motores electricos para la industria - …€¦ · motor electrico los motores eléctricos son...
TRANSCRIPT
MOTORES ELECTRICOS PARA LA INDUSTRIA
Ing. José H. Rosales Fernández

MOTOR ELECTRICO Los motores eléctricos son máquinas eléctricas rotatorias que transforman la energía eléctrica en energía mecánica.
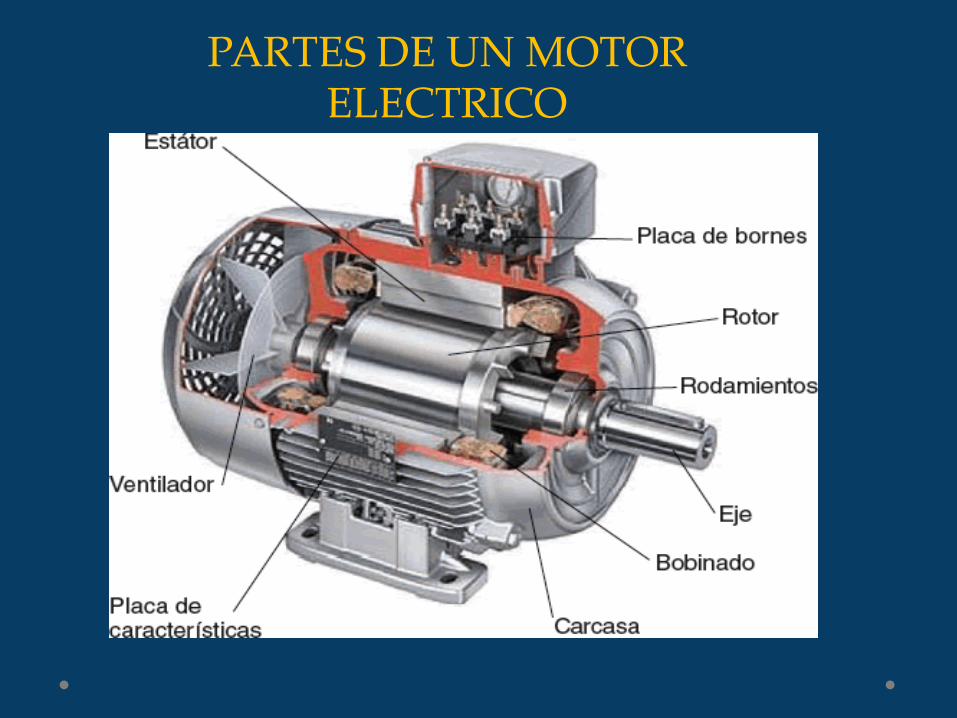
PARTES DE UN MOTOR ELECTRICO

PARTES DEL MOTOR
Estator - Constituye la parte fija del motor, elemento que opera como base permitiendo la rotación del motor. - El estator no se mueve mecánicamente, pero si
magnéticamente. Existen dos tipos: a) Estator de polos salientes. b) Estator ranurado. El estator está constituido por un conjunto de láminas de acero al silicio, que permite que pase a través de él
el flujo magnético con facilidad; aloja los devanados llamados polos magnéticos. Los polos de un motor siempre son pares.
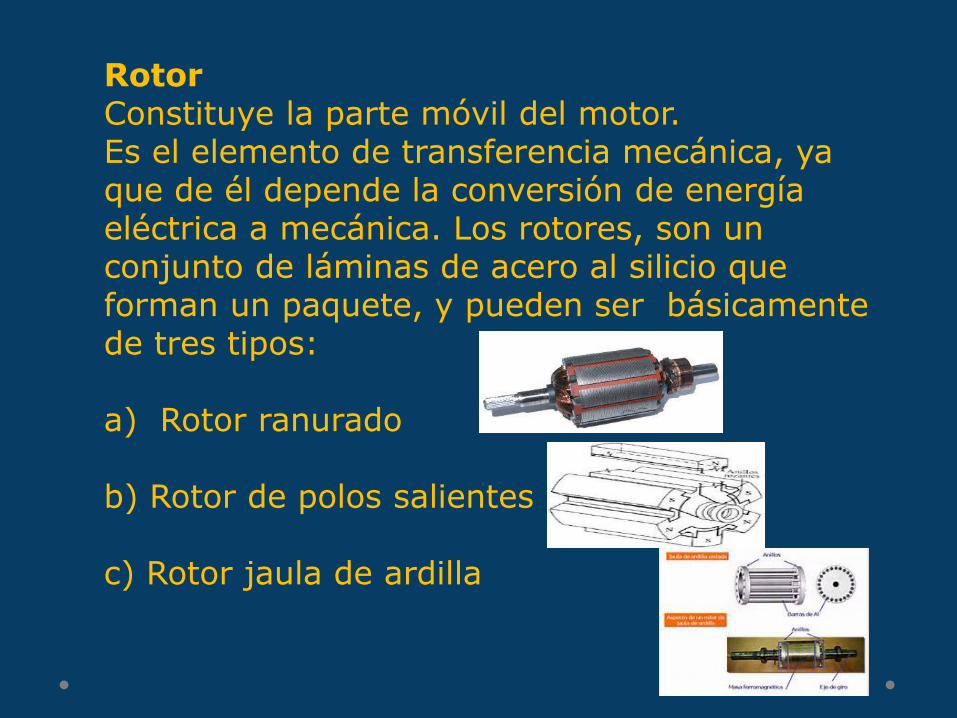
Rotor Constituye la parte móvil del motor. Es el elemento de transferencia mecánica, ya que de él depende la conversión de energía eléctrica a mecánica. Los rotores, son un conjunto de láminas de acero al silicio que forman un paquete, y pueden ser básicamente de tres tipos: a) Rotor ranurado b) Rotor de polos salientes c) Rotor jaula de ardilla

Tipos de bobinas Un motor monofásico tiene dos grupos
de devanados en el estator:
• Devanado principal o devanado de trabajo.
• Devanado auxiliar o de arranque.
Estos dos devanados están conectados
en paralelo, al voltaje de línea.
El devanado de trabajo está formado por conductores gruesos y tiene más espiras que el devanado de arranque, el devanado de arranque tiene menos espiras de sección delgada.

Carcasa.
Es la parte que protege y cubre al estator y al rotor.
a) Totalmente cerrada
b) Abierta
c) A prueba de goteo
d) A prueba de explosiones
e) De tipo sumergible.
Caja de Conexiones.
La caja de conexiones (placa de bornes) que protege a los conductores que alimentan al motor, resguardándolos de la operación mecánica del mismo.

VIDEO
Introducción a los motores eléctricos


Clasificación motores de corriente directa
Concepto básico que debe conocerse:
Funcionamiento con carga y en vacío.
• Un motor funciona con carga al realizar un determinado trabajo (jalando, empujando objetos o soportando cualquier resistencia externa o carga) que lo obliga a absorber energía mecánica.
Por ejemplo: una batidora encuentra resistencia al batir mayonesa; el motor de una grúa soporta las cargas que eleva, los elementos mecánicos de la grúa,…; el motor de un coche eléctrico soporta numerosas cargas: el peso de los pasajeros, el peso del propio vehículo, la resistencia que ofrece la superficie del terreno,…

• Un motor funciona en vacío, cuando el motor no está arrastrando ningún objeto, ni soportando ninguna resistencia externa.
En este caso, el par resistente se debe únicamente a factores internos.
Los motores de corriente continua se clasifican según la forma de conexión de las bobinas inductoras e inducidas entre sí. Motor de excitación independiente. Motor serie. Motor de derivación o motor shunt. Motor compoud.
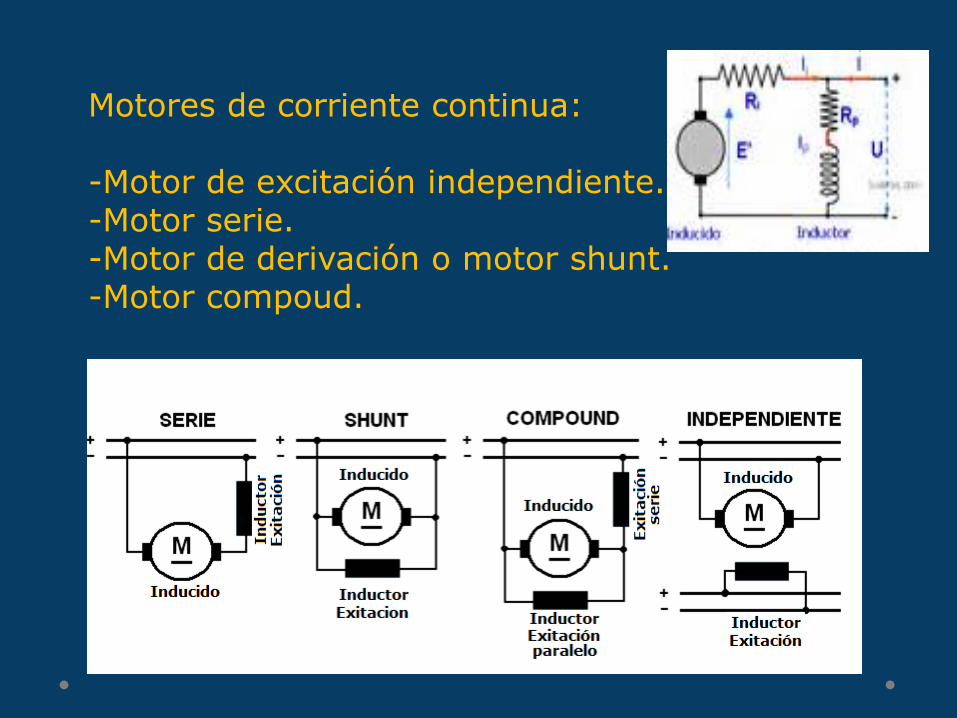
Motores de corriente continua: -Motor de excitación independiente. -Motor serie. -Motor de derivación o motor shunt. -Motor compoud.
APLICACIONES DEL MOTOR DE CORRIENTE CONTINUA:
• Trenes de laminación reversibles.
• Trenes Konti. Son trenes de laminación en
caliente con varios bastidores.
• Cizallas en trenes de laminación. Potencia: 9,2 KW/ 12 CV
• Motores para la industria del papel.
• Máquinas herramientas, máquinas extractoras, elevadores,
ferrocarriles.
•Los motores desmontables para papeleras, trefiladoras,
bobinadoras, tornos grandes.
•Grúas que requieran precisión de movimiento con carga
variable (cosa casi imposible de conseguir con motores de
corriente alterna).

SERVOMOTORES
Un servomotor es un motor de corriente continua que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación, y mantenerse estable en dicha posición.
La Misma Potencia con Ahorro para
la Industria

Partes de un servomotor
Motor de corriente continua, es el elemento que le brinda movilidad al servo. Cuando se aplica un potencial a sus dos terminales, este motor gira en un sentido a su velocidad máxima. Si el voltaje es inverso, el sentido de giro también se invierte.
Engranajes reductores Se encargan de convertir gran parte de la velocidad de giro del motor de corriente continua en torque o fuerza.
Circuito de control Este circuito es el encargado del control de la posición del motor. Recibe los pulsos de entrada y ubica al motor en su nueva posición dependiendo de los pulsos recibidos.

Funcionamiento El sistema servo se comunica mediante pulsos eléctricos a través de un circuito de control para determinar el ángulo de posición del motor. La longitud del pulso determinará los giros de motor.
Las aplicaciones específica se hacen mediante
programas (BasicX24, Basic Stamp o Atom Pro, etc) y podría ser en forma inalámbricas.
Dicho accionamiento aplica la cantidad de potencia necesaria sobre el motor para de esa forma mover la carga.

Aplicaciones La aplicación de los servomotores depende del trabajo a realizar. -Trabajo de etiquetado de productos -Automatización de plantas para producto farmacéuticos y/o alimenticios. -Cadena de producción de vehículos. -Maquinas para cortar con laser. -etc.
Ventajas -Utiliza la energía necesaria para realizar un determinado trabajo
-El giro y su velocidad son controladas en forma proporcional. -Tienen mayor capacidad de sobrecarga de trabajo, entre 300 y 400 por ciento más, haciéndolos más rápido y potente que su velocidad y torque nominal. -Requieren menor mantenimiento a falta de fricción. -El tamaño de los servomotores es menor (entre 40 y 50 por ciento más livianos que los hidráulicos), esto no incide en su potencia. -Tiene buena capacidad de torque. -En fuerza y potencia, igualan a los motores mecánicos e hidráulicos. -Gracias a estas habilidades, los servos se usan en aplicaciones como corte.

Motores de corriente alterna
Por el fácil manejo de
transmisión, distribución y
transformación de la C.A,
se ha constituido en la
corriente con más uso en la sociedad moderna. Es
por ello que los motores de C.A, son los más
normales y con el desarrollo tecnológico se ha
conseguido un rendimiento altísimo que hace que
más del 90 % de los motores instalados sea de C.A.

Motores de corriente Alterna
• Motores síncronos. Los motores síncronos son motores de corriente alterna en el que la rotación del eje está sincronizada con la frecuencia de la corriente de alimentación
• Motores asíncronos. Los motores asíncronos son motores de corriente alterna en el que la rotación del eje es menor que la frecuencia del campo de sincronismo.
•

MOTOR MONOFÁSICO: • De bobinado auxiliar. En este motor utilizará un devanado auxiliar que solo se conectará durante el arranque, después funcionará únicamente con el devanado de trabajo. Aplicación: Es muy utilizado en los compresores de los
frigoríficos que tenemos en nuestras casas.
• Universal. El motor monofásico universal es un tipo de motor eléctrico que puede funcionar tanto con corriente continua (C.C.) como con corriente alterna. (A.C.) Aplicación:
Se emplea en máquinas herramientas portátiles de todo tipo, electrodomésticos pequeños, etc
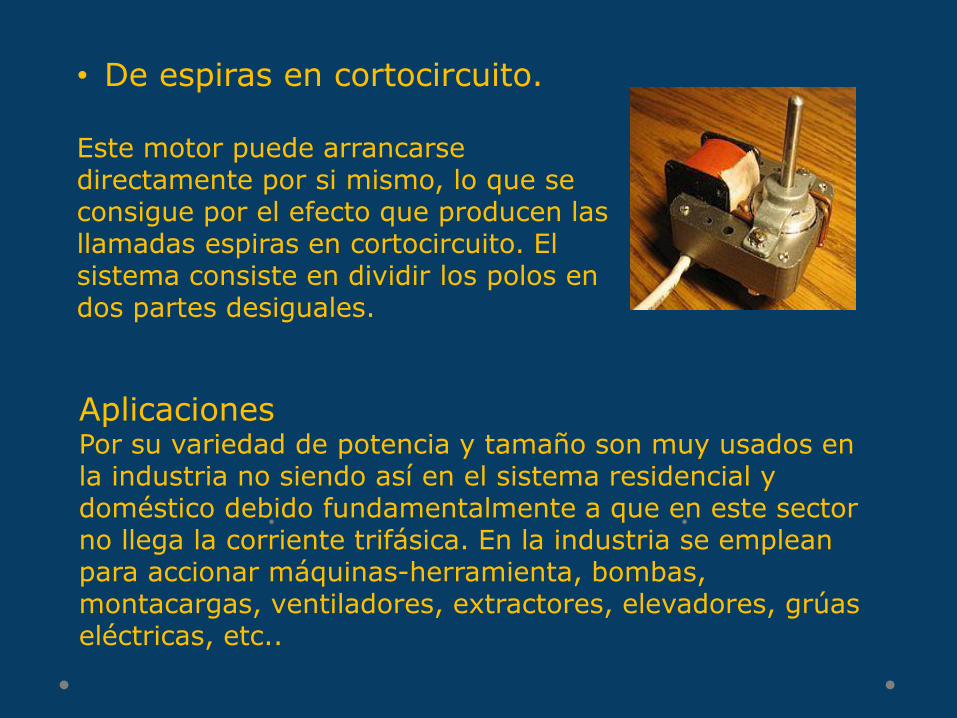
• De espiras en cortocircuito.
Este motor puede arrancarse directamente por si mismo, lo que se consigue por el efecto que producen las llamadas espiras en cortocircuito. El sistema consiste en dividir los polos en dos partes desiguales.
Aplicaciones Por su variedad de potencia y tamaño son muy usados en la industria no siendo así en el sistema residencial y doméstico debido fundamentalmente a que en este sector no llega la corriente trifásica. En la industria se emplean para accionar máquinas-herramienta, bombas, montacargas, ventiladores, extractores, elevadores, grúas eléctricas, etc..

MOTOR TRIFÁSICO. Es una máquina eléctrica rotativa, capaz de convertir la energía eléctrica trifásica, en energía mecánica. La energía eléctrica trifásica origina campos magnéticos rotativos en el bobinado del estator lo que provoca que el arranque de estos motores no necesite circuito auxiliar, son más pequeños y livianos que uno monofásico. Los motores eléctricos trifásicos, se fabrican de diversas potencias, desde una fracción de caballo hasta varios miles de caballos de fuerza (HP).

Ventajas En diversas circunstancias presenta muchas ventajas: •A igual potencia, su tamaño y peso son más reducidos. •Se pueden construir de cualquier tamaño. •Tiene un par de giro elevado. •Su rendimiento es muy elevado (típicamente en torno al 75%, a más). •No emite contaminantes. •Máquinas que pueden trabajar con 2 tensiones 400V y 230 V. •El control de la velocidad es de forma electrónica.

Motor trifásico: -De rotor bobinado El rotor devanado o bobinado,
como su nombre lo indica, lleva
unas bobinas que se conectan a
unos anillos deslizantes colocados
en el eje; por medio de unas
escobillas se conecta el rotor a
unas resistencias que se pueden
variar hasta poner el rotor en corto
circuito al igual que el eje de jaula
de ardilla.

-Rotor en cortocircuito (jaula de ardilla)
Un rotor de jaula de ardilla es la parte que rota usada comúnmente en un motor de inducción de corriente alterna. Un motor eléctrico con un rotor de jaula de ardilla también se llama "motor de jaula de ardilla". En su forma instalada, es un cilindro montado en un eje.

Las aplicaciones típicas de los motores trifásicos de inducción con rotor jaula de ardilla. Comprenden las bombas centrífugas de impulsión, las máquinas herramientas , sopladores y fajas transportadoras. El motor está diseñado para servicio pesado de arranque, encuentra su mayor aplicación con cargas como cizallas o troqueles, que necesitan el alto par con aplicación a carga repentina la regulación de velocidad en esta clase de motores es la peor.
La clasificación de el uso de los motores en la industria está en función al trabajo que realizará (característica de la carga) En todas estas máquinas, los torques de arranque son diferentes y con toda seguridad, los ciclos de trabajo varían de una instalación a otra. Ventiladores: Tecnología: trifásico, 8 polos, 2 polos, 4 polos, 6 polos Voltaje: 400 V, 380V Aplicaciones: para la industria química, de ventiladores, para máquina herramienta, para la industria minera, para aplicaciones de bombeo Par: Mín.: 2.5 Nm (1.84 ft.lb) Máx.: 3205 Nm (2363.89 ft.lb) Potencia: Mín.: 0.18 kW (0.24 hp) Máx.: 375 kW (502.88 hp) Velocidad de rotación: Mín.: 695 rpm (4366.81 rad.min-1) Máx.: 2980 rpm (18723.89 rad.min-1)

CARACTERISTICAS IMPORTANTE EN LOS MOTORES TRIFÁSICOS
Par motor: Es el momento de fuerza que ejerce un motor sobre el eje de transmisión de potencia.
Par de arranque: Es el que desarrolla el motor para romper la inercia y comenzar a girar.
Par nominal: Es el que produce el motor para desarrollar sus condiciones de trabajo.
Rendimiento: El rendimiento es un concepto asociado al trabajo realizado por las máquinas, buen rendimiento con poco trabajo.

PLACA DE CARACTERISTICAS Cada motor debe contar con una placa de características, fácilmente visible y firmemente sujeta al motor

IM B5 SIEMENS

La velocidad nominal de rotación del motor es la velocidad que indica el fabricante, se diferencia de la velocidad de sincronismo en el deslizamiento nominal SN. SN = (nS – nN) 100/ nS siendo: SN = deslizamiento nominal (%) nS = velocidad de sincronismo (rpm) nN = velocidad nominal de rotación (rpm) El par motor nominal se calcula de la siguiente forma: MN = 9,55 x PN (•1.000/ nS) MN = par motor nominal (Nm) nS = velocidad sincrónica (rpm) PN = potencia nominal (kW)

El par motor o torque es el momento de fuerza que ejerce un motor sobre el eje de transmisión de potencia o, dicho de otro modo, la tendencia de una fuerza para girar un objeto alrededor de un eje, punto de apoyo, o de pivote. La potencia desarrollada por el par motor es proporcional a la velocidad angular del eje de transmisión, viniendo dada por: P= Mw donde: • P es la potencia (en W) • M es el par motor (en N·m) • w es la velocidad angular (en rad/s)
SELECCIÓN Y APLICACIÓN DE MOTORES ELÉCTRICOS
GESTIÓN INICIAL Siempre que se necesite adquirir un motor eléctrico, hay que tener en cuenta lo siguiente:
1.¿Es una instalación nueva o existente? 2.¿Cuáles son las condiciones de la red eléctrica? 3.¿Cuál es la carga que el motor va a accionar? 4.¿Cuáles son las condiciones medioambientales? 5.¿Cuál va a ser el tiempo de recuperación de la inversión? 6.¿Qué tipo de normas debe cumplir el motor? 7.¿Cómo va a ser hecho el arranque del motor?
Obviamente, ¿Cuáles son las características de potencia y velocidad requeridas del motor?

EL MOTOR Dentro del universo de motores eléctricos, el motor trifásico de inducción jaula de ardilla, es el que más se usa en el ámbito industrial. Característica:
• Bajo costo • Bajo mantenimiento • Fácil de adquirir • Alto grado de protección • Pocos componentes • Robusto • Por carecer de chispas internas, puede instalarse en
ambientes de riesgo. • Con el avance de la electrónica de potencia, hoy en
día se puede variar la velocidad, llegando incluso a desplazar el motor de corriente continua.

LAS NORMAS Existen dos normas bajo las cuales se fabrican los motores.
• IEC Comisión Electrotécnica Internacional que es acogida por la gran mayoría de países y especialmente los europeos (dimensiones IEC son en milímetros).
• NEMA Asociación Nacional de Fabricantes de Equipos Eléctricos. Es una norma nacional de Estados Unidos, pero es común en muchos países (dimensiones NEMA en pulgadas).
EL LUGAR DE INSTALACIÓN. Por norma, todos los motores están diseñados para operar en un ambiente con temperatura no superior a 40 ºC y en una altura no superior a 1000 metros sobre el nivel del mar. La instalación por encima de estas condiciones hará que el motor deba ser operado a una carga menor de la nominal. Las propiedades refrigerantes disminuyen, a mayor altitud, el aire toma una densidad mayor y se tendrá menor flujo de aire.

LA CARGA
La carga es la que define la potencia y velocidad del motor. • Es conveniente hacer un estudio de cuál será el
momento de inercia, la curva Par-Velocidad de la carga; para definir cómo será el comportamiento dinámico del motor con su máquina de trabajo.
• Las máquinas como bombas y ventiladores tienen
un comportamiento específico diferente de molinos, trituradoras y diferente de bandas transportadoras o de máquinas herramientas o elevadores. En todas estas máquinas, los torques de arranque son diferentes y con toda seguridad, los ciclos de trabajo varían de una instalación a otra.
LA RED Las principales características que identifican un red eléctrica son la tensión (voltaje) y frecuencia. En el Perú tensión normalizada es 60 Hz. Por lo usual la red industrial es la trifásica de la cual se puede extraer dos tensiones 400 voltios y 230 voltios.
EL ARRANQUE Uno de los momentos más críticos para el motor, la red y la carga es el arranque.
Existen los siguientes tipos de arranque: 1. Directo. El motor tendrá una corriente de arranque
normal y un par de arranque normal.
2. Estrella-Triángulo. La corriente y el torque se reducen a la tercera parte (hasta tres veces la corriente nominal).
3. Por Autotransformador. El autotransformador es fabricado para entregar al motor una tensión menor de la nominal (puede estar entre el 30% y el 70% ) dependiendo de la aplicación.
4. Arranque electrónico suave. En este método, el arrancador alimenta el motor con una tensión reducida y gradualmente aumenta la tensión hasta la tensión de régimen.

ARRANQUE ESTRELLA TRIANGULO El procedimiento más utilizado en el arranque de los motores trifásicos, es el estrella triángulo (> a 10 HP) El objetivo es que la red no se desestabilice por las altas corrientes consumidas durante el arranque directo.


POTENCIA Y EFICIENCIA DEL MOTOR Un motor eléctrico es una máquina que transforma potencia eléctrica tomada de la red en potencia energía mecánica en el eje. La potencia eléctrica obedece a la siguiente relación P = √3 * V * I * Cos φ donde P: Potencia en kW V: Voltaje o tensión en voltios I: corriente en amperios Cos φ: Factor de potencia La potencia mecánica obedece a la siguiente relación P = T * n / 9550 donde P: Potencia en kW T: torque en Nm
El torque es la capacidad del motor de hacer girar cargas. Al seleccionar un motor, lo primero que se debe considerar es cuál es la velocidad de rotación y cuál será el torque requerido del motor.
EFICIENCIA Capacidad para realizar o cumplir adecuadamente una función Toda máquina consume más potencia de la que entrega, por lo que es importante que consideremos el término de eficiencia. La potencia que el motor consume y no convierte en potencia de salida son pérdidas. La eficiencia se calcula según la siguiente relación η = Ps / Pe donde: Ps es la potencia de salida, (potencia en el eje) Pe es la potencia de entrada (potencia eléctrica) De esta forma, a mayor eficiencia, menor desperdicio y consecuentemente menores costos de operación.

VIDEO Autos Eléctricos