Download - producto parcial 2

Jesús Alberto B1
Campos Arjona
Revista de
computación
Creaciones de
grandes computadoras.
Sofisticados robots
Tabletas de última generación

Una computadora o computador (del inglés computer y este del latín computare -calcular), también denominada ordenador (del francés
ordinateur, y este del latín ordinator), es una máquina electrónica que
recibe y procesa datos para convertirlos en información útil. Una computadora es una colección de circuitos integrados y otros
componentes relacionados que puede ejecutar con exactitud, rapidez y
de acuerdo a lo indicado por un usuario o automáticamente por otro
programa, una gran variedad de secuencias o rutinas de instrucciones que son ordenadas, organizadas y sistematizadas en función a una
amplia gama de aplicaciones prácticas y precisamente determinadas,
proceso al cual se le ha denominado con el nombre de programación y al que lo realiza se le llama programador. La computadora, además de
la rutina o programa informático, necesita de datos específicos (a
estos datos, en conjunto, se les conoce como "Input" en inglés o de
entrada) que deben ser suministrados, y que son requeridos al momento de la ejecución, para proporcionar el producto final del
procesamiento de datos, que recibe el nombre de "output" o de salida.
La información puede ser entonces utilizada, reinterpretada, copiada, transferida, o retransmitida a otra(s) persona(s), computadora(s) o
componente(s) electrónico(s) local o remotamente usando diferentes
sistemas de telecomunicación, pudiendo ser grabada, salvada o
almacenada en algún tipo de dispositivo o unidad de almacenamiento.
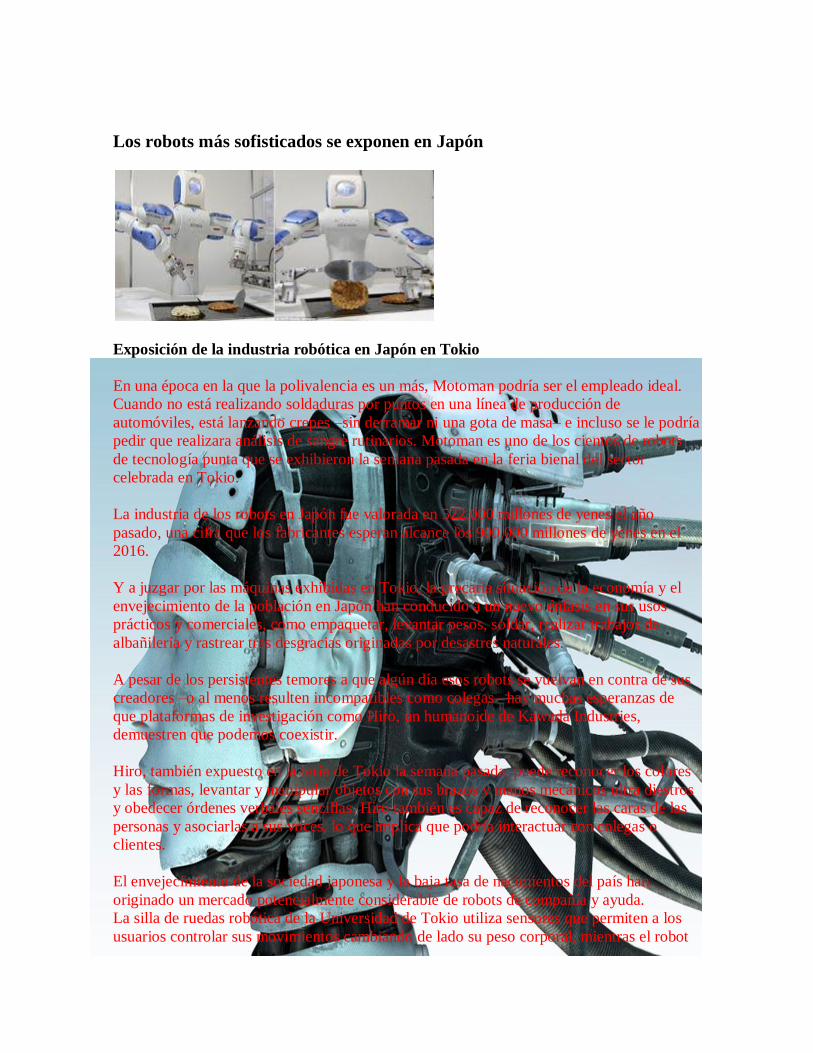
Los robots más sofisticados se exponen en Japón
Exposición de la industria robótica en Japón en Tokio
En una época en la que la polivalencia es un más, Motoman podría ser el empleado ideal.
Cuando no está realizando soldaduras por puntos en una línea de producción de
automóviles, está lanzando crepes –sin derramar ni una gota de masa– e incluso se le podría
pedir que realizara análisis de sangre rutinarios. Motoman es uno de los cientos de robots
de tecnología punta que se exhibieron la semana pasada en la feria bienal del sector
celebrada en Tokio.
La industria de los robots en Japón fue valorada en 522.000 millones de yenes el año
pasado, una cifra que los fabricantes esperan alcance los 900.000 millones de yenes en el
2016.
Y a juzgar por las máquinas exhibidas en Tokio, la precaria situación de la economía y el
envejecimiento de la población en Japón han conducido a un nuevo énfasis en sus usos
prácticos y comerciales, como empaquetar, levantar pesos, soldar, realizar trabajos de
albañilería y rastrear tras desgracias originadas por desastres naturales.
A pesar de los persistentes temores a que algún día esos robots se vuelvan en contra de sus
creadores –o al menos resulten incompatibles como colegas– hay muchas esperanzas de
que plataformas de investigación como Hiro, un humanoide de Kawada Industries,
demuestren que podemos coexistir.
Hiro, también expuesto en la feria de Tokio la semana pasada, puede reconocer los colores
y las formas, levantar y manipular objetos con sus brazos y manos mecánicos ultra diestros
y obedecer órdenes verbales sencillas. Hiro también es capaz de reconocer las caras de las
personas y asociarlas a sus voces, lo que implica que podría interactuar con colegas o
clientes.
El envejecimiento de la sociedad japonesa y la baja tasa de nacimientos del país han
originado un mercado potencialmente considerable de robots de compañía y ayuda.
La silla de ruedas robótica de la Universidad de Tokio utiliza sensores que permiten a los
usuarios controlar sus movimientos cambiando de lado su peso corporal, mientras el robot

móvil de “asistencia a humanos” de NSK –un perro guía de alta tecnología sobre ruedas–
guía a su propietario para salvar obstáculos.
Uno de los elementos más esperados de la exposición fue el nuevo traje de fuerza mejorado
de la Universidad de Ciencias de Tokio debido a que se empezará a producir para uso
comercial el próximo año. Este traje permite a la persona que lo viste realizar trabajos de
levantamientos agotadores y tiene unos usos muy evidentes entre ancianos y enfermos.
Otros robots de nueva generación demostraron unos niveles de destreza y delicadeza
inimaginables hace apenas unos años; suficientes, por ejemplo, para construir modelos de
Lego, sostener rodajas de bizcocho sin aplastarlas o transmitir imágenes de vídeo en vivo
mientras se deslizan entre los escombros causados por un terremoto (ver vídeo al final del
post).
Pero no todas las últimas creaciones son tan serias. El entretenimiento paralelo lo puso
Topio, un humanoide plateado que juega al tenis de mesa, mientras el diminuto Manoi Go –
que cuesta 1.000 libras– reafirmó su reputación como la próxima ciberestrella tras mostrar
sus habilidades como bailarín de breakdancing.
A continuación se presenta un cronograma de los avances de la robótica desde sus inicios.
FECHA DESARROLLO
Siglo
XVIII.
A mediados del J. de Vaucanson construyó varias muñecas mecánicas de
tamaño humano que ejecutaban piezas de música
1801 J. Jacquard invento su telar, que era una máquina programable para la
urdimbre
1805 H. Maillardet construyó una muñeca mecánica capaz de hacer dibujos.
1946 El inventor americano G.C Devol desarrolló un dispositivo controlador
que
podía registrar señales eléctricas por medio magnéticos y reproducirlas
para
Accionar una máquina mecánica. La patente estadounidense se emitió en
1952.
1951 Trabajo de desarrollo con tele operadores (manipuladores de control
remoto)
Para manejar materiales radiactivos. Patente de Estados Unidos emitidas
para Goertz (1954) y Bergsland (1958).
1952 Una máquina prototipo de control numérico fue objetivo de demostración
en el Instituto Tecnológico de Massachusetts después de varios años de
desarrollo.
Un lenguaje de programación de piezas denominado APT (Automatically)

Programad Tooling) se desarrolló posteriormente y se publicó en 1961.
1954 El inventor británico C. W. Kenward solicitó su patente para diseño de
robot.
Patente británica emitida en 1957.
1954 G.C. Devol desarrolla diseños para Transferencia de artículos
programada.
Patente emitida en Estados Unidos para el diseño en 1961.
1959 Se introdujo el primer robot comercial por Planet Corporación. Estaba
controlado por interruptores de fin de carrera.
1960 Se introdujo el primer robot ‘Unimate’’, basada en la transferencia de
artic.
Programada de Devol. Utilizan los principios de control numérico para el
Control de manipulador y era un robot de transmisión hidráulica.
1961 Un robot Unimate se instaló en la Ford Motors Company para atender
una
Máquina de fundición de troquel.
1966 Trallfa, una firma noruega, construyó e instaló un robot de pintura por
pulverización.
FECHA
DESARROLLO
1968 Un robot móvil llamado ‘Shakey’’ se desarrollo en SRI (Stamford
Research
Instituto), estaba provisto de una diversidad de sensores así como una
cámara de visión y sensores táctiles y podía desplazarse por el suelo.
1971 El ‘Stamford Arm’’, un pequeño brazo de robot de accionamiento
eléctrico, se desarrolló en la Stamford Universito.
1973 Se desarrolló en SRI el primer lenguaje de programación de robots del
tipo de computadora para la investigación con la denominación WAVE.
Fue
Seguido por el lenguaje AL en 1974. Los dos lenguajes se desarrollaron
Posteriormente en el lenguaje VAL comercial para Animación por Víctor
Scheinman y Bruce Simano.
1974 ASEA introdujo el robot Irb6 de accionamiento completamente eléctrico.
1974 Kawasaki, bajo licencia de Animación, instaló un robot para soldadura
por arco para estructuras de motocicletas.
1974 Cincinnati Milacron introdujo el robot T3 con control por computadora.
1975 El robot ‘Sigma’’ de Olivetti se utilizó en operaciones de montaje, una de

las
Primitivas aplicaciones de la robótica al montaje.
1976 Un dispositivo de Remopte Center Compliance (RCC) para la inserción
de
piezas en la línea de montaje se desarrolló en los laboratorios Charles
Stark
Draper Labs en estados Unidos.
1978 El robot T3 de Cincinnati Milacron se adaptó y programó para realizar
operaciones de taladro y circulación de materiales en componentes de
aviones, bajo el patrocinio de Air Forcé ICAM (Integrated Computer-
Aided Manufacturing).
1978 Se introdujo el robot PUMA (Programmable Universal Machine for
Assambly) para tareas de montaje por Unimation, basándose en diseños
obtenidos en un estudio de la General Motors.
1979 Desarrollo del robot tipo SCARA (Selective Compliance Arm for Robotic
Assambly) en la Universidad de Yamanashi en Japón para montaje.
Varios robots SCARA comerciales se introdujeron hacia 1981.
1980 Un sistema robótico de captación de recipientes fue objeto de
demostración en la Universidad de Rhode Island. Con el empleo de visión
de máquina
el sistema era capaz de captar piezas en orientaciones aleatorias y
posiciones
Fuera de un recipiente.
FECHA DESARROLLO
1981 Se desarrolló en la Universidad de Carnegie- Mellón un robot de
impulsión
Directa. Utilizaba motores eléctricos situados en las articulaciones del
manipula dar sin las transmisiones mecánicas habituales empleadas en la
mayoría de los robots.
1982 IBM introdujo el robot RS-1 para montaje, basado en varios años de
desgarro
Yo interno. Se trata de un robot de estructura de caja que utiliza un
brazo
Constituido por tres dispositivos de deslizamiento ortogonales. El
lenguaje del robot AML, desarrollado por IBM, se introdujo también
para programar
El robot SR-1.
1983 Informe emitido por la investigación en Westinghouse Corp. bajo el
patrocinio de Nacional Sáciense Fundación sobre un sistema de montaje

Tabletas de última generación
Samsung Galaxy Tab 2.0 es su tableta estelar para este año, que viene
con Android 4.0 (Icecream) y se podrá probar con más detalle durante
el Congreso Mundial de Móviles de Barcelona a finales de febrero. La tableta, en versión inalámbrica y 3G, tendrá una pantalla de siete
pulgadas, mantiene el procesador de doble núcleo a un gigahercio, la
cámara y la resolución de pantalla del anterior modelo. Tab 2.0 se
comercializará primero en Reino Unido en marzo y tendrá acceso, como el resto de tabletas de la compañía, al centro de contenidos del
fabricante surcoreano: Music Hub y sus 13 millones de canciones o
Reader Hub, con 2,3 millones de libros. De Game Hub no se ha
concretado la cantidad de juegos disponibles, ni tan siquiera de algún
título, solo que contará con las últimas novedades. El videoclub tendrá
una oferta inicial de 1.000 películas.
En esta misma línea Samsung España ha hecho público hoy un anuncio
con Youzee, un servicio parecido a Netflix, que permite ver series y
películas sin límite por 6,99 euros al mes. Este servicio pasará a estar
en sus televisores avanzados como aplicación. Y es que la empresa intenta ir un paso por delante de sus competidores con los televisores.
En primavera llegarán a España sus modelos de alta gama ES 8000 y ES
7000, que presumen de pantalla de 75 centímetros, doble núcleo (como
teléfonos y tabletas) y conexión a la Red. La gran novedad es una
cámara superior que sirve para, de manera muy parecida a lo que hace el sensor Kinect de la consola xBox de Microsoft, cambiar de canal, subir
el volumen o navegar por Internet sin mando a distancia, solo con la voz
y los gestos. No prescinde del mando a distancia pero podría hacerlo si
quisiera. La cámara servirá también para hacer videoconfencia y
multiconferencia.

Software Libre o Free Software
Es un software disponible para cualquiera que desee utilizarlo, copiarlo y distribuirlo, ya sea en su forma original o con modificaciones. La
posibilidad de modificaciones implica que el código fuente está disponible. Si un programa es libre, puede ser potencialmente incluido
en un sistema operativo también libre. Es importante no confundir
software libre con software gratis, porque la libertad asociada al
software libre de copiar, modificar y redistribuir, no significa gratuidad. Existen programas gratuitos que no pueden ser modificados ni
redistribuidos. Y existen programas pagos.
Copyleft
La mayoría de las licencias usadas en la publicación de software libre
permite que los programas sean modificados y redistribuidos. Estas prácticas están generalmente prohibidas por la legislación internacional
de copyright, que intenta impedir que alteraciones y copias sean
efectuadas sin la autorización del o los autores. Las licencias que
acompañan al software libre hacen uso de la legislación de copyright para impedir la utilización no autorizada, pero estas licencias definen
clara y explícitamente las condiciones bajo las cuales pueden realizarse
copias, modificaciones y redistribuciones, con el fin de garantizar las
libertades de modificar y redistribuir el software registrado. A esta
versión de copyright, se le da el nombre de copyleft.
GPL
La Licencia Pública General GNU (GNU General Public License GPL) es la
licencia que acompaña los paquetes distribuidos por el Proyecto GNU,

más una gran variedad de software que incluye el núcleo del sistema
operativo Linux. La formulación de GPL es tal que en vez de limitar la
distribución del software que protege, llega hasta impedir que este
software sea integrado en software propietario. La GPL se basa en la legislación internacional de copyright, lo que debe garantizar cobertura
legal para el software licenciado con GPL.







