influencia de los parámetros de diseño en el espacio de ... · dentro del espacio de trabajo de...
TRANSCRIPT

AVANCES Investigación en Ingeniería Vol. 8 - No. 2 (2011) 49
Influencia de los parámetros de diseño en el espacio de trabajo de un mecanismo paralelo planar 3RRR
Daniel Ramirez1*, Jorge García**, Ubaldo García***, Jaime Cortés****
Andrés Cifuentes*****, Santiago Rodríguez ******
1 Universidad Santo Tomás. *[email protected]**[email protected], ***[email protected], ****[email protected],
*****[email protected], ******[email protected]
Resumen
Se muestra el procedimiento realizado para el análisis cualitativo de la distribución de la destreza dentro del espacio de trabajo de un manipulador paralelo planar 3RRR. Utilizando la cinemática inversa, el Jacobiano del manipulador y el concepto de destreza, se elaboró en MATLAB una herramienta para facilitar la visualización del movimiento del mecanismo y su espacio de trabajo. La herramienta se utilizó para observar el comportamiento de este al modificar los valores de los parámetros de diseño. Se pretende con esto ayudar a entender el problema del diseño conceptual y generar criterios para el posterior planteamiento de una herramienta matemática que permita determinar la configuración óptima del mecanismo para una tarea específica.
Palabras clave
Mecanismo paralelo, espacio de trabajo, robótica, robots paralelos.
Abstract
The process for the qualitative analysis of the dexterity distribution within 3RRR parallel manipulator is described. Inverse kinematics, Jacobian matrix, and dexterity concept are used for to make a MATLAB tool and to make the movement and workspace of the platform easier to display. The computational tool was used
Fecha de recepción del artículo: 1/6/2011 Fecha de aceptación del artículo: 1/7/2011
to see the workspace behavior when the design parameters are modified. The goal is to help to understand the conceptual design and to generate criterion for the development of a mathematic tool to optimize the mechanisms.
Keywords
Parallel mechanism, workspace, robotics, parallel robots.
Introducción
Los robot paralelos aunque no son muy conocidos, presentan una serie de ventajas sobre las configuraciones seriales, como mayor rigidez y mayor velocidad, lo que los hace atractivos para aplicaciones en las que se usan típicamente robots con configuración tipo serial [1]. Sin embargo, dentro de sus inconvenientes se cuenta que poseen un espacio de trabajo reducido y con singularidades incluidas en él, dificultando su diseño y funcionamiento.
Una plataforma paralela planar 3RRR está constituida por tres extremidades unidas desde la base a una placa móvil o efector final. Se denomina 3RRR porque posee tres extremidades con tres juntas de tipo rotacional, el actuador de cada extremidad se puede ubicar en la junta de la base, el efector final o en la intermedia [2]. Una de las etapas del diseño de estos mecanismos es la síntesis, en la que se establece las dimensiones de los componentes así como su

AVANCES Investigación en Ingeniería Vol. 8 - No. 2 (2011)50
ubicación. Como etapa previa se propone el análisis de la destreza dentro del espacio de trabajo en función de la variación de los parámetros de diseño.
Materiales y métodos
Cinemática inversa del manipulador
Uno de los primeros aspectos que se deben cubrir al momento de analizar el comportamiento de manipulador 3RRR es su cinemática inversa, es decir se debe encontrar la relación existente entre la posición del efector final y las posiciones de cada uno de los actuadores. Según se muestra en [3], para encontrar esta realción se debe considerar la Figura 1 en la que se muestra en forma simplificada la configuración del manipulador.
De la geometría de la figura 1 se observa que es posible escribir una ecuación de lazo cerrado para la primera extremidad:
(3) Expresando las componentes de la Ec. 3 respecto al marco de referencia fijo se tiene: (4)
Como el punto se encuentra en el origen, entonces y la Ec. (4) se puede reescribir como: (5)
Elevando al cuadrado y sumando las dos igualdades de la Ec. (5) se tiene:
(6)
Reorganizando los términos: (7)
Para facilitar el manejo algebraico se establecen algunas variables temporales:
(8)
Utilizando estas variables temporales en la Ec. (7), esta se puede reescribir: (9)
Utilizando las identidades:
(10)
La Ec. (9) se puede plantear como se muestra en la Ec.(11), esta, asu vez se muestra en la Ec. (12) después de reorganizar algunos términos:
Figura 1. Configuración del manipulador paralelo planar 3RRR.
La ubicación de la plataforma móvil de la figura 1 puede ser descrita en términos de la posición del punto A, y una orientación de ángulo q. Las coordenadas de los puntos B y C pueden ser escritas en términos de A y q así:
(1)
,
⁄ , ⁄
(2)
,
⁄ , ⁄

AVANCES Investigación en Ingeniería Vol. 8 - No. 2 (2011) 51
(11) (12)
Resolviendo esta ecuación cuadrática y utilizando la Ec. (10) y Ec. (8) se obtiene:
(13)
√
(14) √ ( )
El mismo procedimiento se puede realizar para la segunda extremidad. En este caso la ecuación de lazo cerrado se muestra en la Ec. (15), sus componentes en la Ec. (16) y la solución para en la Ec. (17). (15)
(16)
(17)
√ ( ) ( )
A su vez, para la extremidad 3 se tiene: (18)
(19)
√
Jacobiano del manipulador
El Jacobiano del manipulador permite no solo relacionar las velocidades de los actuadores con la del efector final, también es una herramienta para el análisis del comportamiento del manipulador en cuento a la precisión y la rigidez, aspectos de suma importancia en el diseño de este tipo de aplicaciones.
Para el caso particular del manipualdor 3RRR considérese de nuevo la Figura 1. De esta se puede
inferir para la primera extremidad una ecuación de lazo cerrado respecto al centro de la plataforma móvil: (20)
Si es la velocidad angular de la placa móvil, se puede relacionar la velocidad (del punto G en el centro de la placa móvil) y (del punto A correspondiente a la junta pasiva sobre una de las esquinas de la placa móvil):
(21) ( )
Por otro lado, la velocidad también se puede describir como:
(22) = + = × + × =
× + + ( × )
Igualando las Ec. (21) y (22): (23) ( ) ( ) ( )
Como representa la velocidad angular de la junta pasiva en el punto D (la cual no es de interés en este momento) se puede eliminar premultiplicando ambos lados de la Ec. (23) por :
(24) ( )
El lado izquierdo de la Ec. (24) se puede escribir con sus componentes:
(25) =
+ + ∅( − ) =
[ ( − )]
∅
0
∙0
+ ∅001
∙0
×
Realizando el mismo procedimiento para el lado derecho de la Ec. (24):

AVANCES Investigación en Ingeniería Vol. 8 - No. 2 (2011)52
(26)
[ − 0 0]
3
∙ ( × ) = − =
Si se sigue el mismo proceso para las demás extremidades los resultados se pueden agrupar como se muestra en la Ec. (27):
(27)
−
−
−
∅
=
− 0 0
0 − 0
0 0 −
Que a su vez se puede escribir en forma general como: (28)
Donde y representan las velocidades de la placa móvil y los actuadores respectivamente.
Aplicación del concepto de destreza
La Ec. (28) se puede reescribir como: (29)
Donde corresponde a la matriz Jacobiana del manipulador. Para evaluar el comportamiento del manipulador dentro del espacio de trabajo se utilizó el concepto de destreza local ( ) establecido en [4] y [5] como: (30)
En la Ec. (30) el término corresponde al número de condición de la matriz Jacobiana. Este valor de destreza se evalúa localmente en cada punto del espacio e indica que tanto se amplifican sobre el efector final los errores de posición y velocidad de los actuadores, también es un estimativo de que tan grandes deben ser las fuerzas en los actuadores respecto a la carga a vencer en el efector final y por tanto es también un estimativo de la rigidez del mecanismo.
Teniendo en cuenta que el valor del condicional puede variar entre 1 y , el valor de la destreza puede variar entre 0 y 1 siendo 1 el valor deseable, es decir, si la destreza es igual a 1 se podría decir que no hay amplificación de los errores en los actuadores sobre el efector final. Al contrario, si la destreza es igual a 0 en algún punto del espacio, significa que el manipulador podría ganar o perder un grado de libertad al llegar a este punto es decir, dicho punto sería una singularidad y en la región cercana a él variaciones pequeñas en la posición y velocidad de los actuadores implicarían grandes errores en el efector final. Igualmente, cerca a las singularidades la rigidez del mecanismo podría aumentar o disminuir severamente.
Elaboración de la herramienta computacional
Con el objeto de proporcionar una herramienta para facilitar el diseño de este tipo de plataformas, se establecieron los parámetros de necesarios para definir la configuración de una plataforma cualquiera: longitudes de las extremidades, ubicación de las juntas en la plataforma móvil, y ubicación de los actuadores. Estos parámetros generan 6 variables por acada extremidad, es decir 18 variables para todo el manipulador. Por esta razón, tal como se recomienda en [5] se parametrizó el diseño a través de algunas simplificaciones[3]. En primer lugar se asumió que las tres extremidades serían simétricas, por lo que las longitudes de los eslabones unidos a los actuadores serían iguales en las tres extremidades ( ) al igual que que los eslabones unidos a la placa móvil ( ) . En cuanto a la ubicación de las juntas pasivas en la placa móvil se asumió que estas se ubican en forma simétrica (a 120°) sobre una circunferencia de radio r, lo mismo se asumió para los actuadores, los cuales están contenidos en una circunferecnia de radio R. De esta forma se pasó de 18 a 4 parámetros como se observa en la Figura 2.
AVANCES Investigación en Ingeniería Vol. 8 - No. 2 (2011) 53
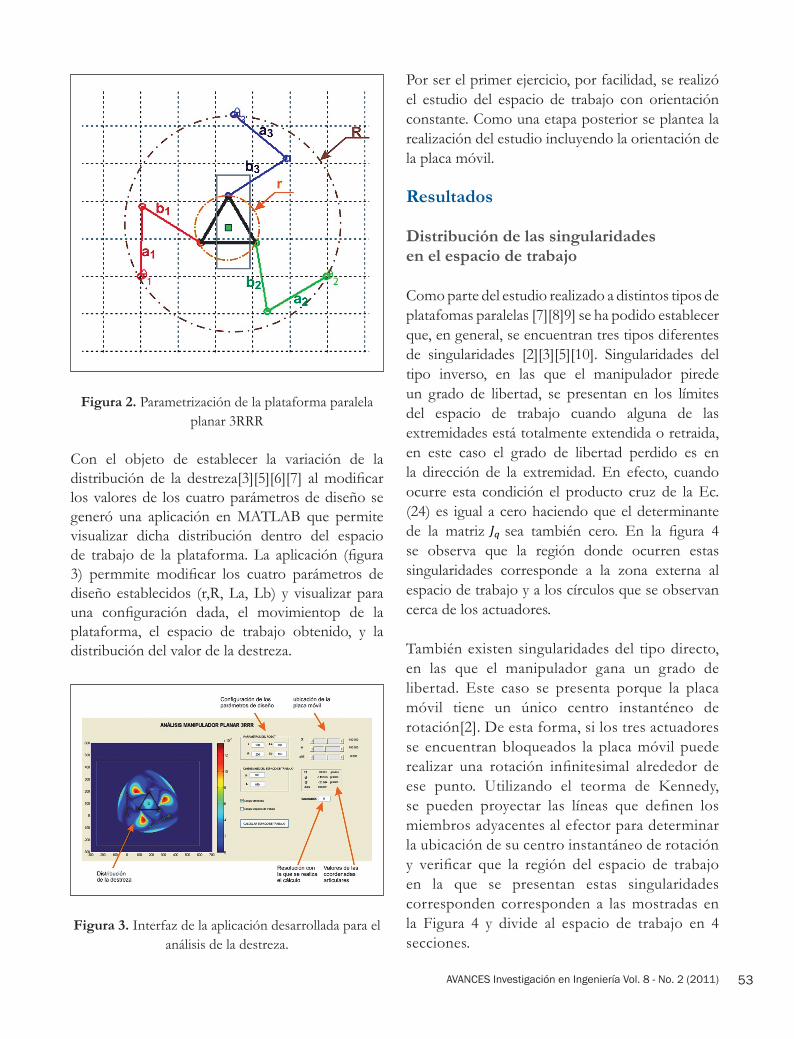
Figura 2. Parametrización de la plataforma paralela planar 3RRR
Con el objeto de establecer la variación de la distribución de la destreza[3][5][6][7] al modificar los valores de los cuatro parámetros de diseño se generó una aplicación en MATLAB que permite visualizar dicha distribución dentro del espacio de trabajo de la plataforma. La aplicación (figura 3) permmite modificar los cuatro parámetros de diseño establecidos (r,R, La, Lb) y visualizar para una configuración dada, el movimientop de la plataforma, el espacio de trabajo obtenido, y la distribución del valor de la destreza.
Por ser el primer ejercicio, por facilidad, se realizó el estudio del espacio de trabajo con orientación constante. Como una etapa posterior se plantea la realización del estudio incluyendo la orientación de la placa móvil.
Resultados
Distribución de las singularidadesen el espacio de trabajo
Como parte del estudio realizado a distintos tipos de platafomas paralelas [7][8]9] se ha podido establecer que, en general, se encuentran tres tipos diferentes de singularidades [2][3][5][10]. Singularidades del tipo inverso, en las que el manipulador pirede un grado de libertad, se presentan en los límites del espacio de trabajo cuando alguna de las extremidades está totalmente extendida o retraida, en este caso el grado de libertad perdido es en la dirección de la extremidad. En efecto, cuando ocurre esta condición el producto cruz de la Ec. (24) es igual a cero haciendo que el determinante de la matriz sea también cero. En la figura 4 se observa que la región donde ocurren estas singularidades corresponde a la zona externa al espacio de trabajo y a los círculos que se observan cerca de los actuadores.
También existen singularidades del tipo directo, en las que el manipulador gana un grado de libertad. Este caso se presenta porque la placa móvil tiene un único centro instanténeo de rotación[2]. De esta forma, si los tres actuadores se encuentran bloqueados la placa móvil puede realizar una rotación infinitesimal alrededor de ese punto. Utilizando el teorma de Kennedy, se pueden proyectar las líneas que definen los miembros adyacentes al efector para determinar la ubicación de su centro instantáneo de rotación y verificar que la región del espacio de trabajo en la que se presentan estas singularidades corresponden corresponden a las mostradas en la Figura 4 y divide al espacio de trabajo en 4 secciones.
Figura 3. Interfaz de la aplicación desarrollada para el análisis de la destreza.
AVANCES Investigación en Ingeniería Vol. 8 - No. 2 (2011)54
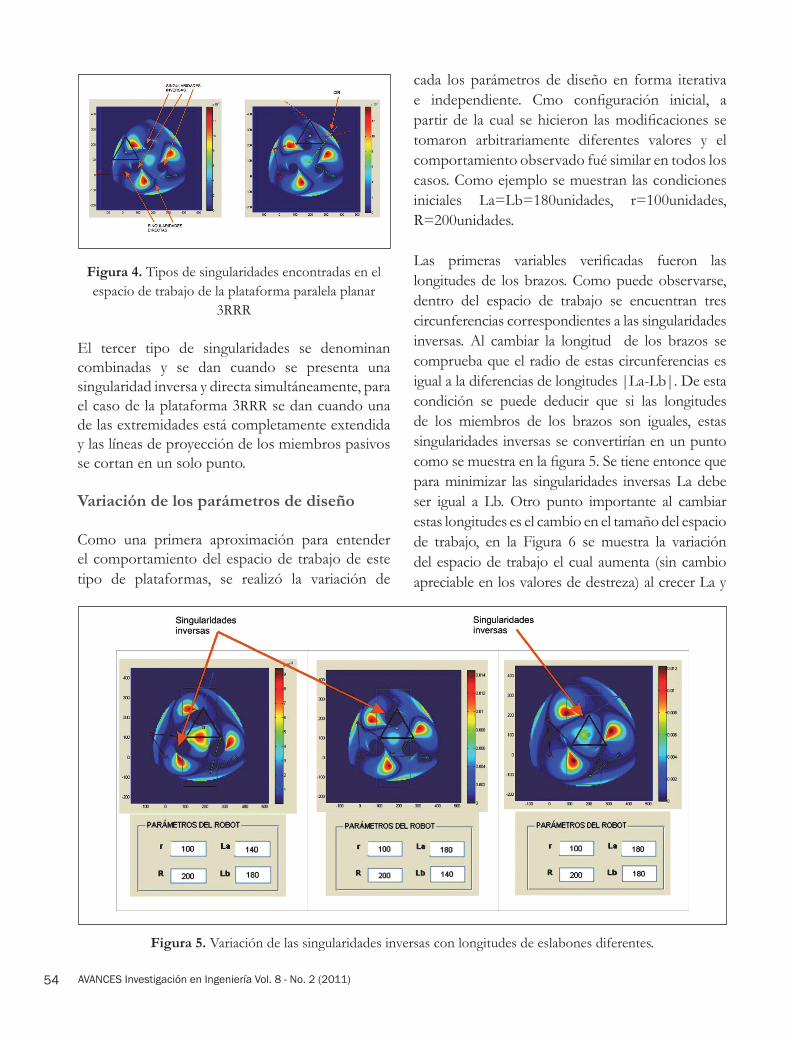
Figura 4. Tipos de singularidades encontradas en el espacio de trabajo de la plataforma paralela planar
3RRR
El tercer tipo de singularidades se denominan combinadas y se dan cuando se presenta una singularidad inversa y directa simultáneamente, para el caso de la plataforma 3RRR se dan cuando una de las extremidades está completamente extendida y las líneas de proyección de los miembros pasivos se cortan en un solo punto.
Variación de los parámetros de diseño
Como una primera aproximación para entender el comportamiento del espacio de trabajo de este tipo de plataformas, se realizó la variación de
Figura 5. Variación de las singularidades inversas con longitudes de eslabones diferentes.
cada los parámetros de diseño en forma iterativa e independiente. Cmo configuración inicial, a partir de la cual se hicieron las modificaciones se tomaron arbitrariamente diferentes valores y el comportamiento observado fué similar en todos los casos. Como ejemplo se muestran las condiciones iniciales La=Lb=180unidades, r=100unidades, R=200unidades.
Las primeras variables verificadas fueron las longitudes de los brazos. Como puede observarse, dentro del espacio de trabajo se encuentran tres circunferencias correspondientes a las singularidades inversas. Al cambiar la longitud de los brazos se comprueba que el radio de estas circunferencias es igual a la diferencias de longitudes |La-Lb|. De esta condición se puede deducir que si las longitudes de los miembros de los brazos son iguales, estas singularidades inversas se convertirían en un punto como se muestra en la figura 5. Se tiene entonce que para minimizar las singularidades inversas La debe ser igual a Lb. Otro punto importante al cambiar estas longitudes es el cambio en el tamaño del espacio de trabajo, en la Figura 6 se muestra la variación del espacio de trabajo el cual aumenta (sin cambio apreciable en los valores de destreza) al crecer La y

AVANCES Investigación en Ingeniería Vol. 8 - No. 2 (2011) 55
Figura 6. Variación del espacio de trabajo al modificar las longitudes de las extremidades.
Figura 7. Variación del espacio de trabajo al modificar el radio de la placa móvil
Lb, en este caso ambas longitudes son iguales y se modificaron simulatáneamente.
Por otro lado, se realizó el mismo ensayo variando la magnitud de r (radio de la placa móvil) del que se infiere que al aumentar r, el espacio de trabajo aumenta, las singularidades inversas no cambian de tamaño pero se ubican mas cerca del centro del mecanismo y el espacio de trabajo, en general se degenera (la destreza baja en todo el espacio de trabajo). Algunas de las pruebas realizadas se muestran en la Figura 7.
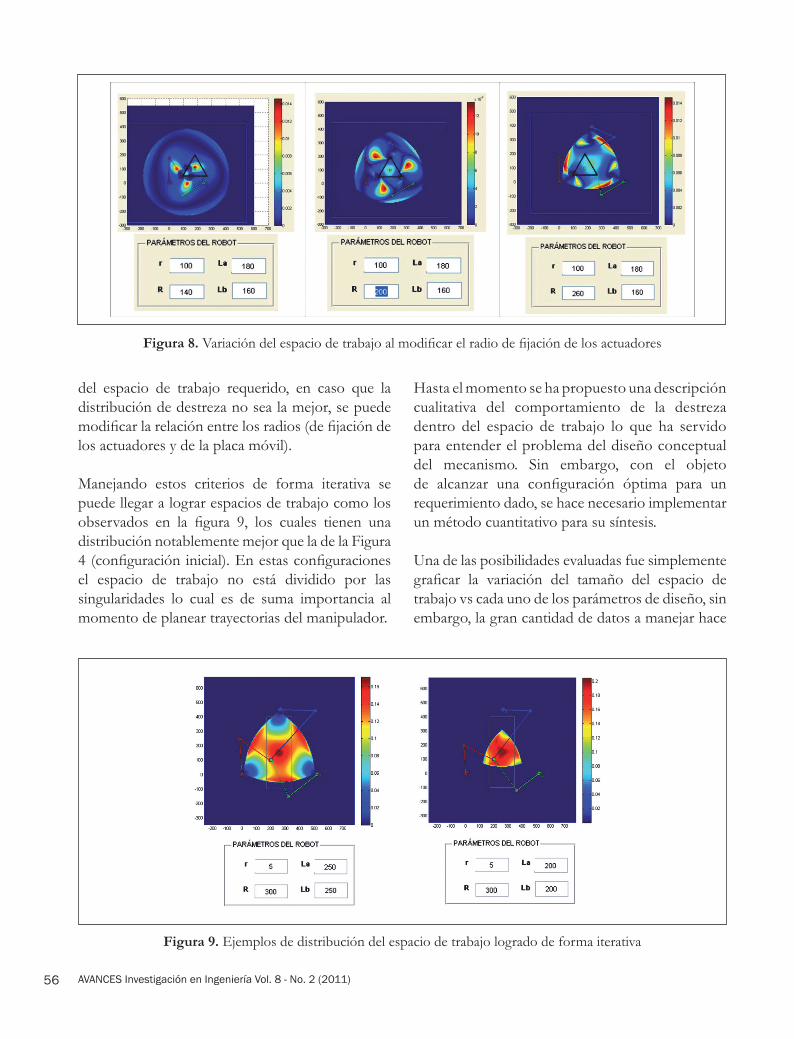
Por otro lado, contrario al comportamiento del radio de la placa móvil, se observa que al aumentar el radio de fijación de los actuadores (R) el espacio
de trabajo disminuye pero la distribución de la destreza dentro de este mejora notablemente como se puede observar en la Figura 8.
Discusión
Observando el comportamiento independiente de cada uno de los parámetros de diseño de este tipo de plataformas se puede establecer que para lograr una mejor configuración (con mejor distribución de destreza) la relación entre el radio de fijación de los actuadores y el radio de la placa móvil debe ser lo más grande posible.
Por otro lado, la longitud de las extremidades se podrá seleccionar dependiendo del tamaño
AVANCES Investigación en Ingeniería Vol. 8 - No. 2 (2011)56
del espacio de trabajo requerido, en caso que la distribución de destreza no sea la mejor, se puede modificar la relación entre los radios (de fijación de los actuadores y de la placa móvil).
Manejando estos criterios de forma iterativa se puede llegar a lograr espacios de trabajo como los observados en la figura 9, los cuales tienen una distribución notablemente mejor que la de la Figura 4 (configuración inicial). En estas configuraciones el espacio de trabajo no está dividido por las singularidades lo cual es de suma importancia al momento de planear trayectorias del manipulador.
Figura 8. Variación del espacio de trabajo al modificar el radio de fijación de los actuadores
Figura 9. Ejemplos de distribución del espacio de trabajo logrado de forma iterativa
Hasta el momento se ha propuesto una descripción cualitativa del comportamiento de la destreza dentro del espacio de trabajo lo que ha servido para entender el problema del diseño conceptual del mecanismo. Sin embargo, con el objeto de alcanzar una configuración óptima para un requerimiento dado, se hace necesario implementar un método cuantitativo para su síntesis.
Una de las posibilidades evaluadas fue simplemente graficar la variación del tamaño del espacio de trabajo vs cada uno de los parámetros de diseño, sin embargo, la gran cantidad de datos a manejar hace

AVANCES Investigación en Ingeniería Vol. 8 - No. 2 (2011) 57
que esta posibilidad sea poco práctica, por lo que se sugiere utilizar algún método de optimización como algoritmos genéticos los cuales ya han sido utilizados en otras plataformas con éxito.
Agradecimientos
El proyecto se realizó en los laboratorios de Ingeniería Mecánica de la Universidad Santo Tomás y se financió a través de la “Convocatoria interna para proyectos de investigación 2008-2009. El proyecto fue concebido por el grupo de investigación GEAMEC y desarrollado en colaboración con el estudiante de Ingeniería Mecánica Juan Carlos Lozano y los integrantes del semillero de investigación MAIR.
Referencias
1. B. Siciliano and O. Khatib, Springer handbook of robotics, Springer-Verlag New York Inc, 2008.
2. G. Yang and W.C.I.-ming Chen, “A Geometrical Method for the Singularity Analysis of 3-RRR Planar Parallel Robots with Different Actuation Schemes,” Analysis, 2002, pp. 2055-2060.
3. L. Tsai, Robot analysis: the mechanics of serial and parallel manipulators, John Wiley and Sons, 1999.
4. M. Cardona, “Algoritmo para la Solución de la Cinemática Directa de Robots Paralelos Planares 3RRR Destinados a Aplicaciones en Tiempo Real.,” uww.emcs.org, pp. 1-9.
5. J. Merlet, Parallel robots, Springer, 2006.
6. C.L. Collins, “Forward kinematics of planar parallel manipulators in the Clifford algebra of P 2,” Mechanism and Machine Theory, vol. 37, 2002, pp. 799-813.
7. J. Merlet and M. Clément, Others, “Workspaces of planar parallel manipulators,” Mechanism and Machine Theory, vol. 33, 1998, p. 7–20.
8. Z. Ji, “Study of planar three-degree-of-freedom 2-RRR parallel manipulators,” Mechanism and Machine Theory, vol. 38, May. 2003, pp. 409-416.
9. C.A. Jara, J.M. Sabater, J.M. Azorín, N.M. García, C. Pérez, R. Saltaren, and E. Yime, “Análisis del espacio de trabajo de un robot paralelo 3RRR,” xmvtech.org.
10. H. Mohammadi Daniali, P. Zsombor-Murray, and J. Angeles, “Singularity analysis of planar parallel manipulators,” Mechanism and Machine Theory, vol. 30, 1995, p. 665–678.