instrumentación y control de velocidad de una máquina de
TRANSCRIPT

,
TECNOLOGICO DE MONTERREY®
Instituto Tecnológico y de Estudios
Superiores de Monterrey
Campus Ciudad de México
División de Ingeniería y Arquitectura
Ingeniería en Sistemas Electrónicos
Ingeniería Mecatrónica
Departamento de Mecatrónica
TECNOLÓGICO DE MONTERREY
BIBLIOTECA ,; _áq1pus Ciudad de MelV<;o.
Instrumentación y Control de Velocidad de una Máquina de Motores Acoplados
Profesor: MBA/ lng. José Vicente Quintanilla
Autores: Daniel Guevara Hernández
Juan Carlos Gutiérrez Martínez
Jesús Patiño Zarco
Asesor: Dr. Marco Antonio Paz Ramos
México D.F. Enero-Mayo 2007
Semestre Enero-Mayo 2007
INDICE: Introducción ...................................................................................................................................................................... 4
Objetivo General .............................................................................................................................................................. 4
Objetivos Específicos· ............................................................................................................................................... 4
Estado del arte .................................................................................................................................................................. 5
Problemática ..................................................................................................................................................................... 5
Marco teórico .................................................................................................................................................................... 7
Parte Mecánica ............................................................................................................................................................. 7
Parte eléctrica ............................................................................................................................................................... 8
Fuente de voltaje directo ..................................................................................................................................... 8
Transformador ........................................................................................................................................................ 9
Rectificación de onda completa ..................................................................................................................... 1 O
Capacitor ................................................................................................................................................................ 1 1
Regulador de voltaje .......................................................................................................................................... 12
Amplificador Operacional. .............................................................................................................................. 13
Filtros ....................................................................................................................................................................... 15
Parte de control ........................................................................................................................................................ 15
Obtención de la función de transferencia de un circuito ..................................................................... 15
Curva de Reacción .............................................................................................................................................. 16
Sistemas de Primer Orden ............................................................................................................................... 17
Propuesta de solución ................................................................................................................................................ 19
Resultados y pruebas .................................................................................................................................................. 20
Filtros ........................................................................................................................................................................... 21
Fuente de voltaje y amplificadores de ganancia 10 .................................................................................... 25
2

Instrumentación de las entradas ....................................................................................................................... 26
Tabla con circuito impreso y acondicionamiento del cableado ............................................................ 28
Funciones de transferencia .................................................................................................................................. 30
Controladores ........................................................................................................................................................... 34
Actividades en LabView ....................................................................................................................................... 37
Diagrama y Tabla de Conexiones Finales ............................................................................................................. 42
Conclusiones y trabajo futuro ................................................................................................................................. 45
Conclusiones ............................................................................................................................................................. 4 5
Trabajo futuro ........................................................................................................................................................... 45
Actividades realizadas ............................................................................................................................................... 45
Referencias ...................................................................................................................................................................... 46
3
Introducción En la actualidad existen diversos procesos industriales en los cuales se ven involucrados una
serie de rodillos que transportan algún material para, poder ser procesado en una maquina,
pasar de un proceso a otro, pasar de una estación de trabajo a otra o incluso para realizar sobre
los rodillos un trabajo. Ejemplos de este tipo de procesos son: la rotativas de los periódicos, las
maquinas papeleras, las laminadoras de acero, los procesos textiles, etc.
Sin embargo la falla en estos sistemas puede ocasionar grandes pérdidas económicas para las
empresas debido a paros o fallas en las líneas de producción. Lo anterior, sin contar con los
gastos que ocasiona que el material puede ser dañado, deformado, maltratado o simplemente
no tiene las especificaciones correctas.
Por esta razón es importante que dichos procesos estén perfectamente bien controlados y en
esta área pretendemos situar nuestro proyecto.
Nuestro proyecto ofrece una solución para que los alumnos de la materia de control tengan la
oportunidad de enfrentar y manejar este tipo de problemas en base a un prototipo que emula
este tipo de fenómenos para una mejor formación.
Objetivo General Realizar la parte de eléctrica de potencia de la máquina para posteriormente diseñar el control
electrónico de la velocidad e instrumentación total de una máquina de motores acoplados. La
máquina cuente con dos motores de DC y tres rodillos para mantener una tensión adecuada en
la banda continua que hay entre los tres rodillos.
Objetivos Específicos: • Construir una fuente fija de 50 V.
• Construir 2 amplificadores de potencia que pueden trabajar con voltajes de hasta 100 V.
• Construir 4 amplificadores, cada uno diseñado para las entradas del sistema para
trabajar en un rango de O a 10 V.
• Construir el circuito impreso en placa.
• Diseño de un controlador PI para un motor.
• Construir y aplicar el control para la velocidad de la polea.
4

Estado del arte La máquina de motores acoplados, que se basa en la máquina CE108 de Tecquiment Inc. (Figure
1 ), está diseñada para el estudio de sistemas dinámicos e ingeniería de control multivariable
usando control analógico y digital.
T
Figura 1 CEJOS Tecquiment Inc.
La máquina está diseñada para simular la clase de problema donde existe transporte de
material industrial como ocurre en procesos reales dentro de la industria tales como: imprentas,
máquinas textiles, plantas de producción de metal, etc.
La máquina consta de dos motores de DC (50 VDC/1000 RPM) que están acoplados por una
banda continua. La banda también pasa por polea que esta instrumentada para permitir la
medición de tensión y velocidad de la banda. El problema principal es lograr controlar la
velocidad y la tensión de la banda de manera desacoplada, es decir, cuando se afecte la tensión,
la velocidad no se verá afectada y viceversa.
Problemática Anteriormente en la materia de proyectos de ingeniería un equipo integrado por mecatrónicos
desarrolló un aparato de motores acoplados (Figura 2 y 3) pero sólo realizaron la parte mecánica
y la parte de los motores del aparato, a dicho aparato le falta que se le desarrolle la parte de
electrónica de potencia para poder funcionar de manera independiente y, también, la parte de
control de la velocidad para de este modo quedar únicamente pendiente la parte de control de
la tensión.
5
• Figura 2 Máquina de Transmision Acoplada
figura:, !\láquina de Tr;insmi~ión . .\copiada
6
El prototipo desarrollado sólo tiene la parte mecánica, es por esto que requerimos dar a los
motores una alimentación propia. Para alimentar a los motores se ha decidido alimentarlos con
un amplificador. El amplificador recibe la señal de control y la amplifica 10 veces para de esta
manera darle a los motores una señal de voltaje directo que tiene valores entre los O y los 50
volts.
Aunado a esto, la señal de control es una señal de voltaje relativamente pequeño, pues su rango
está entre los O y los 5 volts (debido a que es el voltaje que entregan las tarjetas de adquisición
de datos), para poder desarrollar la parte de control también es importante realizar una etapa
de ganancia ( en este caso de 10) para poder aplicar voltajes más grandes en los motores. La
fuente que se diseñó, trabaja entre los O y 50 volts para poder alimentar al amplificador.
Además de las partes antes mencionadas, a la máquina le falta todo el sistema de control con la
finalidad de mantener un cierto valor deseado de la velocidad en la banda que los une.
Recordemos que la banda simula el material que se utiliza en la industria y si logramos realizar
el control de la misma, podemos aplicar estos conocimientos y estas técnicas para evitar que se
dañe el material o que se rompa, y de esta manera se evitarían pérdidas de tiempo en las líneas
de producción y costos por el material desperdiciado.
Marco teórico La máquina que pretendemos controlar involucra varios conceptos y varias áreas de la
ingeniería, pero como ya se menciono la parte mecánica está casi terminada, por lo que nos
enfocaremos, principalmente, a explicar las partes de eléctrica y electrónica.
Parte Mecánica Cuando se tiene una banda que pasa por dos poleas, de forma teórica se sabe que si las
velocidades angulares en las poleas son las mismas entonces en la banda el valor de la tensión
es O. Por otro lado cuando las velocidades son diferentes la banda tiende a estirarse o a
aflojarse, es decir la banda pierde o gana velocidad lineal, debido a que la tensión en la banda es
la que proporciona la velocidad de la banda. En la figura 4 se muestra el movimiento de la
banda y su efecto en la polea sub actuada en el resorte.
7
\ 0
Figura 4 Diagrama de Movimientos en las poleas
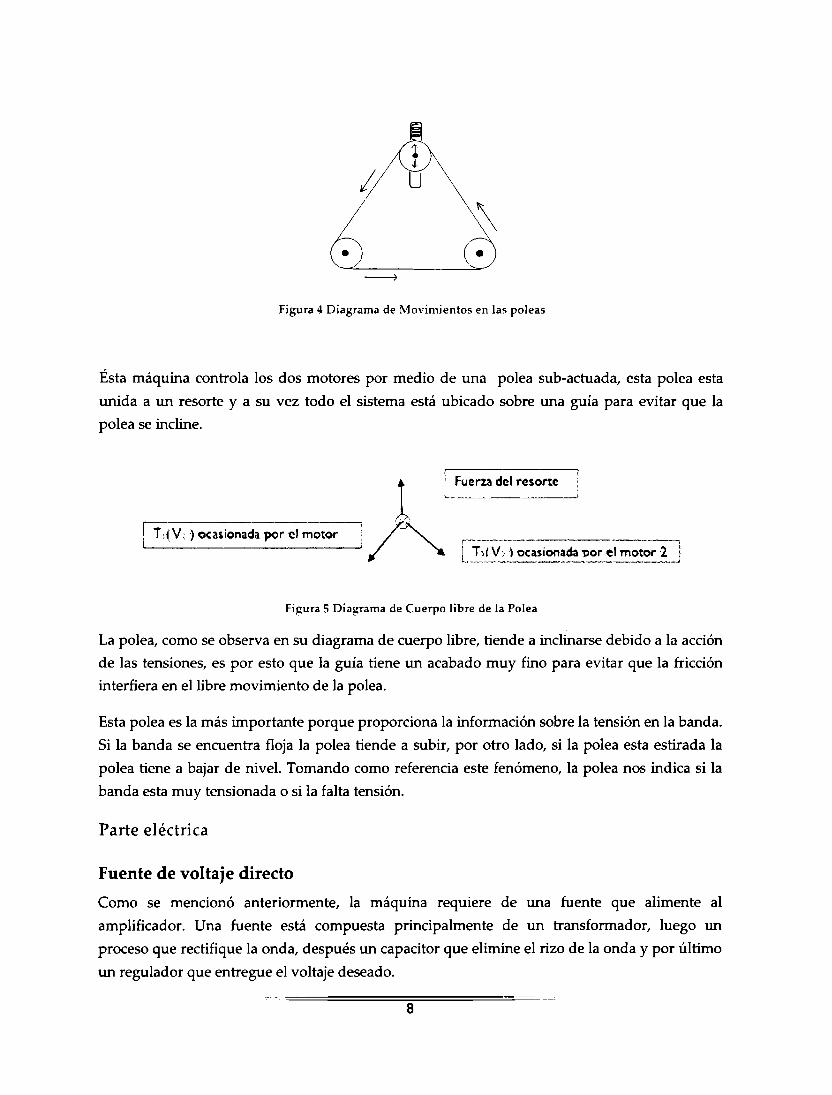
Ésta máquina controla los dos motores por medio de una polea sub-actuada, esta polea esta
unida a un resorte y a su vez todo el sistema está ubicado sobre una guía para evitar que la
polea se incline.
ÍTi<_V_:_')_oc_a-si-o-na_d __ a_po_r_c_l_m_o_t_or-~j )~
Fueru del resorte
L"!:.~!Y; -~ ocasionada ,:¡or el motor -2 ]
Fi~ura 5 Diagrama de Cuerpo libre de la Polea
La polea, como se observa en su diagrama de cuerpo libre, tiende a inclinarse debido a la acción
de las tensiones, es por esto que la guía tiene un acabado muy fino para evitar que la fricción
interfiera en el libre movimiento de la polea.
Esta polea es la más importante porque proporciona la información sobre la tensión en la banda.
Si la banda se encuentra floja la polea tiende a subir, por otro lado, si la polea esta estirada la
polea tiene a bajar de nivel. Tomando como referencia este fenómeno, la polea nos indica si la
banda esta muy tensionada o si la falta tensión.
Parte eléctrica
Fuente de voltaje directo
Como se mencionó anteriormente, la máquina requiere de una fuente que alimente al
amplificador. Una fuente está compuesta principalmente de un transformador, luego un
proceso que rectifique la onda, después un capacitor que elimine el rizo de la onda y por último
un regulador que entregue el voltaje deseado.
8
Vl !l =1c:
I~~! r·111 ~ 1 '-ª
Transformador
Dl l.!W!40
....L. C:l 00::l
-:-
C4 300 .. r
D3 lB4éC2
1
! 1 1
~~ .Slic
'
i ' t .. . '.et
D5 1114002
U.2 ~31
i u : lB4002
!
1)4 lli4002
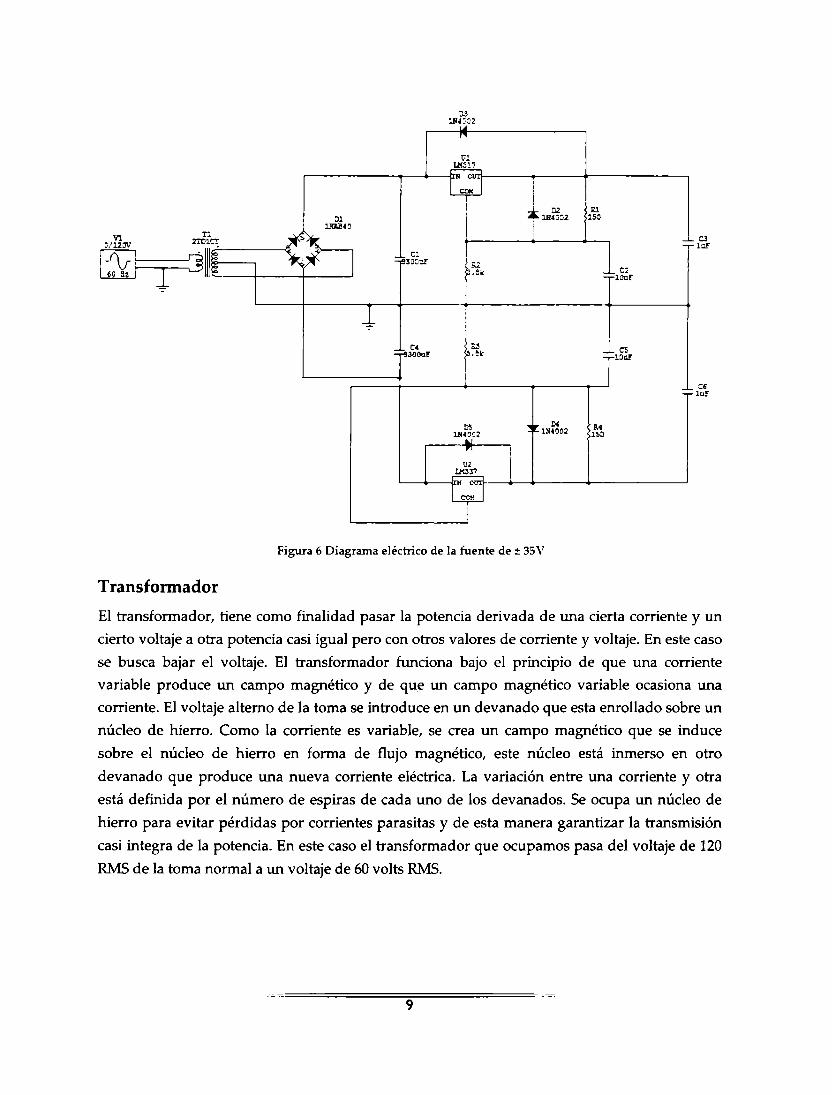
Figura 6 Diagrama eléctrico de la fuente de ± 35V
~al 150
J ....L.. C3
le; ....,...1u!"
10uF
....L.. e; ~lOal
C6 lu!
l\4 1Sü
El transformador, tiene corno finalidad pasar la potencia derivada de una cierta corriente y un
cierto voltaje a otra potencia casi igual pero con otros valores de corriente y voltaje. En este caso
se busca bajar el voltaje. El transformador funciona bajo el principio de que una corriente
variable produce un campo magnético y de que un campo magnético variable ocasiona una
corriente. El voltaje alterno de la torna se introduce en un devanado que esta enrollado sobre un
núcleo de hierro. Corno la corriente es variable, se crea un campo magnético que se induce
sobre el núcleo de hierro en forma de flujo magnético, este núcleo está inmerso en otro
devanado que produce una nueva corriente eléctrica. La variación entre una corriente y otra
está definida por el número de espiras de cada uno de los devanados. Se ocupa un núcleo de
hierro para evitar pérdidas por corrientes parasitas y de esta manera garantizar la transmisión
casi integra de la potencia. En este caso el transformador que ocuparnos pasa del voltaje de 120
RMS de la torna normal a un voltaje de 60 volts RMS.
9

Figura í Transformador con Derivación Central ±60V
Rectificación de onda completa.
El nivel de "DC" obtenido de una entrada senoidal se puede mejorar en un 100 % mediante la
utilización de la rectificación de onda completa. La forma más común para lograr este proceso
es por medio de un puente de diodos. Si se observa la figura 9, se ve que durante el primer
medio del periodo dos diodos del puente de diodos son los que permiten el paso cuando la
onda está en su parte positiva, los otros dos permanecen inactivos, mientras que en la siguiente
mitad del periodo los diodos que antes permanecían inactivos son los que ahora permiten el
paso de corriente, permitiendo una rectificación completa de la onda senoidal.
,/
Figura 1 Puente de Diodos l\'004
10

V¡
+
Capacitor
+
V¡
Figura 2 Gráfica teórica de rectificación de onda Senoidal
Onda rectificada (onda co"l)leta)
Figura 3 Señal de osciloscopio Onda Rectificada por puente de diodos.
t
El capacitor no permite cambios bruscos de voltaje por lo que una vez que se carga, requiere de
un tiempo ('r) para poderse descargar por lo que no permite que la onda rectificada varíe. Una
vez que la señal sale del capacitor se tiene una señal casi puramente de corriente directa.
11
¡ ¡
\
. -. Regulador de voltaje
.. .. _-·
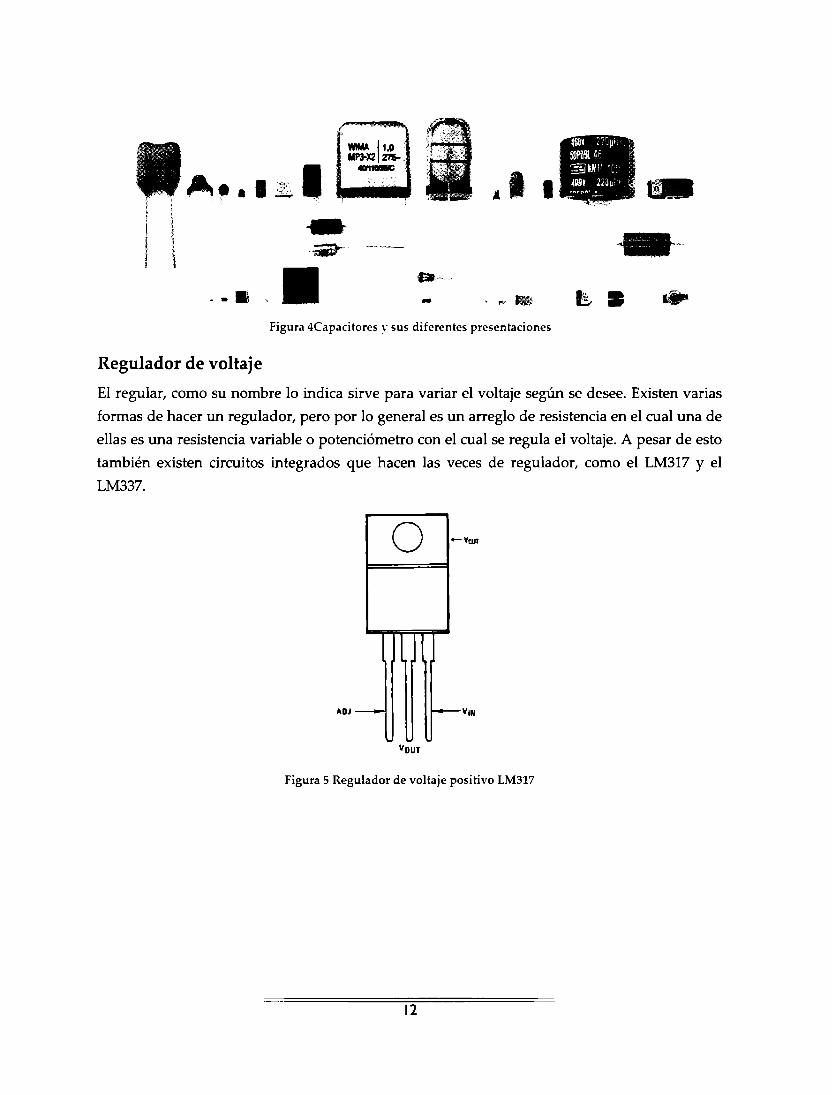
- ...,. Figura 4Capacitores y sus diferentes presentaciones
El regular, como su nombre lo indica sirve para variar el voltaje según se desee. Existen varias
formas de hacer un regulador, pero por lo general es un arreglo de resistencia en el cual una de
ellas es una resistencia variable o potenciómetro con el cual se regula el voltaje. A pesar de esto
también existen circuitos integrados que hacen las veces de regulador, como el LM317 y el
LM337.
o +-
1 l l ADJ --- ----
.. Vour
Figura 5 Regulador de voltaje positivo LM317
12
ADJUSTMENT
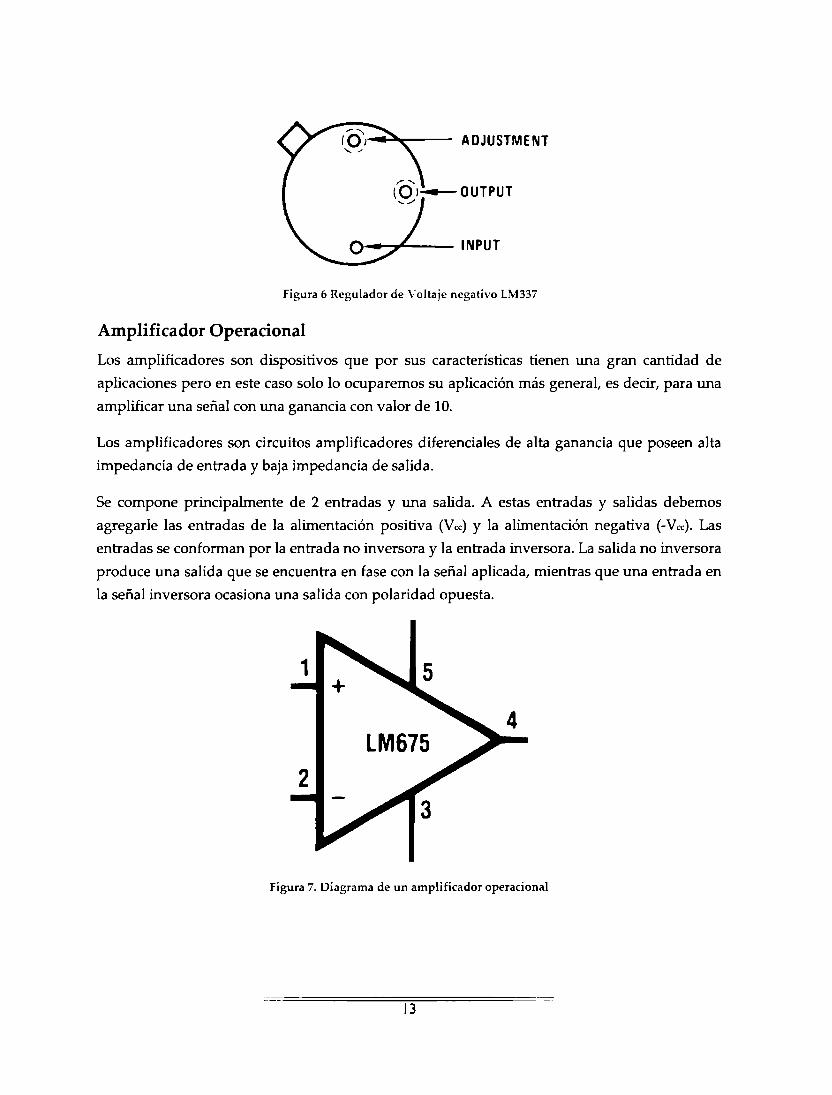
Figura 6 Regulador de \'oltaje negativo LM337
Amplificador Operacional
Los amplificadores son dispositivos que por sus características tienen una gran cantidad de
aplicaciones pero en este caso solo lo ocuparemos su aplicación más general, es decir, para una
amplificar una señal con una ganancia con valor de 10.
Los amplificadores son circuitos amplificadores diferenciales de alta ganancia que poseen alta
impedancia de entrada y baja impedancia de salida.
Se compone principalmente de 2 entradas y una salida. A estas entradas y salidas debemos
agregarle las entradas de la alimentación positiva (Vcc) y la alimentación negativa (-Vcc). Las
entradas se conforman por la entrada no inversora y la entrada inversora. La salida no inversora
produce una salida que se encuentra en fase con la señal aplicada, mientras que una entrada en
la señal inversora ocasiona una salida con polaridad opuesta.
Figura 7. Diagrama de un amplificador operacional
13
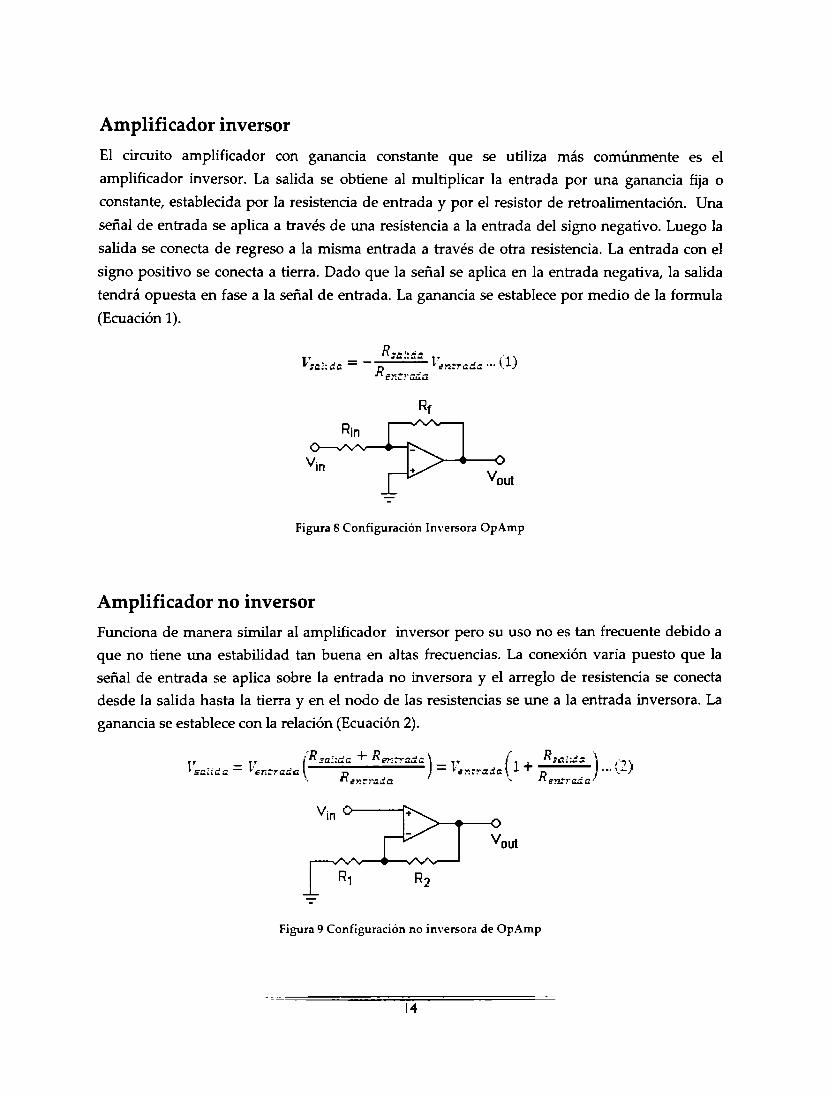
Amplificador inversor
El circuito amplificador con ganancia constante que se utiliza más comúnmente es el
amplificador inversor. La salida se obtiene al multiplicar la entrada por una ganancia fija o
constante, establecida por la resistencia de entrada y por el resistor de retroalimentación. Una
señal de entrada se aplica a través de una resistencia a la entrada del signo negativo. Luego la
salida se conecta de regreso a la misma entrada a través de otra resistencia. La entrada con el
signo positivo se conecta a tierra. Dado que la señal se aplica en la entrada negativa, la salida
tendrá opuesta en fase a la señal de entrada. La ganancia se establece por medio de la formula
(Ecuación 1).
Figura 8 Configuración Inversora OpAmp
Amplificador no inversor
Funciona de manera similar al amplificador inversor pero su uso no es tan frecuente debido a
que no tiene una estabilidad tan buena en altas frecuencias. La conexión varia puesto que la
señal de entrada se aplica sobre la entrada no inversora y el arreglo de resistencia se conecta
desde la salida hasta la tierra y en el nodo de las resistencias se une a la entrada inversora. La
ganancia se establece con la relación (Ecuación 2).
Figura 9 Configuración no inversora de OpAmp
14
Filtros
Un filtro eléctrico es un elemento que no deja pasar una determinada frecuencia o gama
de frecuencias de una señal eléctrica que pasa a través de él, pudiendo modificar tanto
su amplitud como su fase.
Es posible reducir la cantidad de rizo de una señal a través de un filtro de capacitar
mediante una sección adicional de filtro RC. El propósito de la sección RC adicional es
dejar pasar la mayor cantidad de DC mientras que se atenúa (reduce) la componente de
AC de la señal.
Existen diferentes tipos de filtros, pero los utilizados en este proyecto son los filtros
pasivos. Estos filtros a su vez se dividen en:
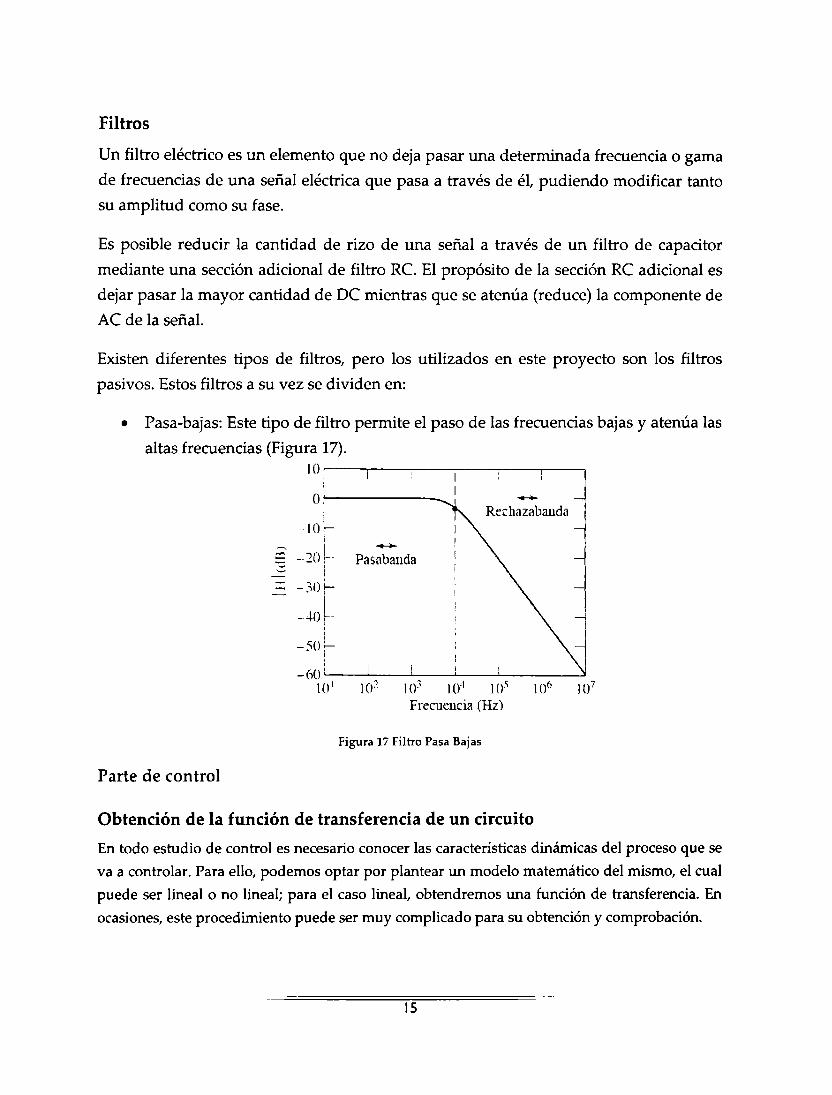
• Pasa-bajas: Este tipo de filtro permite el paso de las frecuencias bajas y atenúa las
altas frecuencias (Figura 17).
Parte de control
1 O r-, --,------------.-----.
ºi
-10~
~ -:W~
-30r ---40 r
! -50 ¡_
i
...... Rechaza banda
........ Pasa banda
j
1
-60 ~I __ ..__ _ __._1 __ ..__ _ ___._ ____ __.
10 1 1 01 1 o:- 1 0·1 1 o5 1 06 1 o 7
Frecuencia (Hz)
Figura 17 Filtro Pasa Bajas
Obtención de la función de transferencia de un circuito
En todo estudio de control es necesario conocer las características dinámicas del proceso que se
va a controlar. Para ello, podemos optar por plantear un modelo matemático del mismo, el cual
puede ser lineal o no lineal; para el caso lineal, obtendremos una función de transferencia. En
ocasiones, este procedimiento puede ser muy complicado para su obtención y comprobación.
15

El método que ocuparemos para la obtención de la función de transferencia será por medio de
la curva de reacción del circuito cuando se le aplica una entrada escalón.
Curva de Reacción
El método de "curva de reacción" consiste en introducir una perturbación tipo escalón o
impulso en la variable de control u(t), respecto a un punto de operación normal del proceso, y
registrar la respuesta y(t). Una vez que se tiene este registro, se procede a entonces a proponer
una función de transferencia cuya respuesta a la misma entrada usada en el proceso real,
reproduzca la salida, 'lo mejor posible'. Tal procedimiento, se ilustra en la Figura 18
.________,,> PROCESO A
u(t)
1 to
a) Obtención de una curva de
u(t)
_u(_s)_,. ......,I __ G_(s_) _ _:I -Y-(s)••
&.,,,'.¿;h:,..,,;.,:f:,_,_...;~;, ,._, ,;,,~>L-,,·<J;...
, to
~t) ¡--;--;;== 1 to
b) Obtención de una función de transferencia
Figura 18 Curva de reacción, usando una entrada escalón.
El fundamento teórico de este análisis está basado en que si tenemos una función de
transferencia (Ecuación 2)
16

,,( "\
G (s) = '~-~ ... (2) U'S)
Como conocemos la entrada U(s), podemos encontrar Y(s), por ende, y(t). Si la entrada al
sistema en prueba fuera un impulso unitario '5(1), U(s) = 1, entonces la salida está dada por la
Ecuación 3
y(t) ;;;;;; C 1 [G(s)] ... (3)
es decir, que la curva de reacción de y(t) corresponde a g(t), por lo que G(s) se determina
directamente. En el caso de tener una entrada escalón, U(s) = 1/s, entonces la salida del sistema
está dada por la Ecuación 4.
y(t) = i-1 [G:=1 .. (4)
El problema, visto desde la perspectiva de identificación de sistemas, consiste en determinar
una función de transferencia del sistema bajo prueba, cuya respuesta a una entrada escalón
produzca una respuesta dinámica "muy parecida" a la original; generalmente, este proceso se
basa en la heurística, como se ilustra a continuación.
El método de la curva de reacción se utiliza intensamente en la industria de procesos para
caracterizar un sistema, al cual se le va a diseñar un sistema de control, ya sea tipo PID o
controladores más sofisticados como control avanzado.
Como nuestros motores tienen una función de transferencia de primer orden se estudiara la
obtención de funciones de primer orden.
Sistemas de Primer Orden
El objetivo de esta sección es ajustar una función de transferencia de primer orden a la respuesta
de un sistema real cuando la entrada es un escalón. Una suposición básica es que la respuesta
real del sistema no presenta sobretiro, o sobrepaso. Para el caso en que no se presenta un
retardo en la respuesta del sistema, respecto al momento de la aplicación del cambio en la
entrada, suponemos que el sistema puede representarse como un sistema de la forma (Ecuación
5)
K G(s)=-- ... (5)
as+l
donde K es la ganancia del sistema y a es la constante de tiempo, ambas desconocidas. La
respuesta en tiempo de este sistema, a una entrada escalón unitario, está dada por la Ecuación 6
17

~ Desconocido y(t) = K(I-e-11 ª ) ... (6)
\_ Desconocida
En la Figura 17 presentamos esta respuesta. A partir de esta respuesta, podemos calcular K y a,
de la siguiente manera:
La ganancia K se puede calcular a partir del valor final al que tiende la variable de salida
(Ecuación 7):
lim y(t) = K = y( oo ) ... (7) /-+00
La constante de tiempo a se calcula como sigue (Ecuación 8):
y(a) = 0.632y(oo) = 0.632K ... (8)
Es decir, que la determinación de la constante de tiempo es por medio del cálculo del valor del
63.2% del valor final de la variable medida, y la constante de tiempo a es el instante en que se
da ese valor. En el caso en que la entrada es una función escalón, pero de amplitud A, se debe
hacer un ajuste en las expresiones arriba descritas; a continuación, presentamos un ejemplo para
ilustrar este método.
18

K
----------------·----·-·---·····----···--
C'111Ya de rencc1ón
----/ .... - -.... /
/, / •
/ ~
• / 1
I 1 a liempo.s
~ ~
Figura 19 Respuesta Escalonen Sistema de Primer Orden
Propuesta de solución Los requerimientos del sistema son los siguientes:
• Una fuente que alimente a los amplificadores.
• Unos amplificadores que alimenten a los motores.
• Unos amplificadores que envíen la señal de los sensores a la tarjeta de adquisición de
datos.
• Un programa que controle la velocidad de la banda.
• Una placa que contenga todos estos elementos para poder darle independencia al
prototipo.
Corno se requieren unos amplificadores para que las entradas tengan una señal que varíe entre
los O V y los 10 V, se necesita otra fuente (ésta, mucho más pequeña y simple) que alimente a
estos nuevos amplificadores.
La propuesta que tenernos para realizar el proyecto es:
a) Para las fuentes :
• Diseño y simulación de una fuente de O a 50 volts en Circuit Maker.
• Implantar la fuente, que al menos nos debe de mantener unos voltajes estables de -41
V y 47 V volts, con reguladores LM317HV y LM337HV.
• Diseño y simulación de una fuente de O a 12 V.
• Implantar la fuente pequeña con reguladores L7915CV y L7815C.
19
b) Para los amplificadores de potencia:
• Diseñar y simular el amplificador en TINA.
• Implantar el amplificador por medio de transistores del tipo TIP41C y TIP42C,
configurado de la forma no inversora, debido a que no tenemos problemas de altas
frecuencias y además siempre se van a ocupar voltajes positivos.
c) Para los amplificadores de las entradas:
• Diseñar y simular los amplificadores en CircuitMaker.
• Implementar dichos amplificadores por medio de circuitos integrados del tipo
LM741, con una configuración del tipo no inversora.
d) Para la obtención de las funciones de transferencia
• Implementar los filtros RC para obtener unas gráficas más nítidas del
comportamiento de los motores y la polea.
• Utilizar algún método para la obtención de una función de transferencia aproximada
de cada una de las partes del sistema.
e) Para el sistema de control.
• Diseñar unos controladores PI.
• Implantación del sistema de control de la velocidad por medio de LabView.
f) Para la placa con el circuito integrado.
• Diseño de las pistas por medio de TraxMaker
• Acondicionamiento de las entradas y salidas del circuito de tal suerte que el extenso
cableado del prototipo sea lo más sencillo posible.
Resultados y pruebas Los resultados hasta el momento son:
• Reducción de los desperfectos mecánicos de la máquina.
• Realización de las fuentes.
• Realización de amplificadores de potencia.
• Instrumentación de las entradas.
• Configuración e instrumentación del sensor de posición.
• Diseño de los controladores para los motores.
• Creación del programa de LabView para el control de la velocidad.
• Integración total de todas las partes del proyecto en una sola placa.
Los datos que tenemos para trabajar son:
• Los motores pueden trabajar desde los 12 V hasta los 100 V.
20

• Demanda de amperaje de los motores, hasta 0.080 A a 50 V.
• Voltajes que entregan los motores de DC utilizados como sensores. Para el motor 1, 2 y
la polea el voltaje fluctúa entre los O y los 600 m V , cuando el voltaje fluctúa entre los O y
los 50 V.
• Valores de las resistencias y capacitares que se usaran en los filtros RC. Para el motor 1
y 3 las resistencias son de 47.8 KO y capacitares de 1 µF. Para el motor 2 la resistencia es
de 66.8 KO y el capacitar de también de 1 µF.
• La fuente de voltaje puede entregar hasta un máximo de ±45 V porque los reguladores
que mandamos pedir no soportan voltajes superiores.
• Funciones de transferencia de los motores y de la polea.
• Ganancias Kp y Ti.
• Diseño del control PI en LabView.
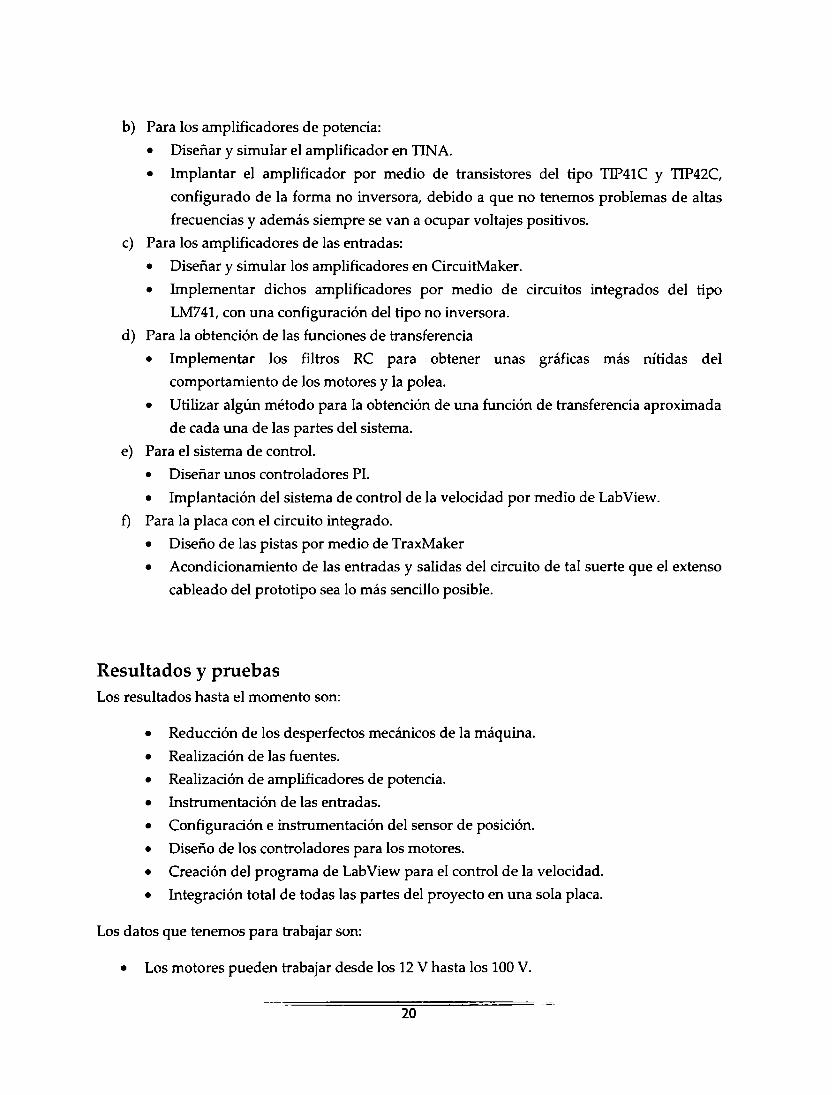
Filtros Para el diseño de los filtros se necesitan las frecuencias de ruido de los 3 sensores. Para el motor
1 y la polea la frecuencia resultó ser de 33.33 Hz y el período de 30 ms (Figura 20 y 21) y para el
otro motor la frecuencia fue de 23.81 Hz y el periodo de 42 ms (Figura 22). Para eliminar el
ruido de los sensores se procedió a diseñar filtros pasa-bajas para cada uno de los sensores.
Los valores de las frecuencias se tienen que expresar en rad/seg y las cuales se encuentran ya en
estos valores en las Ecuaciones 9 y 10. Para obtener los valores de los capacitares y las
resistencias se utilizo la Ecuación 11, en la cual fe' se refiere a la frecuencia del ruido de los 3
sensores. Debido a que la ecuación tiene 2 incógnitas (R y C) se tiene que fijar el valor de C.
[ ' - ·~ ~ 33 ..,_ - "O 9 ,1-, rad / t9) P1-jj, X.:.....<L-~ ··-- ,seo···'·
f ,tt/ - 'J9 41 V ..,_ - ·1a l 79 rad / /10)· ,, : - - · "" -" - -t. ,.. seg ··· 1..
1 s-p' J .. 1' RC=W ... c) J
Para nosotros C será de 1 µF. Ya que cuando usamos un capacitor de 0.47 µF se requería de
resistencias por el orden de los megas, lo que ocasionaba que el voltaje de la señal filtrada se
perdiera. Los valores de R para el motor 1 y la polea es de 47.8 KO y para el motor 2 es de 66.8
KO De la Figura 23 a la 25 se muestran los voltajes filtrados con una entrada escalón de 15 V.
21
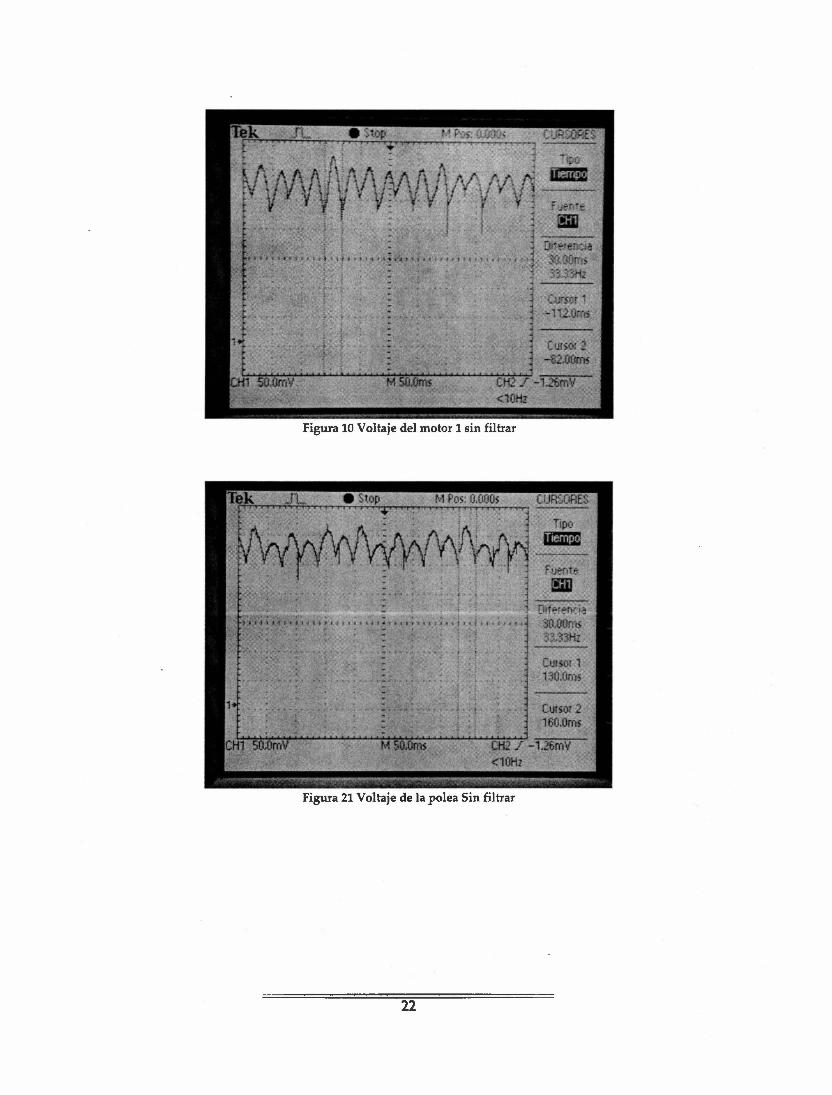
Figura 10 Voltaje del motor I sin filtrar
Figura 21 Voltaje de la polea Sin filtrar
22
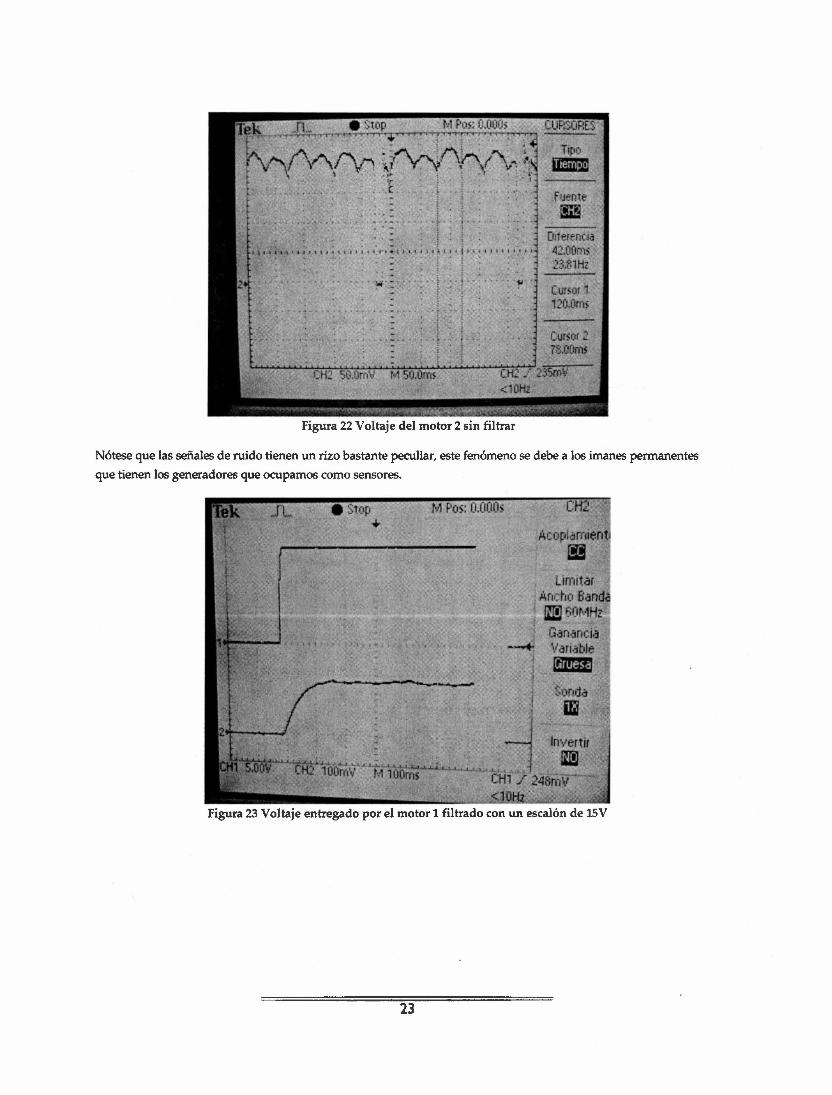
Figura 22 Voltaje del motor 2 sin filtrar
Nótese que las señales de ruido tienen un rizo bastante peculiar, este fenómeno se debe a los imanes permanentes
que tienen los generadores que ocupamos como sensores.
Figura 23 Voltaje entregado por el motor 1 filtrado con un escalón de 15V
23
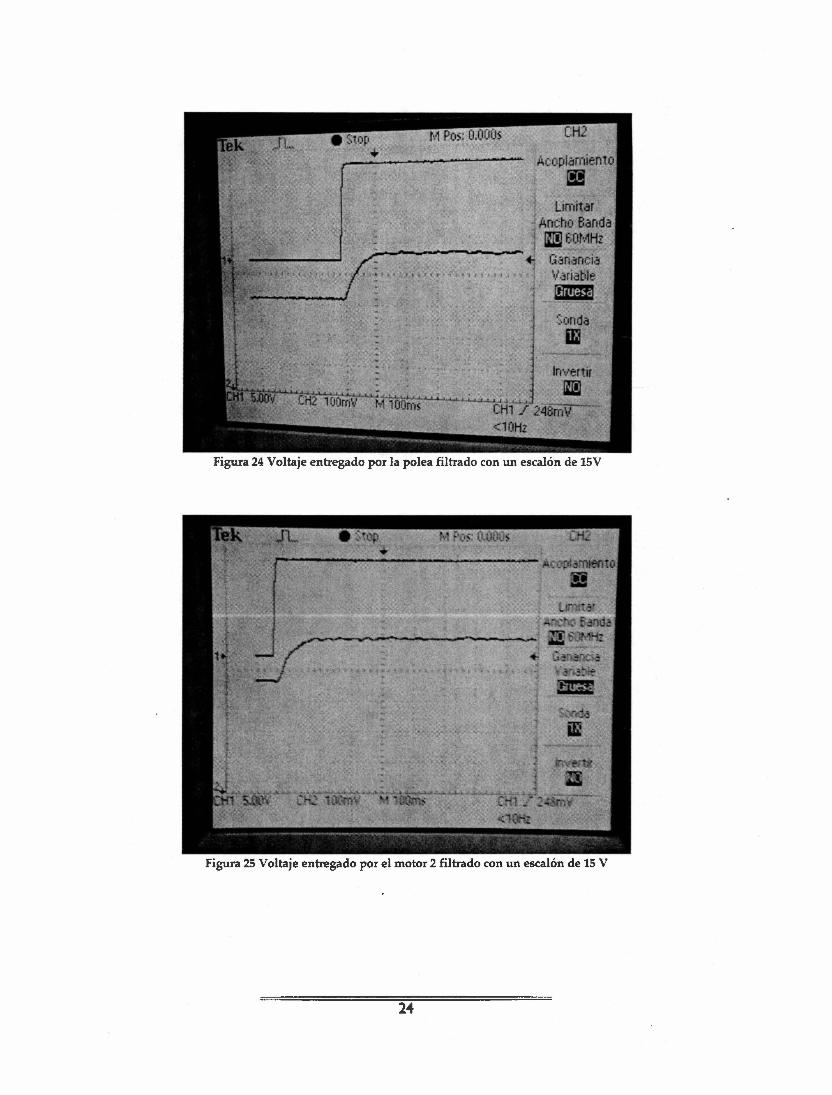
Figura 24 Voltaje entregado por la polea filtrado con un escalón de 15V
Figura 25 Voltaje enh'egado por el motor 2 filh'ado con un escalón de 15 V
24

Fuente de voltaje y amplificadores de ganancia 10 Una de las actividades que nos tomó más tiempo realizar fue la fuente de voltaje. El diseño se
obtuvo del Capítulo 18 del libro Boylestad, pero se tuvieron que cambiar los valores de las
resistencias que tenía esa configuración. Para obtener los valores de las resistencias se trabajó
con la Ecuación 12, poniendo como voltaje de salida 48 V, Rl de 150 O y voltaje de referencia de
1.25 V y corriente adjunta de 100 µA. Después de armar la fuente y probarla junto con un
transformador 2:1 (120 V: 60V) obtuvimos satisfactoriamente 47.7 V (Figura 26).
Figura 26 Fuente Entregando un voltaje de 47.7\1
Cabe aclarar que al principio no contábamos con los reguladores que ocupamos al final del
proyecto, por esta razón se estuvo trabajando, en un principio, con una fuente de 30 V.
Por último, una vez que nos llegaron los reguladores que aceptan voltajes de hasta 47 V nos
dimos a la tarea de modificar nuestra fuente previa de 30 V para poder obtener voltajes mucho
más altos y de esta manera poder controlar los motores en voltajes mucho mayores.
Los cambios fueron básicamente en las resistencias que quedaron con valores de 5.6 KO para la
parte positiva y de 5 KO para la parte negativa, con esto nos entregaron voltajes de 47.8 V y de
-41.3 V respectivamente.
25

Una vez terminada la fuente de poder nos dimos a la tarea de probar el amplificador
operacional en su configuración inversora y no inversora, ambas configuraciones la usamos
para obtener una ganancia cercana a 10 pero con un valor exacto de 9.81, esta ganancia es
suficiente porque evita la saturación de la alimentación de la fuente en los transistores.
Los amplificadores que se diseñaron, se armaron con 2 TIP41C y un TIP42C porque estos
transistores son sencillos, baratos y además resisten voltajes de hasta 100 V.
El diseño de los amplificadores es el que se muestra en la figura 27.
+ r u1
~~ • <Y_. ------········I ~,
T'. T!P41 (J; TIP41C
_f~~~-¡ 1~ ' i .>~ ··----¡ ..
=V23V
T2TIP42C
-· --•--=
+ f U2
··•····-·······
R5 8.9!< ' ..... ···············································································-·····-'\/'-l'v-
Figura 27 Diseño del amplificador
Estos amplificadores funcionaron satisfactoriamente cuando se tenía la fuente de 30 V y
también tuvieron un excelente desempeño cuando se ocuparon con la fuente de mayor voltaje.
El arreglo de las resistencias se armo de tal forma que la ganancia de cada uno de los
amplificadores era de 9.81 y 9.83 respectivamente.
Otra razón importante del uso de transistores es la gran cantidad de corriente que pueden
entregar, cualidad muy importante porque los motores demandan una cantidad considerable
de corriente, la cual el LM675 no podía entregamos por sí solo.
Instrumentación de las entradas
Como se menciono antes, las entradas deben de tener voltajes que estén entre los O V y los 10 V,
debido a que este es el rango en el cual trabajan las tarjetas de adquisición de datos del
laboratorio. Las señales de los sensores varían entre los O Vy los 600 mV, cuando se les alimenta
con 50 V a los motores por lo tanto requieren de una amplificación. Es importante decir que otra
26

razón para amplificar la señal de los sensores se debe a que una amplificación de cualquier
señal permite mayor resolución de la señal y por ende una mejor lectura.
Por lo tanto se ocuparon 4 circuitos integrados del tipo LM741 que son amplificadores
comerciales de uso general. Estos circuitos requieren de una alimentación con voltaje tanto
positivo y negativo porque si no se les conectan ambos voltajes tienen el mismo problema que el
LM675 y fallan cuando sólo tienen una alimentación. Por lo tanto antes de diseñar los
amplificadores teníamos que diseñar y construir otra fuente de voltaje.
El LM741 puede soportar voltajes de alimentación de ±18 V pero como la tarjeta puede recibir
hasta 10 V decidimos que la fuente satisfacía las necesidades si se tenían ±12 V. Las razones para
ocupar este voltaje es que, primero, se tiene un rango extra superior a los 10 V para evitar que el
op-amp se sature cuando se le demanden los 10 V y también porque el sistema lleva un
ventilador que evita que toda la circuitería se caliente y pueda ocasionar fallas, este ventilador
funciona precisamente con 12 V, por esto se eligió ese voltaje. La fuente que se implemento tiene
este diseño.
7815 4001
-~1-----------+IN our-1 ___ +_L-:::;,. +15V
~ ~ j''__j j G~D j 1 lOCrnA MAX
~~~- .·------·--1+-1000,F +I¡, -·--*ii·---1~~: _____ , '\;'l.7.
1 l '
• 4001 lOOOuF l -1+
1 T 1 -e' '°"'
.___ __ ___.. __ j rN~'l,ur! e:_:.>· -15v
· · lOOmA MAX 7915
Figura 28 Diseño de la fuente de 12V
Esta diseño se implemento y funciono un poco diferente a los esperado porque da voltajes de
13.8 V en la parte positiva y -13.5 V en la parte negativa, pero esto no nos afecta en lo más
mínimo porque los amplificadores soportan voltajes superiores sin ningún problema.
Una vez que funciono la fuente de voltaje se procedió a implementar los circuitos LM741, para
ello se tomo la determinación de asignarles una ganancia de 15 a tres de los op-amps y el cuarto
con una ganancia de 4. Los primeros tres tienen ganancia de 15 para que cuando los motores
trabajen al máximo de 50 volts y los sensores tengan 600 m V de salida, la tarjeta reciba 10 V
después de amplificarla. El cuarto op-amp tiene ganancia de 5 porque de manera natural el
sensor de posición trabaja en un rango de O a 2 V, pero se le da esta ganancia para que pueda
tener un rango de funcionamiento de O a 10 V al igual que las otras entradas. La lectura de O V a
27

2 V por si sola podría ser suficiente para que la reciba la tarjeta de adquisición, pero corno se
dijo antes, una amplificación permite una mejor resolución de la señal. Corno ya se había
propuesto, los amplificadores están en configuración no inversora, porque no tenernos
problemas de inestabilidad por frecuencias y además porque los voltajes de entrada y de salida
siempre deben ser positivos.
Tabla con circuito impreso y acondicionamiento del cableado.
Para lograr que el prototipo funcione de una manera optima, se requiere que las partes antes
mencionadas estén agrupadas en una sola placa y también se necesita que los todos los cables
que se le tienen que agregar queden de una forma sencilla, segura y fácil para poder hacer las
conexiones y desconexiones de la mejor manera.
Para esto se procedió en primer lugar, al diseño de las pistas por medio de TraxMaker un
programa del Circuit Maker que permite hacer este trabajo de forma ordenada y simple. El
diseño que elegimos para nuestra circuitería se muestra en la figura 29.
·~ ¿, . l~
•
•
Figura 29 Diseño del circuito impreso en TraxMaker.
Una vez que se tenía el diseño, se traspaso el diseño a una placa de baquelita para poder hacer
el circuito ñsico, pero como las pistas estaban muy delgadas y hay partes del circuito que
requieren de bastante corriente se decidió ocupar el diseño como base y a partir de ahí hacer
nosotros mismos las pistas para que quedaran más gruesas y de esta manera garantizar el
perfecto funcionamiento del circuito. Cuando se termino de hacer el circuito se le soldaron
todos los componentes y se le agregaron las entradas y salidas que requiere el sistema,
quedándonos un circuito final como se muestra en la figura 30.
28

Figura 30 Placa terminada
29

Funciones de transferencia
Para determinar la función de transferencia de los motores se ocuparan los sensores que están
conectados a las flechas de los motores.
El procedimiento que se ocupa para obtener una función aproximada es el siguiente:
• Se conecta una entrada escalón de 15 volts al sistema.
• Se obtienen las gráficas de los sensores por medio de un osciloscopio.
• Del comportamiento de la gráfica se determina el orden de la función.
• En base al orden de la función se determina el modelo que mejor se ajuste a la gráfica.
• Se obtiene la función de transferencia aproximada.
Para el Motor 1
M Pos: o.ooos
Figura 31 Función del Motor 1 Entrada de 15 Volts
En base a la Figura 33, que muestra la gráfica del sensor conectado al motor 1, se determina que
la función de transferencia es de primer orden.
30
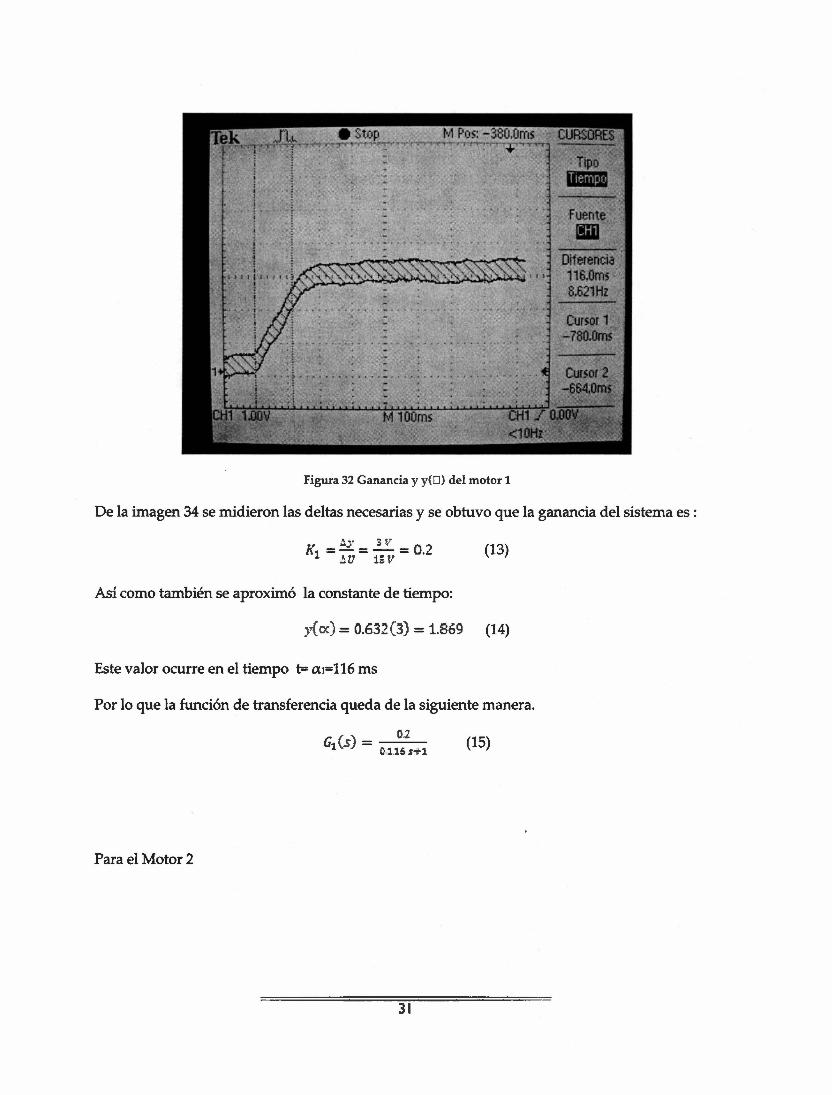
Figura 32 Ganancia y y(D) del motor 1
De la imagen 34 se midieron las deltas necesarias y se obtuvo que la ganancia del sistema es:
-'l .. - ... r _·
K =::.::..=...:...::...=O 'J 1 ::,v ii ' ·-
Así corno también se aproximó la constante de tiempo:
(13)
y{o:) = 0.632 (3) = 1.869 (14)
Este valor ocurre en el tiempo t= ai=116 rns
Por lo que la función de transferencia queda de la siguiente manera.
G ( s) = :: 1 '· 0 11'-e .... ¡ :t . o - .. (15)
Para el Motor 2
31
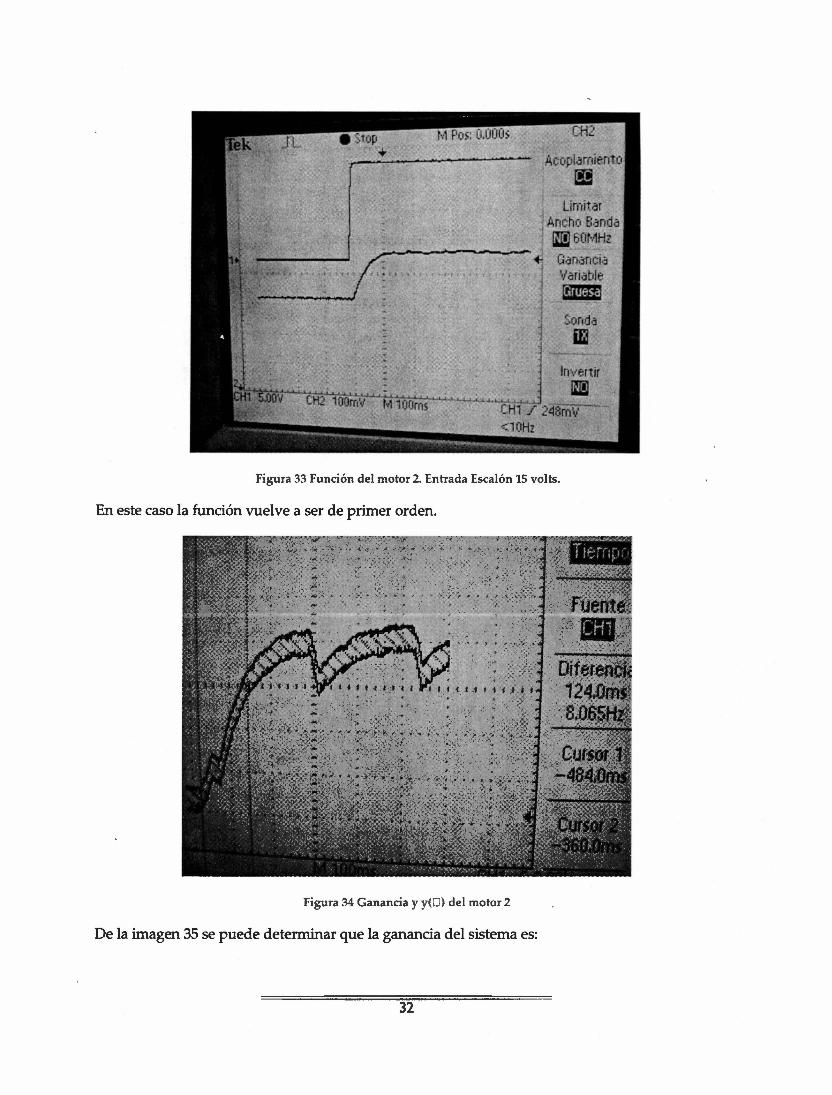
Figura 33 Función del motor 2. Entrada Escalón 15 volts.
En este caso la función vuelve a ser de primer orden.
Figura 34 Ganancia y y(O) del motor 2
De la imagen 35 se puede determinar que la ganancia del sistema es:
32
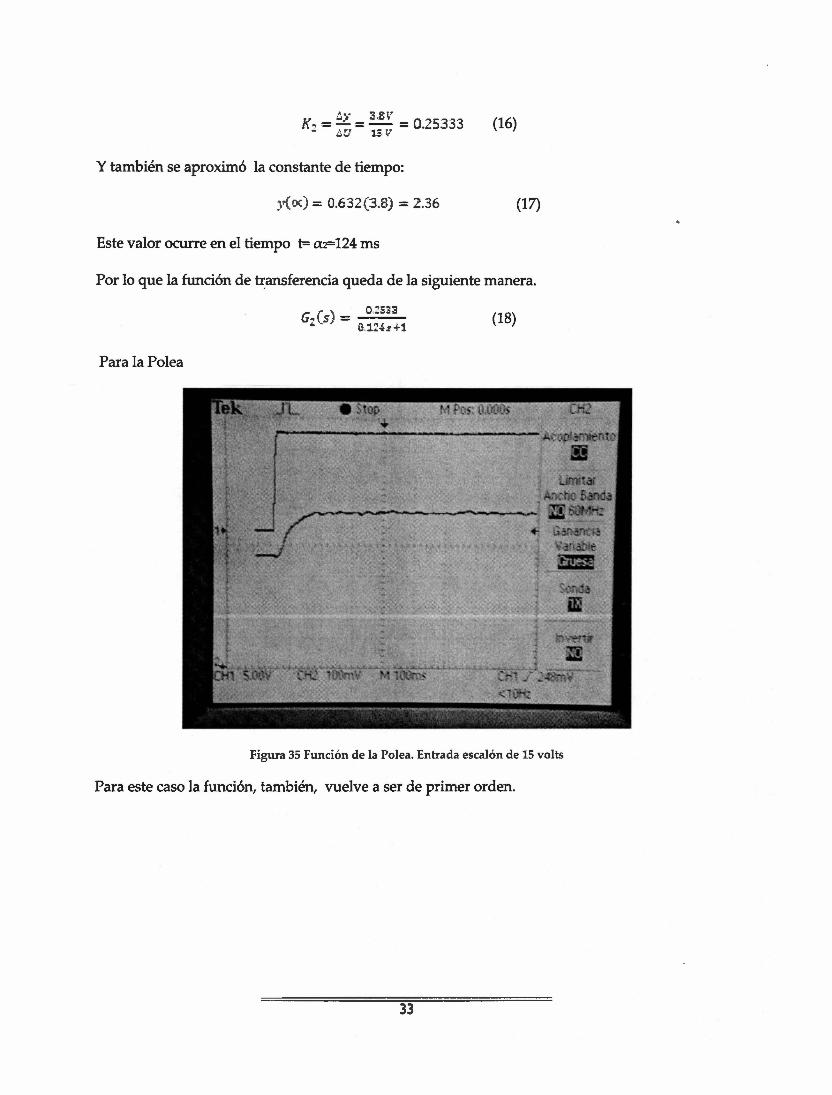
K: = !~~ = ~:: = 0.25333 (16)
Y también se aproximó la constante de tiempo:
y ( cx) = 0.632 (3.8) = 2.36 (17)
Este valor ocurre en el tiempo t= ru=124 ms
Por lo que la función de ti:ansferencia queda de la siguiente manera.
Para la Polea
G: (s) = _o._2s_3_:3_ ,l:4s+1
(18)
Figura 35 Función de la Polea. Entrada escalón de 15 volts
Para este caso la función, también, vuelve a ser de primer orden.
33

Figura 36 Ganancia y y(D) del motor 3
De la imagen 38 puede determinar que la ganancia del sistema es:
K~ =~y= :3 .GV = 0.24 (19) .:, .!U 1S '
Y la constante de tiempo, también se ve de la misma foto:
. -(oc) = 0.632 (3.ó) = 2.24 (20)
Este valor ocurre en el tiempo t=m=56 ms
Por lo que la función de transferencia queda de la siguiente manera.
0.2~ G~ (s) = --
~ O.OS6s + 1 (20)
En base a estos datos se procede a la realización de los controladores.
Se tiene una función aproximada de la forma
G(s ) =
Controladores
.:l.y/ !:, ;.¡
il:$7 1 (21)
Para la obtención de los controladores se ocupó la siguiente metodología:
34

• Se proponen ciertas especificaciones para su comportamiento
• Se propone un controlador de acuerdo a las especificaciones
• Se obtienen los parámetros del controlador PI
• Se diseña el controlador PI
• Se simulan los controladores.
En un principio se propone un controlador de segundo grado del tipo:
(22)
Las especificaciones para este controlador son:
Mp=lO % y ts que sea de 3 veces nuestra constante de tiempo en este caso de 0.348 s
De estos datos se obtiene que:
-r;1t/
M -e / J1-r;2 p-
t; = 1+ ;2 2 [ ]
-½ In Mp
El coeficiente de amortiguamiento(~) es de 0.5911
Yen base a:
(23)
(24)
La frecuencia natural (wn) del sistema es de 22.36 rad/s aproximadamente
Por lo que el controlador queda así:
(25)
Estos valores se ocuparán más adelante pero por ahora nos ocuparemos del controlador PI que
se va a diseñar.
El controlador PI que se está proponiendo tiene la estructura que se muestra a continuación:
35
:11i;:.1
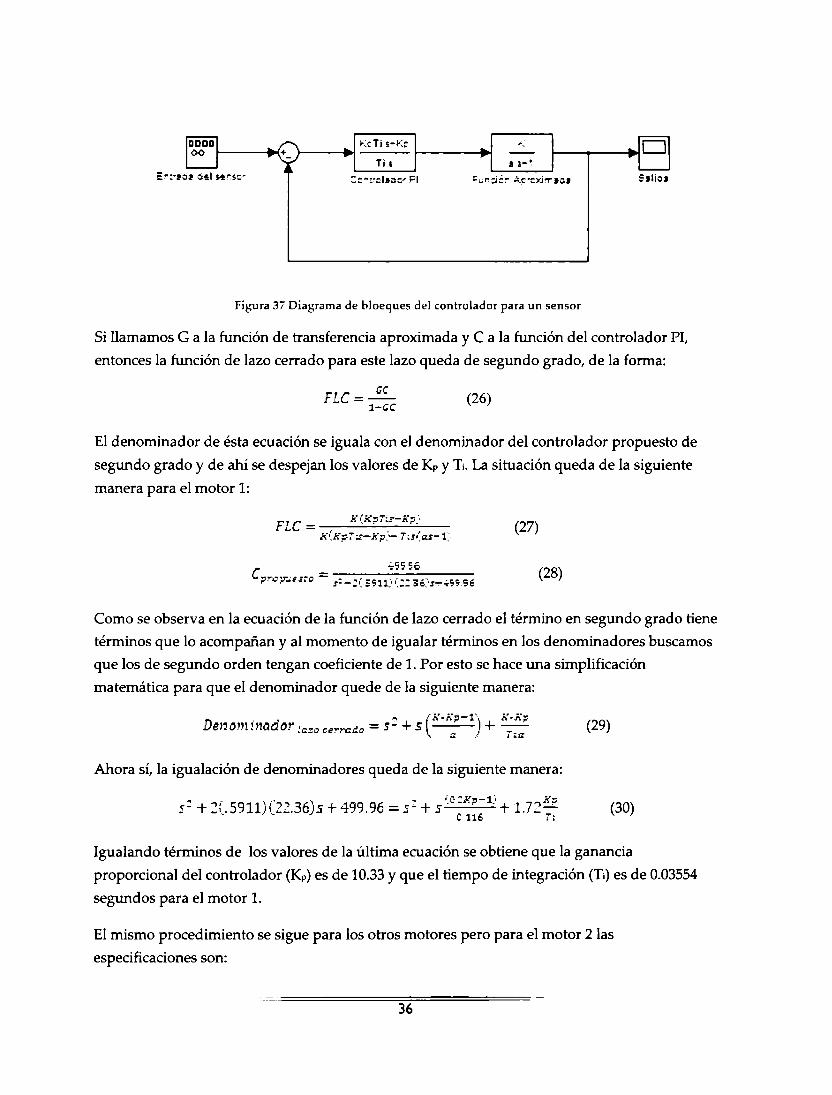
Figura 37 Diagrama de hloeques del controlador para un sensor
Si llamamos G a la función de transferencia aproximada y C a la función del controlador PI,
entonces la función de lazo cerrado para este lazo queda de segundo grado, de la forma:
FLC = ~, 1-GC
(26)
El denominador de ésta ecuación se iguala con el denominador del controlador propuesto de
segundo grado y de ahí se despejan los valores de Kp y T;. La situación queda de la siguiente
manera para el motor 1:
f l r _ l<'t'.K;;T;s .... Kp'.'·
""''- - J( 1:~:;,7;.s-Jlp_'•- T;s,:.::s-1~·= (27)
(28)
Como se observa en la ecuación de la función de lazo cerrado el término en segundo grado tiene
términos que lo acompañan y al momento de igualar términos en los denominadores buscamos
que los de segundo orden tengan coeficiente de 1. Por esto se hace una simplificación
matemática para que el denominador quede de la siguiente manera:
~ ('K·K~-1' K-K~ Denominador !azo c,n-rc.c.o = S"" + s ~ ) + ~-a'
.... . J. (29)
Ahora sí, la igualación de denominadores queda de la siguiente manera:
s= + 2(. 5911)(22.36)s + 499.96 = s= + s ,_o:R-;,-l) + l.72K;; (30) - - e 116 ,;
Igualando términos de los valores de la última ecuación se obtiene que la ganancia
proporcional del controlador (Kp) es de 10.33 y que el tiempo de integración (T;) es de 0.03554
segundos para el motor 1.
El mismo procedimiento se sigue para los otros motores pero para el motor 2 las
especificaciones son:
36

Mp=lO % y ts=.372 s
Y por lo tanto los valores de t, es de 0.5911 y el valor de wn es de 20.91 rad/segundo
Sustituyendo estos valores en las ecuaciones 28, 29 y 30 quedan de la siguiente manera
+37,63 C;,ro;,:.:1:S:-o = s: + ..,,. 5911~ ' 70 91', + 4~7 6~ -\• ) \- . )- " . "
_ • , ,,0.2533Kp + 1 0.2533Kp Denominaaor,--o--1:•·..-~.:.c· = s- +s(-----) + ----
-~- - -·- \ 0.12+ , 0.12+Ti
: . .,..- __ , r-, ) _ _ : (0.2533Kp + 1) 7
K¡, s + _,_. 5911),_~0.91 s + 437.63 - s + s O p
4 + 2.0+--:;:-:;:-
• - J ..
Y los valores de Kr y Ti son de 8.1533 y de 0.038 segundos respectivamente.
Actividades en Lab View En Lab View se realizo un programa que lee el voltaje que se envía del sensor y que además
envía voltaje al amplificador operacional.
Para la lectura y envio de los respectivos voltajes se requiere de la tarjeta de adquisición de
datos que se conecto de la siguiente forma:
37

Motor
I
Figura 38 Muestra un esquema de las conexiones entre los dispositivos
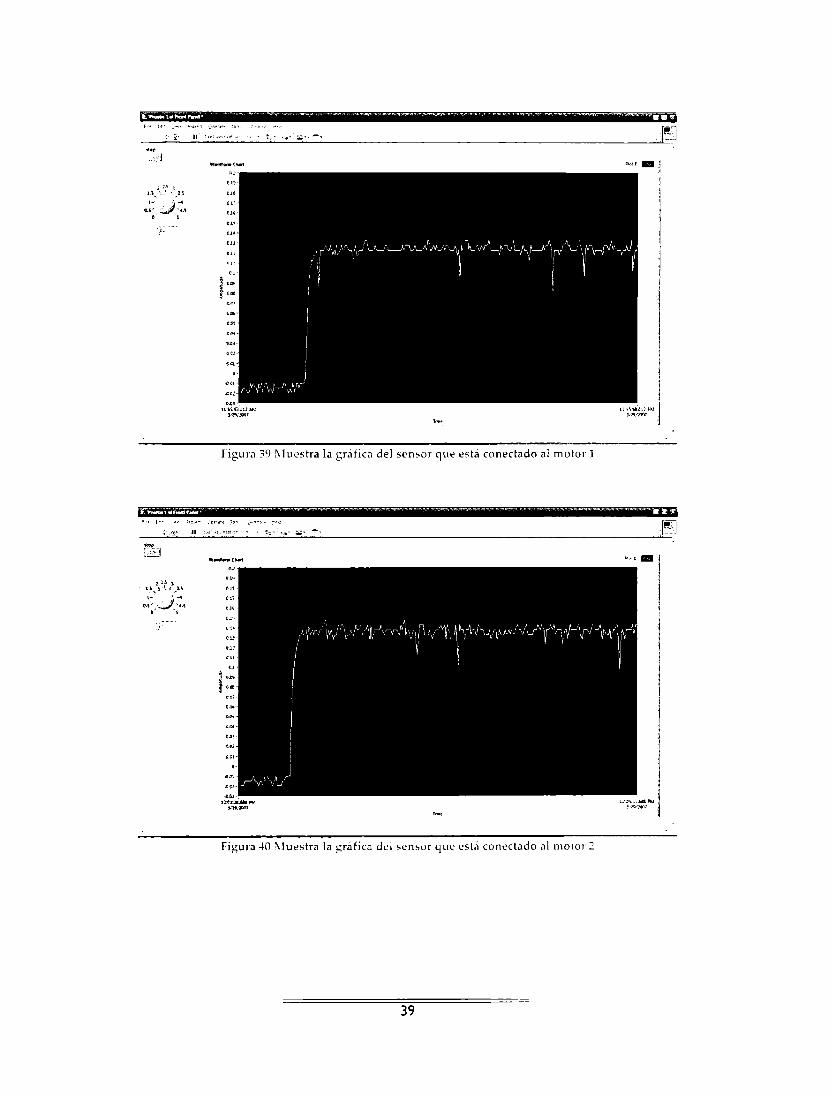
Un ejemplo de las lecturas que se hacen con LabView son las gráficas que se obtienen de los
sensores cuando ya se le han agregado los filtros. De la Figura 39 a la 41 se muestran las gráficas
obtenidas en LabView de los sensores 1,2 y 3, respectivamente, con su respectivo filtro.
38
-~· 11 ~;;. ... • ;¡;,.,
Figura :,q l\lucstra la gráfic;:i del sensor que está conectado al motor 1
Figura 40 ,\luestra la gráfic.:i del sensor que está conectado al motor 2
39
;!:!J
l).',.)
l.S .. ',t.~ ~J.!
~~: J~, e 1
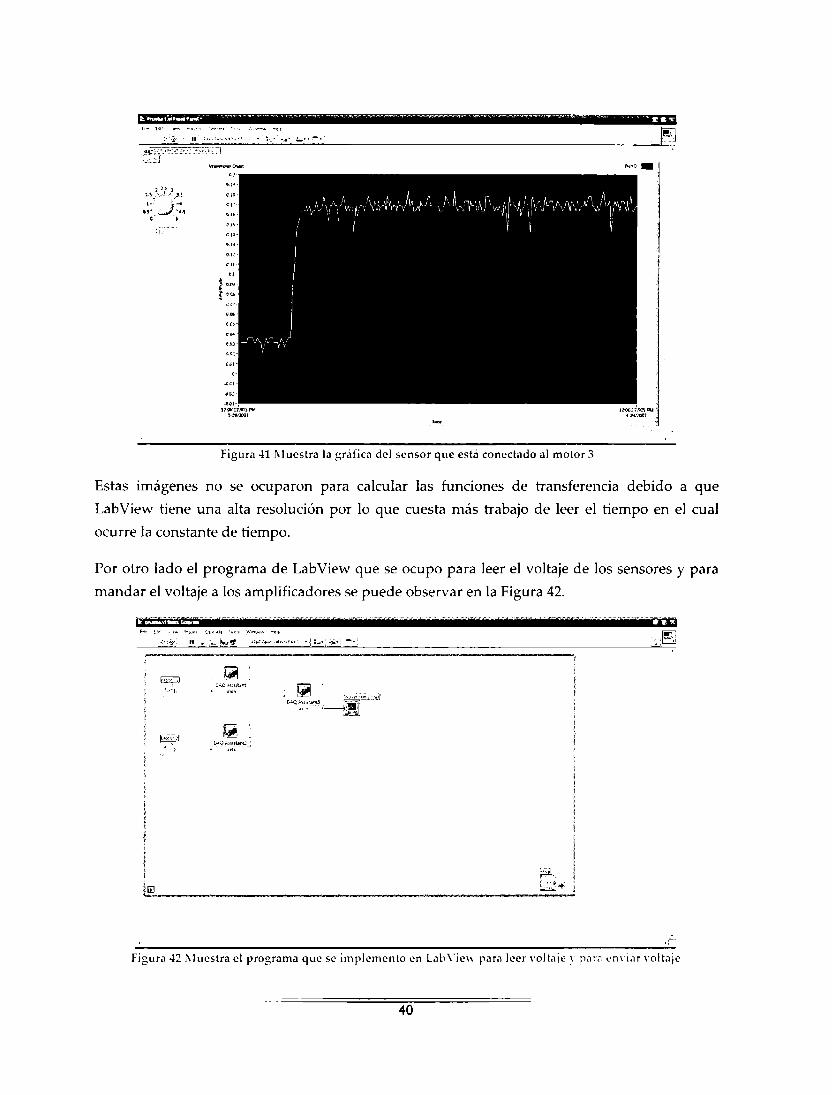
·-Figura 411\luestra la gráfica del sensor que está conectado al motor 3
Estas imágenes no se ocuparon para calcular las funciones de transferencia debido a que
LabView tiene una alta resolución por lo que cuesta más trabajo de leer el tiempo en el cual
ocurre la constante de tiempo.
Por otro lado el programa de LabView que se ocupo para leer el voltaje de los sensores y para
mandar el voltaje a los amplificadores se puede observar en la Figura 42 .
·~ r r ., ..... , ....
~ •.:.1·
~ ~:
•. I·
~ ~;.._ _____________________________ i_·_:~_ ... _;_
' ~ '.w
Figura 42 '\luestra el programa que se implemento en L1h\'iew par;i leer \·olt;ije \ p,HJ L'm·i;ir \'Oltaje
40
Corno se ve es un programa muy sencillo pero para las especificaciones del sistema es
suficiente, pues cumple con los requisitos que se piden.
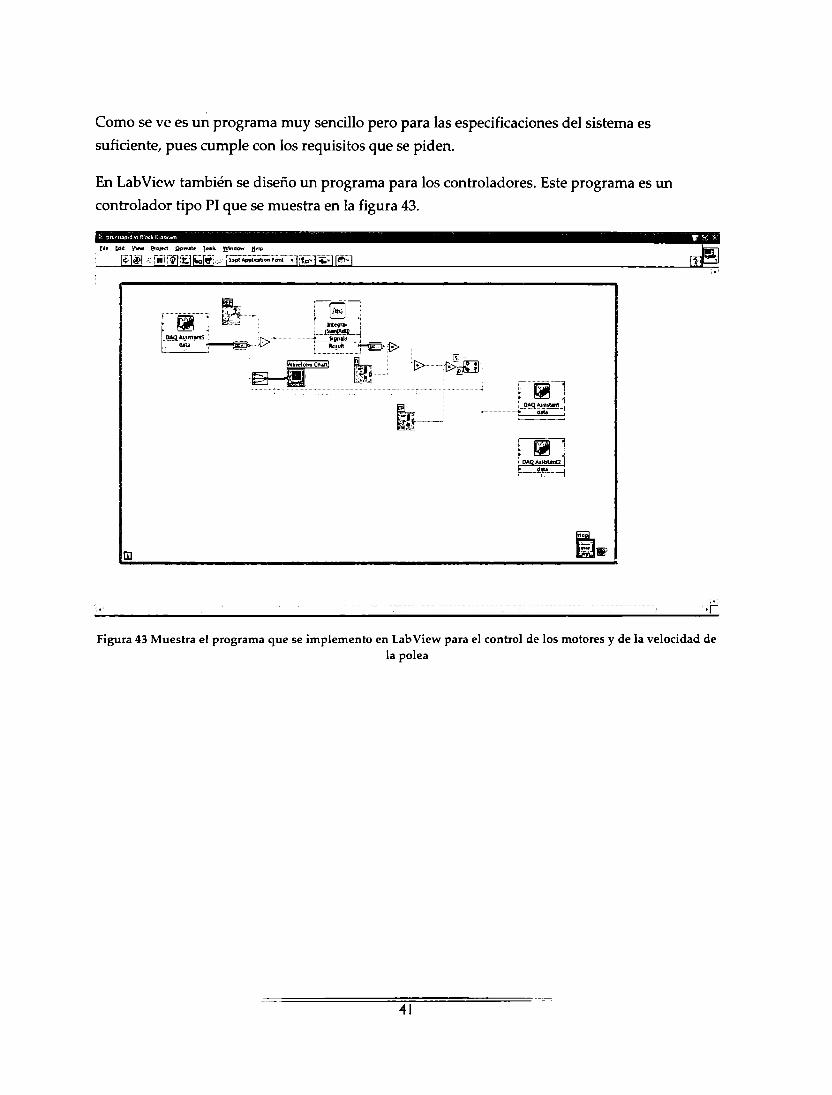
En LabView también se diseño un programa para los controladores. Este programa es un
controlador tipo PI que se muestra en la figura 43.
,-·· . ·-·1 ; ~ .t
.................... ~-~-::~~-j
m
•1
Figura 43 Muestra el programa que se implemento en LabView para el control de los motores y de la velocidad de la polea
41

filt td,1 l'.1t,.. e,,"JH; Qc,mall! l<ioh }:'.{m~Qv,r !:'ti¡,
-~: @1 ,H ¡ ~jritA.pp11ca1,,:,nFonl .·: fe• ¡r~·~:r:!j:• · ~-~ .. ~ 11. 1i
RotO - ,
"" U, ?
1, ). 1 _l.5
0,5./ . .;}_~J o~ ~ ].s
1P 1,
Figura 44 \luestr;i el comport;imiento de la ~eñal de control y de la señal de la polea
Como se muestra en la figura 44, la señal de color verde es la señal de control y la señal de color
rojo es la señal que se recibe de la polea, se nota claramente que cuando mete una perturbación
en la señal de entrada, la señal de control tiende a modificarse para poder hacer que el sistema
alcance a la señal de referencia, lo que muestra que el control funciona de manera optima.
Diagrama y Tabla de Conexiones Finales
Como ayuda para los trabajos futuros que se puedan presentar se deja este diagrama para
evitar confusiones o problemas con el extenso cableado de la maquina.
42
Figura 44 Diagram;i de conexione,; en le circuito integrado
43
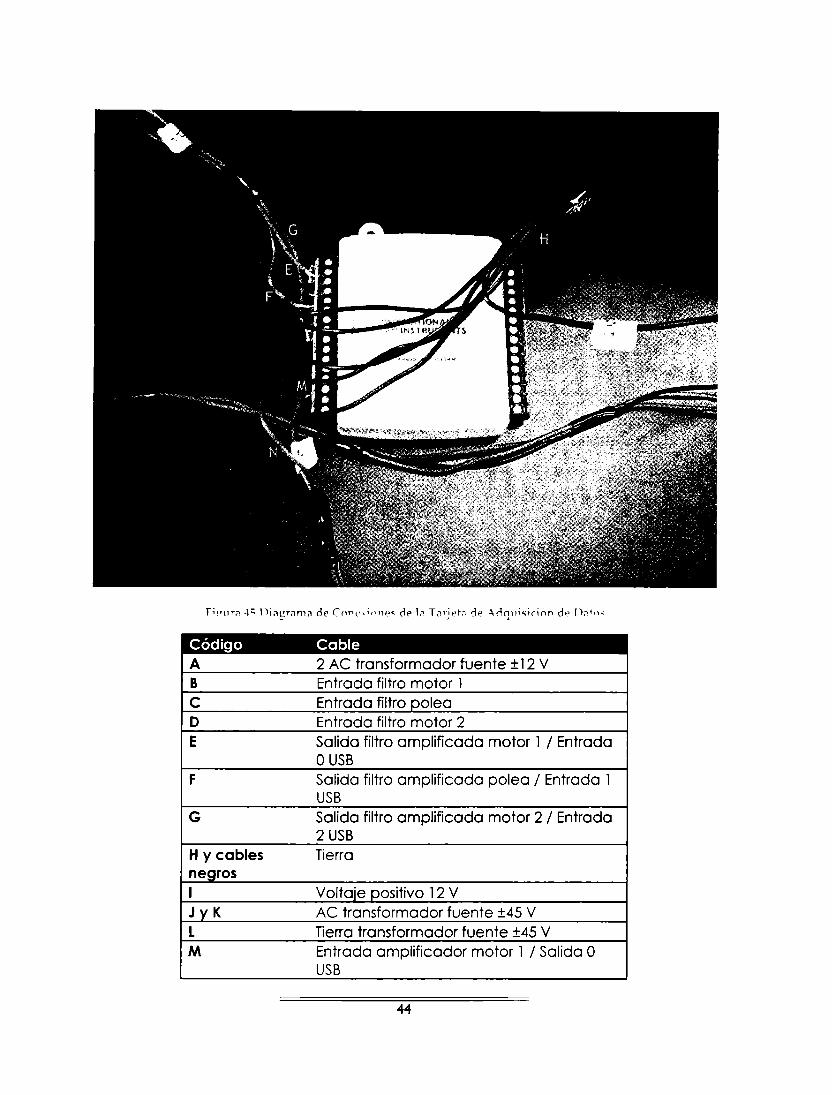
Código Cable A 2 AC transformador fuente ± 12 V B Entrada filtro motor 1 c Entrada filtro polea D Entrada filtro motor 2 E Salida filtro amplificada motor 1 / Entrada
O USB F Salida filtro amplificada polea / Entrada 1
USB G Salida filtro amplificada motor 2 / Entrada
2 USB H y cables Tierra negros 1 Voltaje positivo 1 2 V JyK AC transformador fuente ±45 V L Tierra transformador fuente ±45 V M Entrada amplificador motor 1 / Salida O
USB
44
N Entrada amplificador motor 2 / Salida 1 USB
p Voltaje motor 1 Q Voltaje motor 2
Tabla 1 Relación de conexiones de las figuras 44 y 45
Conclusiones y trabajo futuro
Conclusiones A pesar de que el equipo con el que trabajarnos no esta tan bien terminado y sobre todo no esta
bien hecho, hemos empezado a realizar pruebas importantes para poder comprender el
funcionamiento de las poleas de la maquina.
El sistema de control de una máquina no es tan sencillo de hacer porque antes se requiere saber
las funciones de transferencia de las poleas que a su vez no son tarea fácil.
La comunicación con nuestro asesor ha sido muy buena, lo cual ha facilitado el trabajo y
además siempre se ha mostrado cooperativo con las dudas de nuestro proyecto.
Aunque los avances no han sido grandes hemos ido resolviendo problemas del funcionamiento
de la máquina porque corno ya comentarnos hemos tenido problemas para realizar las pruebas.
Trabajo futuro • Configurar el sensor para poderlo instrumentar en la máquina. • Añadir las partes posibles a un circuito fijo. • Modificar el acrílico
Actividades realizadas • Ajustar la máquina de manera que funcione correctamente en la parte mecánica
• Obtención del modelo de la función de transferencia de cada una de las poleas
• Diseño y Construcción del filtro de cada una de las señales provenientes de las poleas
• Diseño e implementación de la fuente de voltaje.
• Diseño e implementación del Amplificador
• Reuniones con el asesor
45

Referencias • Boylestad, Robert and Louis Nashelsky. Electronic Devices and Circuit Theory.
Englewood Cliffs: Prentice Hall, 2002.
• Femández del Busto, Ricardo. Apuntes de control digital. "Identificación de sistemas".
• Ogata, Katsuhiko. Discrete-Time Control Systems. Englewood Cliffs: : Prentice-Hall,
1995.
• Ogata, Katsuhiko. Modem Control Engineering. Englewood Cliffs: Prentice Hall, 2002.
• Hayt, William. Engineering Circuit Analysis with Replacement CD-Rom. City: McGraw
Hill Education, 2002.
• http://www.tecquip.com/TQ%20PRODUCT%20AREAS/TQCONTR0L/CE108/%21ce108
.htm
46
1bjetivo
ealizar la parte eléctrica de potencia de la ráquina para posteriormente hacer el 6eño del control electrónico de la velocid y la instrumentación total de una má
~ina de motores acoplados. La máquina ,nsta de dos motores de DC y tres rodillos ra mantener una tensión adecuada en la -nda continua que hay entre los rodillos.
nciona miento
ando se tiene una banda que pasa por ..; poleas el valor de la tensión es O. Esto puede afirmar dado que las velocidades
.;¡ulares en las poleas son las mismas y - lo tanto, en la banda el valor de dicha ,,sión es O. Contrariamente, cuando las ocidades angulares de las poleas son ~rentes la banda tiende a estirarse o a Jjarse. Es decir, pierde o gana velocidad ?al debido a que la tensión en la banda es -1ue proporciona la velocidad de la misma. este fenómeno el que se controló.
Eléctrica
Se realizó una fuente de poder de ±30 V y una de ±12 V. De la misma manera, se construyeron dos amplificadores operacionales con transistores para amplificar los voltajes de salida de la tarjeta USB de adquisición de datos de NI. Además se amplificó la señal de las cuatro entradas del sistema y por último, se dejó instrumentado el sensor de posición.
Control
.'i ¡
í )
Se diseñaron los controladores PI para los dos motores que regulan la velocidad y se realizó el programa correspondiente en LabView a fin de gobernar el sistema de control de la máquina .
Conclusiones
La máquina funciona de manera independiente sin necesidad de utilizar una fuente externa. Está instrumentada de manera tal, que recibe voltajes de O a 10 V y manda voltajes de O a 5 V. Es a través de dichas señales que trabaja la tarjeta de adquisición de datos. Por lo anterior, la máquina puede ser operada desde cualquier computadora · con una interfaz en LabView. Faltando únicamente la implementción de los controladores