tesis previa a la obtenciÓn del titulo de...
TRANSCRIPT
TESIS PREVIA A LA OBTENCIÓN
DEL TITULO DE "INGENIERO ELÉCTRICO"
ESPECIALIZACION "POTENCIA"
DE LA ESCUELA POLITÉCNICA NACIONAL -
CALCULO Y DISECO DE UN MOTOR DE INDUCCIÓN
CON ROTOR JAULA DE ARDILLA
EDUARDO E. VALLEJO ALVARE2
QUITO DICIEMBRE ; 197?
CALCULO Y DISEÑO DE UiJ MOJ?OR DE INDUCCIÓN
CON JROTOR JAULA DE ARDILLA

Certifico que la presente tesis fue elabo-
rada por el Señor Eduardo Vallejo Aivarez,
bajo aii dirección
~7pxng. í'Iarco Contreras
DIRECTOR DE TESIS
V
•• a el continuo desarrollo de la producción; para
siiti.sf,-icer lac ir.mvterabJLes necesidades y exigencias de la
human i dad, des^/.^e a un papel importante los aparatos convertí
d o r e s d o e n <.! r;" í ?,, y e ni, r e e E t o s s e e n c u e n t r a n las .TI á q u i n a s
e Leo trl caí: rota ti va a, aquí tratare-nos a una de ellas: líl mo-
tor de inducción, con rotor jaula de ardilla.
ICste trabajo no pretende ser un tratado avanzado de
di se/i o, ni de exponer los fundamentos del motor; y más bien
es un intento por agrupar y obtener una secuencia de cálculo
que puede servir como modelo para el cálculo de otros motores.
i-]n el pr i m ¿ r c api t u 1 o de e ¿, t a Tesis se exponen al ¿u
ñas características esenciales del aotor a diseñarse.
* £n el secundo, tercero y cuarto capítulos, se indi-
can los pasos y procedimientos para la determinad 5n de los
par a.T; o c r o s y d o nías c ar ac c I'.L s x c as cíe .i_a ;íi¿io u ina; ai. i Ly.i a_L o u o
tablas, gráficas y recomendaciones para co/npletar el cálcalo.
El quln to capítulo tan sólo se hace una referencia
de fórmulas para la determinación de las pérdidas de la ;náqui-l
na. El sexto capitulo, consiste en el desarrollo del cálculo
numérico del motor con las especificaciones señaladas en el
capítulo I; siguiendo el procedimiento de los capítulos ante-
riores. Termina este trabajo; indicando curvas de funciona:nien.
to del :notor y un apéndice que constan la -Hoja de diseño delg
"otor de Inducción- en ia misma se encuentra agrupados los cál-
c-los del diseño.
Finalmente, mis :nás sinceros agradeciíaien tos a todos
quienes han hecho posible la realización de esta Tesis,
Edw ardo Val1e j o Alva r e z
Diciembre, 1977

V
1 . 1 Generalidades 1
1.2 Potencia 1
1 .3 '/oítaje ' 1
1 ./i Velocidad / 2
II
2, General ¿i-
2.1 Cor r ien te de r e d / - . L
2.2 Dl rVTia t ro y longi cud del inducidor G
2.2.1 ,';ú"¡ero de polos ' 6
2.2.2 Diámetro del inducido / 6
2.2.3 Longitud del inducido / 6
2.3 Flujo raagné-tico y factor de bobinado ' 12
2.3.1 Paso polar / • 13
2.3-2 Factor de bobinado 13
2./i Determinac ion de ranuras j conduc tores enioí estator /' ! 17
2.4.1 Número de ranuras del estator • 17
2.¿f .2 Número total de conduc tores ' 17
2. .3 Sle lentos de la bobina "- l 18
2.5 Devanado del estator 19
2.5-1 Clase y disposición del devanado 19
2.5-2 Sección transversal del conduc tor 21
3.1 Entrehierro -/ 25

VII
Página
3.2 Forma de ranura del estator 25
3.2.. 1 Aislamiento de la ranura del estator/ 26
3.2.2 Dimensiones de la ranura estatórica/ 28
3.3 Ranuras del rotor jaula / • 30
3.3*1 Barras y anillos de la jaula / 33
3.3.2 Forma-de ranura del rotor / 37
3-4 Fuerza -nagnetomotriz (FMM) en el entrehierro / ¿i-2
3.¿!*1 Factor de cárter y factor de forma/ ¿f2
3.5 Fuerza magnetomotriz de los dientes/ ¿fA-
3^6 Fuerza magnetomotriz en los yugos/ ' 46
3.7 Fuerza magnetomotriz total y corrección de
• v valores / ¿f7
IV CIRCUITO EQUIVALENTE Y CONSTRUCCIÓN DEL
LUGAR GEOMÉTRICO
¿f.l Circuito equivalente y parámetros tf ¿¡.9
¿f.2 Reactancias y permeancias del estator / 50
¿i-,3 Reactancias y permeancias del rotor / 55
¿l-*¿[ Construcción, del lugar geométrico / 55
V CALCULO DE PERDIDAS DE LA MAQUINA
5. General / 65
5.1 Pérdidas en el estator• ' • ' 65
5.2 Pérdidas en el rotor ' 67
5.3 Pérdidas por efecto de pulsación / 68
5c¿i- Pérdidas adicionales y rozamiento/ 70
5-5 Pérdidas debido a la corriente/ 71
5.6 Rendimiento/ 71
VI EJEMPLO DE APLICACIÓN
6.1 Desarrollo . 72

VIII
Páginas _
6.1.1 Cálculo correspondiente al Capítulo II 72
6*1*2 Cálculo correspondiente al Capítulo III 75
6.1-3 Cálculo correspondiente al Capítulo IV 85
6.1.¿f Cálculo correspondiente al Capítulo V 89
6.1.5 Construcción del lu^ar geométrico 95
6.2 Conclusiones ' 98
APÉNDICE I
Hoja de diseño 1 o¿f
Conjunto del Motor .-Lámina 1-1 108
ÍNDICE DE REFERENCIAS 109
BIBLIOGRAFÍA. - 110

IX
I.ÍDICJS DE FIGUHAS
Página
2.1 DiA.;íocro interior del estator de los motores
asincrónicos 7
2.2 Densidad de ¿ner¿ia de motores asincrónicos 8
2.3 Sección transversal clel estator 9
20¿f Curvas típicas de inducción normal 10
2.5 Inducción media y Densidad de Corriente 1 L\.
2.6 Fuerza electromotriz inducidas en un bobina-
do distribuido 16
2.7 Desarrollo del bobinado imoricado fracciona-
rio de doble capa, para una Tase 20
2*8 Número de grupos de bobinas en paralelo 21
3.1 Forma y dimensiones de la ranura del estator 29
3.2 Anillos del rotor 35
3*3 Obtención de corriente rotórica 39
3*¿f Aumento de la resistencia debido al efecto
pelicular para una sola barra maciza por ,
ranura t ¿il
3.5 Forma y dimensiones de ranura del rotor ¿fl
3.6 Determinación del factor de Cárter ¿¿3
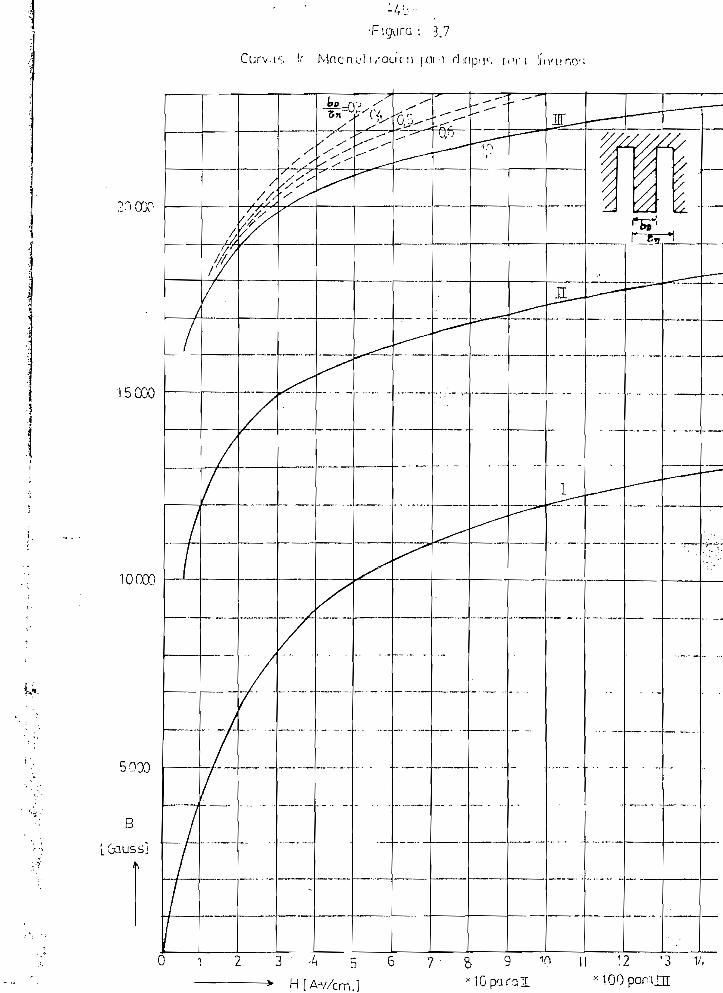
3-7 Curvas de magnetización para chapas para
dínamos ¿f5
3.8 Determinación del factor Ky (FMM en el yugo) ¿j.8
3«9 Fac bor de forma de la curva de campo ¿f8
¿1.1 . Circuito equivalente del motor de inducción ¿f9
¿t, 2 Circuito equivalente simplificado del motor
de inducción 50
k-*J> Camino del flujo de dispersión del motor de
inducción 52
¿i.¿l. Factores de corrección Kc y Ka para la per-
meancia de ranura 5¿j.
¿¡..5 Disminución de la inductancia debido al
efecto pelicular en los conductores de las
ranuras ' co

Página
¿I-.6 Diagrama de £ y Y del circuito principal 59
¿f.7 Dia.gra.-na circular de corrientes 61
4.8 Repreccncación de características sobre
el diagrama circular 63
6rl Determinación de ia corriente rotórica 80
6.2 Diagrama•del circulo del motor de inducción
de diseno 101
6«3 Curvas de Torque y corriente del motor
de diseño . 103
6.4 Curvas de factor de potencia y rendimiento
del motor de diseño 103
•Ste

XI
n DICE DE TABLAS
Página
1.1 Influencia de la altura sobre la disminución
de la potencia
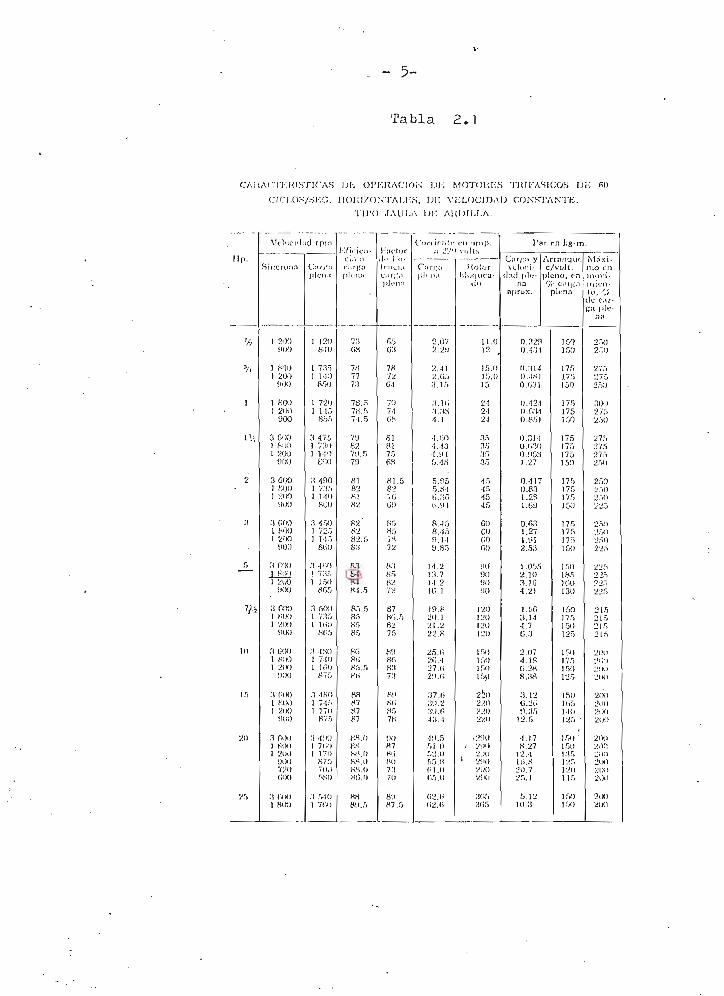
^ 2.1 Característica de operación de motores trifá
sicos ' 5
2.2 Galgas para chapas de hierro y acero 11
2.3 Pérdidas en V//Kg de las chapas eléctricas 12
2c4 Alambre de cobre, redondo-desnudo y aislado 23
3-1 Límites de elevación de temperatura 28
3-2 Ranuras recomendables para estatores y roto-
res de los motores asincrónicos de corto
^ circuito 32¡f*'
3.3 Resistividad y conductividad del cobre y
aluminio a 20 CC 34
3.4 Torque a rotor bloqueado,, motor jaula 37
3«-5 Corriente a rotor bloqueado, motor jaula
a 220 V 38
4.1 Factor de dispersión doblemente concatenado 53t -4*2 Valores del factor de dispersión doblemente
concatenado para rotor tipo jaula 56
5.1 Factor Ky en función del número de polos 66
5-2 Factor Ú"w;en función de espesor y pérdidas
^ de la chapa 69
3,3 Factor de rozamiento 70
6.1 Valores para graficar el diagrama del círculo 100
6-2 'Porque y corriente en función de deslizamiento 102
6.3 Factor de potencia y rendimiento . 102
C A P I I U L O I
D¿L MOTOR A DISEÑARSE
1•1 •- Genora1idaües
Para el siseño de este motor, se han elegido caracte-
rísticas qi'.e requieren cierto tipo de máquinas en la industria,
y que por el trabajo desarrollado; su fácil instalación y mant_en
nimiento,. b.jén rendimiento y costo, hacen que el motor de inducción
con rotor jaula, tenga mayor demanda en el mercado» A continua-*
ción señalaremos algunas características.
1.2«~ Potencia
Se ha fijado una potencia de 5HP; que es un número de
HP enteros y normalizados (NEMA: National Electrical Manufacturers)
Este tipo de motores pequeños,, son más solicitados y
en caso de que se llegara a una posible construcción, ésta sea
fácil, así como para realizar pruebas de medición, comprobación
y eficiencia.
La altura donde se coloca el motor, influye sobre la
potencia del mismo (Manual A,E»G«), ya que a grandes alturas la
evacuación del calor de la máquina disminuye, por ser menor la
densidad del aire. Esta limitación es válida, en principio a
partir de los 1.000 metros sobre el nivel del mar. La potencia
de la máquina ha de reducirse según datos especificados en la t_a
bla 1.1
1.3.- Voltaje
Se ha elegido 220 voltios, que es un voltaje normaliza
do para motores de corriente alterna polifásicos, según ASA;
American Standards Association y sabiendo que en nuestro país se
tiene normalizado el sistema de distribución en la red secunda-
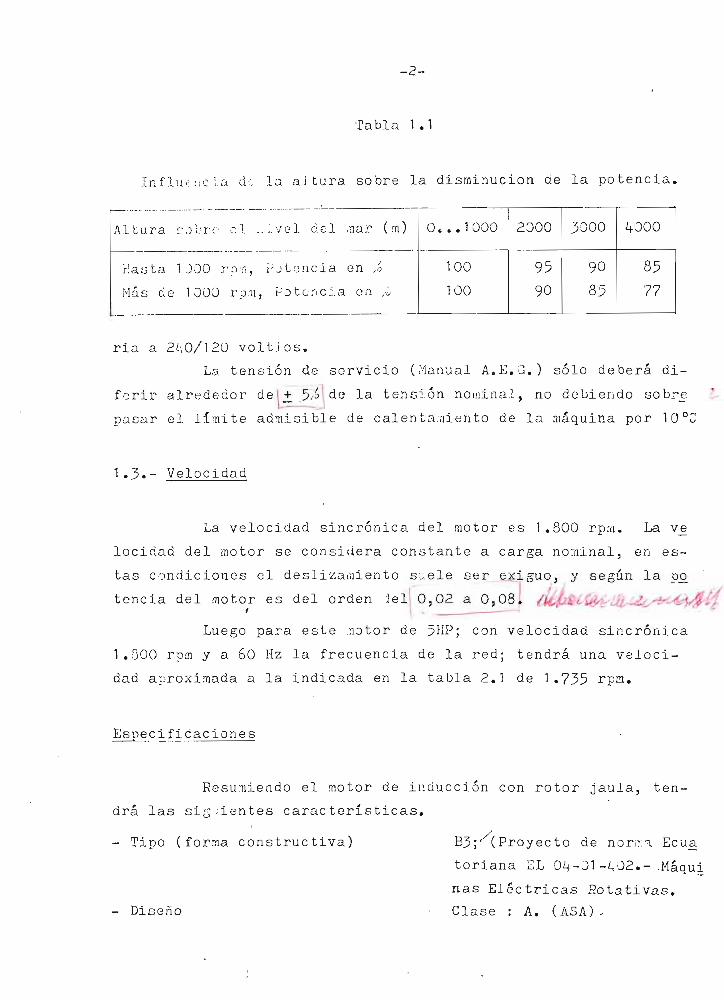
Tabla 1.1
O *..1000
100
100
D 2000
95
90
3000
90
35
4000
35
77
ría a 2^0/120 voltios.
La tensión do servicio (Manual A. E. -a, ) sólo deberá di-
f-jrir alrededor dej_+ 5/í>'de la tensión nominal, no debiendo sobre
pasar el limite admisible de calentamiento de la máquina por 10 °C
1 . '5.- Velocidad
La velocidad sincrónica del motor es 1 . 800 rpm. La ve
locidad del ¡notor se considera constante a carga no/nina!, en es-
tas condiciones el deslizamiento suele ser exiguo, y según la op
toncia del motor es del orden leí 0,02 a 0,03. ¿léfáífa^ ¡J¿*¿^^¿
Luego para este .r¡otor de pHP; con velocidad sincrónica
1.300 rom y a 60 Hz la frecuencia de la red; tendrá una veloci-
dad aproximada a la indicada en la tabla 2.1 de 1.735 rpm.
Especificac iones
Resumiendo el motor de inducción con rotor jaula, ten-
drá las simientes características.
- Tipo (for:na constructiva) B3;//( Proyec to de nor:r-a Ecua
toriana SL 0-4-01 -V02»- .Máqui
ñas Eléctricas Rotativas.
- Diseño • Clase : A. (ASA)-
-3-
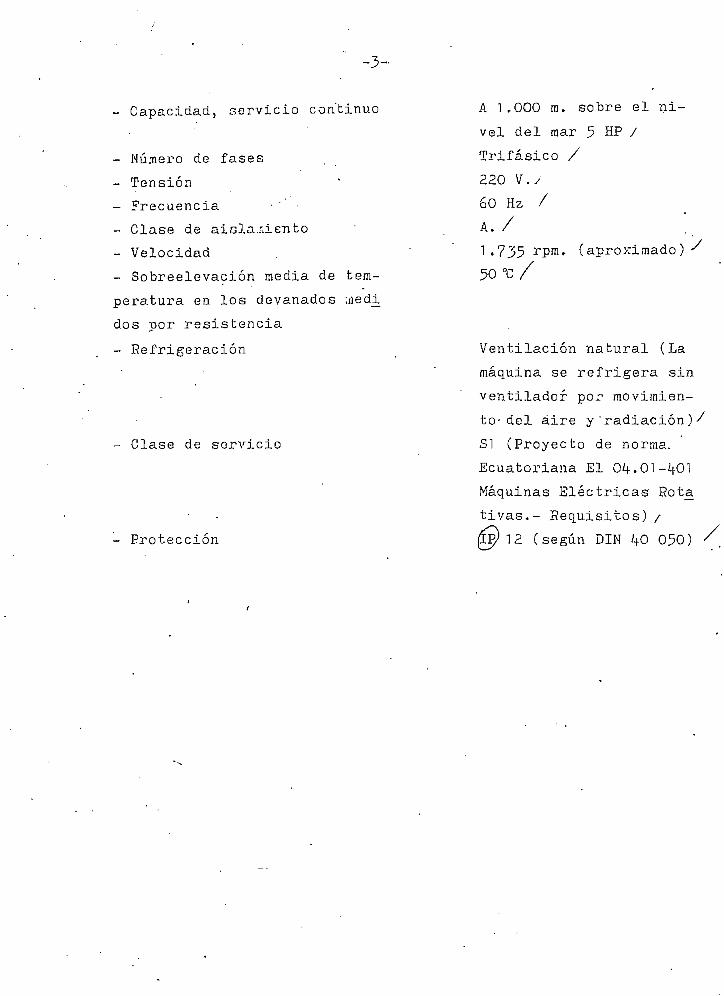
- Capacidad, servicio continuo
- Número de fases
- Tensión
- Frecuencia ; '
- Clase de aiGla.r.iento
- Velocidad
- Sobreelevacion media de tem-
peratura en los devanados laedi
dos por resistencia
- Refrigeración
- Clase de servicio
A 1,000 m. sobre el ni-
vel del mar 5 HP /
Trifásico /
H20 V./
60 Hz /
A./
1 .735 rpnu (aproximado) '
Protección
Ventilación natural (La
máquina se refrigera sin
ventilador por movimien-
to- del aire y'radiación)
SI (Proyecto de norma.
Ecuatoriana El 0¿f.01~¿¡-0l
Máquinas Eléctricas Rota
tivas.- Requisitos) /
(f9l2 (según DIN IfO 0 0)
G A P I L1 U L O II
En este capí Lulo .so o e terminan las dimensiones físicas
las mismas que fijarán el tacaño ao la máquina, adelas ciertos
detalles en el estator, como e L bobinado y el flujo de la máqui-
na.
2.1.- Corriente de red
La corriente absorvida por el motor en su funcioria¡;iien
to dependerá de sus caracterís ticas, para ello necesitarnos ore-
viamente calcular la potencia aparente de la máquina:
Pw
Ps= poCencía aparente en KVA
Pw= potencia real en KW
v£ ~ rendimiento
coscp = factor de potencia de la máquina
La eficiencia y factor de potencia a plena carga lo
la tabla 2.1
Luego:
IT = Corriente de línea de la red en Amoerios (A)Ll
UT = Voltaje linea-llnea de la red en voltios (V)
— 5
Tabla
CAiíACrKKIHTK'AS Uh OI 'KRACIOK l.iK MOTOKKS T1UFÁSICOS I)¡0 fi()
CfCI-OS/SKC, i!Oi;;/ONTA¡,l 'S, UK Y J O L ü C I I > A l ) CONS'f'AXTK.Tirt) . íAUí .A I f K AUDILI-A.
-6-
2.2.1.- üúmoro de polos.
El nú-ñero de polos de un motor está fijado por la velo
c i d a d y f r e c;; o n c i a a la que opera éste:
(2.3)Ss
P:- Mu m e r o par de polos
f= Frecuencia de la red en ciclos por secundo (Hz)
Ns- Velocidad sincrónica del motor en rpm
2.2.2.- Diámetro del' inducido', '\j,,- ¿lew] •
De la figura 2* 1 que expresa,, el di a ¡nebro interno del
estator en función de la po Leneia de la máquina, teniendo coiao
para "io tro el nií 'ñero de pol o s , nú e da de t ernn nado e 1 diámetro i n-
temo del estator: Di
2.2.3 Longitud del inducido
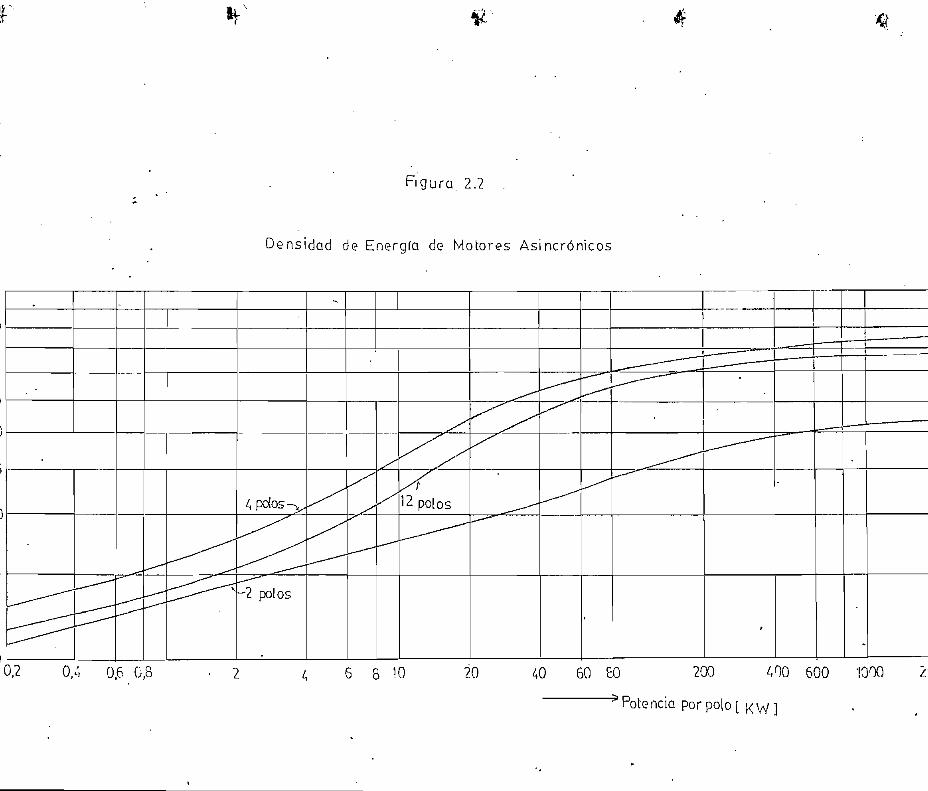
Para el.calculo de la longitud axial, del núcleo del
estator, previamente se determina la densidad de la energía de
la máquina, valor que se obtiene de la fig. 2.2; ésta expresa la
densidad de energía v;-;rsus potencia por polo.;
La densidad de energía se exoreaa así:
C pw
Di , Li.¿>¿
C= densidad de energía en KV/- :nin/m
Di- diámetro del inducido en :n.
Li= longitud del inducio en ..

V
Fig
ura
. 2
.2
De
nsi
da
d de
Ene
rgía
de
M
oto
res
Asi
ncr
ón
ico
s
0,4
0,6
0,8
A 6
8 10
40
60
£0
200
400
600
1000
^ P
oten
cia
por
polo
[

a.~ Canales de Ventilación,
Cuando la longitud del núcleo (1) del estator es ma-
yor que los 10 6 1235 cm. deberá dividirse en secciones, median-
te ductos radiales de ventilación para asegurar el enfriamiento
del núcleo y devanados. Los ductos de ventilación son de 10 mm.
de ancho para máquinas de tamaño moderado y de 13 rara, para máqui.
ñas grandeso • •
La distancia entre centros de ductos no deberá ser ma-
yor que 7,5 c.iu Se logra generalmente un ducto de ventilación a
cada extremo del estator por medio del soporte para los dientes.
a vi-11*~
av2
Ul De
La
Fig. 2.3Sección transversal del estator
La fig«. 2o indica los canales de ventilación avl . av2;
los diámetros in.ternos y externos del estator (Di y De) y la lon>
gitud total del inducido, Laj vale;
La = IH- (2.5)
Donde:
L= longitud de los paquetes enchapados del núcleo
Como.en nuestro diseño se trata de una máquina de po-
tencia pequeña, de lo expuesto anteriormente no es necesario usar
canales de ventilación, entonces;
-10-
Li = La = L
b.~ suelto y aií-:l alentó.
La construcción del núcleo del estator, del ,iotor de
induce lo:.' (¿) es la ..-is:na que para ar.maduras de máquinas sincró-
nicas, l;ara maquinas pequeras se usa frecuentemente el mismo e_s
tator, va sea nara ..-¡áquiria sincrónica o motor de inducción.f -j j.
Las laminaciones del estator se troquelan a partir de
acero eléctrico con 1 a 3/¿ de silicio* Los requisitos (3) prln
cipal^s son: alta permeabilidad, baja histeresis y alta resisti-
vidad. Mediante una conveniente conblnación de laminado en frió
y tratamiento ter.alco, se elaboran materiales en los que confie-
re una orientación definida a los ejes de los cristales. Esos
materiales cuando se hallan magnetizados en la dirección prefe-
rencial poseen propiedades considerablemente superiores a los de
los tipos ordinarios.
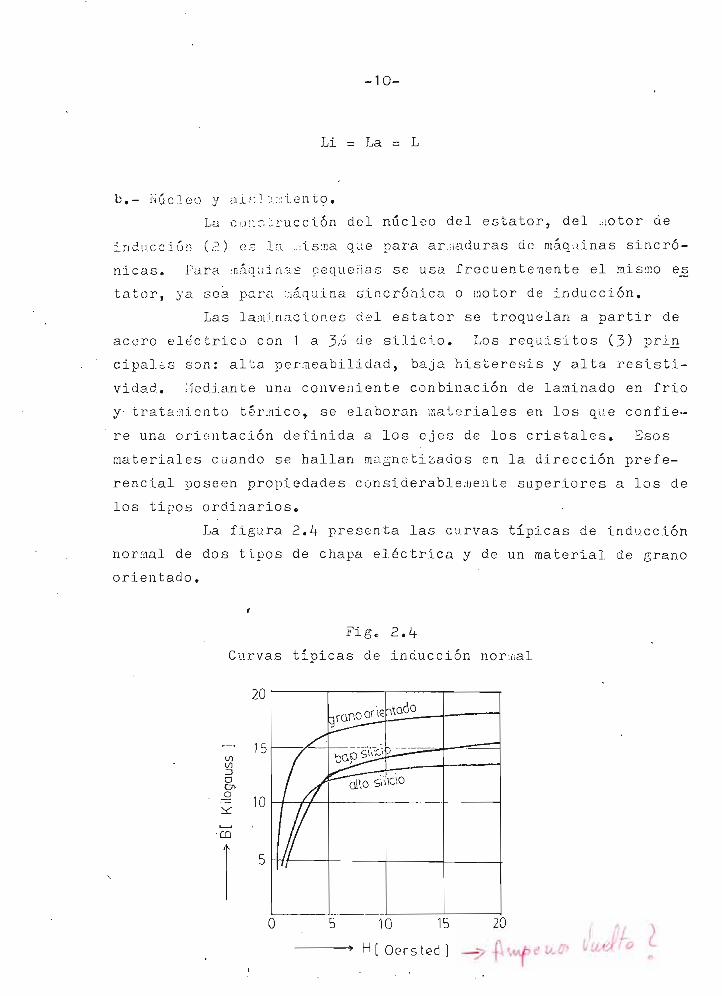
La figura 2.4 presenta las curvas típicas de inducción
normal de dos tipos de chapa eléctrica y de un material de grano
orientado.
Fig. 2.4
Curvas tínicas de inducción norial
LOLO13O
•m
H[ O e r s t e d ] -^-f\f e tú
.11
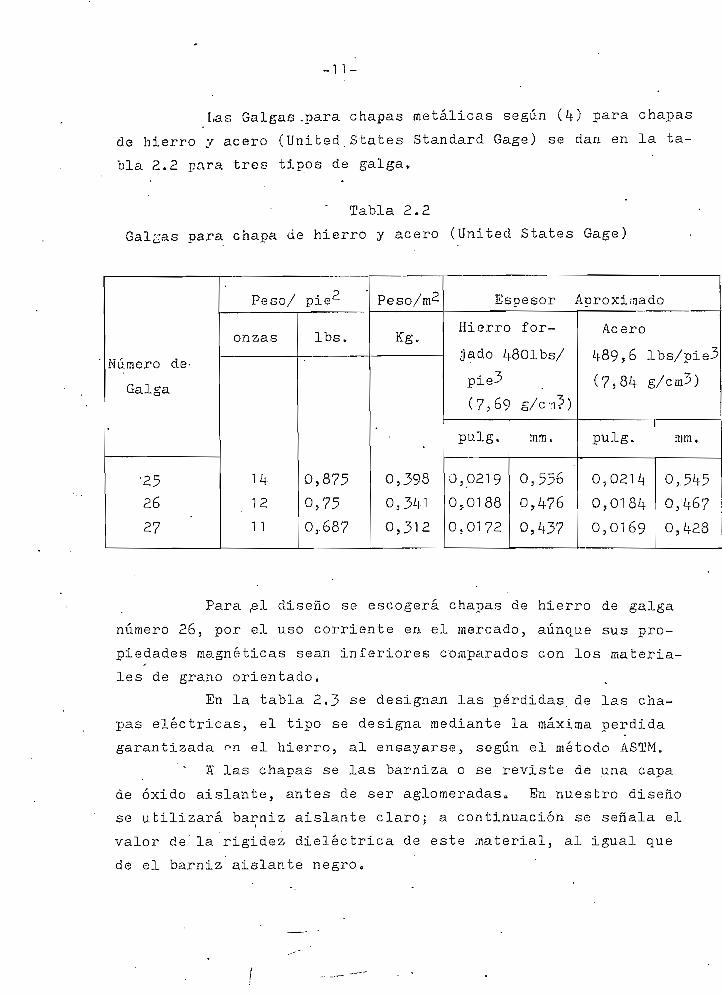
[,as Galgas-para chapas metálicas según (4) para chapas
de hierro y acero (United.States Standard Gage) se dan en la ta-
bla 2.2 para, tres tipos de galga»
" Tabla 2.2
Galeas para chapa de hierro y acero (United States Gage)
Número de-
Galga
°
•2526
27
Peso/ pie¿
onzas
1412
1 1
Ibs.
0,875
0,75
0,687
Peso/m^
Kg.
0,398
0,341
0,312
Espesor Aproximado
Hierro for-
jado 4801bs/
pie?
(7,69 £/c-;i?)
pulg.
0,0219
0?0188
0,0172
mm.
0,556
0,476
0,437
Acero
489,6 Ibs/pie3
(7,84 g/cm3)
pulg.
0,0214
030184
0,0169
mm.
0,5450,467
°'«8
Para ,el diseño se escogerá chapas de hierro de galga
número 26, por el uso corriente en el mercado, aunque sus pro-
piedades magnéticas sean inferiores comparados con los materia->les de grano orientado.
En la tabla 2.3 se designan las pérdidas, de las cha-
pas eléctricas, el tipo se designa mediante la máxima perdida
garantizada on el hierro, al ensayarse, según el método ASTM.
fí las chapas se las barniza o se reviste de una capa
de óxido aislante, antes de ser aglomeradas» En nuestro diseño
se utilizará barniz aislante claro; a continuación se señala el
valor de"la rigidez dieléctrica de este material, al igual que
de el barniz aislante negro.

-12-
GE. tí- 3-'¡-35ríe,r:ro
Ba r n i z aislante
1.790-2.100
'Tabla 2,3
Pérdidas en vatios por kilo¿'rar.o de las chapas eléctricas,
Indi
Tipo
1,171,171 ,17
Galga
27
26
25
5000
0, 36
0,9¿f1,0/,-
7000
Ví3l , 55
1,73
1 0000
2,67
2,33
3,16
1 1 000
3, 173,36
3,76
12000
3»7¿*4,03
k>k&
13000¿1 . Li P
4 * O 2
5,38
1 /j 000
5,20
5,63
6,27
1 5000
6 , 06
6559
7,32
Para máquinas pequeñas los troquelados se hacen de una
sola pieza, y se ajustan sobre la flecha, ¡el apriete de las pla-
cas se e f ec tua con cu fias.
f
2.3»- j.'lujo magnético y factor de bobinado.
La distribución del flujo magnético se supone general-
Tiente una sinusoide, si considerados sólo la fundamental sin to-
mar en cuenta los armónicos; ya que en un devanado distribuido
y de paso acortado, produce una onda de flujo en el entrehierro
de forma anroxl.-iada .ionte senoidal.

-13-
2.3.1-- -Paso polar,
• Es el ángulo formado entre los ejes de polos adyacen-
tes; se lo puede expresar*también como la longitud del arco de
aquel ángulo, así:
(cm.) U. 6): 2p
Di en era.
De la fig. 2-«,5 que nos relaciona,, inducción magnética
expresada en (Teslas) y densidad de corriente en (A/mmf), en fun
ción del paso polar, se determina la densidad del flujo medio en
^ . el entrehierro ( B£ ')
Entonces el flujo medio por polo en Weber.
= B&. Sp . Li (V/b) (2.7)
2*3«2.~ Factor de.bobinado -
a) Factor de acortamiento, ( fa )
Con el objeto de mejorar la forma de onda de 3.a ten-
sión inducida ó de la fuerza electromotriz (fem) creada, los de_
vanados están formados por bobinas con un ancho inferior al paso
polar (bobinas de paso acortado) / -íEl efecto de este acortamiento es limitar el flujo-
concatenado con la bobina, en relación a la de paso diametral.
La principal ventaja consiste en la posibilidad de eliminar de-
terminados armónicos de la onda de fem. y al mismo tiempo redu-
cir la longitud de las cabezas de bobinas*
Se lo define como la relación entre la fem. inducida
en una bobina de paso acortado y la inducida en una bobina de
paso diametral, ó se determina así.

it '
F:ig
ura
: 2.
5
< In
ducc
ión
Med
ia
y D
ensi
dad
de
Cor
rien
te
50
-15-
| v. f_-_ - ,, .-.o / —i i~\ £1 TI _ I * j L) I r * í /
2 Sp
En donde: 6^
5 r;, ;.) a r. o p o 1 a r ( E:,S n r a n u r a ü)
V/a, ancho cié bobina relativo acortado (en ranuras)
yv (en. ranuras)
Para utilizar la totalidad de la .superficie activa
del entrehierro, los devanados industriales se componen de va-
rias bobinas por fase dintri buidas conven Lenbebente en ranuras
equidistantes.
A pesar de que la fe;.i. para el mismo número de espi-
ras es menor que con el devanado concentrado de paso diametral
(una ranura por polo y fase) sin embargo los armónicos son redu-
cidos en una apreciable cuan bia y mejor aprovechamiento del hie-
rro del circuito magnético de la máquina.
Este factor se exprosa corno la relación del área bajo
la curva de distribución del flujo, al área del rectángulo que
tenga igual base y ordenada máxima•
Sste factor en función de voltaje inducido se lo expresa, (5)
(ver Fig. 2.6) ; í
f e:n. resultante
2. fera. inducida en cada bobina
Er - f e nú resultante ( AE)
Ec = valor máximo de fera. inducido en una bobina
( A3, BC , . c » )
q = número de ranuras por polo y por fase
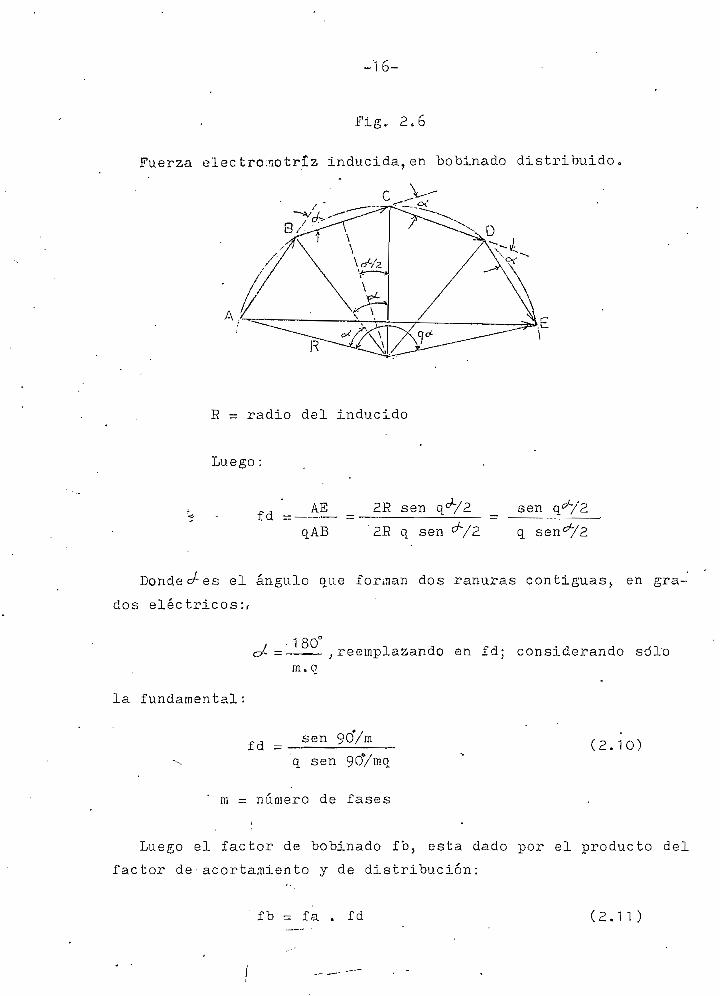
. Fig, 2.6
Fuerza electromotriz inducida,en bobinado distribuido,
R
R = radio del inducido
Luego;
fd =• AE 2R sen
qAB '2R q sen
en
q
Dondec/es el ángulo que forjan dos ranuras contiguas» en gra-
dos eléctricos:f
•1_80_°
nú q; reemplazando en fd;, considerando sdl'o
la fundamental:
fd = sen 90/m
q sen 90°/mq(2.10)
m - número de fases
i
Luego el factor de bobinado fb, esta dado por el producto del
factor de•acortamiento y de distribución:
fb = fa . fd (2.11)
-17-
£1 númoro de ranuras del estator deberá escogerse para
lograr los requerimientos del número de polos y fases. Las ranu.
r a s d e 1 e e t a i o r y r o t o r ce o e r • á n tener t a les p r o p o r c i o n e s q •. i e se
}o£reri variaciones mínimas en la reluctancia del entrehierro, cu
yas variad mes resultan cuando las ranuras del rotor se mueven
frente a las del estator,, estas variaci jnes en la reluctancia
del entrehierro, originan pulsaciones en el flujo del mismo, lo
cual produce pérdidas adicionales en el núcleo así como ruido.
Tales efectos podrán conservarse en valor pequeño, al
usar gran número de ranuras angostas, pero el costo de manufactu
ra se hace alto debido a que hay más bobinas que devanar, aislar
y colocar en las ranuras.
En general el número de ranuras por polo y por fase
del estator (ql) aceptable varia de: 3 a 5; luego el número de
ranuras del estator es:
NI = m « 2p. ql (2.12)
Donde:
NI = número de ranuras en el estator
2 . /i. 2. - N ú :q e r o total de conductores
Al aplicar un voltaje a la máquina rotativa y conside-
rándolo completamente sinusoidal (sólo la fundamental), se ori¿i_
na en los bobinados, flujos también sinusoidales de la forma;
eos Y; t (2.15)
En donde0(t); flujo por polo en función del tiempo,
(£>, es el flujo de valor máximo y w, es la frep-ar^ncia angular
del voltaje aplicado y es igual a: w = 2-rff,. donde f, frecuencia
de la onda sinusoidal del voltaje en Ha.
Para .7, , espiras en serie por fase se tiene el voltaje
máxl.no inu.ieido por fase..
'II " (2.1¿f)
Reemplazando (2.13) en (2.1/f) y derivando
u- = w V/1 (u sen \
Cuyo valor máximo:
u- , = w \v'Imax, 1
Y su valor eficaz es;
1 ifTT
Para un devanado fraccionario, y considerando .la dis-
tribución del flujo en el entrehierro, este voltaje sufre un de-
«rreraento en un factor, que es el factor de bobinado y además21
\ ' = — ¡ donde 7¡, número de conductores por fase, entonces (2.15)1 Z
expresada en voltios:
-. f . . fb1 — L (v)
U1 = 2,22 f .(|.fb1.Z1 (V) (2.16)
26¿f.3«- Elementos de la bobina
El número de conductores totales por fase CZ-j), viene
dado por (2,16) — -
• Se escoge el devanado imbricado de doble capa por lo
que el número de grupos de bobinas 6' "secciones de devanado" se-
rá igual, al nú-ñero de polps; el desarrollo de este devanado para
una fase se indica en la Fig» 2*7
. Luego se .determina los conductores por ranura
Z - = . Z] . .ai (2.17)n ,T / -,. Ni/3
Donde, a-¡= número de grupos de bobinas en paralelo,
eme se utiliza en caso de ser necesario el aumento de los conduc
tores físicos por ranura; ya que Zn-j en un devanado de doble ca-
pa, tiene que ser entero y par,
El número de espiras por bobina es' e
W-jb =1 Znl ' (2.18)
2.5»- Devanado del estator
Los devanados- que se usan para el estator ó ca.npo de
los motores de inducción, son los mismos que- los devanados de
armadura para máquinas sincrónicas,, Se usan devanados con.cen.tri.
eos, pero tales devanados han sido reemplazados generalmente por
los devanados de doble capa, debido al ahorro en costo de fabri-
cación. Este devanado produce el campo magnético.da' la máquina,
í 'í
2*5.»1*- Clase y disposición del devanado
Este motor trifásico de inducción, de ¿f polos con. 36
ranuras en el estator; el devanado primario se compone de 36 bo-
binas idénticas, cada una de las cuales abarca 7 dientes,o sea 2
menos de los 9 dientes que hay en el paso polar ( acortamiento
igual a 2). Por esta razón se llama devanado de paso 7/9- ,Por

Fig
uro
: 2
.7
Des
arro
llo d
el P
obin
ado
Imbric
ado
Fra
crio
nario
de
Dob
le C
üp
a,p
ara
una
Fas
e
I I
I
I
'
oo
oo
oo
ob
bo
oo
oo
oo
bb
bo
oo
oo
o-
bb
oó
óo
oo
ob
\ 3
A
5
6
7
8
9
-10
11 1
2 13
14
15
¡6
17
IB
19
20
21
22
23 2
4 25
26
27
2B
29
30
31 3
2 33
34
35i
!
tapa
inf
erio
r'c
apa
supe
rior
-ai
ejemplo, Si hay 3 ranuras primarias por polo y fase,, la fase A
constará de cuatro "secciones de devanado" igualmente espacia-
das y compuestas cada una, de tres bobinas consecutivas conecta-
das en serie* Debido al paso acortado, los lados; superior e
inferior de las bobinas de .cada fase, cubren la fase siguiente
en cada extremo.
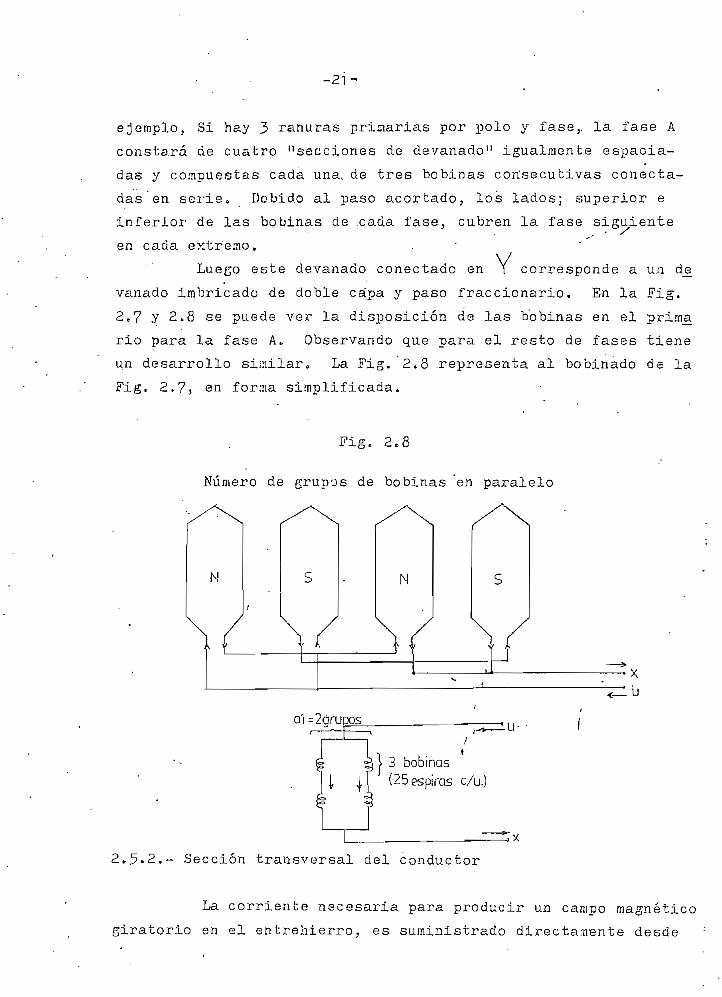
Luego este devanado conectado en Y corresponde a un de
vanado imbricado de doble capa y paso fraccionario. En la Fig.
2,7 y 2.8 se puede ver la disposición de las bobinas en el prima
rio para la fase A. Observando que para el resto de fases tiene
un desarrollo similar» La Fig.'2.3 .representa al bobinado de la
Fige 2.7j en forma simplificada.
Fig. 2*8
Número de grupos de bobinas "en paralelo
N
<-^ u
al-2qrupos
3 bobinas(25 espiras c/u.)
2.5.2.- Sección transversal del conductor
La corriente necesaria para producir un campo magnético
giratorio en el entrehierro, es suministrado directamente desde
la red.
De la Flg. 2»5 se dotcr.nina la densidad de corriente?..
G. (A/mm ) , según el tipo de conexión se calcula la corriente por
fase T], en el bobinado, entonces la sección de cobre total por
fase en el estator viene dada:
A1T *—G
La sección transversal del conductor
Aic =:_-!L-~ (mm2) (2.20)
a1 = Número de grupos de bobinas en paralelo
Las pérdidas en el cobre en cualquier devanado varían
directa.nente con G^, luego la densidad de corriente en el esta-
tor deberá escoge;11 se de tal ¡¡¡o do que pueda lograrse una eficien-
cia satisfactoria, sin elevación excesiva de la temperatura. Pa
ra los devanados de motores normales de inducción, con construc-
ción de tipo abierto, las densidades de 3*J a 593 ( A/mm2) seránj
.generalmente satisfactorias. .
Se usará conductor de cobre, redondo es/faltado con ca-
pa normal de acetal polivinilo del calibre requerido, (6) y nor-/
malizado, ver tabla 2.3 . *
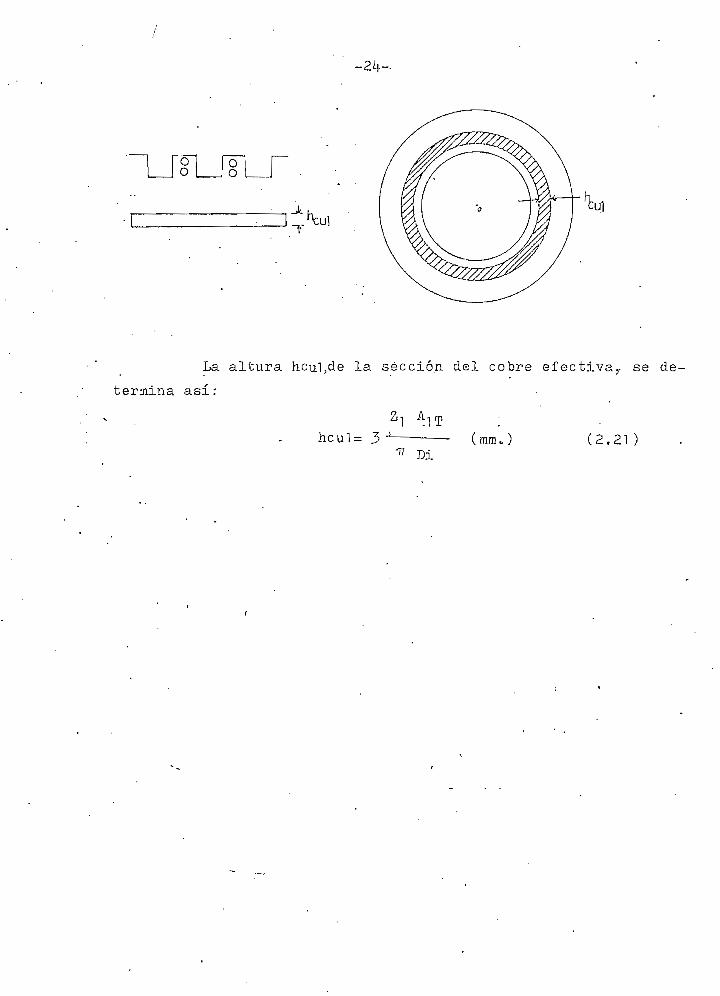
Sección de cobre efectiva
Se trata de encontrar la altura de una lámina de co-
bre que estarla alrededor del núcleo equivalente a la sección
total de cobre del bobinado es tatorico, como se indica en el
gráfico si.;juien be.

*t:H
r"
Tab
la
23
AL
AM
BR
E
DE
C
OB
RE
. R
ED
ON
DO
—
D
ES
NU
DO
Y
A
ISL
AD
O
Colibrí
y;
a-.
:n 32 ..j
¿*,
2-\2
Jl
20 in IX M 12 11 10 •J a u •i j 0
•i/u
Uir
fme
tro
mm
H.1
27U
íJ.M
'j/i
U.lT
.-h
»!!',']'.
'11
22»
irt
OÍ'!!
U ;_
•;>,
¡i fí
y?U ídtli
II S
7.T
(
tl.V
-'it
(I.^
IIrt
y.i'ii
u
i j.'
yji í'i
ix'^
j1 .i
2S
2.H
VI
a.i;iM
4,t:¡
M.1
.1 h
-(
Í:Í
IIÍG
8-!
^"í
muí
0.2
2H
1O
jM'lt
o!.V
l7.1
U 3
:;ifj
ii..-.>-l
- 1J.
.¡.,-
t.H11 M
vi
1? .V
JW
» i;¿
i'-j
U (E
*>.(
IJ.M
'),'
1) i'J-.-ií
l 1)
2! 1
l.M
.i1
.L--1
71
-!H
7
1.7
.!.',
2.1
IU
iiü s'-iíl)
y .ü
iJ
1 .872
To
rro
ilohlc
de
u: m
u.a
iwH
.IU'M
o.r
tvi
í!:H túsr.i
H...P
--»
IÚM
Üti
(i't.t.
1
1 ÜM
'ii
1:1.-)
i./i;
i.a
-jl.-
'.U líi
¿.r.2
72.W
.1
3.'i»
Ti
s l'J.O
Tl
Alo
mb
r»C
Ml1
tlIl.il)'!
oiiw
s
11.1 Irtil
(líl'-l
o.-íi
lx)
u -i
'i;ll.-
VJK
)
U.7
./.M
1} M
-1M
.1
I.'li'í
177
a!:iM
Alo
mbrí
*ro
n c
Nni
al-
tir í
qrn
i-
rum
OÍI7
Ü2
u.üm
"!:íw
«.'4
5172
i» r.c
i:.
¡1S
U.ÍH
M
!:Í
Üi'n
h
2ÍW
ÍÍ
;!:SS
.co
n c
imiii-
rnni
I/27ÍM
ii'ü 0..1M
UII ÍM
U
«iv
ivi
S?.
II..S
70.I
I.V»¡
7
!:Í
I/)ÍM
2,2
17
2.4
7I
•J.7
7Ü3.1
»
Aln
mltr
-:
íu y
(o
rto
non
0.:»
277
O.'íilíí
I'.-I-M
5
u'.'i-
m;
US
tl.V
f.IH
Il.'.L
-v )
I.H71'
1.J7
.-1
ríis
1.M
7
' I-7
l.1i
I.l"t)
•J. Idl
•1;
:i.c-
i.rí
AiW
(k
-1
co'trc
tl.O
K'iai
n 'I::
;I'M.
ll'lV
I(L
-t!l
ti 1
X.I2
30 «
»i»
if;11
1T
_'I
') !S
:-UJ
i)
U'L
'lU
WM
7o.a
wi
II X
Í'Jí
fl H
it;.
H..M
7Ü
(1
i'-T
.-f.t
t)..
f/'t¿
I.U
HH
l.'»
1"
I.IO
'I
2.-
MJ
2.H
iM
•L173
'I!
I'i.774
3:i.l
'.12
r.n..;77
U. '.4
1!'
lU7.a
M.ri
Ohir.s
iw
f cm
lrt
I(H
) tn
n 2.'»
' C
Itl't
fyj.'
i•f
!) 7
25!?
,
Jti lí
12.7
10
.1
H.lrt il 1
'VJ
l.'X
)ü.7
(«i)
m-'i
0.4
V2
»!:!
Í.iII.L
'Í-I
o! i.w
«.(?
;/:U
.dV
S
ti.ii¡
¿(L
OlfíJ
U.fW
.Vi
0.0
24
2n
.oin
i
u 7
.1' C
124 :«:
u71
'.., 1
r/i.2 u lí-.ii
lií.2
r¿. d ni :I!T«
-'.4
1
K4
S
i . r.
iI1
.ÍM
U0.7
2Í
Ü.f'N
S
n.-i'is
0 :i7
oO
ir'7
(j!Í!"i
11. 1
-1. •
H.M
7_
!í;ÍV
!.7;i
n. d
'Jí.y
U.O
IH;Í
IV"»
-n
ktr
[»ir i-aií.i l»
l m
Uo.'tiutlu
l)!»
Í4Í!i
lij'-'.V
ti
I'!t)7
1 >
7
Il'l4
i'l
n. i
MII
».l'.-l.r,
II. "^
M
¡Í.4
Í>»¡
!1. «r.'l'fi
1 lü
'l1.4
1,7
I..N
.'4)
:7!7
i«4
«77
Ü!Í
u. f j
M.H
l
IS.fíÜ
•J.Í./II
47Ín
.'iíií'.iM
• i'S
.:»
Cuht'T
lnfli
l-.l;'
'.f"
ll.l)l;'J
1..'.
ij.'i.
1':
l'OO
.d! 'T
.
t'
.¥•
M.".
II l'.'. ''.."i
ii'ir.v
.i'
.:M
;>(l.
L'-Í
.U0 :
;i?i'l
ÜH
u''M
>a
!,:«
*'
3Í7Ü
S
ííl.V
.M
7!í'y
.!2
•Si! ira
S'S
'-
M.d
.'1-J
'iD
.i-'.'t
•-'
Pi-<
r. B
.ÍÍC
I.I.
uní
t-or rl
!¡ I
KW
.TÍ
i!'-',-:
'; o-;
;; "•;•:
0.
Cd.'í
'i '"
•.:•!
?:!!!£
ti ."-.
j0 '.'-M
n .
;• -
i
t) '-.!';
,'
i'aíii
l.í-ll
á.'rf
i?
A'^
l.X
l.%
1
2l.tL
»l
TO
.570
'ia
I'J
U
| tt
J.4
:'.»
!>5.K
I3
í".1» W
ü
C '• ,•.".*
n m
;i,'.
II
IX. 1. '.
II IH
VJtl
» i
.'.-;.
s
ü'i
'i'r!
i»,"i-V
.U
.tH
I
uili'.H
g.'!w
l?
DiA
mrt
Rt
iiesn
u.io
O i.*;u
i* ;•
.'t
u -
jii"
-" "
Í'M
t>
4 17
il M
u.
li.r.T
.vt
y '.i.;"
" 7
.:s
II "M
'¡
t.i-
.i
l'i-»
i
í'íis
i' .W
fl -;-
a
-11...
J *••
;>'
¡; ,r-T
.T
l'liÜ
-M
líesw
tctic
iii j
xir
lt/J
m.
pañi
1 11
1111
* tk
- .•H
txid
n.
Keüis
lonci
tt (
x>r
mm
! y t
w m
. IV
M>
de I
ci»
1 d
o «
.tilir
e ic
uiil
u:
B.D
l!l
íorf
o s
imple
fo
rmvn
r, B
^'u!ln
>].f
i.Tí*l ulin
is n
25* C
. 0.
01 («
(U o
lim.i n
2/i"
C.
El
forr
o «
inip
lii n
tloW
ii (tb v
itlric
, nbulU
¡-r
-su ¡
«uní
n«f
•:'
("-m
ulle
1.Ü
515
ohm
ít a 7
5'
C.
IJ.O
ISM
fi olir
nt
u 7
J'
G,
y
fwn ic
ui.l
nprn
xúna'lA
ffif-
nlc
^jut)
el f
orrw
sim
ple
o ili
íMu
-Zk-
oo oo
La altura hcu1,de la sección del cobre efectiva,, se de-
termina así:
=
i A -i t n
Di(mnu) (2.21 )

C A P I T U L O III
En' el mo cor de inducción (7) puede hacerse el en t rehice
rro tan pequeño como ce quiera, .-Mientras las condiciones mecáni-
cas lo permitan,
Un en t rehierro pequeño supone pocos amperios- vuelta, o
sea una pequeña corriente de e^i b ación. Como esta corriente es
la reac ti va que las máquinas de inducción toman de la línea, con
viene ante todo reducir el entrecierro para obtener un factor de
potencia favorable*
De todos modos (3) un entrehierro excesivamente reduci
do aumenta la dispersión cu zigzag, empeora el arranque y se ha-
lla expuesto a provocar ruidos de origen magnético.
El cálculo de la dimensión del entrehierro . aproximado
se lo expresa de la siguiente manera:
í 0,1 + 0 , 1 ^ 5 - P v (mrn) (3.1)
En la que: Pv; (KV/), definido en 1 . 1
3*2.- Forma de ranura del estator
Las ranuras del estator y rotor deberán tener tales
proporciones que se logren reactancias de dispersión razonables.
Según J. Kuhlmann el ancho de la ranura. del estator es
generalmente 50/S del paso mínimo del diente (superficie del en-
trehierro) y deberá frecuentemente si no siempre, exceder el 60/o
del mínlrao paso del diente. Para e vi tar grandes reactancias de
dispersión y consecuente. uente malas características de operación

-26-
las ranuras del eíjlator no serán generalmente, más profundas que
seis v G c e s c1 ano} i o a o 1a r an u ra*
La B r a n u .i • a a ci e m o t o r c s pequeños con f r e c u o n c i a se c o n _§
t rayen trape cíale-:, a causa de la inducción de los dientes y en
la mayoría do casjs con los flancos de los dientes paralelos, a
fin de que permanezca constan ce la inducción a lo largo del dieri
te.
La ranura generalmente es s eirá cerrada, con una abertu-
ra de unos dos a tres inllimetros para introducir por ella los C£
conduclores.
3.2.1.- Aislamiento de la ranura del estator
a) A continuación citaremos brevemente las clases de aislamien-
tos con el objeto <i-¿ establecer los límites de temperatura, ce-
r"ún. la AIEE: American Soc i e t-v o f El oc t rical En ineer s * 1?. c lase
de aislamiento A consiste en:
1*- Algodón, seda papel y materiales orgánicos similares, ln~
prcgnados, o embebidos en líquidos dieléctricos. 2.- Ilateriales
moldeados o laminados con relleno de celulosa, resinas fenólicas
u otras resinas' de propiedades análogas, 3«- Películas u hojas
de acetato de celulosa y otros derivados de la celulosa de pro-
piedades análogas, ¿u- Barnices, esmaltes aplicados sobre los
conductores.
Clase B
Consta de mica, amianto, fibras de vidrió y materiales
inorgánicos similares, cuya forma se logra mediante aglomerantes
orgánicos.
Clase C
Consiste enteramente de mica, porcelana, vidrio, cuar-
zo y materiales inorgánicos sigilares.
- Temperaturas límites de aislamiento.- (temperatura del punto
más cal.i. e rite )
27-
Material de clase: O 90 °C
A 105°C
. B 130 °C
• ' C límite sin fijar
-Valoree lírjitos del au.r.ento de la temperatura de aislamiento.-'
(se obti^no restando ¿fO °C del valor del punto más caliente) así:"
Material de clase: O : 50°C
A -65 °C
B ' 90 °C
C - límite.sin fijar
b) Elevación de temperatura
El límite observable de elevación de temperatura, para
los diferentes embobinados de motores de inducción, no deberá
exceder los valores especificados que dwgún la ASA: American
Standards Association, se dan en la tabla 3-1
Para nuestro diseño de motor de uso generalj. se usará
aislamiento clase A. Los devanados son: conductor de cobre re-
dondo esmaltado.
Para el aislamiento de las ranuras con el núcleo y en-
tre bobinados se usará papel Prespan de espesor ¿e O,-18 mm. , con
una rigide'z dieléctrica de 11.8 KV/mau 3 que por su facilidad de
trabajo; y excelentes propiedades dieléctricas con respecto a su ,
reducido espesor lo hacen muy convenientes para su uso.
Según el Proyecto de Horma Ecuatoriana» Máquinas Eléc-
tricas rotativas 0¿f cOl -¿fOl „- .Requisitos* En ausencia de indica-'
ciones; la máquina será destinada a funcionar en un clima templa
do y la temperatura ambiente no deberá superar los siguientes
límites.. . . '
a) temperatura .máxina ¿fO °C
b) temperatura media diaria 30°C •
c) temperatura media anual 20 "C
S_-i la máquina es destinada a funcionar en clima tro-
pical,: estos límites-aumentaran en 10°C.

-28-
Tabla 3.1
Limites de elevación de temperatura
Elevación máxi-
ma de tempera tu.
ra (°C) -
Parte del motor
Devanados
Núcleos y par-
tes mecánicas
en contacto ó
cerca de aisla .
miento
Colectores y
conmutadores
Método de deter
minación de tem
peratura
Clase-aisla-
miento
Termómetro .
Resistencia
Termómetro
Termómetro
Motores
uso
general
A
ko50
¿fO
55
B
-
-
-
75
.Motores
totalmente
cerrados
Á •
5560
55
65
B
7580
75
85
Otros
Motores
A
50
'60
50
65
B
70
80
70
85
Si la máquina es destinada a funcionar a una altura su-
perior a los 1.000 metros y es refrigerada con fluido gaseoso a
la' presión atmosférica correspondiente a (esa altura los límites
de calentamiento especificados deberán ser reducidos en el \%
por cada 100 metros sobre los 1.000 metrps. • ' I/
La máquina se refrigerará por iradiación, es decir la su.
perficie de ésta, está expuesta'al aire de enfriamiento y por el
flujo de aire dirigido por aletas fijas a los anillos de la jau-
la
3.2*2.- Dimensiones de la ranura estatórica.
Las ranuras del estator serán del tipo trapezoidales
semicerradas y con las_.c-aras de los dientes paralelos como lo
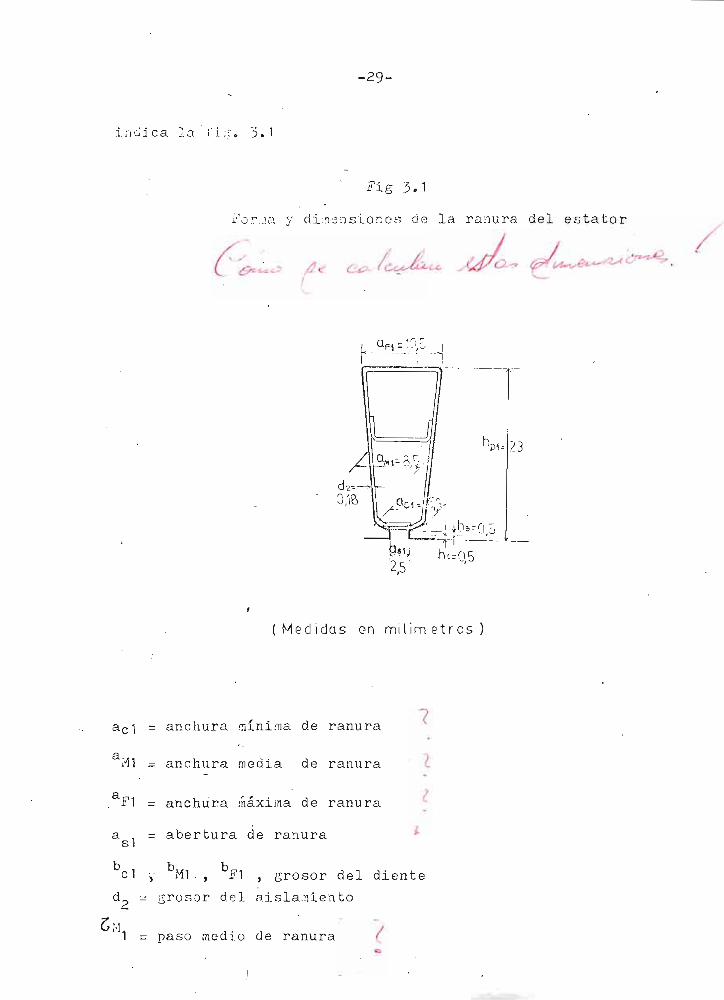
-29-
'P1
25 'i-1
( M e d i d a s on mtlirn e t r o s )
aci = anchura mínima de ranura
ai-ll ~ anchura media de ranura
F1 - anchura.máxima de ranura
a , = abertura de ranurasi
el y MI , F1 , grosor del diente
1 = paso medio de ranura (
-30-
Las di'iicnsionec h-, .y h, varían, entre 0,5 y 1,^ tam. para motores.j *-t
pequeños.
El paco mínimo de ranura de estator (en la superficie
del en urehicrro)
; (3.2)
3 <%. 3^
área cíe la ranura ciueda determinada.
— (¡nm2) (3.3)
En donde c¿1 es el coeficiente de relleno de la ranura, que se-
gún; (9). para diámetros de conductores menores de 1 ,7 ni:n este
varía entre 0,4 y 0,¿f5; valor que también considera el aisla.uieri
to de la ranura.
3*3•- Ranuras del rotor jaula *i
Es necesario escocer un número adecuado de, ranuras en¡
el rotor, en relación con el número de ranuras en el estator,
para evitar en esta for:¡ia características indeseables,, como es
las armónicas, vibraciones y r u iaos»
Se¿un "Cálculo Industrial de Máquinas Eléctricas" Te ¡no
II de Juan Corrales Martín.; resuiae lo.s criterios de relacio-
nes entre ranuras así:
a) En ningún caso los números de ranuras del estator y del rotor
han de ser iguales, o múltiplos entre sí „
b) Las ranuras de una de estos dos órganos, las del rotor gene-
ralmente» , conviene disponerlas con una inclinación tangencial
igual al paso de ranura opuesto.
c) Se recomienda que el número de ranuras de rotor, !{„ sea par
d) También os recomendable ;
N? <Cl,25 *U + p; para rotores que han de marchar en un sólo sen
tido y . . ... • / ,.
K <^1525 i'L. ; si han u e girar en ambos sentidos.
e) La diferencia entre NI y Np será al menos de un 1 0/o
f) Se tomará' siempre: N_ - N-. -¿ (+ 2p)d \ ~~
g) El número de ranuras Kp no ha de ser múltiplo de ( 75 ^3? 19)2p;
para ¿t- polos; por ejemplo, hay que evitar un rotor de 28¿ 52; 76
ranuras; de lo contrario aparecen durante el arranque manifesta-
ciones de marcha monofásica a ciertas velocidades reducidas*
h) En general conviene que N y Np no sean divisibles por 7; 13;
19, es decir que el orden de los armónicos de sentido giratorio
directo.
i) Interesa a ser posible que el. número de ranuras del rotor sea
múltiplo del de pares de polos.\) El mínimo denominador común de H- .y N? señala las coincidencj.
cias de posición entre ranuras opuestas de estator y rotor; es-
tas coincidencias no deben exceder de un sexto del número más
bajo de ranuras • '
N N N1\ Al . J.1 --,
j ) I L ' f f~m . d , c v <( > < - ;y6 ' 6
Para evitar todas estas comprobaciones relacionadasi't
con el par y otras que tienen en cuenta él peligro de ruidos y vi
br ación es de origen magnético, se encuentran preparadas, tablas
de ranuras compatibles, algunas sobre bases puramente analíticas
y otras corregidas según experiencias constructivas. La tabla
3-2 puede servir para motores de corto circuito»
Abundan estudios teóricos realizados sobre esta mate-
ria aunque la práctica no siempre viene a confirmarlos con bodo
«32-
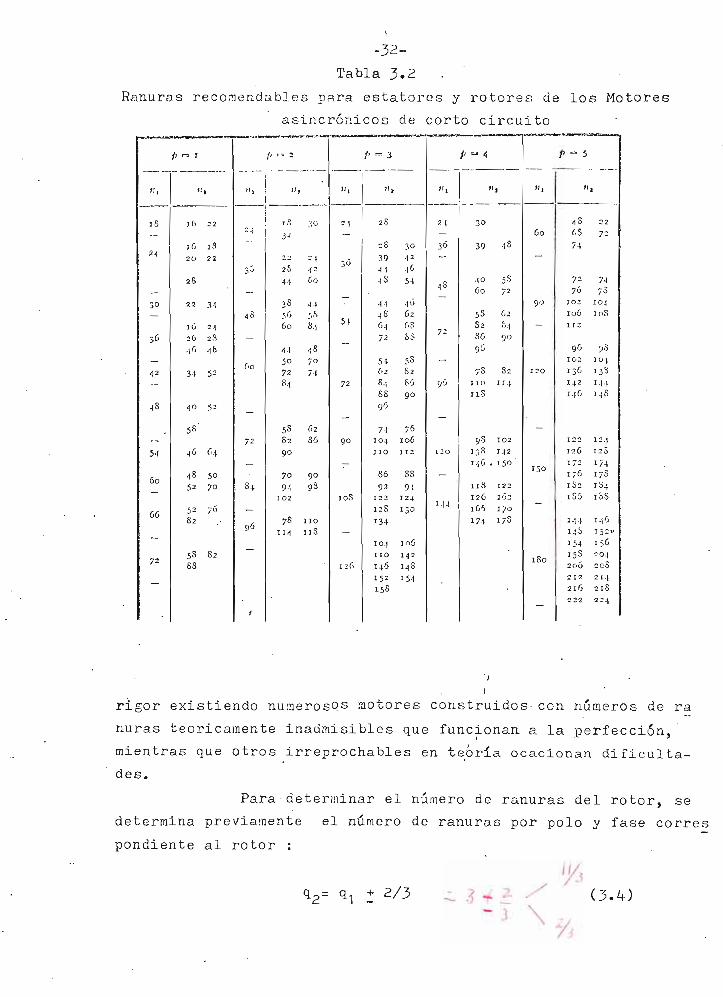
Tabla 3.2
Ranuras recomendables para estatores y rotores de los Motores
asincrónicos de corto circuito
48
54
6o
06
40 52
48 5052 70
.}•£
70 90
78 i jo1 18
51
joS
126
P - 3
"2
2S
28
•1148
•1 \8
647'~
5462848896
7-5104IJO
8692
122
12S
134
104
110
146
I52
158
3°
46
54
46fj7.
63í>S
5382S69o
5"61 06112
ss9!
124130
106142MS
I5-J
P <-* 4
30
39 4S
40 586o 72
58 6282 S.t86 50
90
-/S 82no 714.TlS
98 102
J.jú . 15"
1 1 8 122
I2Í I 02
1 65 1 70174 i/S
«1
6o
90
—
120
-
150
180
_
P - 5
4S
63
M
7276102
1 06
112
95
I O2
136142
1-íO
122
176
182
iSÚ
MS154i5S206212
Sl6
222
1
— -
22
?2
74/
JO.]
loS
9810Í
i33i.¡.i148
124
i/-!178184iSS
Í4«
156204
co32142lS
224
rigor existiendo numerosos motores construidos- con números de ra
nuras teóricamente inadmisibles que funcionan a la perfección,
mientras que otros irreprochables en teoría ocacionan dificulta-
des.
Para determinar el número de ranuras del rotor, se
determina previamente el número de ranuras por polo y fase corres
pendiente al rotor :
2/34 ¿
- 3
-33-
rip = 3 « 2p . q¿ (3.5)
y que x la ve/: corresponde ig¡:al nú.:;oro, a las barras de la jau
la. Con ;-;,)S ya podemos determinar el paso de ranura del rotor,í'_
en la s u e r f i c i e nel en t rec ie r ro :
en la que: dr ~ diámetro de rotor en mm.
La s r a n u r a s del rotor e s b a r í . n i n c 1 i n a das t a n r e n c i a 1 ;n e n
te en un paso de ranura.
3.3.I.- Barras y anillos de la jaula
En la industria eléctrica de úiotores, se usa general-
mente aluminio fundido inyectado en las ranuras del rotor; para
con Torear así las barras, las mis. na s que son corto circuí tadas en
sus extremos por anillos del ¡ni sin o material.
1 La resistividad o conductividad constituye la propiedad
característica de un conductor y su valor depende de la fuerza,
tratamiento térmico del material y de la temperatura de funciona
miento,, influyendo sobre las c ai das de tensión, y pérdidas y, por
esto últi.io, sobre el calentamiento de la máquina y el rendiinien
to económico de la :;iisma.
El uso de aluminio a pesar de que su resistividad volu
métrica viene a ser, en igualdad de condiciones un 61 -ó superior
a la del cobre, ofrece un sistema de construcción sólido y ecoruS
mico, más liviano y proporciona seguridad durante los períodos
transitorios de so br e carga ( arranque ) , teniendo en cuenta la ca-
pacidad térmica y ausencia de soldaduras.
A continuación según normas ( VDS) la resistencia y con.
duc ti vi dad para el cobre y el aluminio ( tabla 3.3)

Tabla 3-3
Resistividad ( j ) 5. y Conductividad ((T) del
Cobre y aluminio a 20°C
MANUALJ :
\
Cobre Patrón internacional -
Cobre electrolito comercial
Aluminio recocido
Aluminio duro
Aluminio Inyección para
rot.ores
0,.0172¿t=l/58
b,.02778=1/36
0,0303=1/33
•58
56
36
35
33
La conductividad a 75°C del cobre comercial y aluminio
de inyección es 46 y 27 m/IXmm^ respectivamente.
Para /devanados jaula de ardilla, la densidad de corri-
ente podria ser mayor que para los devanados del estator, porque
la espira media es más corta y la ventilación es mayors. luego la
sección, total del cobre del rotor se esco¿e del 50 a 80% de la
sección total del cobre del estator.
(mía) - (3.7)
en donde h ? = altura de cobre efectiva del rotor y la sección
de la barra de cobre- del rotor es;
A , = hcub . . 3 , (3.8)

-35-
,., j paso de ranura del' rotor en inm, Al usar aluminio es ne-
cesario la siguiente corrección de (3-8)-
(TcuAb-= Acub (.<nm2)
• . . . . *-\: Ab = sección de la barra de aluminio en ramí
G~cu = conductividad del cobre
= conductividad del aluminio
(3*9)
La sección de los anillos de aluminio es
A = qn . Ab (mm2)a 2
El'diámetro del anillo es, (íig. 3-2)
D, hj (mía)ti
(3.10)
(3-1
Donde h, = altura del cuello de ranura del rotor en mmd
Fig. 3.2
Anillos del rotor
estator
Di
rotor
Da
Aa
Con la. sección del anillo (3«10)? se fija las dimensi£
nes de 'este, para luego calcular el diá.ae tro medio del anillo
(D ), valor necesario para el cáculo de la resistencia del
-36-
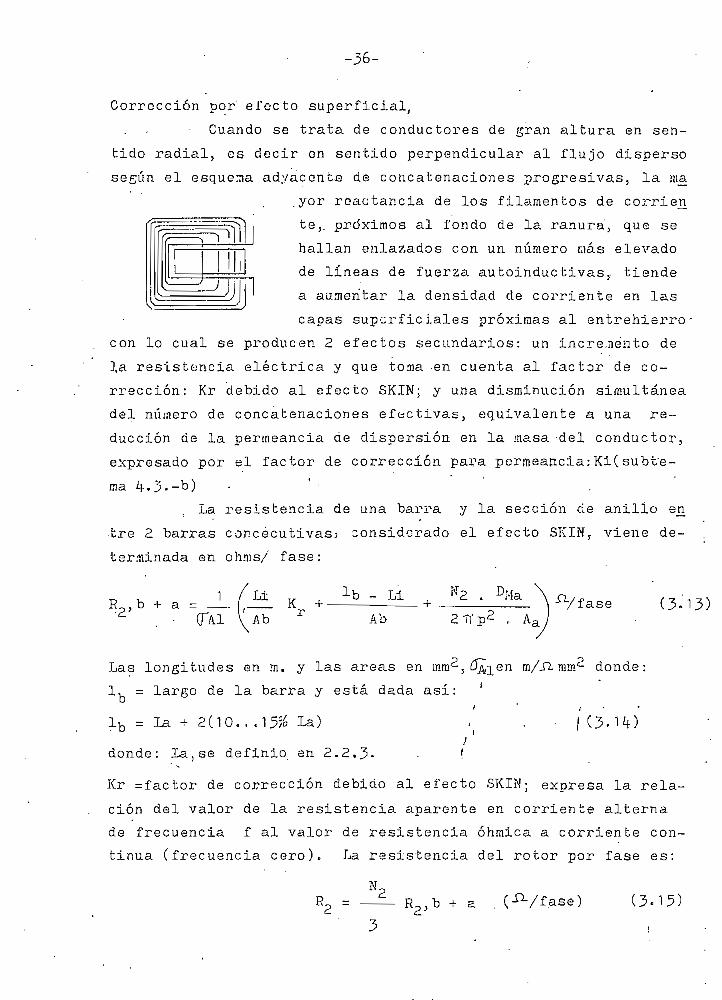
Corrección por" efecto superficial,
Cuando se trata de conductores de gran altura en sen-
tido radialj es decir en sentido perpendicular al flujo disperso
según el esquema adyacente de concatenaciones progresivas, la ma
.', yor reactancia de los filamentos de corríen
te,, próximos al fondo de la ranura, que se
hallan enlazados con un número más elevado
de líneas de fuerza autoinductivas, tiende
a aumentar la densidad de corriente en las
capas superficiales próximas al entrecierro -
con lo cual se producen 2 efectos secundarios: un incre.nento de
3,a resistencia eléctrica y que toma -en cuenta al factor de co-
rrección: Kr debido al efecto SKIN; y una disminución simultánea
del número de concatenaciones efectivas, equivalente a una re-
ducción de la permeancia de dispersión en la masa -del conductor,
expresado por el factor de corrección, para permeancia: Ki(subt'e-
ma ¿ i - , 3 . - " * > ) •
La resistencia de una barra y la sección de anillo en.
tre 2 barras concécutívas) considerado el efecto SICINy viene de-
terminada en ohms/ fase:
+ a =Li
K(TAI
1b - Li
Ab
Las longitudes en m. y las áreas en mm-,
1, = largo de la barra y está dada así: !
-°/fase (3*13)
donde:
lh = La + 2(10. . ,15/¿ La) , . - f (3.1¿f). D • , i
donde: la,se definió en 2.2,3* - í
Kr ^factor de -corrección debido al efecto SKIN; expresa la rela-
ción del valor de la resistencia aparente en corriente alterna
de frecuencia f al valor de resistencia óhmica a corriente con-
tinua (frecuencia cero). La resistencia del rotor por fase es:
R,,-b + a . (-"-/fase) (3.15)

-37- '
3-3.2.- Forana de Ranura del rotor
. Previamente se necesita determinar las pérdidas en el
estator y rotor en el momento de arranque, Y para esto fijar
los valores do torque y corriente de arranque con respecto a los
valores nominales así co.no la corriente de magnetización. .
El diseño de este .notor; de "Clase A", caracterizado
por un torque y corriente de arranque nor-ial y bajo deslizamien-
to. .
Según Normas "NEMA1,1 (National Electrical Manufactures
Association) da valores de Porque y .corriente a rotor bloqueado
para motores trifásicos de diseño A,a pleno voltaje y 60 Ha. en
las tablas 3*H y 3-5: los cuáles son expresados con respecto a
los valores nominales y representan el límite superior del rango
de aplicación. . .
Tabla 3.4
Torque a rotor bloqueado. Motor Jaula.-
Diseño A y B (60 H2)
H.P.
3
5
- ?Va
10
VELOCIDAD Sr:CRO¿ICA
3«6oo
160
150
lifO
135
1 .800
215
185
175
135
1 .aoo
155
150
150
150
900
130
' 130-
135
125
Para esta clase de diseño según (10) se toma:
T ''a _ c (3.16)

-38-,
En donde:
T =aT =XNI"a
Torque de arranque
Torque nominal
Corriente de^ arranque del estator
Corriente nominal
Tabla 3<5
Corriente a Rotor Bloqueado, Motor Jaula
a 220 V.
H 0 P .
3
• 5
-71-
10
Corriente
Amp.
6/f
. 92
12?
1?0
Letra de
Diseño
B 3 C , D
B 4 C , D
B , C 3 D
B, .C.D
'La corriente de excitación en los motores de inducción
(11); alcanza un valor de 30 a 50/á de la corriente a plena carga
Las pérdidas de arranque en el estator en vatios:
Plrt = 3JM.,2 (W) . (3.1?)
3R- 3 en ohmios ( H ) y I en amperios (A) y las pérdidas de ani aque del rotor:
?.,„ = L-Pw (W) (3-18)
•an-
las pérdidas totales en el arranque
+ 2;a = + P2a (W) (3.19)
A una escala conveniente se gráfica estas pérdidas y
la£3 corrientes como lo indica la fig. 3-3 que es un diagrama del

-39-
ciroulo ürovio.
Fig. 3,3
Obtención de corriente Rotórica
La magnitud OA; determina la corriente en vacío, luego
desde el punto O, con la magnitud de corriente de arranque y la
intersección con la magnitud que representa las pérdidas tota-
les levantada perpendicular a la prolongación de OA se determi-
na el puntó, de arranque que es B, Luego se traza un circulo que
pase por los puntos A y B y cuyo centro este en la prolongación
de- Ó7u
De este gráfico se define: (El subíndice a. significa:
momento de arranque; y el apostrofe: valores referidos al esta-
tor.
I* = AB = corriente del rotor en el arranque (referida)¿a
I & = AC =5 corriente del rotor en el arranque,, considerando las
resistencias del estator y rotor nulos.
La resistencia del rotor en- /fase,. se determina de la siguien-
te ecuación:
T"a P,. (3.20)
- 2 a

o CO ct
ir1*-7
p
H-
CO
vn
p co o ct c 4 co o o H-
o o.
0 I
co o 0
Ci- ro <t
o 4 H-
P CD CO o rt O en CS
o o p f_l
o <<;
H O
CO 0
•
M
O ct
O
O M CO O O P O 0 a P p, o
o
3o
p
co o o H-
H*
ct
M O O O o \-~> Í3 c
Oa 0 o 5 P.
o
Q CO o o ct
O ct
H-
N P O H-
O*
O co CD 1
X
M
P-
0 CT- O H-
P P
lo CO 0
O rt-
r-1
CD P O O 2
P. o
c< <
f\ \\>
Q-
O
VM * PJ
ct
O
O i

fig. 3.5
Forna y dimensiones de ranura del rotor
.{Medidas en milímetros)
' La experiencia en la industria eléctrica aconseja para
motores pequeños los valores: h^ = 0,5 nun; hv = 1;5 mm; y
Aumento de la resistencia debido al efecto pelicular para una
sola "barra maciza por ranurae
^ 6
.2 3 4
->Attura equivalente7-, h'
La alturo. radial de la barra conductora h es:
(mm.) (3*25)
¿¿o = 4 fY ." 10 ^ i" *. (permeabilidad del vacío); w en rad/s
A
en 1 /si. m
El resto de las dimensiones de la ranura se calcula en . el capi-
-lo VI
3«¿f«- Fuerza Magnetomotriz (FMM) en el entrehierro
El circuito magnético de una máquina, por cada par de
polos abarca el yugo, dientes del estator,, el tíntrehierro^ dien-
tes y el yugo del rotor. La densidad del flujo no será la misma
para las distintas partes del circuito, entonces los amcerio-vuejl
tas deberán.ser calculados separadamente para cada parte del cir-
cuito magnético.
La densidad de flujo (B) en un entrehierro para motor
de inducción queda generalmente, entre los limites de 3*S?0 y
7.000 Gauss. ..
3.¿t*1*~ Factor de Cárter y Factor de Forma ' .
La reluctancia relativamente grande de las ranuras obli
ga al flujo del entrehierro a sobresalir en las extremidades de
los dientes.
Por lo tanto puede.concluirse que el efecto de las ranu
ras es aujneji r_ La_JLojiff:i_tud erec_táj¿a_ del entrehierro, desde ¿ has
ta un valor ¿ , tal que:

(3.26)
(3.2?)
donde : 2n-' naco cié ranura -en :íi::i.
Fig. 3.6
12
El factor de forma: es la relación entre las densidades de flujo
máximo y .ncdio en oí entrehiorro :
cÁ^^ÁlL, (3.28)
Aquí ee adopta el- = 1 , k valor que es verificado y corregido en JS.7
La PMM en oí entrehierro en Amperios-vuelta es:
• • ' - ' (A"V) (3'29)
B £M en T, e» e& my M-o en T.m/A-v
3«5-- Fuerza marenetomotriz en los dientes
a) Para nuestro diseñOj con. las caras del diente del estator pa-
ralelo; se tiene una inducción constante a lo largo del mismo
por consiguiente la densidad del flujo en el diente del estator
en Teslas es;
Bnl = -LÍ ' Znl .. B < M (T) (3.30)
. Ke . L . bDr
en donde; Snl = paso del diente del estator en mm.
. • "b]\ ancho del diente en mm,
Ke = factor de afilamiento de chapas, (0.93- - -0,:9¿t)
Al no utilizar, ranuras de ventilación: Li = L
En la Fig. 3»7; Ce las Curvas de magnetización para cha
pas para dinamos se puede determinar la intensidad.H ea A-v/cm.
para un valor de densidad del flujo 3,6 Tesla^ (T) o Gauss.
Finalmente la fuerza magneto.Tiotrís es" el p'roducto de la<iintensidad del campo por la longitud dpi circuito magnético reco_
rrido»-,
La FMM del diente del estator es:
VD1 = HD1 . hD1 (A.v) (3.3D
H^- en A-v/cm y hD1 en cm.
Según (12) la máxima densidad de f lujo en los cuentes
de armadura no excederá a los 15-500 Gauss" (1 5 55T) . ' ;
VI E, Zi. II 0. 6 ¿ 9 5 I t O
p tiono.M
L'i : Qjn&ij.
. '• - M V : -
. v-p i • -'V'J^J '^c

.1(6-
b) Cuando el diente es de grueso tangencial variable, la induc-
ción, oí campo y la excitación también varían a lo largo del
diente. ?!1 valor medio .de la intensidad de campo en los
dientes .-educida de la* fórmula de SIMPSON es:
H, 1/6 '(H + ¿Í.HH + HjO (3.32)
donde:
H , HM y Hn son intensidades de campo correspondientes a la cabec' M I1 ~za, al centro y a la raíz del diente.
En este disonó se tiene en el rotor ranuras con los la-
.dos de los dientes paralelos, luego para el cálculo de la densi-
dad en los dientes del rotor B_p,e intensidad K~p ,ae calcula si-
guiendo i£iial procedimiento que se realizó para el estator.
VD2 (3-33)
hD2 = altura del diente del rotor (Fig 3-5)y '/D2 es la FMM. ¿el
diente del rotor.
3• 6. - Fuerza Matf:netoaiotríz en los yu^os
La profundidad de las laminaciones del estator abajo
de la ranura, las pérdidas en el arco del yugo y los Amperio-
vueltas requeridos para enviar el flujo a través del mismo, de-
terminar la densidad.
La densidad en la parte más angosta del diente oscila
entre 1,75 a 252 T y en la parte media igual o menor a T}6 T •
según .(13) y densidades similares para los yugos.
Para determinar la FMM de los yugos,, tanto del estator
como del rotor se procede así:
Se toma.la-altura del yugo.
h ^ O 32 5 p (mm).y (3.3¿f)
-ítf-
( 3p = paso polar en irui) luego se determina la densidad de flujo
en el yugo. :
Bj (O?) (3.35)
Con este valor y de Fig. 3-7 (Curvas 'B-H para chapas) se determi.
na la intensidad magnética de los yugos H ,
Con el valor B como parámetro y la relación y altura del yugo ai/
paso polar del yugo (h v/5y) de la Fig. 3*8 se determina el fac-
tor K ; valor con el que se calcula la FMM. del yugo en A-v;V
V = £H K £ (A-v) (3*36).y ¿ y y y - -
H en Av/cin; J en cm»o" J
3 « 7 « - Fuerza' Maffnetomotriz total y Corrección de Valores
Para la corrección de valores se calcula el factor de _
forma final (c¿s), ya que el factor de forma asumido en 3*^-1
era provisional; .se lo hace con ayuda de la Figc 3-9 en la que
el factor de saturación se determina:
+ VnpK =- - - (3.38)
Luego el factor de corrección será
Corregidos los valores de FMM del. estaitor y rotor se determina
la FMM total por polo de la máquina.
Vrn = Vf + V,,, -t V__ + V , + V ^ (A-v) (3.39)T . ¿ DI D2 yl y2 ^ J \J*jyi
donde:
V 1 - FMM en el yugo del estator en A-v
V = FMM en el yugo del rotor en A-v

Figura: 3.& // ,/
Dftcrminaciondel factor Ky (FMM ene! yugó)
1>¿£
1,6
1/
Figura 3.9
Fador de formade la curva de campo
ú:/K
k\"s:
^•\ ;
•- ¿"
1.J
^-^-— -• — --
) 0,2 0,¿. 0,6 0£ 1,0 1,2 1,A 1¿
pocd normal sdturacion " altamentesaturada
..... Ti. (X
C A P I T U L O IV
CIRCUITO EQUIVALEÍTE í CONSTRUCCIÓN DEL LUGAR GEO/.STRICO
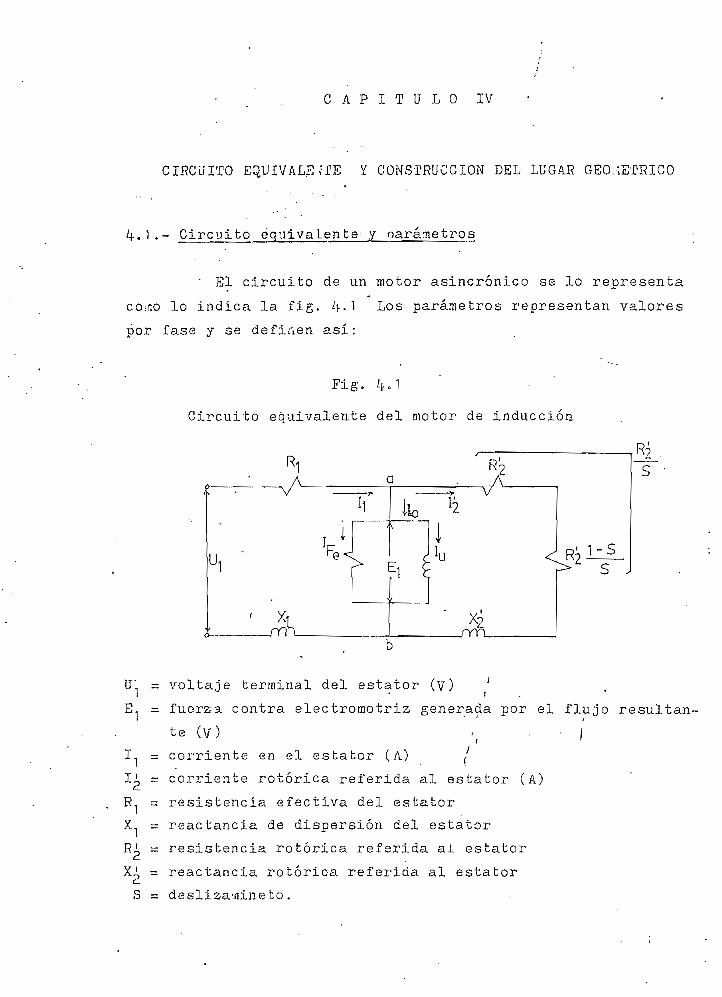
¿t.. 1 . - Circuito equivalente y parámetros
- El circuito de un motor asincrónico se lo representa
confio lo indica la fig. ^.1 Los parámetros representan valores
por Tase y se definen así:
Fig. ¿t.1
Circuito equivalente del motor de inducción
R R-
U
11I
V>
lio ¡2
''
rr rrr\
Üs
b
= voltaje terminal del estator (y) ;
fuerza contra electromotriz generada por el flujo resultan-
t e ( V ) ' i 1 ' 'corriente en el estator (A) t
corriente rotórica referida al estator (A)
resistencia efectiva del estator
reactancia de dispersión del estator
resistencia rotórica referida ai estator
reactancia rotórica referida al estator¿S = deslizaidineto.
E, =
J '2'
R-

-50-
La corriente del estator,, se divide en 2 componentes:
una corriente de carga (I¿r) y otra de excitación (lo) requeri-
da para croar el flujo resultante del entrehlerro; esta corrien-
te ultima Cieñe-2 componentes: una, correspondiente a las pérdi-
das en el hierro (1 , ); en fase con E,; y la otra, una componen-
te magnetizante (lu); abrazada 90° de E^. Para el diagrama del
círculo se tobará, la corriente magnetizante aproximadamente igual
a la de excitación tornando en cuenta que la corriente debida a
las pérdidas en el hierro son pequeñas^ esto da lugar a la repre
sentación del circuito equivalente simplificado de la fi». ¿i--2 .
Fig0 Zf.2
Circuito equivalente simplificado del motor de inducción
rm X2mn
s
R2S
¿f .2 . - Reactancia y loermeancia del estator
1.- Reactancia efectiva de magnetización, X,,
Desde,el punto de vista de diseño3 XM, es la reactancia
debido al flujo del entrehierro, y X- y X~ son reactancias de
dispersión debido a otros elementos de flujo producidos por los
respectivos bobinados. La X.. según (l¿t) se la expresa:
L¡n la que los parámetros se han definido antes,
l'ls convonionle, (Ib), tener un valor grande de Xv.5. y
peiiuoños, X. y X-; co:::0 soa posible, para obtener un buen ren-
d i .: 1 e. n ': o d o 1 .1.• j t o r. La r e o. c tan c i a U e d i s p e r1 jj i. ón, X,, -f Xp 5 e s - di.
viciada por conveniencia en 7 co,p_.onen^es distintas;
a) La reactancia de ranura primaria
b) La reactaiicia de ranura s^c^.ndaria
c) La reac táñela de dispersión-en zigzag
d) La reactancia dobido a la inclinación
e) La reactancia dispersión de ciuturón
f) La rcactáñela de dispersión de cabeza de bobina
r-:) La reactancia increpen tal.
(c), (d) y (e)? juntos constituyen la dispersión del entrehierro
de bido a armónicas del cuinpo del en t rehierro, (g) os la reactan-
cia adicional que existe a plena velocidad.
En vac lo cuando la corriente del estator es ••rtuy peque-
ña y la corriente del rotor es prac tic a.;; ente cero, substancial-
r.ienoe todos ectos flujos cruzan el en t rehierro y si ¿en el circ-.;!.
to magnético norial a través u el hierro del estator y rotor, y
dientes (línea ¿u fi¿-, ^.3)- Al aumentar la car¿;a, el aumento de
corriente rotórica produce una disminución de ?'A:A. en el entrehie
rro. Este momentáneo decrecimiento del flujo total y del volta-
je ind :cido, per.r.ite que fluya .ñas corrie:ite desde la línea; la
corriente de car¿¿a del estator y la corriente opuesta del rotor,
combinadas produce un flujo que fluye por los caminos de disper-
sión através de ranuras y punta de los dientes entre estator y
rotor (líneas 1, 2, y 3, fig. ¿f.3)
2.- Permeancia total del estator,Al
de b .¡binas.
-52-
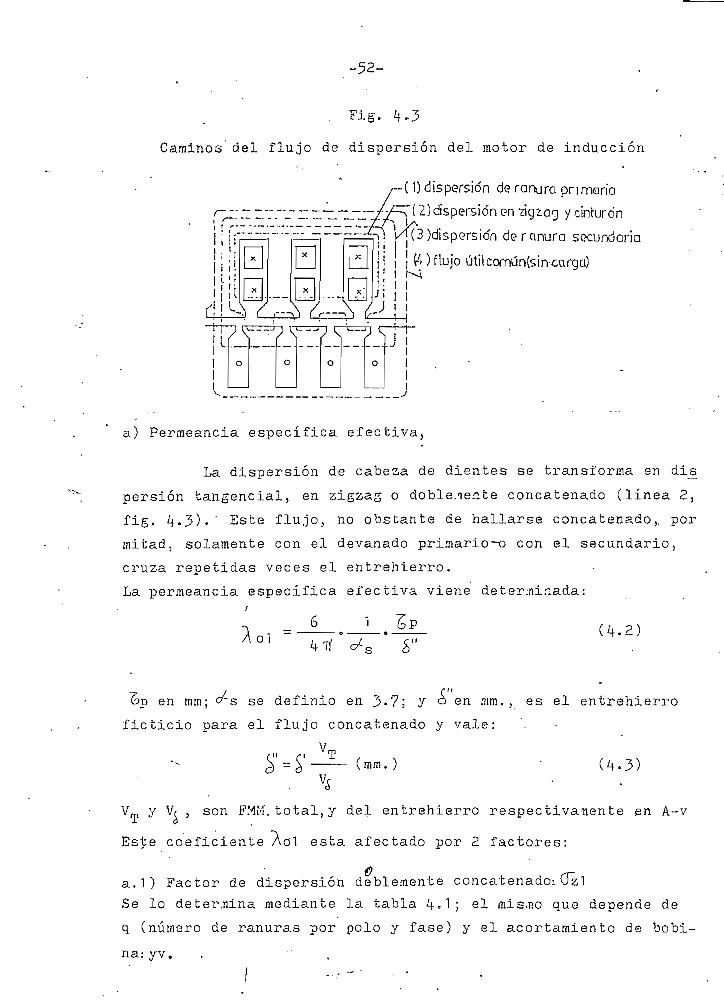
. Fig, /f.3
Caminos del flujo de dispersión del motor de inducción
1) dispersión de ranura primaria
(2)dispersiónc?n-zigzag y cinturo'n
i/H3)dispt?rsio'n de ranura secundaria
, ¡ ¡ (4) flujo útil comúnfcin carga)i! i h-4
a) Permeancia específica efectiva,
La dispersión de cabeza de dientes se transforma en di_s
persión tangencial, en zigzag o doblemente concatenado (línea 2,
fig. 4.3)-" Este flujo, no obstante de hallarse concatenado,, por
mitad, solamente con el devanado primario-o con el secundario,
cruza repetidas veces el entrehierro.
La permeancia específica efectiva viene determinada:¡
6 1 SP /. ^voí ¿fTÍ
I rii
fep en mm; <^s se definió en 3-7; y o en mm., es el entrehierr-'
ficticio para el flujo concatenado y vale:
- C (mm. ) • (¿f»3)
V_ y Vr 5 son FMM,total,y del entrehierro respectivamente en Á-v
Este coeficiente Ao"l esta afectado por 2 factores:
a.l) Factor de dispersión doblemente concatenado: Ozl
Se lo determina mediante la tabla 4-1; el mis.no que depende de
q (número de ranuras por polo y fase) y el acortamiento de bobi-
na: yv. . ,

-53- .
Tabla ¿ 1
Factor de dispersión doblemente concatenado
:" TOO ffz\yvxí
0
1z
3
'+
5
6
. i
9,66
9,60
2
2, Síi
2,35
2,8¿f
3
1 , ^ 1
M5
1 , 1 1 "
1,41
k
0,39
0,7/t-
.o,6a
0,69
0,89
5 .
0,65
0,55
0,/i4
0,41
0,50
0,65
6
0,52
0,if5
0,35
0,39
0,31
0,írO
0;52
a.2) Factor de dispersión, debido a inclinación de ranuras: (Ti
Cuando las ranuras del estator y rotor son inclinadas; este fac-
tor viene dado así:
(Ti* 0,0915-1— (¿¡../O
*1
y-cuando sólo el rotor, ó sólo el estator esta inclinado:
(Ti = U.5)
donde q1 - número de ranuras por polo- y fase del estator..
b) Permeancia específica de ranura del estator ARI,•
Se determina según (16) y to.na-ido en cuenta las dimensiones de
la ranura estatórica, (fig. 3-1)
hDl - hí,. Kc
3 - Ic1
a.
Ic1
2h- h,
asl

Todas las longitudes en m;n. ; Kc, factor de corrección para la
perraeancia del cuerpo de las bobinas en la ranura y Ka, para la
permeancia del espacio exterior a. las bobinas con arrollamientos
de paso acortado trifásicos de 2 capas. Estos factores se deter
minan> de la fi£, ¿r«4 que están en función de la relación del
ancho de bobina acortado al paso polar^dado en ranuras.
Fig. ¿f.¿f
Factores de corrección Kc y Ka para la
Permeancia de ranura •
O 0,1 0,2 0,3 0^ 05 0,6 0,7 0,o 0,9/ 1p
(Wa/5pjen ranurasc) Permeancia específica de la cabeza de bobina, A q li ';f
Para esta permeancia, las soluciones teóricamente exactas
son complicadas y sujetas de todos modos a fuertes desviaciones .
con respecto a la realidad, por la impresición que los detalles
y la 'disposición constructiva imponen a los datos, .-aproximada-
mente es: .
L= 0,075 1 + U.7)

.-55-
(íp, paso polar en aun, y .L - = longitud de cabeza de bobina del
estator en mm. La permeancla total del estator es la suma cíe
la permeancia de ranura; la de cabeza de bobina y la de zig
L JÍSL. + /Ic'l- L + }ol fbf «Tzl * (Til) . (4.8)q1 Li Li
Sin canales de ventilación 'L , = Li.
3.- Reactancia de dispersión del estator,, expresada en - /f ase es
/¿o = coeficiente de permeabilidad y vale 4TI" • 10~' (T.m/A)
í = en Hz; Li en ra,
¿t.3«- Reactancias y permeancias del rotor
1 .- Permeanciá total del rotor, /\
En las máquinas asincrónicas los caapos de dispersión".-
se presentan en el estator y en el rotor. En el rotor se consi-
dera, la dispersión en las ranuras,, dispersión en zigzag y de
anillos frontales (rotor cortocircuito) ;
a) Permeanciá específica, efectiva del rotor:-\ 'A O 2 i
i 'Corresponde al campo de dispersión que partiendo de la
V
cabeza de un diente del rotor, atraviezan el entrehierro y se
cierra por la cabeza de un diente del estator. Puede verse al
dibujar el flujo de- dispersión concatenado en la fig* 4*3 Q' e el
camino que entra en consideración para la dispersión del estator
y rotor, aproximadamente es el mismo; por lo que se considera el
coeficiente de permeancia en zigzag del estator y rotor iguales

-56-
a * l ) El factor de dispersión doblemente concatenado del rotor,.
<Tz2, para rotor jaula 53 determina según los valores expuestos
a continuación en función del número de ranuras por polo y fase
• . Tabla /*.2
Valores del factor de dispersión doblemente
concatenadojrotor tipo 'jaula.
^100 (Tz2
1
9,66
2
2,29
a'/3
,,66
fn
1 J28
3
1 ,02
3>3
0,82
32/3
0,63
¿f
0557
q^ ¿|. - (Tzz z.-2j°9 ' (¿f.io)2 •' • (q2)2 " '
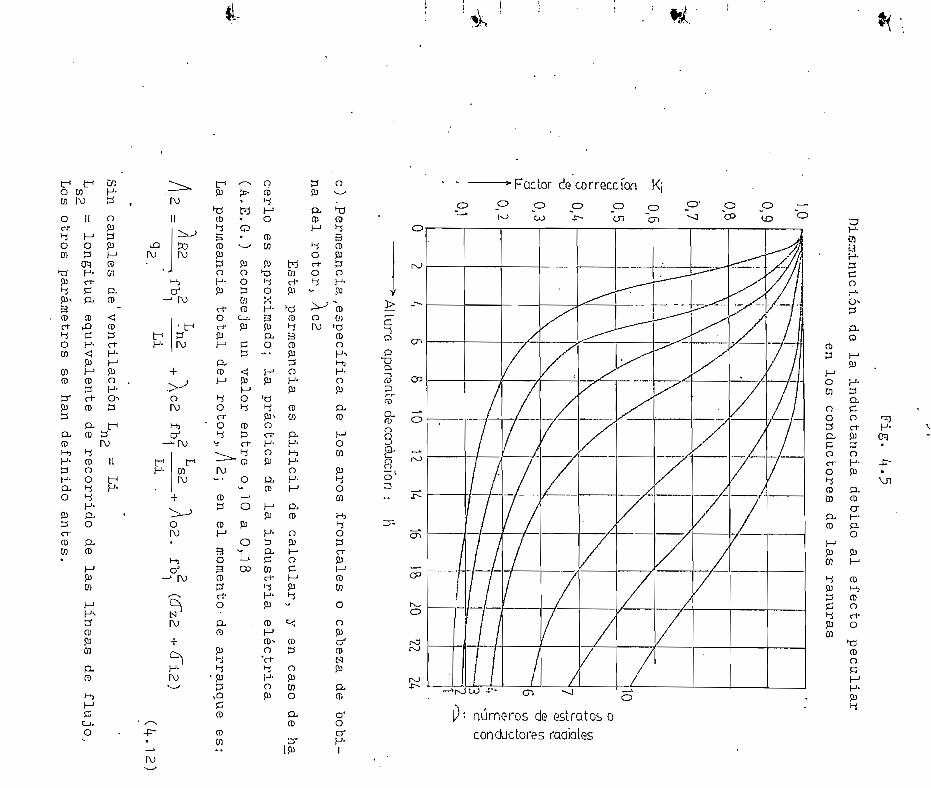
b) Permeancia específica de ranura del rotor.
queda determinada por la fórmula siguiente con las dimensio
nes de la ranura'rotórica; fig. 3«5 según (1?) vale;
/R2 =h2 v hd Ki
3 as2
longitudes en rara.
En donde Kis es el factor de corrección para la permeancia de
dispersión dentro de la ranura5 y considera la disminución simuí,
tánea del número de concatenaciones efectivas del flujo disperso
equivalente a una reducción de'la permeancia de dispersión, en
la masa del conductor. Su valor se determina de la fig if.5 en
función de la altura aparente de conducción hf definido en 3*3-2
y como parámetro de estas curvas el factor i/, número de estratos
de conductores aislados radialrnerite superpuestos. En rotor jau- .
la como hay un solo conductor (barra) por ranura, luego y - 1
tr1
o ro o rr 4 O en ^C3 P 4 cu.
3 0 rf O en 01 0 ¿3- P 3 P- 0 Hj
H- 3 H*
P-
O P 3 rr 0 ín
ir1en ro
II H O £S en H-
cf
£ P-
3> *? P- <; P H1
0 rr 0 £L
0 4 0 O O t-J 4 P-
P-
O P-
0 P en
e/: H-
V o P Í3 P 1 — '
CD 01 p.
0-
<J 0 cf
P-
h-i
P O u.
1 O 3 Ir*P [\
11 tr*
H-
0 P en a- ro H
F\ lí
¿3 í\
^í
» Pü
c^
tr1 H-
PJ 11-»
PJ o Po
ro
o Po f-t)
DJ ru
P
í& Q
o CD•*
Fac
tor
de c
órr
ete
fon
K;
4 4 ' í» 0 en
a.
CD5 0 P £3 O H
-P c-t
-o p 1 —
'
p- 0 j_j
Hj'
O rr O 4 v •^_
_—^>
KJ
V. . 0 p 0 1 —
1
3 O H 0 y ri*
O
. v_>
p o o £3 en 0 'i' £- P <^ P ¡_j
O 4 0 ÍD rt*
4"
o o " — ' o p O « — >
o>
0 co p *t3 4 O '^ p. 2 P^ O [—
J
p fcí 4 P"1
O rf-
H-
O P U,
CD J— '
P P-
P P'
& 0) C"t* 4 H-
P
4 Oí?\
rí-en
o
ci*
4p
-
hci
"0
0
3 0 P i O P-
P 0 en p. H-
H,
P- o
•P
-H P> 0 O P 1 —
'O & ! — '
P 4 •j
S 0 P pf
O P'
P _ 0 en CD O P1-
M,
P-
O p a 0 ¡_j o en P í-¿ o en Hj
4 O p rr P I-1
0 01 O
o "rt- 4
0) o a 0 IP
O P a1
0
P "O O fD CL n Q
O
H- I
i núm
ero
s de
est
rato
s o
cond
ucto
res
radi
ales
H O co o o o rr O 4 Q en p.
0 P a 4 P P Oí
H-
Cíl
U H- a o P P-
o rr P ^3 O H-
P cr H- p. o 0 Mj
•tí 0 o c H H- p
vn

-58-
2.- Reactancia de dispersión, del rotor referido al primario ex-
presada en-^/fase viene dado:
.XJ, =;. -p
/¿o en T.m/A.v; f en Hz; Li en m,;/\ adimencional..
3,- Control del punto de arranque.
Determinados los valores de corrientes y reactancias
.del motor en estudio; se calcula las pérdidas en el estator y ro
tor en el momento de arranque como se hizo en el numeral 3- 3» 2.
con los datos asumidos, y si al localizar las pérdidas en la
fig. 3-3) coinciden con el punto B. (error menor que el 5%) se
considera aceptable los cálculos*
Si no coinciden se hace necesario variar el cuello de
dispersión de la ranura del rotor (hd)
4 - 4 * - Construcción del lugar geométrico
l.~ Para el análisis del diagrama circular se hará en base al
circuito equivalente aproximado que resulta de la fig. 4*1 al
trasladar la derivación central a los bornes de entrada5 (para
simplificar el estudio) con el inconveniente de que la corriente
magnetizante no es nada despreciable como lo ss en los transfor-
madores,, jpor lo que el traslado incluye algunas correcciones,.
Hecho esto por todo el circuito principal circula la oii
misma corriente I'; corriente del secundarlo reducida al estator
Para encontrar gráficamente la evolución de la corrien-
te I0, al variar la carga R 1 a través del deslizamiento, (18) dic. i C ' —
bufaremos primero el diagrama de impedancia Z en función de S,
pasaremos luego por inversión geométrica al de admitancias Y = 1/2
y multiplicando estos vectores por el factor numérico U-, queda-
rán transformados en•los de corriente I'; este estudio se hará
-59-
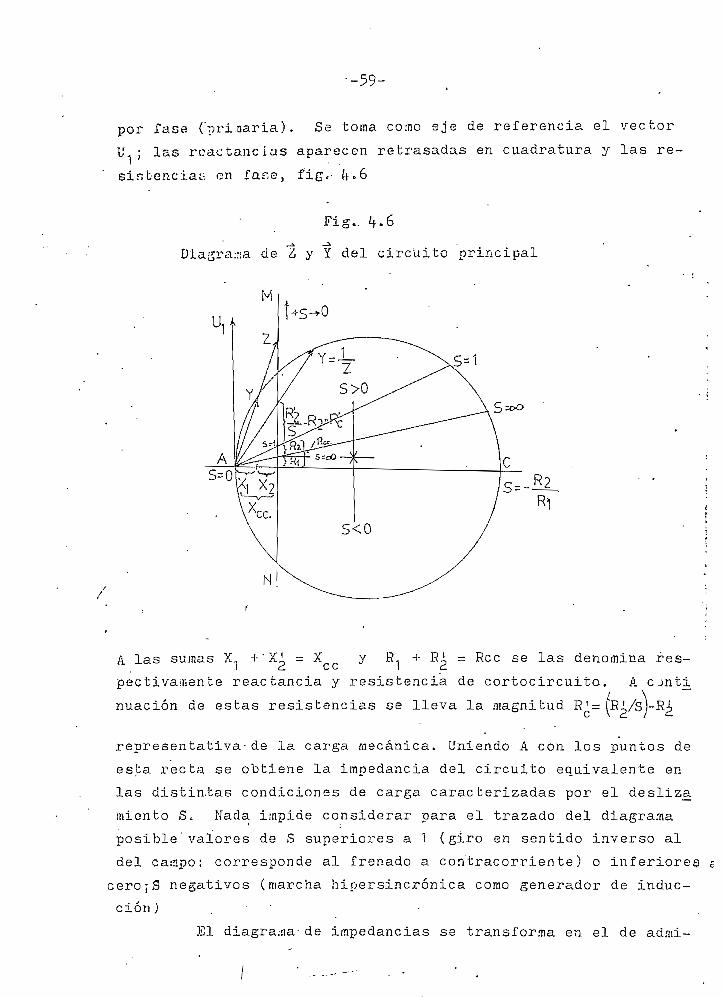
por fase Cpri.aaria). Se toma como sje de referencia el vector
U-; las reactancias aparecen retrasadas en cuadratura y las re-
sint-enciaK en far.e, fi£«- U.6
Fig.. ¿f.6
Diagrama de ¿ y Y del circuito principal
A. las sumas X- +' X' = X y R. + R' = Rcc se las denomina res-
pectivamente reactancia y resistencia de cortocircuito. A c-jntñ.
nuación de estas resistencias se lleva la magnitud R '= IRI/sl-IUL- \_ / *••—
representativa-de la carga mecánica. Uniendo A con los puntos de
esta recta se obtiene la impedancia del circuito equivalente en
las distin.tas condiciones de carga caracterizadas por el desliza
miento.S. ttada impide considerar para el trazado del diagrama
posible'valores de S superiores a 1 (giro en sentido inverso al
del cainpo: corresponde al frenado a contracorriente) o inferiores a
cerOjS negativos (marcha hipersincrónica como generador de induc-
ción) . ;
El diagrama-de impedancias se transforma en el de admi-

-60-
tancias tobando las inversas de aquellos vectores„
_A. ..>- , -. Y - 1/Z
.La inversa de la'recta MN respecto al centro As, es una circunfe-
rencia que pasa por A y de diámetro AC perpendicular a MN, según
aparece en la fig. .¿f.6 Se destacan los siguientes puntos.
a) Sincronismo: .
R' R¡ R'x\ , n - JA
S = O : '—~ =00; R = —=- - R¿s s
<7 .__ \R -f Y — f>Q Y — 1 /Z =: OV ce / -
"b) arranque o .corto circuito
R' fi' - R'S= 1 . : _ = R' R» = — - R' -= O ; R = R- +._£ = R. + R' = R '
s 2 ; c fí 2 1 g 1 a ca
.Z =\/R -i- Xcc2f = \/ 2 + X2 • = Z Y= 1/Z • = Yw V ce ce ce • ce ce
c) punto diametral,, correspondiente al de deslizamiento infinito
en un motor sin resistencia primaria (S =00 ; R, = O), .luego
R' R» ' ,'S =00: J_, o ; R¿--Í- R¿ = -R¿ /'
o ¿> f
En el motor realj el punto C se obtiene para
P ' R '2 2Q _ ^ - ^ _ Dü _ -- , -- -K-
De la circunferencia de adinitencias., multiplicando los radios_i
vectores Y por U- se pasa a los de corriente I' según aparece en
la fig. ¿1.7

-61-
Fig. ¿f.7
Diagrama circular de corrientes
Motor (0<S<1
frenado a contracorriente(S>1)'
R1
generador* asincrónico
S<0
a) Sincronismo:
S = O : I' = U- Y = U., .0 = 0 (corriente de carga nula)
"b) Arranque o corto circuito :
S. = 12¿ce
¿ce (corriente de arranque)
ce
c) Punto del infinito•
•p o. v^-rí., + A1 ce
(corriente de arranque con resistencia rotórica nula)
d) Punto diametral ;
«* -6a-
S = --!•; I¿ = UVY =. —_ = I¿cc idealIn, A
1 CC
(Corriente ideal de corto circuito con resistencias primaria y
secundaria nulas).. (I¿pfig.. 3-3)
Con el circuito equivalente aproximado esta misma cir-
cunstancia será el lugar geométrico de los extremos del vector
de corriente primaria I. , si al de la corriente secundaria re-
ducida el primario I' le sumar/ios gráficamente el de la corriente
de vacío bajo la tención U- . Para corregir en parte el error
.que se introduce al trasladar el circuito de excitación a los
bornes de entrada, conviene sustituir la corriente de vacío ci-
tada por la correspondiente a E- •
La corriente primaria se obtendrá ahora uniendo el nue-
vo origen O con los jpuntos de la circunferencia.
(A)
2.- Representación de las características del motor sobre el
diagrama circular, fig ¿f-8i
Cualquier estado de servicio de la máquina se halla re-
presentado por un punto ( B) sobre la circunferencia. Uniendo ej,
té punto con el de origen O se obtiene la corriente estatórica
I, (en amperios) en magnitud y fase. La proyección vertical de
este vector es la corriente vatiada Iw (amperios) de la .máquina
y responde a la potencia activa absorvida.
Pw = UB U, * Iw (V/); y uniendo A con cualquier punto de
la circunferencia se tiene la corriente rotórica referida.
De un nodo general, los segmentos verticales de esta
proyección multiplicados por el factor constante (m .U ) se tradu.
cen en potencias activas corno sumandos aritméticos parciales en
el proceso de transformación de la energía eléctrica en mecánica

-63-
Fig. ¿t.8
Representación de características sobre el diagrama
circular .
"O = CO
Las pérdidas por efecto JOULE en el devanado del estator
aparecen en el dia ra'.íia circular excentas del incremento debido
a la corriente' de excitación. Los valores siguientes multiplica
dos por (m U, ) expresan:
a = -,-íe
= üérdidas en el hierro (W )
•J
b = m fc. . I' = pérdida en el devanado del estator debidas a la
componente de carga rotórica (W) i
c = m JR' II = pérdida en el devanado 'rotórico
p s P = Potencia mecánica interna (W)
La potencia mecánica útil Pwvendrá disminuida en la cuan
tia de las pérdidas por rozamiento y ventilación que en sincronijs
rno requieren una corriente activa representada por e, y en el
arranque son nulas

g = Pw = Potencia útil en el eje del motor O)
(p - g) = Pínec - pérdidas mecánicas en carga (w)
(p + c) = q = P- - = Potencia transmitida, al rotor (w)1 ~£~
c/q = deslizamiento
g/p = rendimiento- aiocáaico del motor
1 =• pérdidas rotóricas en el momento de arranque
La línea de torque igual a cero es la recta AS^ y a la escala de
potencias tenemos:
q = el par útil transmitido al rotor, y también el par mecánico
total.
En nuestro diseño de r.otor jaula debido; al efecto SKIN
se produce variaciones en • la resistencia rotórica,, variando de
esta manera la corriente y consecuentemente las pérdidas, esto
hace que se tengan varios círculos desplazados en el mismo diá-
metro con inicio en el punto A; El procedimiento para determinar
el diagrama del circulo se encuentra en el Capítulo VT3 ver .ta-
bla 6.1 y Fig. 6, a

C A P I T U L O V
Ka osla capítulo al ~ratar sobre las pérdidas ¿e la ;¡iá
quina, tan sólo nos referiremos a lar; fjrmulas para su determina
clon; í-GÚn (19)
Las perdías en el hierro, se nrouucen a las variacio-
nes del flujo y se gubdividen en pérdidas por histeresis (P\ y
pérdidas por corrientes de Foucault (P,?).
Pfe = Ph + PF (w/KS) (5.D
(5.2)
(V/Ac) (5.3)
f = frecuencia (60 Ha)
li - inducción máxima eri T.
A =' espesor individual de las planchas (m:n).
PD! = P10 HD1 (BD1) • K
P!0

66-
(5.5)
yi
P = P10 y1 (B ,yi (5.6)
K = factor que considera la distribución irregular del flu
¿ o en el y u P;O y su va i or se o bt i ene de la tabla 5 -1
Tabla 5.
Factor K en función del ;iú:nero de polos
2p
Ky
k
1,3
3
U5
16
1,8
2^-
1 ,9
36
2,0

-67-
c) Pérdidas en la superficie del estator,. PVI
Estas se producen debido a la distribución irregular del flujo
en las extreinidacles.de los dientes, como lo indica la fig. ad-
yacente; la inducción real mínima ba-
jo el eje polar aproximadamente es;
• í li^yiTTF
l:'¡MI*1
P - = K-/2vi o1'5
(Kc -n
1:7>M (?) (5.7)
M
Siendo., Sn paso de ranura en mm. . ,
av, ancho medio de ranura en mmc
K j, factor de cárter y E(M, la induc-G o i*l
ción máxima (T).
¿ni(5.8)
donde K = coeficiente de pérdidas sueperficiales en Ví/cm^ y vale
2,5 para chapas de 0,5 mm.
• ¿f,.8 para chapas de 1,0 mm.
B en T; W en rpm y longitudes en mnuluego Pyl en W.
La inducción real mínima en los dientes del rotor bajo él eje p£
lar es:
n21,7 a.
(T) (5,9)
-12
.2.- Pérdidas en el rotor
Cuando el motor, funciona a1, plena carga; la frecuencia
en el rotor es pequeña; f¿ = S-f (Hz) siendo f = 60 Hz (bajo des-
•68-
onto) 0 Motivo por el cual estas pérdidas en el hierro -
son despreciables.
a)" Pérdidas en la superficie del rotors. P ?
Permutando los subíndices. ( 1 ) y (2) se obtienen las pérdidas de
esta naturaleza correspondiente .al secundario:
' / N i Ho \ , 5 • ~?rt ir /-> ¡ ' • fc> \ { *\ -* i
Pv2 = V2 - 7— (10(;nl • nl - — — .Li ( W )
unidades igual que en el cálculo de P ; siendo la inducción
real uínima en los dientes del estator bajo el eje polar:
= J£m ( el - .Bf» (T) (5.11)ni ai-
5 • 3 • - Pérdidas por efecto de pulsación - <f>
Cuando la máquina lleva ranuras en ambos órganos como
es el caso del motor de inducción, el paso de los dientes provo
ca pulsaciones del flujo principal, ocasionando pérdidas
a)' Pérdidas en los dientes del estator por pulsación .
Ppl
en Kg; ¿\n mm; N en rpm.
B . = amplitud, de la pulsación de la inducción en los dientes
del estator en -Teslas y so determina;
TI _
pl T~ ' D1 ; (T) (5.13)

2 =
. -69-
paso de ranura en el estator en ;nm.
factor de. contracción para la pulsación del rotor debida
a los dientes dol estator, y valo:
(Tí/, considera la densidad específica del hierro y su resisten-
cia; factor que está dado en la tabla 5-2
Tabla 5-2
Factor (Jw en función de espesor y pérdida de
la chapa
P1Q (W/Kg T2)
3.6
3-7
8
•
( m m )
0,5
0,35
0,75
«19, a26,1'
19,2
b) Pérdidas en los dientes del rotor por Dulsación: P _ . El calP ^ -
culo es igual que las pérdias en los dientes del1 estator sólo
cambien los subíndices 1 y 2 (todos los parámetros en las mismas
dimensiones)
La amplitud de la pulsación de la inducción en los dientes del
rotor es:
(T); (5-15)
01, factor de contracción para la pulsación del estator debida
a los dientes del rotor y-.
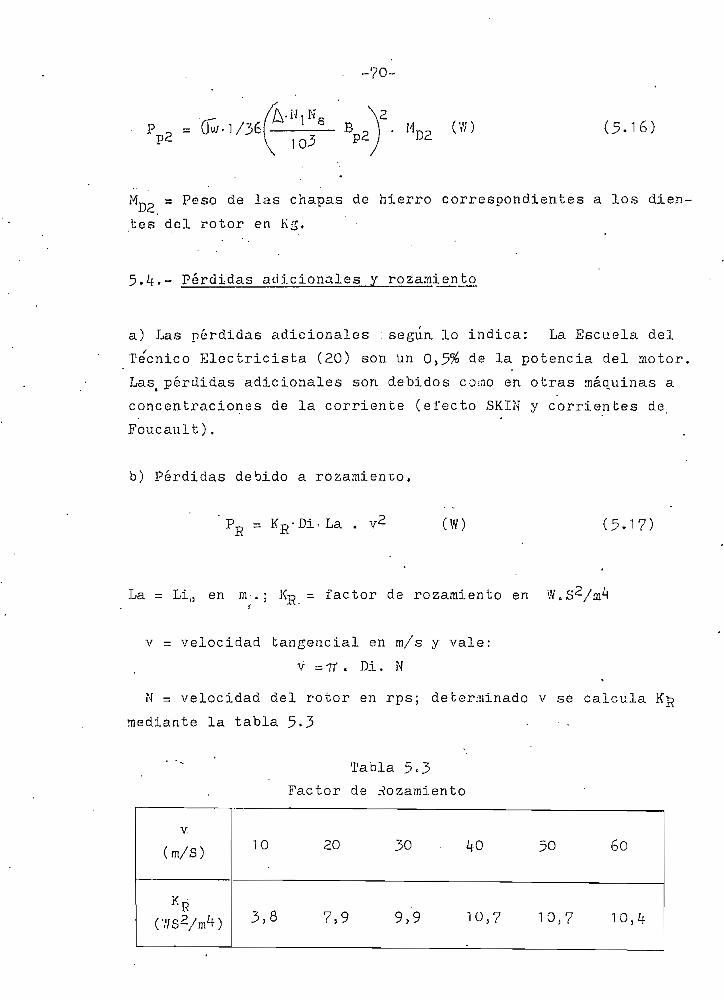
(W)
Mn = Peso de las chapas de hierro correspondientes a los dien-
tes del rotor en Kg.
5.¿f. - Pérdidas adicionales y rozamiento
a) Las pérdidas adicionales : segúa lo indica: La Escuela del
Técnico Electricista (20) son un 0,5% de la potencia del motor.
Las4 pérdidas adicionales son debidos co¡ao en otras máquinas a
concentraciones de la corriente (efecto SKIN y corrientes de
Foucault).
b) Pérdidas debido a rozamiento.
PR = KK-Di'La . v2 (W) (5-17)
La = Li, en m-.: KT? = factor de rozamiento en \VtS-«-
v = velocidad tangencial en m/s y vale:
v = 1T . Di . N
N = velocidad del rotor en rps; determinado v se calcula
mediante la tabla 5*3 • • •
Tabla 5-3
Factor de Rozamiento
V.
(m/S)
KR
(WS2/nA)
10 20 30 kO 50 60
3 3 8 7 ? 9 9,9 10,7 10 3 7 10,/t
5 - 5•- Pérdidas debido a la corriente
Al circular la -corriente por el devanado estatórieo y
conductores de la jaula, .la resistencia que presentan estos al
paso de la mis.na, ocasionan calentamiento en ellos, traduciéndo-
se en pérdidas l^R, para la máquina.
5-b.- Rendimiento
La eficiencia de la máquina -constituye la parte final
•de un buen diseño ya que ésta repercutirá en su funcionamiento y
economía. Por definición el rendimiento es la relación entre la
potencia de salida a la potencia de entrada.
Pw
Pw + ¿pérdidas (5.18)
C A P I T U L O V I
EJEMPLO DE APLICACIÓN
Como se indica en el Capitulo I.- Especificaciones; el
Motor a diseñarse será de tales características, en cjste capitulo
se realiza la descripción del cálculo del motorr siguiendo la se-
cuencia expuesta en los capítulos que precedieron,,
6/1 *- Desarrollo*
6.1 .1 Cálculo correspondiente al Capítulo II
De la tabla 2,1:^=: 8k%3. cosf = 85%
La potencia útil de la máquina
Pw = 5HP. °*7¿f6.K:*V = 3,73 KWHP.
Pw 3,73 KWDe 2.1; P = — =• ? — •
s vi /) O 3¿i . O 85f
De Z. 2.- 1T = — = 5- = 13^7 AV3 U 3 » 220
Diámetro y longitud del inducido
(2t3)5 p a 60 f = 60 . 60 g 2- . N 1.800
lss
De la fig. 2.1: Di = 137?5 mm. , usar 137 mm.
En los motores pequeños se toma 1/3 de la Potencia por polo; lue-
go de la fige 2.2 la densidad de energía, 1,6 KW . min/rn^
Obteniendo el valor de Li, de (2.¿f)3 se tiene:
Pw "' 3,73Li = « =' -J 5 _ = 0,069 m. usar 70mni,
C Di¿«. K 1,6 . (03137)¿ . 1.800
-73-
Flujo magnético y factor de bobinado
/ *•} f \— I/*^ J— 11 * ' f/ *• ( 1O R i-> n-t2,b;, p = —! = io>o cm«
Con este valor de paso polar y de la• fig. 2.5 : . •
' B¿ = 0,¿f? T' '
(2.7) (í)= Br e "Sp . Li = 0:V7 « 0,108 . 0,0? = 3555 « 10-3JT o
Número de ranuras en el estator.
De lo expuesto en 20¿f.1 escoge un valor de.
q-j = 3 ranuras/polo/fase .
(2.12) N-j = m . 2p c q-¡ = 3 . 4 . 3 = 36 ranuras
Con un acortamiento de 2 ranuras; yy = 2
Factor de bobinado; el paso polar expresado en ranuras es:
6p = —— = 9 ranuras2p k
r
el ancho de bobina acortado en ranuras:
W = D - yv = 9 - 2 = 7 ranurasa
" (2.9), fa, = sen (-— -180") = sen -L L^_c 180 ]= 0,9WE y ; 2 \ '
(2.10), fd-j = 9 /3^ - ,3 sen(90°/3 .3)
(a. 11)' "fb = o?.9 Q < o596o = 0,902
.Húmero de conduc fcores eri el estator
¿1 nú.ncro total de conductores en serie por fase se obtiene de
(2.16) '
Z = --- = . - LLL _ _ __ - 297,811 2,22 , f-(^.fb1 2:,22 . 60 . 3 ,-55 . 10" . 0,903 . :
De (2.1?) el núuiero de conductores por ranura.
21— -. a, = .297>81-., a. = 2¿i,82 a-, i -yf /•? 1 I
Tomo un valor de, a- = 2, luego-
Z = 2 ,32 . 2 = ¿ 9,63
este debe ser entero y par, luego-usar Z . = 50 conductores por
ranura. Esta aproximación de Z . no debe incluir un un error ma-
yor que el 2.4, entonces.
% error = —— ;——, 100 = 07 k%', luego esta bien
Para mantener U- constante3 al totnar Z ^ - 50, es necesario correi ni —gir el flujo y fla densidad.
"R , _ n /. n T *iy ¡-vs> „ n /i7 fnS~* ^jHf J - - e — w j *-f i -*~
W, j - = 3,52 . 10D 50
, N^3 . 1/a1 = 25 . a1 . 36/3 . l/a1 = 300 conductores
en serie or fase .
W = = 150 espiras/fase2
(2.18), V/1b = -J Zn1 = i. 50 = 25 espiras/bobina

-75-
Sección transversal del conductor; de la fig. 2.5 se determina
' _ . - _ G = A ,7 A/mm2
Conexión en Y se tiene I = I,, luego
(2.19) A1T
A1T
lLÍ-= 2,92 mm¿
2,92 _ " I ,¿í6
2 . b
b/1
2 •
3
/ 2\lc(mm )
1 ,.46
0,73
0,íf9
d ( r am)
1,37
0,97
0,79
Con b- = 2; d- ~ O ,.97' determina de la tabla 2*3 el cali-
bre de conductor esmaltado^ más próximo a este diámetro y corres-
ponde al alambre esmaltado, calibre # 18 con diámetro desnudo de
1 j02¿f ram y con esmalte de 1 }.062 mrn con una área de 0^8232 ¡nm
Con este diámetro de conductor calibre 18 se tiene finalmente:
A1T = A1c ' al * bl = 0,8232 , 2 . 2 = 3-29mm2
La altura de cobre efectiva.
Ah - = 3——^cul ir . DÍ
1T , 300 . 35293 » -— — • - ~ — -
ir . 137 •oo88 ram.
Sol.2.- Cálculo correspondiente al Capítulo III
De
-76-
3 * 3
^ De ( 3 * 3 ) el área de ranura del estator concH - 0 ,^3 es
. 25 * 3,29/2 . t/o,¿i5
Altura de La ranura;
AR1 - (hD1 - h¿|_) , ( a M 1 ) , ver fifí. (3.D
-ae*-,-
Los pasos de ranura en el cuello; medio y fondo son
TÍ.(DÍ 4- 2(h3 + h^-)) _ rrd37 + 2(0,3 + 0 ))3o
TT (Di + hD1) ir (137 + 23) ,,GM1 " --- ' -- ' - '" '4yU J : ' IsT "Z N 3o
36

-77-
El ancho del diente en su parte media será
M1
Cotilo b = b.., = .-b , - ' = -~b entonces
ac1 = Sc1 - bDl = 1 2 > 1 0 ~ 5'5 = 6 'S Hm
7* "K _ 1 í^ n ^ ^ — i n ' ñ f n T iF1 ~ í"! ~ Bl " ' ~ ^*^ ~ l v , j uidi.
(3.A-); cu = cu + 2/3 ; para motores pequeños se escoge el signo~ ¿ i
menos : q? = 3 - 2/3 = 7/3
De (3-5) N = 3 . 2p • q2 •= 3 • *f • 7/3 = 28 ranuras
Pero este número de ranuras es inadmisible por lo expuesto en el
subtema 3*3) luego escogo un número de ranuras más cercano al.caj.
.culado.y que cumpla las condiciones de 3-3
Entonces, se elige, según lo anota (21) para un número
de 36 ranuras en el estator un aúmero conveniente de ranuras en -
el rotor de: • >í = 30 ranuras
Para este número de ranuras el nuevo q es;
N2 30 5
3 . 2p 3 • *t 2
el diámetro del rotor:
dp = Di - 2 <£ = 137 - 2(0,35) = 136,3 mm.
Be (3«6) el paso de'ranura del rotord
~~7 — . • — ^ ~ i ¿i 2V inm°n2 > r - ?n ~ ?2 • 30
Barras y anillos de la jaula.-
Se escoge un 57% de sección de cobre en el rotor respecto a la del\r esto equivale a, tomar - de (3-7) :

-78-
h . = 0.57 h , = 0,57(6,88) = 3,92 mm.cu2 J cul ' '
(3'8) Acub = hcu2 «£n2 = 5>9? " '2? = 55'9'6 m'"2
De 3.9, y a 75 "C se tiene
Ab = Ac t i b ' . .(Tcu/tfAl = 55,96 , 46/27 = 95,1 mm2
que es aproximadamente igual al área de la ranura del rotor
(fig. 3*5) se toma esta área definitiva: Ab = 95? 1 mm2
La sección del anillo de (3»10)
A = qQ o Ab = 5/2 . 95,1 - 237,7 mm2a ¿_ i
—X ' ' 2^Éscogo) anillos de b „ a = 10 t 24 = 240 mm • (fig 3.2)
(3-11) D = D± - 2 ( o+ h^)
D^ = 137 ~ 2(0,35 + 0,5) - 13553 mm
El -diámetro medio del anillo ( f ig 3 -2 )
MaD = D "" a " 135)3 - 24 - 111,3 mm
El largo de la barra del rotor es: (3.14)
lb =' la H- 2(10. .,15% La)
lb = 70 + 14 = 84 mm.
De (3*13) y a 20 °C
4. a v4- a = KAb Ab 2TÍP2. Aa
„ 1 /0-? 07 K + 0,084 - 0,07 + 30 • 0,1113
33 \95,l r 95,1 2 TT. 22. 240
= (2;23 1C + 0,45 + 1,68)-10-5
-79-
R2J b + a =• (2,23 Kr + 2,13) 10"5
La resistencia del rotor por fase.
.(3-15); K2 = 30/3 .-(2',23 Kr + 2,13).10-
R2 = (0,22 Kp + 0,21) 10~5 /fase
Para determinar K es necesario encontrar el valor de JR - median-
te las pérdidas en el momento de arranque. Para este diseño
Clase A. se toman los siguientes valores respecto a los nominales
(3,16) ; Ta = 1,3 TN y Ia = 5IN = 5 o 13,7 - 68;5 A.
Asumo; I = 5A.; valor que será corregido ó comprobado en el con-
trol del punto de arranque; 6,1«3
La resistencia del cobre del estator a 20°C
1 Lcl • wiR1 =-= . 2 L /fase
donde L . longitud total de un lado de' bobina: L . = L + L -el el a si
L - = longitud de la cabeza de bobina del estator y en funcións idel paso polar y paso de bobina relativo, dado en ranuras aproxi-
imadamente vale; ¡
-7 /Wa \L . = 1,76^—^-4= 1,7 . 108 (7/9) = HiS?8 usar 1/fO'mm.s i " \/___ i i
L - = ?0 + lij-0 = 210 mm.
- . 2 Q > 2 1 0 . 130•3 ,29
Las pérdidas en el estator de (3317)
P1a = 3R1l = 3 . 0,3¿f . (6855) = ¿f ;79 KW

-80-
2a - 1,3 (3,73) = ¿t,85 KW
KW
Se escoge una eecala de corriente rn-j. = 5 A/cm; luego la de poten-
cia resulta:
220 V . 5 A/cm = 1 , 9 KW/cm,
Al graficar estos valores como lo indica la fig 3.3 se tiene,
Fig 6.1
Determinación de la Corriente Rotórica
O • A
AB = I' ' = 12, 8 pm . 5 Á/cm = 6i f . A2a
AC = Irf> = I3 ,7cm * 5 A/cm = 69,3 A
-ii

-81-
T..De (3-20) 3H < * ) 2 ^'
X1 ¡ Xp ; X., ; son valores que se comprobarán en el control del
punto de arranque: 6.1-3
Asumo X = q,9a/fase;- I = . 5 A
(3.33) X .
(3.22) u = _ . _ = -^- . > _ , ^ ^ 2&2Y3 x . . - f 30/3 2¿f,5
(3.21), • R - = 1/u2 R = l/(28?05) . 0,40 = 0,.
Igualando las ecuaciones (3*15) y (3=21):
1 x -2(0},22 Kr + 0,ai) 10" = 0351 . 10--2; resulta Kp = 1 , 36 ; con este
valor y de la fig 3-^ se tiene h1 = 1,^1
(3 ,25) , fc= h l ; i / Z^ ; y a 20 D C
h - 1.5Í\. 60 . ¿I.TÍ. 10-7 . 33
= 17,09 ram.; usar 17,5 mm.
Se escoge h¿ = o,5 mm, y hy = 1,5 mm-
Luego hp = h - hv = 16 mra.

-82-
Di.'.iensloiu.s de la ranura rotórica fig 3*5
hD2 = h •»• hd = 17,5 + 0,5 = 18 ram
d .= 136.3 mm.r *
el ancho dsl diente es -constante b = b = b = b = 6>5 mm .
Según fi£ 3*5•el ancho de ranura'resulta al restar al paso polar
respectivo el ancho del diente:
aF2 = F2 - bD2 = 10>5 - 6,5 = ¿f,0 mm.
aM2 = ¿"M2 " bD2 = 12)¿f " 6 )5 = 5'9 mnu •
a = - b - ^ 9 - 6 5 = 7 4 mau
FMM. en el entrehierro~r
Factor de Cárter, de (3-2?) K =.cs
para las ranuras en el estator (considerando rotor liso)
a _^ -j o cr
751¿f de la Tig 3.6 o (tabla): y = Có 0,35
12 - 0,591(2,5)
para el rotor: (considerando estator liso)
= ¿t-,29 í entonces y = 0,¿f65¿ O ,.35
1 / t3 *~7
K p = - —— = 1,05 , y en conjunto el factorc¿ 1¿f}27 - 0,¿f65 (1 ,5 )
d e Cárter: K - ¡ = K , . K - = 1 J 1 ¿ f . 1 .05 = 1 , 2c el c2 J ' '
T = Ó566T
(3.2G). 0,35 * 1,2 = 0,42 mm.
La" FMM en el entrehierro, de (3-29)
' = _ °*66 0,42 < io~3 = aao.,6 A
FMM en los dientes.
a.) Sin ranuras de ventilación L = Li de (3-30), la densidad de
flujo en el diente del estator;
B Be =óil 0;93
. 0;66 =:" l,
Con este valor de densidad de flujo y de la fig 3<-7 se determina
la intensidad de campo H
(3-3O V = H . h
,.- i-l A.v/cm. y:
2,3 = 9¿f;3 A-v
b) En el rotor se tiene al igual que en el estator una densidad
del flujo constante ya que el ancho del diente no varía; luego
o;66 =
Con
luego,
0,93 .
= 1 3 56T se tiene H- = 43 A.v/cm1
FMM. en los yugos
a) Escogo según .(3-3¿i) una altura del yugo igual para estator y
rotor h - = h „ = 0,2 "Sp = 21,6 mm. usar 18 mmyi y2- - J * J
•(305) B ,yl K- Le yi .
.108
2 ..0,93.,521' ó (15*200 Causes)
De la fio 3-7: H , = 33 A-v/cm^
Paso polar del yuso del estator
137 + 2(23)108
Di 137mffl.
05125; con este valor y como parámetro.
B y de la fig 3.8: Ky1 = 0,3
(3ó:6); Vyl Hyl Ky1 5yl 33 . 0,3 = 71,4 A-v
b) Para el rotor se sigue igual procedimiento que para el estator
para determinar la F'MM.
h = 18 mm B - = B ? = 1 ,52T entonces de la fig 3.7 H ? = 33A-v/cmy(— j' y *— j -
el paso polar en el yugo del rotor en mm.
Di 137
18 ..= 0,23 , luego de fig.3.8,/K79, 1
la FMM.en el yugo del rotor: V H K . "Sy2
i 33- 0,25 . 7,91 - 33,6 A-v
Corrección de FMM -: dientes y entrehierro

(3.38)3 « =--£i-J!_ = ™>> + "»*.s o,78Vj . 220,6
Con este factor do saturación 0,78 y de la fig 3>9 (curva puntea-
da) se determina el factor de formaos ~ 1,36 ya que el valor de
c¿~ 1 ,4 de (3.23) era provisional; entonces ¿s/^ - 1 ,36/1 ,'4 - 0,971
Corrección:
V¿ = 220,6 . 0,971 = 214,2 A-v
BDI = 1,.55T . 0,971 = l , 5 T T ; Hj¡)1 = 34 A-v/cm
•BD2"= 1 '56T * °=971 = 1?32T ; HD2 =. 36 A.v/cm
V_, =: 78,2 Av ; Vn? = 6458 A.v .
Comprobación:
K - 75,2 + 64,8 = Q^ '
.Luego se toma como factor de forma finales =• 1,36. La densidad
en los dientes es correcta, ya que, es menor a lo especificado en-
3<5.- a): No mayor a 1,53T. La FMM total por polo es: (3.39)
V = V f + V • -t- V,x + V , + V = 21 ¿í- 2 + 78 2 + &L fi + 71 L -i- ^P f>rn A TlT TÜP "vrT \ 2 — * — • ' " ) ' — i 1 - ' , 1 — ' WT- j w * ( ' j ^ ~ r _^íí— j ^
V^ == 461,2 A.v
'6.1,3 Cálculo correspondiente al Capítulo IV
x, = 6 Wl fb ' f:- 6 (- Q)e - (Q?902)2 ,.60 . 3.32
P-V a . 461,2
Xíf =Í'I
Reactancia del estator; de (if.3)

. -86
1,36
De la tabla ¿f.l sé determina el factor de dispersión doblemente
concatenado-para ql = 3r./ yv = 2
(Tal = 1 , 1 1 , lo"2
En nuestro diseño se tiene inclinación de las ranuras sólo en el
rotor, entonces se tiene;
(Til -(Ti2 = O30ít575 Vq - 030/fr575 V32 - 0,51 . 10'
Este factor de dispersión con respecto al factor de inclinación
se da así "(Ti = 1 - f . ; en donde f. es el :
vale; f.. = 1 - (Ti =. 1 - 0,0051 = 0,995
se da así "(Ti = 1 - f . ; en donde f. es el factor de inclinación
De las dimensiones de la ranura estatórica fig 3-1; y de la
fig ¿f./f con W/5p = 7/9 = 0,79 se obtiene K = 0,83 ; y K = "0?571 c - a
entonces: (¿f.65 hD1 „ h,, /dp ' ?h^ h/,~\ - •U' ^ K +/ _ =— + ¿ _ H- __L_ARI -- r - -' ]c +
3 . ari \ - a - +a . a .- G ' \ c 1 c 1 s 1 si
. 0,83 -. - > + - i - 5 7 = 1,233 . 6,6 \p,6
(¿f.7) Acl = 0,075 (1 + Lsl/£p ) = 0,075 (1 + 1¿¡.0/108) = 0,17
De (íf.8) la permeancia total del estator;
q^ LÍ LÍ
=: 1,23/3 + 0,17 * HO/70 + ¿f139¿f (0:902)2 (.1,11 + 0,51)

-87-
De (¿f.9) X- = UTíM'- f - W-i1 p '
= krr. ¿f íT, 10~7 . 60 . 0,07/2 (150)2 . 1 , 3 =
Reactancia del rotor referida, X^
De lo expuesto en oí subteiía 4-3; se tiene 4o2 = / lol =,
El Tactor de dispornión doblemente concatenado de la tabla
para q = 5/2 : (TsE = 1,3 . 10~2
p hv hd \De ( 4 , 1 1 ) RZ — - -^ - JL_+_d^\e la fig ¿f.p; con íí = 1 >53 y 0= 1 : = °?B8
)R2 =^ 16 + - 1 _ - .+ 0»
\ • 7,¿f. 3 . 1,5 . 1,5
Se escoge el valor de permeancia específica de cabeza de bobina
del rotor ; c2 = 0310
La longitud media de las líneas de inducción en la corona del ro-
tor esta determinada por:
L = (DÍ - D 2 - ^ y a ) r r _ (137 - 1
*te" . De (¿I-.12) la permeancia total del rotor
A /lR2 ,2 ^2 ~\ ^ . - -2 t>s2 , \ «,2 /rT,o ^./f-í^^/ \» „ uve. _p -, í_ ^^ 4. A r P T n + / 'O¿ . ib IU Z¿ + U T _ ¿ )/ \^ — 1 U- • ' T^ > V. C_ — W _ wi_ • J. - \ > _ y
q. • 1 Lí ' Li
UK = 1 ?¿1 (0,902)2' + 0^0(0,902)2 .
5/2 70
= 1,10
(¿f -13) ; X i =

X < = ¿fir . '4TT * 10"? . 60 .-0'07 - O50)2 c 1 , 1 1 = 0,82.n/fase¿ . • a
Control de! punto de arranque.
Con los valores finales de -reactancias determinados; se calculan
los valoree definitivos de corriente y con ello las pérdidas enf ~
el momento de arranque,, para asa.,, verificar el punto de arranque
en la i'ig 6.1 ;
X1 + X^f^ ; XM.fi = 25,15 * 0,995 =
0,97 + 25 = 25,97^/fase
üi i pv
u
La corriente ideal dé cortocircuito, (arranque)
I. - . - ; X. = reactancia de cortocircuito idealla J la
.la . •
X-' Xtf.fi2
:. = -L£í—= 72,16 Axa . n/-
X,- = 0,83 + 35 = 25>82-a/fase
- ¿ f > 3 9 ) A = 67'27 A
P1a = 3 R1 (If ;) = 3 . 053¿f c (67S27) - ¿*>6o KW
La relación de transformación- definitiva es:
u - 6'Wl fb l x n . _ 6 , 150 > o;9oa 25,97u- — a - — , — • - , - — — -- . „ - =
N xM f 30 25,
y
• -89-
P2a = 3R2a (I*a)2 = 3 ' °'52 ' 10~3 ' (28>10>2 • (67, 27)2=5, 57KW
P. . = íf,60. + 5,57 = 10-.17 KW.¿- j "• .
Al grafioar esta potencia en la fig 6.1 a igual escala (1,9 KW/cm)
corta al arco de corriente de arranque, en él punto B1 ; que es
muy próximo a 2¡ por lo que el error es pequeño ( 'tienor a y/o es
aceptable) luego no se hace ningún ca::ibio.
6. 1 *¿f Cálculo correspondiente al Capitulo V.- Pérdidas
1.- a) Pérdidas en el diente del estator, de (5-^)
P D 1 .= P1Q .. MD1 (BD 1)2 . K
W 'P i n ' = 3 ; 6 - - • (Chacas 0,5 m:n. )U - Kg.T2
MD1
/t (Di + HhD 1) - TTA Bi2 - h^.aM^NT (kg)
= 7,8 o 10"6 . 0,93 . 70 (n (170+2U3))2 - TÍA (137)2- 33 . 3,5 . 36
= 12,63 Kg.
- 3,6 . 12,63 * (1 3 5D 2 . 1 S 3 W 13^,77 W
1„- b) Pérdidas en el yugo del estator, de (5-6)
P -P M Í P i ^ " ) vyl " F10 ' yl .' ( h ^ } ' ivy
K se obtiene de la tabla 5 - 1 ; para lf polos K =1,3j j

-90-
M
l\yl
= 7,8 . 10~6 . 0,93 . 70 . TTA ((219)2 - (219 - 36)2) = 5,77 Kg.
Pyl = 3,6 , 5,77 ./
1,3 =/62,39
1.- c) Pérdidas en la superficie del estator, De (5»9)
•i-, oJ jTn2 (K_c2. -
1 7 ^1 > » &M-
* Be,,1,7 . 5,9
(5.8); PKo
vi/lo.(10 . Li
para chapas galga // 26; Ko ~ 2,.5 V,'/cnr~ (Subtema
PVi 10 12LÍO ,07
= 1.6,82 V/
»- a) Pérdidas en . la superficie del ro tor> De (5.
(KC1
1,7 . 8,5-. 0,66T = 0,077T

tifc -91
De (5-10) . ;
v¿10
• °n1-' '
= 2.5/36 - - 1 8 0 0 V^. ( 1 Q ; 12 ^ Oj077)2
3*- Pérdidas por e fec to de pulsación
3/1) De (5.
5 + a
_' 0,5/0,35)2 _ 1)98
5 + 1,5/0,35
De (5 -13)
2-7 .bn iDI 2 o 12
De la tabla 5-2 para chapas de espesor 0,5 mrn.5- y P = 3?6 V//Kg-T2
se tiene Ow= 19?2
(5.12)2
,pl
. B
19,2 .-1- ( 0 , 536
36V 103
.30 . 1.800
P1
10312,63 4 9,5 W
3.2) Pérdidas'en"los dientes del rotor por efecto de pulsación.

-92-
(2,5/0,
/
B = ) * ? , 1,52 = 0,078 T"
El peso del hierro correspondiente a los dientes del rotor:
MD2 = Ke * Li (/¿f D± " hD2 * aM2 ' N2}
M = 7,8 . 10"6 . 0,93 - 70 ( A O37)2 - 18 . 5,9 . 30) = 5:86Kg
(5.16) P
= 19,2 . 1/36 (055 .- ' ' , 0?0783 . 5,86
=/ 20,11 W
¿f.- Pérdidas adicionales y de Rozamiento.,
Al final de este cálculo.se tiene un deslizamiento para carga no-
minal de = ¿f,3% entonces:
N = H .(i - S) = 1.800 (1 - 050¿(3)o
N = 1.722 rpai = 28j7 rps.
La velocidad tangencial esta dada por:
v =TrDi.N =TT. 0,137 . 28,7 = 12,3¿f m/s
Con este valor y de la tabla 5-3; K^ = ¿f 6 ÍV/. s2/ )K \
-93-"
(5.17) .Pp = KR . Di . La . v2
P« - 4,6 . 0,137 ,"0,07-. (12,34)2 = 6>72 W£\s pérdidas adicionales equivalen a 0,5% de la potencia efectiva
* P , = 0,005 . 3,73 =13,65 Wact . /
5.- Pérdidas debido a las corrientes
Bel diagrama del círculo fig 6.2, se obtiene" la corriente del es-
tator y rotor para operación nominal, que corresponde al punto B.
• ' IN1 = 13,7 A y I¿2 = 11,5 A_±> .**
5*1) Pérdidas en el devanado estatórico: (valor de resistencia,
a 20*0)•
5-2) Pérdidas en el rotor. ( resistencia a 20DC; (3- 21 ))
P = 3u2 . R (!' )2 - 3 , (28,10) , 0,51 t 10~3 9 (li 5)2
,_ = 166,72 W*
6.- Rendimiento,
Pw
Pv/ -í- ¿pérdidas
r t = P + P + P H - P + P + Pfe - ^Dl + *Vl vi H ^vZ + pl +
= 134 ,77 '+ 62,39 + 16;82 + 47,45 + 9,5 -+ 20,11
= 29130¿f W
PfQ
+ 166,72. + 291,0¿i- -i- 6,72 + 18,65 =
3(5 1A) 7? - - - = Oj35 s valor correcto; éste no debe
í - "3-730 + 67¿u57 - '
ser ;nenor al especificado en la tabla 2.1 (pág. #5). En la ta-
bla 6.3 se indica valores de rendimiento y factor de potencia a
distintas cargas de la máquina, en la obtención de estos valores
se hace aproxi.nada.7ien te ; el hecho de considerar constante las
pérdidas en el hierro, rozamiento y ' adicionales y sólo variar las
pérdidas debidas a corrientes en el primario y secundario, luego
es un motor en los cuales predomina las -pérdidas dependientes de
la carga. El deslizamiento a carga nominal esta dado:
PPS = , - ± - . - P = 166-72 .W
P . + P0•eje- 2
peje = Pv/ + PR = 3t?3° + 6'72 " 3736,72 W
S =
Corriente en vacio lo;
"lo = Ai2 -i- if\ Fe
I = Corriente magnetizante; (¿f,89 A)
!„ = Corriente, debida a pérdidas en el hierro y rozamiento.
T Pérd. total del núcleo + Pórd. f.w. -t- Pérd. estator debido aJ. r>, : . ,Fe ~ni , U-

-95-
T - ¿91->04 * 6,7¿ * ¿i>99 _ o 8 AFe '6 3 . 12?
lo =WU,39)2 + (0,8)2 =
6.1.5»- Construcción del lugar geométrico
Con lo expuesto en el subterna ¿f.¿f y con los valores de la tabla 6.1
se puede realizar la construcción del lugar geométrico; fig 6.2
El procedimiento de cálculo para obtener los datos de la tabla
6.1; por ejemplo, para deslizamiento S cualquiera:
De (3,25) h' =
w = fí 4V ; VV = velocidad angular sincrónicas s
. h, =V
Luego h r es Tunción variable del deslizamiento, y en función de
la altura aparente en el momento de arranque vale:
(S) =
Con este valor de h' (S) y de la fig 4.5 se obtiene el Ki (fí)
h 1 \De (/f.11 ) K = - — + - lü_+ _Il\i (S)
Con este valor y con (¿f«12) se determina
(S) = I S ) f 2 + constanteoí
De (4 .13) X¿ (S) = íf.TF//cr- f -íi V / 2 l a (S) -"-/fase

, -96-
La reactancia ideal al deslizamiento S es:
¿ ( <z\ M i rX. (S) := X + ^ v ; - - =: -^-/lase; luego la corriente ideal-L ¡ . Y
. ' • . . . - . 2 2
U-, 'I. (S) = - , entonces Icp(B) = I- (5) - lo; Esta corriente"- .X± (S) 7 -.
sirve para determinar las pérdidas en estator y rotor a ese des-
lizamiento .
Con h'(S) y de la fi£ 3 4 se obtiene K (S), y de 3*15:
R (S) = (0?aa Kr(S) + 0,21)
• R(S) - u2 R
Pérdidas en. estator y rotor
= 3 I(S) (W)
P2(S) = 3 R¿ (S)
Quedan así determinados los valores de la tabla 6.1 para cualquier
deslizamiento.
Las escalas para el diagrama del círculo son:
Corriente: mT = 5 A/cra ; Potencia: m = 1,9 KW/cm y la de Torque
•z mP -7 1 -900 -,-,,„ / 'm = 3 „ - £- = 3 * - - - = lpj'12 N.m/cm1 2iíf 2.TT- 60
Para determinar algún valor de corriente, potencia y torque del
diagrama circular fig 6.2 es necesario multiplicar la longitud c_o
rrespondicnte por la escala adecuada.
Para trazar el diagrama de la fig 6.23 se usan los datos de la ta
bla 6*1; a su escala conveniente, así, desde el punto O; localiza-
mos la corriente de magnetización lu(OY'). La magnitud ÍA repre-senta las pérdidas totales en el hierro de la máquina.
-97-
Desde A se traza la recta AX cuya inclinación es
R-, " • &i n r¿.tga^-o^ '¿ — -' =$> í -h- = 200 . —i- = 200 U)^H = 2,6 mn
X . X 25í97
Lint a inclinación se debe a que en este diagrama del circulo que
corresponde .al de Ossanna incluye la resistencia del arrollamien-
to -del estator, mientras que, en el diagrama de Heyland no la
incluye.
Esta recta AX es la base de los semicírculos desplazados a par-
tir del punto A; para los diferentes deslizamientos.
Para cada deslizamiento se obtiene un punto de las curvas de co-
rriente, potencia y torque. Se indica el procedimiento a seguirse
para encontrar dichos puntos, por ejemplo para el deslizamiento"
S = 2; se levanta una perpendicular a AX en el punto M, y tangen-
te al círculo S • La longitud KH es P. ( S ) pérdidas en estator a
deslizamientos^ -2; NQ expresa Pp(Sp)/S • y ÑP representa: Pp(Sp);
' La recta QA corta al circulo Sp en el punto S que es un punto de
la curva de corriente. La recta perpendicular a AX que pase por S
corta a las rectas AR y AH en los puntos U y V que son puntos de
las curvas de potencia y torque respectivamente; este procedirnien
to se sigue para cualquier deslizamiento y se determinan asi las
curvas -de funcionamiento de la máquina.
Punto nominal ( f ig 6,2 punto B. )
Corriente nominal: OB = 13)7 A, __ .
Corriente rotórica: AB = 11 , 5 A '
Potencia nominal: BI = 2,1cm . m = 3599 KW- • ir
Torque nominal: BT - 2,2cm . m^ = 33526 W.m
cos¿jp= 0,87
El valor de torque máximo: CD se determina al trazar una tangente
on la curva de c-orriente paralela a la recta de torque igual a c_e
ro (linea de torque trazada a deslizamiento igual a cero)
"MAX a • m'J? = 5)¿1 * mT =

Punto de arranque (fig 6.2.- punto L)
Torque de arranque; T = LP , ra;n = 39)31 N.m3. . i.
TLuego: •—— = - J = 1,2 ; relación muy próxima a la tomada en
TN 3íf,02I
el subtema (3*-16)
Corriente de arranque:
I' = OL . mT = 13*5 cm . mT = 67,5 Aa i j-
Ta _ 67;5 = ¿ij9 ; relación aproximada a la tomada en el sub-iM 13,7tema (3-16) que definen la clase de diseño.
"£*• Las curvas de torque y corriente en función de deslizamiento ta-
bla 6.2 y fig 6.3 se determinan a partir del diagrama del círcu-
lo fig 6,2 -
Las curvas de rendimiento y factor de potencia fig 6«¿t y tabla 6.3
se calcula del diagrama del círculo, a partir de los puntos E> Fj
G y B que corresponden a las potencias de 1 /¿t ; 1/2 ; 3/A ; y.1*
veces de la potencia nominal, se determina el factor de potencia,
y para el rendimiento consideramos sólo variables las pérdidas d_e
bidas a corrientes del estator y rotor: las demás constantes.
Por ejemplo para determinar el factor de potencia a car;
ga nominal del diagrama del circulo se traza una recta desde el'V
•punto O que pase por B y corta en J con el arco de- longitud igual
a una unidad (OH)j, luego una perpendicular a OH desde O" corta en
el. punto K, correspondiente a un factor de potencia: OaS7
Para determinar'el eos <pmáximo; desde O se traza una
tangente a la curva de corriente, 'siguiendo igual procedimiento
anterior se tiene eos¿Pmáximo de 0,88
6.2.- Conclusiones.-
^ Como anotan algunos autores sobre esta materia, pese a
& • -99-
su laboriosa racionalización, - no es todavía una ciencia exacta-
y se hace necesario una amplia experiencia y conocimiento en la
materia1 y construcción para llegar a resultados óptimos,
C;n este diseño 'al comprobar algunas características que
se obtienen del diagrama del círculo podemos apreciar que aque- -
lias no ccincid.cn exactamente pero se tienen valores muy próximos.
^ El valor de la potencia nominal como se ve no coincide
(3373 KV/); al igual que la relación del torque de arranque respejc
to.al nominal que debe ser de: 1}3; y de la corriente de arranque
que es de 6?;5 A (debería ser de 5 veces la corriente nominal:
68,5 A), estas pequeñas variaciones se deben principalmente a que
en el desarrollo del cálculo; se asumen datos que están por supues_
to dentro de ciertos límites pero que el valor elegido no resulta
. ser precisamente el óptimo.
Además se debe tener en -cuenta la aproximación realiza-
"*'' . da en determinados cálculos, apreciación en los gráficos y demás
aspectos que influyen en el diseño; en el desarrollo de éste,, se
encuentra con una variedad de parámetros; :.a los cuales es necesa-
rio combinarles en tal forma de manera que se. obtenga un valor
adecuado para un buen diseño; debido a que algunos parámetros de
la máquina son bastante sensibles a la variación de algún dato,
no así otros, 5ero que en el cálculo posterior se nota su influen
cía.
Es por esto que para obtener un diseño con buenos resul
tadoSj se hace necesario hacer un cálculo de optimizac-ión y quiza
*.,. la construcción de la máquina misma; entonces sugeriría como la
-continuación de este trabajo realizar: la optimización y. constru£
cióa del motor.
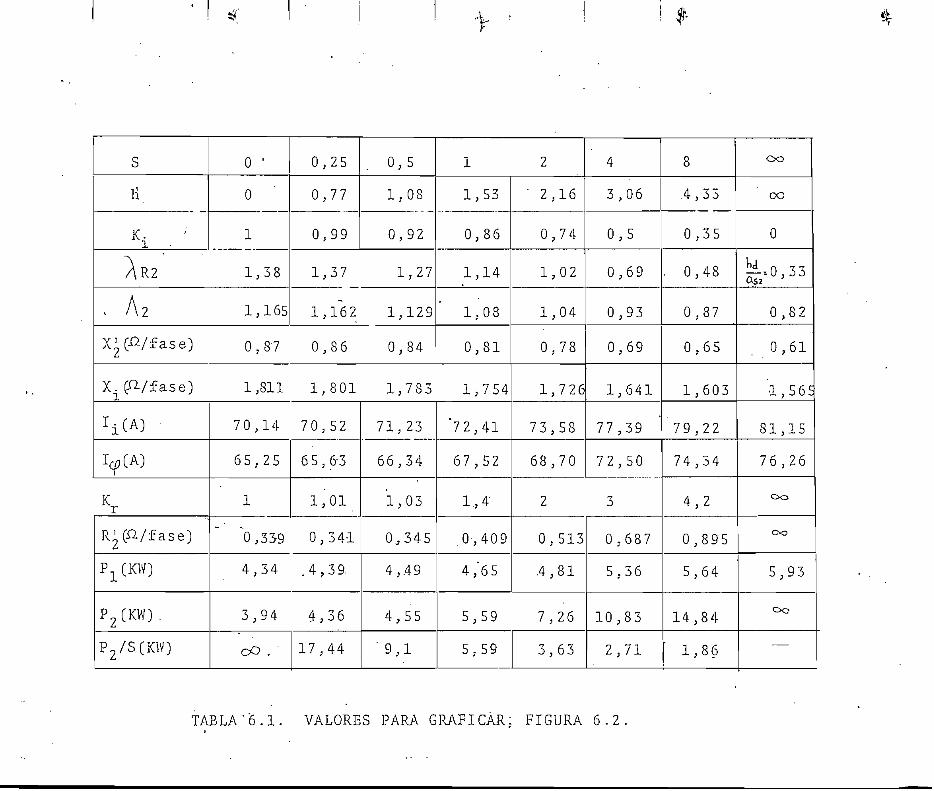
s •Ü.
'
• K
i • ;
AR
2
. A2
X^C
-a/f
ase)
X.
(a/f
ase
)
Ti(
A)
-
y A)
K r
R'
(.a
/fa
se)
¿
P1C
K1V
)
P2
(KW
).
P2/S
CJC
W)
0 '
0 1 1,3
8
1,1
65
0,8
7
1,81
1
70
,14
65
,25
1 "0,3
39
4,3
4
3,9
4
00 .
0,2
5
0,7
7
0,9
9
1,3
7
1,16
2
0,8
6
1,8
01
70
,52
65
,6-3
1,0
1
0,5
41
.4,3
9.
4,3
6
17
,44
0,5
1,0
8
0,9
2
1,2
7
1,1
29
0,8
4
1,7
83
71
,23
66
,34
1,0
3
0^
34
5
4,.
49
4,5
5
"9
,1
1 1,5
3
0,8
6
1,14
1,0
8
0,8
1
1,7
54
"72
,41
67
,52
1,4
.0-;
40
9
4 ,"6
5
5,5
9
5,5
9
2
' 2
,16
0,7
4
1,0
2
1,0
4
0,7
8
1,7
26
73
,58
68
,70
2 0,5
13
.4,8
1
7,2
6
3, 6
3
4 3,0
6
0,5
0,6
9
0;9
3
0,6
9
1,6
41
77
,39
72
,50
3 0.6
87
5.3
6
10
,83
2,7
1
8 .4,
33
053
5
- 0
,4S
0,8
7
0,6
5
1,6
03
79
,22
74
,54
4,2
0,8
95
5?6
4
14
,84
1,8
6
00 co 0
bL
o,3
30-
S2
'
0,8
2
. 0
36
1
•1
565
81
,15
76
,26
00
co
5,9
3
00 —
TABLA "6.1. VALORES PARA GRAFI CAR; FIGURA 6.2.
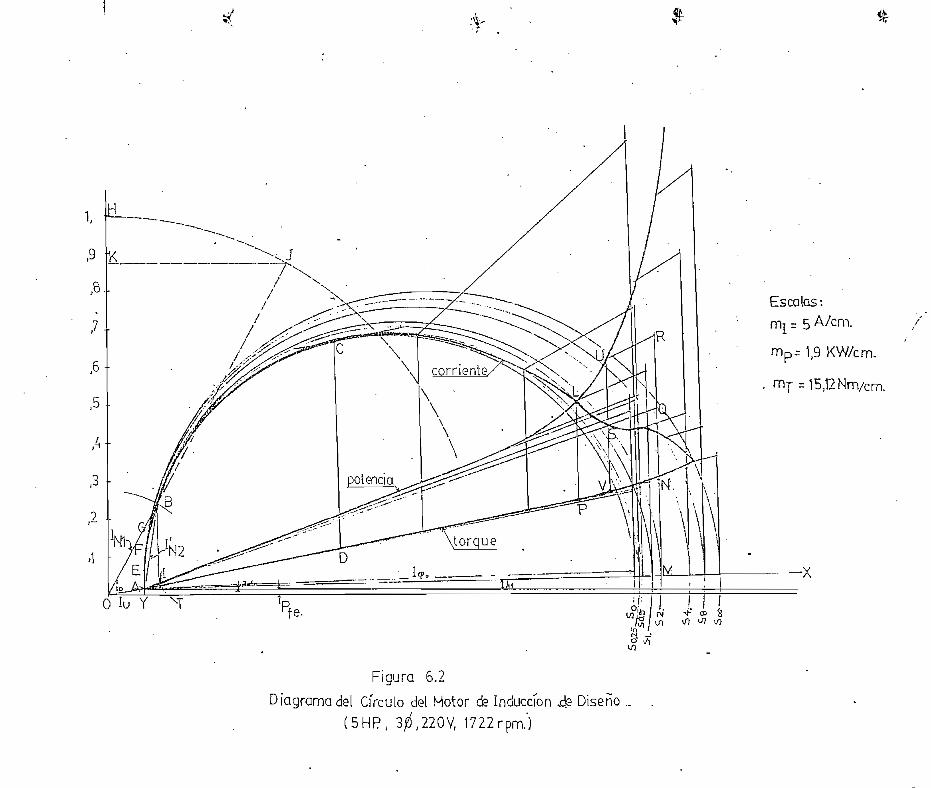
O l
u Y
Fig
ura
6,2
Dia
gram
a de
l C
írcul
o de
l M
otor
efe
indu
cció
n ¿t
e D
iseñ
o ..
(5H
P,
3£),
220V
, 17
22 r
pm.)
Esc
alas
:
= 5
A/c
m.
^ 1,9
KW
/cm
.
rn
^
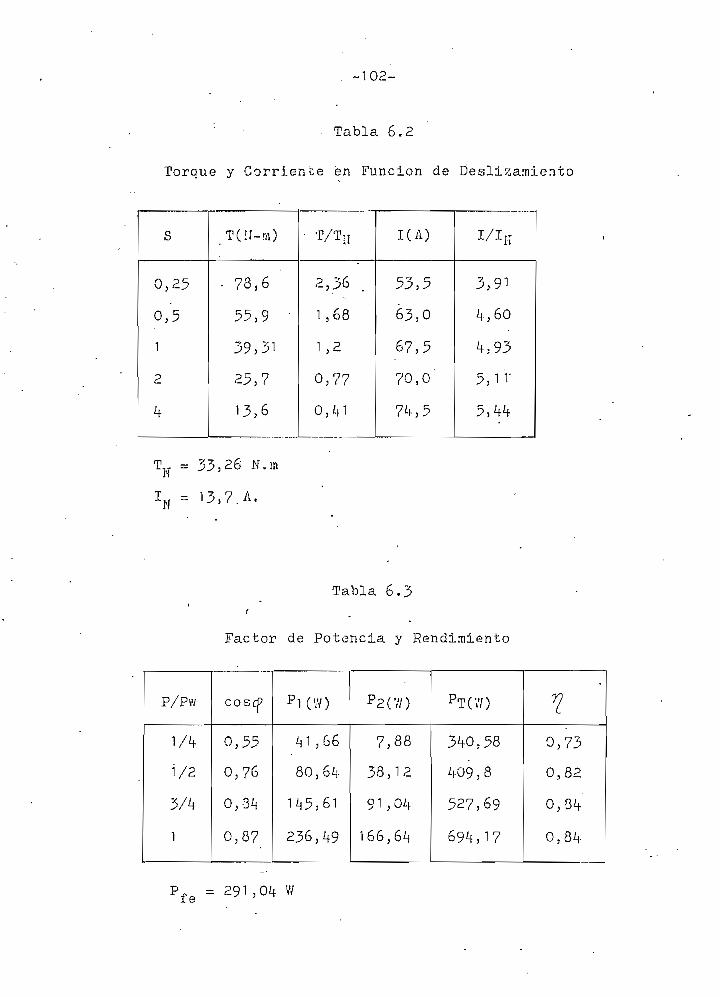
-102-
Tabla 6.2
Torque y Corriente en Función de Deslizamiento
s
0,25
0,5
1
2
k
T(íl-m)
• 78,6
55,9
39,31
25,7
13,6
' T/T:}'
2,36 .
1,68
1,2
0,77
0,41
KA)
53,5
63,0
67,5
70,0
7k,5
I/IK
3,91
if,6o
¿b93
5, ir
5,4if
TH = 33,36 N.
I = 13,7.A.
•Tabla 6.3
Factor de Potencia y Rendimiento
P/Pw
1A
1/2
3/4
1
cosrf>
0555
0,76
0 3 3 / f
0,87
PUW)
¿il>66
8036¿i-
1¿{5 3 61
236^9
pa(v/)
7,88
38312
91 ,0¿f
166, 6¿i
PT(W)
3¿fO?58
W9,8
527 , 69
69¿t,l7
?
0,73
0,82
0,34
0,84
o. e = 291 ,04 W

-103-FKJ-J ru 6.3
C u r v a s de Jorque y Cor r ien te del Motor
de Diseno
'NT/T t'N 1
3, -
"\*
1, -
1,5-
,5-
,
-6
-5
-3
•'
1ti; o-9 r
,7
,6
,5
,4 -
,3
—<-
2.
Figura 6,4
Curvas de Factor de Potencia y Rendimi ento de! Motor
de Diseño
cos.<?
P/P,N

I - 1
APÉNDICE I
HOJA DE DISEÑO PARA MOTOR DE INDUCCIÓN
-CARACTERÍSTICAS DEL MOTOR
- ;ESCUELA.POLITÉCNICA Ii ACIÓN AL
• DSPASTAMErITO DE INGENI¿i?IA ELÉCTRICA '
5HP 1 .SOOrpai 60ciclos ¿{-polos 3 fases
220 voltios línea 13,7 Amp. 13?7 Amp / fase
12? voltios/ fase eficiencia aparente
ESTATOR
Laminación de hierro
Diámetro en el"entrehierro
Diámetro externo
Longitud total
Ductosj número y tamaño
Longitud neta del hiorro
RANURAS: . *•
Número
Profundidad
Ancho
Abertura
Ancho mínimo del diente
Aislamiento de ranura
1% Si' O, ¿}76 mai (galga # 26)
.13,7 cm.
21 >9 cnu
750 cm.
no • ;
7,0 cm.
36
2,3 crn,
0,66-1505 cm.
0;25 cm.
O¡55 cm'. f
Prespan
CONDUCTORES:
Por ranura
Tamaño
Superficie
Sección total
En serie por fase
50
2 - 18 en paralelo
1 3 65 mm^
2.970 aim2
300 '

I - Z
Amperios por rsm ,
Conductores aco.nodados
en ranura .
Circuitos por fase
Conexiones .
,Bobina en
Longitud media de la espi-
ra media
Resistencia por fase a 75 °
Peso del Cobre
a granel
2
estrella iRanuras 1 y 7
21 cm,
0,¿fH ó 0,3¿f a 20 °C
ROTOR
Laminación de hierro
Diámetro del entrehierrp
Ductos, número y tamaño
RAMURAS:
Número
Profundidadt
Ancho
Abertura
Ancho mínimo del diente
CONDUCTORES:
Por ranura
Tamaño
Material
Sección total
ANILLO EXTERNO:'
Sección
Material
Longitud de la barra
Resistencia por fase
(referida) a 75 °Ci
Peso del conductor
}% si 0,¿f76 mm.
13)63 cm-no
30
1,8 cm.
0,.7/t - 0,¿f cm
O, 15 cm.
O-, 65 cm.
1p
95)1 mm"
Aluminio
2.353 -™2
10 . 24 = 240 mm2
Aluminio
8,4 cm.
0;42" y 0,339 a 20 *C
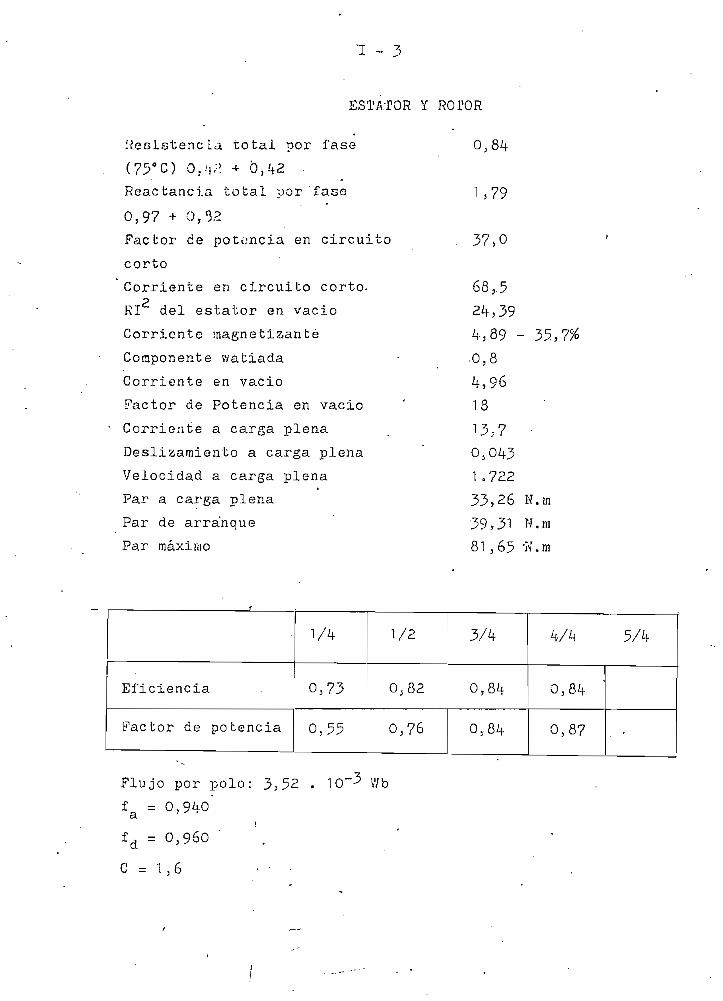
-, "=}
ESTATOR Y ROTOR
desistencia total por fase
(75°O O.-'KÍ + Ó,í*2'
Reactancia total por'fase
0,97 + 0,52
Factor de potencia en circuito
corto
Corriente en circuito corto-o
RI del estator en vacio
Corriente magne tizanté
Componente watiada
Corriente en vacio
Factor de Potencia en vacio
Corriente a carga plena
Deslizamiento a carga plena
Velocidad a carga plena
Par a carga plena
Par de arranque
Par máximo
1 ,79
68,5
2/1. ,39
¿í;89 -
.0,8
35,7%
i .72233,26 N.in
39,31 w . m81 ,65' -N.m
Eficiencia
Factor de potencia
iA
o,73
0,55
1/2
0;82
0,76
3/íf
0,84
0,.8¿f
k/k
0,87
5A
. •
Flujo por polo: 3,52
fa = 0,9 0I
fd = 03960
0 = 1 , 6 - -
10"° V/b
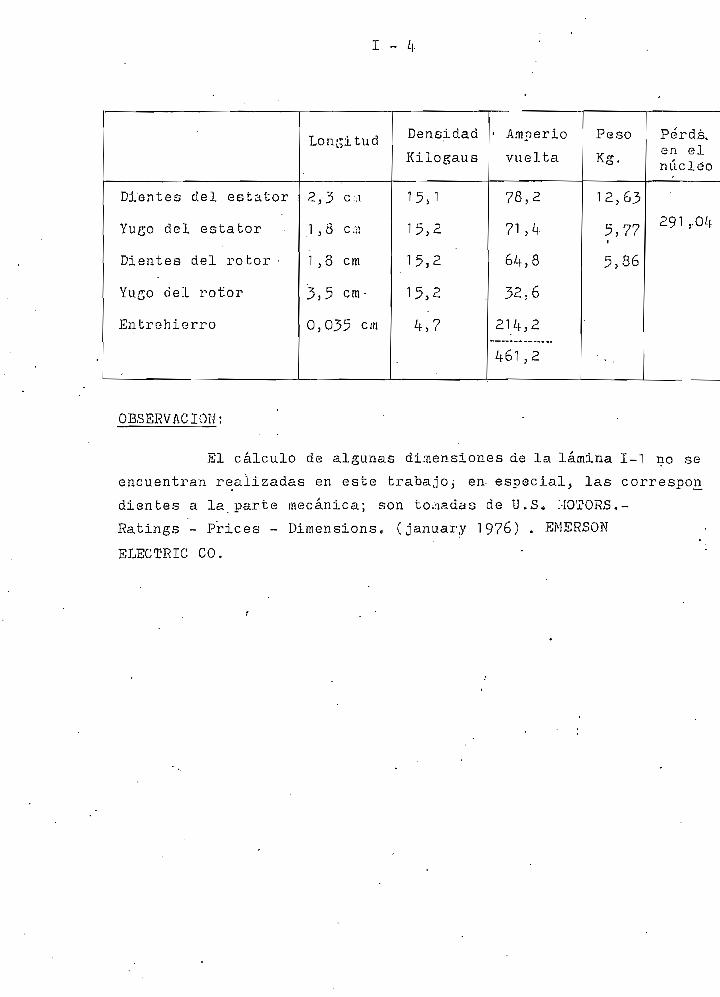
I -
Dientes del estator
Yugo del estator
Dientes del rotor -
Yugo del rotor
Entrehierro
Longitud
2,3 C::l
1 ,3 ca
1 , 8 cm
3,5 cm-
0,035 cm
Densidad
Kilogaus
15,1
T5,2
15,2
15, 2
¿f>7
• Amperio
vuelta
78,2
71, ¿f
64,8
3236
21_¿f92
461,2
Peso
Kg.
12>63
5,77
5536
Perds.en elnúcleo
291 ,04
OBSERVACIÓN:
El cálculo de algunas dimensiones de la lámina 1-1 no se
encuentran realizadas en este trabajo^ en- especial, las correspon
dientes a la parte mecánica; son tomadas de U«S« MOTORS.-
Ratings - Prices - Bimensionsc (january 1976) . EMERSON
ELECTRIC CO. :
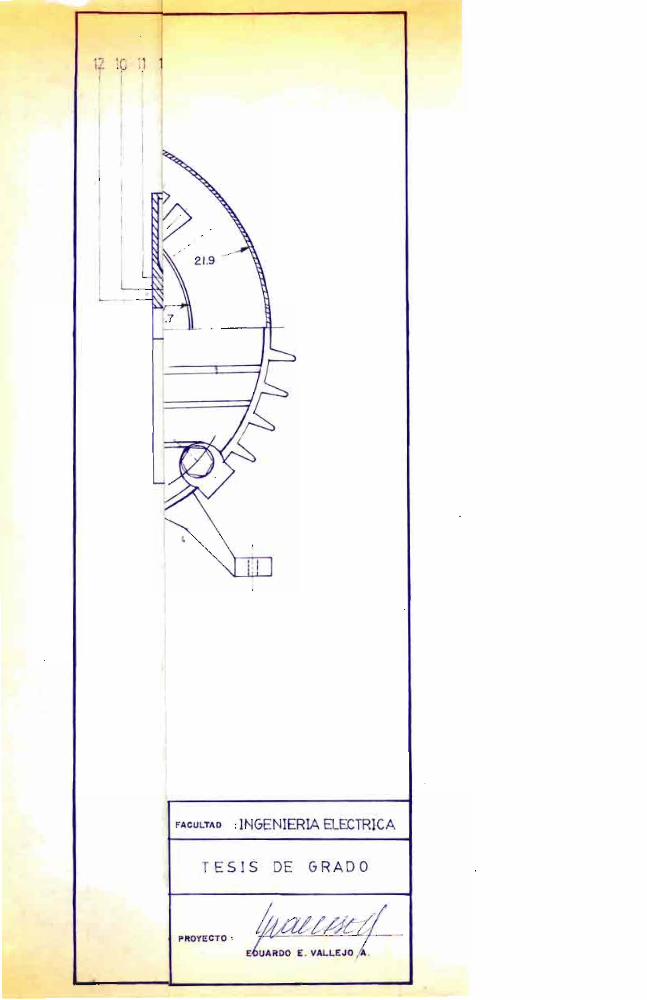
FACULTAD ; INGENIERÍA ELECTRIC A
T E S I S DE G R A D O
PROYECTO '
EOUARDO E . V A L L E J O , Á .

109
ÍNDICE DE 2EFEHENCIAS
Ref. H° Página . Procedencia
1 .9 Diseños de Aparatos Eléctricos.- John H6
/• • Kuhlaáñn. 3a Impresiói^ pág, 330
2 10 . ídem. N° 1 pág. 337»_
3 10 Manual del Ingeniero Electricista. -
Pender Harold pág. 2-82
/., 1 1 ídem N° 3 pág. 1-66
5 15 Liv/schitz-Garik-DC and AC Machines
6' ' " 22 ídem N° 1 apéndice
7 23 La Escuela del Técnico Electricista0- Tomo VI
pág.170
8 23 Cálculo Industrial de Máquinas Eléctricas.-'
4r . Juan Corrales Martin; Tomo II, pág. 398
9 30 Notas de clase "Diseño de Máquinas Eléctricas"
por Ingc Marco Contreras. Año 1 976-1 977
10 37 Curso de transformadores y motores trifásicos
de inducción, pág. 172
1 1 38 Electric Machinery, Fitzgerald.- Kingsley-
' Kusko, pág.3^-6
12 ¿(.¿f ídem N° 1 pág. 333
13 13 ídem N° 9
14 ' 30 ídem N° 9
. 15 31 Polyphase Induction Machinery Theory Reactan-
ce Calculations; Chaper 1 .. pág-, 1 78
16 53 ídem N° 8 pág. 412
. 17 - ' 36 ídem N° 8 pág. 323.
18 38 ídem N° 8 pág. 26¿f-269
" ' 19 63 ídem NO 9
20 " 70 . ídem K° 7 pág. 22
21 77 -• .Electrotecnia; Máquinas de Inducción. -JB í.Martín Artajo.

110
BIBLIOGRAFÍA
1 AMEKTCAN STAi-íDARDS ASSOCIATION, (ASA)
Alt¡. rnatinj-current Induction Motors; Approved October 18
2 ALOER, PHILIP . . '
>¿ • Polyphase Induction Machinery Theory
3 CORRALES MAOTIN, J-
Cálculo Industrial de Máquinas Eléctricas, Ediciones Danae
Barcelona; Noviembre 1968, Tomo I
¿f CORRALES MAHPIN, J
Cálculo Industrial de Máquinas Eléctricas, Ediciones Danae
\, Noviembre 1968. Tomo II
5 CONTKERAS MARCO Ing.
Diseño de Máquinas. Notas de clase, 1976-1977
6 ENCICLOPEDIA CEAC DE ELECTRICIDAD
Talleres Electromecánicos y Bobinados,. Barcelona, Primera
Edición,'1975
? ENRIQUEZ HARPER, G
Curso de Transformadores y Motores Trifásicos de Inducción
V Editorial Limusa, México 1976
8 FITZGERALD, KIÍÍGSLEY, KUSKO
Electric Machinery, Third Edition, Me Grav/-Hill,
Kogakusha, Ltd.,. Tokyo
9 HAROLD PENDER - DEL MAR V/ILLIAM
Manual del Ingeniero Electricista, Traducción al castellano
Editorial Hispano Americana 1952
1 1 1
10 K'JH^MAi'i'I-i) J. H.
DisüfiO de Aparatos Eléctricos, 5ta impresión, C capara, a
Editorial Continental S,A, México, Marzo de 1973
11 KÓÍ-I lGGLOVí, A .V. . .
La Escuela del Técnico Electricista.- 2da Edición, Tra-i
ducción del Alemán, Editorial Labor. Barcelona 1951 Tomo VI
13 KNOÍVLT02Í, A.
Manual Standard del Ingeniero Electricista, Traducción de
la 8 ' Edición ííorteamericana, Editorial Labor S*A, Barce-
lona 1953 -
13 Lr.YSCHinZ, G.M.
D.C .and A-C Machines, Printed in the Ü * S . A . , 1952
H|. MATSCH, L n W c
Máquinas Electromagnéticas y Electromecánicas, 1 5 Edición
15 MULLES GERMÁN
Elektrische Maschinen, Veb Verlag Technikj Berlín, 1 97¿h
t16 MARTIN ARTAJO. J.I.
Electrotecnia, Máquinas de Inducción, Ediciones I.C0A»I5
Madrid 1963> Tomo VI
^!7 NATIONAL ELECTRIC MANUFACTÜfíERS ASSOCIATION, (NEMA)
IMDUCTION MOTOR, Ne\ York, March ZS 3 ^97^:
18 PROYECTO DE NORMA ECUATORIANA
Máquinas Eléctricas Rotativas, Requisitos, ElO^ .01 -¿fOl «
Formas Constructivas, Requisitos, EL 0¿h.01 -¿f02. 1975-12-22