estimaciÓn de estado y parÁmetros de lÍneas de … · contenidos, aplicaciones y ejemplos; ......
TRANSCRIPT
ESTIMACIÓN DE ESTADO Y PARÁMETROS DE LÍNEAS
DE TRANSMISIÓN
M. R. M. CastilloJ.B.A. London Jr.
N.G. Bretas

ESTIMACIÓN DE ESTADO
Y PARÁMETROS DE LÍNEAS
DE TRANSMISIÓN
Primera edición digital
Julio, 2011
Lima - Perú
© M. R. M. Castillo
J.B.A. London Jr.
N.G. Bretas
PROYECTO LIBRO DIGITAL
PLD 0143
Editor: Víctor López Guzmán
http://www.guzlop-editoras.com/[email protected] [email protected] facebook.com/guzlop twitter.com/guzlopster428 4071 - 999 921 348Lima - Perú
PROYECTO LIBRO DIGITAL (PLD)
El proyecto libro digital propone que los apuntes de clases, las tesis y los avances en investigación (papers) de las profesoras y profesores de las universidades peruanas sean convertidos en libro digital y difundidos por internet en forma gratuita a través de nuestra página web. Los recursos económicos disponibles para este proyecto provienen de las utilidades nuestras por los trabajos de edición y publicación a terceros, por lo tanto, son limitados.
Un libro digital, también conocido como e-book, eBook, ecolibro o libro electrónico, es una versión electrónica de la digitalización y diagramación de un libro que originariamente es editado para ser impreso en papel y que puede encontrarse en internet o en CD-ROM. Por, lo tanto, no reemplaza al libro impreso.
Entre las ventajas del libro digital se tienen:• su accesibilidad (se puede leer en cualquier parte que tenga electricidad),• su difusión globalizada (mediante internet nos da una gran independencia geográfica),• su incorporación a la carrera tecnológica y la posibilidad de disminuir la brecha digital (inseparable de la competición por la influencia cultural),• su aprovechamiento a los cambios de hábitos de los estudiantes asociados al internet y a las redes sociales (siendo la oportunidad de difundir, de una forma diferente, el conocimiento),• su realización permitirá disminuir o anular la percepción de nuestras élites políticas frente a la supuesta incompetencia de nuestras profesoras y profesores de producir libros, ponencias y trabajos de investiga-ción de alta calidad en los contenidos, y, que su existencia no está circunscrita solo a las letras.
Algunos objetivos que esperamos alcanzar:• Que el estudiante, como usuario final, tenga el curso que está llevando desarrollado como un libro (con todas las características de un libro impreso) en formato digital.• Que las profesoras y profesores actualicen la información dada a los estudiantes, mejorando sus contenidos, aplicaciones y ejemplos; pudiendo evaluar sus aportes y coherencia en los cursos que dicta.• Que las profesoras y profesores, y estudiantes logren una familiaridad con el uso de estas nuevas tecnologías.• El libro digital bien elaborado, permitirá dar un buen nivel de conocimientos a las alumnas y alumnos de las universidades nacionales y, especialmente, a los del interior del país donde la calidad de la educación actualmente es muy deficiente tanto por la infraestructura física como por el personal docente.• El pe r sona l docente jugará un r o l de tu to r, f ac i l i t ador y conductor de p r oyec tos
de investigación de las alumnas y alumnos tomando como base el libro digital y las direcciones electró-nicas recomendadas.• Que este proyecto ayude a las universidades nacionales en las acreditaciones internacionales y mejorar la sustentación de sus presupuestos anuales en el Congreso.
En el aspecto legal:• Las autoras o autores ceden sus derechos para esta edición digital, sin perder su autoría, permitiendo que su obra sea puesta en internet como descarga gratuita.• Las autoras o autores pueden hacer nuevas ediciones basadas o no en esta versión digital.
Lima - Perú, enero del 2011
“El conocimiento es útil solo si se difunde y aplica” Víctor López Guzmán Editor
Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
190
1. Introducción
En razón del aumento de la demanda deenergía eléctrica y de la expansión de lossistemas eléctricos de potencia (SEP), la soluciónpara mantener el suministro de energía eléctrica,obedeciendo a la trilogía de continuidad, calidady economía de servicio, hace surgir, cada vez mas,la necesidad de interconexión de los SEP, asícomo de la producción de energía por productoresindependientes. Con esto, ha aumentado lanecesidad de desarrollar e implementar softwaredestinados a Estimación de Estado en SistemasEléctricos de Potencia (EESEP).
En función de esto, en los últimos años lascompañías de energía eléctrica vienen invirtiendotiempo y dinero en la adquisición e implementaciónde software que poseen las siguientesfuncionalidades: Análisis de observabilidad;Estimación de estado; Procesamiento de ErroresGroseros (EG). Inicialmente, se creía que laobtención de software con las funcionalidadesindicadas garantirían el suceso del proceso deEESEP. Sin embargo, en la hora de colocar esossoftware para funcionar, las compañías de energía
eléctrica se enfrentan con diversos problemas, quein viabilizan la aplicación de los mismos. Analizandolos informes presentados por algunas compañías,se verifica que tres de las principales razones,para aquellos problemas, son las siguientes:
(i) Existencia de los llamados Errores deParámetros (EPs), esto es, informacioneserradas proporcionadas en relación a losparámetros1 del SEP. Los parámetros de unSEP pueden estar incorrectos fruto de: datosimprecisos proporcionados por losfabricantes; estimativas groseras de ladistancia de lineas de transmisión;alteraciones de proyecto no actualizadas enla base de datos; variación de parámetrosdebido al envejecimiento de componentes delsistema, etc.
(ii) Plano de medición inadecuado: esto es, elnúmero, tipo y localización de los medidoresinstalados en el sistema es tal que posibilitael aparecimiento de medidas críticas (medidacrítica es aquella que, cuando se pierde, haceun SEP observable volverse no observable yde conjuntos críticos de medidas.
Estimación de estado y parámetros de líneas de transmisión
M. R. M. Castillo J.B.A. London Jr. N.G. BretasLaboratorio de Análisis Computacional en Sistemas Eléctricos de Potencia (LACO)–Depto. de Ingeniería
EléctricaEscuela de Ingeniería de San Carlos - Universidad de San PauloSan Carlos - SP
Resumen.- Para operar un sistema de energía eléctrica de forma económica ysegura, se debe disponer de datos confiables que permitan efectuar acciones decontrol cuando se han necesarias. La función Estimación de Estado en Centros deOperación, se encarga del procesamiento sistemático de datos recibidos en tiemporeal para la obtención de la estimativa más probable del estado de operación delsistema.El objetivo principal de este trabajo es el desarrollo de una metodología paraestimación de estado y parámetros de líneas de transmisión; en esta metodología,el vector de estado convencional es aumentado para la inclusión de los parámetrosa ser estimados. Este vector de estado «aumentado» es entonces estimado a travésde una grande cantidad de medidas, obtenidas en diversas muestras, durante unintervalo de tiempo en que las variables de estado del sistema no hayan sufridoalteraciones significativas de valor. Esta situación ocurre típicamente por la noche,fuera de los horarios de pico. Se propone también una metodología para análisisde observabilidad para el estimador propuesto. Para comprobar la eficiencia delas metodologías propuestas, varias pruebas fueron realizadas, utilizando sistemasficticios de 3 y 5 barras, y el sistema de 14 barras del IEEE.
Palabras-claves.- Estimación de Estado y Parámetros; Observabilidad de Redes;Operación en Tiempo-Real; Redundancia de Medidas; Sistemas Eléctricos dePotencia.
1 Impedancia de lineas de transmisión, posición de taps de transformadores, etc.
Memorias - XVII CONIMERA
191
Esto ocurre en razón de la medida críticapresentar residuo nulo y las medidas de unconjunto crítico poseer residuosnormalizados idénticos, no siendo posible,así, detectar EG en medida crítica, niidentificar EG cuando este ocurre en una delas medidas de un conjunto crítico. Valedestacar que en algunas situaciones, el planode medición disponible es tal que noposibilita ni la observabilidad del sistema;
(iii) Mala calidad de las informaciones utilizadascomo pseudo-medidas2 para restauración dela observabilidad del sistema.Frente a lo expuesto, se propone estetrabajo, cuyo objetivo es desarrollar unestimador de estado y parámetros de lineasde transmisión, creemos que tal estimadorposibilitará la validación de los parámetrosde lineas de transmisión que estándisponibles en el banco de datos de unadeterminada compañía de energía eléctrica.
2. Errores de parámetros
En (Ref.1) fue presentada una revisión detécnicas sobre estimación de parámetros, asícomo sus posibilidades y limitaciones. Lossiguientes comentarios reflejan algunasconclusiones de ese trabajo: - Cualquier método,independientemente de la técnica adoptada,requiere cierta redundancia local de las medidas;- utilizar medidas de diversas muestras, paraestimar estado e parámetros de forma secuencial,o instantáneamente, posibilita la obtención deestado y parámetros mas confiables; - métodosque aumentan el vector de estado tienedesempeño claramente mejor que aquellosbasados en análisis de sensibilidad del residuo.
Dependiendo del modo que el vectoraumentado está siendo estimado, se puededistinguir dos grupos de métodos: (i) aquellosbasados en ecuaciones normales WLS (Ref. 2),(Ref. 3); y (ii) aquellos que hacen uso del filtro deKalman (Ref. 4), (Ref. 5). Los métodos del primergrupo sufren con problemas de observabilidad, yaque raramente las medidas disponibles sonsuficientes para estimar el vector de estadoaumentado. Para contornear tales limitaciones,los métodos del segundo grupo aumentan el vectorde medidas considerando como pseudo-medidas
el vector de estado estimado en el instante anterior.Sin embargo, el problema de eses métodos estáen la definición de la matriz de transición deestado.
Aprovechando el hecho de que ciertasmedidas no sufren mudanzas significativas devalor, durante un determinado intervalo de tiempo3,en este articulo se propone, inicialmente, unestimador de estado y parámetros, basado en lasecuaciones normales, el cual aumenta ambos elvector de estado y de medidas. El aumento delvector de estado será realizado para la inclusiónde los parámetros a ser estimados; ya el vectorde medidas será aumentado para considerarmedidas de diversas muestras, desde que nohayan sufrido una alteración significativa de susvalores. Así, una posibilidad de problemas deobservabilidad disminuí, una vez que el aumentodel vector de estado será acompañado por elaumento del vector de medidas. Observe que, enrazón de las medidas no cambiansignificativamente de valor, en el período de tiempoconsiderado, podemos considerar que lasrespectivas variables de estado son casiconstantes, en ese intervalo de tiempo.
El método de observabilidad desarrollado en(Ref. 6) es expandido al problema de estimaciónde estado aumentado.
Los parámetros a ser estimados en estametodología son las conductancias y suceptanciasserie de lineas de transmisión media y larga, osea, con distancia por encima de 80 km (50millas). Se decidió estimar apenas esosparámetros, por ser los principales responsablespor las perdidas en un SEP (Ref. 7)
2.1 Descripción del Método propuestopara Estimación de Estado yParámetros
La metodología propuesta comprende tresfases:
Fase 1: Determinación del conjunto demedidas, a ser utilizado en el proceso deestimación de estado y parámetros, es decir,determinación de las medidas que no hayan sufridouna alteración significativa de sus valores, duranteun cierto período de tiempo;
2 Son datos de previsión de carga, previsión de generación, datos históricos, etc. que hacen parte del banco de datos.3 Eso ocurre típicamente por la noche, fuera de los horarios de pico.
Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
192
Fase 2: Análisis de observabilidad para elestimador de estado y parámetros propuesto;
Fase 3: Estimación de estado y parámetrospropiamente dicha.
A continuación presentamos cada una deesas fases.
2.1.1 Fase 1
Para determinar las medidas a ser utilizadas,el primer paso es determinar las variables deestado no sujetas a una variación significativa,durante un determinado intervalo de tiempo. Depose de esas variables de estado, las medidasde las diversas muestras, obtenidas en aquelintervalo de tiempo, incidentes apenas a las barrascuyas variables de estado no estén variandosignificativamente, son seleccionadas para serutil izadas en la estimación de estado yparámetros.
Consideramos que una variable de estado noestá sujeta a una variación significativa, duranteun determinado intervalo de tiempo, si la diferenciaentre el valor mas alto y el valor mas bajo, que lamisma asumió en aquel período de tiempo, fueraigual o menor que 1% (el índice utilizado paraanálisis de la convergencia del estimador deestado).
Observación 1: Antes de presentar el métodopropuesto para análisis de observabilidad (Fase2),se presenta la formulación del estimador de estadoy parámetros propuesto (Fase 3).
2.1.2 Fase 3
El estimador propuesto aumenta los vectoresde estado y medidas. El vector de estado, aquidenominado como vector de estado aumentado(xAum), incorpora los parámetros a ser estimados.Asumiendo que el conjunto de medidas no hayansufrido alteración significativa de sus valores, elvector de medidas, aquí llamado de vector demedidas aumentado (ZAum), es incrementado conla inclusión de medidas obtenidas en diversasmuestras, dentro de período de tiempoconsiderado.
Considerando el modelo aumentadopropuesto, la ecuacion no-linear que relaciona elvector de medidas aumentado «ZAum» (m x 1) y elvector de estado aumentado «xAum « (nAum x 1) es(Ref. 8):
AumAumAumAum wxhz += )( , (1)
Donde, «wAum»es el vector de ruido en lasmedidas (m x 1) (se considera que eses ruidospresentan distribución Gausiana con media cero);«h(.)» es un vector de funciones no-lineares querelacionan las medidas con las variables de estadoaumentada.
A través de la teoría de Mínimos CuadradosPonderados (WLS), El vector de estadoaumentado xAum es estimado a partir da solucióniterativa del siguiente sistema de ecuaciones(ecuación normal):
( )[ ]Aum
xhAum
zAum
WtAum
HAum
xAum
G −⋅⋅ ⋅=∆
(2)
Donde,
Aum
AumAum x
xhH
∂∂= )(
es la matriz Jacobiana
aumentada;
AumHWt
AumH
AumAumG ⋅⋅= es la matriz ganancia
aumentada;
AumW es la matriz inversa dela covariancia de loserrores de medidas(matriz diagonal m x m).
Los parámetros a ser estimados son lasconductancias (Gkm) y las suceptancias (Bkm) seriede lineas de transmisión medias y largas, es decir,aquellas que presentan la suceptancia shunt nonula (modelo ð equivalente). Consecuentemente,para un sistema con «L» ramos e «nb» barras,
tenemos « LnbnAum ⋅+−⋅= 212 » variables deestado «aumentado» a ser estimadas (siendo«nb» magnitudes de tensión; «nb-1» ángulos detensión y «2L» parámetros). Debido al malcondicionamiento de la matriz GAum, un métodode escalonamiento de lineas y columnas fueimplementado para resolver la ecuación (2).
2.1.3 Fase 2
El método para análisis de observabilidadpropuesto esta basado en la factorización de lamatriz ganancia aumentada y conceptoscontenidos en los caminos de factorización. Enrealidad, el método aquí propuesto es unaextensión del método desarrollado por (Ref. 6),que se basa en la Matriz Ganancia del modelono aumentado.

Memorias - XVII CONIMERA
193
Considerando la formulación presentada enla sección anterior, la matriz Jacobiana Aumentadatiene la siguiente estructura:
=
=
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
θ
θ
θ
θ
θ
θ
VvV
pV
QvQ
pQ
PvP
pP
VVvVp
QQvQp
PPvPp
Aum
HHH
HHH
HHH
H
(3)
Donde,«P», «Q» y «V» indican los vectores de medidasde potencia activa y reactiva, y de magnitud detensión, respectivamente;«θ», «v» y «p» indican los vectores de ángulo detensión, magnitud de tensión y parámetros a serestimados, respectivamente.
La correspondiente matriz gananciaaumentada se transforma:
==
θθθ
θ
θ
GGG
GGG
GGG
HWHG
vp
vvvp
ppvp
Aumt
AumAum Aum ]][[][
(4)
Esta matriz GAum será usada en el procesode estimación de estado y parámetros (fase 3),pero no será util izada para análisis deobservabilidad (fase 2). Esto porque, para utilizarlos caminos de grafo, en la determinación de lasislas observables, es necesario que las ecuacionesen análisis relacionen por lo menos dos de lasvariables a ser estimadas (Ref. 9).
Frente a lo expuesto, el método propuestopara análisis de observabilidad no considera, ensu análisis, las medidas de magnitud de tensión,ni las variables de estado de magnitud de tensión,en las barras que poseen medidas de tensión.
Basado en la teoría presentada en (Ref. 6)[la sección 3 de (Ref. 8)] presentó una revisiónsobre esa teoría], se puede afirmar que si unsistema es observable, la factorización triangularde GAum, cuando un ángulo de fase no es tomadocomo referencia, resulta en solamente un caminode grafo y reduce la matriz GAum a siguiente forma(la cual presenta apenas un pívot nulo):
(5)
Donde «nbv» es el número de barras conmedidas de magnitud de tensión.
Si el sistema no es observable como un todo,la factorización de GAum resulta en mas de un pívotnulo (PN), que significa la existencia de mas deun camino de grafo (Ref. 6). En esta situación esnecesario identificar las islas observables.
Basado en la teoría presentada en (Ref. 6),así como en las ideas citadas, el siguiente algoritmoes propuesto para análisis de observabilidad:
Paso 1: A través del conjunto de medidasseleccionado, en la fase 1, forme la matriz GAum yejecute la factorización triangular de esa matriz.Se aparece apenas un PN, el sistema esobservable como un todo; PARE. Caso contrario,vaya para el próximo paso;
Paso 2: Identifique los caminos de grafoasociados con la matriz factorizada AumU . Si noexiste medidas de potencia, relacionando nodosde diferentes caminos de grafo, entonces cadasub-rede, asociada a cada camino de grafoaislado, constituye una isla observable de la rede;PARE. Caso contrário, vaya para el próximo paso.
Paso 3: Elimine las medidas de potencia,relacionando nodos de caminos de grafo diferentes(esas medidas son irrelevantes, considerando laestimación de estado y parámetros para las islasobservables). Actualize la factorización de GAum yretorne al paso 2.
Una vez que las islas observables hayan sidodeterminadas, la estimación de estado yparámetros será realizada separadamente, paracada una de estas islas.
2.2 Ejemplos
En los ejemplos 2.2.1, 2.2.2 y 2.2.3, queserán presentados a continuación consideramos:errores de 3,33% en todos los parámetros a serestimados (valores correctos para todos losparámetros que no serán estimados); valoresexactos para todas las medidas utilizadas en elproceso de estimación de estado y parámetros(Fase 3), es decir, sin adición de ruido algún a losvalores exactos obtenidos a través del programade flujo de carga ANAREDE.
2.2.1 Ejemplo 1
El método propuesto para estimación deestado y parámetros es aplicado al sistema de 3
Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
194
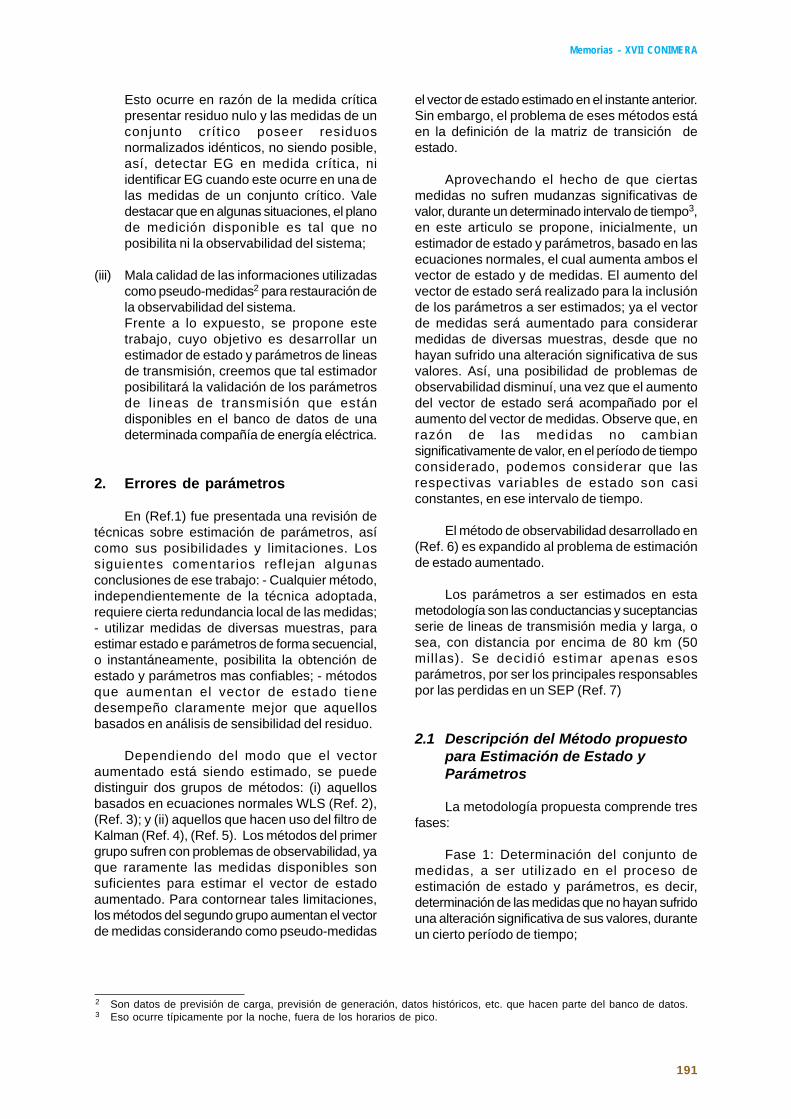
barras, mostrado en la Fig. 1, considerando losparámetros presentados en la segunda columnade la Tabla 1(condiciones iniciales)4.
Observación 2: En las figuras 1 y 2 de esteartículo serán usados los siguientes símbolos:
Los resultados obtenidos en esta fase sonpresentados en la tercera columna de la Tabla 1.
Par de medidas de flujo Medidas de tensión Generador Condensador síncrono
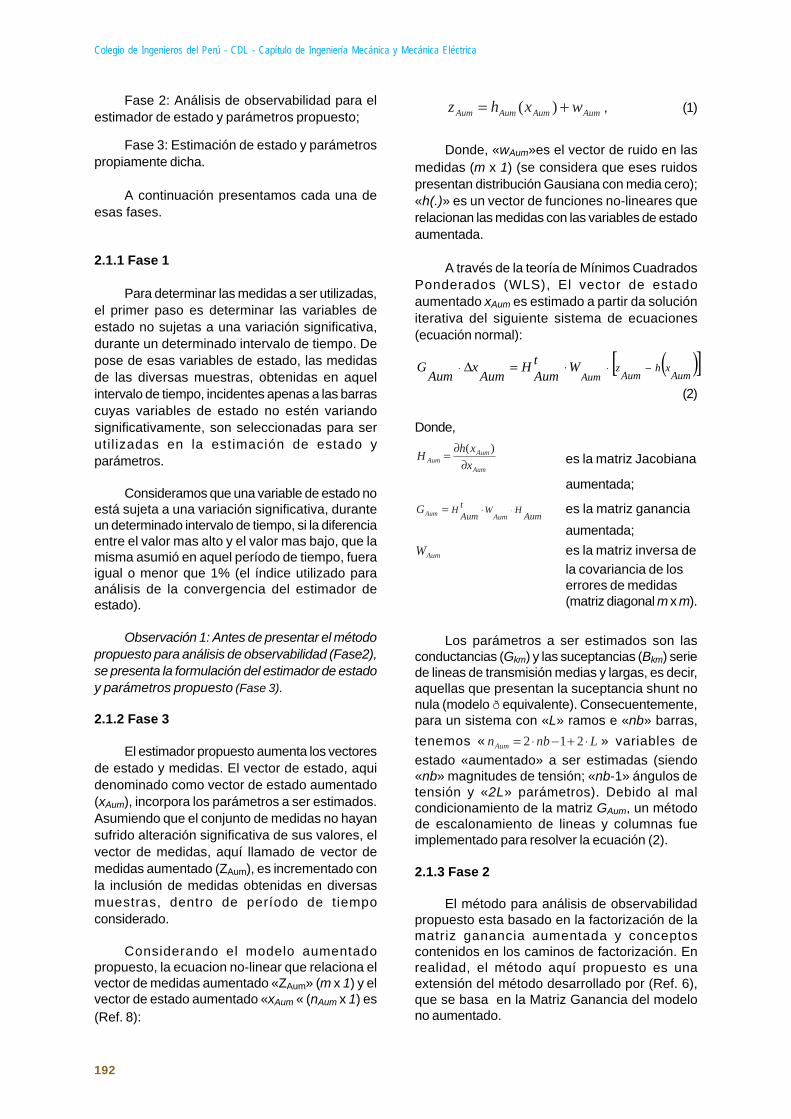
Fase 1: Como mencionado anteriormente,vamos a considerar que el conjunto de medidasindicado en la Fig. 1 fue previamente selecciona-do para ser utilizado.
Figura 1 – Sistema de 3 barras
Fase 2: Análisis de observabilidad:
Paso 1: Con las medidas disponibles, lamatriz GAug es obtenida y su forma factorada es:
Como apareció apenas un PN, el elementoUAug(θ3,θ3)=0, el sistema es observable como untodo.
Fase 3: Estimación de estado y parámetros:Considerando las medidas indicadas en la Fig.1y usando solamente valores correctos para esasmedidas, obtenidos a través del softwareANAREDE, el vector de estado aumentado esestimado.
Los valores de las medidas son lossiguientes:
Tabla 1 – Resultados del ejemplo 1
Observación 3: En razón del estimadorpropuesto no estimar la susceptancia shunt delineas de transmisión, en las pruebas realizadaslos valores de esos parámetros fueron fijados enlos valores correctos.
2.2.2 Ejemplo 2
Fase 1: Nuevamente será analizado elsistema de 3 barras mostrado en la Fig.1. Sinembargo, consideremos, ahora, que las medidasseleccionadas son: P12, Q12, P23, Q23, P32, Q32,V1, V2 e V3 (sin las medidas P21, Q21).
Fase 2: Análisis de Observabilidad:
Paso 1:
Paso 2: Existe dos caminos de grafo5:(1)={G12,B12,θ1} e (2)={G23,B23,θ2,θ3}
Como las medidas de potencia P12 y Q12
relacionan nodos de diferentes caminos de grafo,vaya para el Paso 3.
Paso 3: P12 y Q12 son removidas. La nuevaGAug es obtenida y factorizada:
4 Los valores de las tensiones complejas en las barras del sistema utilizados como condición inicial, en este y en lospróximos ejemplos, son obtenidas por un estimador de estado convencional, por mínimos cuadrados ponderados, que esprocesado considerando los parámetros y las medidas disponibles. Vale resaltar que la condición inicial para esteestimador WLS es la usual (θi = 0 e vi = 1, para i = 1,...,nb).
5 Las fechas presentadas en la correspondiente matriz UAug muestran los caminos de grafo asociados a esa matriz.
Memorias - XVII CONIMERA
195
Paso 2: Existen cuatro caminos de grafo6:(1)={G12}; (2)={G23,B23,θ2,θ3}, (3)={B12}e (4)={θ1}.Como no existe mas medidas de potenciarelacionando nodos de diferentes caminos degrafo, el sistema como un todo es no observabley cada subred asociada con cada camino de grafoaislado constituye una isla observable de la red
Observación 4: La estimación de estado yparámetros no es procesada para isla observableformada por apenas una variable de estadoaumentada.
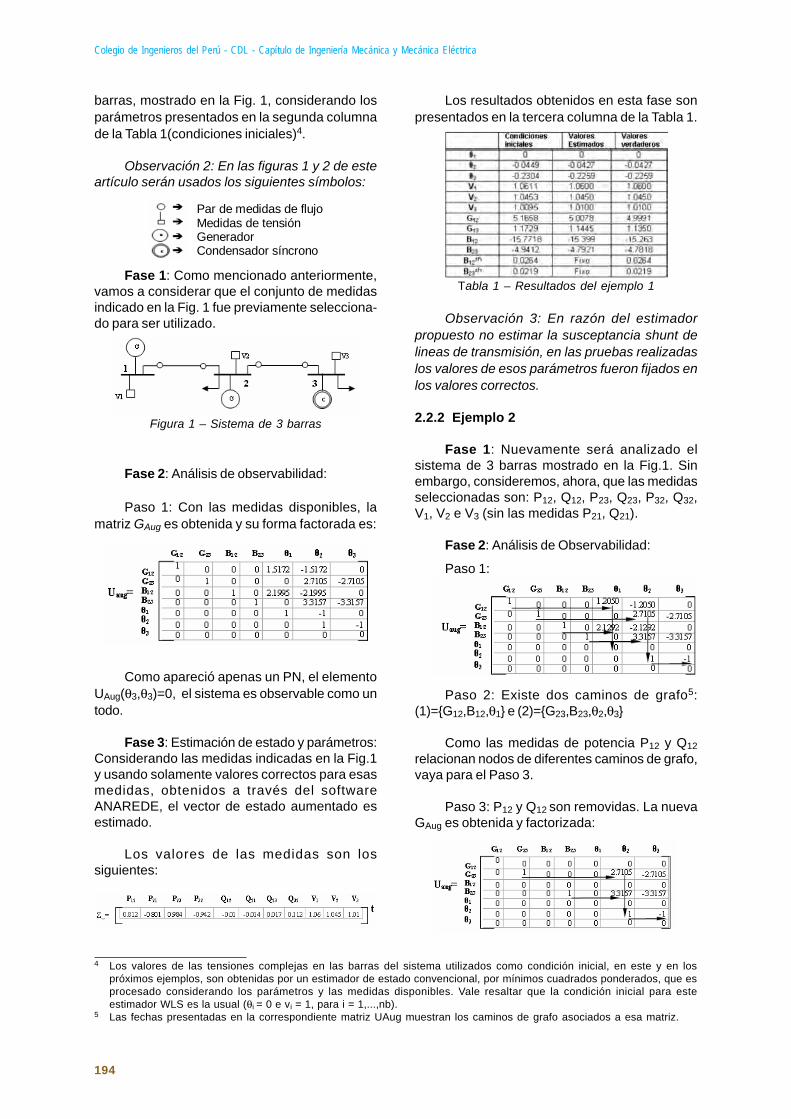
Fase 3: Estimación de estado y parámetros:Considerando solamente las medidas P23, P32,Q23, Q32, V2 y V3
7, el estimador de estado yparámetros es procesado para la isla formada porlas barras 2 y 3. Los resultados obtenidos en estafase son presentados en la tercera columna de laTabla 2.
Tabla 2 – Resultados del ejemplo 2
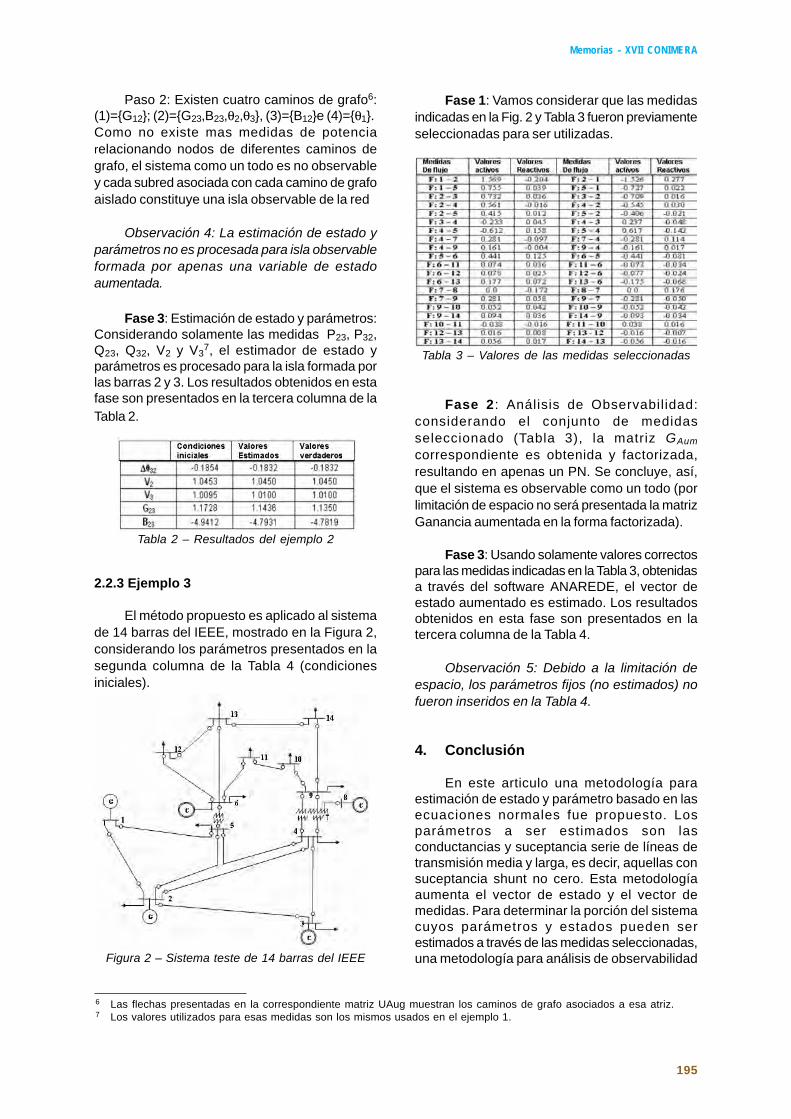
2.2.3 Ejemplo 3
El método propuesto es aplicado al sistemade 14 barras del IEEE, mostrado en la Figura 2,considerando los parámetros presentados en lasegunda columna de la Tabla 4 (condicionesiniciales).
Figura 2 – Sistema teste de 14 barras del IEEE
6 Las flechas presentadas en la correspondiente matriz UAug muestran los caminos de grafo asociados a esa atriz.7 Los valores utilizados para esas medidas son los mismos usados en el ejemplo 1.
Fase 1: Vamos considerar que las medidasindicadas en la Fig. 2 y Tabla 3 fueron previamenteseleccionadas para ser utilizadas.
Tabla 3 – Valores de las medidas seleccionadas
Fase 2 : Análisis de Observabilidad:considerando el conjunto de medidasseleccionado (Tabla 3), la matriz GAum
correspondiente es obtenida y factorizada,resultando en apenas un PN. Se concluye, así,que el sistema es observable como un todo (porlimitación de espacio no será presentada la matrizGanancia aumentada en la forma factorizada).
Fase 3: Usando solamente valores correctospara las medidas indicadas en la Tabla 3, obtenidasa través del software ANAREDE, el vector deestado aumentado es estimado. Los resultadosobtenidos en esta fase son presentados en latercera columna de la Tabla 4.
Observación 5: Debido a la limitación deespacio, los parámetros fijos (no estimados) nofueron inseridos en la Tabla 4.
4. Conclusión
En este articulo una metodología paraestimación de estado y parámetro basado en lasecuaciones normales fue propuesto. Losparámetros a ser estimados son lasconductancias y suceptancia serie de líneas detransmisión media y larga, es decir, aquellas consuceptancia shunt no cero. Esta metodologíaaumenta el vector de estado y el vector demedidas. Para determinar la porción del sistemacuyos parámetros y estados pueden serestimados a través de las medidas seleccionadas,una metodología para análisis de observabilidad
Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
196
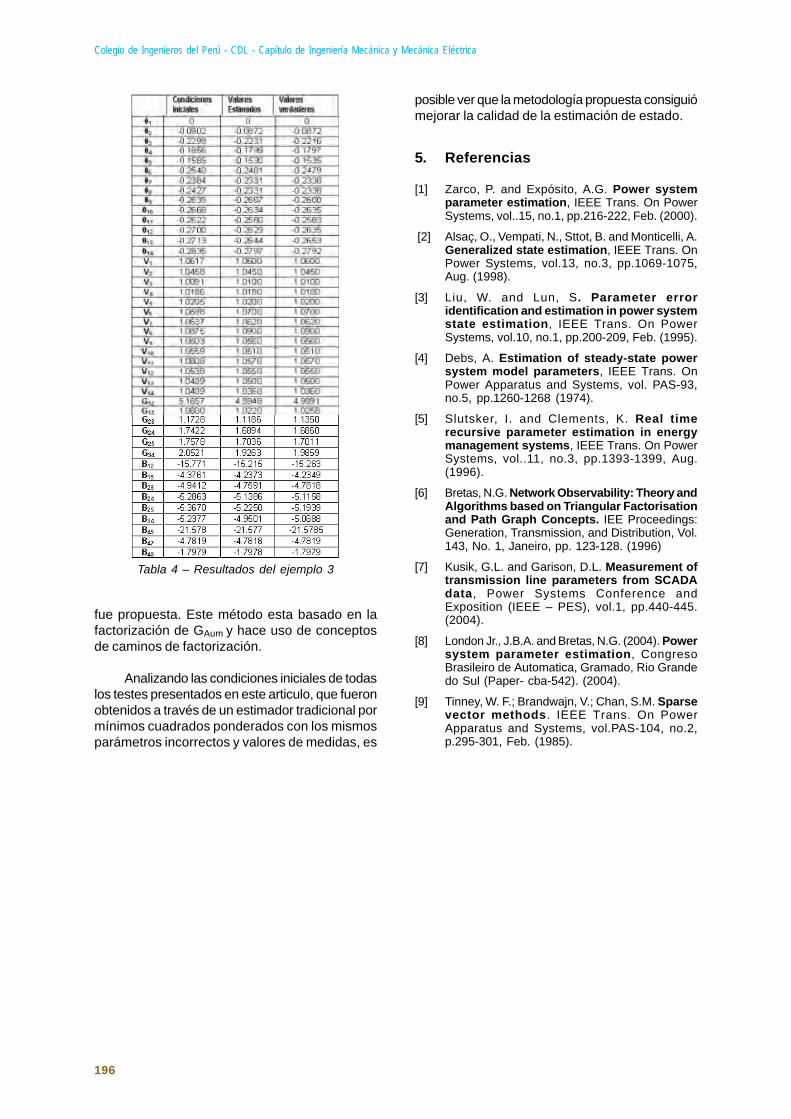
Tabla 4 – Resultados del ejemplo 3
fue propuesta. Este método esta basado en lafactorización de GAum y hace uso de conceptosde caminos de factorización.
Analizando las condiciones iniciales de todaslos testes presentados en este articulo, que fueronobtenidos a través de un estimador tradicional pormínimos cuadrados ponderados con los mismosparámetros incorrectos y valores de medidas, es
posible ver que la metodología propuesta consiguiómejorar la calidad de la estimación de estado.
5. Referencias
[1] Zarco, P. and Expósito, A.G. Power systemparameter estimation, IEEE Trans. On PowerSystems, vol..15, no.1, pp.216-222, Feb. (2000).
[2] Alsaç, O., Vempati, N., Sttot, B. and Monticelli, A.Generalized state estimation, IEEE Trans. OnPower Systems, vol.13, no.3, pp.1069-1075,Aug. (1998).
[3] Liu, W. and Lun, S. Parameter erroridentification and estimation in power systemstate estimation, IEEE Trans. On PowerSystems, vol.10, no.1, pp.200-209, Feb. (1995).
[4] Debs, A. Estimation of steady-state powersystem model parameters, IEEE Trans. OnPower Apparatus and Systems, vol. PAS-93,no.5, pp.1260-1268 (1974).
[5] Slutsker, I. and Clements, K. Real timerecursive parameter estimation in energymanagement systems, IEEE Trans. On PowerSystems, vol..11, no.3, pp.1393-1399, Aug.(1996).
[6] Bretas, N.G. Network Observability: Theory andAlgorithms based on Triangular Factorisationand Path Graph Concepts. IEE Proceedings:Generation, Transmission, and Distribution, Vol.143, No. 1, Janeiro, pp. 123-128. (1996)
[7] Kusik, G.L. and Garison, D.L. Measurement oftransmission line parameters from SCADAdata, Power Systems Conference andExposition (IEEE – PES), vol.1, pp.440-445.(2004).
[8] London Jr., J.B.A. and Bretas, N.G. (2004). Powersystem parameter estimation, CongresoBrasileiro de Automatica, Gramado, Rio Grandedo Sul (Paper- cba-542). (2004).
[9] Tinney, W. F.; Brandwajn, V.; Chan, S.M. Sparsevector methods. IEEE Trans. On PowerApparatus and Systems, vol.PAS-104, no.2,p.295-301, Feb. (1985).
