sistema de estabilización de cámara para cartografía aérea
TRANSCRIPT

Sistema de estabilización de cámara para cartografía aérea.
Autor: Alejandro Santana GarcíaTutor: Javier del Pino Suarez
Titulación: Ingeniero Técnico de Telecomunicaciones especialidad en Sistemas electrónicos

Índice1. Bloque I
1. Introducción 2. Objetivos3. Diseño propuesto
2. Bloque II1. Selección de sensores y actuadores2. Desarrollo del Hardware3. Diseño de la PCB4. Diseño del Software5. Diseño estructural
3. Bloque III1. Conclusiones2. Líneas Futuras3. Presupuesto
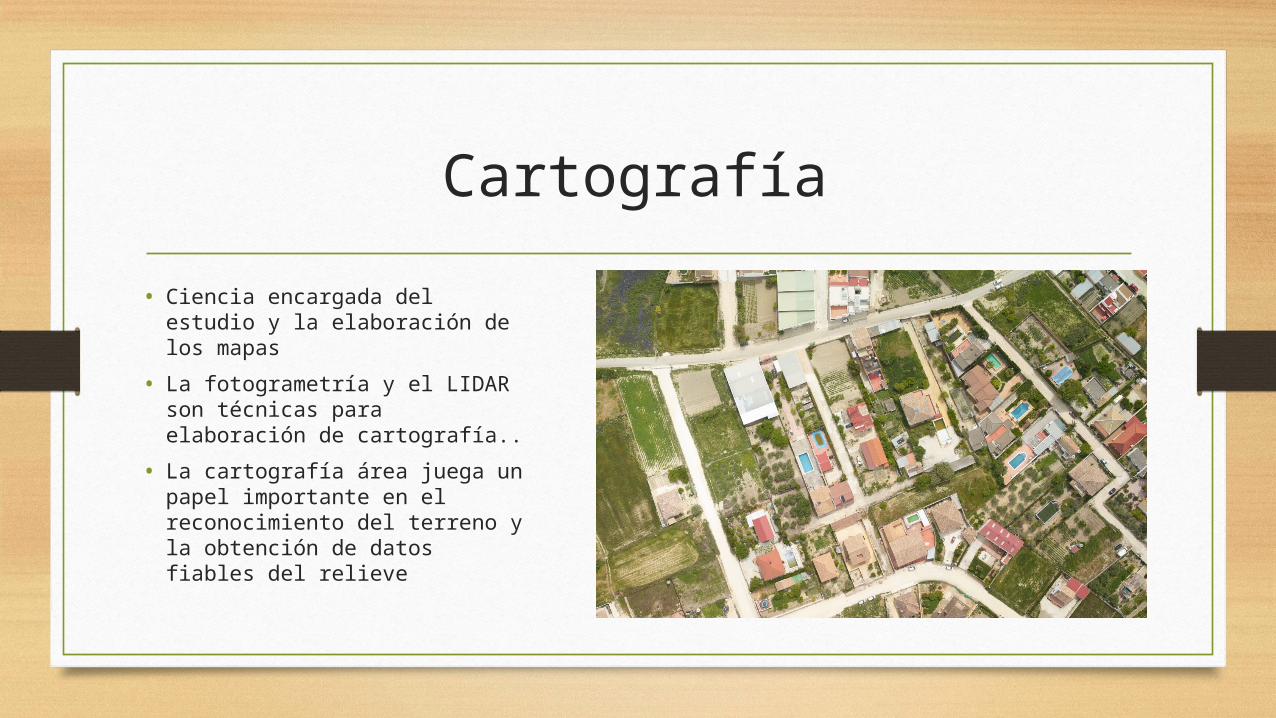
Cartografía
• Ciencia encargada del estudio y la elaboración de los mapas
• La fotogrametría y el LIDAR son técnicas para elaboración de cartografía..
• La cartografía área juega un papel importante en el reconocimiento del terreno y la obtención de datos fiables del relieve

Aplicaciones del LIDAR y cartografía aérea
• Elaboración de mapas• Estudio del terreno• Proyectos de ingeniería• Estudios de geología• Geotécnicos• Vegetación• Inspección de líneas eléctricas• Generación de modelos
digitales del terreno
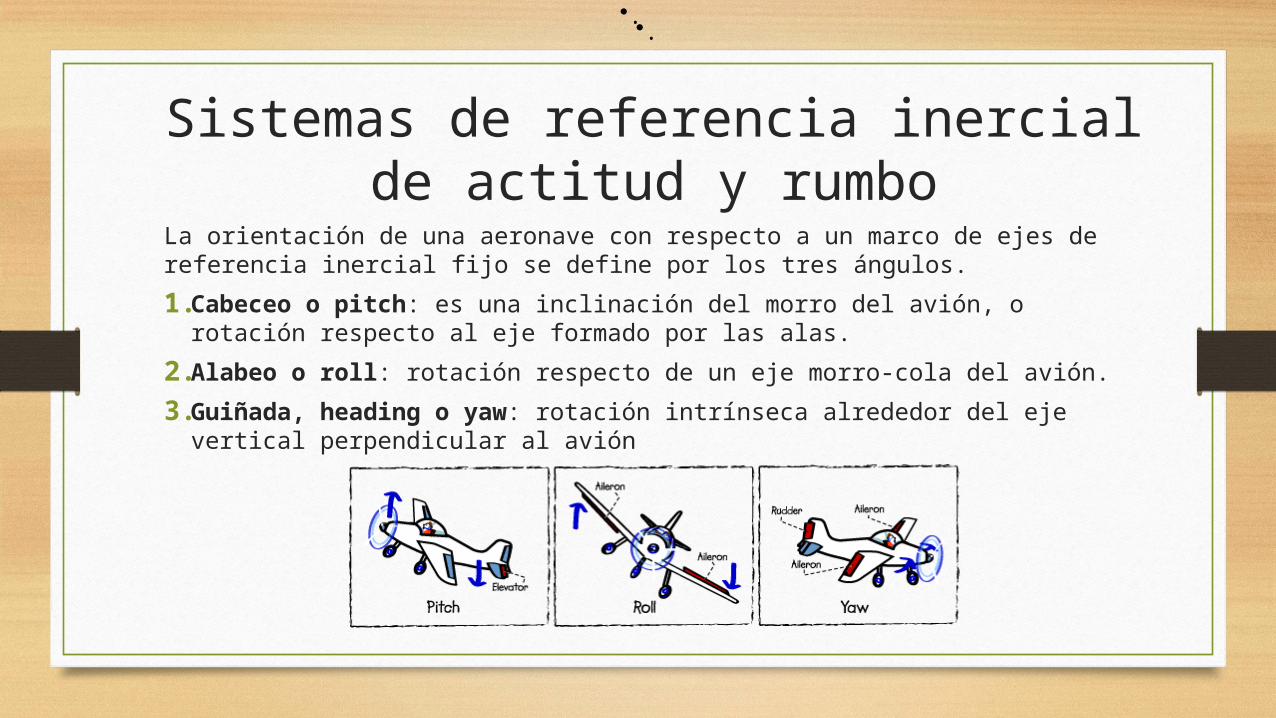
La orientación de una aeronave con respecto a un marco de ejes de referencia inercial fijo se define por los tres ángulos.1.Cabeceo o pitch: es una inclinación del morro del avión, o rotación
respecto al eje formado por las alas.2.Alabeo o roll: rotación respecto de un eje morro-cola del avión.3.Guiñada, heading o yaw: rotación intrínseca alrededor del eje vertical
perpendicular al avión
Sistemas de referencia inercial de actitud y rumbo
•. •.

Obtención de fotogramas en aeronaves
La adquisición de ortofotos y datos LIDAR desde aeronaves es un proceso que requiere de mucha precisión, se puede ver perjudicado por diferentes factores:
• Viento cruzado en la cola de la aeronave.• Aceleraciones y desaceleraciones mientras se esta
obteniendo las ortofotos.• Habilidad del piloto• Estabilidad de la misma aeronave• Montaje del dispositivo de captura, laser y cámara.

Espacios y solapes entre fotogramas
Ortofoto con solape Ortofoto sin solape

Sistema Aerolaser

Índice1. Introducción 2. Objetivos3. Diseño propuesto4. Selección de sensores y actuadores5. Desarrollo del Hardware6. Diseño de la PCB7. Diseño del Software8. Diseño estructural9. Interfaz de comunicación del sistema10.Presupuesto

Objetivos• Movimiento de cámara Phaseone IXa180 y sensor inercial F-SAS1 con
un peso máximo de 5 Kg• Ángulos de corrección del sistema:
• Heading ± 25° • Pitch ± 15° • Roll ± 15°
• Diseño del hardware y software• Diseño de la PCB que aloja la electrónica necesaria• Diseño de la estructura y prototipo funcional

Índice1. Introducción 2. Objetivos3. Diseño propuesto4. Selección de sensores y actuadores5. Desarrollo del Hardware6. Diseño de la PCB7. Diseño del Software8. Diseño estructural9. Interfaz de comunicación del sistema10.Presupuesto

Diagrama de bloques del sistema

Diseño estructural• 3 Actuadores lineales dispuestos a
120°• Soporte del sensor inercial (IMU
FSAS)• Cojinete central “Lazy Susan”• Rotulas y articulaciones• Servomotor para el movimiento en
Heading• Piñón y soporte de motores • Plataformas fija y plataforma movil

Microcontrolador SAM4ECaracterísticas del microcontrolador usadas en el proyecto Sam4e:• Arquitectura ARM Cortex M4 de 32 bits con instrucciones RISC• 1024 Kilobytes de memoria Flash para programa.• 2KB de memoria cache para procesamiento de datos en ejecución.• 128KB de memoria SRAM.• Procesador con unidades de punto flotante (FPU).• Sistema acceso directo a memoria (DMA).• 9 Timmers• 2 UART y 2 módulos de comunicación serie I2C (TWI). • 4 Unidades de PWM para el control de los servomotores del sistema estabilizador. • Reloj en tiempo real (RTC).• USB 2.0

Índice1. Introducción 2. Objetivos3. Diseño propuesto4. Selección de sensores y actuadores5. Desarrollo del Hardware6. Diseño de la PCB7. Diseño del Software8. Diseño estructural9. Interfaz de comunicación del sistema10.Presupuesto

Sensor inercial MPU6050 y sensor magnético HMC5883L
• 3 Giroscopios para cada eje con una resolución ±250, ±500, ±1000, y ±2000 °/sg
• 3 Acelerómetros para cada eje con resoluciones de ±2g, ±4g, ±8g y ±16g.
.
• Detecta las líneas del campo magnético de la tierra de unos 0.25 , 0.60 Gauss
• Es ruidoso en su medida• No tiene compensación de la inclinación, debe
realizarse por software.• No tiene compensación en “Hard Iron” y “Soft
Iron”debe implementarse a través de software

El acelerómetro, el giroscopio y su problemática
El acelerómetro:
• Este tipo de sensores entregan valores con mucho ruido en su medida
• Solo obtenemos valores validos en dos de los 3 ejes de movimiento
• Obtiene valores absolutos
El giroscopio:
• Proporciona valores proporcionales a la velocidad de giro
• Se debe integrar los valores en el tiempo para obtener los ángulos
• Debido a que las medidas son discretas se producen errores de deriva.
• Después de un tiempo funcionando almacena tanta deriva que deja de ser fiable la medida del ángulo.
• Valores relativos

Soluciones combinada• Filtro Kalman
• Muy buena estimación de la actitud de vuelo mediante la combinación de acelerómetro y giroscopio.
• Mayor complejidad matemática• Mayor consumo de recurso computacional.• Es importante que el sistema sea lineal, sino se complica demasiado
• Filtro complementario• Es fácil de implementar y de fiabilidad aceptable • Se añaden errores en sistemas dinámicos cuando la velocidad no es contante.

Filtro complementario
• Angulo = Angulo filtrado• K = Ganancia del filtro debe estar entre 0.02 y 0.10• AnguloGyro = Angulo obtenido del muestreo del Giroscopio• AnguloAcel = Angulo obtenido del muestreo del Acelerómetro.• El giroscopio se muestrea 4 veces mas rápido que el acelerómetro para
reducir la deriva

Resultado de filtro complementario
Filtro compensado K = 0.07 Filtro compensado K = 0.01

Resultados del filtro complementario
Resultados en vuelo de prueba con ganancia K= 0.02

Resultados del sensor magnético
Heading obtenido por la combinación del magnetómetro y giroscopio K =0.03

Resultados obtenidos después de las pruebas de vuelo.
• Filtro de compensación no es eficiente
• El magnetómetro se ve muy afectado con la inclinación
• Los valores de actitud en pitch y roll tienen un error de hasta ±15°

Sensor AH100B• AH100B sensor inercial de la casa Rion• Precisión en heading < 2°, pitch y roll ±0,2°• Proporciona a través de una comunicación serie
RS- 232 datos absolutos de actitud de vuelo.• Realiza hasta 100 medias por segundo• Filtro Kalman implementado• Calibración de “Soft Iron” y “Hard Iron”
disponible• Hay que rotar el sensor físicamente en el lugar
donde se va a instalar a fin de realizar la calibración magnética.

Sensor AH100B• Posee magnetómetro, giroscopio,
acelerómetro en los 3 ejes• Implementa compensación por
temperatura• Alimentación con +5V a través de la
PCB y por medio del conector DB9• Proceso de obtención de los datos a
través de un microcontrolador que fusiona los datos de los sensores.
• Compensaciones y calibraciones previas a través del AHRS Viewer
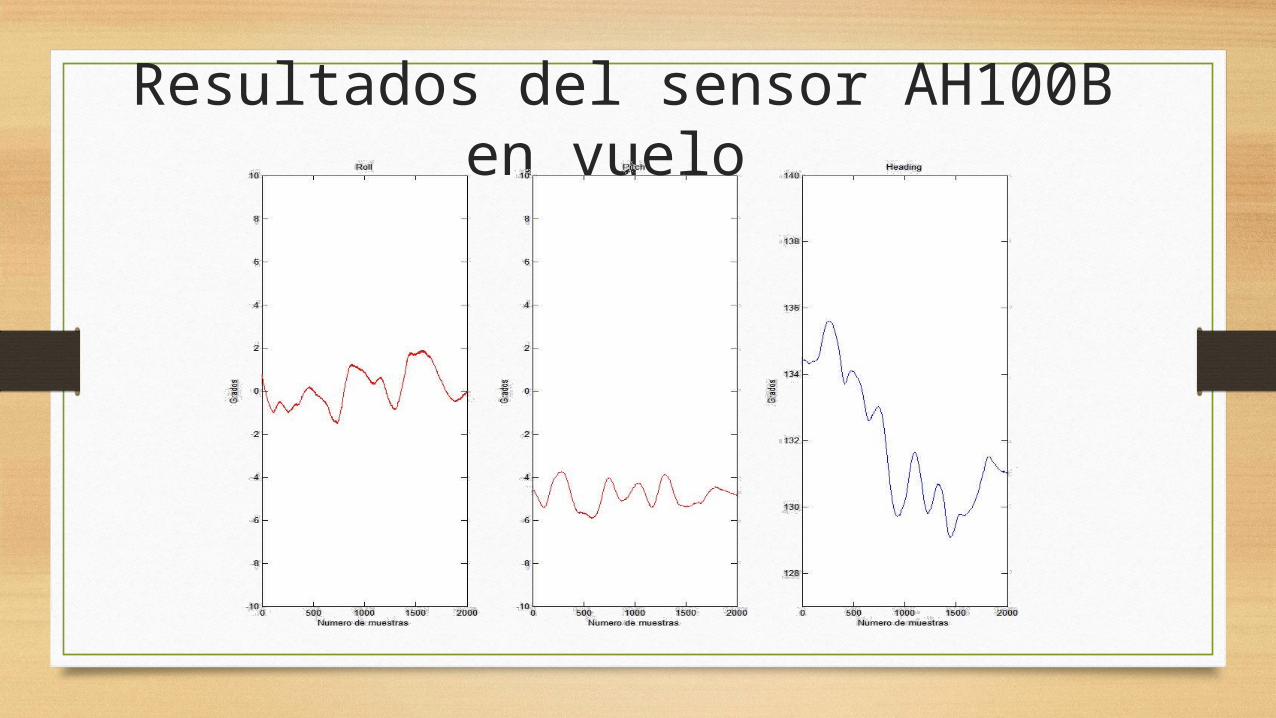
Resultados del sensor AH100B en vuelo

Actuadores lineales Firgelli L-16R
• Actuadores lineales tipo Servos, accionados mediante señal PWM
• Peso Máximo 50 N (5 Kg)• Rango de funcionamiento 4.5 V – 7 • Buena relación entre velocidad y par• Recorrido del eje 50 mm

Servomotor SAVOX SG 2251Item 4.8V 6.0V
Velocidad de operación
0.105 sg / 60º 0.085 sg / 60º
Corriente de operación
120mA 180mA
Par máximo 10Kg-cm 15.0 kg-cm
Corriente máx. Carga
4A 5A
Corriente de operación en
estático5mA 5mA
• Servomotor encargado del movimiento en Heading de la estructura
• Control por medio de señal PWM 0,8 - 2,2 ms y de periodo 50 Hz
• Máximo recorrido 130°
• Rango de alimentación 4.8 V – 7.4 V
• Tipo de motor Brushless ( sin escobillas) que aumenta el rendimiento, aumenta la precisión y la durabilidad.

Características de la etapa de alimentación
• Parte digital y de potencia con masas aisladas mediante supresores.• La alimentación compatible con la tensión de las aeronaves entre12 y 24 voltios• Tensión de salida 3.3V• Alimentaciones independientes para el circuito de potencia y el circuito digital.• Dispone de un filtro EMI para las frecuencias indeseadas. • Presenta protección contra cortocircuitos y aumentos de corriente excesivos.• Regulador de tensión ajustable.• Interruptor y diodo LED.• El diodo Zener de protección para cortocircuitos.

Esquemático de la etapa de Alimentación

Características de la etapa de Potencia
• Etapa encargada de alimentar a los motores • La comunicación entre el microcontrolador y el motor se hace a
través de un circuito optoacoplador 4N25 con el fin de evitar ruidos de las cargas inductivas que puedan afectar al funcionamiento.
• Cada regulador lineal alimenta a un motor y puede proporcionar hasta 3 amperios de corriente de salida.
• La tensión de los reguladores es ajustable en el rango de 1,25 V -25 V
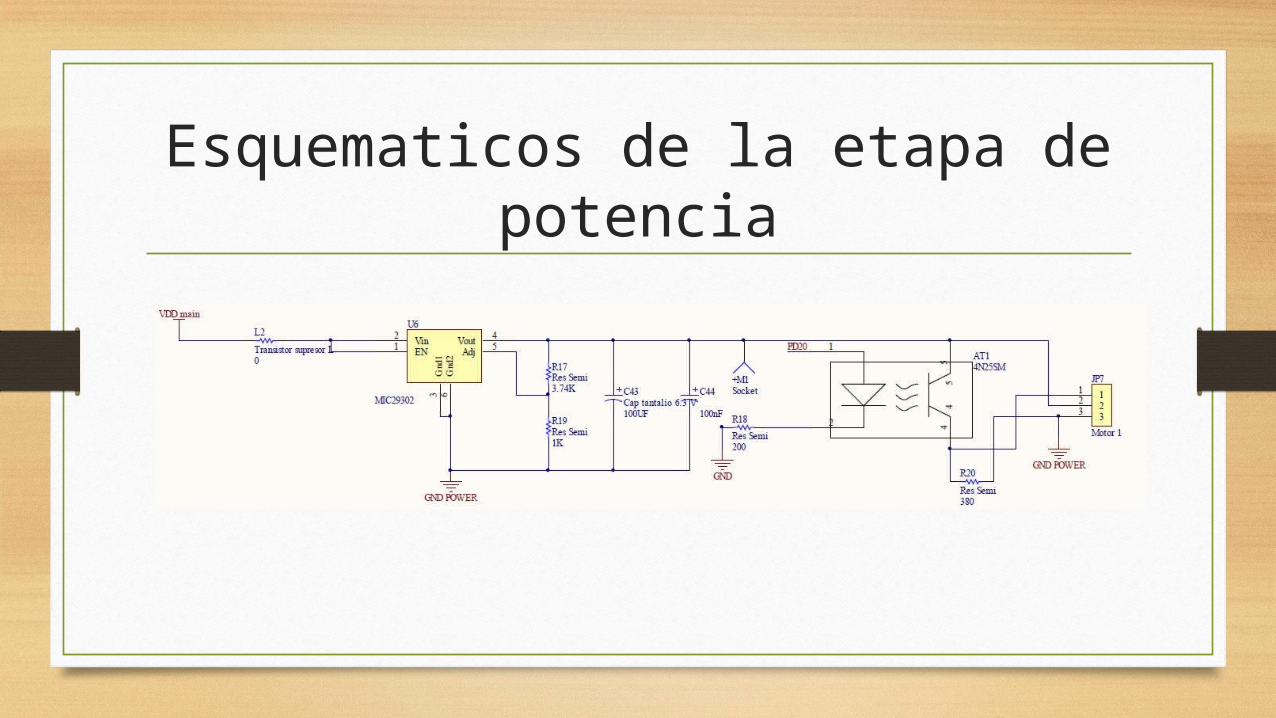
Esquematicos de la etapa de potencia

Características de las comunicaciones RS-232 y micro USB
Puertos series• 2 Puertos DB9 con driver ADM 3202 para la implementación del
protocolo de comunicación RS – 232• Admite velocidades de hasta 230400 kbps• Puntos de test disponibles para comprobar la comunicaciones Puerto micro USB• Conector micro USB 2.0• Supresores de corriente conectados a la masa del conector

Esquemático de las comunicaciones RS-232 y micro USB

Circuito del sensor inercial y magnetómetro
• MPU6050 y HMC5883L ubicado en la PCB• Posibilidad de selección del uso de los sensores embebidos en la PCB o
sensores externos• Se ha diseñado también una PCB de tamaño reducido que aloja los
sensores para ubicar estos externamente en la plataforma móvil• Conexión al micro a través de un bus de conexión para I2C• Conexión del pin INT del sensor mpu6050 para lectura mediante
interrupciones del microcontrolador

Esquematicos del circuito del sensor inercial y magnetómetro

Circuitos externos del microcontrolador
• Circuito que fija la tensión de referencia del ADC• Jumper para el borrado de la memoria Flash mediante Hardware• Jumper para la habilitación del modo Test• Interrupción del micro para debug por medio de un pulsador.• 2 cristales externos de 12 Mhz y 32768Hz para realizar contadores de relojes
digitales de alta precisión • Circuito externo con filtro para PLL• Circuito de LED para la indicación del estado del sistema• Botones para el manejo por hardware del sistema

Circuitería externa de la PCB
Conector JTAG Circuito cristal externo
LED para indicacionesLED para indicacionesPines de expansión
Tension PLL y tensión de micro

Diseño de PCB
• Se ha usado el programa Altium Designer Winter 09 para el diseño de esta PCB
• Dos capas con planos de tensión 3.3 V en el Top layer y planos de GND en el Bottom layer
• Su fabricación se ha llevado a cabo en el fabricante chino PCB cart.
• El tamaño de la PCB es de 110x160mm• Se han calculado los anchos de las pistas de
potencia en relación a la corriente• El tamaño de vía mínimo es 0.3 mm, el ancho
de pista mas pequeño es 0,25 mm

PCB ruteada sin planos (top layer)

Footprint del sensor inercial
• El footprint del MPU6050 ( sensor inercial) ha sido diseñado de manera que el plano de GND tenga varias divisiones para el correcto asentamiento del estaño y que el chip quede lo mas recto posible.

Puntos de test• Se disponen de varios puntos de test a lo largo de la
placa• Puntos de test de alimentación para la tensión:
• Tensión PLL • Tensión del core del microcontrolador• Tensión de entrada del regulador del micro (VDDIN)• Tensión de salida del regulador del micro (VDDOUT)• Tensión de motores• Tensión de alimentación del regulador principal (3.3 V)• Alimentación de los motores (+M1,+M2,+M3,+M4)
• Puntos de test de la comunicación:• Señales recibidas Rx del puerto Com 1 y Com 2• Señales transmitidas Tx por el puerto Com 1 y Com 2
Fabricación de la PCB (top layer)

Fabricación de la PCB (bottom layer)

Montaje de componentes (máscara)

Montaje de componentes
Pick & Place manual para componentes SMD
Pick & Place para componentes QFN y BGA
Horno de soldadura

Programación del Firmware• El software de programación ha sido
el Atmel Studio 6 • Se han usado los ASF disponibles en
Atmel• Se han utilizado bibliotecas para
configurar los siguientes periféricos:• Módulos PWM• Módulo I2C• Configuración de UART’s• Uso de la FPU• Manejo de puertos PIO
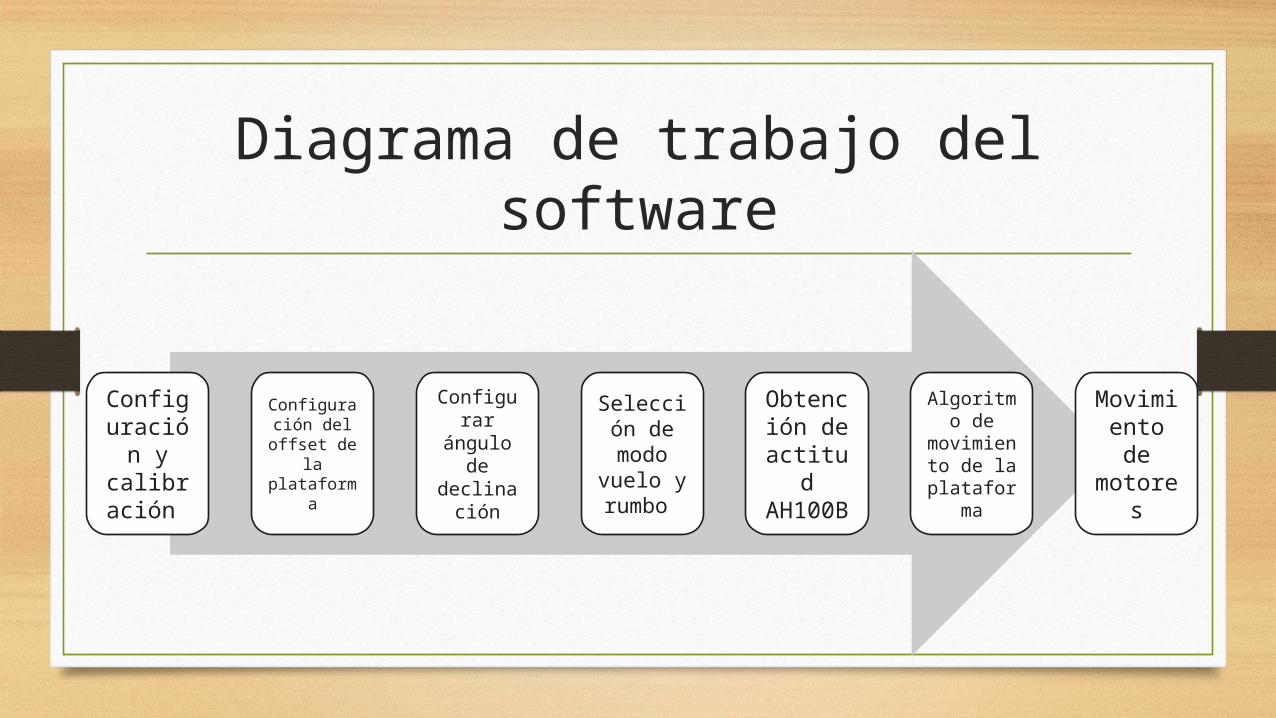
Diagrama de trabajo del software
Configuración
y calibración
Configuración del offset de
la platafor
ma
Configurar
ángulo de
declinación
Selección de modo
vuelo y rumbo
Obtención de actitud AH100
B
Algoritmo de
movimiento de la platafor
ma
Movimiento de motore
s

Diseño estructural
Diseño Gimbal Estructura tripode
• Ahorro de espacio
• Menor sobrecarga de los motores
• Mayor estabilidad
• Mayor complejidad en el control electrónico (matrices de rotación)

Conclusiones • El primer prototipo construido posee las siguientes características:
• Estabilización en vuelo por medio del control por la aplicación• Modo simulación incluido• Control por puerto serie• Alimentación de 5 V – 24V• Consumo de corriente Máximo 2 A• Máximos ángulos :
• Heading ±22• Pitch ±15• Roll ±15

Presupuesto
Concepto Importe (€)
Costes de recursos humanos 66112
Presupuesto material del proyecto 1818,84
Presupuesto del software 5299
TOTAL 73229,84