trabajo fin de grado grado en ingeniería de las...
TRANSCRIPT
i
Trabajo Fin de Grado
Grado en Ingeniería de las Tecnologías
Industriales
Estudio de las cargas de colapso en soportes
compuestos mediante análisis con elementos finitos y
comparativa con métodos teóricos.
Autor: Magali Vargas Girón
Tutor: Luis Rodríguez de Tembleque Solano
Dep. Mecánica de los Medios Continuos y Teoría
de Estructuras
Escuela Técnica Superior de Ingeniería
Universidad de Sevilla
Sevilla, 2014

Trabajo Fin de Grado
Grado en Ingeniería de las Tecnologías Industriales
Estudio de las cargas de colapso en soportes
compuestos mediante análisis con elementos finitos
y comparativa con métodos teóricos.
Autor:
Magali Vargas Girón
Tutor:
Luis Rodríguez de Tembleque Solano
Profesor Contratado Doctor
Dep. Mecánica de los Medios Continuos y Teoría de Estructuras
Escuela Técnica Superior de Ingeniería
Universidad de Sevilla
Sevilla, 2014

Proyecto Fin de Carrera: Estudio de las cargas de colapso en soportes compuestos mediante análisis con elementos finitos y comparativa con métodos teóricos.
Autor: Magali Vargas Girón
Tutor: Luis Rodríguez de Tembleque Solano
El tribunal nombrado para juzgar el Proyecto arriba indicado, compuesto por los siguientes miembros:
Presidente:
Vocales:
Secretario:
Acuerdan otorgarle la calificación de:
Sevilla, 2014
El Secretario del Tribunal


A mi familia, en especial a mi
padre.

i
Agradecimientos
Quisiera expresar mi más sincera gratitud al Prof. Luis Rodríguez de Tembleque, tutor de este
proyecto , por su apoyo confianza y dedicación durante todo el desarrollo del mismo. También por
haberme animado a llevar este proyecto hasta el final a pesar de haber tenido mis dudas.
Tambien deseo mostrar mi agradecimiento a todas las personas que directa o indirectamente
han contribuido en este trabajo. De entre ellas, destacar a mi hermana Leticia , mi principal
compañera de fatigas con la que he compartido todas y cada una de mis sensaciones e ideas
durante el desarrollo de este proyecto.
No quisiera dejar atrás tampoco a mi hermana Verónica, la que sea antigua alumna de esta
escuela, ya que ha sido capaz de animarme y ser positiva en los momentos en los que me podrían
haber faltado fuerzas para llevar adelante tanto este proyecto, como todos los proyectos personales
que he desarrollado durante la elaboración de este trabajo.
Por supuesto, no dejar de nombrar a mi querida madre, Myrna, a la que le estaré eternamente
agradecida por hacerme mantener los pies en la tierra, sabiendo establecer prioridades. Ha sido
capaz de inculcarme la ambición justa y necesaria para alcanzar mis metas, como era terminar mis
estudios presentando este trabajo.
Por último no me quiero olvidar de mis compañeros de clase, muchos de los cuales empezaron
conmigo y ahora acaban también conmigo. Gracias a ellos todo es siempre mucho mas llevadero y
fácil. Nombrar especialmente a mi inseparable compañera y amiga Marta Ruiz, con la que he
compartido absolutamente cada paso dado en la elaboración del proyecto.
Muy agradecida a todos, muchísimas gracias.

iii
Resumen
En este proyecto se estudian las cargas de colapso en soportes compuestos metálicos haciendo
uso del análisis de pandeo lineal y no lineal con elementos finitos. Los valores obtenidos serán
analizados y comparados con los valores teóricos y los propuestos por la Instrucción de Acero
(EAE), y el Eurocódigo 3.
Este análisis con Elementos Finitos (AEF) se realizará haciendo uso del software comercial
ANSYS ®. El cual nos permite estudiar numéricamente la influencia de diversos parámetros, como
la separación entre cordones, sobre las cargas de colapso del soporte.
Por último, señalar que además de los estudios teóricos y numéricos, el proyecto va a realizar
un recorrido por la teoría clásica que sustenta el análisis de pandeo y que posteriormente
analizaremos. Así como, también se introducirán previamente las características más importantes
de los soportes compuestos y las teorías utilizadas para resolver el problema. Siendo éstas las
propuestas por el Eurocógido 3 [7] y la segunda de ellas, por la teoría [5], resultando de una
investigación analítica y numérica de las cargas de colapso en dichos soportes.

iiii

iv
Índice
Agradecimientos ..................................................................................................................................................................................i
Resumen................................................................................................................................................................................................ iii
Índice ...................................................................................................................................................................................................... iv
Índice de Figuras .......................................................................................................................................................................vii
1. Introducción................................................................................................................................................................................. 11
1. 1 Motivación .......................................................................................................................................................................... 11
1. 2 Objetivos Generales .................................................................................................................................. .................... 12
1. 3 Estructura y Contenido del Proyecto ................................................................................................................... 13
2. Pandeo de Columnas o Soportes ....................................................................................................................................... 14
2. 1 Breve Introducción al Pandeo .................................................................................................................................. 14
2. 2 Recorrido por la Teoría de Euler ............................................................................................................................ 15
2. 3 Comportamiento de Columnas Imperfectas con deformación inicial ................................................. 19
2. 4 Diferencias entre el análisis Lineal y No Lineal............................................................................................... 24
2. 4. 1 Geometría No Lineal ....................................................................................................................................... 24
2. 4. 2 No Linealidad Material .................................................................................................................................. 26
2. 5 Pandeo en Régimen Anaelástico ........................................................................................................ .................... 27
2. 5. 1 Teoría del Doble Módulo .............................................................................................................................. 28
2. 5. 2 Teoría del Módulo Tangente ...................................................................................................................... 32
3. Cálculo de Soportes Compuestos ...................................................................................................................................... 35
3. 1 Introducción ................................................................................................................................................................... 35
3. 2 Tipos y Aplicaciones................................................................................................................................................... 36
3. 2. 1 Aspectos Generales ......................................................................................................................................... 36
3. 2. 2 Pilares Compuestos Empresillados ........................................................................................................ 37
3. 2. 3 Pilares Compuestos Triangulados ........................................................................................................... 37
3. 3 Comprobación según el Eurocódigo3 e Instrucción EAE........................................................................ 39
3. 4 Teoría ................................................................................................................................................................................. 45
v
3. 4. 1 Introducción ....................................................................................................................................................... 45
3. 4. 2 Método de Cálculo propuesto .................................................................................................................... 45
3. 4. 3 Influencia de Imperfecciones ..................................................................................................................... 47
4. Análisis de Estabilidad con ANSYS .................................................................................................................................. 51
4. 1 Introducción .................................................................................................................................................................. 51
4. 2 Aspectos Generales del MEF ................................................................................................................................. 51
4. 3 No Linealidad en Mecánica de Sólidos y Estructuras .............................................................................. 54
4. 4 Esquemas de resolución No Lineal : Newton-Raphson .......................................................................... 56
4. 5 ANSYS ............................................................................................................................................................................... 58
4. 5. 1 Análisis de Pandeo. Análisis Lineal vs. No Lineal ........................................................................... 58
4. 5. 2 Aspectos Fundamentales del Análisis No Lineal............................................................................. 60
4. 5. 3 Familias de Elementos Utilizados ........................................................................................................... 61
5. Casos a Estudiar ........................................................................................................................................................................ 64
5. 1 Introducción .................................................................................................................................................................. 64
5. 2 Ejemplo 1 : Soporte Compuesto Enlazado en Celosía (Problema 2D) ............................................ 64
5.2. 1 Descripción del modelo y parámetros .................................................................................................. 66
5.2. 2 Esquemas de Resolución .............................................................................................................................. 69
5.2. 3 Análisis de Resultados ................................................................................................................................... 75
5. 3 Ejemplo 2 : Soporte Compuesto Enlazado en Celosía (Problema 3D) .......................................... 101
5.3. 1 Descripción del modelo y parámetros ................................................................................................ 102
5.3. 2 Esquemas de Resolución ............................................................................................................................ 103
5.3. 3 Análisis de Resultados ................................................................................................................................. 109
6. Resumen , Conclusiones y Trabajos Futuros ........................................................................................................... 123
6.1 Resumen ........................................................................................................................................................................ 123
6. 2 Conclusiones ............................................................................................................................................................... 124
6. 3 Trabajos Futuros....................................................................................................................................................... 125
7. Bibliografía ................................................................................................................................................................................ 126
ANEXOS ............................................................................................................................................................................................ 127
ANEXO I : Ficheros de comandos para ANSYS.................................................................................................... 128

vii
Índice de Figuras
2. 1 Pandeo de la columna perfectamente recta. ........................................................................................................... 14
2. 2. Diferentes situaciones de equilibrio. ....................................................................................................................................................... 16
2. 3 Representación de cargas y momentos en la columna .............................................................................................................. 16
2. 4 Comportamiento de la columna de Euler ............................................................................................................................................. 18
2. 5 Imperfecciones en la columna real............................................................................................................................................................. 19
2. 6 Representación de cargas y momentos en la columna inicialmente indeformada ............................................ 20
2. 7 Evolución de la deformación en la columna ....................................................................................................................................... 23
2. 8 Desplazamiento de arco doblemente apoyado (a) Esquema de análisis. (b) curva esfuerzo
desplazamiento .................................................................................................................................................................................................................... 25
2. 9 Rigidez en la sección............................................................................................................................................................................................... 25
2. 10 Gráfica tensión deformación lineal ......................................................................................................................................................... 26
2. 11 Tensión-deformación del material plástico perfectamente elástico ........................................................................... 26
2. 12 Tensión-deformación no lineal .................................................................................................................................................................. 26
2. 13 Curvas real y teórica de pandeo ................................................................................................................................................................ 27
2. 14 Deformación y tensiones en la sección ................................................................................................................................................ 29
2. 15 Distribución de tensiones en la sección .............................................................................................................................................. 30
2. 16 Curva tensión-deformación propia del material ......................................................................................................................... 32
2. 17 Teoría del Módulo Tangente ........................................................................................................................................................................ 33
3. 1 Pilar triangulado y pilar empresillado..................................................................................................................................................... 35
3. 2 Soporte empresillado, (a) cordones con perfiles en U y (b) cordones con perfiles en I ................................. 37
3. 3 Diferentes configuraciones del soporte compuesto triangulado ...................................................................................... 38
3. 4 Valores de Sv según la configuración de los enlaces.................................................................................................................... 41
3. 5 Diferentes longitudes de pandeo ................................................................................................................................................................. 43
3. 6 Tabla 35.1.2.a Valores del coeficiente de imperfección ........................................................................................................... 43
3. 7 Gráfica 35.1.2 Curvas de pandeo .................................................................................................................................................................. 43
3. 8 Tabla 35.1.2.b Elección de las curvas de pandeo ............................................................................................................................ 44
3. 9 (a) típico soporte compuesto y (b) la sección del soporte ...................................................................................................... 48
3. 10 (a) modo de pandeo global y (b) modo de pandeo local de un soporte compuesto simplemente
apoyado....................................................................................................................................................................................................................................... 49
viii
3. 11 deformadas características de soportes compuestos con diferentes esbelteces e imperfecciones.
(a) columna con imperfección global, (b) misma columna con imperfección global y local, (c) columna
de mayor esbeltez con sólo imperfección global y (d) misma columna con imperfección global y loca...........
............................................................................................................................................................................................................................................................ 50
4. 1 Ejemplo de sistema a analizar ........................................................................................................................................................................ 52
4. 2 Discretización del dominio ............................................................................................................................................................................... 52
4. 3 Solución del método de Newton-Raphson para la siguiente iteración......................................................................... 57
4. 4 Procedimiento incremental de Newton-Raphson ......................................................................................................................... 57
4. 5 (a) Análisis No Lineal y (b) Análisis Lineal del mismo problema ..................................................................................... 59
4. 6 Método de Newton-Raphson frente al Arc. Length Method .................................................................................................. 60
4. 7 Elemento BEAM188 ............................................................................................................................................................................................... 62
4. 8 Elemento LINK1......................................................................................................................................................................................................... 63
5. 1 Detalles de los enlaces y sección del soporte compuesto 2D ............................................................................................... 65
5. 2 Gráficas comparativas para los distintos valores de x haciendo uso de BEAM188 ........................................... 75
5. 3 Gráficas comparativas para los distintos valores de x haciendo uso de LINK1 .................................................... 76
5. 4 Gráfica comparativa para el caso 1 ............................................................................................................................................................ 77
5. 5 Primer modo de pandeo (a) columna deformada y (b) columna deformada e indeformada ................... 78
5. 6 Segundo modo de pandeo (a) columna deformada y (b) columna deformada e indeformada ............... 79
5. 7 Tercer modo de pandeo (a) columna deformada y (b) columna deformada e indeformada. ................... 79
5. 8 Gráfica comparativa para el caso 2. ........................................................................................................................................................... 80
5. 9 Primer modo de pandeo (a) columna deformada y (b) columna deformada e indeformada. .................. 81
5. 10 Segundo modo de pandeo (a) columna deformada, (b) columna deformada e indeformada y (c)
sección de la columna deformada con eje indeformado. ................................................................................................................... 82
5. 11 Tercer modo de pandeo (a) columna deformada, (b) columna deformada e indeformada y (c)
sección de la columna deformada con eje indeformado .................................................................................................................... 82
5. 12 Gráfica comparativa para el caso 3 ......................................................................................................................................................... 83
5. 13 Primer modo de pandeo (a) columna deformada y (b) columna deformada e indeformada................ 84
5. 14 Segundo modo de pandeo (a) columna deformada, (b) columna deformada e indeformada y (c)
sección de la columna deformada con eje indeformado .................................................................................................................... 85
5. 15 Tercer modo de pandeo (a) columna deformada, (b) columna deformada e indeformada y (c)
sección de la columna deformada con eje indeformado .................................................................................................................... 85
5. 16 Gráfica comparativa para el caso 4 ......................................................................................................................................................... 86
5. 17 Primer modo de pandeo (a) columna deformada y (b) columna deformada e indeformada................ 87
5. 18 Segundo modo de pandeo (a) columna deformada, (b) columna deformada e indeformada y (c)
sección de la columna deformada con eje indeformado .................................................................................................................... 87
5. 19 Tercer modo de pandeo (a) columna deformada, (b) columna deformada e indeformada y (c)
sección de la columna deformada con eje indeformado .................................................................................................................... 87

viiii
5. 20 Gráfica comparativa para el caso 5 ......................................................................................................................................................... 89
5. 21 Primer modo de pandeo (a) columna deformada, (b) columna deformada e indeformada y (c)
sección de la columna deformada con eje indeformado .................................................................................................................... 90
5. 22 Segundo modo de pandeo (a) columna deformada, (b) columna deformada e indeformada y (c)
sección de la columna deformada con eje indeformado .................................................................................................................... 91
5. 23 Tercer modo de pandeo (a) columna deformada, (b) columna deformada e indeformada y (c)
sección de la columna deformada con eje indeformado .................................................................................................................... 92
5. 24 Gráficas comparativas (a) mallado de los enlaces mediante elementos BEAM188 y (b) mallado de
los enlaces mediante elementos LINK1............................................................................................................................................... 96-100
5. 25 Sección BB’ del soporte 3D ......................................................................................................................................................................... 101
5. 26 Representación del soporte 3D............................................................................................................................................................... 102
5. 27 Gráficas comparativas del Ejemplo 2, Problema 3D.............................................................................................................. 110
5. 28 Gráfica comparativa del caso 1................................................................................................................................................................ 111
5. 29 Primer modo de pandeo (a) columna deformada y (b) columna deformada e indeformada............ ..........
........................................................................................................................................................................................................................................................ 112
5. 30 Segundo modo de pandeo (a) columna deformada y (b) columna deformada e indeformada....... ...........
......................................................................................................................................................................................................................................................... 113
5. 31 Tercer modo de pandeo . Pandeo de los enlaces, los cordones permanecen en la vertical. .............. ...........
......................................................................................................................................................................................................................................................... 113
5. 32 Noveno modo de pandeo (a) columna deformada y (b) columna deformada e indeformada ..........
......................................................................................................................................................................................................................................................... 114
5. 33 Gráfica comparativa del caso 2................................................................................................................................................................ 115
5. 34 Primer modo de pandeo (a) columna deformada y (b) columna deformada e indeformada............. 116
5. 35 Tercer modo de pandeo . Pandeo de los enlaces, los cordones permanecen en la vertical ................. 117
5. 36 Sexto modo de pandeo (a) columna deformada y (b) columna deformada e indeformada ................ 117
5. 37 Séptimo modo de pandeo (a) columna deformada y (b) columna deformada e indeformada.......... 118
5. 38 Décimo modo de pandeo (a) columna deformada, (b) columna deformada e indeformada y (c)
sección de la columna deformada con eje indeformado ................................................................................................................. 118
5. 39 Gráfica comparativa para el caso 3 ...................................................................................................................................................... 119
5. 40 Primer modo de pandeo (a) columna deformada y (b) columna deformada e indeformada............ ..........
........................................................................................................................................................................................................................................................ 120
5. 41 Segundo modo de pandeo . Pandeo de los enlaces, los cordones permanecen en la vertical. .......... ..........
......................................................................................................................................................................................................................................................... 121
5. 42 Sexto modo de pandeo (a) columna deformada y (b) columna deformada e indeformada ................ 121
5. 43 Séptimo modo de pandeo (a) columna deformada y (b) columna deformada e indeformada.......... 122
5. 44 Octavo modo de pandeo (a) columna deformada, (b) columna deformada e indeformada y (c)
sección de la columna deformada con eje indeformado ................................................................................................................. 127

ixi

11
1. Introducción
En este proyecto se estudian de manera teórica y numérica las cargas de colapso en los
soportes compuestos metálicos. Sabiendo que dicho colapso viene, en la mayor parte de las veces
provocado por una pérdida de estabilidad ligada al pandeo, estudiaremos dicho fenómeno haciendo
uso de diferentes herramientas. Haremos estudios tanto numéricos, empleando el Método de los
Elementos Finitos con ANSYS, como teóricos y normativos. Dicho estudio viene promovido por la
motivación que a continuación se presenta.
1. 1 MOTIVACIÓN
Movidos por el hecho de que la Instrucción de Acero Estructural contempla actualmente,
debido al avance en las herramientas numéricas, la posibilidad de analizar la estabilidad de
estructuras traslacionales realizando un análisis en 1er orden con imperfecciones globales y locales,
ó el análisis de las mismas mediante un análisis en 2° orden, se llevará a cabo el análisis de
estabilidad global y local de estructuras traslacionales haciendo uso del Método de los Elementos
Finitos (MEF) evitando tener que realizar el análisis en 1er orden en el que se deben tener en cuenta
las longitudes de pandeo traslacionales.
Por lo tanto, la motivación de este proyecto es hacer uso de las facilidades y simplificaciones en
la comprobación de estabilidad de estructuras traslaciones que la EAE nos permite en el artículo 24
[7], en el que se establece que los análisis elásticos en segundo orden, bajo la acción de cargas
exterarnas y las imperfecciones geométricas equivalentes, son aplicables a cualquier tipo de
estructura traslacional.
Con el fin de ahondar en el estudio de las cargas de colapso, considerando efectos de 1er y 2°
orden se resuelven dos problemas simplificando las comprobaciones de estabilidad como propone
la EAE. De estos dos problemas se obtendrán las cargas de colapso numéricas mediante análisis de
pandeo lineal y no lineal aplicando el MEF. Así mismo, se resolverán estos mismos dos problemas
haciendo uso de esquemas de resolución teóricos [5] y normativos [7].
12
1. 2 OBJETIVOS GENERALES
Tal y como podemos entender según el título de este documento “Estudio de las cargas de
colapso en soportes compuestos mediante análisis con elementos finitos y comparativa con
resultados teóricos”, el desarrollo de este proyecto estará centrado principalmente en el análisis del
fenómeno de inestabilidad al que con mayor frecuencia deben hacer frente las estructuras
metálicas de las características como las que definiremos. Centraremos nuestra atención en el
estudio de situaciones en las que las cargas actuantes combinadas con las características
estructurales y las condiciones de contorno de la misma, impiden a la estructura cumplir con los
objetivos definidos.
Durante el desarrollo de este proyecto, haremos uso de las diferentes herramientas teóricas y
numéricas para el estudio del fenómeno de inestabilidad que más comúnmente suele causar el
colapso en estas estructuras, siendo éste el pandeo por flexión. De esta manera se estudiará el
margen de seguridad con el que trabajamos al diseñar soportes compuestos metálicos. Para ello,
compararemos los resultados obtenidos teóricamente con los que hayamos obtenido mediante
métodos numéricos y también normativos (EAE).
Para lograr los objetivos descritos calcularemos las cargas de colapso mediante un
planteamiento:
i. Teórico [5] : se desarrollará en detalle el modelo teórico y matemático que define el
problema de forma genérica para después obtener las ecuaciones específicas del modelo
estudiado. Se resolverá el problema atendiendo a la teoría clásica, siendo ésta la que
propone el artículo [5] después de haber realizado una investigación numérica y analítica
basada en el estudio del comportamiento de soportes compuestos.
ii. Normativo [7]: se describirán las expresiones matemáticas, tablas y gráficas empleadas
por la normativa de aplicación vigente en Europa (Eurocódigo 3) para la comprobación del
cumplimiento de las reglas y principios para el cálculo de estructuras de acero.
iii. Numérico : apartado fundamental de este proyecto, que consiste en el modelado y
resolución de los problemas propuestos mediante la utilización del software comercial
ANSYS, basado en el cálculo numérico mediante el Método de los Elementos Finitos (MEF).

13
1. 3 ESTRUCTURA Y CONTENIDO DEL PROYECTO
Los estudios y análisis realizados en este proyecto, así como los resultados obtenidos se presentan en este documento organizados de la siguiente forma:
Capítulo I : Introducción
Es un breve capítulo introductorio se pretende establecer los objetivos del proyecto, así como realizar un recorrido por la estructura y contenido del proyecto. También se recoge en este capítulo la motivación del proyecto.
Capítulo II : Análisis de Estabilidad Lineal y No Lineal
Este será el capítulo más denso del proyecto, ya que se compone de las teorías y demostraciones que sustentan el cálculo y análisis de los elementos sometidos a compresión. Se desarrollan los aspectos teóricos relativos al fenómeno de inestabilidad estructural analizado, es decir, el pandeo. Se pretende con esto justificar el procedimiento seguido en el desarrollo del proyecto.
Capítulo III : Cálculo de Soportes Compuestos
En este capítulo se presentará con mayor detalle la tipología de la estructura a analizar. También se pretende en este capítulo hacer un breve recorrido por los dos métodos teóricos y normativos que emplearemos para la resolución del problema, siendo estos el propuesto por la teoría y el EUROCÓDIGO 3 (EAE) respectivamente.
Capítulo IV : Análisis de Estabilidad con ANSYS
Una vez introducidos los aspectos fundamentales para la compresión y resolución del caso de interés a lo largo de los capítulos anteriores, se presenta en este capítulo el método utilizado para la resolución numérica del mismo problema.
Con este fin se sentarán las bases del MEF desde un punto de vista orientado a los problemas estructurales, y a continuación se realizará una breve introducción al programa de elementos finitos ya mencionado, ANSYS.
Capítulo V : Casos a Estudiar
Al alcanzar este capítulo ya contaremos con todas las herramientas necesarias para abordar el problema planteado. Por ello será en este capítulo en el que se presenten también los datos de los problemas a resolver, así como los resultados de ambos ejemplos.
Capítulo VI:. Resumen, Conclusiones y Trabajos Futuros
Será en este Capítulo en el que después de resumir el procedimiento seguido y el trabajo realizado se destaquen las conclusiones. Derivadas de estas conclusiones se presentan también las posibles aplicaciones futuras de este proyecto.
Capítulo VII :Bibliografía
Capítulo en el que se recogerán las fuentes de información consultadas.
ANEXOS
Se adjuntaránn aquí los códigos ANSYS utilizados para la resolución mediante MEF de los problemas
planteados.

14
2. Pandeo de Columnas o Soportes
2.1 BREVE INTRODUCCIÓN AL PANDEO
Comenzaremos definiendo el fenómeno de inestabilidad que se pretende estudiar mediante el
desarrollo de este proyecto, siendo éste el fenómeno de PANDEO.
Una definición sencilla del mismo podría ser la siguiente ; el pandeo es un fenómeno de
inestabilidad elástica que puede darse en elementos comprimidos esbeltos, y que se manifiesta por
la aparición de desplazamientos importantes transversales a la dirección principal de compresión.
En ingeniería estructural, este fenómeno aparece principalmente en pilares y columnas, y se
traduce en la aparición de una flexión adicional en el pilar cuando se halla sometido a la acción de
esfuerzos axiles de cierta importancia.
Figura 2. 1 : Pandeo de la columna perfectamente recta.
La aparición de la deformación por pandeo limita severamente la resistencia a compresión en
pilares, o como es nuestro caso en soportes compuestos, o cualquier tipo de pieza esbelta.
Eventualmente, a partir de cierto valor de la carga axil de compresión, sea ésta la conocida como
carga critica de pandeo, puede producirse una situación de inestabilidad elástica y entonces,
fácilmente la deformación aumentará produciendo tensiones adicionales que superarán la tensión
de rotura, lo cual puede provocar el colapso del elemento estructural. Además del pandeo flexional
ordinario, el cual será el único contemplado en los estudios elaborados en este proyecto, existen

15
otros tipos de pandeo como el torsional, siendo éste la inestabilidad elástica provocada por un
momento torsor excesivo.
Los pilares, o soportes compuestos, comprimidos pueden presentar diversos modos de fallo en
función de su esbeltez mecánica.
Los pilares de gran esbeltez suelen fallar por pandeo elástico y son sensibles tanto al
pandeo global de la estructura, como al local, en la que resultan dañados por dicho efecto
incluso los componentes de la estructura.
Los pilares de esbeltez media tienen una resistencia al pandeo muy influenciada por las
imperfecciones constructivas, podrían ser estas geométricas o incluso heterogeneidad
material. Estas imperfecciones llegan a causar incluso el pandeo anaelástico.
Los pilares de muy baja esbeltez, fallan por exceso de compresión, es decir, antes de que
los efectos de pandeo resulten importantes el pilar ha perdido su capaz portante por
efectos de una compresión excesiva.
Para una mejor compresión del primero de los efectos, definamos ahora la diferencia entre el
pandeo global y el local. El pandeo GLOBAL es aquel en el que la estructura completa, formada por
barras u otros elementos enlazados, pueden aparecer modos de deformación en los que los
desplazamientos no sean proporcionales a las cargas, es decir, la estructura puede pandear
globalmente sin que ninguno de sus componentes alcance su propia carga de pandeo. Debido a este
factor, como bien se podrá apreciar más adelante en este mismo proyecto, la carga crítica GLOBAL
en muchas estructuras siempre dependiendo de las características geométricas, más
concretamente de la esbeltez de la misma. Cuando la esbeltez aumenta crece la posibilidad de que
la carga de pandeo global supere a la local. El Pandeo LOCAL, puede ser definido como el fenómeno
que aparece en piezas o elementos aislados, o que estructuralmente podrían considerarse aislados
y que a su vez forman parte de una estructura.
Los casos realistas que estudiaremos en el proyecto y que después compararemos con valores
teóricos son aquellos que contemplan la posibilidad de que la columna, o soporte compuesto en
nuestro caso, presente una imperfección inicial. Así como, la posible imperfección material, esto
quiere decir que el material no sea perfectamente elástico y pueda producirse la plastificación del
mismo.
2. 2 RECORRIDO POR LA TEORÍA DE EULER
Debido a la complejidad del problema de pandeo empezaremos con el estudio de la teoría más
sencilla aplicada al caso más simple, sea ésta el estudio de pandeo de la columna de Euler. Para el
estudio de dicho caso Euler hacen ciertas suposiciones que serán clave para la simplificación del
problema, siendo éstas las resumidas a continuación [3]:
1. Se trata de un elemento simplemente apoyado. El apoyo inferior es articulado-
empotrado mientras que el superior, está simplemente apoyado. Los apoyos siempre han de
impedir todo desplazamiento HORIZONTAL .

16
2. El elemento es perfectamente recto estando la carga aplicada está en perfecta
alineación con su eje longitudinal.
3. El comportamiento del material sigue la Ley de Hooke.
4. Las deformaciones del elemento son lo suficientemente pequeñas como para poder
considerar el término despreciable frente a la unidad, siendo ambas comparadas en la
expresión de la curvatura , luego la curvatura puede ser aproximada según .
Figura 2. 2. : Diferentes situaciones de equilibrio.
Las diversas situaciones de equilibrio representadas en la figura 3. 7. Son las correspondientes
a el equilibrio estable, el equilibrio inestable y el equilibrio indiferente o neutro, respectivamente.
Figura 2. 3. : Representación de cargas y momentos en la columna.
De acuerdo con el criterio que define el equilibrio neutro, la carga critica es aquella para la que según la configuración combada del elemento en la figura 3. 8. éste es posible. Si tomamos los ejes coordenados como se muestra en la misma figura, el momento interno de resistencia en cualquier

17
sección, a una distancia x del origen, es
Igualando esta expresión a la del momento creado por la fuerza externa aplicada, , obtenemos
Como podemos observar se trata de una ecuación diferencial lineal de segundo orden y además
con coeficientes constantes, lo que hace que hallar una solución para ésta no sea tarea complicada.
Sí lo sería en caso de no haber tenido en cuenta las hipótesis simplificativas del problema, ya que la
ecuación resultante sería una ecuación diferencial de segundo orden no lineal y además sus
coeficientes no serían constantes.
Reescribiendo la ecuación (2.2. 2) como,
siendo
Obtenemos la solución característica de la ecuación diferencial lineal homogénea, y
por tanto la solución general a la ecuación (2.1. 3) ,
Para hallar el valor de las constantes arbitrarias A y B haremos uso de las condiciones de
contorno:
en
en
Al sustituir dichas condiciones de contorno, una de las soluciones resultantes y que es de
nuestro interés es ó En el primer caso obtendríamos una solución trivial en la
que la constante no puede tener ningún valor y eso conlleva que tampoco lo tendría Esta
solución no aporta información alguna, solo confirma lo que ya sabíamos, sea esto, que la columna
permanece en equilibrio ante cualquier carga axial siempre que el elemento permanezca
perfectamente indeformado . Si donde sustituyendo esta expresión en las
ecuaciones (2.1. 4) y en la resultante de imponer la primera condición de contorno , obtenemos
Las cargas cuyos valores vengan dados por la expresión (2.2. 5.) permiten que la columna
permanezca en estado de equilibrio con una configuración de pequeña curvatura. La forma de dicha
(2.2. 1)
(2.2. 2)
2 (2.2. 3) 2 (2.2. 4)
(2.2. 5)
(2.2. 6)

18
deformada viene dada por la ecuación (2.2. 6), pero es una expresión de amplitud indeterminada,
ya que A puede tener cualquier valor si
El valor de la carga cuando la variable tiene valor 1 es
Siendo ésta la conocida como carga de Euler. Se define como la carga mínima para la cual es
posible alcanzar un estado de equilibrio neutro. Por consiguiente, es también el mínimo valor para
el que la columna abandona el estado de equilibrio.
La representación gráfica del comportamiento de la columna de Euler puede ser asumida según
se representa en la figura 2. 4. Hasta alcanzar la carga de Euler la columna debe permanecer
indeformada, pero una vez alcanzado el valor de P conocido como la carga de Euler, existe una
bifurcación del equilibrio, es decir, la columna puede permanecer recta o puede adoptar una
configuración deformada de amplitud indeterminada.
Esto quiere decir que existe un estado de equilibrio neutro en P, es decir, que la carga de Euler
marca el punto de transición entre el equilibrio estable e inestable.
La ecuación (2.2. 5) indica que para valores superiores a 1 podrían existir otras cargas para las
cuales sería posible alcanzar un estado de equilibrio indiferente. Estos valores no son de interés ya
que no son significativos desde el punto de vista físico para este estudio.
La carga de Euler obtenida durante el desarrollo anterior, ha sido nombrada en algunas
ocasiones como carga crítica y en otras como carga crítica de pandeo. Es por eso por lo que fue
propuesto por otros científicos, como Hoff, marcar una clara diferencia entre ambas nomenclaturas
ya que hacen referencia a dos cargas de significados muy distintos. El científico alega que la carga
aquella para la cual la columna imperfecta se comba lateralmente de manera inesperada es la que
debería ser llamada Carga de Pandeo. Reservando por tanto, Carga Crítica como nomenclatura para
Figura 2. 4. : Comportamiento de la columna de Euler.
(2.2. 7)

19
la carga según la cual un equilibrio neutro es posible en columnas perfectas cargadas axialmente,
según un análisis lineal.
2. 3 COMPORTAMIENTO DE COLUMNAS IMPERFECTAS
CON DEFORMACIÓN INICIAL
Como se ha podido apreciar en el epígrafe anterior, la teoría de Euler sólo contempla la
columna perfecta, es decir, descarta la posibilidad de que la columna a estudiar pueda presentar
ciertas imperfecciones antes de ser sometida a esfuerzo alguno. Al igual que, considera que la carga
aplicada está perfectamente alineada con el eje de la columna, lo cual quiere decir que no existe
excentricidad de la carga alguna para ninguna sección. Como se ha mencionado anteriormente,
estas suposiciones no tienen otro fin más que el de simplificar la resolución del problema, pero no
debemos olvidar que los miembros perfectos no existen ni si quiera en la ingeniería actual.
Para ser realistas deberíamos considerar tanto todos aquellos factores que han sido ignorados
por Euler y que podrían aparecer en el problema real.
Imperfección inicial de la columna. La directriz de la columna nunca será perfectamente
recta.
La carga podría ser aplicada con cierta excentricidad. Es inevitable una cierta desviación
sobre la directriz, en la aplicación de la carga sobre la columna.
El material de la pieza no tiene un comportamiento indefinidamente lineal y elástico,
eso quiere decir que no es indiferente el nivel de cargas y deformaciones a las que
estará sometida.
Los procesos de fabricación y manipulación de las piezas y los efectos de las condiciones
ambientales (gradiente de temperatura, por ejemplo), generan inevitables tensiones
residuales que se autoequilibran pero que afectan al comportamiento real de la pieza.
Figura 2. 5. : Imperfecciones en la columna real.
En este proyecto se considerará la existencia de imperfección geométrica, será éste el caso que
resolveremos para comparar con la teoría clásica y con los métodos empleados en la actualidad
para el diseño de soportes compuestos.
20
Muchos describen la metodología de resolución ideal, como el estudio del comportamiento de la
columna imperfecta y posterior comparación con el comportamiento predicho para la misma según
la teoría de Euler.
Comencemos por definir la columna con deformación inicial que será objeto de nuestro estudio.
En el proyecto que nos ocupa, la deformación inicial de la columna es entendida como una
desviación en el eje central de la estructura. El eje principal del soporte presenta una curvatura
inicial. Dicha curvatura no es más que un desplazamiento transversal, el cual como bien podremos
apreciar en los epígrafes posteriores, en los que se recogen los modelos numéricos del problema.
Aunque trabajemos con un problema menos idealista que el estudiando por Euler, seguimos
manteniendo algunas de sus hipótesis. Podemos decir que excepto la idea de que el elemento
estudiado es perfectamente recto, mantenemos las demás hipótesis euleristicas, es decir, el
material se comporta según la ley de Hooke y, también asumiremos que las deformaciones son
pequeñas.
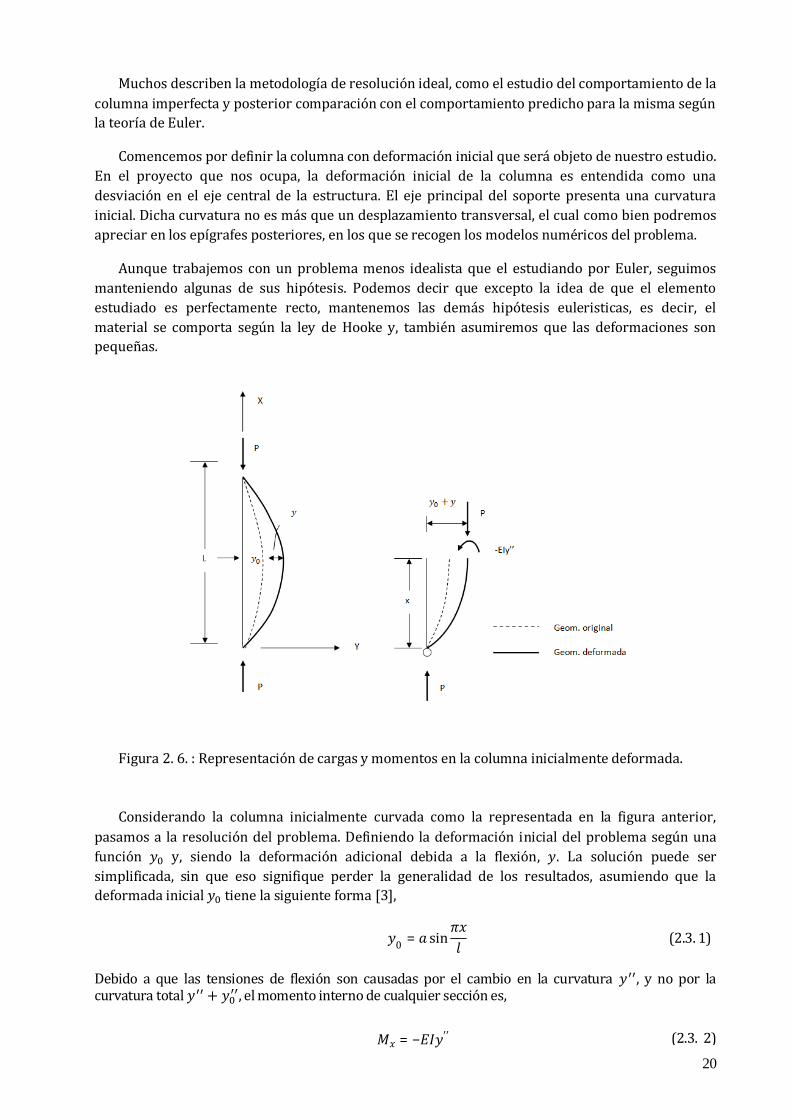
Figura 2. 6. : Representación de cargas y momentos en la columna inicialmente deformada.
Considerando la columna inicialmente curvada como la representada en la figura anterior,
pasamos a la resolución del problema. Definiendo la deformación inicial del problema según una
función y, siendo la deformación adicional debida a la flexión, . La solución puede ser
simplificada, sin que eso signifique perder la generalidad de los resultados, asumiendo que la
deformada inicial tiene la siguiente forma [3],
Debido a que las tensiones de flexión son causadas por el cambio en la curvatura , y no por la curvatura total
, el momento interno de cualquier sección es,
sin
(2.3. 1)
(2.3. 2)

21
Con procedimiento equivalente al anterior, pasamos a igualar el momento interno con el
aplicado externamente ,
Introduciendo en la ecuación anterior la definición de y haciendo uso del parámetro ,
obtenemos la siguiente igualdad,
cuya solución ya conocemos, ya que se trata de una ecuación de segundo orden compuesta por
una solución de la ecuacion homogénea y particular, habiendo resuelto en líneas anteriores la
homogénea.
Sustituyendo la solución de la ecuación particular en la expresión a resolver, llegamos a la
siguiente expresión,
A partir de la cual obtendremos los valores de la expresión de la deformada de nuestro soporte,
sabiendo que el valor de la constante C es,
Para simplificar la expresión de la constante C, introduciremos el valor,
Siendo el valor de la carga definido como carga crítica de Euler, anteriormente definida en
este proyecto , la expresión para la constante puede ser reescrita:
Esto quiere decir que nuestra solución toma la forma siguiente
Evaluando dicha ecuación en las condiciones de contorno obtendremos los valores de las
constantes A y B. Sean las condiciones de contorno y las soluciones
en
en
(2.3. 3)
2 2
(2.3. 4)
(2.3. 5)

22
Esto quiere decir, que al igual que sucedía antes, el valor de la constante o el del debe
ser 0 pero si tomamos el valor de , volvemos a estar limitando el valor de a una única
solución posible , siendo ésta la . No siendo de interés alguno esto para nuestro
estudio, tomaremos pues como solución .
Si sustituimos ahora los dos valores de las constantes iguales a 0, la ecuación (3.1. 5) nos
lleva a la deformación por flexión de nuestra columna, o soporte.
Recordemos que la deformación total es la suma de la deformación inicial y la provocada por la
flexión. Luego para obtener la deformación total debemos hacer,
La deformación total medida en un punto situado a la mitad de la altura de la columna,
Será este mismo factor de amplificación el que usa la EAE para tener en cuenta la desviación de la carga aplicada, causante del momento flector que sufre la seccion comprimida. En dicha normativa lo encontraremos de la forma siguiente,
Volviendo a la teoría que estamos desarrollando, destacar que este parámetro será de gran
importancia para la representación de la evolución de la deformación de la columna según la
relación (Siendo )
Basándonos en los resultados representados gráficamente podemos resumir el
comportamiento de la columna imperfecta. Podemos observar como al contrario que la columna
perfecta considerada en la teoría de Euler, la cual se mantiene perfectamente derecha hasta
alcanzar la carga de Euler:
La columna imperfecta comienza a deformar tan pronto le ha sido aplicada la carga.
La deformación evoluciona lentamente, creciendo más rápidamente cuanto mayor es la
relación , es decir, cuanto más cercana es la carga aplicada a la carga de Euler.
La deformación será tanto más grande cuanto mayor sea la deformación inicial de la
columna.
sin
sin
(2.3. 6)
(2.3. 7)

23
La capacidad portante de la columna imperfecta es menor que la carga de Euler, sin
importar cuánto de grande o pequeña sea la imperfección inicial. Cuando la
imperfección inicial es de grandes magnitudes la columna deforma bajo cargas
considerablemente menores que la de carga de Euler.
Una columna construida trabajando con gran precisión y que por lo tanto es
prácticamente perfectamente recta no sufre deformaciones apreciables hasta que la
carga aplicada es considerablemente cercana a la carga de Euler.
A pesar de no haber discutido anteriormente en este proyecto el mecanismo de fallo de estas
columnas, ya que no ha sido tampoco aun objeto de estudio, se puede adelantar que las grandes
deformaciones producen fuerzas anaelásticas que podrían llegar a causar el colapso de la misma. Se
espera por lo tanto, que las columnas con grandes deformaciones iniciales fallen sometidas a cargas
bastante menores que la carga de Euler, mientras que la columna casi perfecta es capaz de soportar
cargas muy cercanas a dicho valor.
Figura 2. 7. : Evolución de la deformación en la columna.
24
2. 4 DIFERENCIAS ENTRE EL ANÁLISIS LINEAL Y NO LINEAL
En este apartado se tratarán las diferencias entre el análisis lineal y el no lineal, además se
hablará de cuál es el momento óptimo para realizar uno u otro tipo de análisis. Recordemos que
uno de los objetivos de este proyecto es descubrir el margen de seguridad con el que el diseño de
soportes compuestos según modelos teóricos trabaja, comparándolo con los resultados del mismo
diseño de haciendo uso de otro métodos con solución mas aproximada a la real, como el de los
Elementos Finitos utilizado por ANSYS.
El término “rigidez” define la diferencia fundamental entre el análisis lineal y el no lineal. La
rigidez es la propiedad que caracteriza la respuesta de una pieza, o estructura como es nuestro
caso, ante la carga aplicada. Algunos de los factores que afectan a la rigidez son el material, la forma
y el soporte de la estructura o pieza.
Cuando una estructura se deforma bajo una carga, su rigidez cambia debido a la alteración de
los factores mencionados en el párrafo anterior. Si el material alcanza su límite de fallo, es decir, se
ve agotada su resistencia elástica, las propiedades de éste cambiarán.
Por otro lado, si el cambio de rigidez es suficientemente pequeño, es lógico asumir que ni las
propiedades de la forma ni las del material cambiaran durante el proceso de deformación. Sea ésta
suposición el principio fundamental del análisis lineal.
Esto quiere decir que, a través de todo el proceso de deformación el modelo analizado mantuvo
la rigidez que poseía en la forma no deformada antes de la aplicación de la carga.
Independientemente de cuánto se deforme el soporte, si la carga se aplica en un paso o
gradualmente, y sin importar lo altas que sean las tensiones que se desarrollan en respuesta a la
carga, el modelo mantiene la rigidez inicial. Esta suposición simplifica enormemente la formulación
del problema y como consecuencia de ello, también su solución.
Estos principios fundamentales del análisis lineal no podrán ser mantenidos a la hora de la
realización de un análisis no lineal. En el análisis no lineal es fundamental abandonar la idea de
rigidez constante. En su lugar, la rigidez cambia durante el proceso de deformación.
Aunque el proceso de cambio de la rigidez es común a todos los tipos de análisis no lineales, el
origen del comportamiento no lineal puede ser diferente, por eso se hace lógico clasificar los
análisis no lineales basándose en el origen principal de la no linealidad. Como no es posible indicar
una única causa del comportamiento no lineal en muchos problemas, algunos análisis deberían
contar con más de un tipo de no linealidad, esto queda fuera del alcance del proyecto, ya que sólo se
estudiarán los casos de no linealidad geométrica y la no linealidad material.
2. 4. 1 Geometría No Lineal
Como ya se ha comentado, el análisis no lineal es necesario cuando la rigidez de la pieza cambia
bajo sus condiciones de funcionamiento. Si los cambios en la rigidez provienen únicamente de los
cambios de forma, el comportamiento no lineal se define como no linealidad geométrica.
Estos cambios de rigidez provocados por la forma pueden suceder cuando una pieza tiene
grandes deformaciones que son visibles a simple vista. Una regla de la aceptación general sugiere
25
llevar a cabo un análisis de geometría no lineal si las deformaciones son superiores a 1/20 de la
cota más grande de la pieza.
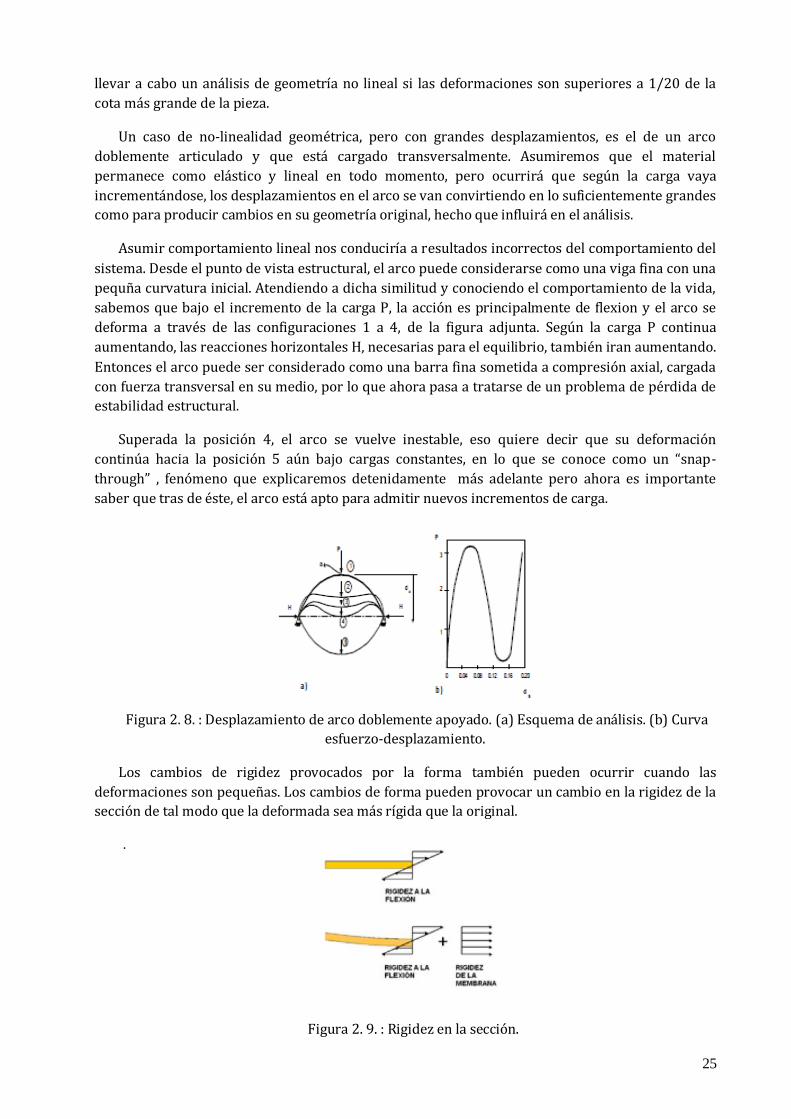
Un caso de no-linealidad geométrica, pero con grandes desplazamientos, es el de un arco
doblemente articulado y que está cargado transversalmente. Asumiremos que el material
permanece como elástico y lineal en todo momento, pero ocurrirá que según la carga vaya
incrementándose, los desplazamientos en el arco se van convirtiendo en lo suficientemente grandes
como para producir cambios en su geometría original, hecho que influirá en el análisis.
Asumir comportamiento lineal nos conduciría a resultados incorrectos del comportamiento del
sistema. Desde el punto de vista estructural, el arco puede considerarse como una viga fina con una
pequña curvatura inicial. Atendiendo a dicha similitud y conociendo el comportamiento de la vida,
sabemos que bajo el incremento de la carga P, la acción es principalmente de flexion y el arco se
deforma a través de las configuraciones 1 a 4, de la figura adjunta. Según la carga P continua
aumentando, las reacciones horizontales H, necesarias para el equilibrio, también iran aumentando.
Entonces el arco puede ser considerado como una barra fina sometida a compresión axial, cargada
con fuerza transversal en su medio, por lo que ahora pasa a tratarse de un problema de pérdida de
estabilidad estructural.
Superada la posición 4, el arco se vuelve inestable, eso quiere decir que su deformación
continúa hacia la posición 5 aún bajo cargas constantes, en lo que se conoce como un “snap-
through” , fenómeno que explicaremos detenidamente más adelante pero ahora es importante
saber que tras de éste, el arco está apto para admitir nuevos incrementos de carga.
Figura 2. 8. : Desplazamiento de arco doblemente apoyado. (a) Esquema de análisis. (b) Curva
esfuerzo-desplazamiento.
Los cambios de rigidez provocados por la forma también pueden ocurrir cuando las
deformaciones son pequeñas. Los cambios de forma pueden provocar un cambio en la rigidez de la
sección de tal modo que la deformada sea más rígida que la original.
.
Figura 2. 9. : Rigidez en la sección.

26
2. 4. 2 No Linealidad Material
Si los cambios de rigidez ocurren únicamente a causa de cambios de las propiedades del
material bajo condiciones operativas, el problema es la no linealidad material. Un modelo de
material lineal implica que la tensión sea proporcional a la deformación unitaria, tal y como se
muestra en la figura 2. 10.
Esto significa que se presupone que cuanto más elevada sea la carga que se aplica, mas altas
serán las tensiones y la deformación, proporcionales a los cambios de la carga. Ante tal situación
también se presupone que no se producirán deformaciones permanentes y que, una vez la carga de
haya retirado, el soporte siempre volverá a su forma original, es decir, no existirá plastificación del
material. Al tratar el análisis de un modelo de material plástico perfectamente elástico, es decir, un
material que ha perdido toda posibilidad de volver a su forma original después de la deformación,
la tensión se mantiene constante por encima de un cierto valor de deformación unitaria.
Este modelo, mostrado en la figura 2. 11. , es uno de los modelos de material no lineal más sencillos, no será el que usaremos en caso de llevar a cabo el análisis de no linealidad material, ya que adoptaremos la propuesta por la EAE [7], representada bajo estas líneas en la figura 2. 12.
Figura 2. 10. : Gráfica tensión-deformación lineal.
Figura 2. 12. : Tensión- deformación no lineal.
Figura 2. 11. : Tensión-deformación del material plástico perfectamente elástico.
Siendo,
27
2. 5 PANDEO EN RÉGIMEN ANAELÁSTICO
Para completar el recorrido por los tipos de análisis no debemos olvidar mencionar el análisis
de la pérdida de estabilidad elástica o pandeo. A veces, las cargas dependiendo de cómo se apliquen
pueden aumentar la rigidez, si son de tensión, o reducirlas, en caso de ser compresivas.
En los casos de cargas de compresión, si los cambios de rigidez son suficientes para hacer que la
rigidez propia de la estructura baje a cero, se produce el pandeo y la estructura sufre una
deformación transversal a la dirección principal de compresión. El fenómeno de pandeo se traduce
en la aparición de una flexión adicional en el elemento comprimido cuando se halla sometido a la
acción de esfuerzos axiales de cierta importancia. Entonces la estructura pierde toda capacidad
portante y se desmorona, o bien, adquiere una nueva rigidez en su estado postpandeo [8].
El pandeo no siempre tiene que equivaler a un fallo catastrófico, es posible que la estructura
pueda soportar cierta carga después de haberse producido el pandeo. Será el análisis líneal el que
explicará el comportamiento postpandeo.
El análisis de pandeo lineal se puede utilizar para calcular la carga bajo la cual una estructura
sufrirá pandeo, es la conocida como carga de Euler. Sin embargo, debemos reconocer que los
resultados del análisis de pandeo lineal no son conservadores. Además, las idealizaciones del
modelo de elementos finitos puede provocar que la carga de pandeo hallada sea muy superior en
dicho modelo a la real. Esto quiere decir, que el resultado del análisis de pandeo lineal debe
utilizarse con cuidado. Es objetivo de este proyecto, determinar el margen y diferencia entre las
cargas determinadas mediante un método u otro.
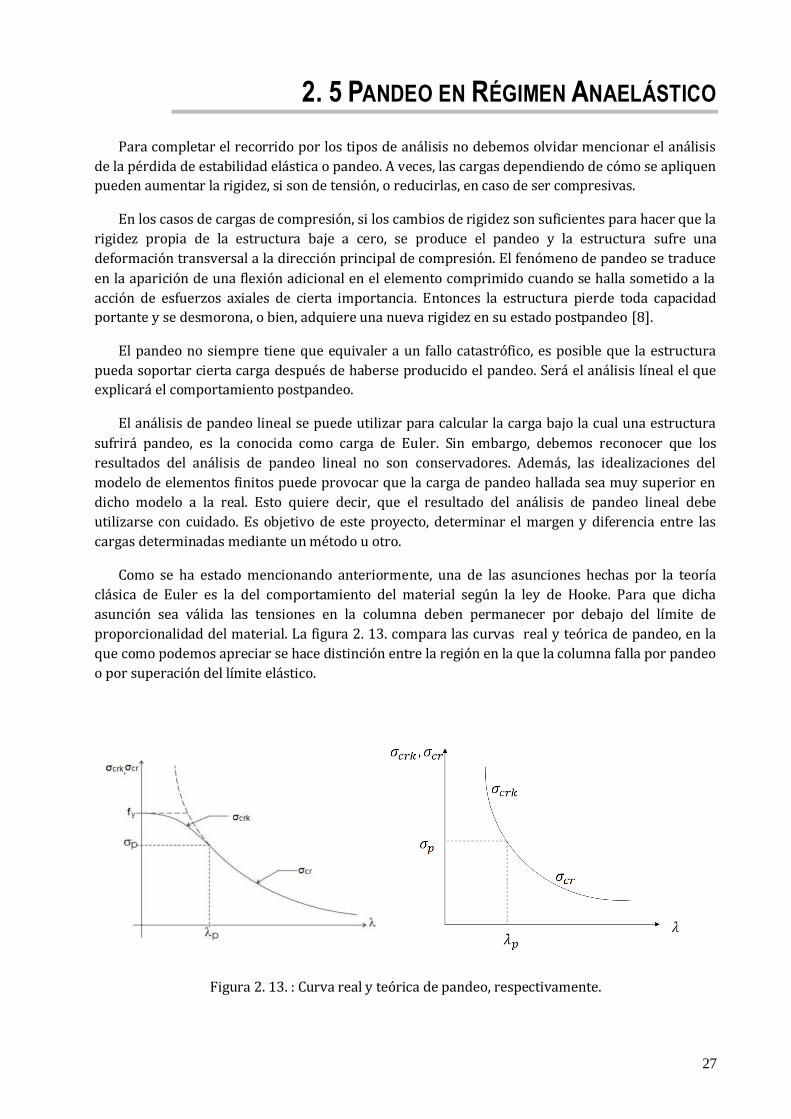
Como se ha estado mencionando anteriormente, una de las asunciones hechas por la teoría
clásica de Euler es la del comportamiento del material según la ley de Hooke. Para que dicha
asunción sea válida las tensiones en la columna deben permanecer por debajo del límite de
proporcionalidad del material. La figura 2. 13. compara las curvas real y teórica de pandeo, en la
que como podemos apreciar se hace distinción entre la región en la que la columna falla por pandeo
o por superación del límite elástico.
Figura 2. 13. : Curva real y teórica de pandeo, respectivamente.

28
El límite de proporcionalidad es el punto definido como,
de donde deducimos que
A partir de éste podemos diferenciar dos regiones en la gráfica, aquella para la que la fórmula
de Euler sería válida ya que el material se rige según la Ley de Hooke , y aquella para la
que perdería validez ya que debería ser contemplado el comportamiento elasto-plástico del
material .
Según los datos del acero del que estarían constituidos los soportes compuestos estudiados en
este proyecto, un acero estructural S235, cuyo límite elástico es fy = 235 MPa y cuyo módulo de
elasticidad es E = 210 GPa, podemos definir el límite de proporcionalidad con los valores,
Esto significa que para aquellos valores en los que deberíamos emplear la teoría
que contempla el pandeo anaelástico.
Pasaremos tras esta breve introducción al comportamiento elasto-plástico del material, al
estudio algo más en profundidad del Pandeo Anaelástico.
Como ya hemos visto, en caso de tener esbelteces menores a no es válida la Teoría de Euler.
Engesser (1889) fue el encargado de estudiar el comportamiento teórico de piezas comprimidas de
acero bajo tensiones superiores al límite de proporcionalidad. Éste partió de hipótesis similares a la
establecidas por Euler para llegar a la deducción de , una de las que no mantuvo fue la
constancia del módulo de elasticidad E. Engesser fue por tanto quién en dos ocasiones diferentes
propone dos hipótesis distintas para su determinación.
a.1. Teoría del Doble Módulo.
a.2. Teoría del Módulo Tangente.
2. 5. 1Teoría del Doble Módulo
Esta teoría permite la obtención de la carga crítica de la columna cuya solicitación axial de
compresión supera su límite de proporcionalidad antes de causar el pandeo. El análisis llevado a
cabo en ésta, conlleva las siguientes asunciones:
1. La columna es perfectamente recta y está cargada en su directriz.
2. Se trata de un elemento biarticulado.
3. Las deformaciones son lo suficientemente pequeñas como para aproximarla mediante
la curva .
4. La relación tensión - deformación es la del ensayo de tracción, se acepta que los
esfuerzos y deformación por flexión siguen la misma ley.
29
5. Las secciones planas antes de la flexión permanecerán planas después de ésta, en
cambio, las deformaciones longitudinales aumentan linealmente con la distancia a la
línea neutra.
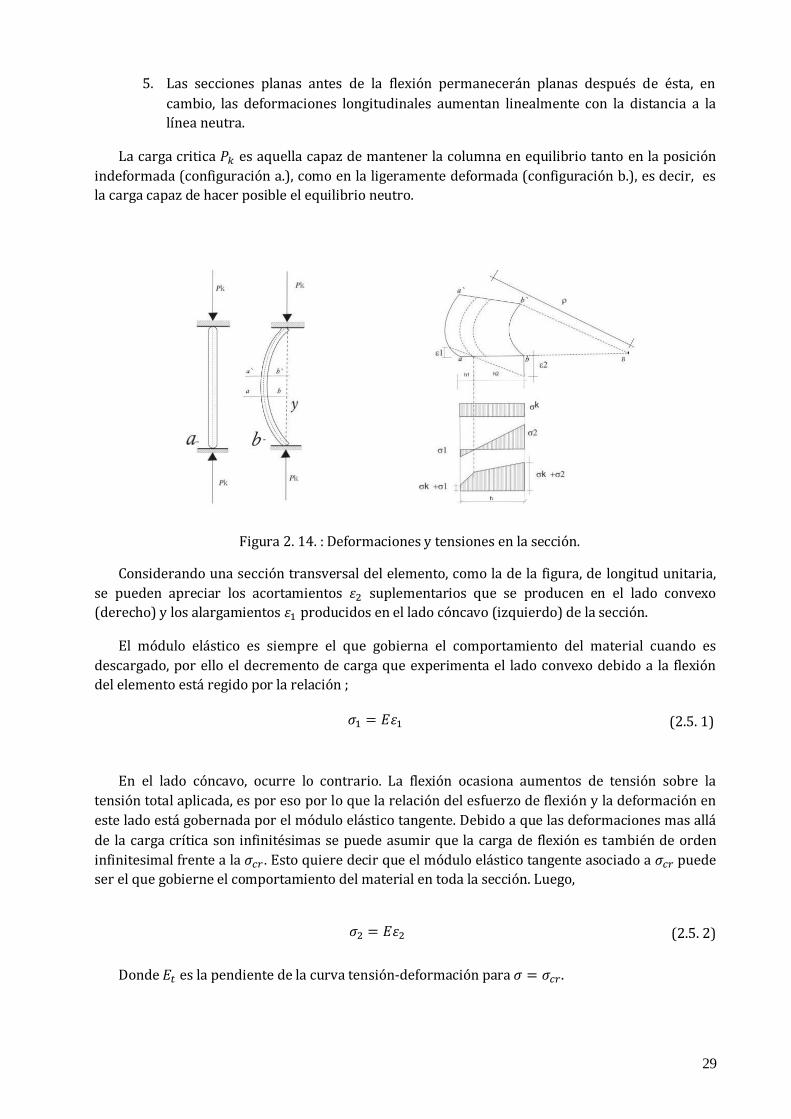
La carga critica es aquella capaz de mantener la columna en equilibrio tanto en la posición
indeformada (configuración a.), como en la ligeramente deformada (configuración b.), es decir, es
la carga capaz de hacer posible el equilibrio neutro.
Figura 2. 14. : Deformaciones y tensiones en la sección.
Considerando una sección transversal del elemento, como la de la figura, de longitud unitaria,
se pueden apreciar los acortamientos suplementarios que se producen en el lado convexo
(derecho) y los alargamientos producidos en el lado cóncavo (izquierdo) de la sección.
El módulo elástico es siempre el que gobierna el comportamiento del material cuando es
descargado, por ello el decremento de carga que experimenta el lado convexo debido a la flexión
del elemento está regido por la relación ;
En el lado cóncavo, ocurre lo contrario. La flexión ocasiona aumentos de tensión sobre la
tensión total aplicada, es por eso por lo que la relación del esfuerzo de flexión y la deformación en
este lado está gobernada por el módulo elástico tangente. Debido a que las deformaciones mas allá
de la carga crítica son infinitésimas se puede asumir que la carga de flexión es también de orden
infinitesimal frente a la . Esto quiere decir que el módulo elástico tangente asociado a puede
ser el que gobierne el comportamiento del material en toda la sección. Luego,
Donde es la pendiente de la curva tensión-deformación para .
(2.5. 1)
(2.5. 2)

30
Como bien podemos apreciar en la figura 2. 15. la curvatura de la sección viene dada por
, eso quiere decir que los esfuerzos de flexión localizados a distancia de la línea
neutra pueden ser definidos,
Figura 2. 15. : Distribución de tensiones en la sección.
Las tensiones y deformaciones son positivas cuando las compresiones y los valores de lo son,
según el sentido definido en la figura anterior. Recordando que la curvatura puede ser aproximada
por la función , las ecuaciones anteriores pasan a ser,
(2.5. 3)
(2.5. 4)
31
Para pasar ahora al estudio del equilibrio entre las cargas exteriores y las tensiones resultantes en cualquier sección, debemos tener en cuenta que hemos considerado la carga axil aplicada constante durante la flexión, por ello las resultantes de tracción y compresión causadas por la flexión deben compensarse.
Sabiendo que , si se desarrollan las ecuaciones de equilibrio queda reflejado que la línea
neutra no coincide con el eje baricéntrico en el caso de flexión anaelástica. La necesidad de que los
esfuerzos de flexión compensen el momento exterior debido a la carga aplicada, , impone una
segunda condición de equilibrio.
Introduciendo la expresión siguiente en las ecuaciones de equilibrio :
Llegamos a la expresión final;
Siendo esta ultima ecuación la ecuación diferencial que gobierna la flexión de una columna
cuando es solicitada en el dominio anaelástico del material. Si la comparamos con la ecuación (2.2.
2), que define dicho efecto pero en el dominio elástico del material, podemos apreciar que son
idénticas salvo por el valor del módulo , que en este caso ha sido sustituido por , módulo
elástico reducido. Observando la ecuación (2.5. 7) podemos apreciar que dicho módulo depende del
diagrama tensión-deformación del material, así como, de la geometría de la sección y también,
que .
Al igual que ocurría con la ecuación (2.2. 2), la (2.5. 8) es una ecuación diferencial lineal de
coeficientes constantes, luego su solución será exactamente la misma que para la (2.2. 2), excepto,
el valor de , que ahora es sustituido de nuevo por
La carga , es la conocida como carga de módulo elástico reducido, como es de esperar, se
cumple que
Para obtener la carga crítica para un determinado miembro necesitamos evaluar Haciendo
uso de las expresiones derivadas de la evaluación, podemos reducir la definición del módulo
elástico reducido dada por la ecuación (2.5. 12)
Particularizando esta expresión al caso de un perfil ideal en I, que se compone de dos alas de
igual área unidas mediante un alma de espesor despreciable, tenemos
(2.5. 10)
(2.5. 11)
(2.5. 9)
(2.5. 5)
(2.5. 6)
(2.5. 7)
(2.5. 8)

32
Debido a la dependencia que presenta con el módulo elástico tangente, , la ecuación que
define , no puede ser resuelta de manera inmediata. Por ello la variación de con se
obtiene de la curva tensión-deformación propia del material y la curva de diseño de la columna.
Podemos con estos datos construir una curva similar a la dada (figura 2. 16), en la que como
podemos observar la tensión crítica correspondiente a cualquier valor de puede obtenerse
fácilmente.
2. 5. 2 Teoría del Módulo Tangente
Consideraremos ahora la teoría del módulo tangente, para ello mantendremos las cinco
hipótesis enunciadas en la teoría anterior. Sólo una de las asunciones hechas anteriormente no será
mantenida ahora, y es que, la carga aplicada no será considerada constante durante la flexión de la
columna. En su lugar, la teoría del módulo tangente asume que la carga axil aplicada va en aumento
conforme la columna pasa de la configuración recta e indeformada a la combada. También
considera esta teoría que el aumento de la carga es superior al decremento causado por la flexión
en el lateral convexo del miembro, lo que significa que la compresión es creciente en toda sección
del elemento, luego el módulo tangente gobierna la relación tensión-deformación en todas éstas.
La diferencia entre ambas teorías se puede resumir en pocas líneas ;
La teoría del doble módulo considera que la carga es constante durante el paso de la
configuración recta a la deformada, siendo la carga crítica la que aplicamos. Luego, la compresión
Figura 2. 16. : Curva tensión –deformación propia del material.

33
aumenta según en el lado cóncavo de la columna y disminuye de acuerdo con en el convexo.
Mientras que por su parte, la teoría del módulo tangente considera la carga de compresión aplicada
creciente durante la deformación de la columna, no existe reversibilidad de tensiones en ningún
punto, es decir, el comportamiento de toda sección está gobernado por .
En los problemas estudiados hasta ahora, hemos definido la carga crítica como aquella bajo la
cual la estructura deja de estar en equilibrio estable en su posición recta indeformada. Esta
definición no es correcta para la nueva situación, ya que la carga axil aplicada aumenta conforme
aumenta también la deformación del elemento, esto quiere decir que pueden existir situaciones de
equilibrio en las que la carga sea superior a la critica. Daremos por eso una nueva definición a la
carga critica. Ahora la definiremos como la carga mínima ante la que puede ocurrir una bifurcación
del equilibrio, es decir, cambia el patrón de equilibrio del elemento.
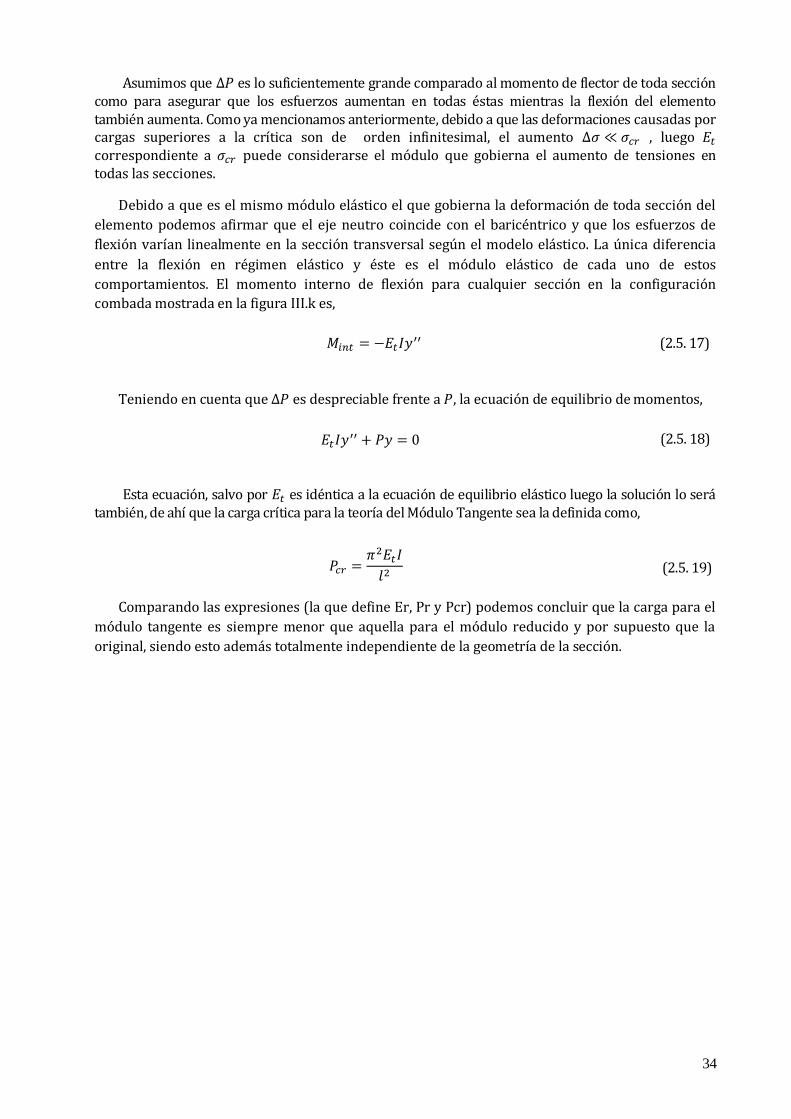
Para definir la nueva carga crítica, consideraremos la situación presentada a continuación,
Figura 2. 17. : Teoría del Módulo Tangente.
34
Asumimos que es lo suficientemente grande comparado al momento de flector de toda sección como para asegurar que los esfuerzos aumentan en todas éstas mientras la flexión del elemento también aumenta. Como ya mencionamos anteriormente, debido a que las deformaciones causadas por cargas superiores a la crítica son de orden infinitesimal, el aumento , luego correspondiente a puede considerarse el módulo que gobierna el aumento de tensiones en todas las secciones.
Debido a que es el mismo módulo elástico el que gobierna la deformación de toda sección del
elemento podemos afirmar que el eje neutro coincide con el baricéntrico y que los esfuerzos de
flexión varían linealmente en la sección transversal según el modelo elástico. La única diferencia
entre la flexión en régimen elástico y éste es el módulo elástico de cada uno de estos
comportamientos. El momento interno de flexión para cualquier sección en la configuración
combada mostrada en la figura III.k es,
Teniendo en cuenta que es despreciable frente a , la ecuación de equilibrio de momentos,
Esta ecuación, salvo por es idéntica a la ecuación de equilibrio elástico luego la solución lo será también, de ahí que la carga crítica para la teoría del Módulo Tangente sea la definida como,
Comparando las expresiones (la que define Er, Pr y Pcr) podemos concluir que la carga para el
módulo tangente es siempre menor que aquella para el módulo reducido y por supuesto que la
original, siendo esto además totalmente independiente de la geometría de la sección.
(2.5. 17)
(2.5. 18)
(2.5. 19)

35
3. Cálculo de Soportes Compuestos
3. 1 INTRODUCCIÓN
En la construcción de acero se emplean extensamente pilares compuestos, en especial cuando
las longitudes son grandes y las compresiones a las que deben hacer frente, relativamente
pequeñas. Estas estructuras compuestas se componen de dos o más largueros unidos entre sí por
perfiles o cartelas a escuadra o con riostras. Dependiendo de dicha unión podemos clasificar los
pilares, los de uso más común son:
Pilares compuestos con presillas.
Pilares compuestos con diagonales.
Figura 3. 1 : Pilar triangulado y pilar empresillado.
36
En este proyecto nos centraremos en el diseño y estudio de los pilares compuestos con diagonales.
Ya que uno de los objetivos principales del presente es la comparación de resultados obtenidos
mediante el método de diseño propuesto por el Eurocódigo y resolución teórica propuesta por [5] , y
que usaremos como modelo, la estructura analizada es una columna con enlaces en celosía.
Cuanto mayor sea la distancia entre los ejes de los cordones, mayor es el momento de inercia
de la sección del pilar compuesto; sin embargo, el aumento de rigidez se compensa con el
incremento de peso y del coste de las uniones entre elementos. Por último, resaltar que los pilares
compuestos son más flexibles que los macizos con igual momento de inercia, lo que deberemos
tener en cuenta en el cálculo.
Para determinar la resistencia que estos soportes de acero compuesto, presentan frente a
esfuerzos axiles, hay que llevar a cabo una serie de comprobaciones:
Un análisis del pilar compuesto para determinar los esfuerzos internos, teniendo en cuenta una
imperfección inicial equivalente y los efectos de segundo orden.
Comprobación de los cordones y de los elementos de unión (diagonales y presillas).
Comprobación de las uniones.
3. 2 TIPOS Y APLICACIONES
3. 2. 1 Aspectos Generales
Los pilares compuestos están formados por dos cordones paralelos interconectados mediante
elementos de enlace o presillas. Los sistemas en celosía pretenden la concentración del material en
los lugares que puedan resultar más eficaces desde el punto de vista estructural, para la
transmisión de esfuerzos.
Uno de los objetivos principales a cumplir por estos soportes es la de tener el menor peso
posible para una determinada altura. Prácticamente cualquier perfil laminado en caliente puede ser
utilizado para los cordones, sin embargo serán los perfiles en I los utilizados con mayor frecuencia.
La diferencia entre ambos tipos de pilares compuestos radica en el modo de unión de los
elementos del alma y cordones. El pilar de enlaces diagonales, como bien indica su nombre,
contiene diagonales con los extremos articulados, mientras que por otro lado, los pilares
empresillados tienen los extremos empotrados en los cordones que a su vez funcionan como panel
rectangular. Estas diferencias son las que hacen que un tipo u otro pueda resultar más adecuado
según la aplicación.
La inercia del pilar compuesto aumento con la distancia entre los ejes de los cordones, no
obstante no debemos olvidar que dicho aumento en la rigidez se ve contrarrestada por el aumento
de peso que esto conlleva. Puede también resultar perjudicado el coste de las uniones entre
elementos.
Concluimos por tanto, de esta breve introducción que, los soportes compuestos proporcionan
estructuras de gran altura, relativamente ligeras y con gran inercia. Son por eso, estructuras
pensadas para soportar desplazamientos horizontales muy limitados. La resistencia axial se ve

37
fuertemente afectada por las deformaciones por cortante. La imperfección por curvatura inicial
aumenta de manera significativa debido a la deformación por cortante.
Antes de centrarnos en el estudio más a fondo de las columnas compuestas enlazadas con
diagonales, que será que la que se diseñe en el presente proyecto, hagamos un breve recorrido por
la otra tipología de elementos compuestos principal. Sea esta tipología la de pilares compuestos
empresillados.
3. 2. 2 Pilares Compuestos Empresillados
Los pilares compuestos empresillados no son los más adecuados para estructuras de edificación
industrial por ello su uso está muy limitado y en condiciones especificas, donde las fuerzas
horizontales no sean importantes.
Las uniones entre cordones y los perfiles planos que suelen emplearse como presillas deben ser
rígidas. Los pilares empresillados están compuestos por dos planos paralelos de presillas, el
posicionamiento de éstas debe ser el mismo en ambos planos. Es fundamental que hayan refuerzos
tanto en los extremos del pilar, como en todos los puntos intermedios en los que se apliquen cargas
o que exista arriostramiento lateral.
Figura 3. 2. : Soporte empresillado, a) cordones con perfiles en U y b) cordones con perfiles en I.
3. 2. 3 Pilares Compuestos Triangulados
A pesar de la gran cantidad de configuraciones que los soportes compuestos triangulados
permiten, las más comunes son las disposiciones en N y en V.

38
Los perfiles en I son de nuevo los de más común utilización. Esto se debe a que son los más
eficaces desde el punto de vista estructural, es decir, permiten un enorme ahorro de material ya
que tienen menor canto. Para pilares compuestos cargados con fuerza de compresión axial
importante, los perfiles más adecuados serán el perfil en I o en H. Sólo en caso de que queramos
tener dos lados planos utilizaremos los perfiles en U.
3. 2. 3. 1 Diversas Geometrías de Triangulación
La disposición en forma de N de los elementos de enlace, es considerada como la configuración
más eficaz, empleada casi siempre en estructuras típicas de construcciones industriales. El alma de
la disposición en forma de N está formada por elementos diagonales y montantes que confluyen en
el mismo punto de los ejes de los cordones.
Esta disposición reduce la longitud de pandeo de los cordones de compresión y de los
elementos diagonales. Es por eso por lo que se suele utilizar en estructuras que presentan una
fuerza de compresión de gran magnitud.
Por otro lado, la disposición en forma de V tiene los efectos contrarios, es decir, aumenta la
longitud de pandeo de los cordones comprimidos y de los elementos diagonales, por tanto la
resistencia a pandeo se reduce. Ésta es una estructura que utilizaremos solo en casos de fuerza de
compresión pequeña.
La disposición en forma de X es casi en la mayoría de los casos descartada, debida a su
complejidad y coste, pero es por otro contra la disposición de mayor resistencia al pandeo, ya que
los enlaces acortan considerablemente la distancia entre los puntos de arriostramiento en ambos
cordones.
Figura 3. 3. : Diferentes configuraciones del soporte compuesto triangulado.
39
3. 3 COMPROBACIÓN SEGÚN EUROCÓDIGO 3 E INSTRUCCIÓN
EAE
3. 3. 1 Generalidades
La metodología de cálculo que se describe a continuación puede aplicarse para comprobar la
resistencia de los distintos componentes de un elementos compuesto con los extremos articulados.
Para la comprobación a pandeo de elementos compuestos debemos comenzar por diferenciar entre
elementos compuestos triangulados o empresillados.
Por otro lado, también se contempla la posibilidad de que existan uno o dos planos de pandeo,
lo que comporta comprobaciones diferentes.
3. 3. 2 Pandeo en Plano Perpendicular al Eje de Inercia Material
La comprobación a pandeo de un elemento compuesto en un plano perpendicular al eje de
inercia material debe llevarse a cabo como si de un elemento simple se tratara, pero teniendo en
cuenta las características de la sección transversal correspondientes al elemento compuesto[7].
3. 3. 3 Pandeo en Plano Perpendicular al Eje de Inercia Libre
Comenzaremos con la definición de la resistencia de cálculo a pandeo de una pieza comprimida,
según el EC3 (EAE) [7]:
donde,
Coeficiente de reducción del modo de pandeo a considerar.
Para secciones de las Clases 1,2 ó 3.
Área de la sección transversal de los cordones.
Límite elástico del material.
Coeficiente de seguridad para secciones de las Clases 1,2 ó 3.
Para la comprobación de seguridad a pandeo de la estructura deberemos tener en cuenta que el
tramo de perfil simple comprendido entre dos enlaces consecutivos debe comprobarse
considerando un esfuerzo axil de cálculo cuyo valor depende del tipo de enlace.
El valor de dicho axil en el caso de que ambos cordones sean idénticos,
(3.3. 1)
(3.3. 2)

40
donde es el valor de cálculo del máximo momento flector en el centro del elemento
compuesto, considerando los efectos de segundo orden.
siendo:
Esfuerzo axil crítico elástico efectivo del elemento compuesto.
Valor de cálculo del esfuerzo axil de compresión en el centro del elemento
compuesto.
Valor de cálculo del máximo momento flector en el centro del elemento
compuesto, sin considerar los efectos de segundo orden.
Distancia entre centros de gravedad de los cordones del elemento
compuesto.
Área de la sección transversal del cordón.
Imperfección geométrica, que se adopta igual a L/500.
Inercia efectiva del elemento compuesto, cuyo valor depende de si es
elemento triangulado o empresillado.
Rigidez a cortante de la triangulación utilizada para el enlace o del panel
empresillado; dicha rigidez depende de la tipología de enlace utilizada y su
valor puede obtenerse según figura 71.2.3.1.a.
Para los cordones sometidos a compresión, el valor de cálculo del esfuerzo axil de compresión
, obtenido tal como ha sido ya expuesto, deberá verificar:
donde es la resistencia de cálculo a pandeo del cordón comprimido, tomando como longitud
de pandeo la de la figura 3. 5.
3. 3.3. 1 Elemento Triangulado
En la figura 3. 4 se presentan los valores de la rigidez a cortante para determinadas geometrías de enlace habitualmente utilizadas en elementos triangulados. En el caso de que la tipología de enlace adoptado no se encuentre entre los adjuntos habrá que obtener el valor de recordando que es el valor de la rigidez a esfuerzo cortante, es decir, el valor del cortante necesario para producir una deformación por cortante de valor unidad.
(3.3. 3)
(3.3. 4)
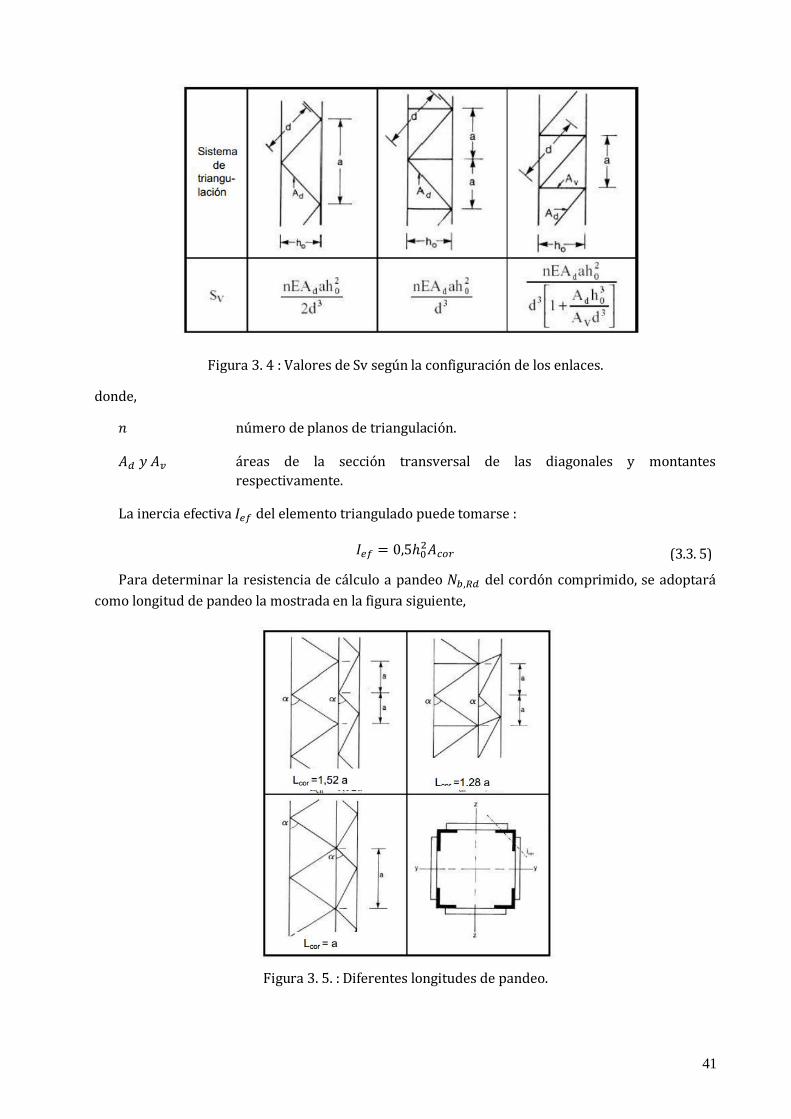
41
Figura 3. 4 : Valores de Sv según la configuración de los enlaces.
donde,
número de planos de triangulación.
áreas de la sección transversal de las diagonales y montantes
respectivamente.
La inercia efectiva del elemento triangulado puede tomarse :
Para determinar la resistencia de cálculo a pandeo del cordón comprimido, se adoptará
como longitud de pandeo la mostrada en la figura siguiente,
Figura 3. 5. : Diferentes longitudes de pandeo.
(3.3. 5)

42
3. 3. 3. 4 Estado Límite de Inestabilidad
3. 3.4. 1 Pandeo de elementos de Sección Constante
La comprobación de los elementos sometidos a compresión es la ya mencionada anteriormente,
debe cumplirse la condición dada por la (2.3. 4).
La resistencia de cálculo a pandeo de un elemento sometido a compresión se determinará del
modo siguiente:
Para secciones transversales de clase 1,2 y 3.
Para secciones transversales de clase 4.
donde es el coeficiente de reduccion para el modo de pandeo considerado.
Para la determinación de no es necesario contabilizar los agujeros para tornillos en los
extremos del elemento.
En elementos comprimidos de sección variable a lo largo de su directriz o con distribución no
uniforme del esfuerzo axil, la comprobación relativa a pandeo de dichos elementos debe llevarse a
cabo según otro método general también propuesto por la EAE, en los artículos 22 y 24 del Capítulo
V.
3. 3.4. 2 Curvas de Pandeo
Para elementos con sección transversal constante sometidos a un esfuerzo axil de compresión
de valor constante, el valor de para la esbeltez adimensional se determinará conforme a:
siendo :
coeficiente de imperfección.
en secciones de clase 1,2 y 3.
en secciones de clase 4.
esfuerzo axil crítico elástico para el modo de pandeo considerado, obtenido con las características de la sección bruta.
donde

43
El valor del coeficiente de imperfección para cada una de las curvas de pandeo se obtiene
según la tabla 35.1.2.a de la Instrucción del acero Estructural (EAE).
Figura 3. 6: Tabla 35.1.2.a Valores del coeficiente de imperfección.
La elección de la curva de pandeo para cada sección transversal se obtendrá de la tabla 35.1.2.b.
también extraida de la EAE. La cual podemos encontrar adjunta en la página siguiente.
Los valores del coeficiente de reducción , en función de la esbeltez adimensional , pueden
obtenerse a partir de la figura 2. 7. (gráfica 35.1.2, extraída de la EAE)
Figura 3. 7. : Gráfica 35.1.2 Curvas de pandeo
Para esbelteces o para relaciones podrá omitirse la comprobación frente a pandeo, teniéndose que llevar a cabo únicamente la comprobación resistente de la sección transversal.
Coef
icie
nte
de
reducc
ión
Esbeltez adimensional

44
Figura 3. 8. : Tabla 35.1.2.b Elección de las curvas de pandeo.
45
3. 4 TEORÍA
3. 4. 1 Introducción
En este apartado pasamos a presentar la comprobación de soportes compuestos propuesta por
el Laboratorio de Estructuras Metálicas perteneciente al Departamento de Ingeniería Estructural de
la Universidad Técnica de Atenas.
El método presentado a continuación, es el que ha sido seguido en dicha universidad para llevar
a cabo una investigación numérica y analítica de las cargas de colapso en columnas trianguladas.
El principio fundamental de dicha investigación, es demostrar que a pesar de que los soportes
compuestos son estructuras de uso muy común en obras ingenieriles, como pueden ser puentes o
construcciones metálicas de grandes luces o grandes cargas, ya que proporcionan una solución
relativamente económica. Hay que tener en cuenta dos consideraciones principales a la hora de
diseñar estas columnas, que las hacen diferentes al resto de estructuras. La primera de éstas, es la
significativa influencia de la deformación por cortante debido a la resistencia tan reducida que
presentan éstas a cizalladura. La segunda las consideraciones es la interacción existente entre el
pandeo local y global.
Una vez concluida la experimentación e implementación del problema, se concluye que la
mayor pérdida de capacidad portante de las columnas se produce cuando se alcanzan los valores de
las cargas críticas de Euler tanto a nivel local como global y además, se supera el límite elástico.
3. 4. 2 Método de Cálculo propuesto
Comenzamos considerando un soporte compuesto perfecto. Constituido por dos cordones de
perfiles de dos alas, es decir perfiles en I, extensamente espaciados uno de otro y conectados
mediante perfiles de enlace. Las alas de los cordones proporcionan resistencia a flexión mientras
que los enlaces aportan resistencia a cizalladura a la columna. Detalles fácilmente apreciable en
la figura 3.9 , imagen que ha sido tomada del artículo mismo.
Bajo la aplicación de una carga axil de compresión, podremos encontrar tres modos de fallo
diferentes. Los dos primeros están asociados al pandeo, tanto local como global. El tercero de éstos,
está asociado a la plastificación de los perfiles, debido a la carga de colapso o ”aplastamiento”.
El pandeo global de la estructura se produce cuando la carga alcanza el valor,
donde representa la carga crítica de Euler, definida como :
(3.4. 1)
(3.4. 2)
46
donde,
representa la inercia efectiva.
es la longitud efectiva de pandeo según los apoyos de la columna. De valor 1 en columnas simplemente apoyadas.
La inercia efectiva es debida en su mayoría al término de Steiner debido al momento de inercia
de la sección y es el dado por la expresión siguiente,
donde, es el área de los perfiles en I.
La resistencia a cizalladura de los soportes compuestos es proporcionada por los sistemas de
enlace, lo cual quiere decir que el valor de ésta depende de la tipología de unión entre cordones. Los
diferentes valores de pueden ser hallados en muchos libros de texto, así como en la figura
71.2.3.1.a. en el apartado anterior. Como estamos trabajando con un soporte compuesto con
uniones en X podemos definir la rigidez a cizalla como,
donde,
es el numero de planos de enlace.
es el área de la sección de los elementos de enlace.
es el ángulo entre diagonales de enlace.
En caso de que la rigidez a cizalla sea lo suficientemente grande la carga de pandeo global es
similar a la carga critica de Euler
El pandeo global está asociado a la curvatura de la columna en su conjunto, mientras que el
local está identificado como la curvatura indeseada de los perfiles entre puntos de enlace.
La carga de pandeo local viene definida por la expresión,
donde, es la inercia en el plano de pandeo de los perfiles en I.
El tercer modo de fallo, el asociado al fallo elástico de la estructura ocurre cuando la carga de
compresión alcanza un valor tal como,
donde, es el límite elástico del material.
(3.4. 4)
(3.4. 5)
(3.4. 6)
(3.4. 3)
47
3. 4. 3 Influencia de Imperfecciones
No podríamos obtener resultados “realistas” si no tenemos en cuenta que los elementos reales
no son perfectos, tendremos por lo tanto que tomar en consideración algunas imperfecciones
iniciales en el soporte compuesto ya que esto modifica considerablemente el comportamiento de la
estructura.
En la investigación se experimentó numéricamente el comportamiento de columnas
imperfectas, siendo dichas imperfecciones geométricas y materiales. La máxima imperfección
global viene dada según , y aparecerá siempre en la sección media de la
columna.
En esta misma experimentación se estudió también el comportamiento del soporte cuando la
imperfección geométrica no solo tenía carácter global, se añade además, el estudio del
comportamiento a pandeo del soporte cuando las imperfecciones son tanto locales como globales.
La desviación geométrica local viene dada según , y al contrario que la global, no
aparece sólo en la sección media de la columna, aparecerá en el centro de cada uno de los tramos
entre enlaces.
Las diferencias que estas imperfecciones causan en los modos de pandeo son fácilmente
apreciables en la figura adjunta. En la que podemos observar modos de pandeo de una columna con
imperfección global y también modos de pandeo de una columna con ambas imperfecciones, global
y local.
Por último, lo que dicha investigación nos propone es contemplar la posibilidad de que el
material con el que se construye el soporte no sea perfecto, es decir, que existan imperfecciones
materiales. Para el estudio de dicho fenómeno, en el artículo podemos encontrar una serie de
gráficas en las que se pone de manifiesto la evolución de la deformación del soporte conforme
aumentamos la carga y ésta se hace más próxima a la carga crítica de pandeo, global o local.
Será esto lo que tomaremos como ejemplo para cuando, después de la resolución del problema,
pasemos al análisis de resultados en capítulos posteriores.

48
Figura 3. 9. : (a) típico soporte compuesto y (b) la sección del mismo [5].
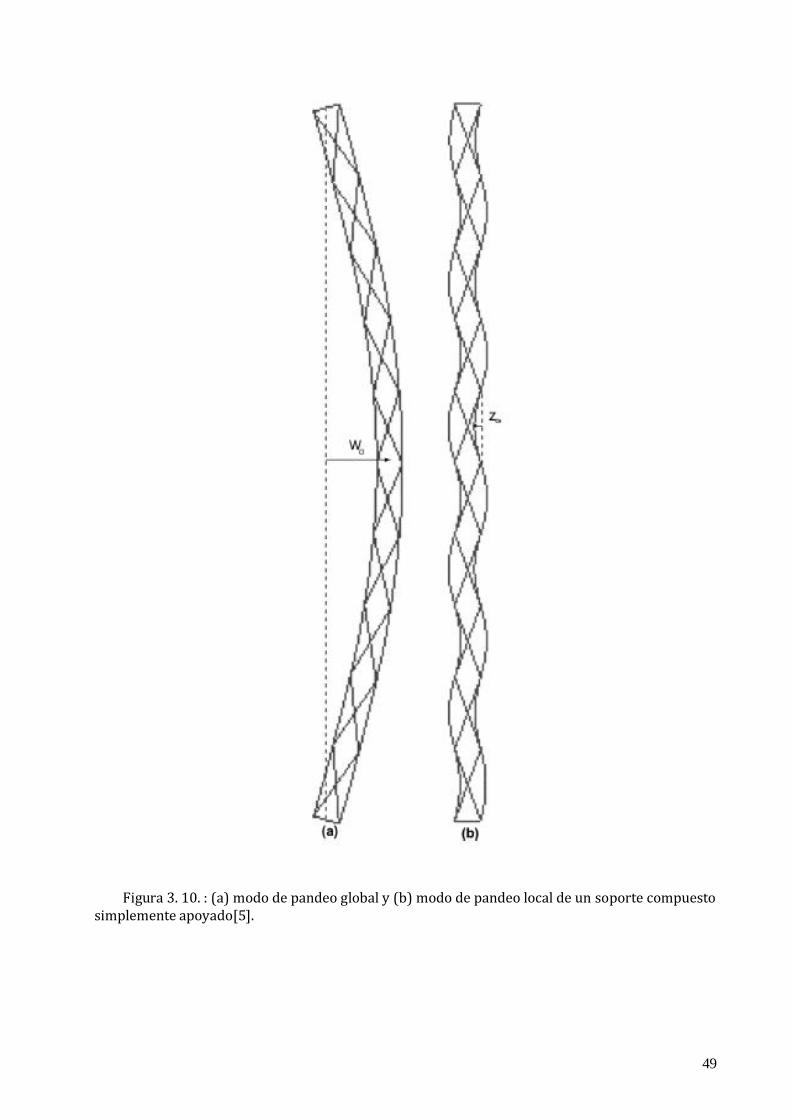
49
Figura 3. 10. : (a) modo de pandeo global y (b) modo de pandeo local de un soporte compuesto simplemente apoyado[5].
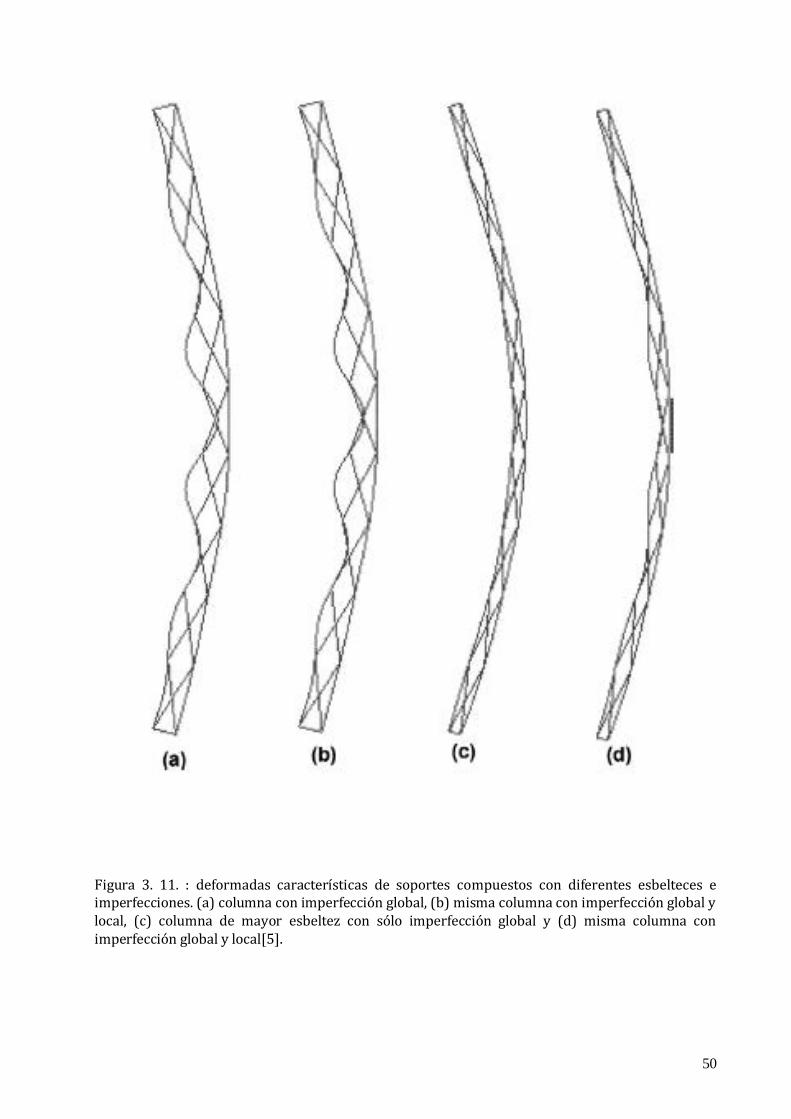
50
Figura 3. 11. : deformadas características de soportes compuestos con diferentes esbelteces e imperfecciones. (a) columna con imperfección global, (b) misma columna con imperfección global y local, (c) columna de mayor esbeltez con sólo imperfección global y (d) misma columna con imperfección global y local[5].
51
4. Análisis de Estabilidad con
ANSYS
4. 1 INTRODUCCIÓN
En este tema trataremos de introducir de manera breve y clara la herramienta utilizada para la
resolución de los casos planteados. Más concretamente, se establecerán y desarrollarán las bases
sobre las que se establece el MEF, así como los aspectos fundamentales del software comercial que
utilizaremos para la resolución numérica de nuestros problemas, ANSYS. Vamos a realizar ambos
desarrollos en este único capítulo ya que la metodología seguida por el software para la resolución
de problemas, es el MEF.
4. 2 ASPECTOS GENERALES DEL MEF
El método de los elementos finitos (MEF) ha adquirido una gran importancia en la solución de
problemas de tipo ingenieril, físicos, etc. Debido a que permite resolver casos que hasta hace
relativamente poco eran prácticamente imposibles de resolver siguiendo métodos matemáticos
tradicionales. Esto obligaba a realizar prototipos para ensayarlos e ir realizando mejoras de forma
iterativa, lo que traía consigo un elevado coste tanto económico como temporal.
El MEF permite la realización de un modelo matemático de cálculo del sistema real, bastante
más fácil y económico que el hecho de tener que trabajar modificando un prototipo. Pero no
debemos olvidar que se trata de un método de cálculo aproximado debido a las hipótesis básicas
del mismo, obteniendo de éste una solución exacta en un conjunto finito de puntos. Podríamos
concluir pues, que los prototipos, aunque en menor número, siguen siendo necesarios ya que la
solución proporcionada por el MEF se acerca bastante al diseño óptimo.
La idea general del método de los elementos finitos es la división de un continuo en un conjunto
de pequeños elementos interconectados por una serie de puntos llamados nodos, en los que como
se ha mencionado antes, la solución es exacta. Serán las ecuaciones que rigen el comportamiento
del continuo las que regirán también el del elemento. Con esto, conseguimos pasar de un sistema
continuo (con infinitos grados de libertad), que es regido por una ecuación o sistema de ecuaciones
diferenciales, a un sistema con un número de grados de libertad finito cuyo comportamiento se
modela por un sistema de ecuaciones que podrían o no, ser lineales.
En todo sistema a analizar podremos distinguir:
Dominio: espacio geométrico donde se va a analizar el sistema.

52
Condiciones de contorno: variables conocidas y que condicionan el cambio del sistema,
siendo éstas: cargas, desplazamientos, temperaturas, etc.
Incógnitas: variables del sistema que deseamos conocer después de que las condiciones de
contorno hayan actuado sobre el sistema: desplazamientos, tensiones, temperaturas, etc.
Para la resolución del problema, el método de los elementos finitos supone el dominio
discretizado en subdominios denominados elementos. Podremos dividir el dominio mediante
puntos, si el caso es lineal, mediante líneas, si estamos con caso bidimensional o incluso, superficies
imaginarias cuando estemos trabajando con un caso tridimensional. Con esto se pretende que el
dominio total en estudio se aproxime mediante el conjunto de porciones (elementos) en que se
subdivide.
El número discreto de puntos en los que conectan entre sí los elementos, es lo que
anteriormente hemos llamado nodos. Sobre ellos se materializan las incógnitas fundamentales del
problema.
En el caso de elementos estructurales, estas incógnitas son los desplazamientos nodales, ya que
a partir de éstos podemos calcular el resto de incógnitas que nos interesen, como puedan ser las
tensiones, deformaciones… a estas incógnitas es a lo que se les denomina grados de libertada,
correspondiente a cada nodo del modelo. Sean estos grados de libertad del nodo, las variables que
nos determinan el estado y/o posición del nodo.
Un ejemplo de esto que contamos aquí, aplicándolo a la barra en voladizo con carga puntual y
sometido a distribución de temperatura, la discretización del dominio podría ser el de la figura 4.2.
Figura 4. 1. : Ejemplo de sistema a analizar
Figura 4. 2. : Discretización del dominio.

53
En el caso adjunto, los grados de libertad serían:
Desplazamiento en dirección x.
Desplazamiento en dirección y.
Giro según z.
Temperatura.
El sistema, a causa de las condiciones de contorno: empotramiento, fuerza puntual y
temperatura, evoluciona hasta un estado final. En este estado final, una vez sean conocidos los
valores de los grados de libertad de los nodos del sistema podremos determinar cualquier otra
incógnita deseada. Podría ser posible, en caso de que así o quisiéramos, obtener la evolución
temporal de cualquier de los grados de libertad.
Mediante el planteamiento de la ecuación diferencial que rige el comportamiento del continuo
para el elemento, podemos llegar a fórmulas que relacionan el comportamiento en el interior del
mismo con el valor tomado por los grados de libertad nodales. Esto deberemos realizarlo mediante
funciones de interpolación, ya que lo que hacemos es interpolar el valor de la variable nodal dentro
del elemento.
El problema es formulado en forma matricial, debido a la facilidad de manipulación de las
matrices mediante sistemas ordenadores. Conocidas las matrices que definen el comportamiento
del elemento (en el caso estructural serán las llamadas matrices de rigidez, amortiguamiento y
masa) se ensamblan y se forma un conjunto de ecuaciones algebraicas, lineales o no, que
resolviéndolas nos proporcionarán los valores de los grados de libertad en los nodos del sistema.
Objetivos del Análisis mediante Método de los Elementos Finitos
Conviene observar que la aplicación manual del MEF sólo es posible (en términos de tiempos
razonables de resolución) para geometrías sencillas bajo hipótesis de cargas no demasiado
complejas. Es por eso por lo que habitualmente, abordaremos este tipo de problemas mediante la
utilización de aplicaciones informáticas cuyo funcionamiento este basado en el cálculo por MEF, por
ejemplo ANSYS.
Antes de comenzar a resolver un problema mediante cualquier programa de Elementos Finitos
debemos reflexionar sobre una serie de puntos, con esto pretendo evitar que la mala utilización de
la herramienta informática nos conduzca a una mala aproximación de la solución real. Esto no sería
extraño debido a que el MEF no deja de ser un método aproximado que facilita la obtención de la
solución de un problema de cierta complejidad.
1. QUÉ SE PRETENDE.
Determinar tensiones, ver cómo evoluciona el sistema, calcular frecuencias y modos propios…
esta pregunta nos permite determinar el tipo de análisis a realizar.
2. CÓMO VA A SER LA GEOMETRÍA QUE VAMOS A ANALIZAR.
Seguramente conocemos la geometría real del problema, pero a la hora de realizar su análisis
deberemos simplificarla al máximo, siempre en función del objetivo del análisis, ya que la mayoría
de los detalles son superfluos y sólo implican un consumo excesivo de tiempo de cálculo y de
espacio de almacenamiento. Para ello, buscaremos posibles simetrías, antisimetrías, axisimetrías
54
del problema , problemas de tensión o deformación planas, eliminación de detalles superfluos:
radios de acuerdo, entallas… Esto no será tarea complicada en nuestro modelo debido a la
simplicidad geométrica que caracteriza a los soportes compuestos elegidos para modelar.
Una vez estudiada la geometría podremos decidir el o los tipos de elementos a utilizar, las
características de los mismo, las propiedades del material o materiales, etc.
3. QUÉ CONDICIONES DE CONTORNO IMPONEMOS SOBRE EL SISTEMA A ESTUDIAR
Serán conocidas pero deberemos estudiar si son o no importantes o influyentes en el tipo de
análisis que vamos a realizar (podría darse el caso de que el resultado sea independiente de las
condiciones, como pasaría por ejemplo si nuestro sistema está sometido a un cambio brusco de
temperatura pero realizamos análisis modal para conocer sus frecuencias naturales). Una vez
decididas las condiciones de contorno hemos de estudiar la forma de aplicarlas, si representan las
condiciones reales del problema, si existe equilibrio (si es análisis estático), etc. La imposición de
las condiciones de contorno adecuadas es una de las decisiones mas complejas a la hora de realizar
un análisis por elementos finitos.
Una vez más, la simplicidad de nuestro problema a resolver hace que la elección de las
condiciones de contorno necesarias no sea tarea tediosa. Al tratarse de un soporte compuesto
simplemente apoyado, sólo debemos evitar mediante las condiciones de contorno los
desplazamientos como sólido rígido.
4. QUÉ RESULTADOS ESPERAMOS OBTENER
Para poder saber si el análisis que hemos realizado es correcto o si representa bien la realidad,
deberemos tener una idea de cómo va a responder. Por ejemplo, si estamos analizando una tubería
sometida a presión interior y los resultados nos indican que disminuye el radio deberemos pensar
que hemos modelado mal el sistema, ya sea en la aplicación de las cargas, en el mallado o cualquier
otro de los factores.
4. 3 NO LINEALIDAD EN MECÁNICA DE SÓLIDOS Y
ESTRUCTURAS
El comportamiento no lineal de sólidos puede presentarse de dos maneras diferentes, puede
tratarse de una no linealidad geométrica o de una no linealidad material. En lo que a este
documento respecta nos interesaremos por ambas tipologías de no linealidad. La no linealidad
geométrica es fruto de las importantes diferencias existentes entre la geometría antes y después de
deformar, teniendo en cuenta grandes desplazamientos. La no linealidad material es debida al
comportamiento elasto-plástico del material, en lugar de un comportamiento perfectamente
elástico.
Las grandes diferencias mencionadas entre situación deformada e indeformada, hacen que no
sea posible obtener relaciones lineales entre desplazamientos y deformaciones, o plantear el
equilibrio respecto de la posición indeformada como se ha visto previamente al analizar el pandeo
de Euler.
55
Debido a que existe la posibilidad de que el pandeo y la bifurcación del equilibrio se produzca
incluso antes de que aparezcan las deformaciones finitas, será necesaria la consideración de efectos
no lineales con vistas a la obtención de una solución lo más exacta posible.
El cálculo no lineal es simplemente un método basado en la resolución iterativa del problema,
en cada paso se aproxima a la solución buscada, siempre tomando como punto de partida la
solución anterior. Cabe suponer pues, que cada solución es mejor a la anterior y que el problema
puede darse por concluido una vez se cumpla una determinada condición, es decir, cuando
converja.
Como hemos comentado anteriormente, la solución se actualiza a partir de la anterior, lo cual
en un problema estructural en el que se dan grandes desplazamientos supone que los parámetros
correspondientes al vector desplazamientos se vayan modificando en cada uno de los pasos de
carga. Esto quiere decir que la geometría llegado un paso de carga determinado será diferente a la
inicial, pudiendo esto provocar la aparición de nuevos esfuerzos a causa de la carga aplicada.
Un ejemplo claro y sencillo de lo anterior sería el caso del estudio de placas sometidas a ciertos
estados de cargas y bajo ciertas hipótesis de contorno. A medida que vamos aumentando la carga la
geometría en iteraciones sucesivas se va asemejando a la de una lamina y como consecuencia
aparecerán esfuerzos de membrana “estabilizadores”, los cuales desconoceríamos y nos sería
imposible determinar mediante un análisis lineal.
El problema no lineal lo resolveremos dando solución a un sistema de ecuaciones algebraicas , con la forma:
Donde,
representa al conjunto de parámetros de discretización (parámetros geométricos en
nuestro caso).
vector independiente de los parámetros.
vector dependiente de los parámetros.
Para obtener resultados que puedan ser considerados realistas necesitamos tener un
conocimiento físico de la naturaleza del problema y por lo general, usar pasos de carga pequeños a
partir de soluciones conocidas, principalmente en los casos en los que la curva carga-
desplazamiento presenta bifurcaciones a ciertos niveles de carga.
56
4. 4 ESQUEMAS DE RESOLUCIÓN: NEWTON-
RAPHSON
El Método de Newton-Raphson [6] es un proceso iterativo para resolver ecuaciones no lineales,
es también un método abierto ya que su convergencia global no está garantizada. La única manera
de alcanzar la convergencia es seleccionar un valor lo suficientemente cercano a la raíz buscada.
Así, comenzaremos la iteración con un valor razonablemente cercano al cero, sea éste el conocido
como punto de arranque. La naturaleza de la propia función facilita o dificulta la convergencia del
problema, ya que el presentar múltiples puntos de inflexión o grandes pendientes en la cercanía de
la raíz, hacen que las posibilidades de que nuestro algoritmo diverja crezcan.
Una vez elegido el punto de arranque el método linealiza la función por la recta tangente en ese
mismo valor. La abscisa de dicha recta, según el método, es una mejor aproximación de la raíz que
el valor anterior. Se realizarán sucesivas iteraciones hasta que el método haya convergido lo
suficiente.
Las ecuaciones resueltas por el método son del tipo:
Donde,
es el Jacobiano de la matriz o matriz de rigidez tangente.
subíndice que representa la iteración de equilibrio actual.
vector de cargas aplicadas sobre la estructura.
vector de las fuerzas restauradoras correspondiente a las cargas elementales
internas.
vector de desplazamientos, son los gdl, las incógnitas del problema.
y
se evalúan según los valores dados por . La diferencia entre las fuerzas
aplicadas y las restauradoras , , es lo que llamamos residuo o vector de cargas
desequilibradas.
Como se puede intuir a partir de los descrito hasta aquí, se requiere mas de una sola iteración
del método Newton-Rapshon para obtener una solución que converja. Describamos el algoritmo
general brevemente:
1. Se supone es normalmente la solución convergida del paso de carga previo, “time step”.
En el primer paso de carga
2. Calcular la matriz tangente modificada , así como, la carga restauradora
a partir
de la configuración de los .
(4.2. 1)
(4.2. 2)
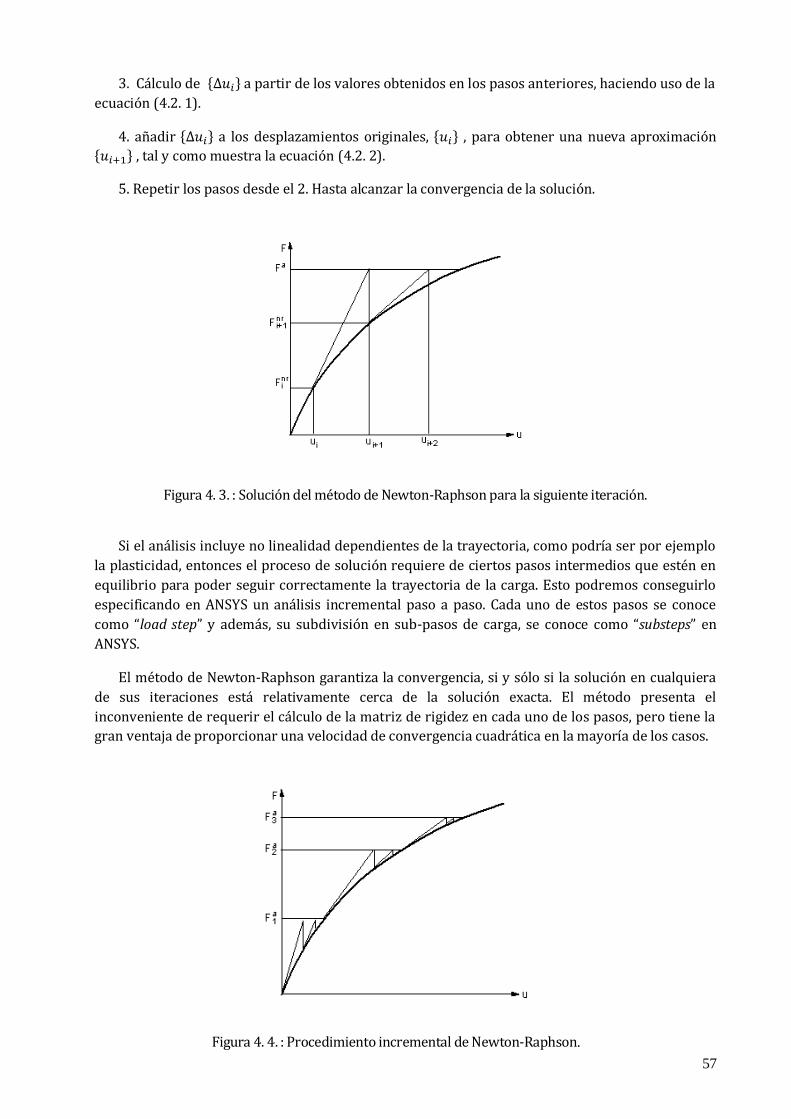
57
3. Cálculo de a partir de los valores obtenidos en los pasos anteriores, haciendo uso de la
ecuación (4.2. 1).
4. añadir a los desplazamientos originales, , para obtener una nueva aproximación
, tal y como muestra la ecuación (4.2. 2).
5. Repetir los pasos desde el 2. Hasta alcanzar la convergencia de la solución.
Figura 4. 3. : Solución del método de Newton-Raphson para la siguiente iteración.
Si el análisis incluye no linealidad dependientes de la trayectoria, como podría ser por ejemplo
la plasticidad, entonces el proceso de solución requiere de ciertos pasos intermedios que estén en
equilibrio para poder seguir correctamente la trayectoria de la carga. Esto podremos conseguirlo
especificando en ANSYS un análisis incremental paso a paso. Cada uno de estos pasos se conoce
como “load step” y además, su subdivisión en sub-pasos de carga, se conoce como “substeps” en
ANSYS.
El método de Newton-Raphson garantiza la convergencia, si y sólo si la solución en cualquiera
de sus iteraciones está relativamente cerca de la solución exacta. El método presenta el
inconveniente de requerir el cálculo de la matriz de rigidez en cada uno de los pasos, pero tiene la
gran ventaja de proporcionar una velocidad de convergencia cuadrática en la mayoría de los casos.
Figura 4. 4. : Procedimiento incremental de Newton-Raphson.

58
En la figura se pueden observar claramente los “load step” y los “substeps” que estos engloban.
En las situaciones de interés para este proyecto estos subpasos de carga se deberán al incremento
paulatino de la carga que actúa sobre la estructura, hasta alcanzar un cierto valor establecido o
converger a la solución deseada en base a un determinado criterio.
4. 5 ANSYS
En este apartado continuaremos con la presentación de las herramientas que nos van a permitir
resolver el problema planteado en el Capítulo 5. No olvidemos que esta herramienta que ahora
pasamos a presentar no es más que una nueva incorporación a las teóricas ya presentadas en el
Capítulo 2. Nos vamos a centrar en la presentación del programa de cálculo ANSYS, el cual en base a
los métodos numéricos presentados en apartados anteriores del corriente capítulo, nos permitirá
reproducir modelos matemáticos del problema objeto del proyecto, detallado en el capítulo
siguiente.
El problema brevemente introducido y descrito ya en capítulos anteriores será descrito con
mayor detalle en el Capítulo 5, en el que además pasaremos a su modelación y resolución mediante
ANSYS, buscando así valorar la holgura con la que trabajan las normativas para el cálculo de
soportes compuestos, a partir de resultados de mayor similitud a los reales, proporcionados por en
software informático en cuestión. Enfocaremos dicha valoración desde un punto de vista
marcadamente docente.
4. 5. 1 Análisis de Pandeo. Análisis Lineal vs. No Lineal
El módulo de Solución de ANSYS permite, entre otras muchas posibilidades, realizar un
“Buckling Analysis” o lo que es lo mismo, un ‘Análisis de Pandeo’ de la estructura. Dicho análisis nos
permitirá determinar, para un sistema con geometría concreta y bajo determinado régimen de
carga y condiciones de contorno, los valores que de las cargas para los cuales la estructura se
vuelve inestable, así como el modo de pandeo en el que dicha inestabilidad se pondrá de manifiesto.
Una vez hayamos seleccionado el “Buckling Analysis” , ANSYS nos permite elegir entre realizar
un análisis LINEAL o un análisis NO LINEAL. Para ello solo tendremos que elegir entre realizar un
análisis del tipo “Eigenvalue” o usar el comando “NLGEOM, ON” , esto quiere decir que se va a
realizar un análisis estático en el que se van a considerar los grandes desplazamientos.
Como cabe esperar y además ha sido comentado con anterioridad, estos análisis pueden arrojar
resultados muy diferentes en determinados de geometría y carga, es por eso por lo que ahora
intentaremos aclarar las principales diferencias entre uno y otro.
4. 5.1. 1 Análisis Lineal de Pandeo
La ejecución de un análisis lineal de pandeo establece un valor de la carga de pandeo basado en las
teorías clásicas planteadas en el capítulo anterior (cap.3), aplicadas a una estructura lineal y elástica,
luego, lo que este análisis nos determina son los puntos de bifurcación del equilibrio. Resolver un
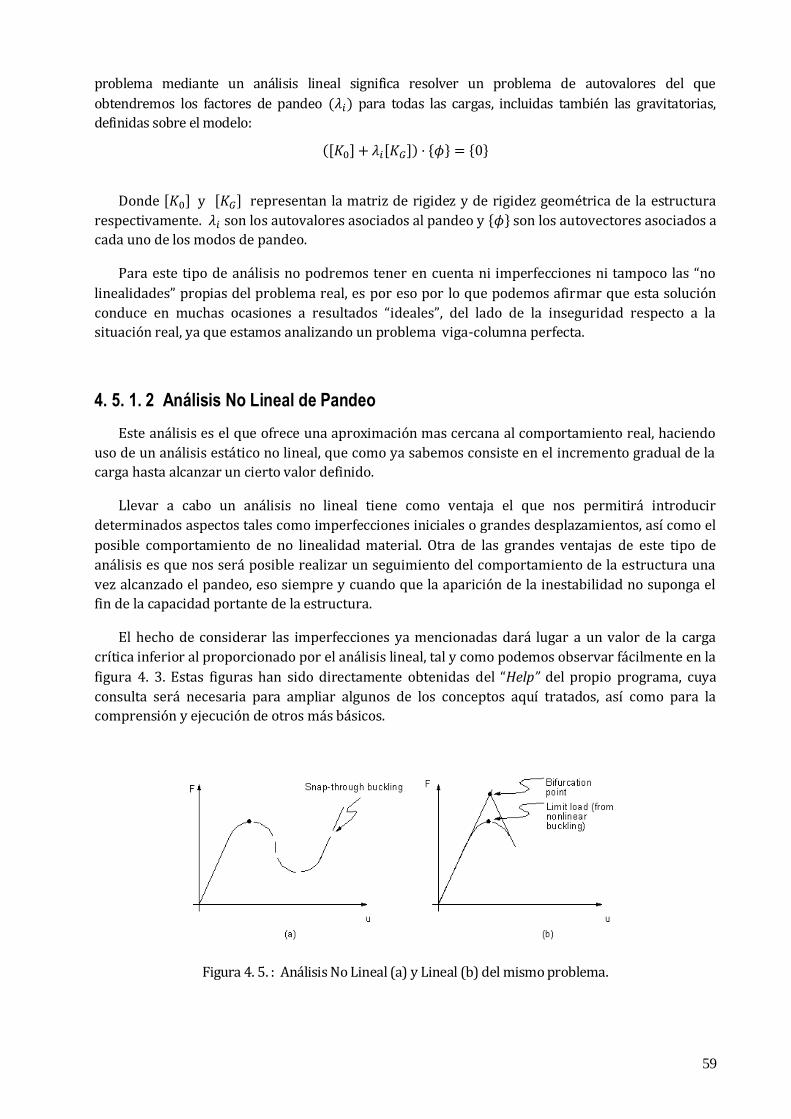
59
problema mediante un análisis lineal significa resolver un problema de autovalores del que
obtendremos los factores de pandeo para todas las cargas, incluidas también las gravitatorias,
definidas sobre el modelo:
Donde y representan la matriz de rigidez y de rigidez geométrica de la estructura
respectivamente. son los autovalores asociados al pandeo y son los autovectores asociados a
cada uno de los modos de pandeo.
Para este tipo de análisis no podremos tener en cuenta ni imperfecciones ni tampoco las “no
linealidades” propias del problema real, es por eso por lo que podemos afirmar que esta solución
conduce en muchas ocasiones a resultados “ideales”, del lado de la inseguridad respecto a la
situación real, ya que estamos analizando un problema viga-columna perfecta.
4. 5. 1. 2 Análisis No Lineal de Pandeo
Este análisis es el que ofrece una aproximación mas cercana al comportamiento real, haciendo
uso de un análisis estático no lineal, que como ya sabemos consiste en el incremento gradual de la
carga hasta alcanzar un cierto valor definido.
Llevar a cabo un análisis no lineal tiene como ventaja el que nos permitirá introducir
determinados aspectos tales como imperfecciones iniciales o grandes desplazamientos, así como el
posible comportamiento de no linealidad material. Otra de las grandes ventajas de este tipo de
análisis es que nos será posible realizar un seguimiento del comportamiento de la estructura una
vez alcanzado el pandeo, eso siempre y cuando que la aparición de la inestabilidad no suponga el
fin de la capacidad portante de la estructura.
El hecho de considerar las imperfecciones ya mencionadas dará lugar a un valor de la carga
crítica inferior al proporcionado por el análisis lineal, tal y como podemos observar fácilmente en la
figura 4. 3. Estas figuras han sido directamente obtenidas del “Help” del propio programa, cuya
consulta será necesaria para ampliar algunos de los conceptos aquí tratados, así como para la
comprensión y ejecución de otros más básicos.
Figura 4. 5. : Análisis No Lineal (a) y Lineal (b) del mismo problema.

60
De la observación de las figuras podemos concluir, como ya habíamos adelantado, que el valor
de la carga critica que arroja el análisis no lineal está por debajo del determinado por el análisis
lineal, que relaciona la aparición de la inestabilidad con el punto de bifurcación teórico.
4. 5. 2 Aspectos Fundamentales del Análisis No Lineal
El análisis no lineal en ANSYS consiste en la ejecución de un análisis estático con el comando
“NLGEOM,ON” activo, eso quiere decir que se considerarán los grandes desplazamientos, hasta
alcanzar la carga crítica , o una carga máxima previamente establecida.
Si consultamos la seccion de Ayuda “Help”) del programa nos damos cuenta de que ANSYS
emplea una aproximación mediante el método de Newton-Raphson para la resolución del problema
no lineal, de ahí que éste haya sido desarrollado en el apartado anterior.
Como se comentó durante el desarrollo del método de Newton-Raphson, el proceso iterativo requiere
de unos pasos de carga, que a su vez pueden estar divididos en subpasos, que permitirán la
convergencia de la solución hasta el entorno de un valor esperado.
También ha sido comentado con anterioridad el hecho de que el análisis lineal de pandeo
proporciona un valor de la carga crítica que usualmente, suele exceder al calculado mediante el
análisis no lineal. De ahí que sea recomendable realizar un análisis lineal previo (eigenvalue
analysis) de manera que nos sea mas sencillo y de manera mas exacta, la definición del valor
máximo para el paso de carga. Para que la solución converja correctamente, podemos afirmar que
es necesario que los pasos de carga sean lo suficientemente pequeños.
Una de las mayores facilidades y ventajas que proporciona ANSYS a la hora de realizar un
análisis no lineal, que como podemos apreciar puede conllevar cierta complejidad, es que nos
permite tanto la introducción manual de dichos criterios pero también nos ofrece la posibilidad de
una determinación automática de los pasos de carga, con objeto de prevenir problemas de
convergencia.
Debemos tener cuidado, ya que otro tipo de problemas de convergencia pueden ocurrir en
casos en los que el sistema objeto de estudio alcance un punto de inestabilidad que lo conduzca a
una nueva posición de equilibrio, es el ya conocido fenómeno del “snap through”. Para estas
situaciones es conveniente activar un esquema iterativo diferente al recogido en la figura 4. 4. Es el
denominado “Arc-length Method” el cual se presenta en la figura siguiente:
Figura 4. 6. : Método Newton-Raphson frente al Arc-Length Method.
61
El “Arc-Length Method” es descrito por ANSYS como el método adecuado para predecir la
respuesta correcta de estructuras con comportamientos complejos como el “snap-through” y el
“snap-back y seguir la trayectoria no lineal a través de los puntos límite. El Método de Newton-
Raphson puede llegar a divergir en el momento en el que la pendiente de la curva F-u se hace nula
en algún punto.
En cualquier caso, la no convergencia del problema no necesariamente implica haber alcanzado
la máxima capacidad de carga del sistema o que el método esté fallando, sino que puede ser debida
a inestabilidades numéricas, como la comentada en el párrafo anterior, que en ocasiones pueden
ser resultas mediante un refinamiento del modelo.
Algo muy importante y que no debemos olvidar tener en cuenta, es el comportamiento de las
cargas durante la deformación de la estructura. Determinadas cargas como las fuerzas
concentradas o las fuerzas de inercia conservarán la dirección de aplicación durante todo el
desarrollo del análisis. Hecho que no será igual cuando lo que se aplican son cargas de presión, ya
que estas actualizarán su dirección al mismo tiempo que lo hace la geometría del modelo,
manteniéndose siempre perpendicular a la superficie de aplicación. Este será un aspecto
importante a tener en cuenta a la hora de modelar.
4. 5. 3 Familias de Elementos Utilizados
Definamos familia de elementos como el grupo de elementos englobados con características
similares como pueden ser:
Geometría (elementos bidimensionales, tridimensionales, planos, etc).
Número de nodos (afecta al número de puntos para los cuales se realizará la
aproximación exacta de la solución, y por lo tanto a las funciones de forma que
aproximarán los valores de la misma en el resto del sistema continuo) [2].
Grados de libertad de los nodos.
Etc.
Con objeto de justificar la utilización de los elementos usados en este proyecto, trataremos de
describir en este apartado de manera breve las características mas importantes de cada uno de
ellos.
No olvidemos que el objetivo principal de este proyecto es comprobar el margen de seguridad
con el que trabajamos al diseñar soportes compuestos haciendo uso de la Normativa y otros
métodos teóricos , luego , para una correcta y justa comparación buscaremos que nuestro modelo
sea lo mas sensible y realista posible.
3.3 .1 Elementos “BEAM”
Los elementos BEAM son elementos uniaxiales que pueden estar sometidos a tensión,
compresión y flexión. De entre todos ellos nos interesaremos en concreto por los tipos BEAM3, muy
utilizado en estructuras de barras, y los del tipo BEAM188, que incluyen la deformación por
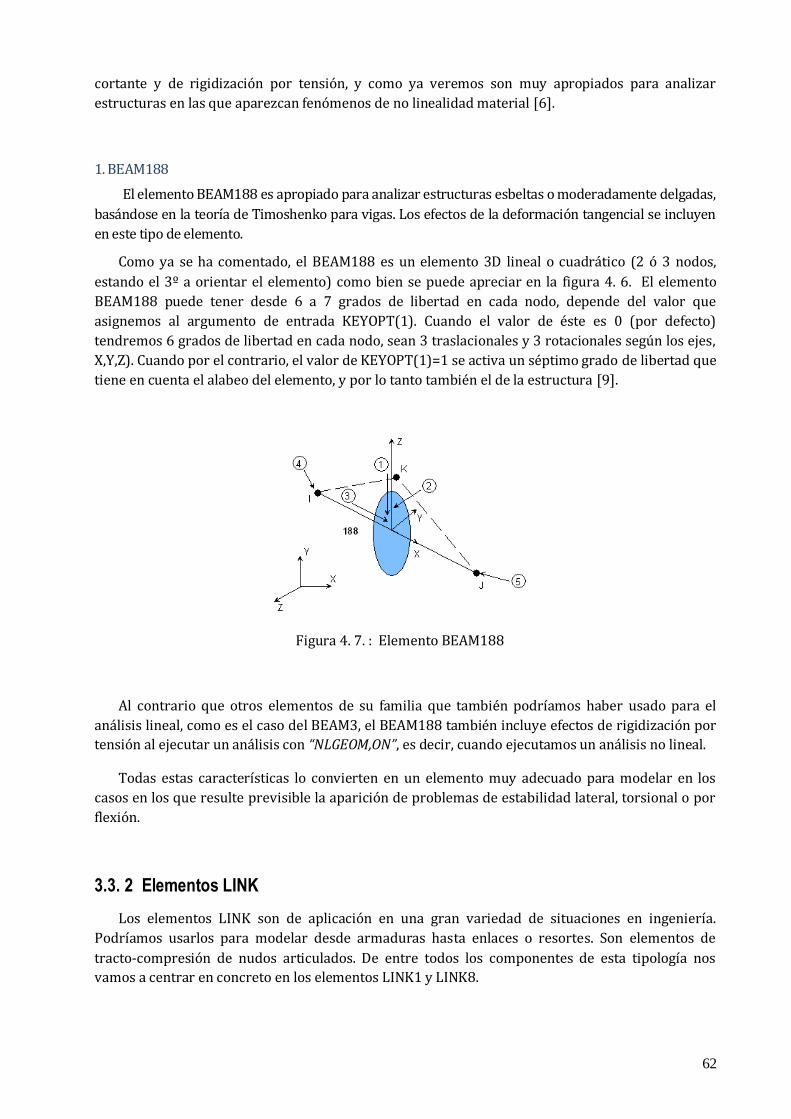
62
cortante y de rigidización por tensión, y como ya veremos son muy apropiados para analizar
estructuras en las que aparezcan fenómenos de no linealidad material [6].
1. BEAM188
El elemento BEAM188 es apropiado para analizar estructuras esbeltas o moderadamente delgadas,
basándose en la teoría de Timoshenko para vigas. Los efectos de la deformación tangencial se incluyen
en este tipo de elemento.
Como ya se ha comentado, el BEAM188 es un elemento 3D lineal o cuadrático (2 ó 3 nodos,
estando el 3º a orientar el elemento) como bien se puede apreciar en la figura 4. 6. El elemento
BEAM188 puede tener desde 6 a 7 grados de libertad en cada nodo, depende del valor que
asignemos al argumento de entrada KEYOPT(1). Cuando el valor de éste es 0 (por defecto)
tendremos 6 grados de libertad en cada nodo, sean 3 traslacionales y 3 rotacionales según los ejes,
X,Y,Z). Cuando por el contrario, el valor de KEYOPT(1)=1 se activa un séptimo grado de libertad que
tiene en cuenta el alabeo del elemento, y por lo tanto también el de la estructura [9].
Al contrario que otros elementos de su familia que también podríamos haber usado para el
análisis lineal, como es el caso del BEAM3, el BEAM188 también incluye efectos de rigidización por
tensión al ejecutar un análisis con “NLGEOM,ON”, es decir, cuando ejecutamos un análisis no lineal.
Todas estas características lo convierten en un elemento muy adecuado para modelar en los
casos en los que resulte previsible la aparición de problemas de estabilidad lateral, torsional o por
flexión.
3.3. 2 Elementos LINK
Los elementos LINK son de aplicación en una gran variedad de situaciones en ingeniería.
Podríamos usarlos para modelar desde armaduras hasta enlaces o resortes. Son elementos de
tracto-compresión de nudos articulados. De entre todos los componentes de esta tipología nos
vamos a centrar en concreto en los elementos LINK1 y LINK8.
Figura 4. 7. : Elemento BEAM188
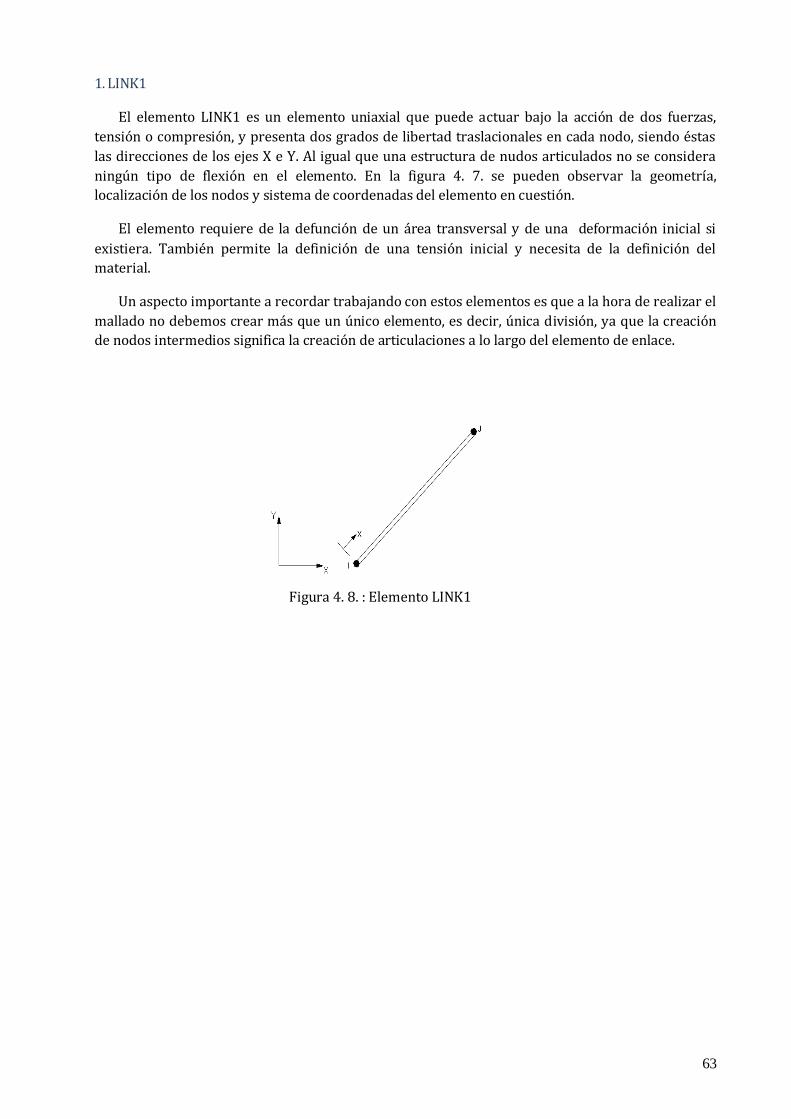
63
1. LINK1
El elemento LINK1 es un elemento uniaxial que puede actuar bajo la acción de dos fuerzas,
tensión o compresión, y presenta dos grados de libertad traslacionales en cada nodo, siendo éstas
las direcciones de los ejes X e Y. Al igual que una estructura de nudos articulados no se considera
ningún tipo de flexión en el elemento. En la figura 4. 7. se pueden observar la geometría,
localización de los nodos y sistema de coordenadas del elemento en cuestión.
El elemento requiere de la defunción de un área transversal y de una deformación inicial si
existiera. También permite la definición de una tensión inicial y necesita de la definición del
material.
Un aspecto importante a recordar trabajando con estos elementos es que a la hora de realizar el
mallado no debemos crear más que un único elemento, es decir, única división, ya que la creación
de nodos intermedios significa la creación de articulaciones a lo largo del elemento de enlace.
Figura 4. 8. : Elemento LINK1
64
5. Casos a Estudiar
5. 1 INTRODUCCIÓN
En este capítulo pasaremos a la recopilación y análisis de resultados obtenidos del desarrollo y
ejecución del proyecto. Antes de centrarnos en el análisis y comparación de resultados vamos a
presentar la geometría de los modelos que se han creado para la simulación del problema mediante
ANSYS, siendo además, el mismo problema resuelto siguiendo los modelos teórico y normativos
mencionados en el Capítulo 3.
5. 2 EJEMPLO 1 : SOPORTE COMPUESTO ENLAZADO EN
CELOSÍA (PROBLEMA 2D)
5. 2. 1 Geometría
Para el estudio del problema plano hemos creado un soporte compuesto con un único plano de
enlace. Como se ha mencionado anteriormente en el Capítulo 3, se trata de un pilar compuesto
triangulado, es decir, los enlaces unen los cordones en disposición de celosía.
Tabla de datos geométricos:
Teniendo en cuenta los datos proporcionados en la tabla y consultando cualquier catálogo de
perfiles laminados, se ha usado en este caso el de la empresa “ArcelorMittal”, usaremos un perfil
del tipo IPE 200. Siendo este uno de los mas comunes en la construcción de estructuras de esta
tipología y además de perfectas dimensiones para el análisis a realizar.
Como enlaces usaremos perfiles planos rectangulares de dimensiones h x b, siendo éstas 12 x
60 mm respectivamente.
La geometría y condiciones de contorno que impondremos en este modelo encuentran su
justificación en lo que queremos estudiar. Mediante la resolución de este primer problema, plano,
lo que buscaremos es conocer el comportamiento de la estructura cuando el pandeo se produce
dentro de su propio plano.
1350 150 28.5 142 varios
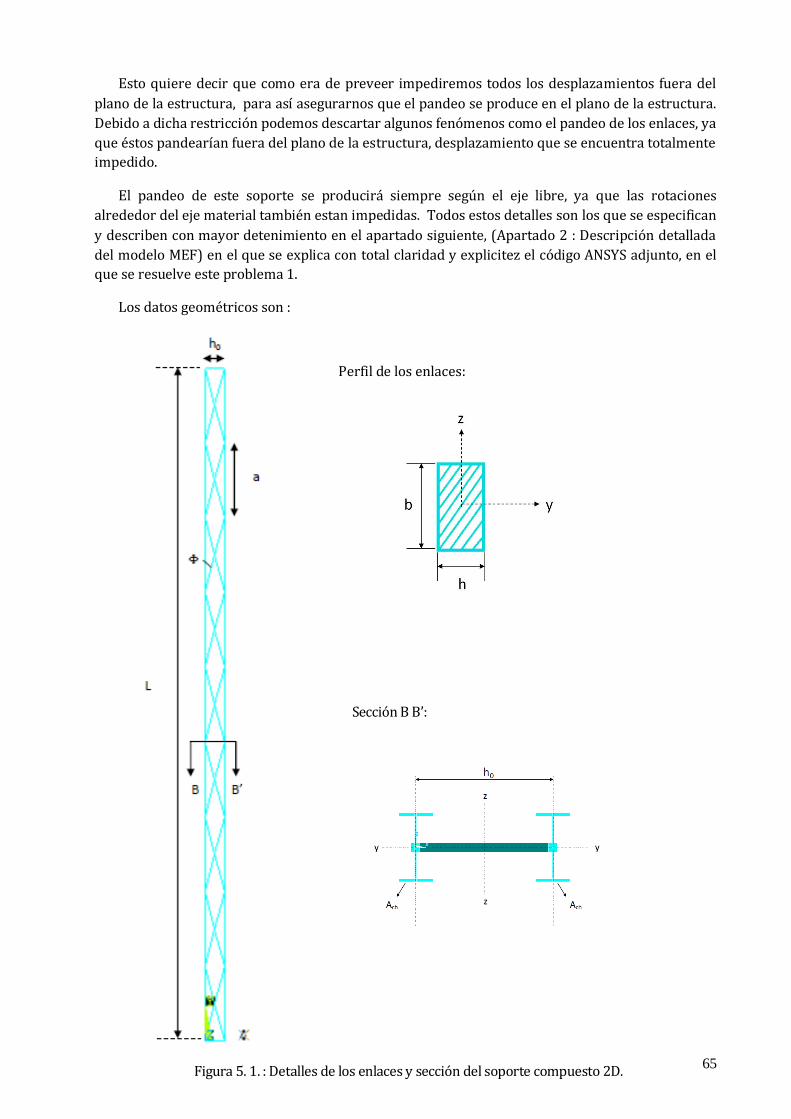
65
Esto quiere decir que como era de preveer impediremos todos los desplazamientos fuera del
plano de la estructura, para así asegurarnos que el pandeo se produce en el plano de la estructura.
Debido a dicha restricción podemos descartar algunos fenómenos como el pandeo de los enlaces, ya
que éstos pandearían fuera del plano de la estructura, desplazamiento que se encuentra totalmente
impedido.
El pandeo de este soporte se producirá siempre según el eje libre, ya que las rotaciones
alrededor del eje material también estan impedidas. Todos estos detalles son los que se especifican
y describen con mayor detenimiento en el apartado siguiente, (Apartado 2 : Descripción detallada
del modelo MEF) en el que se explica con total claridad y explicitez el código ANSYS adjunto, en el
que se resuelve este problema 1.
Los datos geométricos son :
Sección B B’:
Perfil de los enlaces:
Figura 5. 1. : Detalles de los enlaces y sección del soporte compuesto 2D.
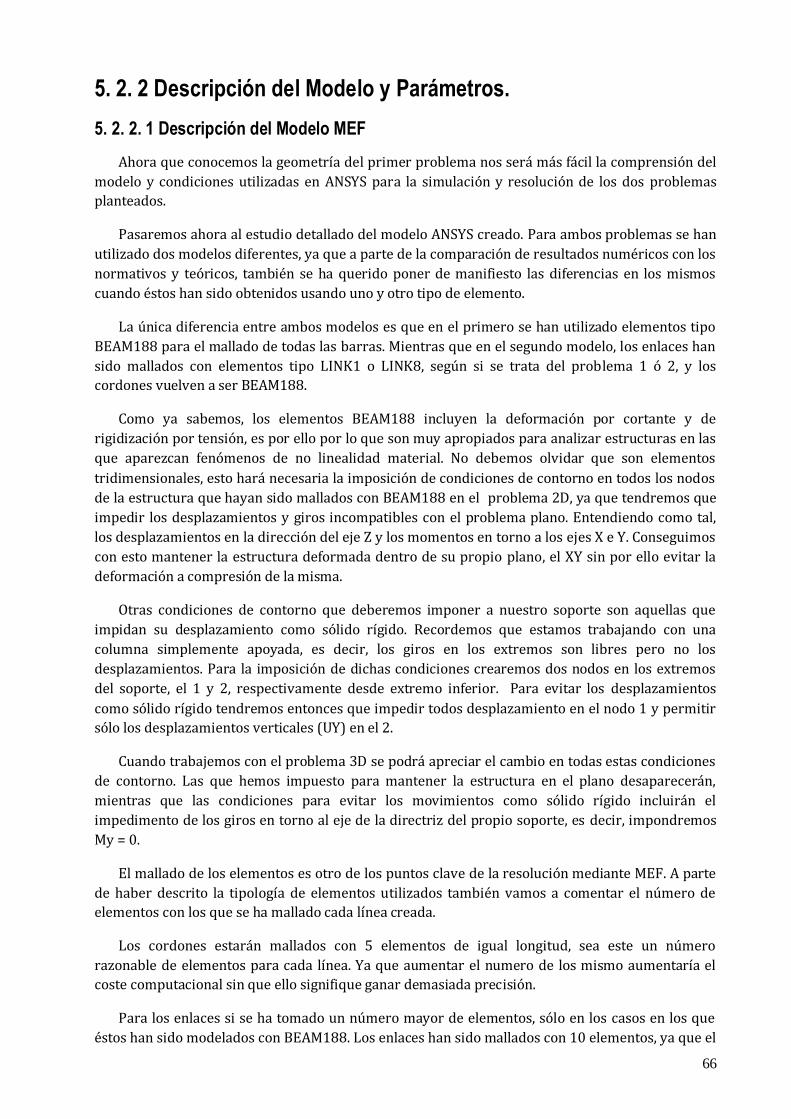
66
5. 2. 2 Descripción del Modelo y Parámetros.
5. 2. 2. 1 Descripción del Modelo MEF
Ahora que conocemos la geometría del primer problema nos será más fácil la comprensión del
modelo y condiciones utilizadas en ANSYS para la simulación y resolución de los dos problemas
planteados.
Pasaremos ahora al estudio detallado del modelo ANSYS creado. Para ambos problemas se han
utilizado dos modelos diferentes, ya que a parte de la comparación de resultados numéricos con los
normativos y teóricos, también se ha querido poner de manifiesto las diferencias en los mismos
cuando éstos han sido obtenidos usando uno y otro tipo de elemento.
La única diferencia entre ambos modelos es que en el primero se han utilizado elementos tipo
BEAM188 para el mallado de todas las barras. Mientras que en el segundo modelo, los enlaces han
sido mallados con elementos tipo LINK1 o LINK8, según si se trata del problema 1 ó 2, y los
cordones vuelven a ser BEAM188.
Como ya sabemos, los elementos BEAM188 incluyen la deformación por cortante y de
rigidización por tensión, es por ello por lo que son muy apropiados para analizar estructuras en las
que aparezcan fenómenos de no linealidad material. No debemos olvidar que son elementos
tridimensionales, esto hará necesaria la imposición de condiciones de contorno en todos los nodos
de la estructura que hayan sido mallados con BEAM188 en el problema 2D, ya que tendremos que
impedir los desplazamientos y giros incompatibles con el problema plano. Entendiendo como tal,
los desplazamientos en la dirección del eje Z y los momentos en torno a los ejes X e Y. Conseguimos
con esto mantener la estructura deformada dentro de su propio plano, el XY sin por ello evitar la
deformación a compresión de la misma.
Otras condiciones de contorno que deberemos imponer a nuestro soporte son aquellas que
impidan su desplazamiento como sólido rígido. Recordemos que estamos trabajando con una
columna simplemente apoyada, es decir, los giros en los extremos son libres pero no los
desplazamientos. Para la imposición de dichas condiciones crearemos dos nodos en los extremos
del soporte, el 1 y 2, respectivamente desde extremo inferior. Para evitar los desplazamientos
como sólido rígido tendremos entonces que impedir todos desplazamiento en el nodo 1 y permitir
sólo los desplazamientos verticales (UY) en el 2.
Cuando trabajemos con el problema 3D se podrá apreciar el cambio en todas estas condiciones
de contorno. Las que hemos impuesto para mantener la estructura en el plano desaparecerán,
mientras que las condiciones para evitar los movimientos como sólido rígido incluirán el
impedimento de los giros en torno al eje de la directriz del propio soporte, es decir, impondremos
My = 0.
El mallado de los elementos es otro de los puntos clave de la resolución mediante MEF. A parte
de haber descrito la tipología de elementos utilizados también vamos a comentar el número de
elementos con los que se ha mallado cada línea creada.
Los cordones estarán mallados con 5 elementos de igual longitud, sea este un número
razonable de elementos para cada línea. Ya que aumentar el numero de los mismo aumentaría el
coste computacional sin que ello signifique ganar demasiada precisión.
Para los enlaces si se ha tomado un número mayor de elementos, sólo en los casos en los que
éstos han sido modelados con BEAM188. Los enlaces han sido mallados con 10 elementos, ya que el

67
fallo a nivel local es más delicado que el global y además porque se comprueba que la precisión si
aumenta considerablemente al aumentar el número de elementos.
Sin duda, una de las características más importantes del código es la creación de elementos
rígidos en los que aplicaremos las fuerzas de compresión. Es con este fin con el que usaremos el
comando “CERIG” habiendo previamente creado elementos entre los nodos de las líneas
horizontales en los extremos del soporte. Este comando nos permite elegir un nodo “master” y unos
“slaves” de manera que exista acoplamiento de los desplazamientos y momentos deseados por
parte de los “slaves” al “master” . Dicho de otra manera, el comando CERIG permite establecer un
nodo a partir del cual el resto de nodos elegidos tengan sus desplazamientos y momentos
acoplados al anterior, tal y como sucede entre los nodos de un sólido rígido, entre los cuales existe
una relación de acoplamiento debido a que consideramos el sólido rígido indeformable.
Haciendo uso de este mismo comando es como lograremos dotar de rigidez a los cordones en el
modelo 3D. Como podremos observar para modelar el problema 3D se han creado las líneas en las
que estarán situados los centros de masa de los perfiles y a una distancia de la mitad del canto de
éstos , los planos de enlace. Para que la relación entre los nodos que modelan los centros de
masa y los nodos extremos donde conectan los perfiles con los planos de enlace, sea rígida, y por
tanto lo más cercano a la realidad posible, volveremos a hacer uso del comando “CERIG” .
Al igual que en el caso 2D, el comando CERIG exige la elección de un nodo “master” y sus
correspondientes “slaves”. Tomaremos en esta ocasión como nodo principal el centro de masa de
los perfiles, siendo los que sufrirán el acoplamiento los puntos de enlace entre cordones.
Tal y como hicimos en el modelo anterior, en el modelo tridimensional crearemos también
zonas completamente rígidas en los extremos, donde poder aplicar las cargas sin que la sección
deforme.
Por último, como detalle descriptivo del problema resumiremos las propiedades del material
escogido para modelar la estructura. Se trata de un acero estructural S235 con las siguientes
propiedades:
Módulo de Elasticidad :
Módulo de rigidez :
Coeficiente de Poisson :
Densidad :
Tensión del límite elástico :
Antes de centrarnos en la descripción de los parámetros que utilizaremos para el análisis de
resultados, debemos destacar uno de los aspectos más importantes de la implementación con
ANSYS. Esta herramienta informática no entiende de unidades es por eso por lo que tenemos que
ser muy cuidadosos introduciendo los datos. Sobre todo, usar siempre unidades acordes. Como se
podrá observar en los códigos adjuntos, en este proyecto trabajaremos en ANSYS introduciendo las
medidas en mm y las fuerzas en N, eso quiere decir por tanto que los resultados serán devueltos en
mm y N.
E 2. kN m2
G . kN m2
.3
. 5 kg m3
235 Pa
68
5. 2. 2. 2 Descripción de los Parámetros.
Antes de profundizar de pleno en el análisis de resultados comentaremos brevemente los
parámetros con los que nos vamos a encontrar y que son los que harán posible la comparación
entre los diferentes casos.
En ambos casos, tanto en el unidimensional como en el tridimensional buscaremos poder
comparar el pandeo del soporte cuando se trata de una columna perfecta y cuando pudieran
aparecer en ellas ciertas imperfecciones. Ya se ha comentado a lo largo del proyecto que la
imperfección que contemplaremos será la geométrica, pudiendo en un futuro usar este mismo
estudio como punto de partida para el estudio y consideración también de la imperfección material.
Para una mejor comprensión de los resultados, lo que haremos será una representación
conjunta de las cargas críticas de pandeo en los diferentes casos. Se representarán en una misma
gráfica los resultados proporcionados por la Teoría, por el MEF en Análisis Lineal y también, los
resultados del MEF de un Análisis No Lineal.
Es decir, estudiaremos el comportamiento de la columna perfecta para tomar estos valores
como referencia, para posteriormente pasar al estudio del soporte sólo con imperfección
geométrica. Centrando nuestra atención en las diferencias entre los resultados obtenidos, buscando
siempre determinar la holgura entre los diferentes métodos empleados, pero también haciendo
resaltar la concordancia entre todos ellos.
Cada uno de los resultados difiere, como ya hemos comentado, debido a que para cada uno de
los casos estudiados la distancia entre cordones será diferente mientras el resto de
parámetros permanecerá constante. Pasemos así a definir el primer parámetro,
Siendo,
la carga crítica de pandeo GLOBAL de la estructura.
la carga crítica de pandeo a nivel LOCAL.
Hay que puntualizar que ambos valores de las cargas críticas son los correspondientes a la
determinación teórica según un modelo elástico del problema. Podremos observar a continuación
que cada uno de los casos estudiados se corresponde con un valor de diferente.
Buscaremos estudiar la evolución del soporte frente a las cargas de compresión a las que irá
siendo sometido hasta alcanzar la carga critica. Para ello vamos a representar el desplazamiento del
nodo central de la estructura frente a las reacciones en el extremo del mismo. Es así como pasamos
a definir los dos parámetros de los que haremos uso para este cometido. Vamos a representar
frente a
Siendo,
la carga axil aplicada.
la carga crítica de pandeo a nivel LOCAL.
desplazamiento del nodo central de la estructura.
longitud total del soporte.

69
Al igual que los desplazamientos y fuerza aplicadas van adimensionalizadas, todas las cargas
críticas de pandeo local y global que tomaremos como referencia, también irán adimensionalizadas.
Usaremos para ello, una vez más, el valor de la carga crítica de pandeo a nivel local según la Teoría,
5. 2. 1 Esquemas de Resolución
Los resultados que a continuación pasamos a presentar han sido obtenidos haciendo uso de las
expresiones (3.4. 1 y 3.4. 5) ya presentadas y justificadas en el Capítulo 3, que como ya se había
especificado en el mismo, corresponden con un método de cálculo teórico propuesto por la teoría
[5].
Para llevar a cabo el cálculo iterativo hasta hallar los valores de deseados se ha implementado
un código de Matlab muy sencillo, en el que tan sólo con introducir los distintos valores de
obtenemos el valor del resto de parámetros.
No debemos olvidar que estos son resultados producto del análisis de un soporte compuesto
ideal, es decir, aun no han sido consideradas las imperfecciones. Serán pues estos valores los que
nos servirán como referencia para el análisis posterior mediante gráficos.
Pasamos a continuación a la resolución manual del problema según los diferentes enfoques,
Teórico y Normativo para pasar posteriormente a la comparación de dichos resultados con los
obtenidos mediante la resolución numérica MEF. Recordemos que la finalidad de dicho análisis es
profundizar en el comportamiento del soporte según los diferentes análisis de pandeo realizados y
también, llegar a poner de manifiesta la holgura con la que trabajamos al diseñar dichos soportes
mediante métodos teóricos y normativos.
Tabla de los distintos valores de según
27.00 10.204 1048.7416 2616.1031 0.4
38.26 14.309 2094.6189 2616.1031 0.8
43.00 15.996 2638.2959 2616.1031 1.0
48.95 18.073 3405.1505 2616.1031 1.3
54.40 19.934 4188.0171 2616.1031 1.6

70
5.2. 1. 1 Resolución Teórica
En este epígrafe haremos uso de las expresiones presentadas en el Capítulo 3 [5] para resolver
el problema según el método propuesto por el Paper basado en la teoría clásica del pandeo.
Lo primero que debemos hacer, es calcular los parámetros característicos de la sección, que nos
permitirán posteriormente el cálculo de las cargas críticas de pandeo buscadas, tanto la global
como la local.
Cuando ya hemos obtenido los valores de la inercia efectiva y de la resistencia a cizalladura
podemos pasar a la determinación de las cargas críticas de pandeo, local y global.
Según podemos apreciar en la expresión siguiente, para la determinación de la carga critica de
pandeo global, necesitamos primero determinar la carga crítica de pandeo según la Teoría de Euler,
es decir, la conocida como la Carga Crítica de Euler.
Siendo la carga crítica de Euler,

71
Podemos observar cómo estos valores coinciden con los recogidos en la tabla de la página 71,
cuyos valores habían sido obtenido mediante el uso de un código de Matlab basado en esta misma
teoría[5].
El procedimiento es análogo para todos los casos, sólo habría que introducir los diferentes
valores de y del ángulo para ir obteniendo los valores de las cargas críticas local y global según
la separación entre cordones.
5. 2. 1. 2 Eurocódigo 3 (EAE)
Para resolver el problema haciendo uso de otro modelo no numérico con el que poder
contrastar resultados, tantos los de la teoría como los numéricos obtenidos mediante MEF,
haremos uso del procedimiento de comprobación de soportes compuestos propuesto por el
Eurocódigo3 (EAE), y que ya ha sido desarrollado en el Capítulo 3 de este documento.
La expresión que debemos usar es la (3.3. 1) del Capítulo 3, para ello debemos primero calcular
los parámetros geométricos de la sección.
Recordando que estamos en el caso unidemensional, en el que el eje de mayor esbeltez será el
de pandeo, haremos todos los cálculos para el pandeo alrededor del eje débil, el Z, ya que el pandeo
fuera del plano está impedido.
Donde es el radio de giro de la sección, definido:
Esto quiere decir que la resistencia a compresión de nuestro soporte, según el EC3 es de 492,62
kN. Para que el soporte sea resistente al pandeo ante cargas de compresión según la normativa,
Curva b

72
deberá cumplir con que dicha carga de resistencia a compresión sea menor que el axil de
compresión en los cordones del soporte.
Haciendo uso de las expresiones expuestas en el Capítulo 3, deberá cumplirse la condición se
seguridad estructural ante el fenómeno del pandeo (expresión 3.3. 4) ,
para ello debemos determinar:
En esta ecuación no podemos dejar pasar la identificación del factor de amplificación, del que ya habíamos hablado en capítulos anteriores recorriendo la teoría clásica del pandeo. Concretamente en el Capítulo 2, la expresión (2.3. 7). Rescribiendo la ecuación de manera semejante a la (2.3. 7):
Haciendo uso de la condición anterior, buscaremos hallar el valor de la carga NEd que provocaría
el colapso de la estructura. Siguiendo el procedimiento ,
Siendo ésta última la ecuación a resolver para hallar el valor de P, la carga de colapso. Para
revolser esta ecuación seguiremos un proceso iterativo.
Para nuestro caso, soporte compuesto triangulado con un único plano de enlace, el valor de la resistencia a cizalladura viene definido de la forma siguiente,
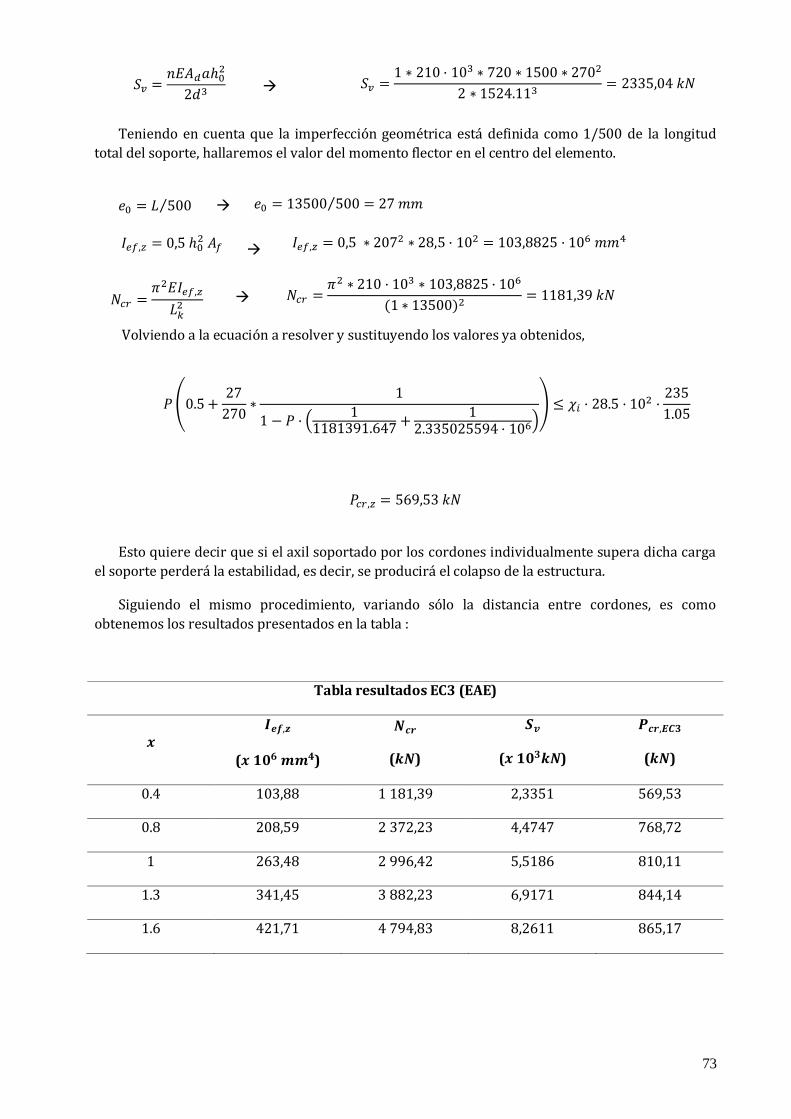
73
Teniendo en cuenta que la imperfección geométrica está definida como 1/500 de la longitud
total del soporte, hallaremos el valor del momento flector en el centro del elemento.
Volviendo a la ecuación a resolver y sustituyendo los valores ya obtenidos,
Esto quiere decir que si el axil soportado por los cordones individualmente supera dicha carga
el soporte perderá la estabilidad, es decir, se producirá el colapso de la estructura.
Siguiendo el mismo procedimiento, variando sólo la distancia entre cordones, es como
obtenemos los resultados presentados en la tabla :
Tabla resultados EC3 (EAE)
( )
( )
( )
( )
0.4 103,88 1 181,39 2,3351 569,53
0.8 208,59 2 372,23 4,4747 768,72
1 263,48 2 996,42 5,5186 810,11
1.3 341,45 3 882,23 6,9171 844,14
1.6 421,71 4 794,83 8,2611 865,17
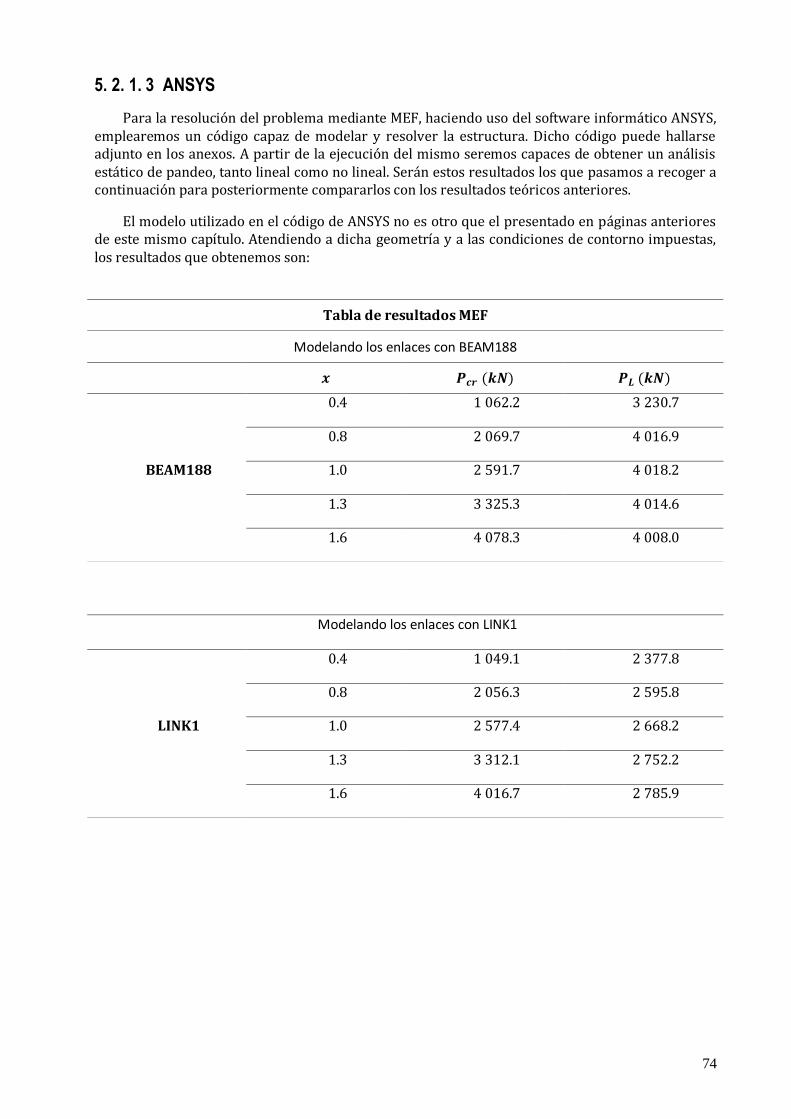
74
5. 2. 1. 3 ANSYS
Para la resolución del problema mediante MEF, haciendo uso del software informático ANSYS, emplearemos un código capaz de modelar y resolver la estructura. Dicho código puede hallarse adjunto en los anexos. A partir de la ejecución del mismo seremos capaces de obtener un análisis estático de pandeo, tanto lineal como no lineal. Serán estos resultados los que pasamos a recoger a continuación para posteriormente compararlos con los resultados teóricos anteriores.
El modelo utilizado en el código de ANSYS no es otro que el presentado en páginas anteriores de este mismo capítulo. Atendiendo a dicha geometría y a las condiciones de contorno impuestas, los resultados que obtenemos son:
Tabla de resultados MEF
Modelando los enlaces con BEAM188
BEAM188
0.4 1 062.2 3 230.7
0.8 2 069.7 4 016.9
1.0 2 591.7 4 018.2
1.3 3 325.3 4 014.6
1.6 4 078.3 4 008.0
Modelando los enlaces con LINK1
LINK1
0.4 1 049.1 2 377.8
0.8 2 056.3 2 595.8
1.0 2 577.4 2 668.2
1.3 3 312.1 2 752.2
1.6 4 016.7 2 785.9

75
5. 2. 3 Análisis de Resultados
0 0.005 0.01 0.015 0.02 0.025 0.030
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 4: x = 1.3
w/L
P/P
l
0 0.005 0.01 0.015 0.02 0.025 0.030
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 5: x = 1.6
w/L
P/P
l
0 0.005 0.01 0.015 0.02 0.025 0.030
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 1: x = 0.4
w/L
P/P
l
0 0.005 0.01 0.015 0.02 0.025 0.030
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 3: x = 1
w/L
P/P
l
0 0.005 0.01 0.015 0.02 0.025 0.030
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 2: x = 0.8
w/L
P/P
l
0 0.005 0.01 0.015 0.02 0.0250
5
10
15
20
25
30
MEF Lineal : Carga Crítica GLOBAL
MEF Lineal : Carga Crítica LOCAL
Teoría : Carga Crítica GLOBAL
Teoría : Carga Crítica LOCAL
Figura 5. 2. : Gráficas comparativas para los distintos valores de x haciendo uso de BEAM188
MEF No Lineal
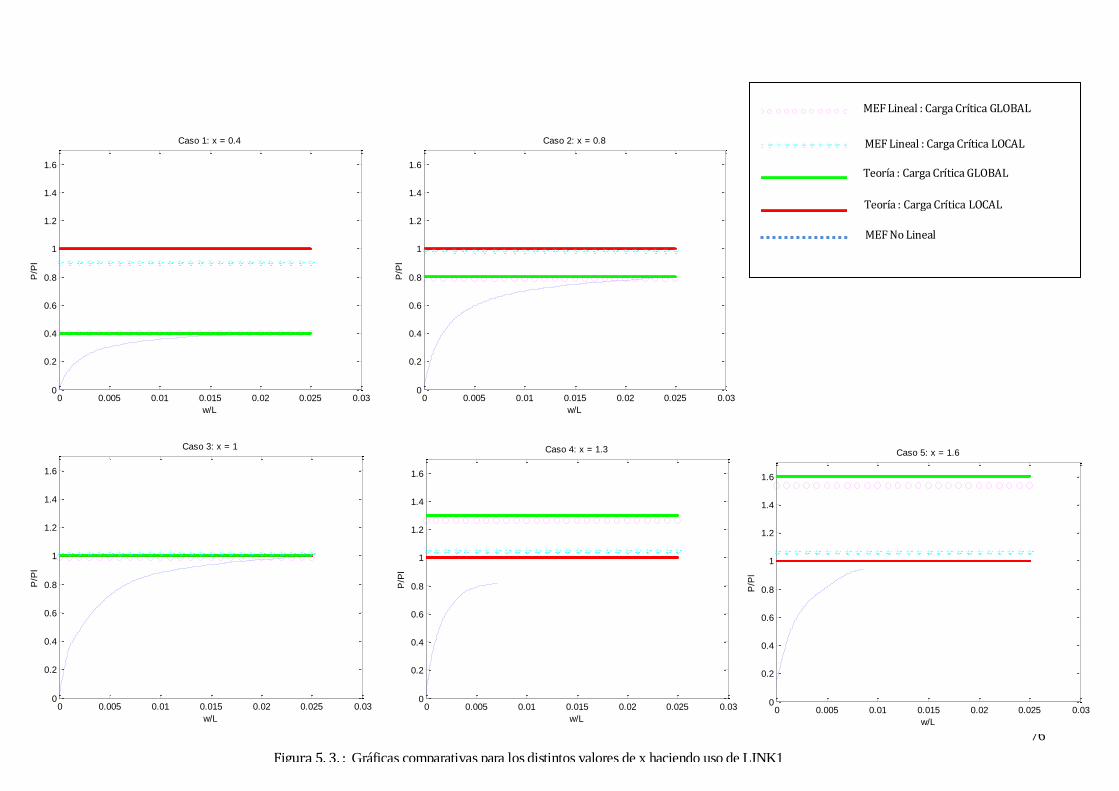
76
0 0.005 0.01 0.015 0.02 0.025 0.030
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 5: x = 1.6
w/L
P/P
l
0 0.005 0.01 0.015 0.02 0.025 0.030
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 1: x = 0.4
w/L
P/P
l
0 0.005 0.01 0.015 0.02 0.025 0.030
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 2: x = 0.8
w/L
P/P
l
0 0.005 0.01 0.015 0.02 0.025 0.030
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 3: x = 1
w/L
P/P
l
0 0.005 0.01 0.015 0.02 0.025 0.030
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 4: x = 1.3
w/L
P/P
l
Figura 5. 3. : Gráficas comparativas para los distintos valores de x haciendo uso de LINK1
0 0.005 0.01 0.015 0.02 0.0250
5
10
15
20
25
30
MEF Lineal : Carga Crítica GLOBAL
MEF Lineal : Carga Crítica LOCAL
Teoría : Carga Crítica GLOBAL
Teoría : Carga Crítica LOCAL
MEF No Lineal

77
5. 2. 3 .1 Caso 1 : x = 0.4
Figura 5. 4 : Gráfica comparativa para el caso 1.
En el caso 1 nos encontramos con un soporte compuesto de una esbeltez considerable, ya que la
distancia entre los cordones es de tan sólo 270 mm . Es por eso por lo que como resultado debemos
esperar el colapso de la estructura por pandeo global.
Esto puede verificarse observando la figura adjunta, en la que como podemos observar el
soporte alcanza el colapso cuando el valor de la carga es el de la carga crítica global de pandeo.
Recordando que la línea azul discontinua representa el comportamiento de la estructura según un
análisis con no linealidad geométrica mediante MEF, no cabía esperar que el valor de la carga
soportada por la columna en este caso superara el de la carga critica lineal. Ya que como hemos
visto a lo largo del desarrollo del proyecto, las imperfecciones y no linealidad son desfavorables a la
resistencia ante cargas de compresión para los soportes compuestos.
Observando la figura, es muy importante destacar también que el valor de la carga crítica de
pandeo GLOBAL es prácticamente la misma a pesar de haber sido determinada por diferentes
métodos de resolución.
Tanto la teoría como el MEF predecían el fallo de la estructura con un valor de carga crítica
global de 0.4 veces el valor de la carga crítica local. Esto quiere decir que el soporte, tanto
teóricamente como numéricamente presenta una resistencia a pandeo mayor en el eje Y que en el Z.
Esto prueba que cuando se trata de un caso de pandeo uniforme, es decir, en el que no se
presenten anomalías en el comportamiento del soporte, tanto la teoría como el MEF predicen
cargas similares. Demuestra esto entonces que la teoría es de aplicación adecuada en caso de
querer resolver un problema de estabilidad sin tener en cuenta posibles no linealidades.
0 0.005 0.01 0.015 0.02 0.025 0.030
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 1: x = 0.4
w/L
P/P
l

78
Mediante las imágenes presentadas a continuación, apreciaremos de forma explícita los
diferentes modos de pandeo sufridos por la estructura en este caso, en el que la distancia entre
cordones es de 270 mm.
Figura 5. 5 : Primer modo de pandeo (a) columna deformada y (b) columna deformada e indeformada.
Esta imagen es la correspondiente al pandeo global de la estructura, es fácilmente apreciable la desviación que el eje central de la misma sufre con respecto a su vertical. Confiere así una estructura curva en su conjunto, evitando el fallo de los cordones entre los puntos de enlace, es decir, evitando el colapso por pandeo local.
Si continuamos aumentando la carga, podemos apreciar como la resistencia de los cordones
disminuye, es por eso por lo que la deformación se hace mas grande, llegando a alcanzar grandes
desplazamientos. En la siguiente figura se aprecia el segundo modo de pandeo, todavía asociado a
un pandeo global, en el que los cordones siguen sin haber deformado entre puntos de enlace.
Por último, comentar la imagen en la que se aprecia cómo el soporte alcanza el modo 3,
asociado al pandeo local. Siendo la carga de pandeo ahora muy superior, los cordones no son
capaces de resistir la deformación y carga, es por eso por lo que finalmente la estructura alcanza
una configuración de pandeo de los cordones entre puntos de enlace. Debido a que el análisis
registrado en la grafica 5. 4, es el comportamiento de la estructura hasta alcanzar la carga critica y,
como hemos visto la carga de colapso es la de pandeo global, el hecho de que la columna alcance
esta configuración no es apreciable en la misma, sólo en el estudio gráfico de las deformadas.

79
Figura 5. 6 : Segundo modo de pandeo (a) columna deformada y (b) columna deformada e indeformada.
Figura 5. 7 : Tercer modo de pandeo (a) columna deformada y (b) columna deformada e indeformada.
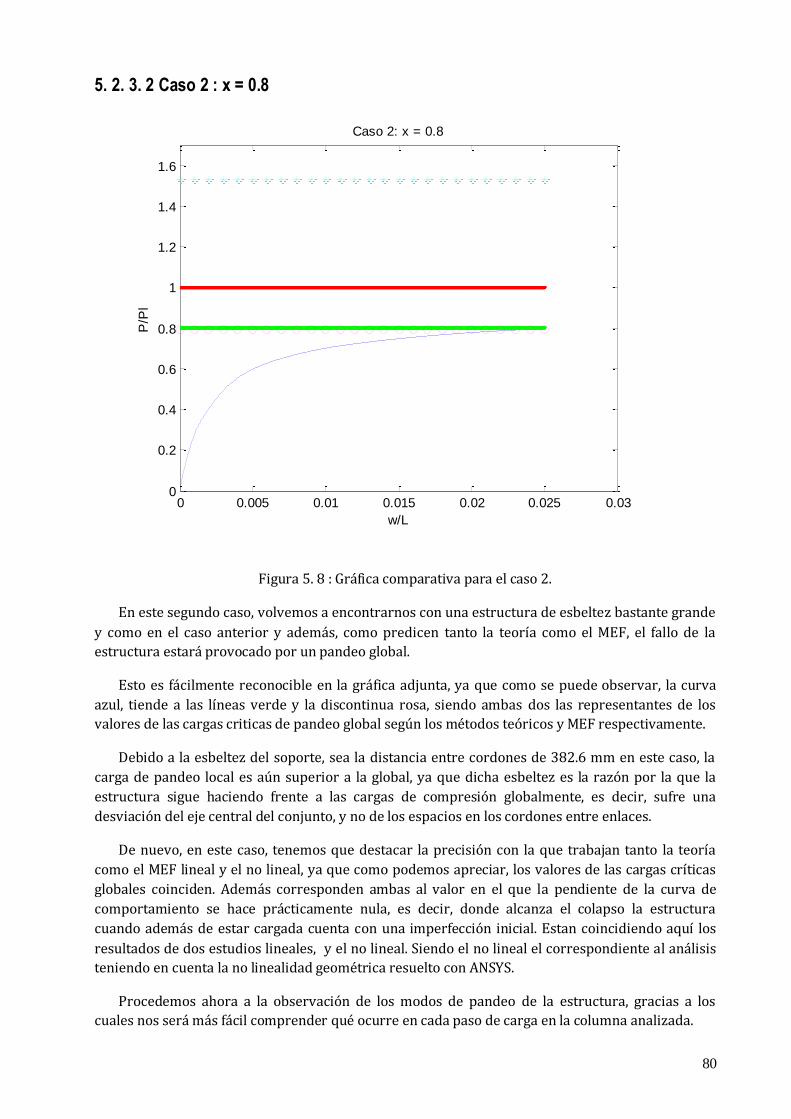
80
5. 2. 3. 2 Caso 2 : x = 0.8
Figura 5. 8 : Gráfica comparativa para el caso 2.
En este segundo caso, volvemos a encontrarnos con una estructura de esbeltez bastante grande
y como en el caso anterior y además, como predicen tanto la teoría como el MEF, el fallo de la
estructura estará provocado por un pandeo global.
Esto es fácilmente reconocible en la gráfica adjunta, ya que como se puede observar, la curva
azul, tiende a las líneas verde y la discontinua rosa, siendo ambas dos las representantes de los
valores de las cargas criticas de pandeo global según los métodos teóricos y MEF respectivamente.
Debido a la esbeltez del soporte, sea la distancia entre cordones de 382.6 mm en este caso, la
carga de pandeo local es aún superior a la global, ya que dicha esbeltez es la razón por la que la
estructura sigue haciendo frente a las cargas de compresión globalmente, es decir, sufre una
desviación del eje central del conjunto, y no de los espacios en los cordones entre enlaces.
De nuevo, en este caso, tenemos que destacar la precisión con la que trabajan tanto la teoría
como el MEF lineal y el no lineal, ya que como podemos apreciar, los valores de las cargas críticas
globales coinciden. Además corresponden ambas al valor en el que la pendiente de la curva de
comportamiento se hace prácticamente nula, es decir, donde alcanza el colapso la estructura
cuando además de estar cargada cuenta con una imperfección inicial. Estan coincidiendo aquí los
resultados de dos estudios lineales, y el no lineal. Siendo el no lineal el correspondiente al análisis
teniendo en cuenta la no linealidad geométrica resuelto con ANSYS.
Procedemos ahora a la observación de los modos de pandeo de la estructura, gracias a los
cuales nos será más fácil comprender qué ocurre en cada paso de carga en la columna analizada.
0 0.005 0.01 0.015 0.02 0.025 0.030
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 2: x = 0.8
w/L
P/P
l

81
Igual que en el caso anterior, el primer modo de pandeo está asociado al pandeo global de la
estructura, es por eso por lo que la única deformación que sufre el soporte es una curvatura en su
eje longitudinal. Hecho que podemos apreciar en las dos figuras siguientes, la primera en la que
sólo tenemos la deformada y la segunda en la que además de la deformada tenemos el eje de la
estructura en su configuración indeformada.
Figura 5. 9 : Primer modo de pandeo (a) columna deformada y (b) columna deformada e indeformada.
Al aumentar la carga la resistencia de los cordones disminuye, siendo la estructura incapaz de
mantener la configuración anterior y en este caso, incapaz de mantenerse indeformada entre los
puntos de arriostramiento. Esto quiere decir que al aumentar la carga sobre el valor de la carga
crítica obtenida, estaremos provocando el fallo por pandeo local de la estructura.
Que la estructura pandee localmente significa que la desviación del eje central será ahora
sufrida por los cordones en los tramos contenidos entre puntos de enlace, ya que en dichos puntos
se supone reforzada la estructura y por tanto, disminuidos los desplazamientos.
El siguiente modo de pandeo representado corresponde al segundo aumento de carga, es decir,
si aumentamos la carga critica de pandeo global estamos provocando el colapso por pandeo local
de la columna, los cordones pierden la rigidez entre puntos de enlace y toman la configuración
deformada.
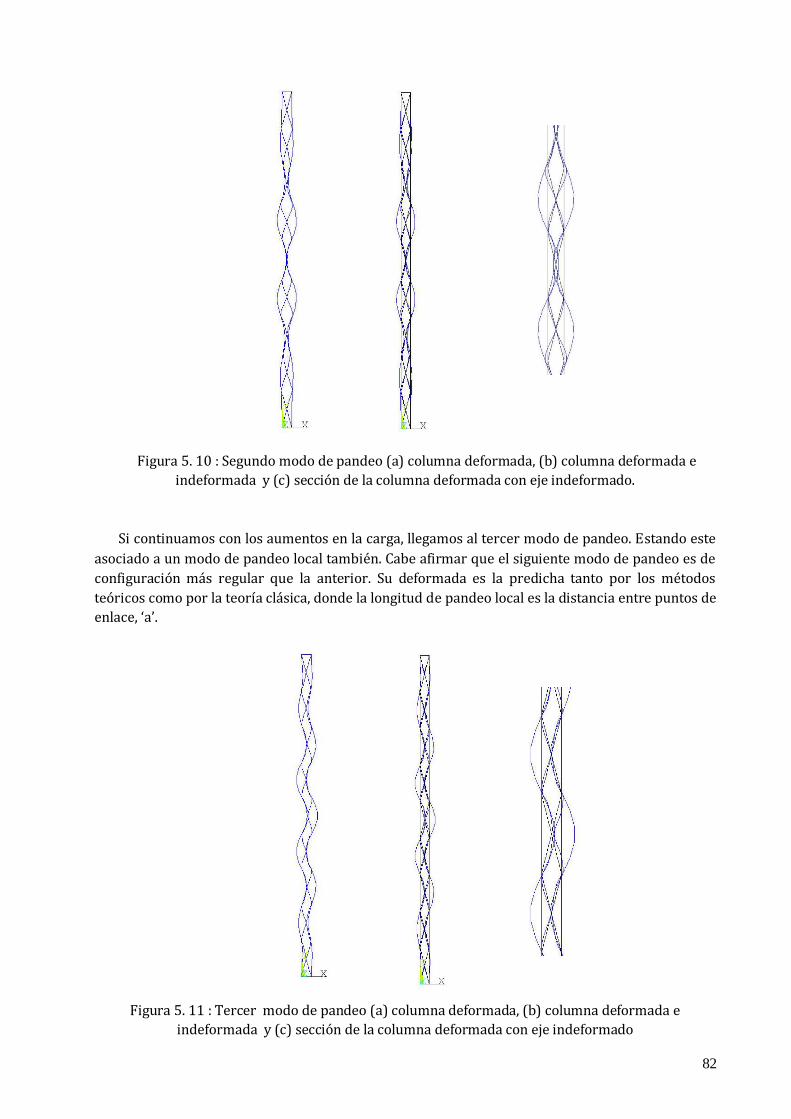
82
Figura 5. 10 : Segundo modo de pandeo (a) columna deformada, (b) columna deformada e
indeformada y (c) sección de la columna deformada con eje indeformado.
Si continuamos con los aumentos en la carga, llegamos al tercer modo de pandeo. Estando este
asociado a un modo de pandeo local también. Cabe afirmar que el siguiente modo de pandeo es de
configuración más regular que la anterior. Su deformada es la predicha tanto por los métodos
teóricos como por la teoría clásica, donde la longitud de pandeo local es la distancia entre puntos de
enlace, ‘a’.
Figura 5. 11 : Tercer modo de pandeo (a) columna deformada, (b) columna deformada e
indeformada y (c) sección de la columna deformada con eje indeformado
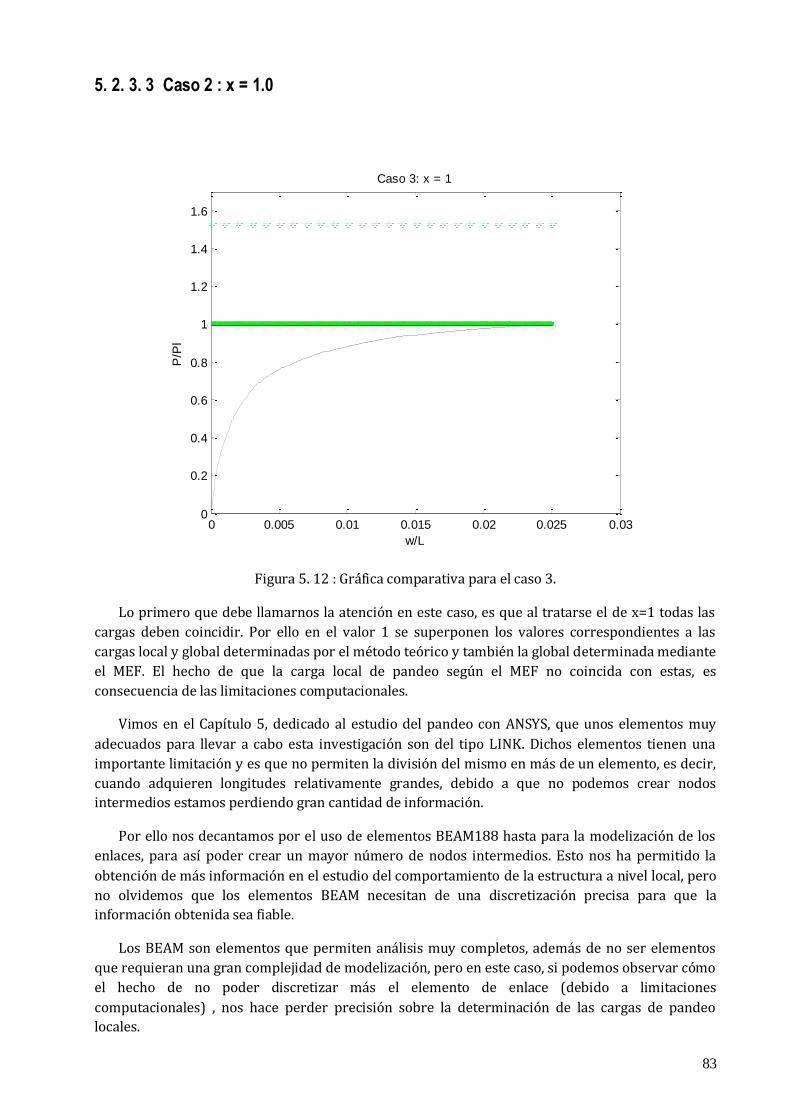
83
5. 2. 3. 3 Caso 2 : x = 1.0
Figura 5. 12 : Gráfica comparativa para el caso 3.
Lo primero que debe llamarnos la atención en este caso, es que al tratarse el de x=1 todas las
cargas deben coincidir. Por ello en el valor 1 se superponen los valores correspondientes a las
cargas local y global determinadas por el método teórico y también la global determinada mediante
el MEF. El hecho de que la carga local de pandeo según el MEF no coincida con estas, es
consecuencia de las limitaciones computacionales.
Vimos en el Capítulo 5, dedicado al estudio del pandeo con ANSYS, que unos elementos muy
adecuados para llevar a cabo esta investigación son del tipo LINK. Dichos elementos tienen una
importante limitación y es que no permiten la división del mismo en más de un elemento, es decir,
cuando adquieren longitudes relativamente grandes, debido a que no podemos crear nodos
intermedios estamos perdiendo gran cantidad de información.
Por ello nos decantamos por el uso de elementos BEAM188 hasta para la modelización de los
enlaces, para así poder crear un mayor número de nodos intermedios. Esto nos ha permitido la
obtención de más información en el estudio del comportamiento de la estructura a nivel local, pero
no olvidemos que los elementos BEAM necesitan de una discretización precisa para que la
información obtenida sea fiable.
Los BEAM son elementos que permiten análisis muy completos, además de no ser elementos
que requieran una gran complejidad de modelización, pero en este caso, si podemos observar cómo
el hecho de no poder discretizar más el elemento de enlace (debido a limitaciones
computacionales) , nos hace perder precisión sobre la determinación de las cargas de pandeo
locales.
0 0.005 0.01 0.015 0.02 0.025 0.030
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 3: x = 1
w/L
P/P
l
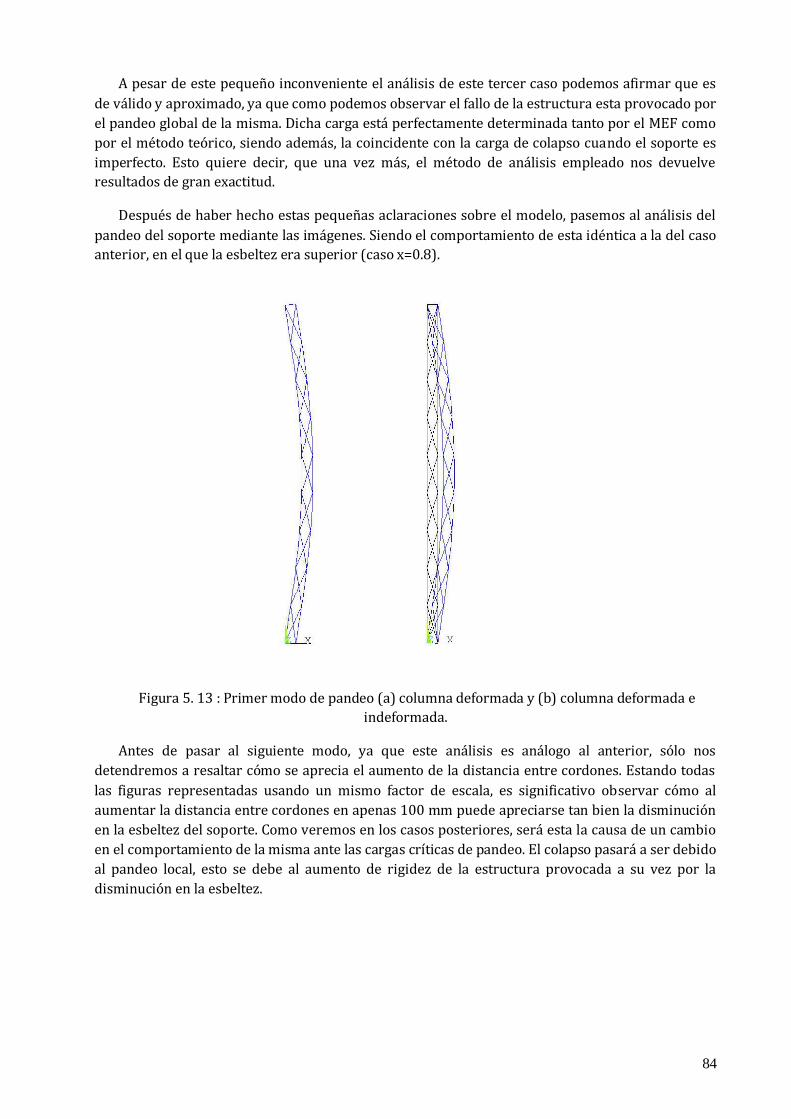
84
A pesar de este pequeño inconveniente el análisis de este tercer caso podemos afirmar que es
de válido y aproximado, ya que como podemos observar el fallo de la estructura esta provocado por
el pandeo global de la misma. Dicha carga está perfectamente determinada tanto por el MEF como
por el método teórico, siendo además, la coincidente con la carga de colapso cuando el soporte es
imperfecto. Esto quiere decir, que una vez más, el método de análisis empleado nos devuelve
resultados de gran exactitud.
Después de haber hecho estas pequeñas aclaraciones sobre el modelo, pasemos al análisis del
pandeo del soporte mediante las imágenes. Siendo el comportamiento de esta idéntica a la del caso
anterior, en el que la esbeltez era superior (caso x=0.8).
Figura 5. 13 : Primer modo de pandeo (a) columna deformada y (b) columna deformada e
indeformada.
Antes de pasar al siguiente modo, ya que este análisis es análogo al anterior, sólo nos
detendremos a resaltar cómo se aprecia el aumento de la distancia entre cordones. Estando todas
las figuras representadas usando un mismo factor de escala, es significativo observar cómo al
aumentar la distancia entre cordones en apenas 100 mm puede apreciarse tan bien la disminución
en la esbeltez del soporte. Como veremos en los casos posteriores, será esta la causa de un cambio
en el comportamiento de la misma ante las cargas críticas de pandeo. El colapso pasará a ser debido
al pandeo local, esto se debe al aumento de rigidez de la estructura provocada a su vez por la
disminución en la esbeltez.
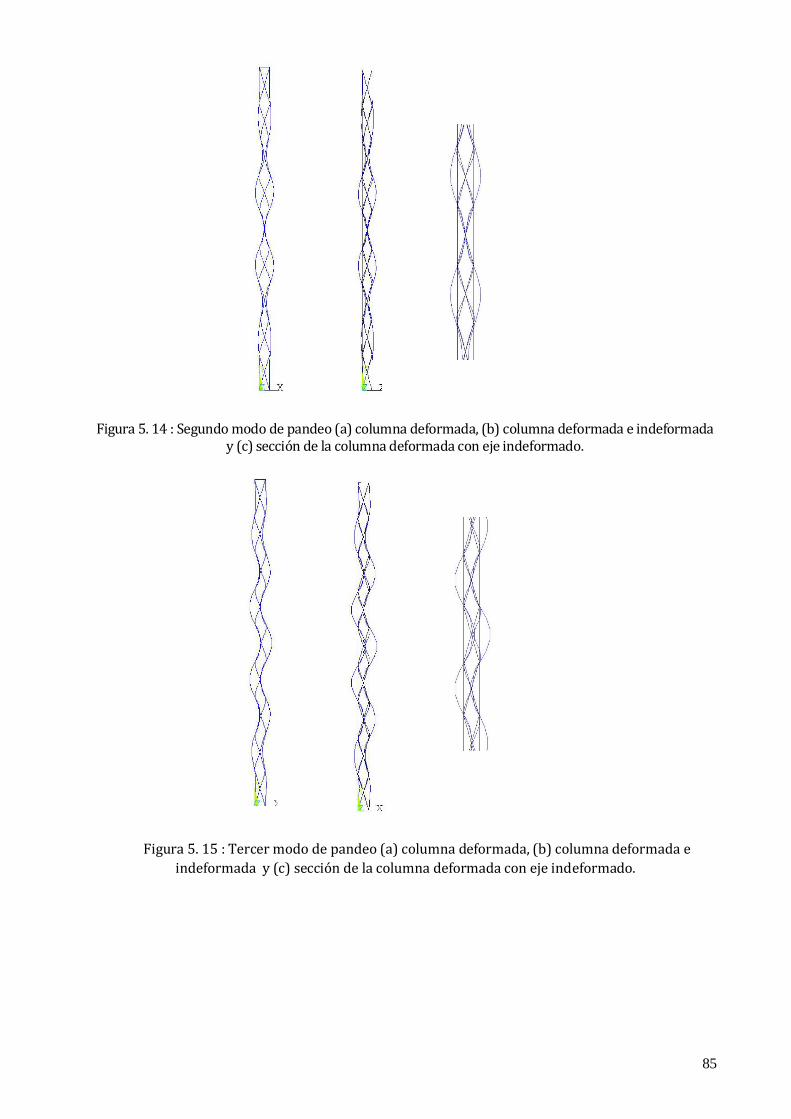
85
Figura 5. 14 : Segundo modo de pandeo (a) columna deformada, (b) columna deformada e indeformada y (c) sección de la columna deformada con eje indeformado.
Figura 5. 15 : Tercer modo de pandeo (a) columna deformada, (b) columna deformada e
indeformada y (c) sección de la columna deformada con eje indeformado.
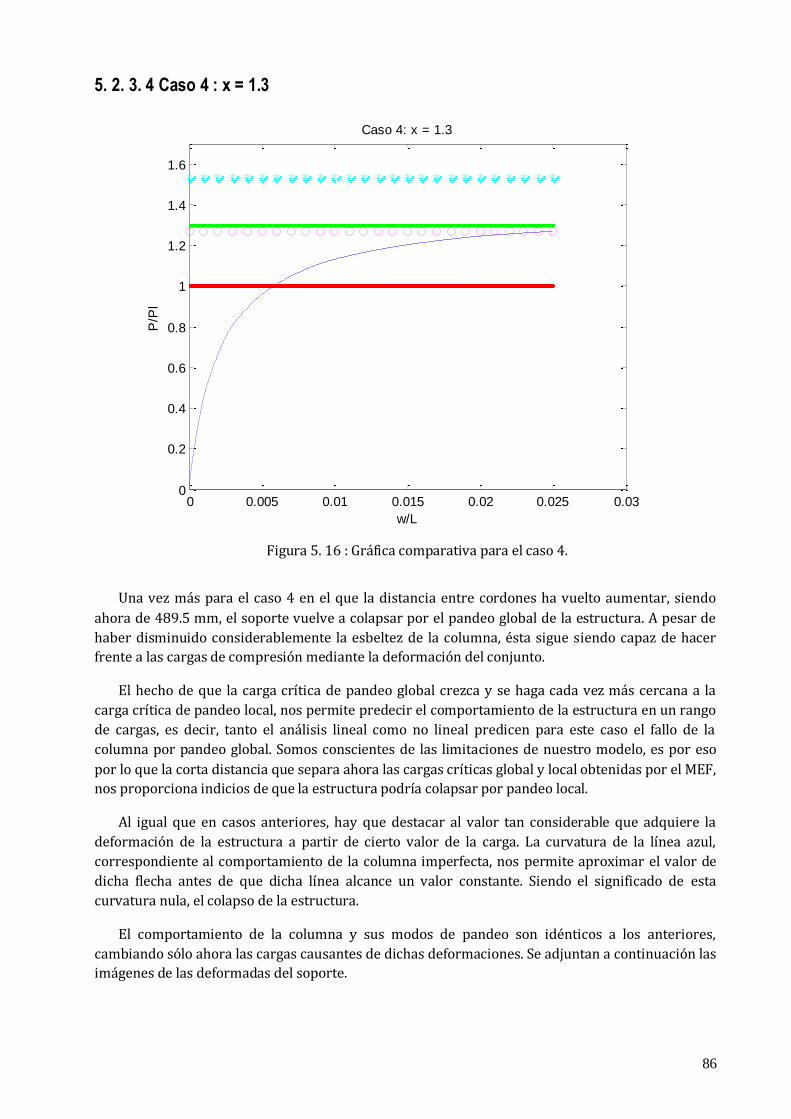
86
5. 2. 3. 4 Caso 4 : x = 1.3
Una vez más para el caso 4 en el que la distancia entre cordones ha vuelto aumentar, siendo
ahora de 489.5 mm, el soporte vuelve a colapsar por el pandeo global de la estructura. A pesar de
haber disminuido considerablemente la esbeltez de la columna, ésta sigue siendo capaz de hacer
frente a las cargas de compresión mediante la deformación del conjunto.
El hecho de que la carga crítica de pandeo global crezca y se haga cada vez más cercana a la
carga crítica de pandeo local, nos permite predecir el comportamiento de la estructura en un rango
de cargas, es decir, tanto el análisis lineal como no lineal predicen para este caso el fallo de la
columna por pandeo global. Somos conscientes de las limitaciones de nuestro modelo, es por eso
por lo que la corta distancia que separa ahora las cargas críticas global y local obtenidas por el MEF,
nos proporciona indicios de que la estructura podría colapsar por pandeo local.
Al igual que en casos anteriores, hay que destacar al valor tan considerable que adquiere la
deformación de la estructura a partir de cierto valor de la carga. La curvatura de la línea azul,
correspondiente al comportamiento de la columna imperfecta, nos permite aproximar el valor de
dicha flecha antes de que dicha línea alcance un valor constante. Siendo el significado de esta
curvatura nula, el colapso de la estructura.
El comportamiento de la columna y sus modos de pandeo son idénticos a los anteriores,
cambiando sólo ahora las cargas causantes de dichas deformaciones. Se adjuntan a continuación las
imágenes de las deformadas del soporte.
0 0.005 0.01 0.015 0.02 0.025 0.030
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 4: x = 1.3
w/L
P/P
l
Figura 5. 16 : Gráfica comparativa para el caso 4.
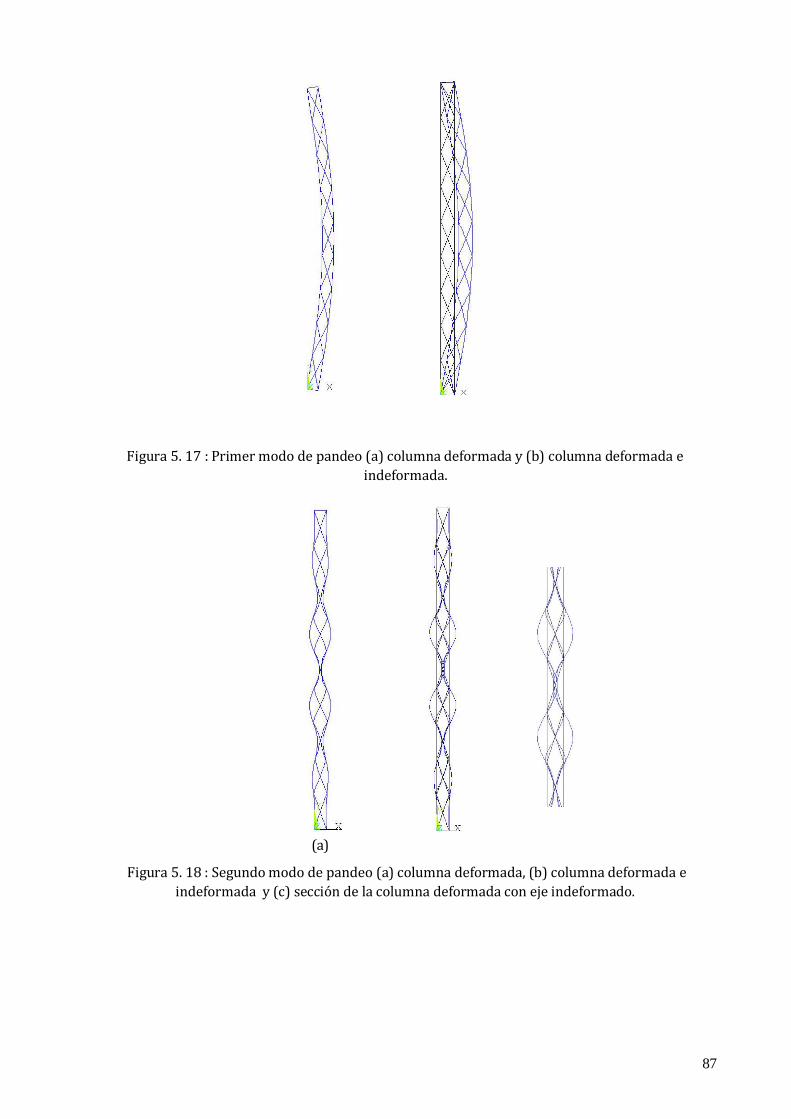
87
Figura 5. 17 : Primer modo de pandeo (a) columna deformada y (b) columna deformada e
indeformada.
Figura 5. 18 : Segundo modo de pandeo (a) columna deformada, (b) columna deformada e
indeformada y (c) sección de la columna deformada con eje indeformado.
(a)
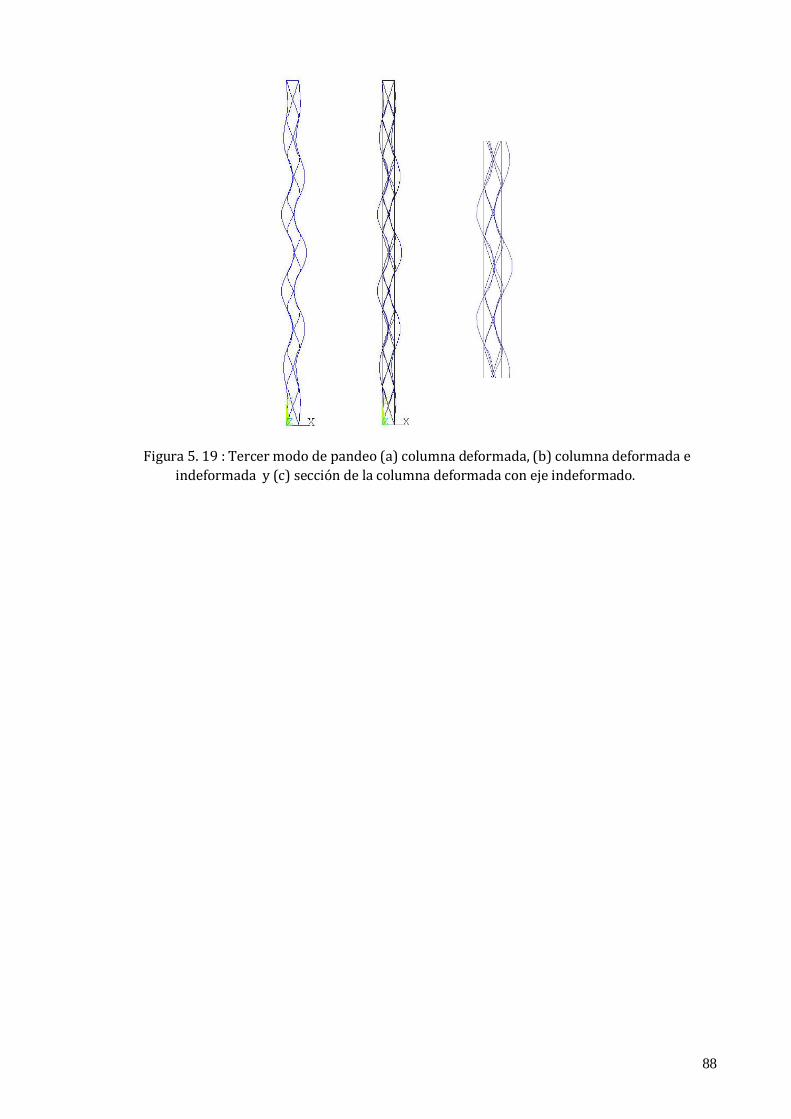
88
Figura 5. 19 : Tercer modo de pandeo (a) columna deformada, (b) columna deformada e
indeformada y (c) sección de la columna deformada con eje indeformado.
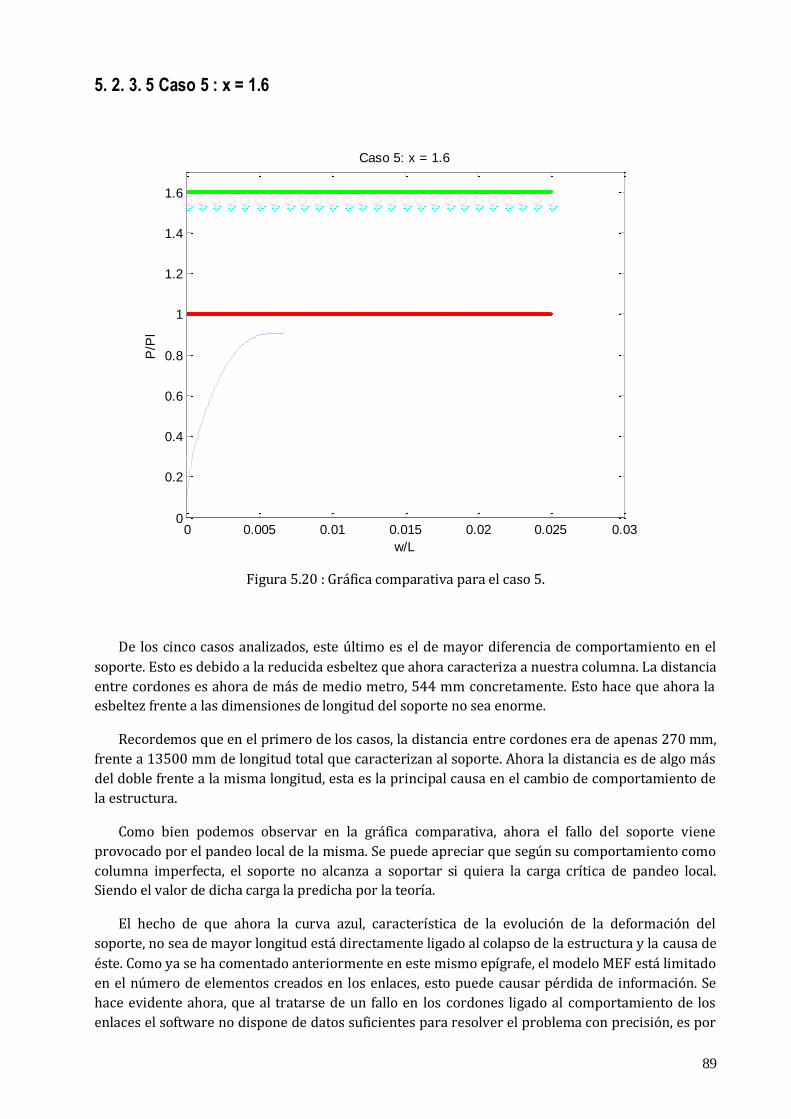
89
5. 2. 3. 5 Caso 5 : x = 1.6
De los cinco casos analizados, este último es el de mayor diferencia de comportamiento en el
soporte. Esto es debido a la reducida esbeltez que ahora caracteriza a nuestra columna. La distancia
entre cordones es ahora de más de medio metro, 544 mm concretamente. Esto hace que ahora la
esbeltez frente a las dimensiones de longitud del soporte no sea enorme.
Recordemos que en el primero de los casos, la distancia entre cordones era de apenas 270 mm,
frente a 13500 mm de longitud total que caracterizan al soporte. Ahora la distancia es de algo más
del doble frente a la misma longitud, esta es la principal causa en el cambio de comportamiento de
la estructura.
Como bien podemos observar en la gráfica comparativa, ahora el fallo del soporte viene
provocado por el pandeo local de la misma. Se puede apreciar que según su comportamiento como
columna imperfecta, el soporte no alcanza a soportar si quiera la carga crítica de pandeo local.
Siendo el valor de dicha carga la predicha por la teoría.
El hecho de que ahora la curva azul, característica de la evolución de la deformación del
soporte, no sea de mayor longitud está directamente ligado al colapso de la estructura y la causa de
éste. Como ya se ha comentado anteriormente en este mismo epígrafe, el modelo MEF está limitado
en el número de elementos creados en los enlaces, esto puede causar pérdida de información. Se
hace evidente ahora, que al tratarse de un fallo en los cordones ligado al comportamiento de los
enlaces el software no dispone de datos suficientes para resolver el problema con precisión, es por
0 0.005 0.01 0.015 0.02 0.025 0.030
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 5: x = 1.6
w/L
P/P
l
Figura 5.20 : Gráfica comparativa para el caso 5.
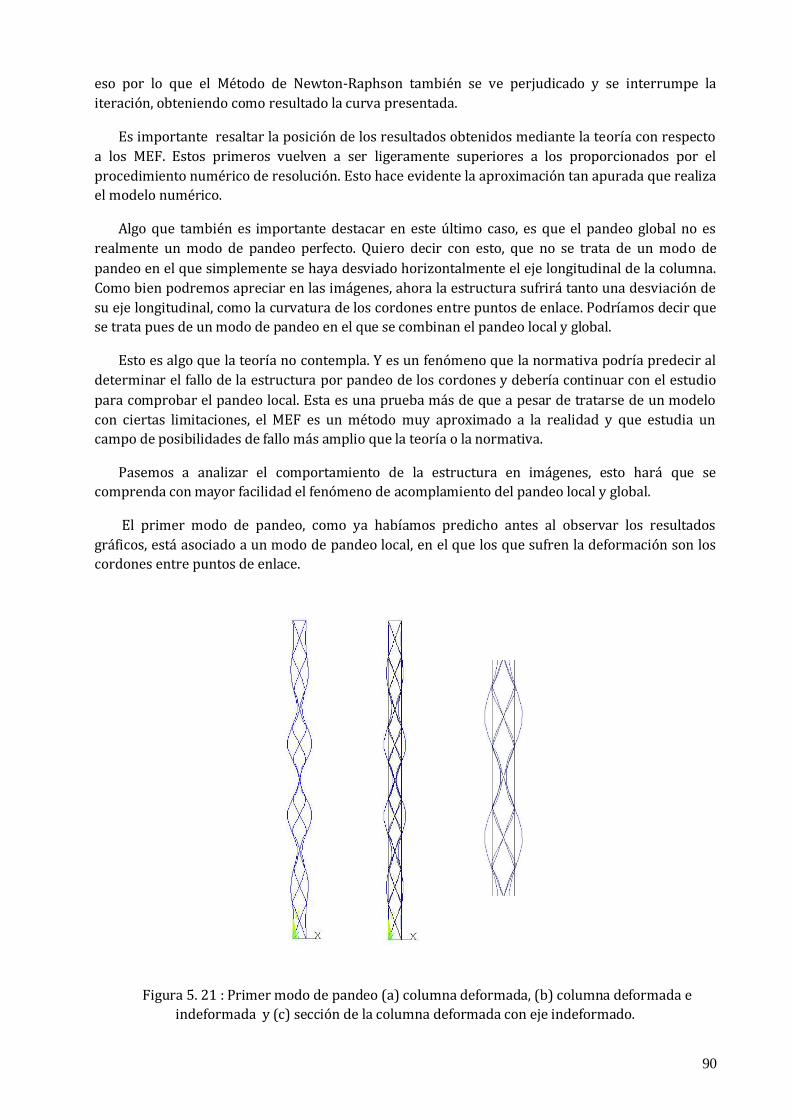
90
eso por lo que el Método de Newton-Raphson también se ve perjudicado y se interrumpe la
iteración, obteniendo como resultado la curva presentada.
Es importante resaltar la posición de los resultados obtenidos mediante la teoría con respecto
a los MEF. Estos primeros vuelven a ser ligeramente superiores a los proporcionados por el
procedimiento numérico de resolución. Esto hace evidente la aproximación tan apurada que realiza
el modelo numérico.
Algo que también es importante destacar en este último caso, es que el pandeo global no es
realmente un modo de pandeo perfecto. Quiero decir con esto, que no se trata de un modo de
pandeo en el que simplemente se haya desviado horizontalmente el eje longitudinal de la columna.
Como bien podremos apreciar en las imágenes, ahora la estructura sufrirá tanto una desviación de
su eje longitudinal, como la curvatura de los cordones entre puntos de enlace. Podríamos decir que
se trata pues de un modo de pandeo en el que se combinan el pandeo local y global.
Esto es algo que la teoría no contempla. Y es un fenómeno que la normativa podría predecir al
determinar el fallo de la estructura por pandeo de los cordones y debería continuar con el estudio
para comprobar el pandeo local. Esta es una prueba más de que a pesar de tratarse de un modelo
con ciertas limitaciones, el MEF es un método muy aproximado a la realidad y que estudia un
campo de posibilidades de fallo más amplio que la teoría o la normativa.
Pasemos a analizar el comportamiento de la estructura en imágenes, esto hará que se
comprenda con mayor facilidad el fenómeno de acomplamiento del pandeo local y global.
El primer modo de pandeo, como ya habíamos predicho antes al observar los resultados
gráficos, está asociado a un modo de pandeo local, en el que los que sufren la deformación son los
cordones entre puntos de enlace.
Figura 5. 21 : Primer modo de pandeo (a) columna deformada, (b) columna deformada e
indeformada y (c) sección de la columna deformada con eje indeformado.
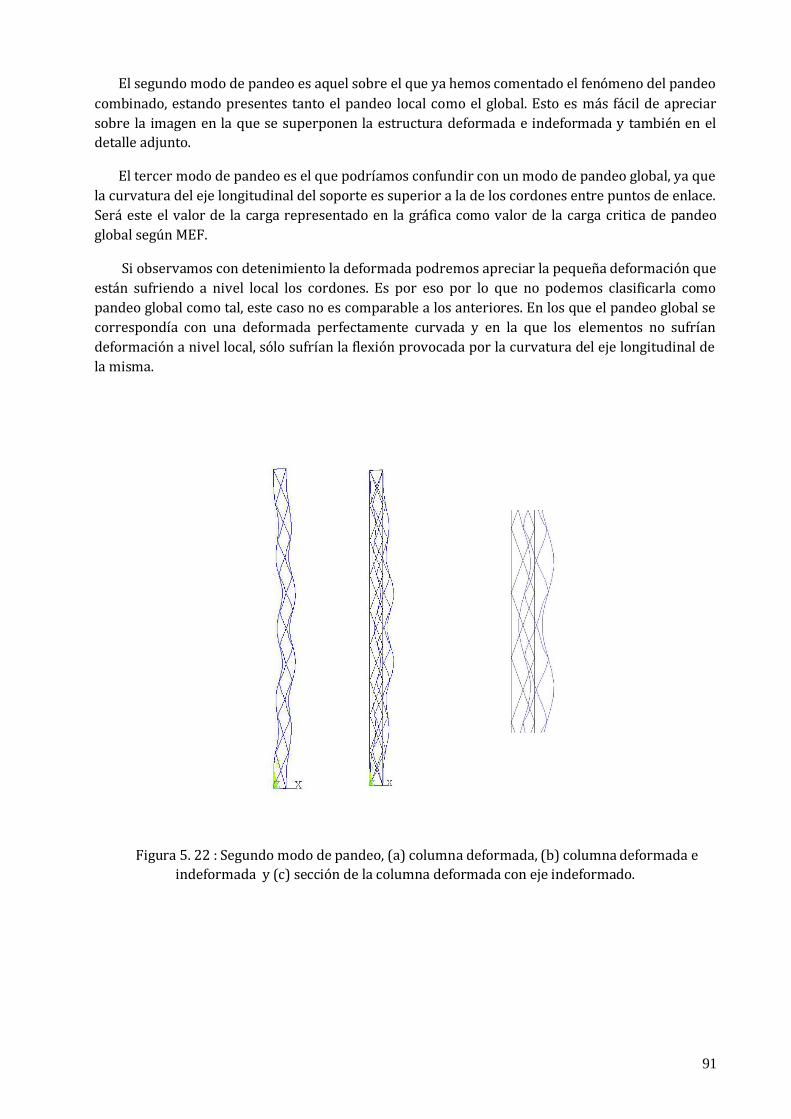
91
El segundo modo de pandeo es aquel sobre el que ya hemos comentado el fenómeno del pandeo
combinado, estando presentes tanto el pandeo local como el global. Esto es más fácil de apreciar
sobre la imagen en la que se superponen la estructura deformada e indeformada y también en el
detalle adjunto.
El tercer modo de pandeo es el que podríamos confundir con un modo de pandeo global, ya que
la curvatura del eje longitudinal del soporte es superior a la de los cordones entre puntos de enlace.
Será este el valor de la carga representado en la gráfica como valor de la carga critica de pandeo
global según MEF.
Si observamos con detenimiento la deformada podremos apreciar la pequeña deformación que
están sufriendo a nivel local los cordones. Es por eso por lo que no podemos clasificarla como
pandeo global como tal, este caso no es comparable a los anteriores. En los que el pandeo global se
correspondía con una deformada perfectamente curvada y en la que los elementos no sufrían
deformación a nivel local, sólo sufrían la flexión provocada por la curvatura del eje longitudinal de
la misma.
Figura 5. 22 : Segundo modo de pandeo, (a) columna deformada, (b) columna deformada e
indeformada y (c) sección de la columna deformada con eje indeformado.
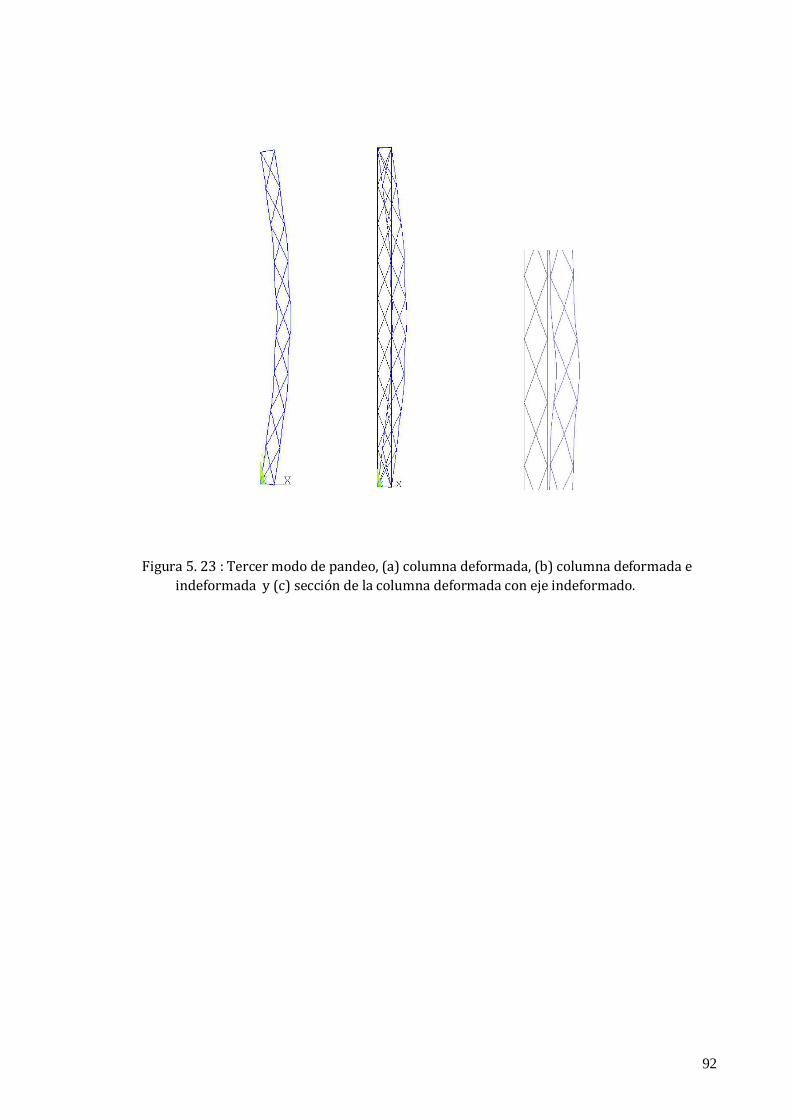
92
Figura 5. 23 : Tercer modo de pandeo, (a) columna deformada, (b) columna deformada e
indeformada y (c) sección de la columna deformada con eje indeformado.

93
5. 2. 3. 6 Comparación de Resultados BEAM188 – LINK1
Para terminar con el análisis de resultados de este primer ejemplo, pasamos a la comparación
explícita de las soluciones obtenidas mediante los dos modelos MEF creados para la resolución del
primer problema.
En este epígrafe trataremos de poner en evidencia lo que hemos ido comentando a lo largo del
análisis de resultados obtenidos. Vamos ahora a comparar los resultados obtenidos mediante la
modelización de los enlaces con elementos tipo LINK1 y el modelo con enlaces mallados con
elementos del tipo BEAM188.
Como podemos apreciar las gráficas obtenidas mediante ambos modelos son muy parecidas,
esto es señal de que hemos trabajado con precisión, ya que el hecho de que los resultados sean
prácticamente coincidente por diferentes vías es señal de convergencia.
Es haciendo esta reflexión cómo nos damos cuenta de dónde están las limitaciones de nuestro
modelo. Como ya se ha comentado anteriormente durante el análisis de los diferentes casos, el uso
de elementos LINK al no permitir el mallado con más de un elemento por barra nos ha
condicionado a la hora de obtener resultados a nivel local y relacionados con la inestabilidad de los
enlaces.
Es por eso por lo que la mayor diferencia entre ambos modelos está en el valor de las cargas
críticas de pandeo local. Está claro que cuando el colapso viene provocado por dicho fenómeno
ambos modelos son capaces de predecirlo, pero no con la misma precisión.
Como se ha comentado anteriormente, los elementos tipo BEAM permiten unos análisis mucho
más amplios que los tipo LINK, pero también son elementos que requieren de una discretización
muy específica. Son elementos sencillos de usar, pero no olvidemos que para que los casos
modelados sean fieles reproducciones de la realidad, deberemos hacer un estudio en profundidad y
repetir los análisis hasta alcanzar los resultados esperados, modificando en cada repetición el
modelado hasta asi crear el “modelo ideal”.
El caso que estamos resolviendo es de alta complejidad, ya que estamos estudiando el
comportamiento de un soporte compuesto ante las cargas de colapso, haciendo uso de una
herramienta de altísimo potencial como es el MEF. Por eso no nos debe extrañar que para llegar a
unos resultados totalmente exactos muchas iteraciones hayan debido realizarse.
El estudio llevado a cabo ha sido ya realizado con anterioridad por muchos compañeros pero la
modelización ha sido siempre muy sencilla, se ha estudiado el pandeo de la estructura
aproximándola mediante una columna. estos estudios suponen el punto de partida para llevar a
cabo el análisis de las cargas de colapso de modelos más complejos como es nuestro caso.
Hemos tratado de aproximar la geometría del modelo lo máximo posible a la realidad, pero eso
también ha hecho que encontremos muchas dificultades a la hora de la resolución, ya que son
muchas las condiciones de contorno que habría que tener en cuenta para reproducir de manera
exacta la estructura real.
Todo esto nos lleva a la conclusión de que a la vista de los resultados podemos afirmar que
éstos son de gran aplicación, ya que son una buena aproximación. Pero también deja constancia de
la complejidad que alcanzaría resolver este problema reproduciendo totalmente la estructura y las
condiciones reales.
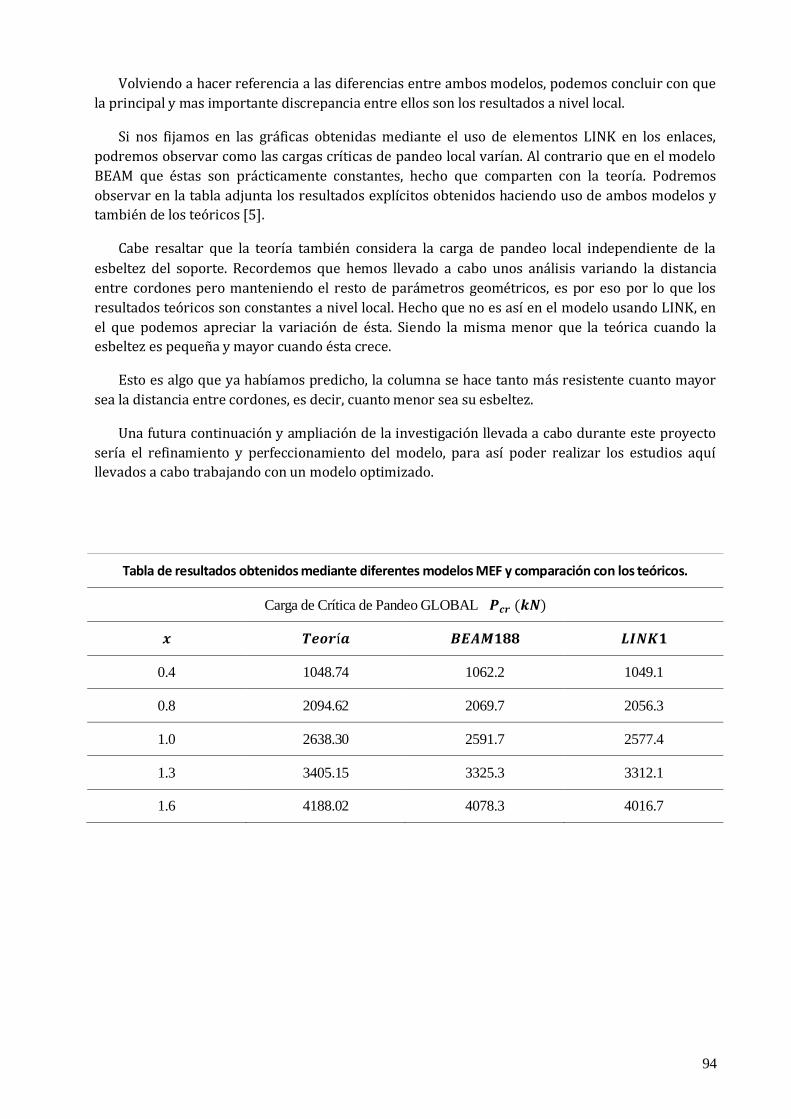
94
Volviendo a hacer referencia a las diferencias entre ambos modelos, podemos concluir con que
la principal y mas importante discrepancia entre ellos son los resultados a nivel local.
Si nos fijamos en las gráficas obtenidas mediante el uso de elementos LINK en los enlaces,
podremos observar como las cargas críticas de pandeo local varían. Al contrario que en el modelo
BEAM que éstas son prácticamente constantes, hecho que comparten con la teoría. Podremos
observar en la tabla adjunta los resultados explícitos obtenidos haciendo uso de ambos modelos y
también de los teóricos [5].
Cabe resaltar que la teoría también considera la carga de pandeo local independiente de la
esbeltez del soporte. Recordemos que hemos llevado a cabo unos análisis variando la distancia
entre cordones pero manteniendo el resto de parámetros geométricos, es por eso por lo que los
resultados teóricos son constantes a nivel local. Hecho que no es así en el modelo usando LINK, en
el que podemos apreciar la variación de ésta. Siendo la misma menor que la teórica cuando la
esbeltez es pequeña y mayor cuando ésta crece.
Esto es algo que ya habíamos predicho, la columna se hace tanto más resistente cuanto mayor
sea la distancia entre cordones, es decir, cuanto menor sea su esbeltez.
Una futura continuación y ampliación de la investigación llevada a cabo durante este proyecto
sería el refinamiento y perfeccionamiento del modelo, para así poder realizar los estudios aquí
llevados a cabo trabajando con un modelo optimizado.
Tabla de resultados obtenidos mediante diferentes modelos MEF y comparación con los teóricos.
Carga de Crítica de Pandeo GLOBAL
0.4 1048.74 1062.2 1049.1
0.8 2094.62 2069.7 2056.3
1.0 2638.30 2591.7 2577.4
1.3 3405.15 3325.3 3312.1
1.6 4188.02 4078.3 4016.7

95
A la vista de los resultados sólo queda hacer un breve resumen de lo anteriormente comentado.
La carga crítica global MEF es superior en ambos casos a la Teórica.
La carga crítica local Teórica es constante para todo x.
La carga crítica local MEF es inferior a la Teórica cuando el soporte es muy esbelto.
La carga crítica local MEF es superior a la Teórica cuando la esbeltez disminuye.
La carga crítica local del modelo mallado con BEAM188 es superior a la modelada con
LINK1. (siempre haciendo referencia en la diferencia de malla, únicamente a la de los
enlaces)
Tabla de resultados obtenidos mediante diferentes modelos MEF y comparación con los teóricos.
Carga de Crítica de Pandeo LOCAL
0.4 2616.1031 3230.7 2377.8
0.8 2616.1031 4016.9 2595.8
1.0 2616.1031 4018.2 2668.2
1.3 2616.1031 4014.6 2752.2
1.6 2616.1031 4008.0 2785.9

96
Caso 1 : x = 0.4
0 0.005 0.01 0.015 0.02 0.025 0.030
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 1: x = 0.4
w/L
P/P
l
0 0.005 0.01 0.015 0.02 0.025 0.030
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 1: x = 0.4
w/L
P/P
l
Figura 5. 24 : Gráficas comparativas (a) mallado de los enlaces mediante elementos BEAM188 y (b) mallado de los enlaces mediante elementos LINK1.
(a) (b)
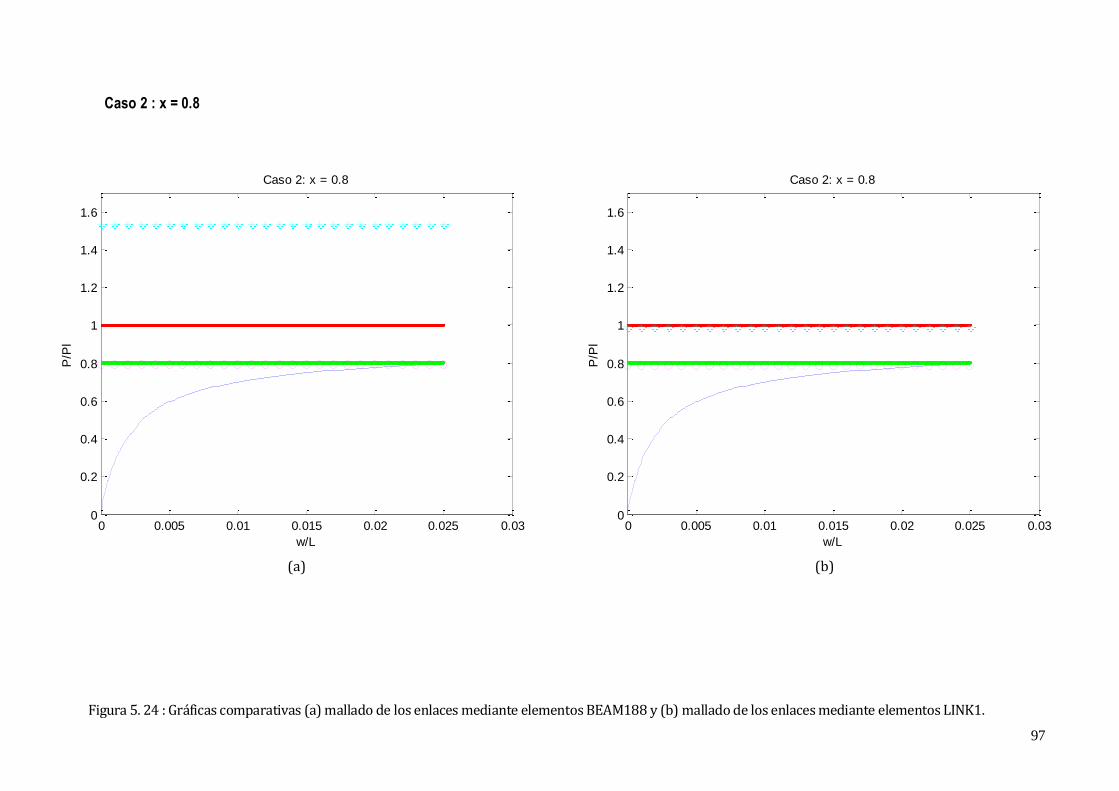
97
Caso 2 : x = 0.8
0 0.005 0.01 0.015 0.02 0.025 0.030
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 2: x = 0.8
w/L
P/P
l
0 0.005 0.01 0.015 0.02 0.025 0.030
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 2: x = 0.8
w/L
P/P
l
Figura 5. 24 : Gráficas comparativas (a) mallado de los enlaces mediante elementos BEAM188 y (b) mallado de los enlaces mediante elementos LINK1.
(a) (b)

98
Caso 3 : x = 1.0
0 0.005 0.01 0.015 0.02 0.025 0.030
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 3: x = 1
w/L
P/P
l
0 0.005 0.01 0.015 0.02 0.025 0.030
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 3: x = 1
w/L
P/P
l
Figura 5. 24 : Gráficas comparativas (a) mallado de los enlaces mediante elementos BEAM188 y (b) mallado de los enlaces mediante elementos LINK1.
(a) (b)

99
Caso 4 : x = 1.3
0 0.005 0.01 0.015 0.02 0.025 0.030
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 4: x = 1.3
w/L
P/P
l
0 0.005 0.01 0.015 0.02 0.025 0.030
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 4: x = 1.3
w/L
P/P
l
Figura 5. 24 : Gráficas comparativas (a) mallado de los enlaces mediante elementos BEAM188 y (b) mallado de los enlaces mediante elementos LINK1.
(a) (b)
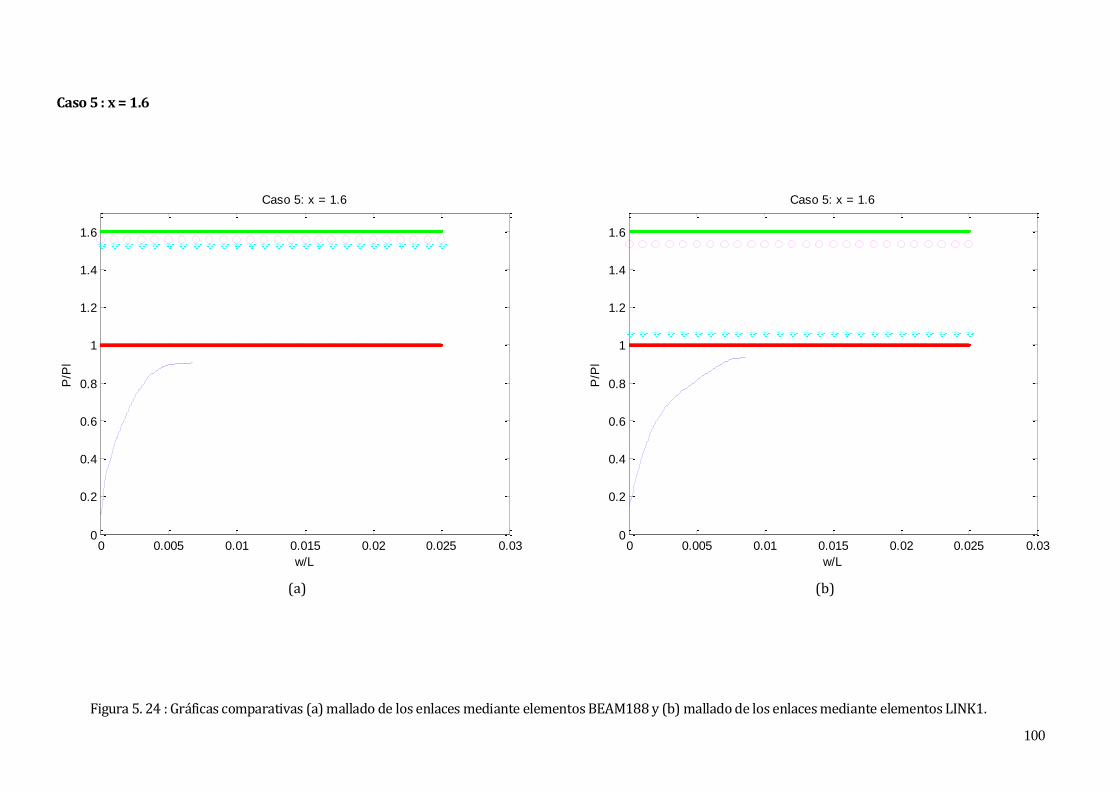
100
Caso 5 : x = 1.6
0 0.005 0.01 0.015 0.02 0.025 0.030
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 5: x = 1.6
w/L
P/P
l
0 0.005 0.01 0.015 0.02 0.025 0.030
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 5: x = 1.6
w/L
P/P
l
Figura 5. 24 : Gráficas comparativas (a) mallado de los enlaces mediante elementos BEAM188 y (b) mallado de los enlaces mediante elementos LINK1.
(a) (b)

101
5. 3 EJEMPLO 2: SOPORTE COMPUESTO ENLAZADO
EN CELOSÍA (PROBLEMA 3D)
Para la resolución de un problema mas real, se ha decidido resolver un segundo problema.
Como geometría del problema 2, correspondiente al de un soporte compuesto 3D se ha vuelto a
tomar un soporte compuesto enlazado en celosía. En esta ocasión, el soporte tiene dos planos de
enlaces, que suele ser lo habitual en soportes de esta tipología.
En esta ocasión, debido a las características del problema algunas dimensiones geométricas han
sido modificadas, siempre con el fin de obtener resultados lo mas reales posibles a partir de un
modelo lo mas real posible también.
Los datos geométricos del problema 2 son los que se recogen en la tabla mostrada a
continuación:
Los enlaces que utilizaremos ahora también han variado sus dimensiones, ya que si no el
colapso de la estructura se produciría únicamente debido al pandeo de los enlaces. Es un fenómeno
que no dejaremos de considerar, pero que no es deseable ya que limita nuestro estudio. Las
dimensiones de dichos enlaces serán ahora de 30 x 70 mm, siendo la sección exactamente la misma
que la del problema anterior.
El principal objetivo de la resolución de este problema tridimensional es poder ampliar el
estudio del pandeo del soporte compuesto, pudiendo ahora considerar como causa de colapso de la
misma el pandeo en torno a los ejes tanto libre como material, Z e Y respectivamente.
Al tratarse de un problema tridimensional en el que no se impide el pandeo fuera del plano,
también puede aparecer el pandeo local de los cordones fuera de su plano. Algo menos común, ya
que dicho eje es el conocido como “eje fuerte de inercia”, alrededor del cual es mas difícil que se
produzca el fallo ya que el material esta concentrado en el mismo.
1000 100 45.9 5790 420 varios
Figura 5. 25. : Sección BB’ del soporte 3D
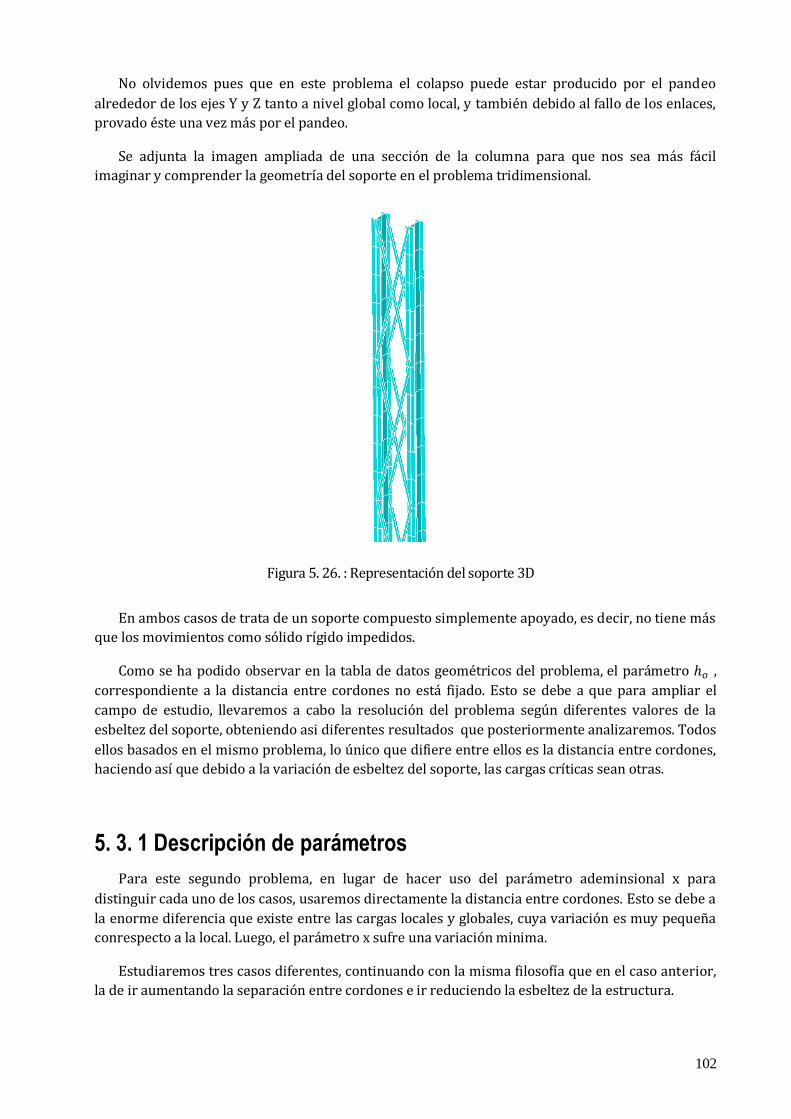
102
No olvidemos pues que en este problema el colapso puede estar producido por el pandeo
alrededor de los ejes Y y Z tanto a nivel global como local, y también debido al fallo de los enlaces,
provado éste una vez más por el pandeo.
Se adjunta la imagen ampliada de una sección de la columna para que nos sea más fácil
imaginar y comprender la geometría del soporte en el problema tridimensional.
En ambos casos de trata de un soporte compuesto simplemente apoyado, es decir, no tiene más
que los movimientos como sólido rígido impedidos.
Como se ha podido observar en la tabla de datos geométricos del problema, el parámetro ,
correspondiente a la distancia entre cordones no está fijado. Esto se debe a que para ampliar el
campo de estudio, llevaremos a cabo la resolución del problema según diferentes valores de la
esbeltez del soporte, obteniendo asi diferentes resultados que posteriormente analizaremos. Todos
ellos basados en el mismo problema, lo único que difiere entre ellos es la distancia entre cordones,
haciendo así que debido a la variación de esbeltez del soporte, las cargas críticas sean otras.
5. 3. 1 Descripción de parámetros
Para este segundo problema, en lugar de hacer uso del parámetro ademinsional x para
distinguir cada uno de los casos, usaremos directamente la distancia entre cordones. Esto se debe a
la enorme diferencia que existe entre las cargas locales y globales, cuya variación es muy pequeña
conrespecto a la local. Luego, el parámetro x sufre una variación minima.
Estudiaremos tres casos diferentes, continuando con la misma filosofía que en el caso anterior,
la de ir aumentando la separación entre cordones e ir reduciendo la esbeltez de la estructura.
Figura 5. 26. : Representación del soporte 3D
103
Los tres casos estudiados son los recogidos en la tabla siguiente,
Casos analizados según separación entre cordones,
Caso
Primer 20
Segundo 40
Tercer 60
El modelo MEF utilizado para resolver este problema ya ha sido descrito junto al del problema
2D, ya que las características de ambos en cuanto a MEF se refiere son bastante parecidas. Se ha
marcado bien la diferencia donde haya sido necesario.
Pasaremos ahora entonces a la resolución del problema 3D según los diferentes esquemas de
resolución escogidos y que ya han sido extensamente explicados y aplicados en el proyecto.
5. 3. 2 Esquemas de Resolución
5. 3. 2. 1 Resolución Teórica
En este epígrafe vamos a resolver el problema haciendo uso de la teoría clásica, la también
propuesta por la teoría [5] y que hemos tomado como referencia para la resolución teórica en este
proyecto.
Siguiendo el mismo procedimiento que el Problema 2D, comenzaremos por determinar
aquellos parámetros que nos sean necesarios para el posterior cálculo de las cargas críticas de
pandeo teóricas.
Debemos tener en cuenta que estamos estudiando dichos valores para distintas configuraciones
de esbeltez del soporte y también para los diferentes casos que se puedan dar, tanto de cargas en
ambos ejes Y y Z, como a nivel local, siempre en el eje libre.
Igual que hicimos en el primer problema, vamos a resolver las ecuaciones para un único valor
de ya que la manera de proceder es idéntica en los tres casos.
104
Ahora que tenemos los valores de las inercias efectivas y de la resistencia a cizalladura de los
cordones, podemos pasar a la determinación de las cargas críticas de pandeo teóricas, que además
nos servirán para la resolución del epígrafe siguiente, según el EC3 (EAE).
Antes de continuar con el cálculo de la carga de pandeo global, necesitaremos para su
determinación, hallar el valor de las cargas críticas de Euler.
Pasemos finalmente al cálculo de la carga de pandeo global según la teoría,
En la siguiente tabla se muestra un resumen de los parámetros, de los que algunos como las cargas críticas de Euler usaremos en el siguiente ejercicio.
Tabla resumen de parámetros Teóricos
( )
( )
( )
( )
( )
200 91,80 115,80 57,025
400 367,25 115,80 193,64
600 826,19 115,80 343,20 17 123,96

105
Sean estos los resultados finalmente obtenidos siguiendo la resolución teórica:
5. 3. 2. 2 Eurocódigo 3 (EAE)
Al igual que hicimos en el problema 1, antes de resolver este otro problema mediante MEF,
vamos a calcular las soluciones al mismo aplicando la comprobacion de la normativa. El
procedimiento es análogo al seguido en el primer problema. Partiremos de la restricción impuesta
por el EC3 (EAE) para el cumplimento de las condiciones de seguridad, para a partir de ésta
determinar la carga que provocaría el colapso de la estructura.
Como ya habíamos explicado antes, el fin de este segundo problema es ampliar las posibles
causas del colapso de la estructura, por eso ahora llevaremos a cabo el cálculo de las cargas criticas
de pandeo global en el eje Y, el pandeo local en el eje Z y el pandeo de los cordones.
Resolveremos el primero de los tres casos estudiados, para el que el valor de El
procedimiento después será igual para los otros dos casos considerados, luego resumiremos los
resultados obtenidos en una tabla.
Partimos de la condición de seguridad
Igual que en el problema 1, esta es la expresión de la que obtendremos el valor de la carga axil
de compresión capaz de causar el colapso de la estructura.
Para la comprobación de los diferentes fallos que pueden suceder,lo único que debemos tener
en cuenta es que el valor de la resistencia de cálculo a pandeo del cordón comprimido cambiará
según la longitud de pandeo.
Lo primero que haremos pues, será calcular el valor de cada uno de estos factores para después
solo tener que resolver la ecuación haciendo los cambios en los parámetros en los que deban ser
hechos.
Tabla resultados Teóricos
( )
( )
200
400 7 322,82
600 16 310,16

106
Ahora que tenemos los coeficientes reductores de pandeo ya tenemos los datos necesarios para
calcular para cada uno de las situaciones consideradas.
Estos serán los valores que establezcan el límite en el axil de compresión en los cordones de
nuestro soporte. Pasemos ahora al cálculo del valor de la resistencia a cizalladura de los enlaces
para nuestro primer caso, en el que recordemos que la separación entre cordones es de 200 mm.
Volveremos a hacer uso de la misma expresión que en la resolución del problema 1, ya que la
tipología de nuestro soporte no ha cambiado, sólo ajustaremos los parámetros al ejemplo 2.
Tenemos ahora que tener en cuenta la posible desviación de la vertical del soporte, ya que es la
causa de que exista un momento flector en la aplicación de la carga de compresión, sea la definición
de ésta :

107
Ahora ya disponemos de todos los datos necesarios para pasar a sustituir en la ecuación antes
presentada y así poder ir hallando los valores de las diferentes cargas de colapso. El valor de la
carga crítica de Euler en z es la en la tabla de resultados teóricos.
Los valores de P según el plano y pandeo considerados:
Un fenómeno que no debemos dejar de estudiar en este segundo problema y que ya habíamos
comentado antes, es el del fallo de los enlaces. Siguiendo un procedimiento muy parecido,
pasaremos ahora al cálculo de la carga crítica que por compresión causaría el pandeo de los
enlaces.
Siendo ésta una comprobación a cortante muy sencilla y parecida a la anterior,
Haciendo uso de estas expresiones es como llegamos a la ecuación a partir de la cual podremos
obtener el valor de la carga P buscada.
Antes de poder resolverla tenemos que hacer como antes y calcular los parámetros geométricos
para poder así obtener el valor del coeficiente reductor de pandeo.
108
Una vez hemos obtenido todos los parámetros necesarios, sustituimos en la ecuación anterior
de la que podremos hallar P.
Operando de manera análoga para el resto de casos, según los valores de iremos obteniendo
los resultados de todas y cada una de las cargas buscadas, las cuales se resumen en la tabla
siguiente :
Tabla resultados EC3 (EAE)
( )
( )
( )
( )
200
400 1 279,89 1 710,59 4 988,66 1 279,89
600 1 341,13 1 805,37 9 524,40 1 341,13
Donde representa la carga de colapso proporcionada por el Eurocódigo 3, es decir, la
carga mínima de fallo de todas las estudiadas para cada valor de la separación entre cordones.

109
5. 3. 2. 3 ANSYS
Igual que hicimos con el problema anterior, vamos a recoger los resultados del MEF obtenidos
mediante un análisis lineal en ANSYS, en una tabla. Para posteriormente, junto con los resultados
del análisis no lineal llevar a cabo la comparación entre las cargas de colapso determinadas por las
diferentes metodologías seguidas.
Tabla de resultados MEF
20.00 4 842.3 2 181.6 22 324 4 923.0
40.00 4 481.7 7 721.9 19 978 7 617.6
60.00 4 043.9 16 668.0 19 709 9 177.9
De la resolución con ANSYS no sólo obtenemos el valor de las cargas críticas de pandeo a
comparar con las teóricas, recordemos que también se ha llevado a cabo un análisis no lineal.
Análisis del que hemos obtenido la curva de respuesta del soporte ante las aplicaciones de carga.
Destacar también, que al igual que en el problema anterior, dicha curva corresponde al
comportamiento de una columna imperfecta, ya que ésta cuenta con una deformación inicial del
orden de L/500.
5. 3. 3 Análisis de Resultados
En este epígrafe observaremos con detenimiento los resultados proporcionados por ANSYS, así
como su comparación con los derivados de las resoluciones teóricas. Para un análisis mas
ilustrativo y claro procederemos exactamente igual que en el Ejemplo 1, construiremos unas
gráficas en las que se reflejen tanto los resultados del MEF como los resultados teóricos.
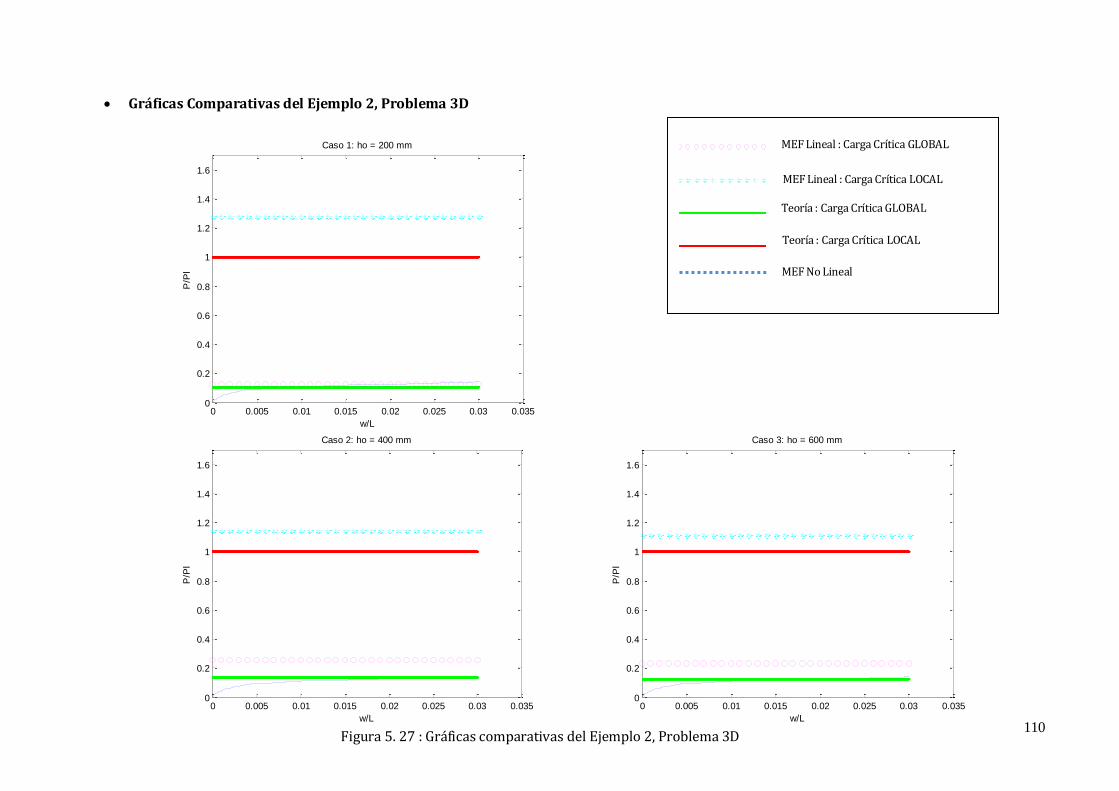
110
Gráficas Comparativas del Ejemplo 2, Problema 3D
0 0.005 0.01 0.015 0.02 0.025 0.03 0.0350
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 1: ho = 200 mm
w/L
P/P
l
0 0.005 0.01 0.015 0.02 0.025 0.03 0.0350
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 2: ho = 400 mm
w/L
P/P
l
0 0.005 0.01 0.015 0.02 0.025 0.03 0.0350
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 3: ho = 600 mm
w/L
P/P
l
0 0.005 0.01 0.015 0.02 0.0250
5
10
15
20
25
30
MEF Lineal : Carga Crítica GLOBAL
MEF Lineal : Carga Crítica LOCAL
Teoría : Carga Crítica GLOBAL
Teoría : Carga Crítica LOCAL
Figura 5. 27 : Gráficas comparativas del Ejemplo 2, Problema 3D
MEF No Lineal

111
5. 3. 3 .1 Caso 1 : h = 200 mm
Figura 5. 28 : Gráfica comparativa del caso 1.
En la gráfica adjunta, en la que se representan los valores de las cargas críticas según la
metodología empleada para resolver el problema, se puede observar cómo los valores de las cargas
críticas globales de pandeo según MEF y la teoría tienen valores muy parecidos, estando el valor
teórico algo por debajo al valor obtenido por ANSYS. Esto es una prueba más de aquello que se
demuestra en este proyecto, y es que la teoría tiene una posición mas conservadora que el método
de los elementos finitos en cuanto a cargas de colapso se refiere.
Es significativo observar cómo el comportamiento de la estructura en la evolución de la
deformación frente a la aplicación de la carga tiende al valor de la carga de colapso dada por el MEF.
Es decir, la estructura, a pesar de tener una no linealidad geométrica, es capaz de soportar cargas
superiores a las que el método teórico predice.
De nuevo, al igual que ocurría en el problema anterior, las cargas locales del método teórico y
MEF son muy dispares. Como se ha comentado anteriormente, esto se debe tanto a las limitaciones
del modelo de simulación ANSYS, como a que la teoría propuesta por la teoría [5] está cometiendo
un error al considerar que la carga crítica local no es dependiente de la separación entre cordones.
Esto es algo que se expondrá con detenimiento en las conclusiones finales del documento.
Pasemos a observar el comportamiento de la estructura ahora mediante la observación de sus
deformadas. El primer modo de pandeo de la estructura es el que se muestra en la figura, como se
0 0.005 0.01 0.015 0.02 0.025 0.03 0.0350
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 1: ho = 200 mm
w/L
P/P
l
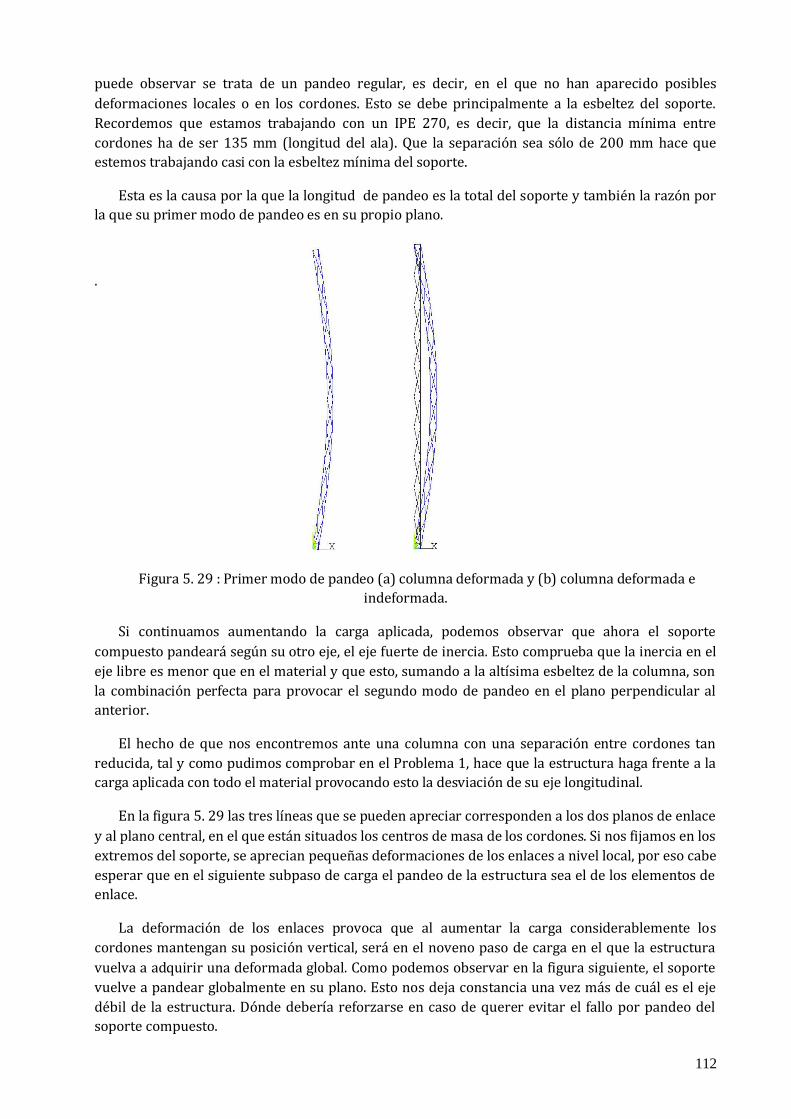
112
puede observar se trata de un pandeo regular, es decir, en el que no han aparecido posibles
deformaciones locales o en los cordones. Esto se debe principalmente a la esbeltez del soporte.
Recordemos que estamos trabajando con un IPE 270, es decir, que la distancia mínima entre
cordones ha de ser 135 mm (longitud del ala). Que la separación sea sólo de 200 mm hace que
estemos trabajando casi con la esbeltez mínima del soporte.
Esta es la causa por la que la longitud de pandeo es la total del soporte y también la razón por
la que su primer modo de pandeo es en su propio plano.
.
Figura 5. 29 : Primer modo de pandeo (a) columna deformada y (b) columna deformada e
indeformada.
Si continuamos aumentando la carga aplicada, podemos observar que ahora el soporte
compuesto pandeará según su otro eje, el eje fuerte de inercia. Esto comprueba que la inercia en el
eje libre es menor que en el material y que esto, sumando a la altísima esbeltez de la columna, son
la combinación perfecta para provocar el segundo modo de pandeo en el plano perpendicular al
anterior.
El hecho de que nos encontremos ante una columna con una separación entre cordones tan
reducida, tal y como pudimos comprobar en el Problema 1, hace que la estructura haga frente a la
carga aplicada con todo el material provocando esto la desviación de su eje longitudinal.
En la figura 5. 29 las tres líneas que se pueden apreciar corresponden a los dos planos de enlace
y al plano central, en el que están situados los centros de masa de los cordones. Si nos fijamos en los
extremos del soporte, se aprecian pequeñas deformaciones de los enlaces a nivel local, por eso cabe
esperar que en el siguiente subpaso de carga el pandeo de la estructura sea el de los elementos de
enlace.
La deformación de los enlaces provoca que al aumentar la carga considerablemente los
cordones mantengan su posición vertical, será en el noveno paso de carga en el que la estructura
vuelva a adquirir una deformada global. Como podemos observar en la figura siguiente, el soporte
vuelve a pandear globalmente en su plano. Esto nos deja constancia una vez más de cuál es el eje
débil de la estructura. Dónde debería reforzarse en caso de querer evitar el fallo por pandeo del
soporte compuesto.
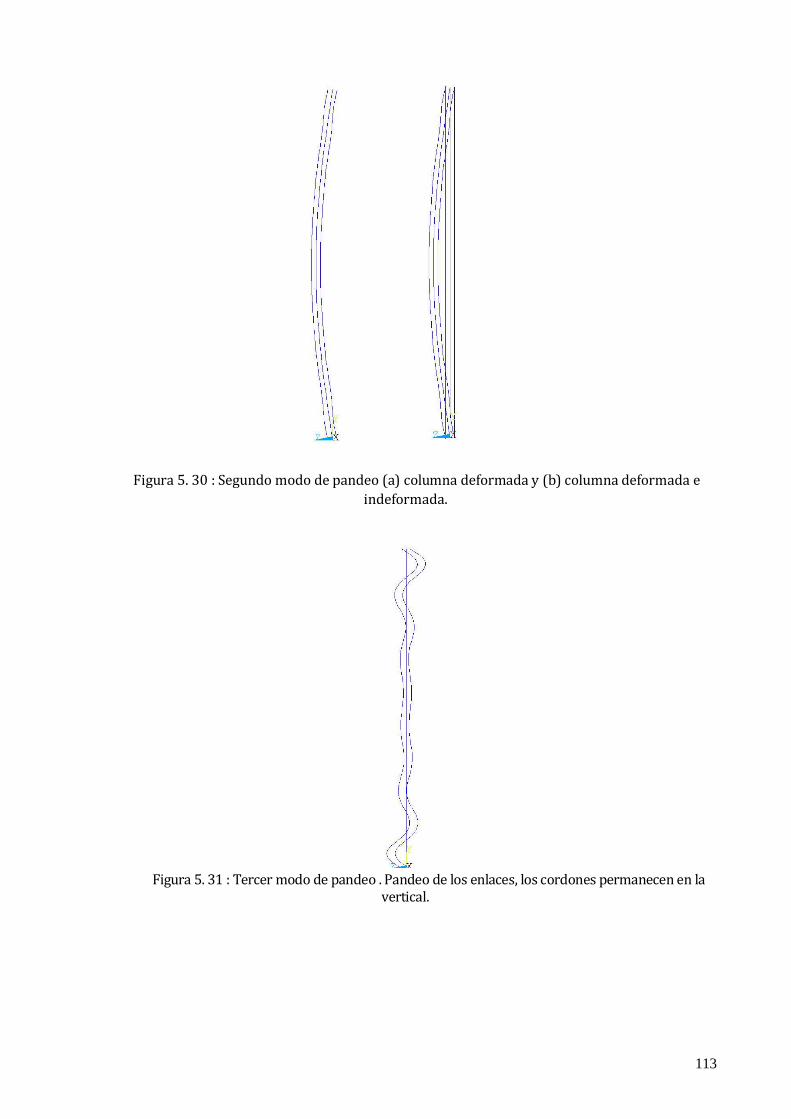
113
Figura 5. 30 : Segundo modo de pandeo (a) columna deformada y (b) columna deformada e
indeformada.
Figura 5. 31 : Tercer modo de pandeo . Pandeo de los enlaces, los cordones permanecen en la vertical.

114
Figura 5. 32: Noveno modo de pandeo (a) columna deformada y (b) columna
deformada e indeformada.
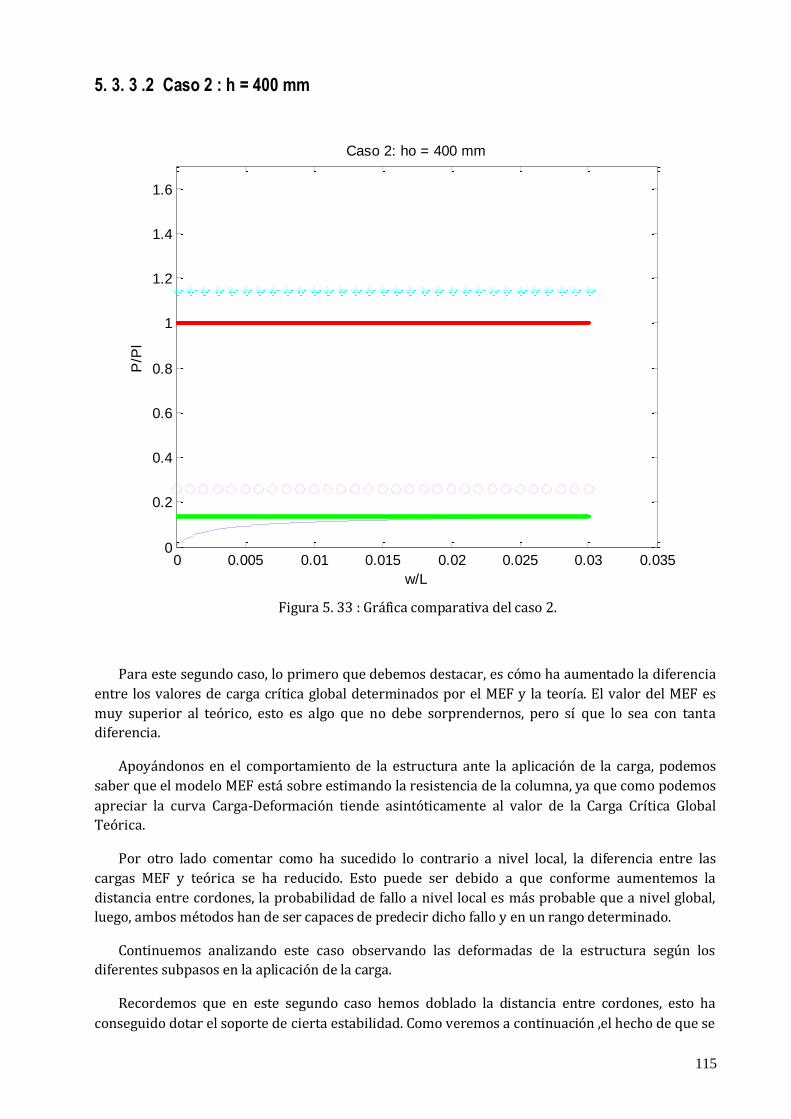
115
5. 3. 3 .2 Caso 2 : h = 400 mm
Figura 5. 33 : Gráfica comparativa del caso 2.
Para este segundo caso, lo primero que debemos destacar, es cómo ha aumentado la diferencia
entre los valores de carga crítica global determinados por el MEF y la teoría. El valor del MEF es
muy superior al teórico, esto es algo que no debe sorprendernos, pero sí que lo sea con tanta
diferencia.
Apoyándonos en el comportamiento de la estructura ante la aplicación de la carga, podemos
saber que el modelo MEF está sobre estimando la resistencia de la columna, ya que como podemos
apreciar la curva Carga-Deformación tiende asintóticamente al valor de la Carga Crítica Global
Teórica.
Por otro lado comentar como ha sucedido lo contrario a nivel local, la diferencia entre las
cargas MEF y teórica se ha reducido. Esto puede ser debido a que conforme aumentemos la
distancia entre cordones, la probabilidad de fallo a nivel local es más probable que a nivel global,
luego, ambos métodos han de ser capaces de predecir dicho fallo y en un rango determinado.
Continuemos analizando este caso observando las deformadas de la estructura según los
diferentes subpasos en la aplicación de la carga.
Recordemos que en este segundo caso hemos doblado la distancia entre cordones, esto ha
conseguido dotar el soporte de cierta estabilidad. Como veremos a continuación ,el hecho de que se
0 0.005 0.01 0.015 0.02 0.025 0.03 0.0350
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 2: ho = 400 mm
w/L
P/P
l

116
haya reducido la esbeltez en apenas unos milímetros, consigue modificar de manera significativa el
comportamiento de la estructura.
Lo primero que nos llama la atención es que al haber aumentado la separación entre cordones,
hemos proporcionado una mayor resistencia al pandeo en el eje libre, provocando así que la
primera deformación de la estructura se experimente fuera su propio plano. El primer modo de
pandeo de la estructura, vuelve a ser global, esto quiere decir que la esbeltez es aun bastante
reducida para las dimensiones del soporte y que por lo tanto, éste deforma globalmente ante la
carga crítica de pandeo.
Figura 5. 34 :Primer modo de pandeo (a) columna deformada y (b) columna deformada e
indeformada.
Al contrario que sucedía en el caso anterior, podemos observar que la deformada según el plano
perpendicular al eje Z no presenta indicios de curvatura de los enlaces, pero como veremos en la
siguiente figura, al aumentar la carga provocaremos la perdida de estabilidad en la celosía de unión
entre cordones. Éstos adquieren forma curvada en las cercanías de aplicación de la carga, donde se
concentran los mayores esfuerzos en el momento de aplicación de la misma.
Nos tendremos que ir al sexto subpaso de carga para observar el pandeo en su plano de la
estructura. Como bien podemos comprobar en las tablas en las que se recogen los resultados, la
diferencia de carga entre el segundo modo de pandeo y el sexto no es más que de 10 kN. El hecho de
que la estructura tenga un comportamiento tan diferente en un rango tan pequeño de carga es
síntoma de la perdida de estabilidad de la misma.
También es esto que comentamos, indicio de la resistencia a pandeo en el eje libre (eje Z) de la
que se ha dotado a la estructura con tan solo doblar la distancia entre cordones. Esto es algo que
podremos corroborar con la observación de las deformadas y cargas de colapso del caso siguiente,
en el que se ha vuelto a aumentar la distancia entre cordones y como veremos la carga de colapso
volverá a ser la carga critica de pandeo global según el eje Y.

117
Será después del séptimo subpaso de carga, cuando la estructura vuelva a deformarse según el
eje Y, adquiriendo ahora una deformada nuevamente de carácter global. No será hasta el último
subpaso de carga, el décimo, que aparezcan deformaciones locales no ligadas al fallo de los enlaces.
Esto quiere decir, que la estructura es relativamente débil aún.
Figura 5. 35 : Segundo modo de pandeo . Pandeo de los enlaces, los cordones permanecen en la
vertical.
Figura 5. 36 :Sexto modo de pandeo (a) columna deformada y (b) columna deformada e
indeformada
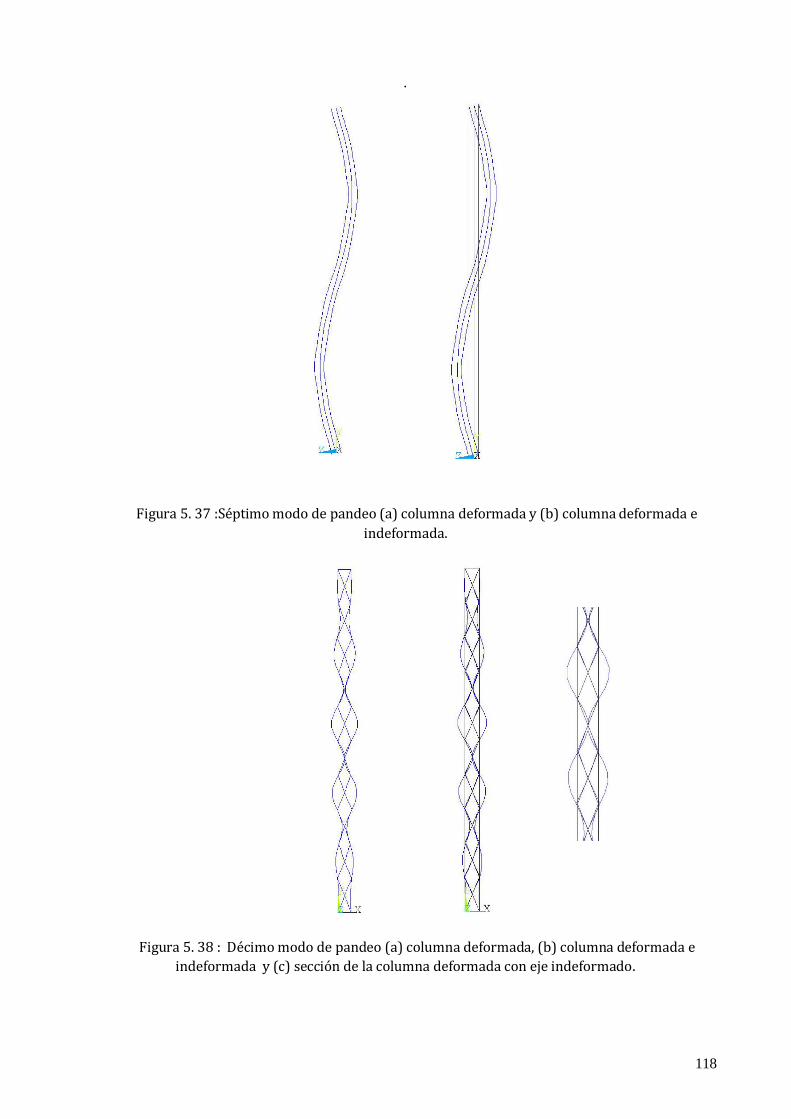
118
.
Figura 5. 37 :Séptimo modo de pandeo (a) columna deformada y (b) columna deformada e
indeformada.
Figura 5. 38 : Décimo modo de pandeo (a) columna deformada, (b) columna deformada e
indeformada y (c) sección de la columna deformada con eje indeformado.
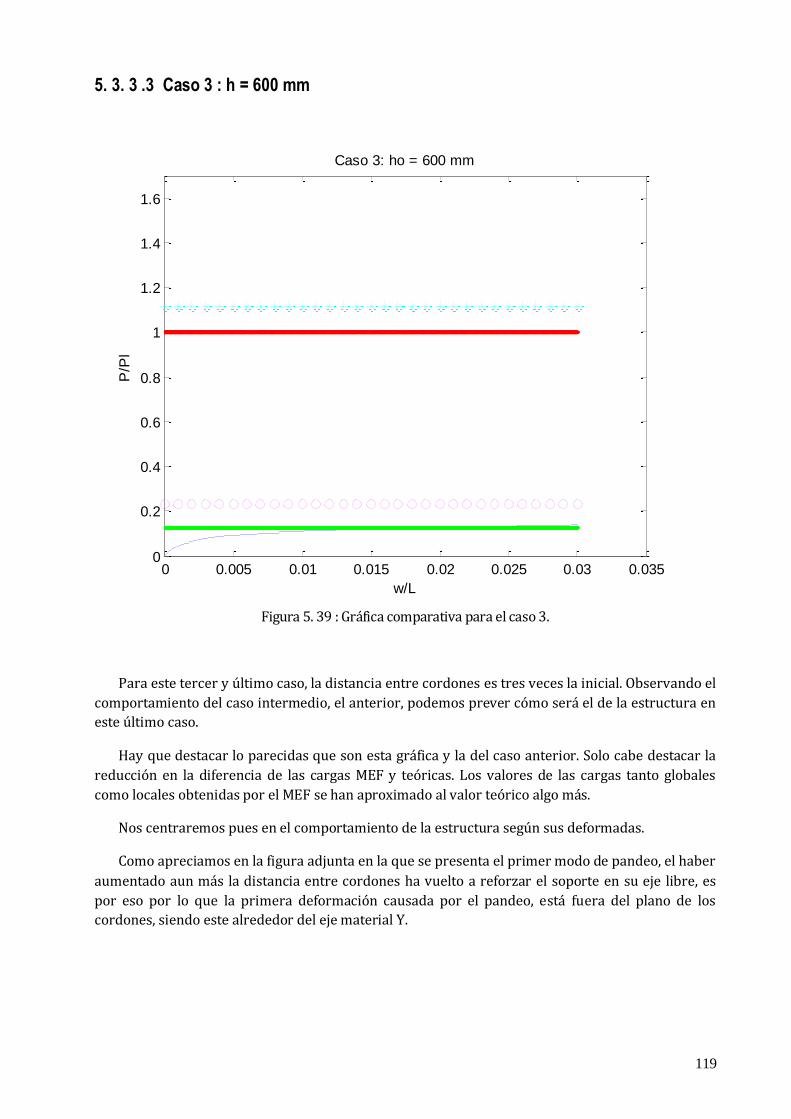
119
5. 3. 3 .3 Caso 3 : h = 600 mm
Figura 5. 39 : Gráfica comparativa para el caso 3.
Para este tercer y último caso, la distancia entre cordones es tres veces la inicial. Observando el
comportamiento del caso intermedio, el anterior, podemos prever cómo será el de la estructura en
este último caso.
Hay que destacar lo parecidas que son esta gráfica y la del caso anterior. Solo cabe destacar la
reducción en la diferencia de las cargas MEF y teóricas. Los valores de las cargas tanto globales
como locales obtenidas por el MEF se han aproximado al valor teórico algo más.
Nos centraremos pues en el comportamiento de la estructura según sus deformadas.
Como apreciamos en la figura adjunta en la que se presenta el primer modo de pandeo, el haber
aumentado aun más la distancia entre cordones ha vuelto a reforzar el soporte en su eje libre, es
por eso por lo que la primera deformación causada por el pandeo, está fuera del plano de los
cordones, siendo este alrededor del eje material Y.
0 0.005 0.01 0.015 0.02 0.025 0.03 0.0350
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Caso 3: ho = 600 mm
w/L
P/P
l
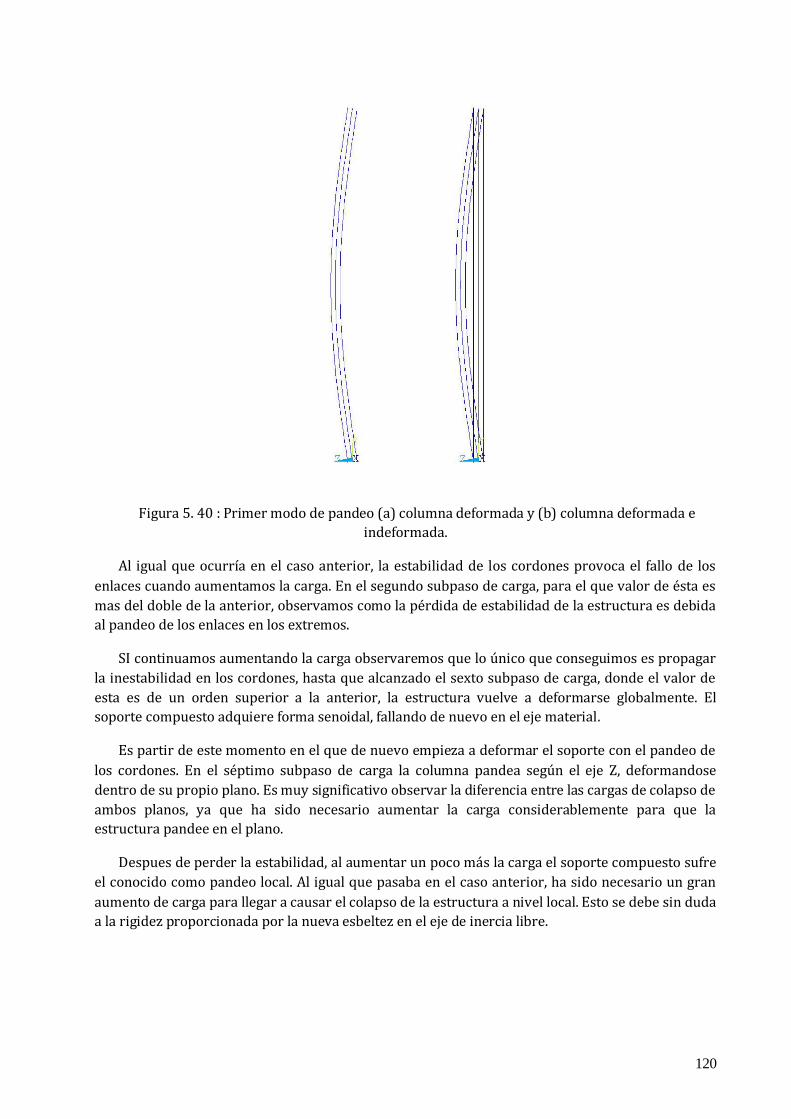
120
Figura 5. 40 : Primer modo de pandeo (a) columna deformada y (b) columna deformada e
indeformada.
Al igual que ocurría en el caso anterior, la estabilidad de los cordones provoca el fallo de los
enlaces cuando aumentamos la carga. En el segundo subpaso de carga, para el que valor de ésta es
mas del doble de la anterior, observamos como la pérdida de estabilidad de la estructura es debida
al pandeo de los enlaces en los extremos.
SI continuamos aumentando la carga observaremos que lo único que conseguimos es propagar
la inestabilidad en los cordones, hasta que alcanzado el sexto subpaso de carga, donde el valor de
esta es de un orden superior a la anterior, la estructura vuelve a deformarse globalmente. El
soporte compuesto adquiere forma senoidal, fallando de nuevo en el eje material.
Es partir de este momento en el que de nuevo empieza a deformar el soporte con el pandeo de
los cordones. En el séptimo subpaso de carga la columna pandea según el eje Z, deformandose
dentro de su propio plano. Es muy significativo observar la diferencia entre las cargas de colapso de
ambos planos, ya que ha sido necesario aumentar la carga considerablemente para que la
estructura pandee en el plano.
Despues de perder la estabilidad, al aumentar un poco más la carga el soporte compuesto sufre
el conocido como pandeo local. Al igual que pasaba en el caso anterior, ha sido necesario un gran
aumento de carga para llegar a causar el colapso de la estructura a nivel local. Esto se debe sin duda
a la rigidez proporcionada por la nueva esbeltez en el eje de inercia libre.

121
Figura 5. 41 : Segundo modo de pandeo . Pandeo de los enlaces, los cordones permanecen en la vertical.
Figura 5. 42 :Sexto modo de pandeo (a) columna deformada y (b) columna deformada e indeformada.

122
Figura 5. 44 :Octavo modo de pandeo (a) columna deformada, (b) columna deformada e
indeformada y (c) sección de la columna deformada con eje indeformado.
Figura 5. 43 :Séptimo modo de pandeo (a) columna deformada y (b) columna deformada e indeformada.
123
6. Resumen, Conclusiones y
Trabajos Futuros
6. 1 Resumen
Dado que la EAE nos permite llevar a cabo la comprobación de soportes compuestos metálicos
haciendo uso de métodos más avanzados, como resulta ser el MEF, se han querido resaltar las
diferencias entre el uso de un método normativo, teórico y MEF.
El objetivo principal de este proyecto era ver si el AEF nos proporciona resultados menos
conservadores que los derivados de la aplicación de la normativa. Por tanto, el propósito de este
proyecto ha sido estudiar las diferencias entre las cargas de colapso teóricas y numéricas. Las
cargas numéricas se han obtenido mediante análisis de pandeo lineal y no lineal, con MEF. Para
ellos se han realizado un análisis global de 1er orden incluyendo o no las imperfecciones
geométricas globales y un análisis global de 2° orden.
Para realizar este trabajo hemos comenzado por el estudio de las características principales de
los soportes compuesto metálicos, para después profundizar en la Teoría Clásica de Euler. Ésta se
caracteriza por el estudio del fenómeno de inestabilidad en columnas perfectas, idealizando el
problema. Es esto mismo lo que nos obliga a continuar nuestra profundización en el conocimiento
del fenómeno en cuestión, con el desarrollo de las diferencias entre el análisis lineal y no lineal. La
principal diferencia entre estos dos análisis, es la consideración o no, de que a través de todo el
proceso de deformación el modelo analizado mantiene la rigidez que poseía en la forma no
deformada.
Dicha consideración simplifica enormemente la formulación del problema y consecuentemente
también su solución. Solución válida únicamente cuando el sobredimensionado no tiene
importancia. Para reducir la diferencia entre la solución real e ideal, llevamos a cabo el análisis no
lineal. Por eso mismo desarrollaremos el comportamiento de la columna imperfecta.
Una vez terminado el recorrido por las teorías que sustentan los estudio y comprobaciones del
pandeo, presentamos los esquemas de resolución utilizados. Han sido éstos el normativo
(EC3,EAE), el teórico ([5]), y MEF.
Para llevar a cabo el AEF se hizo uso del software informático ANSYS, cuyos métodos de
resolución están basados en el MEF. Por eso se desarrollan las características del mismo en el
Capítulo 5, explicando brevemente el Método de Newton-Raphson para la resolución de problemas
no lineales, así como, las características de los elementos utilizados en ANSYS.
Posteriormente pasamos a la descripción de los modelos y parámetros, de los dos problemas a
resolver. Dando esto paso a las diferentes soluciones proporcionadas por los esquemas de
resolución antes comentados y poder así llevar a cabo el análisis de resultados. Destacamos tres
puntos de los distintos enfoques dados a los dos problemas:
124
Para cada problema hemos aplicado diferentes métodos, el teórico, el normativo y el
numérico.
Ambos problemas han sido resueltos según diferentes valores de la separación entre
cordones, luego se estudia también el colapso en relación a la esbeltez.
En ambos ejemplos, se han tenido en cuenta dos casos: Problema Lineal y Problema No
Lineal con no linealidad geométrica.
6. 2 Conclusiones
A la vista de los resultados obtenidos (Capítulo 5) y el trabajo realizado, hemos llegado a las
siguientes conclusiones:
La teoría clásica de Euler considera el pandeo según el eje material Y totalmente
independiente de la esbeltez del soporte, la carga crítica es constante aunque la
distancia entre cordones aumente. Mientras que por su parte, la carga crítica de pandeo
tanto global como local en Z tiene una proporción cuadrática con la misma.
Las cargas críticas resultantes de la aplicación de la teoría [5] son prácticamente iguales
a las obtenidas por MEF, esto hace evidente la adecuación de nuestro modelo MEF (2D)
a la realidad, ya que no sobredimensiona la estructura. Destacar también el hecho de
que dicha teoría supone las cargas de pandeo locales constantes, simplificación errónea
ya que esto supone despreciar el momento flector en los cordones.
Debería ser :
En lugar de,
Las restricciones impuestas por la normativa, derivadas del análisis considerando
efectos de 1er son tan severas que las cargas de colapso determinadas empleando su
metodología serán muy inferiores a las dos anteriores. El EC3 (EAE) tiene en cuenta las
posibles imperfecciones en la compresión en el soporte compuesto, aplicando un
coeficiente de amplificación al máximo momento flector en el centro de los elementos
compuestos, esto conlleva un aumento considerable en el esfuerzo axil de compresión
en los cordones. Además, en el cálculo del axil de resistencia de cálculo que supone la
limitación del axil de compresión en los cordones, emplea factores reductores de
pandeo. El valor de estos factores es menor cuanto mayor es la esbeltez, luego el límite
de compresión máximo en el cordón también es menor.
A pesar de todo esto, los valores de máximos de las cargas de colapso son las que
proporciona la Teoría de Euler, debido a la idealización del material. Para resolver con
MEF hemos usado elementos que se comportan siguiendo la Teoría de Timoshenko,
125
luego, esto hace que el factor de amplificación para un mismo valor de la esbeltez sea
inferior.
En cuanto al modelo utilizado en el problema 2D, destacar la convergencia en las
soluciones de cargas críticas globales haciendo uso de elementos BEAM188 y LINK1
para mallar los enlaces. Esto deja constancia de que cuando el colapso está ligado al
fallo global de la estructura, el hecho de tener enlaces de uniones rígidas y que
consideran la flexión, o enlaces de uniones articuladas y que por lo tanto no consideran
los efectos de flexión, no afecta prácticamente nada el resultado.
6. 3 Trabajos Futuros
Hablando sobre el modelo MEF creado para la resolución del Ejemplo 1, es importante resaltar
la diferencia en el uso de elementos LINK o BEAM para modelar los enlaces cuando lo que se busca
es determinar las cargas de pandeo de pandeo locales. Los elementos BEAM188 sobredimensionan
el valor de ésta en más del doble.
A la vista de resultados obtenidos y conclusiones, se propone por tanto como futuro trabajo:
El estudio en profundidad de la influencia del tipo de elemento para modelar los enlaces
de los soportes compuestos.
Optimización del modelo 3D haciendo uso de elementos Shell para el modelado tanto de
cordones como enlaces.
Análisis de sensibilidad de la malla utilizada en este proyecto, buscando determinar
posibles mejoras que deriven en una optimización de los resultados.
Ampliación del análisis no lineal con el estudio del análisis con no linealidad del
material. Pudiéndose también considerar la posible aplicación de materiales con
propiedades diferentes en enlaces y cordones.
Estudio de otros soportes compuestos, como los de tipología empresillados.
Estudio de soportes compuestos de geometría más compleja, con N cordones, siendo
N = 3, 4, ó 5.

126
7. Bibliografía
[1] R. Argüelles Álvarez, R. Argüelles Bustillo, E. Arriaga, J.R. Atienza y J.J. Martínez.
Estructuras de acero II: Uniones y sistemas estructurales. Librería Técnica Bellisco,
(2001).
[2] P. Ariza y A Sáez. Método de los Elementos Finitos, Introducción a ANSYS. Publicaciones
de la Universidad de Sevilla, Manuales Universitarios (1999).
[3] A. Chajes, “Principles of Structural Theory”. Prentice-Hall (1974).
[4] J. Domínguez . Ampliación de Teoría de Estructuras. Publicaciones de la Universidad de
Sevilla, 5: 57-78.
[5] E. Kalochairetis, J. Gantes. Numerical and analytical investigatigation of collapse loads of
laced built-up columns . Computers and Structures 89 (2011) : 1166-1176.
[6] E. Madenci y I. Guven. The Finite Element Method Applications in Engineering using
ANSYS. Springer (2007).
[7] Ministerio de Fomento. Instrucción de Acero Estructural. 3º ed. Noviembre 2012.
[8] S.P. Timoshenko y J.M. Gere. Theory of Elastic Stability. Mc Graw-Hill (1961).
[9] University of Alberta. ANSYS Tutorials.

127
ANEXOS
128
ANEXO I : FICHEROS DE COMANDOS PARA ANSYS
I . Problema 2D sólo BEAM188
FINISH
/CLEAR
/FILNAME, pandeo,1
/Prep7
!------------------------------------
!Geometria del problema
!------------------------------------
a = 1500 !Distancia Vertical entre puntos de arriostramiento en mm
ho = 544 !Distancia Horizontal entre cordones en mm
L = 13500 !Longitud total del soporte en mm
!------------------------------------
!Definicion SECCION y ELEMENTO
!------------------------------------
!!area = 28.5e2 !area de la seccion en mm2
!!I = 142e4 !Inercia de la seccion en mm4
h = 200 !Canto del perfil en mm
w1 = 100
w2 = w1
w3 = 200
t1 = 8.5
t2 = t1
t3 = 5.6
SECTYPE,1,BEAM,I,CORDONES,0
SECDATA,w1,w2,w3,t1,t2,t3 !IPE200
Bd = 12
Hd = 60
SECTYPE,2,BEAM,RECT,ENLACES,0
SECDATA,Hd,Bd
ET,1,BEAM188
!------------------------------------
!Definicion MATERIAL
!------------------------------------
MP,EX,1,210e3 !Modulo elástico en MPa (N/mm2)
MP,PRXY,1,0.3
129
MP,DENS,1,7850*1e-8 !densidad del acero en N/mm3
!------------------------------------
! Geometria
!------------------------------------
K,1,0,0,
K,2,0,a
L,1,2
LGEN,L/a,1,,,0,a,0
LGEN,2,ALL,,,ho,0,0
NUMMRG,KP
K,100,ho/2,a/2 !punto central donde cruzan las barras de
enlace
L,1,100
L,100,20
L,19,100
L,100,2
NUMMRG,KP
LGEN,L/a,19,,,0,a,0
LGEN,L/a,20,,,0,a,0
LGEN,L/a,21,,,0,a,0
LGEN,L/a,22,,,0,a,0
NUMMRG,KP !Hace que los KP coincidentes sean uno solo
N,1,ho/2,0,0 !Nodos donde imponer CC
N,2,ho/2,L,0
!------------------------------------
! Mallado
!------------------------------------
LSEL,S,LINE,,1,18
LATT,1, ,1,,,,1
LESIZE,ALL,,,5
allsel
LSEL,S,LINE,,19,54
LATT,1, ,1,,,,2
LESIZE,ALL,,,10
allsel
LMESH,ALL
e,2,44 !Creacion de elementos rigidos en los extremos.
e,2,90
e,1,49
e,1,3

130
!-----------------------------------
! CERIG
!-----------------------------------
CERIG,2,44,UX, , , ,
CERIG,2,44,UY, , , ,
CERIG,2,44,UZ, , , ,
CERIG,2,90,UX, , , ,
CERIG,2,90,UY, , , ,
CERIG,2,90,UZ, , , ,
CERIG,1,49,UX, , , ,
CERIG,1,49,UY, , , ,
CERIG,1,49,UZ, , , ,
CERIG,1,3,UX, , , ,
CERIG,1,3,UY, , , ,
CERIG,1,3,UZ, , , ,
!------------------------------------
! Cargas
!------------------------------------
F,2,FY,-1 !Carga en el NODO
!------------------------------------
! Condiciones de Contorno
!------------------------------------
D,1,UX,0
D,1,UY,0
D,2,UX,0
D,ALL,UZ,0, !condiciones de contorno que obligan la estructura a
permanecer en el plano XY
D,ALL,ROTX,0,
D,ALL,ROTY,0
finish
!------------------------------------
! Tipo de Análisis y SOLUCION
!------------------------------------
/solu
ANTYPE,STATIC
PSTRES,ON
solve
finish

131
/SOLU
ANTYPE,BUCKLE
BUCOPT,LANB,10
MXPAND,10
SOLVE
FINISH
/POST1
SET,LIST
SET,FIRST
PLDISP
PRNSOL,DOF !Obtención de los desplazamientos
*Get,pcrit,active,0,set,freq
C*************************************************************
C****** Pandeo no lineal incluyendo imperfecciones
C*************************************************************
/prep7
f_amp =27 !Imperfeccion inicial
UPGEOM,f_amp,1,1,pandeo,rst,
/prep7
FKDELE,all,all !Borramos cargas aplicadas anteriormente
f_carga = 2 !Factor por el que multiplicamos la carga Critica a aplicar
F,2,FY,-pcrit*f_carga
!-----------------------------------------------
! Definicion del tipo de Analisis
!-----------------------------------------------
/SOLU
ANTYPE,STATIC
NLGEOM,ON
NSUBST,AUTOTS,150000,1
OUTRES,ALL,ALL
NROPT,FULL
SOLVE
FINISH

132
!---------------------------------------------------------------------
Representación Gráfica del desplazamiento frente a la carga
!---------------------------------------------------------------------
/POST26
FILE,pandeo,rst,,
RFORCE,2,1,F,Y
NSOL,3,26,U,x !este nodo tiene que ser el de max U para que la
representacion grafica tenga sentido
ABS,4,3,,,UX_max
PLTIME,,,
/COLOR,CURVE,BLUE,1,,,
/COLOR,GRBAK,WHIT,,,,
XVAR,4
/AXLAB,X,Flecha - Desplazamientos segun X
/AXLAB,Y,Carga aplicada
PLVAR,2
I I. Problema 2D con BEAM188 y LINK1
Para resolver el problema usando BEAM188 y LINK1 solo tenemos que definir un segundo elemento al que proporcionarle una constante real con los datos de la sección de los enlaces. Después en el mallado, seleccionar cuidadosamente las diagonales que estarán malladas con LINK1. El resto del código es idéntico.
!------------------------------------
! Definicion de LOS ELEMENTOS
!------------------------------------
R,1,720,, !area de la seccion de los enlaces
REAL,2 !adjudicamos el valor de la Real Constant al Element 2
ET,1,BEAM188
ET,2,LINK1
!------------------------------------
! Mallado
!------------------------------------
LSEL,S,LINE,,1,18 !El mallado de los cordones no cambia
LATT,1, ,1,,,,1
LESIZE,ALL,,,10
allsel
LSEL,S,LINE,,19,54 !el mallado de los enlaces ahora ha cambiado
LATT,1,1,2,,,,
LESIZE,ALL,,,1
allsel
LMESH,ALL

133
I I. Problema 3D
En este problema lo único que cambia es la geometría inicial , así como la creación de elementos rígidos. Para el análisis tanto lineal como no lineal el código es exactamente el mismo.
FINISH
/CLEAR
/FILNAME, pandeo,1
/Prep7
!------------------------------------
!Geometria del problema
!------------------------------------
a = 1000 !Distancia Vertical entre puntos de
arriostramiento en mm
ho = 400 !Distancia Horizontal entre cordones en mm
L = 10000 !Longitud total del soporte en mm
!------------------------------------
!Definicion SECCION Y ELEMENTOS
!------------------------------------
h = 270 !Canto del perfil en mm
!IPE270
w1 = 135
w2 = w1
w3 = 270
t1 = 10.7
t2 = t1
t3 = 7.1
SECTYPE,1,BEAM,I,CORDONES,0
SECDATA,w1,w2,w3,t1,t2,t3
Hd = 60
Bd = 30
SECTYPE,2,BEAM,RECT,ENLACES,0
SECDATA,Hd,Bd
ET,1,BEAM188
!------------------------------------
!Definicion MATERIAL
!------------------------------------
MP,EX,1,210e3 !Modulo elástico en MPa (N/mm2)
MP,PRXY,1,0.3
MP,DENS,1,7850*1e-8 !densidad del acero en N/mm3
134
!------------------------------------
! Geometria
!------------------------------------
K,1,0,0,
K,2,0,a
L,1,2
LGEN,L/a,1,,,0,a,0
LGEN,2,ALL,,,ho,0,0
NUMMRG,KP !Hace que los KP coincidentes sean uno solo
K,3,0,0,h/2
K,5,0,a,h/2
K,7,ho/2,a/2,h/2 !punto central donde cruzan las
barras de enlace
L,3,7
L,7,5
LGEN,L/a,21,,,0,a,0
LGEN,L/a,22,,,0,a,0
NUMMRG,KP
K,44,ho,0,h/2
K,45,ho,a,h/2
L,44,7
L,7,45
LGEN,L/a,41,,,0,a,0
LGEN,L/a,42,,,0,a,0
NUMMRG,KP
K,45,0,0,-h/2
K,46,0,a,-h/2
K,48,ho/2,a/2,-h/2
L,45,48
L,48,46
LGEN,L/a,61,,,0,a,0
LGEN,L/a,62,,,0,a,0
NUMMRG,KP
K,75,ho,0,-h/2
K,76,ho,a,-h/2 !punto central donde cruzan
las barras de enlace
L,75,48
L,48,76
LGEN,L/a,81,,,0,a,0
LGEN,L/a,82,,,0,a,0
NUMMRG,KP
N,1,ho/2,0,0 !Nodos donde imponer CC
N,2,ho/2,L,0

135
!------------------------------------
! Mallado
!------------------------------------
LSEL,S,LINE,,1,20 !mallado de los cordones
LATT,1,,1,,,,1
LESIZE,ALL,,,5
allsel
LSEL,S,LINE,,21,100 !mallado de los enlaces
LATT,1,,1,,,,2
LESIZE,ALL,,,5
allsel
LMESH,ALL
e,1,3 !elementos rigidos en los extremos
e,1,54
e,2,100
e,2,49
!-----------------------------------
! CERIG
!-----------------------------------
CERIG,1,3,UX, , , ,
CERIG,1,3,UY, , , ,
CERIG,1,3,UZ, , , ,
CERIG,1,54,UX, , , ,
CERIG,1,54,UY, , , ,
CERIG,1,54,UZ, , , ,
CERIG,2,100,UX, , , ,
CERIG,2,100,UY, , , ,
CERIG,2,100,UZ, , , ,
CERIG,2,49,UX, , , ,
CERIG,2,49,UY, , , ,
CERIG,2,49,UZ, , , ,
!!!------
CERIG,100,484,UX, , , ,
CERIG,100,484,UY, , , ,
CERIG,100,484,UZ, , , ,
CERIG,100,292,UX, , , ,
CERIG,100,292,UY, , , ,
CERIG,100,292,UZ, , , ,
CERIG,49,393,UX, , , ,
CERIG,49,393,UY, , , ,
CERIG,49,393,UZ, , , ,
CERIG,49,201,UX, , , ,
CERIG,49,201,UY, , , ,
CERIG,49,201,UZ, , , ,
!!!------
CERIG,95,447,UX, , , ,
CERIG,95,447,UY, , , ,

136
CERIG,95,447,UZ, , , ,
CERIG,95,255,UX, , , ,
CERIG,95,255,UY, , , ,
CERIG,95,255,UZ, , , ,
CERIG,44,163,UX, , , ,
CERIG,44,163,UY, , , ,
CERIG,44,163,UZ, , , ,
CERIG,44,355,UX, , , ,
CERIG,44,355,UY, , , ,
CERIG,44,355,UZ, , , ,
!!!------
CERIG,90,442,UX, , , ,
CERIG,90,442,UY, , , ,
CERIG,90,442,UZ, , , ,
CERIG,90,250,UX, , , ,
CERIG,90,250,UY, , , ,
CERIG,90,250,UZ, , , ,
CERIG,39,157,UX, , , ,
CERIG,39,157,UY, , , ,
CERIG,39,157,UZ, , , ,
CERIG,39,349,UX, , , ,
CERIG,39,349,UY, , , ,
CERIG,39,349,UZ, , , ,
!!!------
CERIG,34,151,UX, , , ,
CERIG,34,151,UY, , , ,
CERIG,34,151,UZ, , , ,
CERIG,34,343,UX, , , ,
CERIG,34,343,UY, , , ,
CERIG,34,343,UZ, , , ,
CERIG,85,245,UX, , , ,
CERIG,85,245,UY, , , ,
CERIG,85,245,UZ, , , ,
CERIG,85,437,UX, , , ,
CERIG,85,437,UY, , , ,
CERIG,85,437,UZ, , , ,
!!!------
CERIG,29,145,UX, , , ,
CERIG,29,145,UY, , , ,
CERIG,29,145,UZ, , , ,
CERIG,29,337,UX, , , ,
CERIG,29,337,UY, , , ,
CERIG,29,337,UZ, , , ,
CERIG,80,240,UX, , , ,
CERIG,80,240,UY, , , ,
CERIG,80,240,UZ, , , ,
CERIG,80,432,UX, , , ,
CERIG,80,432,UY, , , ,
CERIG,80,432,UZ, , , ,
137
!!------
CERIG,75,235,UX, , , ,
CERIG,75,235,UY, , , ,
CERIG,75,235,UZ, , , ,
CERIG,75,427,UX, , , ,
CERIG,75,427,UY, , , ,
CERIG,75,427,UZ, , , ,
CERIG,24,139,UX, , , ,
CERIG,24,139,UY, , , ,
CERIG,24,139,UZ, , , ,
CERIG,24,331,UX, , , ,
CERIG,24,331,UY, , , ,
CERIG,24,331,UZ, , , ,
!!!------
CERIG,70,230,UX, , , ,
CERIG,70,230,UY, , , ,
CERIG,70,230,UZ, , , ,
CERIG,70,422,UX, , , ,
CERIG,70,422,UY, , , ,
CERIG,70,422,UZ, , , ,
CERIG,19,133,UX, , , ,
CERIG,19,133,UY, , , ,
CERIG,19,133,UZ, , , ,
CERIG,19,325,UX, , , ,
CERIG,19,325,UY, , , ,
CERIG,19,325,UZ, , , ,
!!!------
CERIG,65,225,UX, , , ,
CERIG,65,225,UY, , , ,
CERIG,65,225,UZ, , , ,
CERIG,65,417,UX, , , ,
CERIG,65,417,UY, , , ,
CERIG,65,417,UZ, , , ,
CERIG,14,127,UX, , , ,
CERIG,14,127,UY, , , ,
CERIG,14,127,UZ, , , ,
CERIG,14,319,UX, , , ,
CERIG,14,319,UY, , , ,
CERIG,14,319,UZ, , , ,
!!!------
CERIG,60,220,UX, , , ,
CERIG,60,220,UY, , , ,
CERIG,60,220,UZ, , , ,
CERIG,60,412,UX, , , ,
CERIG,60,412,UY, , , ,
CERIG,60,412,UZ, , , ,
CERIG,9,121,UX, , , ,
CERIG,9,121,UY, , , ,
CERIG,9,121,UZ, , , ,
CERIG,9,313,UX, , , ,
CERIG,9,313,UY, , , ,
138
CERIG,9,313,UZ, , , ,
!!!------
CERIG,55,211,UX, , , ,
CERIG,55,211,UY, , , ,
CERIG,55,211,UZ, , , ,
CERIG,55,403,UX, , , ,
CERIG,55,403,UY, , , ,
CERIG,55,403,UZ, , , ,
CERIG,4,111,UX, , , ,
CERIG,4,111,UY, , , ,
CERIG,4,111,UZ, , , ,
CERIG,4,303,UX, , , ,
CERIG,4,303,UY, , , ,
CERIG,4,303,UZ, , , ,
!!!------
CERIG,54,206,UX, , , ,
CERIG,54,206,UY, , , ,
CERIG,54,206,UZ, , , ,
CERIG,54,398,UX, , , ,
CERIG,54,398,UY, , , ,
CERIG,54,398,UZ, , , ,
CERIG,3,105,UX, , , ,
CERIG,3,105,UY, , , ,
CERIG,3,105,UZ, , , ,
CERIG,3,297,UX, , , ,
CERIG,3,297,UY, , , ,
CERIG,3,297,UZ, , , ,
!------------------------------------
! Cargas
!------------------------------------
F,2,FY,-1 !Carga en el NODO
!!F,2,MZ,100 !Carga en el NODO
!------------------------------------
! Condiciones de Contorno
!------------------------------------
D,1,UX,0
D,1,UY,0
D,1,UZ,0
D,1,ROTY,0
D,2,UX,0
D,2,UZ,0
D,2,ROTY,0
LSEL,S,LOC,Z,0 ! Condiciones de contorno para imperdir los giros
ESLL,S
NSLE,S
D,all,ROTY,0
allsel
finish

139