mecanica vectorial para ingenieros dinamica 9th (bloques)
TRANSCRIPT


616 Cinemática de partículas 11.29 La aceleración debida a la gravedad a una altura y sobre la su-perficie de la Tierra puede expresarse como
a �
donde a y y se expresan en ft/s2 y pies, respectivamente. Utilice esta expresiónpara calcular la altura que alcanza un proyectil lanzado verticalmente haciaarriba desde la superficie terrestre si su velocidad inicial es a) 1 800 ft/s,b) 3 000 ft/s, c) 36 700 ft/s.
11.30 La aceleración debida a la gravedad de una partícula que caehacia la Tierra es a � �gR2/r2, donde r es la distancia desde el centro de la Tierra a la partícula, R es el radio terrestre y g es la aceleración de la gra-vedad en la superficie de la Tierra. Si R � 3 960 mi, calcule la velocidad deescape, esto es, la velocidad mínima con la cual una partícula debe proyec-tarse hacia arriba desde la superficie terrestre para no regresar a la Tierra.(Sugerencia: v � 0 para r � �.)
11.31 La velocidad de una partícula es v � v0[1 – sen(�t/T)]. Si se sabe que la partícula parte desde el origen con una velocidad inicial v0, determine a) su posición y su aceleración en t � 3T, b) su velocidad promediodurante el intervalo de t � 0 a t � T.
11.32 La velocidad de una corredera se define mediante la relación v � v�sen(wnt � � ). Si se denota la velocidad y la posición de la correderaen t � 0 con v0 y x0, respectivamente, y se sabe que el desplazamiento má-ximo de la corredera es 2x0, demuestre que a) v� � (v2
0 � x20�2
n)�2x0�n, b) elvalor máximo de la velocidad ocurre cuando x � x0[3 � (v0�x0�n)2]�2.
11.4. MOVIMIENTO RECTILÍNEO UNIFORME
El movimiento rectilíneo uniforme es un tipo de movimiento en línearecta que a menudo se encuentra en las aplicaciones prácticas. En estemovimiento, la aceleración a de una partícula es cero para todo valorde t. En consecuencia, la velocidad v es constante, y la ecuación (11.1)se transforma en
� v � constante
La coordenada de posición x se obtiene cuando se integra esta ecua-ción. Al denotar mediante x0 el valor inicial de x, se escribe
� x
x0
dx � v � t
0dt
x � x0 � vt
x � x0 � vt (11.5)
Esta ecuación puede utilizarse sólo si la velocidad de la partícula esconstante.
dx�dt
�32.2���[1 � (y�20.9 106)]2
Figura P11.29
Figura P11.30
P
y
R
P
r
bee76985_ch11.qxd 10/6/09 6:55 PM Página 616

11.5. MOVIMIENTO RECTILÍNEO UNIFORMEMENTEACELERADO
El movimiento rectilíneo uniformemente acelerado es otro tipo comúnde movimiento. En éste, la aceleración a de la partícula es constante, yla ecuación (11.2) se convierte en
�ddvt� � a � constante
La velocidad v de la partícula se obtiene al integrar esta ecuación:
�v
v0
dv � a � t
0dt
v � v0 � at
v � v0 � at (11.6)
donde v0 es la velocidad inicial. Al sustituir por v en (11.1), se escribe
�ddxt� � v0 � at
Al denotar mediante x0 el valor inicial de x e integrar, se tiene
� x
x0
dx � � t
0(v0 � at) dt
x � x0 � v0t � �12�at2
x � x0 � v0t � �12�at2 (11.7)
También se puede recurrir a la ecuación (11.4) y escribir
v�dd
vx� � a � constante
v dv � a dx
Al integrar ambos lados, se obtiene
�v
v0
v dv � a � x
x0
dx
�12�(v2 � v2
0) � a(x � x0)
v2 � v20 � 2a(x � x0) (11.8)
Las tres ecuaciones que se han deducido ofrecen relaciones útilesentre la coordenada de posición, la velocidad y el tiempo en el casodel movimiento uniformemente acelerado, al sustituir los valores apro-piados de a, v0 y x0. El origen O del eje x debe definirse primero y es-cogerse una dirección positiva a lo largo del eje; esta dirección se usarápara determinar los signos de a, v0 y x0. La ecuación (11.6) relacionav y t y debe utilizarse cuando se desee que el valor de v correspondaa un valor determinado de t, o de manera inversa. La ecuación (11.7)
61711.5. Movimiento rectilíneo uniformemente acelerado
bee76985_ch11.qxd 10/6/09 6:55 PM Página 617

618 Cinemática de partículas relaciona a x y t; la ecuación (11.8) relaciona a v y x. Una aplicaciónimportante del movimiento uniformemente acelerado es el movimientode un cuerpo en caída libre. La aceleración de un cuerpo en caída li-bre (usualmente denotada mediante g) es igual a 9.81 m/s2 o 32.2 ft/s2.
Es importante recordar que las tres ecuaciones anteriores puedenutilizarse sólo cuando se sabe que la aceleración de la partícula es cons-tante. Si la aceleración de la partícula es variable, su movimiento sedebe determinar a partir de las ecuaciones fundamentales (11.1) a(11.4) según los métodos señalados en la sección 11.3.
11.6. MOVIMIENTO DE VARIAS PARTÍCULAS
Cuando varias partículas se mueven de manera independiente a lolargo de la misma línea, es posible escribir ecuaciones de movimientoindependientes para cada partícula. Siempre que sea factible, el tiem-po debe registrarse a partir del mismo instante inicial para todas laspartículas, y es necesario medir los desplazamientos desde el mismoorigen y en la misma dirección. En otras palabras, deben usarse un soloreloj y una sola cinta métrica.
Movimiento relativo de dos partículas. Considere dos partícu-las A y B que se mueven a lo largo de la misma línea recta (figura 11.7).Si las coordenadas de posición xA y xB se miden desde el mismo ori-gen, la diferencia xB � xA define la coordenada de posición relativa deB con respecto a A y se denota por medio de xB�A. Se escribe
xB�A � xB � xA o xB � xA � xB�A (11.9)
De manera independiente de las posiciones de A y B con respecto alorigen, un signo positivo para xB�A significa que B está a la derecha deA, y un signo negativo indica que B se encuentra a la izquierda de A.
La razón de cambio xB�A se conoce como la velocidad relativa deB con respecto a A y se denota por medio de vB�A. Al diferenciar (11.9),se escribe
vB�A � vB � vA o vB � vA � vB�A (11.10)
Un signo positivo de vB�A significa que a partir de A se observa que Bse mueve en dirección positiva; un signo negativo indica, según seobserva, que ésta se mueve en dirección negativa.
La razón de cambio de vB�A se conoce como la aceleración relati-va de B con respecto a A y se denota mediante aB�A. Al diferenciar(11.10), se obtiene†
aB�A � aB � aA o aB � aA � aB�A (11.11)
Movimientos dependientes. Algunas veces, la posición de unapartícula dependerá de la posición de otra o de varias partículas. En ese
†Advierta que el producto de los subíndices A y B�A que se usa en el miembro izquierdode las ecuaciones (11.9), (11.10) y (11.11) es igual al subíndice B utilizado en el miembrodel lado izquierdo.
x xA
AO B
xB/A
xB
Figura 11.7
Fotografía 11.2 En esta grúa de embarcaderose utilizan múltiples cables y poleas.
bee76985_ch11.qxd 10/6/09 6:55 PM Página 618

caso se dice que los movimientos son dependientes. Por ejemplo, laposición del bloque B en la figura 11.8 depende de la posición del blo-que A. Puesto que la cuerda ACDEFG es de longitud constante, ypuesto que las longitudes de las porciones de cuerda CD y EF alre-dedor de las poleas permanecen constantes, se concluye que la suma delas longitudes de los segmentos AC, DE y FG es constante. Al observarque la longitud del segmento AC difiere de xA sólo por una constante yque, de manera similar, las longitudes de los segmentos DE y FG difieren de xB únicamente por una constante, se escribe
xA � 2xB � constante
la cual recibe el nombre de ecuación de ligadura. Puesto que sólo una de las dos coordenadas xA y xB pueden elegir-
se de manera arbitraria, se afirma que el sistema que se presenta en lafigura 11.8 tiene un grado de libertad. De la relación entre las coorde-nadas de posición xA y xB se deduce que xA presenta un incremento�xA, esto es, si el bloque A desciende una cantidad �xA, la coordenadaxB recibirá un incremento �xB � ��
12��xA. En otras palabras, el bloque
B ascenderá la mitad de la misma cantidad; lo anterior puede verificar-se con facilidad de modo directo de la figura 11.8.
En el caso de los tres bloques de la figura 11.9, se puede observarde nuevo que la longitud de la cuerda que pasa por las poleas es cons-tante y, en consecuencia, las coordenadas de posición de los tres blo-ques deben satisfacer la siguiente relación:
2xA � 2xB � xC � constante
Puesto que es posible elegir de manera arbitraria dos de las coordena-das, se afirma que el sistema que se muestra en la figura 11.9 tiene dosgrados de libertad.
Cuando la relación que existe entre las coordenadas de posición devarias partículas es lineal, se cumple una relación similar entre las velo-cidades y entre las aceleraciones de las partículas. En el caso de los blo-ques de la figura 11.9, por ejemplo, se diferencia dos veces la ecuaciónobtenida y se escribe
2�ddxtA� � 2�
ddxtB� � �
ddxtC� � 0 o 2vA � 2vB � vC � 0
2�ddvtA� � 2�
ddvtB� � �
ddvtC� � 0 o 2aA � 2aB � aC � 0
A
B
C xB
xC xA
xA
xB
A
B
C D
E F
G
Figura 11.8
Figura 11.9
61911.6. Movimiento de varias partículas
bee76985_ch11.qxd 10/6/09 6:55 PM Página 619

PROBLEMA RESUELTO 11.4
Una pelota se lanza verticalmente hacia arriba desde una altura de 12 metrosen el pozo de un elevador con una velocidad inicial de 18 m/s. En el mismoinstante un elevador de plataforma abierta pasa por el nivel de 5 m, movién-dose hacia arriba con una velocidad constante de 2 m/s. Determine a) cuán-do y dónde golpea al elevador, b) la velocidad relativa de la pelota con res-pecto al elevador cuando ésta lo golpea.
SOLUCIÓN
Movimiento de la pelota. Puesto que la pelota tiene una aceleraciónconstante, su movimiento es uniformemente acelerado. Al colocar el origende O del eje y a nivel del suelo, es decir su dirección positiva hacia arriba,encontramos que la posición inicial es y0 � �12 m, la velocidad inicial co-rresponde a v0 � �18 m/s, y la aceleración equivale a a � �9.81 m/s2. Sus-tituyendo estos valores en las ecuaciones para movimiento uniformementeacelerado, se escribe
vB � v0 � at vB � 18 � 9.81t (1)yB � y0 � v0t � �
12�at2 yB � 12 � 18t � 4.905t2 (2)
Movimiento del elevador. Puesto que el elevador tiene una veloci-dad constante, su movimiento es uniforme. Al ubicar el origen O en el niveldel suelo y elegir la dirección positiva hacia arriba, se observa que y0 � �5m y se escribe
vE � �2 m/s (3)yE � y0 � vE t yE � 5 � 2t (4)
La pelota golpea el elevador. Se usaron el mismo tiempo t y elmismo origen O al escribir las ecuaciones de movimiento tanto de la pelotacomo del elevador. Se observa en la figura que cuando la pelota golpea elelevador,
yE � yB (5)
Al sustituir para yE y yB en (2) y (4) en (5), se tiene
5 � 2t � 12 � 18t � 4.905t2
t � �0.39 s y t � 3.65 s
Sólo la raíz t � 3.65 s corresponde a un tiempo después de que se ha inicia-do el movimiento. Al sustituir este valor en (4), se obtiene
yE � 5 � 2(3.65) � 12.30 mElevación desde el suelo � 12.30 m
La velocidad relativa de la pelota con respecto al elevador es
vB�E � vB � vE � (18 � 9.81t) � 2 � 16 � 9.81t
Cuando la pelota golpea al elevador en el tiempo t � 3.65 s, se tiene
vB�E � 16 � 9.81(3.65) vB�E � �19.81 m/s
El signo negativo significa que desde el elevador se observa que la pelota semueve en el sentido negativo (hacia abajo).
620
t = t
t = 0
yBa = –9.81 m/s2
v0 = 18 m/s
vE = 2 m/s
y0 = 12 m
O
t = t
yE
y0 = 5 mO
yB yE
O
t = 0
bee76985_ch11.qxd 10/6/09 6:55 PM Página 620

PROBLEMA RESUELTO 11.5
El collarín A y el bloque B están conectados por medio de un cable que pasapor tres poleas C, D y E, como se indica. Las poleas C y E se mantienen fijas,en tanto que B está unida a un collarín que se jala hacia abajo con una velo-cidad constante de 3 in./s. En t � 0, el collarín A empieza a moverse haciaabajo desde la posición K con una aceleración constante y sin velocidad ini-cial. Si se sabe que la velocidad del collarín A es 12 in./s cuando éste pasa porel punto L, determine el cambio de la elevación, la velocidad y la aceleracióndel bloque B cuando el collarín A pasa por L.
SOLUCIÓN
Movimiento del collarín A. Se sitúa el origen O en la superficie ho-rizontal superior y se elige la dirección positiva hacia abajo. Se observa quecuando t � 0, el collarín A está en la posición K y (vA)0 � 0. Puesto que vA �12 in./s y xA � (xA)0 � 8 in., cuando el collarín pasa por L, se escribe
v2A � (vA)2
0 � 2aA[xA � (xA)0] (12)2 � 0 � 2aA(8)aA � 9 in./s2
El tiempo en el cual el collarín A alcance el punto L se obtiene al escribir
vA � (vA)0 � aAt 12 � 0 � 9t t � 1.333 s
Movimiento de la polea D. Recordando que la dirección positiva eshacia abajo, se escribe
aD � 0 vD � 3 in./s xD � (xD)0 � vDt � (xD)0 � 3t
Cuando el collarín A llega a L, en t � 1.333 s, se tiene
xD � (xD)0 � 3(1.333) � (xD)0 � 4
En consecuencia, xD � (xD)0 � 4 in.
Movimiento del bloque B. Hay que observar que la longitud totaldel cable ACDEB difiere de la cantidad (xA � 2xD � xB) sólo por una cons-tante. Puesto que la longitud del cable es constante durante el movimiento,esta cantidad también debe permanecer constante. De tal modo, conside-rando los tiempos t � 0 y t � 1.333 s, se escribe
xA � 2xD � xB � (xA)0 � 2(xD)0 � (xB)0 (1)[xA � (xA)0] � 2[xD � (xD)0] � [xB � (xB)0] � 0 (2)
Sin embargo, se sabe que xA � (xA)0 � 8 in. y xD � (xD)0 � 4 in.; al sustituirestos valores en (2), se obtiene
8 � 2(4) � [xB � (xB)0] � 0 xB � (xB)0 � �16 in.
De tal modo: El cambio en la elevación de B � 16 in.xAl diferenciar (1) dos veces, se obtienen ecuaciones que relacionan las velo-cidades y las aceleraciones de A, B y D. Al sustituir las velocidades y acele-raciones de A y D en t � 1.333 s, se tiene
vA � 2vD � vB � 0: 12 � 2(3) � vB � 0 vB � �18 in./s vB � 18 in./sx
aA � 2aD � aB � 0: 9 � 2(0) � aB � 0 aB � �9 in./s2 aB � 9 in./s2x
621
C E
K
L
A
B
D8 in.
A
O
L
K
C E
AB
D
D
8 in.
xAaA
(xA)0
xA xB
xD
vA = 12 in./s
O
(xD)0
xD
vD = 3 in./s
O
bee76985_ch11.qxd 10/6/09 6:55 PM Página 621

R E S O L U C I Ó N D E P R O B L E M A S E N F O R M A I N D E P E N D I E N T E
En esta lección se obtuvieron las ecuaciones que describen el movimiento rectilíneouniforme (velocidad constante) y el movimiento rectilíneo uniformemente acelerado(aceleración constante). También se presentó el concepto de movimiento relativo.Las ecuaciones para el movimiento relativo [ecuaciones (11.9) a (11.11)] pueden apli-carse a los movimientos independientes o dependientes de cualesquiera de las par-tículas que se mueven a lo largo de la misma recta.
A. Movimiento independiente de una o más partículas. La solución de pro-blemas de este tipo debe organizarse del modo siguiente:
1. Iniciar la solución listando la información proporcionada, elaborando un di-bujo del sistema y seleccionando el origen y la dirección positiva del eje de coorde-nadas [problema resuelto 11.4]. Siempre es ventaja tener una representación visualde problemas de este tipo.
2. Escribir las ecuaciones que describen los movimientos de las diversas par-tículas, así como aquellas que describen cómo se relacionan estos movimientos [ecua-ción (5) del problema resuelto 11.4].
3. Definir las condiciones iniciales, esto es, especifique el estado del sistema co-rrespondiente a t � 0. Esto es en especial importante si los movimientos de las par-tículas se inician en tiempos diferentes. En tales casos, es posible recurrir a cuales-quiera de los dos enfoques.
a) Sea t � 0 el tiempo cuando las partículas empiezan a moverse. Se debe de-terminar entonces la posición inicial x0 y la velocidad inicial v0 de cada una de lasdemás partículas.
b) Sea t � 0 el tiempo en el que empieza a moverse la primera partícula. En esecaso, en cada una de las ecuaciones que describen el movimiento de otra partícula,se reemplaza t por t � t0, donde t0 es el tiempo en el cual esa partícula específicaempieza a moverse. Es importante reconocer que las ecuaciones que se obtienen deesta manera sólo son válidas para t � t0.
622
bee76985_ch11.qxd 10/6/09 6:55 PM Página 622

B. Movimiento dependiente de dos o más partículas. En problemas de este tipolas partículas del sistema están conectadas entre sí, por lo general mediante cuerdaso cables. El método de solución de estos problemas es similar al del grupo de pro-blemas precedente, salvo que en este caso no será necesario describir las conexionesfísicas entre las partículas. En los siguientes problemas, la conexión la proporcionauno o más cables. Para cada cable se tendrán que escribir ecuaciones similares a lasúltimas tres ecuaciones de la sección 11.6. Se sugiere el siguiente procedimiento:
1. Hacer un bosquejo del sistema y seleccionar un sistema de coordenadas, in-dicando de manera clara el sentido positivo para cada uno de los ejes coordenados.Por ejemplo, en el problema resuelto 11.5 las longitudes se miden hacia abajo a par-tir del soporte horizontal superior. De tal modo, se concluye que estos desplaza-mientos, velocidades y aceleraciones, los cuales tienen valores positivos, están dirigi-dos hacia abajo.
2. Escribir la ecuación (de ligadura) que describe la represión impuesta porcada cable sobre el movimiento de las partículas implicadas. Al diferenciar dos vecesesta ecuación, se obtendrán las relaciones correspondientes entre velocidades y ace-leraciones.
3. Si varias direcciones de movimiento están implicadas, se debe seleccionarun eje de coordenadas y un sentido positivo para cada una de estas direcciones. Tam-bién se debe intentar ubicar los orígenes de sus ejes de coordenadas, de modo quelas ecuaciones de restricciones sean lo más simples posible. Por ejemplo, en el pro-blema resuelto 11.5 es más fácil definir las diversas coordenadas, midiéndolas haciaabajo desde el soporte superior, que hacerlo hacia arriba desde el soporte inferior.
Por último, se debe recordar que el método de análisis que se describe en estalección y las ecuaciones correspondientes únicamente pueden utilizarse para par-tículas que se mueven con movimiento rectilíneo uniforme o uniformemente acele-rado.
623
bee76985_ch11.qxd 10/6/09 6:55 PM Página 623

11.45 El automóvil A está estacionado en el carril con dirección alnorte de una autopista y el automóvil B viaja en el carril con dirección al sura una rapidez constante de 60 mi/h. En t � 0, A empieza a acelerar a unarazón constante aA, mientras que en t � 5 s, B empieza a frenar con una de-saceleración constante de magnitud aA/6. Si se sabe que cuando los auto-móviles pasan uno al lado del otro, x � 294 ft y vA � vB, determine a) laaceleración aA, b) el momento en que los vehículos pasan uno al lado delotro, c) la distancia entre los automóviles en t � 0.
11.46 Dos bloques A y B se colocan sobre un plano inclinado, como se muestra en la figura. En t � 0, A se proyecta hacia arriba sobre el plano con una velocidad inicial de 27 ft/s y B se suelta desde el reposo. Los bloquespasan uno junto al otro 1 s después, y B llega a la parte baja del plano inclinadocuando t � 3.4 s. Si se sabe que la máxima distancia que alcanza el bloque A desde la base del plano es de 21 ft y que las aceleraciones de A y B (debidasa la gravedad y la fricción) son constantes y están dirigidas hacia abajo sobre el plano inclinado, determine a) las aceleraciones de A y B, b) la distancia d,c) la rapidez de A cuando los bloques pasan uno junto al otro.
11.47 El bloque deslizante A se mueve hacia la izquierda con una ve-locidad constante de 6 m/s. Determine, a) la velocidad del bloque B, b) lavelocidad de la parte D del cable, c) la velocidad relativa de la porción C delcable con respecto a la porción D.
11.48 El bloque B inicia su movimiento desde el reposo y desciende con una aceleración constante. Si se sabe que después de que el bloque A seha movido 400 mm, su velocidad es de 4 m/s, determine a) las aceleracionesde A y B, b) la velocidad y el cambio en la posición del bloque B después de 2 s.
627Problemas
A B
(vB)0 = 60 mi /h(vA)0 = 0
x
d
Figura P11.45
Figura P11.46
A
B
(vA)0 = 27 ft /s
(vB)0 = 0
d
B
A
CD
Figura P11.47 y P11.48
bee76985_ch11.qxd 10/6/09 6:55 PM Página 627
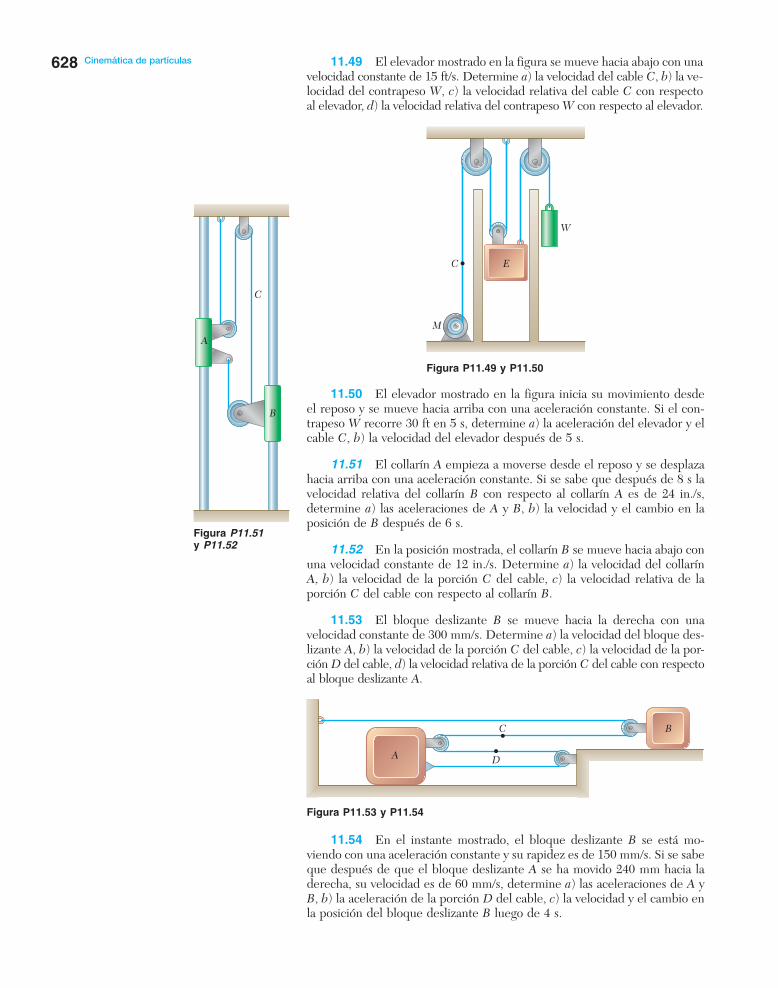
628 Cinemática de partículas 11.49 El elevador mostrado en la figura se mueve hacia abajo con unavelocidad constante de 15 ft/s. Determine a) la velocidad del cable C, b) la ve-locidad del contrapeso W, c) la velocidad relativa del cable C con respectoal elevador, d) la velocidad relativa del contrapeso W con respecto al elevador.
11.50 El elevador mostrado en la figura inicia su movimiento desdeel reposo y se mueve hacia arriba con una aceleración constante. Si el con-trapeso W recorre 30 ft en 5 s, determine a) la aceleración del elevador y elcable C, b) la velocidad del elevador después de 5 s.
11.51 El collarín A empieza a moverse desde el reposo y se desplazahacia arriba con una aceleración constante. Si se sabe que después de 8 s lavelocidad relativa del collarín B con respecto al collarín A es de 24 in./s, determine a) las aceleraciones de A y B, b) la velocidad y el cambio en laposición de B después de 6 s.
11.52 En la posición mostrada, el collarín B se mueve hacia abajo conuna velocidad constante de 12 in./s. Determine a) la velocidad del collarínA, b) la velocidad de la porción C del cable, c) la velocidad relativa de la porción C del cable con respecto al collarín B.
11.53 El bloque deslizante B se mueve hacia la derecha con una velocidad constante de 300 mm/s. Determine a) la velocidad del bloque des-lizante A, b) la velocidad de la porción C del cable, c) la velocidad de la por-ción D del cable, d) la velocidad relativa de la porción C del cable con respectoal bloque deslizante A.
11.54 En el instante mostrado, el bloque deslizante B se está mo-viendo con una aceleración constante y su rapidez es de 150 mm/s. Si se sabeque después de que el bloque deslizante A se ha movido 240 mm hacia laderecha, su velocidad es de 60 mm/s, determine a) las aceleraciones de A yB, b) la aceleración de la porción D del cable, c) la velocidad y el cambio enla posición del bloque deslizante B luego de 4 s.
W
EC
M
Figura P11.49 y P11.50
BC
DA
Figura P11.53 y P11.54
A
B
C
Figura P11.51y P11.52
bee76985_ch11.qxd 10/6/09 6:55 PM Página 628

11.56 El bloque B empieza a moverse desde el reposo, el bloque Ase mueve con una aceleración constante y el bloque deslizante C se desplazahacia la derecha con una aceleración constante de 75 mm/s2. Si se sabe queen t � 2 s las velocidades de B y C son 480 mm/s hacia abajo y 280 mm/shacia la derecha, respectivamente, determine a) las aceleraciones de A y B,b) las velocidades iniciales de A y C, c) el cambio en la posición del bloquedeslizante C después de 3 s.
11.57 El collarín A inicia su movimiento desde el reposo en t � 0 yse mueve hacia abajo con una aceleración constante de 7 in./s2. El collarín B se desplaza hacia arriba con una aceleración constante y su velocidad iniciales de 8 in./s. Si se sabe que el collarín B se mueve 20 in. entre t � 0 y t �2 s, determine a) las aceleraciones del collarín B y el bloque C, b) el tiempo en el cual la velocidad del bloque C es cero, c) la distancia que habrá recorridoel bloque C en ese tiempo.
11.58 Los collarines A y B inician su movimiento desde el reposo, elcollarín A se mueve hacia arriba con una aceleración de 3t2 in./s2. Si se sabeque el collarín B se mueve hacia abajo con una aceleración constante y quesu velocidad es de 8 in./s después de desplazarse 32 in., determine a) la aceleración del bloque C, b) la distancia que se habrá movido el bloque Cluego de 3 s.
11.59 El sistema mostrado inicia su movimiento desde el reposo ycada componente se mueve con una aceleración constante. Si la aceleraciónre-lativa del bloque C con respecto al collarín B es de 60 mm/s2 hacia arribay la aceleración relativa del bloque D con respecto al bloque A es de 110mm/s2 hacia abajo, determine a) la velocidad del bloque C después de 3 s,b) el cambio en la posición de bloque D luego de 5 s.
*11.60 El sistema mostrado inicia su movimiento desde el reposo y lalongitud del cordón superior se ajusta de manera que A, B y C se encuentreninicialmente al mismo nivel. Cada componente se mueve con una aceleraciónconstante y después de 2 s el cambio relativo en la posición del bloque Ccon respecto al bloque A es de 280 mm hacia arriba. Si se sabe que cuando la velocidad relativa del collarín B con respecto al bloque A es de 80 mm/s hacia abajo, los desplazamientos de A y B son, respectivamente, de 160 mm y de 320 mm hacia abajo, determine a) las aceleraciones de A y B si aB 10 mm/s2, b) el cambio en la posición del bloque D cuando la velocidad delbloque C es de 600 mm/s hacia arriba.
629Problemas11.55 El bloque B se mueve hacia abajo con una velocidad constante de20 mm/s. En t � 0, el bloque A se mueve hacia arriba con una aceleraciónconstante y su velocidad es de 30 mm/s. Si se sabe que en t � 3 s el bloquedeslizante C se ha movido 57 mm a la derecha, determine a) la velocidad del bloque deslizante C en t � 0, b) las aceleraciones de A y C, c) el cambioen la posición del bloque A después de 5 s.
BA
C
Figura P11.55 y P11.56
Figura P11.57 y P11.58
C
A
B
Figura P11.59 y P11.60
C
A
D
B
bee76985_ch11.qxd 10/6/09 6:55 PM Página 629