fisica trabajo
TRANSCRIPT

República Bolivariana de Venezuela
Ministerio del Poder Popular Para la Educación
Instituto Universitario de Tecnología Antonio José de Sucre
Barquisimeto – Edo; Lara
Integrantes:
Giménez José C.I 17.782.024
Peñuela Víctor C.I 18.812.950Revisado por:
Marienny ArriecheSección A
Octubre 2011
Introducción

Este trabajo será realizado con la finalidad de conocer el contenido de masa-resorte, sus elementos y posiciones de equilibrio, otro punto muy importante que trataremos es el péndulo simple y oscilaciones, amplitud, período y frecuencia la relación entre frecuencia y periodo, desarrollaremos leyes importantes como la ley del péndulo, ley de masas, ley del Isócrono, la Hidrostática, Principio de Pascal, Principio de Arquímedes, Aceleración Angular Constante, Relación entre cantidades angulares y lineales tipos de mecánica, como la mecánica newtoniana, Mecánica lagrangiana y hamiltoniana. El Movimiento de Inercia y Energía Rotacional el Momento Torsión y aceleración angular el Teorema de Steiner o teorema de los ejes paralelos, el Movimiento Armónico Simple entre otros puntos importantes en la física que son buenos conocer para el día a día en los ámbitos laborales.
SISTEMA MASA-RESORTE

Movimiento Armónico Simple es el sistema masa-resorte que consiste en una masa “m” unida a un resorte, que a su vez se halla fijo a una pared, como se muestra en la figura. Se supone movimiento sin rozamiento sobre la superficie horizontal.
El resorte es un elemento muy común en máquinas. Tiene una longitud normal, en ausencia de fuerzas externas. Cuando s

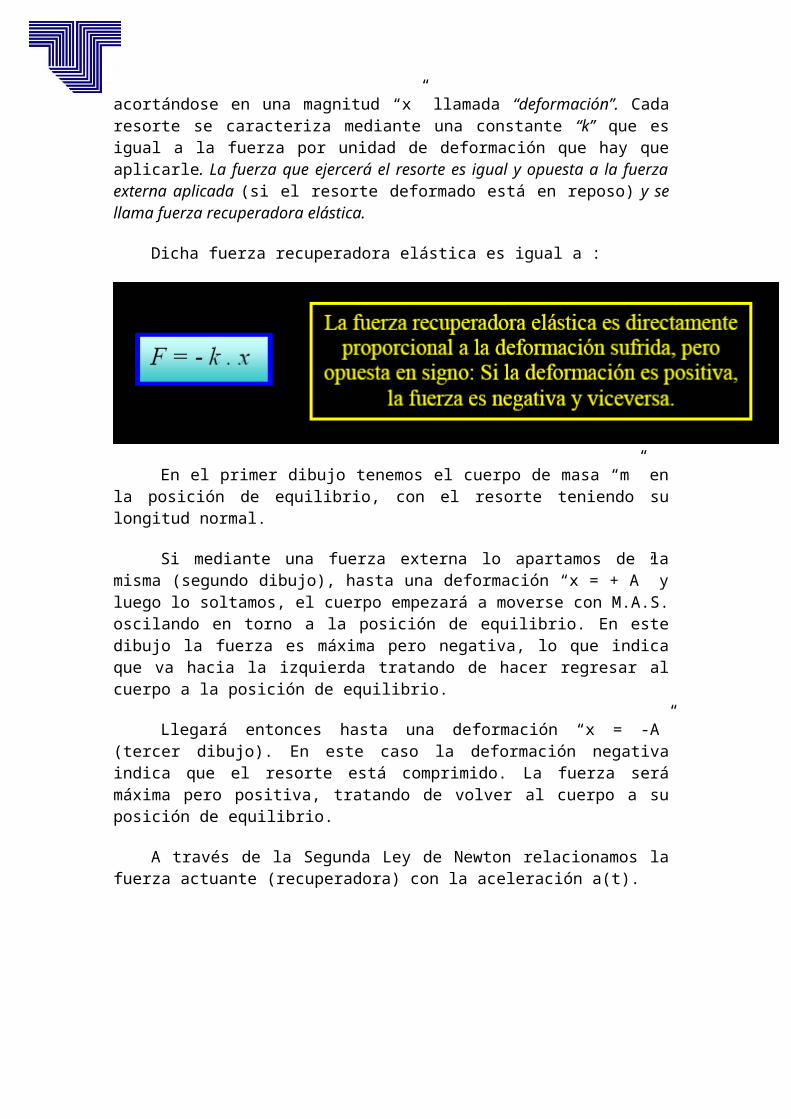
El resorte es un elemento muy común en máquinas. Tiene una longitud normal, en ausencia de fuerzas externas. Cuando se le aplican fuerzas se deforma alargándose o acortándose en una magnitud “x” llamada “deformación”. Cada resorte se caracteriza mediante una constante “k” que es igual a la fuerza por unidad de deformación que hay que aplicarle. La fuerza que ejercerá el resorte es igual y opuesta a la fuerza externa aplicada (si el resorte deformado está en reposo) y se llama fuerza recuperadora elástica.
Dicha fuerza recuperadora elástica es igual a :
En el primer dibujo tenemos el cuerpo de masa “m” en la posición de equilibrio, con el resorte teniendo su longitud normal.
Si mediante una fuerza externa lo apartamos de la misma (segundo dibujo), hasta una deformación “x = + A” y luego lo soltamos, el cuerpo empezará a moverse con M.A.S. oscilando en torno a la posición de equilibrio. En este dibujo la fuerza es máxima pero negativa, lo que indica que va hacia la izquierda tratando de hacer regresar al cuerpo a la posición de equilibrio.
Llegará entonces hasta una deformación “x = -A” (tercer dibujo). En este caso la deformación negativa indica que el resorte está comprimido. La fuerza será máxima pero positiva, tratando de volver al cuerpo a su posición de equilibrio.
A través de la Segunda Ley de Newton relacionamos la fuerza actuante (recuperadora) con la aceleración a(t).
Péndulo Simple y Oscilaciones
PÉNDULO: Llamamos péndulo a todo cuerpo que puede oscilar con respecto de un eje fijo.
Péndulo ideal, simple o matemático: Se denomina así a todo cuerpo de masa m (de pequeñas dimensiones) suspendido por medio de un hilo inextensible y sin peso. Estas dos últimas condiciones no son reales sino ideales; pero todo el estudio que
realizaremos referente al péndulo, se facilita admitiendo ese supuesto .
Péndulo físico: Si en el extremo de un hilo suspendido sujetamos un cuerpo cualquiera, habremos construido un péndulo físico. Por esto, todos los péndulos que se nos presentan (columpios, péndulo de reloj, una lámpara suspendida, la plomada) son péndulos físicos.
Oscilación - Amplitud - Período y Frecuencia:
A continuación estudiaremos una serie de procesos que ocurren durante la oscilación de los péndulos y que permiten enunciar las leyes del péndulo.
Daremos previamente los siguientes conceptos:
Longitud del péndulo (l) es la distancia entre el punto de suspensión y el centro de gravedad del péndulo.

Oscilación simple es la trayectoria descrita entre dos posiciones extremas (arco AB). Oscilación completa o doble oscilación es la trayectoria realizada desde una posición extrema hasta volver a ella, pasando por la otra extrema (arco ABA). Angulo de amplitud o amplitud (alfa) es el ángulo formado por la posición de reposo (equilibrio) y una de las posiciones extremas. Período o tiempo de oscilación doble (T) es el tiempo que emplea el péndulo en efectuar una oscilación doble. Tiempo de oscilación simple (t) es el tiempo que emplea el péndulo en efectuar una oscilación simple. Elongación (e). Distancia entre la posición de reposo OR y cualquier otra posición. Máxima elongación: distancia entre la posición de reposo y la posición extrema o de máxima amplitud. Frecuencia (f). Es el número de oscilaciones en cada unidad de tiempo.
f=numero de oscilaciones/tiempo
Relación entre frecuencia y periodo
T = período ; f = frecuencia
Supongamos un péndulo que en 1 seg. cumple 40 oscilaciones.
En consecuencia: 40 oscilaciones se cumplen en 1 seg., por lo que 1 osc. se cumple en T=1/40 seg (periodo) .
Obsérvese que: el período es la inversa de la frecuencia.
En símbolos: T=1/f y f=1/T
Leyes del péndulo:Ley de las masas
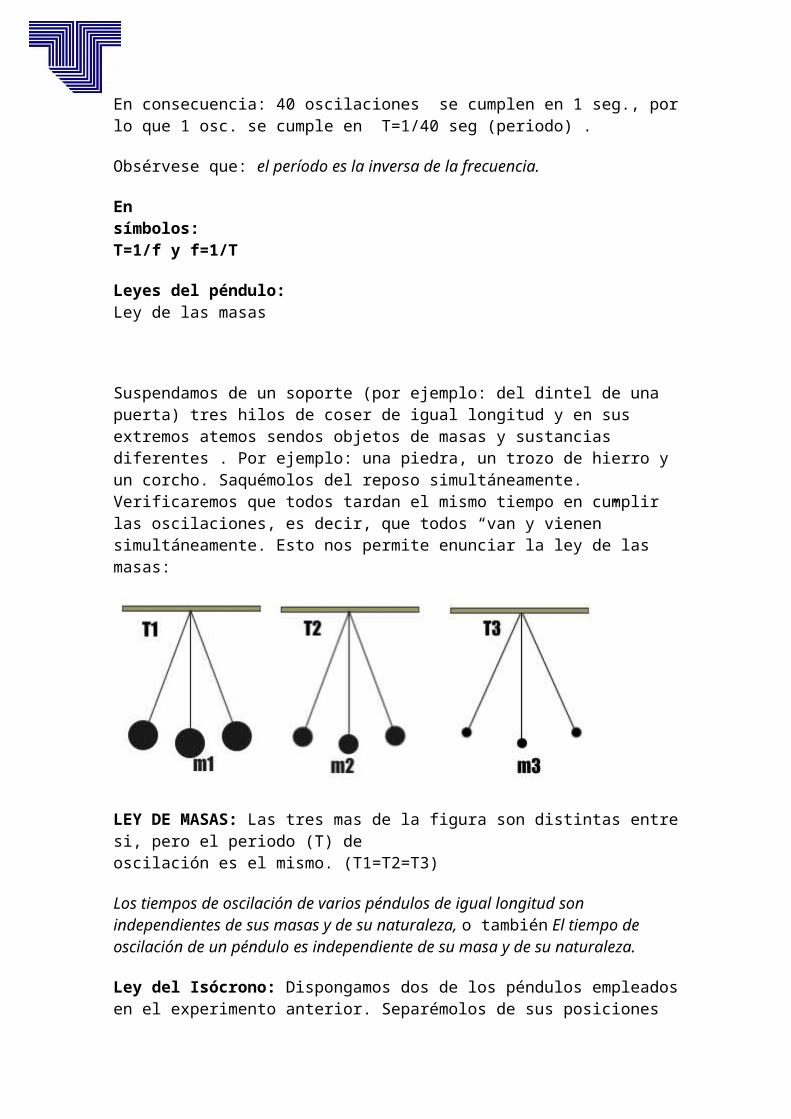
Suspendamos de un soporte (por ejemplo: del dintel de una puerta) tres hilos de coser de igual longitud y en sus extremos atemos sendos objetos de masas y sustancias diferentes . Por ejemplo: una piedra, un trozo de hierro y un corcho. Saquémolos del reposo simultáneamente. Verificaremos que todos tardan el mismo tiempo en cumplir las oscilaciones, es decir, que todos “van y vienen” simultáneamente. Esto nos permite enunciar la ley de las masas:
LEY DE MASAS: Las tres mas de la figura son distintas entre si, pero el periodo (T) de oscilación es el mismo. (T1=T2=T3)
Los tiempos de oscilación de varios péndulos de igual longitud son independientes de sus masas y de su naturaleza, o también El tiempo de oscilación de un péndulo es independiente de su masa y de su naturaleza.
Ley del Isócrono: Dispongamos dos de los péndulos empleados en el experimento anterior. Separémolos de sus posiciones de equilibrio, de tal modo que los ángulos de amplitud sean distintos (pero no mayores de 6 o 7 grados).
Dejémolos libres: comienzan a oscilar, y notaremos que, también en este caso, los péndulos “van y vienen” al mismo tiempo. De esto surge la llamada Ley del isocronismo (iguales tiempos):
Para pequeños ángulos de amplitud, los tiempos de oscilación de dos péndulos de igual longitud son independientes de las amplitudes, o también: El tiempo de oscilación de un péndulo es independiente de la amplitud (o sea, las oscilaciones de pequeña amplitud son isócronas).
La comprobación de esta ley exige que los pendulos tengan la misma longitud para determinar que en efecto los péndulos son isocronos*, bastarà verificar que pasan simultáneamente por la posiciòn de equilibrio. Se llegara notar que las amplitudes de algunos de ellos disminuyen mas que las de otros, pero observaremos que aquella situaciòn —el isocronismo— subsiste.
Si disponemos de un buen cronometro, podemos aun mejorar los resultados de esta experimentaciòn. Procedemos a tomar los tiempos empleados por cada uno, para 10 o 100 oscilaciones. Dividiendo esos tiempos por el número de oscilaciones obtendremos el de una sola (en casos de mucha precisiòn se llegan a establecer tiempos para 1.000, lo que reduce el error por cada oscilaciòn De este modo puede verificarse que en rea1id~ se cumple la ley. (*) lsòcronos tiempos iguales.
Hidrostática
La hidrostática tiene como objetivo estudiar los líquidos en reposo. Generalmente varios de sus principios también se aplican a los gases. El termino de fluido se aplica a líquidos
y gases por que ambos tienen propiedades comunes. No obstante conviene recordar que un gas puede comprimirse con facilidad, mientras un liquido es prácticamente incomprensible.
La presión (P) se relaciona con la fuerza (F) y el área (A) de la siguiente forma:
La ecuación básica de la hidrostática es la siguiente:
P = Po + ρgy
Siendo:
P: Presión total
Po: Presión superficial
ρ: Densidad del fluido
g: Intensidad gravitatoria de la Tierra
y: Altura neta
Las características de los líquidos son las siguientes: a) Viscosidad. Es una medida de la resistencia que opone un líquido a fluir. b) Tensión Superficial. Este fenómeno se presenta debido a la atracción entre moléculas de un líquido. c) Cohesión. Es la fuerza que mantiene unidas a las moléculas de una misma sustancia. d) Adherencia. Es la fuerza de atracción que se manifiesta entre las moléculas de dos sustancias diferentes en contacto. e) Capilaridad. Se presenta cuando existe contacto entre un líquido y una pared sólida, especialmente si son tubos muy delgados llamados capilares.
Principio de Pascal
El principio de Pascal es una ley enunciada por el físico y matemático francés Blaise Pascal (1623–1662) que se resume en la frase: «el incremento de la presión aplicada a una superficie de un fluido incompresible (generalmente se trata de un líquido incompresible), contenido en un recipiente indeformable, se transmite con el mismo valor a cada una de las partes del mismo». Es decir, que si se aplica presión a un liquido no comprimible en un recipiente cerrado, ésta se transmite con igual intensidad en todas direcciones y sentidos. Este tipo de fenómeno se puede apreciar, por ejemplo, en la prensa hidráulica o en el gato hidráulico; ambos dispositivos se basan en este principio. La condición de que el recipiente sea indeformable es necesaria para que los cambios en la presión no actúen deformando las paredes del mismo en lugar de transmitirse a todos los puntos del líquido.

Principio de Arquímedes
El principio de Arquímedes establece que cualquier cuerpo sólido que se encuentre sumergido total o parcialmente (depositado) en un fluido será empujado en dirección ascendente por una fuerza igual al peso del volumen del líquido desplazado por el cuerpo sólido. El objeto no necesariamente ha de estar completamente sumergido en dicho fluido, ya que si el empuje que recibe es mayor que el peso aparente del objeto, éste flotará y estará sumergido sólo parcialmente.
Aceleración Angular Constante
Se define la aceleración angular como el cambio que experimenta la velocidad angular por unidad de tiempo. Se denota por la letra griega alfa α. Al igual que la velocidad angular, la aceleración angular tiene carácter vectorial.
Se expresa en radianes por segundo al cuadrado, o s-2, ya que el radián es adimensional.
Definición matemática
Definimos el vector aceleración angular, y lo representamos por , de modo que
siendo el vector velocidad angular del cuerpo alrededor del eje de rotación. Si denominamos por el vector unitario asociado a dicho eje, de modo que sea , podemos escribir
resultando que, en general, el vector no está localizado sobre el eje de rotación.
En el caso particular de que el eje de rotación mantenga una orientación fija en el
espacio (movimiento plano), entonces será y el vector aceleración angular estará localizado sobre el eje de rotación. Esto es,
de modo que el módulo de la aceleración angular, , es la derivada de la celeridad angular con respecto al tiempo (o la derivada segunda del ángulo de rotación con respecto al tiempo), su dirección es la de cuando la celeridad angular aumenta con el tiempo, o si disminuye.
En el caso general, cuando el eje de rotación no mantiene una dirección fija en el
espacio, será , aunque , ya que el vector unitario del eje cambia de

dirección en el transcurso del movimiento. Puesto que es un versor, su derivada será un vector perpendicular a , esto es, al eje instantáneo de rotación.
Así pues, en el caso más general, la aceleración angular se expresará en la forma
siendo la velocidad angular asociada a la rotación del eje o precesión del eje de rotación (definido por ) en el espacio.
En la expresión anterior observaremos que el vector aceleración angular tiene dos componentes: una componente longitudinal (i.e., en la dirección del eje de rotación)
cuyo módulo es y una componente transversal (i.e., perpendicular al eje de rotación) cuyo módulo es .
Así pues, en general,
el vector no tendrá la misma dirección que el vector . el vector aceleración angular no tendrá la dirección del eje de rotación.
La dirección de la aceleración angular sólo coincide con la del vector velocidad angular, o sea, con el eje de rotación, en el caso de que dicho eje mantenga su orientación fija en el espacio, esto es, en el movimiento plano.
Relación entre cantidades angulares y lineales
Cantidad de movimiento
La cantidad de movimiento, momento lineal, ímpetu o moméntum es una magnitud vectorial, que en mecánica clásica se define como el producto de la masa del cuerpo y su velocidad en un instante determinado. En cuanto al nombre, Galileo Galilei en su Discursos sobre dos nuevas ciencias usa el término italiano impeto, mientras que Isaac Newton usa en Principia Mathematica el término latino motus1 (movimiento) y vis (fuerza). Moméntum es una palabra directamente tomada del latín mōmentum, derivado del verbo mŏvēre 'mover'. El momento lineal se mide en el Sistema Internacional de Unidades en kg·m/s.
En mecánica clásica la forma más usual de introducir la cantidad de movimiento es mediante una definición como el producto de la masa (kg) de un cuerpo material por su velocidad (m/s), para luego analizar su relación con la ley de Newton a través del teorema del impulso y la variación de la cantidad de movimiento. No obstante, después del desarrollo de la Física Moderna, esta manera de hacerlo no resultó la más conveniente para abordar esta magnitud fundamental.
El defecto principal es que esta forma esconde el concepto inherente a la magnitud, que resulta ser una propiedad de cualquier ente físico con o sin masa, necesaria para
describir las interacciones. Los modelos actuales consideran que no sólo los cuerpos másicos poseen cantidad de movimiento, también resulta ser un atributo de los campos y los fotones.
La cantidad de movimiento obedece a una ley de conservación, lo cual significa que la cantidad de movimiento total de todo sistema cerrado (o sea uno que no es afectado por fuerzas exteriores, y cuyas fuerzas internas no son disipadoras) no puede ser cambiada y permanece constante en el tiempo.
En el enfoque geométrico de la mecánica relativista la definición es algo diferente. Además, el concepto de momento lineal puede definirse para entidades físicas como los fotones o los campos electromagnéticos, que carecen de masa en reposo. No se debe confundir el concepto de momento lineal con otro concepto básico de la mecánica newtoniana, denominado momento angular, que es una magnitud diferente.
Finalmente, se define el impulso recibido por una partícula o un cuerpo como la variación de la cantidad de movimiento durante un período de tiempo dado:
siendo la cantidad de movimiento al final del intervalo y al inicio del intervalo.
Mecánica newtoniana
Históricamente el concepto de cantidad de movimiento surgió en el contexto de la mecánica newtoniana en estrecha relación con el concepto de velocidad y el de masa. En mecánica newtoniana se define la cantidad de movimiento lineal como el producto de la masa por la velocidad:
La idea intuitiva tras esta definición está en que la "cantidad de movimiento" dependía tanto de la masa como de la velocidad: si se imagina una mosca y un camión, ambos moviéndose a 40 km/h, la experiencia cotidiana dice que la mosca es fácil de detener con la mano mientras que el camión no, aunque los dos vayan a la misma velocidad. Esta intuición llevó a definir una magnitud que fuera proporcional tanto a la masa del objeto móvil como a su velocidad.
Mecánica lagrangiana y hamiltoniana
En las formulaciones más abstractas de la mecánica clásica, como la mecánica lagrangiana y la mecánica hamiltoniana, además del momento lineal y del momento angular se pueden definir otros momentos, llamados momentos generalizados o momentos conjugados, asociados a cualquier tipo de coordenada generalizada. Se generaliza así la noción de momento.

Si se tiene un sistema mecánico definido por su lagrangiano L definido en términos de las coordenadas generalizadas (q1,q2,...,qN) y las velocidades generalizadas, entonces el momento conjugado de la coordenada qi viene dado por:2
Cuando la coordenada qi es una de las coordenadas de un sistema de coordenadas cartesianas, el momento conjugado coincide con una de las componentes del momento lineal, y, cuando la coordenada generalizada representa una coordenada angular o la medida de un ángulo, el momento conjugado correspondiente resulta ser una de las componentes del momento angular.
Cantidad de movimiento de un medio continuo
Si estamos interesados en averiguar la cantidad de movimiento de, por ejemplo, un fluido que se mueve según un campo de velocidades es necesario sumar la cantidad de movimiento de cada partícula del fluido, es decir, de cada diferencial de masa o elemento infinitesimal:
Movimiento de Inercia y Energía Rotacional
El momento de inercia (símbolo I) es una medida de la inercia rotacional de un cuerpo. Cuando un cuerpo gira en torno a uno de los ejes principales de inercia, la inercia rotacional puede ser representada como una magnitud escalar llamada momento de inercia. Sin embargo, en el caso más general posible la inercia rotacional debe representarse por medio de un conjunto de momentos de inercia y componentes que forman el llamado tensor de inercia. La descripción tensorial es necesaria para el análisis de sistemas complejos, como por ejemplo en movimientos giroscópicos.
El momento de inercia refleja la distribución de masa de un cuerpo o de un sistema de partículas en rotación, respecto a un eje de giro. El momento de inercia sólo depende de la geometría del cuerpo y de la posición del eje de giro; pero no depende de las fuerzas que intervienen en el movimiento.
El momento de inercia desempeña un papel análogo al de la masa inercial en el caso del movimiento rectilíneo y uniforme. Es el valor escalar del momento angular longitudinal de un sólido rígido.
Ecuaciones del momento de inercia
Dado un sistema de partículas y un eje arbitrario, el momento de inercia del mismo se define como la suma de los productos de las masas de las partículas por el cuadrado de la distancia r de cada partícula a dicho eje. Matemáticamente se expresa como:
Para un cuerpo de masa continua (Medio continuo), se generaliza como:
El subíndice V de la integral indica que se integra sobre todo el volumen del cuerpo. Se resuelve a través de una integral triple.
Este concepto desempeña en el movimiento de rotación un papel análogo al de masa inercial en el caso del movimiento rectilíneo y uniforme. La masa es la resistencia que presenta un cuerpo a ser acelerado en traslación y el Momento de Inercia es la resistencia que presenta un cuerpo a ser acelerado en rotación. Así, por ejemplo, la segunda ley de Newton: tiene como equivalente para la rotación:
donde:
es el momento aplicado al cuerpo. es el momento de inercia del cuerpo con respecto al eje de rotación y
es la aceleración angular.
Siempre y cuando la distancia con respecto al sistema de referencia permanezca constante.
La energía cinética de un cuerpo en movimiento con velocidad v es , mientras que
la energía cinética de un cuerpo en rotación con velocidad angular ω es , donde I es el momento de inercia con respecto al eje de rotación.
La conservación de la cantidad de movimiento o momento lineal tiene por equivalente la conservación del momento angular :
El vector momento angular, en general, no tiene la misma dirección que el vector velocidad angular . Ambos vectores tienen la misma dirección si el eje de giro es un eje principal de inercia. Cuando un eje es de simetría entonces es eje principal de inercia y entonces un giro alrededor de ese eje conduce a un momento angular dirigido también a lo largo de ese eje.
Teorema de Steiner o teorema de los ejes paralelos
Artículo principal: Teorema de Steiner
El teorema de Steiner (denominado en honor de Jakob Steiner) establece que el momento de inercia con respecto a cualquier eje paralelo a un eje que pasa por el centro

de masa, es igual al momento de inercia con respecto al eje que pasa por el centro de masa más el producto de la masa por el cuadrado de la distancia entre los dos ejes:
donde: Ieje es el momento de inercia respecto al eje que no pasa por el centro de masa; I(CM)
eje es el momento de inercia para un eje paralelo al anterior que pasa por el centro de masa; M (Masa Total) y h (Distancia entre los dos ejes paralelos considerados).
La demostración de este teorema resulta inmediata si se considera la descomposición de coordenadas relativa al centro de masas C inmediata:
donde el segundo término es nulo puesto que la distancia vectorial promedio de masa en torno al centro de masa es nula, por la propia definición de centro de masa.
El centro de gravedad y el centro de masa pueden no ser coincidentes, dado que el centro de masa sólo depende de la geometría del cuerpo, en cambio, el centro de gravedad depende del campo gravitacional en el que está inmerso dicho cuerpo.
Pasos para calcular el momento de inercia de áreas compuestas
1. Dividir el área compuesta en varias partes que sean simples2. Determinar las áreas de las partes, designarlas por .
3. Determinar las coordenadas del centro de masas de estas partes con
respecto a los ejes X e Y. Y calcular el cdm de toda la figura formada por todas las áreas parciales anteriores.
4. Calcular las distancias de los cdm de cada área respecto al cdm total de la figura.5. Calcular los momentos de inercia de las partes respecto a sus ejes de centro de
masas (que serán paralelos a x e y). Designar como: Ii,x e Ii,y, para el área i-ésima.6. Calcular el momento de inercia de cada parte respecto a los ejes x e y aplicando
el teorema del eje paralelo, es decir, el teorema de Steiner:
y 7. Calcular los momentos de inercia del área compuesta a partir de los momentos
anteriores: e
Momento Torsión y aceleración angular
Torsión:

Acción y efecto de torcer o torcerse una cosa en forma helicoidal.
[Mecánica] Modificación en la forma de un cuerpo cuando es sometido a distintas fuerzas.
[Mecánica] Deformación de un cuerpo producida al someterle a dos pares de fuerzas, las cuales actúan en direcciones opuestas y en planos paralelos, de forma que cada sección del cuerpo experimenta una rotación respecto a otra sección próxima.
En la teoría elemental de la torsión se admite que en un prisma mecánico sometido a torsión pura, las secciones rectas permanecen planas y la deformación se reduce para dos secciones indefinidamente próximas a una rotación de eje perpendicular a las mismas.
Torque (Momento de Torsión)Un deseo de rodar Suma de todos los torques = la inercia rotatoria x la aceleración angular torque = la fuerza aplicada x el brazo del momento (brazo de torsión)
Concepto general:
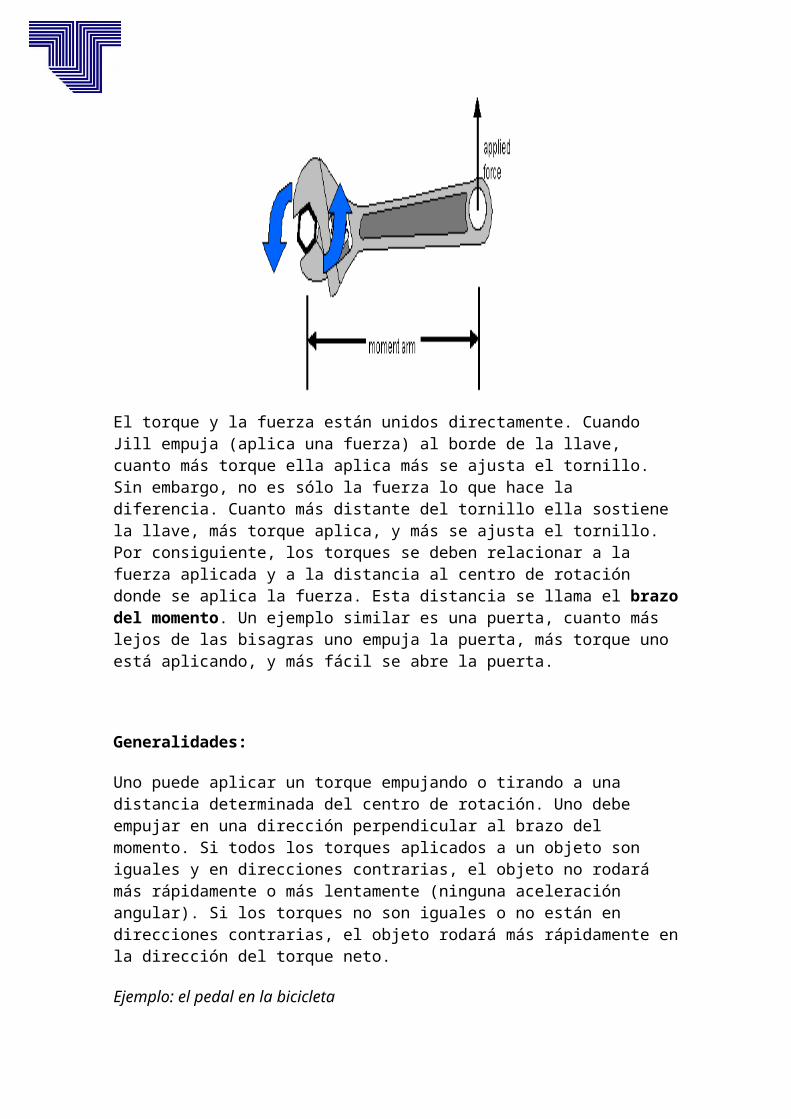
Los niños conocen mejor al torque como una rotación. Cuando Jill aprieta un tornillo con una llave, está aplicando un torque al tornillo. Como en el caso de la fuerza, si todos los torques son iguales, ella no podrá apretar el tornillo. Si el torque que ella aplica es mayor que el torque en contra debido a la fricción del tornillo, el tornillo rodará (se ajusta.
El torque y la fuerza están unidos directamente. Cuando Jill empuja (aplica una fuerza) al borde de la llave, cuanto más torque ella aplica más se ajusta el tornillo. Sin embargo, no es sólo la fuerza lo que hace la diferencia. Cuanto más distante del tornillo ella sostiene la llave, más torque aplica, y más se ajusta el tornillo. Por consiguiente, los torques se deben relacionar a la fuerza aplicada y a la distancia al centro de rotación donde se aplica la fuerza. Esta distancia se llama el brazo del momento. Un ejemplo
similar es una puerta, cuanto más lejos de las bisagras uno empuja la puerta, más torque uno está aplicando, y más fácil se abre la puerta.
Generalidades:
Uno puede aplicar un torque empujando o tirando a una distancia determinada del centro de rotación. Uno debe empujar en una dirección perpendicular al brazo del momento. Si todos los torques aplicados a un objeto son iguales y en direcciones contrarias, el objeto no rodará más rápidamente o más lentamente (ninguna aceleración angular). Si los torques no son iguales o no están en direcciones contrarias, el objeto rodará más rápidamente en la dirección del torque neto.
Ejemplo: el pedal en la bicicleta
Empujando el pedal de la bicicleta transmite un torque que hace rodar los neumáticos. Si uno aplica un torque que exactamente neutraliza todos los otros torques (torques friccional, etc.) no se va a acelerar o desacelerar la velocidad del neumático (pedal).
(la suma de los torques = 0, por consiguiente la aceleración angular = 0) si los torques friccional, etc. son mayores que el torque que uno aplica, se reducirá la velocidad del neumático (pedal). (los torques se suman < 0, por consiguiente la aceleración angular < 0) si el torque aplicado es mayor que el torque friccional, etc., el neumático (pedal) se va a acelerar. (los torques se suman > 0, por consiguiente la aceleración angular > 0)
Resortes de Torsión
Los resortes de torsión están diseñados para ofrecer resistencia a la torsión externa. La torsión se refiere a la acción torsional de las espiras. Si bien el alambre en sí está sujeto a esfuerzos de plegado en vez de esfuerzos torsionales, los resortes de torsión operan a su máximo cuando se apoyan sobre una vara o tubo. Este tipo de resorte se compone más comúnmente de alambre redondo, puede ser de enrollado cerrado o abierto y por lo general está diseñado para enroscarse. Los extremos pueden estar doblados, torcidos, enganchados o en argolla de acuerdo con la aplicación.
Un tipo especial de resorte de torsión es el resorte de torsión doble, que consiste en una sección de espiras derecha y otra izquierda, conectadas y trabajando en paralelo. Las aplicaciones típicas incluyen las ratoneras y tablillas de sujetapapeles, en las cuales la torsión se aplica desde dos direcciones.
Gama de tamaños de materiales
0,004" a 2,00"

Distribución de Esfuerzos en la Sección Transversal de una viga
La figura 5 muestra como se deforma un segmento de viga por la influencia de un momento flexionante. El segmento asume la forma " flexionada " característica al acortarse las fibras superiores y alargarse las fibras inferiores. El eje neutro que coincide con el centroide de la sección transversal de la viga, se flexiona pero no se deforma; por consiguiente el esfuerzo causado por flexion en el eje neutro es cero.
La distancia lineal de un punto localizado sobre la línea final vertical inicial al punto correspondiente sobre la línea final girada indica la cantidad de deformación producida en dicho punto de la sección transversal.
Se deduce que la deformación varia linealmente con la posición en la sección transversal, es decir la distancia al eje neutro. La distancia al eje neutro hacia la parte superior de la sección la deformación por compresión es mayor mientras que hacia la parte inferior la deformación por tensión es mayor.
Distribución del esfuerzo en una sección simétrica.
FIGURA 5

Distribución del esfuerzo en una sección no simétrica.
FIGURA 6
La forma general de la distribución del esfuerzo mostrado en la figura 5 podría ocurrir en cualquier sección de viga cuyo eje centroidal sea equidistante de las caras superior e inferior. En tales casos el esfuerzo de compresión máximo será igual al esfuerzo de compresión máximo.
Si el eje centroidal de la sección no esta a la misma distancia de las caras superior e inferior, la distribución del esfuerzo seria la mostrada en la figura 6.

Con las distancias Cb y Ct los esfuerzos serian:
Esfuerzo máximo de tensión en la cara inferior.
MCb
σ max =----------------
I
Esfuerzo máximo de compresión en la cara superior.
MCt
σ max =----------------
I
Movimiento Armónico Simple
El movimiento armónico simple (se abrevia m.a.s.), también denominado movimiento vibratorio armónico simple (abreviado m.v.a.s.), es un movimiento periódico que queda descrito en función del tiempo por una función armónica (seno o coseno). Si la descripción de un movimiento requiriese más de una función armónica, en general sería un movimiento armónico, pero no un m.a.s..
En el caso de que la trayectoria sea rectilínea, la partícula que realiza un m.a.s. oscila alejándose y acercándose de un punto, situado en el centro de su trayectoria, de tal manera que su posición en función del tiempo con respecto a ese punto es una sinusoide. En este movimiento, la fuerza que actúa sobre la partícula es proporcional a su desplazamiento respecto a dicho punto y dirigida hacia éste.
Cinemática del movi
miento armónico simple
Evolución en el tiempo del desplazamiento, la velocidad y la aceleración en un movimiento armónico simple.
El movimiento armónico simple es un movimiento periódico de vaivén, en el que un cuerpo oscila a un lado y a otro de su posición de equilibrio, en una dirección determinada, y en intervalos iguales de tiempo.
Por ejemplo, es el caso de un cuerpo colgado de un muelle oscilando arriba y abajo.El objeto oscila alrededor de la posición de equilibrio cuando se le separa de ella y se le deja en libertad. En este caso el cuerpo sube y baja.
Es también, el movimiento que realiza cada uno de los puntos de la cuerda de una guitarra cuando esta entra en vibración; pero, pongamos atención, no es el movimiento de la cuerda, sino el movimiento individual de cada uno de los puntos que podemos definir en la cuerda. El movimiento de la cuerda, un movimiento ondulatorio, es el resultado del movimiento global y simultáneo de todos los puntos de la cuerda.
Ecuación del movimiento
Elongación
En un movimiento armónico simple la magnitud de la fuerza ejercida sobre la partícula es directamente proporcional a su elongación, esto es la distancia a la que se encuentra ésta respecto a su posición de equilibrio. En un desplazamiento a lo largo del eje Ox, tomando el origen O en la posición de equilibrio, esta fuerza es tal que donde es una constante positiva y es la elongación. El signo negativo indica que en
todo momento la fuerza que actúa sobre la partícula está dirigida hacía la posición de equilibrio; esto es, en dirección contraria a su elongación (la "atrae" hacia la posición de equilibrio).
Aplicando la segunda ley de Newton, el movimiento armónico simple se define entonces en una dimensión mediante la ecuación diferencial
Siendo la masa del cuerpo en desplazamiento. Escribiendo se obtiene la siguiente ecuación donde ω es la frecuencia angular del movimiento:
La solución de la ecuación diferencial (2) puede escribirse en la forma
donde:
es la elongación de la partícula.es la amplitud del movimiento (elongación máxima).es la frecuencia angular
es el tiempo.es la fase inicial e indica el estado de oscilación o vibración (o fase) en el
instante t = 0 de la partícula que oscila.
Además, la frecuencia de oscilación puede escribirse como esto:
, y por lo tanto el periodo como
La velocidad y aceleración de la partícula pueden obtenerse derivando respecto del
tiempo la expresión .
Velocidad
La velocidad es la variación del espacio respecto al tiempo y se obtiene por lo tanto derivando la ecuación del espacio respecto al tiempo:
Aceleración
La aceleración es la variación de la velocidad del movimiento respecto al tiempo y se obtiene por lo tanto derivando la ecuación de la velocidad respecto al tiempo:
Amplitud y fase inicial
La amplitud A y la fase inicial se pueden calcular a partir de las condiciones iniciales del movimento, esto es de los valores de la elongación x0 y de la velocidad v0 iniciales.
Sumando miembro a miembro las dos ecuaciones y obtenemos
Dividiendo miembro a miembro las dos ecuaciones y obtenemos
Conclusión
Al terminar este importante trabajo conocimos puntos muy interesantes, como que el resorte es uno de los elementos de mayor uso en las maquinas cuando se le aplican fuerzas se deforma alargándose o acortándose en una magnitud llamada deformación, es un instrumento de uso diario en el mundo industrial, en cuanto a la ley de masas entendemos que los tiempos de oscilación de varios péndulos de igual longitud son independientes de sus masas y de su naturaleza,El objetivo principal de la hidrostática se basa en estudiar los líquidos en reposo y a los gases, podemos observar que este término se aplica a líquidos y gases porque ambos tienen propiedades similares. En mecánica clásica la manera más usual de introducir la cantidad de movimiento es la relación entre cantidades angulares y lineales, también desarrollamos el cambio que experimenta la velocidad angular por unidad de tiempo la conocemos como relación entre cantidades angulares y lineales.
Estos son unos de los puntos empleados y desarrollados en el trabajo que de una u otra manera lo podemos aplicar todos los días con las relaciones de trabajo. La física es una de las ciencias más importante para saber él porque pasan muchas cosas en nuestras vidas cotidianas.