mecanismos de retorno rapido.docx
TRANSCRIPT
MECANISMOS DE RETORNO RAPIDO
PRESENTACIONEn muchas operaciones industriales se requiere deslizar una herramienta para realizar un trabajo. Para automatizar estas operaciones se suele emplear un mecanismo que cuenta con una deslizadera en la que se fija la herramienta que realiza el trabajo. Hay ocasiones en las que, por la naturaleza de la operación, el trabajo se realiza solamente en un sentido del movimiento. En estos casos resulta especialmente útil hacer que la herramienta vuelva rápidamente a la posición inicial para realizar una nueva pasada. Así, se busca un mecanismo cuyo eslabón final es una deslizadera de manera que ésta posea un movimiento de avance relativamente lento (cuando la herramienta trabaja) y un movimiento de retroceso relativamente rápido (cuando la herramienta no trabaja).
Uno de los mecanismos más empleados es el que se muestra a continuación. Conducido por una manivela que se mueve con velocidad angular constante (generalmente por medio de un motor eléctrico), produce en la deslizadera un movimiento lento de avance (hacia la izquierda) y rápido de retroceso (hacia la derecha). Como la velocidad angular de la manivela es constante, el tiempo de avance es proporcional al ángulo de manivela dedicado al avance, e igualmente con el retroceso.
Se Usan Especialmente En Máquinas-Herramienta, En Las Que Solo Se Realiza A Pequeña Velocidad El Desplazamiento De Trabajo, Pero En El Que Interesa, Que Una Vez Que La Máquina A Terminado Una Pasada, Vuelva Al Punto De Partida En El Menor Tiempo Posible.
Estos mecanismos se emplean en máquinas herramientas que tienen una carrera lenta de corte y una carrera rápida de retorno para una velocidad angular constante de la manivela motriz. Existen varios tipos de mecanismos de retorno rápido que se describen a continuación. Los mecanismos se usan para realizar operaciones repetitivas tales como empujar piezas a lo largo de una línea de montaje, sujetar piezas juntas mientras se sueldan o para doblar cajas de cartón en una máquina de embalaje automatizada. En esta clase de aplicaciones resulta a menudo.

MECANISMOS DE RETORNO RAPIDO
DEFINICION
En ingeniería mecánica un mecanismo de retorno rápido es un mecanismo
utilizado en herramientas de maquinado para realizar cortes sobre una pieza.
Se compone de un sistema de engranajes acoplado a un mecanismo de biela
- manivela, en el cual se encuentra la parte que realiza el corte.
Los mecanismos de retorno rápido son aquellos en los que el tiempo invertido en
la carrera de ida es diferente al invertido en la carrera de vuelta.
La diferencia de tiempos entre la carrera de ida y la de retorno es debido a que,
suponiendo la velocidad angular del eslabón de entrada constante, el eslabón de
entrada debe recorrer un ángulo mayor durante la carrera de ida que durante la
del retorno. Los tiempos invertidos en las carreras de ida y de retorno. Serán
proporcionales a los ángulos girados por el eslabón de entrada durante esas
carreras.
TIPOS DE MECANISMOS DE RETORNO RAPIDO
1.MECANISMO DE WHITWORTH
El mecanismo de retorno rápido de Whitworth convierte el movimiento rotatorio
en movimiento alternativo, pero a diferencia de la manivela y deslizador, el
delantero de movimiento alternativo es a un ritmo diferente a la atrasada stroke.
En la parte inferior de la unidad brazo, la tasa solo se mueve a través de pocos
grados a barrer el brazo de izquierda a derecha, pero se necesita el resto de la
revolución para que el mecanismo del brazo vuelva.
Aplicaciones del mecanismo de whitworth
El mecanismo de retorno rápido de Whitworth se utiliza en la industria para
realizar operaciones repetitivas como alimentar esas en una línea de ensamble
y corte de material [1, 2, 3]. En estas aplicaciones a menudo resulta
conveniente utilizar motores eléctricos de velocidad constante, sin embargo,
pueden utilizarse servomotores para mejorar el comportamiento dinámico del
mecanismo como se plantea en este trabajo. No obstante es necesario tomar
en cuenta los requerimientos de energía y tiempo para el diseño del
mecanismo. Estos mecanismos presentan una carrera lenta y potente al

avance, seguida de por una carrera de retorno rápida. El mecanismo analizado
corresponde a un alimentador continuo de partes para el marcado laser de
anillos a gasolina como se muestra en las figuras.
En operaciones repetitivas existe por lo común una parte del ciclo en la que el
mecanismo se somete a una carga, llamada carrera de avance o de trabajo, y
una parte del ciclo es conocida como carrera de retorno en la que el
mecanismo no efectúa trabajo sino que se limita a devolverse para repetir la
operación.
pág. 4

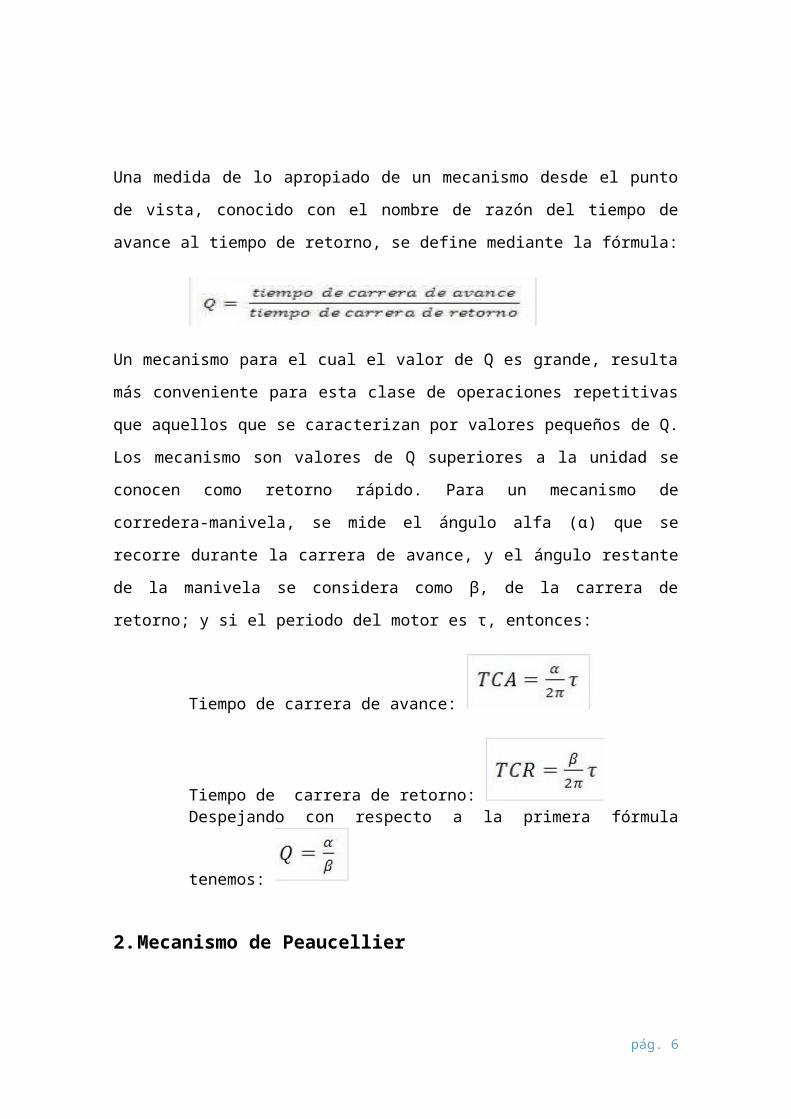
Una medida de lo apropiado de un mecanismo desde el punto de vista,
conocido con el nombre de razón del tiempo de avance al tiempo de retorno, se
define mediante la fórmula:
Un mecanismo para el cual el valor de Q es grande, resulta más conveniente
para esta clase de operaciones repetitivas que aquellos que se caracterizan por
valores pequeños de Q. Los mecanismo son valores de Q superiores a la
unidad se conocen como retorno rápido. Para un mecanismo de corredera-
manivela, se mide el ángulo alfa (α) que se recorre durante la carrera de
avance, y el ángulo restante de la manivela se considera como β, de la carrera
de retorno; y si el periodo del motor es τ, entonces:
Tiempo de carrera de avance:
Tiempo de carrera de retorno:
Despejando con respecto a la primera fórmula tenemos:
2.Mecanismo de Peaucellier
El mecanismo de Peaucellier, ideado en 1873 por el capitán de ingenieros del
ejército francés Charles Nicholas Peaucellier, permite hacer que un punto del
mismo describa arcos de radio arbitrario cuando otro de sus puntos es obligado
a describir un arco de circunferencia adecuado. Su aplicación más extendida
consiste en hacer que un punto describa de forma exacta un segmento (no de
forma aproximada como en el paralelogramo de Watt, diseñado unos cien años
antes).
pág. 5
Cuando Lord Kelvin contempló el mecanismo, se dice que comentó que era la
cosa más bonita que no había visto nunca.
En realidad, el sistema hace que si un punto D describe una curva, otro punto
del mecanismo, el C, describe su curva inversa respecto a un punto O, con una
constante de inversión igual a a2-b2, siendo a,b las longitudes de los dos tipos
de barras utilizadas en la construcción del mecanismo. A continuación se
procede al análisis geométrico del mecanismo.
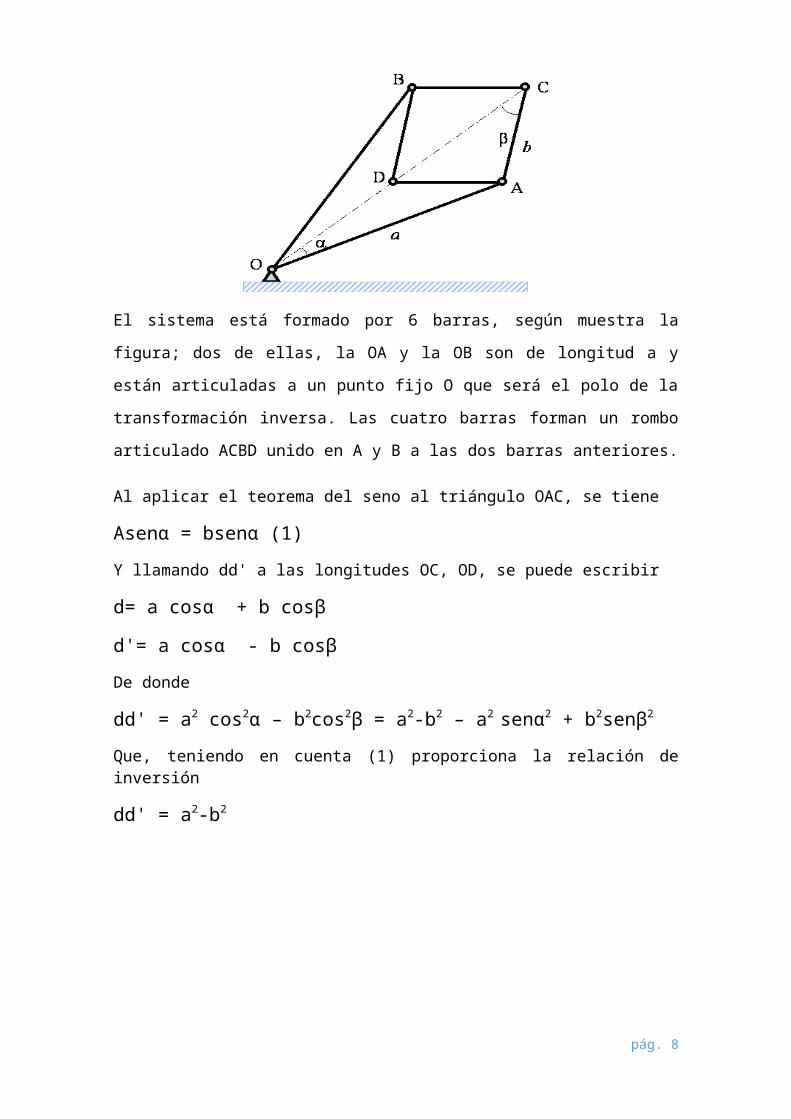
El sistema está formado por 6 barras, según muestra la figura; dos de ellas, la
OA y la OB son de longitud a y están articuladas a un punto fijo O que será el
polo de la transformación inversa. Las cuatro barras forman un rombo
articulado ACBD unido en A y B a las dos barras anteriores.
Al aplicar el teorema del seno al triángulo OAC, se tiene
Asenα = bsenα (1)
Y llamando dd' a las longitudes OC, OD, se puede escribir
d= a cosα + b cosβ
pág. 6

d'= a cosα - b cosβ
De donde
dd' = a2 cos2α – b2cos2β = a2-b2 – a2 senα2 + b2senβ2
Que, teniendo en cuenta (1) proporciona la relación de inversión
dd' = a2-b2
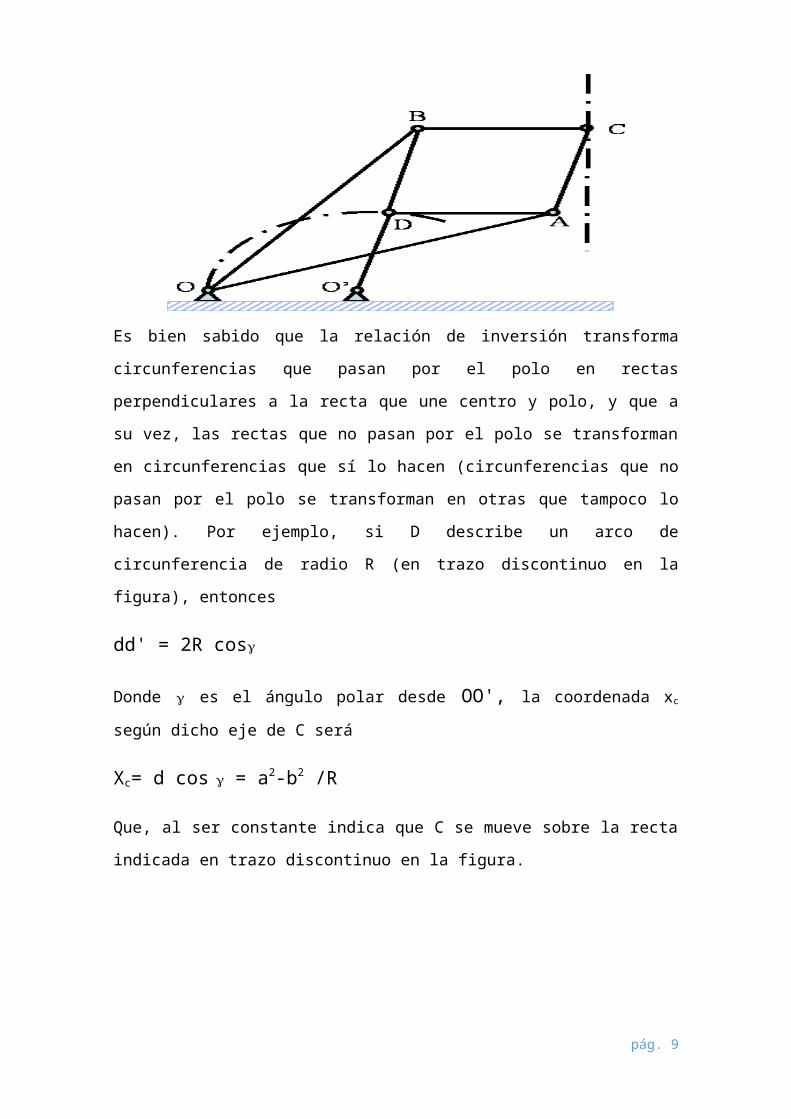
Es bien sabido que la relación de inversión transforma circunferencias que
pasan por el polo en rectas perpendiculares a la recta que une centro y polo, y
que a su vez, las rectas que no pasan por el polo se transforman en
circunferencias que sí lo hacen (circunferencias que no pasan por el polo se
transforman en otras que tampoco lo hacen). Por ejemplo, si D describe un
arco de circunferencia de radio R (en trazo discontinuo en la figura), entonces
dd' = 2R cos
Donde es el ángulo polar desde OO', la coordenada xc según dicho eje
de C será
Xc= d cos = a2-b2 /R
Que, al ser constante indica que C se mueve sobre la recta indicada en trazo
discontinuo en la figura.
pág. 7
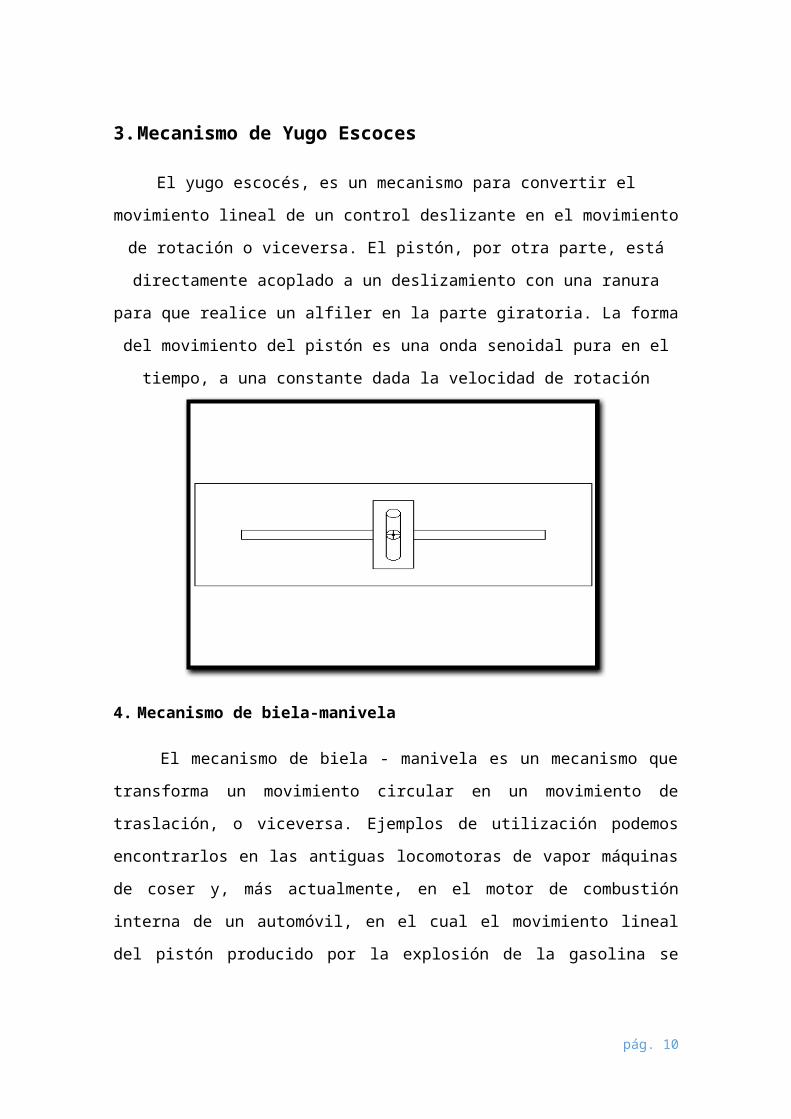
3.Mecanismo de Yugo Escoces
El yugo escocés, es un mecanismo para convertir el movimiento lineal de un
control deslizante en el movimiento de rotación o viceversa. El pistón, por otra
parte, está directamente acoplado a un deslizamiento con una ranura para que
realice un alfiler en la parte giratoria. La forma del movimiento del pistón es una
onda senoidal pura en el tiempo, a una constante dada la velocidad de rotación
4. Mecanismo de biela-manivela
El mecanismo de biela - manivela es un mecanismo que transforma un
movimiento circular en un movimiento de traslación, o viceversa. Ejemplos de
utilización podemos encontrarlos en las antiguas locomotoras de vapor
máquinas de coser y, más actualmente, en el motor de combustión interna de
un automóvil, en el cual el movimiento lineal del pistón producido por la
explosión de la gasolina se trasmite a la biela y se convierte en movimiento
circular en el cigüeñal.
Ambos sistemas (biela-manivela y excéntrica-biela) permiten convertir el
movimiento giratorio continuo de un eje en uno lineal alternativo en el pie de
la biela. También permite el proceso contrario: transformar un
movimiento lineal alternativo del pie de biela en uno en giratorio continuo en
el eje al que está conectada la excéntrica o la manivela (aunque para esto
pág. 8
tienen que introducirse ligeras modificaciones que permitan aumentar la inercia
de giro).
Este mecanismo es el punto de partida de los sistemas que aprovechan el
movimiento giratorio de un eje o de un árbol para obtener movimientos lineales
alternativos o angulares; pero también es imprescindible para lo contrario:
producir giros a partir de movimientos lineales alternativos u oscilantes.
En la realidad no se usan mecanismos que empleen solamente la manivela (o
la excéntrica) y la biela, pues la utilidad práctica exige añadirle algún operador
más como la palanca o el émbolo, siendo estas añadiduras las que permiten
funcionar correctamente a máquinas tan cotidianas como: motor de automóvil,
limpiaparabrisas, rueda de afilar, máquina de coser, compresor de pistón,
sierras automáticas.
El sistema biela-manivela emplea, básicamente, una manivela,
un soporte y una biela cuya cabeza se conecta con el eje
excéntrico de la manivela (empuñadura).
pág. 9
Para el sistema excéntrica-biela se sustituye la manivela por una excéntrica,
conectando la biela al eje excéntrico y siendo el resto del mecanismo
semejante al anterior.
Este sistema es totalmente reversible, pues se puede imprimir un movimiento
lineal alternativo al pie de biela y obtener uno giratorio en el eje de la manivela.
A la hora de diseñar estos mecanismos tenemos que tener en cuenta que:
pág. 10
La longitud del brazo de la manivela determina el movimiento del pie de la biela (carrera), por tanto, hemos de diseñar la manivela con longitud mucho más corta que la biela.
Para que el sistema funcione adecuadamente se deben emplear bielas cuya
longitud sea, al menos, 4 veces el radio de giro de la manivela a la que está
acoplada.
Cuando tenemos que transformar movimiento giratorio en alternativo, el eje
de la manivela es el elemento motriz y el pie de biela se conecta al
elemento resistente (potencia útil). Esto hace que la fuerza aplicada al eje
se reduzca en proporción inversa a la longitud de la manivela, por lo
que cuanto mayor sea la manivela menor será la fuerza que aparece en
su empuñadura y consecuentemente en el pie de la biela.
Las cabezas de las bielas deben de estar centradas en la empuñadura
sobre la que giran, por lo que puede ser necesario aumentar su anchura
(colocación de un casquillo).
¿Cómo fabricar el mecanismo biela-manivela?
Este mecanismo se puede construir en el taller de tecnología usando los
siguientes materiales:
Cartón, para las poleas.
Varilla roscada M4.
Tuercas y arandelas M4.
Casquillo metálico.
Listón de madera 18x9 mm.
Palito de barbacoa.
Contrachapado de 3 mm.
pág. 11
Carrera=2 veces el radio de la manivela

Contrachapado de 10 mm.
Tinte para madera.
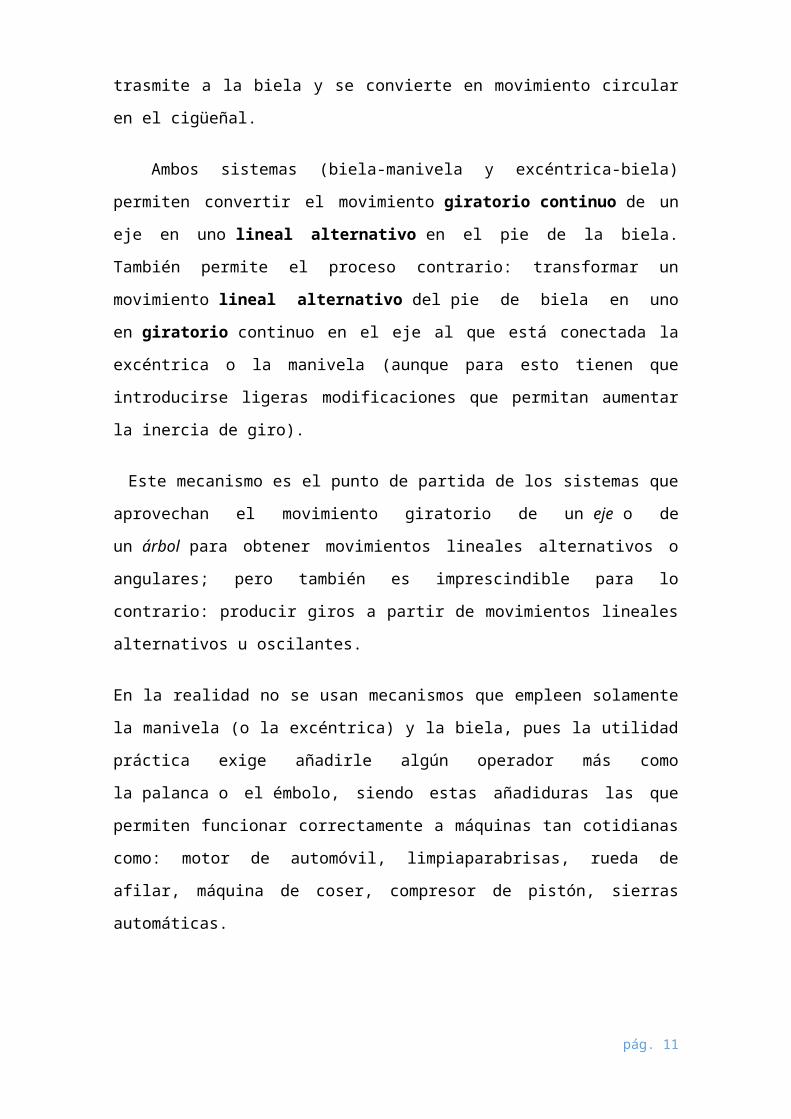
El resultado se puede observar en las siguientes imágenes:
Descripción de las piezas del mecanismo:
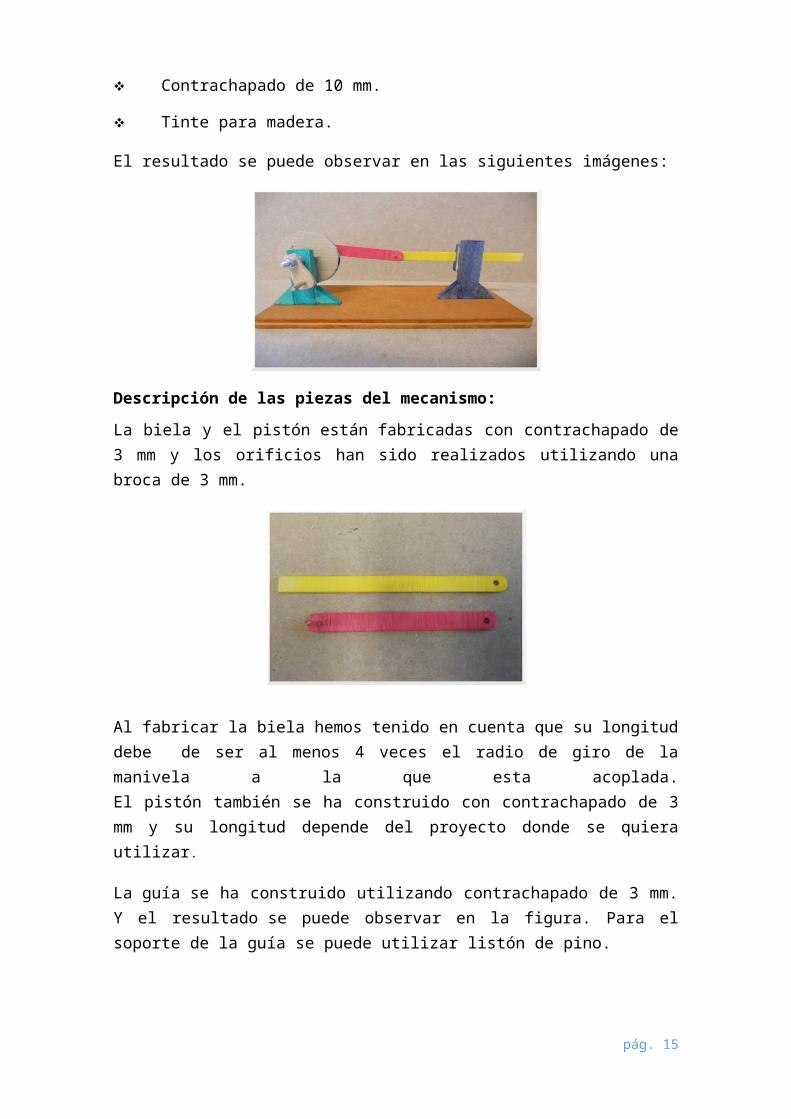
La biela y el pistón están fabricadas con contrachapado de 3 mm y los orificios han sido realizados utilizando una broca de 3 mm.
Al fabricar la biela hemos tenido en cuenta que su longitud debe de ser al menos 4 veces el radio de giro de la manivela a la que esta acoplada.El pistón también se ha construido con contrachapado de 3 mm y su longitud depende del proyecto donde se quiera utilizar.
La guía se ha construido utilizando contrachapado de 3 mm. Y el resultado se puede observar en la figura. Para el soporte de la guía se puede utilizar listón de pino.
pág. 12

La Excéntrica la hemos fabricado utilizando cartón, para el eje varilla roscada
M4, para el soporte listón de pino y para la manivela contrachapado de 5 mm.
APLICACIONES DE UN CONJUNTO BIELA MANIVELA
Las aplicaciones del conjunto biela manivela es variado a continuación
daremos a conocer algunas aplicaciones
Staker
El accionamiento eléctrico del mecanismo puede ser mediante moto variador o
controlado con inversor. El movimiento de empuje es completamente mecánico
y está generado por un mecanismo biela-manivela que actúa sobre la rotación
del cuadrilátero articulado que soporta la varilla de empuje, produciendo un
avance de tipo sinusoidal con arranque y detención lentos y sin choques, ideal
para no perjudicar la estabilidad de los recipientes. Un cilindro neumático,
accionado por un muelle neumático, que cumple la función de amortiguador
durante la bajada del vástago, levanta la cabeza de la carrera de retorno. El
stacker tiene un sistema de regulación en altura para un mejor uso de acuerdo
con el artículo que se ha de cargar. La modificación de la carrera se realiza
cambiando la longitud de la biela de empuje.
VERIFICACION DE AMORTIGUADORES
Dos tipos de máquinas diferentes, según el sistema de arrastre del vástago del
amortiguador. El movimiento se realiza mediante un mecanismo biela-
manivela movido por un motor eléctrico o el movimiento lo transmite un servo
cilindro hidráulico con una válvula proporcional, trabajando en lazo cerrado un
PID.En ambos casos, el cuerpo del amortiguador descansa en un soporte
donde se transmite la fuerza a una célula de carga extensa métrica. La señal
de desplazamiento proporcional a la carrera del vástago del amortiguador, la
emite un captador de desplazamiento asociado al cilindro hidráulico o un
encoger asociado al giro del mecanismo biela-manivela.
pág. 13

Ambas máquinas pueden utilizarse para verificación en línea de producción,
comparando los valores leídos de fuerza-desplazamiento con valores
previamente prefijados. Además es posible llevar una estadística de la
producción con los valores de aceptados, rechazados, medias, recorridas, etc.
EMPUJADOR DE BOTELLAS
Funcionamiento mecánico, asistido por un sistema electrónico, permitiendo
cadencias hasta 18 ciclos/minuto. Movimientos de avance y de deslizamiento
lateral suaves, efectuados por sistema biela-manivela combinad con un
sistema de variación de velocidad electrónico, permitiendo la alteración de la
velocidad de los diferentes segmentos durante el ciclo.
Deslizamiento de los movimientos sobre guías y rodamientos lineales.
Altura de elevación: hasta 500mm.
Anchura del rodillo de empujar: hasta 5500mm.
Potencia instalada: 9.5 kW, 380 V... 500 VAC, 50-60 Hz.
MAQUINA ENVASADORA
La máquina envasadora MH3, es una maquina horizontal tubular,
confeccionadora de bolsas de tres costuras tipo almohada y fondo fuelle, tanto
en polietileno como en materiales laminados este tipo de máquinas
horizontales son recomendadas para productos frágiles o que deban ir
acomodados en la bolsa, también permite trabajar con gran variedad de
productos. Consta de los siguientes elementos.
- Tracción del material de envoltura por medio de las mordazas de sellado,
dicho movimiento se recibe a través de una biela manivela y las mordazas se
encuentran montadas sobre rodamientos lineales.
- Sistema de foto centrado por medio de fibra óptica.
- En caso de materiales laminados, mordazas construidas en acero indeformable, con temperatura constante controladas electrónicamente.
- En caso de polietileno, mordazas de sellado por pulso controladas electrónicamente y refrigeradas por agua.
- Todos los elementos que se encuentran en contacto con el producto realizados en acero inoxidable.
- Comando de la envasadora por intermedio de un PLC, marca Allen Bradley.
pág. 14
- Movimiento principal de la envasadora realizado por un motor reductor libre de mantenimiento.
- Corte neumático por cuchilla dentada.
- Cubierta de acrílico de seguridad.
La máquina admite la incorporación de todo tipo de dosificadores para diferentes clases de productos.
Velocidad máxima de envasadora: 30 golpes/min.
Medidas máx. De la bolsa almohada: 220 mm x 350 mm
Medidas máx. En fondo cuadrado/fuelle: Fondo 140mm x 70mm de altura
Potencia eléctrica instalada: 3,5 kW
Consumo de aire: 50 litros/min.
a). Biela
Se trata de un elemento rígido y alargado que permite la unión articulada entre
la manivela y el émbolo. Se puede denominar biela a un elemento mecánico
que sometido a esfuerzos de tracción, compresión y flexión, transmite el
movimiento articulando a otras partes de la máquina. En un motor de
combustión interna conectan el pistón al cigüeñal. Actualmente las bielas son
un elemento básico en los motores de combustión interna y en los compresores
alternativos. Se diseñan con una forma específica para conectarse entre las
dos piezas, el pistón y el cigüeñal. Su sección transversal o perfil puede tener
forma de H, I o +.
Es una pieza de suma importancia, tanto para la transmisión de potencia,
como para la transformación del movimiento. Material de una biela: El material
del que se fabrican es de una aleación de acero, titanio o aluminio con un
tratamiento adecuado para obtener las elevadas características mecánicas que
se precisan.
. En la industria automotor todas se fabrican por forja, pero algunos fabricantes
de piezas las hacen mediante mecanizado. Es una especie de brazo que une al
cigüeñal con el pistón. Transmite el movimiento entre el cigüeñal y pistón, su
movimiento es muy similar a cuando pedaleamos en la bicicleta,
Como se fabrican: Son forjadas. O sea: a una temperatura muy elevada se le
da la forma y posteriormente se mecanizan las zonas que permiten el
movimiento
pág. 15

Condiciones: Las condiciones exigidas en la fabricación de las bielas para su correcto funcionamiento destacan:
Igualdad de peso para cada grupo de bielas de un mismo motor. Paralelismo entre ejes de simetría. Precisión en la longitud o distancia entre centros
b). Partes de una biela
Se pueden distinguir tres partes en una biela.
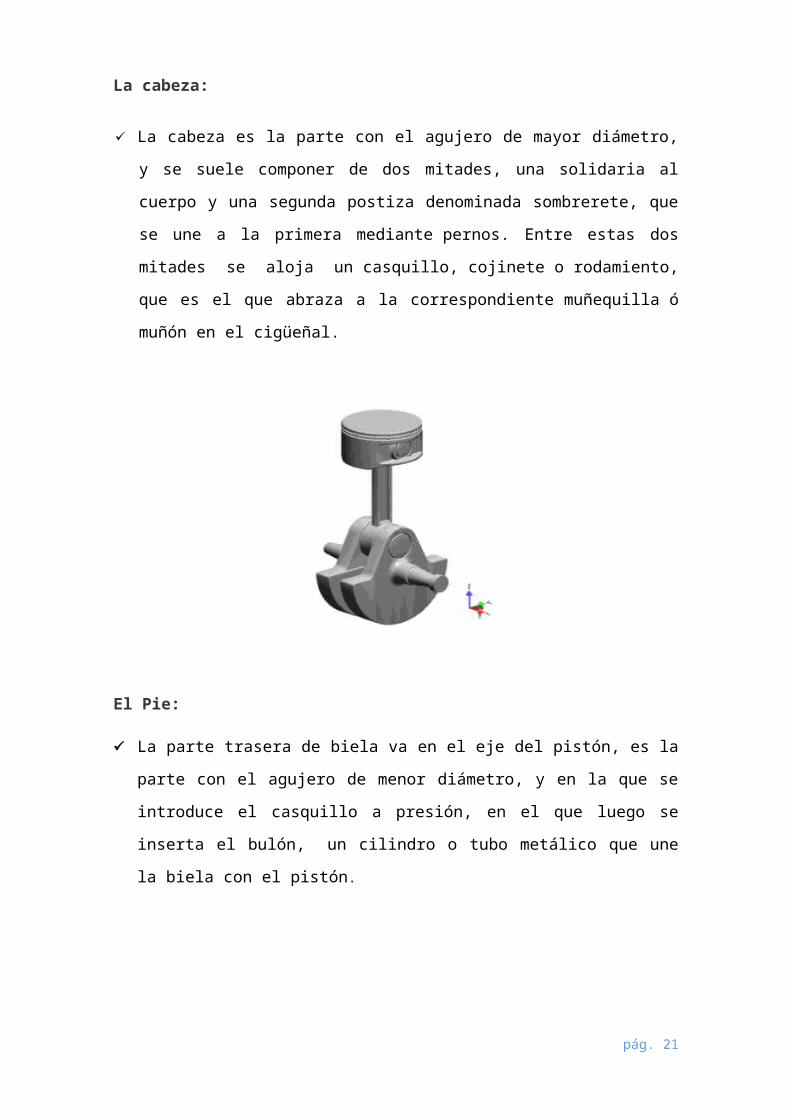
La cabeza:
La cabeza es la parte con el agujero de mayor diámetro, y se suele
componer de dos mitades, una solidaria al cuerpo y una segunda postiza
denominada sombrerete, que se une a la primera mediante pernos. Entre
estas dos mitades se aloja un casquillo, cojinete o rodamiento, que es el
que abraza a la correspondiente muñequilla ó muñón en el cigüeñal.
pág. 16

El Pie:
La parte trasera de biela va en el eje del pistón, es la parte con el agujero
de menor diámetro, y en la que se introduce el casquillo a presión, en el que
luego se inserta el bulón, un cilindro o tubo metálico que une la biela con
el pistón.
El cuerpo:
Es la parte central, está sometido a esfuerzos de tracción-compresión en su
eje longitudinal, y suele estar aligerado, presentando por lo general una
sección en forma de doble T, y en algunos casos de cruz.bh
c). Clases de bielas
En función de la forma de la cabeza de biela, y como se une a ella el
sombrerete, se pueden distinguir:
Biela enteriza:
Es aquella cuya cabeza de biela no es desmontable, no existe el sombrerete.
En esos casos el conjunto cigüeñal-bielas es indesmontable, o bien es
desmontable porque el cigüeñal se desmonta en las muñequillas.
Biela aligerada:
Si el ángulo que forma el plano que divide las dos mitades de la cabeza de
biela, no forma un ángulo recto con el plano medio de la biela, que pasa por los
ejes de pie y cabeza, sino que forma un ángulo, entonces se dice que la biela
es aligerada
pág. 17
Por lo general, las bielas de los motores alternativos de combustión interna se
realizan en acero templado mediante forja, aunque hay motores de competición
con bielas de titanio o aluminio, realizadas por operaciones de arranque de
material.
d). Funcionamiento de una biela en un motor de combustión interna
Diagrama de un motor de combustión interna. La letra R señala la biela
Cuando el pistón se encuentra comprimiendo la mezcla 10° antes para llegar
al punto muerto superior (PMS) la chispa se activa, provocando que la mezcla
comience quemarse y cuando llegue al PMS esta fuerza explosiva que se está
liberando se comprime. Debido a las fuerzas inerciales el mecanismo sigue
avanzando, al encontrarse a 10° después del PMS es cuando se libera toda la
fuerza.
Los principales esfuerzos que sufre la biela son de flexión compuesta en el
momento de la carga máxima al explotar la mezcla combustible (expansión del
ciclo), la compresión estaría dada por la componente de la fuerza sobre el eje
longitudinal de la biela, y la flexión por la componente transversal a la misma, y
lo mismo con el par reactivo proporcionado por la carga a través del cigüeñal al
pág. 18

oponerse al movimiento. Además la biela sufre un esfuerzo de compresión
nuevamente en la etapa de compresión de la mezcla.
Después de observar los distintos tipos de análisis realizados a la biela se
pueden notar dos puntos críticos que ocurren en diferentes etapas del ciclo
mecánico, el primero de ellos se aprecia durante la compresión, este tiene
lugar en la parte media de la biela, el segundo punto crítico se sitúa en la parte
inferior de la biela y ocurre durante la expansión del ciclo. Los tornillos, por su
parte, soportan solo un pequeño porcentaje de la carga.
Con un análisis similar en bielas de sección tipo H en lugar de I, se observa
que los esfuerzos que aparecen son menores, esto es debido a que las bielas
tipo H se fabrican en su mayoría mecanizadas y con una sección constante,
por lo que en la parte de la cabeza resulta sobredimensionada, disminuyendo
las tensiones internas, se utilizan en motores de altas exigencias. Sin embargo
en los automóviles de producción masiva se utilizan las bielas tipo I forjadas
que resisten apropiadamente los esfuerzos que sufren en un uso normal, pero
no son adecuadas para regímenes más intensos. En la figura siguiente
podemos apreciar cómo están distribuidas las bielas en un motor de cuatro
tiempos.
Funcionamiento de las bielas en un motor de 4 tiempos
pág. 19

Manivela: Es una palanca con un punto al eje de rotación y la otra en la cabeza
de la biela. Cuando la biela se mueve alternativamente, adelante y atrás, se
consigue hacer girar la manivela gracias al movimiento general de la biela. Y al
revés, cuando gira la manivela, se consigue mover alternativamente adelante y
atrás la biela y el émbolo.
En el Mecanismo podemos acceder a dos enlaces, en uno se nos muestra el
mecanismo biela manivela y en el segundo el conjunto anterior aplicado al
pistón de un motor. Como siempre, en los enlaces se nos describe el
mecanismo y se nos dan sus características y utilidades.
Partes de la Manivela
Se pueden distinguir en una Manivela: El Pistón, La Biela y el Eje.
Elementos fundamentales. Los elementos fundamentales de una biela son el
cabezal, que encaja al perno de la manivela del eje, el pie, que encaja al bulón
y la caña, elemento de unión del sistema. Los tipos de bielas son muy variados,
según la función que realizan; biela articulada (principal o maestra; permite la
articulación de bielas secundarias en los orificios de su cabezal); biela de
Acoplamiento (Mecánica)|acoplamiento (encargada de conectar el pistón con el
manubrio en las máquinas de vapor) biela deslizante (cuyo cabezal está
sustituido por un soporte curvo), etc. Existe un sistema que combina una biela,
una manivela y una corredera, empleado en las máquinas de vapor y muy
utilizado en el s.XIX, pero actualmente en desuso con la aparición de motores
rotativos muy especializados
Tipos de Manivela
De estructura rígida, articulada y doblemente articulada, por la forma de los
rodamientos en los puntos de apoyo pueden ser Planos (Bujes), Rodamiento
Esféricos o Bolas y rodamientos cilíndricos o rolletes
pág. 20
Construcción
Por lo general, las manivelas de los motores alternativos de combustión interna
se realizan en acero templado mediante forja, aunque hay aparatos que las
poseen de madera y otros materiales alternativos.
5. Mecanismos De 4 barras:
Un mecanismo de cuatro barras es un mecanismo formado por tres barras
móviles y una cuarta barra fija (por ejemplo, el suelo), unidas mediante nudos
articulados. Las barras móviles están unidas a la fija mediante pivotes.
Usualmente las barras se numeran de la siguiente manera: Barra 2. Barra que
proporciona movimiento al mecanismo. Barra 3. Barra superior. Barra 4. Barra
que recibe el movimiento. Barra 1. Barra imaginaria que vincula la unión de
revoluta de la barra 2 con la unión de revoluta de la barra 4 con el suelo.
Son mecanismos de manivela-balancín que produce 2 posiciones del balancín
con tiempos iguales para las carreras de avance y de retorno. Este se llama
mecanismo de retorno rápido y es un caso especial del caso general de retorno
rápido. La razón es por su estado de no retorno de posicionamiento del centro
de la manivela O2 en la cuerda de B1 B2 extendida. Esto hace que la manivela
describa ángulos iguales a 180º cuando impulsa al balancín de su extremo
(posición de agarrotamiento) al otro. Si la manivela gira a velocidad angulas
constante, como hace cuando es impulsada a 180º hacia adelante y hacia atrás
tomara el mismo tiempo.
pág. 21

Si el centro de la manivela O2 se encuentra fuera de la cuerda B1 B2
prolongada, entonces describirá los ángulos desiguales entre las posiciones de
agarrotamiento (definidas como colinealidad de la manivela y el
acoplador).Ángulos desiguales darán tiempos desiguales, cuando la manivela
gira a velocidad constante.
6.MECANISMOS DE 6 BARRAS:
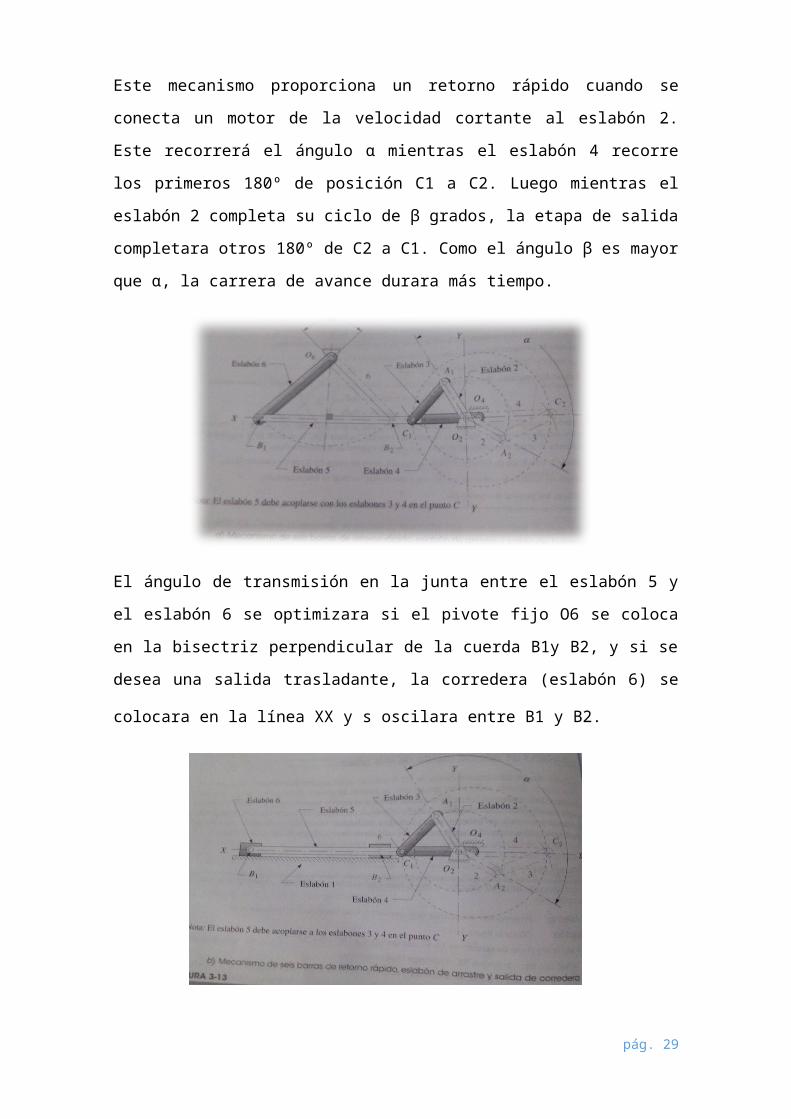
Este mecanismo proporciona un retorno rápido cuando se conecta un motor de
la velocidad cortante al eslabón 2. Este recorrerá el ángulo α mientras el
eslabón 4 recorre los primeros 180º de posición C1 a C2. Luego mientras el
eslabón 2 completa su ciclo de β grados, la etapa de salida completara otros
180º de C2 a C1. Como el ángulo β es mayor que α, la carrera de avance
durara más tiempo.
pág. 22

El ángulo de transmisión en la junta entre el eslabón 5 y el eslabón 6 se
optimizara si el pivote fijo O6 se coloca en la bisectriz perpendicular de la
cuerda B1y B2, y si se desea una salida trasladante, la corredera (eslabón 6)
se colocara en la línea XX y s oscilara entre B1 y B2.
7. MECANISMOS DE LÍNEA RECTA: Es un mecanismo que puede realizar
un movimiento rectilíneo cíclico existen dos tipos lo mecanismos de línea
recta exacta y los mecanismos de línea recta inexacta.
8.Mecanismos de línea recta de watt: inventado por James Watt (1736-
1819) en 1769. Es un mecanismo de línea recta aproximada, pero suficiente
para los requisitos de la época en los que no existían herramientas capaces
de producir rectitud con precisión. El mecanismo es de 4 barras y cuenta
con dos balancines articulados a la barra fija de igual longitud (O2-A es
igual a O4-B). El punto trazador está en el centro del acoplador
(barra AB).
pág. 23

9.Mecanismo de línea recta de Roberts: es un mecanismo de línea
recta atribuido a Roberts (1789-1864) que consiste en dos balancines de
igual longitud (o2-a es igual a o4-b) l articulados a la barra fija y un
acoplador con un punto trazador que dista de las articulaciones la misma
distancia (ap = bp = l) formando el acoplador un triángulo isósceles. Este
mecanismo consigue un tramo rectilíneo aproximado entre las
articulaciones a la barra fija (es decir, entre o2 y o4).
Mecanismo de línea recta de chebyshev:
Es un mecanismo de línea recta inventado por chebyshev (1821-
1894) capaz de generar una trayectoria con un tramo aproximadamente
rectilíneo. El mecanismo de línea recta de chebyshev posee
las siguientes proporciones: [o2-o4] = 2·ab; [o2-a] =
[o4-b] = 2.5·ab y p es el punto medio del segmento ab.
Mecanismo de línea recta de Hoekens:
Es un mecanismo de línea recta inventado por
Hoekens que genera una trayectoria con un
tramo aproximadamente rectilíneo.
pág. 24

Las proporciones de este mecanismo son
aproximadamente: AB = O4-B = 2.5 [O2-A];
[O2-O4]=2 [O2-A]
CARACTERISTICAS
En muchas operaciones industriales se requiere deslizar una herramienta
para realizar un trabajo. Para automatizar estas operaciones se suele emplear
un mecanismo que cuenta con una deslizadera en la que se fija la
herramienta que realiza el trabajo. Hay ocasiones en las que, por la
naturaleza de la operación, el trabajo se realiza solamente en un sentido del
movimiento. En estos casos resulta especialmente útil hacer que la
herramienta vuelva rápidamente a la posición inicial para realizar una nueva
pasada. Así, se busca un mecanismo cuyo eslabón final es una deslizadera
de manera que ésta posea un movimiento de avance relativamente lento
(cuando la herramienta trabaja) y un movimiento de retroceso relativamente
rápido (cuando la herramienta no trabaja).
Uno de los mecanismos más empleados es el que se muestra a continuación.
Conducido por una manivela que se mueve con velocidad angular constante
(generalmente por medio de un motor eléctrico), produce en la deslizadera un
movimiento lento de avance (hacia la izquierda) y rápido de retroceso (hacia
pág. 25

la derecha). Como la velocidad angular de la manivela es constante, el tiempo
de avance es proporcional al ángulo de manivela dedicado al avance, e
igualmente con el retroceso.
APLICACIONES
En muchas aplicaciones, los mecanismos se usan para realizar operaciones
repetitivas tales como: empujar piezas a lo largo de una línea de montaje;
sujetar piezas juntas mientras se sueldan; para doblar cajas de cartón en una
máquina de embalaje automatizada; en máquinas herramientas para producir
una carrera lenta de recorte y una carrera rápida de retorno; etc.
Resulta a menudo conveniente usar un motor de velocidad constante, y esto es lo
que llevó al análisis de la ley de Grashof. No obstante, también es preciso tomar en
cuenta los requerimientos de energía y tiempo. En estas operaciones repetitivas
existe por lo común una parte del ciclo en la que el mecanismo se somete a una
carga, llamada carrera de avance o de trabajo, y una parte del ciclo conocida como
carrera de retorno en la que el mecanismo no efectúa un trabajo sino que se limita a
devolverse para repetir la operación. Existen varios mecanismos de retorno rápido,
los cuales se describen a continuación.
CEPILLO DE CODO:
pág. 26

Es una máquina herramienta que se usa para maquinar una superficie
plana que puede encontrarse en posición horizontal, vertical o en ángulo.
Además se emplea para maquinar superficies irregulares y especiales que
serían difíciles producir en otras máquinas.
LIMPIAPARABRIZAS
pág. 27

Mecanismos Manivela-Biela balancín.
Es un dispositivo utilizado para barrer la lluvia y basura del parabrisas de un
vehículo o medio de locomoción.
La gran mayoría de los automóviles están provistos de limpiaparabrisas, a
menudo en cumplimiento de disposiciones legales. Existen limpiaparabrisas
en
automóviles, buses, tranvías, automóviles, locomotoras, aviones y barcos.
Algunos automóviles tienen un dispositivo parecido para limpiar
los focos delanteros.
MAQUINAS LIMADORAS.
pág. 28
La limadora mecánica es una máquina herramienta para el mecanizado de
piezas por arranque de viruta, mediante el movimiento lineal alternativo de la
herramienta o movimiento de corte. La mesa que sujeta la pieza a mecanizar
realiza un movimiento de avance transversal, que puede ser intermitente
para realizar determinados trabajos, como la generación de una superficie
plana o de ranuras equidistantes. Asimismo, también es posible desplazar
verticalmente la herramienta o la mesa, manual o automáticamente, para aumentar
la profundidad de pasada.
La limadora mecánica permite el mecanizado de piezas pequeñas y
medianas y, por su fácil manejo y bajo consumo energético, es preferible su
uso al de otras máquinas herramienta para la generación de superficies
planas de menos de 800 mm de longitud.
pág. 29

BLOBIOGRAFIA
http://www.mecapedia.uji.es/
mecanismo_de_linea_recta_de_Peaucellier.htm
https://prezi.com/_fgzopoq3cxc/copy-of-
mecanismos-de-linea-recta/
http://es.wikipedia.org/wiki/
Mecanismo_de_retorno_r%C3%A1pido
Diseño de maquinaria, Cuarta Edición,
Robert. L. Norton
pág. 30