implementaciÓn de un bag boxing...
TRANSCRIPT

Fecha de envío: 5 de febrero/2016
IMPLEMENTACIÓN DE UN BAG BOXING INTERACTIVO PARA EL ENTRENAMIENTO DE ARTES MARCIALES CON APLICACIÓN EN
ANDROID
IMPLEMENTATION OF AN INTERACTIVE BAG BOXING FOR MARTIAL ARTS TRAINING WITH ANDROID APPLICATION
Derly Lorena Escobar Salamanca* John Alexander forero Rubio*
Resumen: Este artículo es resultado de un proyecto educativo en la Universidad
Distrital Francisco José de Caldas, acerca del mejoramiento de un saco de boxeo
convencional con un proceso electrónico y digital que le permite al saco tener un
interacción con un usuario, abarcando las temáticas de aplicaciones para Android,
velocidad de reacción a estímulos visuales en distintos tipos de usuario, entre otros.
Se pretende buscar la optimización de un saco de boxeo en busca de promover
excelentes entrenamientos individuales y la mejor ubicación para dar golpes efectivos,
aplicando un sistema de adquisición electrónico que permite conocer el desempeño
del usuario y un interfaz en Android con toda una variedad de opciones según el tipo
de entrenamiento que se desee y los objetivos que se tienen. Se presentan los
conceptos teóricos explorados y los resultados obtenidos.
En primer lugar se efectuó la revisión de estado del arte sobre la temática, luego se
evaluaron los diferentes tipos de sensores con el fin de identificar el más efectivo a la
hora de detectar golpes con la suficiente resistencia para soportarlos, para finalmente
utilizar finales de carrera mecánicos ubicados estratégicamente con un recubrimiento
en un tipo de plástico resistente pero maleable, para evitar lesiones del usuario.

Fecha de envío: 5 de febrero/2016
Se desarrollaron distintos tipos de entrenamiento para evaluar los resultados en la
curva de aprendizaje frente a un entrenamiento individual con saco de boxeo
convencional.
Palabras clave: Problemas en entrenamientos individuales, optimización de un saco de
boxeo, tipos de entrenamientos para golpes, mecanización de golpes, aplicación en Android,
saco de boxeo.
Abstract:
This paper is the result of a research educational project on the improvement of a sack of
boxing in the University Francisco José de Caldas, with an electronic and digital process,
that allows the bag to have an interaction with a user, covering the topics of applications
Android, reaction rate to visual stimuli in different types of users, among others. It is
intended to seek the optimization of a punching bag in search of promoting excellent
individual workouts and the best location to provide effective blows, using an electronic
acquisition list showing the performance of the user interface on Android with a variety of
options depending on the type of training you want and the goals you have. Theoretical
concepts explored and results are presented.
Key Words: Boxing bag, Android App, Problems in individual training, optimization of a
punching bag, types of training to blows, blows mechanization.
1. Introducción
La problemática encontrada al aprender o practicar un arte marcial es hacerlo de forma
individual, normalmente se necesita un Pad Holder (ordenador de golpeo) o un compañero

Fecha de envío: 5 de febrero/2016
de entrenamiento que ayude a efectuar la practica de nuevos golpes y combinaciones, en
estos caso se dificulta tener un conteo preciso de la cantidad de golpes efectivos además no
se tiene una herramienta de diagnóstico y medición del desempeño de la velocidad de los
golpes lanzados al saco de boxeo convencional.
Se han desarrollado proyectos con el mismo enfoque en el campo de biomédica deportiva
con el objetivo de mejorar los entrenamientos por ejemplo, Slamman que consiste en una
réplica de una persona desde el torso hasta la cabeza con pequeños puntos de luz (SL,
2012), el cual tiene costos elevados. Otros proyectos se han realizado modificando un saco
convencional con gran cantidad de puntos de luz que no son específicos a la hora examinar
que tan acertado es golpe (Acheron, 2012), por el contrario se encontró un proyecto con
puntos de luz bastante pequeños, en el caso de personas que están iniciando es poco
práctico ya que se dificulta acertar los golpes a un lugar tan especifico (Parekh, s. f.), otro tipo
de proyectos usan adaptadores para las muñecas que se encuentra conectado con una
aplicación en Android que muestra el consumo calórico y proporcionan toda la información
acerca de los golpes que da el usuario con un costo bastante elevado («iPunch», 2014).
Se pretende entonces, convertir un saco de boxeo convencional en un saco de boxeo
interactivo, iniciando con una lona resistente que posee un práctico sistema de amarre, que
le permite adaptarse a cualquier tamaño, diseño y peso de saco que se tenga. Esta lona
denominada chaleco tiene posicionados estratégicamente unos puntos de luz con un tamaño
perfecto para recibir puños y patadas que sean efectivos en una pelea real. Se tienen dos
posibilidades para configurar este dispositivo un control desde una aplicación en Android en
un celular o Tablet y un panel de control externo al saco. Existen varios tipos de
configuraciones según el propósito diario del entrenamiento el primero es al azar donde se
encienden las luces aleatoriamente ya sea por cantidad de golpes o por tiempo, otra opción
Fecha de envío: 5 de febrero/2016
disponible son secuencias predeterminadas para la correcta mecanización de nuevos golpes
y combinaciones, en ambos casos se dispone de una selección de velocidad con el fin de
mejorar los tiempos de reacción del usuario, las dos configuraciones cuentan con una
estadística final de golpes acertados, que le permite al usuario verifica su progreso a diario.
2. Desarrollo del proyecto
Este artículo se centra en el mejoramiento de un saco de boxeo como un sistema de
entrenamiento individual, al observar los problemas que presentaban algunas opciones que
ya están disponibles, se realizaron mejoras desde el diseño hasta el funcionamiento de un
saco de boxeo interactivo.
Este proyecto esta dividió en tres secciones importantes la primera es la parte física del saco
de boxeo, la segunda es la parte electrónica y por último la interfaz con el usuario.
1. Saco de boxeo: al observar los productos del mercado se encontró que existen
diferentes tipos de saco desde su tamaño, altura, peso, material y base, con base en
esto se hizo un recubrimiento para cualquier tipo de saco al cual se le dio el nombre
de chaleco.
Este chaleco está fabricado a partir de una tela tipo lona de referencia “HURACAN”
resistente a la tensión y el rasgado que posee un base con repelencia a líquidos y
otros factores ambientales por su protección con lafgard protector textil, totalmente
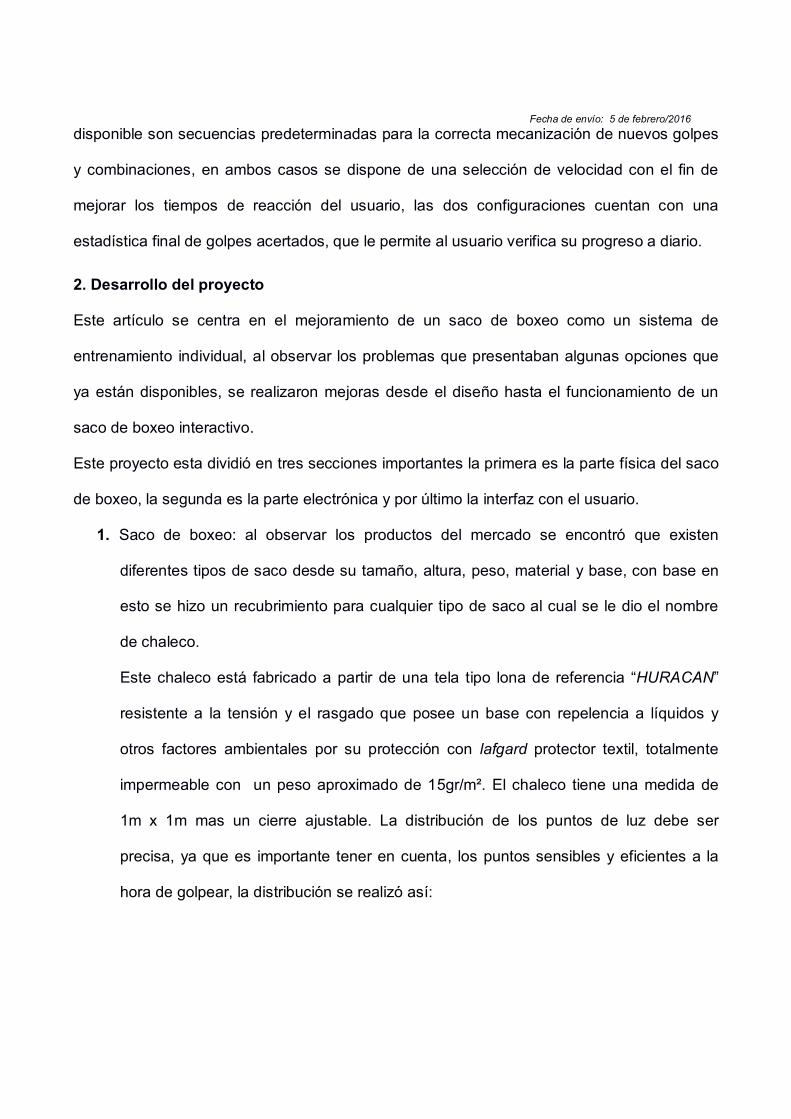
impermeable con un peso aproximado de 15gr/m². El chaleco tiene una medida de
1m x 1m mas un cierre ajustable. La distribución de los puntos de luz debe ser
precisa, ya que es importante tener en cuenta, los puntos sensibles y eficientes a la
hora de golpear, la distribución se realizó así:
Fecha de envío: 5 de febrero/2016
Imagen 1: Distribución de puntos de luz.
La distribución está dividida en colores, los puntos rojos 1,2 y 3 representan el rostro
del adversario; los puntos naranjas 4,5 y 6 representan el pecho y la parte lateral del
mismo, y por último los puntos amarillo 7 y 8 que presentan las piernas.
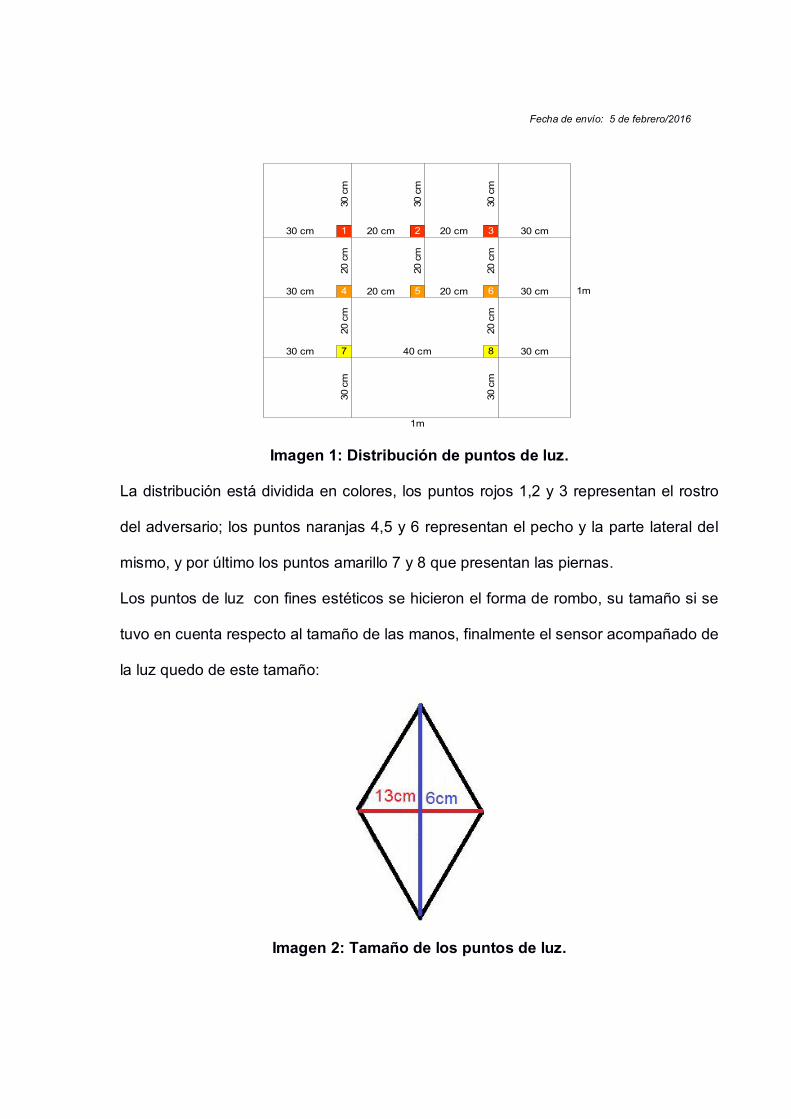
Los puntos de luz con fines estéticos se hicieron el forma de rombo, su tamaño si se
tuvo en cuenta respecto al tamaño de las manos, finalmente el sensor acompañado de
la luz quedo de este tamaño:
Imagen 2: Tamaño de los puntos de luz.
30 c
m
30 c
m
30 c
m
1m
30 cm 1 20 cm 2 20 cm 3 30 cm
20 c
m
20 c
m
20 c
m
30 cm 4 20 cm 5 20 cm 6 30 cm
20 c
m
20 c
m
30 cm 7 40 cm 8 30 cm30
cm
30 c
m
1m
Fecha de envío: 5 de febrero/2016
Este rombo esta hecho de un plástico maleable pero resistente a los golpes, que no se
deforma con el tiempo, y cubierto por una tela tipo fieltro de color blanco que permite
el paso de luz fácilmente de igual manera la tela está cubierta de un plástico delgado
que vuelve impermeable el punto de luz, para que evite cualquier contacto con el agua
a la hora de ser limpiado y no permita que la tela se manche a través del tiempo.
2. Sistema electrónico: Este sistema está compuesto por tres partes la primera son los
sensores, el sistema de protección y el microcontrolador.
2.1. Sensores: para los sensores se usaron finales de carrera mecánicos distribuidos
estratégicamente en el área del rombo, realizando la función de un botón, con el fin
de que detecten un golpe en el punto sin importar que no esté posicionado
perfectamente en el centro del rombo; se ubicó un final de carrera en cada una de
las esquinas del rombo y uno más en el centro del mismo. Se uso un plástico
maleable resistente como base y protección de los finales de carrera, encima de
estos se ubico una capa de tela tipo filtro color blanca con la intención de dar un
acolchado al sensor y una capa de plástico delgado color transparente con el fin de
afirmar las capas del sensor y dejar el espacio necesario para que los finales de
carrera vuelvan al estado inicial después de cada golpe, encima de este se
colocaron 4 tiras de 3 led en forma de rombo las cuales son muy eficientes a la
hora de recibir golpes por su recubrimiento en silicona, poseen una luz potente que
permite verla con claridad, encima de estas de nuevo se realizo en recubrimiento
de tela blanca y plástico delgado para más suavidad al tacto, proteger el sensor y
las luces del agua y la suciedad.

Fecha de envío: 5 de febrero/2016
Imagen 3: Disposición de los sensores
Imagen 4: Sensor y luz.
2.2. Sistema de protección: ya que el sensor posee el mismo funcionamiento que un
botón se conectan directamente a las entradas análogas del microcontrolador.
Para las luces se realizó un circuito de protección con transistores y resistencias, el
cual permite controlar la corriente que pasa por ellas y la corriente que pueda en
caso de alguna falla devolverse a las salidas análogas del microcontrolador
provocando daños graves.

Fecha de envío: 5 de febrero/2016
Ya que la corriente máxima que se puede recibir por los pines del Arduino es 20
mA, al conectar los 4 pulsadores del teclado y los 8 sensores, se conecta una
resistencia de 250 ohmios en adelante con base en la ecuación 1:
Ecuación 1: Calculo de resistencia mínima de protección.
Buscando mayor protección se eligió una resistencia de 10K, en el momento en
que se active el sensor este da paso al voltaje al cual se encuentra conectado, en
este caso son 5v con eso se define que la corriente que recorre cada pin se
muestra en la ecuación 2:
Ecuación 2: Corriente de entrada.
Según los resultados mostrados por la ecuación 2 la corriente es óptima para evitar
daños en los pines.
Para conectar las luces que requieren 12v de cada zona donde se encuentran los
sensores, no es posible utilizar el arduino por que este proporciona 5v y 3.3v; por
datos prácticos al alimentar las luces con 12v se obtuvo una corriente de 90.3mA
la cual dañaría los pines del micro, aunque se hace necesario tener un corriente
similar para no disminuir la intensidad de las luces, por este motivo se conectan al
colector de un transistor 2n3904 con su emisor a tierra y a la base una resistencia,
Conociendo la corriente de las luces se asume que por colector deben circular
90.3mA, con este dato presente se busca la corriente de base, con la ecuación 3:
Ecuación 3: Corriente colector NPN.

Fecha de envío: 5 de febrero/2016
Dónde:
: 373, por datos prácticos.
Con esto se procede a despejar la corriente de base en la ecuación 4:
Ecuación 4: Corriente de base.
Se va a calcular la resistencia de base, por tanto es necesario buscar el voltaje que
se encuentra en la misma, como se expone en la ecuación 5:
Ecuación 5: Voltaje de base
Por esto la resistencia va a tener un valor que se presenta en la ecuación 6:
Ecuación 6: Resistencia de base
Con estos datos se busca una resistencia de un valor cercano a , la
opción fue 18 la cual se conectara al pin del micro que habilitara con un uno
lógico el paso de corriente entre colector y emisor, así se encienden las luces.
A través de esta resistencia circulara una corriente que se evidencia en la ecuación
7:
Ecuación 7: Corriente con resistencias 18 K
La corriente que circula a través del colector se representa en la ecuación 8:

Fecha de envío: 5 de febrero/2016
Ecuación 8: Corriente de colector
Al realizar este proceso matemático se observó que la corriente que se obtiene al
conectar la resistencia de 18k es aceptable, ya que es importante que el voltaje
que llega a las luces sea uno cercano a 12v. A continuación se muestra el circuito
de protección por cada pin, ya que son 8 sensores realizamos ocho circuitos
iguales.
Q92N3904
D9LED
R2110k
12V
Pin arduino
Circuito 1: Protección de los pines.
2.3. Microcontrolador: se usó un Arduino Mega el cual cumple con varias funciones, la
primera es conectarse por vía bluetooth a la aplicación en Android la cual le
indicara las elecciones del usuario en velocidad y tipo de entrenamiento, este
siempre se mantiene conectado a una interfaz local conectada cerca al saco, que
conserva las mismas funciones que la interfaz en Android.
Al obtener estos datos los interpreta y empieza a enviar las indicaciones a las luces
para que se enciendan con un orden y velocidad específica, al mismo tiempo está
tomando los datos conseguidos por los sensores que detectan los golpes. El
Arduino va llevando la cuenta de los aciertos y errores cometidos por el usuario en
el entrenamiento.

Fecha de envío: 5 de febrero/2016
Las variables manejadas en el programa en su gran mayoría son de tipo entero
(int, estas ocupan menor espacio de memoria), a su vez existen variables de tipo
long que llevan el conteo de los resultados (se usaron de este tipo ya que existe la
posibilidad de que el valor de esta sea grande y pase el límite de una variable int),
además unas variables de tipo string y carácter usadas para recibir los valores a
través del bluetooth.
Se usaron dos librerías en la programación las cuales son:
LiquidCrystal: esta se utiliza para controlar la lcd con el fin de enviar los mensajes y
proporcionar el menú al usuario.
TimerOne: se usa para crear dos relojes, uno de ellos es para la velocidad de
reacción y el otro es para el entrenamiento al azar por tiempo.
Cuando se maneja el saco con el mando convencional se realiza un recorrido entre
los 4 botones con el fin que el Arduino reconozca las opciones de selección, un
proceso similar se usa para la detección de golpes en los sensores.
Al elegir la opción bluetooth, el Arduino espera a que se conecte el celular cuando
el usuario inicia a manejar el saco desde la aplicación, la lcd mostrara que está
activado el bluetooth desactivando desde ese momento el teclado hasta el
momento en que se desconecte el protocolo bluetooth del saco.
Al usar el app la comunicación entre el celular y el Arduino es paralela es decir el
microcontrolador recibe de manera simultánea la información conforme se navega
por la aplicación asignado a las variables del programa dichos parámetros de
selección, se realiza un proceso semejante para el mando convencional.
Esta comunicación funciona en dos partes emisor y receptor, el Arduino maneja
dos letras A y B, la aplicación maneja caracteres alfanuméricos con tres letras E, F

Fecha de envío: 5 de febrero/2016
y G; la letra E significa que el usuario está entrenando y la aplicación espera la
letra A para dar por terminado el entrenamiento, mientras tanto el microcontrolador
envía una B para que la comunicación entre ambos dispositivos se mantenga
activa y permita un retroceso de la aplicación, cuando se recibe un F quiere decir
que se está solicitando los resultados de la prueba y al dar por terminado la
muestra de los mismos se recibe la G, cuando se retrocede en las pantallas se
envía un cero, los demás números es la asignación de los parámetros de
entrenamiento.
Al dar inicio al entrenamiento se encienden las luces según sea la selección
elegida: azar o secuencia, en este punto se usa la librería Timerone para identificar
el golpe que se impacta en alguno de los ocho sensores.
Se han usado varias funciones para no repetir líneas de programación y mantener
un orden: azar(), secuencia(), ilumina(), golpe(), desilumina(), apagartl(), reaccion()
y flecha(), los cuales su nombre indica la función que realiza; se obtiene un numero
al azar con la función Random, la función reacción() es la interrupción del Timer, y
la función flecha es para el teclado incluido en el saco.
Para la comunicación por bluetooth se ha utilizado el modulo HC 06 una unidad
extensible para arduino, el modulo posee un led que indicara si está conectado o
no, cuando parpadea significa que esta desconectado de lo contrario estará
conectado, la conexión con el arduino y el modulo se hace en serie en los pines
donde se haría una comunicación con el PC, el modulo viene configurado a una
velocidad de 9600 por tanto en la programación se establece esta misma
velocidad.
Fecha de envío: 5 de febrero/2016
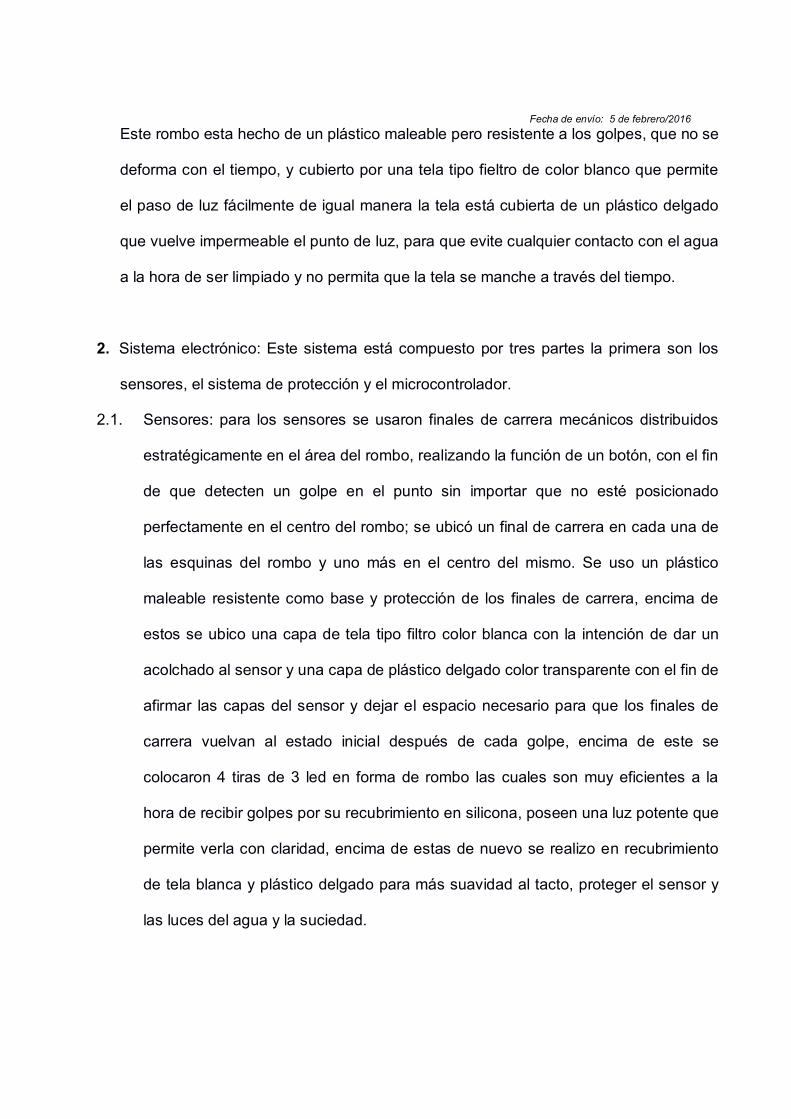
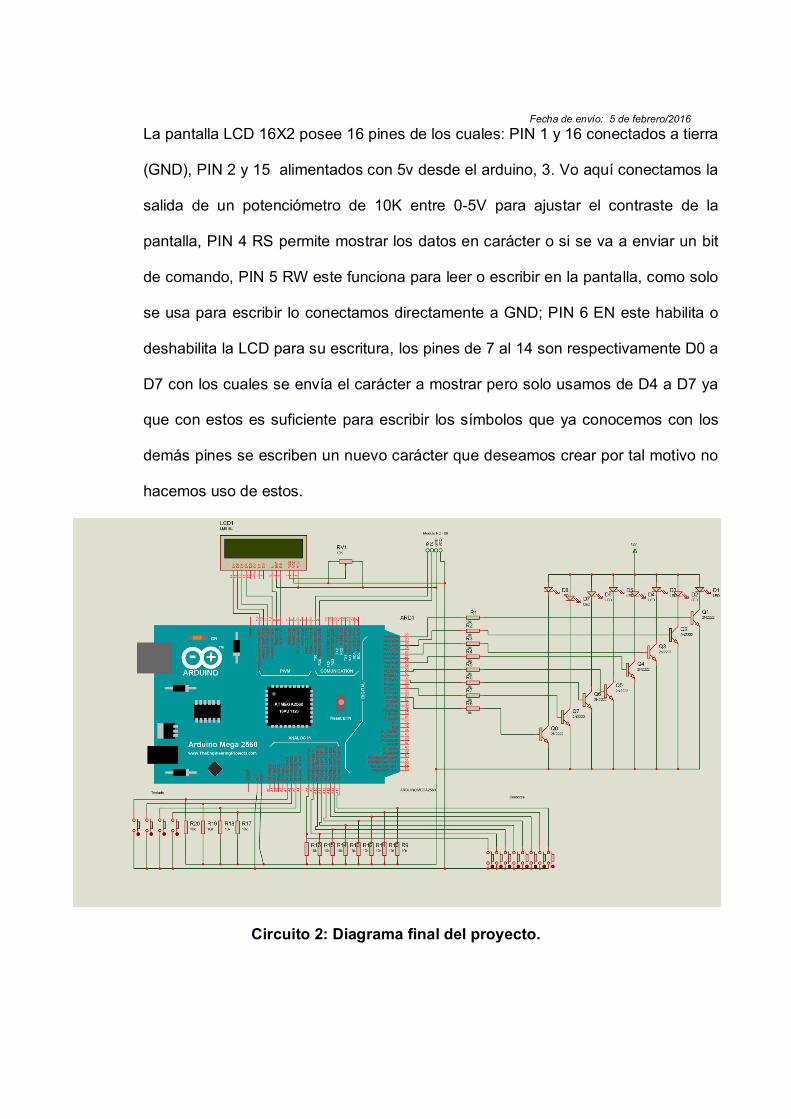
La pantalla LCD 16X2 posee 16 pines de los cuales: PIN 1 y 16 conectados a tierra
(GND), PIN 2 y 15 alimentados con 5v desde el arduino, 3. Vo aquí conectamos la
salida de un potenciómetro de 10K entre 0-5V para ajustar el contraste de la
pantalla, PIN 4 RS permite mostrar los datos en carácter o si se va a enviar un bit
de comando, PIN 5 RW este funciona para leer o escribir en la pantalla, como solo
se usa para escribir lo conectamos directamente a GND; PIN 6 EN este habilita o
deshabilita la LCD para su escritura, los pines de 7 al 14 son respectivamente D0 a
D7 con los cuales se envía el carácter a mostrar pero solo usamos de D4 a D7 ya
que con estos es suficiente para escribir los símbolos que ya conocemos con los
demás pines se escriben un nuevo carácter que deseamos crear por tal motivo no
hacemos uso de estos.
Circuito 2: Diagrama final del proyecto.

Fecha de envío: 5 de febrero/2016
3. Interfaz: El prototipo tiene dos interfaz diferentes una aplicación para sistemas
operativos Android y otra interfaz local ubicada cerca al saco con una pantalla y un
teclado, cualquiera de las dos tiene las mismas funciones.
3.1. Aplicación para Android: Esta interfaz se realizó con el siguiente funcionamiento:
Diagrama 1: Estructura del programa.
A continuación, se muestran todas las diferentes pantallas de la aplicación:
Fecha de envío: 5 de febrero/2016
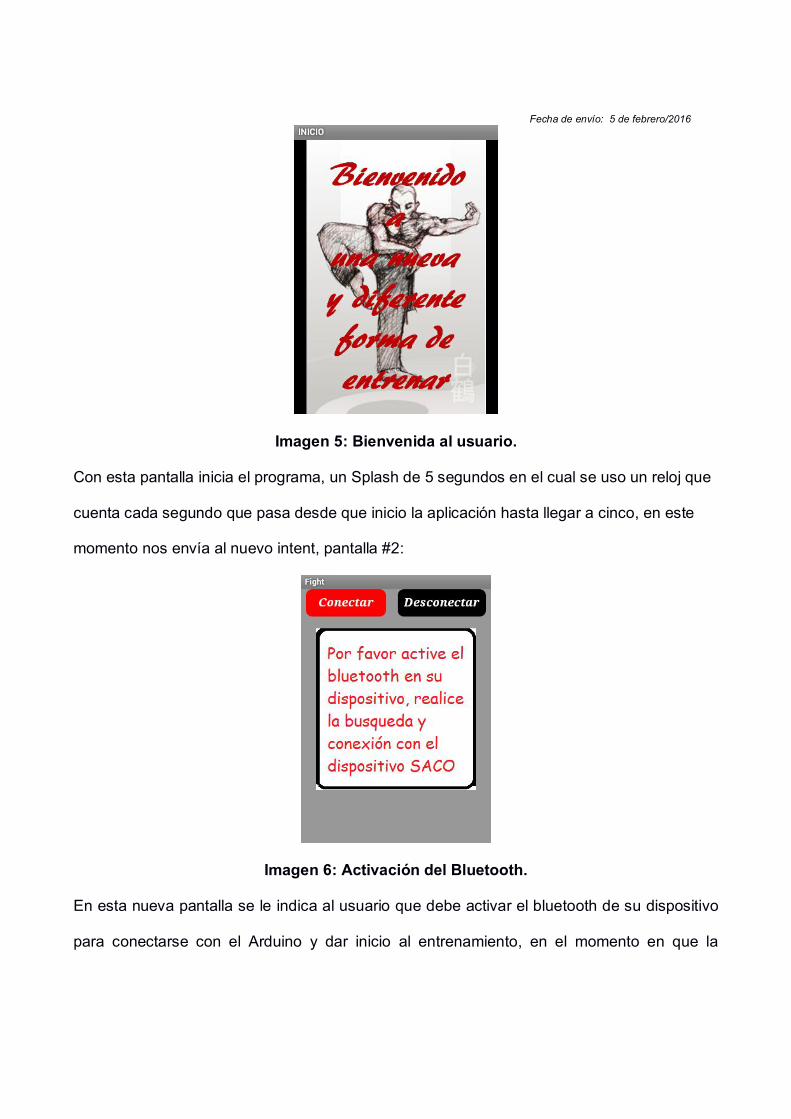
Imagen 5: Bienvenida al usuario.
Con esta pantalla inicia el programa, un Splash de 5 segundos en el cual se uso un reloj que
cuenta cada segundo que pasa desde que inicio la aplicación hasta llegar a cinco, en este
momento nos envía al nuevo intent, pantalla #2:
Imagen 6: Activación del Bluetooth.
En esta nueva pantalla se le indica al usuario que debe activar el bluetooth de su dispositivo
para conectarse con el Arduino y dar inicio al entrenamiento, en el momento en que la

Fecha de envío: 5 de febrero/2016
conexión está realizada, aparecerá la opción “continuar”. Al seleccionar esta opción nos lleva
el intent del main, pantalla principal:
Imagen 7: Pantalla principal.
En esta pantalla se tiene la opción de escoger el tipo de entrenamiento y la velocidad a la
cual se desea entrenar (para facilitar el manejo de la información que brinda el usuario se
usó la misma pantalla para diseñar el resto de vistas en el mismo layout), el botón para
continuar solo funcionara si el usuario ya ha seleccionado el tipo de entrenamiento y la
velocidad, de lo contrario este no hará nada. Con el fin de evitar que el usuario active varias
opciones se desactivan los otros checklist en el momento en que otro ya este seleccionado.
Al continuar, de acuerdo al tipo de entrenamiento se harán visibles las opciones de cada una,
como si fueran dos pantallas diferentes, esto se muestra a continuación:

Fecha de envío: 5 de febrero/2016
Imagen 8: Entrenamiento al azar.
En el entrenamiento al azar, se disponen de dos opciones tiempo y cantidad de golpes, cada
una de estas se maneja con un if el cual empieza a funcionar en el momento en que se
seleccione la opción, de esta forma se ejecuta una sola vez este if, para así evitar un timer
que pregunte constantemente por el estado de cada una. En el momento de seleccionar
alguno de los dos entrenamientos, se despliega una nueva opción:
Imagen 9: Selección de entrenamientos al azar.

Fecha de envío: 5 de febrero/2016
Para seleccionar la cantidad de tiempo y golpes, nos muestra un spinner el cual muestra una
pantalla Dialog que nos lanza un listview, para el cual se uso un adaptador con la forma que
se muestra en las imágenes, un Textview y un radiobutton, para cada opción de la lista.
En el caso de que la opción seleccionada sea entrenamiento por secuencia, se observa una
pantalla, que tiene el mismo funcionamiento que las anteriormente descritas:
Imagen 10: Selección de entrenamientos por secuencia.
Cada una de una de las secuencias que se muestran, están preparadas en función de un
entrenamiento, normal de artes marciales.
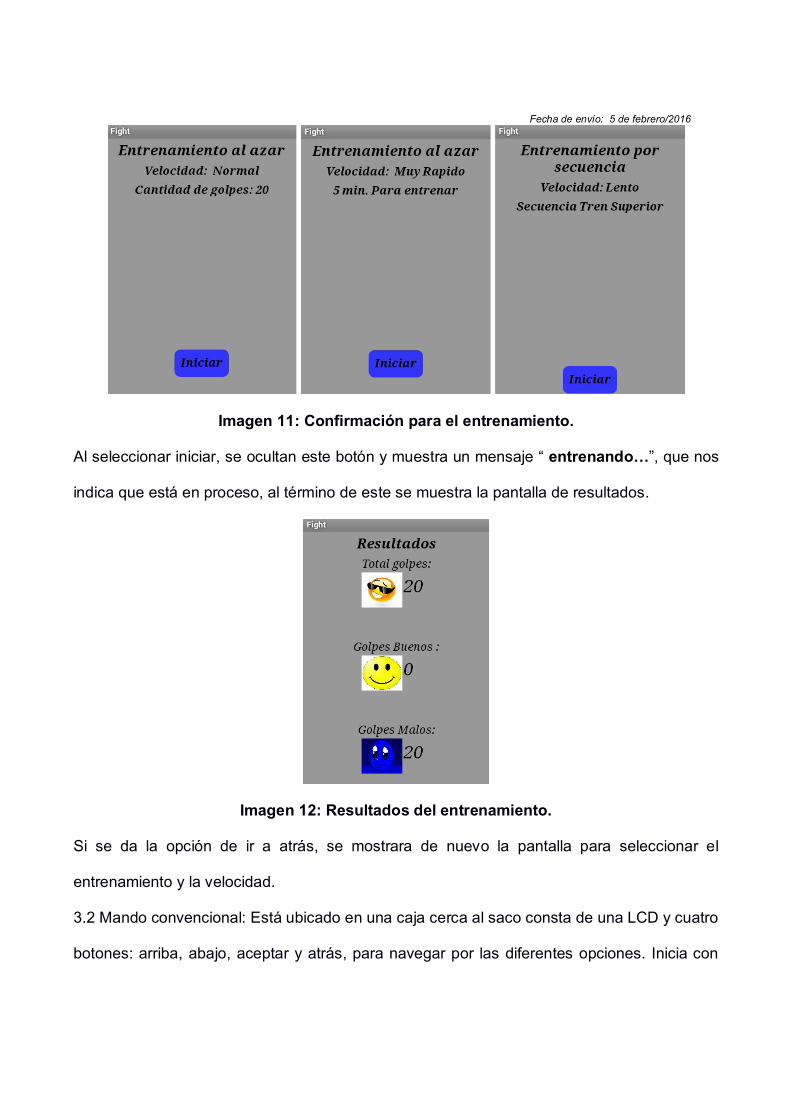
En cualquiera de estas pantallas al dar continuar nos muestra una confirmación de la
información brindada por el usuario, para verificar si es el entrenamiento que desea.
Fecha de envío: 5 de febrero/2016
Imagen 11: Confirmación para el entrenamiento.
Al seleccionar iniciar, se ocultan este botón y muestra un mensaje “ entrenando…”, que nos
indica que está en proceso, al término de este se muestra la pantalla de resultados.
Imagen 12: Resultados del entrenamiento.
Si se da la opción de ir a atrás, se mostrara de nuevo la pantalla para seleccionar el
entrenamiento y la velocidad.
3.2 Mando convencional: Está ubicado en una caja cerca al saco consta de una LCD y cuatro
botones: arriba, abajo, aceptar y atrás, para navegar por las diferentes opciones. Inicia con

Fecha de envío: 5 de febrero/2016
un mensaje de bienvenida a continuación, se debe indicar si se manejara o no la aplicación
para Android, con el fin de desactivar este mando. Al ser seleccionado se despliegan las
mismas opciones que la aplicación, tienen el mismo orden presentado en el diagrama 1, este
es administrado por el Arduino directamente.
Para usarlo existe una variable que indica al arduino en que parte del menú se encuentra el
usuario así se mantiene un orden y a través de sentencias if que preguntan el valor que
posee dicha variable se hacen las respectivas funciones que se ofrecen por medio del
teclado; es decir si el usuario oprime arriba o abajo se mostrara el cambio en la pantalla, y al
dar Continuar se harán los ajustes de las variables de entrenamiento, esta asignación e inicio
de entrenamiento se hace igual que en la aplicación.
El resultado final del proyecto se muestra a continuación con el chaleco implementado en el
saco de boxeo con su funcionalidad completa.
Imagen 13: Proyecto Final

Fecha de envío: 5 de febrero/2016
Imagen 14: Proyecto Final.
3. Resultados
Se realizó un pequeño estudio para comparar el tiempo de aprendizaje con un saco
convencional y el saco interactivo, este se hizo en personas de diferentes edades y estilos de
vida.
Tabla 1: Sujetos de prueba.
En primer lugar se consultó un entrenador de artes marciales mixtas por los golpes básicos,
los cuales se enseñaran a los sujetos de prueba, menos a Sebastián Vidal ya que él tenía un
entrenamiento previo en el tema, el aprenderá unas combinaciones de golpes avanzados.
N° Nombre Edad Profesión Deporte1 Lorena Escobar 22 Estudiante Voleyball2 Diego Pedraza 24 Ingeniero de proyectos Voleyball3 Orlando Escobar 47 Asesor comercial Futbol4 Zulma Salamanca 42 Asesor comercial Ninguno 5 Andrea Escobar 10 Estudiante Ninguno 6 Pilar Romero 35 Entrenadora GYM7 Luis Rojas 34 Bartender GYM8 Alexander Forero 21 Estudiante Ninguno 9 Sebastian Vidal 23 Entrenador MMA10 Alejandra Pedraza 14 Estudiante Natación

Fecha de envío: 5 de febrero/2016
“Los seis golpes clásicos del boxeo son el directo, jab, swing, cross, hook y uppercut. Los
tres primeros corresponden a la larga distancia, y por lo tanto hacen impacto sobre la línea
alta. El cross se aplica en la media distancia, y el uppercut en la corta. El hook es el único
golpe que se aplica tanto en la corta como en la media distancia; y el jab es el único que se
aplica con una sola mano, la izquierda en los diestros y la derecha en los zurdos. Todos los
otros golpes pueden aplicarse con ambas manos. Como regla general, luego de asestar el
golpe, el puño debe regresar a la posición de guardia para no perder la capacidad de ser
lanzado nuevamente, como para no descubrirse a los golpes del rival.
A. El DIRECTO: es el golpe más largo, tiene por blanco el centro del mentón del rival, y se
aplica con ambas puños; se practica desde la posición inicial o de guardia, extendiendo el
brazo en línea recta desde la altura del hombro, sin desplazar el codo hacia el costado y con
simultánea torsión del brazo hacia adentro, de modo que al impactar los nudillos sobre el
blanco la palma de la mano esté paralela al piso y el brazo completamente extendido. Al
aplicarse con la mano IZQUIERDA se consigue mayor efectividad y alcance combinándolo
simultáneamente con un desplazamiento hacia adelante, lo que permite no solo cargar el
peso del cuerpo sino también ampliar la distancia de aplicación.
B. El JAB: es un golpe con el puño izquierdo, un poco más corto que el directo y se apunta
al costado derecho del mentón. A diferencia del directo de izquierda, el jab toma una
trayectoria ligeramente cruzada hacia la derecha, combinada con desplazamientos laterales
hacia la izquierda.
C. El SWING: es un golpe que habitualmente se lanza con el puño izquierdo, dándole una
trayectoria ligeramente curva que busca impactar sobre la sien derecha del adversario ,
simultáneamente con un desplazamiento circular hacia la izquierda que permita la trayectoria
del puño.
Fecha de envío: 5 de febrero/2016
D. El CROSS: es un golpe que puede aplicarse con ambas manos, de media distancia
dirigido a la cabeza en el que al momento del impacto el brazo está colocado en ángulo recto
con la palma de la mano paralela al piso, ubicándose en el mismo plano el hombro, el codo y
el puño, este último con la palma de la mano paralela al piso. Este golpe logra su mayor
efectividad colocando ambas piernas en posición paralela, a ambos lados del blanco.
E. El HOOK: al igual que el uppercut, es un golpe curvo y ascendente, con ambas manos,
que va de abajo hacia arriba simultáneamente con una torsión lateral del cuerpo (si es de
izquierda se gira hacia la derecha y arriba, e inversamente si fuera de derecha). Se trata del
único golpe con aplicación tanto en la media como en la corta distancia, y tiene como blanco
la parte lateral del cuerpo del rival.
F. El UPPERCUT: es un golpe aplicable con ambas manos, netamente ascendente y de
trayectoria corta que busca impactar en el centro del abdomen del rival, y por ello limitado a
la corta distancia, dado que necesita la máxima proximidad del blanco. ”(C.U.B.A, s. f.)
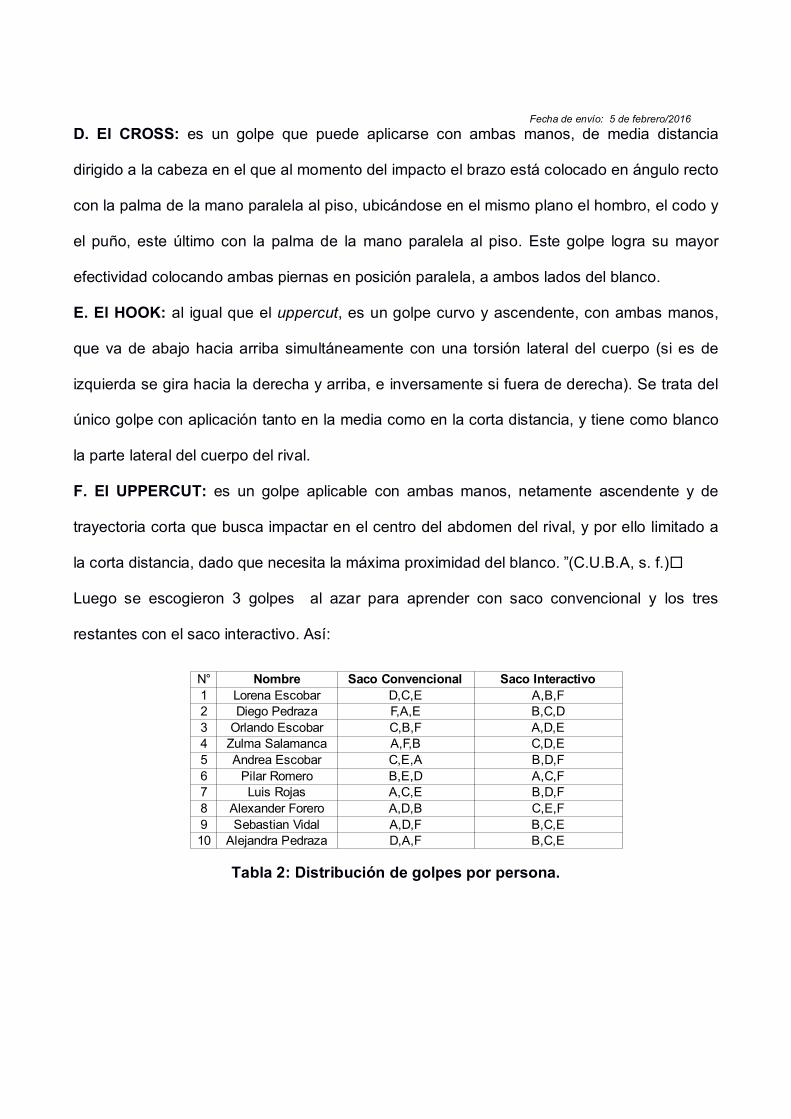
Luego se escogieron 3 golpes al azar para aprender con saco convencional y los tres
restantes con el saco interactivo. Así:
Tabla 2: Distribución de golpes por persona.
N° Nombre Saco Convencional Saco Interactivo1 Lorena Escobar D,C,E A,B,F2 Diego Pedraza F,A,E B,C,D3 Orlando Escobar C,B,F A,D,E4 Zulma Salamanca A,F,B C,D,E5 Andrea Escobar C,E,A B,D,F6 Pilar Romero B,E,D A,C,F7 Luis Rojas A,C,E B,D,F8 Alexander Forero A,D,B C,E,F9 Sebastian Vidal A,D,F B,C,E10 Alejandra Pedraza D,A,F B,C,E

Fecha de envío: 5 de febrero/2016
Se iniciaron entrenamientos con cada persona de una hora, donde se empieza con movilidad
articular, calentamiento luego las clases de boxeo, a continuación vamos a observar el
proceso de los entrenamientos.
Tabla 3: Entrenamientos modo convencional.
Técnica básica: posición y rotación del cuerpo para cada golpe, volver a posición de guardia
al finalizar golpe.
N° Nombre Saco Convencional1° Entrenamiento 2° Entrenamiento 3° Entrenamiento 4° Entrenamiento
1 Lorena Escobar Posturas básicas y guardia Swing, técnica básica. Cross, técnica básica. Hook, técnica básica2 Diego Pedraza Posturas básicas y guardia Directo, técnica básica Hook, técnica básica Uppercut, técnica básica3 Orlando Escobar Posturas básicas y guardia Jab, técnica básica Swing, técnica básica. Uppercut, técnica básica4 Zulma Salamanca Posturas básicas y guardia Directo, técnica básica Jab, técnica básica Uppercut, técnica básica5 Andrea Escobar Posturas básicas y guardia Directo, técnica básica Swing, técnica básica. Hook, técnica básica6 Pilar Romero Posturas básicas y guardia Jab, técnica básica Cross, técnica básica. Hook, técnica básica7 Luis Rojas Posturas básicas y guardia Directo, técnica básica Cross, técnica básica. Hook, técnica básica8 Alexander Forero Posturas básicas y guardia Directo, técnica básica Jab, técnica básica Cross, técnica básica.9 Sebastian Vidal Combinación D, D, A, F, D, F, A, A, D, F Golpes acertados10 Alejandra Pedraza Posturas básicas y guardia Directo, técnica básica Cross, técnica básica. Uppercut, técnica básica
Saco Convencional5° Entrenamiento 6° Entrenamiento 7° Entrenamiento
Swing, Cross: puntos de impacto Tres golpes: puntos de impacto Mecanizar golpesHook, Uppercut: puntos de impacto Tres golpes: puntos de impacto Mecanizar golpesJab, Uppercut: puntos de impacto Tres golpes: puntos de impacto Golpes AcertadosJab, Uppercut: puntos de impacto Tres golpes: puntos de impacto Tres golpes: puntos de impactoSwing, Hook: puntos de impacto Tres golpes: puntos de impacto Tres golpes: puntos de impacto
Jab, Cross: Combinación general Tres golpes: puntos de impacto Tres golpes: puntos de impactoCross, Hook: puntos de impacto Tres golpes: puntos de impacto Tres golpes: puntos de impactoJab, Cross: Combinación general Tres golpes: puntos de impacto Tres golpes: puntos de impacto
Cross, Uppercut: puntos de impacto Tres golpes: puntos de impacto Mecanizar golpes
Saco Convencional8° Entrenamiento 9° Entrenamiento 10° Entrenamiento
Golpes AcertadosGolpes Acertados
Mecanizar golpes Mecanizar golpes Golpes AcertadosMecanizar golpes Golpes Acertados Golpes AcertadosMecanizar golpes Golpes Acertados Golpes Acertados
Tres golpes: puntos de impacto Mecanizar golpes Golpes AcertadosMecanizar golpes Golpes Acertados
Golpes Acertados
Fecha de envío: 5 de febrero/2016
Puntos de impacto: Lugares específicos donde debe acertar el golpe lanzado, rectificación de
técnica.
Combinación general: Técnica usada como la combinación básica.
Al observar las tablas se encontraron datos importantes, las personas que practican algún
tipo de actividad física aprenden un poco más rápido, ya que los músculos poseen una
memoria que les permite controlar fácilmente su cuerpo y mecanizar movimientos.
En el caso de Andrea Escobar fue difícil lograr captar su atención durante una hora completa,
por este motivo se tardó un poco más en acerar los golpes.
El promedio de entrenamiento usado para lograr total dominio de los golpes fue de 8 por que
el primer entrenamiento se usó para técnicas básicas principales de postura y guardia por lo
tanto esta no se contó, Los dos tiempos menores fueron logrados por Diego Pedraza y
Orlando Escobar con un total de 7 entrenamientos.
En el caso de Sebastian Vidal, se le adjudico una combinación con tres golpes en la cual se
demoró 4 días en dominar.
A continuación, se muestra el proceso de entrenamiento con el saco de boxeo interactivo,
donde el tiempo fue administrado por cada persona en un entrenamiento individual, se les
indico la técnica básica de cada golpe y luego se le dio total libertad al usuario para que
entrenara a su ritmo:

Fecha de envío: 5 de febrero/2016
Tabla 3: Entrenamientos con saco interactivo.
Como se hace evidente todos las personas del estudio disminuyeron el número de
entrenamientos que necesitaron para aprender estos tres nuevos golpes el promedio en este
caso es de 6, un cambio importante fue Andrea, que realizo los entrenamientos a manera de
juego interiorizando todas las técnicas más rápido.
Todos los deportistas en general tienen un espíritu muy competitivo, al usar el saco y ver los
resultados arrojados en cada entrenamiento, provoco que cada uno ellos quisiera mejorar y
superarse cada día
.
4 Conclusiones
La primera consideración estuvo basada en ubicar los puntos de impacto donde se
encuentran los sensores y puntos de luz. Los cuales están directamente relacionados con la
N° Nombre Saco Interactivo1° Entrenamiento 2° Entrenamiento 3° Entrenamiento
1 Lorena Escobar Directo, técnica básica Jab, técnica básica Uppercut, técnica básica2 Diego Pedraza Jab, técnica básica Swing, técnica básica. Cross, técnica básica.3 Orlando Escobar Directo, técnica básica Cross, técnica básica. Hook, técnica básica4 Zulma Salamanca Swing, técnica básica. Cross, técnica básica. Hook, técnica básica5 Andrea Escobar Jab, técnica básica Cross, técnica básica. Uppercut, técnica básica6 Pilar Romero Directo, técnica básica Cross, técnica básica. Uppercut, técnica básica7 Luis Rojas Jab, técnica básica Cross, técnica básica. Uppercut, técnica básica8 Alexander Forero Swing, técnica básica. Hook, técnica básica Uppercut, técnica básica9 Sebastian Vidal Combinación C, C, B, E, C, E, B, B, D , F Golpes acertados10 Alejandra Pedraza Swing, técnica básica. Hook, técnica básica Uppercut, técnica básica
Saco Interactivo4° Entrenamiento 5° Entrenamiento 6° Entrenamiento 7° Entrenamiento
Tres golpes: puntos de impacto Golpes AcertadosTres golpes: puntos de impacto Golpes AcertadosTres golpes: puntos de impacto Golpes AcertadosTres golpes: puntos de impacto Tres golpes: puntos de impacto Mecanizar golpes Golpes AcertadosTres golpes: puntos de impacto Tres golpes: puntos de impacto Golpes AcertadosTres golpes: puntos de impacto Mecanizar golpes Golpes AcertadosTres golpes: puntos de impacto Mecanizar golpes Golpes AcertadosTres golpes: puntos de impacto Tres golpes: puntos de impacto Mecanizar golpes Golpes Acertados
Tres golpes: puntos de impacto Golpes Acertados

Fecha de envío: 5 de febrero/2016
anatomía humana para tener golpes acertados en las partes donde se ocasiona mayor daño,
es importante tener en cuenta la efectividad de los golpes que se ejecutan. El proyecto
mejora en gran cantidad la destreza y eficacia en los movimientos de los deportistas.
Se pudo evidenciar la disminución en el tiempo requerido para aprender y ejecutar
correctamente los golpes, ya que se produjo una optimización de los entrenamientos
individuales, tener la capacidad de entrenar al ritmo personal y tener datos numéricos del
proceso funciona como motivación y genera aumento en el interés del entrenamiento ya que
cambia la percepción de este en una forma más didáctica.
Hacer uso de la tecnología que tiene mayor acogida en el momento provoca en las personas
un gran interés, ya que proporciona a esta interfaz un ambiente conocido y puede ser
controlada fácilmente; se encuentran usuarios que desean otra opción, para estos se realizo
un mando sencillo y convencional ubicado cerca al saco con las mismas funciones de la
aplicación.
El microcontrolador Arduino es una excelente opción para este tipo de proyectos educativos,
es muy completo en sus módulos de funcionamiento, proporciona una mayor y efectiva
funcionalidad de los componentes que se le deseen acoplar lo cual asegura que estos sirvan
correctamente.

Fecha de envío: 5 de febrero/2016
Referencias
Acheron, P. (2012). SACO DE BOXEO INERACTIVO CON ARDUINOS. Recuperado 1 de abril de 2015, a partir de https://tecnotronica.wordpress.com/2012/01/13/saco-box-con-arduinos/
C.U.B.A. (s. f.). PLAN DE TRABAJO PARA LA ENSEÑANZA Y PRÁCTICA DEL BOXEO. Recuperado a partir de http://www.cuba.org.ar/imgs/deportes/boxeo/manual.pdf
iPunch. (2014). Recuperado 3 de abril de 2015, a partir de http://www.ipunch.com/
Lafayette. (2015). TEXSOLUTIONS. Recuperado 6 de enero de 2015, a partir de http://www.lafayettetexsolutions.com/
Parekh, A. (s. f.). Interactive Punching Bag. Recuperado 1 de abril de 2015, a partir de http://hackedgadgets.com/2011/03/06/interactive-punching-bag-arduino-based/
SL, B. (2012). Slamman. Recuperado a partir de http://www.slamman.es/como-funciona.html