tesystltmr doca0130es 12/2017 tesystltmr
TRANSCRIPT

TeSys T LTMR
DOCA0130ES 12/2017
DO
A013
0ES-
01
www.schneider-electric.com
TeSys T LTMRControlador de gestión de motores Guía de comunicación Modbus07/2018
La información que se ofrece en esta documentación contiene descripciones de carácter general y/o características técnicas sobre el rendimiento de los productos incluidos en ella. La presente documentación no tiene como objeto sustituir dichos productos para aplicaciones de usuario específicas, ni debe emplearse para determinar su idoneidad o fiabilidad. Los usuarios o integradores tienen la responsabilidad de llevar a cabo un análisis de riesgos adecuado y completo, así como la evaluación y las pruebas de los productos en relación con la aplicación o el uso de dichos productos en cuestión. Ni Schneider Electric ni ninguna de sus filiales o asociados asumirán responsabilidad alguna por el uso inapropiado de la información contenida en este documento. Si tiene sugerencias de mejoras o modifica-ciones o ha hallado errores en esta publicación, le rogamos que nos lo notifique. Usted se compromete a no reproducir, salvo para su propio uso personal, no comercial, la totalidad o parte de este documento en ningún soporte sin el permiso de Schneider Electric, por escrito. También se compromete a no establecer ningún vínculo de hipertexto a este documento o su contenido. Schneider Electric no otorga ningún derecho o licencia para el uso personal y no comercial del documento o de su contenido, salvo para una licencia no exclusiva para consultarla "tal cual", bajo su propia responsabilidad. Todos los demás derechos están reservados.Al instalar y utilizar este producto es necesario tener en cuenta todas las regulaciones sobre seguridad correspondientes, ya sean regionales, locales o estatales. Por razones de seguridad y para garantizar que se siguen los consejos de la documentación del sistema, las reparaciones solo podrá realizarlas el fabricante.Cuando se utilicen dispositivos para aplicaciones con requisitos técnicos de seguridad, siga las instrucciones pertinentes. Si con nuestros productos de hardware no se utiliza el software de Schneider Electric u otro software aprobado, pueden producirse lesiones, daños o un funcionamiento incorrecto del equipo.Si no se tiene en cuenta esta información, se pueden causar daños personales o en el equipo.© 2018 Schneider Electric. Reservados todos los derechos.
2 DOCA0130ES-01 07/2018

Tabla de materias
Información de seguridad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5Acerca de este libro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Capítulo 1 Introducción al Sistema de gestión de motores TeSys T . . . . . . . . . . . . . . 9Presentación del sistema de gestión de motores TeSys T . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Capítulo 2 Cableado de la red Modbus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11Características de la red Modbus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12Características del terminal de cableado del puerto de comunicación Modbus . . . . . . . . . . 13Cableado de la red Modbus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Capítulo 3 Uso de la red de comunicación Modbus. . . . . . . . . . . . . . . . . . . . . . . . . . . 21Principio del protocolo Modbus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23Configuración del puerto de red LTMRModbus del . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24Comprobación de la comunicación Modbus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25Control y supervisión simplificadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27Solicitudes Modbus y ejemplos de programación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28Gestión de excepciones Modbus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29Variables de mapa de usuario (Registros indirectos definidos por el usuario) . . . . . . . . . . . 30Mapa de registros (Organización de variables de comunicación) . . . . . . . . . . . . . . . . . . . . 31Formatos de los datos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32Tipos de datos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33Variables de identificación. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39Variables históricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40Variables de supervisión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46Variables de configuración . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52Variables de comandos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59Variables de mapa de usuario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60Variables de lógica personalizada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Glosario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63Índice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
DOCA0130ES-01 07/2018 3

4 DOCA0130ES-01 07/2018
Información de seguridad
Información importante
AVISOLea atentamente estas instrucciones y observe el equipo para familiarizarse con el dispositivo antes de instalarlo, utilizarlo, revisarlo o realizar su mantenimiento. Los mensajes especiales que se ofrecen a continuación pueden aparecer a lo largo de la documentación o en el equipo para advertir de peligros potenciales, o para ofrecer información que aclara o simplifica los distintos procedimientos.
TENGA EN CUENTA LO SIGUIENTE:La instalación, el manejo, las revisiones y el mantenimiento de equipos eléctricos deberán ser realizados sólo por personal cualificado. Schneider Electric no se hace responsable de ninguna de las consecuencias del uso de este material.Una persona cualificada es aquella que cuenta con capacidad y conocimientos relativos a la construcción, el funcionamiento y la instalación de equipos eléctricos, y que ha sido formada en materia de seguridad para reconocer y evitar los riesgos que conllevan tales equipos.
DOCA0130ES-01 07/2018 5

6 DOCA0130ES-01 07/2018

Acerca de este libro
Presentación
Objeto
En esta guía se describe la versión del protocolo de red Modbus® del controlador de gestión de motores TeSys™ T LTMR y del módulo de expansión LTME.La finalidad de esta guía es: Describir y explicar las funciones de supervisión, protección y control del controlador LTMR y el módulo
de expansión LTME. Proporcionar toda la información necesaria para implementar y respaldar una solución que se adapte
lo mejor posible a los requisitos de su aplicación.En la guía se describen las cuatro partes principales de una implementación satisfactoria del sistema: Instalación del controlador LTMR y el módulo de expansión LTME. Puesta en marcha del controlador LTMR mediante el ajuste de los parámetros esenciales. Uso del controlador LTMR y del módulo de expansión LTME, con y sin otros dispositivos de interfaz
hombre-máquina adicionales Mantenimiento del controlador LTMR y el módulo de expansión LTME.Esta guía va dirigida a: ingenieros de diseño integradores de sistemas operadores de sistemas Ingenieros de mantenimiento
Campo de aplicaciónEsta guía es válida para los controladores LTMR Modbus. Algunas funciones están disponibles dependiendo de la versión del software del controlador.
Documentos relacionados
Título de la documentación Descripción Número de referenciaTeSys T LTMR - Controlador de gestión de motores - Guía del usuario
Es la guía del usuario principal que presenta la gama TeSys T completa y describe las principales funciones del controlador de gestión de motores TeSys T LTMR y el módulo de expansión LTME.
DOCA0127ES
TeSys T LTMR - Controlador de gestión de motores - Guía de instalación
En esta guía se describe la instalación, la puesta en marcha y el mantenimiento del controlador de gestión de motores TeSys T LTMR y del módulo de expansión LTME.
DOCA0128ES
TeSys T LTMR - Controlador de gestiónde motores - Guía de comunicación Ethernet
En esta guía se describe la versión del protocolo de red Ethernet del controlador de gestión de motores TeSys T LTMR.
DOCA0129ES
TeSys T LTMR - Controlador de gestiónde motores - Guía de comunicación PROFIBUS DP
En esta guía se describe la versión del protocolo de red PROFIBUS-DP del controlador de gestión de motores TeSys T LTMR.
DOCA0131ES
TeSys T LTMR - Controlador de gestiónde motores - Guía de comunicación CANopen
En esta guía se describe la versión del protocolo de red CANopen del controlador de gestión de motores TeSys T LTMR.
DOCA0132ES
TeSys T LTMR - Controlador de gestiónde motores - Guía de comunicación DeviceNet
En esta guía se describe la versión del protocolo de red DeviceNet del controlador de gestión de motores TeSys T LTMR.
DOCA0133ES
TeSys® T LTM CU - Unidad de operadorde control - Manual del usuario
En este manual se describe cómo instalar, configurar y usar la unidad de operador de control TeSys T LTMCU.
1639581ES
Compact Display Units - Magelis XBTN/XBT R - User Manual
En este manual se describen las características y la presentación de las unidades de visualización XBT N/XBT R.
1681029EN
DOCA0130ES-01 07/2018 7
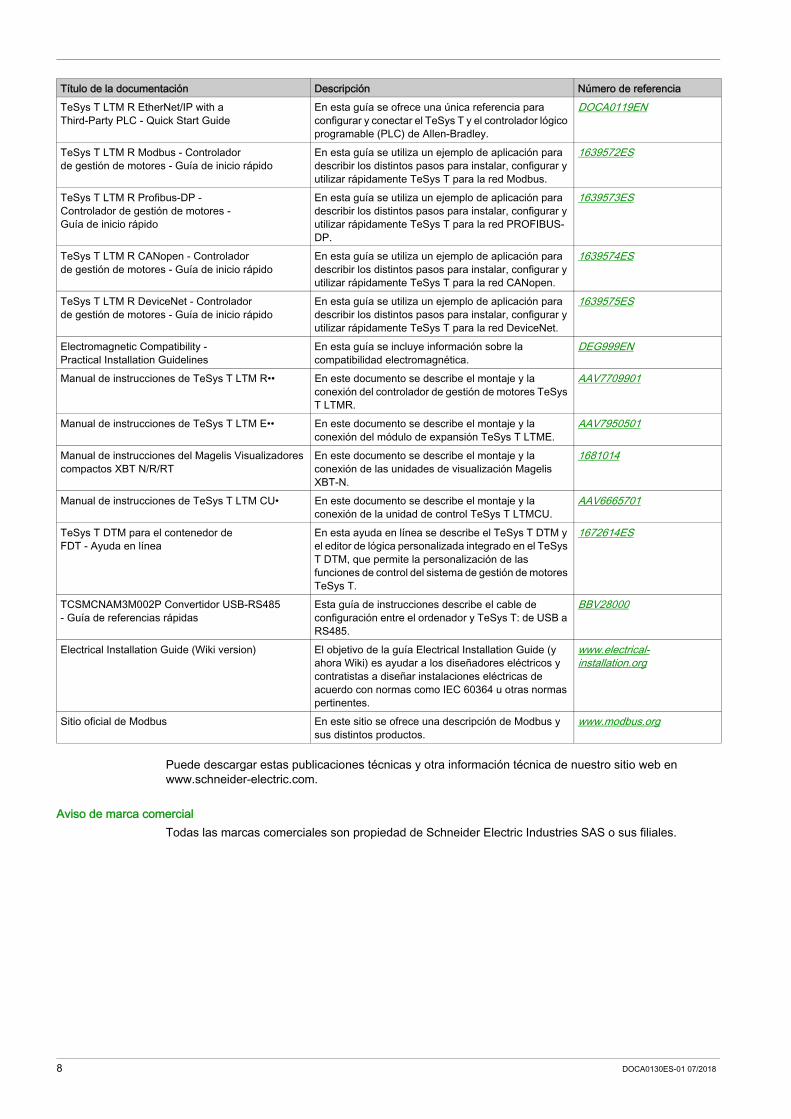
Puede descargar estas publicaciones técnicas y otra información técnica de nuestro sitio web en www.schneider-electric.com.
Aviso de marca comercialTodas las marcas comerciales son propiedad de Schneider Electric Industries SAS o sus filiales.
TeSys T LTM R EtherNet/IP with aThird-Party PLC - Quick Start Guide
En esta guía se ofrece una única referencia para configurar y conectar el TeSys T y el controlador lógico programable (PLC) de Allen-Bradley.
DOCA0119EN
TeSys T LTM R Modbus - Controladorde gestión de motores - Guía de inicio rápido
En esta guía se utiliza un ejemplo de aplicación para describir los distintos pasos para instalar, configurar y utilizar rápidamente TeSys T para la red Modbus.
1639572ES
TeSys T LTM R Profibus-DP -Controlador de gestión de motores -Guía de inicio rápido
En esta guía se utiliza un ejemplo de aplicación para describir los distintos pasos para instalar, configurar y utilizar rápidamente TeSys T para la red PROFIBUS-DP.
1639573ES
TeSys T LTM R CANopen - Controladorde gestión de motores - Guía de inicio rápido
En esta guía se utiliza un ejemplo de aplicación para describir los distintos pasos para instalar, configurar y utilizar rápidamente TeSys T para la red CANopen.
1639574ES
TeSys T LTM R DeviceNet - Controladorde gestión de motores - Guía de inicio rápido
En esta guía se utiliza un ejemplo de aplicación para describir los distintos pasos para instalar, configurar y utilizar rápidamente TeSys T para la red DeviceNet.
1639575ES
Electromagnetic Compatibility -Practical Installation Guidelines
En esta guía se incluye información sobre la compatibilidad electromagnética.
DEG999EN
Manual de instrucciones de TeSys T LTM R•• En este documento se describe el montaje y la conexión del controlador de gestión de motores TeSys T LTMR.
AAV7709901
Manual de instrucciones de TeSys T LTM E•• En este documento se describe el montaje y la conexión del módulo de expansión TeSys T LTME.
AAV7950501
Manual de instrucciones del Magelis Visualizadores compactos XBT N/R/RT
En este documento se describe el montaje y la conexión de las unidades de visualización Magelis XBT-N.
1681014
Manual de instrucciones de TeSys T LTM CU• En este documento se describe el montaje y la conexión de la unidad de control TeSys T LTMCU.
AAV6665701
TeSys T DTM para el contenedor deFDT - Ayuda en línea
En esta ayuda en línea se describe el TeSys T DTM y el editor de lógica personalizada integrado en el TeSys T DTM, que permite la personalización de las funciones de control del sistema de gestión de motores TeSys T.
1672614ES
TCSMCNAM3M002P Convertidor USB-RS485- Guía de referencias rápidas
Esta guía de instrucciones describe el cable de configuración entre el ordenador y TeSys T: de USB a RS485.
BBV28000
Electrical Installation Guide (Wiki version) El objetivo de la guía Electrical Installation Guide (y ahora Wiki) es ayudar a los diseñadores eléctricos y contratistas a diseñar instalaciones eléctricas de acuerdo con normas como IEC 60364 u otras normas pertinentes.
www.electrical-installation.org
Sitio oficial de Modbus En este sitio se ofrece una descripción de Modbus y sus distintos productos.
www.modbus.org
Título de la documentación Descripción Número de referencia
8 DOCA0130ES-01 07/2018

TeSys T LTMRIntroducción al Sistema de gestión de motores TeSys TDOCA0130ES 12/2017
Introducción al Sistema de gestión de motores TeSys T
Capítulo 1Introducción al Sistema de gestión de motores TeSys T
Presentación del sistema de gestión de motores TeSys T
Objetivo del productoEl sistema de gestión de motores TeSys T ofrece prestaciones de protección, control y supervisión para los motores de inducción de AC monofásicos y trifásicos.Al tratarse de un sistema modular y flexible, se puede configurar para satisfacer los requisitos de las aplicaciones industriales. El sistema está diseñado para satisfacer las necesidades de los sistemas de protección integrados con comunicaciones abiertas y una arquitectura global.La alta precisión de los sensores y la total protección electrónica de estado sólido del motor garantizan la mejor utilización del motor. Las completas funciones de supervisión permiten analizar las condiciones de funcionamiento del motor y responder de forma más rápida para impedir la parada del sistema.El sistema ofrece funciones de diagnóstico e históricos, así como advertencias y fallos configurables, lo que permite predecir de forma óptima el mantenimiento de los componentes, y proporciona datos para mejorar continuamente todo el sistema.Para obtener más información detallada sobre el producto, consulte la publicación TeSys T LTMR Motor Management Controller User Guide.
DOCA0130ES-01 07/2018 9

Introducción al Sistema de gestión de motores TeSys T
10 DOCA0130ES-01 07/2018
TeSys T LTMRCableado de la red ModbusDOCA0130ES 12/2017
Cableado de la red Modbus
Capítulo 2Cableado de la red Modbus
Descripción generalEn este capítulo se describe cómo conectar un controlador LTMR a una red Ethernet una red Modbus RS 485 con un RJ45 o un conector de tipo abierto.Se presentan tres topologías de red posibles.
(1) Para más información, consulte NEMA ICS 1.1 (última edición), "Safety Guidelines for the Application, Installation, and Maintenance of Solid State Control" (Directrices de seguridad para la aplicación, la instalación y el mantenimiento del control de estado sólido).
Contenido de este capítuloEste capítulo contiene los siguientes apartados:
ADVERTENCIAPÉRDIDA DE CONTROL El diseñador del esquema de control debe tener en cuenta los modos de fallo de rutas de control
posibles y, para ciertas funciones críticas, proporcionar los medios para lograr un estado seguro durante y después de un fallo de ruta. Ejemplos de funciones críticas de control son la parada de emergencia y la parada de sobrerrecorrido.
Para las funciones críticas de control deben proporcionarse rutas de control separadas o redundantes.
Las rutas de control del sistema pueden incluir enlaces de comunicación. Deben tenerse en cuenta las implicaciones de retardos o fallos de transmisión no anticipados del enlace (1).
Cada implementación de un controlador LTMR debe probarse de forma individual y exhaustiva para comprobar su funcionamiento correcto antes de ponerse en servicio.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
Apartado PáginaCaracterísticas de la red Modbus 12Características del terminal de cableado del puerto de comunicación Modbus 13Cableado de la red Modbus 15
DOCA0130ES-01 07/2018 11
Cableado de la red Modbus
Características de la red Modbus
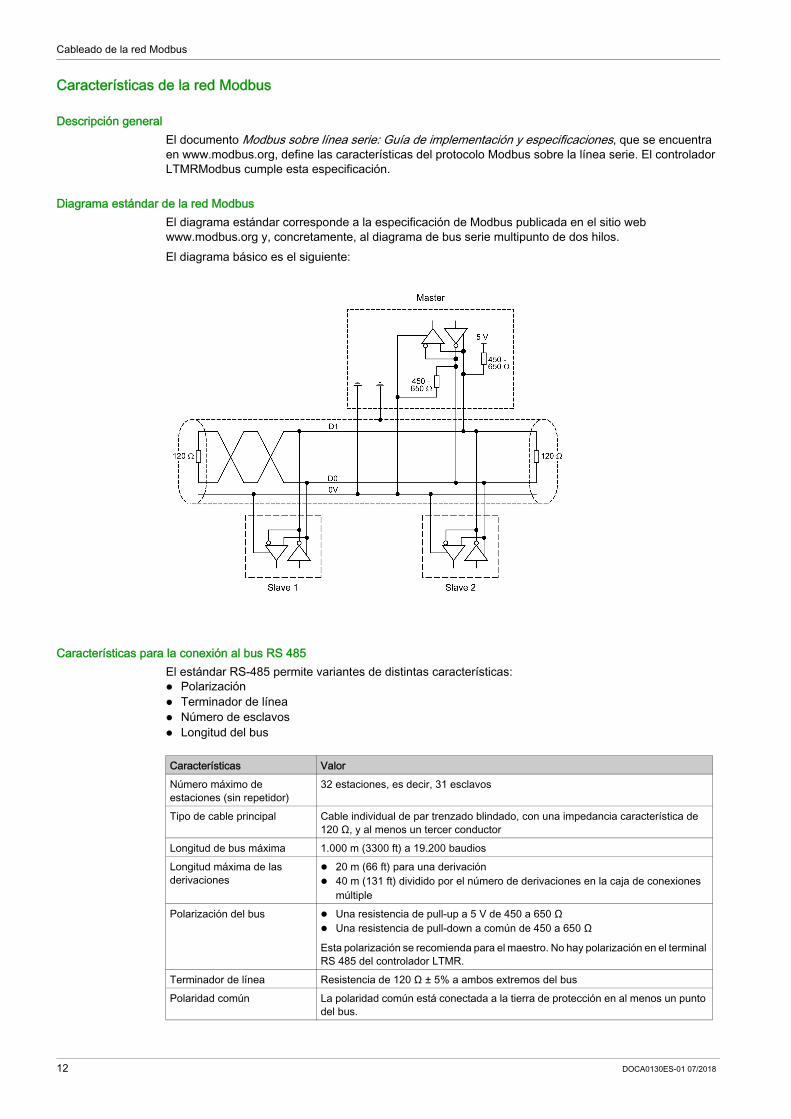
Descripción generalEl documento Modbus sobre línea serie: Guía de implementación y especificaciones, que se encuentra en www.modbus.org, define las características del protocolo Modbus sobre la línea serie. El controlador LTMRModbus cumple esta especificación.
Diagrama estándar de la red ModbusEl diagrama estándar corresponde a la especificación de Modbus publicada en el sitio web www.modbus.org y, concretamente, al diagrama de bus serie multipunto de dos hilos.El diagrama básico es el siguiente:
Características para la conexión al bus RS 485El estándar RS-485 permite variantes de distintas características: Polarización Terminador de línea Número de esclavos Longitud del bus
Características ValorNúmero máximo de estaciones (sin repetidor)
32 estaciones, es decir, 31 esclavos
Tipo de cable principal Cable individual de par trenzado blindado, con una impedancia característica de 120 Ω, y al menos un tercer conductor
Longitud de bus máxima 1.000 m (3300 ft) a 19.200 baudiosLongitud máxima de las derivaciones
20 m (66 ft) para una derivación 40 m (131 ft) dividido por el número de derivaciones en la caja de conexiones
múltiplePolarización del bus Una resistencia de pull-up a 5 V de 450 a 650 Ω
Una resistencia de pull-down a común de 450 a 650 Ω
Esta polarización se recomienda para el maestro. No hay polarización en el terminal RS 485 del controlador LTMR.
Terminador de línea Resistencia de 120 Ω ± 5% a ambos extremos del busPolaridad común La polaridad común está conectada a la tierra de protección en al menos un punto
del bus.
12 DOCA0130ES-01 07/2018

Cableado de la red Modbus
Características del terminal de cableado del puerto de comunicación Modbus
Características generalesLas principales características físicas de un puerto Modbus son:
Interfaz física y conectoresEl controlador LTMR está equipado con dos tipos de conector en la cara frontal: 1. Un conector RJ45 hembra apantallado.2. Un bornero de tipo abierto separable.En la figura se muestra la cara frontal del LTMR con los conectores Modbus:
Ambos conectores son eléctricamente idénticos. Siguen los estándares de interoperabilidad de Modbus.NOTA: El producto se deberá conectar únicamente a través de un puerto. Se recomienda utilizar el conector RJ45.
Patillaje del conector RJ45La conexión del controlador LTMR a la red Modbus se realiza mediante un conector blindado RJ45 respetando las siguientes pautas de cableado:Vista frontal
El plano del cableado de RJ45 es:
Interfaz física RS 485 de 2 hilos multipunto: red eléctricaConector Bloque de terminales y RJ45Polarización A nivel del maestro
N.° pin Señal Descripción1 – No conectado2 – No conectado3 – No conectado4 D1 o D(B) Terminal de transmisor-receptor 15 D0 o D(A) Terminal de transmisor-receptor 06 – No conectado7 – No conectado8 0VL Común de señal y alimentación
DOCA0130ES-01 07/2018 13

Cableado de la red Modbus
Bloque de terminales de tipo abiertoEl controlador LTMR presenta los borneros enchufables y las siguientes asignaciones de pines correspon-dientes a la red Modbus:
Características del bloque de terminales de tipo abierto
Pin Señal Descripción1 D1 o D(B) Terminal de transmisor-receptor 12 D0 o D(A) Terminal de transmisor-receptor 03 S Pin blindado Modbus4 V- Común de señal y alimentación5 NC Pin VP Modbus (no conectado)
Conector Cinco pinesAltura 5,08 mm (0.2 in.)Par de apriete 0,5 a 0,6 N•m (5 lb-in)Destornillador plano 3 mm (0.10 in.)
14 DOCA0130ES-01 07/2018
Cableado de la red Modbus
Cableado de la red Modbus
Descripción generalLa manera recomendada de conectar un controlador LTMR a una red Modbus en el bus RS 485 es a través del conector hembra blindado RJ45.En esta sección se describen tres casos típicos de conexión de controladores LTMR al bus mediante su conector RJ45: Conexión de controladores LTMR instalados en una carcasa a través de cajas de conexiones T Conexión de controladores LTMR instalados en cajones extraíbles a través de cajas de conexiones T Conexión de controladores LTMR instalados en cajones extraíbles a través del cableado
Modbus Reglas de cableadoDeben respetarse las siguientes reglas de cableado a fin de reducir las interferencias debidas a la compatibilidad electromagnética (EMC en sus siglas en inglés) en el funcionamiento del controlador LTMR: Mantenga la mayor distancia posible entre el cable de comunicaciones y los cables de alimentación o
control (se recomiendan 30 cm o 11.8 in). En caso necesario, cruce el cable Modbus y los cables de alimentación en ángulos rectos. Instale los cables de comunicación lo más cerca posible de la placa conectada a tierra. No doble ni dañe los cables. El radio de curvatura mínimo es 10 veces el diámetro del cable. Evite ángulos agudos de los trayectos o pasajes del cable. Use únicamente los cables recomendados. Todos los conectores RJ45 deben ser metálicos. Todo cable Modbus deberá estar apantallado: El apantallamiento del cable debe conectarse a una tierra de protección. La conexión del apantallamiento del cable a la tierra de protección debe ser lo más corta posible. Conecte todos los apantallamientos entre sí si es necesario. Realice la conexión a tierra del apantallamiento con un collar.
Cuando el controlador LTMR se instala en un cajón extraíble: Conecte entre sí todos los contactos de apantallamiento de la parte del cajón extraíble del conector
auxiliar a la tierra del cajón extraíble a fin de crear una barrera electromagnética. Consulte la Okken Communications Cabling & Wiring Guide (Guía de cableado y conexión de comunicaciones de Okken), que está disponible bajo pedido.
No conecte el apantallamiento del cable a la parte fija del conector auxiliar. Coloque un terminador de línea a cada extremo del bus para evitar averías del bus de comunicaciones.
En términos generales, todo terminador de línea ya viene integrado en el maestro. Cablee directamente el bus entre los conectores, sin bloques de terminales intermedios. La polaridad común (0 V) deberá conectarse directamente a la tierra de protección, preferentemente a
un único punto para todo el bus. En general, este punto se elige en el dispositivo maestro o en el dispositivo de polarización.
Para obtener más información, consulte la Electrical Installation Guide (Guía de instalación eléctrica, disponible sólo en inglés), capítulo ElectroMagnetic Compatibility (EMC) (Compatibilidad electromagnética).
AVISOAVERÍA DE COMUNICACIÓNRespete todas las reglas de cableado y conexión a tierra a fin de evitar averías de comunicación debidas a las perturbaciones por EMC.El incumplimiento de estas instrucciones puede causar daño al equipo.
DOCA0130ES-01 07/2018 15

Cableado de la red Modbus
Controladores LTMR instalados en una carcasaEl diagrama de cableado correspondiente a la conexión de controladores LTMR instalados en carcasas al bus RS 485 a través del conector RJ45 se muestra a continuación:
1 Maestro (PLC, PC o módulo de comunicaciones) con terminador de línea2 Cable apantallado Modbus con dos conectores RJ45 VW3 A8 306 R••3 Conexión a tierra del blindaje del cable Modbus4 Cajas de conexiones T de Modbus VW3 A8 306 TF•• (con cable)5 Conexión a tierra de las cajas de conexiones T de Modbus6 Terminador de línea para el conector RJ45 VW3 A8 306 R (120 Ω)
Controladores LTMR instalados en un panel de control de motores Blokset u OkkenLa instalación de controladores LTMR en cajones extraíbles de un panel presenta restricciones específicas del tipo de panel: Para la instalación de controladores LTMR en un panel Okken, consulte la Okken Communications
Cabling & Wiring Guide (Guía de cableado y conexión de comunicaciones de Okken), disponible bajo pedido.
Para la instalación de controladores LTMR en un panel Blokset, consulte la Blokset Communications Cabling & Wiring Guide (Guía de cableado y conexión de comunicaciones de Blokset), disponible bajo pedido.
Para la instalación de controladores LTMR en otros tipos de paneles, siga las instrucciones de EMC específicas descritas en este manual y consulte las instrucciones relacionadas específicas del tipo de panel.
16 DOCA0130ES-01 07/2018
Cableado de la red Modbus
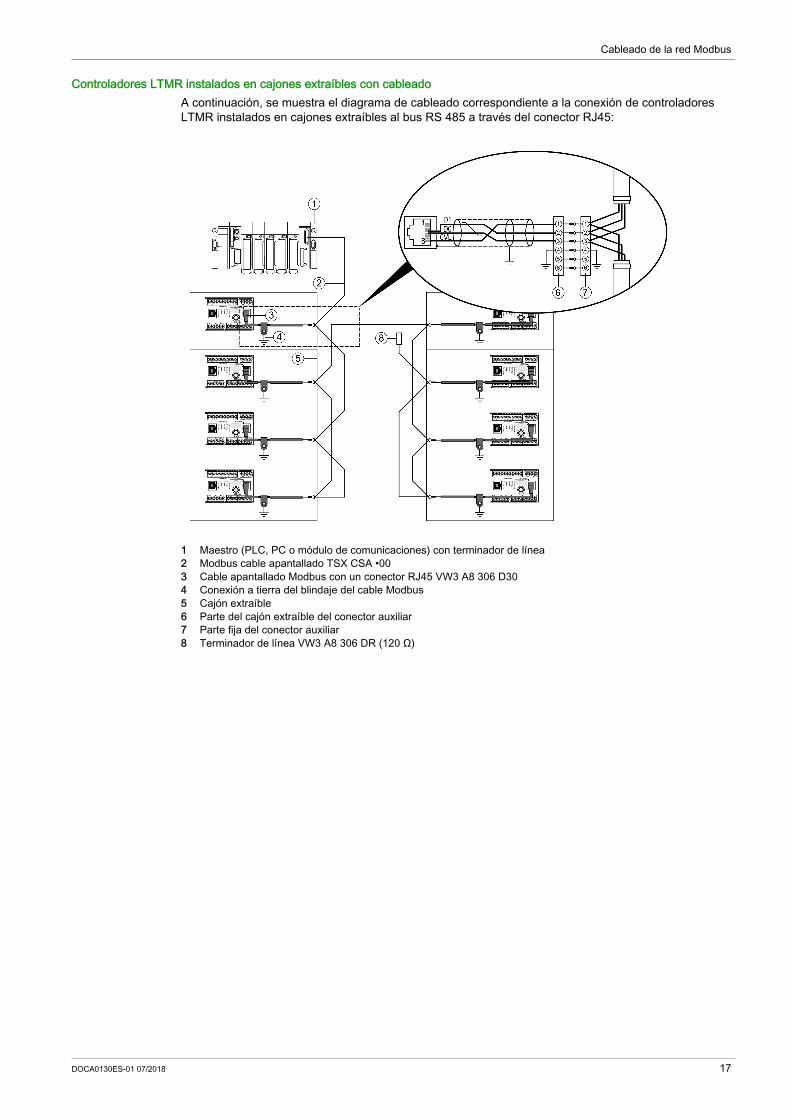
Controladores LTMR instalados en cajones extraíbles con cableadoA continuación, se muestra el diagrama de cableado correspondiente a la conexión de controladores LTMR instalados en cajones extraíbles al bus RS 485 a través del conector RJ45:
1 Maestro (PLC, PC o módulo de comunicaciones) con terminador de línea2 Modbus cable apantallado TSX CSA •003 Cable apantallado Modbus con un conector RJ45 VW3 A8 306 D304 Conexión a tierra del blindaje del cable Modbus5 Cajón extraíble6 Parte del cajón extraíble del conector auxiliar7 Parte fija del conector auxiliar8 Terminador de línea VW3 A8 306 DR (120 Ω)
DOCA0130ES-01 07/2018 17

Cableado de la red Modbus
Controladores LTMR instalados en cajones extraíbles con cajas de conexiones TEl diagrama de cableado correspondiente a la conexión de controladores LTMR instalados en cajones extraíbles al bus RS 485 a través del conector RJ45 y de cajas de conexiones T se muestra a continuación:
1 Maestro (PLC, PC o módulo de comunicaciones) con terminador de línea2 Cable apantallado Modbus con dos conectores RJ45 VW3 A8 306 R3 Cable apantallado Modbus con un conector RJ45 VW3 A8 306 D304 Conexión a tierra del blindaje del cable Modbus5 Cajón extraíble6 Parte del cajón extraíble del conector auxiliar7 Parte fija del conector auxiliar8 Cajas de conexiones T de Modbus VW3 A8 306 TF• (con cable)9 Conexión a tierra de las cajas de conexiones T de Modbus10 Terminador de línea VW3 A8 306 R (120 Ω)
Lista de accesorios de Modbus
Designación Descripción Número de referenciaCajas de conexiones T Caja con dos conectores RJ45 hembra
para el cable troncal y un cable integrado de 0,3 m (1 ft) con un conector macho RJ45 para derivación
VW3 A8 306 TF03
Caja con dos conectores RJ45 hembra para el cable troncal y un cable integrado de 1 m (3.2 ft) con un conector macho RJ45 para derivación
VW3 A8 306 TF10
Terminador de línea para el conector RJ45 R = 120 Ω VW3 A8 306 RTerminador de línea para conector de tipo abierto
R = 120 Ω VW3 A8 306 DR
18 DOCA0130ES-01 07/2018

Cableado de la red Modbus
Lista de cables Modbus
Designación Longitud Número de referenciaCable apantallado para el bus Modbus, con dos conectores RJ45
0,3 m (1 ft) VW3 A8 306 R031 m (3,2 ft) VW3 A8 306 R103 m (9,8 ft) VW3 A8 306 R30
Cable apantallado para el bus Modbus, con un conector RJ45 y un extremo pelado
3 m (9,8 ft) VW3 A8 306 D30
Cable apantallado para el bus Modbus, con dos extremos pelados
100 m (320 ft) TSX CSA 100200 m (640 ft) TSX CSA 200500 m (1600 ft) TSX CSA 500
Cable Belden – –
DOCA0130ES-01 07/2018 19

Cableado de la red Modbus
20 DOCA0130ES-01 07/2018

TeSys T LTMRUso de la red de comunicación ModbusDOCA0130ES 12/2017
Uso de la red de comunicación Modbus
Capítulo 3Uso de la red de comunicación Modbus
Descripción generalEn este capítulo se describe cómo utilizar el controlador LTMR a través del puerto de red mediante el protocolo Modbus.
(1) Para más información, consulte NEMA ICS 1.1 (última edición), "Safety Guidelines for the Application, Installation, and Maintenance of Solid State Control" (Directrices de seguridad para la aplicación, la instalación y el mantenimiento del control de estado estático).
Contenido de este capítuloEste capítulo contiene los siguientes apartados:
ADVERTENCIAPÉRDIDA DE CONTROL El diseñador del esquema de control debe tener en cuenta los modos de fallo de rutas de control
posibles y, para ciertas funciones críticas, proporcionar los medios para lograr un estado seguro durante y después de un fallo de ruta. Ejemplos de funciones críticas de control son la parada de emergencia y la parada de sobrerrecorrido.
Para las funciones críticas de control deben proporcionarse rutas de control separadas o redundantes.
Las rutas de control del sistema pueden incluir enlaces de comunicación. Deben tenerse en cuenta las implicaciones de retardos o fallos de transmisión no anticipados del enlace (1).
Cada implementación de un controlador LTMR debe probarse de forma individual y exhaustiva para comprobar su funcionamiento correcto antes de ponerse en servicio.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
ADVERTENCIAREARRANQUE INESPERADO DEL MOTORCompruebe que el software de aplicación de PLC: Tenga en cuenta los cambios de control local a control a distancia. Gestione de forma adecuada los comandos de control del motor al efectuar estos cambios.Al seleccionar los canales de control de red, y en función de la configuración del protocolo de comunicación, el controlador LTMR puede tener en cuenta el último estado conocido de los comandos de control del motor procedentes del PLC y provocar el rearranque automático del motor.El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
Apartado PáginaPrincipio del protocolo Modbus 23Configuración del puerto de red LTMRModbus del 24Comprobación de la comunicación Modbus 25Control y supervisión simplificadas 27Solicitudes Modbus y ejemplos de programación 28Gestión de excepciones Modbus 29Variables de mapa de usuario (Registros indirectos definidos por el usuario) 30Mapa de registros (Organización de variables de comunicación) 31Formatos de los datos 32Tipos de datos 33Variables de identificación 39Variables históricas 40
DOCA0130ES-01 07/2018 21

Uso de la red de comunicación Modbus
Variables de supervisión 46Variables de configuración 52Variables de comandos 59Variables de mapa de usuario 60Variables de lógica personalizada 61
Apartado Página
22 DOCA0130ES-01 07/2018
Uso de la red de comunicación Modbus
Principio del protocolo Modbus
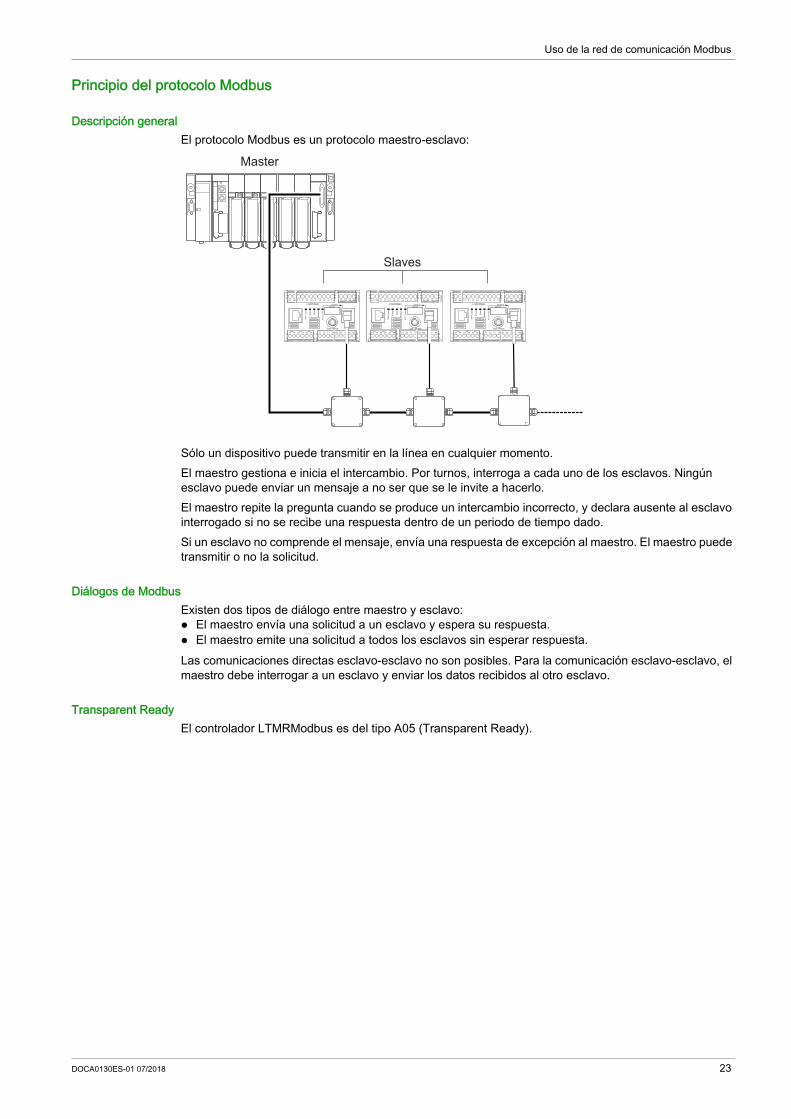
Descripción generalEl protocolo Modbus es un protocolo maestro-esclavo:
Sólo un dispositivo puede transmitir en la línea en cualquier momento. El maestro gestiona e inicia el intercambio. Por turnos, interroga a cada uno de los esclavos. Ningún esclavo puede enviar un mensaje a no ser que se le invite a hacerlo.El maestro repite la pregunta cuando se produce un intercambio incorrecto, y declara ausente al esclavo interrogado si no se recibe una respuesta dentro de un periodo de tiempo dado.Si un esclavo no comprende el mensaje, envía una respuesta de excepción al maestro. El maestro puede transmitir o no la solicitud.
Diálogos de ModbusExisten dos tipos de diálogo entre maestro y esclavo: El maestro envía una solicitud a un esclavo y espera su respuesta. El maestro emite una solicitud a todos los esclavos sin esperar respuesta.Las comunicaciones directas esclavo-esclavo no son posibles. Para la comunicación esclavo-esclavo, el maestro debe interrogar a un esclavo y enviar los datos recibidos al otro esclavo.
Transparent ReadyEl controlador LTMRModbus es del tipo A05 (Transparent Ready).
I.1 I.2 I.3 I.4 I.5 I.6 I.1 I.2 I.3 I.4 I.5 I.6 I.1 I.2 I.3 I.4 I.5 I.6
MODBUS MODBUSMODBUS
Master
Slaves
DOCA0130ES-01 07/2018 23

Uso de la red de comunicación Modbus
Configuración del puerto de red LTMRModbus del
Parámetros de comunicaciónPara poder iniciar una comunicación, primero hay que configurar los parámetros de comunicación del puerto TeSys T DTM mediante el software Modbus o el HMI: Puerto de red-ajuste de dirección Velocidad de transmisión en baudios del puerto de red Ajuste de paridad del puerto de red Tiempo sobrepasado de pérdida de comunicaciones del puerto de red endianPuerto de red-ajuste endian
Puerto de red-ajuste de direcciónLa dirección del dispositivo se puede establecer entre 1 y 247.El ajuste de fábrica es 1, que corresponde a un valor indefinido.
Puerto de red-ajuste de velocidad de transmisión en baudiosLas velocidades de transmisión posibles son: 1200 baudios 2400 baudios 4800 baudios 9600 baudios 19.200 baudios Detección automáticaEl ajuste de fábrica es Detección automática. En Detección automática, el controlador es capaz de adaptar su velocidad en baudios a la del maestro. 19.200 baudios es la primera velocidad de transmisión en baudios que se prueba.
Puerto de red-ajuste de paridadSe puede seleccionar la paridad entre: Par Impar NingunoCuando el parámetro Puerto de red-velocidad de transmisión en baudios está establecido en Detección automática, el controlador es capaz de adaptar su paridad y bit de parada a los del maestro. La paridad par es la primera paridad que se comprueba.En Detección automática, la paridad se establece en automática y se ignora la configuración anterior. El comportamiento de la paridad y el bit de parada está vinculado:
Puerto de red-tiempo sobrepasado de pérdida de comunicacionesEl parámetro Puerto de red-tiempo sobrepasado de pérdida de comunicaciones se utiliza para determinar el valor de tiempo sobrepasado después de una pérdida de comunicación con el PLC. Rango: De 1 a 9.999
Ajuste de recuperación del puerto de redEl parámetro Puerto de red-ajuste de recuperación se utiliza para ajustar el modo de recuperación en caso de pérdida de comunicación con el PLC.
Puerto de red-ajuste endianPuerto de red-ajuste endian permite alternar las dos palabras de una palabra doble. 0 = la palabra menos significativa primero (little endian) 1 = la palabra más significativa primero (big endian, ajuste de fábrica)
Si la paridad es... El número de bits de parada es...par o impar 1ninguno 2
24 DOCA0130ES-01 07/2018

Uso de la red de comunicación Modbus
Comprobación de la comunicación Modbus
IntroducciónConfigure en último lugar la función de red. Aunque los conectores estén conectados, la comunicación entre los controladores y el PLC no puede comenzar hasta que se hayan introducido los parámetros de comunicación (véase página 24) correctos a través del software SoMove con el TeSys T DTM o la HMI.Luego, puede comprobar si el sistema se comunica correctamente.La secuencia de comprobación de la comunicación Modbus es la siguiente:
Paso 1En la cara frontal del controlador LTMR, compruebe los dos LED siguientes:1. Fallback2. PLC CommEn la figura se muestra la cara frontal del LTMR con los dos LED de comunicación Modbus:
La recuperación, Fallback, de la comunicación se indica con un LED rojo (1).
Si el LED de recuperación rojo está... Entonces...APAGADO El LTMR no está en modo de recuperación de la comunicación.ENCENDIDO El LTMR está en modo de recuperación de la comunicación.
DOCA0130ES-01 07/2018 25
Uso de la red de comunicación Modbus
El estado de la comunicación Modbus, marcado como PLC Comm, se indica con un LED amarillo (2).
Paso 2Si el producto está estableciendo comunicación pero los LED no se encienden, compruebe los cables y conectores y corrija los posibles problemas de conexión.
Paso 3Si el producto sigue sin establecer comunicación, compruebe la configuración mediante: SoMove con el TeSys T DTM; o la HMI.El error de comunicación puede ser debido a que la dirección, velocidad o paridad no son correctos, o a que el PLC no se ha configurado correctamente, etc.
Si el LED de PLC Comm amarillo está... Entonces...APAGADO el LTMR no se está comunicandoParpadeando el LTMR está intercambiando tramas (recibiendo o enviando)
26 DOCA0130ES-01 07/2018

Uso de la red de comunicación Modbus
Control y supervisión simplificadas
Descripción generalA continuación se muestra un ejemplo de los registros principales que controlan y supervisan un Controlador de gestión de motores.
Modbus Registros para simplificar el funcionamientoEn la ilustración siguiente se proporciona información de configuración básica, mediante los siguientes registros: configuración, control y supervisión (estado del sistema, mediciones, fallos y advertencias, acuse de recibo).
DOCA0130ES-01 07/2018 27
Uso de la red de comunicación Modbus
Solicitudes Modbus y ejemplos de programación
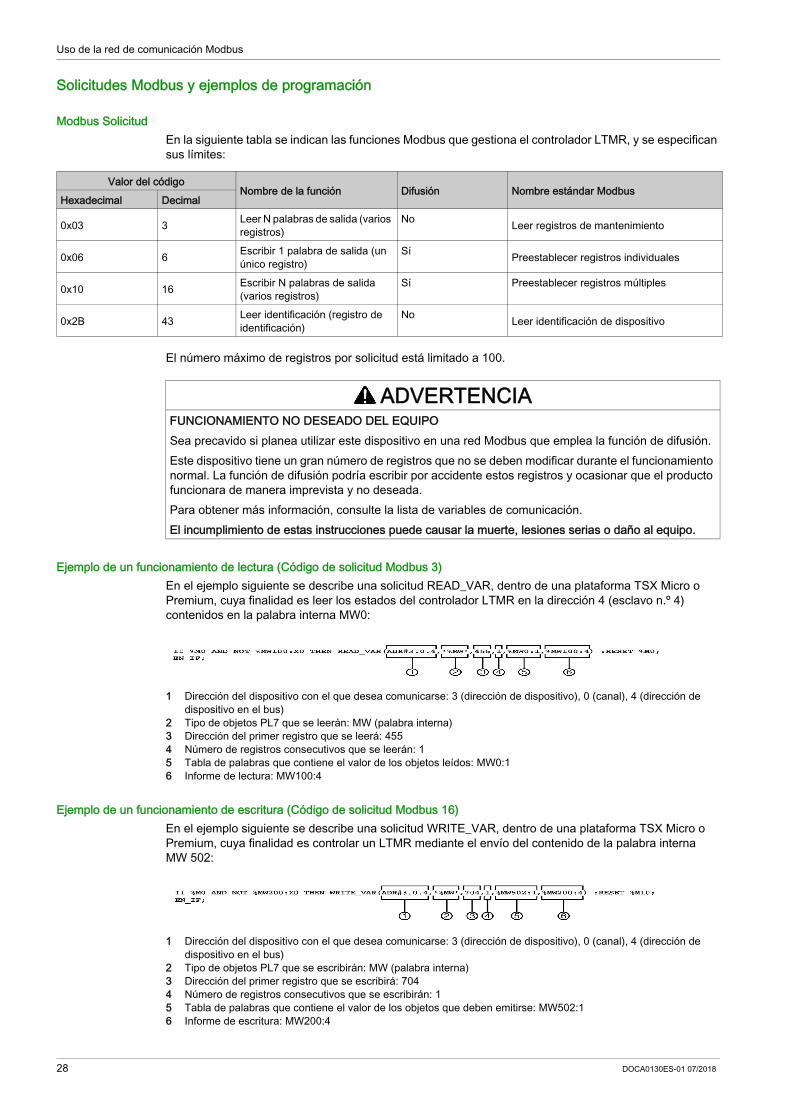
Modbus SolicitudEn la siguiente tabla se indican las funciones Modbus que gestiona el controlador LTMR, y se especifican sus límites:
El número máximo de registros por solicitud está limitado a 100.
Ejemplo de un funcionamiento de lectura (Código de solicitud Modbus 3)En el ejemplo siguiente se describe una solicitud READ_VAR, dentro de una plataforma TSX Micro o Premium, cuya finalidad es leer los estados del controlador LTMR en la dirección 4 (esclavo n.º 4) contenidos en la palabra interna MW0:
1 Dirección del dispositivo con el que desea comunicarse: 3 (dirección de dispositivo), 0 (canal), 4 (dirección de dispositivo en el bus)
2 Tipo de objetos PL7 que se leerán: MW (palabra interna) 3 Dirección del primer registro que se leerá: 455 4 Número de registros consecutivos que se leerán: 15 Tabla de palabras que contiene el valor de los objetos leídos: MW0:16 Informe de lectura: MW100:4
Ejemplo de un funcionamiento de escritura (Código de solicitud Modbus 16)En el ejemplo siguiente se describe una solicitud WRITE_VAR, dentro de una plataforma TSX Micro o Premium, cuya finalidad es controlar un LTMR mediante el envío del contenido de la palabra interna MW 502:
1 Dirección del dispositivo con el que desea comunicarse: 3 (dirección de dispositivo), 0 (canal), 4 (dirección de dispositivo en el bus)
2 Tipo de objetos PL7 que se escribirán: MW (palabra interna)3 Dirección del primer registro que se escribirá: 7044 Número de registros consecutivos que se escribirán: 15 Tabla de palabras que contiene el valor de los objetos que deben emitirse: MW502:16 Informe de escritura: MW200:4
Valor del códigoNombre de la función Difusión Nombre estándar Modbus
Hexadecimal Decimal
0x03 3 Leer N palabras de salida (varios registros)
No Leer registros de mantenimiento
0x06 6 Escribir 1 palabra de salida (un único registro)
Sí Preestablecer registros individuales
0x10 16 Escribir N palabras de salida (varios registros)
Sí Preestablecer registros múltiples
0x2B 43 Leer identificación (registro de identificación)
No Leer identificación de dispositivo
ADVERTENCIAFUNCIONAMIENTO NO DESEADO DEL EQUIPO Sea precavido si planea utilizar este dispositivo en una red Modbus que emplea la función de difusión. Este dispositivo tiene un gran número de registros que no se deben modificar durante el funcionamiento normal. La función de difusión podría escribir por accidente estos registros y ocasionar que el producto funcionara de manera imprevista y no deseada.Para obtener más información, consulte la lista de variables de comunicación.El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al equipo.
28 DOCA0130ES-01 07/2018
Uso de la red de comunicación Modbus
Gestión de excepciones Modbus
Descripción generalEl controlador LTMR normalmente sigue los criterios Modbus para la Gestión de excepciones.Se aplican tres casos especiales al controlador LTMR: Registros de campo de bits Código de excepción 02 – Illegal data address (Dirección de datos no válida) Código de excepción 03 – Illegal data value (Valor de datos no válido)
Registros de campo de bitsAlgunos registros del Mapa de registros son campos de bits. En función del estado del controlador LTMR, algunos bits de los mencionados registros no serán de escritura. En ese caso, el controlador LTMR no permitirá escribir en esos bits por lo que no se devolverá ningún código de excepción. Por ejemplo, si el controlador LTMR se encuentra fuera del estado Config Sis, los bits que sólo se puedan escribir en modo de configuración se ignorarán. Sin embargo, se dará el estado de escritura en los bits no limitados por el controlador LTMR.
Código de excepción 02 – Illegal data address (Dirección de datos no válida)Por lo general, el controlador LTMR devolverá un código de excepción de dirección de datos no válida si la dirección se encuentra fuera del rango o es inaccesible. En concreto, el controlador LTMR devolverá una dirección de datos no válida si: Se envía una solicitud de escritura a un registro de sólo lectura. El permiso para escribir un registro no se concede debido al estado del controlador LTMR: se da este
caso, por ejemplo, cuando un registro que sólo se puede escribir en modo de configuración se escribe mientras el controlador LTMR se encuentra fuera del estado Config Sis.
Código de excepción 03 – Illegal data value (Valor de datos no válido)En general, el controlador LTMR devolverá un código de excepción de valor de datos no válido si hay un problema con la estructura del mensaje, como una longitud no válida. El controlador LTMR utilizará también este código de excepción si: Los datos que se tienen que escribir se encuentran fuera del rango (para registros de campos de bits
y registros estándar): se da este caso si se envía una solicitud de escritura de 100 a un registro de L/E con un rango de 0 a 50.
Un bit o registro reservado se escribe en un valor distinto a 0. El parámetro Motor-comando de baja velocidad (bit 704.6) se activa si el modo del controlador del
motor seleccionado no es un modo de funcionamiento de dos velocidades.
DOCA0130ES-01 07/2018 29

Uso de la red de comunicación Modbus
Variables de mapa de usuario (Registros indirectos definidos por el usuario)
Descripción general Las variables de mapa de usuario han sido diseñadas para optimizar el acceso a varios registros no contiguos en una única solicitud.Puede definir varias áreas de lectura y escritura.El mapa de usuario puede definirse mediante: Un PC con SoMove con el software TeSys T DTM Un PLC a través de un puerto de red
Variables de mapa de usuarioLas variables de mapa de usuario se dividen en dos grupos:
El grupo Dirección del mapa de usuario se utiliza para seleccionar una lista de direcciones de lectura o escritura. Puede considerarse como una zona de configuración.El grupo Valor del mapa de usuario se utiliza para leer o escribir valores asociados a direcciones configuradas en la zona Dirección del mapa de usuario: La lectura o escritura del registro 900 permite leer o escribir la dirección de registro definida en el
registro 800 La lectura o escritura del registro 901 permite leer o escribir la dirección de registro definida en el
registro 801,...
Ejemplo prácticoEn la tabla siguiente se ofrece un ejemplo de la configuración de dirección del mapa de usuario que permite el acceso a registros no contiguos:
Con esta configuración, la información de supervisión es accesible con una sola solicitud de lectura a través de las direcciones de registro de 900 a 906.La configuración y los comandos pueden escribirse con un solo proceso de escritura utilizando los registros 950 a 952.
Direcciones de mapa de usuario 800 a 898Valores de mapa de usuario 900 a 998
Registro de dirección de mapa de usuario Valor configurado Registro800 452 Registro de fallos 1801 453 Registro de fallos 2802 461 Registro de advertencias 1803 462 Registro de advertencias 2804 450 Mínimo-tiempo de espera805 500 MSW de corriente media (0,01 A)806 501 LSW de corriente media (0,01 A)
850 651 Registro 1 de elementos de visualización en HMI851 654 Registro 2 de elementos de visualización en HMI852 705 Registro de control 2
30 DOCA0130ES-01 07/2018

Uso de la red de comunicación Modbus
Mapa de registros (Organización de variables de comunicación)
IntroducciónLas variables de comunicación se muestran en tablas, en función del grupo (identificación, históricos o supervisión) al que pertenecen. Están asociadas con un controlador LTMR, que puede tener o no tener conectado un módulo de expansión LTME.
Grupos de variables de comunicaciónLas variables de comunicación están agrupadas según los criterios siguientes:
Estructura de la tablaLas variables de comunicación se presentan en tablas de 4 columnas:
NotaLa columna Nota proporciona un código para información adicional. Existen variables sin código para todas las configuraciones de hardware, y sin restricciones funcionales.El código puede ser: Numérico (1 a 9), para combinaciones específicas de hardware. Alfabético (A a Z), para comportamientos específicos del sistema.
Direcciones sin utilizarLas direcciones sin utilizar se pueden clasificar en tres categorías: Sin significado, en las tablas de sólo lectura, significa que debe ignorar el valor leído, tanto si es igual
a 0 como si no. Reservado, en las tablas de lectura/escritura, significa que debe escribir 0 en estas variables. Olvidado, significa que las peticiones de lectura o escritura se han rechazado, que esas direcciones no
son accesibles en absoluto.
Grupos de variables RegistrosVariables de identificación 00 a 99Variables históricas 100 a 449Variables de supervisión 450 a 539Variables de configuración 540 a 699Variables de comandos 700 a 799Variables de mapa de usuario 800 a 999Variables de lógica personalizada 1200 a 1399
Columna 1 Registro (en formato decimal)
Columna 2Tipo de variable
Columna 3Nombre de la variable y acceso a través de solicitudes Modbus de sólo lectura o de lectura/escritura
Columna 4Nota: Código para información adicional
Si la nota es... Entonces la variable…1 Está disponible para la combinación LTMR + LTMEV40.2 Siempre está disponible pero con un valor equivalente a 0 si no se ha conectado un LTMEV40.3 - 9 No utilizado
Si la nota es... Entonces... A La variable sólo se puede escribir cuando el motor está parado(1)
B La variable sólo se puede escribir en modo de configuración (por ejemplo, características estáticas)(1).C La variable sólo se puede escribir cuando no hay fallos(1)
D - Z No utilizado(1) Las restricciones A, B y C sólo se aplican a los bits, no a los registros enteros. Si intenta escribir un valor cuando se aplica una restricción, el bit no se cambiará y no se devolverá ningún código de excepción. Los códigos de excepción se devuelven a nivel de registro, no a nivel de bit.
DOCA0130ES-01 07/2018 31

Uso de la red de comunicación Modbus
Formatos de los datos
Descripción generalEl formato de los datos de una variable de comunicación puede ser entero, Palabra o Palabra[n], como se describe a continuación. Para obtener más información acerca del tamaño y formato de una variable, consulte Tipos de datos (véase página 33).
Entero (Int, UInt, DInt, IDInt)Los enteros se clasifican en las siguientes categorías: Int: Entero con signo, ocupa un registro (16 bits) UInt: Entero sin signo, ocupa un registro (16 bits) DInt: Entero con signo doble, ocupa 2 registros (32 bits) UDInt: Entero sin signo doble, ocupa 2 registros (32 bits)En todas las variables de tipo entero, el nombre de la variable se completa con su unidad o formato, si es necesario.Ejemplo:Dirección 474, UInt, Frecuencia (x 0,01 Hz).
PalabraPalabra: Conjunto de 16 bits, en el que cada bit o grupo de bits representa datos de comandos, supervisión o configuración.Ejemplo:Dirección 455, Palabra, Registro 1 de estado del sistema.
Palabra[n] Palabra[n]: Datos codificados en registros contiguos.Ejemplos:Direcciones 64 a 69, Palabra[6], Controlador-referencia comercial (DT_CommercialReference (véase página 33)).Direcciones 655 a 658, Palabra[4], (DT_DateTime (véase página 34)).
bit 0 Sistema-listobit 1 Sistema-activadobit 2 Sistema-fallobit 3 Sistema-advertenciabit 4 Sistema-disparadobit 5 Fallo-reinicio autorizadobit 6 (Sin significado)bit 7 Motor-en marchaBits 8-13 Motor-relación de corriente mediabit 14 En remotobit 15 Motor-en arranque (en curso)
32 DOCA0130ES-01 07/2018
Uso de la red de comunicación Modbus
Tipos de datos
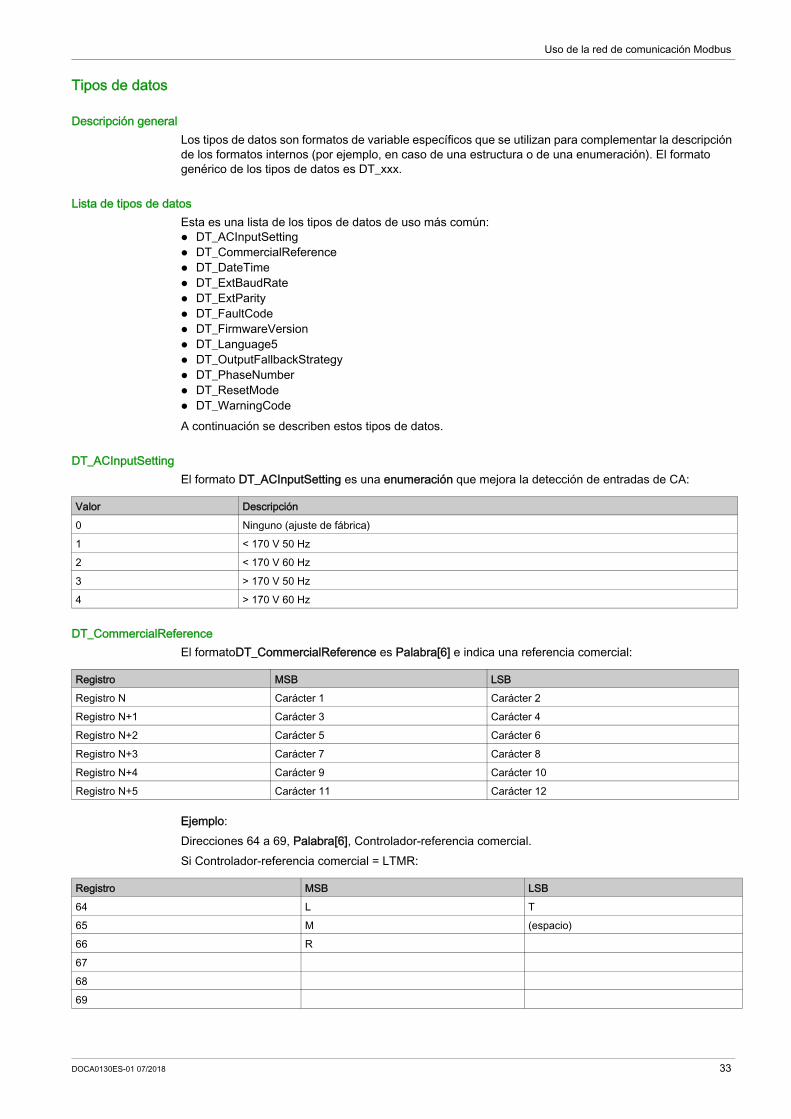
Descripción generalLos tipos de datos son formatos de variable específicos que se utilizan para complementar la descripción de los formatos internos (por ejemplo, en caso de una estructura o de una enumeración). El formato genérico de los tipos de datos es DT_xxx.
Lista de tipos de datosEsta es una lista de los tipos de datos de uso más común: DT_ACInputSetting DT_CommercialReference DT_DateTime DT_ExtBaudRate DT_ExtParity DT_FaultCode DT_FirmwareVersion DT_Language5 DT_OutputFallbackStrategy DT_PhaseNumber DT_ResetMode DT_WarningCodeA continuación se describen estos tipos de datos.
DT_ACInputSettingEl formato DT_ACInputSetting es una enumeración que mejora la detección de entradas de CA:
DT_CommercialReferenceEl formatoDT_CommercialReference es Palabra[6] e indica una referencia comercial:
Ejemplo:Direcciones 64 a 69, Palabra[6], Controlador-referencia comercial.Si Controlador-referencia comercial = LTMR:
Valor Descripción0 Ninguno (ajuste de fábrica)1 < 170 V 50 Hz2 < 170 V 60 Hz3 > 170 V 50 Hz4 > 170 V 60 Hz
Registro MSB LSBRegistro N Carácter 1 Carácter 2Registro N+1 Carácter 3 Carácter 4Registro N+2 Carácter 5 Carácter 6Registro N+3 Carácter 7 Carácter 8Registro N+4 Carácter 9 Carácter 10Registro N+5 Carácter 11 Carácter 12
Registro MSB LSB64 L T65 M (espacio)66 R 67 68 69
DOCA0130ES-01 07/2018 33

Uso de la red de comunicación Modbus
DT_DateTimeEl formatoDT_DateTime es Palabra[4] e indica la fecha y la hora:
Donde: S = segundo
El formato es 2 dígitos BCD.El intervalo de valores es [00-59] en BCD.
0 = sin utilizar H = hora
El formato es 2 dígitos BCD.El intervalo de valores es [00-23] en BCD.
m = minutoEl formato es 2 dígitos BCD.El intervalo de valores es [00-59] en BCD.
M = mesEl formato es 2 dígitos BCD.El intervalo de valores es [01-12] en BCD.
D = díaEl formato es 2 dígitos BCD.El intervalo de valores es (en BCD): [01-31] para los meses 01, 03, 05, 07, 08, 10, 12 [01-30] para los meses 04, 06, 09, 11 [01-29] para el mes 02 en un año bisiesto [01-28] para el mes 02 en un año no bisiesto
A = añoEl formato es 4 dígitos decimales de codificación en binario (BCD).El intervalo de valores es [2006-2099] en BCD.
El formato de entrada de datos y el intervalo de valores son:
Ejemplo:Direcciones 655 a 658, Palabra[4], Fecha y hora-ajuste.Si la fecha es 4 de septiembre de 2008 a las 7 a.m., 50 minutos y 32 segundos:
Con formato de entrada de datos: DT#2008-09-04-07:50:32.
Registro Bits 12-15 Bits 8-11 Bits 4-7 Bits 0-3Registro N S S 0 0Registro N+1 H H m mRegistro N+2 M M D DRegistro N+3 A A A A
Formato de entrada de datos DT#AAAA-MM-DD-HH:mm:ssValor mínimo DT#2006-01-01:00:00:00 1 de enero de 2006Valor máximo DT#2099-12-31-23:59:59 31 de diciembre de 2099Nota: Si proporciona valores fuera de los límites, el sistema devolverá un error.
Registro 15 12 11 8 7 4 3 0655 3 2 0 0656 0 7 5 0657 0 9 0 4658 2 0 0 8
34 DOCA0130ES-01 07/2018

Uso de la red de comunicación Modbus
DT_ExtBaudRateDT_ExtbaudRate depende del bus utilizado:El formato DT_ModbusExtBaudRate es una enumeración de las velocidades de transmisión en baudios posibles con la red Modbus:
El formato DT_ProfibusExtBaudRate es una enumeración de las velocidades de transmisión en baudios posibles con la red PROFIBUS DP:
El formato DT_DeviceNetExtBaudRate es una enumeración de las velocidades de transmisión en baudios posibles con la red DeviceNet:
El formato DT_CANopenExtBaudRate es una enumeración de las velocidades de transmisión en baudios posibles con la red CANopen:
DT_ExtParityDT_ExtParity depende del bus utilizado:El formato DT_ModbusExtParity es una enumeración de las paridades posibles con la red Modbus:
Valor Descripción1200 1200 baudios2400 2400 baudios4800 4800 baudios9600 9600 baudios19200 19.200 baudios65535 Autodetección (ajuste de fábrica)
Valor Descripción65535 Autobaudios (ajuste de fábrica)
Valor Descripción0 125 kbaudios1 250 kbaudios2 500 kbaudios3 Autobaudios (ajuste de fábrica)
Valor Descripción0 10 kbaudios1 20 kbaudios2 50 kbaudios3 125 kbaudios4 250 kbaudios (ajuste de fábrica)5 500 kbaudios6 800 kbaudios7 1000 kbaudios8 Transmisión en baudios automática9 Ajuste de fábrica
Valor Descripción0 Ninguno1 Par2 Impar
DOCA0130ES-01 07/2018 35

Uso de la red de comunicación Modbus
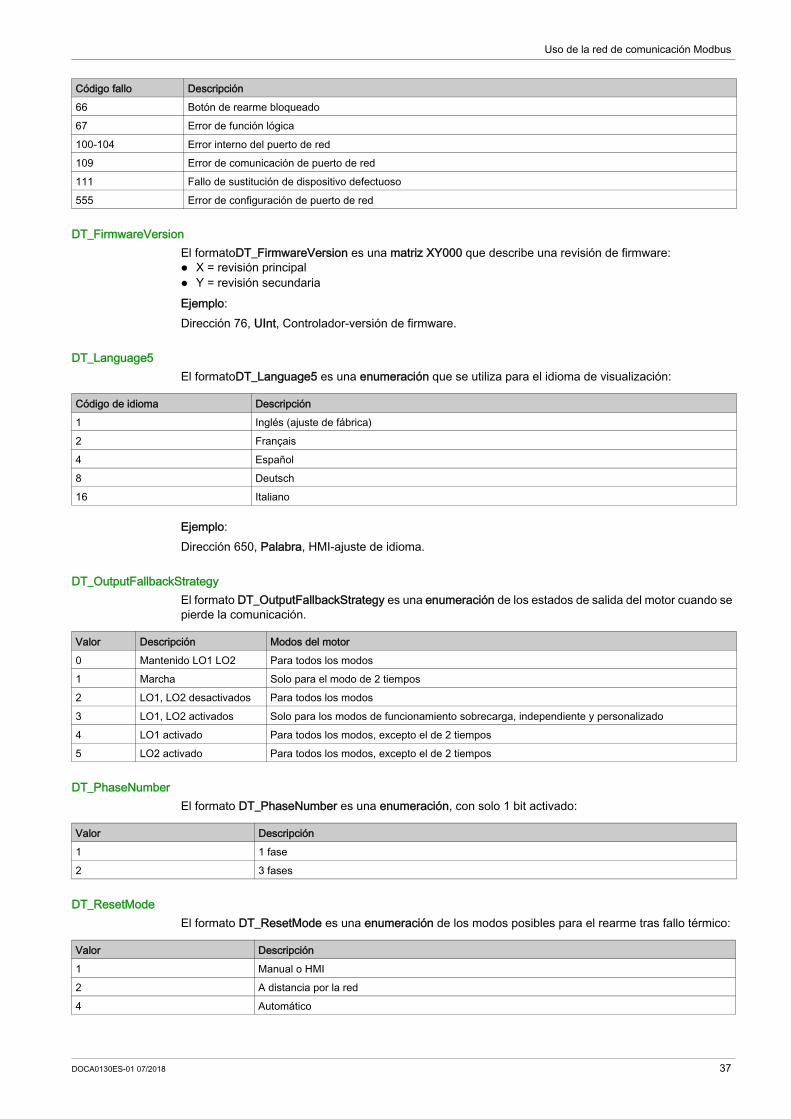
DT_FaultCodeEl formatoDT_FaultCode es una enumeración de códigos de fallo:
Código fallo Descripción0 Sin errores3 Corriente de tierra4 Sobrecarga térmica5 Arranque prolongado6 Bloqueo7 Current phase imbalance8 Infracorriente10 Prueba11 Error de puerto HMI12 Pérdida de comunicación del puerto HMI13 Error interno del puerto de red16 Fallo externo18 Diagnóstico encendido/apagado19 Diagnóstico de cableado20 Sobrecorriente21 Pérdida de corriente de fase22 Inversión de corrientes de fase23 Motor-sensor de temperatura24 Desequilibrio de tensiones de fase25 Pérdida de tensión de fase26 Inversión de tensión de fase27 Infratensión28 Sobretensión29 Potencia insuficiente30 Potencia excesiva31 Factor de potencia insuficiente32 Factor de potencia excesivo33 Configuración de LTME34 Cortocircuito en el sensor de temperatura35 Circuito abierto en el sensor de temperatura36 Inversión de CT37 Fuera del límite de relación de CT46 Comprobación de inicio47 Ejecutar recomprobación48 Parar comprobación49 Parar recomprobación51 Error de temperatura interna del controlador55 Error interno del controlador (desbordamiento de pila)56 Error interno del controlador (error de RAM)57 Error interno del controlador (error de suma de comprobación de RAM)58 Error interno del controlador (fallo de vigilancia de hardware)60 Detectada corriente L2 en modo monofásico64 Error de memoria no volátil65 Error de comunicación del módulo de expansión
36 DOCA0130ES-01 07/2018
Uso de la red de comunicación Modbus
DT_FirmwareVersionEl formatoDT_FirmwareVersion es una matriz XY000 que describe una revisión de firmware: X = revisión principal Y = revisión secundariaEjemplo:Dirección 76, UInt, Controlador-versión de firmware.
DT_Language5El formatoDT_Language5 es una enumeración que se utiliza para el idioma de visualización:
Ejemplo:Dirección 650, Palabra, HMI-ajuste de idioma.
DT_OutputFallbackStrategyEl formato DT_OutputFallbackStrategy es una enumeración de los estados de salida del motor cuando se pierde la comunicación.
DT_PhaseNumberEl formato DT_PhaseNumber es una enumeración, con solo 1 bit activado:
DT_ResetModeEl formato DT_ResetMode es una enumeración de los modos posibles para el rearme tras fallo térmico:
66 Botón de rearme bloqueado67 Error de función lógica100-104 Error interno del puerto de red109 Error de comunicación de puerto de red111 Fallo de sustitución de dispositivo defectuoso555 Error de configuración de puerto de red
Código fallo Descripción
Código de idioma Descripción1 Inglés (ajuste de fábrica)2 Français4 Español8 Deutsch16 Italiano
Valor Descripción Modos del motor0 Mantenido LO1 LO2 Para todos los modos1 Marcha Solo para el modo de 2 tiempos2 LO1, LO2 desactivados Para todos los modos3 LO1, LO2 activados Solo para los modos de funcionamiento sobrecarga, independiente y personalizado4 LO1 activado Para todos los modos, excepto el de 2 tiempos5 LO2 activado Para todos los modos, excepto el de 2 tiempos
Valor Descripción1 1 fase2 3 fases
Valor Descripción1 Manual o HMI2 A distancia por la red4 Automático
DOCA0130ES-01 07/2018 37
Uso de la red de comunicación Modbus
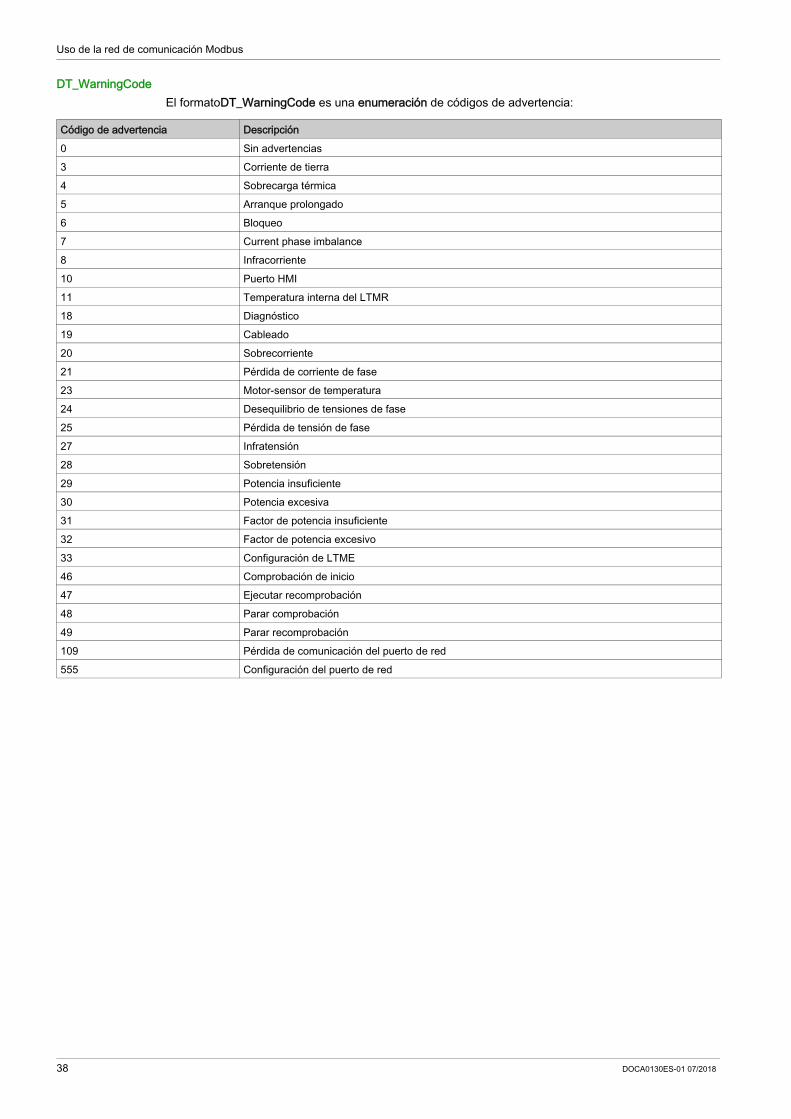
DT_WarningCodeEl formatoDT_WarningCode es una enumeración de códigos de advertencia:
Código de advertencia Descripción0 Sin advertencias3 Corriente de tierra 4 Sobrecarga térmica 5 Arranque prolongado 6 Bloqueo 7 Current phase imbalance 8 Infracorriente 10 Puerto HMI11 Temperatura interna del LTMR18 Diagnóstico19 Cableado20 Sobrecorriente21 Pérdida de corriente de fase23 Motor-sensor de temperatura24 Desequilibrio de tensiones de fase25 Pérdida de tensión de fase27 Infratensión28 Sobretensión29 Potencia insuficiente30 Potencia excesiva31 Factor de potencia insuficiente32 Factor de potencia excesivo33 Configuración de LTME46 Comprobación de inicio47 Ejecutar recomprobación48 Parar comprobación49 Parar recomprobación109 Pérdida de comunicación del puerto de red555 Configuración del puerto de red
38 DOCA0130ES-01 07/2018

Uso de la red de comunicación Modbus
Variables de identificación
Variables de identificaciónLas variables de identificación se describen en la siguiente tabla:
Registro Tipo de variable Variables de sólo lectura Nota (véase página 3
1)0-34 (Sin significado)35-40 Palabra[6] Expansión-referencia comercial
(Consulte DT_CommercialReference (véase página 33))1
41-45 Palabra[5] Expansión-número de serie 146 UInt Expansión-código de identificación 47 UInt Expansión-versión de firmware
(Consulte DT_FirmwareVersion (véase página 37))1
48 UInt Expansión-código de compatibilidad 149-60 (Sin significado)61 Ulnt Puerto de red-código de identificación62 Ulnt Puerto de red-versión de firmware
(Consulte DT_FirmwareVersion (véase página 37))63 Ulnt Puerto de red-código de compatibilidad64-69 Palabra[6] Controlador-referencia comercial
(Consulte DT_CommercialReference (véase página 33))70-74 Palabra[5] Controlador-número de serie75 Ulnt Controlador-código de identificación76 Ulnt Controlador-versión del firmware
(Consulte DT_FirmwareVersion (véase página 37))77 Ulnt Controlador-código de compatibilidad78 Ulnt Corriente-relación de escala (0,1%)79 Ulnt Corriente-máx. del sensor80 (Sin significado) 81 Ulnt Corriente-rango máx. (x 0,1 A)82-94 (Sin significado)95 Ulnt CT de carga-relación (x 0,1 A)96 Ulnt Corriente a plena carga máx. (intervalo FLC máximo, FLC = Corriente a
plena carga) (x 0,1 A)97-99 (Prohibido)
DOCA0130ES-01 07/2018 39

Uso de la red de comunicación Modbus
Variables históricas
Descripción general de los históricosLas variables históricas están agrupadas según los criterios siguientes: Los históricos de disparo se incluyen en una tabla principal y una tabla de extensión.
Históricos globales Los históricos globales se describen en la siguiente tabla:
Históricos de supervisión de LTMLos históricos de supervisión de LTM se describen en la siguiente tabla:
Grupos de variables históricas RegistrosHistóricos globales 100 a 121Históricos de supervisión de LTM 122 a 149Históricos de últimos disparosy extensión
150 a 179300 a 309
Históricos de disparo n-1y extensión
180 a 209330 a 339
Históricos de disparo n-2y extensión
210 a 239360 a 369
Históricos de disparo n-3y extensión
240 a 269390 a 399
Históricos de disparo n-4y extensión
270 a 299420 a 429
Registro Tipo de variable Variables de sólo lectura Nota (véase página 31)
100-101 (Sin significado)102 Ulnt Corriente de tierra-número de fallos103 Ulnt Sobrecarga térmica-número de fallos104 Ulnt Arranque prolongado-número de fallos105 Ulnt Agarrotamiento-número de fallos106 Ulnt Corriente-número de fallos de desequilibrio de fases107 Ulnt Infracorriente-número de fallos109 Ulnt HMI-número de fallos de puerto110 Ulnt Controlador-número de fallos internos111 Ulnt Puerto interno-número de fallos112 Ulnt (Sin significado)113 Ulnt Puerto de red-número de fallos de configuración114 Ulnt Puerto de red-número de fallos115 Ulnt Reinicio automático-número116 Ulnt Sobrecarga térmica-número de advertencias117-118 UDlnt Motor-número de arranques119-120 UDlnt Tiempo de funcionamiento (s)121 lnt Controlador-temperatura interna máx. (°C)
Registro Tipo de variable Variables de sólo lectura Nota (véase página 31)
122 Ulnt Fallos-número123 Ulnt Advertencias-número 124-125 UDlnt Motor-número de arranques L01126-127 UDlnt Motor-número de arranques L02128 Ulnt Diagnósticos-número de fallos129 Ulnt (Reservados)
40 DOCA0130ES-01 07/2018
Uso de la red de comunicación Modbus
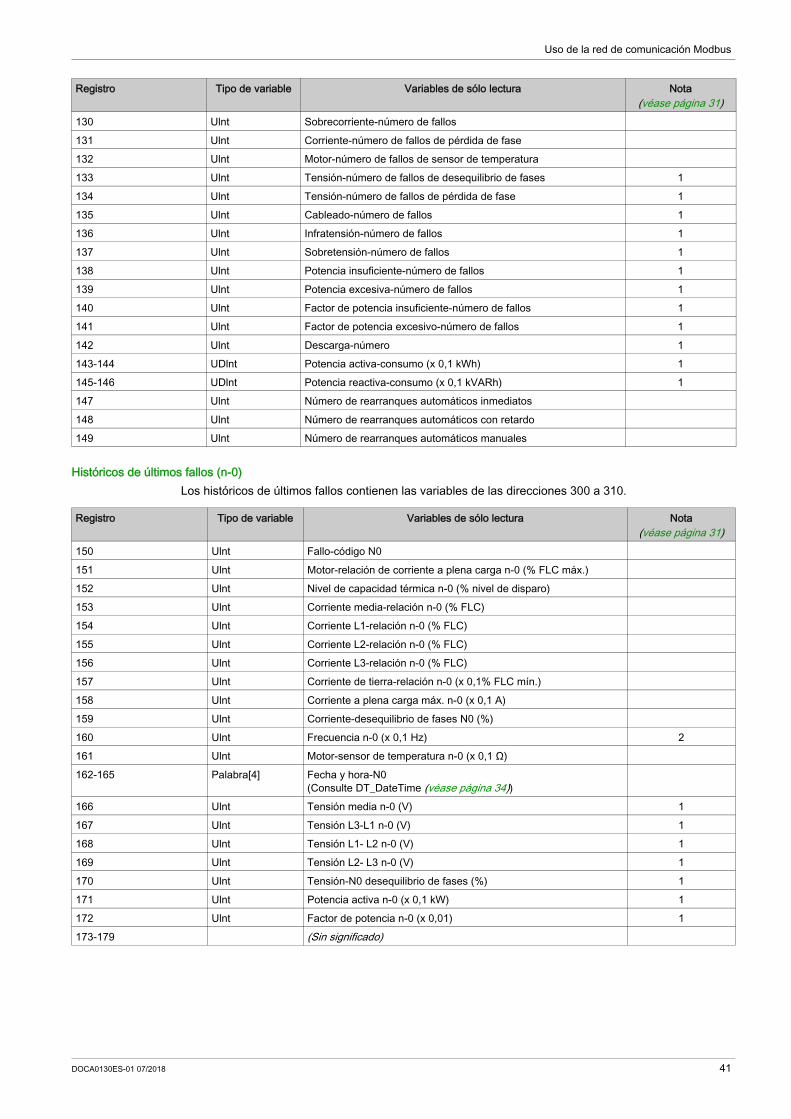
Históricos de últimos fallos (n-0) Los históricos de últimos fallos contienen las variables de las direcciones 300 a 310.
130 Ulnt Sobrecorriente-número de fallos131 Ulnt Corriente-número de fallos de pérdida de fase132 Ulnt Motor-número de fallos de sensor de temperatura133 Ulnt Tensión-número de fallos de desequilibrio de fases 1134 Ulnt Tensión-número de fallos de pérdida de fase 1135 Ulnt Cableado-número de fallos 1136 Ulnt Infratensión-número de fallos 1137 Ulnt Sobretensión-número de fallos 1138 Ulnt Potencia insuficiente-número de fallos 1139 Ulnt Potencia excesiva-número de fallos 1140 Ulnt Factor de potencia insuficiente-número de fallos 1141 Ulnt Factor de potencia excesivo-número de fallos 1142 Ulnt Descarga-número 1143-144 UDlnt Potencia activa-consumo (x 0,1 kWh) 1145-146 UDlnt Potencia reactiva-consumo (x 0,1 kVARh) 1147 Ulnt Número de rearranques automáticos inmediatos 148 Ulnt Número de rearranques automáticos con retardo 149 Ulnt Número de rearranques automáticos manuales
Registro Tipo de variable Variables de sólo lectura Nota (véase página 31)
Registro Tipo de variable Variables de sólo lectura Nota (véase página 31)
150 Ulnt Fallo-código N0 151 Ulnt Motor-relación de corriente a plena carga n-0 (% FLC máx.)152 Ulnt Nivel de capacidad térmica n-0 (% nivel de disparo)153 Ulnt Corriente media-relación n-0 (% FLC)154 Ulnt Corriente L1-relación n-0 (% FLC)155 Ulnt Corriente L2-relación n-0 (% FLC)156 Ulnt Corriente L3-relación n-0 (% FLC)157 Ulnt Corriente de tierra-relación n-0 (x 0,1% FLC mín.)158 Ulnt Corriente a plena carga máx. n-0 (x 0,1 A)159 Ulnt Corriente-desequilibrio de fases N0 (%)160 Ulnt Frecuencia n-0 (x 0,1 Hz) 2161 Ulnt Motor-sensor de temperatura n-0 (x 0,1 Ω)162-165 Palabra[4] Fecha y hora-N0
(Consulte DT_DateTime (véase página 34))166 Ulnt Tensión media n-0 (V) 1167 Ulnt Tensión L3-L1 n-0 (V) 1168 Ulnt Tensión L1- L2 n-0 (V) 1169 Ulnt Tensión L2- L3 n-0 (V) 1170 Ulnt Tensión-N0 desequilibrio de fases (%) 1171 Ulnt Potencia activa n-0 (x 0,1 kW) 1172 Ulnt Factor de potencia n-0 (x 0,01) 1173-179 (Sin significado)
DOCA0130ES-01 07/2018 41

Uso de la red de comunicación Modbus
Históricos de fallos N-1Los históricos de fallos n-1 contienen las variables de las direcciones 330 a 340.
Históricos de fallos N-2Los históricos de fallos n-2 contienen las variables de las direcciones 360 a 370.
Registro Tipo de variable Variables de sólo lectura Nota (véase página 31)
180 Ulnt Fallo-código N1 181 Ulnt Motor-relación de corriente a plena carga n-1 (% FLC máx.)182 Ulnt Nivel de capacidad térmica n-1 (% nivel de disparo)183 Ulnt Corriente media-relación n-1 (% FLC)184 Ulnt Corriente L1-relación n-1 (% FLC)185 Ulnt Corriente L2-relación n-1 (% FLC)186 Ulnt Corriente L3-relación n-1 (% FLC)187 Ulnt Corriente de tierra-relación n-1 (x 0,1% FLC mín.)188 Ulnt Corriente a plena carga máx. n-1 (x 0,1 A)189 Ulnt Corriente-desequilibrio de fases N1 (%)190 Ulnt Frecuencia n-1 (x 0,1 Hz) 2191 Ulnt Motor-sensor de temperatura n-1 (x 0,1 Ω)192-195 Palabra[4] Fecha y hora-N1
(Consulte DT_DateTime (véase página 34))196 Ulnt Tensión media n-1 (V) 1197 Ulnt Tensión L3- L1 n-1 (V) 1198 Ulnt Tensión L1- L2 n-1 (V) 1199 Ulnt Tensión L2- L3 n-1 (V) 1200 Ulnt Tensión-N1 desequilibrio de fases (%) 1201 Ulnt Potencia activa n-1 (x 0,1 kW) 1202 Ulnt Factor de potencia n-1 (x 0,01) 1203-209 Ulnt (Sin significado)
Registro Tipo de variable Variables de sólo lectura Nota (véase página 31)
210 Ulnt Fallo-código N2 211 Ulnt Motor-relación de corriente a plena carga n-2 (% FLC máx.)212 Ulnt Nivel de capacidad térmica n-2 (% nivel de disparo)213 Ulnt Corriente media-relación n-2 (% FLC)214 Ulnt Corriente L1-relación n-2 (% FLC)215 Ulnt Corriente L2-relación n-2 (% FLC)216 Ulnt Corriente L3-relación n-2 (% FLC)217 Ulnt Corriente de tierra-relación n-2 (x 0,1% FLC mín.)218 Ulnt Corriente a plena carga máx. n-2 (x 0,1 A)219 Ulnt Corriente-desequilibrio de fases N2 (%)220 Ulnt Frecuencia n-2 (x 0,1 Hz) 2221 Ulnt Motor-sensor de temperatura n-2 (x 0,1 Ω)222-225 Palabra[4] Fecha y hora-N2
(Consulte DT_DateTime (véase página 34))226 Ulnt Tensión media n-2 (V) 1227 Ulnt Tensión L3- L1 n-2 (V) 1
42 DOCA0130ES-01 07/2018

Uso de la red de comunicación Modbus
Históricos de fallos N-3Los históricos de fallos n-3 contienen las variables de las direcciones 390 a 400.
Históricos de fallos N-4Los históricos de fallos n-4 contienen las variables de las direcciones 420 a 430.
228 Ulnt Tensión L1- L2 n-2 (V) 1229 Ulnt Tensión L2- L3 n-2 (V) 1230 Ulnt Tensión-N2 desequilibrio de fases (%) 1231 Ulnt Potencia activa n-2 (x 0,1 kW) 1232 Ulnt Factor de potencia n-2 (x 0,01) 1233-239 (Sin significado)
Registro Tipo de variable Variables de sólo lectura Nota (véase página 31)
Registro Tipo de variable Variables de sólo lectura Nota (véase página 31)
240 Ulnt Fallo-código N3 241 Ulnt Motor-relación de corriente a plena carga n-3 (% FLC máx.)242 Ulnt Nivel de capacidad térmica n-3 (% nivel de disparo)243 Ulnt Corriente media-relación n-3 (% FLC)244 Ulnt Corriente L1-relación n-3 (% FLC)245 Ulnt Corriente L2-relación n-3 (% FLC)246 Ulnt Corriente L3-relación n-3 (% FLC)247 Ulnt Corriente de tierra-relación n-3 (x 0,1% FLC mín.)248 Ulnt Corriente a plena carga máx. n-3 (0,1 A)249 Ulnt Corriente-desequilibrio de fases N3 (%)250 Ulnt Frecuencia n-3 (x 0,1 Hz) 2251 Ulnt Motor-sensor de temperatura n-3 (x 0,1 Ω)252-255 Palabra[4] Fecha y hora-N3
(Consulte DT_DateTime (véase página 34))256 Ulnt Tensión media n-3 (V) 1257 Ulnt Tensión L3- L1 n-3 (V) 1258 Ulnt Tensión L1- L2 n-3 (V) 1259 Ulnt Tensión L2- L3 n-3 (V) 1260 Ulnt Tensión-N3 desequilibrio de fases (%) 1261 Ulnt Potencia activa n-3 (x 0,1 kW) 1262 Ulnt Factor de potencia n-3 (x 0,01) 1263-269 (Sin significado)
Registro Tipo de variable Variables de sólo lectura Nota (véase página 31)
270 Ulnt Fallo-código N4 271 Ulnt Motor-relación de corriente a plena carga n-4 (% FLC máx.)272 Ulnt Nivel de capacidad térmica n-4 (% nivel de disparo)273 Ulnt Corriente media-relación n-4 (% FLC)274 Ulnt Corriente L1-relación n-4 (% FLC)275 Ulnt Corriente L2-relación n-4 (% FLC)276 Ulnt Corriente L3-relación n-4 (% FLC)277 Ulnt Corriente de tierra-relación n-4 (x 0,1% FLC mín.)278 Ulnt Corriente a plena carga máx. n-4 (x 0,1 A)279 Ulnt Corriente-desequilibrio de fases N4 (%)280 Ulnt Frecuencia n-4 (x 0,1 Hz) 2
DOCA0130ES-01 07/2018 43

Uso de la red de comunicación Modbus
Extensión de históricos de últimos fallos (n-0)Los históricos principales de últimos fallos se muestran en las direcciones 150-179.
Extensión de históricos de fallos N-1 Los históricos principales de fallos n-1 se muestran en las direcciones 180-209.
Extensión de históricos de fallos N-2 Los históricos principales de fallos n-2 se muestran en las direcciones 210-239.
281 Ulnt Motor-sensor de temperatura n-4 (x 0,1 Ω)282-285 Palabra[4] Fecha y hora-N4
(Consulte DT_DateTime (véase página 34))286 Ulnt Tensión media n-4 (V) 1287 Ulnt Tensión L3- L1 n-4 (V) 1288 Ulnt Tensión L1- L2 n-4 (V) 1289 Ulnt Tensión L2- L3 n-4 (V) 1290 Ulnt Tensión-N4 desequilibrio de fases (%) 1291 Ulnt Potencia activa n-4 (x 0,1 kW) 1292 Ulnt Factor de potencia n-4 (x 0,01) 1293-299 (Sin significado)
Registro Tipo de variable Variables de sólo lectura Nota (véase página 31)
Registro Tipo de variable Variables de sólo lectura Nota (véase página 31)
300-301 UDlnt Corriente media n-0 (x 0,01 A)302-303 UDlnt Corriente L1 n-0 (x 0,01 A)304-305 UDlnt Corriente L2 n-0 (x 0,01 A)306-307 UDlnt Corriente L3 n-0 (x 0,01 A)308-309 UDlnt Corriente de tierra n-0 (mA)310 Ulnt Grado n-0 del sensor de temperatura del motor (°C)
Registro Tipo de variable Variables de sólo lectura Nota (véase página 31)
330-331 UDlnt Corriente media n-1 (x 0,01 A)332-333 UDlnt Corriente L1 n-1 (x 0,01 A)334-335 UDlnt Corriente L2 n-1 (x 0,01 A)336-337 UDlnt Corriente L3 n-1 (x 0,01 A)338-339 UDlnt Corriente de tierra n-1 (mA)340 Ulnt Grado del sensor de temperatura del motor n-1(°C)
Registro Tipo de variable Variables de sólo lectura Nota (véase página 31)
360-361 UDlnt Corriente media n-2 (x 0,01 A)362-363 UDlnt Corriente L1 n-2 (x 0,01 A)364-365 UDlnt Corriente L2 n-2 (x 0,01 A)366-367 UDlnt Corriente L3 n-2 (x 0,01 A)368-369 UDlnt Corriente de tierra n-2 (mA)370 Ulnt Grado del sensor de temperatura del motor n-2(°C)
44 DOCA0130ES-01 07/2018

Uso de la red de comunicación Modbus
Extensión de históricos de fallos N-3 Los históricos principales de fallos n-3 se muestran en las direcciones 240-269.
Extensión de históricos de fallos N-4 Los históricos principales de fallos n-4 se muestran en las direcciones 270-299.
Registro Tipo de variable Variables de sólo lectura Nota (véase página 31)
390-391 UDlnt Corriente media n-3 (x 0,01 A)392-393 UDlnt Corriente L1 n-3 (x 0,01 A)394-395 UDlnt Corriente L2 n-3 (x 0,01 A)396-397 UDlnt Corriente L3 n-3 (x 0,01 A)398-399 UDlnt Corriente de tierra n-3 (mA)400 Ulnt Grado del sensor de temperatura del motor n-3(°C)
Registro Tipo de variable Variables de sólo lectura Nota (véase página 31)
420-421 UDlnt Corriente media n-4 (x 0,01 A)422-423 UDlnt Corriente L1 n-4 (x 0,01 A)424-425 UDlnt Corriente L2 n-4 (x 0,01 A)426-427 UDlnt Corriente L3 n-4 (x 0,01 A)428-429 UDlnt Corriente de tierra n-4 (mA)430 Ulnt Grado del sensor de temperatura del motor n-0(°C)
DOCA0130ES-01 07/2018 45

Uso de la red de comunicación Modbus
Variables de supervisión
Descripción general de la supervisiónLas variables de supervisión están agrupadas según los criterios siguientes:
Supervisión de fallosLas variables para la supervisión de fallos se describen en la tabla siguiente:
Grupos de variables de supervisión RegistrosSupervisión de fallos 450 a 454Supervisión de estado 455 a 459Supervisión de advertencias 460 a 464Supervisión de mediciones 465 a 539
Registro Tipo de variable Variables de sólo lectura Nota (véase página 31)
450 Ulnt Mínimo-tiempo de espera (s)451 Ulnt Fallo-código (código del último fallo, o del fallo que tiene prioridad)
(Consulte DT_FaultCode (véase página 36)). 452 Palabra Registro de fallos 1
bits 0-1 (Reservados)bit 2 Fallo-corriente de tierrabit 3 Fallo-sobrecarga térmicabit 4 Fallo-arranque prolongadobit 5 Fallo-agarrotamientobit 6 Fallo-desequilibrio de fases de corrientebit 7 Fallo-infracorrientebit 8 (Reservado)bit 9 Fallo-prueba bit 10 Fallo-puerto de HMIbit 11 Fallo-controlador internobit 12 Fallo-puerto internobit 13 (Sin significado)bit 14 Fallo-configuración de puerto de redbit 15 Fallo-puerto de red
453 Palabra Fallo-registro 2bit 0 Fallo-sistema externobit 1 Fallo-diagnósticobit 2 Fallo-cableadobit 3 Fallo-sobrecorrientebit 4 Fallo-pérdida de fase de corrientebit 5 Fallo-inversión de fases de corrientebit 6 Fallo-sensor de temperatura del motor 1bit 7 Fallo-desequilibrio de fases de tensión 1bit 8 Fallo-pérdida de fase de tensión 1bit 9 Fallo-inversión de fases de tensión 1bit 10 Fallo-infratensión 1bit 11 Fallo-sobretensión 1bit 12 Fallo-potencia insuficiente 1bit 13 Fallo-potencia excesiva 1bit 14 Fallo-factor de potencia insuficiente 1bit 15 Fallo-factor de potencia excesivo 1
46 DOCA0130ES-01 07/2018

Uso de la red de comunicación Modbus
Supervisión de estadoLas variables de supervisión de estado se describen en la siguiente tabla:
454 Palabra Fallo-registro 3bit 0 Fallo de configuración de LTMEbit 1 Fallo de configuración de LTMRbits 2-15 (Reservados)
Registro Tipo de variable Variables de sólo lectura Nota (véase página 31)
Registro Tipo de variable Variables de sólo lectura Nota (véase página 31)
455 Palabra Estado del sistema-registro 1bit 0 Sistema-listobit 1 Sistema-activadobit 2 Sistema-fallo bit 3 Sistema-advertencia bit 4 Sistema-disparadobit 5 Reinicio de fallo-autorizadobit 6 Controlador-potenciabit 7 Motor-en marcha (con detección de corriente, si es superior al 10% de FLC)bits 8-13 Motor-relación de corriente media 32 = 100% FLC - 63 = 200% FLCbit 14 En remotobit 15 Motor-en arranque (arranque en curso) 0 = la corriente de bajada es inferior al 150% de FLC 1 = la corriente de subida es superior al 10% de FLC
456 Palabra Registro 2 de estado del sistemabit 0 Reinicio automático activobit 1 (Sin significado)bit 2 Fallo-petición de apagar y encenderbit 3 Motor-tiempo de reinicio indeterminadobit 4 Ciclo rápido-bloqueobit 5 Descarga 1bit 6 Motor-velocidad Parámetro utilizado 0 = FLC1 Parámetro utilizado 1 = FLC2bit 7 Puerto de HMI-pérdida de comunicaciónbit 8 Puerto de red-pérdida de comunicaciónbit 9 Motor-bloqueo de transiciónbits 10-15 (Sin significado)
DOCA0130ES-01 07/2018 47

Uso de la red de comunicación Modbus
457 Palabra Estado-entradas lógicasbit 0 Entrada lógica 1bit 1 Entrada lógica 2bit 2 Entrada lógica 3bit 3 Entrada lógica 4bit 4 Entrada lógica 5bit 5 Entrada lógica 6bit 6 Entrada lógica 7 1bit 7 Entrada lógica 8 1bit 8 Entrada lógica 9 1bit 9 Entrada lógica 10 1bit 10 Entrada lógica 11 1bit 11 Entrada lógica 12 1bit 12 Entrada lógica 13 1bit 13 Entrada lógica 14 1bit 14 Entrada lógica 15 1bit 15 Entrada lógica 16 1
458 Palabra Estado-salidas lógicasbit 0 Salida lógica 1bit 1 Salida lógica 2bit 2 Salida lógica 3bit 3 Salida lógica 4bit 4 Salida lógica 5 1bit 5 Salida lógica 6 1bit 6 Salida lógica 7 1bit 7 Salida lógica 8 1bits 8-15 (Reservados)
459 Palabra Estado de E/Sbit 0 Entrada 1bit 1 Entrada 2bit 2 Entrada 3bit 3 Entrada 4bit 4 Entrada 5bit 5 Entrada 6bit 6 Entrada 7bit 7 Entrada 8bit 8 Entrada 9bit 9 Entrada 10bit 10 Entrada 11bit 11 Entrada 12bit 12 Salida 1 (13-14)bit 13 Salida 2 (23-24)bit 14 Salida 3 (33-34)bit 15 Salida 4 (95-96, 97-98)
Registro Tipo de variable Variables de sólo lectura Nota (véase página 31)
48 DOCA0130ES-01 07/2018
Uso de la red de comunicación Modbus
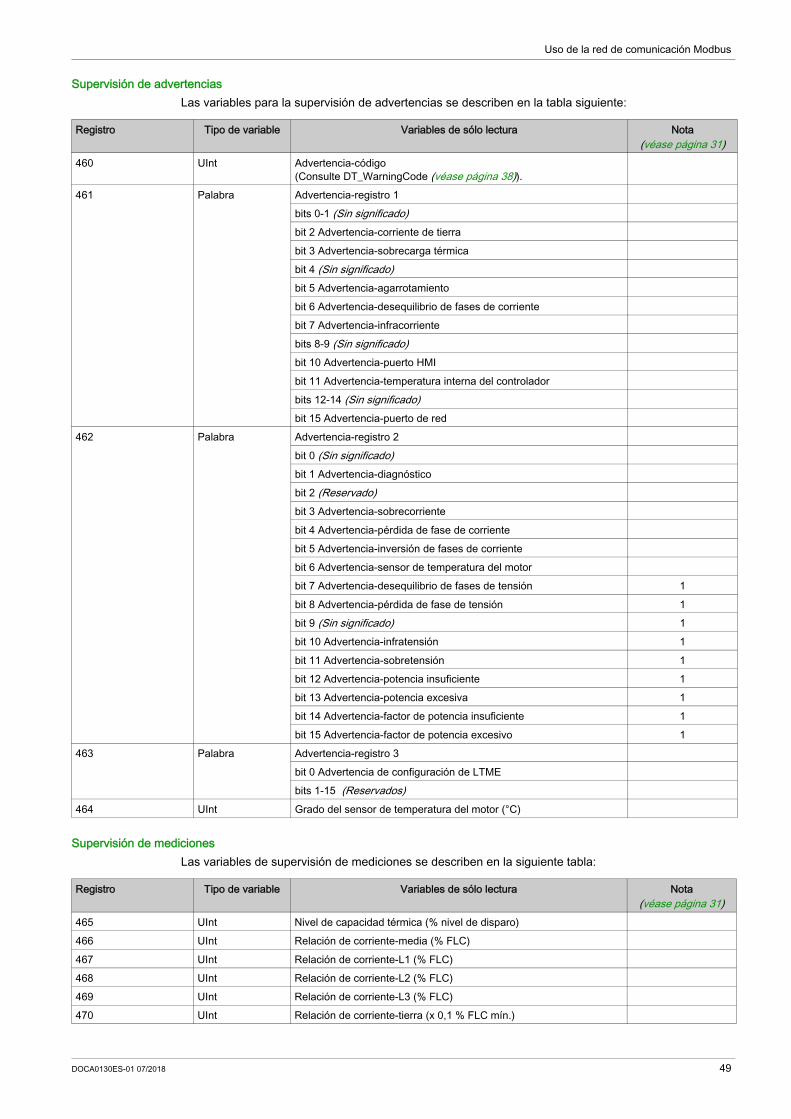
Supervisión de advertenciasLas variables para la supervisión de advertencias se describen en la tabla siguiente:
Supervisión de medicionesLas variables de supervisión de mediciones se describen en la siguiente tabla:
Registro Tipo de variable Variables de sólo lectura Nota (véase página 31)
460 UInt Advertencia-código(Consulte DT_WarningCode (véase página 38)).
461 Palabra Advertencia-registro 1bits 0-1 (Sin significado)bit 2 Advertencia-corriente de tierrabit 3 Advertencia-sobrecarga térmicabit 4 (Sin significado)bit 5 Advertencia-agarrotamientobit 6 Advertencia-desequilibrio de fases de corrientebit 7 Advertencia-infracorrientebits 8-9 (Sin significado)bit 10 Advertencia-puerto HMIbit 11 Advertencia-temperatura interna del controladorbits 12-14 (Sin significado)bit 15 Advertencia-puerto de red
462 Palabra Advertencia-registro 2bit 0 (Sin significado)bit 1 Advertencia-diagnósticobit 2 (Reservado)bit 3 Advertencia-sobrecorrientebit 4 Advertencia-pérdida de fase de corrientebit 5 Advertencia-inversión de fases de corrientebit 6 Advertencia-sensor de temperatura del motorbit 7 Advertencia-desequilibrio de fases de tensión 1bit 8 Advertencia-pérdida de fase de tensión 1bit 9 (Sin significado) 1bit 10 Advertencia-infratensión 1bit 11 Advertencia-sobretensión 1bit 12 Advertencia-potencia insuficiente 1bit 13 Advertencia-potencia excesiva 1bit 14 Advertencia-factor de potencia insuficiente 1bit 15 Advertencia-factor de potencia excesivo 1
463 Palabra Advertencia-registro 3bit 0 Advertencia de configuración de LTMEbits 1-15 (Reservados)
464 UInt Grado del sensor de temperatura del motor (°C)
Registro Tipo de variable Variables de sólo lectura Nota (véase página 31)
465 UInt Nivel de capacidad térmica (% nivel de disparo)466 UInt Relación de corriente-media (% FLC)467 UInt Relación de corriente-L1 (% FLC)468 UInt Relación de corriente-L2 (% FLC)469 UInt Relación de corriente-L3 (% FLC)470 UInt Relación de corriente-tierra (x 0,1 % FLC mín.)
DOCA0130ES-01 07/2018 49

Uso de la red de comunicación Modbus
471 UInt Corriente-desequilibrio de fases (%)472 Int Controlador-temperatura interna (°C)473 UInt Controlador-configuración de suma de comprobación474 UInt Frecuencia (x 0,01 Hz) 2475 UInt Motor-sensor de temperatura (x 0,1 Ω)476 UInt Tensión-media (V) 1477 UInt Tensión L3-L1 (V) 1478 UInt Tensión L1-L2 (V) 1479 UInt Tensión-L2-L3 (V) 1480 UInt Tensión-desequilibrio de fases (%) 1481 UInt Factor de potencia (x 0,01) 1482 UInt Potencia activa (x 0,1 kW) 1483 UInt Potencia reactiva (x 0,1 kVAR) 1484 Palabra Rearranque automático-registro de estado
bit 0 Caída de tensión-producidabit 1 Caída de tensión-detecciónbit 2 Rearranque automático-condición inmediatabit 3 Rearranque automático-condición con retardobit 4 Rearranque automático-condición manualbits 5-15 (Sin significado)
485 Palabra Duración del último apagado del controlador486-489 Palabra (Sin significado)490 Palabra Puerto de red-supervisión
bit 0 Puerto de red-supervisión en cursobit 1 Puerto de red-conectadobit 2 Puerto de red-comprobación automática en cursobit 3 Puerto de red-detección automática en cursobit 4 Puerto de red-configuración incorrectabits 5-15 (Sin significado)
491 UInt Puerto de red-velocidad de transmisión en baudios(Consulte DT_ExtBaudRate (véase página 35)).
492 (Sin significado)493 UInt Puerto de red-paridad
(Consulte DT_ExtParity (véase página 35)). 494-499 (Sin significado)500-501 UDInt Corriente-media (x 0,01 A)502-503 UDInt Corriente-L1 (x 0,01 A)504-505 UDInt Corriente-L2 (x 0,01 A)506-507 UDInt Corriente-L3 (x 0,01 A)508-509 UDInt Corriente-tierra (mA)510 UInt Controlador-ID de puerto511 UInt Tiempo hasta el disparo (x 1 s)512 UInt Motor-corriente del último arranque (% FLC)513 UInt Motor-duración del último arranque (s)514 UInt Motor-número de arranques por hora
Registro Tipo de variable Variables de sólo lectura Nota (véase página 31)
50 DOCA0130ES-01 07/2018

Uso de la red de comunicación Modbus
515 Palabra Registro de desequilibrio de fasesbit 0 Desequilibrio superior de corriente-L1bit 1 Corriente L2-desequilibrio superiorbit 2 Corriente L3-desequilibrio superiorbit 3 Desequilibrio superior de tensión-L1-L2 1bit 4 Tensión L2-L3-desequilibrio superior 1bit 5 Tensión L3-L1-desequilibrio superior 1bits 6-15 (Sin significado)
516 - 523 (Reservados)524 - 539 (Prohibido)
Registro Tipo de variable Variables de sólo lectura Nota (véase página 31)
DOCA0130ES-01 07/2018 51

Uso de la red de comunicación Modbus
Variables de configuración
Descripción general de la configuraciónLas variables de configuración están agrupadas según los criterios siguientes:
Variables de configuraciónLas variables de configuración se describen en la tabla siguiente:
Grupos de variables de configuración RegistrosConfiguración 540 a 649Ajuste 650 a 699
Registro Tipo de variable Variables de lectura / escritura Nota (véase página 31)
540 UInt Modalidad de funcionamiento del motor 2 = Sobrecarga 2 hilos 3 = Sobrecarga 3 hilos 4 = Independiente 2 hilos 5 = Independiente 3 hilos 6 = 2 sentidos de marcha 2 hilos 7 = 2 sentidos de marcha 3 hilos 8 = 2 tiempos 2 hilos 9 = 2 tiempos 3 hilos 10 = 2 velocidades 2 hilos 11 = 2 velocidades 3 hilos 256-511 = Programa de lógica personalizada (0-255)
B
541 UInt Motor-tiempo sobrepasado de transición (s)542-544 (Reservados)545 Palabra Registro de configuración de las entradas de CA del controlador
bits 0-3 Controlador-configuración de entradas lógicas de CA (Consulte DC_ACInputSetting (véase página 33))bits 4-15 (Reservados)
546 UInt Sobrecarga térmica-configuración Bbits 0-2 Motor-tipo de sensor de temperatura 0 = Ninguno 1 = PTC binario 2 = PT100 3 = PTC analógico 4 = NTC analógicobits 3-4 Sobrecarga térmica-modo 0 = Definitiva 2 = Térmica inversabits 5-15 (Reservados)
547 UInt Sobrecarga térmica-tiempo sobrepasado definitivo de fallo548 (Reservados)549 UInt Motor-umbral de fallo de sensor de temperatura (x 0,1 Ω)550 UInt Motor-umbral de advertencia de sensor de temperatura (x 0,1 Ω)551 UInt Sensor de temperatura del motor-umbral de fallo en grados (°C)552 UInt Sensor de temperatura del motor-umbral de advertencia en grados (°C)553 UInt Ciclo rápido-tiempo sobrepasado de bloqueo (s)554 (Reservados)555 UInt Pérdida de fase corriente-tiempo sobrepasado (x 0,1 s)556 UInt Sobrecorriente-tiempo sobrepasado de fallo (s)557 UInt Sobrecorriente-umbral de fallo (% FLC)558 UInt sobrecorriente-umbral de advertencia (% FLC)
52 DOCA0130ES-01 07/2018

Uso de la red de comunicación Modbus
559 Palabra Corriente de tierra-configuración de fallo Bbit 0 Corriente de tierra-modobit 1 Fallo de tierra desactivado durante el encendidobits 2-15 (Reservados)
560 UInt CT de tierra primario 561 UInt CT de tierra secundario 562 UInt Corriente de tierra externa-tiempo sobrepasado de fallo (x 0,01 s)563 UInt Corriente de tierra externa-umbral de fallo (x 0,01 A)564 UInt Corriente de tierra externa-umbral de advertencia (x 0,01 A)565 UInt Motor-tensión nominal (V) 1566 UInt Desequilibrio de fases de tensión-tiempo sobrepasado de fallo en arranque (x
0,1 s)1
567 UInt Desequilibrio de fases de tensión-tiempo sobrepasado de fallo en marcha (x 0,1 s)
1
568 UInt Desequilibrio de fases de tensión-umbral de fallo (% deseq.) 1569 UInt Desequilibrio de fases de tensión-umbral de advertencia (% deseq.) 1570 UInt Sobretensión-tiempo sobrepasado de fallo (x 0,1 s) 1571 UInt Sobretensión-umbral de fallo (% Vnom) 1572 UInt Sobretensión-umbral de advertencia (% Vnom) 1573 UInt Timeout de fallo por infratensión 1574 UInt Infratensión-umbral de fallo (% Vnom) 1575 UInt Infratensión-umbral de advertencia (% Vnom) 1576 UInt Pérdida de fase de tensión-tiempo sobrepasado de fallo (x 0,1 s) 1577 Palabra Caída de tensión-configuración 1
bits 0-1 Caída de tensión-modo 0 = Ninguno (ajuste de fábrica) 1 = Descarga 2 = Rearranque automáticobits 3-15 (Reservados)
578 UInt Descarga-tiempo sobrepasado (s) 1579 UInt Caída de tensión-umbral (% Vnom) 1580 UInt Caída de tensión-tiempo sobrepasado de rearranque (s) 1581 UInt Caída de tensión-umbral de rearranque (% Vnom) 1582 UInt Tiempo sobrepasado de rearranque automático inmediato (x 0,1 s)583 UInt Motor-potencia nominal (x 0,1 kW) 1584 UInt Potencia excesiva-tiempo sobrepasado de fallo (s) 1585 UInt Potencia excesiva-umbral de fallo (% Pnom) 1586 UInt Potencia excesiva-umbral de advertencia (% Pnom) 1587 UInt Potencia insuficiente-tiempo sobrepasado de fallo (s) 1588 UInt Potencia insuficiente-umbral de fallo (% Pnom) 1589 UInt Potencia insuficiente-umbral de advertencia (% Pnom) 1590 UInt Factor de potencia insuficiente-tiempo sobrepasado de fallo (x 0,1 s) 1591 UInt Factor de potencia insuficiente-umbral de fallo (x 0,01 PF) 1592 UInt Factor de potencia insuficiente-umbral de advertencia (x 0,01 PF) 1593 UInt Factor de potencia excesivo-tiempo sobrepasado de fallo (x 0,1 s) 1594 UInt Factor de potencia excesivo-umbral de fallo (x 0,01 PF) 1595 UInt Factor de potencia excesivo-umbral de advertencia (x 0,01 PF) 1596 UInt Tiempo sobrepasado de rearranque automático con retardo (s)597-599 (Reservados)600 (Sin significado)
Registro Tipo de variable Variables de lectura / escritura Nota (véase página 31)
DOCA0130ES-01 07/2018 53

Uso de la red de comunicación Modbus
601 Palabra Configuración general-registro 1bit 0 Controlador-configuración necesaria de sistema 0 = Salir del menú de configuración 1 = Ir al menú de configuración
A
bits 1-7 (Reservados)Configuración del modo de control, bits 8-10 (un bit se establece en 1):bit 8 Configuración mediante-activación de teclado de HMIbit 9 Configuración mediante-activación de herramienta de ingeniería de HMIbit 10 Configuración mediante-activación de puerto de redbit 11 Motor-estrella-triángulo Bbit 12 Motor-secuencia de fases 0 = A B C 1 = A C Bbits 13-14 Motor-fases (Consulte DT_PhaseNumber (véase página 37))
B
bit 15 Motor-refrigeración por ventilador auxiliar (ajuste de fábrica = 0)602 Palabra Configuración general-registro 2
bits 0-2 Fallo-modo de reinicio (Consulte DT_ResetMode (véase página 37))
C
bit 3 HMI-ajuste de paridad de puerto 0 = Ninguno 1 = par (ajuste de fábrica)bits 4-8 (Reservados)bit 9 Puerto de HMI-ajuste endianbit 10 Puerto de red-ajuste endianbit 11 HMI - color de LED de estado del motorbits 12-15 (Reservados)
603 Ulnt Puerto de HMI-ajuste de dirección604 Ulnt Puerto de HMI-ajuste de velocidad de transmisión en baudios (baudios)605 (Reservados)606 Ulnt Motor-clase de disparo (s)607 (Reservados)608 Ulnt Sobrecarga térmica-umbral de reinicio tras fallo (% nivel disparo)609 Ulnt Sobrecarga térmica-umbral de advertencia (% nivel disparo)610 UInt Corriente de tierra interna-tiempo sobrepasado de fallo (x 0,1 s)611 UInt Corriente de tierra interna-umbral de fallo (% FLCmín)612 UInt Corriente de tierra interna-umbral de advertencia (% FLCmín)613 UInt Desequilibrio de fases de corriente-tiempo sobrepasado de fallo en arranque
(x 0,1 s)614 UInt Desequilibrio de fases de corriente-tiempo sobrepasado de fallo en marcha (x
0,1 s)615 UInt Desequilibrio de fases de corriente-umbral de fallo (% deseq.)616 UInt Desequilibrio de fases de corriente-umbral de advertencia (% deseq.)617 UInt Agarrotamiento-tiempo sobrepasado de fallo (s)618 UInt Agarrotamiento-umbral de fallo (% FLC)619 UInt Agarrotamiento-umbral de advertencia (% FLC)620 UInt Infracorriente-tiempo sobrepasado de fallo (s)621 UInt Infracorriente-umbral de fallo (% FLC)622 UInt Infracorriente-umbral de advertencia (% FLC)623 UInt Arranque prolongado-tiempo sobrepasado de fallo (s)624 UInt Arranque prolongado-umbral de fallo (% FLC)625 (Reservados)
Registro Tipo de variable Variables de lectura / escritura Nota (véase página 31)
54 DOCA0130ES-01 07/2018
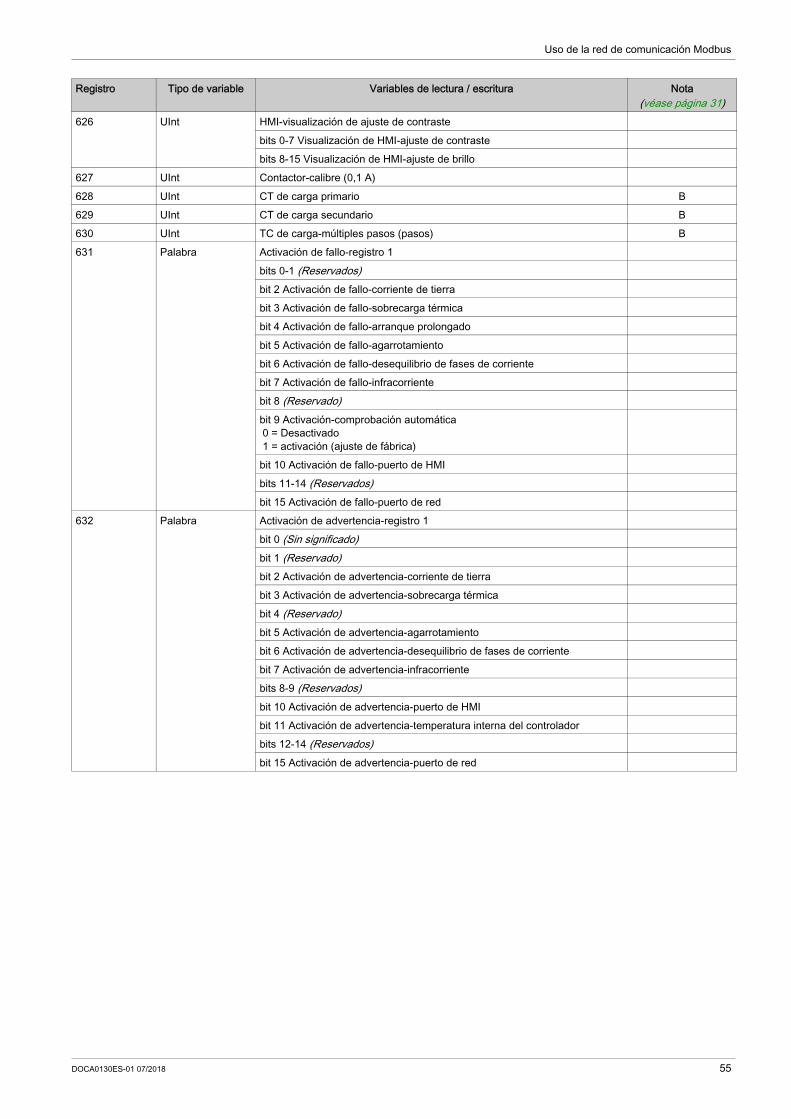
Uso de la red de comunicación Modbus
626 UInt HMI-visualización de ajuste de contrastebits 0-7 Visualización de HMI-ajuste de contrastebits 8-15 Visualización de HMI-ajuste de brillo
627 UInt Contactor-calibre (0,1 A)628 UInt CT de carga primario B629 UInt CT de carga secundario B630 UInt TC de carga-múltiples pasos (pasos) B631 Palabra Activación de fallo-registro 1
bits 0-1 (Reservados)bit 2 Activación de fallo-corriente de tierrabit 3 Activación de fallo-sobrecarga térmicabit 4 Activación de fallo-arranque prolongadobit 5 Activación de fallo-agarrotamientobit 6 Activación de fallo-desequilibrio de fases de corriente bit 7 Activación de fallo-infracorrientebit 8 (Reservado)bit 9 Activación-comprobación automática 0 = Desactivado 1 = activación (ajuste de fábrica)bit 10 Activación de fallo-puerto de HMIbits 11-14 (Reservados)bit 15 Activación de fallo-puerto de red
632 Palabra Activación de advertencia-registro 1bit 0 (Sin significado)bit 1 (Reservado)bit 2 Activación de advertencia-corriente de tierrabit 3 Activación de advertencia-sobrecarga térmicabit 4 (Reservado)bit 5 Activación de advertencia-agarrotamientobit 6 Activación de advertencia-desequilibrio de fases de corrientebit 7 Activación de advertencia-infracorrientebits 8-9 (Reservados)bit 10 Activación de advertencia-puerto de HMIbit 11 Activación de advertencia-temperatura interna del controladorbits 12-14 (Reservados)bit 15 Activación de advertencia-puerto de red
Registro Tipo de variable Variables de lectura / escritura Nota (véase página 31)
DOCA0130ES-01 07/2018 55

Uso de la red de comunicación Modbus
633 Palabra Activación de fallo-registro 2bit 0 (Reservado)bit 1 Activación de fallo-diagnósticobit 2 Activación de fallo-cableadobit 3 Activación de fallo-sobrecorrientebit 4 Activación de fallo-pérdida de fase de corrientebit 5 Activación de fallo-inversión de fases de corrientebit 6 Activación de fallo-sensor de temperatura del motorbit 7 Activación de fallo-desequilibrio de fases de tensión 1bit 8 Activación de fallo-pérdida de fase de tensión 1bit 9 Activación de fallo-inversión de fases de tensión 1bit 10 Activación de fallo-infratensión 1bit 11 Activación de fallo-sobretensión 1bit 12 Activación de fallo-potencia insuficiente 1bit 13 Activación de fallo-potencia excesiva 1bit 14 Activación de fallo-factor de potencia insuficiente 1bit 15 Activación de fallo-factor de potencia excesivo 1
634 Palabra Activación de advertencia-registro 2bit 0 (Reservado)bit 1 Activación de advertencia-diagnósticobit 2 (Reservado)bit 3 Activación de advertencia-sobrecorrientebit 4 Activación de advertencia-pérdida de fase de corrientebit 5 (Reservado)bit 6 Activación de advertencia-sensor de temperatura del motorbit 7 Activación de advertencia-desequilibrio de fases de tensión 1bit 8 Activación de advertencia-pérdida de fase de tensión 1bit 9 (Reservado) 1bit 10 Activación de advertencia-infratensión 1bit 11 Activación de advertencia-sobretensión 1bit 12 Activación de advertencia-potencia insuficiente 1bit 13 Activación de advertencia-potencia excesiva 1bit 14 Activación de advertencia-factor de potencia insuficiente 1bit 15 Activación de advertencia-factor de potencia excesivo 1
635-6 (Reservados)637 UInt Rearme automático-ajuste intentos grupo 1 (rearmes)638 UInt Rearme automático-tiempo sobrepasado de grupo 1 (s)639 UInt Rearme automático-ajuste intentos grupo 2 (rearmes)640 UInt Rearme automático-tiempo sobrepasado de grupo 2 (s)641 UInt Rearme automático-ajuste intentos grupo 3 (rearmes)642 UInt Rearme automático-tiempo sobrepasado de grupo 3 (s)643 UInt Motor-tiempo sobrepasado de paso 1 a 2 (x 0,1 s)644 UInt Motor-umbral de paso 1 a 2 (% FLC)645 UInt Ajuste de recuperación de puerto HMI
(Consulte DT_OutputFallbackStrategy (véase página 37))646-649 (Reservados)
Registro Tipo de variable Variables de lectura / escritura Nota (véase página 31)
56 DOCA0130ES-01 07/2018

Uso de la red de comunicación Modbus
Variables de ajusteLas variables de ajuste se describen en la tabla siguiente:
Registro Tipo de variable Variables de lectura / escritura Nota (véase página 31)
650 Palabra HMI-registro de ajuste de idioma:bits 0-4 HMI-ajuste de idioma (Consulte DT_Language5 (véase página 37))bits 5-15 (Sin significado)
651 Palabra HMI-registro 1 de elementos de visualización bit 0 Visualización de HMI-activación de corriente mediabit 1 Visualización de HMI-activación de nivel de capacidad térmicabit 2 Visualización de HMI-activación de corriente L1bit 3 Visualización de HMI-activación de corriente L2bit 4 Visualización de HMI-activación de corriente L3bit 5 Visualización de HMI-activación de corriente de tierrabit 6 Visualización de HMI-activación de estado del motorbit 7 Visualización de HMI-activación de desequilibrio de fases de corrientebit 8 Visualización de HMI-activación de tiempo de funcionamientobit 9 Visualización de HMI-activación de estado de E/Sbit 10 Visualización de HMI-activación de potencia reactivabit 11 Visualización de HMI-activación de frecuenciabit 12 Visualización de HMI-activación de arranques por horabit 13 HMI-activación de visualización del canal de controlbit 14 Visualización de HMI-activación de históricos de arranquebit 15 HMI-activación de sensor de temperatura del motor
652 Ulnt Motor-relación de corriente a plena carga, FLC1 (% FLCmáx)653 Ulnt Motor-relación de corriente a plena carga y alta velocidad, FLC2 (% FLCmáx)654 Palabra HMI-registro 2 de elementos de visualización
bit 0 Visualización de HMI-activación de tensión L1-L2 1bit 1 Visualización de HMI-activación de tensión L2-L3 1bit 2 Visualización de HMI-activación de tensión L3-L1 1bit 3 Visualización de HMI-activación de tensión media 1bit 4 Visualización de HMI-activación de potencia activa 1bit 5 Visualización de HMI-activación de consumo 1bit 6 Visualización de HMI-activación de factor de potencia 1bit 7 Visualización de HMI-activación de relación de corriente mediabit 8 Visualización de HMI-activación de relación de corriente L1 1bit 9 Visualización de HMI-activación de relación de corriente L2 1bit 10 Visualización de HMI-activación de relación de corriente L3 1bit 11 Visualización de HMI-activación de capacidad térmica restantebit 12 Visualización de HMI-activación de tiempo hasta el disparobit 13 Visualización de HMI-activación de desequilibrio de fases de tensión 1bit 14 Visualización de HMI-activación de fechabit 15 Visualización de HMI-activación de hora
655-658 Palabra[4] Ajuste-fecha y hora(Consulte DT_DateTime (véase página 34))
659 Palabra HMI-registro 3 de elementos de visualizaciónbit 0 Visualización de HMI-sensor de temperatura en grados CFbits 1-15 (Reservados)
660-681 (Reservados)682 Ulnt Puerto de red-ajuste de recuperación (consulte DT_OutputFallbackStrategy
(véase página 37))
DOCA0130ES-01 07/2018 57

Uso de la red de comunicación Modbus
683 Palabra Control-registro de ajustesbits 0-1 (Reservados)bit 2 Control a distancia-modo local predeterminado (con LTMCU) 0 = A distancia 1 = Localbit 3 (Reservado)bit 4 Control a distancia-activación de botones locales (con LTMCU) 0 = Desactivado 1 = Activadabits 5-6 Control a distancia-ajuste de canal (con LTMCU) 0 = Red 1 = Bornero de conexión 2 = HMIbit 7 (Reservado)bit 8 Control local-ajuste de canal 0 = Bornero de conexión 1 = HMIbit 9 Control-transición directa 0 = Parada necesaria durante la transición 1 = Parada no necesaria durante la transiciónbit 10 Control-modo de transferencia 0 = Con sacudidas 1 = Sin sacudidasbit 11 Bornero de detención-desactivación 0 = Activada 1 = Desactivadabit 12 Detención de HMI-desactivación 0 = Activada 1 = Desactivadabits 13-15 (Reservados)
684-692 (Reservados)693 Ulnt Puerto de red-tiempo sobrepasado de pérdida de comunicaciones (x 0,01 s)
(sólo Modbus)694 Ulnt Puerto de red-ajuste de paridad (sólo Modbus)695 Ulnt Puerto de red-ajuste de velocidad de transmisión en baudios (baudios)
(Consulte DT_ExtBaudRate (véase página 35))696 Ulnt Puerto de red-ajuste de dirección697-699 (Sin significado)
Registro Tipo de variable Variables de lectura / escritura Nota (véase página 31)
58 DOCA0130ES-01 07/2018

Uso de la red de comunicación Modbus
Variables de comandos
Variables de comandosLas variables de comandos se describen en la siguiente tabla:
Registro Tipo de variable Variables de lectura / escritura Nota (véase página 31)
700 Palabra Registro disponible para escribir comandos de forma remota que se pueden procesar en una lógica personalizada específica.
701-703 (Reservados)704 Palabra Registro de control 1
bit 0 Motor-comando de funcionamiento hacia delante (1)
bit 1 Motor-comando de funcionamiento hacia atrás (1)
bit 2 (Reservado)bit 3 Fallo-comando de reiniciobit 4 (Reservado)bit 5 Comprobación automática-comandobit 6 Motor-comando de baja velocidadbits 7-15 (Reservados)
705 Palabra Registro de control 2bit 0 Borrar todo-comandoBorrar todos los parámetros, excepto: Motor-número de arranques L01 Motor-número de arranques L02 Controlador-temperatura interna máx. Nivel de capacidad térmica
bit 1 Borrar históricos-comandobit 2 Borrar nivel de capacidad térmica-comandobit 3 Borrar configuración del controlador-comandobit 4 Borrar configuración de puerto de red-comandobits 5-15 (Reservados)
706-709 (Reservados)710-799 (Prohibido)(1) Incluso en el modo de sobrecarga, los bits 0 y 1 del registro 704 se pueden utilizar para controlar a distancia LO1 y LO2.
DOCA0130ES-01 07/2018 59

Uso de la red de comunicación Modbus
Variables de mapa de usuario
Variables de mapa de usuario Las variables de mapa de usuario se describen en la siguiente tabla:
Grupos de variables de mapa de usuario RegistrosMapa de usuario-direcciones 800 a 899Mapa de usuario-valores 900 a 999
Registro Tipo de variable Variables de lectura / escritura Nota (véase página 31)
800-898 Palabra[99] Mapa de usuario-direcciones899 (Reservados)
Registro Tipo de variable Variables de lectura / escritura Nota (véase página 31)
900-998 Palabra[99] Mapa de usuario-valores999 (Reservados)
60 DOCA0130ES-01 07/2018

Uso de la red de comunicación Modbus
Variables de lógica personalizada
Variables de lógica personalizadaLas variables de lógica personalizada se describen en la siguiente tabla:
Registro Tipo de variable Variables de sólo lectura Nota (véase página 31)
1200 Palabra Lógica personalizada-registro de estadobit 0 Lógica personalizada-marchabit 1 Lógica personalizada-paradabit 2 Lógica personalizada-reiniciobit 3 Lógica personalizada-segundo pasobit 4 Lógica personalizada-transiciónbit 5 Lógica personalizada-inversión de fasesbit 6 Lógica personalizada-control de redbit 7 Lógica personalizada-selección de FLCbit 8 (Reservado)bit 9 Lógica personalizada-LED aux. 1bit 10 Lógica personalizada-LED aux. 2bit 11 Lógica personalizada-LED de detenciónbit 12 Lógica personalizada-LO1bit 13 Lógica personalizada-LO2bit 14 Lógica personalizada-LO3bit 15 Lógica personalizada-LO4
1201 Palabra Lógica personalizada-versión1202 Palabra Lógica personalizada-espacio de memoria1203 Palabra Lógica personalizada-memoria utilizada1204 Palabra Lógica personalizada-espacio temporal1205 Palabra Lógica personalizada-espacio no volátil1206-1249 (Reservados)
Registro Tipo de variable Variables de lectura / escritura Nota (véase página 31)
1250 Palabra Lógica personalizada-registro 1bit 0 (Reservado)bit 1 Entrada lógica-activación de lectura externabits 2-15 (Reservados)
1251-1269 (Reservados)1270 Palabra Lógica personalizada-registro 1
bit 0 Lógica personalizada-comando de fallo externobits 1-15 (Reservados)
1271-1279 (Reservados)
DOCA0130ES-01 07/2018 61

Uso de la red de comunicación Modbus
Registro Tipo de variable Variables de sólo lectura Nota (véase página 31)
1280 Palabra Lógica personalizada-registro 1 de supervisiónbit 0 (Reservado)bit 1 Lógica personalizada-sistema listobits 2-15 (Reservados)
1281-1300 (Reservados)
Registro Tipo de variable Variables de lectura / escritura Nota (véase página 31)
1301-1399 Palabra[99] Registros de uso general de las funciones lógicas
62 DOCA0130ES-01 07/2018

TeSys T LTMRGlosarioDOCA0130ES 12/2017
Glosario
Aanalógica
Describe entradas (p.ej., la temperatura) o salidas (p.ej., la velocidad de un motor) que se pueden establecer en un rango de valores. Comparar con discreta.
CCANopen
Protocolo abierto estándar industrial utilizado en el bus de comunicaciones internas. Este protocolo permite conectar cualquier dispositivo CANopen estándar al bus de isla.
capacidad térmica inversaUna variedad de TCC donde el modelo térmico del motor genera la magnitud inicial del retardo de disparo, que varía en respuesta a los cambios en el valor de la cantidad medida (p.ej., la corriente). Comparar con tiempo definido.
configuración endian (big endian)‘big endian’ significa que el byte/palabra de orden superior del número se almacena en la memoria en la dirección más baja posible, y el byte/palabra de orden inferior, en la dirección más alta posible (el extremo de orden superior va primero).
configuración endian (little endian)‘little endian’ significa que el byte/palabra de orden inferior del número se almacena en la memoria en la dirección más baja posible, y el byte/palabra de orden superior, en la dirección más alta posible (el extremo de orden inferior va primero).
DDeviceNet™
DeviceNet™ es un protocolo de red basado en una conexión de bajo nivel que depende de CAN, un sistema de bus serie sin una capa de aplicación definida. DeviceNet, define, por lo tanto, una capa para la aplicación industrial de CAN.
DINDeutsches Institut für Normung. Organización europea que organiza la creación y el mantenimiento de estándares dimensionales y de ingeniería.
discretaDescribe las entradas (p. ej., interruptores) o salidas (p. ej., bobinas) que sólo pueden estar Activadas o Desactivadas. Comparar con analógica.
dispositivoA grandes rasgos, una unidad electrónica que se puede añadir a una red. Más en concreto, una unidad electrónica programable (p.ej., PLC, controlador numérico o robot) o una tarjeta de E/S.
DPSTbipolar/una posición. Interruptor que conecta o desconecta 2 conductores de circuito en un solo circuito de derivación. Un interruptor DPST tiene 4 terminales, y es el equivalente a 2 interruptores unipolares controlados por un solo mecanismo, como se ilustra a continuación:
DOCA0130ES-01 07/2018 63
Glosario
Eel factor de potencia
Llamado también coseno fi (o ϕ), el factor de potencia representa el valor absoluto de la relación de la potencia activa con la potencia aparente en sistemas de alimentación de CA.
EtherNet/IP(Ethernet Industrial Protocol) es un protocolo de aplicación industrial basado en los protocolos TCP/IP y CIP. Se utiliza principalmente en redes automatizadas. Define los dispositivos de red como objetos de red para permitir la comunicación entre el sistema de control industrial y sus componentes (controlador de automatización programable, controlador lógico programable, sistemas de I/O).
FFLC
corriente a plena carga. También conocida como corriente nominal. La corriente que recibe el motor según la tensión nominal y la carga máxima admisible. El controlador LTMR tiene dos ajustes de FLC: FLC1 (Relación de corriente a plena carga del motor) y FLC2 (Relación de corriente a plena carga y alta velocidad del motor), y cada uno se establece como porcentaje de FLC máx.
FLC1Relación de corriente a plena carga del motor. Parámetro de FLC para motores de velocidad baja o única.
FLC2Relación de corriente a plena carga y alta velocidad del motor. Parámetro de FLC para motores de alta velocidad.
FLCmáxCorriente a plena carga máx. Parámetro de corriente pico.
FLCmínCorriente a plena carga mínima. Valor más pequeño de corriente del motor que admite el controlador LTMR. Este valor viene determinado por el modelo de controlador LTMR.
Hhistéresis
Valor, sumado al límite de umbral inferior o restado del límite de umbral superior, que retarda la respuesta del controlador LTMR antes de que deje de medir la duración de los fallos y advertencias.
MModbus
Modbus es el nombre del protocolo de comunicación serie maestro-esclavo/cliente-servidor desarrollado en 1979 por Modicon (ahora Schneider Automation, Inc.), y desde entonces se ha convertido en el protocolo de red estándar para la automatización industrial.
NNTC
coeficiente negativo de temperatura. Característica de un termistor, una resistencia térmicamente sensible, cuya resistencia aumenta a medida que desciende su temperatura y disminuye cuando su temperatura se eleva.
NTC analógicoTipo de RTD.
PPLC
controlador lógico programable.
potencia activaConocida también como potencia real, la potencia activa es la tasa de producción, transferencia o uso de la energía eléctrica. Se mide en vatios (W), y a menudo se expresa en kilovatios (kW) o megavatios (MW).
64 DOCA0130ES-01 07/2018
Glosario
potencia aparenteLa potencia aparente (el producto de la corriente y la tensión) consta de potencia activa y potencia reactiva. Se mide en voltios-amperios, y a menudo se expresa en kilovoltios-amperios (kVA) o megavoltios-amperios (MVA).
potencia nominalPotencia nominal del motor. Parámetro de la potencia que generará un motor según la tensión nominal y la corriente nominal.
PROFIBUS DPSistema de bus abierto que utiliza una red eléctrica basada en un cable apantallado de dos hilos o una red óptica basada en un cable de fibra óptica.
PT100Tipo de RTD.
PTCcoeficiente positivo de temperatura. Característica de un termistor, una resistencia térmicamente sensible, cuya resistencia aumenta a medida que se eleva su temperatura y disminuye cuando su temperatura desciende.
PTC analógicoTipo de RTD.
PTC binarioTipo de RTD.
RRiel DIN
Riel de montaje de acero, creado conforme a los estándares DIN (normalmente 35 mm de ancho), que facilita el montaje "a presión" de dispositivos eléctricos IEC, como el controlador LTMR y el módulo de expansión. Comparar con la fijación con tornillos de dispositivos a un panel de control mediante el taladro de agujeros.
rmsvalor eficaz. Método para calcular la corriente y la tensión promedio de CA. Debido a que la corriente CA y la tensión CA son bidireccionales, el promedio aritmético de corriente o tensión CA siempre es igual a 0.
RTDdetector de temperatura de resistencia. Termistor (sensor de resistencia térmica) que se utiliza para medir la temperatura del motor. Es necesario para la función de protección del sensor de temperatura del motor del controlador LTMR.
TTC
transformador de corriente.
TCCcaracterística de curva de disparo. Tipo de retardo que se utiliza para disparar el flujo de corriente en respuesta a una condición de fallo. Cuando se implementan en el controlador LTMR, los retardos de disparo de todas las funciones de protección del motor son de tiempo definido, excepto en el caso de la función de sobrecarga térmica, que también ofrece retardos de disparo con capacidad térmica inversa.
tensión nominalTensión nominal del motor. Parámetro de la tensión nominal.
tiempo de reinicioTiempo entre un cambio repentino en la cantidad supervisada (p.ej., la corriente) y el cambio del relé de salida.
tiempo definidoUna variedad de TCC o TVC donde la magnitud inicial del retardo de disparo permanece constante y no varía en respuesta a los cambios en el valor de la cantidad medida (p.ej., la corriente). Comparar con capacidad térmica inversa.
DOCA0130ES-01 07/2018 65

Glosario
TVCcaracterística de tensión de disparo. Tipo de retardo que se utiliza para disparar el flujo de tensión en respuesta a una condición de fallo. En la implementación del controlador LTMR y el módulo de expansión, todas las TVC son de tiempo definido.
66 DOCA0130ES-01 07/2018

TeSys T LTMRÍndiceDOCA0130ES 12/2017
Índice
Specials
Aactivación de advertencia-
agarrotamiento, 55corriente de tierra, 55desequilibrio de fases de corriente, 55desequilibrio de fases de tensión, 56diagnóstico, 56factor de potencia excesivo, 56factor de potencia insuficiente, 56infracorriente, 55infratensión, 56pérdida de fase de corriente, 56pérdida de fase de tensión, 56potencia excesiva, 56potencia insuficiente, 56puerto de HMI, 55puerto de red, 55registro 1, 55registro 2, 56sensor de temperatura del motor, 56sobrecarga térmica, 55sobrecorriente, 56sobretensión, 56temperatura interna del controlador, 55
activación de fallo-agarrotamiento, 55arranque prolongado, 55cableado, 56corriente de tierra, 55desequilibrio de fases de corriente, 55desequilibrio de fases de tensión, 56diagnóstico, 56factor de potencia excesivo, 56factor de potencia insuficiente, 56infracorriente, 55infratensión, 56inversión de fases de corriente, 56inversión de fases de tensión, 56pérdida de fase de corriente, 56pérdida de fase de tensión, 56potencia excesiva, 56potencia insuficiente, 56prueba, 55puerto de HMI, 55puerto de red, 55registro 1, 55registro 2, 56sensor de temperatura del motor, 56sobrecarga térmica, 55sobrecorriente, 56sobretensión, 56
advertenciaconfiguración de LTME, 49
DOCA0130ES-01 07/2018
advertencia-agarrotamiento, 49corriente de tierra, 49desequilibrio de fases de corriente, 49desequilibrio de fases de tensión, 49diagnóstico, 49factor de potencia excesivo, 49factor de potencia insuficiente, 49infracorriente, 49infratensión, 49inversión de fases de corriente, 49pérdida de fase de corriente, 49pérdida de fase de tensión, 49potencia excesiva, 49potencia insuficiente, 49puerto de HMI, 49puerto de red, 49registro 1, 49registro 2, 49registro 3, 49sensor de temperatura del motor, 49sobrecarga térmica, 49sobrecorriente, 49sobretensión, 49temperatura interna del controlador, 49
advertencia-código, 49advertencias-número, 40agarrotamiento-
número de fallos, 40tiempo sobrepasado de fallo, 54umbral de advertencia, 54umbral de fallo, 54
ajuste de lógica personalizadaregistro 1, 61
arranque prolongado-número de fallos, 40tiempo sobrepasado de fallo, 54umbral de fallo, 54
Bbornero de detención-
desactivación, 58
Ccableado-
número de fallos, 41caída de tensión
modo, 53caída de tensión-
configuración, 53detección, 50producida, 50tiempo sobrepasado de rearranque, 53umbral, 53umbral de rearranque, 53
ciclo rápido-bloqueo, 47tiempo sobrepasado de bloqueo, 52
67
Índice
comandoborrar configuración de puerto de red, 59borrar configuración del controlador, 59borrar históricos, 59borrar nivel de capacidad térmica, 59borrar todo, 59motor comando de funcionamiento hacia atrás, 59motor comando de funcionamiento hacia delante, 59
comando de lógica personalizadafallo externo, 61registro 1, 61
comprobación automática-comando, 59
configuración general-registro 1, 54registro 2, 54
configuración mediante-activación de herramienta de ingeniería de HMI, 54activación de puerto de red, 54activación de teclado de HMI, 54
contactor-calibre, 55control a distancia-
activación de los botones locales, 58ajuste de canal, 58modo local predeterminado, 58
control local-ajuste de canal, 58
control-modo de transferencia, 58registro de ajustes, 58transición directa, 58
controladorconfiguración necesaria de sistema, 54duración del último apagado, 50referencia comercial, 39registro de configuración de las entradas de CA, 52
controlador-código de compatibilidad, 39código de identificación, 39configuración de entradas lógicas de CA, 52configuración de suma de comprobación, 50ID de puerto, 50número de fallos internos, 40número de serie, 39potencia, 47temperatura interna, 50temperatura interna máx., 40versión del firmware, 39
corriente a plena carga máx., 39n-0, 41n-1, 42n-2, 42n-3, 43n-4, 43
corriente de tierran-0, 44n-1, 44n-2, 44n-3, 45n-4, 45
68
corriente de tierra externa-tiempo sobrepasado de fallo, 53umbral de advertencia, 53umbral de fallo, 53
corriente de tierra interna-tiempo sobrepasado de fallo, 54umbral de advertencia, 54umbral de fallo, 54
corriente de tierra-configuración de fallo, 53modo, 53número de fallos, 40
corriente de tierra-relaciónn-0, 41n-1, 42n-2, 42n-3, 43n-4, 43
corriente L1n-0, 44n-1, 44n-2, 44n-3, 45n-4, 45
corriente L1-relaciónn-0, 41n-1, 42n-2, 42n-3, 43n-4, 43
corriente L2n-0, 44n-1, 44n-2, 44n-3, 45n-4, 45
corriente L2-desequilibrio superior, 51
corriente L2-relaciónn-0, 41n-1, 42n-2, 42n-3, 43n-4, 43
corriente L3n-0, 44n-1, 44n-2, 44n-3, 45n-4, 45
corriente L3-desequilibrio superior, 51
corriente L3-relaciónn-0, 41n-1, 42n-2, 42n-3, 43n-4, 43
corriente median-0, 44n-1, 44n-2, 44n-3, 45n-4, 45
DOCA0130ES-01 07/2018

Índice
corriente media-relaciónn-0, 41n-1, 42n-2, 42n-3, 43n-4, 43
corriente-L1, 50L2, 50L3, 50máx. del sensor, 39media, 50número de fallos de desequilibrio de fases, 40número de fallos de pérdida de fase, 41rango máx., 39relación de escala, 39tierra, 50
corriente-desequilibrio de fases, 50n-0, 41n-1, 42n-2, 42n-3, 43n-4, 43
CT de cargaprimario, 55secundario, 55
CT de carga-relación, 39
CT de tierraprimario, 53secundario, 53
Ddescarga, 47descarga-
tiempo sobrepasado, 53descarga-número, 41desequilibrio de fases de corriente-
tiempo sobrepasado de fallo en arranque, 54tiempo sobrepasado de fallo en marcha, 54umbral de advertencia, 54umbral de fallo, 54
desequilibrio de fases de tensión-tiempo sobrepasado de fallo en arranque, 53tiempo sobrepasado de fallo en marcha, 53umbral de advertencia, 53umbral de fallo, 53
desequilibrio superior de corriente-L1, 51
desequilibrio superior de tensión-L1-L2, 51
detención de HMI-desactivación, 58
diagnósticos-número de fallos, 40
Een remoto, 47entrada lógica 3
activación de lectura externa, 61estado de E/S, 48estado del sistema
registro 2, 47
DOCA0130ES-01 07/2018
estado del sistema-entradas lógicas, 48registro 1, 47salidas lógicas, 48
expansión-código de compatibilidad, 39código de identificación, 39número de serie, 39referencia comercial, 39versión de firmware, 39
Ffactor de potencia, 50
n-0, 41n-1, 42n-2, 43n-3, 43n-4, 44
factor de potencia excesivo-número de fallos, 41tiempo sobrepasado de fallo, 53umbral de advertencia, 53umbral de fallo, 53
factor de potencia insuficiente-número de fallos, 41tiempo sobrepasado de fallo, 53umbral de advertencia, 53umbral de fallo, 53
falloconfiguración de LTME, 47configuración de LTMR, 47
fallo de tierra desactivadomodo, 53
69
Índice
fallo-agarrotamiento, 46arranque prolongado, 46cableado, 46comando de reinicio, 59configuración de puerto de red, 46controlador interno, 46corriente de tierra, 46desequilibrio de fases de corriente, 46desequilibrio de fases de tensión, 46diagnóstico, 46factor de potencia excesivo, 46factor de potencia insuficiente, 46infracorriente, 46infratensión, 46inversión de fases de corriente, 46inversión de fases de tensión, 46pérdida de fase de corriente, 46pérdida de fase de tensión, 46potencia excesiva, 46potencia insuficiente, 46prueba, 46puerto de HMI, 46puerto de red, 46puerto interno, 46registro 2, 46registro 3, 47sensor de temperatura del motor, 46sistema externo, 46sobrecarga térmica, 46sobrecorriente, 46sobretensión, 46
fallo-código, 46n-0, 41n-1, 42n-2, 42n-3, 43n-4, 43
fallo-modo de reinicio, 54fallo-petición de apagar y encender, 47fallos-número, 40fecha y hora
n-0, 41n-1, 42n-2, 42n-3, 43n-4, 44
fecha y hora-ajuste, 57
frecuencia, 50n-0, 41n-1, 42n-2, 42n-3, 43n-4, 43
Ggrado del sensor de temperatura del motor, 49
n-0, 44n-1, 44n-2, 44n-3, 45n-4, 45
70
HHMI - color de LED de estado del motor, 54HMI-
activación de visualización del modo de control, 57ajuste de idioma, 57ajuste de paridad de puerto, 54número de fallos de puerto, 40registro de ajuste de idioma, 57
Iinfracorriente-
número de fallos, 40tiempo sobrepasado de fallo, 54umbral de advertencia, 54umbral de fallo, 54
infratensióntimeout de fallo, 53
infratensión-número de fallos, 41umbral de advertencia, 53umbral de fallo, 53
Llógica personalizada
registro de estado, 61segundo paso, 61
lógica personalizada-control de red, 61espacio de memoria, 61espacio no volátil, 61espacio temporal, 61inversión de fases, 61LED aux. 1, 61LED aux. 2, 61LED de detención, 61LO1, 61LO2, 61LO3, 61LO4, 61marcha , 61memoria utilizada, 61parada, 61reinicio, 61selección de FLC, 61transición, 61versión, 61
Mmapa de usuario
direcciones, 30, 60valores, 30, 60
mínimo-tiempo de espera, 46motor
modalidad de funcionamiento, 52tiempo sobrepasado de transición, 52tipo de sensor de temperatura, 52umbral de advertencia de sensor de temperatura, 52umbral de fallo de sensor de temperatura, 52
DOCA0130ES-01 07/2018
Índice
motor-bloqueo de transición, 47clase de disparo, 54comando de baja velocidad, 59corriente del último arranque, 50duración del último arranque, 50en arranque, 47en marcha, 47estrella-triángulo, 54fases, 54número de arranques por hora, 50número de fallos de sensor de temperatura, 41potencia nominal, 53refrigeración por ventilador auxiliar, 54relación de corriente a plena carga (FLC1), 57relación de corriente a plena carga y alta velocidad (FLC2), 57relación de corriente media, 47secuencia de fases, 54tensión nominal, 53tiempo de reinicio indeterminado, 47tiempo sobrepasado de paso 1 a 2, 56umbral de paso 1 a 2, 56velocidad, 47
motor-número de arranques, 40motor-relación de corriente a plena carga
n-0, 41n-1, 42n-2, 42n-3, 43n-4, 43
motor-sensor de temperatura, 50n-0, 41n-1, 42n-2, 42n-3, 43n-4, 44
Nnivel de capacidad térmica, 49
n-0, 41n-1, 42n-2, 42n-3, 43n-4, 43
número de arranquesmotor L01, 40
número de arranques motor L02, 40
Ppérdida de fase de corriente-
tiempo sobrepasado, 52pérdida de fase de tensión-
tiempo sobrepasado de fallo, 53potencia activa, 50
n-0, 41n-1, 42n-2, 43n-3, 43n-4, 44
potencia activa-consumo, 41
DOCA0130ES-01 07/2018
potencia excesiva-número de fallos, 41tiempo sobrepasado de fallo, 53umbral de advertencia, 53umbral de fallo, 53
potencia insuficiente-número de fallos, 41tiempo sobrepasado de fallo, 53umbral de advertencia, 53umbral de fallo, 53
potencia reactiva, 50potencia reactiva-
consumo, 41puerto de HMI-
ajuste de dirección, 54ajuste de velocidad de transmisión en baudios, 54ajuste endian, 54pérdida de comunicación, 47
puerto de redajuste , 24ajuste de paridad, 24ajuste de recuperación, 24, 57comunicación en curso, 50tiempo sobrepasado de pérdida de comunicacio-nes, 24velocidad de transmisión en baudios, 24
puerto de red-ajuste de dirección, 24, 58ajuste de paridad, 58ajuste de velocidad de transmisión en baudios, 58ajuste endian, 54código de compatibilidad, 39código de identificación, 39comprobación automática en curso, 50conectado, 50configuración incorrecta, 50detección automática en curso, 50número de fallos, 40número de fallos de configuración, 40paridad, 50pérdida de comunicación, 47supervisión, 50tiempo sobrepasado de pérdida de comunicacio-nes, 58velocidad de transmisión en baudios, 50versión de firmware, 39
Puerto HMIajuste de recuperación de puerto, 56
puerto interno-número de fallos, 40
Rrearme automático
ajuste intentos grupo 1, 56ajuste intentos grupo 2, 56ajuste intentos grupo 3, 56tiempo sobrepasado de grupo 1, 56tiempo sobrepasado de grupo 2, 56tiempo sobrepasado de grupo 3, 56
71

Índice
rearranque automáticonúmero con retardo, 41número inmediato, 41número manual, 41tiempo sobrepasado con retardo, 53tiempo sobrepasado inmediato, 53
rearranque automático-condición con retardo, 50condición inmediata, 50condición manual, 50registro de estado, 50
registrocontrol 1, 59control 2, 59
registro defallos 1, 46
registro de desequilibrio de fases, 51registros de uso general de las funciones lógicas, 62reinicio automático-
número de fallos, 40reinicio de fallo-
autorizado, 47reinicio automático activo, 47
relación de corrientetierra, 49
relación de corriente-L1, 49L2, 49L3, 49media, 49
Ssensor de temperatura del motor-
umbral de advertencia en grados, 52umbral de fallo en grados, 52
sistema-activado, 47advertencia, 47disparado, 47fallo, 47listo, 47
sobrecarga térmicamodo, 52
sobrecarga térmica-configuración, 52número de advertencias, 40número de fallos, 40tiempo sobrepasado definitivo de fallo, 52umbral de advertencia, 54umbral de reinicio tras fallo, 54
sobrecorriente-número de fallos, 41tiempo sobrepasado de fallo, 52umbral de advertencia, 52umbral de fallo, 52
sobretensión-número de fallos, 41tiempo sobrepasado de fallo, 53umbral de advertencia, 53umbral de fallo, 53
supervisión de lógica personalizadaregistro 1, 62sistema listo, 62
72
TTC de carga-
múltiples pasos, 55tensión
L1-L2, 50L2-L3, 50L3-L1, 50
tensión L1-L2n-0, 41n-1, 42n-2, 43n-3, 43n-4, 44
tensión L2-L3desequilibrio superior, 51n-0, 41n-1, 42n-2, 43n-3, 43n-4, 44
tensión L3-L1desequilibrio superior, 51n-0, 41n-1, 42n-2, 42n-3, 43n-4, 44
tensión median-0, 41n-1, 42n-2, 42n-3, 43n-4, 44
tensión-desequilibrio de fases, 50media, 50número de fallos de desequilibrio de fases, 41número de fallos de pérdida de fase, 41
tensión-desequilibrio de fasesn-0, 41n-1, 42n-2, 43n-3, 43n-4, 44
TeSys Tsistema de gestión de motores, 9
tiempo de funcionamiento, 40tiempo hasta el disparo, 50
Vvisualización de HMI-
activación de arranques por hora, 57activación de capacidad térmica restante, 57activación de consumo, 57activación de corriente de tierra, 57activación de corriente L1, 57activación de corriente L2, 57activación de corriente L3, 57activación de corriente media, 57activación de desequilibrio de fases de corriente,
DOCA0130ES-01 07/2018

Índice
57activación de desequilibrio de fases de tensión, 57activación de estado de E/S, 57activación de estado del motor, 57activación de factor de potencia, 57activación de fecha, 57activación de frecuencia, 57activación de históricos de arranque, 57activación de hora, 57activación de nivel de capacidad térmica, 57activación de potencia activa, 57activación de potencia reactiva, 57activación de relación de corriente L1, 57activación de relación de corriente L2, 57activación de relación de corriente L3, 57activación de relación de corriente media, 57activación de tensión L1-L2, 57activación de tensión L2-L3, 57activación de tensión L3-L1, 57activación de tensión media, 57activación de tiempo de funcionamiento, 57activación de tiempo hasta el disparo, 57ajuste de contraste, 55sensor de temperatura en grados CF, 57
visualización HMI-activación de sensor de temperatura del motor, 57ajuste de brillo, 55
DOCA0130ES-01 07/2018
73
Índice
74 DOCA0130ES-01 07/2018


Debido a la evolución de las normas y del material las características indicadas en los textos y las imágenes de este documento solo nos comprometen después de confirmación de lasmismas por parte de nuestros servicios.
DOCA0130ES-01
Schneider Electric Industries SAS35, rue Joseph MonierCS30323F - 92506 Rueil Malmaison Cedex
www.schneider-electric.com 07/2018