una nueva aproximación al control de cargas estructurales · 2019-05-23 · referencia inercial...
TRANSCRIPT

Una nueva aproximación al
control de cargas estructurales
Indice
Introducción a MLS
Control individual de pala
Aislando la dinámica de la palaAislando la dinámica de la pala
Control de momento en la pala
Conclusiones
Wind PowerExpo, 22-24 September 2009 2

Introducción a MLS
Tecnología de Control de Turbinas
Actuadores de Pitch y Yaw
MLS
July 2009 Confidential 3
Motores, reductoras, sensores.
Diseño, producción y soporte local
MLS

Introducción a MLS
July 2009 Confidential 4
Linear Electric
Pitch

Introducción a MLS
Ventas
Producción
Investigación y Desarrollo
July 2009 5Confidential
Servicio Técnico
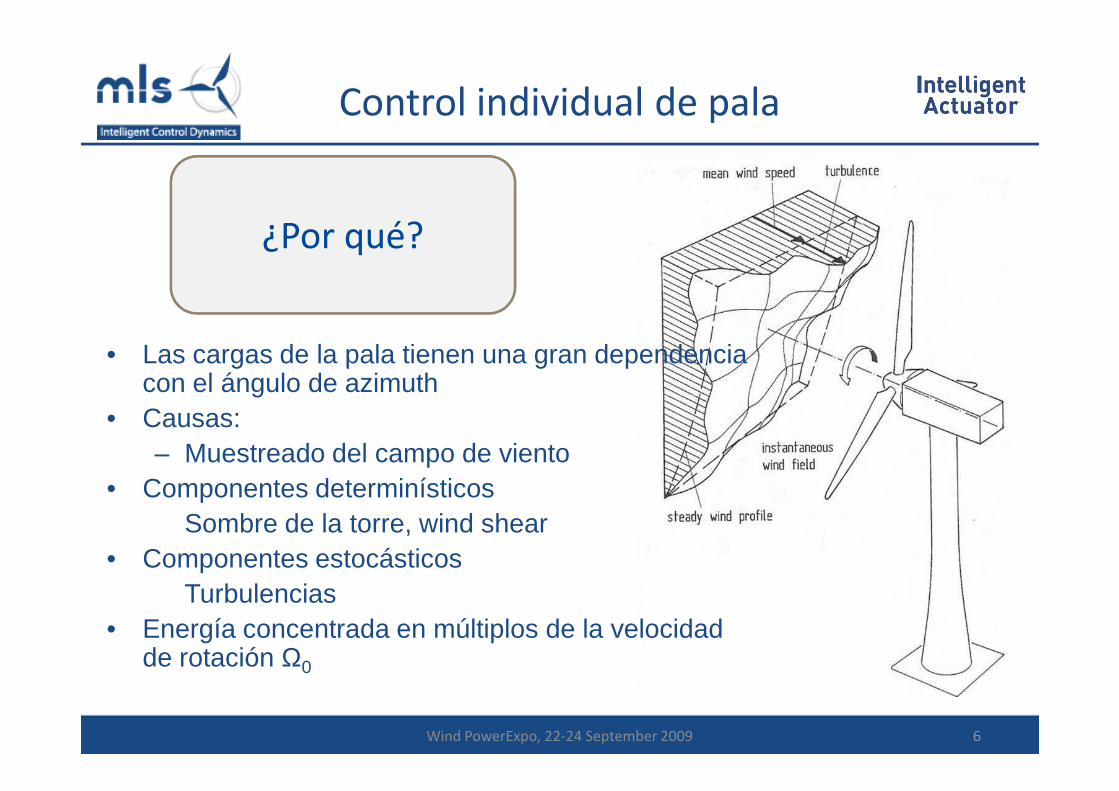
• Las cargas de la pala tienen una gran dependenciacon el ángulo de azimuth
Control individual de pala
¿Por qué?
con el ángulo de azimuth• Causas:
– Muestreado del campo de viento• Componentes determinísticos
Sombre de la torre, wind shear• Componentes estocásticos
Turbulencias• Energía concentrada en múltiplos de la velocidad
de rotación Ω0
Wind PowerExpo, 22-24 September 2009 6

Control colectivo de pala
Controlador
central
Dinámica
de la
turbinaωγ
G(s)/sβd
Actuador de
pitch
actuator
controller
actuator
dynamics
- βa-
ωd
• El actuador de pitch lleva el ángulo de la pala, βa, al ángulo
requerido por el controlador central, βd.
• El integrador (1/s) en el controlador central lleva el error de
velocidad (ωd – ωg) a cero: la velocidad del rotor , ωg, sigue la
referencia , ωd.
pitch
Wind PowerExpo, 22-24 September 2009 7
ω
actuador
βd
βd
βd
Velocidad
del rotorReferenciaControlador
CentralDinámica
de la
Control colectivo de pala
actuador
18/03/2009
ωg
EWEC 2009
βd
de la
turbina
actuador

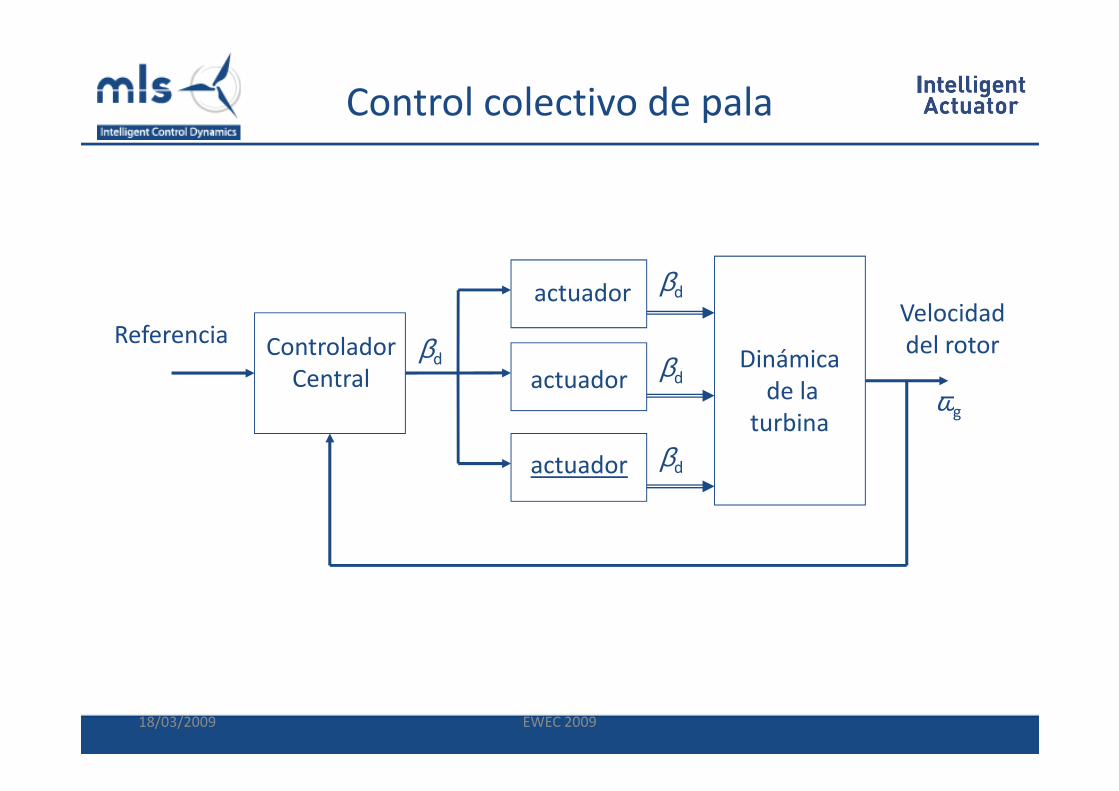
• El control colectivo regula la velocidad del generador especificando el mismo angulode paso para las tres palas
Control colectivo de pala
de paso para las tres palas
• Las diferencias de viento en las tres palascrean desequilibrios en el rotor
Wind PowerExpo, 22-24 September 2009 9

Control individual de pala
• Usado a velocidades de viento superiores a la nominal
Individual pitch control - tradicional
Wind PowerExpo, 22-24 September 2009 10
• Usado a velocidades de viento superiores a la nominal
• Ha mostrado un gran potencial para reducir las cargasasimétricas en el rotor
• Incluido en el controlador central
• Específico a cada turbina y dificil de ajustar
• Emplea la transformación d-q

Control individual de pala
• Usado a velocidades de viento superiores a la nominal
Individual pitch control – IA
Wind PowerExpo, 22-24 September 2009 11
• Usado a velocidades de viento superiores a la nominal
• Ha mostrado un gran potencial para reducir las cargasasimétricas en el rotor

Control individual de pala
Dinámica
de la ωG(s)/sΜd actuator
controllerActuador+blade
dynamics
- Μa-
ω
• El ángulo de paso de pala tiene una relación directa con el momento
en la pala. Esa relación depende de la velocidad del viento.
• El actuador de pitch lleva el momento de la pala, Μa, al
momento requerido, Μd.
• El integrador del controlador central todavía lleva el error de
velocidad (ωd – ωa) a cero.
de la
turbinaωa
G(s)/s
Actuador de
momento
controller dynamicsωd
Wind PowerExpo, 22-24 September 2009 12
Controlador
central

Control individual de pala
Controlador
CentralDinámica
de la
β1
β2
M1
M2
ω
Velocidad
del rotorReferencia
actuador
+ control
actuador
+ control
βd
de la
turbina
β3
M3
ωg
+ control
actuador
+ control
Wind PowerExpo, 22-24 September 2009 13
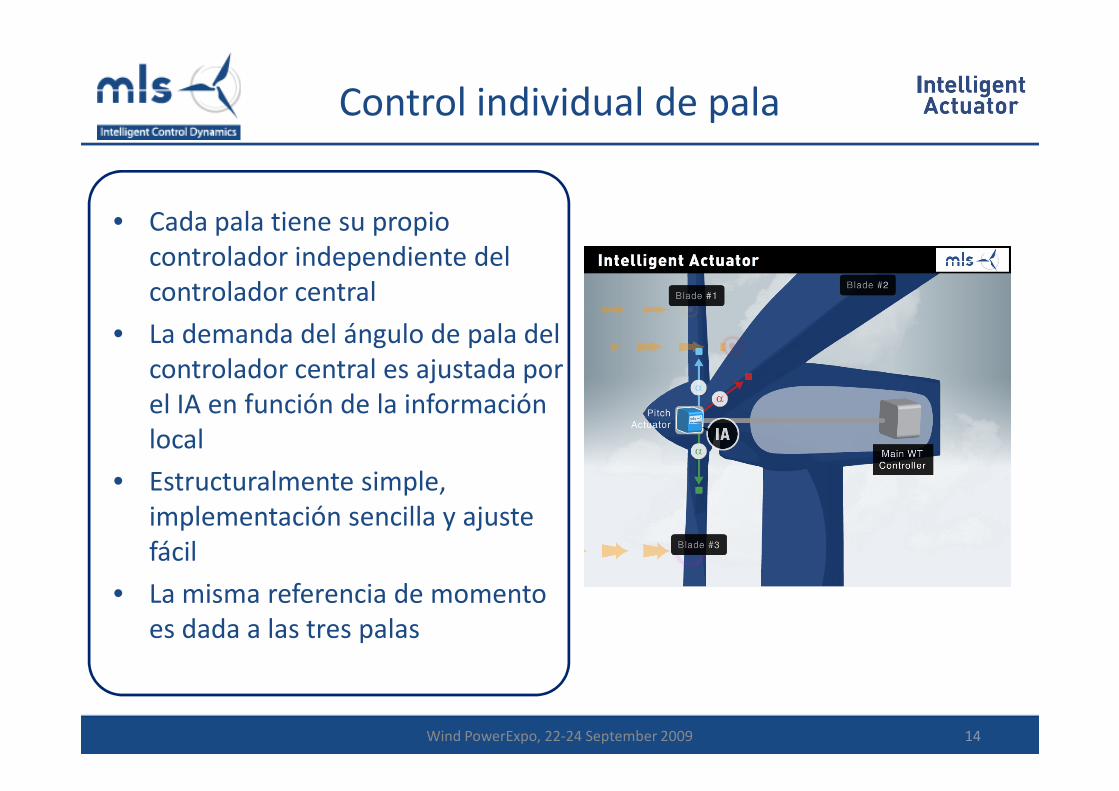
• Cada pala tiene su propio
controlador independiente del
controlador central
• La demanda del ángulo de pala del
controlador central es ajustada por
el IA en función de la información
Control individual de pala
el IA en función de la información
local
• Estructuralmente simple,
implementación sencilla y ajuste
fácil
• La misma referencia de momento
es dada a las tres palas
Wind PowerExpo, 22-24 September 2009 14
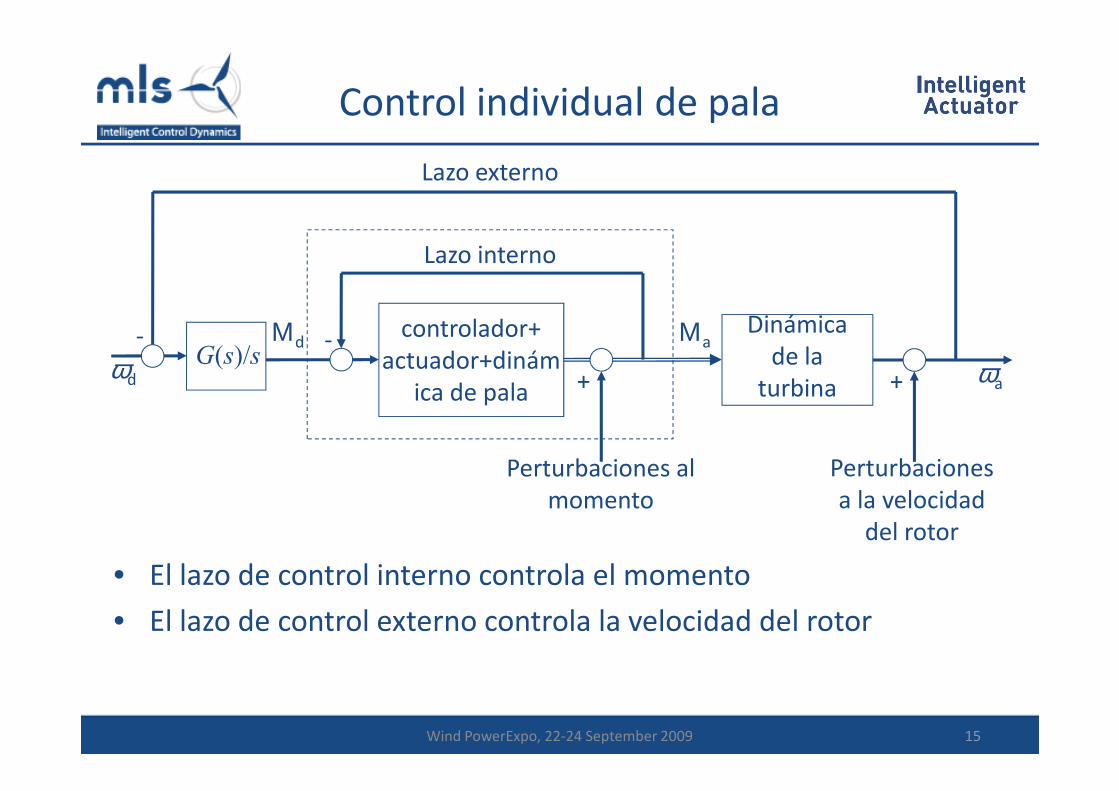
Control individual de pala
Dinámica
de la
turbinaωa
G(s)/sΜd
Lazo interno
controlador+
actuador+dinám
ica de pala
- Μa-
ωd + +
Lazo externo
• El lazo de control interno controla el momento
• El lazo de control externo controla la velocidad del rotor
turbinaica de pala
Perturbaciones
a la velocidad
del rotor
Perturbaciones al
momento
Wind PowerExpo, 22-24 September 2009 15

No hay conflicto entre el lazo interno y el externo si hay:
Control individual de pala
• Lazo interno tiene una frecuencia más alta
• Lazo externo tiene un ancho de banda másreducido
Separación de frecuencias
Wind PowerExpo, 22-24 September 2009
• Lazo externo tiene un ancho de banda másreducido
• Dinámica que controla el lazo interno
• Dinámica que controla el lazo externo
No hay interacción entre
16

Este no es el caso
Control individual de pala
Las limitaciones del actuador imponen restriciones en el ancho de banda del lazo interno
El lazo interno pretende regular componentes del momento hasta 1W0 or 2W0 siendo W0 ~2rad/s.
Wind PowerExpo, 22-24 September 2009
• Velocidad del rotor ~1rad/s.• Componentes en la dinámica de la torre cercanasa la frecuencia natural de la torre ~2rad/s.
El lazo externo pretende regular
La dinámica de la pala interacciona con la dinámicadel resto de la turbina
17

Principio usado para desacoplar la dinámica de la torre de la del
resto de la turbina:
Aislando la dinámica de la pala
• La dinámica de un sistema en un sistema de referencia no-
inercial es igual a la dinámica del sistema en un sistema de
referencia inercial más unas fuerzas ficticias proporcionales a referencia inercial más unas fuerzas ficticias proporcionales a
la aceleracion relativa de un sistema de referencia respecto al
otro
• Ejemplo común de fuerzas ficticias
– Fuerza centrífuga
Wind PowerExpo, 22-24 September 2009 18
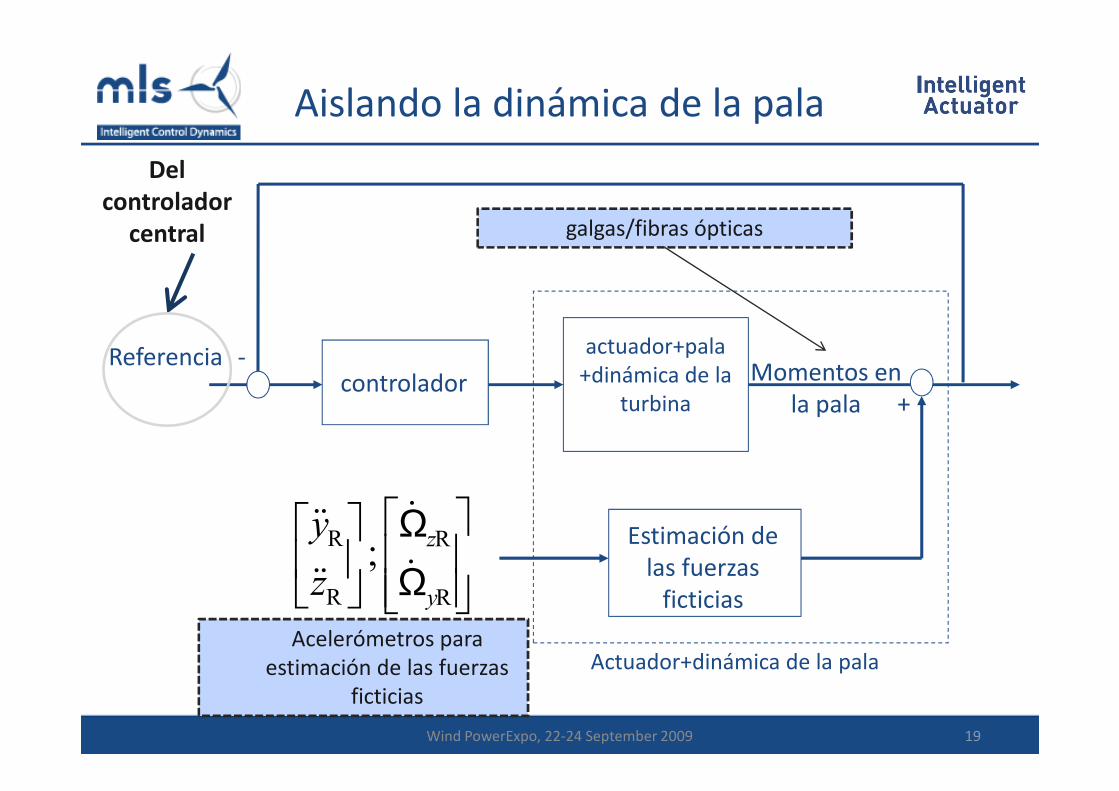
Referenciacontrolador
actuador+pala
+dinámica de la
turbina
-
+
Momentos en
la pala
Del
controlador
central galgas/fibras ópticas
Aislando la dinámica de la pala
ΩΩ
R
R
R
R;
y
z
z
y
&
&
&&
&& Estimación de
las fuerzas
ficticias
controladorturbina +la pala
Actuador+dinámica de la pala
Wind PowerExpo, 22-24 September 2009
Acelerómetros para
estimación de las fuerzas
ficticias
19

Control no-lineal;
switching
Control de momento de pala
Dinámica del accionador
y la pala compensado
con las fuerzas ficticias
Compensación de las
no-linealidades del
controlador central
Controlador de
paso de pala
Wind PowerExpo, 22-24 September 2009 20

Control de momento de pala
Collective Pitch
CB1 activew/o CB1
Frecuencia natural
de la torre: no hay
ninguna influencia
de IA con la
compensación
adecuada
Frecuencia de
rotación 1P:
reducción de
la aceleración
Resultado de la compensación de fuerzas
ficticias: aceleración fore-aft de la torre
Frequency (rad/s)
PS
D (
2 /rad
)
adecuadala aceleración
en el rango
de 1P

Control de momento de pala
Caracteristicas del diseño
Regulación del momento out-of-plane hasta unafrecuencia de 2Ωo rad/s.
La dinámica del actuador no debe cambiar frente al
Wind PowerExpo, 22-24 September 2009 22
La dinámica del actuador no debe cambiar frente al controlador central
La ganancia aerodinámica no-lineal es compensada porun control no-lineal global
La transición de encendido/apagado del controladordebe ser suave y sin saltos discretos

Cargas en el eje central Cargas en la pala
Control de momento de pala
Resultado de reducción de cargas del IA
Frequency (rad/s)
PS
D(N
m2 /r
ad)
Cum
ulat
ive
PS
D (
Nm
2 )
Reducción de fatiga 18%Reducción de fatiga 24%
Frequency (rad/s)
PS
D (
Nm
2 /rad
)
Cum
ulat
ive
PS
D (
Nm
2 )
Wind PowerExpo, 22-24 September 2009 23

Conclusiones
Control
colectivo
Wind PowerExpo, 22-24 September 2009
Control de pala
individual
24
IA está basado en un lazo interno de control para regular las
cargas en la pala
El lazo externo de control se usa para regular la velocidad del
generador
Conclusiones
generador
La dinámica de la pala se puede aislar mediante la medida de las
aceleraciones
Reducción de los desequilibrios de las cargas en el rotor y
cancelación de los efectos de nP
Wind PowerExpo, 22-24 September 2009 25

• Ventajas
– Reducción completa de 1P y 2P
– El diseño depende solo de la
dinámica de la pala
– Fácil de ajustar
– Invisible para el controlador
Conclusiones
– Invisible para el controlador
central
– Localizado en el buje
– Independiente del actuador de
pitch
– Posibilidad de incorporar en
instalaciones existentes
Wind PowerExpo, 22-24 September 2009 26

Wind PowerExpo, 22-24 September 2009 27