temas de fÍsica y quÍmica (oposiciones de … · 3/22 derarse puntos materiales si se estudian...
TRANSCRIPT
1/22
TEMAS DE FÍSICA Y QUÍMICA(Oposiciones de Enseñanza Secundaria)
-------------------------------------------------------------------------------TEMA 4
CINEMÁTICA. ELEMENTOS PARA LA DESCRIPCIÓN DEL MOVIMIEN-TO. MOVIMIENTOS DE ESPECIAL INTERÉS. MÉTODOS PARA EL ESTUDIOEXPERIMENTAL DEL MOVIMIENTO.
Esquema
1. Cinemática.2. Elementos para la descripción del movimiento.
2.1. Sistemas de referencia2.2. Vector de posición de un móvil.2.3. Vector velocidad.2.4. Vector aceleración.2.5. Componentes intrínsecas de la aceleración.2.6. Concepto de radio de curvatura.
3. Movimientos de especial interés.3.1. Movimiento uniforme.3.2. Movimiento rectilíneo uniformemente acelerado.3.3. Movimiento circular uniforma.3.4. Movimiento circular uniformemente acelerado.3.5. Movimiento armónico simple.3.6. Composición de movimientos rectilíneos.
3.6.1. Descripción de casos elementales.3.6.2. Movimiento parabólico de caída.3.6.3. Movimiento de proyectiles.3.6.4. Composición de movimientos armónicos simples.
4. Métodos para el estudio experimental del movimiento.4.1. Métodos tradicionales de laboratorio de mecánica.4.2. Métodos de fotografía estroboscópica.4.3. Métodos de laboratorio asistido por ordenador.
2/22
TEMA 4
CINEMÁTICA. ELEMENTOS PARA LA DESCRIPCIÓN DEL MOVIMIEN-TO. MOVIMIENTOS DE ESPECIAL INTERÉS. MÉTODOS PARA EL ESTUDIOEXPERIMENTAL DEL MOVIMIENTO.
1. CINEMÁTICA.
La cinemática estudia el movimiento de los cuerpos sin tener en cuenta las causasque lo producen que son las fuerzas.
El movimiento es el fenómeno físico más familiar y el más frecuente y general dela Naturaleza. Todos los fenómenos básicos que estudia la Física están originados en sunaturaleza íntima, por movimientos de determinadas entidades, así por ejemplo:
- La electricidad constituye el movimiento de cargas en conductores.- El Magnetismo está originado por el movimiento de cargas.- El Calor tiene su origen en el movimiento molecular,- La Luz, como toda onda electromagnética, tiene su origen en el movimiento vibrato-
rio de partículas cargadas.- El Sonido, como toda onda mecánica, se origina por el movimiento oscilatorio de
partículas en un medio material.
El estudio del movimiento tanto desde el punto de vista cinemática como deldinámico, constituye la base fundamental de la Mecánica y por consiguiente de toda laFísica.
2. ELEMENTOS PARA LA DESCRIPCIÓN DEL MOVIMIENTO.
2.1. Sistemas de Referencia.
Para un estudio correcto del movimiento hemos de elegir en primer lugar un siste-ma de referencia (generalmente establecido por un sistema de coordenadas) al cualreferir la posición de un punto material mediante unas coordenadas numéricas. El puntoestará en reposo cuando las coordenadas respecto al sistema de referencia, no varían conel tiempo y estará en movimiento cuando al menos una coordenada varía con el tiempo.
Generalizando la definición a un cuerpo formado por muchos puntos materiales,diremos que está en movimiento cuando al menos una coordenada de cualquiera de suspuntos varía con el tiempo. En esta definición de movimiento quedan englobados todoslos tipos de movimiento que un cuerpo pueda tener: traslación, rotación, vibración,deformación, etc.
Consideraremos en cinemática el movimiento del cuerpo más sencillo, el Puntomaterial o partícula material cuyas dimensiones pueden despreciarse al estudiar elmovimiento. La aplicación del concepto del Punto Material a los sistemas reales de lanaturaleza depende de las condiciones específicas del problema, así por ejemplo, losplanetas pueden considerarse puntos materiales cuando se estudian sus movimientosalrededor del Sol referido a un sistema de referencia fijo en éste, pero no pueden consi-
3/22
derarse puntos materiales si se estudian los movimientos de rotación alrededor de suspropios ejes.
El movimiento es un concepto relativo pues debe referirse a un sistema particularde referencia elegido arbitrariamente y considerado fijo. Las observaciones hechas en laTierra están referidas a un sistema referencial situado en ella y por ende, en movimientocon la propia Tierra. Los astrónomos prefieren referir el movimiento estelar a unsistema de “estrellas fijas” aunque el sistema adolece del mismo defecto pues estos pun-tos considerados fijos, aunque poco, varían sus posiciones con el tiempo.
El sistema de referencia fijo absoluto no existe, por imposibilidad de fijar dichosistema en el espacio, ya que implicaría a su vez otra referencia fija por si misma demanera absoluta.
Normalmente debe elegirse el sistema de referencia que permita que las observa-ciones, medidas y análisis de los datos del sistema físico estudiado, sean lo más senci-llos posible.
El movimiento tiene el mismo carácter, tanto si está referido a un hipotético siste-ma fijo absoluto como si está referido a unos sistemas animados con movimiento uni-forme (v=cte) respecto de los primeros. Por ello, para referir un movimiento, bastaráconsiderar como sistema de referencia unos ejes que se desplacen con movimiento detraslación uniforme, que llamaremos sistemas referenciales inerciales o Galileanos.
El movimiento referido a sistemas referenciales no-inerciales, o sea, con movi-miento de traslación no uniforme (con aceleración) o con movimiento de rotación, es untema de considerable importancia cuyo estudio resuelve importantes problemas relacio-nados con el movimiento de gran alcance como el de satélites artificiales, cohetes inter-continentales, cápsulas espaciales, masas de aire, corrientes marinas, etc. Pero no setratará en este tema.
2.2. Vector de posición de un Móvil.
La Posición de un punto móvil en el espacio queda fijada por el vector de posi-ción, r
ρ trazado desde el origen O de coordenadas hasta la posición del móvil P. Las
componentes del vector rρ
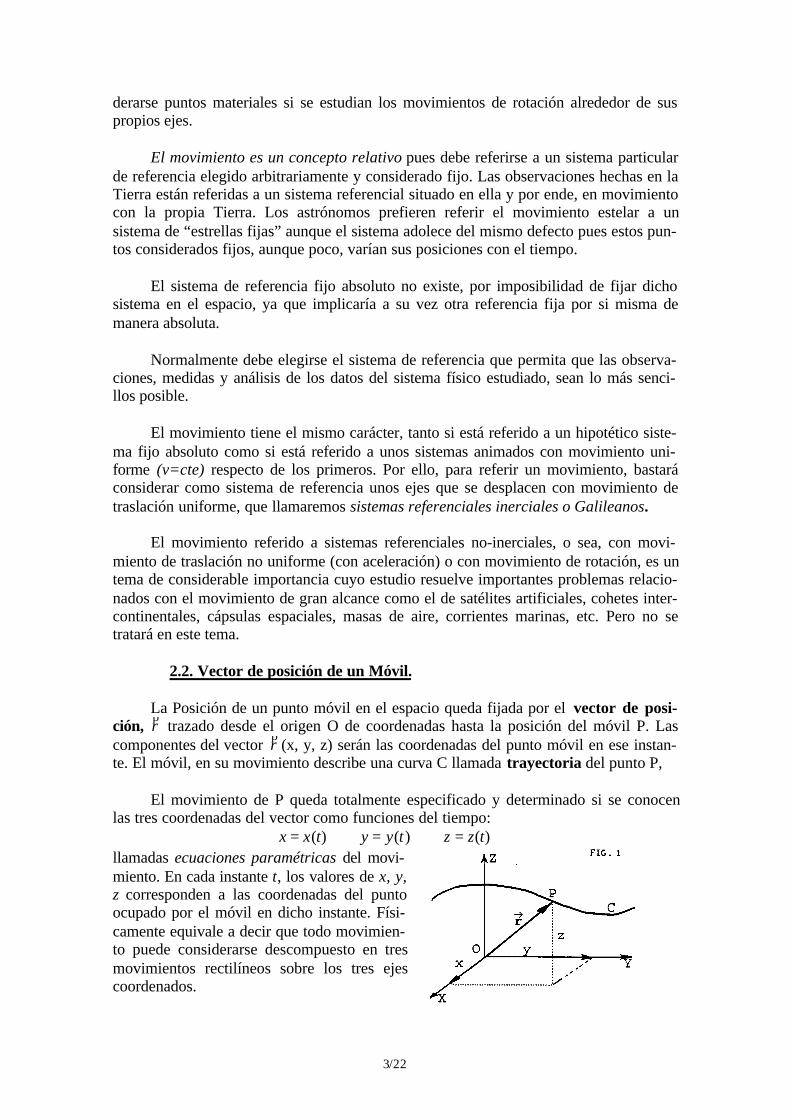
(x, y, z) serán las coordenadas del punto móvil en ese instan-te. El móvil, en su movimiento describe una curva C llamada trayectoria del punto P,
El movimiento de P queda totalmente especificado y determinado si se conocenlas tres coordenadas del vector como funciones del tiempo:
)(txx = )(tyy = )(tzz =llamadas ecuaciones paramétricas del movi-miento. En cada instante t, los valores de x, y,z corresponden a las coordenadas del puntoocupado por el móvil en dicho instante. Físi-camente equivale a decir que todo movimien-to puede considerarse descompuesto en tresmovimientos rectilíneos sobre los tres ejescoordenados.

4/22
De las ecuaciones paramétricas x = x(t), y = y(t), z = z(t) se deduce la ecuación dela trayectoria del punto móvil con sólo eliminar entre ellas la variable independiente t.
El vector de posición vendrá dado por la expresión vectorial:ktzjtyitxtrrρρρρρ
)·()·()·()( ++==expresión que determina r
ρ para cualquier instante t y se puede escribir de modo
genérico como: )(trrρρ
= que es la ecuación vectorial del movimiento.
La distancia recorrida por el móvil es la suma de todas las longitudes recorridas enlos sucesivos intervalos de tiempo desde el instante inicial (to) al instante final (t). Estadistancia constituye la trayectoria definida anteriormente y sobre ella, el problema cine-mático consiste en determinar el camino recorrido en función del tiempo, es decir:
s = s(t)
Vemos pues dos aspectos en el tratamiento de los problemas cinemáticos. Elprimero de ellos y más general, partiendo del vector de posición )(trr
ρρ= del que se
derivarán todas las ecuaciones vectoriales del movimiento, válidas cualquiera que sea latrayectoria e independiente del sistema de referencia. Un segundo aspecto, más limita-do, determina únicamente el camino recorrido sobre la trayectoria mediante la expresións=s(t), de la que se deducen las ecuaciones escalares del movimiento sobre la trayecto-ria, para lo cual es necesario fijar un punto inicial de origen en la trayectoria: s=0 parareferir a él las distancias recorridas y demás variables cinemáticas.
2.3. Vector velocidad.
Para el estudio del movimiento es necesario conocer la posición del móvil en cadainstante, que vendrá dada por el vector de posición y la variación de esta posición con eltiempo, que vendrá dada por el vector velocidad.
Si un móvil se encuentra en un instante dado, en la posición P (dada por el vectorde posición r
ρ) y un intervalo ∆t después se encuentra en Q (dada por el vector de
posición rρ
+ rρ
∆ ) el móvil ha sufrido un desplazamiento vectorial rρ
∆ y ha recorrido unintervalo de trayectoria s∆ son, por definición, diferentes y no coincidentes. Sólo en elcaso límite de que el intervalo de tiempo sea infinitesimal, ambos conceptos serán coin-cidentes en el gráfico y el módulo de r
ρ∆ coincidirá con s∆ .
Se define el Vector Velocidad Media mvρ
como
el cociente:tr
vm ∆∆
=ρ
ρ
que es un vector de dirección y sentido idéntico alvector desplazamiento r
ρ∆ , pues el escalar ∆t será
siempre positivo. La dirección del vector desplaza-miento y por ello la del vector velocidad media es ladirección de la cuerda del arco PQ.
Análogamente se define la Velocidad Media en la Trayectoria vm (magnitud esca-lar) al cociente de la trayectoria recorrida en el tiempo empleado:
ts
vm ∆∆
=

5/22
Ambas velocidades medias, una vectorial y otra escalar, no son generalmente, deigual módulo pues sr ∆≠∆
ρcomo puede apreciarse en la Fig.2.
Si reducimos el intervalo de tiempo ∆t hasta valores muy pequeños que tiendan acero, el vector velocidad quedará referido a un intervalo infinitamente pequeño, y sellamará Vector velocidad instantánea o simplemente Vector Velocidad:
dtrd
tr
limvt
ρρρ
=∆∆
=→∆ 0
(a)
Análogamente se definirá la Velocidad Instantánea sobre la Trayectoria como:
dtds
ts
limvt
=∆∆
=→∆ 0
(b)
Ambas expresiones están relacionadas entre sí como demostraremos a continua-ción. Considerando el vector velocidad instantánea:
ts
limsr
limss
tr
limvtst ∆
∆∆∆
=∆∆
∆∆
=→∆→∆→∆ 000
..ρρ
ρ
El 1er límite es un vector de módulo 1 ya que rρ
∆ y ∆s tienden a ser iguales cuan-do ∆s→0, pues el arco (∆s) y la cuerda ( r
ρ∆ ) se confunden cuando se hacen infinita-
mente pequeños y tiene dirección tangente a la trayectoria. La dirección de rρ
∆ (inicial-mente secante a la curva) tiende hacia una dirección tangente cuando ∆s se haceinfinitamente pequeño. Por tanto, el primer límite representa un vector unitario tangentea la trayectoria en el punto:
ts
udsrd
sr
limρ
ρρ==
∆∆
→∆ 0 (vector unitario tangente) pues 1=
→ PQPQ
limQP
El 2º límite es el que hemos definido como velocidad media en la trayectoria,calculada en un intervalo reducido que tiende a cero:
vts
limt
=∆∆
→∆ 0 (velocidad instantánea sobre la trayectoria)
Finalmente resultará: tuvvρρ
·= (c)el vector velocidad instantánea es un vector tangente a la trayectoria que tiene pormódulo la velocidad instantánea calculada sobre la trayectoria y que llamaremos sim-plemente Celeridad. (Recordemos que todo vector puede expresarse como el productode su módulo por un vector unitario en la dirección del vector).
Teniendo en cuenta la expresión de:ktzjtyitxrρρρρ
)·()·()·( ++=el vector velocidad también puede expresarse en un sistema cartesiano mediante laderivada del vector de posición:
kdt
tdzj
dttdy
idt
tdxdtrd
vρρρρ
ρ )()()(++==
y la celeridad, o módulo de la velocidad, será:2/1222
+
+
==
dtdz
dtdy
dtdx
vv
que será una función del tiempo, como lo son las componentes dx/dt, dy/dt y dz/dt.

6/22
2.4. Vector Aceleración.
El movimiento de un punto material, en su forma más general, tiene en cada puntode la trayectoria un vector de posición y un vector velocidad diferentes, lo que significauna variación de la velocidad tanto en módulo como en dirección y sentido.
En el instante t la velocidad del puntomóvil situado en P es v
ρ y después de trans-
currido un intervalo de tiempo ∆t, es decir enel instante t+∆t, la velocidad del móvil,situado en Q es v
ρ+∆ v
ρ. Definimos el Vector
Aceleración Media al cociente entre la varia-ción del vector velocidad y el intervalo detiempo transcurrido. Es un vector que tiene lamisma dirección y sentido que ∆ v
ρ:
tv
am ∆∆
=ρ
ρ
Considerando un intervalo de tiempo infinitamente pequeño, que tienda a cero,podemos definir el Vector Aceleración Instantánea o simplemente el Vector Acelera-ción como el valor en el límite, de la relación ∆V/∆t cuando ∆t tiende a cero, es decir:
2
2
0 dtrd
dtrd
dtd
dtvd
tv
limat
ρρρρρ
=
==
∆∆
=→∆
El vector aceleración tendrá por componentes:
kdt
zdj
dtyd
idt
xdk
dtdv
jdt
dvi
dtdv
a zyxρρρρρρρ
2
2
2
2
2
2
++=++=
y su módulo será:2
2
22
2
22
2
2
+
+
==
dtzd
dtyd
dtxd
aaρ
2.5. Componentes Intrínsecas de la Aceleración.
De la propia definición del vector aceleración aρ
se deduce que, en general, no esni tangente a la trayectoria (pues implicaría una dirección constante en V
ρ) ni perpendi-
cular a ella (pues implicaría un módulo constante en Vρ
) y por ello puede ser descom-puesto en dos componentes, una tangente y otra perpendicular a la trayectoria, que sellamarán componentes intrínsecas de la aceleración. Dichas componentes están situadasen un sistema de coordenadas intrínseco al móvil, con ejes tangente y normal a latrayectoria e independiente de cualquier sistema de referencia.
Aplicando la definición de aρ
a la expresión del vector velocidad, resultará:
( )dt
udvu
dtdv
uvdtd
dtvd
a ttt
ρρρ
ρρ
··· +=== (d)
como vemos, aρ
tiene dos componentes vectoriales, una de ellas es tangente a latrayectoria, de módulo dv/dt, que llamaremos aceleración tangencial.
7/22
El último término de la expresión (d): dut/dt se transforma en:
vds
ud
dtds
ds
ud
dt
ud ttt ..ρρρ
== (V=celeridad o módulo de la velocidad) (e)
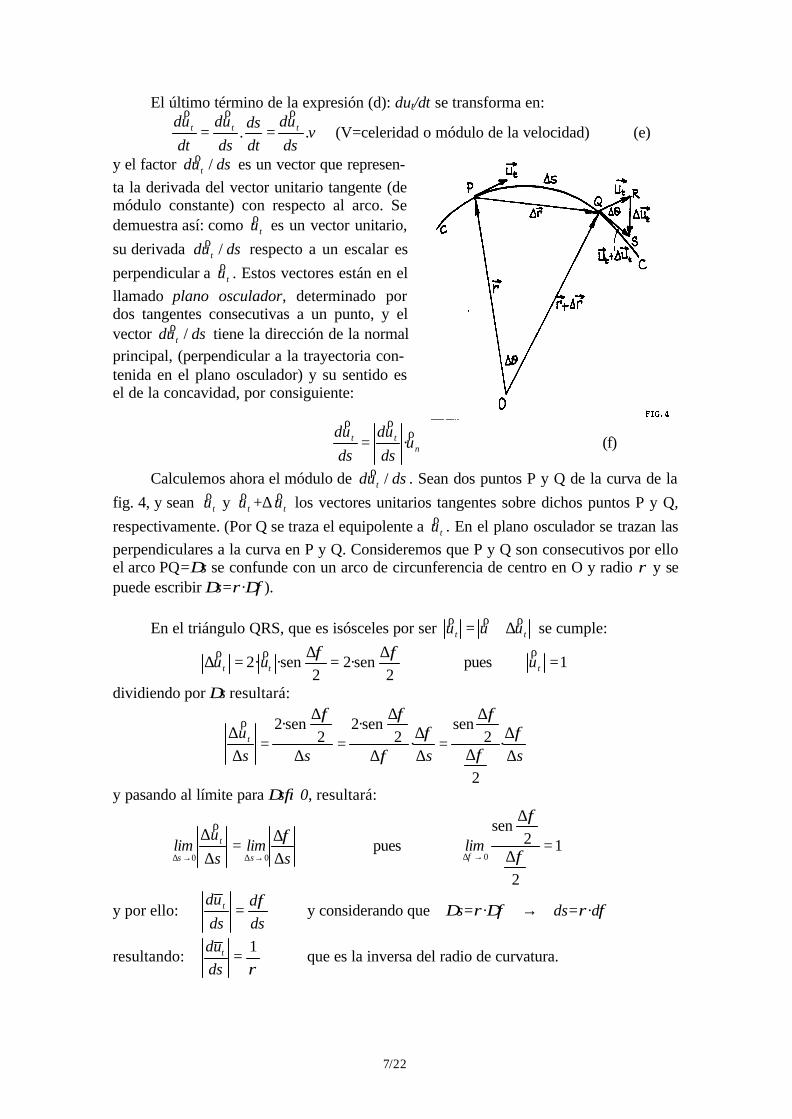
y el factor dsud t /ρ es un vector que represen-ta la derivada del vector unitario tangente (demódulo constante) con respecto al arco. Sedemuestra así: como tuρ es un vector unitario,
su derivada dsud t /ρ respecto a un escalar es
perpendicular a tuρ . Estos vectores están en elllamado plano osculador, determinado pordos tangentes consecutivas a un punto, y elvector dsud t /ρ tiene la dirección de la normalprincipal, (perpendicular a la trayectoria con-tenida en el plano osculador) y su sentido esel de la concavidad, por consiguiente:
ntt u
ds
ud
ds
ud ρρρ
·= (f)
Calculemos ahora el módulo de dsud t /ρ . Sean dos puntos P y Q de la curva de la
fig. 4, y sean tuρ y tuρ +∆ tuρ los vectores unitarios tangentes sobre dichos puntos P y Q,
respectivamente. (Por Q se traza el equipolente a tuρ . En el plano osculador se trazan lasperpendiculares a la curva en P y Q. Consideremos que P y Q son consecutivos por elloel arco PQ=∆s se confunde con un arco de circunferencia de centro en O y radio ρ y sepuede escribir ∆s=ρ·∆φ).
En el triángulo QRS, que es isósceles por ser tt uuu ρρρ ∆+= se cumple:
2·sen2
2·sen·2
φφ ∆=
∆=∆ tt uu
ρρ pues 1=tu
ρ
dividiendo por ∆s resultará:
ssssu t
∆∆
∆
∆
=∆∆
∆
∆
=∆
∆
=∆∆ φ
φ
φφ
φ
φφ
·
2
2sen
·2·sen2
2·sen2ρ
y pasando al límite para ∆s→0, resultará:
slim
s
ulim
s
t
s ∆∆
=∆∆
→∆→∆
φ00
ρ
pues 1
2
2sen
0=
∆
∆
→∆ φ
φ
φlim
y por ello:dsd
ds
ud t φ= y considerando que ∆s=ρ·∆φ → ds=ρ·dφ
resultando:ρ1
=dsud t que es la inversa del radio de curvatura.

8/22
Por tanto, sustituyendo en (f): nt u
ds
ud ρρ
·1ρ
= y luego sustituyendo en (e)
nt u
vdtud ρ
·ρ
= y ésta finalmente en (c) resulta: nt uv
udtdv
aρρρ
ρ
2
+=
lo que demuestra que el vector aceleración aρ
no tieneni dirección normal ni dirección tangente a la trayec-toria pues presenta dos componentes en estas direc-ciones. Unicamente se puede asegurar que el sentidode la componente normal es hacia el interior de la con-cavidad de la trayectoria. Las componentes son: FIG.5
Aceleración tangencial: tt udtdv
aρρ
= y su módulo dtdv
Aceleración normal (centrípeta): nn uv
aρρ
·2
ρ= y su módulo
ρ
2v
La aceleración tangencial taρ
puede ser positiva si está dirigida en la dirección de
vρ
y negativa si está dirigida en sentido contrario a vρ
, y la aceleración normal naρ
essiempre positiva y dirigida hacia la concavidad de la curva. El módulo de la aceleración,en función de sus componentes será:
222
22
+
=+==
ρv
dtdv
aaaa nt
ρ
y el ángulo que forma la aceleración con la tangente a la trayectoria vendrá dado por:
t
n
t
n
A
A
A
Aarctgtg == φφ
Las componentes intrínsecas de la aceleración son de gran importancia en cinemá-tica pues nos da, cada una de ellas, un aspecto de la variación de la velocidad con eltiempo. La aceleración tangencial nos da la variación del módulo de la velocidad con eltiempo y la aceleración normal nos da la variación de la dirección de la velocidad con eltiempo. La clasificación de los movimientos debe hacerse por los valores de dichascomponentes y de ellas se deducen sus ecuaciones.
El cálculo de las componentes intrínsecas también se puede realizar mediante elsiguiente mecanismo vectorial:
Aceleración tangencial.- De la derivada del vector de posición se obtiene elvector velocidad y derivando por segunda vez se obtiene el vector aceleración y a partirde ambas, se realiza su producto escalar:
vva
ayavvava tt
ρρρρ •
===• .cos.. φ
y la dirección del vector unitario tangente será: vv
uρ
ρ= luego:
( )2v
vvauaa ttt
ρρρρρ •
==
Aceleración normal.- A partir de los mismos vectores aρ
y vρ
, realizamos suproducto vectorial:
navvava .sen.. ==∧ φρρ
y v
vaan
ρρ∧
=
9/22
)()(
vavvav
un ρρρ
ρρρρ
∧∧∧∧
=
y la dirección del vector unitario normal será:
como puede demostrarse fácilmente en la figura 3.
2.6. Concepto de Radio de curvatura.
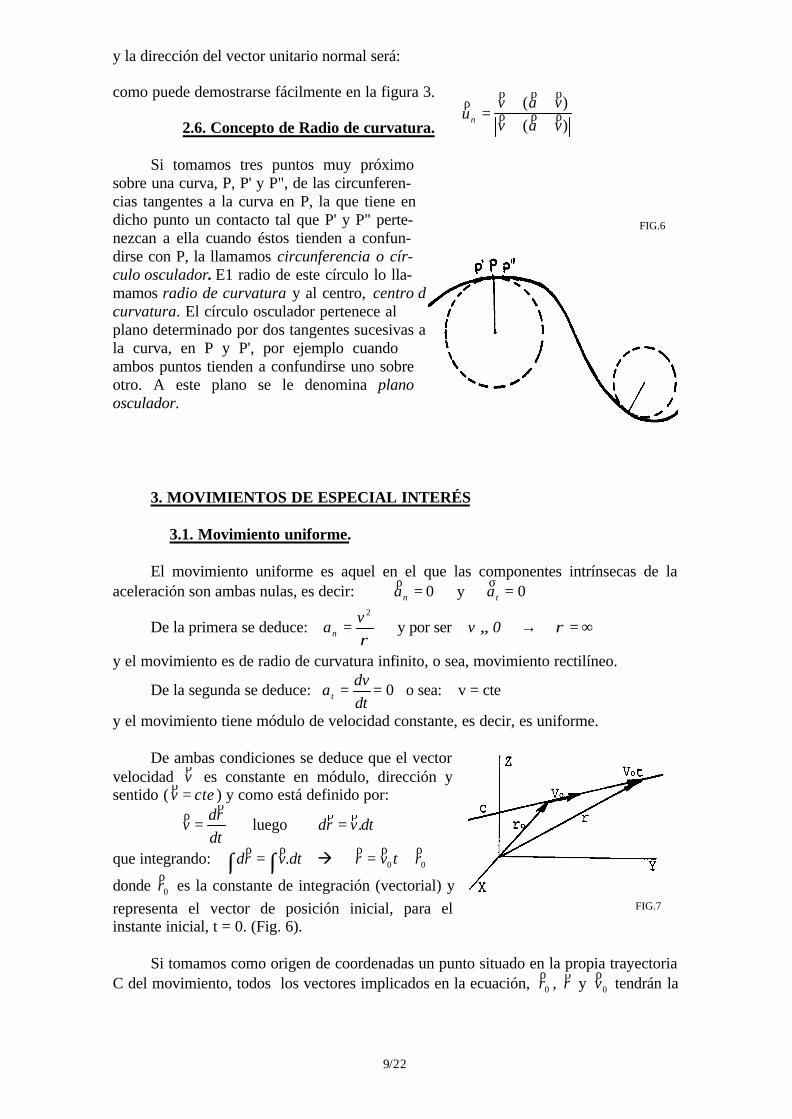
Si tomamos tres puntos muy próximo sobre una curva, P, P' y P", de las circunferen-cias tangentes a la curva en P, la que tiene en dicho punto un contacto tal que P' y P" perte-nezcan a ella cuando éstos tienden a confun-dirse con P, la llamamos circunferencia o cír-culo osculador. E1 radio de este círculo lo lla-mamos radio de curvatura y al centro, centro de curvatura. El círculo osculador pertenece al plano determinado por dos tangentes sucesivas a la curva, en P y P', por ejemplo cuando ambos puntos tienden a confundirse uno sobre otro. A este plano se le denomina plano osculador.
FIG.6
3. MOVIMIENTOS DE ESPECIAL INTERÉS
3.1. Movimiento uniforme.
El movimiento uniforme es aquel en el que las componentes intrínsecas de laaceleración son ambas nulas, es decir: 0=na
ρ y 0=ta
σ
De la primera se deduce: ρ
2van = y por ser v ≠ 0 → ∞=ρ
y el movimiento es de radio de curvatura infinito, o sea, movimiento rectilíneo.
De la segunda se deduce: dtdv
a t = = 0 o sea: v = cte
y el movimiento tiene módulo de velocidad constante, es decir, es uniforme.
De ambas condiciones se deduce que el vectorvelocidad v
ρ es constante en módulo, dirección y
sentido ( ctev =ρ
) y como está definido por:
dtrd
vρ
ρ= luego dtvrd .
ρρ=
que integrando: ∫ ∫= dtvrd .ρρ
à 00 rtvrρρρ
+=
donde 0rρ
es la constante de integración (vectorial) yrepresenta el vector de posición inicial, para elinstante inicial, t = 0. (Fig. 6).
FIG.7
Si tomamos como origen de coordenadas un punto situado en la propia trayectoriaC del movimiento, todos los vectores implicados en la ecuación, 0r
ρ, r
ρ y 0v
ρ tendrán la

10/22
omisma dirección y se podrá escribir: s = s + v t0 , donde 0s , s y 0v serán los módulosde los vectores correspondientes.
3.2. Movimiento rectilíneo uniformemente acelerado.
Este movimiento se caracteriza por que sus componentes intrínsecas de la acelera-ción toman los valores: an = 0 y at = cte ≠ 0
De la primera se deduce como en el caso anterior, que el radio es infinito: r = ∞ ypor consiguiente el movimiento tiene trayectoria rectilínea.
De la segunda se obtiene: dv/dt=at (constante) siendo ésta además la aceleracióntotal (por ser la única) pues:
ttnt aaaaa ==+= 222
y como la aceleración tangencial tiene dirección tangente a la trayectoria igual que lavelocidad, se podrá escribir:
aadtvd t
ρρρ==/ o bien: dtavd .
ρρ= e integrando: ∫ ∫ dtavd .
ρρ resulta:
0. vtavρρρ
+=siendo 0v
ρ la constante de integración que corresponde con la velocidad inicial o veloci-
dad para t = 0.
Si sustituimos esta expresión en la ecuación de definición de vρ
resulta:
tavdtrd
v .0
ρρρ
ρ+== o bien: dttadtvrd ...0
ρρρ+=
e integrando: ∫ ∫ ∫+= dttadtvrd ...0
ρρρ à 2
00 .21
. tatvrrρρρρ
++=
donde 0rρ
es la constante de integración querepresenta el vector de posición en el instanteinicial t = 0.
Si elegimos como origen de coordena-das un punto situado en la propia trayectoriarecta C del movimiento, resultarán r
ρ, 0r
ρ, 0v
ρ,
aρ
, vectores todos ellos de la misma direccióny podrán escribirse las ecuaciones anterioressólo con sus módulos, es decir: FIG. 8
200 .
21
. tatvss ++= y tavv .0 +=
Entre ambas ecuaciones podemos eliminar el tiempo t para obtener una ecuaciónde la velocidad en función del espacio y la aceleración v=f(s,a).:
despejando t de la segunda ecuación: a
vvt o−
=
y sustituyendo en la ecuación del espacio resulta:
...2
.2.
21 0
20
2200
0
2
0000 =
−++
−+=
−+
−+=
a
vvvv
a
vvvs
a
vva
a
vvvss

11/22
a
vvs
a
vvvvvvvs
22
.22.2...
20
2
00
20
2200
0
−+=
−++−+=
de donde: a
vvss
2
20
2
0
−=− resultando )(2 0
20
2 ssavv −+=
En el caso de que el origen de coordenadas sea arbitrario y esté fuera de la trayec-toria, la expresión vectorial anterior:
200 2
1tatvrr
ρρρρ++= puede ponerse: 2
00 21
tatvrrρρρρ
+=−
resultando que los vectores 0rrρρ
− , 0vρ
y aρ
tienen todos la misma dirección como puede
apreciarse en la figura 8, y pueden escribirse por sus módulos llamando 0rrsρρ
−= re-
sultando: 20 2
1attvs +=
Si se trata de un movimiento uniformemente retardado (decelerado), la acelera-ción será negativa y si el movimiento se debe a la acción gravitatoria en recorridos cor-tos muy próximos a la superficie de la Tierra, la aceleración se puede considerar cons-tante e igual a a=g = 9’8 m/s2 = 980 cm/s2 y se denomina movimiento de caída libre.
3.3. Movimiento circular uniforme.
Para este movimiento las componentes intrínsecas de la aceleración toman lossiguientes valores: an = cte ≠ 0 y at= 0
De la segunda condición at=dv/dt=0 se deduce que v=cte y como la primeracondición implica: an=v2/ρ=cte, de todo ello se deduce que ρ=cte y la trayectoria ha deser circular de radio ρ. La aceleración total del movimiento será:
nnt aaaaρρρρ
=+=y la velocidad será constante en módulo pero no en dirección, en consecuencia, la ecua-ción que nos dará el espacio recorrido por el móvil a lo largo de su trayectoria circulares la misma que la correspondiente al movimiento uniforme y rectilíneo, midiendo losespacios sobre la circunferencia: tvss .0 +=
En este tipo de movimiento interesa conocer el ángulo girado por el radio-vectorque une el centro con el móvil. Recordando que: Arco(m)=Radio(m).Angulo(rad)resulta: S = ρ·φ y derivando respecto al tiempo, resultará:
dtd
dtds φρ·= o sea
dtd
vφρ.=
esta última derivada representa la variación del ángulo girado por el vector de posiciónen la unidad de tiempo, a lo que se le llama velocidad angular y se representa por ω:ω=dφ/dt, resultando: v=ω.ρ (ω → rad/s)
Por convenio se representa la velocidad angular por un vector axial normal alplano de la circunferencia (plano de r
ρ y v
ρ) de sentido el correspondiente a la regla del
sacacorchos (regla de Maxwell) y de módulo proporcional a su valor, por ello puedeescribirse: ρω ρρρ
∧=vexpresión que también puede escribirse así:

12/22
ωωρ ρρρρ∧=∧−= AOv
es decir, la velocidad tangencial vρ
es el momento delvector velocidad angular ωρ con respecto al punto A
3.4. Movimiento Circular Uniformemente Acelerado
En él, las componentes intrínsecas de la aceleración toman los siguientes valores:an=v2/ρ ≠ cte ∝ t2 y at=dv/dt=cte
tendrá como trayectoria una circunferencia de radio ρ y sobre ella el movimiento vendrádescrito por las ecuaciones del movimiento uniformemente acelerado:
200 2
1tatvss t++= tavv t+= 0 )(2̀ 0
20
2 ssavv t −+=
Como la velocidad no es constante, tampoco lo será la velocidad angular relacio-nada con aquella mediante el radio ρ: V=ω.ρ y por ello derivando con respecto al tiem-po, resultará:
( ) ρωρω ..dtd
dtd
dtdv
== o sea a = α·ρ
donde α=dω/dt es la aceleración angular o variación de la velocidad angular conrespecto al tiempo. Se mide en rad/s2 en el sistema Internacional (S.I.).
Las ecuaciones anteriores pueden deducirse en función de las magnitudes angula-res a partir de: ω = dθ/dt y α = dω/dt e integrando, o sea:
200 2
1tt αωθθ ++= ω = ω0 + αt ω2 = ω0
2 + 2αθ
3.5. Movimiento Armónico Simple.
Llamamos movimiento periódico a cualquier movimiento que se repite a interva-los iguales de tiempo. Por ejemplo, el movimiento de una masa sujeta a un muelle, elmovimiento de un péndulo, las vibraciones de los átomos de una molécula, etc. Cuandouna partícula que realiza un movimiento periódico se mueve alternativamente en un sen-tido y otro sobre una misma trayectoria, recibe el nombre de movimiento oscilatorio.
El movimiento oscilatorio más importante es el movimiento armónico simple, porser el más fácil de describir matemáticamente y constituye un modelo exacto o aproxi-mado para muchos sistemas físicos.
Decimos que una partícula que se mueve a lo largo del eje X realiza un M.A.S.centrado en el origen O de dicho sistema coordenado, cuando su desplazamiento X conrespecto al origen viene expresado enfunción del tiempo en la forma:
( )ψω += tAx sen.donde A, ω y ψ son constantes propias del movimiento armónico.
La distancia X que separa la partícula del origen O recibe el nombre de elonga-ción. El valor absoluto de la elongación máxima A se denomina amplitud. La cantidad
13/22
ωt+ψ (argumento del seno) se denomina fase del movimiento y ψ es la constante defase o fase inicial para t=0.
Durante el tiempo en que la fase aumenta en 2π , la partícula completa una oscila-ción, luego el periodo es T=2π/ω. La frecuencia ν del movimiento es el número deosci-laciones que se completan en la unidad de tiempo [ν=1/T (ciclos/s=herzios (Hz))].
La constante ω es la frecuencia angular o pulsación (ω=2πν=s-1).
La velocidad de la partícula que realiza un Movimiento Armónico simple vienedada por la derivada de la Elongación respecto del tiempo:
( )
++=+==
2sen..cos..
πψωωψωω tAtAdtdx
v
La aceleración de la partícula se determina haciendo la derivada de la velocidadrespecto del tiempo:
( ) XtAdtdv
a .sen.. 22 ωψωω −=+−==
Considerando a=F/m la fuerza que deberá actuar sobre una partícula para querealice un Movimiento Armónico Simple debe ser también proporcional a la Elongaciónde la partícula y de signo contrario a ésta:
F = m·a = -m·ω2x = -k.xdonde k = m·ω2 llamada constante armónica.
3.6. Composición de Movimientos Rectilíneos.
Si un cuerpo se halla sometido a dos movimientos simultáneos independientes,realiza un movimiento compuesto que resulta de la combinación de aquellos. La compo-sición de dos o más movimientos se realiza calculando el vector de posición del movi-miento resultante como suma de los vectores de posición de los movimientos compo-nentes.
Esto se apoya en el “Principio de Galileo” o de independencia de los movi-mientos: “Si un punto está dotado, por dos causas diferentes, de dos movimientossimultáneos, su cambio de posición es independiente de que los dos movimientos actúensucesiva o simultáneamente”.
De lo anterior se deduce que el vector de posición rρ
es la suma de los vectores deposición de los movimientos individuales:
...4321 ++++= rrrrrρρρρρ
y derivando: ...4321 ++++= vvvvvρρρρρ
o sea, la velocidad de un movimiento compuesto es, en todo momento, la suma vectorialde las velocidades de los movimientos componentes.
3.6.1. Descripción de Casos Elementales.
A) Un nadador que avanza en la dirección y sentido de la corriente (dos movimientosrectilíneos y uniformes en la misma dirección y sentido):
v = v1 + v2 a = 0 s = s1 + s2 = (v1 + v2) · t

14/22
B) Nadador que avanza en sentido contrario a la corriente (movimientos rectilíneos yuniformes de la misma dirección y de sentidos contrarios):
v = v1 - v2 a = 0 s = s1 - s2 = (v1 - v2) t (v1>v2)
C) Cuando un nadador se desplaza perpendicularmente a la corriente (movimientos rec-tilíneos y uniformes de direcciones perpendiculares):
22
2121
22
21 º90·cos2 vvvsivvvvv +==++= αα
el espacio recorrido será:[ ]tvvssss ·2
221
22
2
1+=→+=
y el ángulo de dirección resultante:
1
2
1
2tgs
s
v
v==θ
D) Dos movimientos rectilíneos uniformemente acelerados en la misma dirección:
++=
++=
2202022
2101011
21
·
21
·
tatvss
tatvss sumando:
221201020121 )(
21
).()( taatvvsssss o +++++=+=
taavvdtds
v )()( 210201 +++==
)( 21 aadtdv
a +==
E) Un movimiento uniforme y otro movimiento uniformemente acelerado en la mismadirección, dados por:
:·
21
·
·2
02022
01011
sumandoattvss
tvss
++=
+=
20201020121 2
1).()( attvvsssss ++++=+=
adtdv
aatvvdtds
v ==++== )( 0201
la aceleración es la misma del movimiento acelerado.
3.6.2. Movimiento parabólico de caída.
Por ejemplo, el lanzamiento de una bomba desde un avión que posee un movi-miento rectilíneo y uniforme de velocidad constante vx (la del avión) y un movimientorectilíneo y uniformemente acelerado perpendicular al anterior con velocidad variablevy=gt . En el instante inicial t=0, lógicamente vy=0 y el móvil sólo posee vx=cte. Encualquier instante de su trayectoria, las velocidades componentes son:
22222 tgvvvvgtv
ctevxyx
y
x +=+=
−==
15/22
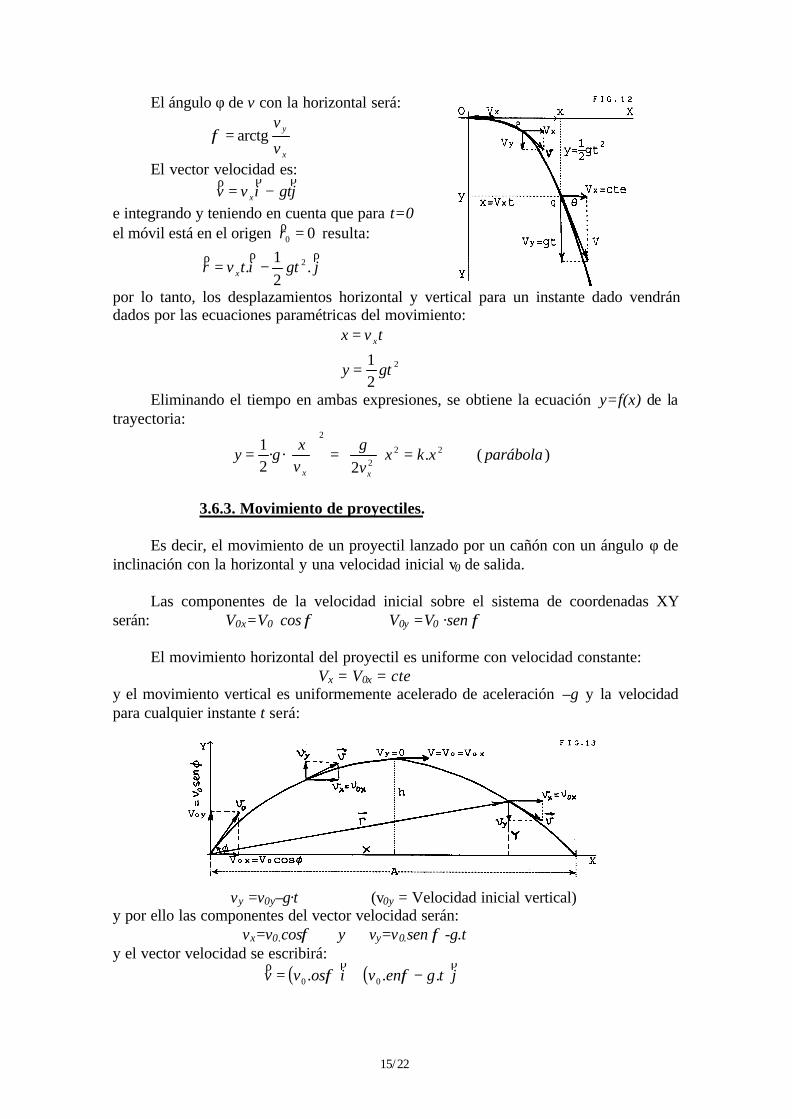
El ángulo φ de v con la horizontal será:
x
y
v
varctg=φ
El vector velocidad es:jgtivv x
ρρρ−=
e integrando y teniendo en cuenta que para t=0el móvil está en el origen 00 =rρ resulta:
jgtitvr x
ρρρ.
21
. 2−=
por lo tanto, los desplazamientos horizontal y vertical para un instante dado vendrándados por las ecuaciones paramétricas del movimiento:
2
21
gty
tvx x
=
=
Eliminando el tiempo en ambas expresiones, se obtiene la ecuación y=f(x) de latrayectoria:
)(.2
··21 22
2
2
parábolaxkxvg
vx
gyxx
=
=
=
3.6.3. Movimiento de proyectiles.
Es decir, el movimiento de un proyectil lanzado por un cañón con un ángulo φ deinclinación con la horizontal y una velocidad inicial v0 de salida.
Las componentes de la velocidad inicial sobre el sistema de coordenadas XYserán: V0x=V0 cos φ V0y =V0 ·sen φ
El movimiento horizontal del proyectil es uniforme con velocidad constante:Vx = V0x = cte
y el movimiento vertical es uniformemente acelerado de aceleración –g y la velocidadpara cualquier instante t será:
vy =v0y–g·t (v0y = Velocidad inicial vertical)y por ello las componentes del vector velocidad serán:
vx=v0.cosφ y vy=v0.sen φ -g.ty el vector velocidad se escribirá:
( ) ( ) jtgenviosvvρρρ
... 00 −+= φφ

. 16/22
Integrando, considerando que para t=0 es 00 == rr ρρ , resultará el vector deposición del movimiento parabólico del proyectil:
( ) jtgtvitvrρρρ
−+= 2
00 ..21
sen..cos.. φφ
de donde, los desplazamientos horizontal y vertical vendrán dados por lasecuaciones:
−=
=2
0
0
21
sen
cos
gttvy
tvx
φ
φ
que son las ecuaciones paramétricas del vector de posición: jyixrρρρ
+=
La ALTURA MÁXIMA se alcanzará en el instante t1 en el que la componentevertical de la velocidad se hace nula vy=0 o sea:
v0y=gt1 de donde g
v
g
vt y φ2
00
1
sen== y sustituyendo en y resulta:
g
vg
v
g
vg
gv
vyhφφφ
φφ 22
022
0
2
2200
0
sen.
21sensen
21
sensen
−=
−
==
o sea:g
vh
2
sen. 220 φ
=
El DESPLAZAMIENTO HORIZONTAL o ALCANCE se producirá en el instante t2en que el móvil vuelve a su altura inicial, es decir, cuando y=0 lo que dará como resul-tado una ecuación de segundo grado:
2220 2
1sen gttv =φ
con dos soluciones: t2 = 0 y g
vt
φsen2 02 =
La primera solución corresponde al instante de salida en el que se cumple y=0 y lasegunda solución corresponde al tiempo empleado en alcanzar el desplazamientohorizontal A y puede observarse que es el doble del empleado en alcanzar su alturamáxima, o sea: t2=2·t1.
La expresión del alcance A se obtendrá sustituyendo en la ecuación x=V0tcosφ elvalor de t2, resultando:
g
vg
vvxa
φφφ
φ cossen2·cos
sen2 200
0 =
== à
g
va
φ2sen20=
El alcance horizontal será máximo cuando la función sinusoidal de A sea máxima,es decir, cuando sen(2φ)=1 lo que ocurre cuando 2φ=90º, o sea, cuando φ=45º. Por otraparte, como los ángulos suplementarios tienen el mismo seno pueden considerarse dosángulos 2φ suplementarios, que den el mismo alcance, los cuales se obtendrán a partirde dos ángulos φ complementarios. Por ejemplo, para φ1=15º y φ2=75º se obtiene elmismo alcance, en el primer caso se tendría un tiro rasante y en el segundo se tendríaun tiro por elevación.

. 17/22
La velocidad total del proyectil en un instante dado vendrá dada por:
=−+=+= 20
220
22 )·sen(cos tgvvvvv yx φφ …
...sen.2sencos... 220
220
220 =+−+= tggtvvv φφφ
...)2sen.(2)cos(sen... 20
2220 =−−+= tgtvgv φφφ
gyv 2... 20 −=
y el ángulo que forma con la horizontal será: x
y
v
v=θtg
Sólo nos resta determinar la ecuación de la trayectoria descrita por el proyectil, esdecir, la ecuación y=f(x) obtenida al eliminar el tiempo en las ecuaciones paramétricas:
resultasegundalaendosustituyenyv
xt
gttvy
tvxφφ
φcos
21
sen
cos
020
0 =→
−=
=
( ) 2
220
220
2
00 ·
cos2·tg
cos21
sencos
xv
gx
v
xg
vx
vy
−=
−
=
φφ
φφ
φecuación de segundo grado del tipo y=ax2+bx+c donde los coeficientes son:
−=
φ220 cos2v
ga b=tg φ y c=0
por consiguiente la ecuación de la trayectoria corresponde a una parábola con la conca-vidad hacia abajo por ser a negativo, y que pasa por el origen por ser c=0.
3.6.4. Composición de Movimientos Armónicos Simples.
El caso más sencillo es la composición de movimientos armónicos simples de lamisma dirección y de la misma frecuencia.
Sean las ecuaciones de dichos movimientos, las siguientes:
+=+=
)·sen(
)·sen(
222
111
ψωψω
tAs
tAsdonde ψ1 y ψ2 son las fases iniciales.
como los desplazamientos tienen lugar en la misma dirección, por suma de las anterio-res ecuaciones, resulta:
( ) ( )221121 sensen ψωψω +++=+= tAtAsssTeniendo en cuenta las relaciones trigonométricas que nos dan el seno de una
suma de ángulos y reordenando términos, resulta:( ) ( ) tAAtAAs ωψψωψψ cossensensencoscos 22112211 +++= (#)
Sabiendo que el movimiento resultante ha de tener la misma dirección y la mismafrecuencia que las componentes, su ecuación será del tipo:
( )ψω += tAs sen. que desarrollando: ψωψω sen.coscos.sen. tAtSs +=e igualando a la anterior (#), las dos ecuaciones que resultan son:
2211 coscoscos. ψψψ AAA += (##)
2211 sensensen. ψψψ AAA +=Dividiendo ambas ecuaciones, tendremos:
. 18/22
2211
2211
coscos
sensentg
ψψψψ
ψAA
AA
++
=
que nos da la fase inicial del movimiento armónico resultante.
Por otra parte, si elevamos al cuadrado las anteriores ecuaciones (##) y las suma-mos miembro a miembro, obtenemos:
)·sensen·cos(cos2 21212122
21
2 ψψψψ +++= AAAAA
o sea: )·cos(··2 212122
21
2 ψψ −++= AAAAAque nos da el valor de la amplitud del movimiento armónico resultante.
Casos Particulares
a) Si la diferencia de fase entre los dos movimientos es un múltiplo par de π , o sea:ψ1-ψ2 = 2kπ resulta entonces:
cos(ψ1-ψ2) = 1 y por tanto A2 = (A1+A2)2 o sea A = A1+A2
b) Si la diferencia de fase entre los dos movimientos es un múltiplo impar de π , esdecir: ψ1-ψ2 = (2k+1)π resulta entonces:
cos(ψ1-ψ2) = -1 y por tanto A2 = (A1-A2)2 o sea A = A1-A2
4. MÉTODOS PARA EL ESTUDIO EXPERIMENTAL DE LOS MOVI-MIENTO
Están todos basados en la determinación de la velocidad del móvil en puntossingulares de su movimiento, al objeto de determinar la aceleración.
Mediante múltiples ensayos se obtienen tablas de valores de las variables calcula-das y se trasladan a gráficos diversos, mediante los cuales se demostrarán las ecuacionesde los movimientos. Aunque existen múltiples métodos de estudiar el movimiento,podemos reagruparlos en tres bloques:
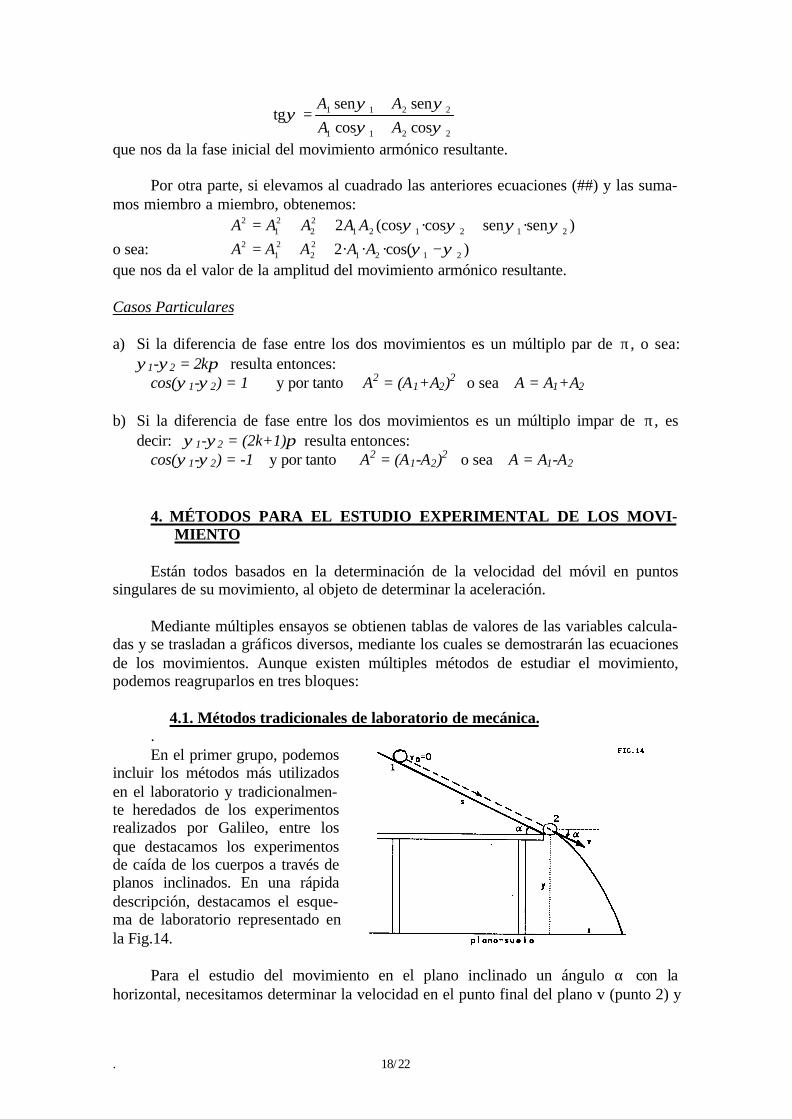
4.1. Métodos tradicionales de laboratorio de mecánica..En el primer grupo, podemos
incluir los métodos más utilizadosen el laboratorio y tradicionalmen-te heredados de los experimentosrealizados por Galileo, entre losque destacamos los experimentosde caída de los cuerpos a través deplanos inclinados. En una rápidadescripción, destacamos el esque-ma de laboratorio representado enla Fig.14.
Para el estudio del movimiento en el plano inclinado un ángulo α con lahorizontal, necesitamos determinar la velocidad en el punto final del plano v (punto 2) y
. 19/22
con ella y las magnitudes geométricas del plano (longitud del plano, ángulo deinclinación), puede determinarse la aceleración mediante la expresión cinemática:
asvv 220
2 =−donde v0=0 en el caso de un cuerpo que parta del reposo desde el punto de origen(punto 1).
Mediante el ángulo de inclinación del plano α, podemos relacionar la aceleracióndel movimiento con la aceleración de la gravedad, resultando:
a = g·sen αy aumentando o disminuyendo la longitud del plano y/o la inclinación del plano, puedenobtenerse distintos valores de la aceleración y a partir de ellos, obtener el valor de laaceleración de la gravedad.
El problema de determinar experimentalmente la velocidad v del punto final delplano inclinado (punto 2) queda resuelto midiendo las distancias: horizontal (x) y verti-cal (y) de caída del cuerpo en el plano-suelo y mediante las ecuaciones del movimientode caída parabólica:
x = v·t·cosαy = v·t·senα + g·t
se determinan tanto v como t (tiempo en la caída parabólica).
El experimento, una vez montado y realizado, permite medir las magnitudeslineales s, x e y, y a partir de ellas, se medirán v y t y de ellas se medirá a.
Núm. Deensayo
s x y v t
sv
s
vva
22
220
2
=−
=
1
Deben trasladarse los datos numéricos a gráficas adecuadas y hacerse un estudiode los errores cometidos.
4.2. Métodos de Fotografía estroboscópica.
Son métodos técnicamente más avanzados y precisos que los anteriores querequieren tecnología e instalaciones de mayor nivel que el habitual en los centros deenseñanza secundaria.
Se obtiene resultados muy precisos y permiten una comprobación muy exacta delas leyes de la cinemática.
El método consiste en fotografiar sobre el mismo negativo, la imagen de un objetoen movimiento, tantas veces como sea preciso, con intervalos muy reducidos de tiempoentre imagen e imagen. Se lleva a cabo en una sala-laboratorio oscura, en donde uncuerpo realiza un movimiento (caída libre, movimiento de proyectil, tiro oblicuo, movi-miento de rotación, movimiento armónico, choque de cuerpos, etc.). Una cámara foto-gráfica, adecuadamente enfocada sobre el objeto, se mantiene con el obturador abierto ymientras se realiza el movimiento se ilumina con una luz de flash intermitente, tal queentre destello y destello transcurra una fracción de segundo siempre constante.

. 20/22
T(seg) S(m) a(m/s2)
0’2 0’20 10’000’4 0’78 9’76
0’6 1’76 9’78
0’8 3’14 9’80
1’0 4’88 9’76
1’2 7’10 9’86
1’4 9’60 9’79
1’6 12’56 9’81
1’8 15’85 9’78
2’0 19’58 9’79
Se obtiene así, en el mismo negativo, unaserie de imágenes superpuestas correspondien-tes a intervalos de tiempo igualmente separadosa lo largo del intervalo total de tiempo.
El estudio de estos fotogramas, midiendolas distancias entre los cuerpos, permite obtenertablas de datos de distancias y de tiempos quetrasladados a gráficos permiten la comproba-ción de las leyes de la Cinemática.
Multitud de fotografías obtenidas coneste método aparecen en los textos de Física,demostrativos de los movimientos diversos delos cuerpos.
4.3. Métodos de Laboratorio Asistido por Ordenador. (L.A.O.)
Son los métodos actuales más avanzados y exactos, fáciles de realizar y conequipos y materiales al alcance de los centros de enseñanza secundaria.
Requieren, no obstante, aparatos muy modernos y sofisticados, entre los quedestacamos:
- Un ordenador personal y todo el equipo que le acompaña.- Programa de Software de Laboratorio Asistido por Ordenador, (L.A.O.).- Interface de transformación y transformación de datos.- Materiales de laboratorio específicos para cada práctica.
Se requiere además conocimientos avanzados en el manejo de sistema operativodel ordenador, bases de datos, hojas de cálculo y manejo de programas de usuario.
El montaje, representado en la figura 16, incluye un plano inclinado, donde va atener lugar el movimiento objeto de estudio. En puntos adecuados (1 y 2) y a distancias
. 21/22
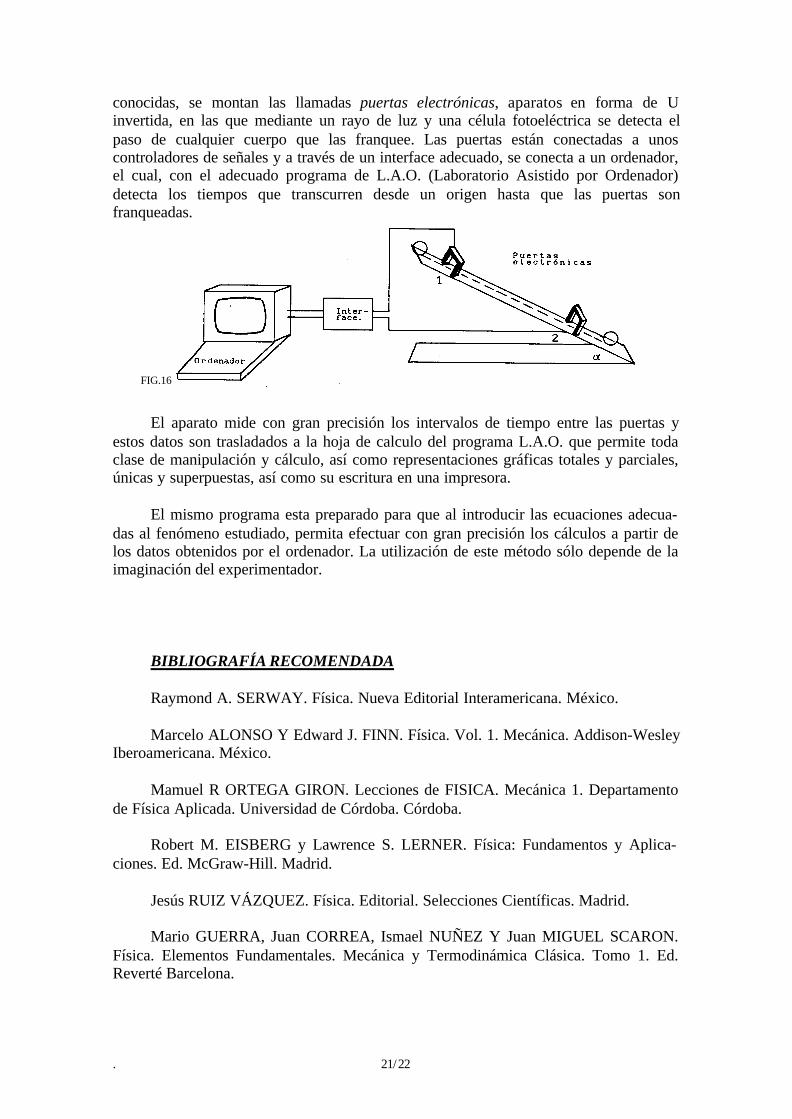
conocidas, se montan las llamadas puertas electrónicas, aparatos en forma de Uinvertida, en las que mediante un rayo de luz y una célula fotoeléctrica se detecta elpaso de cualquier cuerpo que las franquee. Las puertas están conectadas a unoscontroladores de señales y a través de un interface adecuado, se conecta a un ordenador,el cual, con el adecuado programa de L.A.O. (Laboratorio Asistido por Ordenador)detecta los tiempos que transcurren desde un origen hasta que las puertas sonfranqueadas.
FIG.16
El aparato mide con gran precisión los intervalos de tiempo entre las puertas yestos datos son trasladados a la hoja de calculo del programa L.A.O. que permite todaclase de manipulación y cálculo, así como representaciones gráficas totales y parciales,únicas y superpuestas, así como su escritura en una impresora.
El mismo programa esta preparado para que al introducir las ecuaciones adecua-das al fenómeno estudiado, permita efectuar con gran precisión los cálculos a partir delos datos obtenidos por el ordenador. La utilización de este método sólo depende de laimaginación del experimentador.
BIBLIOGRAFÍA RECOMENDADA
Raymond A. SERWAY. Física. Nueva Editorial Interamericana. México.
Marcelo ALONSO Y Edward J. FINN. Física. Vol. 1. Mecánica. Addison-WesleyIberoamericana. México.
Mamuel R ORTEGA GIRON. Lecciones de FISICA. Mecánica 1. Departamentode Física Aplicada. Universidad de Córdoba. Córdoba.
Robert M. EISBERG y Lawrence S. LERNER. Física: Fundamentos y Aplica-ciones. Ed. McGraw-Hill. Madrid.
Jesús RUIZ VÁZQUEZ. Física. Editorial. Selecciones Científicas. Madrid.
Mario GUERRA, Juan CORREA, Ismael NUÑEZ Y Juan MIGUEL SCARON.Física. Elementos Fundamentales. Mecánica y Termodinámica Clásica. Tomo 1. Ed.Reverté Barcelona.
. 22/22
Tratamiento Didáctico----------------------------------------------------------------------------------------------------------OBJETIVOS
Estudio sistemático del movimiento como fenómeno más importante de la Física.Establecer los conceptos básicos del movimiento (posición, velocidad, aceleración)
sentándolos sobre sólidos razonamientos matemáticos.Iniciar al alumno en las técnicas experimentales, aplicándolas al estudio del movi-
miento y entrenarlo en el trabajo de laboratorio.UBICACIÓN
El tema puede iniciarse en 3º curso de ESO de una manera sistemática, aunque ele-mental (en los niveles anteriores sólo se introducen unas nociones muy básicas) y conmás profundidad en el 4º de la E.S.O.
En 1º curso de Bachillerato, el tema se expondrá con rigor conceptual, ya plena-mente apoyado en el lenguaje matemático y vectorial y utilizando las bases del cálculodiferencial.TEMPORALIZACIÓN
En el nivel de mayor extensión se dedicarán ocho horas de clase al tema del movi-miento completado con resolución de problemas numéricos.
Dos horas dedicadas a la realización de prácticas de laboratorio.En los niveles inferiores los tiempos de dedicación al tema serán menores.
METODOLOGÍAExplicación de los conceptos del movimiento mediante metodología activa, basán-
donos en movimientos de la vida real y adaptándolos a situaciones teóricas para su estu-dio matemático.
Deberá completarse con la resolución de problemas numéricos diversos, conutilización exclusiva del Sistema Internacional de unidades.
Debe inculcarse a los alumnos la idea del trabajo personal en la resolución de pro-blemas, imprescindible para la comprensión y el razonamiento de los conceptos físicos.CONTENIDOS MÍNIMOS
Concepto de relatividad del movimiento.Concepto de Posición, Velocidad y Aceleración.Características de los movimientos fundamentales y sus ecuaciones.Sistema Internacional de unidades cinemáticas.
MATERIALES Y RECURSOS DIDÁCTICOSLibro de Texto, complementado con apuntes tomados en clase de las explicaciones
del profesor, subrayando los conceptos y ecuaciones más importantes.Material de laboratorio sencillo y adecuado a prácticas de movimiento utilizando
planos inclinados, bolas de acero, cronómetros, reglas, nonius, etc.Hojas de problemas que constituyan una colección de problemas escogidos, de difi-
cultad creciente, adaptados al nivel del curso y referentes al tema.EVALUACIÓN
Pruebas objetivas sobre los conceptos fundamentales del tema, valorando compren-sión, memorización y aplicación de estos conceptos.
Pruebas prácticas sobre resolución de problemas.Valoración de las prácticas realizadas en el aula o en el laboratorio.Pruebas de opción múltiple. El tema es idóneo para confeccionar pruebas de varias
respuestas (3 falsas y 1 verdadera) que obligará al alumno al razonamiento de las situa-ciones planteadas. La corrección debe ajustarse a las normas tradicionales de este tipode pruebas.