pec3
TRANSCRIPT

5/17/2018 PEC3 - slidepdf.com
http://slidepdf.com/reader/full/pec3557200bb49795991699ff7a5 1/10
UNIVERSIDAD NACIONAL
AUTONOMA DE MEXICO
FACULTAD DE INGENIERIA
PRÁCTICA NUMERO 3
―POLEAS‖
ASIGNATURA: LABORATORIO DE ESTATICA
GRUPO: 13
INTEGRANTES:
GOMEZ CASTILLO CARLOS
JUAREZ ENCISO ERICK IVAN
REYES RUIZ JUAN ANGEL
FECHA DE REALIZACION: 20 DE MARZO DEL 2012
FECHA DE ENTREGA: 10 DE ABRIL DEL 2012
5/17/2018 PEC3 - slidepdf.com
http://slidepdf.com/reader/full/pec3557200bb49795991699ff7a5 2/10
INTRODUCCIÓN
Fue Arquímedes el que inventó el sistema de poleas como instrumento para multiplicar el valor deuna fuerza. Se dice que él solo fue capaz de mover un barco varado en el puerto de Siracusaempleando un sistema de poleas.
Las poleas son ruedas que tienen el perímetro exterior diseñado especialmente para facilitar elcontacto con cuerdas o correas. En toda polea se distinguen tres partes: cuerpo, cubo y garganta.
El cuerpo es el elemento que une el cubo con la garganta. En algunos tipos de poleas está formadopor radios o aspas para reducir peso y facilitar la ventilación de las máquinas en las que seinstalan.
El cubo es la parte central que comprende el agujero, permite aumentar el grosor de la polea paraaumentar su estabilidad sobre el eje. Suele incluir un chavetero que facilita la unión de la poleacon el eje o árbol (para que ambos giren solidarios).
La garganta (o canal) es la parte que entra en contacto con la cuerda o la correa y está
especialmente diseñada para conseguir el mayor agarre posible. La parte más profunda recibe elnombre de llanta. Puede adoptar distintas formas (plana, semicircular, triangular...) pero la másempleada hoy día es la trapezoidal.
Una polea, es una máquina simple que sirve para transmitir una fuerza. Se trata de una rueda, generalmente maciza y acanalada en su borde, que, con el curso de una cuerda o cable que sehace pasar por el canal ("garganta"), se usa como elemento de transmisión para cambiar ladirección del movimiento en máquinas y mecanismos. Además, formando conjuntos — aparejos opolipastos — sirve para reducir la magnitud de la fuerza necesaria para mover un peso.
Según definición de Hatón de la Goupillière, «la polea es el punto de apoyo de una cuerda quemoviéndose se arrolla sobre ella sin dar una vuelta completa» actuando en uno de sus extremos la
resistencia y en otro la potencia.
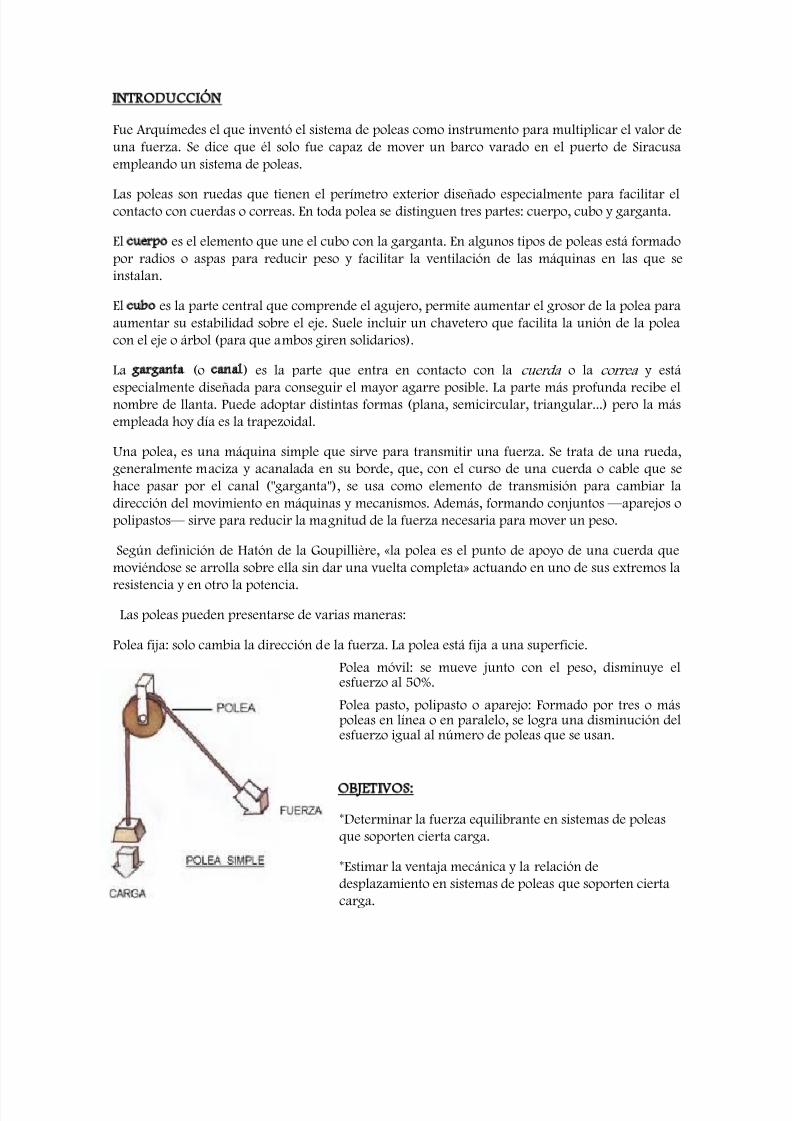
Las poleas pueden presentarse de varias maneras:
Polea fija: solo cambia la dirección de la fuerza. La polea está fija a una superficie.
Polea móvil: se mueve junto con el peso, disminuye elesfuerzo al 50%.
Polea pasto, polipasto o aparejo: Formado por tres o máspoleas en línea o en paralelo, se logra una disminución delesfuerzo igual al número de poleas que se usan.
OBJETIVOS:
*Determinar la fuerza equilibrante en sistemas de poleasque soporten cierta carga.
*Estimar la ventaja mecánica y la relación dedesplazamiento en sistemas de poleas que soporten ciertacarga.

5/17/2018 PEC3 - slidepdf.com
http://slidepdf.com/reader/full/pec3557200bb49795991699ff7a5 3/10
DESARROLLO
ACTIVIDADES DE LA PARTE 1:
1.- En el marco metálico proporcionado colocamos la polea como se nos mostraba en la imagende la práctica constituida por un hilo, en donde por un lado de la polea se colocó el dinamómetro
previamente calibrado y sobre el otro una masa.
2.- Con ayuda del dinamómetro puesto de la actividad anterior determinamos la magnitud de lafuerza que habría de aplicarse para que el peso w se encontrara en equilibrio, los datos seregistraron en la tabla No. 1 como primer evento.
W=mg
3.- Inclinamos el dinamómetro en el plano del arreglo y registramos el valor del peso y de lafuerza en la tabla No. 1 como segundo evento.
Evento W[N] F vertical [N] F inclinada [N]1 250 22 550 5Tabla No. 1
ACTIVIDADES PARTE 2
1.- En el marco metálico se construyo la imagen de la práctica la cuál contaba ya con un armadode dos poleas con un hilo donde sobre un lado de la polea colgaba el dinamómetro sobre el hilo y sobre la otra polea colgaba el peso de una masa de 250g. Esta sería la posición inicial arbitrariadel peso Y1 (W) y del dinamómetro y1 (F).
2.- Anotamos en la tabla No. 2 como primer evento el valor del peso W y el de la fuerza F quehabría que aplicarse para que el peso se encontrara en equilibrio y además las posiciones inicialesdel peso Y1 (W) y la fuerza y1 (F) con ayuda del flexómetro.
3.- Se coloco ahora el arreglo en otra posición distinta para registrar las nuevas posiciones delpeso y2 (W) y de la fuerza y2 (F) del primer evento con ayuda del flexómetro.
4.- SE repitieron las actividades 1, 2 y 3 para otros dos pesos distintos los cuales fueron de 550g y 750g respectivamente, para así poder llenar los datos faltantes de la tabla No. 2.
Evento W[N] F[N] Y1[W] Y1[F] Y2[W] Y2[F] ΔW ΔF VM=W/F RD=ΔF/ΔW %η
1 2427.5 1000 .48 .44 .53 .37 .05 .07 2.4275 1.4 173.4
2 5379 2800 .46 .49 .41 .585 .05 .095 1.9210 1.9 101.
3 7335 3600 .52 .37 .44 .54 .08 .17 2.0375 2.125 95.88
Tabla No.2 # de poleas móviles: 2

5/17/2018 PEC3 - slidepdf.com
http://slidepdf.com/reader/full/pec3557200bb49795991699ff7a5 4/10
ACTIVIDADES PARTE 3
1.- Sobre el marco metálico se construyo ahora la figura No. 4 mostrada en la imagen de lapráctica, la cuál era formada por un armado de 3 poleas, una masa y el dinamómetro.
2.- Anotamos como primer evento de la tabla No. 3 el valor del peso el cual fue de 750g y de la
fuerza que habría de aplicarse para que el peso se encontrara en equilibrio, y con ayuda delflexómetro se calcularon las posiciones iniciales del peso Y1 (W) y de la fuerza Y1 (F)
3.- Movimos el arreglo a otra posición arbitraria y se registraron nuevamente en la tabla No. 3las nuevas posiciones del peso Y2 (W) y de la fuerza Y2 (F) del primer evento.
4.- Se repitieron las actividades 1, 2 y 3 para otros dos pesos distintos los cuales fueron 550g y 950g respectivamente para poder llenar los datos restantes de la tabla No. 3.
Evento W[N] F[N] Y1[W] Y1[F] Y2[W] Y2[F] ΔW ΔF VM=W/F RD=ΔF/ΔW %η
1 7335 1800 .49 .56 .47 .62 .02 .09 4.075 4.5 90.5
2 5379 1100 .48 .595 .47 .64 .01 0.045 4.89 4.5 108.6
3 9291 2300 .47 .62 .5 .53 .03 .09 4.04 3 134.6
Tabla No. 3 # de poleas móviles: 3
CUESTIONARIO
1. Indique ampliamente que es una maquina
La palabra "máquina" se deriva del latín machina palabra, que a su vez deriva del griego
dórico μαχανά (machaná), griego jónico μηχανή (mechané) "invención, la máquina, el
motor" y que a partir μῆχος (mechos), "significa, el remedio conveniente".Una máquina es un conjunto de piezas o elementos móviles y fijos cuyo funcionamientoposibilita aprovechar, dirigir, regular o transformar energía o realizar un trabajo con unfin determinado, es decir, realizar un mismo trabajo con una fuerza aplicada menor,obteniéndose una ventaja mecánica. Esta ventaja mecánica comporta tener que aplicar lafuerza a lo largo de un recorrido (lineal o angular) mayor. Además, hay que aumentar la
velocidad para mantener la misma potencia. Las primeras máquinas eran sencillossistemas que facilitaron a hombres y mujeres sus labores, hoy son conocidas comomáquinas simples. La rueda, la palanca, la polea simple, el tornillo, el plano inclinado, elpolipasto, el torno y la cuña son algunas máquinas simples. La palanca y el planoinclinado son las más simples de todas ellas. En general, las maquinas simples son usadaspara multiplicar la fuerza o cambiar su dirección, para que el trabajo resulte más sencillo,conveniente y seguro.

5/17/2018 PEC3 - slidepdf.com
http://slidepdf.com/reader/full/pec3557200bb49795991699ff7a5 5/10
2. Indique si pueden considerarse todos los arreglos de esta práctica como maquinas.
Pues en realidad todos los arreglos que se hicieron a lo largo de la práctica son maquinassimples, ya que constan de partes o elementos fijos y móviles, los cuales nos ayudaron adistribuir las fuerzas en los diferentes puntos de apoyo.Por otro lado se sabe por teoría que los arreglos de poleas son maquinas simples, y en la
elaboración de la practica solo se manejo con arreglos de poleas, es decir, arreglos demaquinas simples.
3. Dibuje los diagramas de cuerpo libre de los distintos elementos que intervienen en cadaarreglo utilizado (pesa, poleas móviles, poleas fijas, cables etc.)
AREGLO 1
ARREGLO 2
5/17/2018 PEC3 - slidepdf.com
http://slidepdf.com/reader/full/pec3557200bb49795991699ff7a5 6/10
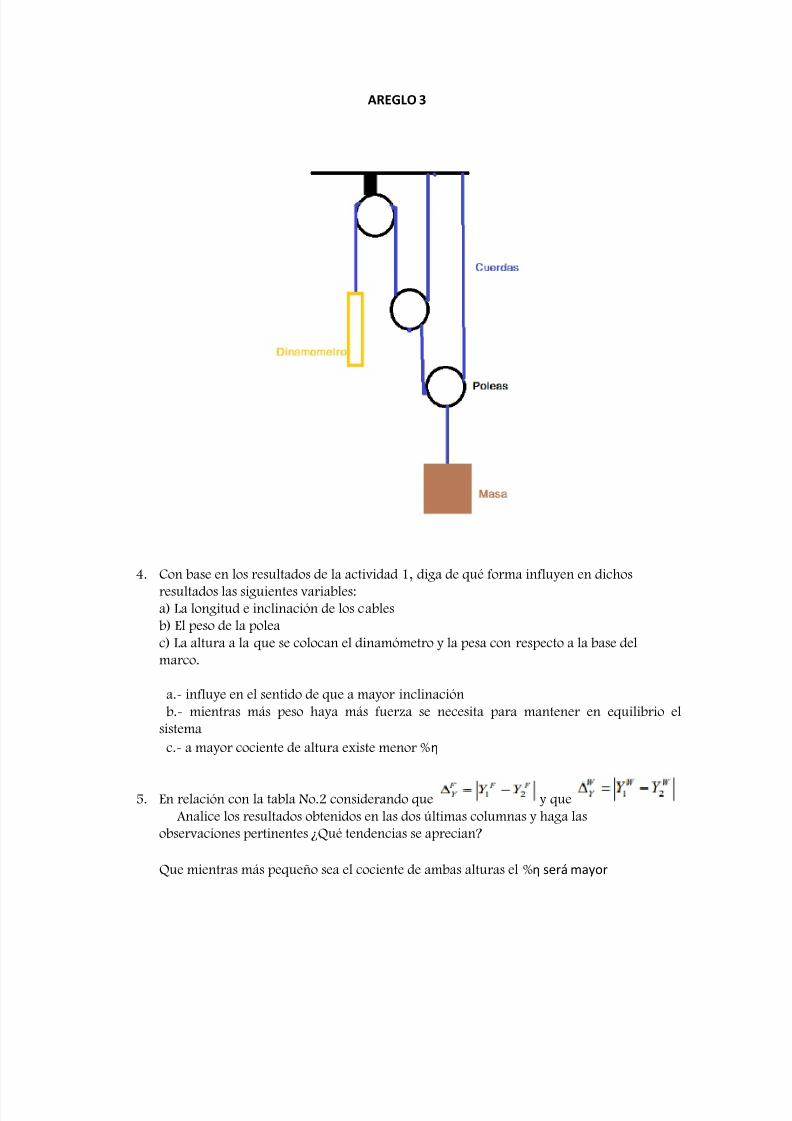
AREGLO 3
4. Con base en los resultados de la actividad 1, diga de qué forma influyen en dichos
resultados las siguientes variables:a) La longitud e inclinación de los cablesb) El peso de la poleac) La altura a la que se colocan el dinamómetro y la pesa con respecto a la base delmarco.
a.- influye en el sentido de que a mayor inclinaciónb.- mientras más peso haya más fuerza se necesita para mantener en equilibrio el
sistema
c.- a mayor cociente de altura existe menor %η
5. En relación con la tabla No.2 considerando que y queAnalice los resultados obtenidos en las dos últimas columnas y haga las
observaciones pertinentes ¿Qué tendencias se aprecian?
Que mientras más pequeño sea el cociente de ambas alturas el %η será mayor
5/17/2018 PEC3 - slidepdf.com
http://slidepdf.com/reader/full/pec3557200bb49795991699ff7a5 7/10
6. En relación con la tabla No.3 Elabore conclusiones, previo análisis de los resultados
obtenidos en los dos últimas columnas
Al igual que en las dos primeras tablas, mientras el cociente de alturas sea más alto, el %η
será menor y por el contrario, si el cociente es pequeño, el%η será mayor.
Asi mismo, observamos que el equilibrio se obtuvo haciendo el análisis correspondiente
de las masas ocuapadas en cada una de las poleas y la orientación que cada una de ellas
tenia dentro del sistema.
7. Sabiendo que idealmente VM = RD = 2^n determine el porcentaje de diferencia con
respecto a los valores promedio VM, RD Y η para cada arreglo.
VM = 4.335
RD = 4
η = 111.28
PARA ARREGLO 1:
VM - VM = 4.075 - 4.335= 0.26
RD - RD = 4.5 – 4 = 0.5
η – η = 90.5 – 111.28=20.78 %
PARA ARREGLO 2:
VM - VM = 4.89 - 4.335= 0.555RD - RD = 4.5 – 4 = 0.5
η – η = 108.67 – 111.28=2.61 %
PARA ARREGLO 3:
VM - VM = 4.04 - 4.335= 0.295
RD - RD = 3 – 4 = 1
η – η = 134.67 – 111.28=23.39 %
8. De qué manera influyen los siguientes factores en los valores de VM, RD y η, para cadauno de los últimos empleados.
A) La separación existente entre las poleas.

5/17/2018 PEC3 - slidepdf.com
http://slidepdf.com/reader/full/pec3557200bb49795991699ff7a5 8/10
Para VM influye en que el esfuerzo aumenta o disminuye dependiendo la separación entre laspoleas y por consecuencia la fuerza registrada por el dinamómetro cambiará también, originandocon ello nuevos resultados.
Para RD en que las posiciones del peso y las de la fuerza Y[W] y Y[F] respectivamente, semodifican y por tanto los resultados en el arreglo cambian.
Para η se modifica totalmente por lo dicho anteriormente ya que ya no es lo mismo lo que sale porlo que entra.
b) La longitud e inclinación de los cables.
Para VM influye en que dependiendo del la longitud e inclinación de los cables habrá unamayor eficiencia y menor esfuerzo para aplicar la fuerza. Recordando que para una poleamóvil la longitud del cable de la que debe tirarse debe ser el doble de la distancia que sedesea subir a la carga.
Para RD en que las posiciones del peso y las de la fuerza Y[W] y Y[F] respectivamente, semodifican y por tanto los resultados en el arreglo cambian, debido a que con una se aplicará unesfuerzo y en la otra si se inclina o modifica la dirección, esta creará una mayor eficiencia, lo cuálarrojará distintos resultados.
Para η se modifica totalmente por lo dicho anteriormente ya que ya no es lo mismo lo que sale porlo que entra.
c) El peso de las poleas.
En que para registrar el valor de la fuerza con el dinamómetro, este va a aumentar o disminuir deacuerdo al peso de las poleas.
d) El dinamómetro de las poleas.
En que al hacer cambio de los pesos de las poleas, el dinamómetro sufrirá un cambio
e) Si se considera que hay otros factores importantes, anótelos.
El que no esté calibrado correctamente el dinamómetro, modificaría los resultados.
9. Mencione diferentes usos que hayan identificado para las poleas.
Se identificaron diferentes usos eficientes de las poleas como son la transmisión de energía con locual ayuda a reducir la magnitud de fuerza necesaria para mover un cierto peso, con lo cualayuda a la eficiencia de levantar un peso grande con un esfuerzo menor. Su aplicación es muy importante por ello en varias ramas de la ingeniería.

5/17/2018 PEC3 - slidepdf.com
http://slidepdf.com/reader/full/pec3557200bb49795991699ff7a5 9/10
CONCLUSIONES:
GOMEZ CASTILLO CARLOS
Nos fue posible comprobar que el equilibrio de un sistema no depende, en este caso del numerode poleas que se coloquen en el mismo sistema, sino que depende exclusivamente del peso que sele de a cada una de ellas.
Esta practica fue muy productiva en lo personal, ya que pude reafirmar algunas cosas vista enteoría y que en su momento no me fueron fáciles de comprender solo con los enunciadospropuestos.
JUAREZ ENCISO ERICK IVAN
Observamos que por medio de las poleas se transmitieron fuerzas que ayudaron a reducir lamagnitud de fuerzas necesarias para mover cuerpos, las poleas además de eso son máquinassimples que se usan para cambiar la dirección del movimiento en máquinas. Ademásdeterminamos las fuerzas equilibrantes en sistemas de poleas las cuales soportaban diferentescargas. Se determino también la ventaja mecánica definiéndose como la razón entre la fuerzaresistente y la fuerza aplicada.
REYES RUIZ JUAN ANGEL
Pudimos cumplir nuestros objetivos planteados antes de comenzar con la práctica, determinamosla fuerza equilibrante en sistemas de poleas que soporten cierta masa y estimamos la ventajamecánica y la relación de desplazamiento en sistemas de poleas móviles que soporten una masa.
Con lo anterior comprobamos q sin importar el número de poleas, podemos establecer un sistemaen equilibrio siempre y cuando le demos la masa adecuada a cada una de ellas.
En general, esta práctica fue sencilla de realizar y se obtuvo un gran aprendizaje.
5/17/2018 PEC3 - slidepdf.com
http://slidepdf.com/reader/full/pec3557200bb49795991699ff7a5 10/10
BIBLIOGRAFÍA
MERIAM, J.L. y KRAIGE, L. Glenn
Mecánica Vectorial para Ingenieros, Estática
3ª ediciónEspaña
Editorial Reverté, S.A. 2000
HIBBELER, Russell C.
Mecánica para Ingenieros, Estática
10ª edición
México
Pearson Prentice Hall, 2004
BEER, Ferdinand, P. y JOHNSTON, E. Rusell
Vector Mechanics for Engineers, Statics
8th edición
U.S.A.McGraw-Hill, 2007