paper proyecto final
TRANSCRIPT
5/14/2018 PAPER Proyecto Final - slidepdf.com
http://slidepdf.com/reader/full/paper-proyecto-final 1/3
UNIVERSIDAD NACIONAL DEL ALTIPLANO INGENIERIA ELECTRONICA
EXAMEN.-
8.- Diseñar e implantar un sistema de control de lalemna en el lago Titicaca. Considerar los aportescientífico-tecnológicos realizados a la fecha por laUNA, PELT y la oficina de proyectos de la RegiónPuno.El registro y monitorización del sistema se encontraraen el laboratorio de instrumentación y control EPIE-UNA-PUNO.
PLANTEAMIENTO DEL PROBLEMA.
En la ciudad de puno ubicado a 3829 m.s.n.m seencuentra el lago navegable más alto del mundo, el turismoes un factor importante para el desarrollo de la región, un
inconveniente que se tiene es la apariencia del LAGOTITICACA, el cual presenta LEMNA, debido al factor humano.
OBJETIVOS
GENERAL
• Diseñar e implementar un sistema de control deLEMNA mediante LABVIEW.
ESPECIFICOS
•Realizar la detección de LEMNA con procesamiento digital de imágenes enLABVIEW
• Detección del área afectada.• Realizar la monitorización respectiva del
software
INFORME
Para realizar la detección de LEMNA en el lago Titicaca, seusó LABVIEW, el cual nos ofrece las herramientasnecesarias para desarrollar el proyecto.
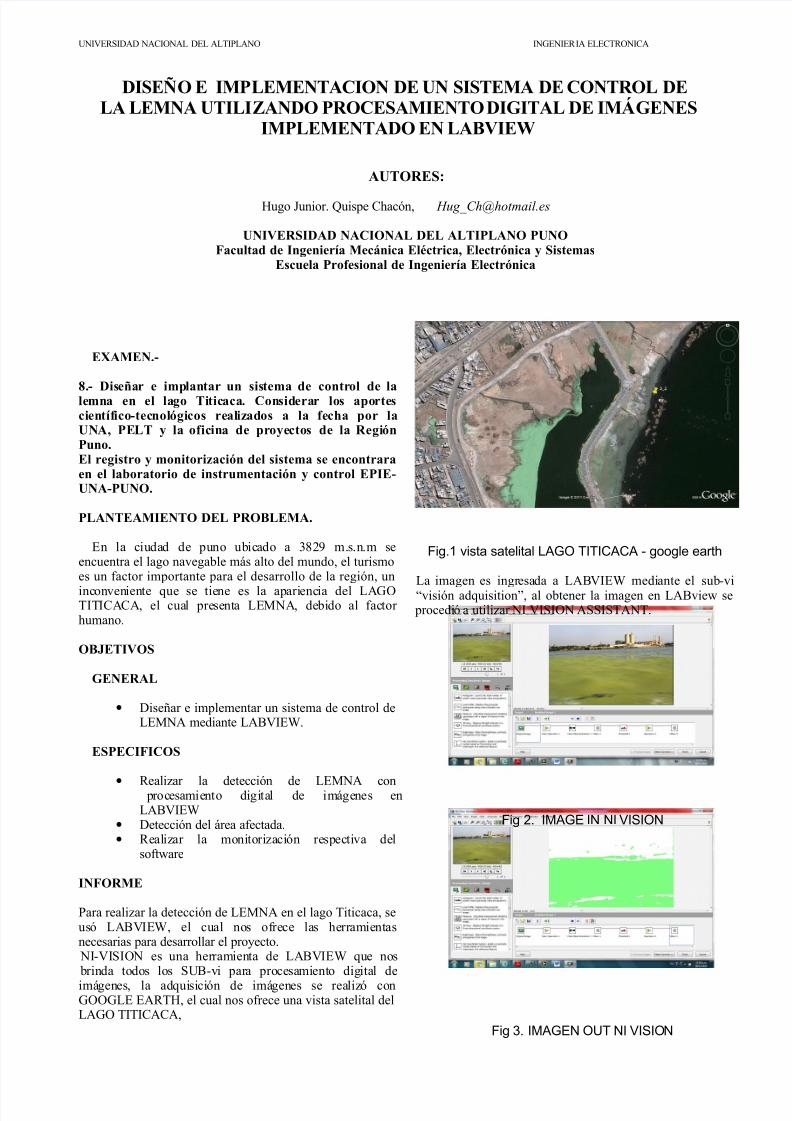
NI-VISION es una herramienta de LABVIEW que nos brinda todos los SUB-vi para procesamiento digital deimágenes, la adquisición de imágenes se realizó conGOOGLE EARTH, el cual nos ofrece una vista satelital delLAGO TITICACA,
Fig.1 vista satelital LAGO TITICACA - google earth
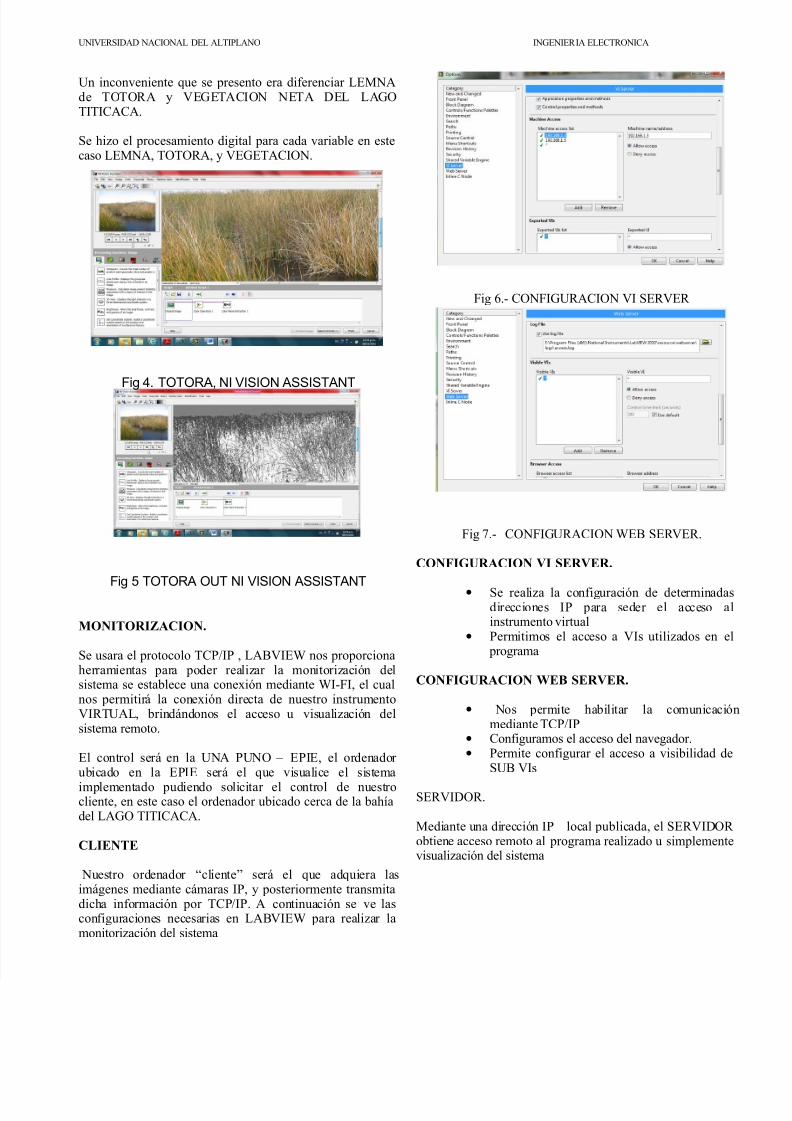
La imagen es ingresada a LABVIEW mediante el sub-vi“visión adquisition”, al obtener la imagen en LABview se
procedió a utilizar NI VISION ASSISTANT.
Fig 2. IMAGE IN NI VISION
Fig 3. IMAGEN OUT NI VISION
DISEÑO E IMPLEMENTACION DE UN SISTEMA DE CONTROL DELA LEMNA UTILIZANDO PROCESAMIENTO DIGITAL DE IMÁGENES
IMPLEMENTADO EN LABVIEW
AUTORES:
Hugo Junior. Quispe Chacón, [email protected]
UNIVERSIDAD NACIONAL DEL ALTIPLANO PUNOFacultad de Ingeniería Mecánica Eléctrica, Electrónica y Sistemas
Escuela Profesional de Ingeniería Electrónica
5/14/2018 PAPER Proyecto Final - slidepdf.com
http://slidepdf.com/reader/full/paper-proyecto-final 2/3
UNIVERSIDAD NACIONAL DEL ALTIPLANO INGENIERIA ELECTRONICA
Un inconveniente que se presento era diferenciar LEMNAde TOTORA y VEGETACION NETA DEL LAGOTITICACA.
Se hizo el procesamiento digital para cada variable en estecaso LEMNA, TOTORA, y VEGETACION.
Fig 4. TOTORA, NI VISION ASSISTANT
Fig 5 TOTORA OUT NI VISION ASSISTANT
MONITORIZACION.
Se usara el protocolo TCP/IP , LABVIEW nos proporcionaherramientas para poder realizar la monitorización delsistema se establece una conexión mediante WI-FI, el cualnos permitirá la conexión directa de nuestro instrumentoVIRTUAL, brindándonos el acceso u visualización delsistema remoto.
El control será en la UNA PUNO – EPIE, el ordenador ubicado en la EPIE será el que visualice el sistema
implementado pudiendo solicitar el control de nuestrocliente, en este caso el ordenador ubicado cerca de la bahíadel LAGO TITICACA.
CLIENTE
Nuestro ordenador “cliente” será el que adquiera lasimágenes mediante cámaras IP, y posteriormente transmitadicha información por TCP/IP. A continuación se ve lasconfiguraciones necesarias en LABVIEW para realizar lamonitorización del sistema
Fig 6.- CONFIGURACION VI SERVER
Fig 7.- CONFIGURACION WEB SERVER.
CONFIGURACION VI SERVER.
• Se realiza la configuración de determinadasdirecciones IP para seder el acceso alinstrumento virtual
• Permitimos el acceso a VIs utilizados en el programa
CONFIGURACION WEB SERVER.
• Nos permite habilitar la comunicaciónmediante TCP/IP
• Configuramos el acceso del navegador.• Permite configurar el acceso a visibilidad de
SUB VIs
SERVIDOR.
Mediante una dirección IP local publicada, el SERVIDOR obtiene acceso remoto al programa realizado u simplementevisualización del sistema

5/14/2018 PAPER Proyecto Final - slidepdf.com
http://slidepdf.com/reader/full/paper-proyecto-final 3/3