inf-383 seminario de modelo y métodos prof. teddy alfaronoell/smmc/mat2006/cap4.pdf · 1 control...
TRANSCRIPT

1
Control de robot móviles
INF-383Seminario de Modelo y Métodos
CuantitativosProf. Teddy Alfaro
Modelado de Sistemas
• El sistema de un robot se representa por unconjunto de variables reales satisfaciendo una igualdad o inigualdad
• A las variables se les llama variables de estado• Y al conjunto de variables que cumplen con
todas la restricciones se les llama espacio deestado

2
Teoría de control en robot móviles
• Sistema dinámico, variables de control u el
segundo término se le llama drift• Si• Es integrable, el sistema es holonómico• Si no lo es es no-holónomico
( ) ( ) ( ))()(),()(),()( 0 tuYtutxYtutxftx +==&
( ) 0,, =txxG &
Punto de vista de control
• La holonomicidad-noholonomicidad puede ser vista como– Direcciones en la cuales el movimiento es
permitido– (más que) las direcciones en las cuales el
movimiento es prohibido• Cuestionamiento
– Dado dos puntos arbitrarios, existe una trayectoria q(t) la cual satisfaga las restricciones cinemáticas

3
Representación Vectorial• Dependiendo de los grados de libertad del
sistema, se tendrán matrices y vectores
• La matriz de vectores Xi debe cumplir ciertas propiedades
• Supongamos, que nuestra es x tienda a cero (típico error)
• La solución a este sistema será la Ley de control,en este caso una solución conveniente es:
∑+= )()(0 xXuxXx ii&
xKu ⋅=& ikxiii exku −→−=
( )( )k
m
uuuuxxxx
L
L
,,,,,
21
21
==
Modelo Uniciclo
• Las variables de control son:– Velocidad traslacional – Variación de cambio angular
ωθ
θυθυ
=
==
&
&
&
sincos
yx
υω
4
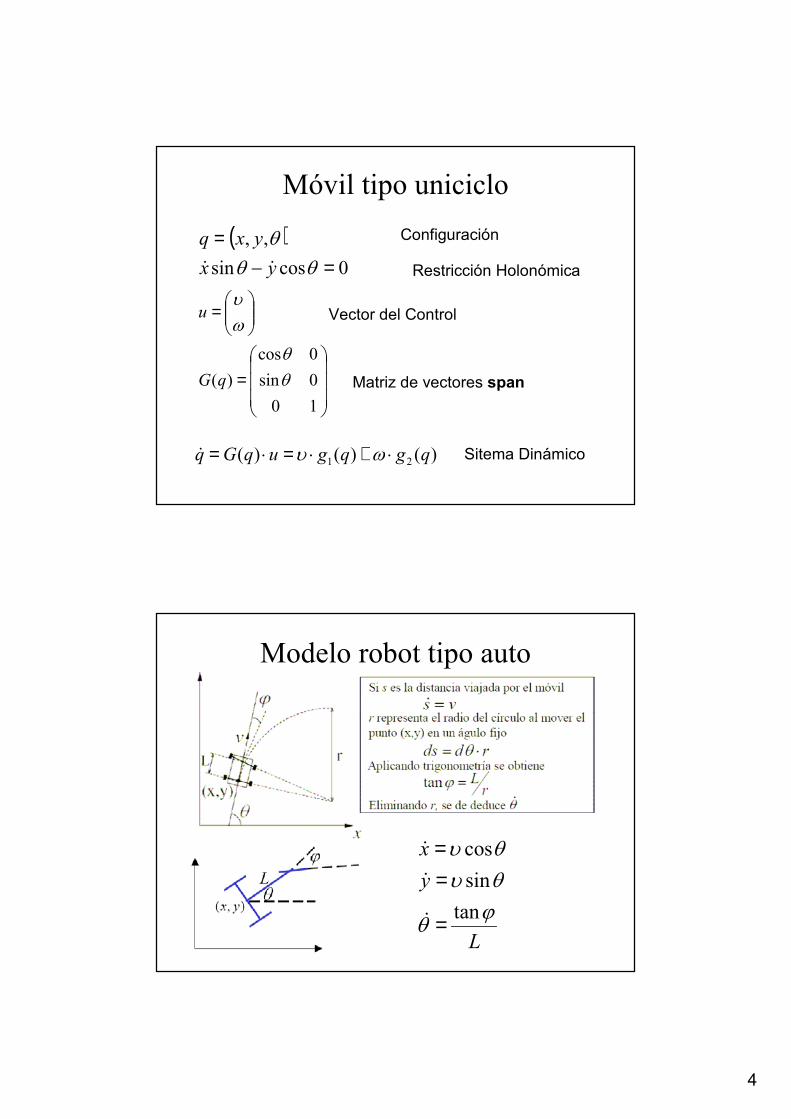
Móvil tipo uniciclo
( )0cossin
,,=−
=θθ
θyxyxq&&
=
=
100sin0cos
)( θθ
ωυ
qG
u
)()()( 21 qgqguqGq ⋅+⋅=⋅= ωυ&
Configuración
Restricción Holonómica
Vector del Control
Matriz de vectores span
Sitema Dinámico
Modelo robot tipo auto
L
yx
ϕθ
θυθυ
tansincos
=
==
&
&
&

5
Móvil tipo Auto( )
( ) ( )0cossin
0cossin,,,
=−
=+−+=
θθ
ϕθϕθϕθ
yxyx
yxq
ff
&&
&&
=
=
1000sin0cos
)(L
tagqG
u
ϕθθ
ϖν
( ) )()( 21 qgqguqGq ⋅+⋅=⋅= ϖν&
Configuración
RestricciónesHolonómica
Vector del Control
Matriz de vectores span
Sitema Dinámico
Matriz con singularidad en 2πϕ ±=
Controlabilidad• Condición de rango del algebra de Lie en un
punto p0
• Con es constantey
• Entonces el sistema no-holonómico será controlable si n0=n
• Lie Bracket
( ){ }mgggLiegpgSpanp ,...,,:)()( 2100 ∈=∆
( ) 00 )( npDim =∆
( ) npDim =
[ ] 12
21
21 )(, gqgg
qgqgg
∂∂
−∂∂=

6
Verificado el sistema uniciclo• Dimensión de q es 3• Dimensión de span es la
Se generan hasta 3 gi independientes. Luego, dimensión del Spande Lie(g1,g2)=dim(q) Entonces, es posible encontrar una ley decontrol para que conduzca el sistema desde cualquier estado acualquier otro estado
),,( θyxq =( ) ?),(dim 21 =ggLie
[ ]
−==
=
=
0cossin
,100
0sincos
21321 θθ
θθ
ggggg
Desarrollo anterior
Sólo se obtienen 3 gi

7
Verificando el sistema auto• Dimensión de q es 4• Dimensión del span de Lie(g1,g2)?
( )ϕθ ,,, yxq =
=
=
1000
0
tansincos
21 gL
g ϕθθ
Utilizando Lie Bracket
[ ] [ ]
−
==
−==
00cos
coscos
sin
,
0cos
100
, 2
2
3142
213 ϕθ
ϕθ
ϕL
L
gggL
ggg
Luego, dimensión del Span de Lie(g1,g2)=4=dim(q). Entonces, es posibleencontrar una ley de control para que conduzca el sistema desde cualquier estado a cualquier estado
Desarrollando• Calcular g3, resulta ser ortogonal
g3=[g1,g2]• Luego, verificar que se puede obtener g4
g4=[g1,g3]• g1,g2,g3,g4 independientes, se cumple que
la dimension 4 es equivalente a verificar el rango de la matriz span [g1 g2 g3 g4] se completo

8
Trajectory Tracking (unicycle)
ωθ
θυθυ
=
==
&
&
&
sincos
yx
refref
refrefref
refrefref
yx
ωθ
θυ
θυ
=
=
=
&
&
&
sin
cos
• Error x-xref, y-yref, - refθ θ
Trajectory Tracking
• Siguiendo el modelo cinemático, si es el error
• Debieramos obtener una expresión paray reescribir
• Luego encontrar una ley de control • Se obtiene K, y luego debe probarse que el
término driftless tiende a cero
),,( refrefref yyxxg θθ −−−=g&
∑ ⋅+= ugXgXg i )()(0&
gKu ⋅=
9
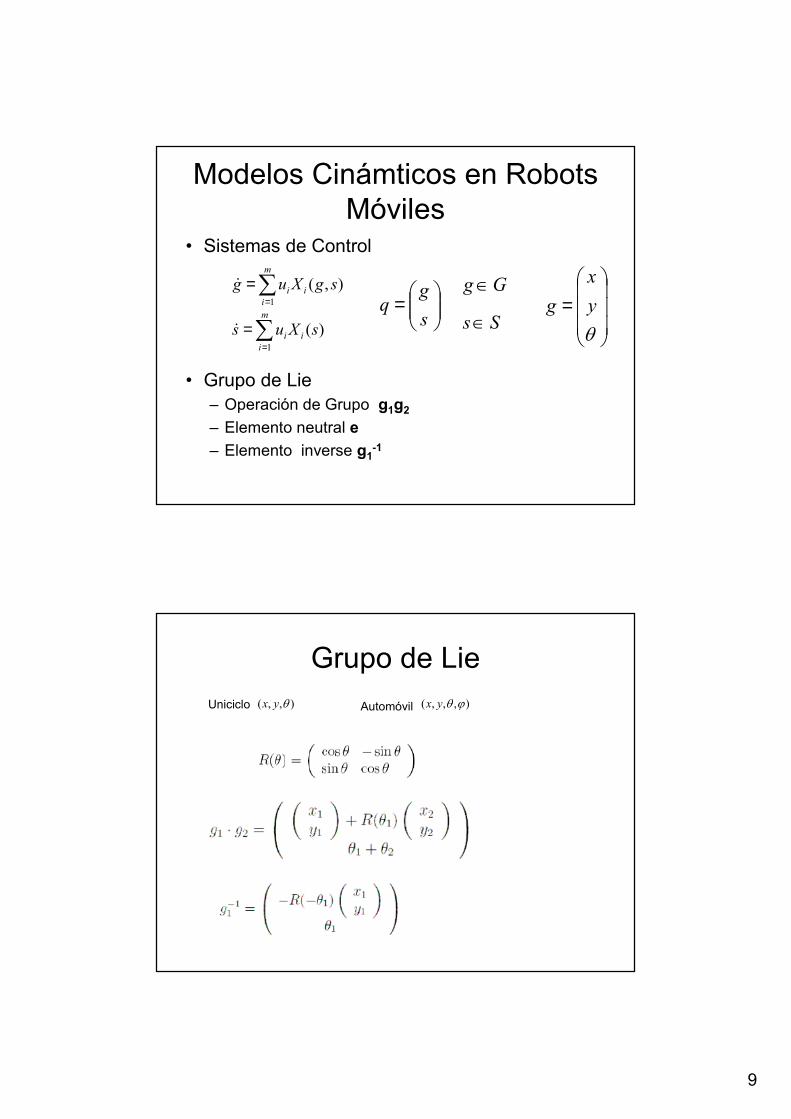
Modelos Cinámticos en Robots Móviles
• Sistemas de Control
• Grupo de Lie– Operación de Grupo g1g2
– Elemento neutral e– Elemento inverse g1
-1
∑=
=m
iii sXus
1)(&
∑=
=m
iii sgXug
1),(&
=sg
q
=θyx
gSs∈
Gg∈
Grupo de Lie),,( θyx ),,,( ϕθyxUniciclo Automóvil

10
Leyes de Control
• El cómo obtener leyes de control queda fuera del contenido del presente curso
• A continuación veremos un método moderno llamado funciones transversales
• La idea es controlar el errordonde f es una función armónica. A este enfoque se denomia Practical Stabilization
fggz r −−≈
El contenido que sigue, es sólo de tipo cultural y no preguntable para la prueba
Theorem
• X1,….,Xm Q vector field. Then the following properties are equivalent:– Lie(X1,…,Xm)(q)=TqQ (controllability)– For any neighborhood U of q in Q, there exist a
function such that, for any
∈
);( UTcf p∞∈
pT∈θ
{ } ( )pmf TdffXfXspanT )())(()),...,((1)( θθθθ ⊕=
∑=
=n
iii qXuq
1)(&
...“Practical Stabilization”, J.C. Samson, P. Morin, 2003.

11
Practical Stabilization
=
−
sggg v
1~ 1)(~ −⋅= αfgz
−−
=
r
r
rr
f yyxx
Rgθ
θ )(
Control Design on Lie Group
• Concept the transverse function used in control laws for systems
• Dynamic feedback law
• Yields the satisfaction of the equation
( )),~()()()~()( )(1
1 tgPzZzdrgdlHu
fz −=
−
−−
ααα&
∑=
+=m
iii tgPgXug
1),~()~(~&
)(zZz =& ii zk−

12
Transversality Condition
• Considering the tranversality matrix
• Inverse defined for all
( ) ( )nnnm
mfffXfXH
×+
∂∂
∂∂=
αα
ααααα )(,...,)(,)(,...,)()(
11
mnT −∈α
[ ] 0)( ≠αHDet
Examples

13
Unicycle Case
• Kynematic Equation
• Error Definition
• Practical Stabilization
• Transverse Function
+
=
100
0sincos
ωθθ
vg&
ggg r ⋅= −1~
1)(~ −⋅= αfgz
=
αε
αεε
αε
α
cos42sin
sin
)(
1
21
1
f
Unicycle
• Control Law
• Lie Group
• Linearization
( ))(),(),~()()( 11 zZfzAtgPzBHv
−− +−=
α
αω
( )ftgPzBfXfvXfzAz && −++= ),~()()()(),( 21 ω
−−−
=
33
22
11
zkzkzk
z&

14
Car-like Vehicle Case
+
=
1000
0
tansincos
ωϕθθ
Lvg&
⋅=−
ϕggg r
1~
• Kynematics Equation
• Error Definition
• Practical Stabilization 1)(~ −⋅= αfgz
Car-like• Transverse Function C.S. dim 4
• Transverse Function car-like vehicle
• Condition

15
Car-like• Control Law
• Not completely on the Lie Group
• Linearization
( ))(),(),~()()( 11
2
1
zZfzAtgPzBH
v
−− +−=
α
ααω
( ))(),~()()()(),( 21 zvCftgPzBfXfvXfzAz +−++= && ω
)(),()2/tan(2
44
33
22
11
zCfzvA
zkzkzkzk
z +
−−
−−
=&
Car-like convergence
• A(z,f) bounded matrix
=
0
00
)(4z
zc
)0()( 444 zetz tk−=

16
N-Trailer System
N-Trailer
• Standard N-Trailer vs. General N-Trailer

17
Remark• Standard N-trailer can be transformed into
chained form• Standard case has already been widely studied
but there exist few result for the general case, and the existing solutions always require some assumptions on the reference trajectory
• Motivation:– a solution with the Transversal Function
Approach – that does not require such assumptions.
Control Variables
• Change speed matrix
• with

18
1-Trailer System
Kynematics
• Kynematic Equations
• 2 control variable
• Doing

19
Rewrite system
Homogeneous Approximation
• System Chained
• Local Approximation
• Homogeneous Properties
ψ• Change of coordinate

20
Perturbation Terms
If r=(1,q,q+1,q+2) is the weight vector for the dilatation homogeneous, the Chained systems is a homogeneous approximation of the system 1-trailerWith of th change of coordinates and q>1.ψ
Transverse Function
1−ψWith
Condition

21
Control Design• Error
• With
• and
Control Law
22
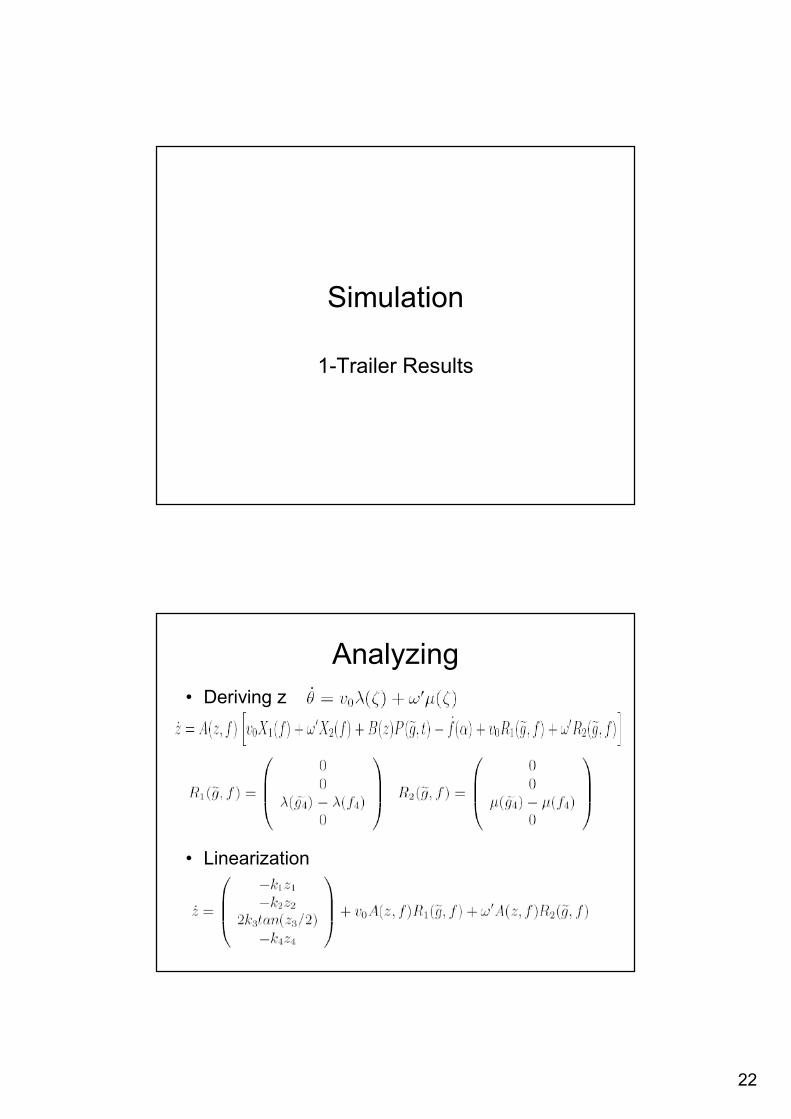
Simulation
1-Trailer Results
Analyzing• Deriving z
• Linearization

23
Convergence
• If thenFor this converge to zero
Special Case 2-Trailer System

24
Kynematics
• Kynematic Equations
• Writing all in function of the speeds),( 22 ωv
Kynematic General
• Considering

25
Special Case
• Simplifying, we study the case when C2=0
Rewrite system
26
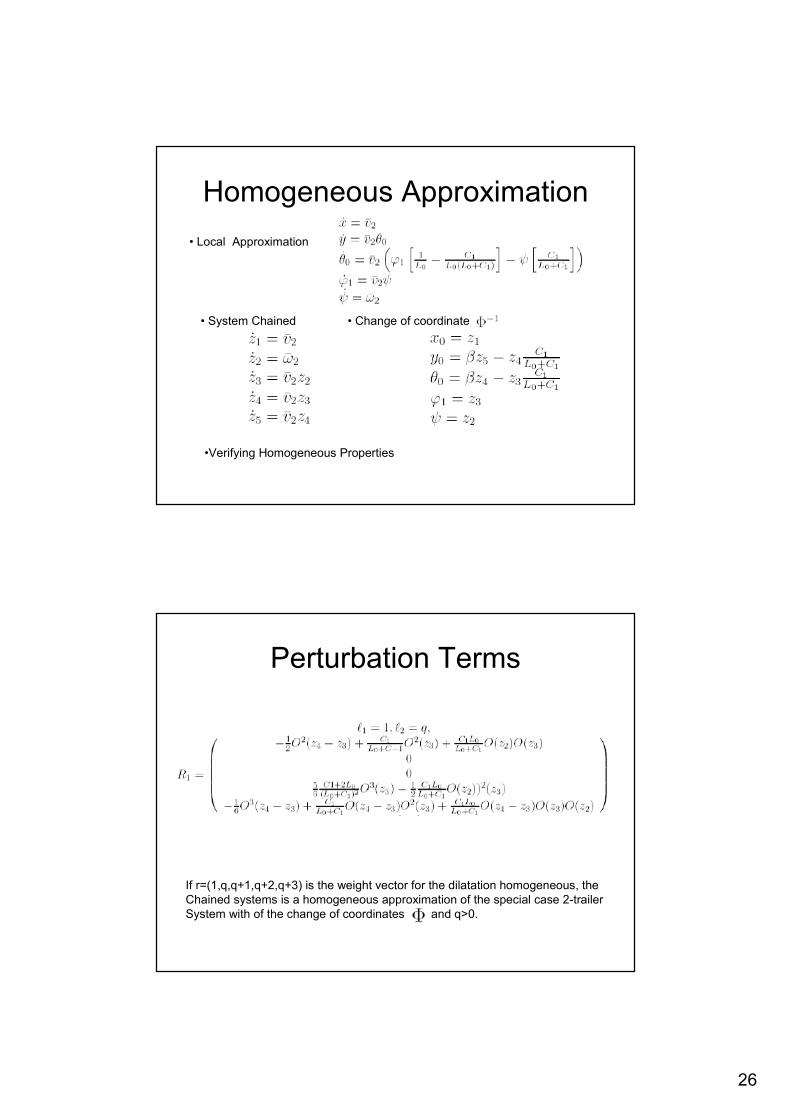
Homogeneous Approximation
• System Chained
• Local Approximation
•Verifying Homogeneous Properties
• Change of coordinate
Perturbation Terms
If r=(1,q,q+1,q+2,q+3) is the weight vector for the dilatation homogeneous, the Chained systems is a homogeneous approximation of the special case 2-trailer System with of the change of coordinates and q>0.

27
Transverse Function
With
Control Design• Error
• With
• and

28
Control Law
Transversality Condition
• Hard condition for the parameters

29
Simulation
2-Trailer Results
Analyzing• Deriving z
• Linearization

30
Convergence
• z4,y z5
Convergence
• Third term

31
Annex
1-trailer figure

32
2-trailer figure