secysup educacio n tecnologicaii secuencia1
TRANSCRIPT

FEBRERO 2014
1
Educación Tecnológica y TIC II
Secuencia 1. De los sistemas automáticos a la robótica
Curso: Educación Tecnológica segundo / tercer año1
Asignatura: Tecnología
Propósitos
Ofrecer experiencias de aprendizaje para que los estudiantes reconozcan los modos en que se
programan las acciones en los sistemas de control.
Propiciar la construcción de conceptos generales que permitan la generalización del
conocimiento sobre sistemas de control y robótica a partir de la resolución de situaciones
problemáticas utilizando simuladores y otros recursos TIC.
Facilitar espacios de reflexión sobre los cambios producidos en la compleja trama de relaciones
sociotécnicas en la que los sistemas de control y la robótica se insertan.
Objetivos
Que los alumnos:
Reconozcan las diferencias entre acciones de ejecución y acciones de control.
Comprendan que las acciones de ejecución se delegan en los sistemas automáticos.
Reconozcan los distintos componentes de los sistemas automáticos por programa fijo.
Identifiquen la función de los programas como el conjunto de instrucciones almacenadas en un
dispositivo.
Analicen las diferencias entre los sistemas automáticos en los que las instrucciones se
encuentran almacenadas en un programa y aquellos sistemas en los que las acciones se realizan
sin la intervención de un programa almacenado en el programador.
Contenidos
Procesos tecnológicos. Sistemas de control por programa fijo y por sensores. Lógicas de programación
de sistemas automáticos: ciclos, secuencias repetitivas, estructuras condicionales. Medios Técnicos.
1 Segundo año para las jurisdicciones en las que el Nivel Secundario es de 5 años y tercer año para aquellas en las que es de 6 años.

Especialización docente de nivel superior en educación y TIC. Ministerio de Educación de la Nación
2
Secuencias de operaciones delegadas en los robots en los procesos industriales. Formas de
programación textual.
El lugar de los sistemas de control y la automatización en la configuración del sistema sociotécnico
vigente. Cambios producidos en la vida cotidiana y en el ámbito productivo por la incorporación de
sistemas automáticos y robots.
Saberes previos necesarios
En relación con la disciplina:
- caracterización de automatismos;
- formas de delegación de funciones de control en los artefactos;
- componentes de los sistemas de control.
En relación con las TIC:
- descarga e instalación de aplicaciones;
- la función de los programas de simulación.
Actividad 1
Apertura
Tiempo previsto: 40 minutos
El docente comienza la actividad con una presentación del tema, luego proyecta un video de YouTube en el que se muestra la acción de pelar papas. Solicita a los estudiantes que establezcan las diferencias entre pelar papas de esta manera y hacerlo con un cuchillo. Algunas consignas posibles son:
- ¿Por qué es más eficiente pelar papas con este dispositivo que hacerlo con un cuchillo?
- ¿Dónde radican las diferencias entre el uso del cuchillo y el pela papas?
- Diferencien las acciones según sean de ejecución o control.
Estas preguntas intentan promover la recuperación de saberes previos relacionados con reconocer que en todas las actividades técnicas se pueden identificar dos tipos de acciones, las de ejecución y las de control, y que la herramienta pela papas tiene incorporado un dispositivo que “controla” el corte. Posteriormente se analiza el funcionamiento de una plancha y se reconocen las diferencias entre las funciones de ejecución y control en el artefacto. Con estos ejemplos, se busca que los estudiantes reconozcan los dos tipos de acciones a las que se hace referencia e identifiquen que en los sistemas automáticos se delegan las acciones de control. Desarrollo
Tiempo previsto: 80 minutos
El docente presenta una serie de infografías y videos sobre el funcionamiento de distintos tipos de sistemas automáticos.
- Sistemas de seguridad:
http://www.consumer.es/web/es/vivienda/comunidades_vecinos_y_legislacion/2005/04/
11/141087.php
- Sistema de control de velocidad de tránsito:

Especialización docente de nivel superior en educación y TIC. Ministerio de Educación de la Nación
3
http://mas.laopinioncoruna.es/graficos/352/nuevo-sistema-de-control-de-velocidad-en-
tramos.html
- Horno de microondas: http://www.consumer.es/web/es/economia_domestica/servicios-y-
hogar/2004/10/04/140166.php
- Lavarropas automático: http://www.youtube.com/watch?v=DZOkENm1On
- Domótica: http://www.consumer.es/web/es/economia_domestica/servicios-y-
hogar/2005/01/17/140183.php
Los estudiantes, organizados en grupos, analizan los ejemplos presentados; luego se abre el intercambio entre los diferentes grupos y el docente propone clasificar los sistemas en virtud de la similitud entre las funciones desarrolladas en cada uno de los casos observados. Luego solicita que expliciten los criterios que utilizaron en sus respuestas. La intención de este intercambio es caracterizar y clasificar los diferentes tipos de sistemas automáticos identificando al menos tres tipos:
a. los sistemas automáticos en los que se dispone de un programa fijo, también conocidos como
“por tiempo”;
b. los sistemas en los que la regulación se obtiene por la presencia de sensores que aportan la
información al sistema; y
c. los sistemas en los que se combinan los dos anteriores.
Cierre
Tiempo previsto: 20 minutos
Se establece un diálogo y toma de notas sobre las características de los distintos sistemas automáticos y se plantea que la intención de esta unidad estará centrada en comprender las características de los sistemas de control y el modo en que se programan las acciones en los dispositivos que reemplazan al hombre en la toma de decisiones. Se presenta el programa RoboMind, un simulador realizado por la Universidad de Ámsterdam, y se explica el modo de descarga e instalación. Evaluación
El docente explicita los criterios que se pondrán en juego en la evaluación de la secuencia. Comparte con los estudiantes la tabla con los criterios y formas de valoración que utilizará (ver rúbrica en Anexo). Recursos
Herramientas disponibles:
- programa RoboMind: http://www.robomind.net/es/
Videos: - Pelador de papas o verduras: http://www.youtube.com/watch?v=RGA-
d3ChqLs&feature=player_detailpage
Infografías: - Sistemas de seguridad:
http://www.consumer.es/web/es/vivienda/comunidades_vecinos_y_legislacion/2005/04/
11/141087.php

Especialización docente de nivel superior en educación y TIC. Ministerio de Educación de la Nación
4
- Sistema de control de velocidad de tránsito:
http://mas.laopinioncoruna.es/graficos/352/nuevo-sistema-de-control-de-velocidad-en-
tramos.html
Horno de microondas: http://www.consumer.es/web/es/economia_domestica/servicios-y-
hogar/2004/10/04/140166.php
- Lavarropas automático: http://www.youtube.com/watch?v=DZOkENm1On
- Domótica: http://www.consumer.es/web/es/economia_domestica/servicios-y-
hogar/2005/01/17/140183.php
Actividad 2 Apertura
Tiempo previsto: 10 minutos Esta clase se inicia con un diálogo sobre los aspectos observados al instalar el software de simulación y se evacuan las inquietudes de los estudiantes sobre su instalación. Se describen las partes que componen el programa y se identifican elementos de la pantalla y las ventanas. Desarrollo
Tiempo previsto: 80 minutos 1) Exploración del programa Se describen las instrucciones básicas o comandos más utilizados del programa como así también las funciones de los sensores y actuadores disponibles.
Captura de pantalla de RoboMind
Se propone una secuencia de situaciones problemáticas a fin de que los estudiantes exploren el funcionamiento del programa. Las actividades comienzan con una exploración libre en la que los estudiantes se familiarizan con el programa ensayando distintas formas de comandar el robot. Seguidamente se les pide que muevan el robot utilizando la herramienta de control remoto disponible en la ventana Correr. El docente promueve la observación sobre el sector izquierdo de la pantalla, donde se van registrando las distintas instrucciones que va ejecutando el robot. De este modo se pone la atención sobre la relación existente entre las instrucciones del programa y la actuación del robot.
Especialización docente de nivel superior en educación y TIC. Ministerio de Educación de la Nación
5
Luego se presenta un video en el que se observa al robot que ejecuta un programa con instrucciones sencillas. Los estudiantes deben reconocer las instrucciones básicas (adelante, atrás, derecha, izquierda, etcétera). 2) Instruyendo al robot A partir de lo observado, cada uno de los estudiantes crea en su netbook un programa para que el robot pinte las iniciales de su nombre; al finalizar deben guardar el programa. En la siguiente situación se propone modificar el programa para que el robot busque la baliza, la tome y la coloque al final de la última letra escrita. El docente puede proponer otras situaciones para resolver utilizando este tipo de instrucciones fijas (adelante, atrás, derecha, izquierda, poner, tomar, pintarNegro, pintarBlanco, detenerPintar, entre otras). Cierre
Tiempo previsto: 40 minutos
1) Llegados a este punto del desarrollo, es necesaria una instancia de reflexión que permita conceptualizar y generalizar los contenidos abordados en las actividades. En este sentido, el docente propone una recorrida por los diferentes programas elaborados por los estudiantes; a partir del análisis de los diferentes ejemplos, promueve el desarrollo de conclusiones respecto a las características del tipo de control por programa fijo, también denominado “lazo abierto”. El docente busca generar relaciones entre los contenidos trabajados en clase con ejemplos de este tipo de control utilizado en diferentes artefactos del entorno cotidiano. Propone a los estudiantes la búsqueda de ejemplos de artefactos de uso cotidiano que cuenten con este tipo de control en su estructura. 2) Los estudiantes crean un documento de texto colaborativo en el que vuelcan las conclusiones surgidas del diálogo establecido en la clase y representan con un diagrama de bloques (utilizando las herramientas de dibujo en los documentos de texto de Google Drive) el análisis del funcionamiento de uno de los sistemas descriptos en la Actividad 1 que responda a la clasificación de sistema de control por programa fijo. Evaluación
El docente acompaña cada una de las propuestas, responde dudas, hace preguntas y sugerencias.
Recursos
Herramientas disponibles:
- RoboMind: http://www.robomind.net/es
- Google Drive.
Tutoriales: - Tutorial RoboMind: http://www.youtube.com/watch?v=nCDDmCbYov8
Otros: - Video de robot que ejecuta un programa:
https://www.dropbox.com/s/xdgxb9cqb44azub/robomind2.wmv
Actividad 3 Apertura
Tiempo previsto: 15 minutos

Especialización docente de nivel superior en educación y TIC. Ministerio de Educación de la Nación
6
El docente presenta la actividad poniendo de manifiesto las analogías entre los distintos sistemas de control analizados en las clases anteriores y plantea el siguiente interrogante: ¿qué similitudes o diferencias encuentran entre sistemas como el del semáforo, el lavarropas automático o el microondas y el programa que elaboraron para el robot? Se abre un espacio para el intercambio. Desarrollo
Tiempo previsto: 80 minutos 1) El semáforo El docente centra la atención en el análisis del funcionamiento del semáforo, la intención es que los estudiantes reconozcan la necesidad de determinar el tiempo de duración de cada operación. El docente muestra un ejemplo de diagrama de tiempo que representa el funcionamiento del semáforo y orienta el debate con el propósito de que los estudiantes identifiquen:
- la presencia de un programa que contiene las instrucciones; y
- que las instrucciones incluyen una variable que, en el caso del semáforo o el lavarropas, está
dada por el tiempo, y que, en el caso del robot, está dada por la cantidad de casilleros que se
indican entre paréntesis en la instrucción; por ejemplo, “adelante (4)”, donde la variable (4)
cumple funciones similares a los segundos que se observan en la imagen.
El diagrama de tiempos muestra la relación temporal del encendido de cada luz del semáforo. 2) Investigación: historia de los sistemas automáticos El docente presenta un tráiler de la película La invención de Hugo Abre el diálogo con el propósito establecer analogías entre lo observado en el film y lo desarrollado en las clases anteriores; luego hace las siguientes preguntas:
- ¿Qué relaciones pueden establecer entre este robot y el que ustedes programaron en
RoboMind?
- ¿Cómo se habrán programado las acciones que el autómata debía realizar?
- ¿Cómo se almacenaba el programa en esos dispositivos?
- ¿Cómo se indicaban las variables en esos dispositivos?
- ¿Qué similitudes encuentran entre estos artefactos antiguos y los actuales?
El docente propone indagar, en diferentes sitios web, sobre el funcionamiento de los primeros automatismos, recorre el aula orientando a los alumnos en sus procesos de búsqueda y selección de fuentes online que aborden temas relacionados con: “autómatas mecánicos”, las primeras cajas musicales, el mecanismo de los primeros semáforos automáticos, entre otros. Las consignas para resolver son:
- Los estudiantes vuelcan sus indagaciones en un informe grupal que incluya textos, imágenes
y links a los sitios visitados utilizando el documento creado en la Actividad 2.
- En forma grupal elaboran una línea de tiempo multimedia, utilizando la aplicación Dipity,
que describa la historia de los sistemas automáticos por programa fijo, sus aplicaciones y el
contexto social en el que se desarrollaron. En el trabajo deberán incluir textos, imágenes y
videos.
El docente pone a disposición de los estudiantes un tutorial de Dipity. Cierre
Tiempo previsto: 40 minutos

Especialización docente de nivel superior en educación y TIC. Ministerio de Educación de la Nación
7
El docente crea un aula en Edmodo2 donde los estudiantes subirán sus producciones y participarán comentando los trabajos de sus compañeros. Pone a disposición de los estudiantes un tutorial de Edmodo. Cada grupo realiza ajustes a partir de las sugerencias de los demás alumnos. El docente pide que los grupos presenten en clase sus trabajos y orienta el análisis para comprender el modo en que, a lo largo del tiempo, han cambiado las tecnologías utilizadas para almacenar los programas de acción en los dispositivos de control. Se pone la atención en las similitudes o continuidades presentes en las diferentes tecnologías utilizadas para cumplir la misma función. Evaluación
El docente establece como criterios de evaluación:
- el reconocimiento de analogías entre las diferentes tecnologías de control utilizadas a lo
largo del tiempo;
- la correcta y completa caracterización de los sistemas de control por programa fijo;
- los atributos estéticos y comunicativos de la línea de tiempo.
A partir de estos criterios, los grupos evaluarán el trabajo de sus pares y realizarán los comentarios en la red social.
Recursos
Herramientas disponibles:
- RoboMind;
- Edmodo;
- Dipity;
- Google Drive.
Videos e imágenes: - Tráiler de la película La invención de Hugo: http://www.youtube.com/watch?v=UqlNG_flu2c
- Diagrama de tiempos: http://1.bp.blogspot.com/-
7G9sZsROP5o/UElolLbdSPI/AAAAAAAAADw/DN5_Mbx238k/s1600/diagrama%2Btempor
al%2Bsemaforo.png
Sitios sugeridos para la indagación: - La belleza mecánica de los primeros autómatas: http://axxon.com.ar/noticias/2013/05/la-
belleza-mecanica-de-los-primeros-automatas
- El mundo fantástico de los autómatas: http://www.youtube.com/watch?v=9URXsens-XM
- Blog Alma de herrero: http://almadeherrero.blogspot.com.ar/2012/04/proyectar-
automatas-mecanicos.html
Tutoriales: - RoboMind: http://www.youtube.com/watch?v=nCDDmCbYov8
- Edmodo: http://www.youtube.com/watch?v=sdKiYzSWCT4,
http://www.youtube.com/watch?v=PLU1vTU_DjA
- Dipity: http://www.slideshare.net/AnaBasterra/tutorial-dipity-para-hacer-una-lnea-del-
tiempo-6686288
2 Una variante puede ser un grupo cerrado en Facebook.

Especialización docente de nivel superior en educación y TIC. Ministerio de Educación de la Nación
8
Bibliografía: - Escuelas ORT Argentina, área Educación Tecnológica, secuencia didáctica. Estación Robot:
http://campus.almagro.ort.edu.ar/educaciontecnologica/tercero/biblio/servicio/treeview/
256828/#top
Actividad 3 Tiempo previsto: 20 minutos
Apertura
El docente hace referencia a los distintos casos presentados en las producciones de los grupos y plantea algunas situaciones en las que ese tipo de sistemas no puede dar respuesta a ciertos problemas de control. Toma el caso de la heladera, o la alarma domiciliaria, y problematiza la situación con algunos interrogantes:
- ¿Qué características tendrán los programas de este tipo de sistemas de control?
- ¿Cómo deberían ser las instrucciones?
- ¿De qué modo el sistema obtiene información del medio ya sea para reconocer rangos de
temperatura o detectar la apertura de una ventana?
Desarrollo
Tiempo previsto: 120 minutos
1) Tipos de control Para profundizar en el reconocimiento de otros tipos de control, el docente propone a los estudiantes nuevas actividades con el programa RoboMind. Para comenzar, les indica que ejecuten el archivo “mazeRunner.irobo”, que es uno de los ejemplos que trae el programa.
Especialización docente de nivel superior en educación y TIC. Ministerio de Educación de la Nación
9
La actividad consiste en analizar el tipo de instrucciones que ejecuta el robot; para ello, el docente plantea algunas preguntas orientadoras:
- ¿Qué características tienen las instrucciones que ejecuta el robot?
- ¿Qué diferencias observan entre este tipo de instrucciones y las que fueron desarrolladas en
las actividades anteriores?
- ¿Cuántas partes componen la instrucción?
- ¿Qué tipo de acciones realiza el robot?
Durante la actividad, los estudiantes deben descubrir la estructura de las instrucciones condicionales; con sus observaciones, el docente facilita que los estudiantes reconozcan que el robot debe obtener información del medio para ejecutar el programa. 2) Tomando información para decidir Una vez identificados estos aspectos, el docente les acerca una guía con preguntas tales como:
- ¿Qué funciones nuevas encontraron en este programa?
- ¿Qué aspectos comunes encuentran con los programas desarrollados por ustedes en las
actividades previas?
- ¿Qué nuevos dispositivos o partes deben formar parte del robot?
El docente propone el intercambio de opiniones a partir de la reflexión sobre la experiencia realizada. La intención de esta actividad es reconocer la necesidad de obtener información del medio para realimentar al programa; en este caso, es necesaria la presencia de sensores que aporten esa información. 3) Instruyendo al robot Para continuar, se pide a los estudiantes que desarrollen un programa en el que el robot deba modificar su trayectoria ante la presencia de un obstáculo.
Cierre
1) Sistemas de control con sensores El docente señala los aspectos novedosos incluidos en la última actividad e identifica las características de las instrucciones condicionales; estas requieren información proveniente de sensores y dan lugar al tipo de control con sensores, también conocido como de “lazo cerrado”. Relaciona esta actividad con los ejemplos de la heladera o la alarma citados en la apertura y propone que establezcan analogías entre estos casos y las actividades desarrolladas con el robot. Luego pregunta: ¿cuáles serían las instrucciones condicionales que debe contener el programa de la alarma para detectar la apertura de la ventana o diferenciar entre la presencia de una persona y un insecto? Los estudiantes retoman el trabajo en el documento de texto, en el que vuelcan las conclusiones surgidas del diálogo establecido en la clase y representan con un diagrama de bloques el análisis del funcionamiento del artefacto elegido (heladera o alarma) utilizando las herramientas de dibujo en el documento de texto de Google Drive. 2) Caracterizando los programas de acción en los sistemas de control
Especialización docente de nivel superior en educación y TIC. Ministerio de Educación de la Nación
10
El docente recupera los ejemplos utilizados en la actividad inicial y solicita que busquen similitudes entre esos ejemplos y las actividades realizadas en RoboMind. Propone a los estudiantes clasificar los distintos tipos de control en el documento de texto. Seguidamente, plantea el diálogo en torno a las diferencias existentes en las instrucciones de los programas que corresponderían a uno u otro tipo de control. 3) Automatización, producción y trabajo El docente le propone a cada grupo la lectura de un artículo periodístico en el que se reflejan los cambios producidos por la incorporación de sistemas automáticos en los procesos tecnológicos. Propone algunos interrogantes que orientan la actividad:
- ¿En qué aspectos se modifican las tareas de las personas cuando se incorporan estos
dispositivos?
- ¿Cuáles son los motivos por los que se introducen estos dispositivos en la producción o en la
actividad señalada en artículo?
- ¿Qué impactos se pueden observar?
Artículos: - Automatización de aviones puede hacer que pilotos se confíen:
http://www.eluniversal.com.co/mundo/automatizacion-puede-hacer-que-pilotos-se-
confien-144088
- Mejores condiciones, pero con menos mano de obra:
http://www.lanacion.com.ar/1438271-mejores-condiciones-pero-con-menos-mano-de-
obra
- INTA diseñó robot que mejora la producción:
http://www.sinmordaza.com/noticia/131258-inta-diseno-robot-que-mejora-la-
produccion-.html
- AUTOMATICA 2014 se centra en la fabricación de automóviles:
http://www.mundoplast.com/noticia/automatica-2014-centra-la-fabricacion-automoviles-
/73117
- Robots voladores y enjambres de robots: http://www.pagina12.com.ar/diario/ciencia/19-
182317-2011-11-30.html
- La oscura autonomía de los robots: http://www.pagina12.com.ar/diario/ciencia/19-
176197-2011-09-07.html
- Robots que se parecen más a nosotros: http://www.elfinanciero.com.mx/no-te-lo-
pierdas/139-no-te-pierdas/40834-robots-que-se-parecen-mas-a-nosotros.html
La intención de esta actividad es que los estudiantes desarrollen ideas sobre los cambios en la producción y el trabajo debidos a la incorporación de estas tecnologías. En este punto, el docente orienta su intervención a fin de que los estudiantes observen la complejidad de la temática y eviten conclusiones que simplifiquen la problemática. Una vez finalizada la actividad, los estudiantes comparten en el aula de Edmodo con sus compañeros las conclusiones que han elaborado y establecen un debate sobre las relaciones entre la automatización, las formas actuales de producción y el trabajo. Actividad Final Tiempo previsto: 80 minutos

Especialización docente de nivel superior en educación y TIC. Ministerio de Educación de la Nación
11
El docente propone incluir en el documento colaborativo las conclusiones sobre el desarrollo de los sistemas de control y sus implicancias en los aspectos productivos y laborales. Portafolio: cada estudiante crea una carpeta en Dropbox y la comparte con el docente, en ella se incluyen las actividades obligatorias realizadas individualmente y en grupo, y se anexan diferentes documentos sobre el tema abordado. El estudiante crea un documento a modo de índice en el que describe el contenido de la carpeta y el sentido que asumen los diferentes materiales incluidos. Evaluación final La evaluación se realiza a partir del portafolio que cada estudiante creó El docente valora la producción de cada estudiante utilizando la rúbrica incluida en el anexo. Recursos Herramientas disponibles
- RoboMind;
- Google Drive;
- Dropbox;
- Edmodo.
Tutoriales: - Tutorial RoboMind: http://www.youtube.com/watch?v=nCDDmCbYov8
Artículos periodísticos: - Automatización de aviones puede hacer que pilotos se confíen:
http://www.elnuevoherald.com/2013/12/02/1627954/automatizacion-puede-hacer-
que.html#storylink=cpy
- Mejores condiciones, pero con menos mano de obra:
http://www.lanacion.com.ar/1438271-mejores-condiciones-pero-con-menos-mano-de-
obra
- INTA diseñó robot que mejora la producción:
http://www.sinmordaza.com/noticia/131258-inta-diseno-robot-que-mejora-la-
produccion-.html
- AUTOMATICA 2014 se centra en la fabricación de automóviles:
http://www.mundoplast.com/noticia/automatica-2014-centra-la-fabricacion-automoviles-
/73117
- Robots voladores y enjambres de robots: http://www.pagina12.com.ar/diario/ciencia/19-
182317-2011-11-30.html
- La oscura autonomía de los robots: http://www.pagina12.com.ar/diario/ciencia/19-
176197-2011-09-07.html
- Robots que se parecen más a nosotros: http://www.elfinanciero.com.mx/no-te-lo-
pierdas/139-no-te-pierdas/40834-robots-que-se-parecen-mas-a-nosotros.html
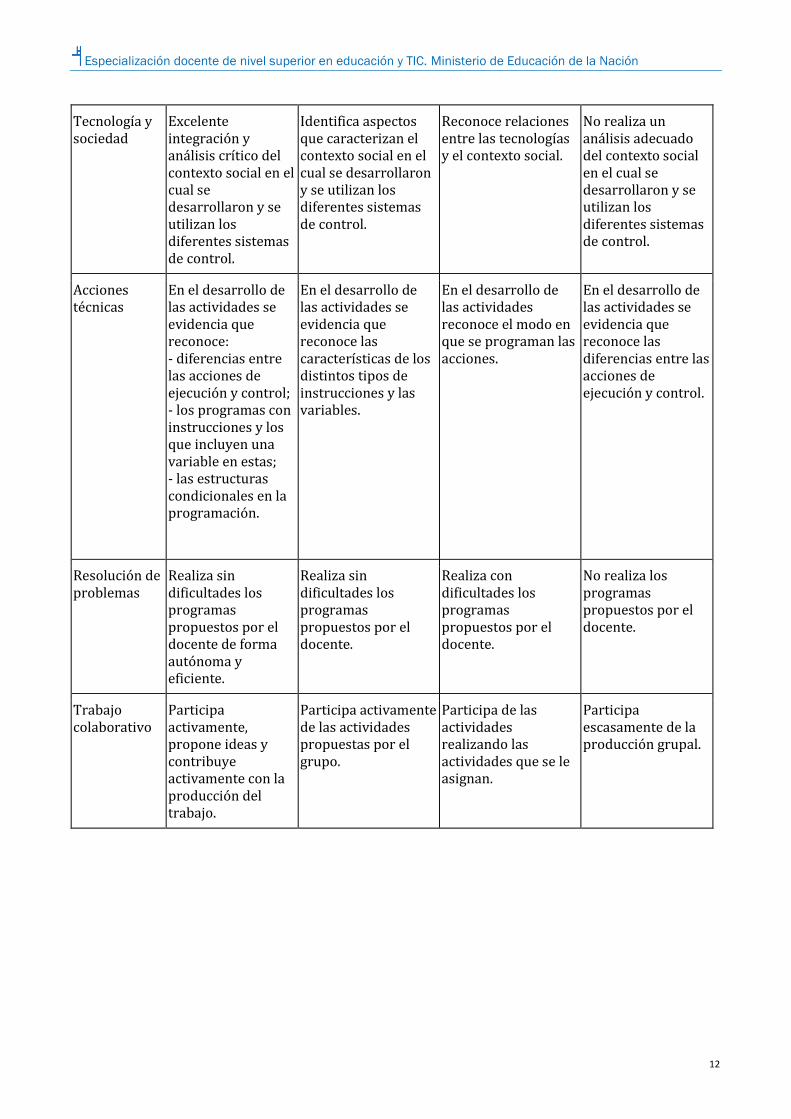
Anexo Rúbrica de evaluación:
CATEGORÍA Excelente Muy bueno Bueno Regular
Especialización docente de nivel superior en educación y TIC. Ministerio de Educación de la Nación
12
Tecnología y sociedad
Excelente integración y análisis crítico del contexto social en el cual se desarrollaron y se utilizan los diferentes sistemas de control.
Identifica aspectos que caracterizan el contexto social en el cual se desarrollaron y se utilizan los diferentes sistemas de control.
Reconoce relaciones entre las tecnologías y el contexto social.
No realiza un análisis adecuado del contexto social en el cual se desarrollaron y se utilizan los diferentes sistemas de control.
Acciones técnicas
En el desarrollo de las actividades se evidencia que reconoce: - diferencias entre las acciones de ejecución y control; - los programas con instrucciones y los que incluyen una variable en estas; - las estructuras condicionales en la programación.
En el desarrollo de las actividades se evidencia que reconoce las características de los distintos tipos de instrucciones y las variables.
En el desarrollo de las actividades reconoce el modo en que se programan las acciones.
En el desarrollo de las actividades se evidencia que reconoce las diferencias entre las acciones de ejecución y control.
Resolución de problemas
Realiza sin dificultades los programas propuestos por el docente de forma autónoma y eficiente.
Realiza sin dificultades los programas propuestos por el docente.
Realiza con dificultades los programas propuestos por el docente.
No realiza los programas propuestos por el docente.
Trabajo colaborativo
Participa activamente, propone ideas y contribuye activamente con la producción del trabajo.
Participa activamente de las actividades propuestas por el grupo.
Participa de las actividades realizando las actividades que se le asignan.
Participa escasamente de la producción grupal.
Especialización docente de nivel superior en educación y TIC. Ministerio de Educación de la Nación
13
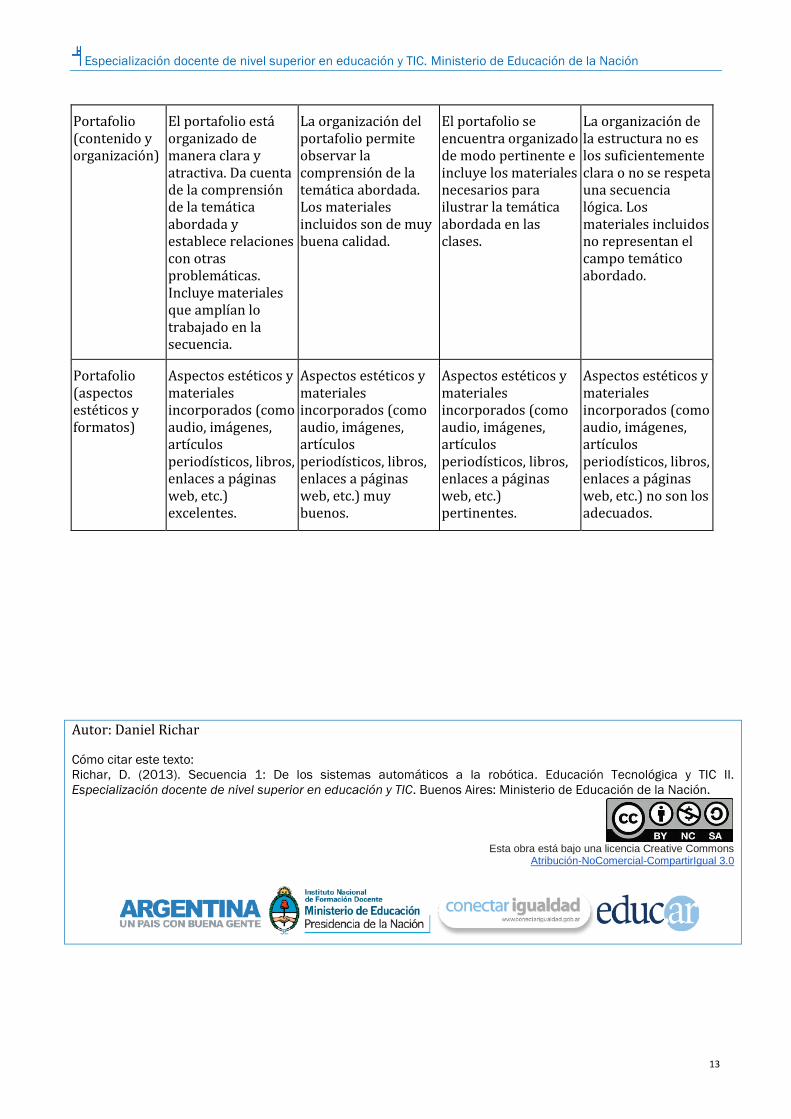
Portafolio (contenido y organización)
El portafolio está organizado de manera clara y atractiva. Da cuenta de la comprensión de la temática abordada y establece relaciones con otras problemáticas. Incluye materiales que amplían lo trabajado en la secuencia.
La organización del portafolio permite observar la comprensión de la temática abordada. Los materiales incluidos son de muy buena calidad.
El portafolio se encuentra organizado de modo pertinente e incluye los materiales necesarios para ilustrar la temática abordada en las clases.
La organización de la estructura no es los suficientemente clara o no se respeta una secuencia lógica. Los materiales incluidos no representan el campo temático abordado.
Portafolio (aspectos estéticos y formatos)
Aspectos estéticos y materiales incorporados (como audio, imágenes, artículos periodísticos, libros, enlaces a páginas web, etc.) excelentes.
Aspectos estéticos y materiales incorporados (como audio, imágenes, artículos periodísticos, libros, enlaces a páginas web, etc.) muy buenos.
Aspectos estéticos y materiales incorporados (como audio, imágenes, artículos periodísticos, libros, enlaces a páginas web, etc.) pertinentes.
Aspectos estéticos y materiales incorporados (como audio, imágenes, artículos periodísticos, libros, enlaces a páginas web, etc.) no son los adecuados.
Autor: Daniel Richar
Cómo citar este texto:
Richar, D. (2013). Secuencia 1: De los sistemas automáticos a la robótica. Educación Tecnológica y TIC II.
Especialización docente de nivel superior en educación y TIC. Buenos Aires: Ministerio de Educación de la Nación.
Esta obra está bajo una licencia Creative Commons
Atribución-NoComercial-CompartirIgual 3.0