edo teoría de la existencia y la prolongabilidad · 2) la constante de lipschitz permite controlar...
TRANSCRIPT

1
EDO – Teoría de la existencia y la prolongabilidad
Contenidos:
Teorema de Ascoli – Arzelá ······················································ 2
Teorema de Cauchy – Peano ······················································ 4
Teorema de Picard – Lindelöf ······················································ 9
Lema de Wintner ·································································· 12
Lema de Gronwall ································································· 18
Teorema de las soluciones aproximadas ·········································· 21
Teorema de dependencia Lipschitz de las condiciones iniciales ··············· 23
Teorema de dependencia continua de parámetros ······························ 24
Teorema de diferenciabilidad de Peano ··········································· 26
Teorema de dependencia diferenciable de valores iniciales ··················· 28

2
A lo largo del capítulo estudiaremos la teoría de existencia y unicidad, la teoría
de la prolongabilidad y la dependencia de parámetros.
El primer teorema que vemos es el teorema de Cauchy-Peano o Teorema de
existencia Global.
Idea del teorema: En aplicación del teorema de Ascoli – Arzelá se construye una
sucesión de poligonales de Euler, que son soluciones aproximadas del PVI.
Como vemos que va a ser relevante, recordamos el teorema de Ascoli-Arzelá.
Para ello tenemos que recordar primero qué significaba la equicontinuidad.
Definición: Equicontinuidad.
Diremos que una sucesión de funciones {𝑓𝑘} ⊂ 𝒞([𝑎, 𝑏]) es equicontinua si, y sólo
si:
∀휀 > 0, ∃𝛿 > 0 𝑡𝑞 ∀𝑥, 𝑦 ∈ [𝑎, 𝑏], |𝑥 − 𝑦| < 𝛿 ⟹ |𝑓𝑘(𝑥) − 𝑓𝑘(𝑦)| < 휀, ∀𝑘 ∈ ℕ
Salta a la vista que es un concepto muy similar al de límite (y continuidad por lo
tanto) en funciones de variable real. La idea que representa formalmente es la
de que “a más cerca estén dos puntos 𝑥, 𝑦 más cerca estarán sus imágenes,
independientemente del miembro de la sucesión de funciones”. Algo así como
una continuidad “sobre toda la sucesión”.
Teorema: Ascoli – Arzelá.
Dada una sucesión {𝑓𝑘} ⊂ 𝒞([𝑎, 𝑏]). Si es equicontinua y uniformemente acotada
entonces existe una subsucesión uniformemente convergente en [𝑎, 𝑏].
Demostración.
Consideremos el conjunto numerable ℚ ∩ [𝑎, 𝑏], subconjunto de [𝑎, 𝑏].
Ordenamos dicho conjunto:
ℚ⋂[𝑎, 𝑏] = {𝑥1, 𝑥2, … } =:𝐵
Sea ahora:
{𝑓𝑘(𝑥1)}𝑘∈ℕ ⊂ ℝ
Una sucesión acotada de números. Por compacidad podemos extraer una
subsucesión convergente. Digamos:
{𝑓𝑘1(𝑥1)}𝑘∈ℕ⊂ {𝑓𝑘(𝑥1)} ⊂ ℝ
Considero ahora la sucesión acotada:
{𝑓𝑘1(𝑥2)}
{𝑓𝑘1} ⊂ {𝑓𝑘} ⊂ ℝ
Y extraigo la sucesión convergente:
{𝑓𝑘2(𝑥2)}𝑘∈ℕ ⊂ {𝑓𝑘1(𝑥2)}𝑘∈ℕ⊂ ℝ

3
Repitiendo el proceso recurrentemente tenemos:
𝑓11(𝑥), 𝑓21(𝑥), 𝑓31(𝑥),…
𝑓12(𝑥), 𝑓22(𝑥), 𝑓32(𝑥),…
𝑓13(𝑥), 𝑓23(𝑥), 𝑓33(𝑥),…
𝑒𝑡𝑐.
La primera sucesión es convergente en 𝑥1
La segunda sucesión es convergente en 𝑥1 por ser subsucesión de 𝑓𝑘1(𝑥2) y en 𝑥2
por construcción.
De forma análoga, la tercera sucesión es convergente en 𝑥1, 𝑥2, 𝑥3. Y así
sucesivamente.
Aplicamos argumento de la diagonal. Consideramos:
𝑓𝑘 ≔ {𝑓𝑘𝑘(𝑥)}𝑘 = 𝑓11(𝑥), 𝑓22(𝑥), 𝑓33(𝑥),…
¿Es uniformemente convergente esta sucesión?
Sí, lo es. Demostración:
Veamos que es de Cauchy uniformemente. Por equicontinuidad se tiene que,
dado 휀 > 0 existe un 𝛿 > 0 de forma que:
∀𝑥, 𝑦: |𝑥 − 𝑦| < 𝛿 ⟹ |𝑓𝑘(𝑥) − 𝑓𝑘(𝑦)| <휀
3, ∀𝑘
Nota: 𝛿 depende exclusivamente de 휀.
Utilizamos la densidad de ℬ = {𝑥1, 𝑥2, 𝑥3, … }. Dado 𝛿 > 0, para cada 𝑥 ∈ [𝑎, 𝑏]
existe 𝑦 ∈ 𝐵 de forma que:
𝑥 ∈ 𝐵(𝑦, 𝛿) ⟺ |𝑥 − 𝑦| < 𝛿
Entonces el siguiente conjunto:
{𝐵(𝑦, 𝛿)}𝑦∈ℬ
Es un recubrimiento de [𝑎, 𝑏]. Por compacidad, este recubrimiento admite un
subrecubrimiento finito. Esto es: existen 𝑦1, … , 𝑦𝑗 ∈ ℬ de tal manera que:
|𝑥 − 𝑦𝑖| < 𝛿, ∀𝑥, ∀𝑦𝑖
Por último, tenemos que en dichos puntos 𝑦𝑖 la sucesión 𝑓𝑘 es convergente. Es
decir que existe 𝑁𝑖 natural, de tal manera que:
|𝑓𝑛(𝑦𝑖) − 𝑓𝑚(𝑦𝑖)| <휀
3, ∀𝑛,𝑚 > 𝑁𝑖
Tomemos: 𝑁 = max𝑖=1,…,𝑗
𝑁𝑖
4
Entonces, si 𝑛,𝑚 > 𝑁 se tiene que |𝑓𝑛 − 𝑓𝑚| < 휀. En efecto:
|𝑓𝑛(𝑥) − 𝑓𝑚(𝑥)| = |𝑓𝑛(𝑥) − 𝑓𝑛(𝑦𝑗) + 𝑓𝑛(𝑦𝑗) − 𝑓𝑚(𝑦𝑗) + 𝑓𝑚(𝑦𝑗) − 𝑓𝑚(𝑥)| < 휀
Por lo tanto 𝑓𝑘 converge uniformemente en ℬ. QED.
Vamos con el teorema de existencia de Cauchy-Peano.
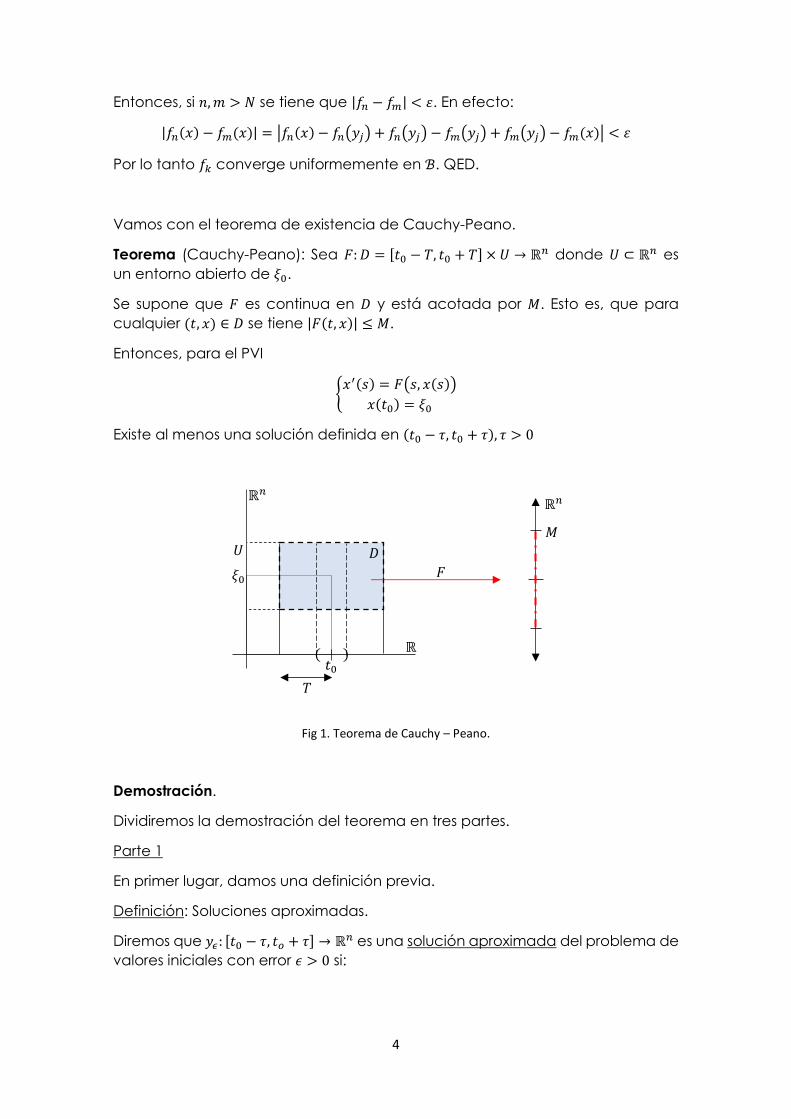
Teorema (Cauchy-Peano): Sea 𝐹: 𝐷 = [𝑡0 − 𝑇, 𝑡0 + 𝑇] × 𝑈 → ℝ𝑛 donde 𝑈 ⊂ ℝ𝑛 es
un entorno abierto de 𝜉0.
Se supone que 𝐹 es continua en 𝐷 y está acotada por 𝑀. Esto es, que para
cualquier (𝑡, 𝑥) ∈ 𝐷 se tiene |𝐹(𝑡, 𝑥)| ≤ 𝑀.
Entonces, para el PVI
{𝑥′(𝑠) = 𝐹(𝑠, 𝑥(𝑠))
𝑥(𝑡0) = 𝜉0
Existe al menos una solución definida en (𝑡0 − 𝜏, 𝑡0 + 𝜏), 𝜏 > 0
Fig 1. Teorema de Cauchy – Peano.
Demostración.
Dividiremos la demostración del teorema en tres partes.
Parte 1
En primer lugar, damos una definición previa.
Definición: Soluciones aproximadas.
Diremos que 𝑦𝜖: [𝑡0 − 𝜏, 𝑡𝑜 + 𝜏] → ℝ𝑛 es una solución aproximada del problema de
valores iniciales con error 𝜖 > 0 si:
𝑈 𝐷
𝑇
𝑡0
𝜉0
ℝ
ℝ𝑛 ℝ𝑛
𝑀
𝐹
( )

5
1) (𝑡, 𝑦𝜖(𝑡)) ∈ 𝐷 cuando 𝑡 ∈ [𝑡0 − 𝜏, 𝑡0 + 𝜏]
2) 𝑦𝜖 es continua en [𝑡0 − 𝜏, 𝑡0 + 𝜏] y tiene derivada acotada, salvo, como
mucho, en un número finito de puntos.
3) |𝑦𝜖′(𝑡) − 𝐹(𝑡, 𝑦𝜖(𝑡))| ≤ 𝜖 para cualquier 𝑡 ∈ [𝑡0 − 𝜏, 𝑡0 + 𝜏] salvo quizás en
aquellos puntos en los que la derivada no está acotada.
4) 𝑦𝜖(𝑡0) = 𝜉0
Bueno, vamos a ver que las poligonales de Euler son soluciones aproximadas del
problema de valores iniciales para una elección adecuada del paso ℎ y del
intervalo de definición.
Proposición 1. Sea 𝐹 continua en 𝐷, y sea 𝜏 tal que �̅�(𝜉0, 𝜏 · 𝑀) ⊂ 𝑈, donde 𝑀 es
una cota de 𝐹 en 𝐷. Entonces, para cualquier 𝜖 > 0 existe una poligonal de Euler
𝑦𝜖: [𝑡0 − 𝜏, 𝑡𝑜 + 𝜏] → ℝ𝑛
Que es solución aproximada del problema de valores iniciales con error 𝜖.
Fig 2. Poligonales de Euler como soluciones aproximadas
Demostración.
Vamos a construir poligonales 𝜖-aproximadas. Demostraremos, simplemente,
que cumplen la definición. Las construiremos, además, en el intervalo [𝑡0, 𝑡0 + 𝜏].
Naturalmente, en la otra mitad del intervalo es completamente análogo.
Elegiremos como paso de la poligonal ℎ = 𝜏/𝑘, donde 𝑘 es un natural que
determinaremos a continuación.
El intervalo queda entonces dividido en 𝑘 trozos mediante 𝑘 + 1 puntos.
{𝑡0, … , 𝑡𝑘}
Los cuales generan otros tantos 𝜉𝑗, definidos por:
𝜉𝑗 ≔ 𝜉𝑗−1 + ℎ · 𝐹(𝑡𝑗−1, 𝜉𝑗−1)
𝑈 𝐷
𝑇
𝑡0
𝜉0
ℝ
ℝ𝑛 ℝ𝑛
𝑀
{ }
𝐹
𝜏
{ }
𝜏 · 𝑀

6
La poligonal va a ser la interpolación lineal entre estos valores. Probamos que
las poligonales cumplen las propiedades de las soluciones aproximadas.
1) 𝑡 ∈ [𝑡0 − 𝜏, 𝑡0 + 𝜏] ⟹ (𝑡, 𝑦𝜖(𝑡)) ∈ 𝐷
𝑡𝑗 − 𝑡𝑗−1 = ℎ. Entonces |𝜉1 − 𝜉0| = |ℎ · 𝐹(𝑡0, 𝜉0)| ≤ ℎ · 𝑀. Por inducción:
|𝜉𝑗 − 𝜉0| ≤ 𝜏 · 𝑀
Se ha elegido 𝜏 tal que 𝐵(𝜉0, 𝜏 · 𝑀) ⊂ 𝑈. Por convexidad, las poligonales de
Euler pertenecen al dominio. ∎
2) Es obvio que son continuas y además el valor siempre es finito porque la
imagen de un punto para cierto 𝑡 es 𝐹 que está acotada. ∎
3) Fijado 𝑘 se tiene que el valor de la poligonal es:
𝑃𝑘(𝑡) = 𝜉𝑗 + 𝐹(𝑡𝑗, 𝜉𝑗) · (𝑡 − 𝑡𝑗), ∀𝑡 ∈ [𝑡𝑗, 𝑡𝑗+1]
Queremos demostrar que:
|𝑃𝑘′(𝑡) − 𝐹(𝑡, 𝑃𝑘(𝑡))| < 𝜖
Por la continuidad uniforme (por compacidad) de 𝐹, dado 𝜖 > 0 existe
𝛿 > 0 tal que: si |𝑡 − 𝑠| < 𝛿 y |𝜉 − 𝜂| < 𝛿 entonces:
|𝐹(𝑡, 𝜉) − 𝐹(𝑠, 𝜂)| < 𝜖
Tomemos 𝑘 de tal manera que:
ℎ =𝜏
𝑘≤𝛿
𝑀
Así, si 𝑡 ∈ [𝑡𝑗, 𝑡𝑗+1] entonces:
|𝑃𝑘′(𝑡) − 𝐹(𝑡, 𝑃𝑘(𝑡))| = |𝐹(𝑡𝑗, 𝜉𝑗) − 𝐹 (𝑡, 𝜉𝑗 + 𝐹(𝑡𝑗, 𝜉𝑗)(𝑡 − 𝑡𝑗))|
Dado que |𝑡 − 𝑡𝑗| < ℎ ≤ 𝛿 y |𝜉𝑗 − (𝜉𝑗 + 𝐹(𝑡𝑗, 𝜉𝑗)(𝑡 − 𝑡𝑗)) ≤ ℎ · 𝑀 ≤ 𝛿 queda
que:
|𝑃𝑘′(𝑡) − 𝐹(𝑡, 𝑃𝑘(𝑡))| < 𝜖, ∎
Parte 2
Proposición: Sea {𝜖𝑘} sucesión acotada de números positivos. Entonces la
sucesión {𝑦𝜖𝑘} ⊂ [𝑡0, 𝑡0 + 𝜏] de soluciones 𝜖𝑘-aproximadas del PVI es equiacotada
y equicontinua.
Demostración:
Observamos que, para un solución aproximada 𝑦𝜖𝑘 que naturalmente cumple
las condiciones 1),2) se sigue, por iteración en los intervalos [𝑡𝑗, 𝑡𝑗+1] del teorema
fundamental del cálculo, que dado 𝑡 ∈ [𝑡0, 𝑡0 + 𝜏]:
𝑦𝜖𝑘(𝑡) = 𝑦𝜖𝑘(𝑡0) + ∫ 𝑦𝜖′(𝑠) · 𝑑𝑠
𝑡
𝑡0

7
Demostración de equiacotada:
|𝑦𝜖𝑘(𝑡) − 𝜉0| = |∫ 𝑦′(𝑠) · 𝑑𝑠𝑡
𝑡0
| ≤ ∫ |𝐹 (𝑠, 𝑦𝜖𝑘(𝑠))| · 𝑑𝑠𝑡
𝑡0
+ 𝜖𝑘 · 𝜏 ≤ 𝜏 · (𝑀 + 𝜖𝑘)
Demostración de equicontinuidad.
𝑦𝜖𝑘(𝑡) − 𝑦𝜖𝑘(𝑡̅) = ∫ 𝑦𝜖(𝑠) · 𝑑𝑠𝑡
𝑡̅
Por lo tanto:
|𝑦𝜖(𝑡) − 𝑦𝜖(𝑡̅)| ≤ 𝜖 · (𝑡 − 𝑡̅) + ∫ |𝐹(𝑠, 𝑦𝜖(𝑠))| · 𝑑𝑠𝑡
𝑡̅≤ (𝑀 + 𝜖) · (𝑡 − 𝑡̅)
QED
Parte 3
Hallar una solución del PVI es equivalente a hallar una 𝑥(𝑡) que satisfaga:
𝑥(𝑡) = 𝜉0 +∫ 𝐹(𝑠, 𝑥(𝑠)) · 𝑑𝑠𝑡
𝑡0
, (𝟏)
Tomemos las 𝜖𝑘 soluciones aproximadas dadas por las poligonales de Euler.
Tomemos 𝑦𝑘 subsucesión uniformemente convergente dada por el teorema de
Ascoli – Arzelá.
Veamos entonces que su límite uniforme es una solución de (1).
Sea 𝛿 > 0 tal que, por la continuidad uniforme de 𝐹, si |𝜉 − 𝜂| < 𝛿 entonces:
|𝐹(𝑡, 𝜉) − 𝐹(𝑡, 𝜂)| ≤ 𝜖/3𝜏
Tomemos 𝑘 suficientemente grande como para que:
|𝑥 − 𝑦𝑘| < min (𝛿, 𝜖/3)
Y también:
𝜖𝑘 < 𝜖/3𝜏
Entonces:
|𝑥(𝑡) − 𝜉0 −∫ 𝐹(𝑠, 𝑥(𝑠)) · 𝑑𝑠𝑡
𝑡0
| ≤
≤ |𝑥(𝑡) − 𝑦𝑘(𝑡) + 𝑦𝑘(𝑡) − 𝜉0 −∫ 𝐹(𝑠, 𝑦𝑘(𝑠)) · 𝑑𝑠𝑡
𝑡0
+∫ 𝐹(𝑠, 𝑦𝑘(𝑠)) · 𝑑𝑠𝑡
𝑡0
−∫ 𝐹(𝑠, 𝑥(𝑠)) · 𝑑𝑠𝑡
𝑡0
| ≤

8
≤𝜖
3+ 𝜖𝑘 · 𝜏 +
𝜖
3≤ 𝜖
Como 𝜖 es tan pequeño como se desee, queda probada la convergencia. QED.
Tal y como hemos visto, Cauchy – Peano sólo nos asegura la existencia de
solución, no la unicidad. Vamos a ver otro teorema basado en los sistemas de
ecuaciones diferenciales que da condiciones suficientes para la existencia de
solución única a nivel local. Primero tenemos que revisitar algunos conceptos.
Definición: Lipschitzidad local.
Decimos que una función 𝑓:ℝ𝑛 → ℝ𝑚 es localmente Lipschitz si dado cualquier
punto 𝑥 ∈ ℝ𝑛 existe un entorno suyo en el que 𝑓 es globalmente Lipschitz.
Definición: Lipschitzidad global.
Decimos que una función 𝑓:ℝ𝑛 → ℝ𝑚 es globalmente Lipschitz si existe una
constante 𝐿 tal que:
|𝑓(𝑥) − 𝑓(𝑦)| ≤ 𝐿 · |𝑥 − 𝑦|, ∀𝑥, 𝑦 ∈ ℝ𝑛
Observaciones:
1) En particular, si 𝐷𝑓 continua y acotada en el dominio 𝐷 de definición, por
el teorema del valor medio se prueba que 𝑓 cumple la hipótesis de
Lipschitzidad local, y además:
𝐿 = 𝑛 · sup{|𝐷𝑖𝑓(𝑥)|: 𝑥 ∈ 𝐷, 𝑖 = 1,… , 𝑛}
2) La constante de Lipschitz permite controlar la distancia entre soluciones.
Esto motiva el siguiente Lema:
Lema: Dependencia continua de las condiciones iniciales.
Sean 𝑥, 𝑦 ∈ ℝ𝑛 soluciones de 𝑥′ = 𝐹(𝑡, 𝑥), supongamos 𝐹 función 𝐿-lipschitziana en
un entorno de las gráficas de 𝑥, 𝑦 para 𝑡 ∈ [𝑡0, 𝑡1]. Entonces, si 𝑡 ∈ [𝑡0, 𝑡1]:
|𝑥(𝑡) − 𝑦(𝑡)| ≤ 𝑒𝐿·(𝑡−𝑡0) · |𝑥(𝑡0) − 𝑦(𝑡0)|
Demostración:
Se obtiene directamente derivando.
𝑑
𝑑𝑡· |𝑥(𝑡) − 𝑦(𝑡)|2 = 2 · |𝑥(𝑡) − 𝑦(𝑡)| · |𝐹(𝑡, 𝑥) − 𝐹(𝑡, 𝑦)| ≤ 2𝐿|𝑥(𝑡) − 𝑦(𝑡)|2
Entonces:
|𝑥(𝑡) − 𝑦(𝑡)| ≤ 𝑒𝐿·(𝑡−𝑡0) · |𝑥(𝑡0) − 𝑦(𝑡0)|

9
Teorema (Picard-Lindelöf): Sea 𝐹:𝐷 ⊂ ℝ× ℝ𝑛 → ℝ𝑛 continua y 𝐿-lipschitz con
respecto a la segunda variable 𝜉 ∈ ℝ𝑛 en 𝐷 entorno de (𝑡0, 𝜉0). Entonces el PVI:
𝑥′(𝑡) = 𝐹(𝑡, 𝑥), 𝑥 ∈ ℝ𝑛
Tiene una única solución en 𝑡 ∈ (𝑡 − 𝛿, 𝑡 + 𝛿), con 𝛿 > 0.
Fig 3. Teorema de Picard – Lindelöf.
Demostración:
𝐹: 𝐷 ⊂ ℝ × ℝ𝑛 → ℝ𝑛
𝑥: [𝑡 − 𝛿, 𝑡 + 𝛿] → ℝ𝑛
𝑥′ = 𝐹(𝑡, 𝑥)
𝑥(𝑡0) = 𝜉0
Podemos suponer que 𝑈 = [𝑡0 − 𝑇, 𝑡0 + 𝑇] × �̅�(𝜉0, 𝜌). Utilizaremos el teorema del
punto fijo de Banach. Encontrar una solución del PVI es encontrar una 𝑥(𝑡) tal
que:
𝑥(𝑡) = 𝜉0 +∫ 𝐹(𝑠, 𝑥(𝑠)) · 𝑑𝑠𝑡
𝑡0
, 𝑡 ∈ [𝑡0 − 𝛿, 𝑡0 + 𝛿]
Definimos la aplicación:
𝜙(𝑦(𝑡)) = 𝜉0 +∫ 𝐹(𝑠, 𝑥(𝑠)) · 𝑑𝑠𝑡
𝑡0
𝜙:𝒞([𝑡0 − 𝛿, 𝑡0 + 𝛿], ℝ𝑛) → 𝒞([𝑡0 − 𝛿, 𝑡0 + 𝛿], ℝ
𝑛)
𝑀 𝐷
𝑇 𝑡0
𝜉0
ℝ
ℝ𝑛
𝑈
ℝ𝑛
𝐹
𝛿
𝜌 𝑈

10
Vamos a ver que 𝜙 es una aplicación contractiva sobre el espacio métrico
𝒞([𝑡0 − 𝛿, 𝑡0 + 𝛿], ℝ𝑛) para una cierta elección de 𝛿 > 0 y con la norma del
supremo con el peso 𝑒𝐿𝑡.
Para que esté bien definido 𝜙 debe tener sentido
𝐹(𝑠, 𝑦(𝑠))
Para 𝑠 ∈ [𝑡0 − 𝛿, 𝑡0 + 𝛿], luego 𝑦(𝑠) ⊂ 𝐵(𝜉0, 𝜌) ⟺ |𝑦 − 𝜉0| < 𝜌. Por lo tanto:
sup𝑠∈[𝑡0−𝛿,𝑡0+𝛿]
|𝑦(𝑠) − 𝜉0| < 𝜌
Tomemos el espacio de funciones:
𝔹 = {𝑦 ∈ 𝒞((𝑡0 − 𝛿, 𝑡0 + 𝛿)): |𝑦 − 𝜉0| < 𝜌 ∀𝑡 ∈ [𝑡0 − 𝛿, 𝑡0 + 𝛿]}
Elegiremos 𝛿 para que:
𝜙:𝔹 → 𝔹
Es decir que:
|𝜙(𝑦(𝑡)) − 𝜉0| < 𝜌, ∀t ∈ [t0 − δ, t0 + δ]
Esto es:
|𝜉0 +∫ 𝐹(𝑠, 𝑦(𝑠)) · 𝑑𝑠𝑡
𝑡0
− 𝜉0| ≤ ∫ |𝐹(𝑠, 𝑦(𝑠))| · 𝑑𝑠𝑡
𝑡0
= 𝑀 · (𝑡 − 𝑡0) ≤ 𝑀𝛿 < 𝜌
Con lo cual, hemos de escoger 𝛿 tal que:
𝛿 <𝜌
𝑀
Nota: Seguimos suponiendo 𝐹 acotada al igual que antes, lógicamente.
Ahora, sean 𝑦, 𝑧 ∈ 𝔹 veamos que 𝜙 contractiva en 𝔹 para la siguiente distancia:
|𝑦 − 𝑧|𝐿 = sup𝑡∈[𝑡𝑜,𝑡0+𝛿]
{𝑒−𝐿𝑡|𝑦 − 𝑧|}
Veámoslo:
|𝜙𝑦 − 𝜙𝑧|𝐿 = sup𝑡∈(𝑡0−𝛿,𝑡0+𝛿)
{𝑒−𝐿𝑡 · |∫ 𝐹(𝑠, 𝑦) − 𝐹(𝑠, 𝑧) · 𝑑𝑠𝑡
𝑡0
|} ≤
≤ sup𝑡{∫ 𝑒−𝐿𝑡 · 𝐿 · |𝑦 − 𝑧|𝐿 · 𝑑𝑠
𝑡
𝑡0
} ≤ |𝑦 − 𝑧|𝐿 · sup𝑡{1 − 𝑒𝑡0−𝑡}
En efecto, 𝜙 es contractiva constante 𝐶 = 1 − 𝑒−𝐿𝑡 < 1, con lo cual existe un
punto fijo.
QED.

11
Observaciones:
1) Se ha probado que 𝜙(𝑦(𝑠)) ≔ 𝜉0 + ∫ 𝐹(𝑠, 𝑦(𝑠)) · 𝑑𝑠𝑡
𝑡0 es contractiva en el
espacio de funciones continuas en (𝑡0 − 𝛿, 𝑡0 + 𝛿) que distan de 𝜉0 menos
que 𝜌, y que por lo tanto en dicho entorno, que corresponde a la zona
rallada en verde en la figura 3, existe una única solución.
2) El tamaño 𝛿 del intervalo de existencia-unicidad depende de 𝜌, definido
previamente, y de 𝑀 cota de 𝐹.
3) El tamaño 𝛿 es independiente de 𝐿 constante de Lipschitzidad.
4) Se deduce que la solución es prolongable hasta un 𝑡1 tal que |𝑡1 − 𝑡0| no
exceda ni 𝑇 ni tampoco 𝜌/𝑀. Recordemos, 𝑇 es la “anchura” de 𝑈
utilizada en Cauchy – Peano.
5) Utilizamos la norma con peso exponencial porque así 𝛿 no depende de
la constante 𝐿.
6) Cauchy – Peano supone únicamente la continuidad de 𝐹 e implica
existencia. Al exigirle a 𝐹 también Lipschitzidad podemos asegurar
unicidad, sin embargo el intervalo en el que existe solución única no
depende de la constante de Lipschitzidad, si no del tamaño del entorno
de 𝜉0 = 𝑥(𝑡0) y de la cota de 𝐹.
Podemos preguntarnos si es posible llevar a 𝛿 más allá de min(𝑇, 𝜌/𝑀). Esto
motiva la siguiente etapa de nuestro estudio. La prolongabilidad de soluciones.

12
Empezamos viendo algunas definiciones previas.
Definición: Intervalo de definición y prolongaciones.
Sea 𝑥 una solución del PVI e 𝐼 aquel intervalo centrado en 𝑡0 en el cual está
definida. Designaremos mediante el par (𝑥, 𝐼) a dicha solución asociada al
intervalo. Diremos que (�̃�, 𝐼) es prolongación de (𝑥, 𝐼) si:
1) 𝐼 ⊂ 𝐼
2) �̃� = 𝑥, ∀𝑡 ∈ 𝐼
Ambos 𝐼, 𝐼 pueden ser intervalos abiertos, cerrados, semiabiertos, semicerrados
o semirectas.
Definición: Prolongabilidad.
Diremos que (𝑥, 𝐼) es no prolongable si no existe prolongación de (𝑥, 𝐼).
Lema: Dada (𝑥, 𝐼) siempre existe una prolongación suya (�̃�, 𝐼) que es no
prolongable.
Demostración:
Sea 𝒫 = {(𝑥𝛼 , 𝐼𝛼)}𝛼
Diremos que (𝑥𝛼 , 𝐼𝛼) ≼ (𝑥𝛽 , 𝐼𝛽) ⟺ 𝐼𝛼 ⊂ 𝐼𝛽
Se tiene que (𝒫,≼) es totalmente ordenado.
Sea (𝑥𝛼 , 𝐼𝛼) cadena de prolongaciones.
Si defino (𝑥, 𝐼) tal que 𝐼 = ⋃ 𝐼𝛼𝛼 , tal (𝑥, 𝐼) es una cota superior.
Entonces, por le lema de Zorn existe elemento maximal. Entonces, por definición,
dicho maximal constituye una solución no prolongable. ∎
Definición: Punto de acumulación.
Diremos que 𝜉0 es un punto de acumulación de 𝑥(𝑡) cuando 𝑡 → 𝑡0− si existe una
sucesión {𝑡𝑘} → 𝑡0− de tal manera que 𝑥(𝑡𝑘) → 𝜉0.
Con ésta última definición quiere decirse, formalmente, que (𝑡0, 𝜉0) es un punto
de acumulación de la gráfica {(𝑡, 𝑥(𝑡)): 𝑡 < 𝑡0}. Es decir que:
Dado 𝜖 > 0 existe 𝜏 > 0 de tal manera que 0 < 𝑡0 − 𝜏 < 𝜖 y |𝑥(𝑡0 − 𝜏) − 𝜉0| < 𝜖
Vemos el primer lema importante de prolongabilidad.
Lema (de Wintner): Sea 𝐹: 𝐷 ⊂ ℝ × ℝ𝑛 → ℝ𝑛 continua, con 𝐷 entorno abierto de
(𝑡0, 𝜉0). Si existe solución de 𝑥′ = 𝐹(𝑡, 𝑥) definida en (𝑡0 − ℎ, 𝑡0) con ℎ > 0 y 𝜉0 es
punto de acumulación de 𝑥(𝑡) cuando 𝑡 → 𝑡0−, entonces ∃ lim
𝑡→𝑡0−𝑥(𝑡) = 𝜉0.
13
Demostración:
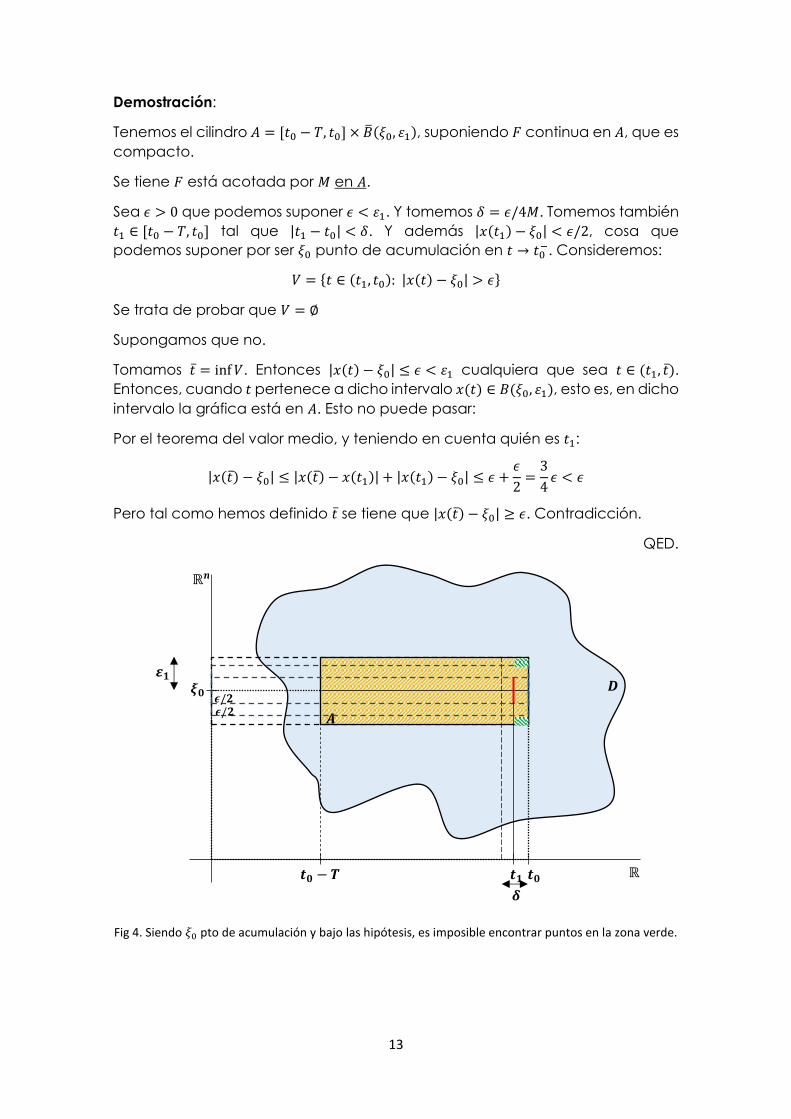
Tenemos el cilindro 𝐴 = [𝑡0 − 𝑇, 𝑡0] × �̅�(𝜉0, 휀1), suponiendo 𝐹 continua en 𝐴, que es
compacto.
Se tiene 𝐹 está acotada por 𝑀 en 𝐴.
Sea 𝜖 > 0 que podemos suponer 𝜖 < 휀1. Y tomemos 𝛿 = 𝜖/4𝑀. Tomemos también
𝑡1 ∈ [𝑡0 − 𝑇, 𝑡0] tal que |𝑡1 − 𝑡0| < 𝛿. Y además |𝑥(𝑡1) − 𝜉0| < 𝜖/2, cosa que
podemos suponer por ser 𝜉0 punto de acumulación en 𝑡 → 𝑡0−. Consideremos:
𝑉 = {𝑡 ∈ (𝑡1, 𝑡0): |𝑥(𝑡) − 𝜉0| > 𝜖}
Se trata de probar que 𝑉 = ∅
Supongamos que no.
Tomamos 𝑡̅ = inf 𝑉. Entonces |𝑥(𝑡) − 𝜉0| ≤ 𝜖 < 휀1 cualquiera que sea 𝑡 ∈ (𝑡1, 𝑡̅).
Entonces, cuando 𝑡 pertenece a dicho intervalo 𝑥(𝑡) ∈ 𝐵(𝜉0, 휀1), esto es, en dicho
intervalo la gráfica está en 𝐴. Esto no puede pasar:
Por el teorema del valor medio, y teniendo en cuenta quién es 𝑡1:
|𝑥(𝑡̅) − 𝜉0| ≤ |𝑥(𝑡̅) − 𝑥(𝑡1)| + |𝑥(𝑡1) − 𝜉0| ≤ 𝜖 +𝜖
2=3
4𝜖 < 𝜖
Pero tal como hemos definido 𝑡̅ se tiene que |𝑥(𝑡̅) − 𝜉0| ≥ 𝜖. Contradicción.
QED.
Fig 4. Siendo 𝜉0 pto de acumulación y bajo las hipótesis, es imposible encontrar puntos en la zona verde.
𝒕𝟎 𝒕𝟎 − 𝑻
𝝃𝟎 𝑫
ℝ𝒏
ℝ
𝜺𝟏
𝑨
𝜹
𝒕𝟏
𝝐/𝟐 𝝐/𝟐
14
Observación: La función 𝑥 no podría por ejemplo ser un llamado seno del
topólogo porque entonces 𝐹 → ∞ en 𝑡 → 𝑡0−, y 𝐹 es acotada por compacidad.
Definición: Frontera extendida.
Sea un conjunto 𝐷 y 𝜕𝐷 = �̅� ∖ �̇� su frontera topológica definimos la frontera
extendida como:
1) 𝜕𝐷 ∪ {∞}, si 𝐷 no acotado.
2) 𝜕𝐷, si 𝐷 acotado.
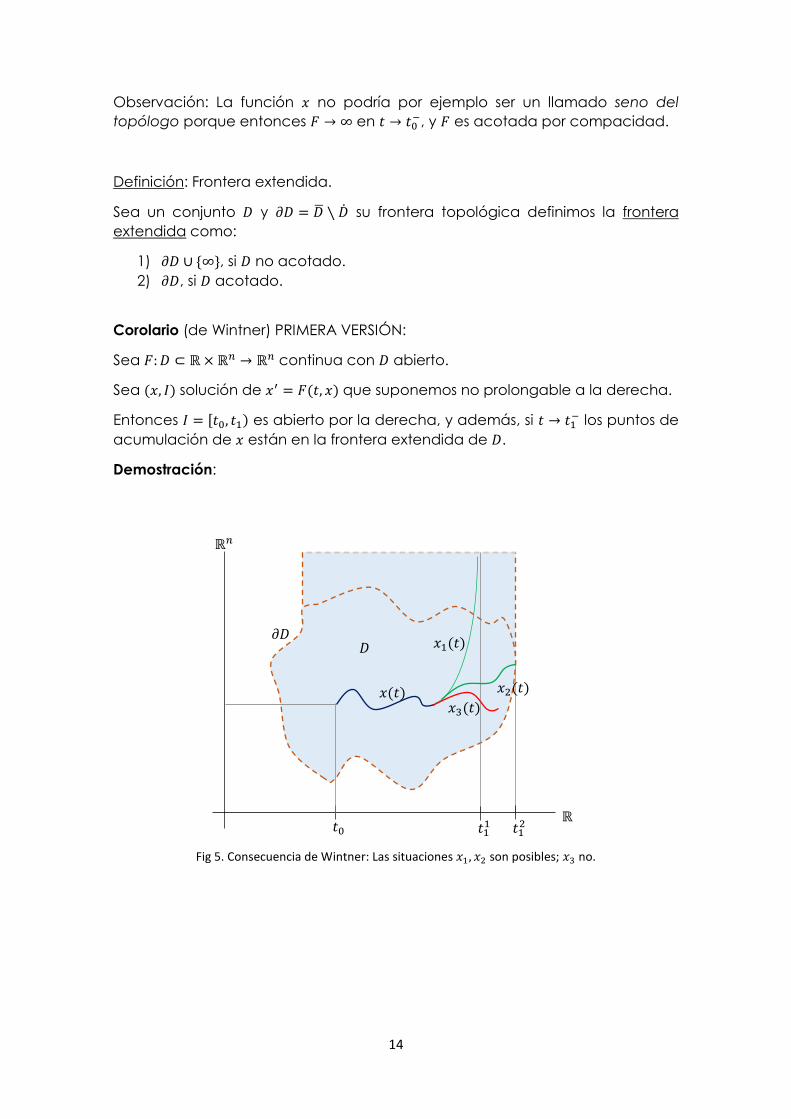
Corolario (de Wintner) PRIMERA VERSIÓN:
Sea 𝐹:𝐷 ⊂ ℝ× ℝ𝑛 → ℝ𝑛 continua con 𝐷 abierto.
Sea (𝑥, 𝐼) solución de 𝑥′ = 𝐹(𝑡, 𝑥) que suponemos no prolongable a la derecha.
Entonces 𝐼 = [𝑡0, 𝑡1) es abierto por la derecha, y además, si 𝑡 → 𝑡1− los puntos de
acumulación de 𝑥 están en la frontera extendida de 𝐷.
Demostración:
Fig 5. Consecuencia de Wintner: Las situaciones 𝑥1, 𝑥2 son posibles; 𝑥3 no.
ℝ
ℝ𝑛
𝑡0 𝑡11 𝑡1
2
𝑥(𝑡)
𝑥1(𝑡)
𝑥2(𝑡)
𝑥3(𝑡)
𝜕𝐷 𝐷

15
Si 𝐼 = [𝑡0,∞) trivial.
Supongamos que el intervalo es finito (en el sentido de: longitud finita).
Si lim𝑡→𝑡1
−𝑥(𝑡) = ∞ entones 𝜉1 está en la frontera extendida.
Si existe un punto de acumulación finito 𝜉1 entonces el lema de Wintner asegura
que existe el límite. Dicho punto 𝜉1 no puede pertenecer al interior de 𝐷 porque
entonces el problema:
{𝑦′ = 𝐹(𝑡, 𝑥)
𝑦(𝑡0) = 𝑥(𝑡1)
Tendría solución y la solución (𝑥, 𝐼) sería prolongable, contradicción.
La única posibilidad es que 𝜉1 pertenezca a la frontera topológica. QED.
Corolario (de Wintner) SEGUNDA VERSIÓN:
Sea 𝐹:𝐷 ⊂ ℝ× ℝ𝑛 → ℝ𝑛 con 𝐷 abierto.
Sea (𝑥, 𝐼) solución de 𝑥′ = 𝐹(𝑡, 𝑥) que suponemos no prolongable a la derecha.
Dado cualquier compacto 𝐾 ⊂ 𝐷 la solución escapa de 𝐾 en un 𝑡𝑘 < sup 𝐼, quiere
decirse: 𝑥(𝑡) ∉ 𝐾, ∀𝑡 > 𝑡𝑘.
Demostración:
Supongamos 𝐼 = (𝑇0, 𝑇1), y una sucesión 𝑡𝑗 → 𝑇1 de tal manera que (𝑡𝑗, 𝑥𝑗) ∈ 𝐾. Por
definición de compacidad, existe (𝑇1, 𝜉) = lim𝑗→∞
(𝑡𝑗, 𝑥𝑗(𝑡)) ∈ 𝐾 ⊂ 𝐷. Por el lema de
Wintner existe (𝑇1, 𝜉) = lim𝑡→𝑇1
(𝑡, 𝑥(𝑡)), un punto interior de 𝐷. La solución (𝑥, 𝐼)
podríamos prolongarla con una solución local a la derecha de del problema
con valor inicial 𝑥(𝑇1) = 𝜉. Contradicción.
Fig 6. Si la solución no escapase de 𝐾 antes de llegar a sup 𝐼 entonces sería prolongable
ℝ
ℝ𝑛
𝜕𝐷
𝐷
𝐾

16
Observación: El comportamiento de la solución en 𝑡 → 𝑡1 no tiene por qué ser
tan simple; puede ser muy diverso (oscilatorio, asintótico…).
Veamos algunos ejemplos de todo esto.
Ejemplo 1. Consideramos el domino 𝐷 = (−2,2) × (−2,2) con el PVI:
{𝑦′(𝑡) = 𝑦(𝑡)
𝑦(0) = 1
Tiene solución 𝑦 = 𝑒𝑡, que alcanza frontera en (−2, log(2)) y por el lema de
Wintner no es prolongable.
Ejemplo 2. Consideremos ahora 𝐷 = {(𝑡, 𝑦): 𝑡 > 0, 𝑦 > 0} con el problema:
{𝑦′(𝑡) = 𝑦
13𝑡
𝑦(1) = 𝑦0
Por integración elemental:
𝑦(𝑡) = (𝑦0
23 +
2
3(𝑡 − 1))
32
Entonces para valores positivos de 𝑦0 las soluciones no prolongables a la
izquierda llegan a 𝑦 = 0, ya que si 𝑦(𝑡) = 0 tiene solución 𝑡0 > 0. El límite de la
gráfica de estas soluciones no prolongables a la izquierda es el punto (𝑡0, 0).
Ejemplo 3. Sea el problema de valores iniciales con 𝐷 = {(𝑡, 𝑦): 𝑡 < 1, 𝑦 ∈ ℝ}
𝑦(𝑡) =
{
𝑦′(𝑡) = {
0, |𝑦| ≥ 11
(1 − 𝑡)2· √1 − 𝑦2, |𝑦| < 1
𝑦(0) =1
2
Las ecuaciones satisfacen las condiciones del teorema de existencia si 𝑡 ≠ 1. Por
integración elemental se obtiene una solución no prolongable a la derecha:
𝑦(𝑡) = sin (1
1 − 𝑡− 1 +
𝜋
4)
Es un ejemplo de solución que oscila en 𝑡 → 1 y no tiene límite. Los infinitos puntos
de acumulación de la gráfica para 𝑡 → 1 están en la frontera del dominio.
Observa que la unicidad falla para los valores iniciales 𝑦(𝑡0) = 1.

17
Por último, un resultado de prolongabilidad.
Sea 𝐷 dominio abierto de 𝐹 continua, tal que [𝑡0, 𝑡1] × ℝ𝑛 ⊂ 𝐷. Si ||𝐹|| acotada
por 𝑀, entonces cualquier solución no prolongable (𝑥, 𝐼) del problema del valor
inicial 𝑥(𝑡0) = 𝜉 alcanza el punto 𝑡 = 𝑡1.
Basta observar que para la solución no prolongable 𝑥(𝑡) se tiene la acotación
para todo 𝑡 ∈ 𝐼:
||𝑥(𝑡) − 𝜉|| ≤ 𝑀 · |𝑡 − 𝑡0|
De aquí se deduce que la solución es no prolongable ya que tiene que
abandonar el compacto 𝐾 = [𝑡0, 𝑡1] × 𝐵(𝜉,𝑀 · |𝑡1 − 𝑡0|) en un tiempo 𝑡 < sup 𝐼 y
tiene que hacerlo por los puntos (𝑡1, 𝑥), con lo cual 𝑡1 < sup 𝐼.
Lo que acabamos de utilizar es una comparación entre soluciones de dos
ecuaciones con mismo dato inicial: 𝑥′ = 𝐹(𝑡, 𝑥), 𝑥′ = 𝐺(𝑡, 𝑥). En este caso, 𝐺 = 𝑀.
Estos criterios de comparación pueden utilizarse con las desigualdades
cambiadas, para obligar a nuestra solución a irse al infinito antes de un tiempo
𝑡. Las soluciones de la ecuación auxiliar las denominamos barreras. Y de esto
trata el siguiente capítulo, del criterio de comparación de soluciones.

18
Lema (de Gronwall):
Sean las funciones continuas 𝑦, 𝑓, 𝑔: [𝑎, 𝑏] → ℝ con 𝑔(𝑡) ≥ 0 tales que se cumple:
𝑦(𝑡) ≤ 𝑓(𝑡) + ∫ 𝑔(𝑠) · 𝑦(𝑠) · 𝑑𝑠𝑡
𝑎
Entonces:
𝑦(𝑡) ≤ 𝑓(𝑡) + ∫ 𝑔(𝑢) · 𝑓(𝑢) · 𝑒∫ 𝑔(𝑠)·𝑑𝑠𝑡
𝑢 · 𝑑𝑢𝑡
𝑎
Hacemos algunas observaciones antes de demostrarlo.
Observación 0: El lema nos da una estimación de 𝑦 en la que 𝑦 no aparece en
el lado derecho, por lo tanto nos sirve para estimar soluciones de una
inecuación integral.
Observación 1: El término de la derecha en (2) es una iterante de Picard
asociada a la ecuación lineal homogénea 𝑥′(𝑡) = 𝑔(𝑡) · 𝑥(𝑡) cuya solución viene
dada por 𝑥(𝑡) = 𝑘 · 𝑒∫ 𝑔(𝑠)·𝑑𝑠𝑡
𝑎 . La idea pues, es definir ℎ(𝑡) = ∫ 𝑔(𝑠) · 𝑦(𝑠) · 𝑑𝑠𝑡
𝑎 y usar
una variación de parámetros ℎ(𝑡) = 𝑘(𝑡) · 𝑒∫ 𝑔(𝑠)·𝑑𝑠𝑡
𝑎 .
Observación 2: Si existiese igualdad:
𝑦(𝑡) = 𝑓(𝑡) + ∫ 𝑔(𝑠) · 𝑦(𝑠) · 𝑑𝑠𝑡
𝑎
Y si 𝑓 fuese derivable:
𝑦′(𝑡) = 𝑓′(𝑡) + 𝑔(𝑡) · 𝑦(𝑡)
Que es una ecuación lineal. Por tanto, resolviendo la homogénea:
𝑦′(𝑡)
𝑦(𝑡)= 𝑔(𝑡) ⟷ 𝑦(𝑡) = 𝑘 · 𝑒∫ 𝑔(𝑠)·𝑑𝑠
𝑡
𝑎
La no homogénea la resolveríamos tomando 𝑦(𝑡) = 𝑘(𝑡) · 𝑒∫ 𝑔(𝑠)·𝑑𝑠𝑡
𝑎 .
Esta idea es usada en la demostración. Veamos cómo exactamente.
Demostración:
Escribimos el término de la derecha de (2).
ℎ(𝑡) = ∫ 𝑔(𝑠) · 𝑦(𝑠) · 𝑑𝑠𝑡
𝑎
= 𝑘(𝑡) · 𝑒∫ 𝑔(𝑠)·𝑑𝑠𝑡
𝑎
Derivando ahora estas dos expresiones, por el TFC.
𝑔(𝑡) · 𝑦(𝑡) = 𝑘′(𝑡) · 𝑒∫ 𝑔(𝑠)·𝑑𝑠𝑡
𝑎 + 𝑘(𝑡) · 𝑒∫ 𝑔(𝑠)·𝑑𝑠𝑡
𝑎 · 𝑔(𝑡)
(𝟐)
(𝟑)
19
Utilizando (2).
𝑦(𝑡) ≤ 𝑓(𝑡) + ℎ(𝑡)
⟹ ℎ′(𝑡) = 𝑔(𝑡) · 𝑦(𝑡) ≤ 𝑔(𝑡)𝑓(𝑡) + 𝑔(𝑡)ℎ(𝑡)
Cosa que podemos decir usando que 𝑔(𝑡) ≥ 0
Ahora, por (3)
𝑘′(𝑡) · 𝑒∫ 𝑔(𝑠)·𝑑𝑠𝑡
𝑎 + ℎ(𝑡) · 𝑔(𝑡) ≤ 𝑔(𝑡)𝑓(𝑡) + 𝑔(𝑡)ℎ(𝑡)
𝑘′(𝑡) · 𝑒∫ 𝑔(𝑠)·𝑑𝑠𝑡
𝑎 ≤ 𝑔(𝑡)𝑓(𝑡)
𝑘′(𝑡) ≤ 𝑔(𝑡)𝑓(𝑡)𝑒−∫ 𝑔(𝑠)·𝑑𝑠𝑡
𝑎
𝑘(𝑡) ≤ ∫ 𝑔(𝑢)𝑓(𝑢)𝑒−∫ 𝑔(𝑠)𝑑𝑠𝑢
𝑎 𝑑𝑢𝑡
𝑎
Entonces:
ℎ(𝑡) = 𝑘(𝑡) · 𝑒∫ 𝑔(𝑠)·𝑑𝑠𝑡
𝑎 ≤ ∫ 𝑔(𝑢)𝑓(𝑢)𝑒−∫ 𝑔(𝑠)𝑑𝑠𝑢
𝑎 𝑑𝑢𝑡
𝑎
· 𝑒∫ 𝑔(𝑠)·𝑑𝑠𝑡
𝑎 =
= ∫ 𝑔(𝑢)𝑓(𝑢)𝑒∫ 𝑔(𝑠)𝑑𝑠𝑡
𝑢 𝑑𝑢𝑡
𝑎
Por tanto, sustituyendo:
𝑦(𝑡) ≤ 𝑓(𝑡) + ∫ 𝑔(𝑢)𝑓(𝑢)𝑒∫ 𝑔(𝑠)𝑑𝑠𝑡
𝑢 𝑑𝑢𝑡
𝑎
, ∎
Veamos un caso particular muy útil. Digamos que 𝑓(𝑡) = 𝐶. Entonces se deduce
que:
𝑦(𝑡) ≤ 𝐶 · 𝑒∫ 𝑔(𝑠)·𝑑𝑠𝑡
𝑎
Demostración:
Según el teorema:
𝑦(𝑡) ≤ 𝐶 + 𝐶 · ∫ 𝑔(𝑢)𝑒∫ 𝑔(𝑠)𝑑𝑠𝑡
𝑢 𝑑𝑢𝑡
𝑎
Observamos que dentro de la integral tenemos una derivada.
𝑑
𝑑𝑢(𝑒∫ 𝑔(𝑠)𝑑𝑠
𝑡
𝑢 ) = −𝑔(𝑢)𝑒∫ 𝑔(𝑠)𝑑𝑠𝑡
𝑢
Entonces denominando, para simplificar:
𝐹(𝑢) = 𝑒∫ 𝑔(𝑠)𝑑𝑠𝑡
𝑢

20
𝑦(𝑡) ≤ 𝐶 + 𝐶 · ∫ (−𝐹(𝑢)) · 𝑑𝑢𝑡
𝑎
= 𝐶 + 𝐶 · (𝐹(𝑎) − 𝐹(𝑡)) = 𝑦(𝑡) ≤ 𝐶 · 𝑒∫ 𝑔(𝑠)·𝑑𝑠𝑡
𝑎
En este corolario estamos comparando 𝑦(𝑡) con la solución del problema de
valores iniciales 𝑥′(𝑡) = 𝑔(𝑡) · 𝑥(𝑡) con dato inicial 𝑥(𝑎) = 𝐶. Esto sugiere una
prueba alternativa del lema de Gronwall basada en propiedades de
monotonicidad del operador iterante de Picard.
Lema:
Sea 𝑔: [𝑎, 𝑏] → [0,+∞) continua y 𝛽: [𝑎, 𝑏] → ℝ continua. Supongamos que
𝑦: [𝑎, 𝑏] → ℝ continua y verifica para todo 𝑡 ∈ [𝑎, 𝑏]:
𝑦(𝑡) ≤ ∫ (𝑔(𝑠)𝑦(𝑠) + 𝛽(𝑠)) · 𝑑𝑠𝑡
𝑎
Entonces:
𝑦(𝑡) ≤ ∫ 𝛽(𝑢)𝑒∫ 𝑔(𝑠)·𝑑𝑠𝑡
𝑢 𝑑𝑢𝑡
𝑎
Demostración:
Para una función ℎ(𝑡) ∈ 𝒞[𝑎, 𝑏] se definió el iterante de Picard correspondiente al
problema de valores iniciales:
{𝑧′ = 𝑔(𝑡) · 𝑧 + 𝛽(𝑡)
𝑧(𝑎) = 0
Como:
𝑇ℎ(𝑡) = ∫ (𝑔(𝑠)ℎ(𝑠) + 𝛽(𝑠)) · 𝑑𝑠𝑡
𝑎
Pues bien, este operador es monótono. Suponiendo que ℎ1(𝑡) − ℎ2(𝑡) ≥ 0 para
cualquier 𝑡 del intervalo de definición, entonces𝑇ℎ1 − 𝑇ℎ2 ≥
La hipótesis del lema dice que:
𝑦(𝑡) ≤ 𝑇𝑦(𝑡)
Aplicando 𝑇 repetidas veces tenemos que:
𝑦(𝑡) ≤ 𝑇𝑦(𝑡) ≤ ⋯ ≤ 𝑇𝑘𝑦(𝑡)
Y sabemos que la sucesión de iterantes converge uniformemente a la solución
del problema lineal. Es decir:
𝑦(𝑡) ≤ ∫ 𝛽(𝑢)𝑒∫ 𝑔(𝑠)𝑑𝑠𝑡
𝑢 𝑑𝑢𝑡
𝑎

21
El lema de Gronwall se obtiene de lo anterior con el cambio �̃�(𝑡) = 𝑦(𝑡) − 𝑓(𝑡).
QED.
Observación: 𝛽(𝑠) = 𝑓(𝑠)𝑔(𝑠)
Teorema (de las soluciones aproximadas de la ecuación):
Sea 𝐹 una función 𝐿-Lipschitz.
Supongamos 𝑥1(𝑡), 𝑥2(𝑡) dos soluciones aproximadas al sistema 𝑥′(𝑡) = 𝐹(𝑡, 𝑥),
quiere decirse:
||𝑥1′ − 𝐹(𝑡, 𝑥1(𝑡))|| ≤ 휀1
||𝑥2′ − 𝐹(𝑡, 𝑥2(𝑡))|| ≤ 휀2
𝑡 ∈ [𝑎, 𝑏]
Con un error 𝛿 en el dato inicial: ||𝑥1(𝑎) − 𝑥2(𝑎)|| ≤ 𝛿
Entonces:
||𝑥1(𝑡) − 𝑥2(𝑡)|| ≤ 𝛿 · 𝑒𝐿(𝑡−𝑎) + (휀1 + 휀2) ·
𝑒𝐿(𝑡−𝑎) − 1
𝐿
Demostración:
Sea 𝑦(𝑡) = 𝑥1(𝑡) − 𝑥2(𝑡)
Entonces:
||𝑦(𝑡)|| = ||𝑥1(𝑡) − 𝑥2(𝑡)|| = ||𝑥1(𝑎) +∫ 𝑥1′(𝑠)𝑑𝑠
𝑡
𝑎
− 𝑥2(𝑎) − ∫ 𝑥2′ (𝑠)𝑑𝑠
𝑡
𝑎
|| =
= ||𝑥1(𝑎) + ∫ 𝐹(𝑠, 𝑥1(𝑠))𝑑𝑠𝑡
𝑎
− 𝑥2(𝑎) − ∫ 𝐹(𝑠, 𝑥2(𝑠))𝑑𝑠𝑡
𝑎
|| ≤
≤ 𝛿 +∫ ||𝐹(𝑠, 𝑥1(𝑠)) − 𝐹(𝑠, 𝑥2(𝑠))|| 𝑑𝑠𝑡
𝑎
+ (휀1 + 휀2)(𝑡 − 𝑎) ≤
≤ 𝛿 +∫ 𝐿 · ||𝑦(𝑠)||𝑑𝑠𝑡
𝑎
+ (휀1 + 휀2)(𝑡 − 𝑎)

22
Utilizando el lema de Gronwall en ||𝑦(𝑡)||:
||𝑦(𝑡)|| ≤ 𝛿 + (휀1 + 휀2)(𝑡 − 𝑎) + ∫ (𝛿 + (휀1 + 휀2)(𝑠 − 𝑎)) · 𝐿 · 𝑒∫ 𝐿𝑑𝑢𝑡
𝑠 𝑑𝑠𝑡
𝑎
=
Evaluando la integral y operando:
= 𝛿 · 𝑒𝐿(𝑡−𝑎) + (휀1 + 휀2) ·𝑒𝐿(𝑡−𝑎) − 1
𝐿
QED.
Un ejemplo de esto: la ecuación del péndulo.
𝑥′′ + 𝜆 sin(𝑥) = 0
Donde 𝑥(𝑡) es la desviación angular respecto de la posición de equilibrio, pero
no sabemos integrarla. Entonces, suponiendo pequeñas oscilaciones de modo
que 𝑥~sin (𝑥), sustituimos en la fórmula su aproximación lineal:
𝑥′′ + 𝜆𝑥 = 0
Y eso sí que sabemos integrarlo. Estamos comparando las soluciones de dos
ecuaciones distintas.
(1) {
𝑥′′ + 𝜆 sin(𝑥) = 0𝑥′(0) = 𝑣0𝑥(0) = 𝑥0
, (2) {
𝑦′′ + 𝜆𝑦 = 0
𝑦′(0) = 𝑣0𝑦(0) = 𝑥0
Con mismos datos iniciales pues. Y queremos ver cómo se aproxima 𝑥 a 𝑦 para
tiempos pequeños. Estamos buscando entonces soluciones aproximadas. El
problema se plantea como:
{𝑥′ = 𝑓1(𝑡, 𝑥)
𝑥(𝑡0) = 𝜉0, {
𝑦′ = 𝑓2(𝑡, 𝑥)
𝑦(𝑡0) = 𝜉1
Donde 𝑓2 es una aproximación de 𝑓1 y los datos 𝜉0, 𝜉1 están próximos: es un error
en la medida. Entonces: ¿Cómo de cerca están 𝑥, 𝑦?
Ejercicio: Usar el teorema de las soluciones aproximadas para estimar el error del
caso no lineal respecto de la linealización.

23
Vamos a estudiar ahora el problema de la dependencia de parámetros y
condiciones iniciales. Veamos un ejemplo que lo ilustra. Consideremos de nuevo
la ecuación del péndulo.
𝑥′′ + 𝜆 sin(𝑥) = 0
Aquí, 𝜆 es un parámetro que depende de la elongación del péndulo. (Más
concretamente, 𝜆 = 𝑔/𝐿)
Datos iniciales:
{𝑥(0) = 𝜉0𝑥′(0) = 𝑣0
{𝑥1(𝑡) = 𝑥(𝑡)
𝑥2(𝑡) = 𝑥′(𝑡)→ {
𝑥1′(𝑡) = 𝑥(𝑡)
𝑥2(𝑡) = 𝑥′′ = 𝜆 · sin (𝑥1)
⟹ (𝑥1𝑥2)′
= (𝑥2
𝜆 sin(𝑥1)) , (
𝑥1(0)
𝑥2(0)) = (
𝜉0𝑣0)
La solución 𝑥1𝑥2 depende de 𝑔, 𝐿. ¿Cómo se comporta la solución ante cambios
en dichos parámetros?¿Y ante variaciones en los valores iniciales?
Empezamos con una consecuencia directa del lema de dependencia continua
de las condiciones iniciales (página 8):
Teorema (de dependencia Lipschitz de los parámetros iniciales):
Sea 𝐹 localmente Lipschitz respecto de las variables 𝑥 en un abierto 𝐷.
Sea una solución 𝑥 del problema de valores iniciales con dato 𝑥(𝑡0) = 𝜉0 en el
intervalo [𝑡0, 𝑡1].
Entonces existe 𝑟 > 0 tal que la solución del problema con datos iniciales:
𝑦(𝑡0) = 𝜉1, ||𝜉0 − 𝜉1|| < 𝑟
Está definida en el intervalo [𝑡0, 𝑡1], y en dicho intervalo verifica:
||𝑥(𝑡) − 𝑦(𝑡)|| ≤ 𝑒𝐿(𝑡−𝑡0) · ||𝜉0 − 𝜉1||
Demostración:
Existe un entorno compacto 𝐾 de la gráfica de 𝑥 contenido en 𝐷, de manera
que existe 𝜌 > 0 tal que {(𝑡, 𝐵(𝑥(𝑡), 𝜌)) : 𝑡 ∈ [𝑡0, 𝑡1]} ⊂ 𝐾. Consideremos la
constante de Lipschitz 𝐿 de 𝐹 en 𝐾. La elección 𝑟 = 𝑒−𝐿(𝑡1−𝑡0) · 𝜌 y el lema nos
aseguran que, a la derecha de 𝑡0:
||𝑥(𝑡) − 𝑦(𝑡)|| ≤ 𝑒𝐿(𝑡−𝑡0) · ||𝜉0 − 𝜉1|| ≤ 𝑒𝐿(𝑡−𝑡1)𝜌
Lo cual quiere decir que 𝑦 prolongable hasta 𝑡 = 𝑡1 y su gráfica permanece en
𝐾 hasta el valor 𝑡 = 𝑡1, y así tenemos la estimación en [𝑡0, 𝑡1]
||𝑥(𝑡) − 𝑦(𝑡)|| ≤ 𝑒𝐿(𝑡−𝑡0) · ||𝜉0 − 𝜉1||

24
Fig 7. La pertenencia a 𝐾 nos asegura que 𝑦 prolongable hasta 𝑡1 y aplicando el lema de condiciones
iniciales surge la aproximación que da el teorema.
Teorema (de dependencia continua con respecto a parámetros):
Sea:
𝐹:𝐷 ⊂ ℝ𝑡 ×ℝ𝑥𝑛 × ℝ𝜆
𝑚 → ℝ𝑛
Continua en 𝐷 abierto, y localmente Lipschitz respecto de la variable 𝑥 en todos
los puntos de 𝐷. Quiere decirse: localmente existe 𝐿 de tal manera que:
||𝐹(𝑡, 𝑥; 𝜆) − 𝐹(𝑡, 𝑦; 𝜆)|| ≤ 𝐿 · ||𝑥 − 𝑦||
Consideramos las soluciones 𝑥(𝑡, 𝜆) del problema:
𝑃𝜆 {𝑥′ = 𝐹(𝑡, 𝑥; 𝜆)
𝑥(𝑡0) = 𝜉0
Si existe solución del problema para 𝜆 = 𝜆0, sea 𝑥(𝑡, 𝜆0) en el intervalo 𝐽 a la
derecha de 𝑡0, 𝐽 = [𝑡0, 𝑡0 + ℎ], de forma que la gráfica (𝑡, 𝑥(𝑡), 𝜆0) ∈ 𝐷, ∀𝑡 ∈ 𝐽.
Entonces existe 휀 > 0 tal que si |𝜆 − 𝜆0| ≤ 휀 existe solución 𝑥(𝑡, 𝜆) en 𝐽, y además:
lim𝜆→𝜆0
𝑥(𝑡, 𝜆) = 𝑥(𝑡, 𝜆0)
𝐷
ℝ𝑛
ℝ 𝑡0 𝑡1
𝜉0 𝜉1
2𝜌
𝐾

25
Demostración:
Por el teorema de existencia y unicidad sabemos que 𝑥(𝑡, 𝜆) está definida en el
intervalo [𝑡0 − 𝛿, 𝑡0 + 𝛿]. Trataremos de probar una estimación de:
||𝑥(𝑡, 𝜆) − 𝑥(𝑡, 𝜆0)||
Que usaremos para prolongar la solución al intervalo 𝐽 tomando 𝜖
suficientemente pequeño.
Al igual que en el teorema anterior, la gráfica 𝑥(𝑡, 𝜆0) en 𝑡 ∈ [𝑡0, 𝑡0 + ℎ] tiene un
entorno compacto 𝐾 = {(𝑡, 𝜉): 𝜉 ∈ 𝐵(𝑥(𝑡, 𝜆0), 𝜌)} tal que 𝐾 × 𝐵(𝜆0, 𝜌) ⊂ 𝐷.
Denotamos 𝐷𝜆 ⊂ ℝ𝑡 × ℝ𝑥𝑛 al dominio de definición de 𝐹𝜆 = 𝐹(·,·, 𝜆).
Todas estas funciones son Lipschitz constante 𝐿 uniforme en 𝐾 para todos esos
valores de 𝜆.
Sea 𝑦(𝑡) = 𝑥(𝑡, 𝜆) − 𝑥(𝑡, 𝜆0),
𝑥′(𝑡, 𝜆) − 𝐹(𝑡, 𝑥(𝑡, 𝜆); 𝜆) = 𝑥′(𝑡, 𝜆0) − 𝐹(𝑡, 𝑥(𝑡, 𝜆0); 𝜆0) = 0
𝑦′(𝑡) = 𝑥′(𝑡, 𝜆) − 𝑥′(𝑡, 𝜆0) = 𝐹(𝑡, 𝑥(𝑡, 𝜆); 𝜆) − 𝐹(𝑡, 𝑥(𝑡, 𝜆0); 𝜆0)
No podemos asegurar que esto tienda a cero en 𝜆 → 𝜆0 porque necesitamos
controlar el comportamiento de las soluciones.
Usando esta última ecuación diferencial:
||𝑦(𝑡)|| ≤ ∫ ||𝐹(𝑠, 𝑥(𝑠, 𝜆0); 𝜆0) − 𝐹(𝑠, 𝑥(𝑠, 𝜆0); 𝜆)|| · 𝑑𝑠𝑡
𝑡0
+
+∫ ||𝐹(𝑠, 𝑥(𝑠, 𝜆0); 𝜆) − 𝐹(𝑠, 𝑥(𝑠, 𝜆); 𝜆)|| · 𝑑𝑠𝑡
𝑡0
≤
≤ sup𝑠∈[𝑡0,𝑡0+ℎ]
||𝐹(𝑠, 𝑥(𝑠, 𝜆0); 𝜆0) − 𝐹(𝑠, 𝑥(𝑠, 𝜆0); 𝜆)|| · |𝑡 − 𝑡0| + 𝐿 · ∫ ||𝑦(𝑠)|| · 𝑑𝑠𝑡
𝑡0
Que resumimos en:
||𝑦(𝑡)|| ≤ 𝐶(𝜆) · (𝑡 − 𝑡0) + 𝐿 · ∫ ||𝑦(𝑠)|| · 𝑑𝑠𝑡
𝑡0
Usando Gronwall, obtenemos:
||𝑦(𝑡)|| ≤ 𝐶(𝜆) ·𝑒𝐿(𝑡−𝑡0) − 1
𝐿
Si |𝜆 − 𝜆0| suficientemente pequeño, por continuidad uniforme de 𝐹 (por
compacidad), podemos hacer 𝐶(𝜆) tan pequeño como se quiera para que
𝑥(𝑡, 𝜆) no salga de 𝐾 antes de 𝑡 = 𝑡0 + ℎ. Esto prueba la prolongabilidad de 𝑥(𝑡, 𝜆)
a [𝑡0, 𝑡0 + ℎ]. La convergencia 𝑥(𝑡, 𝜆) → 𝑥(𝑡, 𝜆0) se deduce de la estimación ya
que 𝐶(𝜆) → 0 en 𝜆 → 𝜆0.
QED

26
Fig 8: De forma análoga al otro teorema, se puede probar que si 𝜆, 𝜆0 están suficientemente cerca,
entonces 𝑥(𝑡, 𝜆) no sale del compacto que genera la solución 𝑥(𝑡, 𝜆0) que existe localmente por
teorema de unicidad y existencia y es prolongable a 𝑡0 + ℎ
A continuación se estudia la diferenciabilidad respecto a parámetros y
condiciones iniciales.
Teorema (de diferenciabilidad de Peano o de dependencia diferenciable
respecto de parámetros):
Supongamos 𝐹:𝐷 ⊂ ℝ𝑡 × ℝ𝑥𝑛 × ℝ𝜆
𝑚 → ℝ𝑛 continua en un abierto 𝐷 y diferenciable
respecto de 𝑥, 𝜆 con derivadas parciales continuas.
Entonces, si existe solución 𝑃𝜆0 para 𝜆0 fijo definida en 𝐽 = [𝑡0 − ℎ, 𝑡0 + ℎ] existe un
휀 > 0 tal que si |𝜆 − 𝜆0| < 휀 entonces la solución de 𝑃𝜆 existe en 𝐽.
Además, dicha solución 𝑥(𝑡, 𝜆) es derivable respecto 𝜆 en el punto 𝜆 = 𝜆0 y su
derivada parcial
𝐷𝜆𝑗𝑥(𝑡, 𝜆) = 𝑦𝑗(𝑡) =𝜕𝑥
𝜕𝜆𝑗(𝑡)
Cumple el sistema:
𝐸𝐷 {𝑦𝑗′(𝑡) = 𝐷𝑥𝐹(𝑡, 𝑥(𝑡, 𝜆0); 𝜆0) · 𝑦(𝑡) + 𝐷𝜆𝑗𝐹(𝑡, 𝑥(𝑡, 𝜆0); 𝜆0)
𝑦𝑗(𝑡0) = 0
𝑡0 𝑡0 + ℎ
λ0
λ0 + 𝜌
ℝλ𝑚
ℝ𝑡
ℝ𝑥𝑛
𝐾
𝐾 × 𝐵(𝜆0, 𝜌)

27
Veamos tan sólo de dónde sale ED.
Ecuación de 𝑥(𝑡, 𝜆)
𝑑𝑥
𝑑𝑡(𝑡, 𝜆) = 𝐹(𝑡, 𝑥(𝑡, 𝜆); 𝜆)
𝑥(𝑡0, 𝜆) = 𝜉0
Si derivamos respecto de 𝜆𝑗:
𝑑
𝑑𝑡(𝐷𝜆𝑗𝑥(𝑡, 𝜆)) =
𝑑
𝑑𝑡𝑦(𝑡) = 𝐷𝑥𝐹(𝑡, 𝑥(𝑡, 𝜆)) · 𝐷𝜆𝑗𝑥(𝑡, 𝜆) + 𝐷𝜆𝑗𝐹(𝑡, 𝑥(𝑡, 𝜆); 𝜆)
Si hacemos 𝜆 = 𝜆0 en 𝐷𝜆𝑥(𝑡, 𝜆) obtenemos 𝑦(𝑡).
Veamos un ejemplo de todo esto.
𝑃𝜆 {𝑥′ = 2𝑡𝑥 + 2𝜆𝑡 · sin(𝑥)
𝑥(0) = 1
1. Consideramos la solución en 𝜆 = 0
⟹ 𝑥(𝑡, 0) = 𝑒𝑡2
2. Calculamos cómo depende de 𝜆 alrededor de 𝜆 = 0. Para ello
calculamos:
𝜕𝑥(𝑡, 𝜆)
𝜕𝜆|𝜆=0
3. 𝑥(𝑡, 𝜆) estará definido si 𝜆 es pequeño en cualquier intervalo acotado
[−𝑁,𝑁] alrededor de 𝑡 = 0.
Llamemos:
𝑦(𝑡) =𝜕𝑥(𝑡, 𝜆)
𝜕𝜆|𝜆=0
Que es solución de la ecuación paramétrica.
𝑦′(𝑡) = 𝐷𝑥𝐹(𝑡, 𝑥(𝑡, 0); 0) · 𝑦(𝑡) + 𝐷𝜆𝐹(𝑡, 𝑥(𝑡, 0); 0)
𝑦′(𝑡) = (2𝑡 + 𝑡𝜆 cos(x)) · 𝑦(𝑡) + 𝑡 · sin (𝑥)
Particularizando para 𝑥(𝑡, 0) = 𝑒𝑡2, 𝜆 = 0

28
Entonces:
{𝑦′(𝑡) = 2𝑡 · 𝑦(𝑡) + 𝑡 · sin (𝑒𝑡
2)
𝑦(0) = 0
Que es una ecuación lineal homogénea que se puede integrar.
Teorema (de dependencia diferenciable respecto a valores iniciales):
Sea 𝐹:𝐷 ⊂ ℝ𝑡 × ℝ𝑥𝑛 → ℝ𝑛 con 𝐷 abierto y 𝐹 tiene derivadas parciales continuas
respecto de la variable 𝑥. Consideremos el problema para (𝑡0, 𝜉) ∈ 𝐷:
𝑃𝜉
{
𝑥′(𝑡, 𝜉) = 𝐹(𝑡, 𝑥(𝑡, 𝜉))
𝑥(𝑡0) = 𝜉 = (𝜉1⋮𝜉𝑛
)
Suponemos que para 𝜉 = 𝜉0 fjo el problema 𝑃𝜉 tiene solución única en el
intervalo cerrado 𝐽 alrededor de 𝑡0.
Entonces:
1) Existe 휀 > 0 tal que 𝑃𝜉 tiene solución única en 𝐽, digamos 𝑥 = 𝑥(𝑡, 𝜉),
siempre que ||𝜉 − 𝜉0|| < 휀.
2) La solución es diferenciable en 𝜉 = 𝜉0
3) Si
𝑧𝑗(𝑡) =𝜕𝑥(𝑡, 𝜉)
𝜕𝜉𝑗
Donde 𝐷𝑥𝐹 representa la matriz diferencial de 𝐹 respecto de 𝑥, entonces
estas derivadas parciales cumplen la llamada ecuación variacional:
{
𝑧𝑗′(𝑡) = 𝐷𝑥𝐹(𝑡, 𝑥(𝑡, 𝜉0)) · 𝑧𝑗(𝑡)
𝑧𝑗(𝑡0) =
(
0⋮010⋮0)
= 𝑒𝑗, (j-ésimo vector canónico)

29
Observaciones:
1. Este teorema es completamente análogo al de dependencia de
parámetros. De hecho el teorema de dependencia de valores iniciales
se puede reducir al de parámetros, y viceversa, mediante el cambio:
𝑦(𝑡, 𝑡0, 𝜉) = 𝑥(𝑡, 𝑡0, 𝜉) − 𝜉
Así tenemos que 𝑦(𝑡, 𝑡0, 𝜉) es solución del sistema:
{𝑦′(𝑡, 𝜉) = 𝐹(𝑡, 𝑦(𝑡, 𝜉) + 𝜉)
𝑦(𝑡0) = 0
Por el teorema de derivación paramétrica se tiene:
{
𝜕𝑦𝑗′(𝑡)
𝜕𝜉𝑗= 𝐷𝑥𝐹(𝑡, 𝑦𝑗(𝑡, 𝜉) + 𝜉) (
∂yj(𝑡)
𝜕𝜉𝑗+ 𝑒𝑗)
∂yj(𝑡)
𝜕𝜉𝑗|𝑡0
= 0
Como tenemos:
∂yj(𝑡)
𝜕𝜉𝑗+ 𝑒𝑗 = 𝑧𝑗(𝑡)
Entonces:
{𝑧𝑗′(𝑡) = 𝐷𝑥𝐹(𝑡, 𝑥)𝑧𝑗𝑧𝑗(𝑡0) = 𝑒𝑗
La reducción en el otro sentido se realiza introduciendo los parámetros
como nuevas variables.
𝑥𝑛+1 = 𝜆1, … , 𝑥𝑛+𝑚 = 𝜆𝑚
Por consiguiente, se añadirán las ecuaciones diferenciales:
𝑥𝑛+1′ = 0,… , 𝑥𝑛+𝑚
′ = 0
Y el sistema queda para las funciones incógnitas �̃� = (𝑥1, … , 𝑥𝑛+𝑚):
{
�̃�′ = �̃�(𝑡, �̃�)
�̃�(𝑡0) = (
𝜉0𝜆1⋮𝜆𝑚
)

30
Las últimas 𝑚 componentes de 𝐹:𝐷 ⊂ ℝ ×ℝ𝑛+𝑚 → ℝ𝑛+𝑚 son
evidentemente nulas.
2. La matriz Φ(𝑡) = 𝐷𝜉𝑥(𝑡, 𝜉)|𝜉=𝜉0 cuyas columnas son las derivadas parciales
respecto a 𝜉𝑗 es solución fundamental normalizada en 𝑡 = 𝑡0 del sistema
de 𝑛 ecuaciones diferenciales lineales que, entonces cumple |Φ(𝑡)| ≠ 0
en todo el intervalo de definición.
3. La aplicación
𝜉 ∈ ℝ𝑛 → 𝜑𝑡(𝜉) = 𝑥(𝑡, 𝜉)
Cumple que tiene diferencial en 𝜉0 con determinante que nunca se
anula, por consiguiente, mediante el teorema de la función inversa, se
puede decir que es una aplicación localmente invertible en un entorno
de 𝜉0.
En caso de ser el sistema original un sistema autónomo 𝐹(𝑡, 𝑥) = 𝐹(𝑥) se
dice que 𝜑𝑡 representa el flujo del campo de vectores 𝐹(𝑥) y es un
difeomorfismo local en un entorno de 𝜉0. Es interesante observar cómo
este difeomorfismo local cambia el volumen:
𝑑
𝑑𝑡|Φ| = traza (𝐷𝑥𝐹(𝑥(𝑡, 𝜉0))) · |Φ| = div(𝐹) · |Φ|
Demostración:
Utilizamos el resultado obtenido del teorema de dependencia Lipschitz respecto
a los datos iniciales (página 23). Elegimos 𝜖 < 𝑟 en dicho teorema, de manera
que nos aseguramos la existencia de solución con dato inicial 𝜉 en [𝑡1, 𝑡2].
Designemos 𝜑(𝑡) = 𝑥(𝑡, 𝜉0) y consideremos el compacto 𝐾 del mencionado
teorema.
Observemos la diferenciabilidad uniforme de 𝐹. Es decir: dado 𝛿 > 0 existe un
𝜏𝐹 > 0 de tal manera que, para todo (𝑡, 𝑥), (𝑡, 𝑦) ∈ 𝐾 con ||𝑥 − 𝑦|| ≤ 𝜏𝐹 se tiene
que:
||𝐹(𝑡, 𝑥) − 𝐹(𝑡, 𝑦) − 𝐷𝑥𝐹(𝑡, 𝑥)(𝑥 − 𝑦)|| ≤ 𝛿||𝑥 − 𝑦||
En efecto:
||𝐹(𝑡, 𝑥) − 𝐹(𝑡, 𝑦) − 𝐷𝑥𝐹(𝑡, 𝑥)(𝑥 − 𝑦)|| =
= ||𝐹(𝑡, 𝑦) − 𝐷𝑥𝐹(𝑡, 𝑥) · 𝑦 − (𝐹(𝑡, 𝑥) − 𝐷𝑥𝐹(𝑡, 𝑥) · 𝑥)|| =
= ||𝐹(𝑡, 𝑧) − 𝐷𝑥𝐹(𝑡, 𝑥) · 𝑧|𝑧=𝑦 − (𝐹(𝑡, 𝑧) − 𝐷𝑥𝐹(𝑡, 𝑥) · 𝑧|𝑧=𝑥)|| ≤𝑇𝑉𝑀
≤ ||𝑥 − 𝑦|| · sup𝑥≤𝑧≤𝑦
||𝐷𝑥𝐹(𝑡, 𝑧) − 𝐷𝑥𝐹(𝑡, 𝑥)||

31
Por continuidad uniforme (por compacidad) podemos encontrar 𝜏𝐹 > 0 tal que:
sup𝑥≤𝑧≤𝑦
||𝐷𝑥𝐹(𝑡, 𝑧) − 𝐷𝑥𝐹(𝑡, 𝑥)|| ≤ 𝛿
En ||𝑥 − 𝑧|| ≤ ||𝑥 − 𝑦|| ≤ 𝜏𝐹.
Consideremos entonces la aplicación flujo:
𝑥: [𝑡0, 𝑡1] × 𝐵(𝜉0, 𝜏𝐹) → 𝐾
Definida como 𝑥(𝑡, 𝜉) para la solución con dato inicial 𝜉.
Tomamos la matriz Φ de la observación 2 y probamos la diferenciabilidad de la
aplicación 𝑥 respecto de 𝜉 evaluada en 𝜉0, y que de hecho la diferencial es Φ,
solución de la ecuación variacional. Quiere decirse, tratamos de probar que:
||𝑥(𝑡, 𝜉) − 𝑥(𝑡, 𝜉0) − Φ(𝑡) · (𝜉 − 𝜉0)|| = 𝑜||𝜉 − 𝜉0||
En 𝜉 → 𝜉0 (notación “o pequeña” de Landau). Utilizamos la siguiente expresión
para la derivada de la inversa de una matriz:
𝑑
𝑑𝑡Φ−1 = −Φ−1
𝑑Φ
𝑑𝑡Φ−1
De donde se deduce:
𝑑Φ−1
𝑑𝑡= −Φ−1 · 𝐷𝑥𝐹(𝑡, 𝜑(𝑡))
Entonces:
||𝑑 (Φ−1(𝑡) · (𝑥(𝑡, 𝜉) − 𝑥(𝑡, 𝜉0) − Φ(𝑡) · (𝜉 − 𝜉0)))
𝑑𝑡|| = ||
𝑑 (Φ−1(𝑡) · (𝑥(𝑡, 𝜉) − 𝑥(𝑡, 𝜉0)))
𝑑𝑡||
= |Φ−1(𝑡) · (𝐹 (𝑡, 𝑥(𝑡, 𝜉) − 𝐹(𝑡, 𝜑(𝑡)) − 𝐷𝑥𝐹(𝑡, 𝜑(𝑡)) · (𝑥(𝑡, 𝜉) − 𝜑(𝑡)))|| ≤
Las matrices Φ,Φ−1 están acotadas en 𝐾 por 𝐶 debido a la diferenciabilidad
uniforme de 𝐹.
≤ 𝐶 · 𝜖 · ||𝑥(𝑡, 𝜉) − 𝜑(𝑡)||
Y por el lema de dependencia Lipschitz respecto de los valores iniciales,
tomando ||𝜉 − 𝜉0|| lo suficientemente pequeño hacemos la expresión anterior,
no mayor que:
𝐶 · 𝜖 · 𝑒𝐿·(𝑡1−𝑡0) · ||𝜉 − 𝜉0||
Lo cual prueba que:
||𝑥(𝑡, 𝜉) − 𝑥(𝑡, 𝜉0) − Φ(𝑡)(𝜉 − 𝜉0)|| ≤ 𝐶 · 𝜖 · 𝑒𝐿·(𝑡1−𝑡0) · ||𝜉 − 𝜉0||(𝑡 − 𝑡0)
Y, por tanto, la diferenciabilidad de 𝑥 respecto 𝜉.

32
Probamos ahora la continuidad de Φ respecto 𝜉. Denotamos:
Φ1 = Φ(𝑡, 𝜉1)
Φ2 = Φ(𝑡, 𝜉2)
Un cálculo análogo al anterior demuestra que:
𝑑
𝑑𝑡Φ2−1Φ1 = Φ2
−1 (𝐷𝑥𝐹(𝑡, 𝑥(𝑡, 𝜉2))) − (𝐷𝑥𝐹(𝑡, 𝑥(𝑡, 𝜉1)))Φ1−1
La ecuación variacional tiene matriz de coeficientes acotada por 𝐿 (cota de
||𝐷𝑥𝐹|| en 𝐾), y por consiguiente:
||Φ𝑗(𝑡)±1|| ≤ 𝜖𝐿(𝑡−𝑡0)
Por tanto:
||𝑑
𝑑𝑡(Φ2
−1Φ2)|| ≤ 𝑒2𝐿(𝑡1−𝑡0) ||𝐷𝑥𝐹(𝑡, 𝑥(𝑡, 𝜉2)) − 𝐷𝑥𝐹(𝑡, 𝑥(𝑡, 𝜉1))||
Finalmente:
||Φ1 −Φ2|| ≤ ||Φ2(Φ2−1Φ1 − 𝐼)|| ≤ 𝑒
3𝐿(𝑡1−𝑡0)∫ ||𝐷𝑥𝐹(𝑡, 𝑥(𝑡, 𝜉2)) − 𝐷𝑥𝐹(𝑡, 𝑥(𝑡, 𝜉1))|| 𝑑𝑡𝑡1
𝑡0
La continuidad se sigue d ela continuidad e 𝐷𝑥𝐹, 𝑥(𝑡, 𝜉).
QED

33
Pablo Esquer Castillo
Mayo 2017