escuela politÉctica del ejÉrcito -...
TRANSCRIPT
ESCUELA POLITÉCTICA DEL EJÉRCITO
DEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICA
PROYECTO PREVIO A LA OBTENCIÓN DEL TÍTULO DE
INGENIERO EN ELECTRÓNICA Y TELECOMUNICACIONES
―IMPLEMENTACIÓN DE LA ETAPA DE RECEPCIÓN DE UN
SISTEMA DE COMUNICACIONES UTILIZANDO LA
TECNOLOGÍA FPGA‖
GABRIEL DARÍO FIERRO PIÑEIROS
DIRECTOR: ING. JULIO LARCO
CODIRECTOR: ING. BYRON NAVAS
SANGOLQUÍ - ECUADOR
2010

I
II
RESUMEN
Tanto la modulación BPSK como la modulación QPSK son hoy en día muy
utilizadas en diferentes tecnologías de telecomunicaciones debido a su bajo costo
de implementación y su simplicidad.
Debido a la fluctuación del nivel de potencia de una señal en un entorno móvil,
es difícil mantener los parámetros de calidad por encima de un umbral para todo
instante de tiempo por combatir este fenómeno se han desarrollado herramientas
como los códigos convolucionles que permiten identificar los errores que se
produjeron y corregirlos.
Para la implementación tanto de la modulación como la codificación de canal en
hardware los dispositivos Field Programmable Gate Array(FPGA) son una opción
altamente viable porque tienen la ventaja que posibilita modificar una
determinada acción cambiando el código y también se reconfigura el FPGA
cambiando la forma de interconexión de las celdas; todo esto sin hacer cambios
en el Hardware.
Sin embargo, los métodos de programación actuales han limitado la
accesibilidad a subsistemas de procesamiento de señales basados en FPGAs.
Esta situación ha cambiado en los últimos años con la aparición de una nueva
clase de programación en FPGA basados en el alto nivel de modelado de
MATLAB y SIMULINK.
System Generator es una plataforma software que usa las herramientas de The
MathWorks MATLAB/Simulink para representar una visión abstracta de alto nivel
del sistema de comunicaciones, y que automáticamente genera el código VHDL
de la función de DSP desarrollada usando los más optimizados LogiCOREs de
Xilinx, asegurándonos así que se ha producido la implementación más eficiente
del diseño.
III
DEDICATORIA
A Dios, a mis padres y hermanos que han estado presentes en mi vida en todo
momento y que me han dando la fuerza y confianza para hacer de cualquier
dificultad una oportunidad.
IV
AGRADECIMIENTO
A mi padre por su ejemplo de tenacidad, responsabilidad e integridad y A mí
madre por su fuerza, valor y la cualidad de pensar siempre en el bienestar de
los demás.
A mis queridas tías por que han estado conmigo y me han apoyado en los
momentos más importantes de mi vida.
A mis compañeros y amigos de la Universidad por hacer de cada proyecto un
momento para fortalecer nuestra amistad. En especial a Karina por su
preocupación y compañía.
A mi Director y Codirector de tesis, Julio Larco y Byron Navas por ofrecerme toda
su ayuda y conocimientos para el desarrollo de este documento.
A mis amigos de siempre por ser fuente de inspiración en cada paso que doy y
estar siempre a mi lado.
V
PRÓLOGO
Para una mejor organización y comprensión, este proyecto se ha orientado de
forma metódica y siguiendo un orden claro y conciso que consiste en estudio
teórico un estudio de las herramientas de desarrollo, elaboración del diseño,
simulación e implementación.
Este proyecto pretende desarrollar en una Field Programmable Gate Array
(FPGA), la etapa de recepción de un sistema de comunicaciones utilizando una
modulación BPSK y QPSK con códigos convolucionales. Para ello, inicialmente
se realiza un estudio sobre la modulación BPSK, QPSK y los códigos
convolucionales para familiarizarse con todas sus características y situar el
objetivo final.
Una parte importante del trabajo, es la familiarización con el entorno de
programación de FPGAs, que utilizan un lenguaje HDL. Para el desarrollo del
sistema se utiliza System Generator de Xilinx, que se ejecuta sobre
Matlab/Simulink, y que mediante bloques predefinidos, permite la programación
gráfica del lenguaje HDL.
Para la implementación se dispone de la placa Spartan-3E Starter Kit, que entre
otros dispositivos está formada por un FPGA Spartan-3E a 50 MHz, convertidores
DAC (Digital Analog Converter) y ADC (Analog Digital Converter), un puerto VGA,
dos puertos RS- 232, LEDs, un display, interruptores y botones, etc.
Finalmente se realizan simulaciones para comprobar el funcionamiento de cada
etapa del receptor y se compara las diferencias cuando el sistema es
implementado en el FPGA.
VI
INDICE DE CONTENIDOS
CAPÍTULO I
1. MODULACIÓN DIGITAL ................................................................................. 1
1.1 Modulación PSK ....................................................................................... 1
1.2 Trasmisor BPSK ....................................................................................... 2
1.2.1 Ancho de banda para BPSK ............................................................. 3
1.2.2 Receptor BPSK .................................................................................. 4
1.3 Modulación QPSK ................................................................................... 5
1.3.1 Transmisor QPSK .............................................................................. 6
1.3.2 Ancho de Banda para QPSK ............................................................. 8
1.3.3 Receptor QPSK .................................................................................. 9
1.4 Aplicaciones de la modulación PSK ..................................................... 11
2. CODIFICACIÓN DE CANAL ......................................................................... 12
2.1 Códigos de Bloque ................................................................................. 15
2.2 Códigos Convolucionales ..................................................................... 16
2.2.1 Árbol de código ............................................................................... 17
2.2.2 Diagrama de Trellis .......................................................................... 18
2.2.3 Decodificación de Códigos Convolucionales ............................... 19
2.3 Distancia libre de un Código Convolucional ....................................... 21
2.4 Aplicaciones Códigos Convolucionales .............................................. 21
3. TECNOLOGIAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS .. 22
3.1 Introducción a la Tecnología FPGA ...................................................... 22
3.2 Historia de la Tecnología FPGA ............................................................ 23
3.3 Arquitectura de un FPGA ...................................................................... 26
3.3.1 Bloques lógicos (CLBs) .................................................................. 26
VII
3.3.2 Tecnologías de Programación ........................................................ 28
3.3.3 Bloques de Entrada y Salida ........................................................... 30
3.3.4 Líneas de Interconexión .................................................................. 30
3.3.5 Recursos internos de los FPGA actuales. ..................................... 32
3.4 Flujo de diseño utilizando FPGAs ........................................................ 33
3.4.1 Descripción del Modelo................................................................... 34
3.4.2 Síntesis del Modelo ......................................................................... 40
3.4.3 Implementación del Modelo ............................................................ 40
3.4.4 Análisis de Tiempos ........................................................................ 40
3.4.5 Puesta en Producción ..................................................................... 41
3.5 Herramientas de Implementación ......................................................... 41
3.5.1 Tipos de Usuarios y Acciones ........................................................ 42
3.5.2 Herramientas Xilinx ......................................................................... 44
3.5.3 Descripción del entorno de desarrollo ISE.................................... 45
3.5.4 IMPACT ............................................................................................. 46
3.5.5 PlanAhead ........................................................................................ 46
3.5.6 Xilinx ChipScope Pro ...................................................................... 47
3.5.7 EDK (Embedded Development Kit) ................................................ 48
3.5.8 SDK (Software Development Kit) ................................................... 49
3.6 System Generator .................................................................................. 49
3.6.1 Requisitos y Recomendaciones para la Instalación .................... 51
3.6.2 Blockset de Xilinx en Simulink ....................................................... 52
3.6.3 Tipos de Señales en System Generator ........................................ 54
3.6.4 Bloque System Generator ............................................................... 55
3.6.5 Importación de Código .................................................................... 62
4. SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR .............................. 64
4.1 Introducción ........................................................................................... 64
VIII
4.2 Tarjeta de Desarrollo Spartan 3-E ......................................................... 65
4.3 Conversor Análogo Digital .................................................................... 66
4.3.1 Integración del componente ADC a System Generator ............... 71
4.3.2 Comprobación del funcionamiento del ADC en tiempo real
mediante Chipscope Pro Analyzer. .............................................................. 75
4.4 Demodulador .......................................................................................... 80
4.4.1 Demodulador BPSK ......................................................................... 80
4.4.2 Demodulador QPSK ........................................................................ 87
4.5 Decodificador Viterbi ............................................................................. 91
5. ANÁLISIS DE RESULTADOS ...................................................................... 95
5.1 Compilación Hardware Co-Simulation ................................................. 95
5.2 Señales simuladas vs Señales reales. ................................................. 97
5.3 Características de las señales implementadas en el FPGA ............... 98
CONCLUSIONES Y RECOMENDACIONES ...................................................... 101
REFERENCIAS BIBLIOGRÁFICAS ................................................................... 104
IX
INDICE DE TABLAS
Tabla 1.1 Valores de fase de la modulación QPSK ................................................. 7
Tabla 3.1 Paquetes de Herramientas Xilinx .......................................................... 42
Tabla 3.2 Basado en Recomendaciones para Windows ....................................... 51
Tabla 3.3 Basado en Recomendaciones para Linux ............................................. 51
Tabla 3.4 Requisitos del sistema Operativo Windows y del software .................... 51
Tabla 3.5 Bibliotecas de Xilinx Blockset ................................................................ 52
Tabla 3.6 Bibliotecas de Xilinx Reference Blockset ............................................... 53
Tabla 4.1 Desactivar otros dispositivos en el bus SPI ........................................... 68
Tabla 4.2 Configuración de ganancia para el preamplificador programable. ........ 69
X
INDICE DE FIGURAS
Figura 1.1 Esquema de un modulador BPSK .......................................................... 2
Figura 1.2 Forma de onda de una modulación BPSK ............................................. 3
Figura 1.3 (a) Diagrama de Constelación. (b) Diagrama Fasorial. .......................... 3
Figura 1.4 Relación de la fase de salida con el tiempo para un modulador BPSK .. 4
Figura 1.5 Componentes receptor BPSK ................................................................ 5
Figura 1.6 Componentes modulador QPSK ........................................................... 7
Figura 1.7 Componentes demodulador QPSK ....................................................... 9
Figura 2.1 Sistema de comunicaciones con corrección de errores directa ........... 14
Figura 2.2 Clasificación de códigos de canal ....................................................... 14
Figura 2.3 Codificador de bloque .......................................................................... 15
Figura 2.4 Estructura de un codificador convolucional simple. .............................. 16
Figura 2.5 Árbol de código. ................................................................................... 18
Figura 2.6 Diagrama de Trellis. ............................................................................. 19
Figura 2.7 Probabilidad de error Hard y Sotf Decision .......................................... 20
Figura 3.1 Esquema básico de un FPGA .............................................................. 25
Figura 3.2 Arquitectura general de un FPGA ........................................................ 26
Figura 3.3 Estructura de un bloque lógico ............................................................. 27
Figura 3.4 Matrices de Interconexión ................................................................... 31
Figura 3.5 Flujo de Diseño para FPGA ................................................................. 33
Figura 3.6 Diagrama Esquemático ........................................................................ 34
Figura 3.7 Modelo VHDL de Hardware ................................................................. 37
Figura 3.8 Ventana Proyect Navigator .................................................................. 45
Figura 3.9 Herramienta IMPACT ........................................................................... 46
Figura 3.10 Diagrama de Conexión con ChipScopePro ........................................ 48
Figura 3.11 Bloques Xilinx Dps para simulink ....................................................... 50
XI
Figura 3.12 Blockset de Xilinx en Toobox de Simulink .......................................... 54
Figura 3.13 Parámetros del bloque System Generator ......................................... 56
Figura 3.14 Clock Enables para diferentes periodos de muestra. ......................... 61
Figura 4.1 Componentes del Receptor .................................................................. 64
Figura 4.2 Tarjeta de Desarrollo Spartan 3E ......................................................... 66
Figura 4.3 Esquema del amplificador y ADC ........................................................ 67
Figura 4.4 Secuencia de datos del ADC ............................................................... 69
Figura 4.5 Salida Digital en complemento a dos con ganancia 1. ......................... 70
Figura 4.6 Organización del Diseño ...................................................................... 71
Figura 4.7 Ventana para le selección del archivo HDL .......................................... 72
Figura 4.8 BLACK BOX del modulo top del ADC .................................................. 72
Figura 4.9 Archivo M-FILE del BLACK BOX del ADC ........................................... 73
Figura 4.10 Ventana de Configuración de System Generator. .............................. 74
Figura 4.11 Conexión bloque Chipscope .............................................................. 75
Figura 4.12 Ventana de configuración del bloque ChipScope ............................... 76
Figura 4.13 Ventana ChipScope Analyzer............................................................. 77
Figura 4.14 Ventana Trigger Setup ....................................................................... 77
Figura 4.15 Ventana Waveform ............................................................................. 77
Figura 4.16 Ventana Bus Plot ................................................................................ 78
Figura 4.17 Señal digitalizada con ganancia 1. ..................................................... 78
Figura 4.18 Señal digitalizada con ganancia 2. ..................................................... 79
Figura 4.19 Señal digitalizada con ganancia 5. ..................................................... 79
Figura 4.20 Componentes del demodulador BPSK en System Generator. ........... 80
Figura 4.21 Ventana de configuración del bloque DDS Compiler. ........................ 81
Figura 4.22 Ventana de configuración del bloque DAFIR. .................................... 82
Figura 4.23 Ventana de la Herramienta FDATool. ................................................ 83
XII
Figura 4.24 Ventana de Configuración del bloque MCODE .................................. 84
Figura 4.25 Simulación de las Etapas del demodulador BPSK en Simulink.......... 85
Figura 4.26 Señal modulada BPSK en tiempo real. .............................................. 86
Figura 4.27 Producto de la señal BPSK por la señal portadora en tiempo real. .. 86
Figura 4.28 Respuesta del Filtro pasa-bajos en tiempo real ................................. 86
Figura 4.29 Datos demodulados BPSK ................................................................. 87
Figura 4.30 Componentes del demodulador QPSK en System Generator ........... 87
Figura 4.31 Configuración del Filtro pasa-bajos para QPSK ................................. 88
Figura 4.32 Simulación del canal I. ....................................................................... 89
Figura 4.33 Simulación del canal Q. ...................................................................... 89
Figura 4.34 Señal modulada QPSK en Tiempo Real ............................................ 90
Figura 4.35 Producto de la señal QPSK del canal I en tiempo real. ..................... 90
Figura 4.36 Respuesta del Filtro pasa-bajos en el canal I ..................................... 91
Figura 4.37 Señal Original, datos pares e impares ............................................... 91
Figura 4.38 Componentes del Decodificador en System Generator ..................... 92
Figura 4.39 Ventana de Configuración del bloque Viterbi decoder ...................... 92
Figura 4.40 Señal original, señal demodulada, señal decodificada del sistema. ... 93
Figura 4.41 Señal original, señal demodulada, señal decodificada del sistema en
tiempo real. ............................................................................................................ 94
Figura 5.1 Opciones de Configuración para Hardware Co-Simulation .................. 95
Figura 5.2 Configuración Hardware Co-Simulation de la tarjeta Spartan 3e ......... 96
Figura 5.3 Bloque para Hardware Co-Simulation .................................................. 96
Figura 5.4 Señales simuladas y señales implementadas en el FPGA .................. 97
Figura 5.5 Diagrama de constelación. ................................................................... 98
Figura 5.6 Diagrama de Trayectoria. .................................................................... 99
Figura 5.7 Diagrama del OJO. ............................................................................. 100
XIII
GLOSARIO
ADC Conversor Análogo Digital.
ASIC Circuitos Integrados para Aplicaciones Específicas.
ASK Modulación por Desplazamiento de Amplitud.
ASSP Producto de Estándar Específico de Aplicación.
BPSK Modulación por Desplazamiento de Fase Binaria.
CAD: Diseño Asistido por computadora u Ordenador.
CAE Ingeniería Asistida por computadora u Ordenador.
CDMA Acceso Múltiple por División de Código.
CLB Bloque Lógico Programable.
CMOS Estructuras Semiconductor-Óxido-Metal
Complementarias.
CORE Núcleo.
BlockSet Conjunto de bloques.
CPLD Dispositivo Lógico Programable Complejo.
DAC Conversor Digital Análogo.
DDS Compiler Compilador de un Sintetizador Digital Directo.
XIV
DRAM Memoria de Acceso Aleatorio Dinámico.
DSP Procesamiento Digital de Señales.
EDA Automatización de Diseño Electrónico.
EEPROM Memoria de solo Lectura Programable y Borrable
Eléctricamente.
EPROM Memoria de solo Lectura Programable y Borrable.
FEC Corrección de Errores hacia Adelante.
Flip-Flop Es un circuito oscilador de onda cuadrada, capaz de
permanecer en un estado determinado o en el contrario
durante un tiempo indefinido.
FPGA Matriz de puertas programables.
FSK Modulación por Desplazamiento de Frecuencia.
HDL Lenguaje de Descripción de Hardware.
IDE Ambiente de diseño Integrado.
XSG Xilinx System Generator.
IEEE Instituto de Ingenieros Eléctricos y Electrónicos.
ISO Organización Internacional para la Estandarización.
ISO 14443 Es un estándar internacional relacionado con las
tarjetas de identificación electrónicas, en especial las
tarjetas inteligentes.
XV
LUT Tabla de Consulta.
PLD Dispositivo Lógico Programable.
PROM Memoria de sólo Lectura Programable.
PSK Modulación por desplazamiento de Fase.
QPSK Modulación por Desplazamiento de Fase en
Cuadratura.
RAM Memoria de Acceso Aleatorio.
RFID Identificación por Radiofrecuencia.
ROM Memoria de solo Lectura.
RTL Nivel de la Transferencia de Registro.
SRAM Memoria Estática de acceso Aleatorio.
VERILOG Lenguaje de Descripción de Hardware.
VHDL Lenguaje textual de alto nivel que se utiliza para la
descripción del hardware de los sistemas digitales.
CAPITULO I
1. MODULACIÓN DIGITAL
Las señales de datos de terminales digitales y dispositivos afines,
generalmente no se transmiten a gran distancia en la forma de señal de banda de
base, es decir, tal como se generan, sino que se transmiten en forma de una
señal modulada en forma analógica, en efecto, los impulsos o dígitos binarios
modulan una portadora sinusoidal cuya frecuencia es compatible con el medio de
transmisión utilizado; este tipo de transmisión se denomina ―Transmisión Binaria
mediante Portadora Modulada o transmisión en banda ancha‖.[1]
Modular básicamente consiste en convertir una señal digital en una señal
analógica que irá variando su amplitud, frecuencia, fase o bien amplitud y fase
conjuntamente, según los valores que vaya tomando la señal digital de
información. De esta manera, aparecen distintas técnicas de modulación de
señales digitales según el tipo de modulación empleado.
1.1 Modulación PSK
PSK es un esquema de modulación digital extenso. La modulación PSK se
caracteriza porque la fase de la señal portadora representa cada símbolo de
información de la señal moduladora. PSK es ampliamente usado en la industria
de las comunicaciones y es la base para otros tipos de modulación como DS-
CDMA1y OFDM2.
1 Acceso múltiple por división de código en secuencia directa
2 Multiplexación por División de Frecuencias Ortogonales
2 CAPÍTULO I – MODULACIÓN DIGITAL
1.2 Trasmisor BPSK
El transmisor por desplazamiento de fase binaria permite obtener dos fases de
salida con una sola portadora. Una fase de salida representa un 1 lógico y la otra
un 0 lógico. Si la señal de entrada en el modulador cambia de estado, la fase de
la portadora de salida se desplaza entre ángulos que están 180°fuera de fase. La
es de la forma.
(1.1)
donde son los valores de los símbolos binarios asignados a la entrada
binaria, es la respuesta impulsional de filtro conformador o filtro transmisor,
frecuencia portadora y el tiempo de símbolo, que por ser una modulación
binaria coincide con el tiempo de bit Tb.
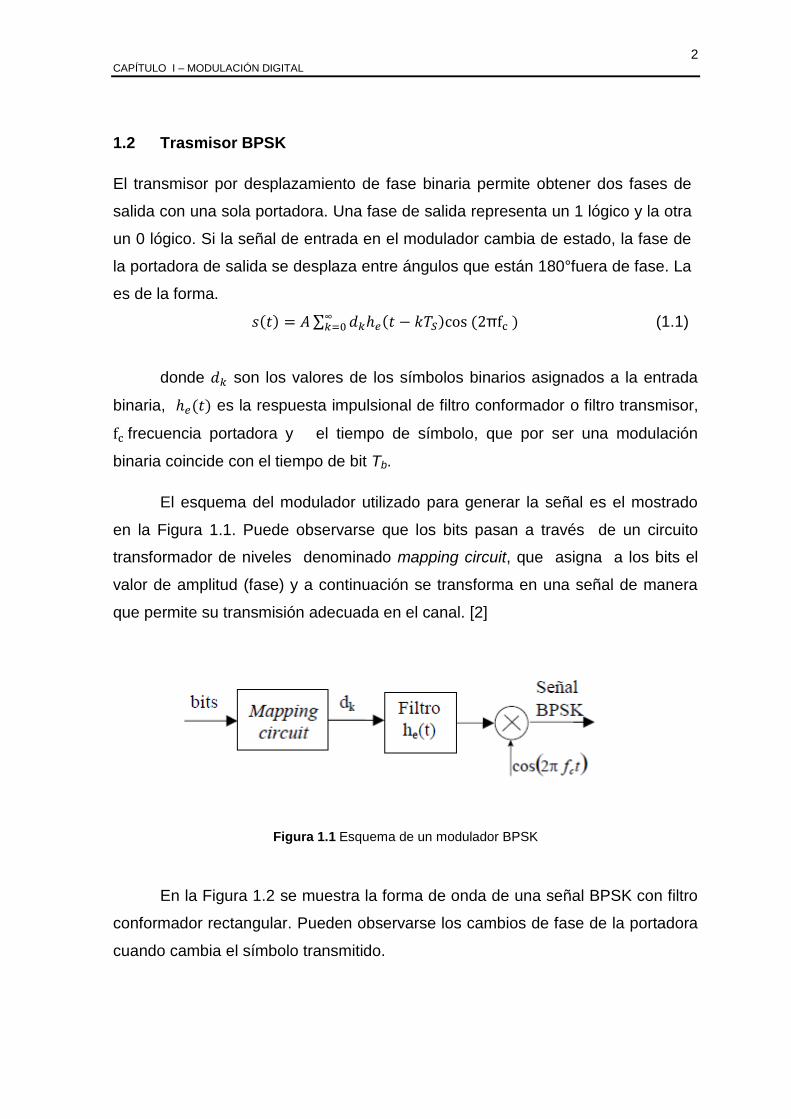
El esquema del modulador utilizado para generar la señal es el mostrado
en la Figura 1.1. Puede observarse que los bits pasan a través de un circuito
transformador de niveles denominado mapping circuit, que asigna a los bits el
valor de amplitud (fase) y a continuación se transforma en una señal de manera
que permite su transmisión adecuada en el canal. [2]
Figura 1.1 Esquema de un modulador BPSK
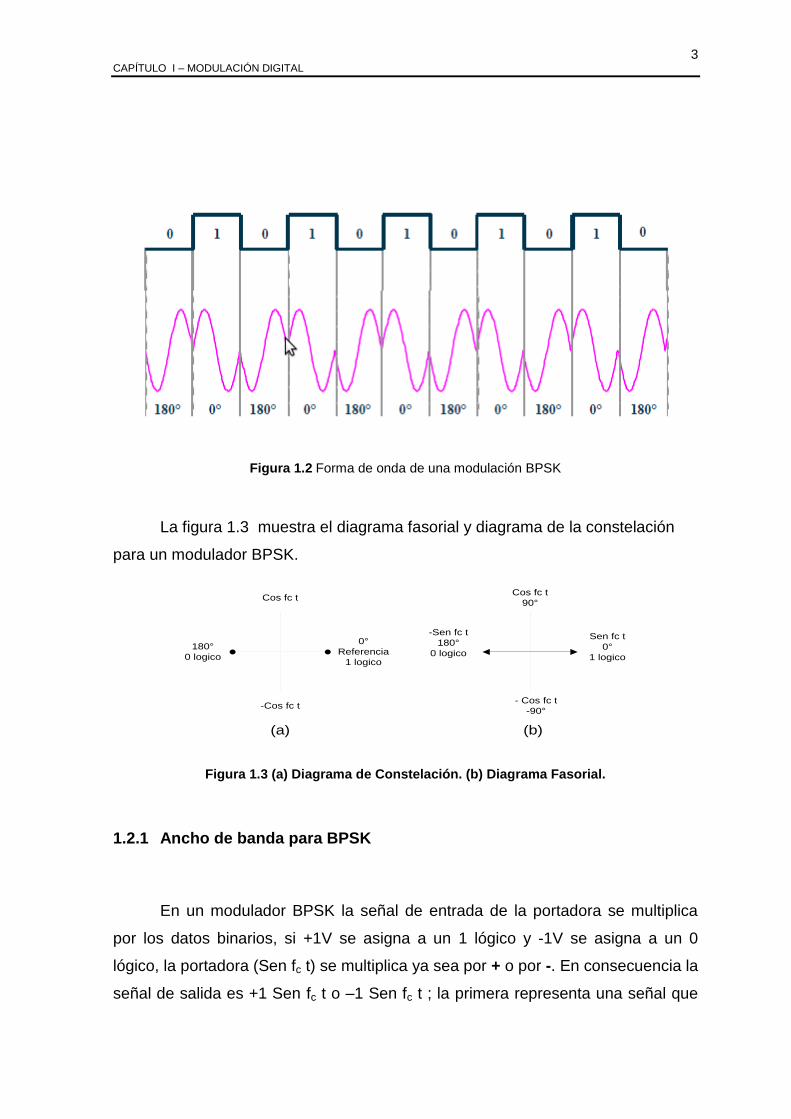
En la Figura 1.2 se muestra la forma de onda de una señal BPSK con filtro
conformador rectangular. Pueden observarse los cambios de fase de la portadora
cuando cambia el símbolo transmitido.
3 CAPÍTULO I – MODULACIÓN DIGITAL
Figura 1.2 Forma de onda de una modulación BPSK
La figura 1.3 muestra el diagrama fasorial y diagrama de la constelación
para un modulador BPSK.
0°
Referencia
1 logico
-Cos fc t
180°
0 logico
Cos fc t
Sen fc t
0°
1 logico
Cos fc t
90°
-Sen fc t
180°
0 logico
- Cos fc t
-90°
(a) (b)
Figura 1.3 (a) Diagrama de Constelación. (b) Diagrama Fasorial.
1.2.1 Ancho de banda para BPSK
En un modulador BPSK la señal de entrada de la portadora se multiplica
por los datos binarios, si +1V se asigna a un 1 lógico y -1V se asigna a un 0
lógico, la portadora (Sen fc t) se multiplica ya sea por + o por -. En consecuencia la
señal de salida es +1 Sen fc t o –1 Sen fc t ; la primera representa una señal que
4 CAPÍTULO I – MODULACIÓN DIGITAL
está en fase con el oscilador local, la segunda una señal que esta 180° fuera de
fase, cada vez que cambia la condición de entrada cambia la salida. En
consecuencia para BPSK la razón de cambio de salida (BAUDIO) es igual a la
razón de cambio de entrada (bits/s) y el ancho de banda más grande ocurre
cuando los datos binarios a la entrada son una secuencia alternativa de unos y
ceros.
La frecuencia fundamental (fm) de una secuencia alternativa de bits 1/0 es
igual a la mitad de la razón de bits (fb/2).
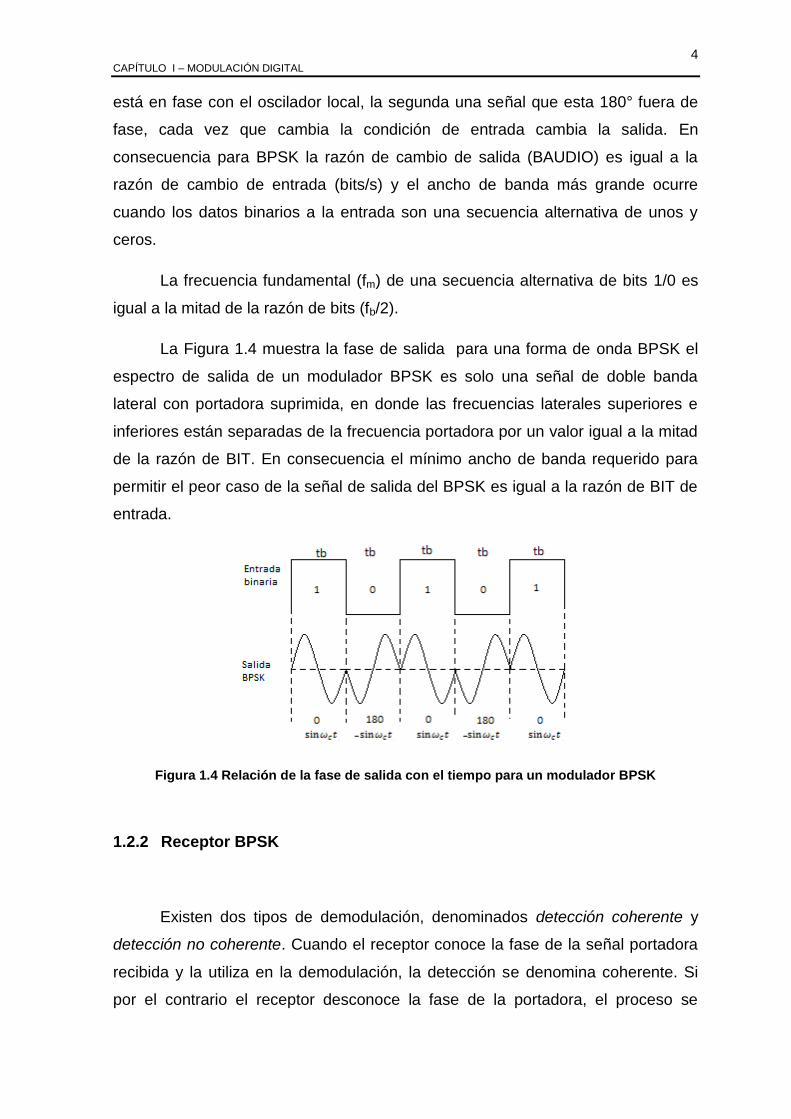
La Figura 1.4 muestra la fase de salida para una forma de onda BPSK el
espectro de salida de un modulador BPSK es solo una señal de doble banda
lateral con portadora suprimida, en donde las frecuencias laterales superiores e
inferiores están separadas de la frecuencia portadora por un valor igual a la mitad
de la razón de BIT. En consecuencia el mínimo ancho de banda requerido para
permitir el peor caso de la señal de salida del BPSK es igual a la razón de BIT de
entrada.
Figura 1.4 Relación de la fase de salida con el tiempo para un modulador BPSK
1.2.2 Receptor BPSK
Existen dos tipos de demodulación, denominados detección coherente y
detección no coherente. Cuando el receptor conoce la fase de la señal portadora
recibida y la utiliza en la demodulación, la detección se denomina coherente. Si
por el contrario el receptor desconoce la fase de la portadora, el proceso se
5 CAPÍTULO I – MODULACIÓN DIGITAL
denomina no coherente. En comunicaciones digitales los términos demodulación y
detección se usan a menudo indistintamente, aunque demodulación enfatiza la
eliminación de la portadora y detección incluye el proceso de la decisión del
símbolo transmitido. La ventaja de la demodulación no coherente es que no
necesita estimar el valor de la fase de la señal recibida, lo que redunda en una
mayor sencillez de implementación. Esto se logra a costa de un incremento en la
probabilidad de error. El conocimiento de la fase de llegada de la portadora de la
señal recibida, necesario para poder llevar a cabo una demodulación coherente,
requiere el uso de un circuito de estimación de dicha fase.
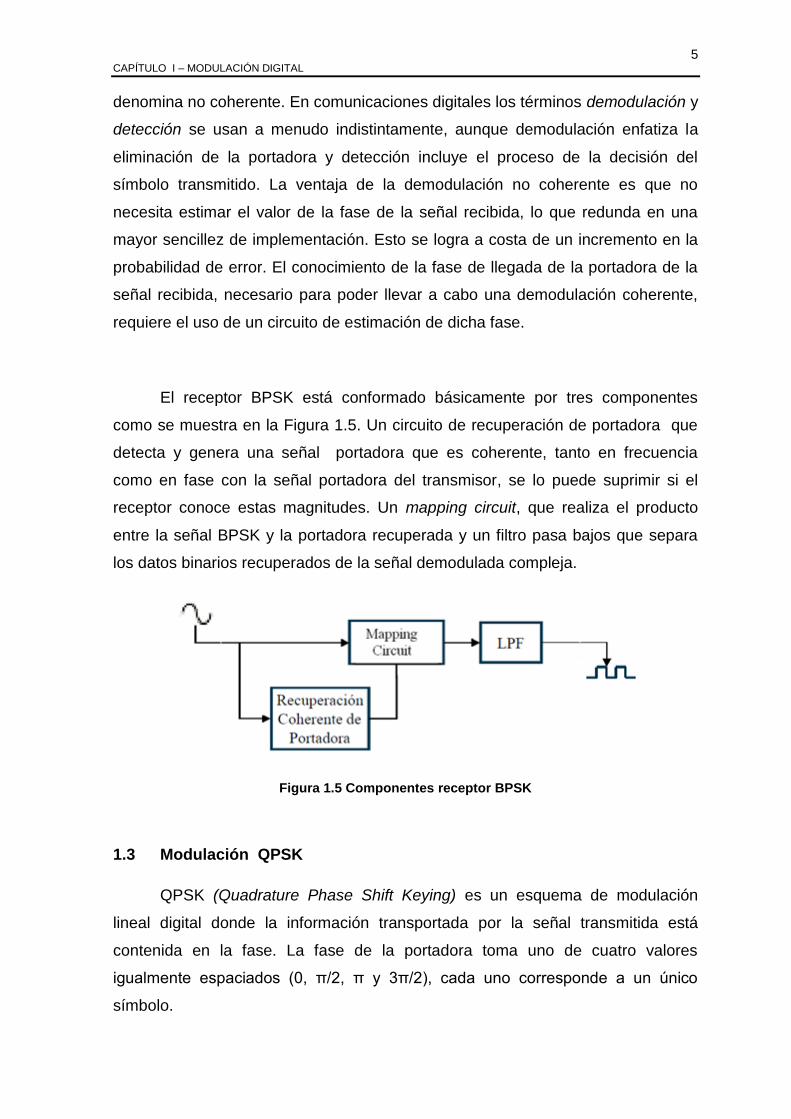
El receptor BPSK está conformado básicamente por tres componentes
como se muestra en la Figura 1.5. Un circuito de recuperación de portadora que
detecta y genera una señal portadora que es coherente, tanto en frecuencia
como en fase con la señal portadora del transmisor, se lo puede suprimir si el
receptor conoce estas magnitudes. Un mapping circuit, que realiza el producto
entre la señal BPSK y la portadora recuperada y un filtro pasa bajos que separa
los datos binarios recuperados de la señal demodulada compleja.
Figura 1.5 Componentes receptor BPSK
1.3 Modulación QPSK
QPSK (Quadrature Phase Shift Keying) es un esquema de modulación
lineal digital donde la información transportada por la señal transmitida está
contenida en la fase. La fase de la portadora toma uno de cuatro valores
igualmente espaciados (0, /2, y 3 /2), cada uno corresponde a un único
símbolo.
6 CAPÍTULO I – MODULACIÓN DIGITAL
Ya que la entrada digital a un modulador QPSK es una señal binaria
(base2) para producir cuatro condiciones diferentes de entrada, se necesita más
de un solo BIT de entrada, con dos bits hay 4 posibles condiciones: 00,01,10 y
11.En consecuencia con QPSK los datos de entrada binarios se combinan en
grupos de 2 bits llamados dibits. Cada dibit genera una de las cuatro fases de
entrada posibles por tanto para un dibit (2 bits) introducido al modulador ocurre un
solo cambio a la salida.
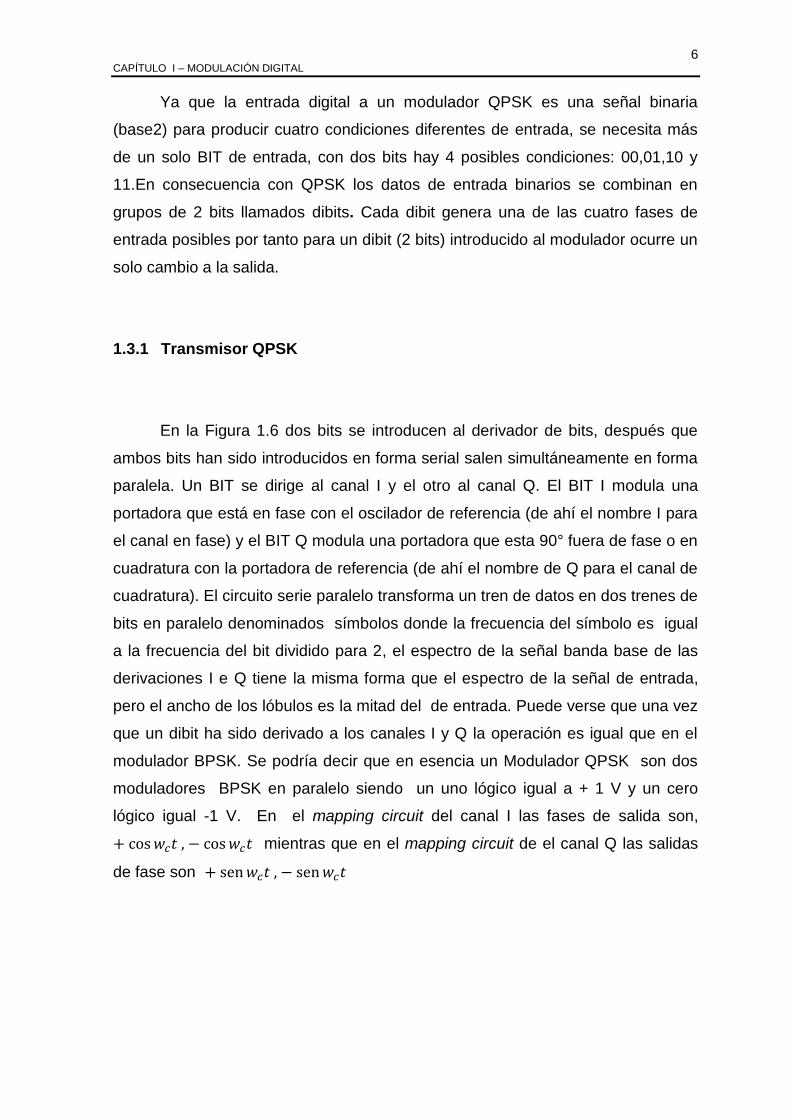
1.3.1 Transmisor QPSK
En la Figura 1.6 dos bits se introducen al derivador de bits, después que
ambos bits han sido introducidos en forma serial salen simultáneamente en forma
paralela. Un BIT se dirige al canal I y el otro al canal Q. El BIT I modula una
portadora que está en fase con el oscilador de referencia (de ahí el nombre I para
el canal en fase) y el BIT Q modula una portadora que esta 90° fuera de fase o en
cuadratura con la portadora de referencia (de ahí el nombre de Q para el canal de
cuadratura). El circuito serie paralelo transforma un tren de datos en dos trenes de
bits en paralelo denominados símbolos donde la frecuencia del símbolo es igual
a la frecuencia del bit dividido para 2, el espectro de la señal banda base de las
derivaciones I e Q tiene la misma forma que el espectro de la señal de entrada,
pero el ancho de los lóbulos es la mitad del de entrada. Puede verse que una vez
que un dibit ha sido derivado a los canales I y Q la operación es igual que en el
modulador BPSK. Se podría decir que en esencia un Modulador QPSK son dos
moduladores BPSK en paralelo siendo un uno lógico igual a + 1 V y un cero
lógico igual -1 V. En el mapping circuit del canal I las fases de salida son,
mientras que en el mapping circuit de el canal Q las salidas
de fase son
7 CAPÍTULO I – MODULACIÓN DIGITAL
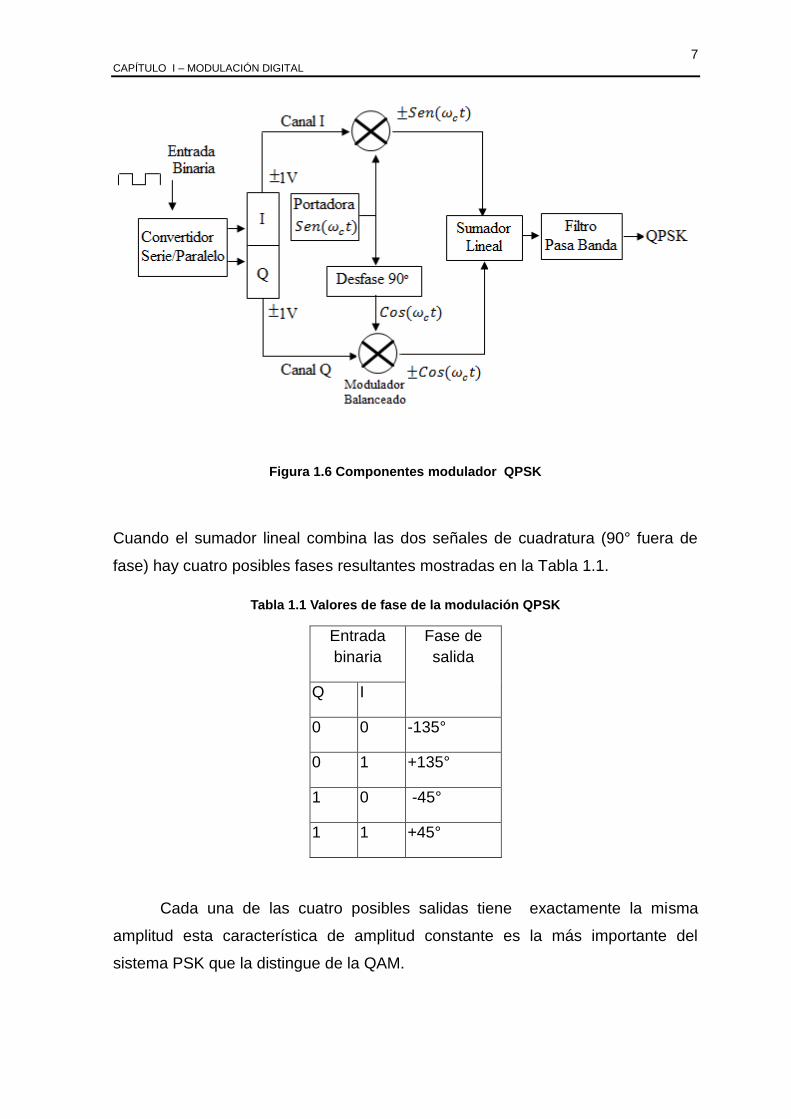
Figura 1.6 Componentes modulador QPSK
Cuando el sumador lineal combina las dos señales de cuadratura (90° fuera de
fase) hay cuatro posibles fases resultantes mostradas en la Tabla 1.1.
Tabla 1.1 Valores de fase de la modulación QPSK
Entrada
binaria
Fase de
salida
Q I
0 0 -135°
0 1 +135°
1 0 -45°
1 1 +45°
Cada una de las cuatro posibles salidas tiene exactamente la misma
amplitud esta característica de amplitud constante es la más importante del
sistema PSK que la distingue de la QAM.
8 CAPÍTULO I – MODULACIÓN DIGITAL
La fase de la portadora toma 1 de 4 valores espaciados equitativamente, es
decir pueden ser como en el caso anterior /4,3 /4,5 /4,7 /4 o también 0, /2, ,
3 /2,cada uno de los cuales corresponden a un único par del mensaje de bits.El
filtro pasa banda que se coloca a la salida del modulador QPSK lo que hace es
eliminar los armónicos no significativos de la señal modulada para no interferir con
otras señales que pudieran transmitirse por ese mismo canal.
1.3.2 Ancho de Banda para QPSK
Ya que los datos de entrada se dividen en dos canales la tasa de bits
también se divide es decir, para el canal I es de fb/2 para el canal Q de fb/2
donde fb es la frecuencia de bit. En esencia el derivador de bits hace que los bits
I y Q tengan el doble de tamaño respecto al tamaño de los bits de entrada, en
consecuencia la frecuencia fundamental más alta presente a la entrada de datos
del modulador será de fb/4. Como resultado la salida de los moduladores
balanceados I y Q requiere de un mínimo de ancho de banda de Nyquist igual a la
mitad de la tasa de bits que están entrando; ya que el modulador genera dos
bandas laterales.
(1.2)
La salida de los moduladores balanceados puede expresarse matemáticamente
como:
(1.3)
Donde
y
9 CAPÍTULO I – MODULACIÓN DIGITAL
Salida del Modulador
(1.4.)
Por lo tanto el mínimo ancho de banda de Nyquist será:
(1.5.)
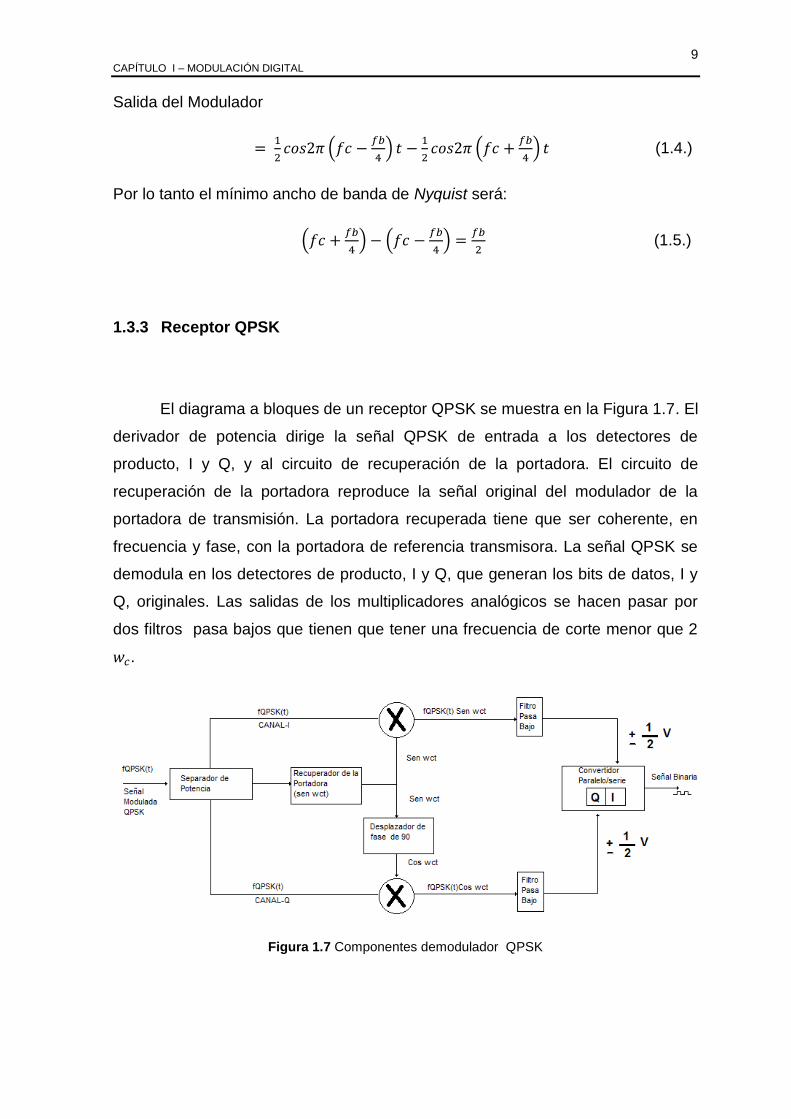
1.3.3 Receptor QPSK
El diagrama a bloques de un receptor QPSK se muestra en la Figura 1.7. El
derivador de potencia dirige la señal QPSK de entrada a los detectores de
producto, I y Q, y al circuito de recuperación de la portadora. El circuito de
recuperación de la portadora reproduce la señal original del modulador de la
portadora de transmisión. La portadora recuperada tiene que ser coherente, en
frecuencia y fase, con la portadora de referencia transmisora. La señal QPSK se
demodula en los detectores de producto, I y Q, que generan los bits de datos, I y
Q, originales. Las salidas de los multiplicadores analógicos se hacen pasar por
dos filtros pasa bajos que tienen que tener una frecuencia de corte menor que 2
.
Figura 1.7 Componentes demodulador QPSK

10 CAPÍTULO I – MODULACIÓN DIGITAL
Matemáticamente el proceso de demodulación se describe a seguir:
Suponiendo que el dibit transmitido es QI=10. Entonces las señal analógica
.
Análisis en el canal Q
=
=
=
Filtro pasa bajo
Análisis en el canal I
Filtro pasa bajo
Así queda comprobada la correcta recepción de los datos transmitidos por el
demodulador QPSK.
11 CAPÍTULO I – MODULACIÓN DIGITAL
1.4 Aplicaciones de la modulación PSK
Gracias a la simplicidad de la modulación PSK, especialmente cuando se
compara con su competidor de modulación de amplitud en cuadratura, es
ampliamente utilizada en las tecnologías ya existentes.
El estándar para redes inalámbricas de área local, IEEE 802.11b-1999, utiliza una
variedad de PSKs diferentes dependiendo de la velocidad de datos necesaria.
Para la transmisión de de 1 Mbit/s, se usa DBPSK (BPSK diferencial). Para la
transmisión de 2 Mbit/s se utiliza DQPSK. Para llegar a 5,5 Mbit/s y a una la
velocidad máxima de 11 Mbit/s, se utiliza QPSK, pero tiene que estar acoplado
con codificación de canal. El estandar IEEE 802.11g-2003 tiene ocho tipos de
datos: 6, 9, 12, 18, 24, 36, 48 y 54 Mbit/s. En los modos de 6 y 9 Mbit/s se utiliza
OFDM en el que cada sub-portadora es modulada con BPSK y en los modos 12 y
18 Mbit/s también se utiliza OFDM pero las sub-portadoras están moduladas con
QPSK.
Debido a su simplicidad BPSK es adecuado para transmisores pasivos de bajo
costo, y se ha utilizado en estándares RFID3 como el ISO / IEC 14443 que ha sido
adoptado para los pasaportes biométricos, tarjetas de crédito como American
Express ExpressPay, y muchas otras aplicaciones.
Bluetooth 2 utilizará-DQPSK en su tasa más baja (2 Mbit/s) y 8-DPSK en su tasa
más alta (3 Mbit/s) cuando el enlace entre los dos dispositivos es suficientemente
robusto. Bluetooth 1 modula con GMSK (Gaussian minimum shift keying), un
esquema binario, por lo que cualquiera de las opciones de modulación en la
versión 2 dará lugar a una mayor tasa de datos. Una tecnología similar, IEEE
802.15.4 (el estándar inalámbrico utilizado por ZigBee4) se basa también en PSK.
IEEE 802.15.4 permite el uso de dos bandas de frecuencia: 868-915 MHz usando
BPSK y en 2,4 GHz con OQPSK.
3 Siglas de Radio Frequency IDentification, en español identificación por radiofrecuencia.
4 Es el nombre de la especificación de un conjunto de protocolos de alto nivel de comunicación inalámbrica para su
utilización con radiodifusión digital de bajo consumo.
CAPÍTULO II
2. CODIFICACIÓN DE CANAL
Debido a la fluctuación del nivel de potencia de una señal en un entorno
móvil, es difícil mantener los parámetros de calidad por encima de un umbral para
todo instante de tiempo. Cuando se presentan intervalos más o menos largos por
debajo del nivel mínimo de umbral se producen errores en los bits transmitidos
que pueden degradar la comunicación. Para evitar este fenómeno es necesario
enviar la información codificada, añadiendo una redundancia que permita detectar
los errores; disminuye la probabilidad de error en el bit, para una determinada
relación señal a ruido.
La codificación de canal es un conjunto de procedimientos que se aplican
en la transmisión de una señal para poder manejar y optimizar el medio por donde
se propaga la información para evitar bits erróneos. El objetivo de la codificación
de canal es reducir la probabilidad de error o bien la relación señal a ruido (SNR)
necesaria para garantizar una cierta tasa de error. Este efecto se denomina
ganancia del código y se define como la reducción de la SNR requerida para
obtener una determinada probabilidad de error en el bit en un canal con ruido
gaussiano blanco.
Los bits redundantes que se utilizan para detectar y corregir errores tienen
que transformar las secuencias binarias en secuencias mejores que incluyan
redundancia estructurada. Existen dos estrategias diferentes para usar la
redundancia:
13 CAPÍTULO II – CODIFICACIÓN DE CANAL
Detección de errores y retransmisión. Es lo que se conoce como técnicas
ARQ (Automatic Repeat Request). Esta estrategia utiliza los bits de
redundancia (CRC5) para detectar si ha habido error. El receptor no intenta
corregir el error, sino que pide al transmisor que reenvíe el dato. Esta
estrategia implica la existencia de un canal de retorno que permita
comunicar al transmisor la recepción correcta o incorrecta de los bits
detectados. Además, únicamente puede utilizarse en sistemas de
comunicaciones en los que el retardo que implican las retransmisiones no
afecte a la calidad del servicio.
Corrección de errores. Estas técnicas se denominan FEC (Forward Error
Correction). En este caso, los bits de redundancia se utilizan para corregir
errores. Basta con un enlace unidireccional. Los códigos correctores de
errores se clasifican según su capacidad de corrección, que en todo caso
es limitada.
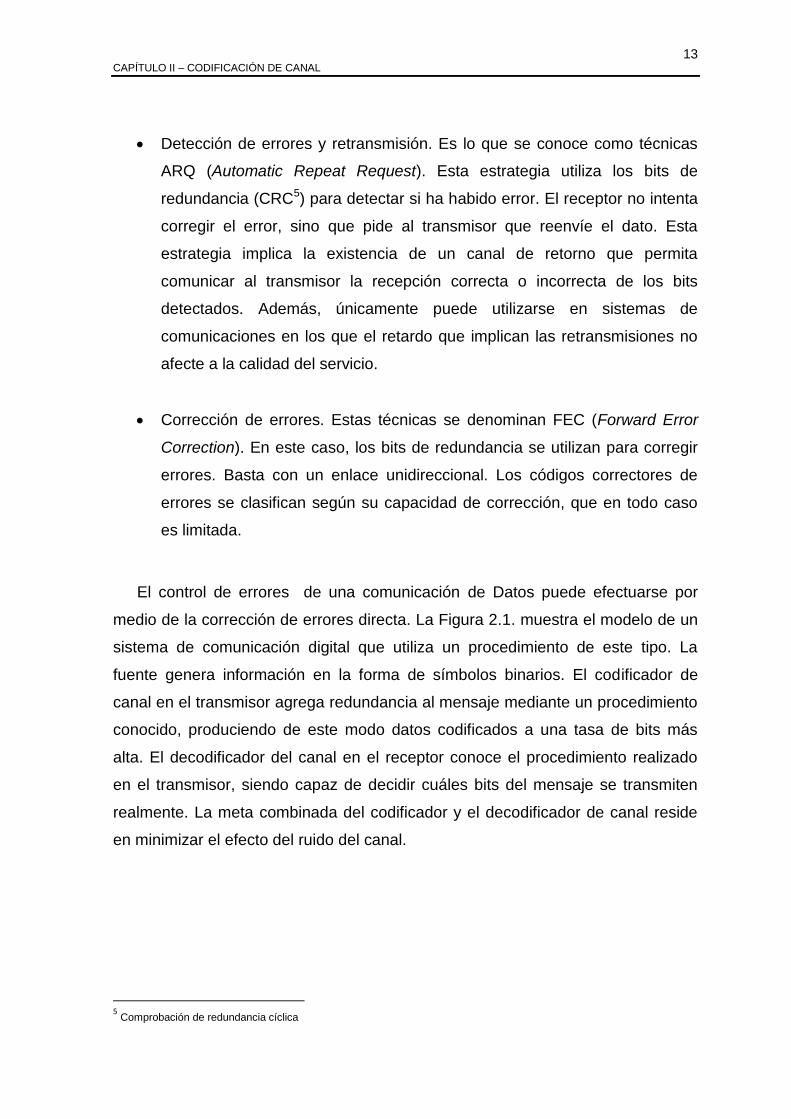
El control de errores de una comunicación de Datos puede efectuarse por
medio de la corrección de errores directa. La Figura 2.1. muestra el modelo de un
sistema de comunicación digital que utiliza un procedimiento de este tipo. La
fuente genera información en la forma de símbolos binarios. El codificador de
canal en el transmisor agrega redundancia al mensaje mediante un procedimiento
conocido, produciendo de este modo datos codificados a una tasa de bits más
alta. El decodificador del canal en el receptor conoce el procedimiento realizado
en el transmisor, siendo capaz de decidir cuáles bits del mensaje se transmiten
realmente. La meta combinada del codificador y el decodificador de canal reside
en minimizar el efecto del ruido del canal.
5 Comprobación de redundancia cíclica
14 CAPÍTULO II – CODIFICACIÓN DE CANAL
Figura 2.1 Sistema de comunicaciones con corrección de errores directa
En un sistema de modulación fijo, el aumento de redundancia al mensaje
implica la necesidad de aumentar el ancho de banda de la transmisión. Además el
uso de la codificación de control de errores añade complejidad al sistema,
sobretodo la decodificación en el receptor. Por esta razón el diseño de
codificación de control de errores tiene que considerar el ancho de banda y la
complejidad del sistema.
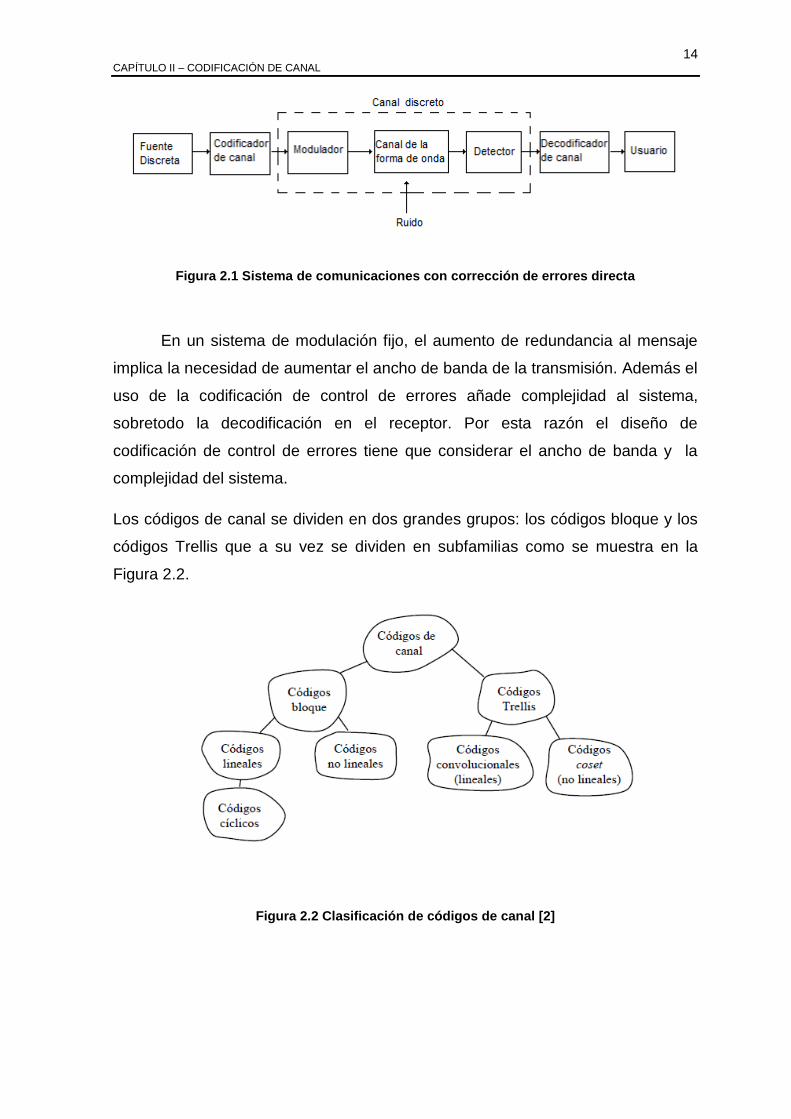
Los códigos de canal se dividen en dos grandes grupos: los códigos bloque y los
códigos Trellis que a su vez se dividen en subfamilias como se muestra en la
Figura 2.2.
Figura 2.2 Clasificación de códigos de canal [2]

15 CAPÍTULO II – CODIFICACIÓN DE CANAL
2.1 Códigos de Bloque
El mensaje en los códigos de bloque se divide en longitudes de k bits que
son los bits de información. Estas divisiones son los bloques que representan uno
entre los 2K mensajes distintos posibles. El codificador se encarga de modificar
cada división o bloque de k bits en un bloque de n bits, con n > k, generando así
la palabra código. La resta de los bits que componen la palabra de código y el
mensaje son los bits de redundancia o de paridad, que son los bits utilizados para
la corrección de errores. Para los 2k posibles mensajes, hay 2k palabras de
código. Un código de bloque es eficiente si las palabras código escogidas son las
adecuadas. La tasa de código, r, es el cociente entre los bits de información, k, y
la longitud de la palabra código, n.
(2.1)
Como se menciono anteriormente es necesario considerar el ancho de
banda disponible por esto se debe incrementar en razón de 1/r porque si se
desea que la velocidad de transmisión de los bits de información se mantenga, se
debe aumentar la velocidad de salida en un factor n/k, en el tiempo en que entran
k bits al codificador, éste debe enviar n bits, tal y como se refleja en la Figura 2.3.
(2.2)
Figura 2.3 Codificador de bloque

16 CAPÍTULO II – CODIFICACIÓN DE CANAL
2.2 Códigos Convolucionales
A diferencia de los códigos de bloque que utilizan bloques, los códigos
convolucionales utilizan el método de codificación de secuencias continuas. Un
codificador convolucional genera bits redundantes utilizando convoluciones
módulo 2 esto quiere decir que por cada bit que entra en el codificador se
obtienen n bits codificados.
Casi siempre los codificadores convolucionales tienen k entradas y n salidas con
m registros para cada entrada. Esto quiere decir que cada bit influye en n * m bits
de salida, m es longitud de influencia del código y la relación k/n es la tasa del
código. En la codificación es necesario que todos los bits sean modificados por
esto cuando un bit pasa por un registro se le añade m-1 bits, que son bits de cola
que generalmente son ceros.[3]
Figura 2.4 Estructura de un codificador convolucional simple.
El codificador de la Figura 2.4, está constituido por un registro de
desplazamiento con tres elementos de memoria y tres sumadores en módulo 2 o
17 CAPÍTULO II – CODIFICACIÓN DE CANAL
generadores de función, en los que se combinan los bits contenidos en las
memorias (flip-flops). El código de salida se obtiene conmutando secuencialmente
las salidas de los generadores de función durante el período de cada bit de
entrada, es decir, por cada bit de entrada se producen, en este caso 3 bits de
salida.
El primer flip-flop contiene al bit de entrada u1 y los dos siguientes,
almacenan los bits anteriores u0 y u-1. La selección de cuáles bits se suman para
producir cada uno de los bits de salida, se designa como polinomio generador del
código. Los polinomios generadores dan al código la calidad de la protección y
ocurre que dos códigos de igual designación, por ejemplo, pueden tener
propiedades completamente diferentes dependiendo de los polinomios
generadores elegidos para cada uno. Así, para un código de orden m hay
múltiples polinomios posibles y no todos producen secuencias ―buenas‖ desde el
punto de vista de protección contra errores.
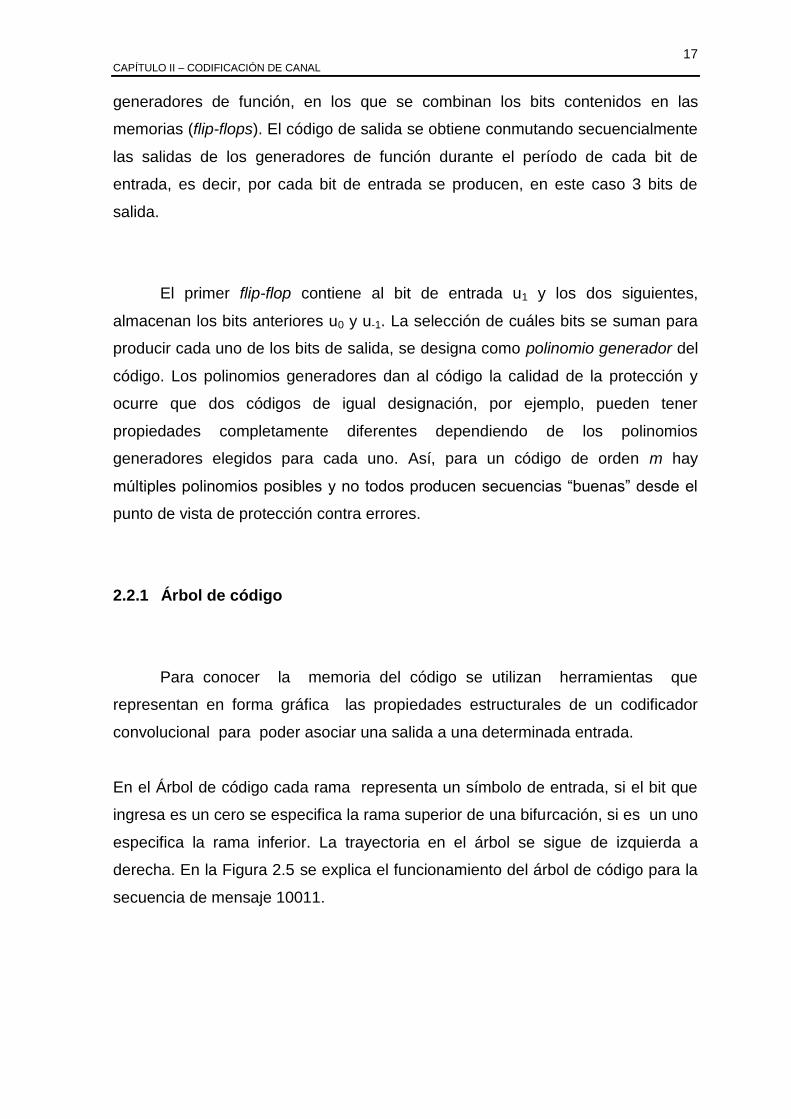
2.2.1 Árbol de código
Para conocer la memoria del código se utilizan herramientas que
representan en forma gráfica las propiedades estructurales de un codificador
convolucional para poder asociar una salida a una determinada entrada.
En el Árbol de código cada rama representa un símbolo de entrada, si el bit que
ingresa es un cero se especifica la rama superior de una bifurcación, si es un uno
especifica la rama inferior. La trayectoria en el árbol se sigue de izquierda a
derecha. En la Figura 2.5 se explica el funcionamiento del árbol de código para la
secuencia de mensaje 10011.
18 CAPÍTULO II – CODIFICACIÓN DE CANAL
Figura 2.5 Árbol de código.
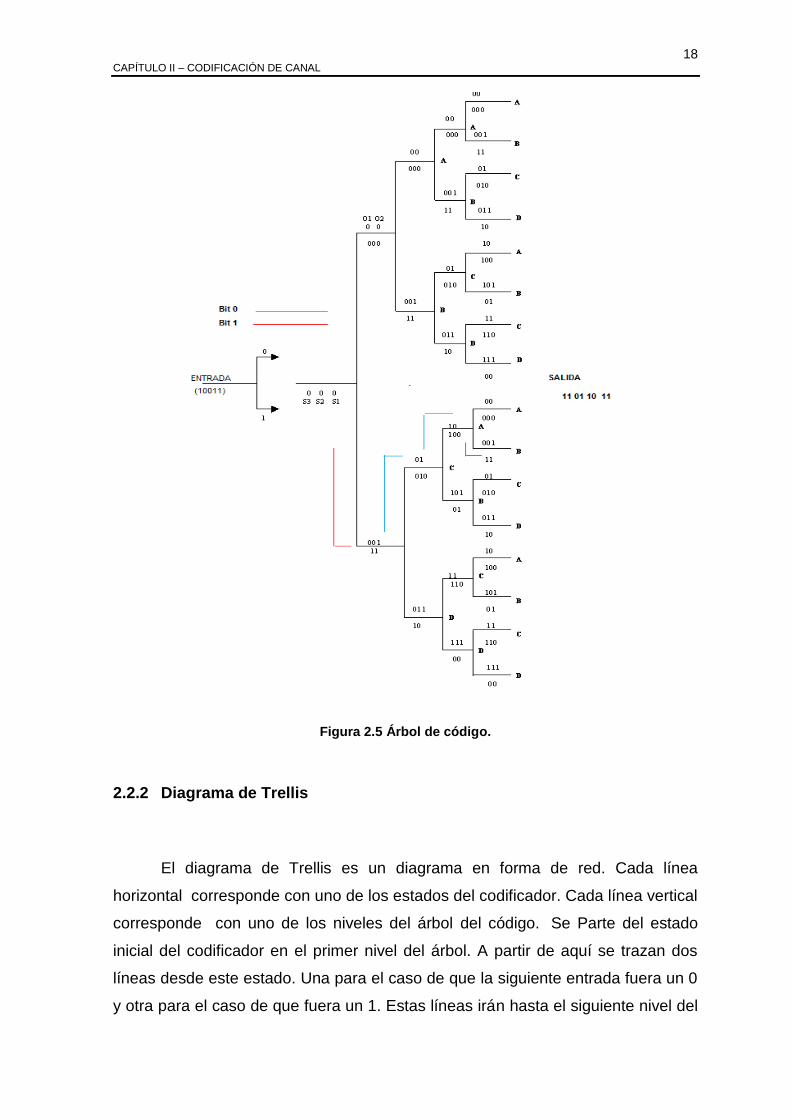
2.2.2 Diagrama de Trellis
El diagrama de Trellis es un diagrama en forma de red. Cada línea
horizontal corresponde con uno de los estados del codificador. Cada línea vertical
corresponde con uno de los niveles del árbol del código. Se Parte del estado
inicial del codificador en el primer nivel del árbol. A partir de aquí se trazan dos
líneas desde este estado. Una para el caso de que la siguiente entrada fuera un 0
y otra para el caso de que fuera un 1. Estas líneas irán hasta el siguiente nivel del
19 CAPÍTULO II – CODIFICACIÓN DE CANAL
árbol al estado en el que queda el codificador después de haber codificado las
correspondientes entradas. Encima de cada una de estas líneas se escribe la
salida del codificador para esa codificación. Para cada nivel del árbol se hace lo
mismo desde todos los estados en los que el codificador se puede encontrar. En
la Figura 2.6. se muestra el diagrama de trellis, donde A,B,C,D son los niveles del
árbol de código.
Figura 2.6 Diagrama de Trellis.
2.2.3 Decodificación de Códigos Convolucionales
El proceso de decodificación consiste en buscar una trayectoria en el
diagrama de Trellis (o en el árbol del código) donde la secuencia codificada difiera
de la secuencia recibida en unos cuantos números de lugares.
La salida de un codificador convolucional sigue unas secuencias determinadas
que son forzadas por la estructura del codificador esta característica es la que
permite la capacidad correctora en la recepción.
Un método de fuerza bruta de decodificar una secuencia utilizando el principio de
máxima verosimilitud es calcular la distancia entre la secuencia recibida y todas
las posibles secuencias transmitidas, seleccionado entonces la de mínima
distancia. Es decir, si se reciben palabras codificadas de N bits de longitud,
entonces habrá que hacer 2N cálculos de distancia. Esto implica que a medida
que N aumenta se hace impráctica la carga computacional de tal método.
20 CAPÍTULO II – CODIFICACIÓN DE CANAL
Para realizar la decodificación se utiliza el algoritmo denominado Algoritmo de
Viterbi que se basa en el principio de máxima verosimilitud; sin embargo reduce
la carga de código, El fundamento de este algoritmo está en que no se
almacenan todas las secuencias a las que da lugar el codificador.
Se basa en el principio de optimalidad: el mejor camino (menor distancia de
Hamming) a través del diagrama de Trellis que pasa por un determinado nodo,
necesariamente incluye el mejor camino desde el principio del diagrama de Trellis
hasta este nodo. El principio anterior implica que para cada uno de los nodos del
diagrama de Trellis sólo es necesario guardar el mejor camino (secuencia) hasta
ese nodo. De esta forma, como mucho se tendrán tantos caminos como estados
diferentes.
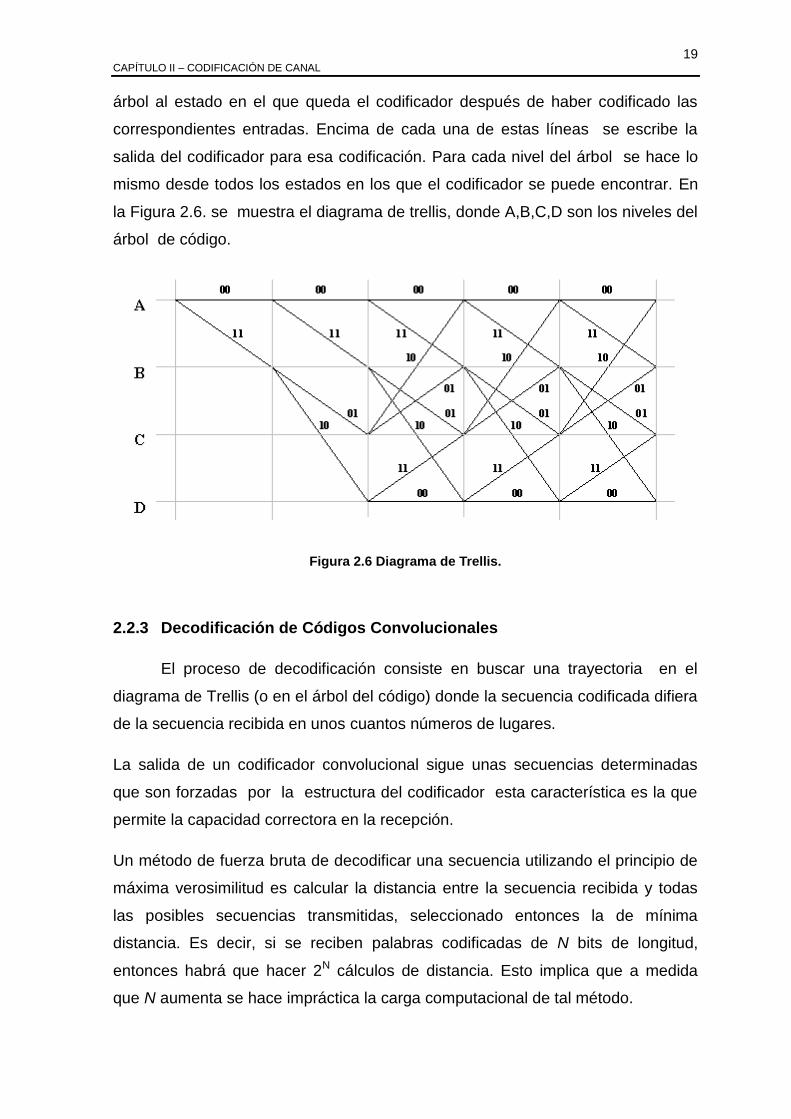
Se pueden tomar dos tipos de decisiones al momento de la decodificación duras
(Hard-Decision) oblandas (Soft-Decision).
En un sistema de tipo Hard-Decision, primero se decide sobre el dato recibido de
forma individual para cada bit, y posteriormente se evalúa la métrica. En cambio
en los sistemas soft-decision no se realiza la detección independiente de cada
símbolo, sino que se realiza la estimación sobre toda la secuencia completa de
datos recibidos. La Figura 2.7 muestra la probabilidad de error en los dos tipos de
sistemas de decodificación.
Figura 2.7 Probabilidad de error Hard y Sotf Decision
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 210
-4
10-3
10-2
10-1
Eb/N
0
Pe
Simulación en Canal AWGN - Código Convolucional
Hard Decision
Soft Decision
21 CAPÍTULO II – CODIFICACIÓN DE CANAL
2.3 Distancia libre de un Código Convolucional
El desempeño de un código convolucional depende no sólo del algoritmo de
decodificación utilizado, sino también de las propiedades de distancia del código.
Por esta razón, la medida simple más importante de la capacidad de un código
convolucional para combatir el ruido del canal es la distancia libre. La distancia
libre de un código convolucional se define como la distancia de Hamimng mínima
entre cualesquiera dos palabras de código en el código.
2.4 Aplicaciones Códigos Convolucionales
La codificación es muy importante para servicios inalámbricos. Debido a que la
propagación de las ondas de radio entre el receptor y la estación base en el medio
aire es muy vulnerable al ruido e interferencia. Si las comunicaciones celulares no
tendrían la redundancia en los bits transmitidos para aumentar la fiabilidad, no
tendrían el éxito que tienen hoy en día. A modo de ejemplo, el primer sistema
celular Digital Advance Mobile Phone Service (D-AMPS) utilizaba códigos
convolucionales de tasa 1/2 (es decir, el doble de la velocidad de los bits de
información) con una longitud de restricción de 6. Las comunicaciones celulares
basadas en CDMA a pesar de tener el espectro ensanchado para luchar contra la
poca fiabilidad de medio aire, utilizan codificación convolucional de tasa 1/2 en el
enlace descendente y 1/3 en el enlace ascendente con una longitud de
restricción de 9.
En la televisión digital los códigos convolucionales son altamente utilizados
debidos a su capacidad de corregir y detectar errores las tasas que se utilizan son
muy variadas dependiendo si aplicación necesita ser robusta o tener una alta
capacidad. En el estándar ISDB-T6 se utiliza códigos convolucionales de tasa 1/2
2/3 3/4 5/6 7/8.
6 Estándar brasileño de Televisión Digital
CAPÍTULO III
3. TECNOLOGIAS PARA IMPLEMENTACIÓN DE SISTEMAS EN
FPGAS
3.1 Introducción a la Tecnología FPGA
Los FPGAs (Field Programmable Gate Arrays), son dispositivos
semiconductores que contienen componentes lógicos programables e
interconexiones programables entre ellos. Los componentes lógicos programables
pueden ser programados para duplicar la funcionalidad de puertas lógicas básicas
tales como AND, OR, XOR, NOT o funciones combinacionales más complejas
tales como decodificadores o simples funciones matemáticas. En muchos FPGA,
estos componentes lógicos programables también incluyen elementos de
memoria, los cuales pueden ser simples flip-flops o bloques de memoria más
complejos. La evolución de los FPGA se ha basado en tres ejes fundamentales. El
tecnológico donde el objetivo principal es utilizar geometrías cada vez más
pequeñas usando transistores más pequeños y rápidos, acompañadas de costes
cada vez menores (por área). El estructural orientado al diseño de sistemas:
generadores de acarreos, memorias y multiplicadores embebidos e
interconexiones jerárquicas además del control de impedancias E/S. La
metodología de programación donde se trabaja en disponibilidad de nuevos
módulos sintetizables cada vez más complejos orientándose hacia el diseño
modular y en equipo. [4]
23 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
Una lógica de interconexiones programables permite que los bloques lógicos de
un FPGA, puedan ser interconectados según la necesidad del diseñador de un
sistema. Estos bloques lógicos e interconexiones pueden ser programados
después del proceso de manufactura por el usuario o diseñador, dependiendo de
los recursos del FPGA y así desempeñar cualquier función lógica necesaria.
En la última década la tecnología FPGA ha tenido una gran penetración no solo
para fines académicos, sino también para el desarrollo de tecnologías a un menor
precio y en un tiempo relativamente corto. El mercado de la tecnología FPGA en
el 2008 fue de aproximadamente USD$447 millones y se estima que para el 2012
sea de USD$717 millones. Por esta razón es necesario que en países en vías de
desarrollo realicen estudios que involucren a esta tecnología para poder reducir
un poco la brecha con las grandes potencias y generar propia tecnología.
3.2 Historia de la Tecnología FPGA
La necesidad de desarrollar y diseñar nueva tecnología dio lugar a la
creación de circuitos integrados estándar, los cuales permiten el desarrollo
productivo de sistemas relativamente complejos de una forma sencilla,
flexibilizando su reproducibilidad y su mantenimiento. Sin embargo, cuando se
trata de abordar con esta filosofía el diseño de sistemas más complejos, pronto
comienzan a aparecer problemas asociados a la velocidad, el consumo o incluso
a la confidencialidad, ya que si un diseño electrónico se encuentra basado en
dispositivos estándar es presa fácil de todos aquéllos que quieran copiarlo, siendo
esto un enorme inconveniente en un mercado tan competitivo como es el
electrónico. Por estos inconvenientes se dio la necesidad de nuevas formas de
diseño que origino los sistemas microprogramables. En 1969, Busicon (una
joven empresa japonesa) encarga a una pequeña compañía de 10 empleados
llamada Integrated Electronics (conocida hoy como Intel) un chipset para una
computadora. Tratan de utilizar la potencia de la integración con la finalidad de
hacer un micro-computador en un chip y luego ―personalizarlo‖ mediante un
24 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
programa almacenado en memoria. Como resultado surge en Febrero de 1971 el
Intel 4004, ofreciendo a los diseñadores un circuito que permite construir sistemas
lo suficientemente complejos mediante una simple programación, pero que es a la
vez lo bastante estándar como para poder asegurar la flexibilidad y modularidad
comentada anteriormente. Su impacto fue tan grande que pronto los fabricantes
desarrollaron versiones económicas, denominadas microcontroladores, orientados
al desarrollo e implantación de controladores industriales o incluso versiones más
potentes en lo que a habilidades de cálculo se refiere, originando los
denominados DSP (Digital Signal Processor). Sin embargo, una vez más los
requerimientos de diseños cada vez más y más complejos pronto volvieron a
colocar una barrera en lo que a velocidad y prestaciones de estos elementos se
refiere a la hora de desarrollar sistemas que demandasen una elevada velocidad
de trabajo, y la alta confidenciabilidad ofrecida inicialmente pronto se vio que
presentaba sus lagunas.
Por un momento y debido a la autoridad intelectual y económica de los diseños se
pensó en la opción de los dispositivos ASIC (Application Specific Integrated
Circuit) como la única solución viable ante tal problemática. Sin embargo, el
elevado costo de desarrollo asociado a estos sistemas, tanto en esfuerzo de
diseño como de gastos asociados a ingeniería no recurrente, los convertía en una
solución poco atractiva para muchos diseñadores. Fue entonces cuando
partiendo de la idea que tuvo Texas Instruments con las PAL (Programmable
Array Logic) en los 70, al difundir puertas lógicas que se puedan unir con la red de
interconexiones programables, Ross Freman, co-fundador de Xilinx, inventó el
arreglo matricial de compuertas. La raíz histórica de los FPGA son los dispositivos
de lógica programable compleja (CPLD) de mediados de los 1980.
Los Dispositivos CPLD tienen un densidad que va desde miles a decenas de
miles de compuertas lógicas, en su arquitectura tienen una estructura un poco
restringida esto permite una mejor predicción de los tiempos de retraso pero no
tienen la alternativa de flexibilidad que permite cambiar de un diseño a otro. Los
FPGA van típicamente desde decenas de miles hasta muchos millones de
compuertas lógicas. La arquitectura de los FPGAs, son dominadas por las
25 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
interconexiones. Esto los hace más flexibles lo que permite ir más lejos en cuanto
del diseño inicial. Otra notable diferencia entre CPLDs y FPGAs es la presencia
de funciones de más alto nivel (tales como sumadores y multiplicadores) dentro
de los FPGAs, además de memorias. Una diferencia importante es que muchos
FPGAs modernos, soportan una total o parcial re-configuración del sistema,
permitiendo que una parte del diseño sea re-programada mientras las otras partes
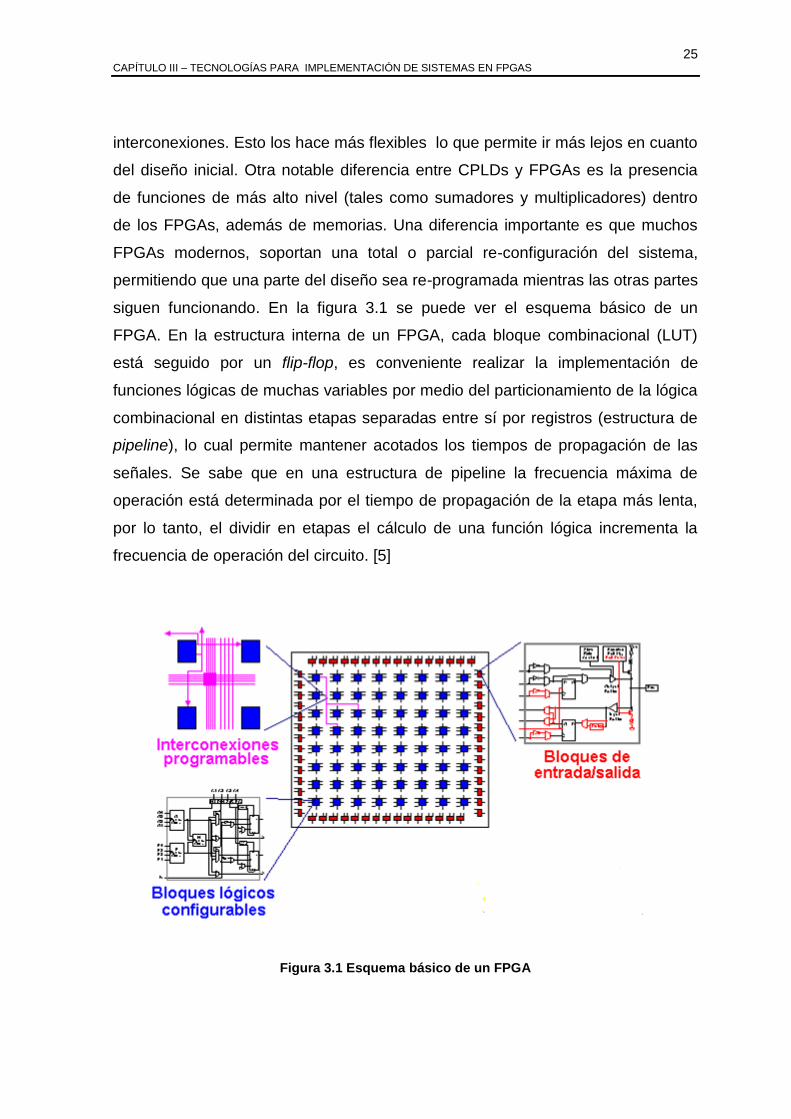
siguen funcionando. En la figura 3.1 se puede ver el esquema básico de un
FPGA. En la estructura interna de un FPGA, cada bloque combinacional (LUT)
está seguido por un flip-flop, es conveniente realizar la implementación de
funciones lógicas de muchas variables por medio del particionamiento de la lógica
combinacional en distintas etapas separadas entre sí por registros (estructura de
pipeline), lo cual permite mantener acotados los tiempos de propagación de las
señales. Se sabe que en una estructura de pipeline la frecuencia máxima de
operación está determinada por el tiempo de propagación de la etapa más lenta,
por lo tanto, el dividir en etapas el cálculo de una función lógica incrementa la
frecuencia de operación del circuito. [5]
Figura 3.1 Esquema básico de un FPGA
26 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
3.3 Arquitectura de un FPGA
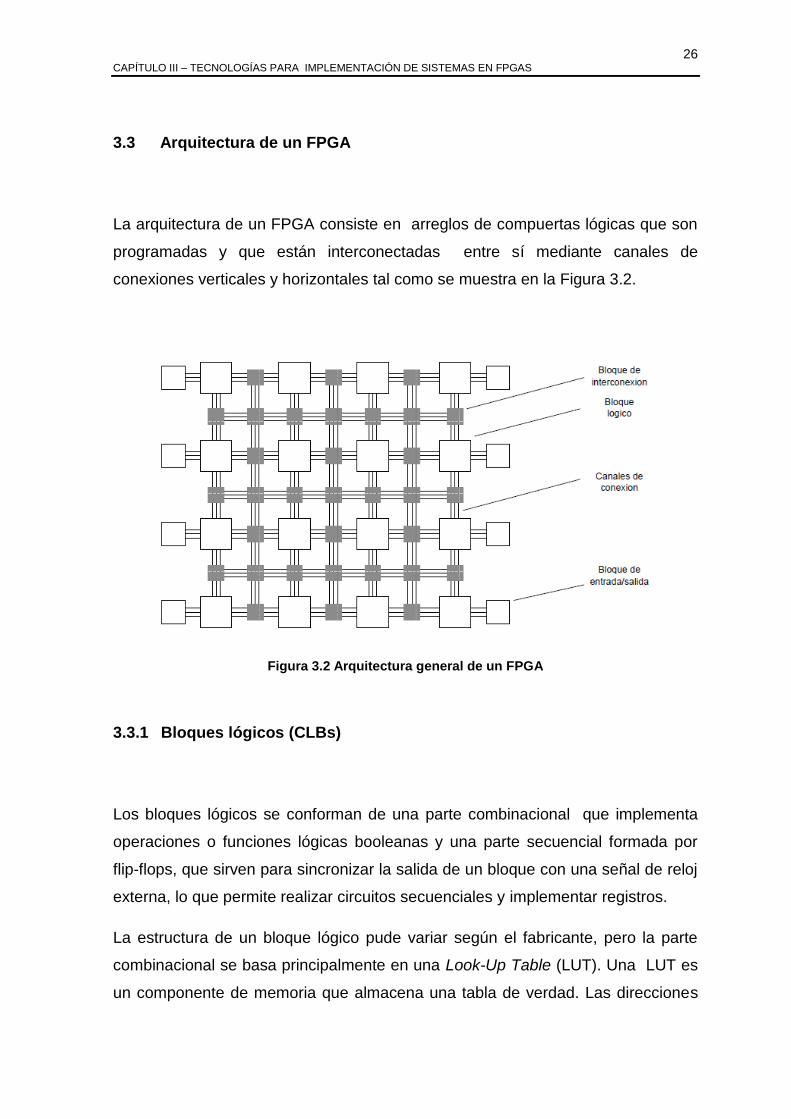
La arquitectura de un FPGA consiste en arreglos de compuertas lógicas que son
programadas y que están interconectadas entre sí mediante canales de
conexiones verticales y horizontales tal como se muestra en la Figura 3.2.
Figura 3.2 Arquitectura general de un FPGA
3.3.1 Bloques lógicos (CLBs)
Los bloques lógicos se conforman de una parte combinacional que implementa
operaciones o funciones lógicas booleanas y una parte secuencial formada por
flip-flops, que sirven para sincronizar la salida de un bloque con una señal de reloj
externa, lo que permite realizar circuitos secuenciales y implementar registros.
La estructura de un bloque lógico pude variar según el fabricante, pero la parte
combinacional se basa principalmente en una Look-Up Table (LUT). Una LUT es
un componente de memoria que almacena una tabla de verdad. Las direcciones

27 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
de la memoria son las entradas de la función lógica que se debe implementar y en
cada celda de la memoria se almacena el resultado de la combinación
correspondiente de las entradas.
Las LUTs de N entradas son básicamente una memoria que, cuando es
programada apropiadamente, puede realizar cualquier función de hasta N bits de
entrada. Un FPGA típico tiene CLBs con una o más LUTs de 4 entradas,
opcionalmente puede contar con flip-flops tipo ―D‖ y con circuitos que implementen
el cálculo de acarreos de forma rápida. Las LUTs permiten que cualquier función
booleana que no exceda el número de entradas pueda ser implementada, por lo
que provee circuitos lógicos genéricos. Los flip-flops pueden ser usados para
realizar un pipeline (técnica para paralelizar un proceso), registros o cualquier otra
función en la que se requiera sincronización. Los circuitos para el cálculo de
acarreos de forma eficiente son recursos especiales que se encuentran en la
celda con la finalidad de acelerar los cálculos que requieran del acarreo. Debido a
que las opciones de interconexión son muy pocas, y debido al poco retraso en los
cálculos, el uso de estos recursos mejora significativamente la velocidad en la
propagación del acarreo. Frecuentemente en los Bloques Lógicos de los
dispositivos más recientes, se incluyen componentes lógicos adicionales (como
por ejemplo compuertas XOR, multiplexores), los cuales permiten que sean
implementadas de manera eficiente una gran variedad de funciones.[6] La Figura
3.3 muestra la estructura de un bloque lógico.
Figura 3.3 Estructura de un bloque lógico
28 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
3.3.2 Tecnologías de Programación
En un FPGA es necesario conocer como se almacena la información
correspondiente a las funciones lógicas y a las conexiones que deben hacerse
entre bloques lógicos que se quiere implementar. Las tecnologías de
programación más comunes son las siguientes:
SRAM (RAM estática):
Este tipo de almacenamiento es muy común en la tecnología FPGA y se
configura en el momento de encendido del circuito que contiene al FPGA. Debido
a que al ser SRAM el contenido de la memoria se pierde cuando se deja de
suministrar energía; la información binaria de las celdas SRAN se almacena en
memorias seriales EEPROM conocidas como memorias de configuración. En el
momento de encendido del circuito, toda la información binaria es transferida a los
bloques e interconexión del FPGA mediante el proceso de configuración. Un
circuito dedicado del FPGA inicializa todos los bits de la SRAM al encender y
configurar los bits con una configuración proporcionada por el usuario. A
diferencia otras tecnologías de programación, el uso de celdas SRAM no requiere
el procesamiento de circuitos integrados especiales más allá del estándar CMOS.
Como resultado, los FPGAs basados en SRAM pueden utilizar la última
tecnología CMOS disponible y, así, se benefician de la mayor integración, las
velocidades más altas y el menor consumo de potencia dinámica. [7]
ANTIFUSE (antifusible):
Este tipo de programación se utiliza para dejar un diseño permanentemente
en un FPGA debido a que solo se le puede programar una vez (One Time
Programed, OTP). A esta tecnología se la denomina así porque a diferencia de
una conexión con un fusible que está establecida, la conexión debe ser creada, es
decir que no existe originalmente y una vez que es programada no se puede
recuperar el estado original de la conexión. Un antifusible consiste en dos líneas
perpendiculares conductoras que comúnmente son de aluminio, separadas por
una capa de dieléctrico que puede ser un oxido. La programación se realiza
29 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
estableciendo una tensión elevada entre las dos líneas que se cruzan. Esta
tensión es superior a la rigidez dieléctrica del oxido y el campo eléctrico lo rompe
estableciendo un pequeño arco entre las dos pistas, que las funde parcialmente,
creando así una conexión permanente.
La principal ventaja de esta tecnología es considerable disminución en su tamaño.
Además tienen menos resistencias y capacitancias parásitas que otras
tecnologías. Estas ventajas permiten incluir más interruptores por dispositivo.
Estos dispositivos son no volátiles. Su costo disminuye debido a que no es
necesaria una memoria para almacenar la información de programación y esto
hace que este tipo de FPGAs puedan ser usados en situaciones que requieren
una operación inmediata después de encender el equipo.
FLASH:
En los últimos años han evolucionado las celdas de memoria flash y ha
sido posible su implementación en los dispositivos programables.Los FPGAs
basados en celdas flash tienen las principales ventajas de las dos técnicas de
programación mencionadas anteriormente. Su tamaño es intermedio entre una
celda SRAM una antifusible; son reprogramables, aunque la velocidad de
programación es bastante más lenta que en el caso de una SRAM; y son no
volátiles es decir que no necesitan de otro dispositivo para guardar la
configuración interna. Otra diferencia con la tecnología SRAM son los buffers de
alta y baja tensión que son necesarios para programar la celda y que contribuyen
para evitar la sobrecarga del área, sin embargo estos generan un costo
relativamente modesto ya que se amortiza a través de numerosos elementos
programables.
Una desventaja de los dispositivos con tecnología de programación flash es que
no pueden ser reprogramados infinitamente. En muchos casos los FPGAs son
programados para una función específica, en ese caso un dispositivo con
tecnología flash es más que suficiente. Otra desventaja importante de dispositivos
flash es la necesidad de un proceso CMOS no estándar. Igualmente que en la
tecnología basada en memoria estática, esta tecnología de programación tiene
30 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
una resistencia relativamente alta debido a la utilización de conmutadores
basados en transistores.
3.3.3 Bloques de Entrada y Salida
La periferia del FPGA está constituida por bloques de entrada y salida
configurables por el usuario cuya función es permitir el paso de una señal hacia
dentro o hacia el exterior del dispositivo.
Cada bloque puede ser configurado independientemente para funcionar como
entrada, salida o bidireccional, admitiendo también la posibilidad de control
triestado. Las entradas o salidas pueden configurarse para trabajar con diferentes
niveles lógicos (TTL, CMOS). Además, cada entrada o salida incluye flip-flops
que pueden utilizarse para registrar tanto las entradas como las salidas.
Los FPGA utilizan cientos hasta miles de terminales de conexión además
funcionan a altas velocidades de operación por este motivo los bloques de
entrada o salida deben ser capaces de proveer una adecuada terminación en
cuanto a términos de impedancia se refiere, de forma de evitar reflexiones de las
señales.
3.3.4 Líneas de Interconexión
Constituyen un conjunto de caminos que permiten conectar las entradas y
salidas de los diferentes bloques. Están constituidas por líneas metálicas de dos
capas que recorren horizontal y verticalmente las filas y columnas existentes entre
los componentes lógicos.
En el proceso de conexión participan elementos como los puntos de
interconexión Programable que son los que permiten que los bloques lógicos y las
entras/salidas del FPGA puedan comunicarse. Otro elemento son las matrices de

31 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
interconexión SW (“Switch Matriz o Magic Box‖) que son dispositivos de
conmutación distribuidos de forma uniforme por el FPGA. En la Figura 3.4. Se
muestra la conexión de una SW [8]
En general, las conexiones internas que pueden realizarse entre los elementos de
un FPGA son las siguientes:
Líneas directas. Tienen lugar entre bloques adyacentes.
Conexiones de propósito general: Se realizan a través de la matriz de
interconexión cuando se desean conectar dos bloques no adyacentes. Su misión
es conectar canales verticales y horizontales que permiten llegar al punto final de
la conexión. Cuanto más larga es la línea de ruteo, mayores serán los retrasos
introducidos tanto por la propia longitud de la línea como por los elementos de
interconexión utilizados a lo largo de la misma.
Líneas largas. Estas conexiones se utilizan cuando una señal debe
recorrer una gran longitud, por ejemplo en la implementación de un bus interno,
de forma tal de evitar que la misma atraviese elementos de interconexión evitando
de esta forma retrasos introducidos por los mismos.
Líneas rápidas. Cuando los bloques lógicos contienen más de una LUT,
las líneas rápidas son las encargadas de realizar las conexiones entre las distintas
LUTs.
Figura 3.4 Matrices de Interconexión
32 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
3.3.5 Recursos internos de los FPGA actuales.
Los FPGA cuentan en su arquitectura con recursos que cumplen funciones
de propósito específico a continuación se nombra a los más importantes.
RAM distribuida
Las LUTS que se basan en celdas SDRAN permiten utilizar estas celdas
como memoria RAM o como registros de desplazamiento. Una LUT de 4 entradas
puede ser utilizada para formar una memoria RAM de 16 x 1 bits. A su vez, las 16
celdas de memoria pueden ser interconectadas en forma de cadena formando un
registro de desplazamiento.
Cadenas de acarreo rápidas
Los FPGAs actuales es que incluyen lógica y elementos de interconexión
útiles para implementar cadenas de acarreo rápidas (fast carry chains) cuya
función es la de propagar de forma rápida señales de acarreo entre dos
elementos lógicos.
Las cadenas de acarreo permiten realizar de forma eficiente sumadores,
multiplicadores, contadores y comparadores de gran velocidad.
RAM embebida
La gran mayoría de dispositivos FPGA incluyen bloques de memoria RAM
además de la RAM distribuida en las LUTs. Estos bloques de memoria pueden ser
configurados de diversas maneras, formando memorias de un solo puerto (single-
port RAMs), memorias de doble puerto (dual-port RAMs), memorias FIFO (first-in
first-out), etc.
Multiplicadores
Algunas funciones lógicas tales como suma y multiplicación son
inherentemente lentas si se realizan interconectando un gran número de bloques
lógicos.
33 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
Para aplicaciones de procesamiento digital de señales, donde es necesario el uso
de varias sumas y multiplicaciones a mayor velocidad (denominadas operación
MAC, Multiply and Accumulate), el hecho de que los FPGAs cuenten con una
cantidad de multiplicadores embebidos los hace ideales para ser utilizados.
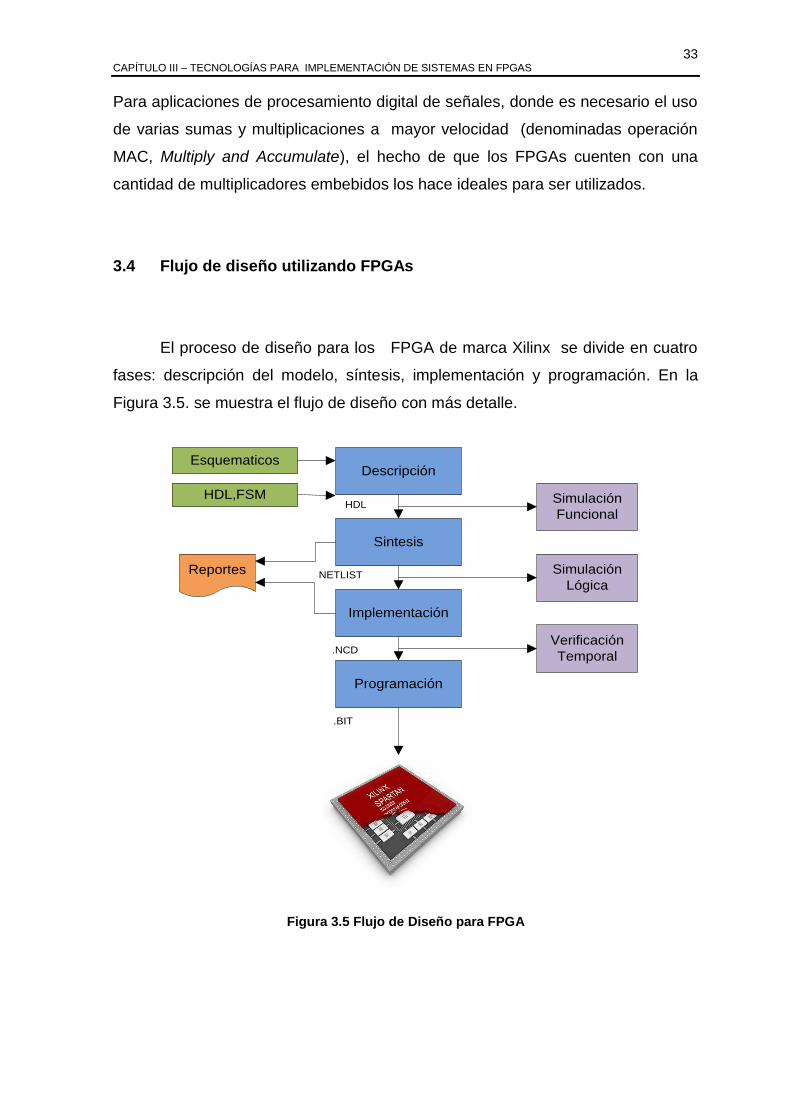
3.4 Flujo de diseño utilizando FPGAs
El proceso de diseño para los FPGA de marca Xilinx se divide en cuatro
fases: descripción del modelo, síntesis, implementación y programación. En la
Figura 3.5. se muestra el flujo de diseño con más detalle.
Esquematicos
HDL,FSM
Descripción
Sintesis
Implementación
Programación
Reportes
HDL
NETLIST
.NCD
.BIT
Simulación
Funcional
Simulación
Lógica
Verificación
Temporal
Figura 3.5 Flujo de Diseño para FPGA
34 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
3.4.1 Descripción del Modelo
La Descripción del modelo consiste en crear un modelo RTL (Register
Transfer Level) que representa un circuito digital como un conjunto de primitivas
(sumadores, contadores, multiplexores, registros, etc.)
Hay dos herramientas básicas para la creación de un diseño RTL: Lenguaje de
descripción de Hardware HDL (“Hardware Description Language”) y lenguaje
Esquemático a continuación se describe cada una de estas.
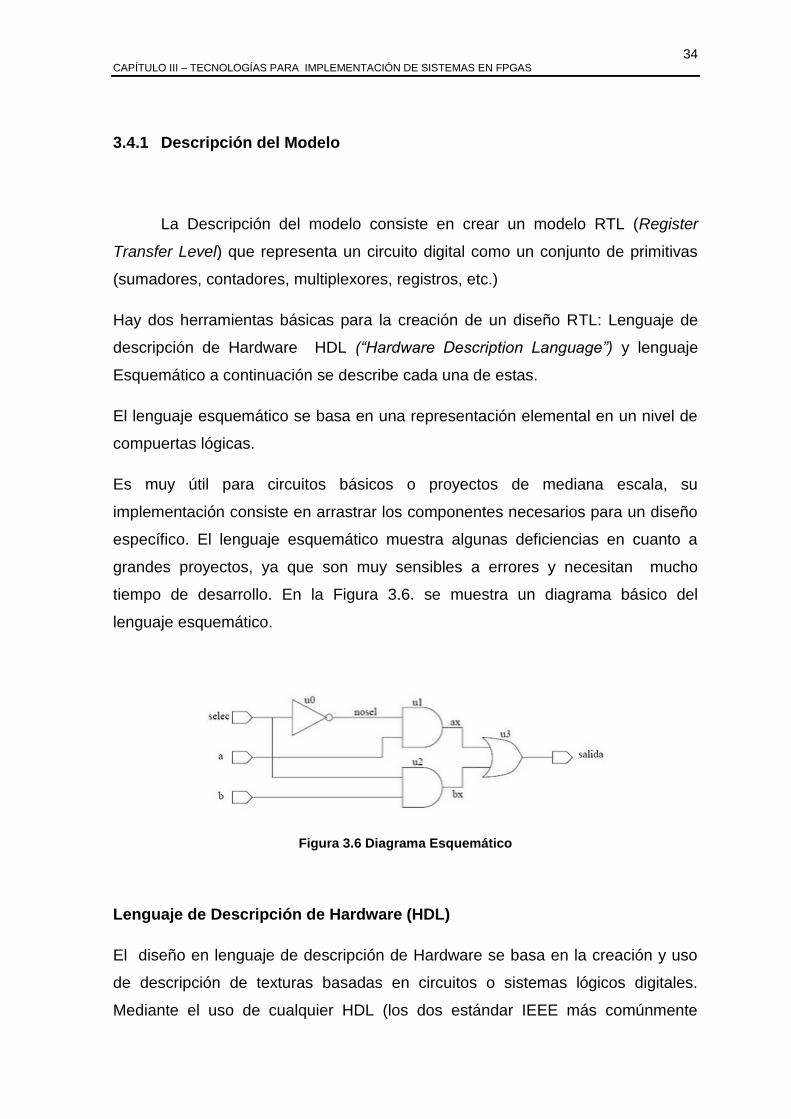
El lenguaje esquemático se basa en una representación elemental en un nivel de
compuertas lógicas.
Es muy útil para circuitos básicos o proyectos de mediana escala, su
implementación consiste en arrastrar los componentes necesarios para un diseño
específico. El lenguaje esquemático muestra algunas deficiencias en cuanto a
grandes proyectos, ya que son muy sensibles a errores y necesitan mucho
tiempo de desarrollo. En la Figura 3.6. se muestra un diagrama básico del
lenguaje esquemático.
Figura 3.6 Diagrama Esquemático
Lenguaje de Descripción de Hardware (HDL)
El diseño en lenguaje de descripción de Hardware se basa en la creación y uso
de descripción de texturas basadas en circuitos o sistemas lógicos digitales.
Mediante el uso de cualquier HDL (los dos estándar IEEE más comúnmente
35 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
usados en la industria y educación son Verilog -HDL y VHDL), la descripción del
circuito puede ser creada en los diferentes niveles de
abstracción, descripción de puertas lógicas básicas de acuerdo con la sintaxis del
lenguaje (el orden gramatical de las palabras y símbolos utilizados en el lenguaje)
y semántica (el significado de las palabras y símbolos utilizados en el lenguaje).
Circuitos hardware o diseños de sistemas creados usando HDL se genera en
diferentes niveles de abstracción. Comenzando en el nivel más alto (es decir,
más alejado de los detalles del circuito), la idea o el concepto del sistema es la
descripción inicial de alto nivel del diseño que proporciona la especificación del
diseño. El nivel de algoritmo describe el comportamiento del diseño en
términos matemáticos. Ni la idea de sistema, ni el algoritmo describe cómo será
el comportamiento del diseño implementado. La estructura del algoritmo en
hardware es descrito por la arquitectura, que identifica los bloques funcionales de
alto nivel que se usan y como las funciones son conectadas. Los niveles de
arquitectura y algoritmo describen el comportamiento del diseño para ser
verificado en simulación.
El siguiente nivel por debajo de la arquitectura es el nivel de registro de
trasferencia (RTL), que describe el almacenamiento (en los registros) y el flujo de
datos en torno a un diseño, junto con las operaciones lógicas realizadas con los
datos. Este nivel es utilizado generalmente por las herramientas de síntesis que
describen la estructura del diseño (la lista de red del diseño en términos de las
compuertas lógicas y el cableado de interconexión entre las mismas).
En el diseño con HDL, el diseñador elige el lenguaje a utilizar y en qué nivel de
abstracción de diseño trabajar. Al elegir el lenguaje, los siguientes aspectos
deben ser considerados:
La disponibilidad de instrumentos adecuados para la automatización de
diseño electrónico (EDA) para apoyar el uso del lenguaje (incluida la
capacidad de gestión del diseño y la disponibilidad de uso de herramientas
dentro de un proyecto).
Conocimiento previo.
Preferencias personales.
Disponibilidad de modelos de simulación.
36 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
Capacidad de síntesis.
Cuestiones comerciales.
La reutilización de diseños.
Requisitos para aprender un nuevo lenguaje y las capacidades del
lenguaje.
Acceso a herramientas de soporte para el lenguaje, tales como la
existencia de herramientas de comprobación de código y herramientas que
generen documentación.
VHDL
Very high-speed integrated circuit hardware description language—VHSIC
HDL o VHDL surgió en 1980 bajo el departamento de defensa de los Estados
Unidos de los requisitos para el diseño de circuitos digitales con una metodología
de diseño común, proporcionando la capacidad para la auto-documentación y
reutilización con nuevas tecnologías. El desarrollo de VHDL comenzó en 1983 y
se convirtió en un estándar IEEE en 1987. El lenguaje fue revisado en 1993,2000
y 2002. VHDL también tiene una serie de estándares relativamente asociados a la
modelización y a la síntesis.
El código HDL está contenido en un archivo de texto ASCII y por lo tanto es
transportable entre herramientas EDA de un mismo sistema operativo, entre
computadoras, entre diferentes versiones de herramientas EDA y entre diferentes
ingenieros con un equipo de diseño en particular.
El lenguaje VHDL está diseñado para satisfacer determinadas necesidades en el
proceso de diseñó:
1. Permite la descripción de la estructura del diseñó, lo que representa la
manera en que está dividida en sub-diseños, y cómo esos sub-diseños son
interconectados.
2. Permite que las funciones sean especificadas mediante el uso de
estructuras de lenguajes de programación que son familiares a los
desarrolladores.
37 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
3. Como resultado, es posible realizar la simulación del diseñó antes de ser
fabricado, por lo que los diseñadores son capaces de comparar las
alternativas y probar que sean correctos sin el retraso y el costo del
desarrollo de prototipos de hardware.
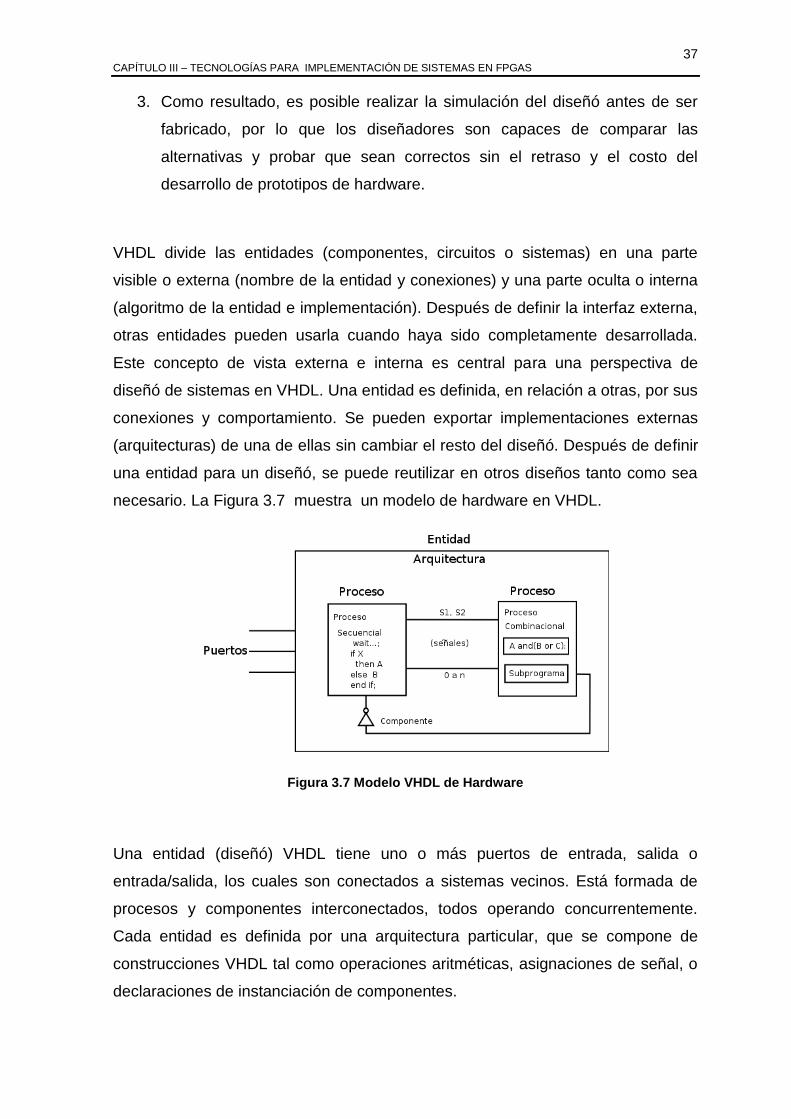
VHDL divide las entidades (componentes, circuitos o sistemas) en una parte
visible o externa (nombre de la entidad y conexiones) y una parte oculta o interna
(algoritmo de la entidad e implementación). Después de definir la interfaz externa,
otras entidades pueden usarla cuando haya sido completamente desarrollada.
Este concepto de vista externa e interna es central para una perspectiva de
diseñó de sistemas en VHDL. Una entidad es definida, en relación a otras, por sus
conexiones y comportamiento. Se pueden exportar implementaciones externas
(arquitecturas) de una de ellas sin cambiar el resto del diseñó. Después de definir
una entidad para un diseñó, se puede reutilizar en otros diseños tanto como sea
necesario. La Figura 3.7 muestra un modelo de hardware en VHDL.
Figura 3.7 Modelo VHDL de Hardware
Una entidad (diseñó) VHDL tiene uno o más puertos de entrada, salida o
entrada/salida, los cuales son conectados a sistemas vecinos. Está formada de
procesos y componentes interconectados, todos operando concurrentemente.
Cada entidad es definida por una arquitectura particular, que se compone de
construcciones VHDL tal como operaciones aritméticas, asignaciones de señal, o
declaraciones de instanciación de componentes.
38 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
En VHDL, los circuitos de modelo secuencial en procesos independientes
(síncronos), usan flip-flops y latches, y los circuitos combinacionales (asíncronos)
utilizan típicamente compuertas lógicas. Los procesos pueden definir y llamar
(instanciar) subprogramas (diseños secundarios). Los procesos se comunican con
cada uno de los otros procesos mediante señales. Una señal tiene una fuente
(manejador), uno o más destinos (receptores), y un tipo definido por el usuario.
Las construcciones del lenguaje VHDL están divididas en tres categorías de
acuerdo a su nivel de abstracción:
Una descripción estructural, que describe la estructura del circuito mediante
compuertas lógicas y el cableado de interconexión entre las mismas que
forman la lista de conexiones del circuito.
Una descripción de flujo de datos, que describe la transferencia de datos
desde la entrada a la salida y entre las señales. Una operación es definida
en términos de una colección de transformación de datos, expresado como
una sentencia concurrente.
Una descripción de comportamiento, que describe el comportamiento del
diseño en términos del comportamiento de circuitos y sistemas utilizando
algoritmos. Esta descripción de alto nivel utiliza construcciones del lenguaje
que se asemejan a una programación de alto nivel de cualquier otro
lenguaje.
Tanto como la descripción de flujo de datos como la de comportamiento utiliza
construcciones de lenguaje similares, pero en VHDL son diferentes: una
descripción de comportamiento utiliza la sentencia process para inicializar un
algoritmo, mientras que una descripción de flujo de datos no lo hace.
39 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
VERILOG –HDL
Verilog –HDL fue lanzado en 1983 por Gateway Design System
Corporation, junto con un simulador de Verilog-HDL. En 1985, el lenguaje y el
simulador fueron mejorados con la introducción del simulador Verilog-XL. En
1989, Cadance Design Systems,Inc. compró Gateway Design System
Corporation, y a principios de los 90, Verilog-HDL y Verilog - XL fueron separados
en dos productos. Verilog-HDL, hasta entonces un lenguaje propio de la empresa,
fue publicado para el dominio público para facilitar la difusión de conocimientos
relacionados con Verilog-HDL y permitir Verilog-HDL competir con VHDL, que ya
existía como un lenguaje abierto. En 1990, Open Verilog International (OVI) fue
formado como un consorcio industrial formado por ingeniería asistida por
ordenador (CAE), vendedores y usuarios Verilog HDL-para controlar la
especificación del lenguaje. En 1995, Verilog-HDL fue revisado y adoptado como
el estándar IEEE 1364. En 2001, el estándar fue revisado, la última versión del
estándar es IEEE Std 1364-2001. [9]
Verilog-HDL es un lenguaje que nació ante la necesidad de mejorar el flujo de
diseño y por tanto es un lenguaje que cubre todas las necesidades de diseño y
simulación. El resultado es un lenguaje simple y flexible que es fácil de aprender
aunque tiene ciertas limitaciones para algunos diseños. Las construcciones del
lenguaje Verilog-HDL son similares a las de VHDL ya que las categorías de
acuerdo al nivel de abstracción son en general para HDL.
Como se muestra en la Figura 3.5 una vez terminada la descripción del circuito,
se procede mediante el uso de un simulador, a realizar la simulación funcional del
circuito depurando posibles errores en la descripción del mismo. En esta fase de
diseño se verifica el comportamiento del circuito. Generalmente, las herramientas
de simulación permiten realizar la verificación del diseño en base a comprobación
automática de las respuestas del circuito en base a estímulos de entrada
conocidos.
40 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
3.4.2 Síntesis del Modelo
En la síntesis se convierte la descripción de alto nivel que tiene el circuito a
un nivel bajo de abstracción usando componentes contenidos en una biblioteca.
Para comprobar los resultados de la síntesis es preciso realizar una simulación
funcional (retardos unitarios) a nivel de puertas. El procedimiento a seguir es
similar a la simulación funcional RTL.
3.4.3 Implementación del Modelo
En la implementación del modelo se realizan algunos procesos primero se
crea un único fichero de salida. El formato de este fichero de salida se denomina:
NGD (Native Generic Design) y contiene componentes lógicos: puertas lógicas,
biestables, RAMs, etc. A continuación se mapean los componentes lógicos en los
componentes físicos de que dispone la FPGA: tablas LUT, biestables, buffers
triestado, etc. Además se encapsulan estos componentes físicos en bloques
configurables (CLBs e IOBs), creando un fichero de salida en formato NCD
(Native Circuit Design). Para finalizar se pasa a realizar el posicionamiento e
interconexión de los bloques configurables en el FPGA y se genera un fichero de
lista de conexiones en formato NCD.
3.4.4 Análisis de Tiempos
Una vez implementado físicamente el diseño, se procede a analizar los tiempos y
velocidades de operación del mismo. Si los tiempos y velocidades no
corresponden con los especificados en la etapa de descripción del diseño, deberá
modificarse la descripción del circuito a fin de ajustar los mismos. Después de
realizar estas fases se obtiene la información para realizar simulaciones
temporales del diseño completo y se puede crear un archivo HDL estructural con
base en los componentes físicos de la FPGA y un fichero SDF (Standart Delay
Format) con los retardos internos del FPGA. Utilizando estos ficheros se puede
41 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
realizar la verificación del diseño final mediante una simulación temporal HDL
post-síntesis.
3.4.5 Puesta en Producción
Por último, una vez satisfechos todos los objetivos del diseño, se procede a
generar el fichero BIT de configuración de la FPGA.
3.5 Herramientas de Implementación
Existen varias herramientas EDA (Automatización de Diseño Electrónico) que
facilitan y aceleran el proceso de implementación de diseños. Estas herramientas
son provistas por los fabricantes de FPGA e incluyen funciones lógicas
optimizadas para sus dispositivos, además de simuladores.
XILINX es una empresa que se ha dedicado a la creación de herramientas EDA
para facilitar el diseño, implementación y programación de los FPGA con la
limitante que estas herramientas están orientadas hacia dispositivos FPGA de
esta marca por lo que no son útiles para otras plataformas, esto hace que el flujo
de diseño sea poco flexible. Durante el proceso se crean y se utilizan archivos con
formatos propietarios de Xilinx, lo cual impide se puedan utilizar en otro tipo de
herramientas o aplicaciones. En la Tabla 3.1 se muestra los diferentes paquetes
y herramientas de diseño que ofrece Xilinx.
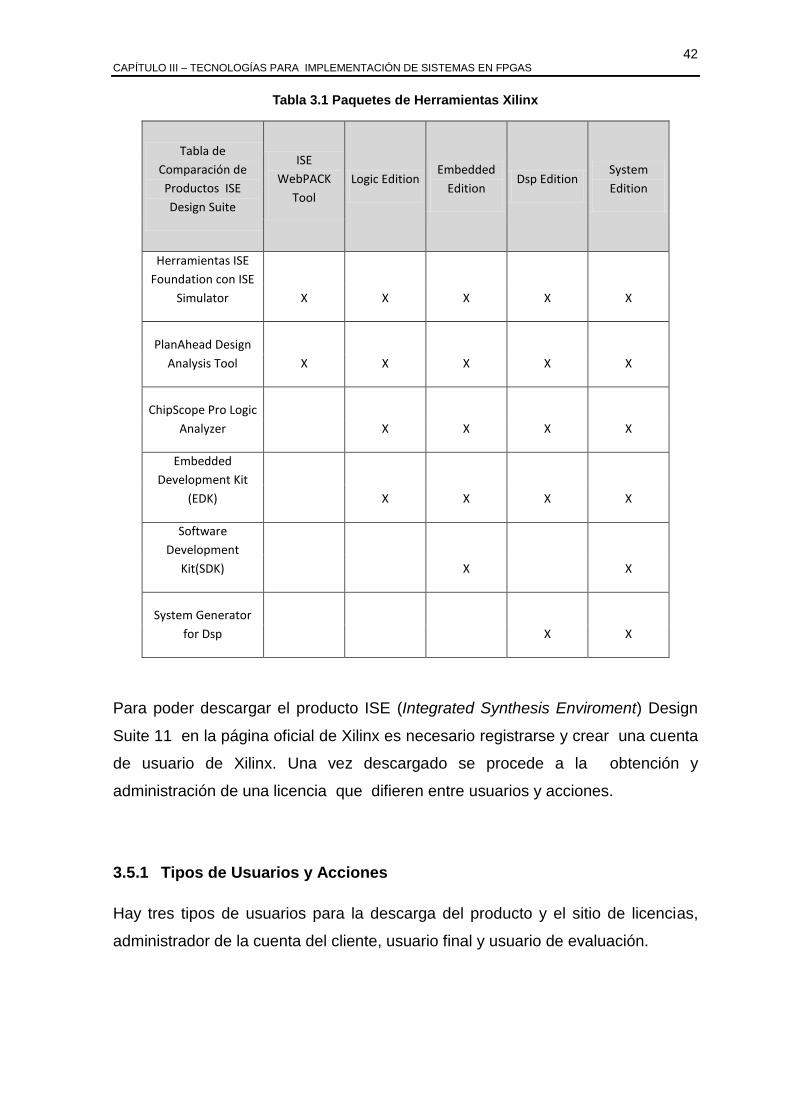
42 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
Tabla 3.1 Paquetes de Herramientas Xilinx
Tabla de
Comparación de
Productos ISE
Design Suite
ISE
WebPACK
Tool
Logic Edition Embedded
Edition Dsp Edition
System
Edition
Herramientas ISE
Foundation con ISE
Simulator X X X X X
PlanAhead Design
Analysis Tool X X X X X
ChipScope Pro Logic
Analyzer X X X X
Embedded
Development Kit
(EDK) X X X X
Software
Development
Kit(SDK) X X
System Generator
for Dsp X X
Para poder descargar el producto ISE (Integrated Synthesis Enviroment) Design
Suite 11 en la página oficial de Xilinx es necesario registrarse y crear una cuenta
de usuario de Xilinx. Una vez descargado se procede a la obtención y
administración de una licencia que difieren entre usuarios y acciones.
3.5.1 Tipos de Usuarios y Acciones
Hay tres tipos de usuarios para la descarga del producto y el sitio de licencias,
administrador de la cuenta del cliente, usuario final y usuario de evaluación.
43 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
Administrador de la cuenta del cliente
Un ejemplo de un administrador de la cuenta del cliente típico es un administrador
de herramientas CAD (Computer Aided Design). Cada cuenta de licencia de
productos debe tener al menos un administrador de la cuenta del cliente. Un
administrador de cuenta de cliente puede gestionar más de una cuenta de licencia
de productos.
Las responsabilidades como administrador de la cuenta del cliente incluyen:
Generación de nodo bloqueado o licencias flotantes para el software de
Xilinx y productos de propiedad intelectual.
Agregar y quitar usuarios de la cuenta de concesión de licencias de
productos.
Asignación de privilegios administrativos a otros usuarios.
Solicitud de DVD del producto.
Usuario final
Adición de usuarios finales a una cuenta de licencia de productos permite a un
ingeniero o un miembro del equipo de diseño la flexibilidad necesaria para
gestionar y generar las claves de licencia por su propia cuenta. El usuario final
puede generar las claves de licencia de productos de nodo bloqueado, derechos
dentro de la cuenta. El usuario final también puede generar claves de licencia
para software de evaluación y la evaluación de los productos de propiedad
intelectual sin recargo. El usuario Final tiene algunas restricciones.
Un usuario final no es capaz de generar claves de licencia flotantes. Sólo
los administradores de cuentas de los clientes puede generar claves de
licencia basada en un servidor (flotante).
El usuario final no es capaz de ver las claves de licencia generados por
otros usuarios.
El usuario final no es capaz de agregar o quitar a otros usuarios o de la
cuenta de concesión de licencias de productos.
44 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
Usuario de Evaluación
El usuario de Evaluación se aquel que pone a prueba por un tiempo límite el
software la unidad de disco ISE Design Suite 11. Los usuarios de evaluación
pueden:
Generar una clave de 30 días de licencia gratuita de evaluación de ISE
Design Suite 11: System Edition
Generar las claves de licencia para la evaluación y no hay recarga en
productos de propiedad intelectual.
Solicitar un DVD ISE Design Suite 11. Los usuarios de evaluación deben
pagar por el envío de los DVD.
3.5.2 Herramientas Xilinx
Integrated Synthesis Enviroment (ISE) es una herramienta EDA de la compañía
Xilinx para la síntesis de las aplicaciones de sistemas embebidos en un FPGA.
Xilinx proporciona herramientas EDA con licencia (ISE FOUNDATION) y sin
licencia (ISE WebPACK), que tienen la misma funcionalidad pero obviamente la
herramienta con licencia tiene mayores ventajas y facilidades.
El entorno de diseño Xilinx ISE incluye todas las etapas necesarias como son:
La entrada de diseño, bien a través de captura esquemática, lenguajes de
descripción hardware como VHDL o Verilog-HDL o representación gráfica
de diagramas de estado.
Herramientas de Verificación para la obtención de una simulación del
sistema, tanto a nivel funcional como estimación de retardos.
Herramientas de implementación.
Herramientas de Programación.
El entorno de ISE permite combinar las diferentes técnicas de diseño para facilitar
la labor de descripción del diseño. Además, se permite la inclusión de
restricciones para optimizar el proceso de implementación y adaptarlo a las
necesidades del diseño.
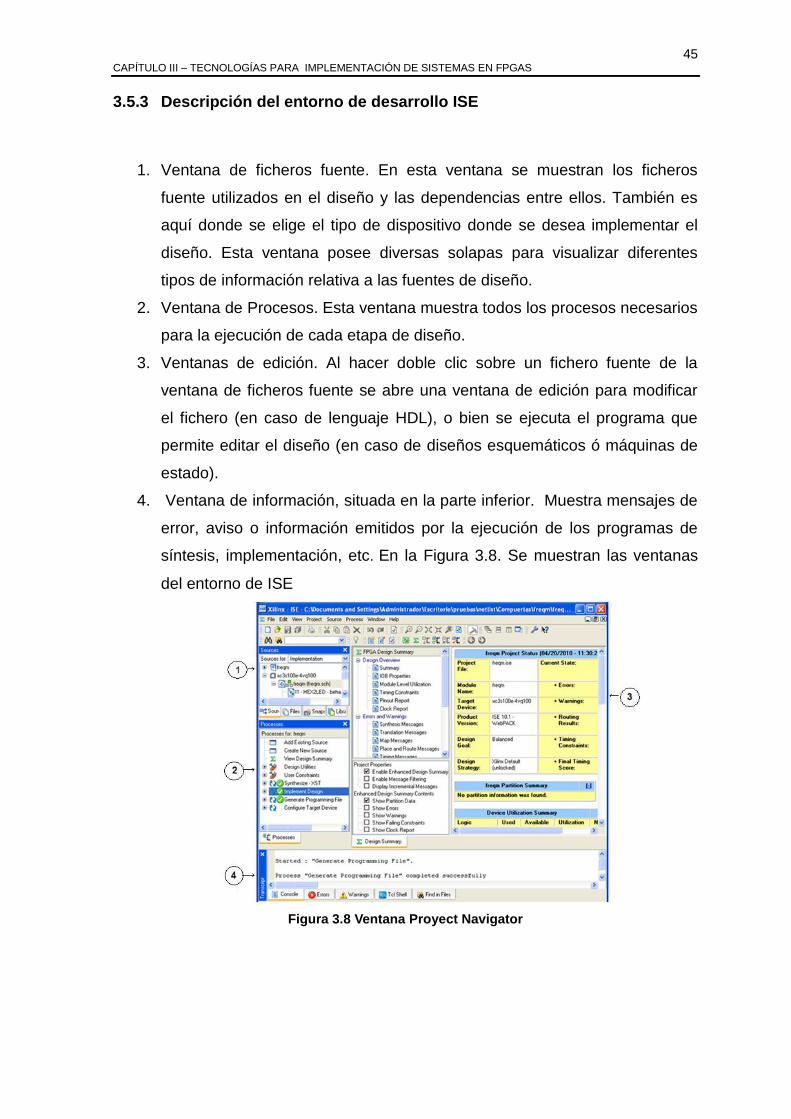
45 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
3.5.3 Descripción del entorno de desarrollo ISE
1. Ventana de ficheros fuente. En esta ventana se muestran los ficheros
fuente utilizados en el diseño y las dependencias entre ellos. También es
aquí donde se elige el tipo de dispositivo donde se desea implementar el
diseño. Esta ventana posee diversas solapas para visualizar diferentes
tipos de información relativa a las fuentes de diseño.
2. Ventana de Procesos. Esta ventana muestra todos los procesos necesarios
para la ejecución de cada etapa de diseño.
3. Ventanas de edición. Al hacer doble clic sobre un fichero fuente de la
ventana de ficheros fuente se abre una ventana de edición para modificar
el fichero (en caso de lenguaje HDL), o bien se ejecuta el programa que
permite editar el diseño (en caso de diseños esquemáticos ó máquinas de
estado).
4. Ventana de información, situada en la parte inferior. Muestra mensajes de
error, aviso o información emitidos por la ejecución de los programas de
síntesis, implementación, etc. En la Figura 3.8. Se muestran las ventanas
del entorno de ISE
Figura 3.8 Ventana Proyect Navigator
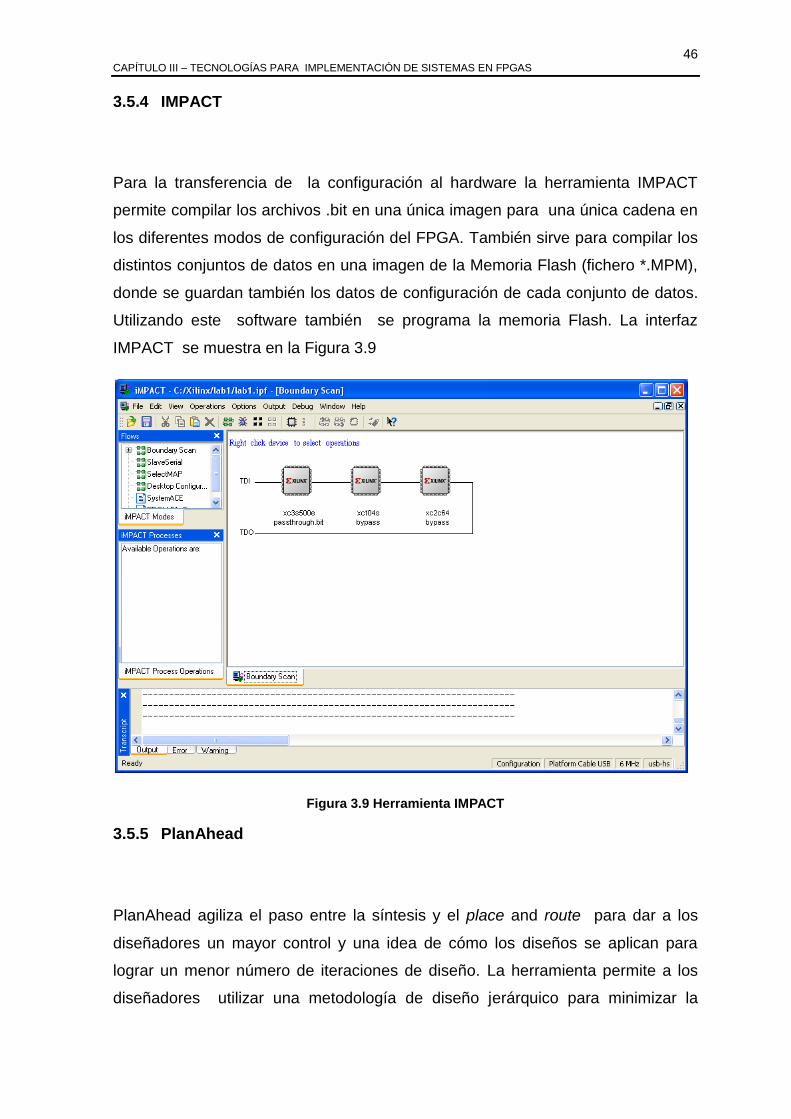
46 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
3.5.4 IMPACT
Para la transferencia de la configuración al hardware la herramienta IMPACT
permite compilar los archivos .bit en una única imagen para una única cadena en
los diferentes modos de configuración del FPGA. También sirve para compilar los
distintos conjuntos de datos en una imagen de la Memoria Flash (fichero *.MPM),
donde se guardan también los datos de configuración de cada conjunto de datos.
Utilizando este software también se programa la memoria Flash. La interfaz
IMPACT se muestra en la Figura 3.9
Figura 3.9 Herramienta IMPACT
3.5.5 PlanAhead
PlanAhead agiliza el paso entre la síntesis y el place and route para dar a los
diseñadores un mayor control y una idea de cómo los diseños se aplican para
lograr un menor número de iteraciones de diseño. La herramienta permite a los
diseñadores utilizar una metodología de diseño jerárquico para minimizar la
47 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
congestión de enrutamiento, simplificar la sincronización y la complejidad de la
interconexión, y explorar las opciones de aplicación. Con el software PlanAhead,
se puede ver los resultados de la aplicación y el momento de analizar fácilmente
la lógica crítica, y tomar decisiones dirigidas a mejorar el rendimiento de diseño
con floorplanning, la modificación de la restricción, y múltiples opciones de la
herramienta de implementación.
3.5.6 Xilinx ChipScope Pro
ChipScope Pro está desarrollado por Xilinx, y permite verificaciones en tiempo
real para las FPGAs insertando unos núcleos de debug software de bajo perfil en
el diseño. Una vez esos núcleos (o cores) han sido colocados y ruteados permiten
al usuario capturar señales de datos en el chip, en tiempo real. Los datos
capturados son enviados fuera del chip para un análisis por algunos de los cables
permitidos. La herramienta ChipScopePro consta de tres componentes: el
Insertador de Núcleos (Core Inserter), el Generador de Núcleos (Core Generator),
y el Analizador ChipScope Pro (ChipScope Pro Analyzer) que se describen a
continuación:
ChipScope Pro Core Generator: Es una interfaz gráfica que permite insertar
los cores directamente en el diseño. Se especifica qué señales se van a
monitorizar, y luego se procede a hacer el place & route del diseño
normalmente.
ChipScope Pro Core Inserter: Inserta automáticamente los cores en el
diseño sintetizado del usuario. Esto es bueno para diseños que ya han sido
completados o para aquellos usuarios que quieran mantener un mayor
control sobre el flujo del diseño.
ChipScope Pro Analyzer: Proporciona configuración para el dispositivo, un
setup del disparo, y una muestra de la traza para los cores. Los cores
proporcionan el trigger, control y capacidad decaptura de la traza.[10]
En la Figura 3.10 se muestra un diagrama de bloques del sistema de conexión
de la herramienta ChipScope.
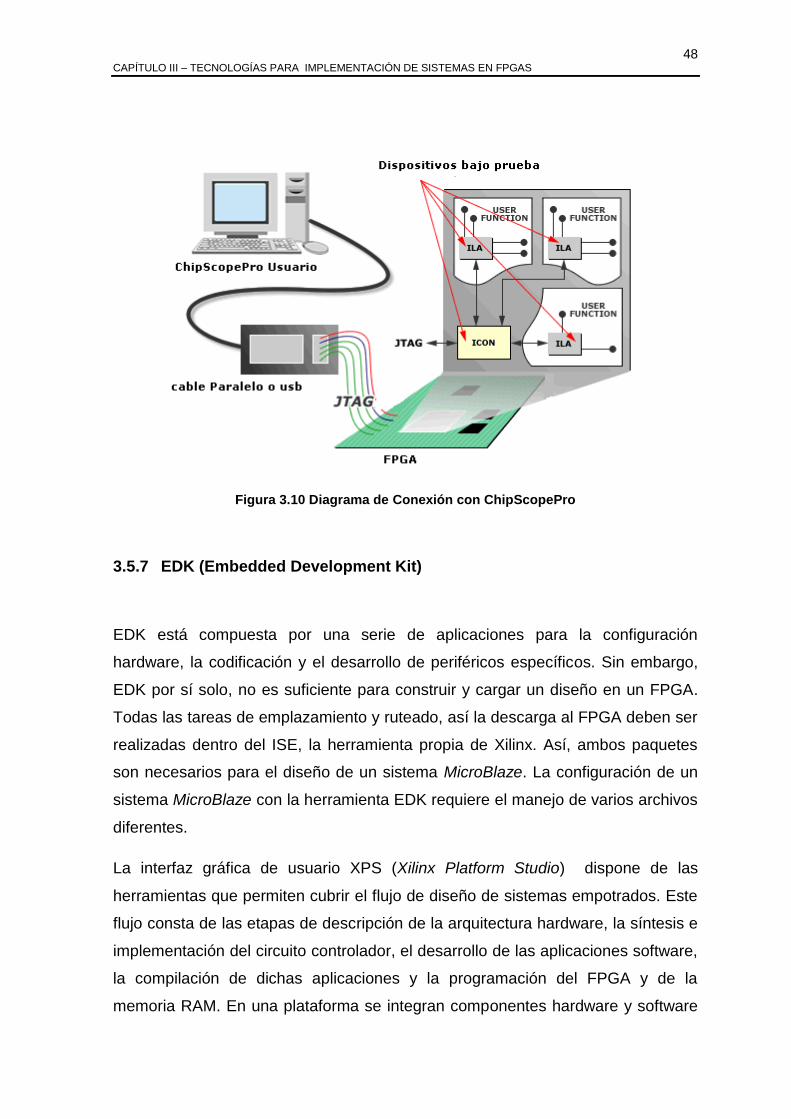
48 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
Figura 3.10 Diagrama de Conexión con ChipScopePro
3.5.7 EDK (Embedded Development Kit)
EDK está compuesta por una serie de aplicaciones para la configuración
hardware, la codificación y el desarrollo de periféricos específicos. Sin embargo,
EDK por sí solo, no es suficiente para construir y cargar un diseño en un FPGA.
Todas las tareas de emplazamiento y ruteado, así la descarga al FPGA deben ser
realizadas dentro del ISE, la herramienta propia de Xilinx. Así, ambos paquetes
son necesarios para el diseño de un sistema MicroBlaze. La configuración de un
sistema MicroBlaze con la herramienta EDK requiere el manejo de varios archivos
diferentes.
La interfaz gráfica de usuario XPS (Xilinx Platform Studio) dispone de las
herramientas que permiten cubrir el flujo de diseño de sistemas empotrados. Este
flujo consta de las etapas de descripción de la arquitectura hardware, la síntesis e
implementación del circuito controlador, el desarrollo de las aplicaciones software,
la compilación de dichas aplicaciones y la programación del FPGA y de la
memoria RAM. En una plataforma se integran componentes hardware y software
49 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
como periféricos (módulos de propiedad intelectual), según los requerimientos de
la aplicación deseada. Existen controladores de memoria, interfaces de
comunicaciones (incluso de alta velocidad como Fast Ethernet), generadores de
señal de reloj, módulos de verificación y depuración, etc. Estos componentes se
interconectan a través de sus señales de entrada-salida y de buses
fundamentalmente, son altamente configurables presentando una cantidad
considerable de parámetros para flexibilizar su operación. Existen drivers
(manejadores) para estos componentes que incluyen funciones mediante las
cuales el desarrollador puede configurar e interactuar con los mismos.
3.5.8 SDK (Software Development Kit)
Xilinx Software Development Kit (SDK) está basado en el estándar de código
abierto Eclipse. SDK se incluye en el ISE Suite Design: Embedded Edition, pero
también está disponible como producto independiente. SDK es el entorno de
desarrollo recomendado para proyectos de aplicaciones de software dirigidas a
Xilinx integrados PowerPC y los procesadores MicroBlaze. SDK proporciona un
entorno para la creación de plataformas de software y aplicaciones específicas
para los procesadores embebidos Xilinx. SDK trabaja con diseños de hardware
creado con XPS incorporado herramientas de desarrollo. Un nuevo proyecto de
asistente guía al usuario a través de la creación de sus proyectos de software,
incluyendo la importación del diseño de hardware y la generación de la Board
Support Package (BSP).
3.6 System Generator
System Generator para DSP es una plataforma software que usa las herramientas
de The MathWorkMATLAB/Simulink para representar una visión abstracta de alto
nivel del sistema de DSP, y que automáticamente genera el código HDL de la
función de DSP desarrollada usando los más optimizados LogiCOREs de Xilinx.
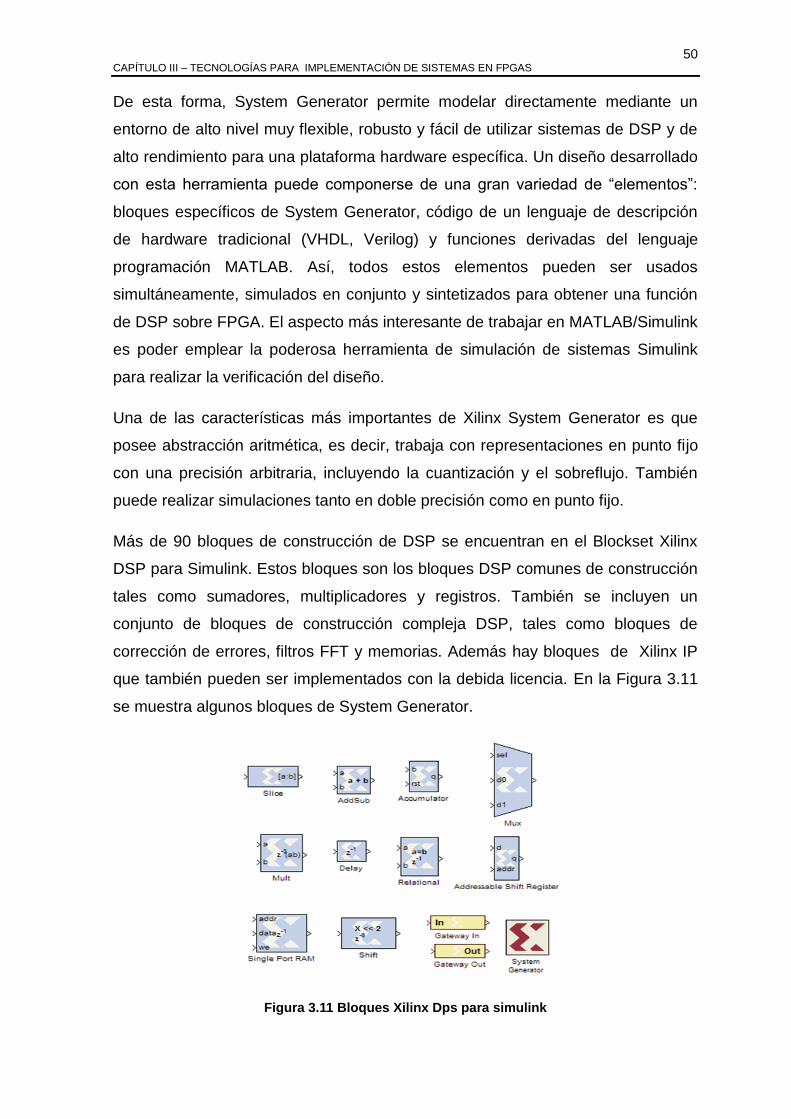
50 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
De esta forma, System Generator permite modelar directamente mediante un
entorno de alto nivel muy flexible, robusto y fácil de utilizar sistemas de DSP y de
alto rendimiento para una plataforma hardware específica. Un diseño desarrollado
con esta herramienta puede componerse de una gran variedad de ―elementos‖:
bloques específicos de System Generator, código de un lenguaje de descripción
de hardware tradicional (VHDL, Verilog) y funciones derivadas del lenguaje
programación MATLAB. Así, todos estos elementos pueden ser usados
simultáneamente, simulados en conjunto y sintetizados para obtener una función
de DSP sobre FPGA. El aspecto más interesante de trabajar en MATLAB/Simulink
es poder emplear la poderosa herramienta de simulación de sistemas Simulink
para realizar la verificación del diseño.
Una de las características más importantes de Xilinx System Generator es que
posee abstracción aritmética, es decir, trabaja con representaciones en punto fijo
con una precisión arbitraria, incluyendo la cuantización y el sobreflujo. También
puede realizar simulaciones tanto en doble precisión como en punto fijo.
Más de 90 bloques de construcción de DSP se encuentran en el Blockset Xilinx
DSP para Simulink. Estos bloques son los bloques DSP comunes de construcción
tales como sumadores, multiplicadores y registros. También se incluyen un
conjunto de bloques de construcción compleja DSP, tales como bloques de
corrección de errores, filtros FFT y memorias. Además hay bloques de Xilinx IP
que también pueden ser implementados con la debida licencia. En la Figura 3.11
se muestra algunos bloques de System Generator.
Figura 3.11 Bloques Xilinx Dps para simulink
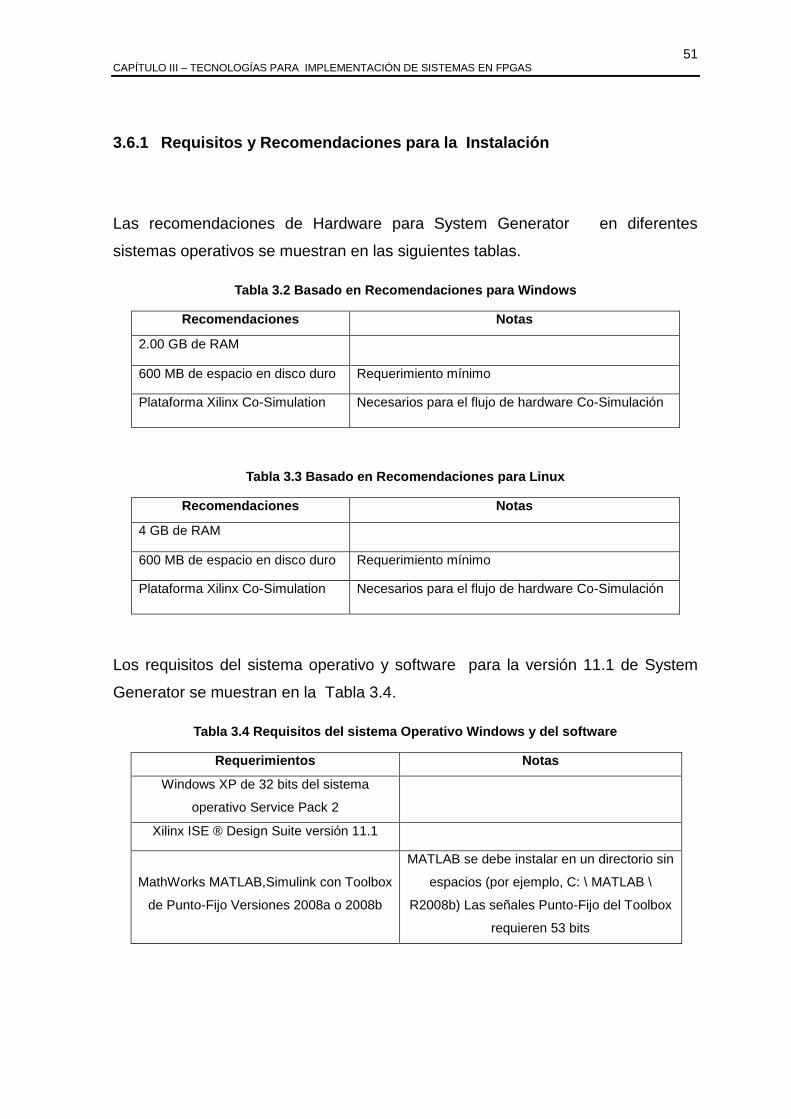
51 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
3.6.1 Requisitos y Recomendaciones para la Instalación
Las recomendaciones de Hardware para System Generator en diferentes
sistemas operativos se muestran en las siguientes tablas.
Tabla 3.2 Basado en Recomendaciones para Windows
Recomendaciones Notas
2.00 GB de RAM
600 MB de espacio en disco duro Requerimiento mínimo
Plataforma Xilinx Co-Simulation Necesarios para el flujo de hardware Co-Simulación
Tabla 3.3 Basado en Recomendaciones para Linux
Recomendaciones Notas
4 GB de RAM
600 MB de espacio en disco duro Requerimiento mínimo
Plataforma Xilinx Co-Simulation Necesarios para el flujo de hardware Co-Simulación
Los requisitos del sistema operativo y software para la versión 11.1 de System
Generator se muestran en la Tabla 3.4.
Tabla 3.4 Requisitos del sistema Operativo Windows y del software
Requerimientos Notas
Windows XP de 32 bits del sistema
operativo Service Pack 2
Xilinx ISE ® Design Suite versión 11.1
MathWorks MATLAB,Simulink con Toolbox
de Punto-Fijo Versiones 2008a o 2008b
MATLAB se debe instalar en un directorio sin
espacios (por ejemplo, C: \ MATLAB \
R2008b) Las señales Punto-Fijo del Toolbox
requieren 53 bits
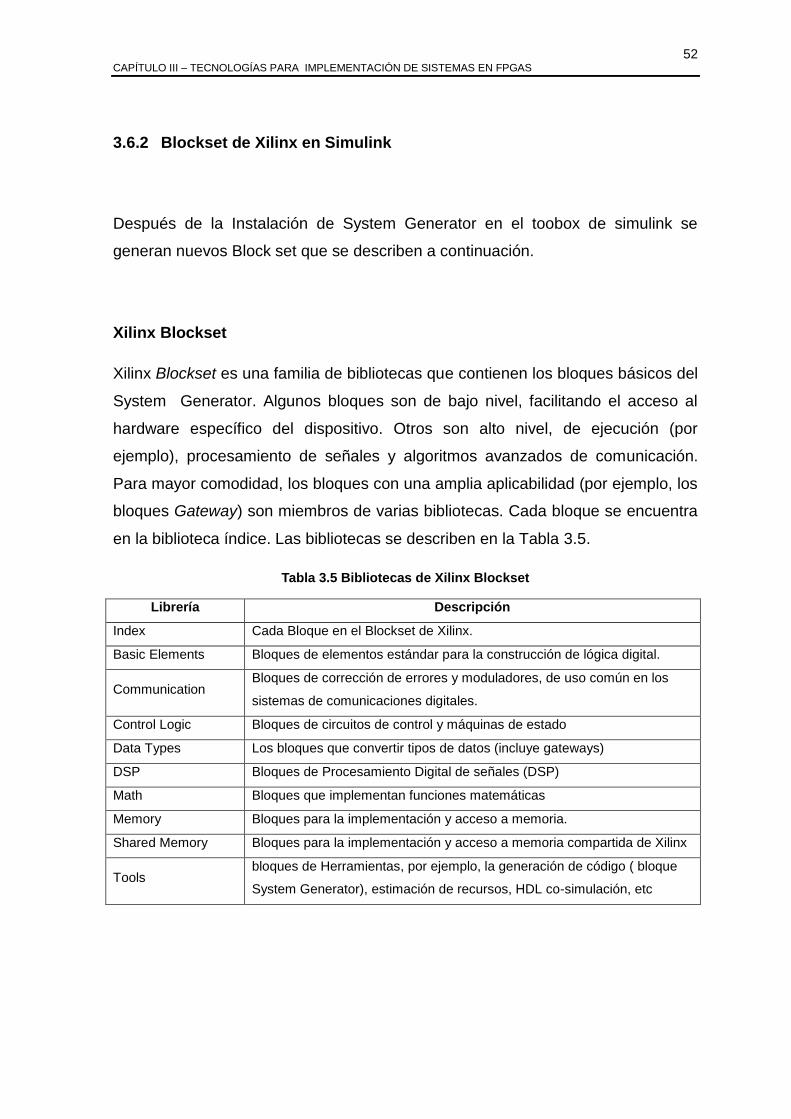
52 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
3.6.2 Blockset de Xilinx en Simulink
Después de la Instalación de System Generator en el toobox de simulink se
generan nuevos Block set que se describen a continuación.
Xilinx Blockset
Xilinx Blockset es una familia de bibliotecas que contienen los bloques básicos del
System Generator. Algunos bloques son de bajo nivel, facilitando el acceso al
hardware específico del dispositivo. Otros son alto nivel, de ejecución (por
ejemplo), procesamiento de señales y algoritmos avanzados de comunicación.
Para mayor comodidad, los bloques con una amplia aplicabilidad (por ejemplo, los
bloques Gateway) son miembros de varias bibliotecas. Cada bloque se encuentra
en la biblioteca índice. Las bibliotecas se describen en la Tabla 3.5.
Tabla 3.5 Bibliotecas de Xilinx Blockset
Librería Descripción
Index Cada Bloque en el Blockset de Xilinx.
Basic Elements Bloques de elementos estándar para la construcción de lógica digital.
Communication Bloques de corrección de errores y moduladores, de uso común en los
sistemas de comunicaciones digitales.
Control Logic Bloques de circuitos de control y máquinas de estado
Data Types Los bloques que convertir tipos de datos (incluye gateways)
DSP Bloques de Procesamiento Digital de señales (DSP)
Math Bloques que implementan funciones matemáticas
Memory Bloques para la implementación y acceso a memoria.
Shared Memory Bloques para la implementación y acceso a memoria compartida de Xilinx
Tools bloques de Herramientas, por ejemplo, la generación de código ( bloque
System Generator), estimación de recursos, HDL co-simulación, etc
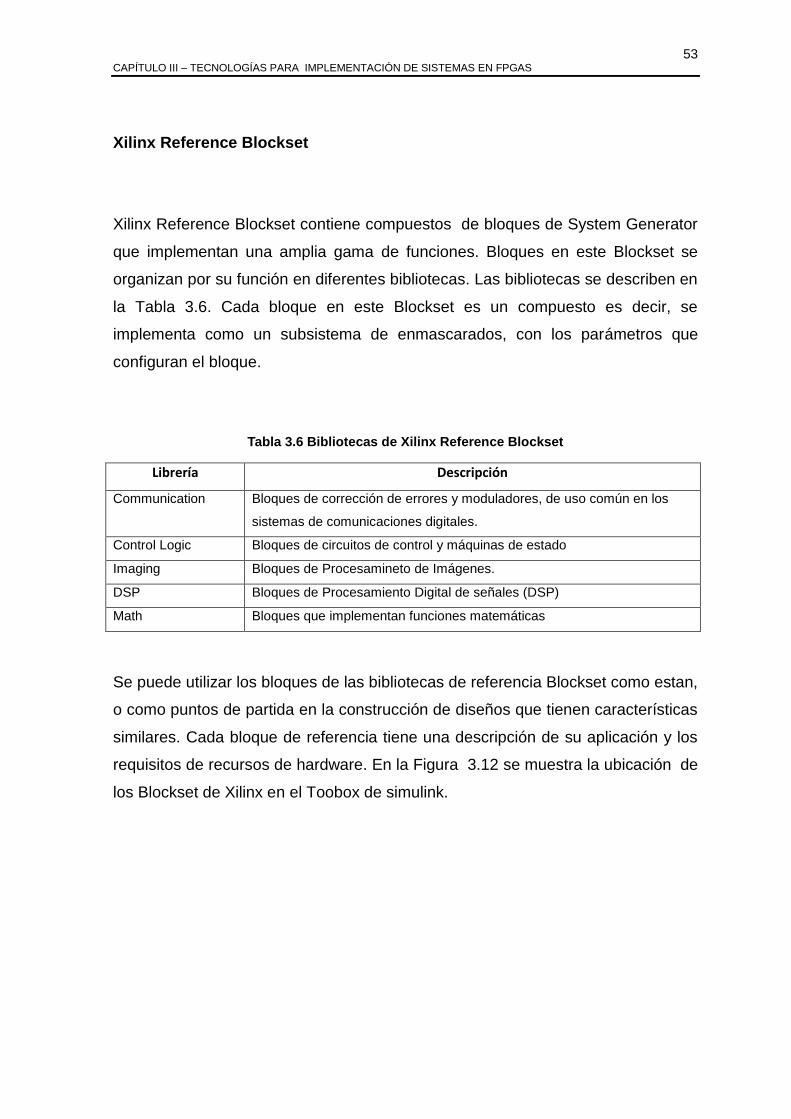
53 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
Xilinx Reference Blockset
Xilinx Reference Blockset contiene compuestos de bloques de System Generator
que implementan una amplia gama de funciones. Bloques en este Blockset se
organizan por su función en diferentes bibliotecas. Las bibliotecas se describen en
la Tabla 3.6. Cada bloque en este Blockset es un compuesto es decir, se
implementa como un subsistema de enmascarados, con los parámetros que
configuran el bloque.
Tabla 3.6 Bibliotecas de Xilinx Reference Blockset
Librería Descripción
Communication Bloques de corrección de errores y moduladores, de uso común en los
sistemas de comunicaciones digitales.
Control Logic Bloques de circuitos de control y máquinas de estado
Imaging Bloques de Procesamineto de Imágenes.
DSP Bloques de Procesamiento Digital de señales (DSP)
Math Bloques que implementan funciones matemáticas
Se puede utilizar los bloques de las bibliotecas de referencia Blockset como estan,
o como puntos de partida en la construcción de diseños que tienen características
similares. Cada bloque de referencia tiene una descripción de su aplicación y los
requisitos de recursos de hardware. En la Figura 3.12 se muestra la ubicación de
los Blockset de Xilinx en el Toobox de simulink.
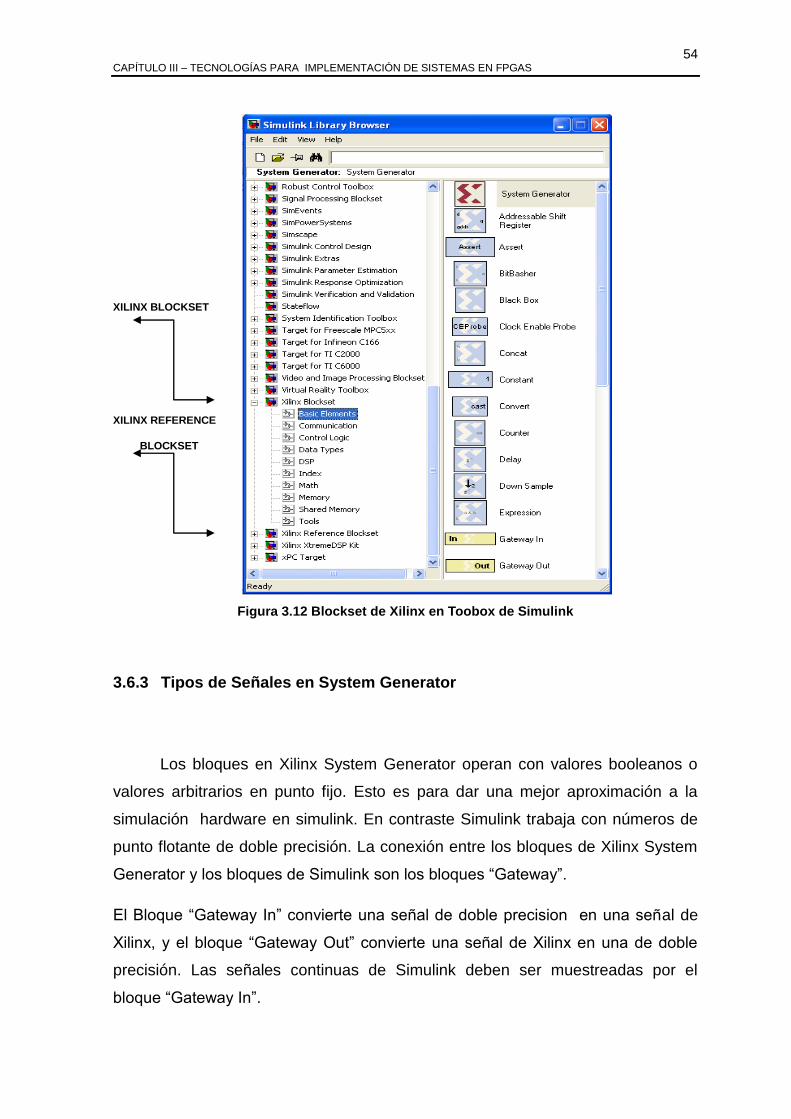
54 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
XILINX BLOCKSET
XILINX REFERENCE
BLOCKSET
Figura 3.12 Blockset de Xilinx en Toobox de Simulink
3.6.3 Tipos de Señales en System Generator
Los bloques en Xilinx System Generator operan con valores booleanos o
valores arbitrarios en punto fijo. Esto es para dar una mejor aproximación a la
simulación hardware en simulink. En contraste Simulink trabaja con números de
punto flotante de doble precisión. La conexión entre los bloques de Xilinx System
Generator y los bloques de Simulink son los bloques ―Gateway‖.
El Bloque ―Gateway In‖ convierte una señal de doble precision en una señal de
Xilinx, y el bloque ―Gateway Out‖ convierte una señal de Xilinx en una de doble
precisión. Las señales continuas de Simulink deben ser muestreadas por el
bloque ―Gateway In‖.
55 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
La mayoría de los bloques de Xilinx son polimórficos, es decir, son capaces de
deducir los tipos adecuados de salida basándose en sus tipos de entrada. Cuando
se especifica full precision en los parámetros en el cuadro de dialogo del bloque,
System Generator elige el tipo de salida para garantizar que no se pierda
precisión. La extensión de signo y el relleno de ceros ocurre automáticamente, si
es necesario. Esto permite establecer el tipo de salida de un bloque y para
especificar como la cuantización y saturación deben ser manejados. Posibilidades
de cuantificación objetiva incluyen el redondeo hacia más o menos infinito,
dependiendo del signo, o el truncamiento. Las opciones disponibles de saturación
son saturation, truncation y reporting overflow as an error.
En la parte de System Generator de un modelo simulink, cada señal debe ser
muestreada. Tiempos de muestra deben ser heredados usando reglas de
propagación de Simulink, o estableciendo explícitamente la configuración en el
cuadro de dialogo de un bloque.
Cuando hay bucles de retroalimentación, System Generator a veces no puede
deducir los períodos de la muestra y / o tipos de señales, en cuyo caso se
muestra un mensaje de error. Assert blocks se deben insertar en los lazos para
hacer frente a este problema. No es necesario añadir Assert blocks en cada punto
en un bucle, por lo general basta con añadir un Assert block en el momento de
"romper" el lazo.
3.6.4 Bloque System Generator
Cualquier diseño que incluya un bloque de Xilinx debe incluir este bloque.
Es el encargado de proporcionar el control del sistema y los parámetros de las
simulaciones, e invocar el generador de código. En la Figura 3.13 se muestra el
cuadro donde especificar los parámetros para este bloque. Estos son:
Compilation: especifica el tipo de compilación que se producirá cuando se
invoque al generador de código.
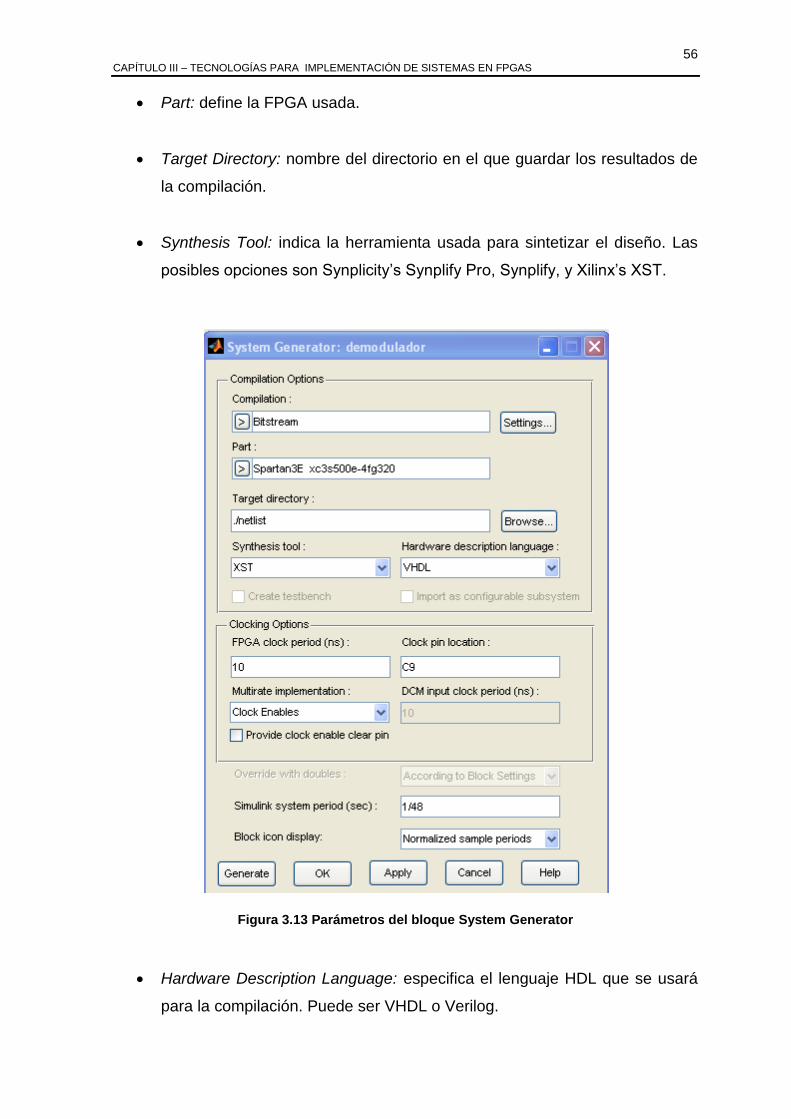
56 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
Part: define la FPGA usada.
Target Directory: nombre del directorio en el que guardar los resultados de
la compilación.
Synthesis Tool: indica la herramienta usada para sintetizar el diseño. Las
posibles opciones son Synplicity’s Synplify Pro, Synplify, y Xilinx’s XST.
Figura 3.13 Parámetros del bloque System Generator
Hardware Description Language: especifica el lenguaje HDL que se usará
para la compilación. Puede ser VHDL o Verilog.
57 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
FPGA Clock Period: define el período, en nanosegundos, del reloj
hardware. Este valor debe ser un entero.
Clock Pin Location: indica cuál es el pin del reloj. Esta información se le
pasa a las herramientas de implementación de Xilinx a través de un archivo
(xcf o ngc) en el que también se incluyen otro tipo de restricciones.
Create Testbench: si está activada esta opción le indica a System
Generator que cree un testbench.
Import as Configurable Subsystem: le indica a System Generator que haga
dos cosas:
- Que construya un bloque como resultado de la compilación.
- Que construya un subsistema configurable.
Provide clock enable clear pin: le indica a System Generator que
proporcione unbpuerto ce_clr en el top level que controla la lógica del reloj
(clock wrapper). La señal ce_clr se usa para resetear la lógica de
generación de habilitación del reloj. clock wrapper es un mecanismo de
encapsulación necesario para generar la lógica del reloj y que forma el top-
level del diseño.
Override with doubles: indica que todos los cálculos deberían realizarse
usando precisión doble.
Simulink System Period: define el período de Simulink, en segundos.
Block Icon Display: especifica el tipo de información que será mostrada en
los iconos de los bloques. Las opciones disponibles son:
- Default: muestra la información por defecto del bloque.
58 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
- Sample rates: indica la tasa normalizada para cada puerto de
entrada y salida. Esta información suele ser útil para comprobar que
no hayerrores.
-Pipeline stages: indica la latencia de los puertos de entradas. Esta
información no está disponible para algunos bloques.
- HDL port names: muestra el nombre de los puertos de entrada y
salida.
- Input data types: muestras los tipos de datos de las señales de
entrada a los bloques. Esta información suele ser útil para resolver
errores.
- Output data types: muestras los tipos de datos de las señales de
salida de los bloques. Esta información suele ser útil para resolver
errores.
Tipos de Compilación.
HDL
Ésta es la compilación por defecto. En ella se generan los archivos HDL, NGC
y EDIF necesarios para implementar el modelo diseñado. Adicionalmente se
crean otros archivos que simplifican este proceso. Todos los archivos creados
se guardan en el directorio que se indique en el bloque System Generator.
NGC
Si se selecciona esta opción permite a System Generator crear un archivo
NGC. Este archivo contiene tanto la información lógica como los requisitos
temporales y localización de los pines de los puertos. Esto significa que toda la
información relativa al diseño está contenida en un solo archivo.
59 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
Bitstream
Esta compilación crea un archivo bit que se puede cargar directamente en la
FPGA. Este archivo se llama nombre_cw.bit y se guarda en el directorio que
se indique en el bloque System Generator.
Hardware Co-simulation
Este tipo de compilación es la que se utiliza para crear el modelo que se usa
en la co-simulación hardware.
Timing
En ocasiones el hardware creado por System Generator puede no cumplir con
los requisitos de tiempo. System Generator proporciona una herramienta que
permite realizar un análisis temporal para resolver este tipo de conflictos.
Mediante este análisis se muestra el camino más lento de la parte hardware
diseñada, así como aquellos que no cumplen con los requisitos temporales.
Para poder realizar este tipo de análisis System Generator se basa en la
herramienta Trace, que forma parte del paquete ISE de Xilinx.[11]
Opciones de Clocking
Como se muestra en la Figura 3.13 cuando se utiliza el bloque de System
Generator para copilar el diseño en Hardware, hay tres opciones de clocking para
implementación multirate: (1) Clock Enables (por default), (2) Hybrid DCM-CE,
and (3) Expose Clock Ports.
Clock Enable
Cuando System Generator compila un modelo en el hardware con la opción
Clock Enable, System Generator conserva la información de frecuencia de
muestreo del diseño de tal manera que las partes correspondientes en
hardware funcionan a velocidades adecuadas. System Generator genera
frecuencias relacionadas utilizando un reloj en conjunto con el clock enable,
60 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
permitiendo una sola frecuencia. El período de cada clock enable es un
múltiplo entero del periodo del reloj del sistema.
Dentro de Simulink, ni relojes, ni clock enable se requieren como señales
explícitas en un diseño del System Generator. Cuando el System Generator
compila un diseño en el hardware, utiliza las frecuencias de muestreo en el
diseño para deducir que clock enables son necesarios. Para ello, emplea dos
valores especificados por el usuario del Bloque de System Generator: el
período del sistema en simulink y el período del reloj del FPGA. Estos
números definen el factor de escala entre el tiempo en una simulación de
Simulink, y el tiempo en la aplicación de hardware real. El periodo del sistema
en simulink debe ser el máximo común divisor (mcd) de los períodos de
muestreo que aparece en el modelo, y el período de reloj FPGA, en
nanosegundos, del reloj del sistema. Si p representa el período del sistema en
Simulink, y c representa el período del reloj del sistema FPGA, entonces si un
componente que tiene unidades de tiempo kp en Simulink, k momentos del
reloj del sistema (de ahí nanosegundos kc) en el hardware.
Para ilustrar este punto, se puede considerar un modelo que tiene tres
periodos de muestra de diferentes componentes en Simulink 2, 3 y 4. El mcd
de estos períodos de muestra de los componentes es 1, este valor debe
especificarse en el campo de periodo de Simulink en el bloque de System
Generator. Suponiendo que el reloj del FPGA es 10ns. Con esta información,
el periodo del clock enable correspondiente puede ser determinado en el
hardware.
En cuanto a hardware se refiere el clock enable correspondiente para periodos
de muestra de simulink 2,3 y 4 como CE2, CE3 y CE4, respectivamente. La
relación de cada período de clock enable con el período del reloj del sistema
puede ser determinado dividiendo el correspondiente período de los
componentes de Simulink por el valor del período del sistema en Simulink. Por
lo tanto, los peridos de CE2,CE3 y CE4 son iguales a 2,3,4 respectivamente
ya que el valor del periodo del sistema en simulink es1. El la Figura 3.14 se
muestra un diagrama de este análisis.
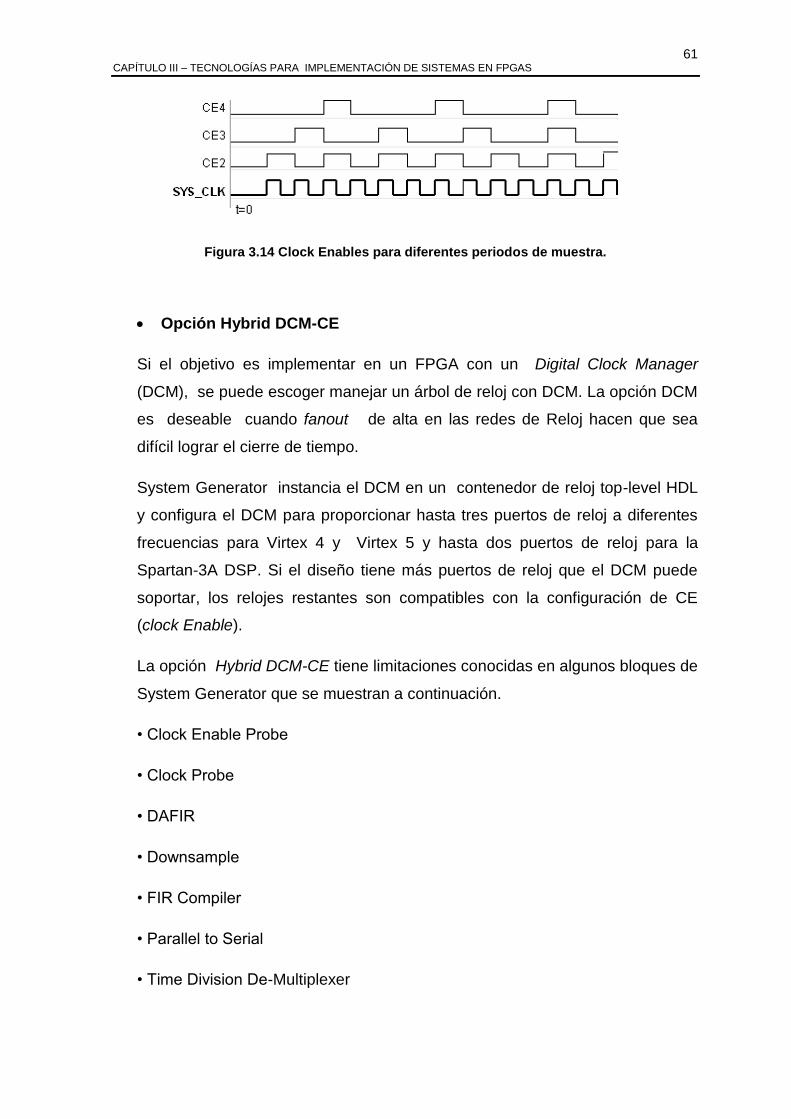
61 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
Figura 3.14 Clock Enables para diferentes periodos de muestra.
Opción Hybrid DCM-CE
Si el objetivo es implementar en un FPGA con un Digital Clock Manager
(DCM), se puede escoger manejar un árbol de reloj con DCM. La opción DCM
es deseable cuando fanout de alta en las redes de Reloj hacen que sea
difícil lograr el cierre de tiempo.
System Generator instancia el DCM en un contenedor de reloj top-level HDL
y configura el DCM para proporcionar hasta tres puertos de reloj a diferentes
frecuencias para Virtex 4 y Virtex 5 y hasta dos puertos de reloj para la
Spartan-3A DSP. Si el diseño tiene más puertos de reloj que el DCM puede
soportar, los relojes restantes son compatibles con la configuración de CE
(clock Enable).
La opción Hybrid DCM-CE tiene limitaciones conocidas en algunos bloques de
System Generator que se muestran a continuación.
• Clock Enable Probe
• Clock Probe
• DAFIR
• Downsample
• FIR Compiler
• Parallel to Serial
• Time Division De-Multiplexer
62 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
• Time Division Multiplexer
• Upsample
Opción Expose Clock Ports
Al seleccionar esta opción, el System Generator crea un contenedor top_level
que expone un puerto de reloj para cada frecuencia. Entonces se puede
instanciar manualmente un generador de reloj fuera de la unidad de diseño
para los puertos del reloj.
3.6.5 Importación de Código
System Generator posee una librería con un gran número de bloques que
cumplen una amplia variedad de funciones. Sin embargo puede surgir la
necesidad de crear nuevos bloques ya sea para optimizar los recursos hardware o
porque no haya ninguno que se adapte a los requerimientos del diseñador. Para
estos casos existe la posibilidad de importar código HDL o Matlab.
.
Black Box Este bloque proporciona una forma de incluir código VHDL o Verilog en el sistema
que se esté creando.
Requerimientos del código HDL Al crear el código HDL que describa al circuito se deben tener en cuenta las
siguientes restricciones:
El nombre de la entidad no debe coincidir con el nombre de ninguna
entidad que esté reservada para System Generator (generalmente suelen
63 CAPÍTULO III – TECNOLOGÍAS PARA IMPLEMENTACIÓN DE SISTEMAS EN FPGAS
llamarse como el bloque anteponiendo el prefijo xl, por ejemplo, xlfir,
xlregister).
El nombre de la entidad no debe coincidir con el nombre del modelo
Simulink que se está creando. Se recomienda evitar coincidencias entres
los nombres de los archivos y las entidades.
Los puertos bidireccionales no están permitidos en el top-level del Black
Box.
Para Black Box basadas en Verilog los módulos y nombres de los puertos
deben seguir el mismo estándar que para el caso de VHDL.
Cualquier puerto que sea para el reloj o la habilitación del reloj debe ser de
tipo std_logic (para el caso de Verilog tales puertos deben ser de tipo
nonvector).
El reloj se trata como sigue:
Siempre debe aparecer un puerto para el reloj y otro para la habilitación
del reloj (para cada reloj hay una habilitación de reloj y viceversa). Aunque
para un Black Box pueda haber más de un puerto para el reloj, sólo se
usará uno para dirigir al resto, que sólo se diferencian en la velocidad.
Los nombres de los puertos del reloj y habilitación del reloj deben contener
las cadenas clk y ce respectivamente. El nombre de la habilitación del reloj
debe ser el mismo que el del reloj pero cambiando la cadena clk por ce. Por
ejemplo: src_clk_1 y src_ce_1.
Ninguno de los puertos (reloj y habilitación) aparecen en el icono del Black
Box.
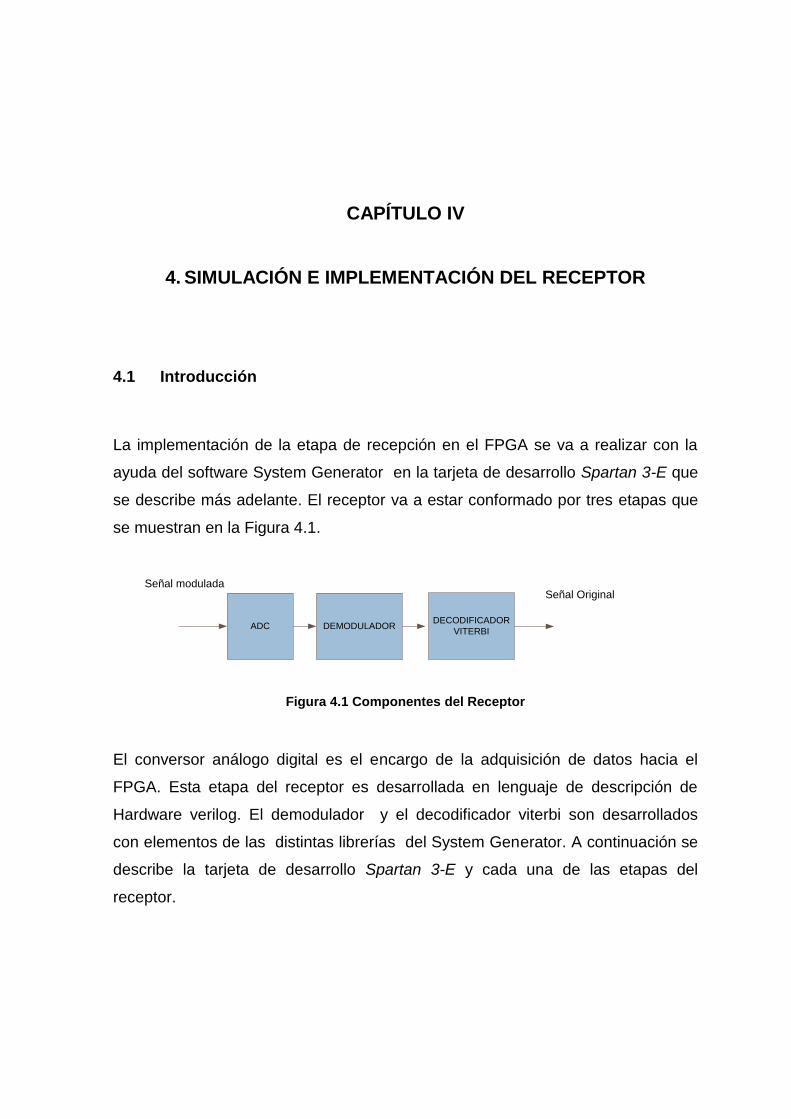
CAPÍTULO IV
4. SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
4.1 Introducción
La implementación de la etapa de recepción en el FPGA se va a realizar con la
ayuda del software System Generator en la tarjeta de desarrollo Spartan 3-E que
se describe más adelante. El receptor va a estar conformado por tres etapas que
se muestran en la Figura 4.1.
ADC DEMODULADORDECODIFICADOR
VITERBI
Señal modulada Señal Original
Figura 4.1 Componentes del Receptor
El conversor análogo digital es el encargo de la adquisición de datos hacia el
FPGA. Esta etapa del receptor es desarrollada en lenguaje de descripción de
Hardware verilog. El demodulador y el decodificador viterbi son desarrollados
con elementos de las distintas librerías del System Generator. A continuación se
describe la tarjeta de desarrollo Spartan 3-E y cada una de las etapas del
receptor.
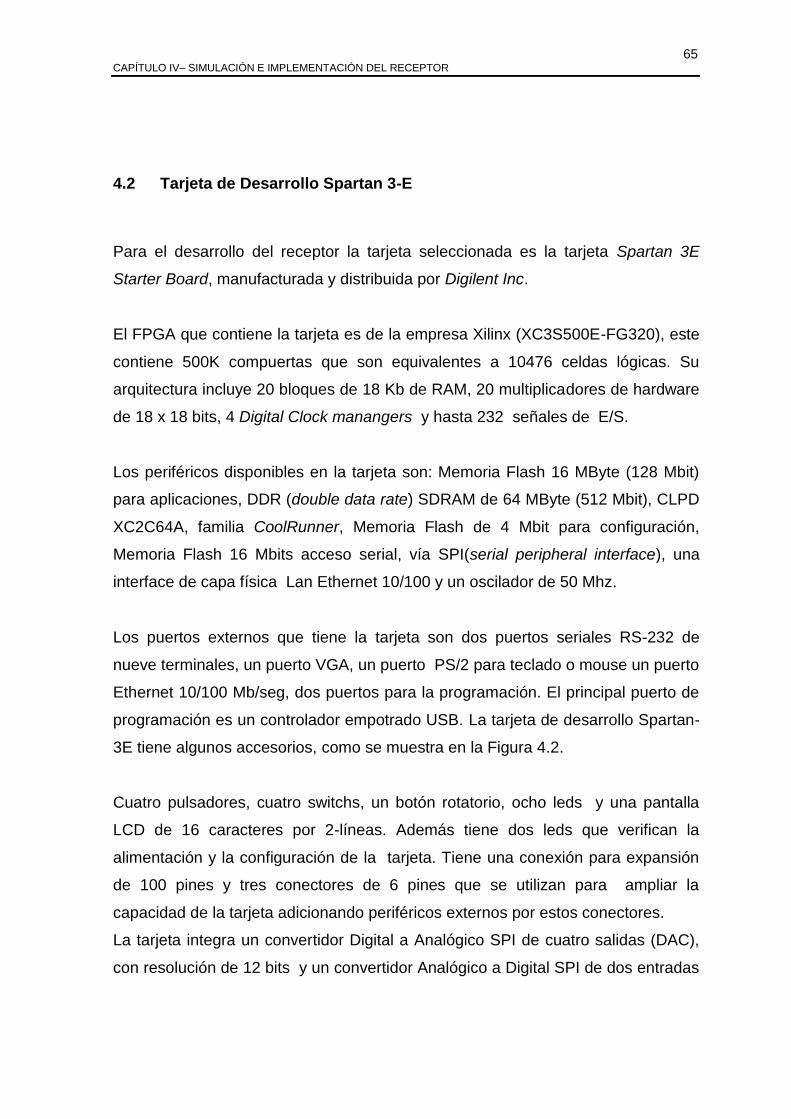
65 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
4.2 Tarjeta de Desarrollo Spartan 3-E
Para el desarrollo del receptor la tarjeta seleccionada es la tarjeta Spartan 3E
Starter Board, manufacturada y distribuida por Digilent Inc.
El FPGA que contiene la tarjeta es de la empresa Xilinx (XC3S500E-FG320), este
contiene 500K compuertas que son equivalentes a 10476 celdas lógicas. Su
arquitectura incluye 20 bloques de 18 Kb de RAM, 20 multiplicadores de hardware
de 18 x 18 bits, 4 Digital Clock manangers y hasta 232 señales de E/S.
Los periféricos disponibles en la tarjeta son: Memoria Flash 16 MByte (128 Mbit)
para aplicaciones, DDR (double data rate) SDRAM de 64 MByte (512 Mbit), CLPD
XC2C64A, familia CoolRunner, Memoria Flash de 4 Mbit para configuración,
Memoria Flash 16 Mbits acceso serial, vía SPI(serial peripheral interface), una
interface de capa física Lan Ethernet 10/100 y un oscilador de 50 Mhz.
Los puertos externos que tiene la tarjeta son dos puertos seriales RS-232 de
nueve terminales, un puerto VGA, un puerto PS/2 para teclado o mouse un puerto
Ethernet 10/100 Mb/seg, dos puertos para la programación. El principal puerto de
programación es un controlador empotrado USB. La tarjeta de desarrollo Spartan-
3E tiene algunos accesorios, como se muestra en la Figura 4.2.
Cuatro pulsadores, cuatro switchs, un botón rotatorio, ocho leds y una pantalla
LCD de 16 caracteres por 2-líneas. Además tiene dos leds que verifican la
alimentación y la configuración de la tarjeta. Tiene una conexión para expansión
de 100 pines y tres conectores de 6 pines que se utilizan para ampliar la
capacidad de la tarjeta adicionando periféricos externos por estos conectores.
La tarjeta integra un convertidor Digital a Analógico SPI de cuatro salidas (DAC),
con resolución de 12 bits y un convertidor Analógico a Digital SPI de dos entradas
66 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
(ADC) con resolución de 14 bits y pre - amplificador con ganancia programable
todos manufacturados por Linear Technology.[12]
Figura 4.2 Tarjeta de Desarrollo Spartan 3E
4.3 Conversor Análogo Digital
El conversor Análogo Digital en este proyecto se desarrolla con herramientas
diferentes a System Generator debido a la no existencia de un bloque en
Simulink que permita manipular el ADC integrado en la Tarjeta de desarrollo
Spartan 3-E.
El control de este dispositivo periférico está diseñado en el lenguaje de
descripción de hardware verilog y para la integración con el resto de sistema
diseñado en System Generator se utilizan herramientas del propio System
Generator. El desarrollo de cada una de estas etapas se explica a continuación.
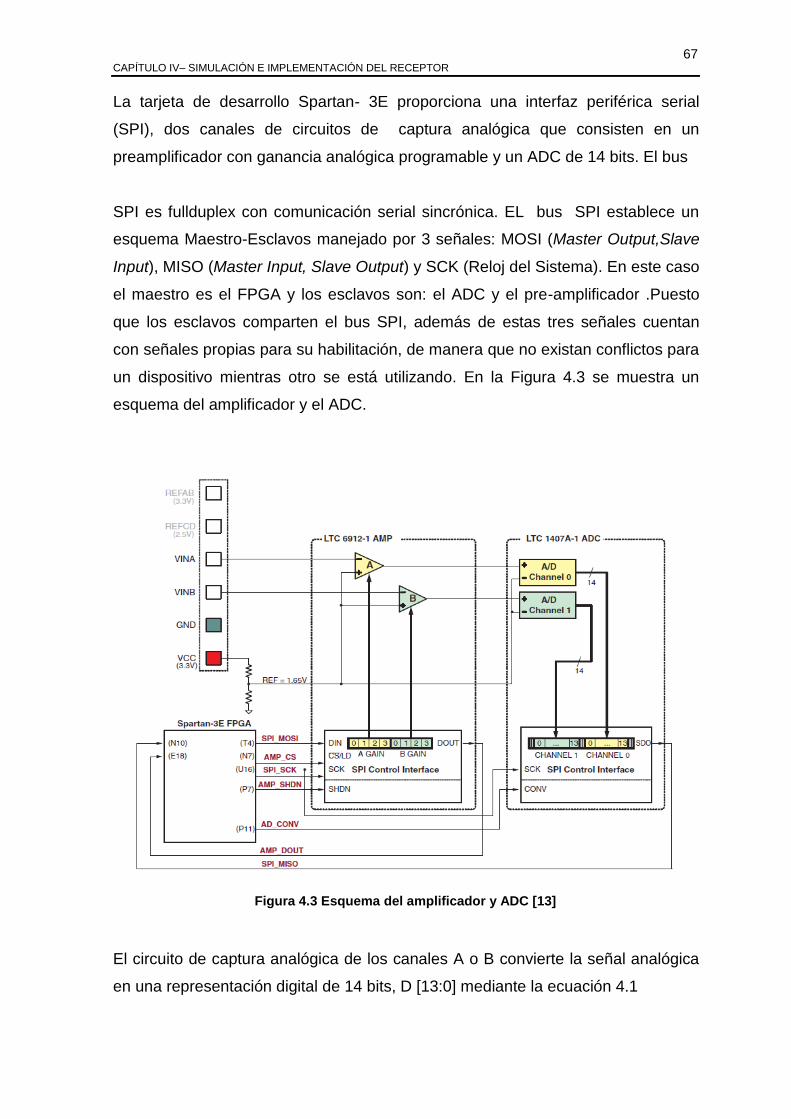
67 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
La tarjeta de desarrollo Spartan- 3E proporciona una interfaz periférica serial
(SPI), dos canales de circuitos de captura analógica que consisten en un
preamplificador con ganancia analógica programable y un ADC de 14 bits. El bus
SPI es fullduplex con comunicación serial sincrónica. EL bus SPI establece un
esquema Maestro-Esclavos manejado por 3 señales: MOSI (Master Output,Slave
Input), MISO (Master Input, Slave Output) y SCK (Reloj del Sistema). En este caso
el maestro es el FPGA y los esclavos son: el ADC y el pre-amplificador .Puesto
que los esclavos comparten el bus SPI, además de estas tres señales cuentan
con señales propias para su habilitación, de manera que no existan conflictos para
un dispositivo mientras otro se está utilizando. En la Figura 4.3 se muestra un
esquema del amplificador y el ADC.
Figura 4.3 Esquema del amplificador y ADC [13]
El circuito de captura analógica de los canales A o B convierte la señal analógica
en una representación digital de 14 bits, D [13:0] mediante la ecuación 4.1

68 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
La GANANCIA es el valor que está establecido en la programación del
preamplificador .El voltaje de referencia para el amplificador y el ADC es 1.65V,
generado a través del divisor de tensión como se muestra en la Figura 4.3. El
alcance máximo del ADC es de ± 1,25 V, en torno a la tensión de referencia,
1.65V.El valor de 8192 se obtiene de la representación de los 14 bits en
complemento a dos.
Las señales del bus SPI son compartidas por otros dispositivos en el tablero. Es
necesario que otros dispositivos se desactiven cuando se comunica el FPGA con
el amplificador o ADC para evitar conflicto en el bus. Tabla 4.1 proporciona las
señales y los valores lógicos necesarios para desactivar los otros dispositivos.
Tabla 4.1 Desactivar otros dispositivos en el bus SPI
Señales Dispositivo Deshabilitado Valor para Deshabilitar
SPI_SS_B SPI Serial Flash 1
AMP_CS Preamplificador
programable 1
DAC_CS DAC 1
SF_CE0 StrataFlash Parallel Flash
PROM 1
FPGA_INIT_B Platform Flash PROM 1
Después de que los dispositivos en el bus SPI son desactivados, para que el
preamplificador se active a la señal AMP_CS se le asigna el valor lógico 0. El
flaco de subida de la señal de SCK es usado para transmitir una palabra de 8 bits,
los 4 bits más significativos se refieren al canal B y los menos significativos se
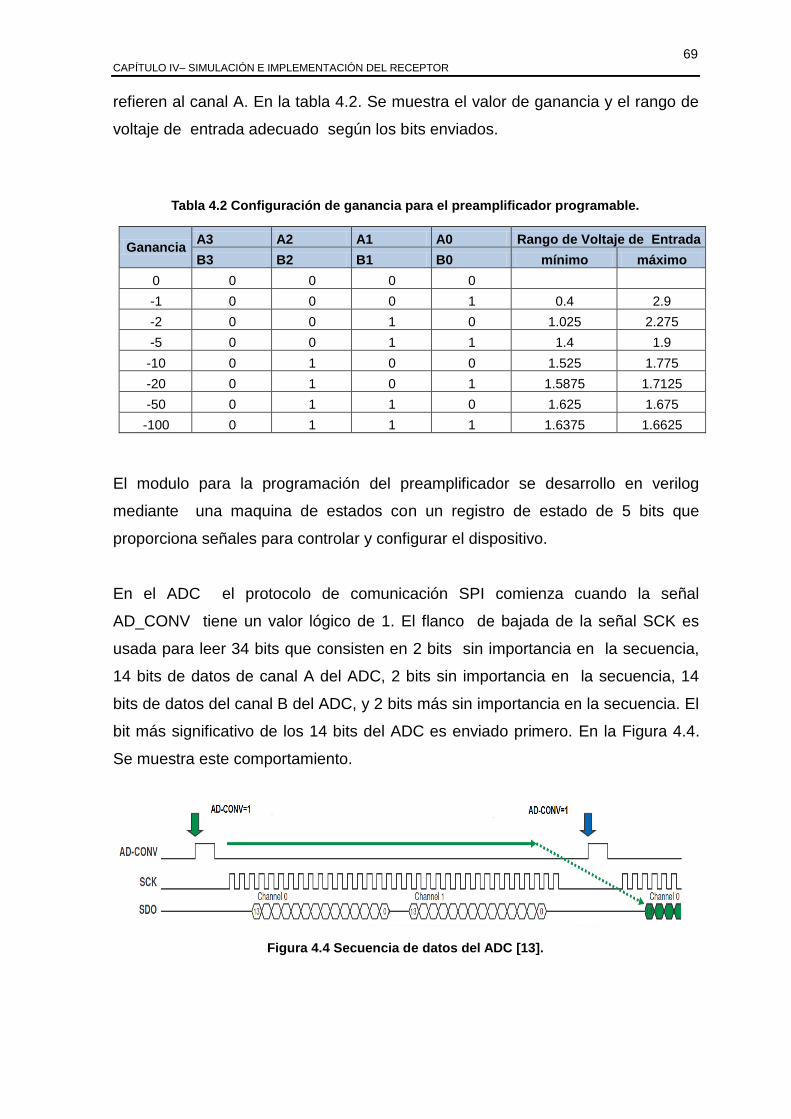
69 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
refieren al canal A. En la tabla 4.2. Se muestra el valor de ganancia y el rango de
voltaje de entrada adecuado según los bits enviados.
Tabla 4.2 Configuración de ganancia para el preamplificador programable.
Ganancia A3 A2 A1 A0 Rango de Voltaje de Entrada
B3 B2 B1 B0 mínimo máximo
0 0 0 0 0
-1 0 0 0 1 0.4 2.9
-2 0 0 1 0 1.025 2.275
-5 0 0 1 1 1.4 1.9
-10 0 1 0 0 1.525 1.775
-20 0 1 0 1 1.5875 1.7125
-50 0 1 1 0 1.625 1.675
-100 0 1 1 1 1.6375 1.6625
El modulo para la programación del preamplificador se desarrollo en verilog
mediante una maquina de estados con un registro de estado de 5 bits que
proporciona señales para controlar y configurar el dispositivo.
En el ADC el protocolo de comunicación SPI comienza cuando la señal
AD_CONV tiene un valor lógico de 1. El flanco de bajada de la señal SCK es
usada para leer 34 bits que consisten en 2 bits sin importancia en la secuencia,
14 bits de datos de canal A del ADC, 2 bits sin importancia en la secuencia, 14
bits de datos del canal B del ADC, y 2 bits más sin importancia en la secuencia. El
bit más significativo de los 14 bits del ADC es enviado primero. En la Figura 4.4.
Se muestra este comportamiento.
Figura 4.4 Secuencia de datos del ADC [13].
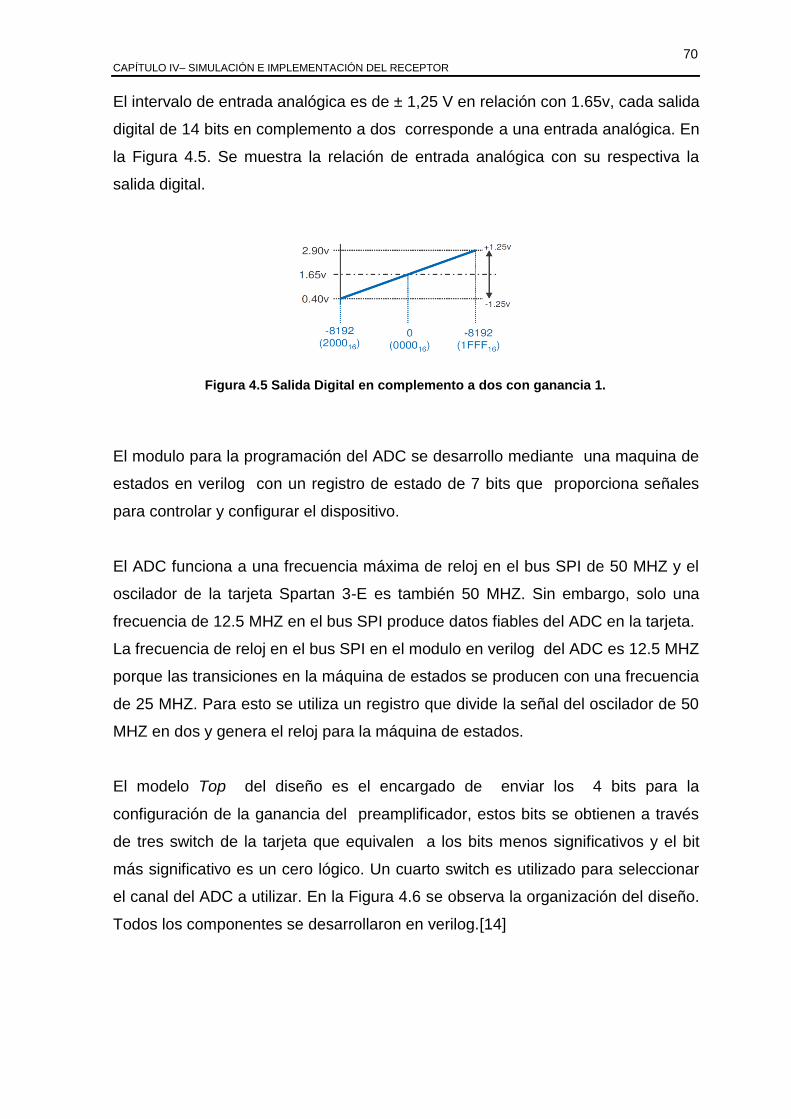
70 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
El intervalo de entrada analógica es de ± 1,25 V en relación con 1.65v, cada salida
digital de 14 bits en complemento a dos corresponde a una entrada analógica. En
la Figura 4.5. Se muestra la relación de entrada analógica con su respectiva la
salida digital.
Figura 4.5 Salida Digital en complemento a dos con ganancia 1.
El modulo para la programación del ADC se desarrollo mediante una maquina de
estados en verilog con un registro de estado de 7 bits que proporciona señales
para controlar y configurar el dispositivo.
El ADC funciona a una frecuencia máxima de reloj en el bus SPI de 50 MHZ y el
oscilador de la tarjeta Spartan 3-E es también 50 MHZ. Sin embargo, solo una
frecuencia de 12.5 MHZ en el bus SPI produce datos fiables del ADC en la tarjeta.
La frecuencia de reloj en el bus SPI en el modulo en verilog del ADC es 12.5 MHZ
porque las transiciones en la máquina de estados se producen con una frecuencia
de 25 MHZ. Para esto se utiliza un registro que divide la señal del oscilador de 50
MHZ en dos y genera el reloj para la máquina de estados.
El modelo Top del diseño es el encargado de enviar los 4 bits para la
configuración de la ganancia del preamplificador, estos bits se obtienen a través
de tres switch de la tarjeta que equivalen a los bits menos significativos y el bit
más significativo es un cero lógico. Un cuarto switch es utilizado para seleccionar
el canal del ADC a utilizar. En la Figura 4.6 se observa la organización del diseño.
Todos los componentes se desarrollaron en verilog.[14]
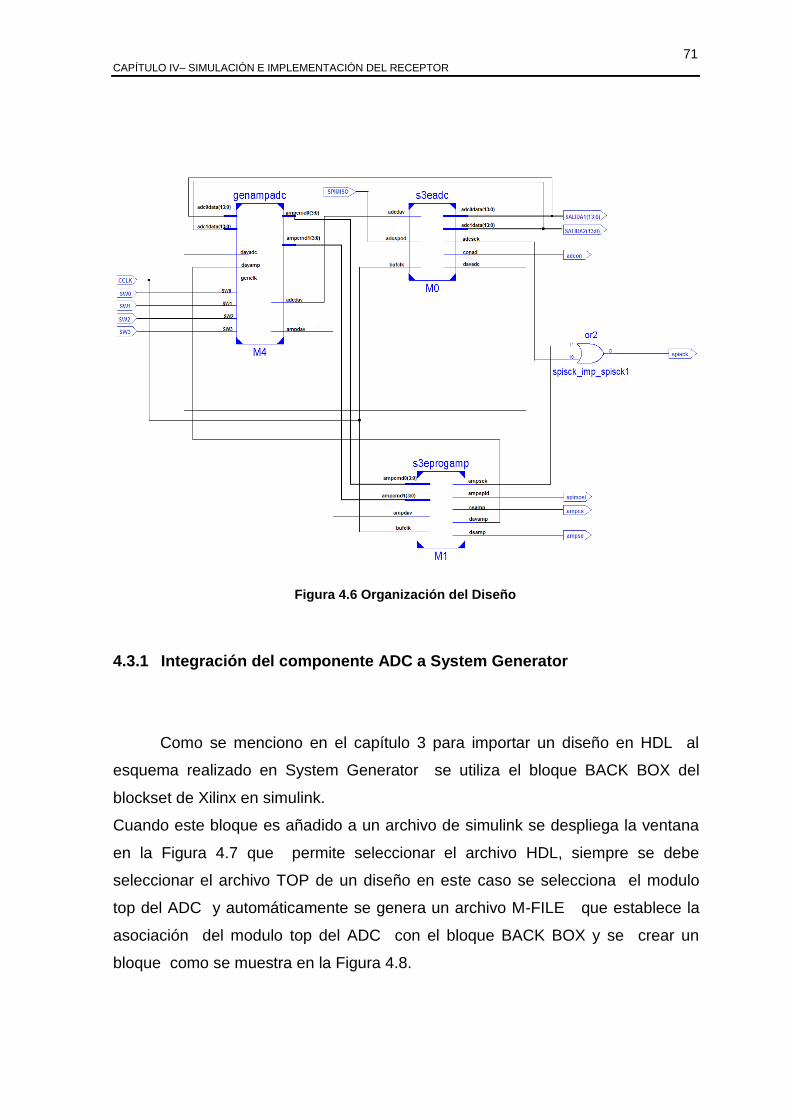
71 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
Figura 4.6 Organización del Diseño
4.3.1 Integración del componente ADC a System Generator
Como se menciono en el capítulo 3 para importar un diseño en HDL al
esquema realizado en System Generator se utiliza el bloque BACK BOX del
blockset de Xilinx en simulink.
Cuando este bloque es añadido a un archivo de simulink se despliega la ventana
en la Figura 4.7 que permite seleccionar el archivo HDL, siempre se debe
seleccionar el archivo TOP de un diseño en este caso se selecciona el modulo
top del ADC y automáticamente se genera un archivo M-FILE que establece la
asociación del modulo top del ADC con el bloque BACK BOX y se crear un
bloque como se muestra en la Figura 4.8.
72 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
Figura 4.7 Ventana para le selección del archivo HDL
Es necesario que el archivo HDL esté en la misma carpeta donde se crea el
diseño en simulink para evitar conflictos en la generación del archivo M-FILE del
bloque.
Figura 4.8 BLACK BOX del modulo top del ADC
sw3
In
sw2
In
sw1
In
sw0
In
spisf
Out
spisck
Out
spimosi
Out
spimiso
In
sfce
Out
lcdrw
Out
lcdrs
Out
lcde
Out
lcddat
Out
fpgaib
Out
daccs
Out
dacclr
Out
cclk
In
btn 0
In
ampsd
Out
ampcs
Out
adcon
Out
Black Box
cclk
btn 0
sw0
sw1
sw2
sw3
spimiso
spimosi
spisck
daccs
dacclr
spisf
ampcs
ampsd
adcon
sfce
fpgaib
lcdrs
lcdrw
lcde
lcddat
salida 1
salida 2
System
Generator
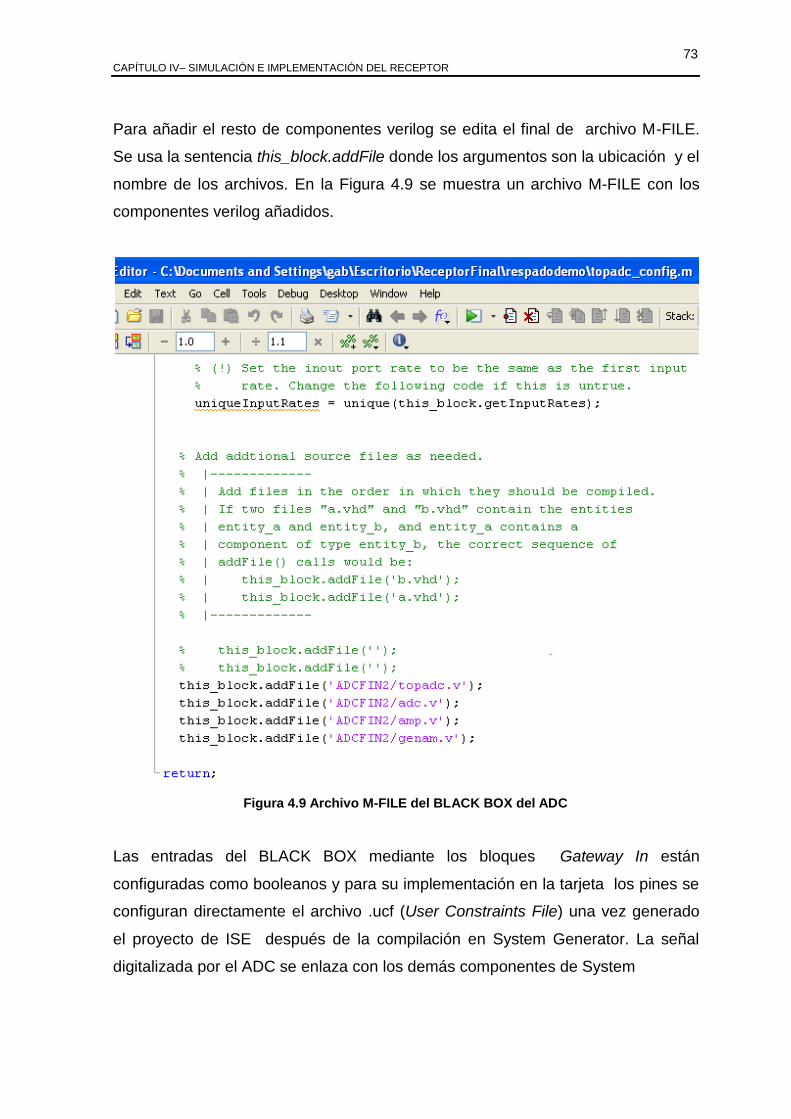
73 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
Para añadir el resto de componentes verilog se edita el final de archivo M-FILE.
Se usa la sentencia this_block.addFile donde los argumentos son la ubicación y el
nombre de los archivos. En la Figura 4.9 se muestra un archivo M-FILE con los
componentes verilog añadidos.
Figura 4.9 Archivo M-FILE del BLACK BOX del ADC
Las entradas del BLACK BOX mediante los bloques Gateway In están
configuradas como booleanos y para su implementación en la tarjeta los pines se
configuran directamente el archivo .ucf (User Constraints File) una vez generado
el proyecto de ISE después de la compilación en System Generator. La señal
digitalizada por el ADC se enlaza con los demás componentes de System
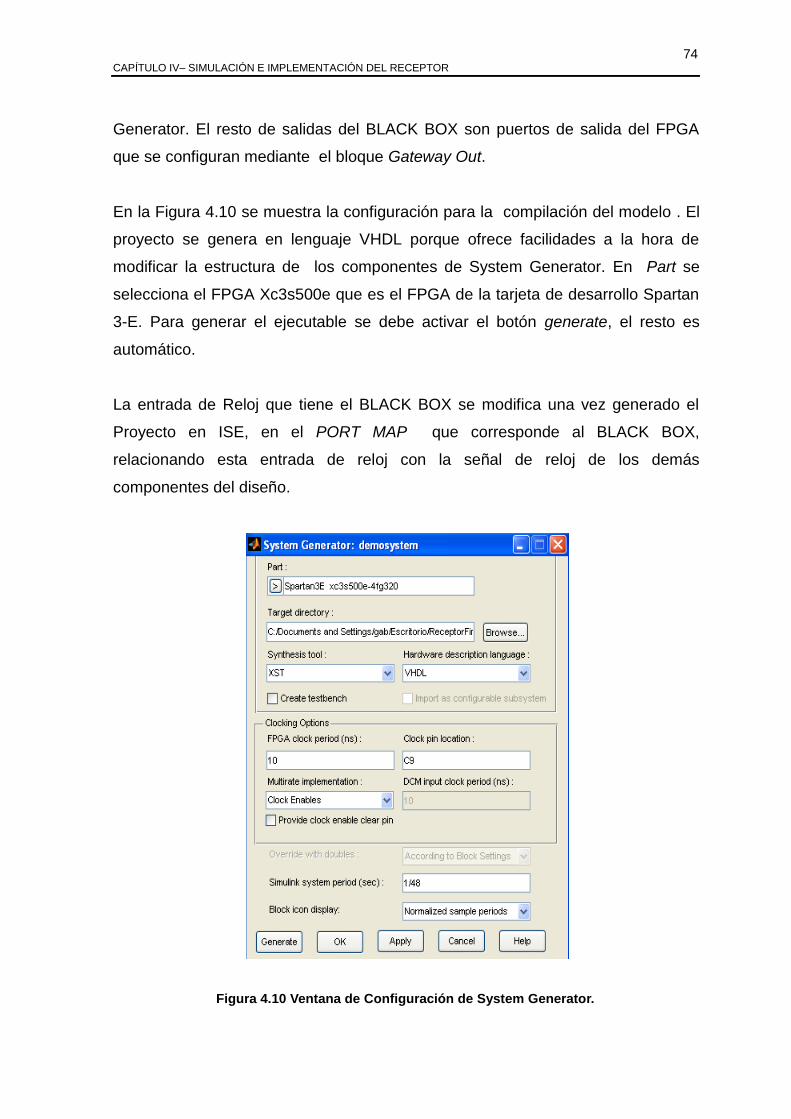
74 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
Generator. El resto de salidas del BLACK BOX son puertos de salida del FPGA
que se configuran mediante el bloque Gateway Out.
En la Figura 4.10 se muestra la configuración para la compilación del modelo . El
proyecto se genera en lenguaje VHDL porque ofrece facilidades a la hora de
modificar la estructura de los componentes de System Generator. En Part se
selecciona el FPGA Xc3s500e que es el FPGA de la tarjeta de desarrollo Spartan
3-E. Para generar el ejecutable se debe activar el botón generate, el resto es
automático.
La entrada de Reloj que tiene el BLACK BOX se modifica una vez generado el
Proyecto en ISE, en el PORT MAP que corresponde al BLACK BOX,
relacionando esta entrada de reloj con la señal de reloj de los demás
componentes del diseño.
Figura 4.10 Ventana de Configuración de System Generator.
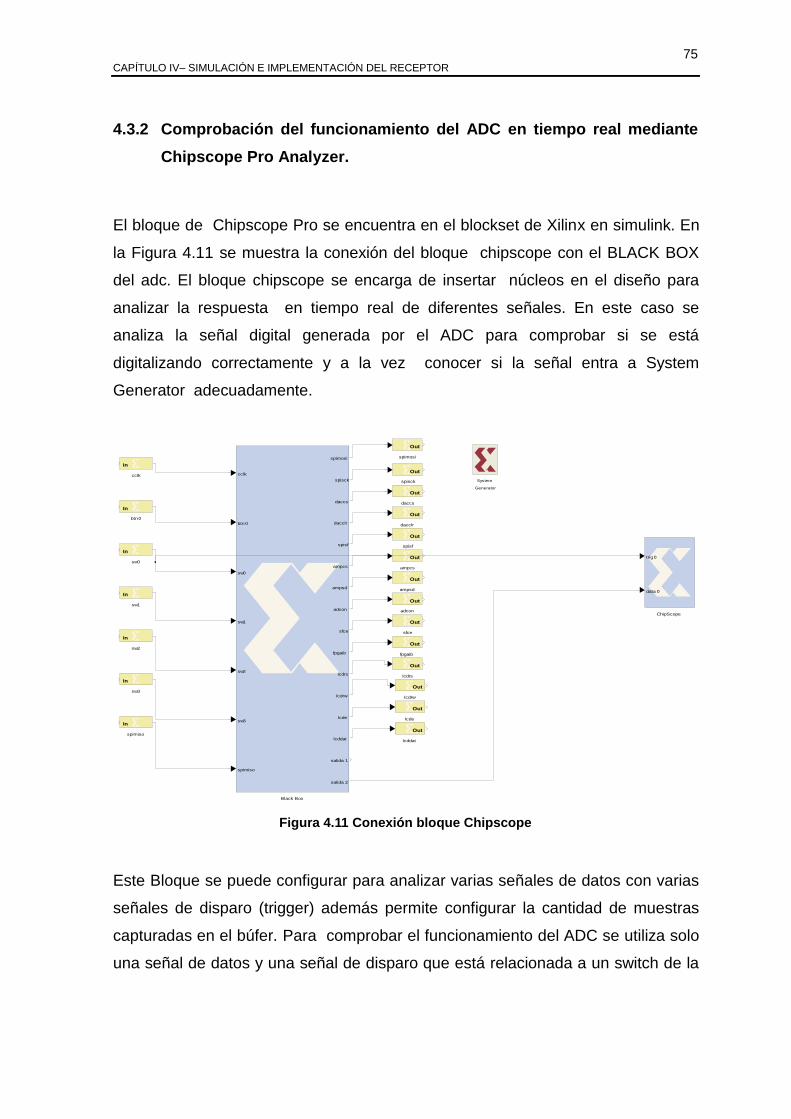
75 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
4.3.2 Comprobación del funcionamiento del ADC en tiempo real mediante
Chipscope Pro Analyzer.
El bloque de Chipscope Pro se encuentra en el blockset de Xilinx en simulink. En
la Figura 4.11 se muestra la conexión del bloque chipscope con el BLACK BOX
del adc. El bloque chipscope se encarga de insertar núcleos en el diseño para
analizar la respuesta en tiempo real de diferentes señales. En este caso se
analiza la señal digital generada por el ADC para comprobar si se está
digitalizando correctamente y a la vez conocer si la señal entra a System
Generator adecuadamente.
Figura 4.11 Conexión bloque Chipscope
Este Bloque se puede configurar para analizar varias señales de datos con varias
señales de disparo (trigger) además permite configurar la cantidad de muestras
capturadas en el búfer. Para comprobar el funcionamiento del ADC se utiliza solo
una señal de datos y una señal de disparo que está relacionada a un switch de la
sw3
In
sw2
In
sw1
In
sw0
In spisf
Out
spisck
Out
spimosi
Out
spimiso
In
sfce
Out
lcdrw
Out
lcdrs
Out
lcde
Out
lcddat
Out
fpgaib
Out
daccs
Out
dacclr
Out
cclk
In
btn0
In
ampsd
Out
ampcs
Out
adcon
Out
ChipScope
trig 0
data 0
Black Box
cclk
btn0
sw0
sw1
sw2
sw3
spimiso
spimosi
spisck
daccs
dacclr
spisf
ampcs
ampsd
adcon
sfce
fpgaib
lcdrs
lcdrw
lcde
lcddat
salida 1
salida 2
System
Generator
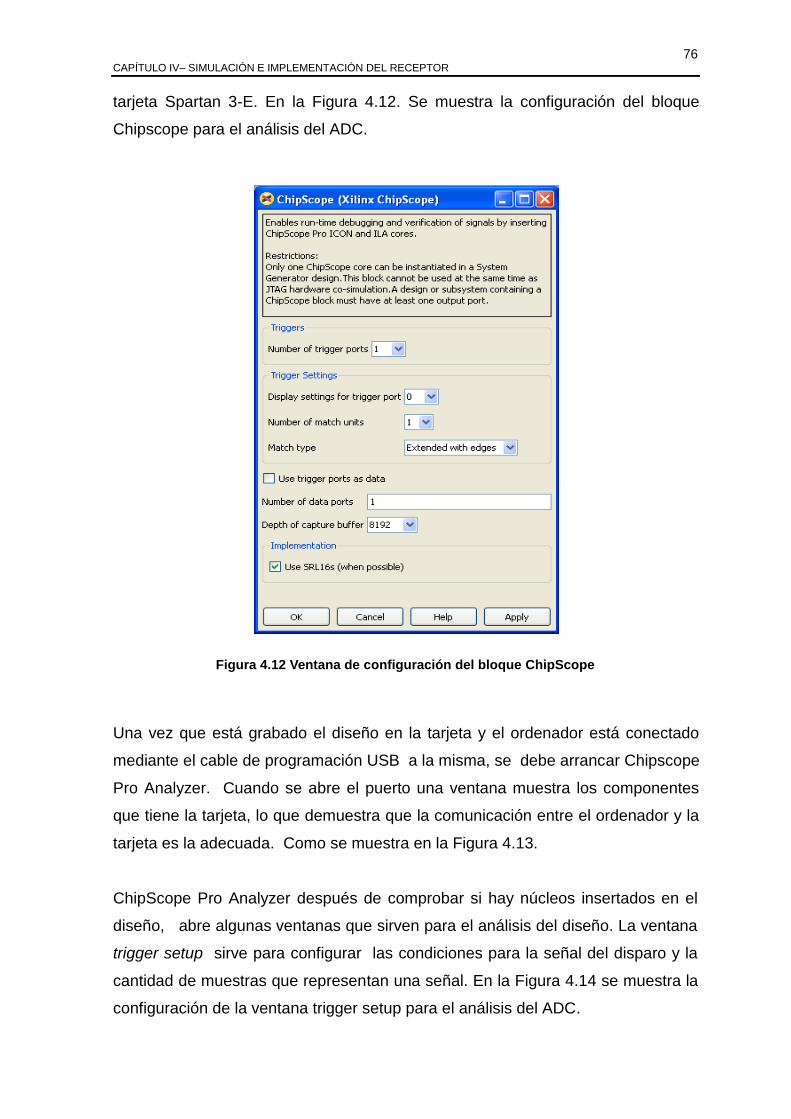
76 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
tarjeta Spartan 3-E. En la Figura 4.12. Se muestra la configuración del bloque
Chipscope para el análisis del ADC.
Figura 4.12 Ventana de configuración del bloque ChipScope
Una vez que está grabado el diseño en la tarjeta y el ordenador está conectado
mediante el cable de programación USB a la misma, se debe arrancar Chipscope
Pro Analyzer. Cuando se abre el puerto una ventana muestra los componentes
que tiene la tarjeta, lo que demuestra que la comunicación entre el ordenador y la
tarjeta es la adecuada. Como se muestra en la Figura 4.13.
ChipScope Pro Analyzer después de comprobar si hay núcleos insertados en el
diseño, abre algunas ventanas que sirven para el análisis del diseño. La ventana
trigger setup sirve para configurar las condiciones para la señal del disparo y la
cantidad de muestras que representan una señal. En la Figura 4.14 se muestra la
configuración de la ventana trigger setup para el análisis del ADC.
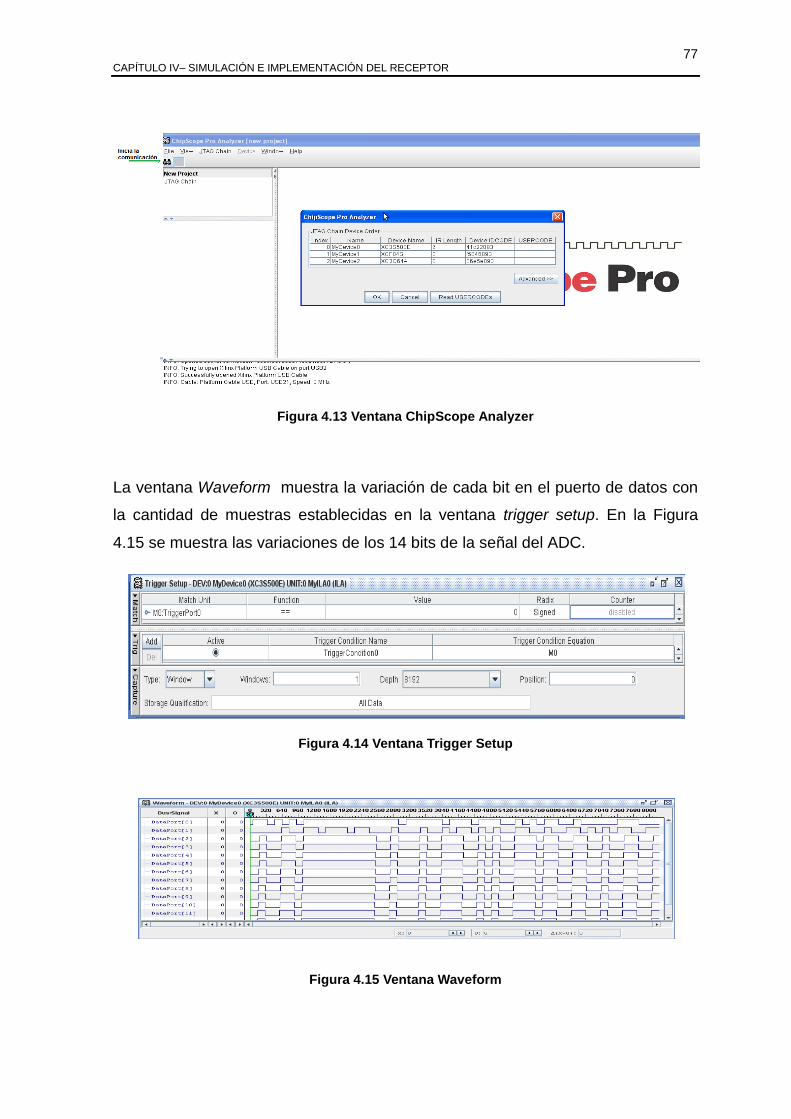
77 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
Figura 4.13 Ventana ChipScope Analyzer
La ventana Waveform muestra la variación de cada bit en el puerto de datos con
la cantidad de muestras establecidas en la ventana trigger setup. En la Figura
4.15 se muestra las variaciones de los 14 bits de la señal del ADC.
Figura 4.14 Ventana Trigger Setup
Figura 4.15 Ventana Waveform
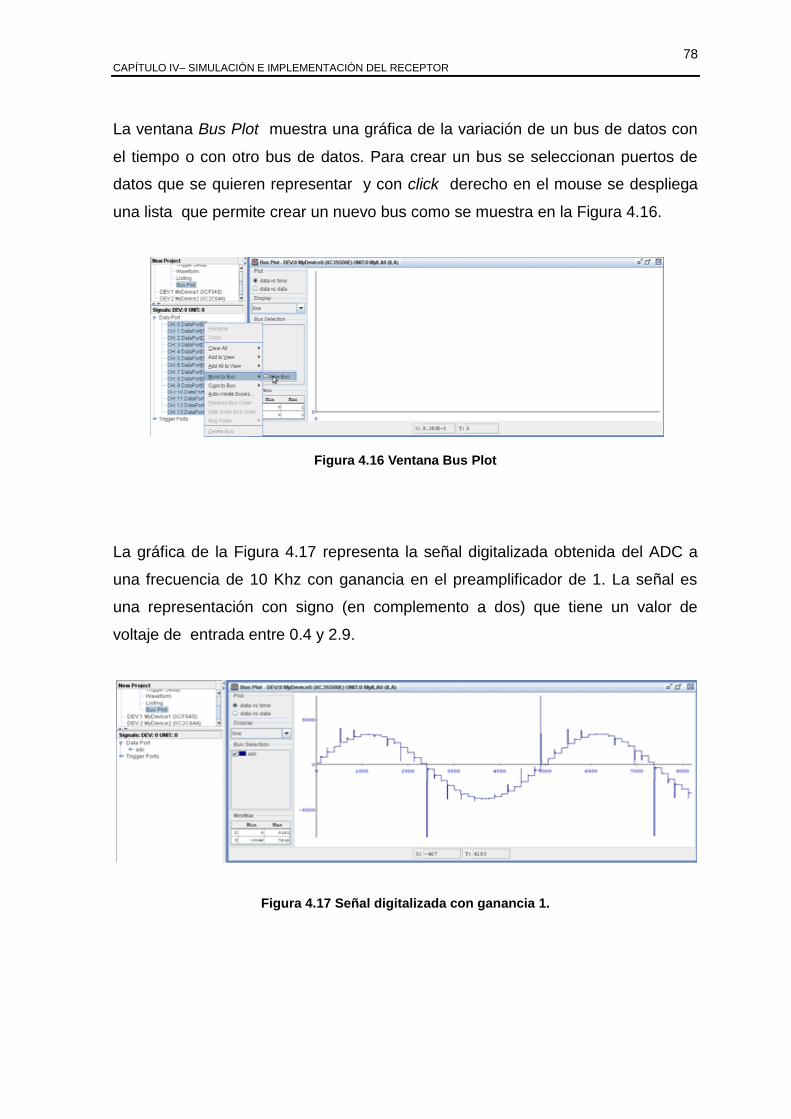
78 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
La ventana Bus Plot muestra una gráfica de la variación de un bus de datos con
el tiempo o con otro bus de datos. Para crear un bus se seleccionan puertos de
datos que se quieren representar y con click derecho en el mouse se despliega
una lista que permite crear un nuevo bus como se muestra en la Figura 4.16.
Figura 4.16 Ventana Bus Plot
La gráfica de la Figura 4.17 representa la señal digitalizada obtenida del ADC a
una frecuencia de 10 Khz con ganancia en el preamplificador de 1. La señal es
una representación con signo (en complemento a dos) que tiene un valor de
voltaje de entrada entre 0.4 y 2.9.
Figura 4.17 Señal digitalizada con ganancia 1.
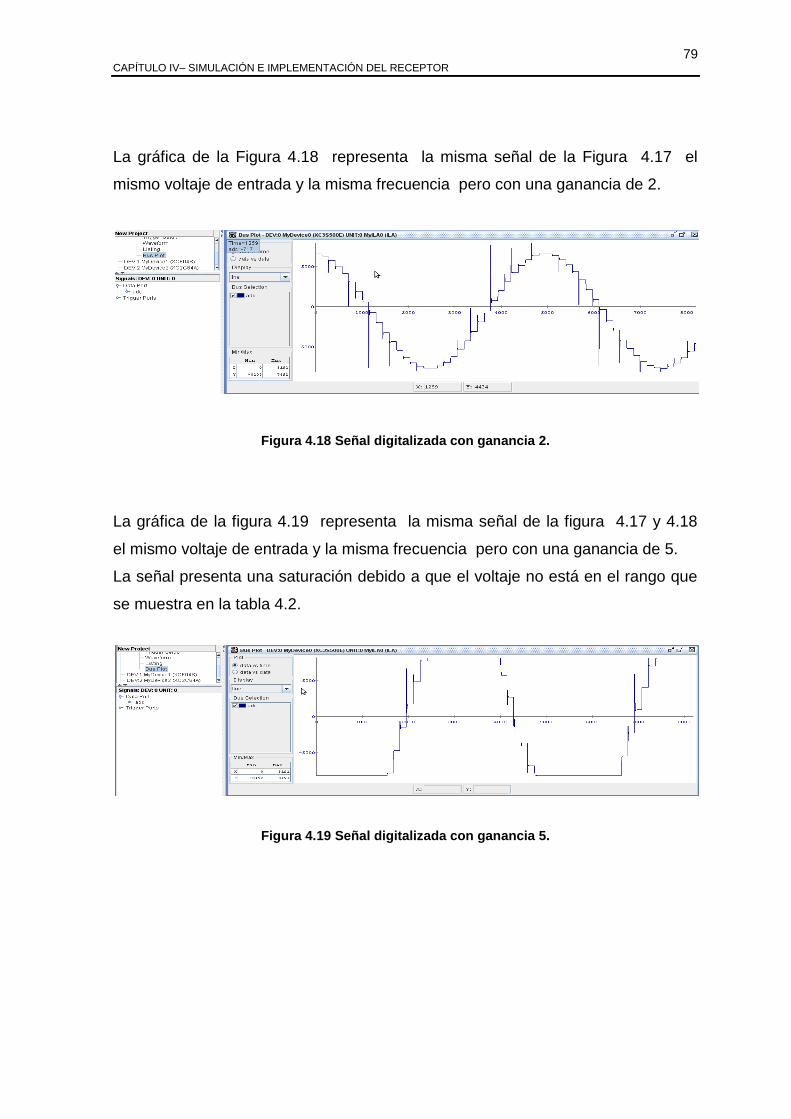
79 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
La gráfica de la Figura 4.18 representa la misma señal de la Figura 4.17 el
mismo voltaje de entrada y la misma frecuencia pero con una ganancia de 2.
Figura 4.18 Señal digitalizada con ganancia 2.
La gráfica de la figura 4.19 representa la misma señal de la figura 4.17 y 4.18
el mismo voltaje de entrada y la misma frecuencia pero con una ganancia de 5.
La señal presenta una saturación debido a que el voltaje no está en el rango que
se muestra en la tabla 4.2.
Figura 4.19 Señal digitalizada con ganancia 5.
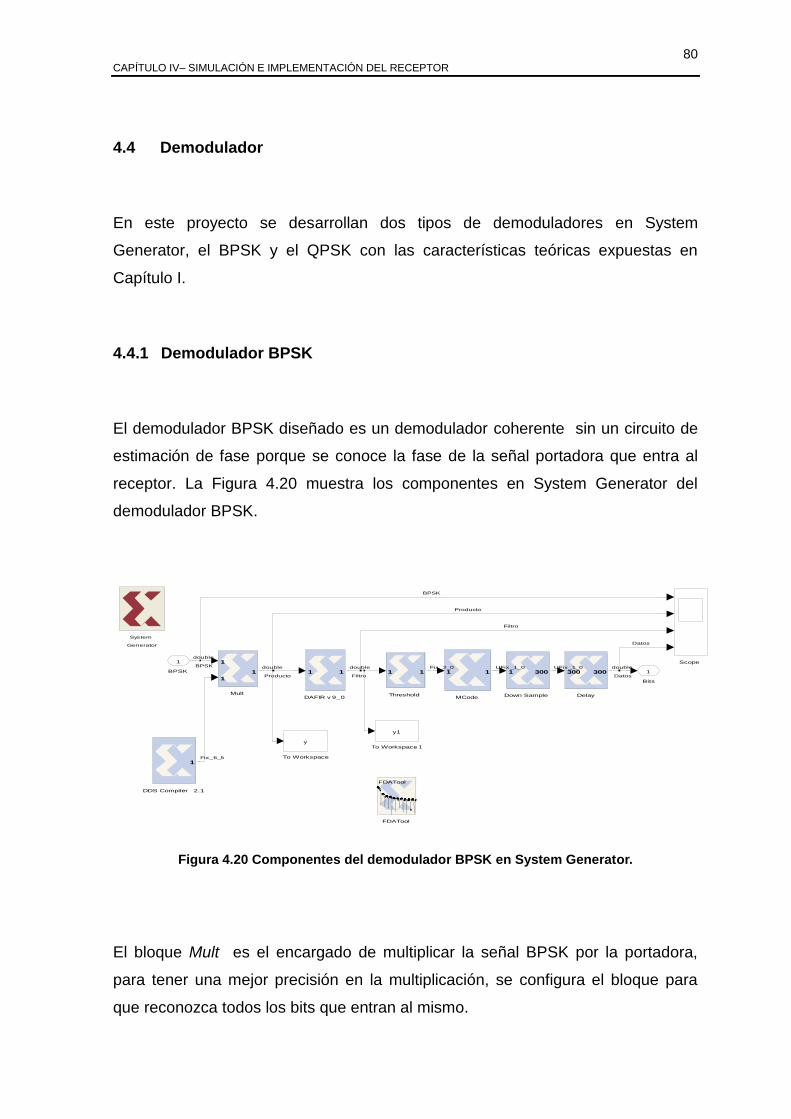
80 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
4.4 Demodulador
En este proyecto se desarrollan dos tipos de demoduladores en System
Generator, el BPSK y el QPSK con las características teóricas expuestas en
Capítulo I.
4.4.1 Demodulador BPSK
El demodulador BPSK diseñado es un demodulador coherente sin un circuito de
estimación de fase porque se conoce la fase de la señal portadora que entra al
receptor. La Figura 4.20 muestra los componentes en System Generator del
demodulador BPSK.
Figura 4.20 Componentes del demodulador BPSK en System Generator.
El bloque Mult es el encargado de multiplicar la señal BPSK por la portadora,
para tener una mejor precisión en la multiplicación, se configura el bloque para
que reconozca todos los bits que entran al mismo.
Bits
1
To Workspace 1
y1
To Workspace
y
Threshold
1 1
Scope
Mult
1
1
1
MCode
1 1
FDATool
FDATool
Down Sample
1 300
Delay
300 300
DDS Compiler 2.1
1
DAFIR v 9_0
1 1
System
Generator
BPSK
1
Fix_6_5
Producto
double
Producto
UFix _1_0Fix_2_0
Filtro
double
Filtro
BPSK
double
BPSK UFix_1_0
Datos
double
Datos
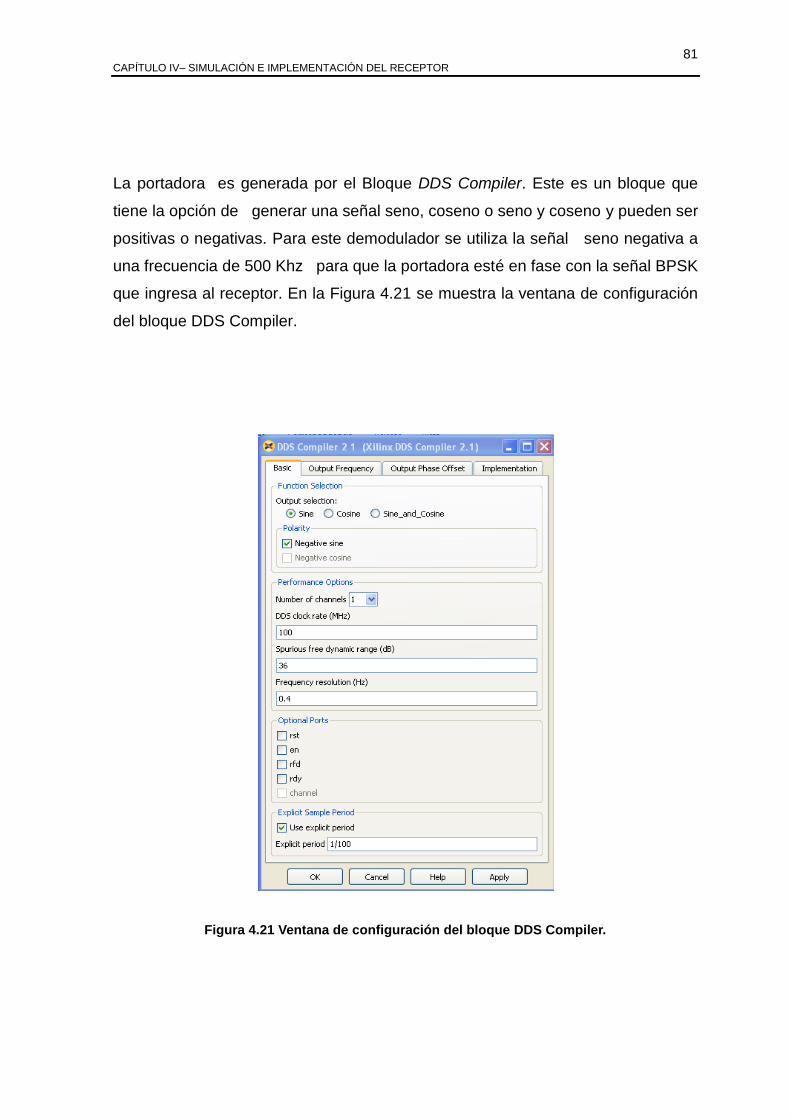
81 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
La portadora es generada por el Bloque DDS Compiler. Este es un bloque que
tiene la opción de generar una señal seno, coseno o seno y coseno y pueden ser
positivas o negativas. Para este demodulador se utiliza la señal seno negativa a
una frecuencia de 500 Khz para que la portadora esté en fase con la señal BPSK
que ingresa al receptor. En la Figura 4.21 se muestra la ventana de configuración
del bloque DDS Compiler.
Figura 4.21 Ventana de configuración del bloque DDS Compiler.
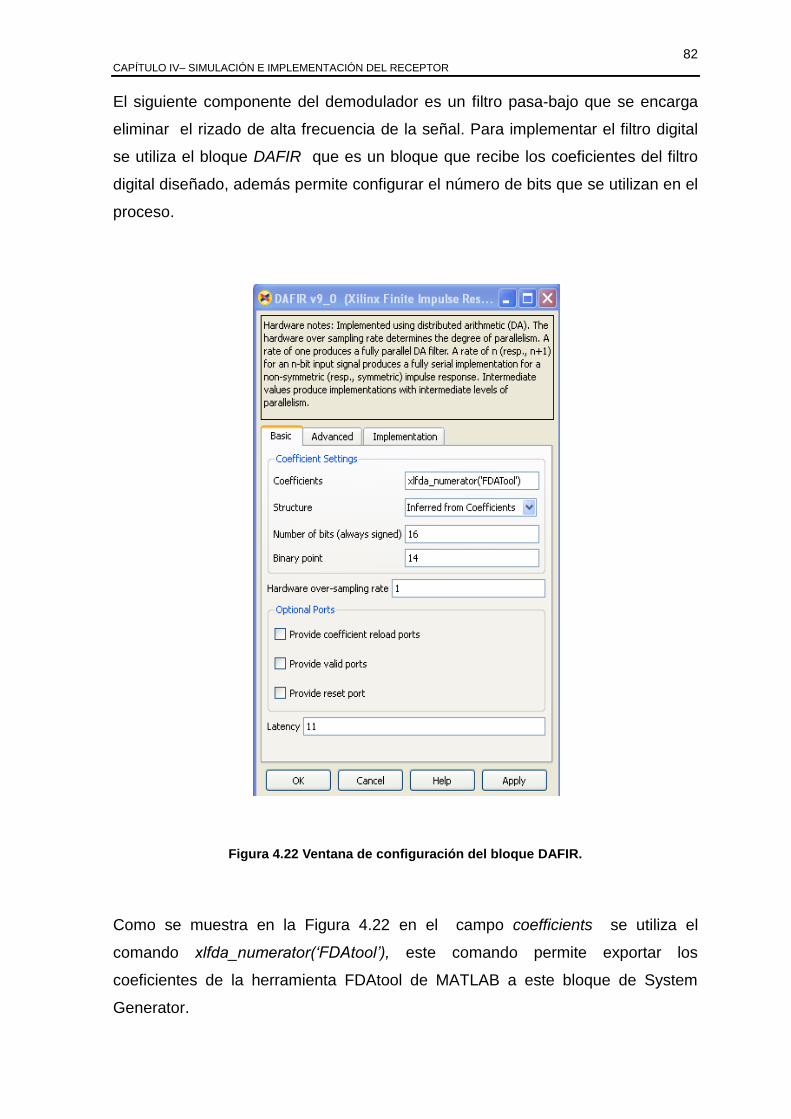
82 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
El siguiente componente del demodulador es un filtro pasa-bajo que se encarga
eliminar el rizado de alta frecuencia de la señal. Para implementar el filtro digital
se utiliza el bloque DAFIR que es un bloque que recibe los coeficientes del filtro
digital diseñado, además permite configurar el número de bits que se utilizan en el
proceso.
Figura 4.22 Ventana de configuración del bloque DAFIR.
Como se muestra en la Figura 4.22 en el campo coefficients se utiliza el
comando xlfda_numerator(„FDAtool‟), este comando permite exportar los
coeficientes de la herramienta FDAtool de MATLAB a este bloque de System
Generator.
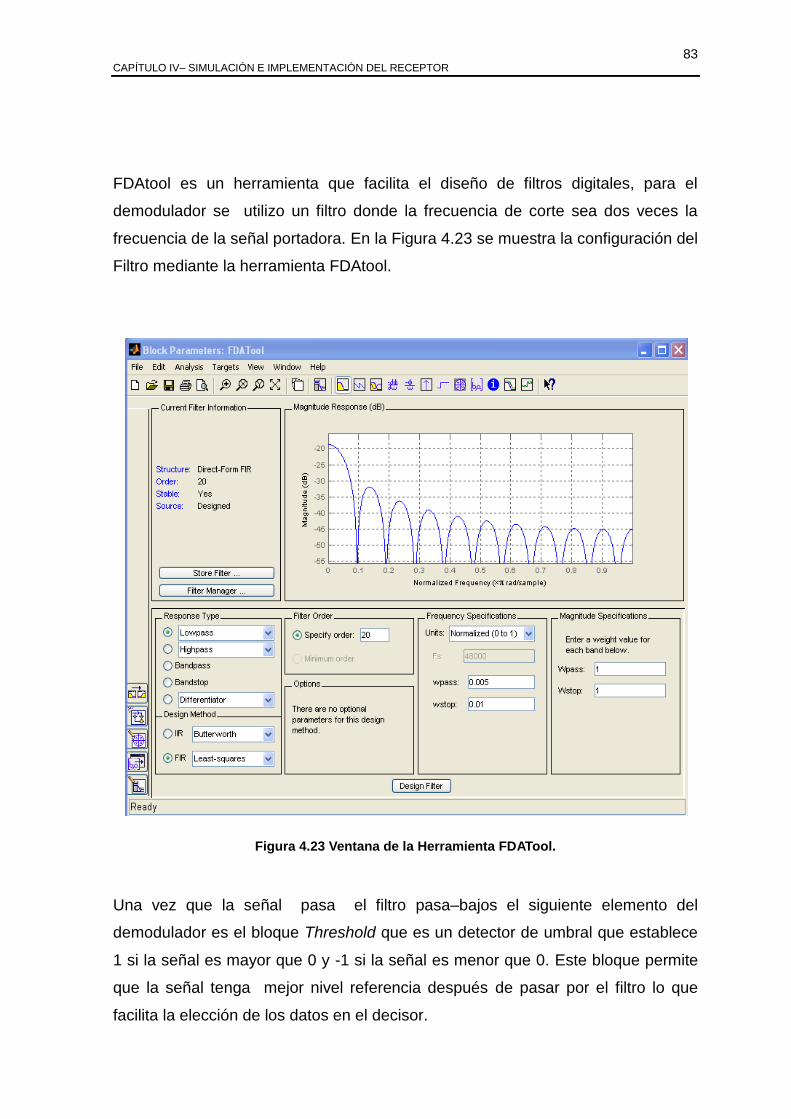
83 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
FDAtool es un herramienta que facilita el diseño de filtros digitales, para el
demodulador se utilizo un filtro donde la frecuencia de corte sea dos veces la
frecuencia de la señal portadora. En la Figura 4.23 se muestra la configuración del
Filtro mediante la herramienta FDAtool.
Figura 4.23 Ventana de la Herramienta FDATool.
Una vez que la señal pasa el filtro pasa–bajos el siguiente elemento del
demodulador es el bloque Threshold que es un detector de umbral que establece
1 si la señal es mayor que 0 y -1 si la señal es menor que 0. Este bloque permite
que la señal tenga mejor nivel referencia después de pasar por el filtro lo que
facilita la elección de los datos en el decisor.
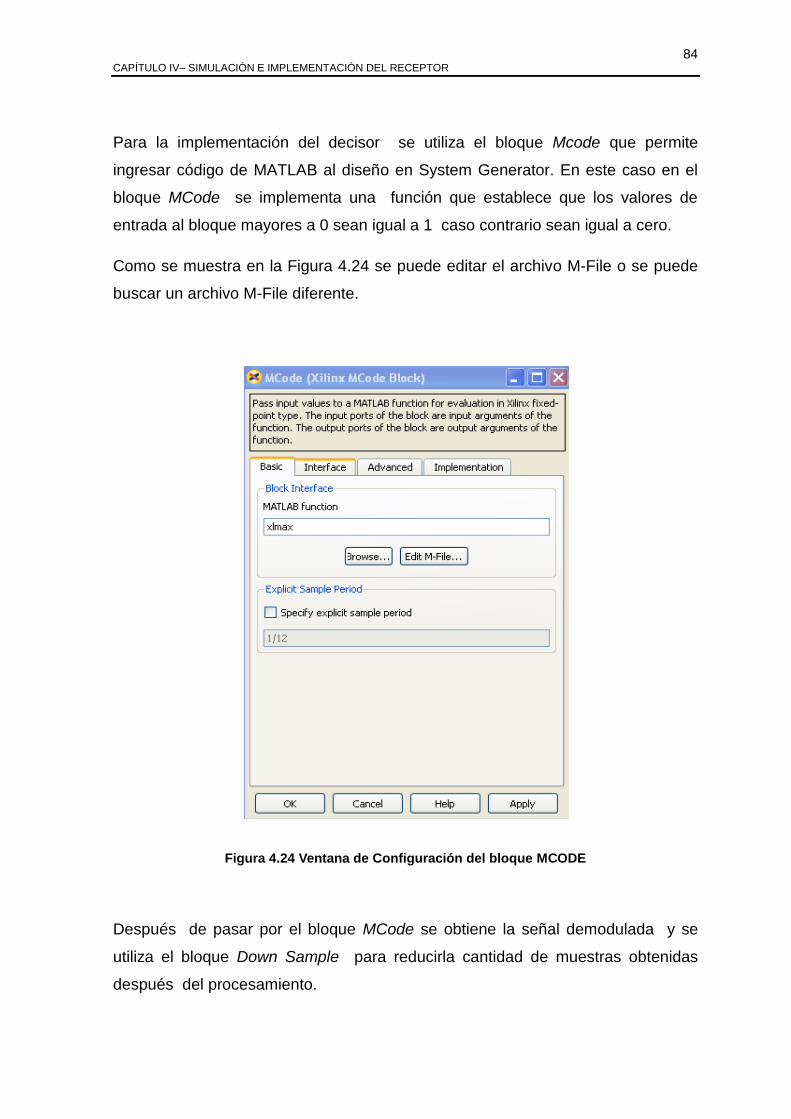
84 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
Para la implementación del decisor se utiliza el bloque Mcode que permite
ingresar código de MATLAB al diseño en System Generator. En este caso en el
bloque MCode se implementa una función que establece que los valores de
entrada al bloque mayores a 0 sean igual a 1 caso contrario sean igual a cero.
Como se muestra en la Figura 4.24 se puede editar el archivo M-File o se puede
buscar un archivo M-File diferente.
Figura 4.24 Ventana de Configuración del bloque MCODE
Después de pasar por el bloque MCode se obtiene la señal demodulada y se
utiliza el bloque Down Sample para reducirla cantidad de muestras obtenidas
después del procesamiento.
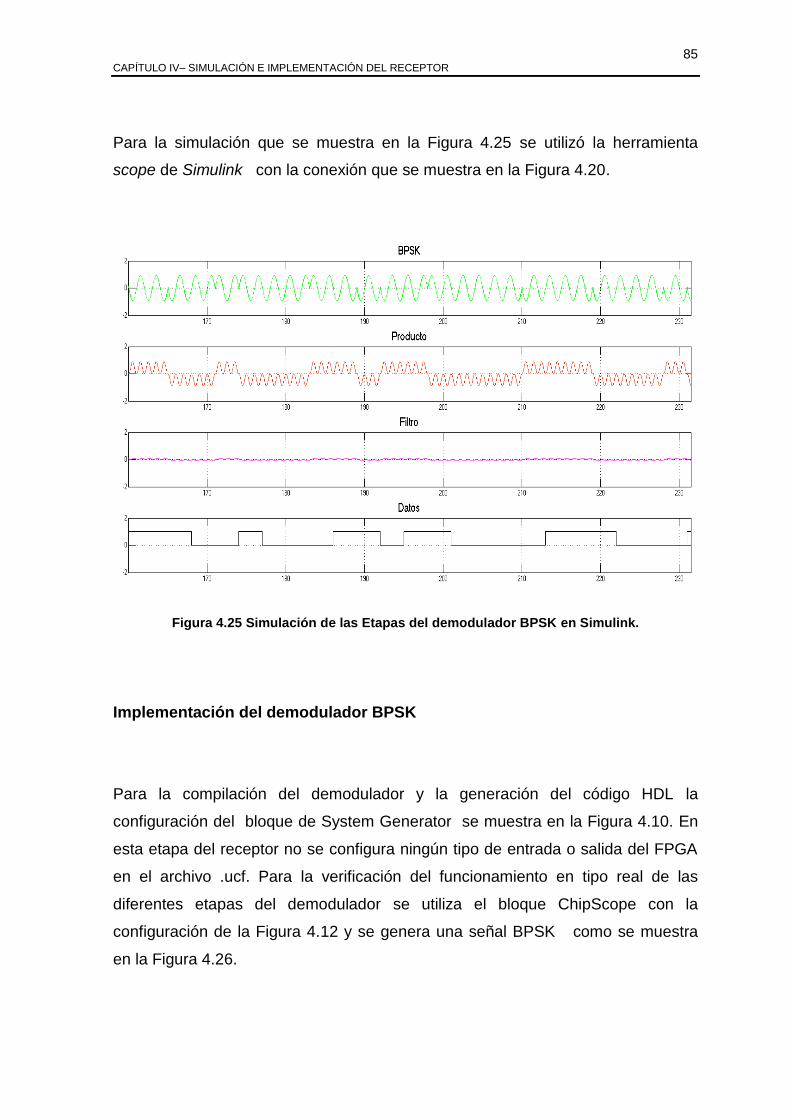
85 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
Para la simulación que se muestra en la Figura 4.25 se utilizó la herramienta
scope de Simulink con la conexión que se muestra en la Figura 4.20.
Figura 4.25 Simulación de las Etapas del demodulador BPSK en Simulink.
Implementación del demodulador BPSK
Para la compilación del demodulador y la generación del código HDL la
configuración del bloque de System Generator se muestra en la Figura 4.10. En
esta etapa del receptor no se configura ningún tipo de entrada o salida del FPGA
en el archivo .ucf. Para la verificación del funcionamiento en tipo real de las
diferentes etapas del demodulador se utiliza el bloque ChipScope con la
configuración de la Figura 4.12 y se genera una señal BPSK como se muestra
en la Figura 4.26.
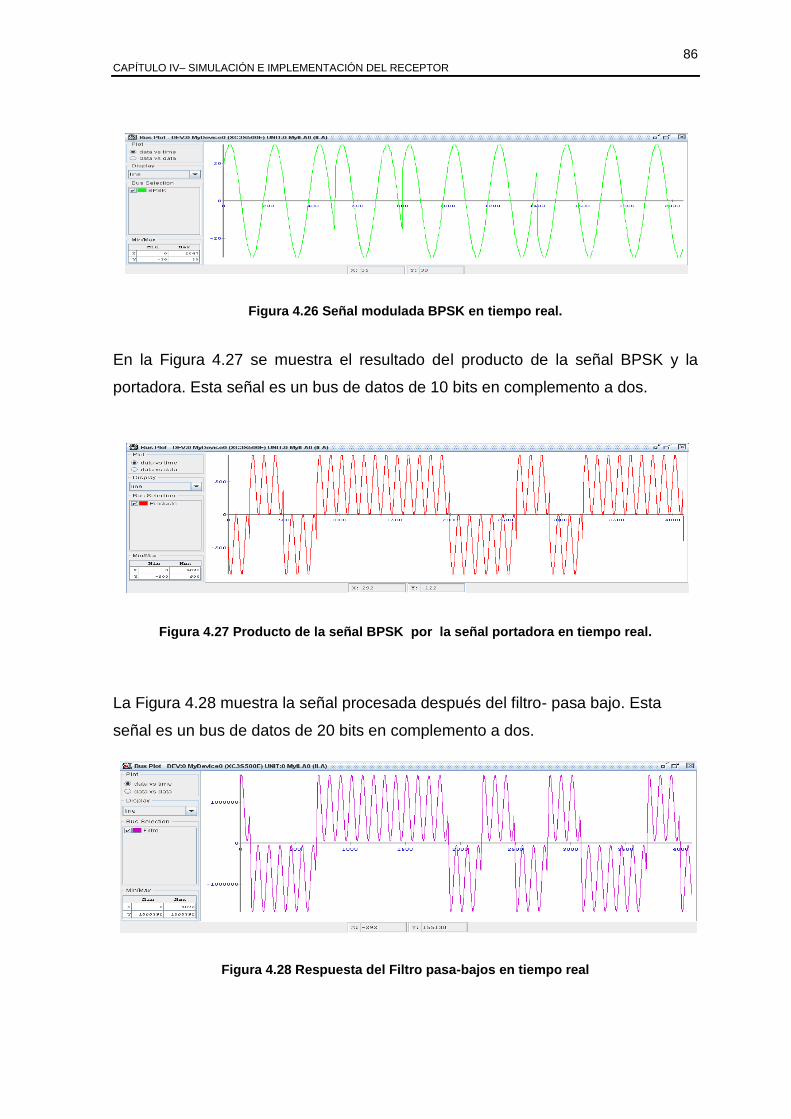
86 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
Figura 4.26 Señal modulada BPSK en tiempo real.
En la Figura 4.27 se muestra el resultado del producto de la señal BPSK y la
portadora. Esta señal es un bus de datos de 10 bits en complemento a dos.
Figura 4.27 Producto de la señal BPSK por la señal portadora en tiempo real.
La Figura 4.28 muestra la señal procesada después del filtro- pasa bajo. Esta
señal es un bus de datos de 20 bits en complemento a dos.
Figura 4.28 Respuesta del Filtro pasa-bajos en tiempo real
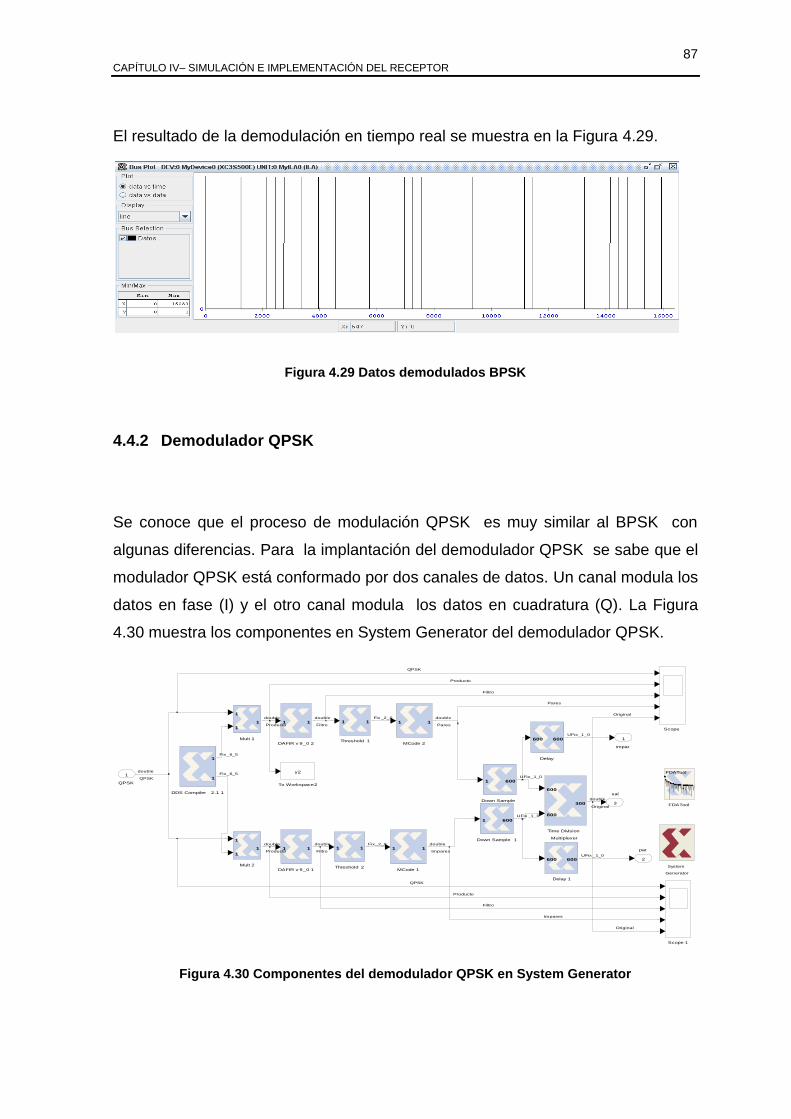
87 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
El resultado de la demodulación en tiempo real se muestra en la Figura 4.29.
Figura 4.29 Datos demodulados BPSK
4.4.2 Demodulador QPSK
Se conoce que el proceso de modulación QPSK es muy similar al BPSK con
algunas diferencias. Para la implantación del demodulador QPSK se sabe que el
modulador QPSK está conformado por dos canales de datos. Un canal modula los
datos en fase (I) y el otro canal modula los datos en cuadratura (Q). La Figura
4.30 muestra los componentes en System Generator del demodulador QPSK.
Figura 4.30 Componentes del demodulador QPSK en System Generator
sal
3
par
2
impar
1
To Workspace2
y2
Time Division
Multiplexer
600
600
300
Threshold 2
1 1
Threshold 1
1 1
Scope 1
Scope
Mult 2
1
1
1
Mult 1
1
1
1
MCode 2
1 1
MCode 1
1 1
FDATool
FDATool
Down Sample 1
1 600
Down Sample
1 600
Delay 1
600 600
Delay
600 600
DDS Compiler 2.1 1
1
1
DAFIR v 9_0 2
1 1
DAFIR v 9_0 1
1 1
System
Generator
QPSK
1
Producto
double
Producto
Producto
double
Producto
QPSK
QPSK
double
QPSK
Fix_6_5
Fix_6_5
Filtro
double
Filtro
Fix _2_0
Fix_2_0
Pares
double
Pares
Impares
double
Impares
Filtro
double
Filtro
Original
Original
double
Original
UFix_1_0
UFix _1_0
UFix _1_0
UFix _1_0
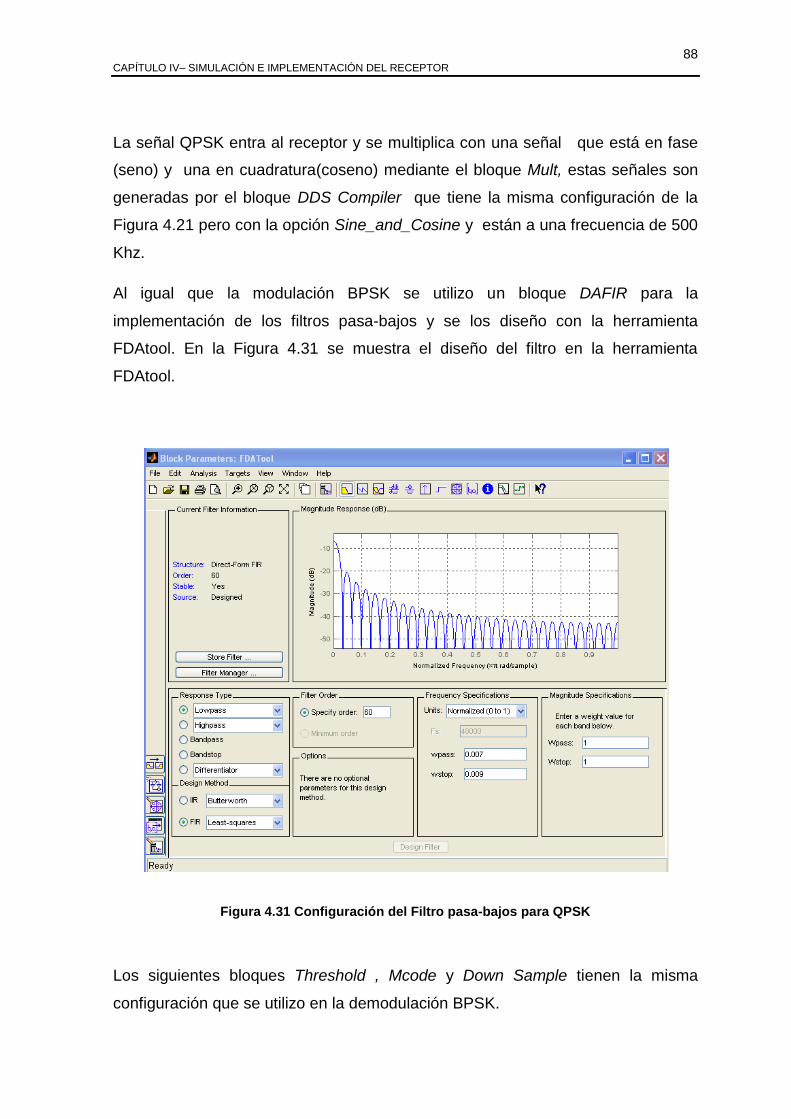
88 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
La señal QPSK entra al receptor y se multiplica con una señal que está en fase
(seno) y una en cuadratura(coseno) mediante el bloque Mult, estas señales son
generadas por el bloque DDS Compiler que tiene la misma configuración de la
Figura 4.21 pero con la opción Sine_and_Cosine y están a una frecuencia de 500
Khz.
Al igual que la modulación BPSK se utilizo un bloque DAFIR para la
implementación de los filtros pasa-bajos y se los diseño con la herramienta
FDAtool. En la Figura 4.31 se muestra el diseño del filtro en la herramienta
FDAtool.
Figura 4.31 Configuración del Filtro pasa-bajos para QPSK
Los siguientes bloques Threshold , Mcode y Down Sample tienen la misma
configuración que se utilizo en la demodulación BPSK.
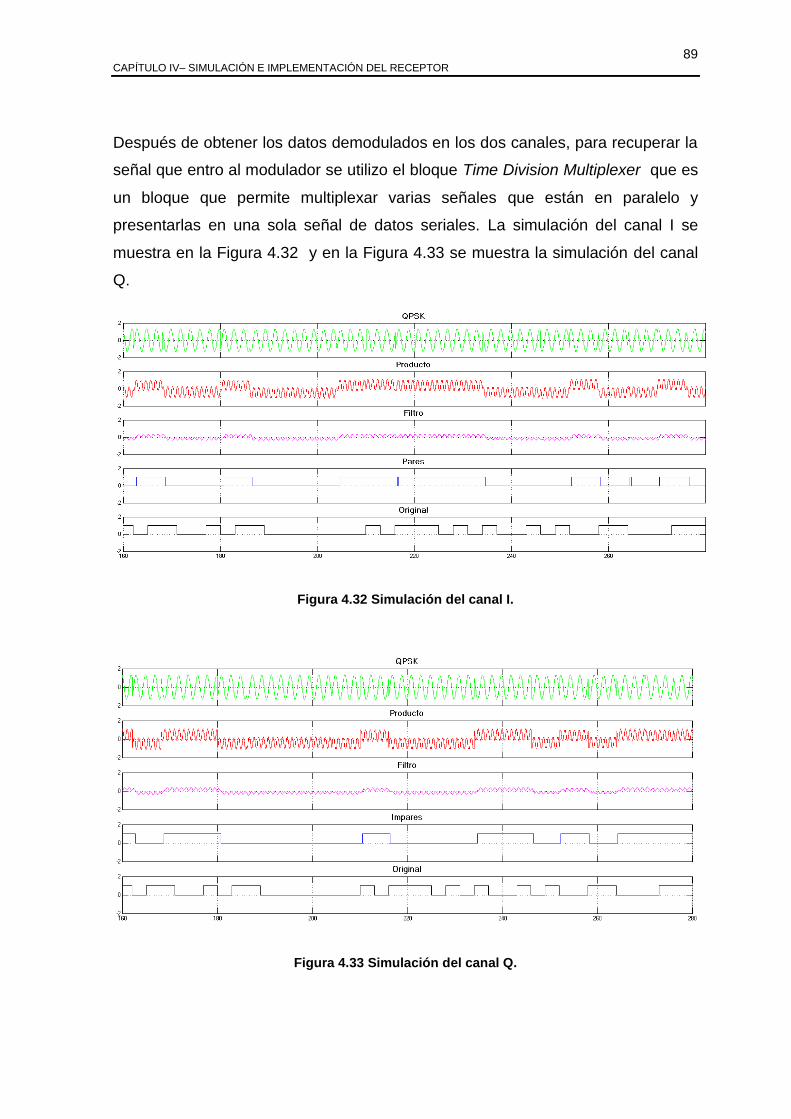
89 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
Después de obtener los datos demodulados en los dos canales, para recuperar la
señal que entro al modulador se utilizo el bloque Time Division Multiplexer que es
un bloque que permite multiplexar varias señales que están en paralelo y
presentarlas en una sola señal de datos seriales. La simulación del canal I se
muestra en la Figura 4.32 y en la Figura 4.33 se muestra la simulación del canal
Q.
Figura 4.32 Simulación del canal I.
Figura 4.33 Simulación del canal Q.
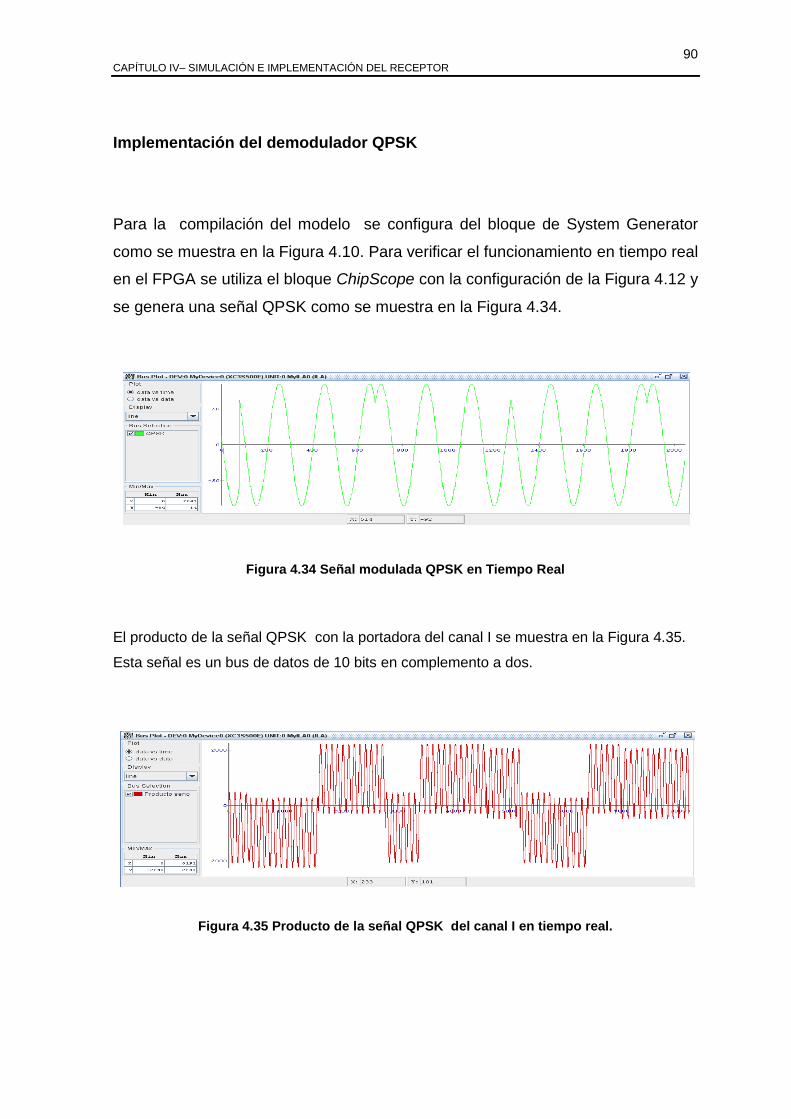
90 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
Implementación del demodulador QPSK
Para la compilación del modelo se configura del bloque de System Generator
como se muestra en la Figura 4.10. Para verificar el funcionamiento en tiempo real
en el FPGA se utiliza el bloque ChipScope con la configuración de la Figura 4.12 y
se genera una señal QPSK como se muestra en la Figura 4.34.
Figura 4.34 Señal modulada QPSK en Tiempo Real
El producto de la señal QPSK con la portadora del canal I se muestra en la Figura 4.35.
Esta señal es un bus de datos de 10 bits en complemento a dos.
Figura 4.35 Producto de la señal QPSK del canal I en tiempo real.
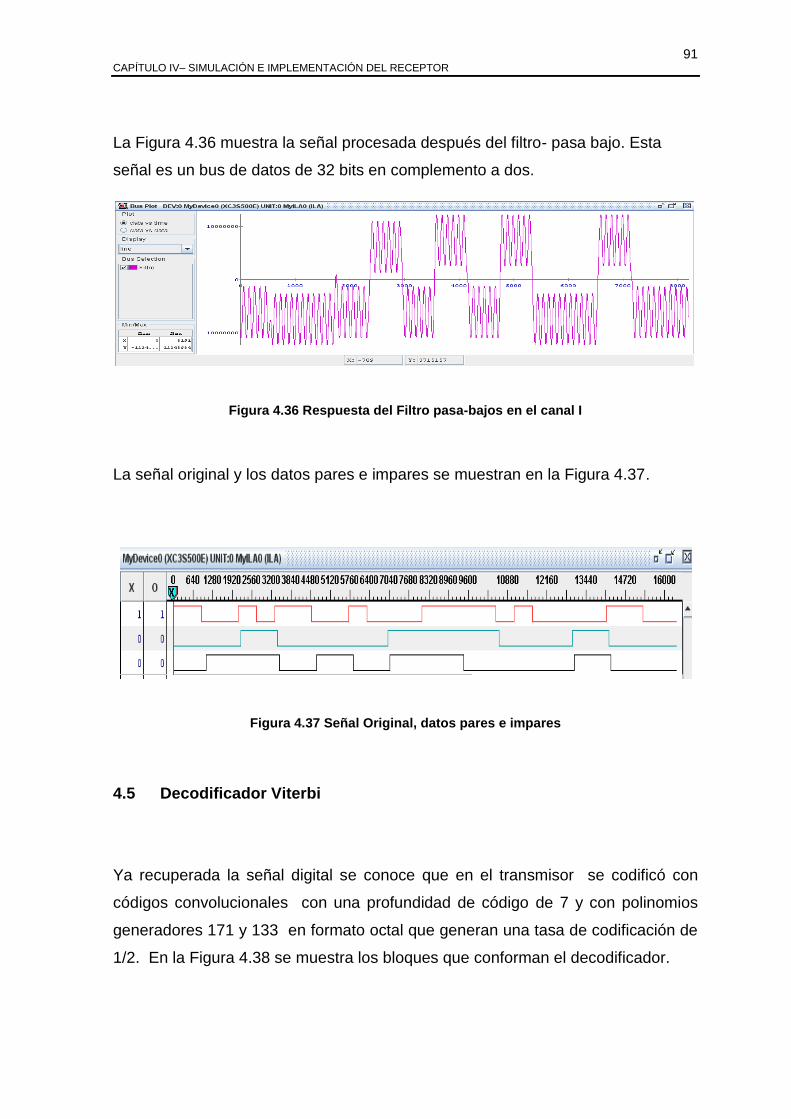
91 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
La Figura 4.36 muestra la señal procesada después del filtro- pasa bajo. Esta
señal es un bus de datos de 32 bits en complemento a dos.
Figura 4.36 Respuesta del Filtro pasa-bajos en el canal I
La señal original y los datos pares e impares se muestran en la Figura 4.37.
Figura 4.37 Señal Original, datos pares e impares
4.5 Decodificador Viterbi
Ya recuperada la señal digital se conoce que en el transmisor se codificó con
códigos convolucionales con una profundidad de código de 7 y con polinomios
generadores 171 y 133 en formato octal que generan una tasa de codificación de
1/2. En la Figura 4.38 se muestra los bloques que conforman el decodificador.
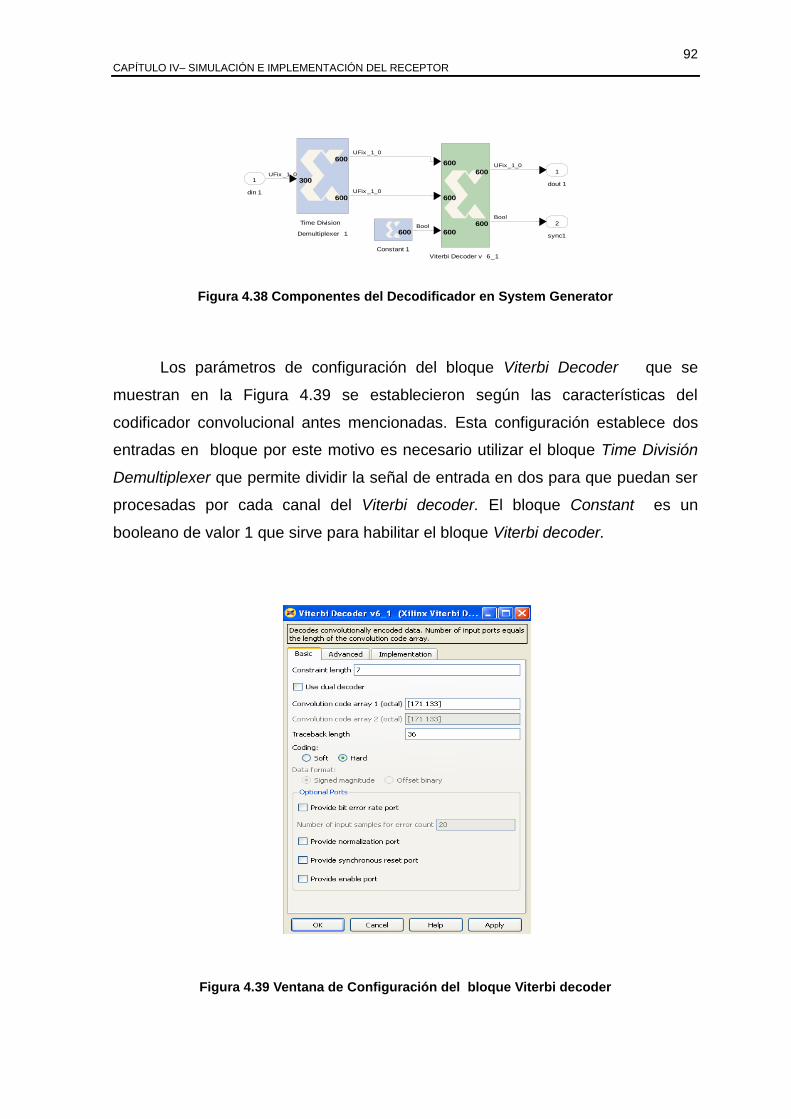
92 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
Figura 4.38 Componentes del Decodificador en System Generator
Los parámetros de configuración del bloque Viterbi Decoder que se
muestran en la Figura 4.39 se establecieron según las características del
codificador convolucional antes mencionadas. Esta configuración establece dos
entradas en bloque por este motivo es necesario utilizar el bloque Time División
Demultiplexer que permite dividir la señal de entrada en dos para que puedan ser
procesadas por cada canal del Viterbi decoder. El bloque Constant es un
booleano de valor 1 que sirve para habilitar el bloque Viterbi decoder.
Figura 4.39 Ventana de Configuración del bloque Viterbi decoder
sync1
2
dout 1
1
Viterbi Decoder v 6_1
600
600
600
600
600Time Division
Demultiplexer 1
300
600
600
Constant 1
600
din 1
1
UFix_1_0
Bool
UFix _1_0
UFix _1_0
UFix _1_0
Bool

93 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
Para la decodificación se utilizó Hard-Decision porque después del
proceso de demodulación la señal está compuesta por un solo bit que hace más
sencillo el proceso de estimación del dato. Además Hard-Decision utiliza menos
rescursos del FPGA.
El valor de profundidad de rastreo (Traceback length) es 36 porque es un valor
que permite un menor retraso en la decodificación, sin modificar el correcto
funcionamiento del decodificador. La simulación de la Figura 4.40 muestra el
desempeño del decodificador Viterbi en el receptor.
Figura 4.40 Señal original, señal demodulada, señal decodificada del sistema.
Implementación del decodificador Viterbi
Al igual que las otras etapas del receptor para verificar el funcionamiento de
este elemento se configura del bloque de System Generator como se muestra en
la Figura 4.10 con la diferencia de que en este punto de la implementación ya
participan todos los componentes antes mencionados en el desempeño del
decodificador implementado en el FPGA.
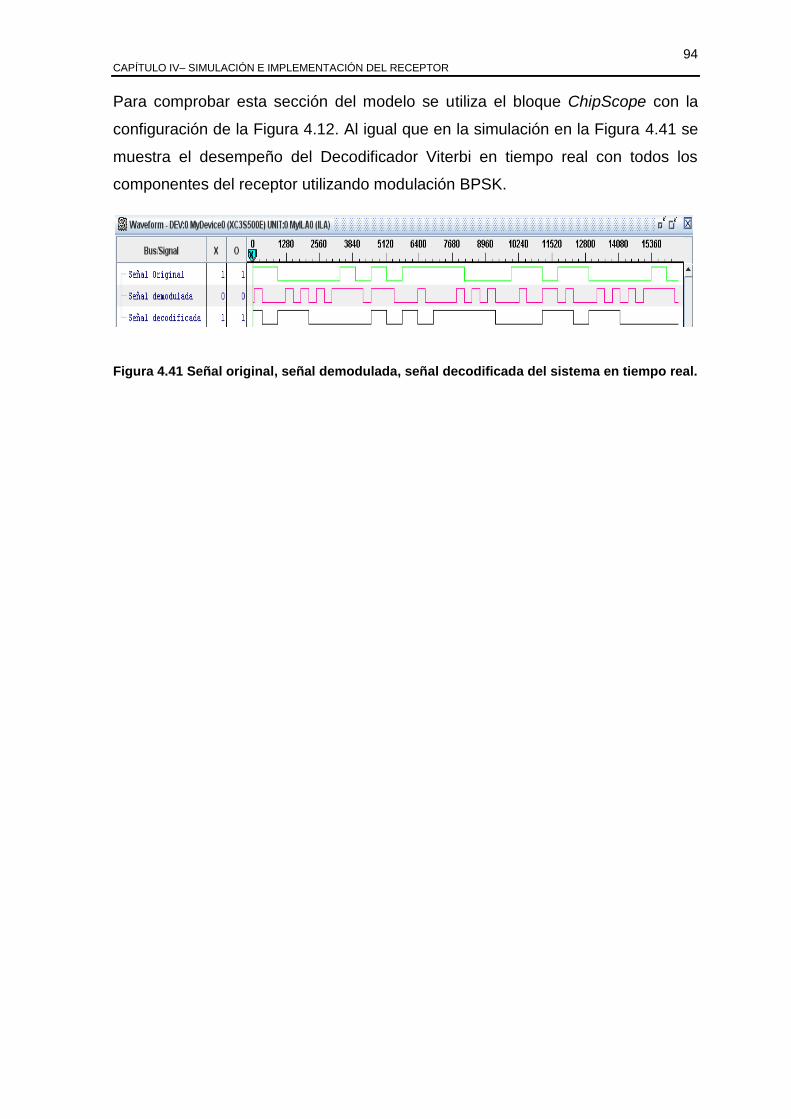
94 CAPÍTULO IV– SIMULACIÓN E IMPLEMENTACIÓN DEL RECEPTOR
Para comprobar esta sección del modelo se utiliza el bloque ChipScope con la
configuración de la Figura 4.12. Al igual que en la simulación en la Figura 4.41 se
muestra el desempeño del Decodificador Viterbi en tiempo real con todos los
componentes del receptor utilizando modulación BPSK.
Figura 4.41 Señal original, señal demodulada, señal decodificada del sistema en tiempo real.
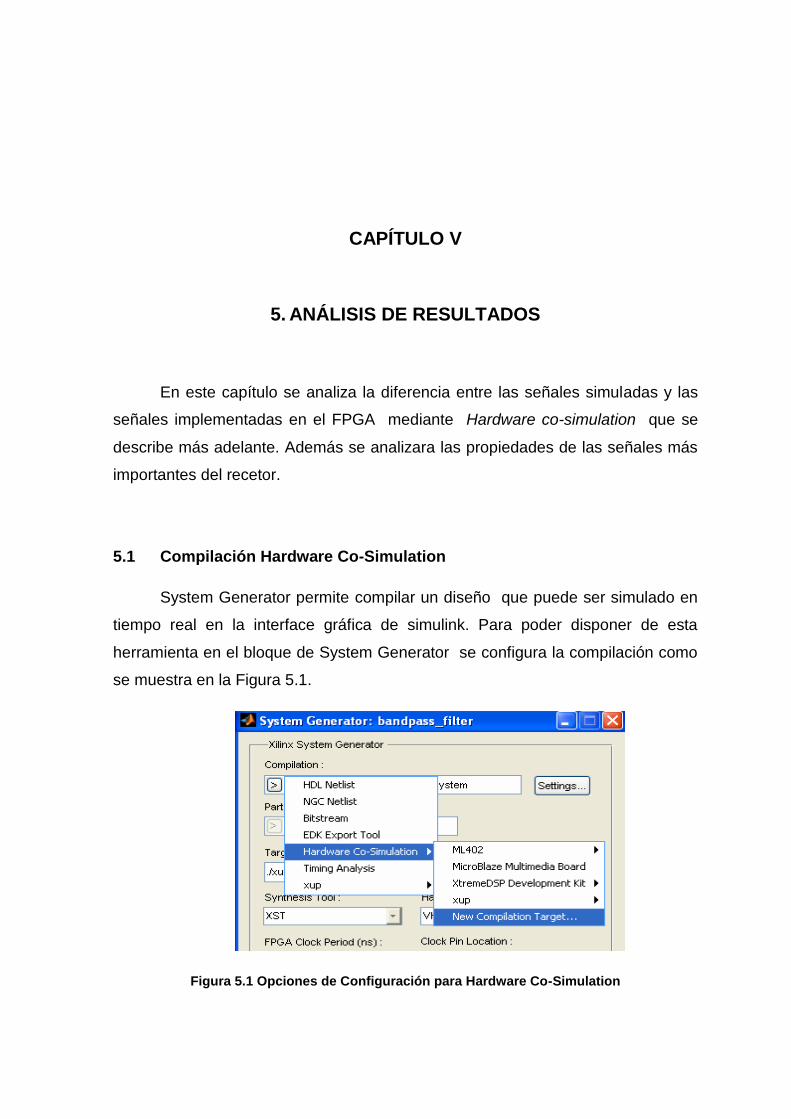
CAPÍTULO V
5. ANÁLISIS DE RESULTADOS
En este capítulo se analiza la diferencia entre las señales simuladas y las
señales implementadas en el FPGA mediante Hardware co-simulation que se
describe más adelante. Además se analizara las propiedades de las señales más
importantes del recetor.
5.1 Compilación Hardware Co-Simulation
System Generator permite compilar un diseño que puede ser simulado en
tiempo real en la interface gráfica de simulink. Para poder disponer de esta
herramienta en el bloque de System Generator se configura la compilación como
se muestra en la Figura 5.1.
Figura 5.1 Opciones de Configuración para Hardware Co-Simulation
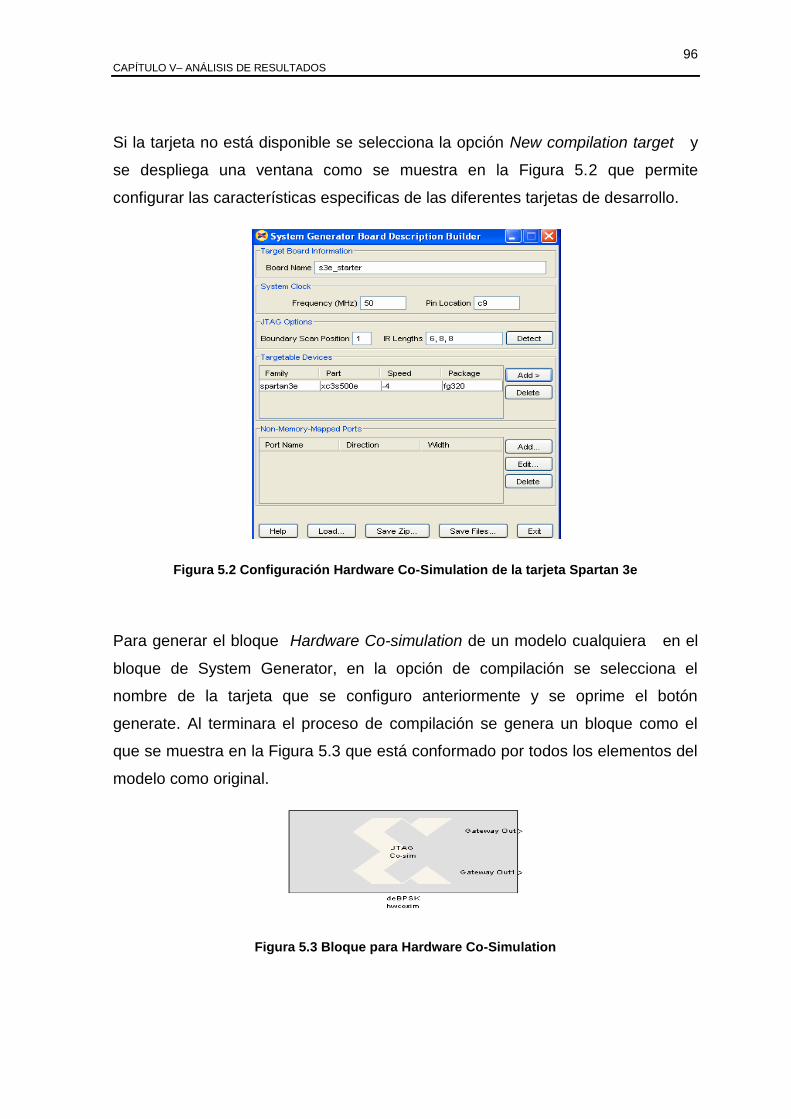
96 CAPÍTULO V– ANÁLISIS DE RESULTADOS
Si la tarjeta no está disponible se selecciona la opción New compilation target y
se despliega una ventana como se muestra en la Figura 5.2 que permite
configurar las características especificas de las diferentes tarjetas de desarrollo.
Figura 5.2 Configuración Hardware Co-Simulation de la tarjeta Spartan 3e
Para generar el bloque Hardware Co-simulation de un modelo cualquiera en el
bloque de System Generator, en la opción de compilación se selecciona el
nombre de la tarjeta que se configuro anteriormente y se oprime el botón
generate. Al terminara el proceso de compilación se genera un bloque como el
que se muestra en la Figura 5.3 que está conformado por todos los elementos del
modelo como original.
Figura 5.3 Bloque para Hardware Co-Simulation
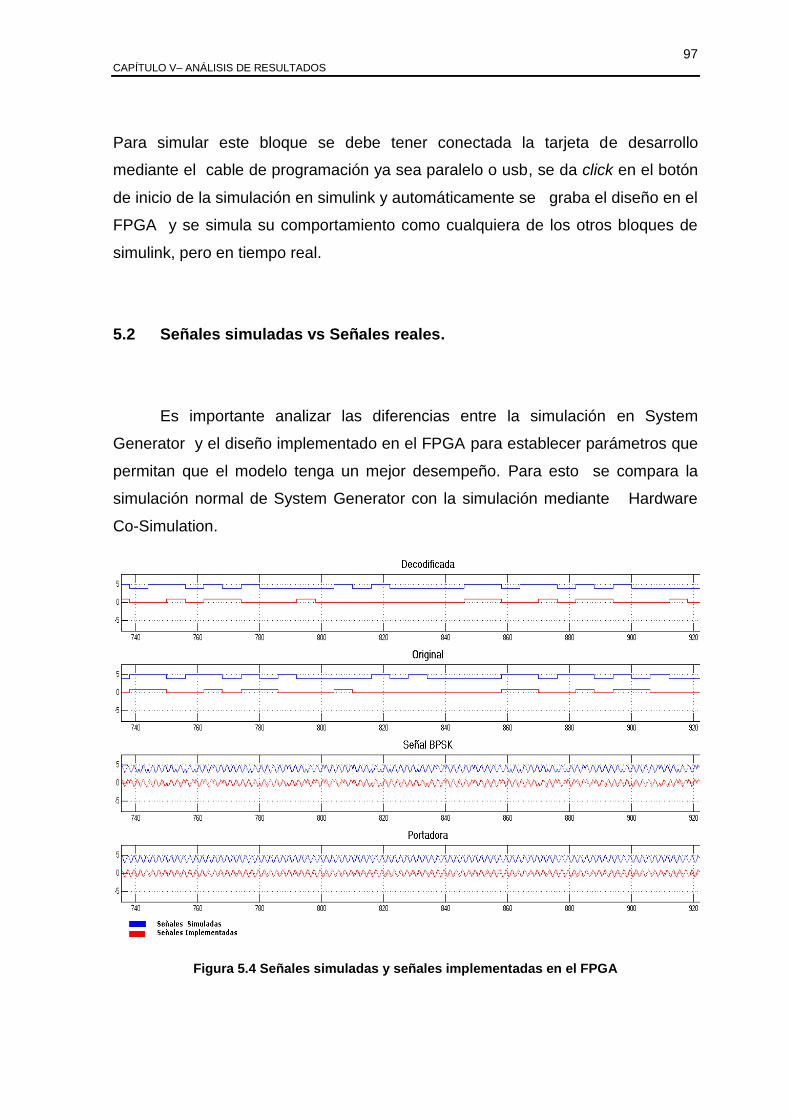
97 CAPÍTULO V– ANÁLISIS DE RESULTADOS
Para simular este bloque se debe tener conectada la tarjeta de desarrollo
mediante el cable de programación ya sea paralelo o usb, se da click en el botón
de inicio de la simulación en simulink y automáticamente se graba el diseño en el
FPGA y se simula su comportamiento como cualquiera de los otros bloques de
simulink, pero en tiempo real.
5.2 Señales simuladas vs Señales reales.
Es importante analizar las diferencias entre la simulación en System
Generator y el diseño implementado en el FPGA para establecer parámetros que
permitan que el modelo tenga un mejor desempeño. Para esto se compara la
simulación normal de System Generator con la simulación mediante Hardware
Co-Simulation.
Figura 5.4 Señales simuladas y señales implementadas en el FPGA
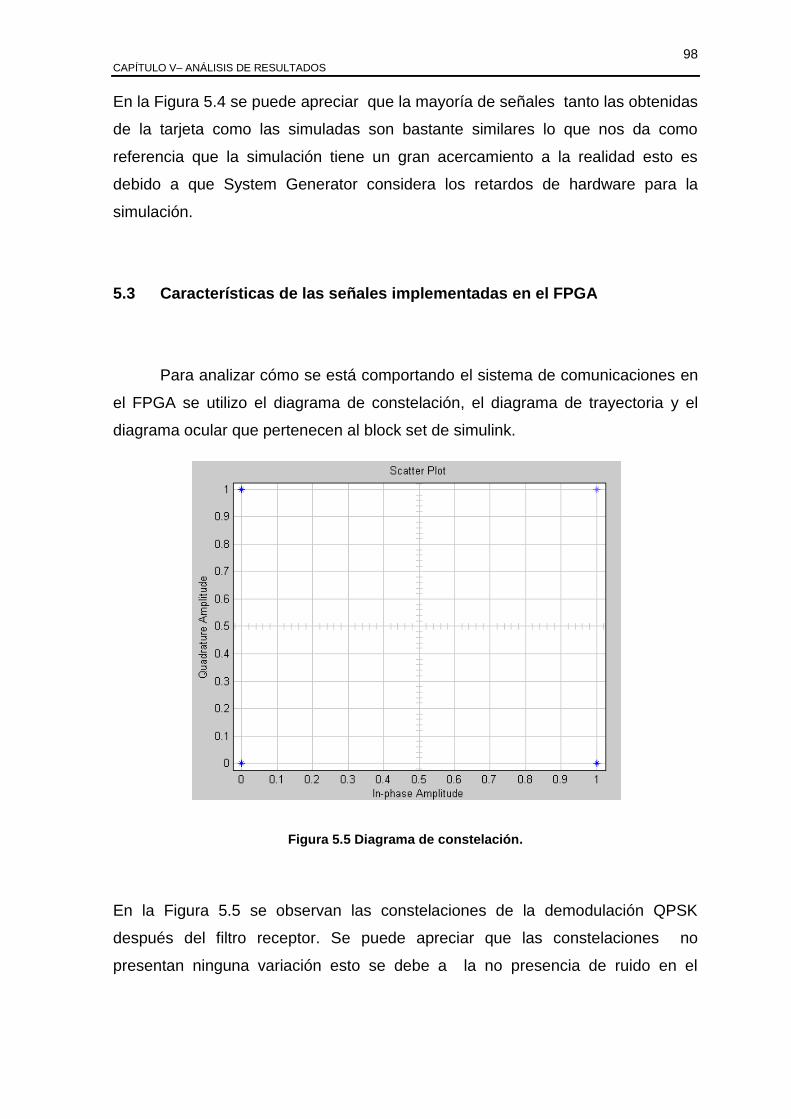
98 CAPÍTULO V– ANÁLISIS DE RESULTADOS
En la Figura 5.4 se puede apreciar que la mayoría de señales tanto las obtenidas
de la tarjeta como las simuladas son bastante similares lo que nos da como
referencia que la simulación tiene un gran acercamiento a la realidad esto es
debido a que System Generator considera los retardos de hardware para la
simulación.
5.3 Características de las señales implementadas en el FPGA
Para analizar cómo se está comportando el sistema de comunicaciones en
el FPGA se utilizo el diagrama de constelación, el diagrama de trayectoria y el
diagrama ocular que pertenecen al block set de simulink.
Figura 5.5 Diagrama de constelación.
En la Figura 5.5 se observan las constelaciones de la demodulación QPSK
después del filtro receptor. Se puede apreciar que las constelaciones no
presentan ninguna variación esto se debe a la no presencia de ruido en el
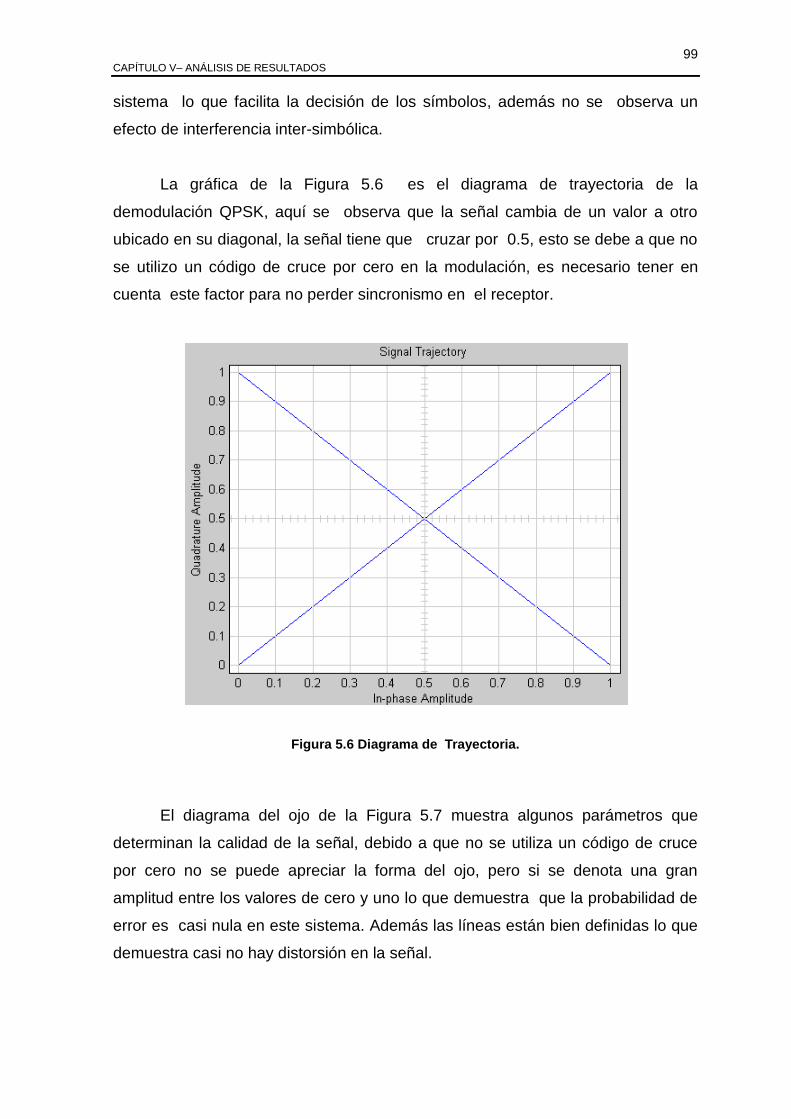
99 CAPÍTULO V– ANÁLISIS DE RESULTADOS
sistema lo que facilita la decisión de los símbolos, además no se observa un
efecto de interferencia inter-simbólica.
La gráfica de la Figura 5.6 es el diagrama de trayectoria de la
demodulación QPSK, aquí se observa que la señal cambia de un valor a otro
ubicado en su diagonal, la señal tiene que cruzar por 0.5, esto se debe a que no
se utilizo un código de cruce por cero en la modulación, es necesario tener en
cuenta este factor para no perder sincronismo en el receptor.
Figura 5.6 Diagrama de Trayectoria.
El diagrama del ojo de la Figura 5.7 muestra algunos parámetros que
determinan la calidad de la señal, debido a que no se utiliza un código de cruce
por cero no se puede apreciar la forma del ojo, pero si se denota una gran
amplitud entre los valores de cero y uno lo que demuestra que la probabilidad de
error es casi nula en este sistema. Además las líneas están bien definidas lo que
demuestra casi no hay distorsión en la señal.
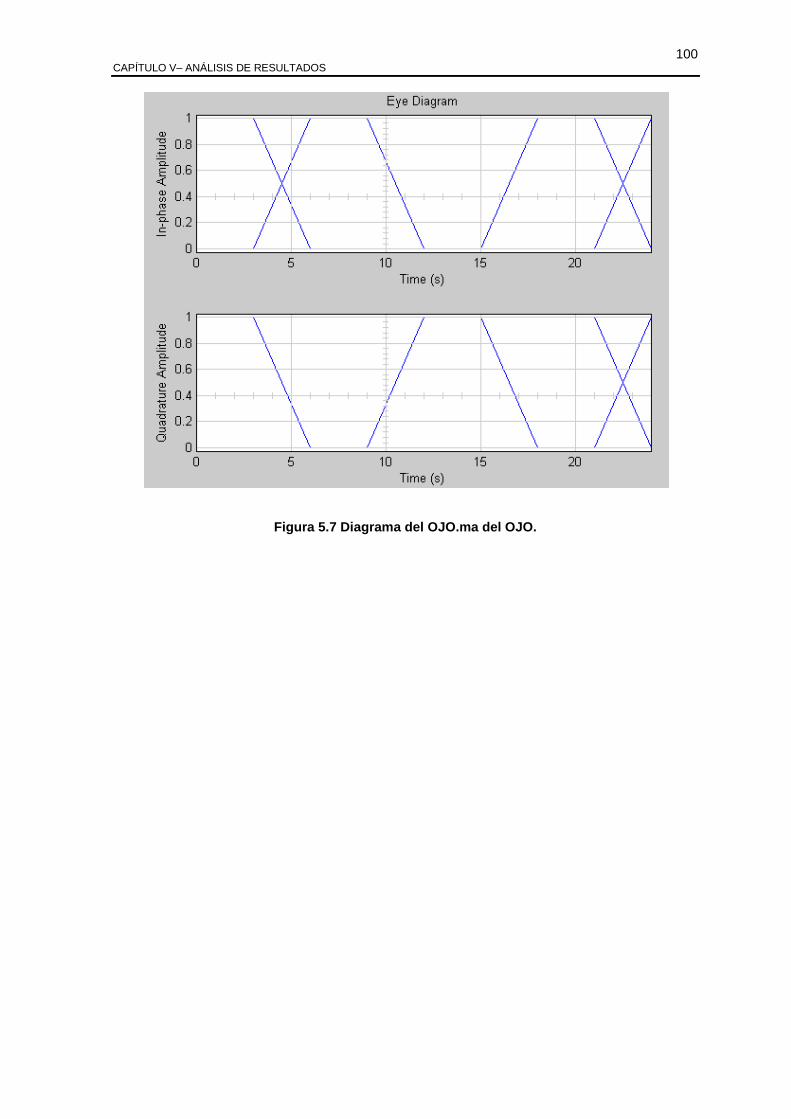
100 CAPÍTULO V– ANÁLISIS DE RESULTADOS
Figura 5.7 Diagrama del OJO.ma del OJO.
CONCLUSIONES Y RECOMENDACIONES
Después de analizar la información de la etapa de recepción de un sistema
de comunicaciones, conocer el funcionamiento de la tecnología FPGA y
finalizadas las simulaciones y pruebas en la tarjeta Spartan 3-E es posible
alcanzar una serie de conclusiones relacionadas con el desarrollo de este
proyecto.
La Tecnología FPGA es un conjunto de dispositivos semiconductores que
contienen componentes lógicos programables e interconexiones programables
entre ellos que permiten implementar sistemas electrónicos digitales en un
tiempo reducido sin la necesidad de verificación de sus componentes, tarea que
ya es realizada por el fabricante.
La necesidad de desarrollar un diseño en un FPGA, de forma rápida,
eficiente, fiable con un bajo coste asociado ha obligado a fabricantes de
herramientas EDA a desarrollar aplicaciones como System Generator, que tiene
una interfaz gráfica que facilita y agiliza el labor del diseñador además mediante
el uso de bloques permite una mejor asimilación del modelo que se está
realizando.
Para tener control sobre los periféricos (ADC) o el reloj en hardware de una
tarjeta de desarrollo, System Generator permite al diseñador importar código
HDL(VHDL o verilog) o crear un bloque mediante código matlab pero con ciertas
restricciones.
ChipScope Pro es una herramienta de la compañía Xilinx que permite
comprobar en tiempo real el funcionamiento de las señales de un diseño
facilitando la depuración y el análisis de los elementos más críticos de un modelo.
102 CONCLUSIONES Y RECOMENDACIONES
Para poder optimizar los recursos del FPGA en la demodulación BPSK la
frecuencia de la señal portadora debe ser casi igual a la mitad de la frecuencia de
de los símbolos obtenidos después de la codificación convolucional debido a que
el filtro digital paso bajo en el receptor utiliza un menor orden y por ende un
menor número de bits para diferenciar los niveles positivos o negativos del
producto de la señal BPSK por la portadora.
System generator es una herramienta que da muchas facilidades al
momento de diseñar debido a bloques de simulink que permiten analizar las
diferentes señales, pero por estar empleando un lenguaje de más alto nivel
(gráfico) se pierde cierto control sobre la estructura hardware, porque al usar
bloques generales es más difícil optimizar en cuanto a área de silicio ocupada,
tiempos y rendimientos
La co-simulación hardware, es una de las cualidades más importantes de
System Generator por que permite simular en tiempo real un diseño
implementado en el FPGA y comparar a la vez con la simulación del diseño sin
implementar.
Es necesario conocer algunos aspectos de lenguaje HDL, por que
permiten dar una visión del código HDL generado después de la compilación
del modelo en System Generator y así poder corregir algunas líneas de código
que no se pueden configurar directamente en cada bloque.
Para poder manipular dispositivos periféricos al FPGA como el conversor
análogo digital es necesario conocer con detalle su funcionamiento y como esta
interactuando con el FPGA.
Para sincronizar mejor las etapas del modelo los periodos de tiempo de
los bloque deben ser iguales en lo posible y cuando sea necesario utilizar
bloques de retardo.
103 CONCLUSIONES Y RECOMENDACIONES
System Generator es una herramienta ideal para el aprendizaje de las
diferentes teorías por que permite la fácil implementación de modelos
electrónicos en hardware permitiendo al estudiante la posibilidad de entender
cómo se desempeñan los diferentes métodos en la práctica.
Para la optimización del recetor se debería diseñar un circuito de
recuperación de portadora en System Generator para hacer una demodulación
coherente sin la necesidad de conocer la fase de la portadora en el transmisor.
REFERENCIAS BIBLIOGRÁFICAS
[1] Joaquín Luque Rodríguez, Sebastián Clavijo Suero, Modulación De Señales
Digitales, UNIVERSIDAD DE SEVILLA, DEPARTAMENTO DE TECNOLOGÍA
ELECTRÓNICA.
[2] Oriol Sallent Roig, José Luis Valenzuela González, Ramón Agustí Comes, Principios de comunicaciones móviles, Primera Edición, Edición de la Universidad Politécnica de Catalunya, Septiembre 2003 [3] Simon Haykin, Sistemas de Comunicación, Primera edición, Editorial LIMUSA WILEY, 2002 [4] Basil M. Al-Hadithi, Juan Suardíaz Muro, ―Nuevas Tendencias En El Diseño
Electrónico Digital: Codiseño Hardware/Software‖, Universidad Alfonso X El Sabio.
[5] Octavio H. Alpago, Miguel A. Sagreras, ―Lógica Programable: FPGA”,
Universidad de Buenos Aires, Facultad de Ingeniería
[6] Emmanuel López Trejo, ―Implementación Eficiente en FPGA del Modo CCM
usando AES”, Centro de Investigación y de Estudios Avanzados del Instituto
Politécnico Nacional Unidad Zacatenco
[7] Ian Kuon, Russell Tessier, Jonathan Rose, ―FPGA Architecture: Survey and
Challenges”, Vol 2, 2008
[8] Gerardo Castro Jiménez, “Procedimiento de diseño e implementación de
circuitos digitales utilizando herramientas EDA de código abierto”, Universidad de
Costa Rica.
[9] Ian Grout, “Digital Systems Design with FPGAs and CPLDs‖, Elsevier Ltd. 2008
[10]http://bibing.us.es/proyectos/abreproy/11155/fichero/Memoria%252F1_Introdu
cci%F3n.pdf
[11] Manuel Gutiérrez Rizo,“Evaluación de herramientas de alto nivel para diseño
hardware‖, Departamento de Ingeniería Electrónica, UNIVERSIDAD DE SEVILLA,
2007
[12] Digilent Inc., Digital Design Engineer’s Source < http://www.digilentinc.com/ >
[13] Xilinx, ―Spartan-3E Starter Kit Board User Guide‖, Xilinx Ltd, p.75-81,2006.
[14] Dennis Silage,‖ Embedded Design Using Programmable Gate
Arrays‖,Electrical and computer Engineering, Temple University,2008
Sangolquí, 7 de Diciembre de 2010
ELABORADO POR:
______________________________
Gabriel Darío Fierro Piñeiros
C.I. 171674506-0
______________________________
Ing. Gonzalo Olmedo Ph.D
DIRECTOR DE LA CARRERA DE INGENIERÍA EN ELECTRÓNICA Y
TELECOMUNICACIONES