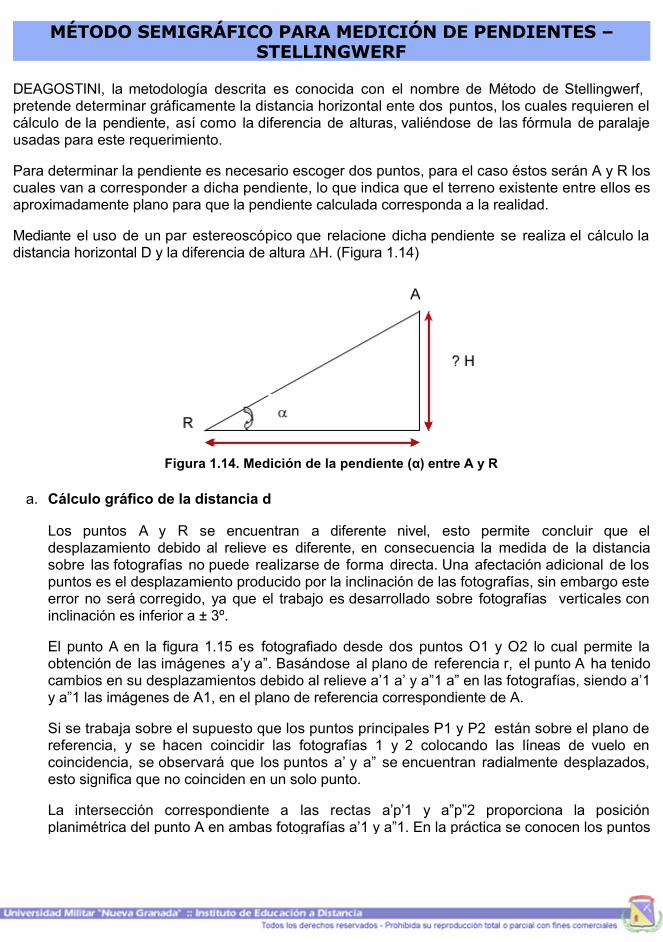
DEAGOSTINI, la metodología descrita es conocida con el nombre de Método de Stellingwerf, pretende determinar gráficamente la distancia horizontal ente dos puntos, los cuales requieren elcálculo de la pendiente, así como la diferencia de alturas, valiéndose de las fórmula de paralajeusadas para este requerimiento.
Para determinar la pendiente es necesario escoger dos puntos, para el caso éstos serán A y R loscuales van a corresponder a dicha pendiente, lo que indica que el terreno existente entre ellos esaproximadamente plano para que la pendiente calculada corresponda a la realidad.
Mediante el uso de un par estereoscópico que relacione dicha pendiente se realiza el cálculo ladistancia horizontal D y la diferencia de altura ∆H. (Figura 1.14)
Figura 1.14. Medición de la pendiente (α) entre A y R
Cálculo gráfico de la distancia d
Los puntos A y R se encuentran a diferente nivel, esto permite concluir que eldesplazamiento debido al relieve es diferente, en consecuencia la medida de la distanciasobre las fotografías no puede realizarse de forma directa. Una afectación adicional de lospuntos es el desplazamiento producido por la inclinación de las fotografías, sin embargo esteerror no será corregido, ya que el trabajo es desarrollado sobre fotografías verticales coninclinación es inferior a ± 3º.
El punto A en la figura 1.15 es fotografiado desde dos puntos O1 y O2 lo cual permite laobtención de las imágenes a’y a”. Basándose al plano de referencia r, el punto A ha tenidocambios en su desplazamientos debido al relieve a’1 a’ y a”1 a” en las fotografías, siendo a’1y a”1 las imágenes de A1, en el plano de referencia correspondiente de A.
Si se trabaja sobre el supuesto que los puntos principales P1 y P2 están sobre el plano dereferencia, y se hacen coincidir las fotografías 1 y 2 colocando las líneas de vuelo encoincidencia, se observará que los puntos a’ y a” se encuentran radialmente desplazados,esto significa que no coinciden en un solo punto.
La intersección correspondiente a las rectas a’p’1 y a”p”2 proporciona la posiciónplanimétrica del punto A en ambas fotografías a’1 y a”1. En la práctica se conocen los puntos
a.

principales y las imágenes a’ y a” del punto A. Basta con trazar las rectas indicadasanteriormente para hallar la posición planimétrica correcta del punto.
De lo anterior, para hallar la distancia entre dos puntos A y R, y si se desea calcular lapendiente, podemos usar los siguientes pasos:
Se marcan los puntos principales de cada fotografía y se transfieren a las fotosadyacentes.
Se marcan los puntos A (a’ y a”) y R (r’ y r”) en cada fotografía.
Desde el punto p’1 se trazan rectas radiales que pasen por a’ y r’.
Por r’ se traza una recta perpendicular a la línea de vuelo p’1 p’2.
Desde el punto principal p”2 de la foto derecha se trazan radiales a los puntos a” y r” yse marca la línea de vuelo.
Sobre un trozo de papel transparente se calcan las cuatro líneas dibujadas sobre la fotoizquierda.
Se coloca el papel transparente sobre la foto derecha de manera que las rectas quedefinen las líneas de vuelo coincidan y además que el punto r” se encuentre sobre larecta que pasa por r’ y es perpendicular a la línea de vuelo p’1 p’2.

Figura 1.15 Principio para la corrección del desplazamientodebido al relieve
Posteriormente se trazan sobre el papel transparente las rectas dibujadas en la foto derecha.La intersección de las rectas p’1a’ y p”2a” proporciona la posición planimétrica correcta delpunto A, reducida al plano de referencia que pasa por el punto R. El mismo desarrollo aplicapara la intersección de las rectas p’1r’ y p”2r” define el punto R.
AR es la distancia medida sobre el papel transparente es igual a la distancia entre los puntosA y R a la escala del plano que pasa por R. Si se requiere reducir esta distancia a unidadesde terreno se debe multiplicar por el módulo escalar Er que se relaciona con la escala 1/Erdel plano que pasa por R.
b.

Cálculo de la distancia ∆H:
La diferencia de altura entre los puntos A y R se calcula mediante la fórmula de paralaje,requiriendo el conocimiento de los valores de Zr, Pr y ∆Par de esta forma se encuentra ladiferencia de altura del terreno en metros.
b.
Cálculo de la pendiente
Con la determinación de la distancia d entre los puntos A y R a la escala del plano que pasapor el punto R y la diferencia de altura ∆Har entre dichos puntos, a escala del terreno enmetros. Los datos anteriores son elementos para el dibujo de la pendiente, multiplicando odividiendo los valores anteriores por un factor de escala, para la obtención del dibujodeseado.
c.
El cálculo de la pendiente puede hacerse de forma directa porque:
Pendiente AR = arctg (3.1)

ESTIMACIÓN DE PENDIENTES
DEAGOSTINI, Op. cit., p. 169 -172. Por medio de comparación de figuras tridimensionales se realiza la estimación de la pendiente, observándola en el terreno bajo un estereoscopio de espejos. Esta estimación de pendientes por comparación está afectada por la exageración estereoscópica que deforma las pendientes, debiéndose corregirlas en función de la exageración vertical.
Exageración Estereoscópica
El terreno real fotografiado es diferente al modelo tridimensional observado a través de un estereoscopio para el análisis de un par de fotografías. El relieve aparece deformado como consecuencia de la diferencia entre la escala planimétrica del modelo observado.
La exageración vertical o estereoscópica (Ev) es la relación existente entre la escala vertical y la escala planimétrica a las que se establece el modelo. Este valor es importante para la estimación de pendientes o buzamientos geológicos y para el estudio del espesor de capas geológicas ya que permite establecer la relación existente de la pendiente observada en el modelo estereoscópico (p) y el valor real de la pendiente en el terreno (q).
Figura 1.18 Comparación entre pendiente real (q) y pendiente exagerada (p)
Los factores que afectan la exageración estereoscópica son de dos orígenes:
Factores atribuibles a la fotografía
Base en el aire (B)
Distancia focal (f)
Altura de vuelo (Z)

Factores atribuibles a la visión estereoscópica
Distancia de observación de la fotografía (d)
Separación entre las fotografías (s)
Base interpupilar (E)
Distancia de observación del modelo (D)
Distancia de observación normal igual a 250 mm
Diferentes autores han tratado de calcular numéricamente la exageración vertical (Ev) obteniendo algunas fórmulas como son:
Jackson y Hurault (3.12)
Método Mekel
Mekel es un estimador de pendientes conformado por un pequeño plano (P) que puede girar alrededor de un eje horizontal (E). Éste se coloca sobre una de las fotografías del par que se observa estereoscópicamente y sobre la pendiente tridimensional se coloca dicho plano paralelo a la pendiente. Sobre el circulo (1) del nomograma del estimador de pendientes (Figura 1.20) puede leerse el valor del ángulo (45º), pero este ángulo correspondería a una pendiente del terreno con exageración estereoscópica igual a uno. Se requiere disminuir el valor en base a la Ev determinada valiéndose de una de las expresiones anteriores para obtener la pendiente real del terreno.
Figura 1.20 Estimador de pendientes Mekel
EL MAPA
El mapa es una representación gráfica convencional, generalmente a escala y sobre un plano, deuna superficie terrestre u otro cuerpo celeste.
Tipos de Mapa
Se tiene en cuenta una clasificación según su contenido, escala y finalidad:
Según su contenido. Son aquellos que representan información básica sobre relieve,sistema fluvial, principales ciudades y vías de comunicación.
Según la escala. Los mapas pueden ser locales, regionales, nacionales, continentales omundiales.
Según su finalidad. Se clasifican en técnicos y didácticos, siendo los más comunes:
Carta
Mapa Topográfico
Mapa Base
Mapa Temático
Fotomapa
Ortofotomapa
Escala de los Mapas
Los mapas son una representación convencional de la superficie terrestre. Esta representación eshecha con una relación proporcional con respecto al objeto representado. Dicha relación es lo quese denomina escala y se calcula comparando una distancia medida sobre el mapa con sucorrespondiente en el terreno.
(1.11)
Donde: E = denominador de la escala
Cuando se identifican en el terreno objetos que aparecen representados en el mapa, se debeconsiderar dos factores de error muy importantes que son:
ei = Error medio cuadrático de identificación de un objeto en el terreno.
el = Error medio cuadrático en el levantamiento fotogramétrico del objeto.

Conociendo los valores de ei y el se calcula la escala correcta del mapa utilizando el valor:
ede = Error cometido al dibujar y dar escala a la distancia entre dos puntos =0.014 cm
(1.12)
con ei y el expresados en cm.

FOTOINTERPRETACIÓN: GEOLOGÍA Y GEOMORFOLOGÍA
La fotografía aérea es un caso particular de la teledetección en la que se utilizan plataformas a baja altura (aviones en lugar de satélites) con lo que la escala es mayor. Tradicionalmente se caracterizaba también por la utilización del papel como soporte y de las longitudes de onda del visible o infrarrojo. Sin embargo, en los últimos años el desarrollo de las cámaras digitales ha permitido la aparición de fotografía aérea digital y el uso de diversas bandas del espectro.
Este tema se va a centrar en la utilización de fotografía aérea vertical tradicional en papel ya que las técnicas de manejo de fotografía digital son muy similares a las de imágenes de satélite, y a la conveniencia de aprender su manejo en estudios de evolución del paisaje.
Técnica
A pesar de que podamos considerar a la fotointerpretación como un caso particular de la teledetección, existe una diferencia fundamental entre ambas técnicas. En teledetección se utiliza un dispositivo de barrido, mientras que en fotointerpretación se utiliza una cámara fotográfica con tecnología óptica. El resultado son distintos tipos de proyecciones. Las cámaras utilizadas en fotografía aérea son cámaras de alta resolución y gran tamaño ya que deben impresionar un cliché de unos 23 por 23 cm Uno de los parámetros fundamentales a la hora de analizar una fotografía aérea es la distancia focal (f) que se expresa en milímetros. A partir de esta y la altura de vuelo (H) puede calcularse la escala (E) de la fotografía resultante:
E=H/f
Por ejemplo si la altura de vuelo son 5000 m y la distancia focal 125 mm la escala de la fotografía resultante será 1:40000.
Las películas utilizadas pueden ser en blanco y negro o en color. Una imagen en blanco y negro registra la reflectividad del objeto fotografiado en una determinada región del espectro electromagnético. Esta puede ser la banda del visible (pancromáticas) o incluir el infrarrojo. Las imágenes en color obtienen la reflectividad en diversas regiones del espectro y, posteriormente las combinan en una sola imagen asignando a cada banda un color, pueden obtenerse también solo para el visible o incluir infrarrojo. Estas posibilidades son las más utilizadas en fotografía aérea, sin embargo existen muchas otras posibilidades.
La selección de la banda del espectro que se desea fotografiar se hace colocando un filtro delante del objetivo para que sólo deje pasar aquella parte del espectro que nos interesa. Los filtros también pueden utilizarse para resaltar unos colores sobre otros o para atenuar los efectos de la atmósfera en fotografía aérea de gran altura.
Los Fotogramas Aéreos
Una fotografía aérea se toma con una proyección cónica con deformaciones angulares, si corregimos estas deformaciones obtenemos un ortofotomapa ya que el proceso de corrección consiste en el paso a una proyección ortogonal. Las deformaciones son máximas hacia los bordes de la fotografía.
En un fotograma aéreo además de la fotografía propiamente dicha aparecen una serie de elementos que facilitan la interpretación y la corrección.
En primer lugar aparecen cuatro marcas en las esquinas de la foto llamadas marcas fiduciales, si trazamos dos líneas diagonales pasando cada una por dos de estas marcas, éstas se cruzarán en el centro de la foto que debe coincidir con el nadir (punto de la superficie terrestre perpendicular al plano focal). Esto sólo es así si el avión volaba sin inclinación, en este último caso el punto central de la foto se desvía respecto al nadir.
El reloj nos informa de la hora y el altímetro de la altura a la que se tomó la foto. Suele aparecer además información acerca del organismo que ha obtenido la foto, fecha, escala, posición y diversa información administrativa.
Puesto que la altura focal es constante, y deben suministrárnosla junto a la fotografía aérea, podemos recalcular la escala dividiendo la altura de vuelo (que puede variar de un fotograma a otro) menos la altura del terreno entre la distancia focal.
E=(H-h)/f
Evidentemente la escala no va a ser constante, no sólo entre fotografías de un vuelo sino tampoco dentro de la misma fotografía, sino que va a depender de la altitud de cada punto. Si en el área fotografiada existen diferencias de altitud importantes, en necesario tener en cuenta su efecto sobre la escala.
Series de Fotogramas
Normalmente los fotogramas que se manejan en cualquier trabajo relacionado con la gestión del territorio no se toman aislados sino que son series que cubren un espacio bastante amplio. Una serie de fotogramas es el conjunto de fotogramas que cubren dicho espacio y que normalmente tienen un solapamiento longitudinal de un 50 ó 60%, que permite la visión estereoscópica y un solapamiento latitudinal de 20-30% para asegurar que no quede espacio por cubrir.
A la hora de planificar un vuelo se tiene en cuenta que si el sol está excesivamente alto se pueden producir reflejos, mientras que si está muy bajo pueden producirse sombras excesivas; sin embargo algunas aplicaciones pueden beneficiarse de la presencia de sombras.
También hay que tener en cuenta el propósito del vuelo. Si se quiere cartografiar formaciones vegetales es preferible evitar sombras y buscar una época en la que las diferentes formaciones puedan distinguirse mejor. Por el contrario aplicaciones de tipo geológico-geomorfológico se benefician de la presencia de sombras y de la ausencia de hojas en los árboles
La época más adecuada para realizar un vuelo es primavera y otoño y la mejor hora el mediodía. Con ello se minimizan las sombras y los efectos de reflexión del sol en superficies de agua.
Paralaje y Visión Estereoscópica
Cada uno de nuestros ojos actúa como una cámara que capta una imagen. Cada uno de los ojos adquiere una imagen ligeramente diferente y desplazada debido a los aproximadamente 64 mm de separación entre ellos. El resultado es que los objetos aparecen ligeramente desplazados sobre el fondo, este desplazamiento es transformado por el cerebro en una representación tridimensional ya que el desplazamiento será tanto mayor cuanto más alejado este el objeto del fondo.
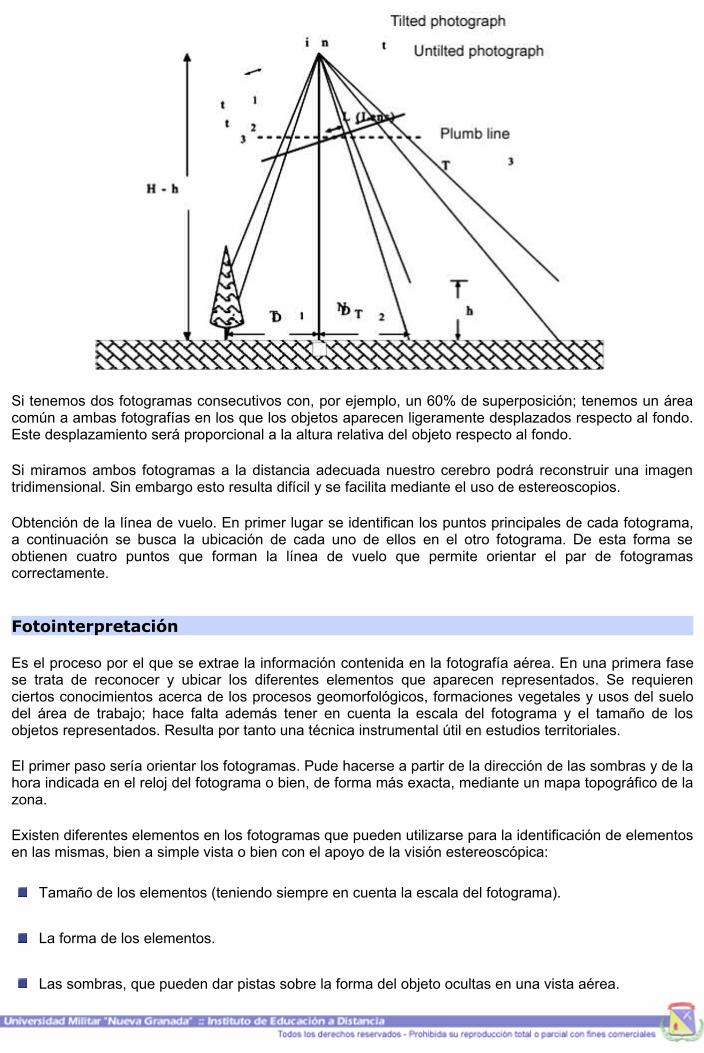
Si tenemos dos fotogramas consecutivos con, por ejemplo, un 60% de superposición; tenemos un área común a ambas fotografías en los que los objetos aparecen ligeramente desplazados respecto al fondo. Este desplazamiento será proporcional a la altura relativa del objeto respecto al fondo.
Si miramos ambos fotogramas a la distancia adecuada nuestro cerebro podrá reconstruir una imagen tridimensional. Sin embargo esto resulta difícil y se facilita mediante el uso de estereoscopios.
Obtención de la línea de vuelo. En primer lugar se identifican los puntos principales de cada fotograma, a continuación se busca la ubicación de cada uno de ellos en el otro fotograma. De esta forma se obtienen cuatro puntos que forman la línea de vuelo que permite orientar el par de fotogramas correctamente.
Fotointerpretación
Es el proceso por el que se extrae la información contenida en la fotografía aérea. En una primera fase se trata de reconocer y ubicar los diferentes elementos que aparecen representados. Se requieren ciertos conocimientos acerca de los procesos geomorfológicos, formaciones vegetales y usos del suelo del área de trabajo; hace falta además tener en cuenta la escala del fotograma y el tamaño de los objetos representados. Resulta por tanto una técnica instrumental útil en estudios territoriales.
El primer paso sería orientar los fotogramas. Pude hacerse a partir de la dirección de las sombras y de la hora indicada en el reloj del fotograma o bien, de forma más exacta, mediante un mapa topográfico de la zona.
Existen diferentes elementos en los fotogramas que pueden utilizarse para la identificación de elementos en las mismas, bien a simple vista o bien con el apoyo de la visión estereoscópica:
Tamaño de los elementos (teniendo siempre en cuenta la escala del fotograma).
La forma de los elementos.
Las sombras, que pueden dar pistas sobre la forma del objeto ocultas en una vista aérea.

El tono que indica la reflectividad en la región del visible.
Textura, distribución de colores en una fotografía
Distribución de los elementos
El método de trabajo tradicional ha sido el dibujo de los diferentes objetos que aparecen en la fotografía en acetato transparente al mismo que tiempo que se observa el par de fotogramas con estereoscopio. Sin embargo puede resultar complicado y resulta preferible dibujar sobre el fotograma escaneado al mismo tiempo que se observan los fotogramas con el estereoscopio. Además es posible corregir y georreferenciar de forma semiautomática un fotograma escaneado, de este modo puede integrarse en un Sistema de Información Geográfica. Existen también estereoscopios adaptados para trabajar en la pantalla del ordenador.
Geología y Geomorfología
Topografía
La acentuación de las diferencias topográficas que proporciona la fotografía aérea nos permite obtener una visión global del paisaje. A partir de la topografía puede llegarse a conclusiones de interés acerca Sin embargo más que en una visión global de la topografía puede ser interesante centrarse en las discontinuidades de detalle de la altitud que van a revelar la existencia de geoformas debidas a los procesos de modelado, erosión diferencial, escarpes, además de las grandes líneas estructurales.
Litología
Diversos son los elementos que pueden ayudar a identificar litologías.
Tonos característicos.
Formas de modelado a que dan lugar.
Tipología de la red de drenaje a que dan lugar.
Comportamiento de la vegetación en relación a los diferentes tipos de roca.
Las rocas sedimentarias presentan planos de estratificación y un bandeado característico fácilmente identificable en la fotografía aunque, en algunos casos, pueden aparecer ocultos por la vegetación. Sin embargo a veces las discordancias litológicas pueden aparecer resaltadas debido a las preferencias de la vegetación por un tipo de roca u otro.
Las arcillas se caracterizan por un color oscuro, más claro en el caso de las arcillas arenosas. La red de drenaje aparece muy desarrollada y de alta densidad. Resulta difícil identificar fracturas o fallas debido a que la plasticidad de la arcilla las enmascara.
Las margas son arcillas que contienen entre un 35 un 65 % de CO3Ca por lo que su color es algo más claro y su morfología es semejante a la de las arcillas. Sin embargo dependiendo de la composición pueden dar lugar a morfologías y colores muy diferentes.
Las arenas dan lugar a relieves bajos, formando llanuras irregulares drenadas por redes dendríticas cuya densidad dependerá del grado de cohesión y humedad de las arenas. Los interfluvios tienen

formas suaves al contrario que en el caso de las arcillas. Si aparecen mezclas de arenas y arcillas las características de drenaje se combinan.
Los conglomerados presentan características muy cambiantes en función de los materiales de los que están formados dando lugar a una gran variedad de formas y relieves. En general forman plataformas extensas, horizontales o algo inclinadas extensas, que protegen de la erosión otros materiales más débiles.
Por su falta de elasticidad suelen fracturarse en caso de sufrir esfuerzos tectónicos. Estas fracturas pueden reconocerse, no sólo por la presencia de escarpes, sino también a que tanto la vegetación como la red de drenaje se concentran en ellas.
Las calizas, por ser rocas sedimentarias, pueden aparecer mezcladas con proporciones diversas de otros materiales como arena, arcilla o marga. Las calizas más puras suelen ser más resistentes dando, por tanto, lugar a relieves más fuertes.
Los estratos calizos son continuos y con bordes suaves y redondeados y forman resaltes sobre otros estratos menos resistentes. En el caso de que hayan experimentado pliegues complejos su identificación puede resultar compleja.
En el caso de estratos de calizas puras, horizontales o subhorizontales y afectados por procesos de facturación, éstos se ven sometidos a procesos de clasificación que se muestran en la fotografía aérea como alineaciones de dolinas y la aparición de polies. Por otra parte la infiltración del agua supone la ausencia de red de drenaje y la escasez de la vegetación.
Es habitual la presencia de capas intercaladas de estratos calizos intercalados con margas o margocalizas perfectamente identificables en el caso de que los pliegues no sean muy complejos.
Estructura
Con el uso de la fotografía aérea resulta sencillo identificar fallas y fracturas de gran tamaño aunque no las pequeñas. Tampoco suele poder distinguirse entre falla y fractura. En general son más fáciles de identificar en ambientes áridos y semiáridos.
Las fallas en las que la componente vertical del desplazamiento es más importante que la horizontal modifican la topografía con lo que su identificación en el campo es más sencilla. La inclinación del plano de falla solo puede apreciarse cuando origina escarpes y toda la morfología de facetas, barrancos y conos de deyección asociada.
Todas las modificaciones que pueden sufrir estos tipos de estructuras a posteriori debido a los procesos erosivos (retroceso y pérdida de altura del escarpe) son difícilmente observables en fotografía aérea.
Las fracturas suelen actuar como zonas de acumulación de agua. El resultado es un incremento de la acción de los procesos erosivos que se pone de manifiesto en la topografía y es fácilmente detectable en fotointerpretación.
En cuanto a los plegamientos, la erosión diferencial acentúa la diferenciación entre estratos y suele provocar inversiones del relieve (anticlinales desventrados y sinclinales colgados). En los sinclinales la charnela sinclinal suele coincidir con una zona deprimida apareciendo sierras alargadas cuya vertiente más suave mira hacia el eje del sinclinal
La topografía de domos y cubetas es similar a la de anticlinales y sinclinales (respectivamente) pero con planta anular.
Se puede reconocer la presencia de un estrato y su dirección de buzamiento ya que el talud de menor pendiente mira hacia éste. La parte convexa del talud mira en dirección contraria al buzamiento.
Drenaje
La exageración del relieve en una fotografía aérea permite apreciar detalles de la red de drenaje que no resultan fáciles de detectar en un mapa a la misma escala. La precisión obtenida no puede igualarse con visitas de campo que además no permiten una visión de conjunto.
Ayudan a la identificación de litologías y estructuras ya que la red de drenaje está sujeta a numerosos controles por parte de litología, topografía y estructura.
La densidad de la red de drenaje disminuye con la dureza de la roca. En ausencia de control estructural la red tiende a ser dendrítica En el caso de control por plegamientos aparecen redes paralelas o subparalelas, radiales (centrífugas o centrípetas), anulares (centrífugas o centrípetas). Los cauces son de tipo anastomosado.
En el caso de control por facturación la red de drenaje ocurre por fallas y fracturas debido a que son zonas de menor resistencia. En consecuencia las redes de fracturas tienden a formar redes de tipo angular
Depósitos Fluviales
Los depósitos aluviales en los cauces de los ríos de cierta entidad son difíciles de reconocer directamente debido a problemas de escala y a la existencia de vegetación, sin embargo se pueden localizar por su posición topográfica.
Las terrazas fluviales son fáciles de identificar:
1. Superficies más o menos planas.
2. Borde escarpado y a cierta altura respecto al cauce actual del río.
3. Discontinuas.
4. Aparecen varios niveles, tantos más antiguos cuanto más altos.
Los conos de deyección aparecen sobre llanuras en la desembocadura de torrentes temporales. Su forma les hace ser fácilmente reconocibles en fotografía aérea.
Coluviones. Son depósitos formados por materiales arrancados de las laderas. Suelen presentar una morfología anómala respecto a la zona. Costras en lo alto de glacis de acumulación. Son depósitos horizontales de un color generalmente más oscuro. Tránsito suave entre la parte plana y el escarpe, forma palmeada.
Vegetación y Vegetación y Usos del Suelo
La vegetación aparece en general como manchas de tonos oscuros que dependerán de factores diversos como tipo de vegetación y estado vegetativo (cuanto más sana sea la planta más oscuro será el tono), humedad del suelo (cuanto mayor sea la humedad tanto en el suelo como en la planta más oscuro será el tono), época del año (los cereales dan lugar a manchas oscuras en invierno y claras en verano), inclinación solar, etc.
En general va a ser la forma que adopten las manchas visibles en la fotografía lo que nos va a dar las pistas más fiables para identificar componentes de vegetación natural o cultivada. La gran ventaja de la fotografía aérea sobre las imágenes de satélite es que el tamaño de pixel o tamaño de grano es inferior al tamaño de los objetos que se quieren identificar cuando se estudia vegetación. Esta afirmación es, sin embargo, cada vez menos cierta ya que se dispone hoy en día de imágenes de satélite con una resolución de 1 metro.

Es importante tener en cuenta la escala aproximada del fotograma para estimar las dimensiones reales de los objetos que estamos viendo a partir de su dimensión sobre el papel. Vegetales de diferentes especies pueden tener formas similares, en cuanto a su proyección sobre la superficie, pero variar en tamaño.
Otro elemento fundamental es la forma con que se disponen las manchas que observamos. Una disposición regular, formando mallas o siguiendo las curvas de nivel, indica normalmente cultivos; mientras que la vegetación natural suele disponerse en forma más irregular o con adaptaciones complejas a factores ambientales.
Estos factores ambientales constituyen una información contextual que resulta también de gran valor para identificar diferentes especies o usos del suelo debido a que condicionan la actividad de la vegetación directamente o a través del tipo de suelo a que dan lugar.
La topografía constituye un conjunto de factores primordiales. En primer lugar, la pendiente, orientación, área drenada, rugosidad
Litología. Algunos tipos de roca no permiten el desarrollo de la vegetación o, en todo caso, de una vegetación muy pobre (yesos por ejemplo). Sin embargo terrenos aluviales o suelos desarrollados sobre rocas carbonatadas con escasa pendiente van a permitir un desarrollo importante de la vegetación.
Geomorfología. Determinadas geoformas (fallas, fracturas, barrancos, etc.) pueden dar lugar a una concentración de agua que favorezca el desarrollo de la vegetación.
Clima A grandes rasgos a cada tipo climático le corresponde un tipo de vegetación, pero en el análisis de fotografías aéreas es necesario tener en cuenta las variaciones micro climáticas que pueden dar lugar a cambios en la vegetación. Por ejemplo determinadas especies son más susceptibles de aparecer en umbría que en solana, la altitud va a condicionar el microclima y por tanto las especies que aparezcan.
Por tanto resulta útil conocer la distribución espacial de todos estos factores antes de iniciar el trabajo de identificación de especies.

Fotografía aérea
(Universidad de Murcia, sf;http://www.um.es/~geograf/sig/teledet/fotogeol.html)

SEGÚN EL ÁNGULO DE EXPOSICIÓN
Es medido diagonalmente, la fotografía aérea puede ser de ángulo pequeño, normal, granangular y supergranangular.
a. De ángulo pequeño
Es utilizado con fines militares, como en el caso de las cámaras de reconocimiento o para elaboración de mosaicos. El ángulo de exposición es menor de 50º.
b. De ángulo normal:
Oscila entre 50° y 75°; se utiliza con éxito en elaboración de mapas de ciudades, en donde se requiere gran precisión planimétrica, debido a la relación favorable entre la base aérea y la altura de vuelo.
c. La Fotografía Granangular:
Se utiliza corrientemente en todos los campos de la fotogrametría y la fotointerpretación. Además sobre la base de esta fotografía se han diseñado muchos de los instrumentos fotogramétricos de uso más universal, ya que por mucho tiempo no logró superarse un ángulo de exposición mayor de 100° que no produjera grandes distorsiones en las fotografías.
d. La Fotografía Supergranangular
Logró superar este inconveniente, llegando a tener un campo angular de 120 y una distorsión aun bajo control. Su utilización permite grandes economías en todo el proceso fotogramétrico para producción de mapas, por cubrir cerca del doble del área de terreno que cubre una fotografía granangular, con una precisión equivalente.
Uso de la distancia principal.
NORMAL 60 GRADOS 210mm
GRAN ANGULAR 90 GRADOS 150mm
SUPER GRANANGULAR 120 GRADOS 90mm

SEGÚN EL FIN DE LA FOTOGRAFÍA
Esta se clasifica en panorámica, de faja continua, de reconocimiento y cartográfica.
Panorámica
Se toma con cámaras especialmente diseñadas para este propósito. La cámara va“barriendo” el terreno en dirección perpendicular a la de línea de vuelo; su cobertura lateral esmuy amplia, llegando hasta los 180º.
a.
Figura 1.11 Fotografía Panorámica
De Faja Continua
Utilizada en los Estados Unidos principalmente con fines de ingeniería en lo relativo atrazados de carreteras, líneas de conducción, líneas de alta tensión etc. Su construcciónpermite el paso continuo de la luz a través de una rejilla que impresiona la película fotográficaen movimiento.
El radar aunque no es fotografía, toma una imagen continua del terreno, por lo cual puedeconsiderarse dentro de esta clasificación.
b.
De Reconocimiento:c.
Usadas casi exclusivamente con fines militares, adquirió gran desarrollo durante la SegundaGuerra Mundial. Esta fotografía se toma con cámaras de distancia focal muy larga paramantener una escala aceptable aún volando a gran altura, lo que se hace necesario por elalcance de las baterías antiaéreas. Sin embargo, el cubrimiento terrestre por fotografía esmuy pequeño.
Cartográfica:
Es la fotografía utilizada para la elaboración de mapas o para realizar mediciones
d.

fotogramétricas precisas. Las cámaras cartográficas son cámaras métricas que tienen suselementos internos, como distancia focal, formato, plano focal, etc. perfectamentecalibrados.
d.

TEORÍA EPIPOLAR
Por medio de la teoría epipolar se explica la forma como debe ser colocado un par de fotografías afin de realizar su observación estereoscópica correctamente, especialmente en el caso de utilizarestereoscopios en los cuales las fotografías se colocan planas sobre una mesa.
En las Fig. a y b se consideran dos fotografías inclinadas que han sido tomadas desde dos puntos01 y O2.
La primera figura representa en un corte esquemático los centros de proyección (01 y O2), losplanos positivos (P1 y P2) de las fotografías y el terreno.
La segunda figura representa en perspectiva la misma situación pero se ha invertido la figura a finde visualizar mejor los elementos que aparecen en los planos (P1 y P2).
La línea que une los centros perspectivos 01, y 02 se llama eje epipolar. El eje epipolar, corta a losplanos positivos en dos puntos (K1 y K2) que reciben el nombre de epipolos.
Los planos definidos por el eje epipolar (01 y O2) y un punto cualquiera del terreno (R) se llamanplanos epipolares (01 O2 R).
Las líneas de intersección de los planos epipolares con los planos positivos de las fotografíasreciben el nombre de líneas epipolares (por ejemplo K1r1, y K2r2 siendo r1 y r2 las imágenes delpunto R del terreno en las fotografías.
Cuando se hace variar el punto R del terreno, por ejemplo a la posición Q se observará que laslíneas epipolares forman un haz de rectas con centro en K1 y K2'.
En visión estereoscópica normal, el punto R del terreno es observado según un plano epipolar (0,02R). En visión estereoscópica artificial el punto R del terreno ha sido reemplazado por lasimágenes de R en las fotografías (r1 y rV y para hacer la observación según planos epipolares lospuntos O1 02r1 y r2 deben pertenecer a un plano.
En la Fig.b puede observarse que los puntos 01 O2 R determinan un plano, y que a dicho planopertenecen también los puntos K1, K2, r1 y r2, es decir que la condición que los puntos 01 O2 r1yr2 pertenecen a un plano puede sustituirse por la condición que el eje epipolar (01 O2) y las líneasepipolares (K1 r1) Y (K2 r2) pertenezcan a un plano.
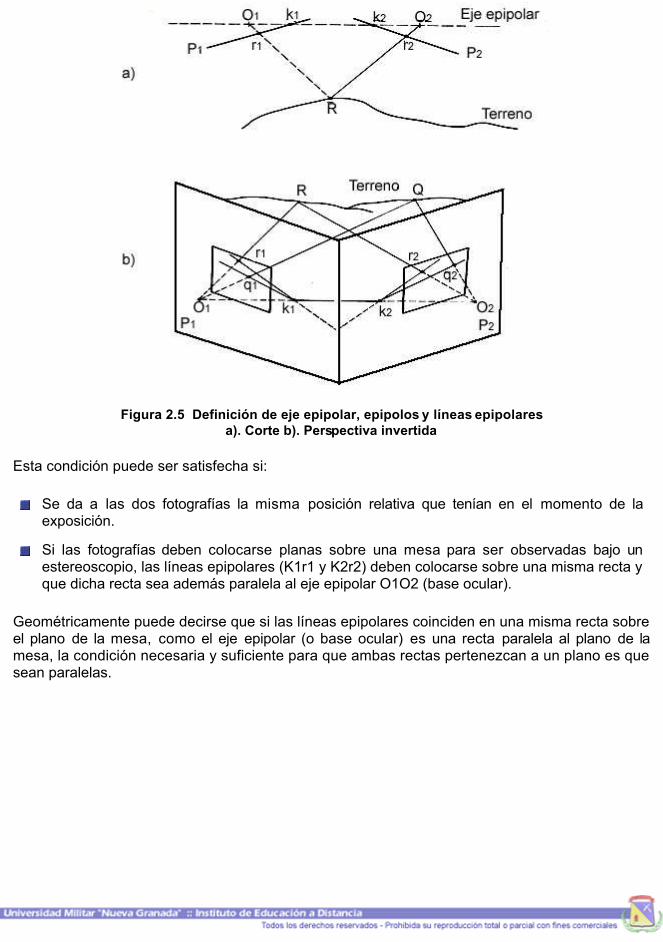
Figura 2.5 Definición de eje epipolar, epipolos y líneas epipolaresa). Corte b). Perspectiva invertida
Esta condición puede ser satisfecha si:
Se da a las dos fotografías la misma posición relativa que tenían en el momento de laexposición.
Si las fotografías deben colocarse planas sobre una mesa para ser observadas bajo unestereoscopio, las líneas epipolares (K1r1 y K2r2) deben colocarse sobre una misma recta yque dicha recta sea además paralela al eje epipolar O1O2 (base ocular).
Geométricamente puede decirse que si las líneas epipolares coinciden en una misma recta sobreel plano de la mesa, como el eje epipolar (o base ocular) es una recta paralela al plano de lamesa, la condición necesaria y suficiente para que ambas rectas pertenezcan a un plano es quesean paralelas.

Figura 2.6 Fotografías inclinadas orientadas para la observación estereoscópica de los puntosR y A, respectivamente.
Para observar estereoscópicamente el punto R será necesario ubicar las líneas epipolares K, r, yK2 r2 sobre una misma recta y que dicha recta sea paralela a la base del estereoscópico. Cuandose cambia el punto R, por otro punto A, cambiarán también las líneas epipolares y será necesariogirar las fotografías a fin de mantener la misma condición (Fig. 2.6). Para el caso de fotografíasverticales el problema se simplifica.
Si se considera un par de fotos verticales Fig. 2.7 se observará que el eje epipolar es paralelo alplano de las fotografías y que por consiguiente el epipolo es un punto impropio del plano de lafotografía definido por la dirección de vuelo (Koo tiene la dirección de la línea de vuelo).
Figura 2.7 Observación estereoscópica de fotografías verticales.
Si por r, y r2 se trazan las líneas epipolares, podrá observarse que dichas líneas forman un haz derectas paralelas a la línea de vuelo. Por consiguiente cuando se trata de fotografiar verticales, si secolocan las líneas de vuelo sobre una misma recta, automáticamente se tendrán todas las líneasepipolares también coincidiendo sobre rectas. Para la observación de fotografías verticales

bastará colocar el estereoscópico paralelo a la línea de vuelo y desplazarlo paralelo a sí mismo, deesta forma la base será siempre paralela a las líneas epipolares y la observación se realizarásegún planos epipolares.

PARALAJE
Paralaje estereoscópica o paralaje absoluta es el cambio en posición de la imagen de un mismopunto de fotografías, producido por el cambio en posición de la cámara. Se necesita la presenciade paralaje en X y de los ángulos paralácticos. (De Agostini Routin, 1978).
Figura 2.9 Paralaje
Paralaje en X
Paralaje en Y
Ángulo paraláctico

PARALAJE EN X
La paralaje X, que también se conoce como paralaje estereoscópica, es causado por una rotaciónen la posición de la observación. Para generar un par estéreo de fotos aéreas, una cámarafotográfica a bordo de un avión toma fotos de la tierra en diversas horas y diversas posiciones.Para generar un par estéreo de imágenes de satélite se necesita que los datos sean recogidosdesde dos ángulos o posiciones de vista distintas. El cambio en los puntos de observación causauna rotación aparente en la posición de un objeto con respecto a la imagen de referencia (quedebe ser la de ángulo más bajo, para el caso del radar). Dos aspectos fundamentales a tener encuenta en el paralaje estereoscópico son:
El paralaje de cualquier punto se relaciona directamente con la elevación de ese punto
El paralaje es mayor para elevaciones más altas que para elevaciones bajas, manteniendoun ángulo de vista constante
Estas dos relaciones permiten hacer medidas de elevación a través de un par estéreo
Figura 2.10 Paralaje estereoscópico
Donde:
A: punto arbitrario en superficie tierra, a una elevación baja
B: punto arbitrario en la superficie tierra, a una elevación alta
a1,b1 puntos "A" y "B" como reflejados en la imagen izquierda
a2,b2 punta "A" y "B" como reflejados en la imagen derecha
Xa: paralaje en X debido a la elevación del punto "A" sobre el plano de referencia
Xb: paralaje en X debido a la elevación del punto "A" sobre el plano de referencia
Ha: altura del punto "A" sobre el plano de referencia
Hb: altura del punto "B" sobre el plano de referencia

PARALAJE EN Y
El paralaje de Y está presente en muchos pares estéreos. Es la diferencia en distancias entre dosimágenes de un punto contenido en el plano vertical que contiene la base aérea. Puede sercausado por la inclinación de una o ambas imágenes respecto a un sistema de referencia exterior
La inclinación puede ocurrir como resultado del desvío del avión. La paralaje de Y se puede causartambién por una variación en alturas de vuelo o si las imágenes se imprimen en escalaslevemente diferentes. Finalmente, la paralaje de Y puede ocurrir si el espectador pone en línea lasimágenes incorrectamente.
a. Paralaje Y debido a la inclinación
Figura 2.11 Debido a la inclinación
Donde:
a1, b1, c1, d1, = Puntos arbitrarios en una imagena2, b2, c2, d2, = Puntos correspondientes en la otra imagen con inclinaciónPya = Paralaje en Y del punto "a" debido a la inclinaciónPyc = Paralaje en Y del punto "c" debido a la inclinación
b. Paralaje Y debido a la variación en alturas de vuelo
Figura 2.12 Variación en alturas de vuelo

Donde:
a1, b1, = Puntos arbitrarios en una imagena2, b2 = Puntos correspondientes en la otra imagen no alineadaPya = Paralaje en Y del punto "a" debido a la pérdida de alineaciónPyc = Paralaje en Y del punto "c" debido a la pérdida de alineación
a1, b1, = Puntos arbitrarios en una imagena2, b2 = Puntos correspondientes en la otra imagen con diferente escalaPya = Paralaje en Y del punto "a" debido a la diferencia en escalaPyc = Paralaje en Y del punto "c" debido a la diferencia en escala
a2, b2
c. Paralaje Y debido a la alineación
Figura 2.13 Debido a la alineación
cerebro compensa esto y el modelo tridimensional sigue siendo visible. En cantidadesgrandes, el paralaje de Y hace imposible la visión estérea.
En cantidades pequeñas, el paralaje de Y puede causar fatiga visual, sin embargo, el

ÁNGULO PARALÁCTICO
El ángulo paraláctico, también conocido como ángulo de convergencia, es formado por laintersección de la línea de vista del ojo izquierdo con la línea de vista del ojo derecho. El punto máscercano a los ojos de estas intersecciones tiene el ángulo de convergencia más grande. Elcerebro percibe la altura de un objeto asociando la profundidad en su tapa y su base a los ángulosde convergencia que se forman viendo la tapa y la base. El paralaje de X y el ángulo paralácticoestán relacionados, mientras que el paralaje de X aumenta, también lo hace el ángulo paraláctico
Figura 2.14 Ángulo Paraláctico
Donde:
A: punto arbitrario a una elevación alta
B: punto arbitrario a una elevación baja
Øa: ángulo de convergencia más grande para un punto de alta elevación
Øb: ángulo de convergencia más pequeño para un punto de baja elevación
DA distancia vertical aparente al punto "A"
DB : distancia vertical aparente al punto "B"
DBDA: diferencia en distancia vertical aparente de los puntos "A" y "B"

EXAGERACIÓN VISUAL
La exageración vertical está presente en todos los pares estéreos y se debe a la disparidad entrelas escalas verticales y horizontales de un modelo estéreo. En condiciones normales, la escalavertical es mayor que la horizontal. Los intérpretes de la imagen deben tomar este efecto enconsideración al estimar elevaciones de objetos o índices de pendientes.
La exageración vertical es mejor interpretada cuando se considera la relación entre la geometríade proyección de imagen y la geometría de vista de un modelo estéreo.
La exageración vertical es la diferencia entre las relaciones de la base de la proyección de laimagen (distancia entre los puntos de toma de las imágenes) a la altura de vuelo y la base de lavisión estérea a la altura desde la cual el estéreo modelo es visto usando algún dispositivo devisión estereoscópica. En los siguientes gráficos la primera relación se representa como Bn/Hn,en tanto la segunda como Bs/Hs.
Bn/Hn es la relación de la base aérea (distancia entre los dos puntos de toma de imagen) a laaltura de vuelo sobre el geoide. Bs/Hs es la relación de la base ocular a la distancia desde los ojosa la cual el modelo estéreo es visto.
a. Exageración Vertical – Geometría de imagen
Figura 2.15 Geometría de la imagen
Donde:
Bn = Base aéreaHn = Altura de vueloWn = Amplitud del objetopn = Paralaje del punto "A" debido a la elevación hnhn = Altura del objeto

b. Exageración Vertical – Geometría de vista – estéreo
Figura 2.16 Geometría de vista
Donde:
Bs = Base del par estéreoHs = Altura de visión en estéreoWs = Amplitud aparente del objetohs = Altura aparente de "A"ps = Paralaje aparente del punto "A"pi/2 = Mitad de ps medido en la imagenwi/2 = Mitad de ws medido en la imagen

ESTEREOSCOPIOS DE BOLSILLO
El principio de estos instrumentos se basa en la observación binocular con ejes paralelos.
Figura 2.17 Estereoscopios de Bolsillo
a. Descripción
constan en general de un par de lentes plano-convexas, cuya distancia focal esaproximadamente 80 mm. y un soporte.
Están diseñados para uso en el campo pero también prestan gran ayuda en trabajos deoficina. La distancia focal de las lentes es de 80 mm. lo que da un aumento aproximado de250/80 =3 veces y permite ver imágenes claras y nítidas.
Naturalmente se encuentran variaciones entre los diferentes diseños. Hay algunos condistancia interpupilar fija de 6.5 cm. mientras que otros tienen la posibilidad de variar estadistancia entre 5.5 cm. y 7.5 cm.; unos vienen con lentes reemplazables y otros traeninclusive una pequeña barra de paralaje que permite el cálculo aproximado de diferencias dealtura.
Se emplean para observar fotografías de 23 cm. x 23 cm. o 18cm x 18cm (dobladas osuperpuestas) y también sirven para hacer la observación estereoscópica deestereogramas con franjas de 6.5 cm. de ancho, permitiendo así el uso de la cuña deparalaje, con la cual se pueden calcular diferencias de altura de puntos en formaaproximada.
El estereoscopio de bolsillo Wild TSP tiene además pequeños espejos, adicionados quepermiten observar fotografías de 23 cm. x 23cm (hasta 70% de recubrimiento) sin necesidadde doblarlas. Existe la posibilidad de equiparlos con un dispositivo de conducción paralela,cuyo montaje es sencillo. También se le puede adicionar una lupa con soporte que facilita laacomodación de los ojos al pasar de la visión estereoscópica a la carta topográfica, lomismo que un sistema de iluminación fluorescente que proporciona un alumbrado óptimo.Para su uso en el terreno se recomienda el empleo de la Tablilla de terreno, donde lafotografía se fija con imanes permanentes.
Dentro de este grupo es posible incluir los anteojos estereoscópicos que son sencillamenteun par de anteojos con lentes apropiados, que permiten la visión estereoscópica de dosfotografías colocadas a una distancia conveniente y con su recubrimiento en la debidaforma. Son de mucha utilidad en el campo.

b. Manejo del Instrumento
Para el uso del estereoscopio de bolsillo sólo hay que tener en cuenta que la línea de vuelodel par estereoscópico sea paralela a la línea que une los dos centros ópticos y que ladistancia entre puntos homólogos sea igual a la correspondiente entre dichos centros.
Las principales ventajas del estereoscopio de bolsillo son:
Su bajo costo
Su rápido manejo
Su tamaño pequeño y facilidad de transporte Las desventajas son:
La limitación del aumento
La distancia entre puntos homólogos debe ser aproximadamente igual a la baseocular (65mm), lo cual dificulta la observación de fotografías de 23cm x 23cm.
El espacio reducido entre el instrumento y las fotografías, que dificulta el dibujosobre éstas.

ESTEREOSCOPIOS DE ESPEJOS
Las desventajas mencionadas para el estereoscopio de bolsillo condujeron a la construcción delestereoscopio de espejos, donde la distancia entre puntos homólogos varia de 21 a 26 cm.,permitiendo la observación completa de un modelo formado por fotografías de 23cm x 23cm. Estadistancia entre puntos homólogos es la que se denomina base del estereoscopio.
El principio de este instrumento es simplemente la observación binocular con ciclos paralelos, talcomo se aprecia en la Fig 2.18.
Figura 2.18 Estereoscopio de Espejos
a. Descripción
Básicamente consta de los siguientes elementos.
Un par de lentes (o binoculares).
Dos prismas (o espejos) a 45°.
Dos espejos grandes montados sobre una armadura metálica. i
La distancia de observación es de 30 cm. lo que daría un aumento de 250/300= O.8x; peropermite la adición de binoculares, para lograr en esta forma un aumento de 3x hasta de 8veces el original. Cuanto mayor es el aumento, menor es lógicamente el área de fotografíaobservada.
Aunque puede emplearse en trabajos de campo, su principal utilidad se encuentra en laoficina. Permite la interpretación de pares estereoscópicos para estudios detallados,semidetallados o generales y facilita la observación estereoscópica sin producir fatigas y elcálculo de diferencias de altura entre puntos utilizando una barra de paralaje. En esta formase evitan las salidas preliminares al campo, a donde se va posteriormente, para laverificación sobre el terreno de las fotografías interpretadas. Permite la transferencia depuntos de una foto a otra y facilita la estimación de pendientes por medio de aparatossencillos (comparador de pendientes, Me- k el, etc.).

Dentro de este tipo de estereoscopios se producen varios diseños con el fin de adaptarlos alas necesidades que se presentan en los diferentes trabajos; pero los principios básicos delinstrumento se conservan.
b. Ajuste
El ajuste del instrumento consiste tan solo en enfocar y ajustar los binoculares y en medir ocalibrar la base a fin de trabajar con la base correcta del estereoscopio.
Algunos estereoscopios traen calibrada dicha base y por medio de tornillos se ajusta alvalor correspondiente.
En otros, la base del estereoscopio debe ser medida por el operador, operación que seefectúa mediante los siguientes pasos:
1. Enfocar los binoculares y ajustarlos a la distancia interpupilar.
2.Trazar una recta de aproximadamente 35 cm. de longitud sobre una cartulinapreviamente colocada sobre la mesa y marcar un punto A en la parte izquierdade dicha recta.
3. Ubicar el estereoscopio sobre la mesa para que al observar con el ojo izquierdoel punto A aparezca en el centro del campo de visión, y que al mirar con ambosojos, los segmentos de recta coincidan sobre una misma dirección.
4. Mirar únicamente con el ojo derecho y marcar un punto B sobre la línea, en elcentro del campo de visión. La distancia AB es la base instrumental delestereoscopio. Al observar con ambos ojos al mismo tiempo, los puntos A y Bdeberán coincidir. La observación se está haciendo con los ejes de los ojosparalelos.
En algunos estereoscopios, al mover los binoculares para ajustarlos a la distanciainterpupilar del operador, los prismas (o espejos pequeños) permanecen fijos. En este casola base instrumental varía de acuerdo a la base ocular como ocurre por ejemplo, en losestereoscopios marca Topcon.
En otros, el movimiento de los binoculares y de los prismas (o espejos pequeños) essimultáneo (estereoscopios Wild) y en esta forma la base instrumental se conservaconstante para cualquier distancia interpupilar.
c. Manejo del Instrumento
Orientación de fotos aéreas verticales bajo un estereoscopio de espejos.
En general se presentan algunas variaciones de acuerdo al diseño del estereoscopio: peroel principio básico es el mismo y su empleo es muy sencillo. Para la orientación de fotosaéreas bajo un estereoscopio de espejos, deben seguirse las siguientes etapas.

Colocar las dos fotografías en la misma secuencia en que ap arecen en la faja demanera que las sombras caigan hacia el operador.
Marcar los puntos principales p’1 y p’2' y transferirlos a las fotos adyacentes (p¡' y p’2 )para definir la línea de vuelo en cada foto (p’1 P'2) y (p'1,' p'2’).
Las líneas de vuelo marcadas en cada fotografía se deben colocar sobre una mismarecta.
Puntos homólogos (por ejemplo el punto principal izquierdo p’1 y su transferido p'1')deben estar a una distancia igual a la base instrumental. En esta situación se peganlas fotos a la mesa y para observar el modelo se debe mover el estereoscopio.
Mover el estereoscopio de manera que su base ocular se mantenga paralela la línea devuelo; en esta forma se podrá observar todo el modelo según planos epipolares.

CONSTRUCCIÓN DE UN ESTEREOSCOPIO DE ESPEJOS
Figura 1
Introducción
La importancia que la interpretación de la fotografía aérea vertical tiene tanto en Geología, como en los estudios del medio físico en general (ordenación del territorio, prevención de riesgos, obras públicas, urbanismo,...), hace que sea una práctica interesante para alumnos de Ciencias de la Tierra y Geología, resultando además una actividad motivadora para ellos.
El material necesario suele estar disponible en los Centros: las fotografías aéreas (pares estereoscópicos) suelen formar parte del material de prácticas (aunque muchas veces en forma de pares preparados, aptos para su observación con estereoscopio de bolsillo y no con el de espejos) y es frecuente contar con estereoscopios de bolsillo (fig.2), más manejables pero también más incómodos y difíciles de utilizar.
Figura 2. Estereoscopio de bolsillo
Sin embargo, es frecuente que algunas personas tengan dificultades para obtener la visión tridimensional empleando esos aparatos. En cambio, el estereoscopio de espejos reúne las ventajas de facilitar la visión estereoscópica sin esfuerzo y permite dibujar o anotar más fácilmente en papel vegetal (acetatos, kodatrace) sobre las fotos. Pero estos aparatos no suelen contarse entre la dotación de los laboratorios (caso de mi Centro) y tienen un precio prohibitivo, es decir costosos.
Así que, si se quiere disponer de un número suficiente de ellos, se tienen que construir, tarea por otra parte que resulta sumamente sencilla y que ofrece resultados realmente buenos. Tan sólo la carencia de lentes (que de todos modos se podrían poner) hace que la imagen se vea algo menor que la observada con los estereoscopios comerciales, apreciándose menos detalle.

El modelo que aquí se propone no es original, sino que se basa, con modificaciones, en esquemas de Gómez y Alvira (1988), Aguerre et al. (1986, 1997) y, sobre todo, en uno real, construido en plástico y plegable, que poseen algunos Centros como parte de su dotación.
Material y Montaje
El estereoscopio presentado (figura 1) se ha construido en madera aglomerada de 10 mm. de espesor encolando entre sí las piezas A y B (figura 3), aunque también se puede utilizar madera contrachapada de igual espesor.
Los soportes centrales para los dos espejos pequeños son listones de 45x10 mm, pero igualmente se pueden emplear piezas de la misma madera que el resto o listón de otra medida, ajustando convenientemente las medidas indicadas.
Figura 3
En una de las piezas frontales B se ha realizado una escotadura o rebaje en de la parte central del borde superior (señalado con una línea de puntos en el croquis de montaje) para hacer más cómoda la posición del rostro. En el otro frente B se ha hecho también un rebaje de 18 mm., pero ahora en su parte inferior con la finalidad de reducir su área y mejorar la llegada de luz a la zona de trabajo. Los espejos mayores miden 145x120 mm. y 3 mm, de espesor, el mínimo encontrado en el comercio.
Figura 4.Esquema de las piezas y medidas
Tomada de: http://platea.cnice.mecd.es