sistemas de control aplicados a la robÓtica de robot 1/… · 1805 h. maillardet construyó una...
TRANSCRIPT

Universidad de Costa Rica Facultad de Ingeniería
Escuela de Ingeniería Eléctrica Departamento de Automática
IE – 431 Sistemas de Control
MONOGRAFÍA:
SISTEMAS DE CONTROL APLICADOS A LA ROBÓTICA
GRUPO: 06
INTEGRANTES: Marco A. Carit 960650
Marvin Coto 981156
Mario E. Fung 951147
PERIODO: 1er Semestre de 2002
IE-431 SISTEMAS DE CONTROL APLICADO A LA ROBOTICA
Grupo 06 1er Semestre de 2002
i
TABLA DE CONTENIDO
1.0 Introducción.................................................................................................. 2
1.1 Origen de la palabra robot y su significado .......................................................................... 2 1.2 Propiedades características de los robots: ............................................................................. 4 2.0 Desarrollo ...................................................................................................... 5
2.1 El robot y su funcionamiento .............................................................................................. 5 2.2 Clasificación de los robots: ............................................................................................... 6 2.3 Campos de la robótica........................................................................................................ 7 2.4 Elementos funcionales de control en robótica .................................................................... 8
2.4.1 Estructura mecánica ..................................................................................................... 8 2.4.2 Control de movimientos............................................................................................... 8 2.4.3 Grados de libertad. ..................................................................................................... 10
2.5 ACTUADORES................................................................................................................ 12 2.5.1 ACTUADORES HIRAULICOS................................................................................ 12 2.5.2 ACTUADORES ELECTRICOS................................................................................ 13
2.6 Elementos de Control:....................................................................................................... 14 2.7 El control en la manipulación de robots............................................................................ 14
2.7.1 El control cinemático. ................................................................................................ 15 2.7.2 El Método Analítico................................................................................................... 17 2.7.3 Solución numérica...................................................................................................... 17 2.7.3 Síntesis de la trayectoria. ........................................................................................... 19 2.7.4 Modelo dinámico del robot. ....................................................................................... 19 2.7.5 Modelo matemático.................................................................................................... 19
3.0 Conclusiones…………………………………………………………………………….30
4.0. Bibliografía......................................................................................................................32
IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
1
RESUMEN Para comenzar con el presente trabajo, se hace una breve descripción de la palabra robot,
seguido por un cronograma que muestra el gran empeño puesto por los distintos inventores y desarrolladores en esta materia, que el día de hoy ha alcanzado niveles imaginables solo en ciencia ficción. Seguidamente se enumeran propiedades características y de funcionamiento que presentan este tipo de sistemas, con una clasificación de los mismos así como campos de desempeño.
Entrando en materia propiamente, se enuncian propiedades como la estructura mecánica, control de movimiento y grados de libertad de los mecanismos, con una descripción completa de los actuadores y sensores, con sus distintas modalidades y tipos, llegando a los elementos de control, descritos por modelos matemáticos y dinámicos.
Se describe una síntesis de los servo sistemas, se linealiza el modelo del ROBOT y se enuncian los distintos métodos para el control del los mismos.
Finalmente se describen algunas aplicaciones de la robótica y de los sistemas de control, así como conclusiones importantes obtenidas en este trabajo.

IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
2
1.0 Introducción Origen de la palabra robot y su significado
A través de la historia el hombre a soñado con seres capaces de realizar movimientos y hasta comportarse parecido a animales y hasta seres humanos; en el fondo el ser humano lo que piensa es librarse de tareas indeseables, peligrosas o demasiados tediosas. La primera vez que se hablo de estos seres utilizando el término por el que es hoy mundialmente conocido, robot, fue en 1923 por el escritor Karel Capek en su comedia R.U.R.(“Rossum’s Universal Robots”), palabra que proviene del término checo robotnik que significa siervo.
Hoy la palabra robot tiene diferentes significados:
• La del Robot Institute of América: “un manipulador multifuncional y reprogramable, diseñado para mover materiales piezas, herramientas o dispositivos especiales, mediante movimientos programables y variables que permitan llevar a cabo diversas tareas”.
• La del Oxford English dictionary: “un aparato mecánico que se parece y hace el trabajo de un ser humano”
Cronograma sobre la historia de la robótica: FECHA DESARROLLO SigloXVIII. A mediados del J. de Vaucanson construyó varias muñecas mecánicas de
tamaño humano que ejecutaban piezas de música 1801 J. Jaquard invento su telar, que era una máquina programable para la
urdimbre 1805 H. Maillardet construyó una muñeca mecánica capaz de hacer dibujos. 1946 El inventor americano G.C Devol desarrolló un dispositivo controlador
que podía registrar señales eléctricas por medio magnéticos y reproducirlas para accionar un máquina mecánica. La patente estadounidense se emitió en 1952.
1951 Trabajo de desarrollo con teleoperadores (manipuladores de control remoto) para manejar materiales radiactivos. Patente de Estados Unidos emitidas para Goertz (1954) y Bergsland (1958).
1952 Una máquina prototipo de control numérico fue objetivo de demostración en el Instituto Tecnológico de Massachusetts después de varios años de desarrollo. Un lenguaje de programación de piezas denominado APT

IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
3
(Automatically Programmed Tooling) se desarrolló posteriormente y se publicó en 1961.
1954 El inventor británico C. W. Kenward solicitó su patente para diseño de robot. Patente británica emitida en 1957.
1954 G.C. Devol desarrolla diseños para Transferencia de artículos programada. Patente emitida en Estados Unidos para el diseño en 1961.
1959 Se introdujo el primer robot comercial por Planet Corporation. estaba controlado por interruptores de fin de carrera.
1960 Se introdujo el primer robot ‘Unimate’’, basada en la transferencia de articulaciones programada de Devol. Utilizan los principios de control numérico para el control de manipulador y era un robot de transmisión hidráulica.
1961 Un robot Unimate se instaló en la Ford Motors Company para atender una máquina de fundición de troquel.
1966 Trallfa, una firma noruega, construyó e instaló un robot de pintura por pulverización.
1968 Un robot móvil llamado ‘Shakey’’ se desarrollo en SRI (standford Research Institute), estaba provisto de una diversidad de sensores así como una cámara de visión y sensores táctiles y podía desplazarse por el suelo.
1971 El ‘Standford Arm’’, un pequeño brazo de robot de accionamiento eléctrico, se desarrolló en la Standford University.
1973 Se desarrolló en SRI el primer lenguaje de programación de robots del tipo de computadora para la investigación con la denominación WAVE. Fue seguido por el lenguaje AL en 1974. Los dos lenguajes se desarrollaron posteriormente en el lenguaje VAL comercial para Unimation por Víctor Scheinman y Bruce Simano.
1974 ASEA introdujo el robot Irb6 de accionamiento completamente eléctrico. 1974 Kawasaki, bajo licencia de Unimation, instaló un robot para soldadura por
arco para estructuras de motocicletas. 1974 Cincinnati Milacron introdujo el robot T3 con control por computadora. 1975 El robot ‘Sigma’’ de Olivetti se utilizó en operaciones de montaje, una de
las primitivas aplicaciones de la robótica al montaje. 1976 Un dispositivo de Remopte Center Compliance (RCC) para la inserción
de piezas en la línea de montaje se desarrolló en los laboratorios Charles Stark Draper Labs en estados Unidos.
1978 El robot T3 de Cincinnati Milacron se adaptó y programó para realizar operaciones de taladro y circulación de materiales en componentes de aviones, bajo el patrocinio de Air Force ICAM (Integrated Computer- Aided Manufacturing).
1978 Se introdujo el robot PUMA (Programmable Universal Machine for Assambly) para tareas de montaje por Unimation, basándose en diseños

IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
4
obtenidos en un estudio de la General Motors. 1979 Desarrollo del robot tipo SCARA (Selective Compliance Arm for Robotic
Assambly) en la Universidad de Yamanashi en Japón para montaje. Varios robots SCARA comerciales se introdujeron hacia 1981.
1980 Un sistema robótico de captación de recipientes fue objeto de demostración en la Universidad de Rhode Island. Con el empleo de visión de máquina el sistema era capaz de captar piezas en orientaciones aleatorias y posiciones fuera de un recipiente.
1981 Se desarrolló en la Universidad de Carnegie - Mellon un robot de impulsión directa. Utilizaba motores eléctricos situados en las articulaciones del manipula dor sin las transmisiones mecánicas habituales empleadas en la mayoría de los robots.
1982 IBM introdujo el robot RS-1 para montaje, basado en varios años de desarrollo interno. Se trata de un robot de estructura de caja que utiliza un brazo constituido por tres dispositivos de deslizamiento ortogonales. El lenguaje del robot AML, desarrollado por IBM, se introdujo también para programar el robot SR-1.
1983 Informe emitido por la investigación en Westinghouse Corp. bajo el patrocinio de National Science Foundation sobre un sistema de montaje programable adaptable (APAS), un proyecto piloto para una línea de montaje automatizada flexible con el empleo de robots.
1984 Robots 8. La operación típica de estos sistemas permitía que se desarrollaran programas de robots utilizando gráficos interactivos en una computadora personal y luego se cargaban en el robot.
Propiedades características de los robots:
• Versatilidad:
Potencialidad estructural de ejecutar tareas diversas y/o ejecutar una misma tarea de forma diversa. Esto impone al robot una estructura mecánica de geometría variable.
• Auto adaptabilidad al entorno:
Significa que un robot debe, por sí solo, alcanzar su objetivo (ejecutar su tarea) a pesar de las perturbaciones imprevistas del entorno a lo largo de la ejecución de su tarea. Esto supone que el robot sea consciente de su entorno y que por lo tanto posea sentidos artificiales.

IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
5
2.0 Desarrollo
2.1 El robot y su funcionamiento
Un robot operacional puede estar constituido por cuatro entidades unidas entre sí:
1. Sistema mecánico articulado dotado de sus motores (eléctricos, hidráulicos o neumáticos) que arrastran a las articulaciones del robot mediante las transmisiones (cables, cintas, correas con muescas). Para conocer en todo instante la posición de las articulaciones se recurre a los captadores (codificadores ópticos) que se denominan propioceptivos. Estos dan el valor a las articulaciones, que no es más que la configuración o el estado del robot.
2. El entorno es el universo en que está sumergida la primera entidad. Si los robots están sobre un puesto fijo se reduce al espacio alcanzable por el robot. En él el robot puede encontrar obstáculos que ha de evitar y objetos de interés, o sea los objetos con los que tiene que actuar. Por todo esto existe interacción entre la parte física y el entorno. Mediante los captadores exteroceptivos (cámaras, detectores de fuerzas, detectores de proximidad, captadores táctiles) se toman informaciones sobre el entorno.
3. Las tareas a realizar es el trabajo que se desea que haga el robot. La descripción de estas tareas se hace mediante lenguajes que pueden ser a través de los gestos, en el que se le enseña al robot lo que se debe hacer; orales, se le habla; o por escrito en el que se le escriben las instrucciones en un lenguaje compatible con el robot.
4. El cerebro del robot es el órgano de tratamiento de la información. Este puede ser desde un autómata programable para los menos avanzados hasta un mini ordenador numérico o microprocesador para los más avanzados. El cerebro, es el que tiene el papel principal, contiene en sus memorias:
Un modelo del robot físico: las señales de excitación de los accionadores y los desplazamientos que son consecuencia de ellas.
Un modelo del entorno: descripción de lo que se encuentra en el espacio que puede alcanzar.
Programas: permite comprender las tareas que se le pide que realice. Algoritmos de control.

IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
6
2.2 Clasificación de los robots
CRITERIO CLASIFICACIÓN
Geometría Se basa en la forma del área de trabajo producida por el brazo del robot: rectangular, cilíndrica o esférica. La configuración polar utiliza coordenadas polares para especificar cualquier posición en términos de una rotación sobre su base, un ángulo de elevación y una extensión lineal del brazo. La configuración cilíndrica sustituye un movimiento lineal por uno rotacional sobre su base, con los que se obtiene un medio de trabajo en forma de cilindro.
Configuraciones
La configuración de coordenadas cartesianas posee tres movimientos lineales, y su nombre proviene de las coordenadas cartesianas, las cuales son más adecuadas para describir la posición y movimiento del brazo. Los robots cartesianos a veces reciben el nombre de XYZ, donde las letras representan a los tres ejes del movimiento.
Grados de libertad Consiste en contar el número de grados de libertad que tengan. Se considera un grado de libertad cada eje a lo largo del cual se puede mover el brazo de un robot. Ensamblaje Área de aplicación No ensamblaje: soldar, pintar, revestir, manejo de materiales y carga y descarga de maquinaria. Lazo cerrado: se monitorea continuamente la posición del brazo del robot mediante un sensor de posición, y se modifica la energía que se manda al actuador de tal forma que el movimiento del brazo se obedece al camino deseado, tanto en dirección como en velocidad. Éste control se puede usar cuando la tarea que se ha de llevar a cabo está dirigida mediante un camino definido por la misma pieza, tal como sería soldar, revestir y ensamblar.
Técnica de control
En un sistema de lazo abierto, el controlador no conoce la posición de la herramienta mientras el brazo se mueve de un punto a otro. Éste tipo de control es muy usado cuando el movimiento que debe seguir el brazo se encuentra determinado previamente, al ser grabado con anterioridad y reproducido sin cambio alguno, lo cual es útil cuando todas las piezas a ser tratadas son exactamente iguales.
IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
7
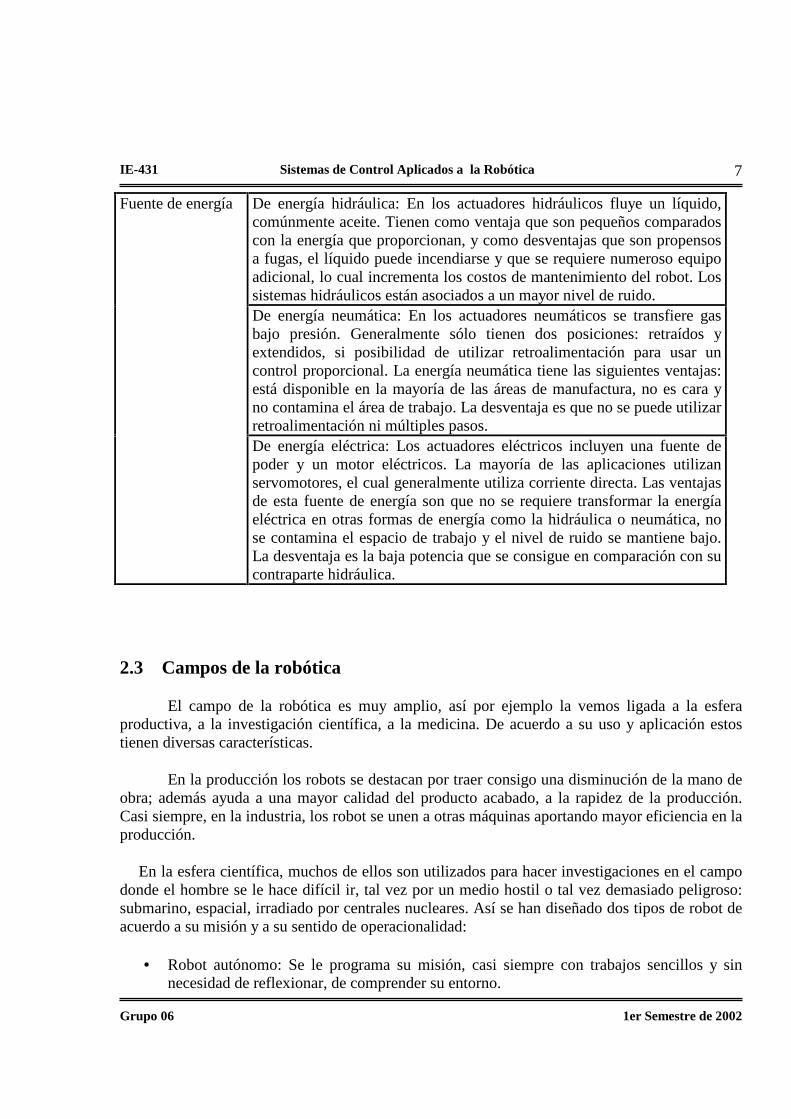
De energía hidráulica: En los actuadores hidráulicos fluye un líquido, comúnmente aceite. Tienen como ventaja que son pequeños comparados con la energía que proporcionan, y como desventajas que son propensos a fugas, el líquido puede incendiarse y que se requiere numeroso equipo adicional, lo cual incrementa los costos de mantenimiento del robot. Los sistemas hidráulicos están asociados a un mayor nivel de ruido. De energía neumática: En los actuadores neumáticos se transfiere gas bajo presión. Generalmente sólo tienen dos posiciones: retraídos y extendidos, si posibilidad de utilizar retroalimentación para usar un control proporcional. La energía neumática tiene las siguientes ventajas: está disponible en la mayoría de las áreas de manufactura, no es cara y no contamina el área de trabajo. La desventaja es que no se puede utilizar retroalimentación ni múltiples pasos.
Fuente de energía
De energía eléctrica: Los actuadores eléctricos incluyen una fuente de poder y un motor eléctricos. La mayoría de las aplicaciones utilizan servomotores, el cual generalmente utiliza corriente directa. Las ventajas de esta fuente de energía son que no se requiere transformar la energía eléctrica en otras formas de energía como la hidráulica o neumática, no se contamina el espacio de trabajo y el nivel de ruido se mantiene bajo. La desventaja es la baja potencia que se consigue en comparación con su contraparte hidráulica.
2.3 Campos de la robótica
El campo de la robótica es muy amplio, así por ejemplo la vemos ligada a la esfera productiva, a la investigación científica, a la medicina. De acuerdo a su uso y aplicación estos tienen diversas características.
En la producción los robots se destacan por traer consigo una disminución de la mano de obra; además ayuda a una mayor calidad del producto acabado, a la rapidez de la producción. Casi siempre, en la industria, los robot se unen a otras máquinas aportando mayor eficiencia en la producción.
En la esfera científica, muchos de ellos son utilizados para hacer investigaciones en el campo donde el hombre se le hace difícil ir, tal vez por un medio hostil o tal vez demasiado peligroso: submarino, espacial, irradiado por centrales nucleares. Así se han diseñado dos tipos de robot de acuerdo a su misión y a su sentido de operacionalidad:
• Robot autónomo: Se le programa su misión, casi siempre con trabajos sencillos y sin necesidad de reflexionar, de comprender su entorno.

IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
8
• Teleoperación o telepresencia: Esta máquina está controlada a distancia por un puesto maestro monitoreado por el operador(hombre).
En el campo de la medicina, o bien podríamos llamarle asistencia individual se destacan por la ayuda en la asistencia médica de personas paralíticas, personas con partes del cuerpo amputadas. La robótica entonces cubre campos como:
• Prótesis: creación de manos y piernas artificiales. • Órtesis: estructuras rígidas motorizadas que se ponen alrededor del miembro paralizado y
lo arrastran en su movimiento. • Telétesis: destinadas a los paralíticos de los cuatro miembros(tetrapléjicos) y son robots
que el afectado controla a distancia a partir de las zonas de motrocidad voluntaria que haya podido conservar(por ejemplo: la lengua, los músculos de los ojos).
2.4 Elementos funcionales de control en robótica
2.4.1 Estructura mecánica
Los robots deben tener una estructura mecánica para mover un objeto, y también deben tener una parte llamada “ end effector” , que se utiliza para sostener una herramienta o sujetar un objeto.
Una estructura típica es la mostrada en la figura 1, donde el robot está hecho de enlaces discretos rígidos con motores que actúan sobre las junturas entre los enlaces.
IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
9
2.4.2 Control de movimientos
Dada una estructura particular, será necesario determinar los movimientos requeridos de cada parte del mecanismo para que el “ end effector” pueda ser movido a la posición requerida y orientación en el espacio.
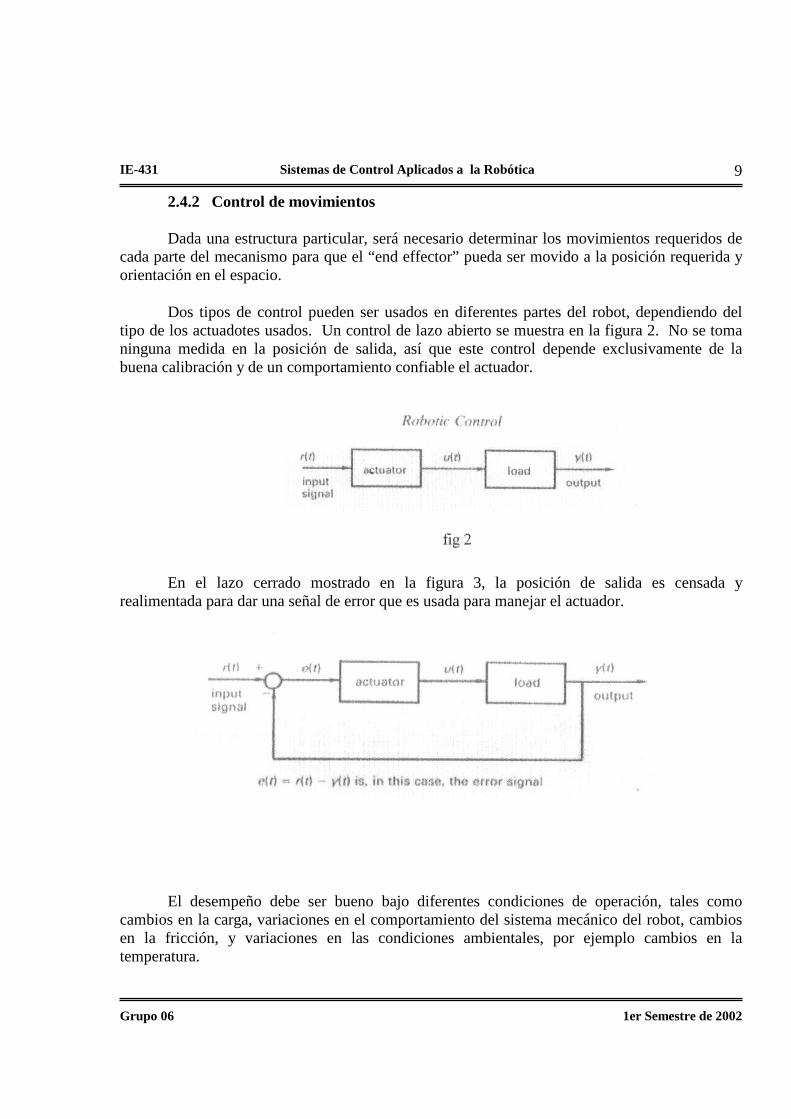
Dos tipos de control pueden ser usados en diferentes partes del robot, dependiendo del tipo de los actuadotes usados. Un control de lazo abierto se muestra en la figura 2. No se toma ninguna medida en la posición de salida, así que este control depende exclusivamente de la buena calibración y de un comportamiento confiable el actuador.
En el lazo cerrado mostrado en la figura 3, la posición de salida es censada y
realimentada para dar una señal de error que es usada para manejar el actuador.
El desempeño debe ser bueno bajo diferentes condiciones de operación, tales como cambios en la carga, variaciones en el comportamiento del sistema mecánico del robot, cambios en la fricción, y variaciones en las condiciones ambientales, por ejemplo cambios en la temperatura.
IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
10
Para hacer efectivo el sistema de control, los actuadotes deben usarse para manipular las partes elementales de la estructura mecánica. Si se usa el lazo cerrado, deben haber censores para medir el estado de las posiciones en las uniones. Algunas veces las señales de velocidad y aceleración son medidas directamente.
Los requerimientos para altas velocidades y aceleraciones, y mayor precisión, requieren un estudio del comportamiento dinámico del robot.
2.4.3 Grados de libertad.
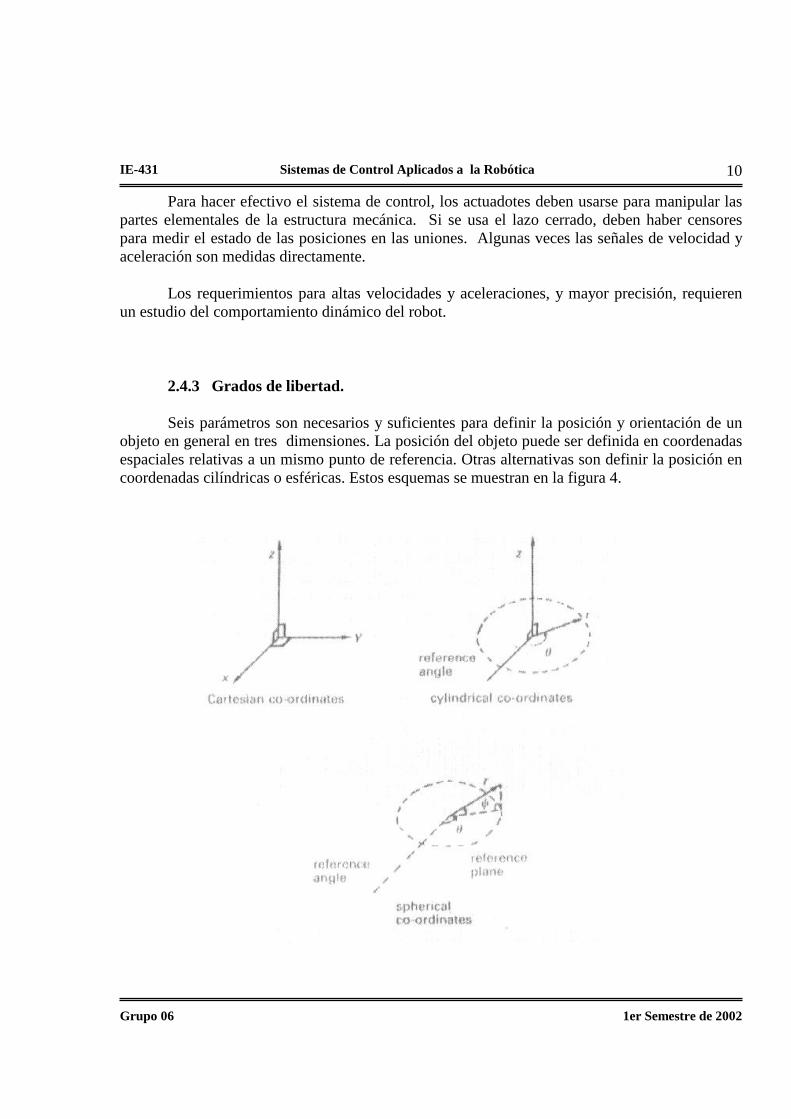
Seis parámetros son necesarios y suficientes para definir la posición y orientación de un objeto en general en tres dimensiones. La posición del objeto puede ser definida en coordenadas espaciales relativas a un mismo punto de referencia. Otras alternativas son definir la posición en coordenadas cilíndricas o esféricas. Estos esquemas se muestran en la figura 4.
IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
11
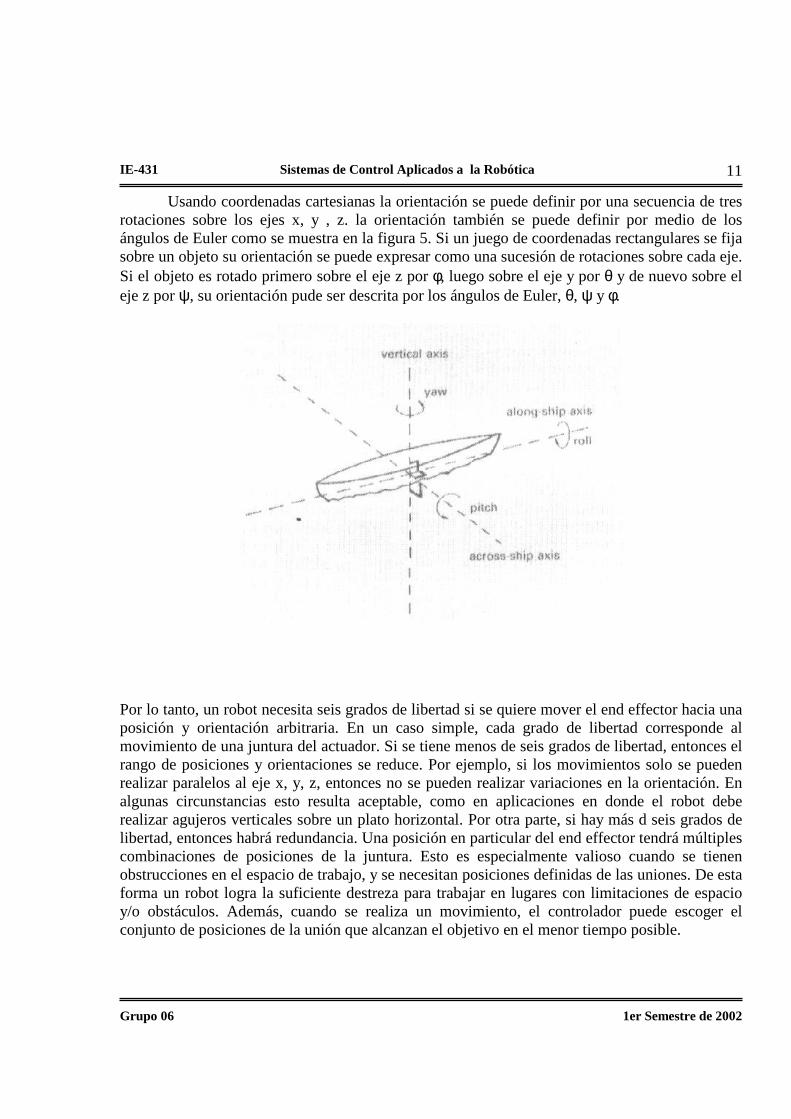
Usando coordenadas cartesianas la orientación se puede definir por una secuencia de tres rotaciones sobre los ejes x, y , z. la orientación también se puede definir por medio de los ángulos de Euler como se muestra en la figura 5. Si un juego de coordenadas rectangulares se fija sobre un objeto su orientación se puede expresar como una sucesión de rotaciones sobre cada eje. Si el objeto es rotado primero sobre el eje z por φ, luego sobre el eje y por θ y de nuevo sobre el eje z por ψ, su orientación pude ser descrita por los ángulos de Euler, θ, ψ y φ.
Por lo tanto, un robot necesita seis grados de libertad si se quiere mover el end effector hacia una posición y orientación arbitraria. En un caso simple, cada grado de libertad corresponde al movimiento de una juntura del actuador. Si se tiene menos de seis grados de libertad, entonces el rango de posiciones y orientaciones se reduce. Por ejemplo, si los movimientos solo se pueden realizar paralelos al eje x, y, z, entonces no se pueden realizar variaciones en la orientación. En algunas circunstancias esto resulta aceptable, como en aplicaciones en donde el robot debe realizar agujeros verticales sobre un plato horizontal. Por otra parte, si hay más d seis grados de libertad, entonces habrá redundancia. Una posición en particular del end effector tendrá múltiples combinaciones de posiciones de la juntura. Esto es especialmente valioso cuando se tienen obstrucciones en el espacio de trabajo, y se necesitan posiciones definidas de las uniones. De esta forma un robot logra la suficiente destreza para trabajar en lugares con limitaciones de espacio y/o obstáculos. Además, cuando se realiza un movimiento, el controlador puede escoger el conjunto de posiciones de la unión que alcanzan el objetivo en el menor tiempo posible.

IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
12
2.5 ACTUADORES
Los actuadores son los dispositivos encargados de efectuar acciones físicas ordenadas por algún sistema de control. Esta acción física puede ser un movimiento lineal o un movimiento circular según sea el caso.
El proceso bajo control, la acción que se tiene que llevar a cabo y la velocidad con que
ésta deba realizarse, son factores que influyen en la clase de actuador que se ha de utilizar. Generalmente se consiguen tres tipos de actuadores: los hidráulicos, los eléctricos y los
neumáticos; de los cuales se explican los dos primeros a continuación: 2.5.1 ACTUADORES HIDRAULICOS
Los actuadores hidráulicos son los que han de utilizar un fluido a presión, generalmente
un tipo de aceite, para que el robot pueda movilizar sus mecanismos. Los actuadores hidráulicos se utiliza para robots grandes, los cuales presentan mayor velocidad y mayor resistencia mecánica.
Para las aplicaciones que exijan una carga útil pesada (por lo general, mayor de 5
Newtons y tan alta como 1000 Newtons), el dispositivo hidráulico es el sistema a elegir. Los altos índices entre potencia y carga, la mayor exactitud, la respuesta de mayor frecuencia con un desempeño más suave a bajas velocidades y el amplio rango de velocidad, son algunas de las ventajas del acondicionamiento hidráulicos sobre los actuadores neumáticos.
La presión es aplicada de la misma manera que la neumática en un émbolo que se
encuentra dentro de un compartimiento hermético. Este se encuentra acoplado mecánicamente a un vástago que se mueve linealmente de acuerdo a la presión aplicada. Los cálculos para la fuerza ejercida por un cilindro hidráulico son las mismas que para los cilindros neumáticos.
Sin embargo, poseen una diferencia fundamental; el cilindro hidráulico del mismo
tamaño que el neumático produce una mayor fuerza. Las principales aplicaciones la podemos encontrar en máquinas troqueladoras, en cargadores y en maquinarias pesada para obras civiles.
Para la aplicación de los actuadores hidráulicos, se necesita de una bomba que envíen al
líquido también a presión a través de una tubería o de mangueras especiales para el transporte del mismo.
Estos actuadores son de poco uso en la industria si lo comparamos con la acogida de los
actuadores neumático y eléctrico; esto se debe entre otras cosas a los grandes requisitos para el

IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
13
espacio de piso y las condiciones de gran riesgo provenientes del escurrimiento de fluidos de alta presión.
En esta clase de actuadores también encontramos cilindros de simple o de doble efecto y
en cuanto a los elementos de control y protección son muy similares a los sistemas neumáticos.
2.5.2 ACTUADORES ELECTRICOS
Se le da el nombre de actuadores eléctricos cuando se usa la energía eléctrica para que el
robot ejecute sus movimientos. Los actuadores eléctricos se utilizan para robots de tamaño mediano, pues éstos no requieren de tanta velocidad ni potencia como los robots diseñados para funcionar con actuadores hidráulicos. Los robots que usan la energía eléctrica se caracterizan por una mayor exactitud y repetibilidad.
Los sistemas de acondicionamiento eléctrico han llegado a ser los que más predominan
en los ambientes robóticos industriales. Aunque no proporcionan la velocidad o la potencia de los sistemas hidráulicos, los dispositivos eléctricos ofrecen una mayor exactitud y repetitividad, necesitan de un menor espacio de piso y, como consecuencia, son muy adecuados para el trabajo preciso, como el ensamblaje.
Por lo general, los robots se pueden accionar con un acondicionamiento eléctrico, por
medio de los motores paso a paso o de los servomotores. En la actualidad, los motores paso a paso predominan en los robots “ instructores” pequeños, los cuales se emplean en las instituciones educativas o en los ambientes de laboratorios automatizados.
Una salida de un motor paso a paso consiste en incrementos de movimiento angular
discreto iniciado por una serie de pulsos eléctricos discretos. Los robots dirigidos por un motor paso a paso se utilizan para aplicaciones de trabajo ligero, debido a que una carga pesada puede ocasionar una pérdida de pasos y la subsecuente inexactitud.
Los servomotores de corriente continua proporcionan un control excelente con los
requisitos de mantenimiento mínimos. El control del momento de torsión es posible si, respectivamente, se controlan el voltaje o la corriente que se aplican al motor. Las ventajas que tales motores ofrecen incluyen un momento de torsión elevado, un tamaño pequeño de estructura y una carga ligera, así como una curva de velocidad lineal, lo cual reduce el esfuerzo computacional.
Los actuadores de solenoide utilizan el principio de la atracción electromagnética para
producir el movimiento el movimiento mecánico. La mayor ventaja es su velocidad de respuesta, ya que el movimiento es casi instantáneo al flujo de corriente eléctrica. Sin embargo una de sus desventajas es su tamaño comparado con la fuerza que produce. En el momento que se energiza la bobina, el campo magnético creado por ésta, hace que la armadura se deslice hacia ella,

IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
14
logrando con esto, que el vástago presente un movimiento lineal igual al de la armadura. Cuando la bobina se desenergiza, el resorte hace que el vástago regrese a su posición de reposo.
2.6 Elementos de Control:
Contactores: Son actuadores que sirven de interface entre los mandos de control y los
actuadores eléctricos de mayor potencia. Por medio de la excitación eléctrica de una bobina, el magnetismo creado por ella, atrae un dispositivo mecánico que a su vez conmuta uno o varios interruptores mecánicos que pueden manejar corrientes elevadas.
Los contactores más comunes poseen bobinas de control a 110 o 220 voltios y contienen
un juego de 4 interruptores conmutables, uno como auxiliar y los otros tres utilizados para las fases de la corriente trifásica utilizada comúnmente en la industria.
Relés: Son mecanismos electromagnéticos, que conmutan uno o varios contactos
eléctricos por medio de la fuerza electromagnética, generada por paso de la corriente de control a través de su bobina.
Elementos de Protección: Disyuntores: Son simplemente interruptores o bloqueadores, que se encargan de aislar la
corriente de potencia de entrada, de los diferentes sistemas eléctricos controlados. Estos son instalados serialmente con las líneas de potencia y vienen diseñados para soportar determinadas corrientes de tal manera que si sobrepasa el límite, este se activa y aísla la corriente eléctrica de potencia. Deben ser instalado en el circuito antes del contactor.
Relé Térmico: Su función es la de proteger los diferentes dispositivos a las sobre-
corrientes. Deben ser instalados después del contactor, de tal manera que brinde seguridad en caso de que uno de sus contactos se quede pegado o no funcione correctamente, corriendo el riesgo de dejar solo dos fases, lo que ocasionaría grandes daños a los sistemas conectados a éste.
2.7 El control en la manipulación de robots.
Existen numerosos factores que deben considerarse en lo que concierne al control del
robot tales como las acciones a realizarse, características estructurales y dinámicas del robot y el equipo existente para la realización del control.

IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
15
Como en muchos otros sistemas el control del robot puede ser realizado por técnicas
análogas, híbridas o con la utilización de microprocesadores. La comunicación entre la unidad de control del robot y el usuario se realiza ya sea a
través de una terminal o una caja técnica. La caja técnica es un método más simple pero no permite sistemas de control muy complejos. Por otra parte el sistema de control recibe la información a través de los sensores y éste la transforma para que pueda utilizarse dentro de la trayectoria del robot a nivel estratégico de control. En el nivel táctico de control el movimiento asignado al brazo es mapeado dentro de las trayectorias de unión del robot. La ejecución de este mapeo generalmente requiere numerosos cálculos matemáticos. Cuando la posición y velocidad deseada se determina, ésta se realiza en el nivel ejecutivo. Este nivel permanentemente genera señales a las entradas de los actuadores cuya labor es colocar las uniones del robot en la posición deseada.
El control ejecutivo puede realizarse por métodos análogos o con la ayuda de un
microprocesador en cuyo caso la unidad de control del robot contiene un computador para la implementación de niveles más altos de control y con análogos de los servo sistemas y actuadores para mover las uniones del robot. En los últimos tiempos la implementación de microcomputadores a nivel ejecutivo ha aumentado ya que el proceso análogo contiene en algunos casos grandes niveles de complejidad. Los microcomputadores reciben la información del estado instantáneo de la unión del robot de los sensores a través de convertidores analógico-digital y a través de convertidores digital-analógico envía la dirección deseada a los actuadores. Además de esto el control directo digital de los robots permite el desarrollo de controladores a nivel general que puede aplicarse a diferentes tipos de robots con diferentes estructuras lo cual no puede lograrse por medio de la técnica análoga. Sin embargo, la ley de control utilizada a nivel ejecutivo siempre debe ser aquella que de la manera más simple posible pueda satisfacer los requerimientos deseados de tal manera que se evitan largos procesos en paralelo.
2.7.1 El control cinemático.
En este punto se estudiarán los problemas relacionados al nivel táctico de control en el cual se busca interrelacionar las variables externas del robot con las internas.
La labor elemental que existe al controlar un robot es llevar el mismo a la posición deseada del área de trabajo. Lo que se necesita es primero llevar al robot de su posición inicial a la pieza de trabajo a una distancia tal que el brazo pueda alcanzarla.
Para ejecutar esta labor el brazo debe estar orientado correctamente y así lograr atrapar la pieza. El siguiente paso es atrapar la pieza y finalmente llevarla a la nueva posición. Cabe recalcar que esta nueva posición será también la nueva posición del brazo y por tanto requiere una nueva posición del manipulador.
IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
16
El único real problema en esta ejecución es el justo posicionamiento del robot y la pieza que carga. Debe notarse que los brazos mecánicos con realimentación abierta también pueden posicionarse pero su capacidad de reprogramar la posición deseada es muy limitada cuando se compara con los robots.
En principio existen 2 maneras ya mencionadas de asignar las coordenadas del
robot: a través de las coordenadas internas (o llamadas “ coordenadas de unión” ) y a través de las coordenadas externas del robot.
Las coordenadas internas están definidas por valores escalares que describan la posición
relativa de un punto respecto a otro punto del mismo par cinemático. Estas coordenadas se denotan por q i y el vector de coordenadas internas de un brazo con n uniones es q=(q 1 ,q 2 ,...q n ).
Las coordenadas externas son las coordenadas cartesianas de un punto especifico del
robot con respecto al marco absoluto de coordenadas unido a la base del manipulador o a cualquier otro punto en el espacio de trabajo. A éste vector se le llama “ s” y en el caso general está formado por m coordenadas donde m es el número de coordenadas necesitadas para describir la posición del brazo en una clase de labor particular.
Como es conocido los robots son alimentados a través de actuadores de varios tipos en la
mayoría de los casos una manipulación de unión es manejada por un actuador. El movimiento del actuador se transforma entonces en el movimiento de la unión
correspondiente. Cada actuador tiene su propio servo sistema el cual controla el actuador y lo lleva a la posición deseada. Por lo tanto a cada actuador se le debe asignar la posición a obtenerse. Para cada unión es necesario definir un ángulo o desplazamiento qoi a ser obtenido, y éste ángulo es la entrada al servo sistema correspondiente.
Es claro que hay una relación entre las coordenadas internas y externas del robot.
Para cada valor del vector interno corresponde un valor del vector externo de esta manera s=f(q) donde f representa la función de transformación del vector interno de coordenadas al vector externo de coordenadas. Esta función de transformación es llamada “ el problema cinemático directo” e involucra la determinación de coordenadas externas dadas las coordenadas internas.
Sin embargo, lo más común es que la labor esté indicada en coordenadas externas por lo cual uno de los mayores problemas en robótica es determinar las coordenadas internas correspondientes a las dadas coordenadas externas. Esto se logra por medio de la transformación inversa: q0 =f-1(s0). La determinación de la función inversa se llama “ el problema cinemático inverso” . Esta función depende de las dimensiones de s y q:
1. m=n: para este caso es posible determinar un q único dado un s específico. 2. m>n: no es posible encontrar un q que satisfaga s.
IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
17
3. m<n: existen más de una solución q que satisface s. Esta es la llamada “ manipulación redundante” .
Ya que la relación f es una función trigonométrica no lineal resolver el problema inverso es equivalente a encontrar la solución a un set de ecuaciones no lineales. Existen dos métodos conocidos para encontrar ésta solución: el método analítico y el método numérico.
2.7.2 El Método Analítico.
Para algunas estructuras de robot es posible obtener una solución analítica del problema
inverso mientras que para otras no. Para obtener una solución inversa en forma analítica es necesario dividir el problema en 2 subproblemas: La determinación de la solución por las tres primeras coordenadas también llamada “ configuración mínima” y luego las restantes tres coordenadas que están relacionadas usualmente con el brazo del robot.
Una vez que se tiene la posición de mínima configuración determinada, es posible
encontrar una solución analítica al problema inverso y así encontrar las tres primeras coordenadas. Una vez que se conocen éstas la orientación de mínima configuración está determinada y esto permite encontrar las siguientes 3 coordenadas del movimiento esférico de la unión que satisfacen la orientación deseada.
En algunas estructuras de robot al igual que en manipuladores redundantes no es posible
encontrar una solución analítica al problema inverso por lo que es necesario una visión numérica del problema.
2.7.3 Solución numérica.
En esencia el problema inverso representa la solución de un set de ecuaciones trigonométricas no lineales. Para aquellos robots en los cuales la solución analítica no es aplicable el problema se resuelve por un método estándar numérico.
Primero que nada se busca la derivación respecto al tiempo de la función f de esta
manera:
’)(’’ xqqJqq
fs =
∂∂= (1)
donde J(q) es la matriz Jacobiana de las derivadas parciales de f con dimensión mxn.

IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
18
Cuando el valor de m es igual a n la matriz Jacobiana es cuadrática y es invertible
de esta manera:
’)(’ 1 sqJq −= (2)
Cuando m>n no es posible encontrar un q’ correspondiente a s’ y cuando m<n es el caso de manipuladores redundantes para el cual la solución no es única y se requiere un criterio adicional para determinar un único q’ correspondiente a s’ dado. Una posibilidad es adoptar la solución mínima inversa el cual da un q’ que de acuerdo al criterio de error cuadrático mínimo es el más cercano a la solución exacta:
’)(’ 1 sJJJq TT −= (3)
Sin embargo, para este procedimiento se ha considerado que las velocidades de las
coordenadas externas son conocidas. A medida que la posición del robot deseada está normalmente en términos de las coordenadas externas es necesario resolver el problema inverso para la posición s 0 dada. El Jacobiano inverso puede usarse para la solución numérica del problema inverso respecto a la posición de la siguiente manera: dado las coordenadas externas y un vector aproximado de la solución q K se puede encontrar q K+1 por medio del método de Newton para la solución de ecuaciones no lineales.
Lo visto anteriormente se refiere a la manipulación de labores que requieren solamente el
control de posición. Aún en estos días esta es la aplicación más común en la industria. Sin embargo, en muchas ocasiones la determinación de la posición no es suficiente aunque si necesaria para asegurar que el movimiento de un lado a otro del robot sea el correcto. En muchos casos el robot se maneja dentro de un ambiente no vacío que contiene obstáculos por lo cual la trayectoria del robot debe ser definida de tal manera que el robot evite colisionar con los obstáculos. Además en algunas aplicaciones es necesario que el robot se mueva a lo largo de un camino particular como por ejemplo a la hora de pintar donde el robot debe aplicar la pintura uniformemente. En algunos casos incluso es necesario mantener una velocidad constante durante el trayecto del robot.
En el caso de control de velocidad la solución del problema es generalmente más simple
que en el de posición ya que el inverso del Jacobiano siempre puede ser encontrado si m=n. Sin embargo, a la hora de la práctica éste puede complicarse ya que el Jacobiano es una función compleja de todas las coordenadas internas y su inversión no es sencilla.

IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
19
2.7.3 Síntesis de la trayectoria.
Es necesario establecer como la trayectoria del robot se sintetiza para lograr el movimiento del brazo.
La trayectoria del brazo del robot puede ser asignada de diferentes maneras, una de las
cuales es la enseñanza del robot en la cual el operador guía al mismo a lo largo de la trayectoria deseada y el sistema guarda el conjunto de puntos por el que el robot pasa.
El sistema de control genera la trayectoria al igual que las velocidades y aceleraciones en
términos de coordenadas externas. Estas coordenadas son transformadas en el nivel táctico a trayectorias de unión. Esta conversión puede realizarse por cálculo directo de las coordenadas, cálculo de las velocidades o cálculo de las aceleraciones.
La generación de trayectorias en términos de coordenadas internas y externas puede
realizarse ya sea fuera de ejecución o durante la misma. Es visible que en los casos más elementales la generación de trayectorias es sencilla, sin embargo, si los caminos involucrados se complican el problema se complica aún más. Es especialmente complejo si el tiempo de movimiento no está dado pero se requiere que sea mínimo. El problema de minimización del tiempo al lo largo de un camino dado y el problema de la distribución óptima de la velocidad del robot puede ser enfrentado a través de un modelo dinámico completo del robot.
2.7.4 Modelo dinámico del robot.
El sistema dinámico consiste de mecanismos actuadores que manejan las uniones del mecanismo y el sistema de control. El modelo matemático de las dinámicas de la parte mecánica del sistema y el modelo delos actuadores se consideraron en detalle al principio. Ahora se presentará el modelo matemático brevemente solo con el objetivo de entender la síntesis de control y el nivel ejecutivo.
2.7.5 Modelo matemático.
La parte mecánica del robot es un mecanismo complejo que consiste de varios cuerpos. Estos cuerpos están conectados entre sí por uniones. A este tipo de mecanismo se le llama “ una cadena abierta cinemática” . Se va considerar cada cuerpo como rígido y despreciar la elasticidad de los mismos. Además las uniones pueden ser rotacionales o lineales. Para simplificar el modelo se considerará que cada unión es manejada por un actuador diferente el cual produce una fuerza o momento alrededor de la unión correspondiente. El movimiento de la i-ésima unión está descrita por la coordenada interna correspondiente qi que representa el ángulo entre dos cuerpos colindantes o el desplazamiento lineal entre ambos.
IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
20
Al anotar todas las ecuaciones de momento para cada una de las n uniones del mecanismo se obtiene un modelo completo del mecanismo entero. Este modelo dinámico puede ser escrito matricialmente así:
)’,(")( qqhqqHP += (4) donde p es el vector de torques, H es la matriz de inercia y h es el vector de dimensión.
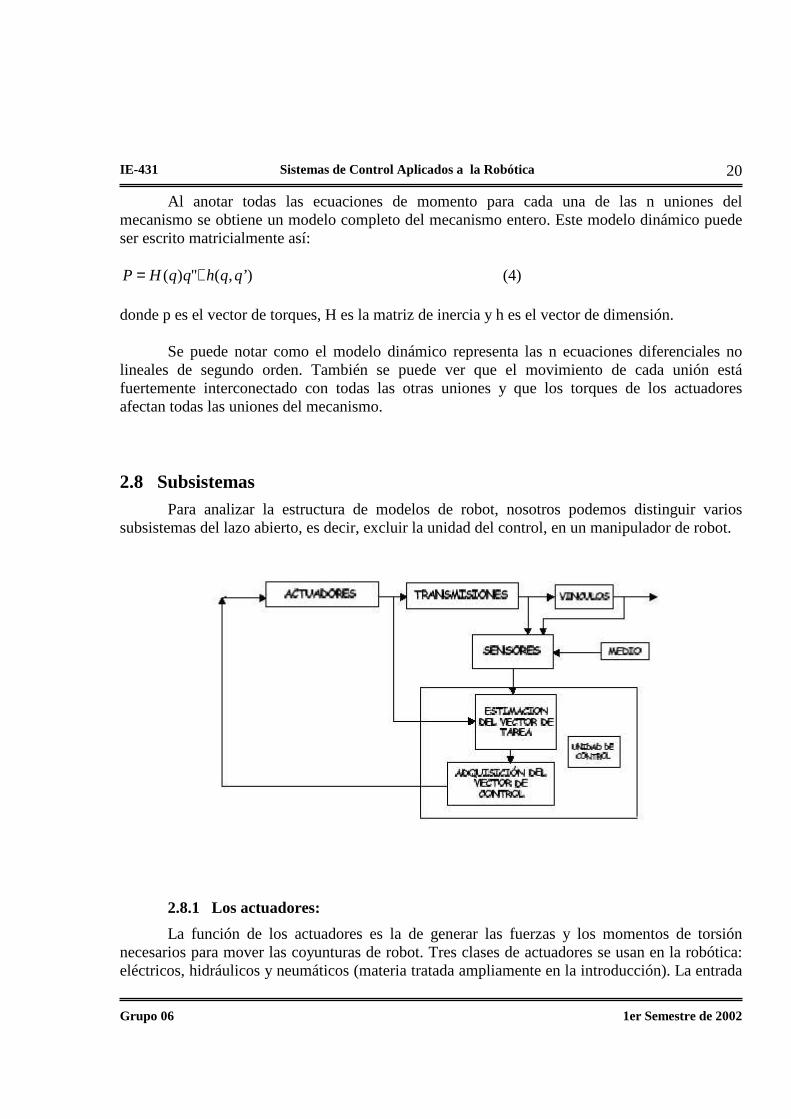
Se puede notar como el modelo dinámico representa las n ecuaciones diferenciales no lineales de segundo orden. También se puede ver que el movimiento de cada unión está fuertemente interconectado con todas las otras uniones y que los torques de los actuadores afectan todas las uniones del mecanismo. 2.8 Subsistemas
Para analizar la estructura de modelos de robot, nosotros podemos distinguir varios subsistemas del lazo abierto, es decir, excluir la unidad del control, en un manipulador de robot.
2.8.1 Los actuadores:
La función de los actuadores es la de generar las fuerzas y los momentos de torsión necesarios para mover las coyunturas de robot. Tres clases de actuadores se usan en la robótica: eléctricos, hidráulicos y neumáticos (materia tratada ampliamente en la introducción). La entrada
IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
21
del control es clásicamente una corriente o un voltaje y la variable de la salida es una corriente (momento de torsión) o una presión líquida.
Las dificultades inducidas por los actuadores surgen principalmente de no-linealidad, por ejemplo los límites y la saturación de motores de DC. Nos concentraremos en los motores DC clásicos.
2.8.2 Las transmisiones:
La función de las transmisiones es en general de darse cuenta ambas de una adaptación
de la impedancia mecánica y para transmitir los momentos de torsión engendrados por los actuadores a las coyunturas. Cuando los motores convencionales de DC son usados, sus velocidades de eje son generalmente mucho más altas que las velocidades de coyunturas requeridas, mientras sus momentos de torsión nominales son demasiado bajos. Las transmisiones se diseñan para aumentar el momento de torsión disponible en las coyunturas, y reducir la velocidad angular por una razón llamada “ razón de transmisión” .
Los artefactos de la transmisión generalmente encontrados en robots, y en desordenes
asociados, son de tres clases principales: los engranajes (responsables de la mayoría de las fricciones secas en un robot manipulador), los cables y las fajas (cuando los espacios para las transmisiones son limitados y en robots industriales), y las manivelas y palancas (usados con artefactos de reducción).
Las transmisiones por lo tanto son responsables de una proporción grande de los disturbios internos no-lineales en un sistema de robótica. Además, estos disturbios son a menudo los modelos no-inmóviles, y “ razonables” que están raramente disponibles. Las consecuencias principales de esta situación son: una pérdida de la precisión y la generación de vibraciones que dirigen a la fatiga mecánica, o a problemas de estabilidad.
2.8.3 El manipulador mecánico:
Por supuesto, la función de este subsistema es de realizar los desplazamientos físicos, o los movimientos, de cuerpos rígidos escogidos dentro del espacio de trabajo de tres dimensiones del robot, con relación a la tarea asignada. Las variables de la entrada son los momentos de torsión, y las salidas son las aceleraciones.
2.8.4 Los sensores
Un sensor es un dispositivo que proporciona una medida de una cantidad física deseada. La salida es generalmente una señal eléctrica que puede estar conforme a ruido y a disturbios extraños. Las clases principales de sensores son los siguientes:

IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
22
1. Sensores internos : Estos sensores miden posiciones comunes y velocidades directamente. La medida de posiciones angulares (o lineales) es generalmente bastante fácil, con los potenciómetros, discernidores de imágenes, codificadores digitales, transformadores diferenciados. 2. Sensores externos : Estos sensores miden interacciones entre ellos mismos y el entorno. Una dificultad, al usar tales sensores, está al extraer y utilizar la parte de la información más útil a la aplicación. 2.9 Modelo total
El sistema robótico consiste tanto de la parte mecánica como de los actuadores. Por ello el siguiente paso es combinar ambos modelos en un modelo total. La relación entre los actuadores y el sistema mecánico es por medio de coordenadas y momentos. La rotación del actuador se transforma en el movimiento de la unión. Esta relación está dada de la siguiente manera: θi = gi(q)i. Además la relación entre el momento del actuador y el torque del mecanismo está dado por una relación similar: Mi * =zi (qi)Pi. Sin embargo, para simplicidad del sistema se considerará que z=1 y g igual a la variable q.
Al combinar ambos modelos y las relaciones antes mencionadas en un único sistema de
ecuaciones diferenciales se obtiene el siguiente modelo: )(*)()(’ uNxBxax += (5) donde
( )[ ] ( ) )()()()()( 11 xhTFxHIFxTAxHTFxHIfAxa nn−− −+−+= (6)
TBxHTFxHIFBxB n )())(()( 1−−+= (7)
Este modelo es conocido como el modelo centralizado del robot mientras que el modelo anterior se llama “ el modelo descentralizado” .
IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
23
2.9.1 Síntesis de un servosistema.
El control táctico genera una posición deseada de las coordenadas internas y envía esta información al control ejecutivo el cual debe realizarlas. Por tanto la labor del control ejecutivo es asegurar la conducción de la unión del robot a la posición deseada o a través de la trayectoria buscada.
Para este análisis será considerado la unión i-ésima y su actuador correspondiente como
el objeto en movimiento y se asumirán el resto delas uniones como fijas en una posición. Para encontrar la descripción del modelo simplificada se no considerará además el efecto
de la gravedad y de esta manera se llega a un modelo en variables de estado como el mencionado anteriormente. Este modelo describe el comportamiento del actuador correspondiente al unión i-ésima. Hay que sintetizar también el control que asegurará que la posición impuesta por el nivel de control superior. Para esto primero se considerará el caso cuando sólo se debe asegurar la posición y luego se agregará el problema de la trayectoria. Esto se conoce como “ el controlador estático” y el “ controlador dinámico” .
2.9.2 Elementos del servosistema.
El sistema a controlar puede ser descrito por un modelo lineal invariante en el tiempo. El
controlador debe asegurar que para cada posición impuesta el actuador lleve la unión a su destino. Este trabajo puede realizarse por un servosistema clásico de posición. A continuación se explicarán brevemente los elementos del mismo.
El detector de errores de señal es un elemento que reconoce el error y lo convierte a un
voltaje proporcional a este error. Este error es dado por una diferencia entre la posición actual de la unión y la posición deseada de la misma.
Los amplificadores son elementos cuya labor es amplificar la variable en cuestión.
Existen amplificadores de error de posición, de realimentación de velocidad y otros. Estos amplificadores son considerados elementos no dinámicos.
El electro motor y la parte mecánica del robot es el elemento que consiste en el actuador y la parte mecánica del robot la cual rota sobre el eje de la i-ésima unión.
El taco-generador se utiliza como sensor de velocidad. Su salida es un voltaje
proporcional a la velocidad del movimiento. El sensor de posición es un elemento que tiene varios tipos de componentes. Este se
utiliza para medir la posición actual de la unión.

IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
24
2.9.3 Métodos para la síntesis de un servosistema.
Existen diferentes métodos aplicables a diferentes servosistemas. El servo sistema en el dominio de s es un método que se desarrolla al combinar las funciones de transferencia del servo. Al elegir los elementos la función de transferencia depende solamente en la selección de las ganancias en la realimentación de posición y velocidad.
Un segundo método es la síntesis por medio de ubicación de polos. Este método sintetiza
la realimentación de las ganancias utilizando el modelo en variables de estado del sistema. La síntesis por medio de este modelo se reduce a escoger la ganancia necesaria que satisfaga los requerimientos. Este procedimiento es muy conocido dentro de los sistemas de control.
Para simplificación del análisis no se considerarán los efectos de la variación de la inercia
y el momento de gravedad pero es importante recordar que existen y pueden afectar la estabilidad. Tampoco se considerarán los efectos no lineales que existen en un servo sistema como: limitación de amplitud, fricción estática y dinámica y otros.
2.9.3 Síntesis del controlador PID
Al permitir que otras uniones se muevan simultáneamente con la unión i-ésima, un momento externo, debido al acople dinámico, actúa sobre la unión i-ésima. Los efectos de este momento pueden ser compensados en parte por medio de un servomecanismo dinámico. En este servomecanismo los lazos de realimentación por las integrales de las coordenadas del sistema aparecen. Se considerará el caso más simple, conocido como el controlador PID, en el cual se introduce el lazo de realimentación por la integral del error.
Se pueden utilizar varios métodos para sintetizar las ganancias de realimentación: en
dominio de frecuencia, métodos de localización de las raíces, etc. También se pueden usar métodos relacionados al sistema en variables de estado como colocación de polos, acercamiento óptimo del regulador, etc.
En la utilización de los PID se puede lograr mejores resultados en cuestión del modelo
dinámico del sistema, sin embargo, este momento dinámico es una compleja función de coordenadas de unión. Por tanto, es necesario asegurarse de que el error debido al momento externo variable sea lo más pequeño posible. Es posible introducir un controlador de orden superior pero estos son muy complejos y pocas veces se utilizan en el control de robots.

IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
25
2.9.4 Síntesis de servosistemas para seguimiento de trayectorias.
En aspectos modernos de la robótica, se requiere no sólo lograr que un robot llegue a un destino definido sino que pueda seguir una trayectoria específica. Esto significa que la entrada del servosistema no es la constante de posición de la unión pero su trayectoria.
Como la entrada va a variar con el tiempo, el sistema debe asegurarse de que la salida
varíe con el tiempo también. Si la entrada del sistema no es precisa, el robot se atrasará en su trayectoria. En este momento aparecerá un error entre la trayectoria actual y la deseada. Conforme la trayectoria se complique, este error aumentará. Es claro entonces que este error es una consecuencia de atrasos en el servosistema. Sin embargo este atraso puede compensarse introduciendo un precompensador (o realimentación hacia adelante)
La alimentación hacia adelante se introduce de la siguiente manera: la señal de entrada no
es la trayectoria deseada pero una señal modificada que toma en cuenta el atraso en el servo. Proporcionalmente se agrega una señal cuya labor es acelerar el sistema a la entrada original. Esta señal adicional debe reducir el error entre la trayectoria impuesta y la trayectoria actual de la unión.
2.9.5 Control de movimientos simultáneos en las uniones.
Si las uniones del robot se mueven de manera simultánea, estos movimientos son dinámicamente acoplados: el movimiento de cada unión afecta el movimiento de todas las uniones.
Se considera que cada unión está controlada por un servomecanismo, el cual considera
que solo la unión en cuestión se mueve. Al considerar el movimiento total existen variables a considerar las cuales se van simplemente a mencionar para no complicar más el análisis. Estas son: momento de inercia, inercia cruzada, momento de gravedad, fuerzas centrífugas y fuerzas de coriolis (torques).
2.10 Linealización del modelo de un robot Anteriormente se ha analizado el modelo del robot como un modelo no lineal, sin
embargo es posible linealizar este modelo de tal manera que su análisis sea mucho más sencillo. El modelo en su forma centralizada está descrito por la ecuación (5). Para poder linealizar este modelo se realizó un procedimiento matemático que llegó al siguiente modelo:

IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
26
),()()( 000 uuNxBxxAx LL ∆+∆=∆ (8)
donde
x
xxaAL ∆∂
∆∂= ),( 0
(9)
)0,( 0xBBL = (10)
Las matrices pueden encontrarse de diferentes maneras:
• Pueden ser obtenidas analíticamente. Esto significa que se puede escribir el modelo dinámico original en su forma analítica y analíticamente determinar cuanto son las matrices.
• Por medio de métodos numéricos. Existen numerosos métodos numéricos que pueden ser integrados dentro de un computador digital.
• Por procedimientos de identificación: se asume que el modelo dinámico no lineal del robot es accesible y basado en este modelo se puede determinar numéricamente el modelo lineal que describa el mismo comportamiento que el sistema en cuestión.
Para analizar estabilidad de un modelo lineal de control de un robot el método más utilizado
es encontrar los autovalores de la matriz del modelo lineal. Este procedimiento busca que todos los autovalores se encuentren del lado izquierdo del plano complejo. Se logra buscando los ceros del determinante de la matriz AL. El principal problema de este procedimiento es determinar los autovalores pues la matriz puede ser de un orden alto y puede ser compleja su solución.
El análisis de estabilidad anteriormente mencionado puede aplicarse cuando existen otras
leyes de control funcionando en el sistema como la ley descentralizada.
2.11 Control dinámico del robot
Durante los movimientos simultáneos del robot aparecen fuerzas dinámicas (torques), que afectan el servo sistema local. Si estos servo sistemas no pueden vencer tales fuerzas se debe compensar los efectos que éstas producen por medio de lazos de control adicionales. Esta “ ley” de control, que justifica las características dinámicas de los sistemas del robot se llama “ control dinámico de robots” . Se puede considerar varias formas del control dinámico, entre las cuales tenemos el control dinámico global.

IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
27
2.11.1 Control dinámico global
Si los servo sistemas locales pueden reunir los requisitos impuestos por las fuerzas no
sería necesario introducir ningún lazo de control adicional. Sin embargo, si los servo sistemas no garantizan tal situación, se debe reelegir el servo sistema local o se debe introducir un control global adicional. El reelegir el servo sistemas locales usualmente significan un aumento en los grados de la estabilidad de los subsistemas locales lo que a su vez significa un aumento en la ganancia de la realimentación del servo sistema. Las ganancias altas de la realimentación no son aceptables ya que quizás alteren las estructuras resonantes oscilacilatorias y también debido al efecto del ruido que causan en los servo sistemas.
Si no se puede aumentar más las ganancias locales de realimentación, y si no se
logra la certeza requerida de rastrear trayectorias entonces es cuando se debe introducir un lazo adicional de realimentación global.
2.11.2 Realimentación de fuerza como control global
La función Pi debe estar relacionada con las fuerzas dinámicas que actúan respecto al
servosistema como acople entre uniones, Pi* puede igualarse con el momento dinámico actual Pi, tomando en cuenta “ uniones dinámicas” hiiq”ii.
iiiii qHPP "* −= (11)
El control global compensa por las fuerzas dinámicas, las cuales se miden por medio de sensores.
El esquema de control incluye el control en forma de realimentación de fuerzas. Esta
realimentación de fuerzas presenta algunas ventajas:
• Estructura de control simple. La introducción de este lazo no implica realmente la estructura en lo que respecta al control descentralizado.
• Mínimo cómputo: no requiere cómputo adicional, ya que la información del transductor de fuerza proporciona toda la información para el acople.
• Robustez en la variación de parámetros: como los trasductores proporcionan la información necesaria, esta información no depende de los parámetros de los actuadotes y del mecanismo del robot.

IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
28
Sin embargo, también existen algunas desventajas en este proceso:
• Problemas técnicos en la implementación de los trasductores de fuerza: para poder medir las fuerzas directamente que actúan en la unión, es necesario construir los trasductores directamente en el actuador.
• El precio de los trasductores: como los sensores de fuerza deben ser de alta calidad para lograr una medición precisa de las fuerzas puede tener un costo elevado.
• Ruido en los trasductores de fuerza: estos instrumentos, al igual que otros sensores, siempre incluyen en su salida un nivel de ruido.
2.11.3 Cómputo en línea de las fuerzas dinámicas para el control global
Otra manera de implementar la función Pi* para control global es a través de cómputo en línea de los momentos de unión. A través de potenciómetros en las uniones se puede obtener información acerca de la posición actual todas las uniones qi. Con la ayuda de un tacogenerador, se obtiene la información necesaria para computar valores reales de la matriz de inercia H(q) y el vector de momentos centrífugos, Coriolis y de gravedad h(q,q´). Si alimentamos la información de posición y velocidad de los sensores a un microcomputador de control, se puede computar estos elementos del modelo dinámico del mecanismo del robot. Basándose en los modelos de los actuadores, además es posible determinar las aceleraciones de las uniones q ´´i , o también se pueden calcular estas aceleraciones por medio de la derivación de las velocidades o incluso medirlas a través de acelerómetros.
De esta manera, un microcomputador computa los valores de los torques o el acople entre
los servosistemas. De esta manera, la microcomputadora genera la función Pi*(x) que es, teóricamente, igual al acople. Sin embargo, esta solución también tiene algunos problemas, principalmente el hecho de que el cómputo en línea es bastante complicado puede terminar en un modelo dinámico bastante complejo.
Es importante notar que al moverse rápidamente el motor, los momentos dinámicos
también varían rápidamente. Por esto es necesario un microcomputador lo suficientemente rápido (un período de muestreo muy corto) para no introducir un error significativo a la hora de trabajar con el modelo digitalizado.
Finalmente, luego de tomar en cuenta todos los momentos de inercia, se obtiene el
siguiente modelo:
∑=
−=1
")’,(*j
iiiiji qHqqHP (12)

IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
29
Sin embargo, el cómputo en línea de fuerzas dinámicas sufre de otras desventajas o problemas. Esta forma de control global presupone que todos los parámetros del robot son identificados de manera precisa y que además no varía, lo cual no es cierto para el caso general. En aplicaciones industriales, esta suposición es válida, pues los procesos son en muchos de los casos, conocidos con anterioridad.
2.11.4 Control de robots con ayuda de un computador
En la actualidad, las aplicaciones de computadoras en la síntesis de control a gran escala son muy utilizadas. A continuación se dará una descripción muy breve del paquete de software utilizado para este tipo de aplicaciones, el cual está basado en los métodos de síntesis de control antes mencionados.
El paquete de software permite la síntesis del nivel ejecutivo de control para robots de
estructura arbitraria con numerosas uniones y sus correspondientes actuadores. El usuario del paquete debe determinar los datos para el robot y el paquete le ayuda a
sintetizar el control. Teóricamente el control es interactivo. Esto lo que da es que, en lugar de que el control sea completamente automático, el control interactivo se aplica en lugares donde el computador simplemente ayuda al usuario a seleccionar la ley de control más apropiada para el robot en especial y la labor indicada.
El paquete es modular, lo que significa que consiste de varios módulos los cuales se
mencionan a continuación:
• Módulo para los datos de entrada en el mecanismo de un robot: este módulo permite al usuario definir los datos respecto a la geometría y estructura del mecanismo del robot para el cual se desea controlar.
• Módulo para los datos de entrada del actuador. En este módulo, el usuario debe seleccionar el tipo de actuador que desea aplicar a este robot.
• Módulo para determinar la trayectoria deseada: el usuario especifica la labor que el robot debe realizar.
• Módulo para la síntesis del servosistema local: el paquete puede sintetizar el servosistema usando varios métodos en acuerdo con las opciones del usuario.
• Módulo para la síntesis de control nominal: el paquete permite cómputo automático del torque nominal correspondiente al camino impuesto del brazo del robot.
• Módulo de síntesis del control global: el usuario puede sintetizar el control global usando este paquete.
• Módulo de análisis del comportamiento del robot: analiza la estabilidad del robot con la ley seleccionada.
• Módulo de simulación de la dinámica del robot: el módulo de simulación del robot permite al usuario verificar el correcto comportamiento con diferentes leyes de control.
IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
30
• Módulo de síntesis del control en el dominio de tiempo discreto: permite sintetizar el control en tiempo discreto.
Además, el paquete incluye algunos módulos para otras aplicaciones como presentación
gráfica de estructura y trayectoria, síntesis nominal de control, simulación, etc. Es importante notar que una respuesta estable al modelo lineal es necesaria pero no
suficiente. Por lo tanto, si el modelo lineal produce una simulación estable, es necesario comprobar la estabilidad del modelo no lineal. Si esta simulación es estable, entonces se puede garantizar la estabilidad del sistema.
En cambio, si el sistema lineal no es estable, no es necesario simular el sistema no lineal pues
obviamente éste también será inestable.
2.11.5 Método del torque computarizado para la síntesis de control
El control global utilizando, ya sea realimentación de fuerzas o el cálculo en línea de momentos tiene también la labor de compensar las fuerzas dinámicas actuando en el acople de las uniones entre sistemas. Ambos métodos son una derivación de la estructura descentralizada, ya que el control de señales para los actuadores en particular se calcula a través de la función de variables de estado de todos los subsistemas. Por esta razón, este control posee una estructura centralizada. Sin embargo, el objetivo principal en este acercamiento es restringir, lo más posible, la estructura descentralizada e introducir los lazos de realimentación cruzada global solamente cuando sea necesario.
En este método se aplicará el efecto contrario: comenzando desde el control global del
modelo de sistema, el control se sintetiza con la estructura centralizada y luego se eliminan los lazos no necesarios.
El método del torque computarizado o dinámica inversa es uno de los métodos
centralizados utilizados en la síntesis de control. El principio es incluir un modelo matemático directamente en la ley de control.
Al inicio se tomará por simplicidad, el modelo de P considerado como:
)’,(")( qqhqqhP += (13)
A través de introducir lazos de ganancia K1 y K2 y la derivación del vector q´́ como ∆q´́ se obtiene un modelo de momentos que se muestra a continuación:
[ ] )()(’)(’())()(()(")()( 02
01
0 qgtqtqKtqtqKtqqHtP iiiiiii
iii +−+−+= (14)

IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
31
El principal problema en la implementación del control dinámico es la necesidad de que el modelo completo de la dinámica del robot es calculado en línea (en funcionamiento) que es generalmente muy difícil de obtener, aún empleando un procesador muy rápido. 2.11.6 Control de robot basado en unidades cartesianas
La labor a realizarse por el robot está designada por medio de coordenadas cartesianas. Por tanto, el modelo lógico y muchísimo más simple para el operador es diseñar la trayectoria del robot por medio de coordenadas externas y hacer la conversión a las coordenadas internas del mismo.
Para realizar las coordenadas de unión obtenidas, se utiliza una ley diferente de control.
Este control es conocido como control basado en unión. Claramente, este control requiere la solución del problema cinemático inverso que usualmente reduce a la inversión de la matriz Jacobiana y este procedimiento puede requerir un gran número de cálculos matemáticos.
Es aquí donde el utilizar las coordenadas externas funciona. El procedimiento es
transformar la posición, velocidad y aceleración medidas por los sensores y comparar con las coordenadas externas de manea que los errores se obtienen en términos de las coordenadas externas.
Otra solución al método cartesiano es, basados en el error en las coordenadas de mano,
calcular las fuerzas que producirán que el brazo siga la trayectoria deseada. Además de las ventajas obvias de estos esquemas de control respecto a la reducción del número de operaciones numéricas, el método cartesiano tiene también algunas desventajas. La síntesis de los lazos de ganancia en este esquema es extremadamente complicado. Para lograr que la posición sea satisfactoria, no se puede establecer valores fijos de ganancias sino que estas variarían conforme a la posición del robot.
Debe recordarse que el método cartesiano es un método que aún está en experimentación en los laboratorios, así que en la práctica los robots se manejan exclusivamente por coordenadas de unión.

IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
32
4. 0 Conclusiones La robótica es un campo extenso, y en crecimiento constante en aplicaciones y alcances. Por lo tanto, es necesario delimitar el campo de estudio, en el caso del presente trabajo la delimitación se dio hacia mostrar algunas soluciones básicas para resolver el problema del control del robot. La robótica depende completamente del control automático, pues es el objetivo de los robots actuar de forma automática. En el control cinemático del robot, se estudio como debe hacerse por separado el control de cada una de las partes que integran el robot, como si actuaran en forma aislada. Con las partes se hace referencia inmediata a las uniones, pues es ahí donde se produce el movimiento del robot, característica fundamental del mismo. En este análisis en el cual surgen los primeros problemas al definir la trayectoria que se desea que cada parte recorra. Al tratar de resolver este problema, se observa la primera limitante en la fabricación de un robot, ya que hay una dependencia directa de la controlabilidad del robot con la determinación de las coordenadas para su trayectoria. Para esto está el método analítico y el numérico, ambos modelos válidos pero de diferente complejidad. Para sintetizar la trayectoria de cada uno de las partes del robot también hay varios métodos, también variantes en complejidad dependiendo de las aplicaciones.
Muchos tipos de robot deben poder reaccionar ante cambios en su entorno. Para ello existen los
sensores y actuadores, que actúan en cada una de las uniones del robot. La complejidad de los mecanismos también es direcamente proporcional al costo, y eso es siempre importante en los problemas de ingeniería. Para cada robot, las partes requieren de un diseño específico y un análisis matemático propio. En el presente trabajo se llegó a un modelo centralizado, que es un modelo en variables de estado para actuadores, sensores y otros instrumentos de aplicación en la robótica. Este modelo obtenido no es lineal. En las aplicaciones de control automático conocidas es necesario realizar una linealización de este modelo. Se estudió en el trabajo cómo son los servo sistemas quienes controlan cada una de las uniones del robot, pasando la información a los actuadores, quienes ya realizan propiamente el movimiento en las uniones. Se hizo la diferencia entre control estático y control dinámico, dependiendo de si es necesario predeterminar el camino requerido para llegar de una a otra. Es claro que el control dinámico (predeterminando la trayectoria) es más complejo que el estático.

IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
33
En la síntesis de los servo sistemas es posible usar un procedimiento de ubicación de semejante a los estudiados. La manera en que se presentó en este trabajo fue idealizado pues no se consideraron muchos efectos limitantes del movimiento que se dan en la vida real (fricciones, entre otros). Si se va a diseñar un robot para aplicaciones muy específicas esto no es conveniente idealizarlo de ese modo. Cuando se realiza control dinámico, la trayectoria debe ser controlada en cada punto, y esto es posible hacerlo con un controlador PID, cuyo modelo ha sido estudiado. El control global es muy utilizado como solución al control dinámico, siendo posibles también controles computarizados. Una forma reciente y más sencilla e intuitiva para controlar los movimientos y procesos del robot es el método de coordenadas cartesianas. No fue considerado ampliamente su estudio en el presente trabajo, pero es una propuesta interesante para un estudio posterior por su simplificación y análisis más sencillo.

IE-431 Sistemas de Control Aplicados a la Robótica
Grupo 06 1er Semestre de 2002
34
5. 0 Bibliografía � Vukobratovíc, M.; Dragan S.- “ Applied Control of manipulation Robots: Analysis,
Synthesis and Excercises” , Springer-Verlay Heidenberg, Germany, 1989. � The Desing Enginnering Division.- “ Robotics: Kinematics Dynamics and Controls” ,
1994. � Samson, C.; Le Borgne, M.; Espiau, B.- “ Robot Control, The Task Function
Approach” , Clarendon Press Oxford, 1991. � Kinzel, G.; Reinholtz, C.; otros.- “ Robotics, Spatial Mechanisms, and Mechical
Systems” , The American Society of Mechanicl Enginners, 1992.