INTELIGENCIA ARTIFICIAL APLICADA A LA ROBOTICA
Hernan David Rodriguez G.
David Rodolfo Sandoval P
William Steven Clavijo Valero

INTRODUCCION
• La historia de la robótica va unida a la construcción de "artefactos", que trataban de materializar el deseo humano de crear seres a su semejanza y que lo descargasen del trabajo
EVOLUCION DE LA ROBOTICA

PRIMERA GENERACION (manipuladores)
sistemas mecánicos multifuncionalescon un sencillo sistema de control,bien manual, de secuencia fija ovariable

SEGUNDA GENERACION (robots de aprendizaje)
• repiten una secuencia de movimientos que hasido ejecutada previamente por un operadorhumano. El modo de hacerlo es a través de undispositivo mecánico. El operador realiza losmovimientos requeridos mientras el robot le siguey los memoriza.

TERCERA GENERACION (control sensorizado)
• Robots con control sensorizado. Elcontrolador es una computadora que ejecutalas órdenes de un programa y las envía almanipulador para que realice losmovimientos necesarios. De esta manerautiliza las computadoras para su estrategiade control y tiene algún conocimiento delambiente local a través del uso de sensores,los cuales miden el ambiente y modifican suestrategia de control.

CUARTA GENERACION ( robots inteligentes)
• poseen sensores que envíaninformación a la computadora decontrol sobre el estado del proceso.Esto permite una toma inteligentede decisiones y el control delproceso en tiempo real

FUTURO DE LA ROBOTICA

Robótica situada
• Este enfoque se ocupa de los robotsque están insertos en entornoscomplejos y, a menudo,dinámicamente cambiantes. Se basasobre dos ideas centrales: los robots
Robótica basada en la conducta o el comportamiento
• Este acercamiento emplea elprincipio conductista: los robotsgeneran un comportamiento sólocuando se los estimula; es decir,reaccionan ante los cambios desu entorno local (como cuandoalguien toca accidentalmente unobjeto caliente).

Robótica cognitiva
• Esta aproximación utiliza técnicasprovenientes del campo de lasCiencias Cognitivas. Se ocupa deimplementar robots que perciben,razonan y actúan en entornosdinámicos, desconocidos eimprevisibles
Robótica de desarrollo o epigenetica
• Este enfoque se caracteriza porque tratade implementar sistemas de control depropósito general, a través de unprolongado proceso de desarrollo uauto‐organización autónoma. Comoresultado de la interacción con su entorno,el robot es capaz de desarrollar diferentes–y cada vez más complejas– capacidadesperceptuales, cognitivas y decomportamiento.
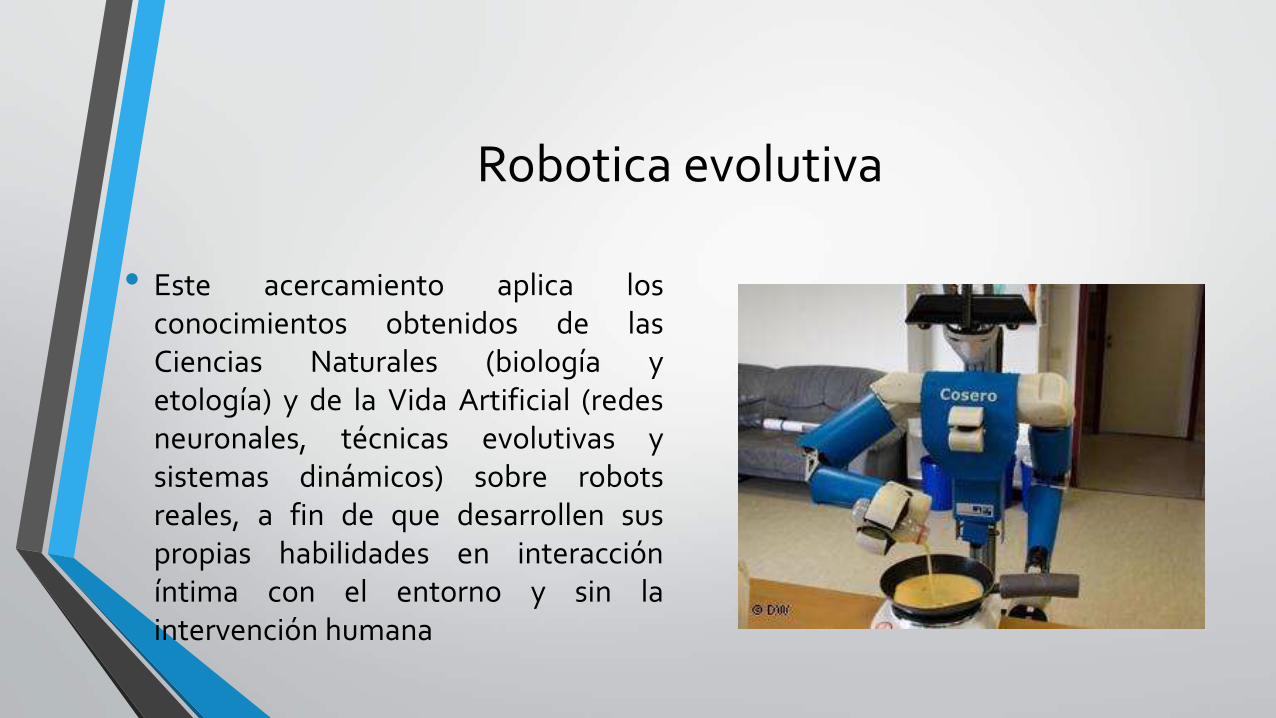
Robotica evolutiva
• Este acercamiento aplica losconocimientos obtenidos de lasCiencias Naturales (biología yetología) y de la Vida Artificial (redesneuronales, técnicas evolutivas ysistemas dinámicos) sobre robotsreales, a fin de que desarrollen suspropias habilidades en interaccióníntima con el entorno y sin laintervención humana

Robotica inspirada en la biologia
• Esta aproximación se ocupa de diseñar robots que funcionan como los sistemas biológicos, de allí que se basan sobre las Ciencias Naturales (biología, zoología y etología) y la robótica.

EJEMPLOS ACTUALES
Smiby DroneNao

BIBLIOGRAFIA
• http://es.wikipedia.org/wiki/Rob%C3%B3tica
• http://www.revistagq.com/actualidad/trending-topic/articulos/stephen-hawking-contra-terminator/21209
• http://es.wikipedia.org/wiki/Inteligencia_artificial
• http://www.it.uc3m.es/jvillena/irc/practicas/09-10/26mem.pdf
• http://www.eltiempo.com/estilo-de-vida/ciencia/robots-para-acompanar-ancianos-en-japon/15150847
• http://www.eltiempo.com/estilo-de-vida/ciencia/en-japon-utilizan-robots-para-atender-en-bancos/15095977








