sistema de control y monitoreo siemens
TRANSCRIPT

a.- Sistema de Control y Monitoreo SIEMENS para motores Caterpillar 3616
El sistema de control y monitoreo (S.C.M.) de la marca SIEMENS), está
basado en la integración de sensores de entrada, controles de salida,
procesadores de adquisición de datos e interfaces gráficas de usuario
(estaciones de trabajos).
Este sistema se encarga de realizar funciones de protección, control,
aceleración y embrague de los motores Caterpillar 3616, está diseñado para
permitir el control del sistema desde posiciones remotas tales como la Consola
Puente de Mando y la Consola del Cuarto de Control en donde sus
componentes se comunican entre sí a través de la red de sistema.
Hay dos tipos de redes típicas en el sistema. La red principal se encuentra
bajo un medio de comunicación llamado Industrial Ethernet. El segundo tipo es
red prófibus, que provee una conexión (bus) en serie para comunicación directa
al nivel de la máquina.
El S.C.M. cuenta con dos computadoras principales que tienen una
conexión directa vía Ethernet con los PLCs de los tableros locales, a los
cuales llamaremos Servidor Local de Babor y Servidor Local de Estribor.
En la figura 1.5 se puede observar el Servidor Local de Estribor y sus
componentes.
Figura 1.5
Servidor local de la máquina de Estribor.
D

1
Indicadores
Revoluciones de la maquina Presión de aire de arranque Horas de servicio de la maquina Revoluciones del eje Voltaje del banco de baterías
3 PC F145.
4 Panel de alarmas PP17.
5 Botón pulsado de paro de emergencia.
6 PLC.
2 Repetidor del telégrafo 7 Gobernador Electrónico Woodward.
Fuente: Departamento B1, ARM. “GUANAJUATO” (PO-153).
Estos servidores adquieren la información de los sensores y actuadores
montados en la máquina para llevar a cabo el control y la vigilancia de los
motores propulsores, esta información es almacenada en una base de datos
interna y es utilizada para el despliegue gráfico local utilizando monitores
Touchscreen.
El sistema cuenta con dos Estaciones de Trabajo las cuales se encuentran
ubicadas en las consolas del Cuarto de Control y Puente de Mando. Estas
estaciones utilizan las bases de datos de los servidores locales para el
despliegue gráfico de ambos motores.
Figura 1.6
Consola del Cuarto de Control.
D
2
6
1
3
4
5
7

).
(A).- Control Lógico Programable (PLC).
El PLC es un autómata programable que utiliza una memoria
programable para el almacenamiento interno de las instrucciones, con el
fin de controlar mediante entradas y salidas digitales y análogas, diversos
tipos de maquinas y procesos.
El PLC SIMATIC S7-300 instalado en el buque proporciona un control y
monitoreo completo para el motor Caterpillar 3616, cuenta con una
arquitectura modular y contiene los siguientes componentes:
(1).- Fuente de alimentación de 24VDC
(2).- Unidad Central de Proceso (CPU 315).
(3).- Chasis o Rack de Expansión.
(4).- Módulos de entrada.
(5).- Módulos de salida.
En la figura 1.7 se puede observar el PLC S7-300 instalado en el panel
de control local de B1.
Figura 1.7
Control lógico Programable
D
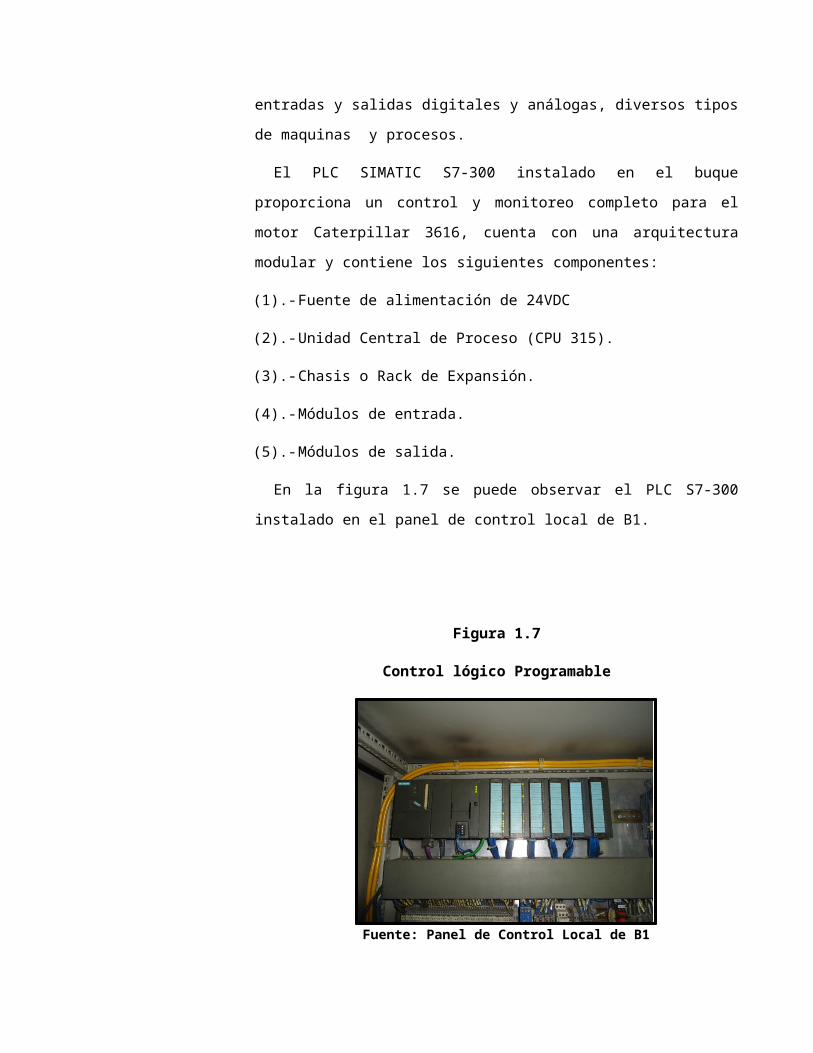
Fuente: Panel de Control Local de B1
Para efectuar sus funciones de control y monitoreo, el PLC recibe las
señales de entrada provenientes de los sensores instalados en los
motores como son: Termocoples, RTDs, Detectores y pickups
magnéticos.
(1).- Termocoples
Un termocople es un sensor de temperatura que consiste en la
unión de 2 metales diferentes y actúa bajo el principio de
operación “Seebeck”: “Si se sueldan dos metales diferentes, cuyo
extremo se encuentran a distintas temperaturas, aparecerá una
FEM”. Es decir, cuando la unión de estos metales se calienta se
genera un pequeño voltaje en cada extremo, esta diferencia del
voltaje entre los extremos es enviada a través de un cable al PLC,
el PLC recibe la señal en su modulo analógico de entrada, el cual
convierte el voltaje en el parámetro que el PLC requiere. El modulo
manda el parámetro al procesador y es usada dentro de la lógica
de programación que tiene el PLC y luego enviada por medio de la
red Ethernet a las pantallas de los tableros locales y consolas
remotas para su visualización.
Figura 1.8
Termocople
D
Fuente: Motor Principal de Babor.
Los motores Caterpillar utilizan termocoples tipo K. El tipo K
tiene rangos de -200 °C (-328 °F) hasta 1260 °C (2300 °F). Este
rango de temperatura corresponde a un rango de voltaje negativo
de 5.9 mV hasta 51.0 mV.
(a).- Ventajas
- Cubren amplios rangos de temperatura (-200 a
1260°C)
- Económicas y muy robustas con respecto a las RTDs.
(b).- Desventajas
- No tienen una alta precisión (+/- 0.5ºC).
(2).- Resistencias detectoras de temperatura (RTDs)
Una RTD mide el cambio de su resistencia eléctrica en función
de la temperatura. Cuando la temperatura incrementa, su
resistencia también incrementa, cuando la temperatura disminuye,
la resistencia disminuye. La resistencia de un RTD varía
linealmente con la temperatura.
La señal obtenida por el RTD viaja a través de los cables hacia
el modulo analógico de entrada configurado para RTDs del PLC,
el modulo RTDs en un parámetro que el PLC requiera. El modulo
D

manda el parámetro al procesador y es usada dentro de la lógica
de programación que tiene el PLC y luego enviada por medio de la
red Ethernet a las pantallas de los tableros locales y consolas
remotas para su visualización.
Los motores Caterpillar utilizan RTDs llamados PT100, los
cuales están construidos de platino y tienen una resistencia de 100
Ohm a 0 °C (32 °F). Normalmente las PT100 vienen
encapsuladas en la misma forma que las termocuplas, es decir
dentro de un tubo de acero inoxidable u otro material (vaina).
(a).- Ventajas
- Alta precisión, de hasta +/- 0.1ºC.
- Ideal para bajas temperaturas.
(b).- Desventajas
- Trabajan en un rango de temperatura limitado (Max.
700ºC).
- Mayor costo que los termopares o termocoples.
Figura 1.9
PT 100.
Fuente: Motor Principal de Babor
(3).- Detectores de Presión (Presostatos)
Los presostatos son un mecanismo que abren o cierran unos
contactos que poseen, en función de la presión que se detecta.
D

Esta presión puede ser provocada por aire, aceite o agua,
dependiendo del tipo de presostatos.
Figura 1.10
Presostatos
Fuente: Motor Principal de Babor
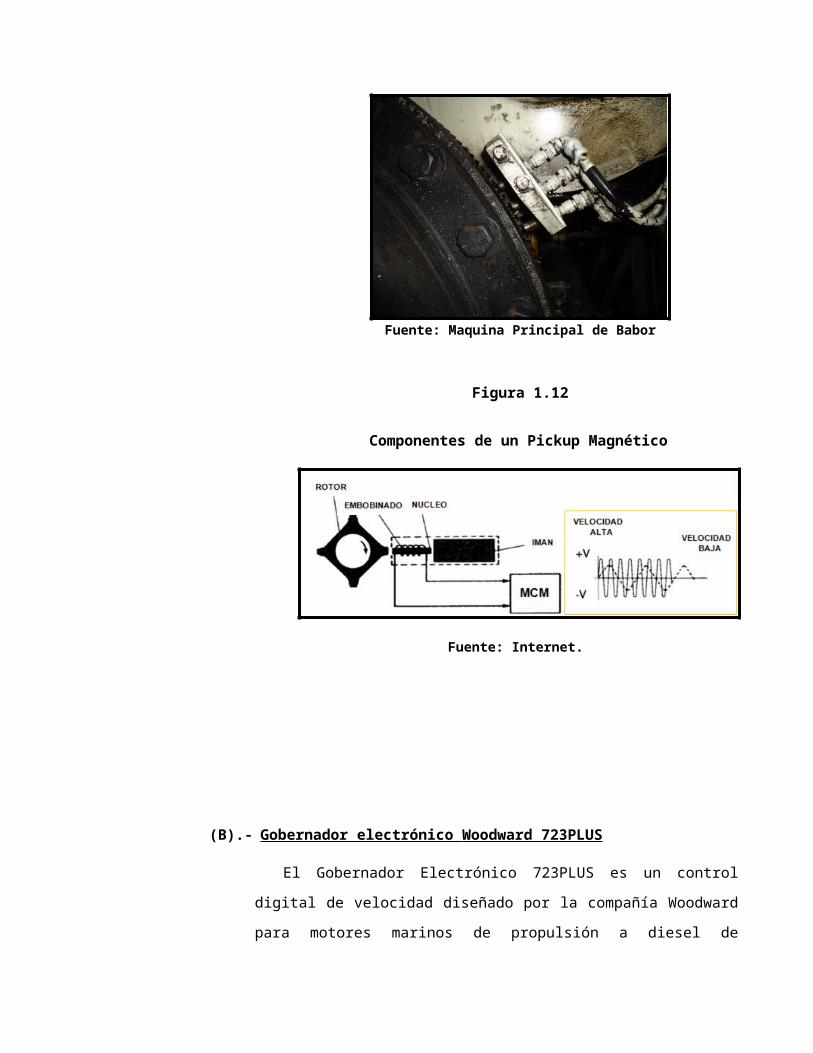
(4).- Pickups Magnéticos
Los pickups magnéticos son sensores compuestos por una bobina
enrollada sobre un núcleo ferromagnético, los cuales están
montados en las proximidades del volante del motor.
Con el motor en funcionamiento, cada diente del volante al pasar
próximo al núcleo ferromagnético, produce que se induzca un
impulso de corriente alterna en la bobina, cuya amplitud varía en
función de la velocidad a la que se introducen los dientes del
volante en el campo de material ferromagnético.
Este impulso es enviado al modulo de electrónico de control de
velocidad, en donde es comparado con una señal de referencia de
impulsos por segundo (frecuencia), para determinar su velocidad.
D
Figure 1.11
Sensor Pickup Magnético
Fuente: Maquina Principal de Babor
Figura 1.12
Componentes de un Pickup Magnético
Fuente: Internet.
(B).- Gobernador electrónico Woodward 723PLUS
El Gobernador Electrónico 723PLUS es un control digital de velocidad
diseñado por la compañía Woodward para motores marinos de propulsión
a diesel de Caterpillar. Interactúa con el PLC SimaticS7-300, del cual
D

recibe una referencia de velocidad que es la indicación de la posición de
las palancas del sistema de mando por señales de telégrafo tanto de la
Consola del Cuarto de Control como de la Consola del Puente de Mando.
Esta señal es entregada al 723Plus por medio de una salida
analógica del PLC de 4-20 mA, dicha señal es procesada por el 723Plus
junto con otras señales digitales y analógicas de entrada que son
referencia de velocidad, presiones y temperaturas del estado del motor; el
gobernador electrónico procesa todas estas entradas para regular la
entrada de combustible al motor la cual está dada por una salida de
control en 24VCD con una variación de 0-200mA hacia el actuador de
entrada del suministro de combustible en el motor mismo.
En la figura 1.13 se puede observar gobernador electrónico de
velocidad.
Figura 1.13
Control Digital de Velocidad 723 PLUS.
Fuente: Departamento B1, ARM. “GUANAJUATO” (PO-153).
(C).- Panel de alarmas PP17.
El Panel de Alarmas PP 17 es un indicador de estados de servicio o
alarmas del motor, controla el proceso de arranque y paro del motor por
medio de sus botones, selectores. Se encuentra ubicado en la parte
D
frontal del tablero local así como en las consolas del cuarto de control y
puente de mando, su función es representar de manera visual el estado
de las alarmas básicas de cada motor.
En la figura 1
Cada lámpara puede iluminarse de tres colores diferentes (Amarillo,
Verde y Rojo), y cada color representa una alarma según sea el caso.
Con el color rojo representamos los disparos del motor, con el color Verde
las alarmas de presiones y con el color Amarillo las alarmas de
temperatura. Cada lámpara tiene integrado un botón con el cual podemos
reconocer una alarma.
Cuando cualquiera de estas alarmas es activada por una condición
fuera de sus límites, esta comenzara a parpadear según sea su color,
para reconocer que estamos enterados de la situación el operador tiene
que presionar el botón parpadeante, con lo que le diremos al sistema que
estamos enterados. La lámpara de la alarma no se apagara, si no hasta
que la condición regrese a su estado normal.
D