future z
DESCRIPTION
revista informativa universitariaTRANSCRIPT

FUTURE
MAGAZINE

Transformada Z:
La transformada Z, al igual que otras
transformaciones integrales, puede ser
definida como una transformada
unilateral o bilateral, el papel de la
transformada z en los sistemas
discretos es similar al de la
transformada de laplace en los sistemas
continuos. La transformada Z de una
función en tiempo continuo X(t), solo
se toman los valores muestreados de
X(t), esto es X(0), X(T), X(2T),……,
donde T es el período de muestreo. La
Transformada Zeta (TZ) se emplea en
el estudio del Procesamiento de
señales Digitales, como son el análisis y
proyecto de Circuitos Digitales, los
Sistemas de Radar o
Telecomunicaciones y especialmente
los Sistemas de Control de Procesos
por computadoras.
Pág.. 1

Funciones Elementales
La aplicación de la transformada Z se demuestra
calculando la Transformada Z de Funciones Elementales
tales como escalón unitario, rampa unitaria, exponencial.
Es importante resaltar la
aplicación de cada
propiedad con Ejemplos
en particular el Teorema
de Corrimiento el cual
representa básicamente
el desplazamiento de una
señal y su respectiva
transformada Z.
Pág.. 2
Teoremas y propiedades
de la transformada Z
El uso de la Transformada Z
puede facilitar las
propiedades y teoremas de
ésta, las cuales se basan y se
obtienen de la definición. Se
supone que la función del
tiempo x(t) tiene
transformada z y que x(t) es
cero (0) para t<0.

Pág.. 3
Teorema de traslación real.
Siendo n un entero no negativo (positivo o cero),
entonces
y
Teorema de traslación compleja.
Si x ( t ) tiene la transformada z, X( z ) , entonces la
transformada z de
viene dada por
Teorema del valor inicial.
Si x ( t ) tiene por transformada z, X( z ) , y si el
existe, entonces el valor inicial x ( 0) de x ( t ) ó x ( k )
está dado por
Pág.. 4
El teorema del valor inicial es
conveniente para verificar la
incidencia de posibles
errores en el cálculo de la
transformada z. Debido a que x
( 0) se suele conocer,
comprobar su valor mediante
el límite ayuda a descubrir
errores en la transformada z, si
éstos se producen.

Pág.. 5
Teorema del valor final.
Suponemos que x (kT) , siendo T
el periodo de muestreo, tiene la
transformada
z, X ( z ) , con x (kT) = 0 para
valores negativos de k, y que
todos los polos de
X(z ) están dentro del círculo
unitario, con la posible excepción
de un sólo polo en
z = 1. Esta es la condición para
la estabilidad de X ( z ) , es
decir, la condición para que
x(kT) (k = 0, 1, 2...) permanezca
finita. Entonces el valor final de x
(kT) , que es su
valor conforme el tiempo
tiende a infinito, puede
obtenerse mediante
El teorema del valor final
es muy útil para
determinar el
comportamiento de
x(k ) a medida que k
tiende a infinito, a partir de
su transformada z, X ( z )
Transformada Z unilateral
Consideraremos la definición de la
Transformada Z Unilateral, la cual
al muestrear una señal discontinua
x(t), se supone que la señal es
continua por la derecha. De forma
alternativa, en los casos en que
x[n] está definida únicamente para
n ≥ 0, la transformada Z unilateral
se define como
En el procesamiento de señales, se usa esta definición cuando la
señal es causal. En este caso, la Transformada Z resulta una serie
de Laurent, con ROC del tipo | z | > R ; es decir que converge
"hacia afuera".
Un ejemplo interesante de la TZ unilateral es la función de
generación de probabilidades, donde x[n] es la probabilidad que
toma una variable discreta aleatoria en el instante n, y la función
X(z) suele escribirse como X(s), ya que s = z−1. Las propiedades
de las transformadas Z son útiles en la teoría de la probabilidad
La transformada z
representa el proceso de
muestreo de una señal.
Así como se puede
determinar la transformada Z
de una función continua
también podemos determinar
la transformada de Z de una
Función definida en Laplace,
ya que esta representa una
función de tiempo continuo.
Pág.. 6

Transformada Z bilateral
La TZ bilateral de una señal definida en el
dominio del tiempo discreto x[n] es una función
X(z) que se define
Donde n es un entero y z es, en
general, un número complejo de la
forma z = Aejω
Donde A es el módulo de z, y ω es
la frecuencia angular en radianes
por segundo (rad/s).
Pág.. 7

Transformada Z inversa
La notación de la transformada Z inversa es Z-1.
la transformada z de inversa de X(z) da como resultado la
correspondiente secuencia x(k) o x(t).A partir de la
transformada z inversa de X(z) da como resultado una
única x(k), pero no da una única x(t). La secuencia de
tiempo x(kT) o x(k) es cero para k<0.
La Transformada Z inversa se define
donde C es un círculo
cerrado que envuelve el
origen y la región de
convergencia (ROC). El
contorno, C, debe contener
todos los polos x(z).
Un caso especial y simple de
esta integral circular es que
cuando C es el círculo unidad
(que también puede usarse
cuando la ROC incluye el
círculo unidad), obtenemos la
transformada inversa de
tiempo discreto de Fourier:
La TZ con un rango finito de n y
un número finito de z separadas
de forma uniforme puede ser
procesada de forma eficiente
con el algoritmo de Bluestein. La
transformada discreta de
Fourier (DFT) es un caso
especial de la TZ, y se obtiene
limitando z para que coincida
con el círculo unidad.
Pág.. 8

Métodos para Obtener la
Transformada Z Inversa.
Método de la División
Directa
Se obtiene mediante la
expansión de x (z) en un serie
infinita de potencia Z-1, este
método es útil cuando es difícil
obtener la expresión en forma
cerrada para la transformada Z
inversa o cuando desea
encontrar sólo algunos de los
1ros términos de x(K).
Este método se utiliza cuando es difícil encontrar una expresión
en forma cerrada de la transformada z inversa o si se desea
encontrar sólo algunos de los primeros términos de x(k)
Método Computacional
Se presentan 2 enfoques para determinar la
transformada z:
· Enfoque de MATLAB
· Ecuación en Diferencias.
Pág.. 9
Matlab.
Se puede utilizar Matlab para determinar la tranformada z
inversa. A partir de una ecuación específica. Este software
tiene una cantidad de funciones y órdenes muy útiles para
resolver problemas de Ingeniería de Control tanto para
sistemas continuos como para sistemas discretos.
Una vez que se ha estudiado los aspectos teóricos se
puede utilizar MATLAB ya que tiene como ventaja que
produce soluciones numericas que implican varios tipos
de operaciones incluyendo vectores y matrices.
Ecuación en Diferencias.
Para determinar la transformada z inversa utilizando este
enfoque se deben seguir los siguientes pasos:
• Dada la función (Por ejemplo G(z)) donde su entrada es
la función Delta Kronecker, se linealiza la función,
relacionando la entrada con la salida.
• A la función linealizada le aplicamos el Teorema de
Corrimiento y obtenemos una ecuación en diferencias.
• En la ecuación en diferencias sustituimos para los
valores de k que nos permitan encontrar los datos
iniciales y(0) y y(1)
Pág.. 10

Para encontrar la transformada z inversa, si X(z) tiene uno
o más ceros en el origen (z=0), entonces X(z)/z o x(z) se
expande en la suma de términos sencillos de primer o
segundo orden mediante expansión en fracciones parciales
y se emplean una tabla de transformada z para encontrar
x(t) en cada uno de los términos expandidos.
Antes de estudiar el Método es indispensable realizar un
repaso del Teorema de Corrimiento de la Transformada z,
ya que esta es una herramienta indispensable al aplicar
Fracciones Parciales.
Método de Fracciones
Parciales
Este mètodo se aplica
igual que el de
Transformada de Laplace,
es muy empleado en
problemas rutinarios de
transformadas z. El
Método requiere que
todos los términos de las
expansiones parciales se
puedan reconocer
fácilmente en la tabla de
pares de Transformada Z.
Pág.. 11
Método de la Integral de Inversión
Esta es una técnica util para la obtención de la
transformada z inversa. Está basada en la
definición de la Integral de Inversión la cual da
como resultado Residuos de la función X(z)zk-1,
asi se puede definir que :
Z[x(t)] = x(k) = K1 + K2 + K3 + ........... Km
Donde K1, K2, K3 ........... Km son los residuos de
los polos de la función X(z)zk-1
Debe observarse que el método de la integral
de inversión se evalua por residuos, siempre y
cuando la función X(z)zk-1 no tenga polos en el
origen (z=0).
Pág.. 12

Región de convergencia (ROC)
Como se puede observar, la transformada
z se puede expresar como una serie de
potencias infinita y existe sólo para
aquellos valores de z para los cuales
converge la
serie. De esta forma, se define la región de
convergencia (ROC) de X(z) como el
conjunto de todos los valores de z para los
cuales X(z) adquiere valores finitos.
Siempre que se calcule la transformada z
de una secuencia, se debe también indicar
su correspondiente ROC , esta define la
región donde la transformada-z existe.
Propiedades de la Región de Convergencia:
La región de convergencia tiene propiedades que
dependen de la características de la señal, x[n].1.La ROC no tiene que contener algún polo.Por
definición un polo es donde x[z] es infinito. Ya que
x[z] tiene que ser finita para todas las z para tener
convergencia, no puede existir ningún polo para
ROC.
Pág.. 13
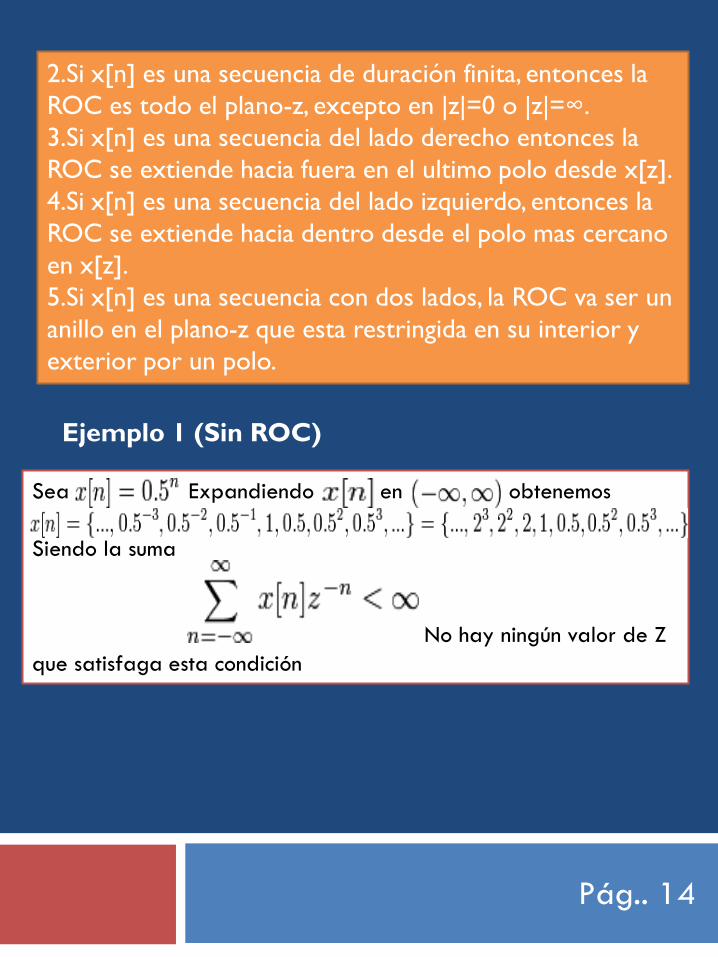
2.Si x[n] es una secuencia de duración finita, entonces la
ROC es todo el plano-z, excepto en |z|=0 o |z|=∞.
3.Si x[n] es una secuencia del lado derecho entonces la
ROC se extiende hacia fuera en el ultimo polo desde x[z].
4.Si x[n] es una secuencia del lado izquierdo, entonces la
ROC se extiende hacia dentro desde el polo mas cercano
en x[z].
5.Si x[n] es una secuencia con dos lados, la ROC va ser un
anillo en el plano-z que esta restringida en su interior y
exterior por un polo.
Ejemplo 1 (Sin ROC)
Sea Expandiendo en obtenemos
Siendo la suma
No hay ningún valor de Z
que satisfaga esta condición
Pág.. 14

Ejemplo 2 (ROC causal)
Sea (donde u es la
función escalón). Expandiendo en
obtenemos
Siendo la suma
La última igualdad se obtiene con
la fórmula del sumatorio para
series geométricas, y la igualdad
sólo se conserva si lo
cual puede ser reescrito para
definir Z de modo Por lo
tanto, la ROC es bn En este
caso la ROC es el plano complejo
exterior al círculo de radio 0,5
con origen en el centro.
ROC muestra en azul, el circulo es un
punto gris y el círculo muestra del círculo.
Pág.. 15

Ejemplo 3 (ROC anticausal)
Sea
(donde u es la función escalón).
Expandiendo entre
obtenemos:
Siendo la suma
De nuevo, usando la fórmula de sumatorio
para series geométricas, la iguadad sólo se
mantiene si de modo que podemos
definir Z como Aquí, la ROC es
es decir, el interior de un círculo centrado en el
origen de radio 0,5.
Pág.. 16
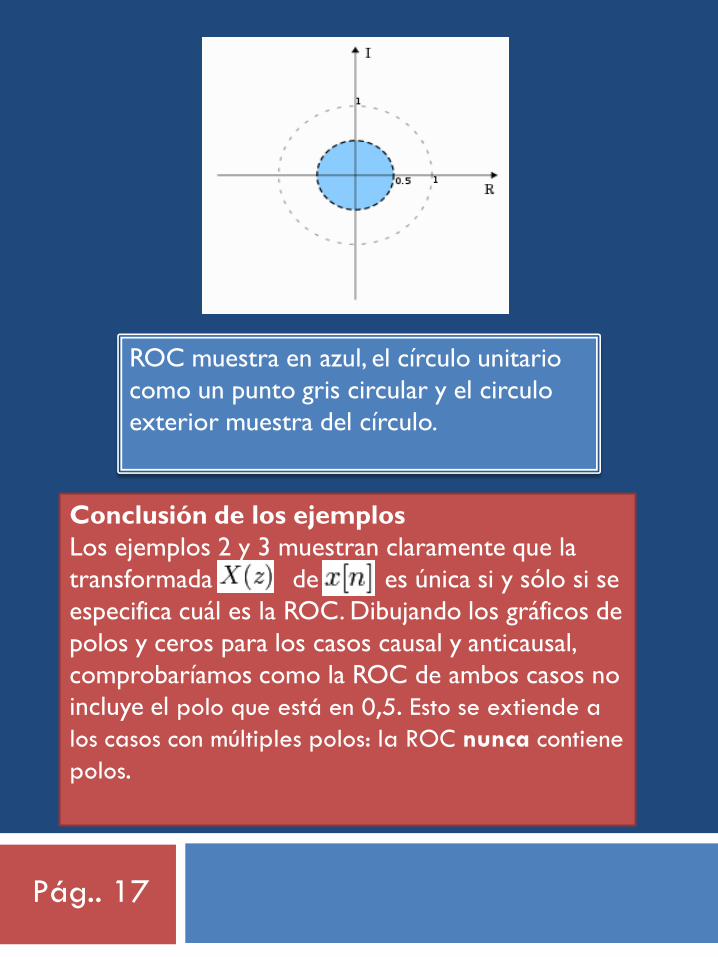
ROC muestra en azul, el círculo unitario
como un punto gris circular y el circulo
exterior muestra del círculo.
Conclusión de los ejemplos
Los ejemplos 2 y 3 muestran claramente que la
transformada de es única si y sólo si se
especifica cuál es la ROC. Dibujando los gráficos de
polos y ceros para los casos causal y anticausal,
comprobaríamos como la ROC de ambos casos no
incluye el polo que está en 0,5. Esto se extiende a
los casos con múltiples polos: la ROC nunca contiene
polos.
Pág.. 17
En el ejemplo 2, el sistema causal tiene una ROC que
incluye , mientras que al sistema anticausal del
ejemplo 3 le pertenece una ROC que incluye .
La estabilidad de un sistema se puede determinar
simplemente conociendo su ROC. Si esta ROC contiene el
círculo unidad (p. ej. ) entonces el sistema es
estable. En los sistemas anteriores, el sistema causal es
estable porque contiene el círculo unidad.
Si tenemos la TZ de un sistema sin su ROC (p.ej.,
un ambiguo) podemos determinar una única
señal en función de que queramos o no las
siguientes propiedades:
.Estabilidad
.Causalidad
Si queremos un sistema estable, la ROC debe
contener el círculo unidad. Si queremos un sistema
causal, la ROC debe contener al infinito. Si
queremos un sistema anticausal, la ROC debe
contener al origen.
De este modo, podemos encontrar una señal en el
tiempo que sea única.
Pág.. 18

Propiedades
Linealidad: La TZ de una
combinación lineal de dos
señales en el tiempo es la
combinación lineal de sus
transformadas en Z.
Desplazamiento temporal:
Un desplazamiento de k hacia
la derecha en el dominio del
tiempo es una multiplicación
por z−k en el dominio de Z.
Convolución: La TZ de la
convolución de dos señales en
el tiempo es el producto de
ambas en el dominio de Z.
Pág.. 19

Pág.. 20
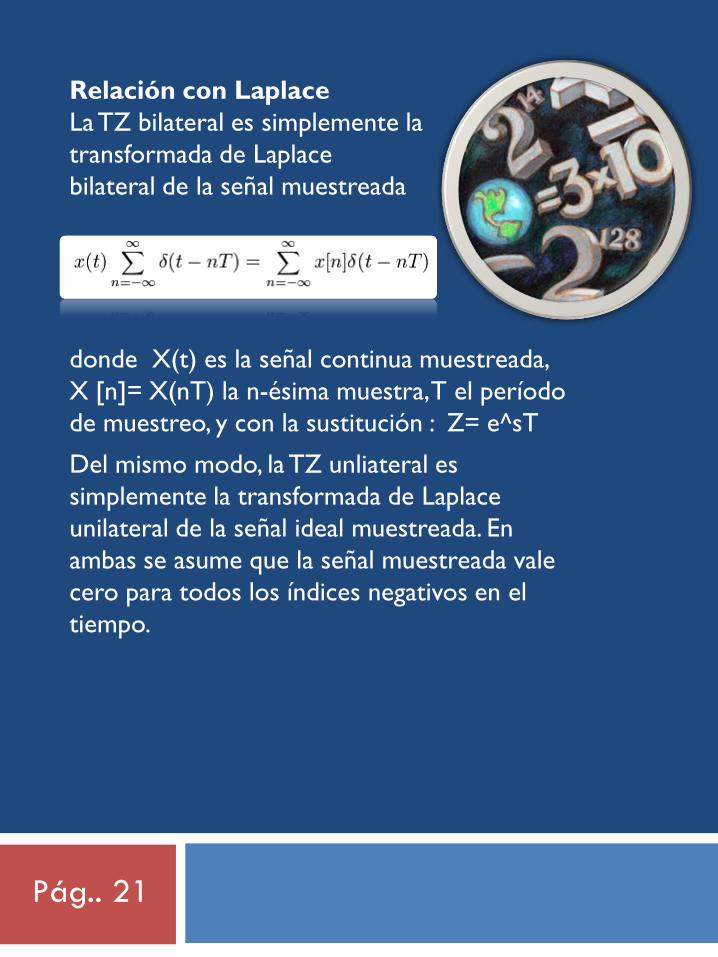
donde X(t) es la señal continua muestreada,
X [n]= X(nT) la n-ésima muestra, T el período
de muestreo, y con la sustitución : Z= e^sT
Del mismo modo, la TZ unliateral es
simplemente la transformada de Laplace
unilateral de la señal ideal muestreada. En
ambas se asume que la señal muestreada vale
cero para todos los índices negativos en el
tiempo.
Relación con Laplace
La TZ bilateral es simplemente la
transformada de Laplace
bilateral de la señal muestreada
Pág.. 21

Relación con Fourier
La TZ es una
generalización de la
transformada de Fourier
de tiempo discreto
(DTFT). La DTFT puede
hallarse evaluando la TZ
X(z) en z=℮^jw o, lo que
es lo mismo, evaluada en
el círculo unidad. Para
determinar la respuesta
en frecuencia del sistema,
la TZ debe ser evaluada
en el círculo unidad.
¿SABIAS QUE?
Jean-Baptiste-Joseph
Fourier, fue
un matemático y físico francés
conocido por sus trabajos sobre
la descomposición de funciones
periódicas en series
trigonométricas convergentes
llamadas Series de Fourier,
método con el cual consiguió
resolver la ecuación del calor.
La transformada de
Fourier recibe su nombre en su
honor. Fue el primero en dar una
explicación científica al efecto
invernadero en un tratado. Se le
dedicó un asteroide que lleva su
nombre y que fue descubierto
en1992.
Pág.. 22

Aplicaciones en la vida Real
de la transformada Z
Es utilizada en el procesamiento
de imágenes digitales. como por
ejemplo los televisores de alta
definición y las cámaras digitales
Pág.. 23
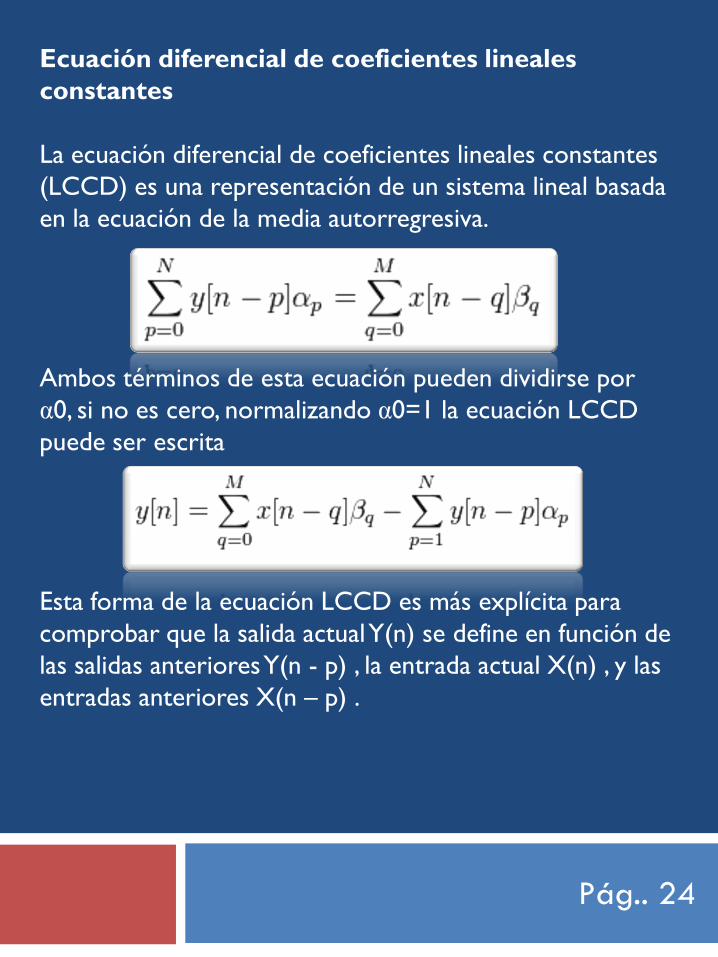
Ecuación diferencial de coeficientes lineales
constantes
La ecuación diferencial de coeficientes lineales constantes
(LCCD) es una representación de un sistema lineal basada
en la ecuación de la media autorregresiva.
Ambos términos de esta ecuación pueden dividirse por
α0, si no es cero, normalizando α0=1 la ecuación LCCD
puede ser escrita
Esta forma de la ecuación LCCD es más explícita para
comprobar que la salida actual Y(n) se define en función de
las salidas anteriores Y(n - p) , la entrada actual X(n) , y las
entradas anteriores X(n – p) .
Pág.. 24

Función de transferencia
Se calcula haciendo la TZ de la ecuación
y dividiendo
Pág.. 25

Ceros y polos
Gracias al teorema fundamental del álgebra sabemos que
el numerador tiene M raíces (llamadas ceros) y el
denominador tiene N raíces (llamadas polos).
Factorizando la función de transferencia
Donde qk es el k-ésimo cero y pk es el k-ésimo polo.
Los ceros y polos son por lo general complejos, y por
tanto se pueden dibujar en el plano complejo.
En definitiva, los ceros son las soluciones de la ecuación
obtenida de igualar el numerador a cero, mientras que
los polos son las de la ecuación que se obtiene al igualar
a cero el denominador.
Se puede factorizar el denominador
mediante la descomposición en
fracciones simples, las cuales pueden
ser transformadas de nuevo al
dominio del tiempo. Haciendo esto
obtenemos la respuesta al impulso y
la ecuación diferencial de coeficientes
lineales constantes del sistema.
Pág.. 26

Grafica Simple de Polos y Ceros
H(z)=z(z−1/2)(z+3/4)
Los ceros son: {0}
Los polos son: {1/2,−3/4}
Graficas de Polos y Ceros
Figura: Usando los ceros y polos de la funcion de
transferencia, un cero es graficado a el valor cero y los
dos polos se colocan en 1/2 y −3/4
Pág.. 27

Salida del sistema
Si por un sistema H(z) pasa una señal X(z) entonces la
salida será Y(z) =H(Z) X(z) . Haciendo una
descomposición en fracciones simples de Y(z) y la TZ
inversa de cada una de ellas puede encontrarse
entonces la salida Y(n)
Región de convergencia de la transformada z.
Como se puede observar, la transformada
z se puede expresar como una serie de
potencias infinita y existe sólo para
aquellos valores de z para los cuales
converge la
serie. De esta forma, se define la región de
convergencia (ROC) de X(z) como el
conjunto de todos los valores de z para
los cuales X(z) adquiere valores finitos.
Siempre que se calcule la transformada z
de una secuencia, se debe también indicar
su correspondiente ROC. En el ejemplo 1,
X(z) toma valores finitos para todo z
excepto para el punto z=0, y por tanto la
ROC se define como C-{0}
Pág.. 28

Editorial; Chivayork Escritores C.A
Director técnico: Alfredo Santiago
Diseñador grafico: Teomar Arrieche
Director Ejecutivo: Rainier Brown
Fotografías: Daniela Colmenarez
Supervisor de Redacción: Luis Leal
Primera Edición, FUTURE Z MAGAZINE
Escuela de Ingeniería Eléctrica
Cabudare, Agosto 2011