introducción al modelado de sistemas dinámicos
TRANSCRIPT
Capítulo 1
Introducción a los sistemas
dinámicos
Muchos sistemas dinámicos, independientemente de que sean mecánicos,eléctricos, térmicos, hidráulicos, neumáticos, químicos, económicos,biológicos, etc. se pueden caracterizar por ecuaciones diferenciales lascuales se obtienen con base en leyes físicas, como por ejemplo las leyes deKirchho¤, las leyes de Newton, etc.Se puede de�nir un modelo matemático como la descripción matemáticadel comportamiento del sistema. Muchas veces en el análisis de un sistema,inicialmente se obtiene un modelo matemático simple, como por ejemploignorando no linealidades y parámetros distribuidos (como en el caso delíneas de transmisión eléctrica), con el �n de obtener ecuaciones diferencialeslineales y de parámetros concentrados. Se debe tener en cuenta que a veceslos modelos son válidos en operaciones de baja frecuencia y no a frecuenciasmuy altas. Por ejemplo, al despreciar la masa de un resorte, su modelo esválido a bajas frecuencias. Para altas frecuencias, su masa debe ser tenida encuenta en el modelo.Los modelos matemáticos se pueden representar básicamente en dos formas:mediante un conjunto de ecuaciones diferenciales de primer orden, conocidascomo ecuaciones de estado o mediante una ecuación diferencial de n-ésimoorden. Sin embargo, esta última queda restringida a sistemas con una solaentrada y una sola salida. Las funciones o matrices de transferencia se puedenobtener a partir de las anteriores, aunque esto implica que el sistema es linealo ha sido linealizado.
1

2 Introducción a los sistemas dinámicos
1.1. Ecuaciones de estado
Las ecuaciones de estado o la ecuación (matricial) de estado la constituyeun conjunto de ecuaciones diferenciales de primer orden, que describecompletamente el comportamiento del sistema que se quiere modelar. Estemétodo de plantear el modelo matemático de un sistema es muy importanteporque puede ser aplicado a sistemas no lineales y sistemas multivariables.Entonces, si
x1 (t) ; x2 (t) ; :::; xn (t)
son las variables de estado (o los estados) del proceso en el tiempo t, y
u1 (t) ; u2 (t) ; :::; up (t)
son las entradas del proceso en el tiempo t, entonces el sistema puede serdescrito por n ecuaciones diferenciales de primer orden de la forma
_x1 (t) = a1 (x1 (t) ; x2 (t) ; :::; xn (t) ; u1 (t) ; u2 (t) ; :::; up (t) ; t)
_x2 (t) = a2 (x1 (t) ; x2 (t) ; :::; xn (t) ; u1 (t) ; u2 (t) ; :::; up (t) ; t)
... (1.1)
_xn (t) = an (x1 (t) ; x2 (t) ; :::; xn (t) ; u1 (t) ; u2 (t) ; :::; up (t) ; t)
Aqui se puede de�nir
x (t) ,
2
6
6
6
4
x1 (t)x2 (t)...
xn (t)
3
7
7
7
5
como el vector de estado del sistema, y
u (t) ,
2
6
6
6
4
u1 (t)u2 (t)...
up (t)
3
7
7
7
5
como el vector de entradas. Las ecuaciones de estado se pueden escribir deforma matricial como
_x (t) = a (x (t) ;u (t) ; t)
donde la de�nición de a se obtiene de la ecuación (1.1) y corresponde a unafunción vectorial no lineal
1.1 Ecuaciones de estado 3
1.1.1. De�nición de Estado de un Sistema
Cuando se hace referencia al estado de un sistema se debe tener en cuenta lasiguiente de�nición
De�nición 1.1 El estado de un sistema es un conjunto de cantidades
x1 (t) ; x2 (t) ; :::; xn (t) las cuales si se conocen en un tiempo t = t0 son
determinadas para t � t0 al especi�car las entradas del sistema para t � t0.
1.1.2. Clasi�cación de sistemas
Los sistemas se pueden describir por los términos lineal, no lineal, invariantecon el tiempo, y variante con el tiempo. La clasi�cación de los sistemas sepuede hacer de acuerdo a la forma de sus ecuaciones de estado. Por ejemplo,si un sistema es no lineal y variante con el tiempo, las ecuaciones de estadose pueden escribir como
_x (t) = a (x (t) ;u (t) ; t) (1.2)
Si el sistema es no lineal e invariante con el tiempo las ecuaciones de estadoson de la forma
_x (t) = a (x (t) ;u (t)) (1.3)
Si el sistema es lineal y variante con el tiempo sus ecuaciones de estado son
_x (t) = A (t)x (t) +B (t)u (t) (1.4)
dondeA (t) yB (t) son matrices de dimensiones n�n y n�p respectivamentecon elementos variantes en el tiempo. Las ecuaciones de estado para unsistema lineal e invariante con el tiempo son de la forma
_x (t) = Ax (t) +Bu (t) (1.5)
donde A y B son matrices constantes.
1.1.3. Ecuaciones de salida
Las cantidades físicas que pueden ser medidas son llamadas salidas delsistema y se denotan como y1 (t) ; y2 (t) ; :::; yq (t). Si las salidas del sistema

4 Introducción a los sistemas dinámicos
son funciones no lineales y variantes con el tiempo de las variables de estadoy las entradas, las ecuaciones de salida del sistema se pueden escribir como
y (t) = c (x (t) ;u (t) ; t) (1.6)
donde c es una función vectorial no lineal. Si la salida del sistema estarelacionada con los estados y las entradas de una forma lineal e invariantecon el tiempo, entonces la ecuación de salida se puede escribir como
y (t) = Cx (t) +Du (t) (1.7)
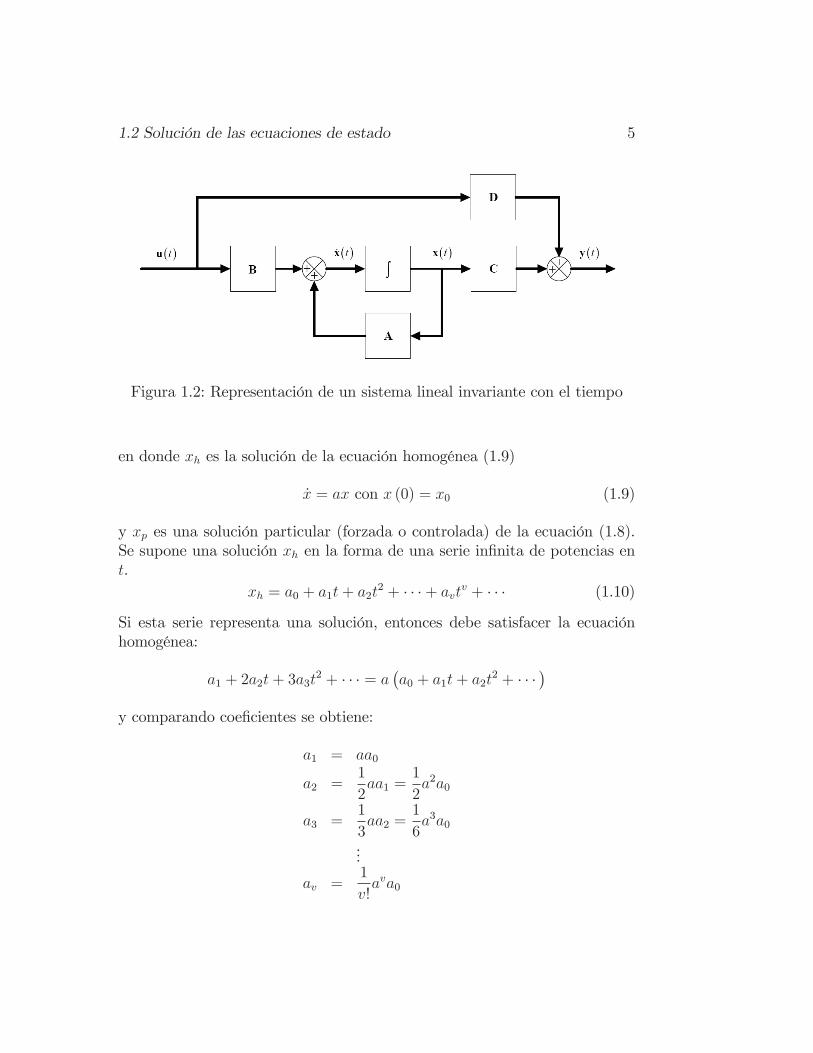
donde C y D son matrices de dimensiones q�n y q� p respectivamente conelementos constantes. La representación esquemática de un sistema no linealy de un sistema lineal, invariantes con el tiempo se muestran en las �guras1.1 y 1.2 respectivamente.
Figura 1.1: Representación de un sistema no lineal y variante con el tiempo
1.2. Solución de las ecuaciones de estado
1.2.1. Solución en términos de la matriz exponencial
La solución de la ecuación escalar (1.8)
_x = ax+ bu con x (0) = x0 (1.8)
se puede escribir como:x = xh + xp
1.2 Solución de las ecuaciones de estado 5
Figura 1.2: Representación de un sistema lineal invariante con el tiempo
en donde xh es la solución de la ecuación homogénea (1.9)
_x = ax con x (0) = x0 (1.9)
y xp es una solución particular (forzada o controlada) de la ecuación (1.8).Se supone una solución xh en la forma de una serie in�nita de potencias ent.
xh = a0 + a1t+ a2t2 + � � �+ avt
v + � � � (1.10)
Si esta serie representa una solución, entonces debe satisfacer la ecuaciónhomogénea:
a1 + 2a2t+ 3a3t2 + � � � = a
�
a0 + a1t+ a2t2 + � � �
�
y comparando coe�cientes se obtiene:
a1 = aa0
a2 =1
2aa1 =
1
2a2a0
a3 =1
3aa2 =
1
6a3a0
...
av =1
v!ava0

6 Introducción a los sistemas dinámicos
Como para t = 0, xh = x0 = a0, la solución homogénea es:
xh =
�
1 + at+1
2!a2t2 + � � �+
1
v!avtv + � � �
�
x0 (1.11)
La serie in�nita de potencias entre paréntesis se de�ne como la exponencialescalar eat. Entonces:
xh = eatx0 (1.12)
Por cualquiera de los métodos clásicos se puede encontrar la soluciónparticular:
xp = eat
Z t
0
e�a�bu (�) d� =
Z t
0
ea(t��)bu (�) d� (1.13)
y la solución total de (1.8) es entonces:
x (t) = eatx0 + eat
Z t
0
e�a�bu (�) d� (1.14)
x (t) = eatx0 +
Z t
0
ea(t��)bu (�) d� (1.15)
Por analogía con el caso escalar se obtendrá la solución homogénea delsistema:
_x = Ax, x (0) = x0 (1.16)
Se supone una solución en la forma de un vector en series de potencias en t:
x = a0 + a1t+ a2t2 + � � �+ avtv + � � � (1.17)
con (1.17) en (1.16) se obtiene:
a1 + 2a2t2 + 3a3t
3 + � � � = A�
a0 + a1t+ a2t2 + � � �
�
Por lo tanto:
a1 = Aa0
a2 =1
2Aa1 =
1
2A2a0
...
av =1
v!Ava0

1.2 Solución de las ecuaciones de estado 7
Puesto que para t = 0, x (0) = x0 = a0, la solución homogénea es:
x =
�
I+At+1
2!A2t2 + � � �+
1
v!Avtv + � � �
�
x0 (1.18)
La expresión dentro de paréntesis es una matriz n�n y debido a su similitudcon la serie in�nita de potencias para un exponencial escalar, se le denominamatriz exponencial y se denota con el símbolo eAt, es decir:
eAt , I+At+1
2!A2t2 + � � �+
1
v!Avtv + � � � (1.19)
Se puede demostrar que esta serie matricial (así como la escalar) convergeabsoluta y uniformemente para todo t �nito.La solución homogénea de (1.16) en forma compacta es:
x (t) = eAtx0 (1.20)
La matriz exponencial también se conoce como la matriz de transición omatriz fundamental y a menudo se simboliza por � (t). Puesto que eAt esuna matriz de n�n, la expresión (1.20) es una transformación lineal a travésde la cual el estado inicial x0 es transformado en el estado actual x (t).Las siguientes son algunas de las características de la matriz exponencial:
1. ddt
�
eAt�
= AeAt = eAtA
2. eA(t1+t2) = eAt1eAt2 = eAt2eAt1
3. eAte�At = I
es decir la inversa de eAt se calcula simplemente reemplazando t pot �t en(1.19).Una interesante propiedad de la solución homogénea (1.20) es la siguiente:considérese un proceso lineal en el cual en los instantes t = 0, t = t1 y t = t2,los estados son x0, x1 y x2, respectivamente. De (1.20) se tiene:
x1 = eAt1x0
x2 = eAt2x0
De las características de la matriz exponencial y de esta última ecuación setiene:
x2 = eA(t2�t1)eAt1x0 = e
A(t2�t1)x1

8 Introducción a los sistemas dinámicos
Es decir, el estado del sistema en cualquier tiempo t2 se puede obtener poruna transformación del estado en cualquier otro tiempo t1 usando la matrizexponencial como una matriz de transformación.
Ejemplo 1.1 Considérese un sistema con:�
_x1_x2
�
=
�
1 01 1
� �
x1x2
�
con x (0_) =
�
11
�
de (1.19) se obtiene:
eAt =
�
1 + t+ 0:5t2 + � � � 0t+ t2 + � � � 1 + t+ 0:5t2 + � � �
�
y por tanto�
x1x2
�
=
�
1 + t+ 0:5t2 + � � �1 + 2t+ 1:5t2 + � � �
�
La solución para cada componente de x se obtiene truncando la serie depotencias en t correspondiente. Nótese que la solución se caracteriza por unincremento en la precisión para valores pequeños de t. Si se requiere unabuena solución en el rango 0 < t < tf es necesario incluir un gran númerode términos. Entre mayor el intervalo tf , mayor será el número de términosnecesarios. En los computadores digitales para truncar el cálculo de eAt de(1.19) se mantiene un continuo chequeo del residuo R (m; t):
eAt = I+At+1
2!A2t2 + � � �+
1
m!Amtm +R (m; t)
El cálculo de eAt se obtiene cuando la norma de la matrizR (m; t), kR (m; t)k,alcanza un mínimo.Para propósitos de cálculo se acostumbra de�nir la norma de una matriz, lacual es un escalar que mide la magnitud absoluta de todos los n2 elementosde una matriz P de dimensiones n� n.Sea
2
6
4
p11 � � � p1n...
. . ....
pn1 � � � pnn
3
7
5
Una norma de P puede ser:
kPk =
nX
i;j=1
p2ij (1.21)

1.2 Solución de las ecuaciones de estado 9
Ejemplo 1.2 Considérese un sistema con:
�
_x1_x2
�
=
�
1 01 1
� �
x1x2
�
con x (0) =
�
11
�
La solución se puede obtener usando el software MatlabTM como sigue:
syms t
A=[1 0;1 1];
x0=[1;1];
x=expm(A*t)*x0;
simplify(x)
Obteniendo como solución
�
x1x2
�
=
�
et
et (t+ 1)
�
Se procederá ahora a buscar la solución completa de (1.5), también conocidacomo la ecuación transición de estado.Análoga a la solución escalar se intentará la siguiente solución:
x (t) = eAtx0 + eAt
Z t
0
e�A�Bu (�) d� (1.22)
x (t) = eAtx0 +
Z t
0
eA(t��)Bu (�) d� (1.23)
Se debe probar entonces que (1.23):
1. Satisface la ecuación diferencial (1.5)
2. Se reduce a x0 para t = 0.
Haciendo t! 0 se satisface la última condición:
l��mt!0
x (t) = Ix0 + I0 = x0

10 Introducción a los sistemas dinámicos
Para probar la primer condición se deriva (1.23) con respecto a t:
_x (t) = AeAtx0 + eAte�At Bu (t) +AeAt
Z t
0
e�A�Bu (�) d�
_x (t) = AeAtx0 + IBu (t) +AeAt
Z t
0
e�A�Bu (�) d�
_x (t) = A
�
eAtx0 + eAt
Z t
0
e�A�Bu (�) d�
�
+Bu (t)
_x (t) = Ax (t) +Bu (t)
Esto completa la prueba.
Ejemplo 1.3 Sea el sistema�
_x1_x2
�
=
�
1 01 1
� �
x1x2
�
+
�
11
�
u (t) con x (0) =
�
11
�
y u (t) un escalón unitario de�nido por:
u (t) =
�
1, t > 00, t < 0
Del ejemplo anterior se tiene:
e�At =
�
1� t+ 0:5t2 � � � � 0�t+ t2 � � � � 1� t+ 0:5t2 � � � �
�
entonces
e�A�Bu (�) =
�
1� � + 0:5� 2 � � � �1� 2� + 1:5� 2 � � � �
�
Z t
0
e�A�Bu (�) d� =
�
t� 12t2 + 1
6t3 � � �
t� t2 + 12t3 � � � �
�
De (1.23) se tiene:
x (t) = eAt�
x0 +
Z t
0
e�A�Bu (�) d�
�
Por lo tanto:
x (t) = eAt�
1 + t� 12t2 + 1
6t3 � � �
1 + t� t2 + 12t3 � � � �
�
=
�
1 + 2t+ t2 + � � �1 + 3t+ 2:5t2 + � � �
�

1.2 Solución de las ecuaciones de estado 11
Ejemplo 1.4 Sea el sistema�
_x1_x2
�
=
�
1 01 1
� �
x1x2
�
+
�
11
�
u (t) con x (0) =
�
11
�
y u (t) un escalón unitario de�nido por:
u (t) =
�
1, t � 00, t < 0
La solución se puede obtener usando el software MatlabTM como sigue:
syms t tau
A=[1 0;1 1];
B=[1;1];
x0=[1;1];
u=1;
x=expm(A*t)*x0+int(expm(A*(t-tau))*B*u,tau,0,t);
simplify(x)
Obteniendo como solución
�
x1x2
�
=
�
2et � 1et (2t+ 1)
�
La ecuación de transición de estado (1.23) es útil solo cuando el tiempo inicialse de�ne en t = 0. A menudo se desea separar un proceso de transición deestados en una sucesión de transiciones, y por lo tanto se debe escoger untiempo inicial más �exible. Sea este t0 con su correspondiente estado inicialx (t0) y supóngase que la entrada u (t) se aplica para t � 0.Evaluando (1.23) en t = t0 y resolviendo para x (0) se tiene:
x (0) = e�At0x (t0)� e�At0
Z t0
0
eA(t0��)Bu (�) d� (1.24)
Con (1.24) en (1.23):
x (t) = eAte�At0x (t0)� eAte�At0
Z t0
0
eA(t0��)Bu (�) d� +
Z t
0
eA(t��)Bu (�) d�
= eA(t�t0)x (t0) + eA(t�t0)
Z 0
t0
eA(t0��)Bu (�) d� +
Z t
0
eA(t��)Bu (�) d�
= eA(t�t0)x (t0) +
Z 0
t0
eA(t0��)Bu (�) d� +
Z t
0
eA(t��)Bu (�) d�

12 Introducción a los sistemas dinámicos
Entonces:
x (t) = eA(t�t0)x (t0) +
Z t
t0
eA(t0��)Bu (�) d� (1.25)
Nótese que (1.25) se reduce a (1.23) para t0 = 0.
1.2.2. Solución por medio de la trasformada de Laplace
La gran popularidad de la transformada de Laplace depende de su habilidadpara transformar cierta clase de ecuaciones diferenciales en ecuacionesalgebraicas y la facilidad para el manejo de las condiciones iniciales.Transformando ambos miembros de (1.5) se tiene:
sX (s)� x0 = AX (s) +BU (s) (1.26)
sX (s)�AX (s) = x0 +BU (s)
(sI�A)X (s) = x0 +BU (s)
X (s) = (sI�A)�1 x0 + (sI�A)�1BU (s) (1.27)
donde x0 = x (0). Si la ecuación de salida es:
y = Cx+Du (1.28)
transformando (1.28) y reemplazando (1.27) en ella se obtiene:
Y (s) = C (sI�A)�1 x0 +�
C (sI�A)�1B+D�
U (s) (1.29)
Si se supone el estado inicial nulo x0 = 0, se de�ne la matriz de transferenciaH (s) aquella que relaciona la transformada de Laplace de la respuesta Y (s)con la transformada de Laplace de la excitación U (s), así
Y (s) = H (s)U (s) (1.30)
dondeH (s) = C (sI�A)�1B+D (1.31)
de forma que2
6
6
6
4
Y1 (s)Y2 (s)...
Yq (s)
3
7
7
7
5
=
2
6
6
6
4
H11 (s) H12 (s) � � � H1p (s)H21 (s) H22 (s) � � � H2p (s)...
.... . .
...Hq1 (s) Hq2 (s) � � � Hqp (s)
3
7
7
7
5
2
6
6
6
4
U1 (s)U2 (s)...
Up (s)
3
7
7
7
5
(1.32)

1.2 Solución de las ecuaciones de estado 13
donde Hjk corresponde a la función de transferencia que relaciona la entradaUk con la salida Yj.El vector de estado x (t) se obtiene por la transformación inversa de (1.27)
x (t) = L�1 fX (s)g
= L�1�
(sI�A)�1 x0 + (sI�A)�1BU (s)
= L�1�
(sI�A)�1
x0 + L�1�
(sI�A)�1BU (s)
De donde se obtiene una nueva representación para la matriz exponencial:
eAt = L�1�
(sI�A)�1
(1.33)
Nótese que (1.33) suministra una expresión explícita para la matriz detransición.
Ejemplo 1.5 Considérese el ejemplo 1.3, en donde
A =
�
1 01 1
�
Por lo tanto,
(sI�A)�1 =adj (sI�A)
det (sI�A)=
1
(s� 1)2
�
s� 1 01 s� 1
�
=
"
1s�1
01
(s�1)21s�1
#
y de (1.33):
eAt =
�
et 0tet et
�
Si se supone el mismo estado inicial
x0 =
�
11
�
se obtiene la solución explícita para x (t):
x (t) = eAtx0 =
�
et
et (t+ 1)
�
14 Introducción a los sistemas dinámicos
1.3. Ejemplos introductorios a los sistemas
lineales
1.3.1. Circuitos eléctricos
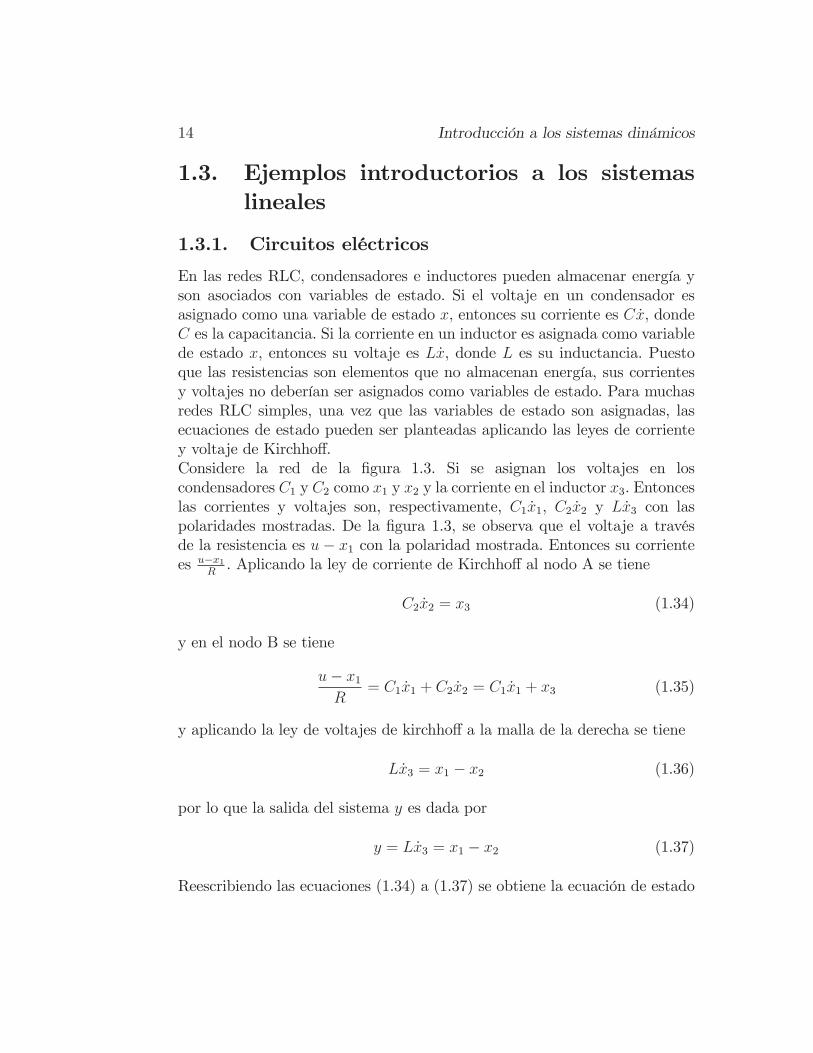
En las redes RLC, condensadores e inductores pueden almacenar energía yson asociados con variables de estado. Si el voltaje en un condensador esasignado como una variable de estado x, entonces su corriente es C _x, dondeC es la capacitancia. Si la corriente en un inductor es asignada como variablede estado x, entonces su voltaje es L _x, donde L es su inductancia. Puestoque las resistencias son elementos que no almacenan energía, sus corrientesy voltajes no deberían ser asignados como variables de estado. Para muchasredes RLC simples, una vez que las variables de estado son asignadas, lasecuaciones de estado pueden ser planteadas aplicando las leyes de corrientey voltaje de Kirchho¤.Considere la red de la �gura 1.3. Si se asignan los voltajes en loscondensadores C1 y C2 como x1 y x2 y la corriente en el inductor x3. Entonceslas corrientes y voltajes son, respectivamente, C1 _x1, C2 _x2 y L _x3 con laspolaridades mostradas. De la �gura 1.3, se observa que el voltaje a travésde la resistencia es u� x1 con la polaridad mostrada. Entonces su corrientees u�x1
R. Aplicando la ley de corriente de Kirchho¤ al nodo A se tiene
C2 _x2 = x3 (1.34)
y en el nodo B se tiene
u� x1R
= C1 _x1 + C2 _x2 = C1 _x1 + x3 (1.35)
y aplicando la ley de voltajes de kirchho¤ a la malla de la derecha se tiene
L _x3 = x1 � x2 (1.36)
por lo que la salida del sistema y es dada por
y = L _x3 = x1 � x2 (1.37)
Reescribiendo las ecuaciones (1.34) a (1.37) se obtiene la ecuación de estado

1.3 Ejemplos introductorios a los sistemas lineales 15
Figura 1.3: Circuito eléctrico
y de salida de las ecuaciones (1.38) y (1.39)
2
4
_x1_x2_x3
3
5 =
2
4
� 1RC1
0 � 1C1
0 0 1C2
1L
� 1L
0
3
5
2
4
x1x2x3
3
5+
2
4
1RC1
00
3
5u (1.38)
y =�
1 �1 0�
2
4
x1x2x3
3
5 (1.39)
Usando el software MatlabTM se puede obtener la solución numérica de la
ecuación (1.38). Sean u (t) =
�
sin (t) ; t � 00; t < 0
, R = 10k, L = 10mH, C1 =
C2 = 10�F , x (0) =
2
4
100
3
5, se obtiene
R=10e3;
L=10e-3;
C1=10e-6;
C2=C1;
A=[-1/(R*C1) 0 -1/C1;0 0 1/C2; 1/L -1/L 0];
B=[1/(R*C1);0;0];
C=[1 -1 0];
x0=[1;0;0];
t = 0:0.01:5;
u=sin(t);
sys=ss(A,B,C,0);
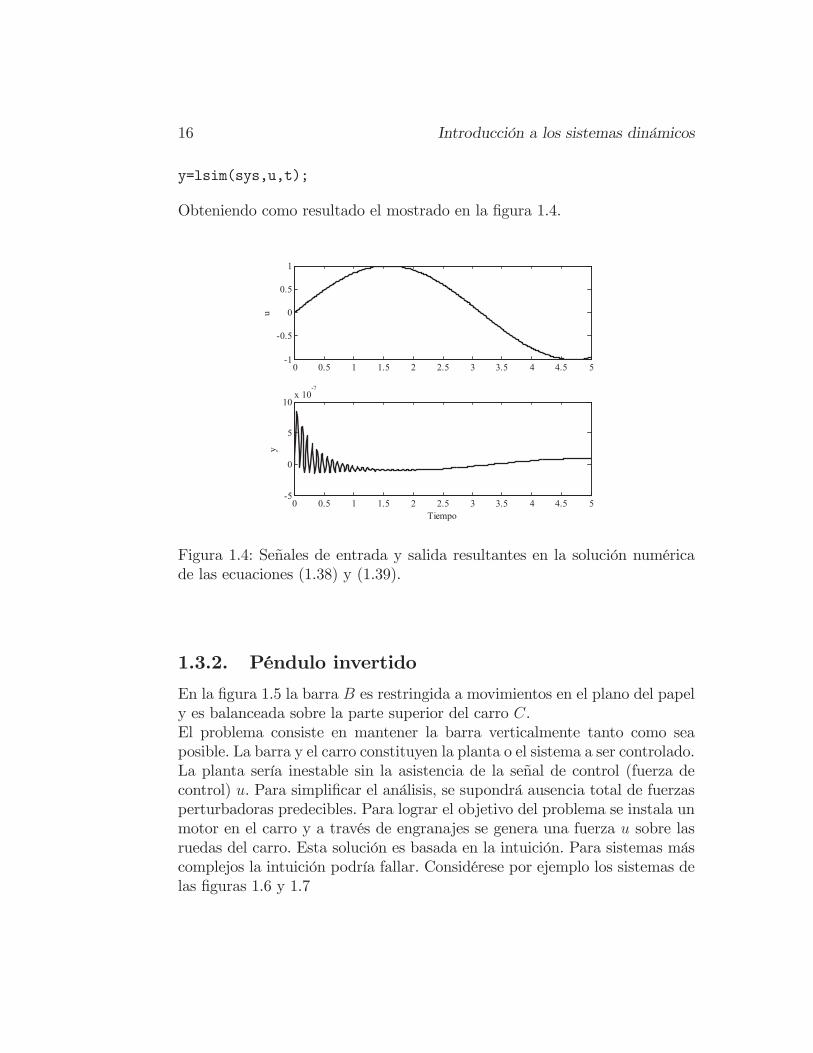
16 Introducción a los sistemas dinámicos
y=lsim(sys,u,t);
Obteniendo como resultado el mostrado en la �gura 1.4.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-1
-0.5
0
0.5
1u
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-5
0
5
10x 10
-7
Tiempo
y
Figura 1.4: Señales de entrada y salida resultantes en la solución numéricade las ecuaciones (1.38) y (1.39).
1.3.2. Péndulo invertido
En la �gura 1.5 la barra B es restringida a movimientos en el plano del papely es balanceada sobre la parte superior del carro C.El problema consiste en mantener la barra verticalmente tanto como seaposible. La barra y el carro constituyen la planta o el sistema a ser controlado.La planta sería inestable sin la asistencia de la señal de control (fuerza decontrol) u. Para simpli�car el análisis, se supondrá ausencia total de fuerzasperturbadoras predecibles. Para lograr el objetivo del problema se instala unmotor en el carro y a través de engranajes se genera una fuerza u sobre lasruedas del carro. Esta solución es basada en la intuición. Para sistemas máscomplejos la intuición podría fallar. Considérese por ejemplo los sistemas delas �guras 1.6 y 1.7

1.3 Ejemplos introductorios a los sistemas lineales 17
Figura 1.5: Péndulo invertido
El sistema de la �gura 1.7 puede ser balanceado mientras que el sistema dela �gura 1.6 no. Esto se debe a que el sistema de la �gura 1.7 es controlablemientras que el de la �gura 1.6 no. Los conceptos de controlabilidad yobservabilidad, serán vistos posteriormente.
Construcción del modelo matemático
El modelo debe revelar cómo la salida del sistema, representada en este casopor la desviación angular �, es afectada por la señal de control u. Paraobtener el modelo matemático, representado por un sistema de ecuacionesdiferenciales, se necesita usar relaciones básicas de la mecánica clásicaaplicables a este sistema físico.En la �gura 1.8 las coordenadas de los centros de gravedad con respecto aun origen arbitrariamente escogido son:
1. Para el carro:posición horizontal : y
2. Para la barra:
posición horizontal : y + L sin�
posición vertical : L cos�

18 Introducción a los sistemas dinámicos
Figura 1.6: Sistema no controlable de 2 barras
Si se toman momentos alrededor del centro de gravedad de la barra ysumando las fuerzas que actúan sobre el carro y la barra en direccionesverticales y horizontal, se obtiene el siguiente sistema de ecuaciones:
Id2�
dt2= V L sin��HL cos� (1.40)
V �mg = md2
dt2(L cos�) (1.41)
H = md2
dt2(y + L sin�) (1.42)
u�H = Md2y
dt2(1.43)
El momento de inercia de la barra I se calcula con respecto a su centro degravedad y es I = 1
3mL2. El sistema de ecuaciones (1.40) a (1.43) se puede
reescribir de la siguiente manera:
I�� = V L sin��HL cos� (1.44)
V �mg = �mL
�
�� sin�+�
_��2
cos�
�
(1.45)
H = m�y +mL
�
�� cos���
_��2
sin�
�
(1.46)
u�H = M �y (1.47)
Nótese que las últimas son ecuaciones diferenciales no lineales. Las 4 variablesdesconocidas son �, y, V ,H, suponiendo que u podría ser especi�cada. Nótese

1.3 Ejemplos introductorios a los sistemas lineales 19
Figura 1.7: Sistema controlable de 2 barras
que este es un problema más de síntesis que de análisis puesto que se debeespeci�car una función adecuada para la señal de control u. Este problemano es simple y no tiene solución única.
Linealización del modelo matemático
Aunque las ecuaciones (1.44) a (1.47) podrían ser resueltas por simulación,se hará por linealización. Cualquier sistema de ecuaciones diferenciales nolineales puede ser linealizado si las variables dependientes son limitadas apequeñas variaciones alrededor de un punto, llamado punto de operación.Nótese de las ecuaciones (1.44) a (1.47) que las no linealidades aparecenfundamentalmente en la variable �. Considérese entonces solamente pequeñasdesviaciones del ángulo � : � � 1 rad. Utilizando la expansión en series deTaylor:
f (x) =1X
n=0
f (n) (x0)
n!(x� x0)
n
las funciones sin� y cos� se pueden expandir alrededor del punto � = 0 sin

20 Introducción a los sistemas dinámicos
Figura 1.8: Diagramas de cuerpo libre de la barra y el carro
considerar las derivadas de orden superior a 1 como:
sin� = ���3
3!+ � � � � � (1.48)
cos� = 1��2
2!+ � � � � 1 (1.49)
Reemplazando (1.48) y (1.49) en las ecuaciones (1.44) a (1.47), yconsiderando que las potencias de �, sus derivadas, y multiplicaciones de�; son aproximadamente cero, se obtiene
I�� = V L��HL (1.50)
V �mg = 0 (1.51)
H = m�y +mL�� (1.52)
u�H = M �y (1.53)

1.3 Ejemplos introductorios a los sistemas lineales 21
Eliminando V y H del anterior sistema de ecuaciones se obtiene
�
I +mL2�
��+mL�y �mgL� = 0 (1.54)
mL��+ (m+M) �y = u (1.55)
De�niendo x1 = �, x2 = _�, x3 = y, x4 = _y, y reescribiendo el sistema comoecuaciones diferenciales de primer orden a partir de las ecuaciones (1.54) y(1.55) se obtiene
_x1 = x2 (1.56)
_x2 =(m+M)mgL
I (m+M) +mML2x1 �
mL
I (m+M) +mML2u (1.57)
_x3 = x4 (1.58)
_x4 =gm2L2
I (m+M) +mML2x1 �
(I +mL2)
I (m+M) +mML2u (1.59)
Las ecuaciones (1.56) a (1.59) se pueden reescribir en forma matricial,obteniendo la ecuación de estado y la ecuación de salida de la forma
2
6
6
4
_x1_x2_x3_x4
3
7
7
5
=
2
6
6
6
4
0 1 0 0(m+M)mgL
I(m+M)+mML20 0 0
0 0 0 1gm2L2
I(m+M)+mML20 0 0
3
7
7
7
5
2
6
6
4
x1x2x3x4
3
7
7
5
+
2
6
6
6
4
0� mLI(m+M)+mML2
0
�(I+mL2)
I(m+M)+mML2
3
7
7
7
5
u (t)
(1.60)
�
y1 (t)y2 (t)
�
=
�
1 0 0 00 0 1 0
�
2
6
6
4
x1x2x3x4
3
7
7
5
(1.61)
donde de la ecuación (1.61) se observa que las salidas del sistema y1 (t) yy2 (t) corresponden a � (t) y y (t), respectivamente.