dispositivo de simulación de la contracción isométrica ... · los elementos o componentes ... el...
TRANSCRIPT
1
Dispositivo de simulación de la contracción isométrica en
músculo esquelético para usos didácticos
F A Jure y S Belluzo
Laboratorio de Fisiología y Biofísica, Facultad de Ingeniería, Universidad Nacional de
Entre Ríos
E-mail: [email protected], [email protected]
Resumen. El uso de modelos físicos en la enseñanza resulta de utilidad en especial
para el aprendizaje de conceptos complejos que involucran contenidos disciplinares
diferentes. En este trabajo se presenta un modelo mecánico del músculo esquelético,
con fines didácticos de bajo costo, que permite simular la contracción del mismo
durante estimulación tetánica en condiciones isométricas. Basado en el modelo teórico
de Hill, se construyó, un dispositivo físico y macroscópico conformado por un
elemento contráctil, representado con un motor y un elemento elástico en serie,
representado con un resorte lineal y un elástico. El modelo diseñado admite evaluar la
fuerza para distintas longitudes iniciales y utiliza un dinamómetro para cuantificar
dicha fuerza. Permite representar la relación Fuerza-Longitud con una aproximación
acorde a las que se obtienen en la preparación experimental, demostrando una
adecuada performance para fines educativos, como complemento y a veces
suplemento del trabajo práctico que se realiza con material biológico, colaborando en
la comprensión de uno de los aspectos de la mecánica muscular.
1. Introducción
En la carrera de Bioingeniería la combinación de significados de diferentes disciplinas es un desafío
permanente para sus estudiantes, por ello el estudio de la misma se puede ver facilitado utilizando
modelos sencillos que intuitivamente permitan comprender conceptos. Un ejemplo de lo expuesto se
observa en el estudio de la función contráctil del músculo que requiere integrar conocimientos
diversos de física mecánica, biología y fisiología, entre otros.
La estructura del tejido muscular mediante sus componentes contráctiles y elásticos produce una
respuesta fisiológica que en conjunto genera fuerza y/o movimiento. Los elementos o componentes
contráctiles son generadores activos de fuerza, dado que consumen energía metabólica, mientras que
los elásticos producen fuerza de modo pasivo. También es posible reconocer funcionalmente
elementos viscosos y naturalmente elementos inerciales [1].
Los tendones y los tejidos conectivos, dentro y alrededor del vientre muscular, son estructuras
viscoelásticas que ayudan a determinar las características mecánicas de todo músculo durante la
contracción y la extensión pasiva [2].
XVIII Congreso Argentino de Bioingeniería SABI 2011 - VII Jornadas de Ingeniería Clínica Mar del Plata, 28 al 30 de septiembre de 2011

2
En el elemento contráctil, los llamados puentes cruzados constituyen el mecanismo de generación
de fuerza activa. La elasticidad natural de los materiales orgánicos, desde proteínas tales como la
elastina y la titina, hasta una estructura macroscópica como los tendones, permite considerar la
presencia de elementos elásticos en cualquier modelo de la contracción muscular. La viscosidad surge
del movimiento de las estructuras musculares en matrices de líquidos extra e intracelular. La presencia
de masa en esos componentes da origen a los elementos inerciales [1].
Los elementos anteriormente mencionados van a interactuar entre ellos dando como resultado una
actividad muscular, que se traduce en un acortamiento y en una generación de tensión. A su vez, esas
manifestaciones de la contracción, pueden combinarse de diversas maneras dando origen a distintos
tipos de contracciones. La contracción del músculo esquelético puede ser estudiada in vitro bajo
distintas configuraciones y montajes. Las condiciones externas impuestas a la preparación
experimental, permiten variar algunos parámetros y mantener constante otros (peso, longitud, etc.).
Así se describen contracciones de tipo:
isométrica: en la cual el músculo se contrae pero no modifica su longitud.
isotónica: en la cual el músculo se contrae y acorta contra una carga fija, es decir mantiene la
fuerza constante durante toda la contracción y cambia la longitud.
auxotónica: en la cual durante la contracción muscular varían la longitud y la fuerza
isotónica a postcarga: en este tipo de montaje se identifican primero una contracción a longitud
constante (fase isométrica) y, luego, un acortamiento a fuerza constante (fase isotónica)
En este trabajo se modelará la contracción isométrica. En la figura 1, se representa el esquema que
permite su estudio, a la izquierda se puede observar un músculo (m) colocado en posición horizontal,
con ambos extremos representando la inserción ósea como punto de fijación ó soportes fijos. Cuando
en ese montaje el músculo es estimulado a frecuencia tetánica, se contrae sin poder acortarse (no
cambia su longitud) pero cambia la tensión que realiza.
A la derecha de la figura 1, se muestra la relación entre la longitud del músculo y la tensión
desarrollada. Al estimular el músculo cuando presenta una longitud lA y una tensión A, se observa que
la tensión se incrementa hasta el valor B y la longitud no se modifica (desplazamiento del punto A
hacia el punto B). De manera que es posible obtener el valor de la tensión máxima (curva b) que
genera el músculo para distintas longitudes iniciales (curva a), es decir: longitudes previas a la
estimulación. La curva a representa la tensión elástica del músculo o tensión pasiva (TP) y la curva b
representa la tensión total (TT) [3].
Figura 1. Esquema de la preparación experimental para la contracción isométrica y gráfica
correspondiente, (ver detalles en el texto). A la izquierda se ilustra un músculo (m), sujeto en ambos
extremos (puntos de fijación), con una cierta longitud (l). A la derecha se muestra la relación tensión-
longitud, en la preparación isométrica, donde “b” representa la curva de tensión total y “a” representa
la curva de tensión pasiva. Cuando el músculo es estimulado en la condición representada en el A (lA
, A) esta condición cambia a B (l1 , 1). Imagen modificada de Biofísica, Frumento, A. [3]
XVIII Congreso Argentino de Bioingeniería SABI 2011 - VII Jornadas de Ingeniería Clínica Mar del Plata, 28 al 30 de septiembre de 2011
3
Diversos modelos macro y microscópicos, han sido propuestos para tratar de explicar el
comportamiento de la contracción muscular que se observa en el laboratorio. Dos de ellos se ilustran
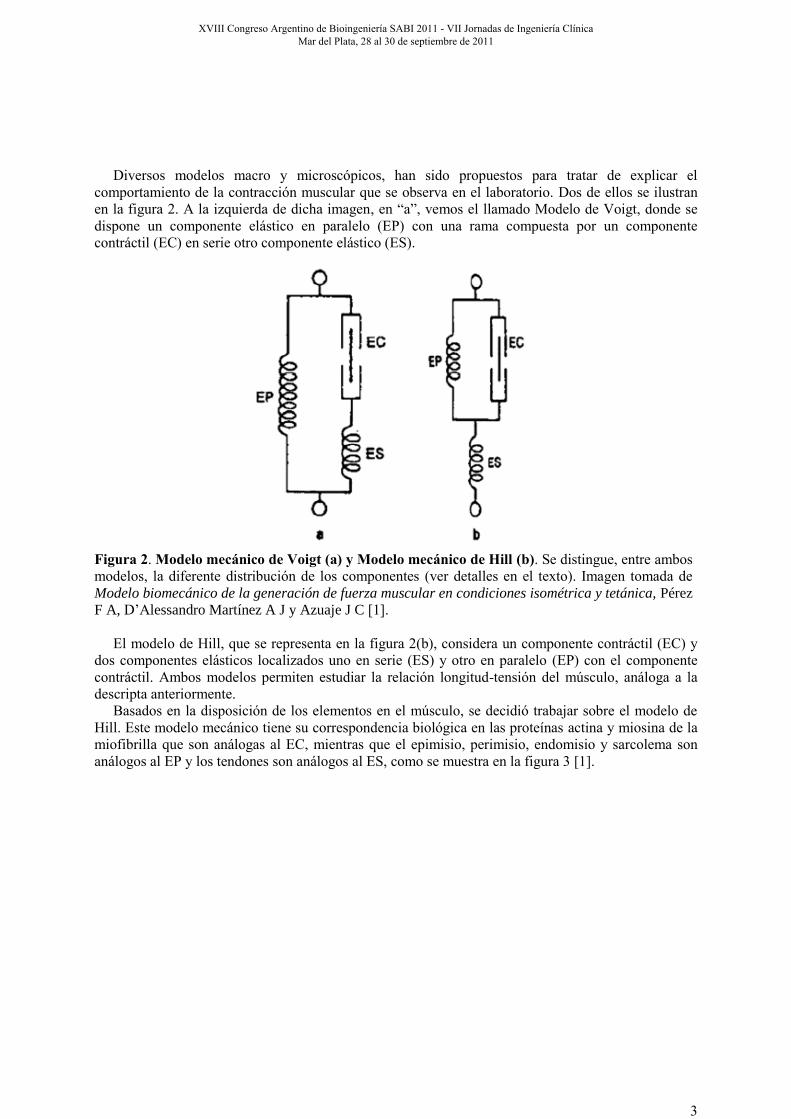
en la figura 2. A la izquierda de dicha imagen, en “a”, vemos el llamado Modelo de Voigt, donde se
dispone un componente elástico en paralelo (EP) con una rama compuesta por un componente
contráctil (EC) en serie otro componente elástico (ES).
Figura 2. Modelo mecánico de Voigt (a) y Modelo mecánico de Hill (b). Se distingue, entre ambos
modelos, la diferente distribución de los componentes (ver detalles en el texto). Imagen tomada de
Modelo biomecánico de la generación de fuerza muscular en condiciones isométrica y tetánica, Pérez
F A, D’Alessandro Martínez A J y Azuaje J C [1].
El modelo de Hill, que se representa en la figura 2(b), considera un componente contráctil (EC) y
dos componentes elásticos localizados uno en serie (ES) y otro en paralelo (EP) con el componente
contráctil. Ambos modelos permiten estudiar la relación longitud-tensión del músculo, análoga a la
descripta anteriormente.
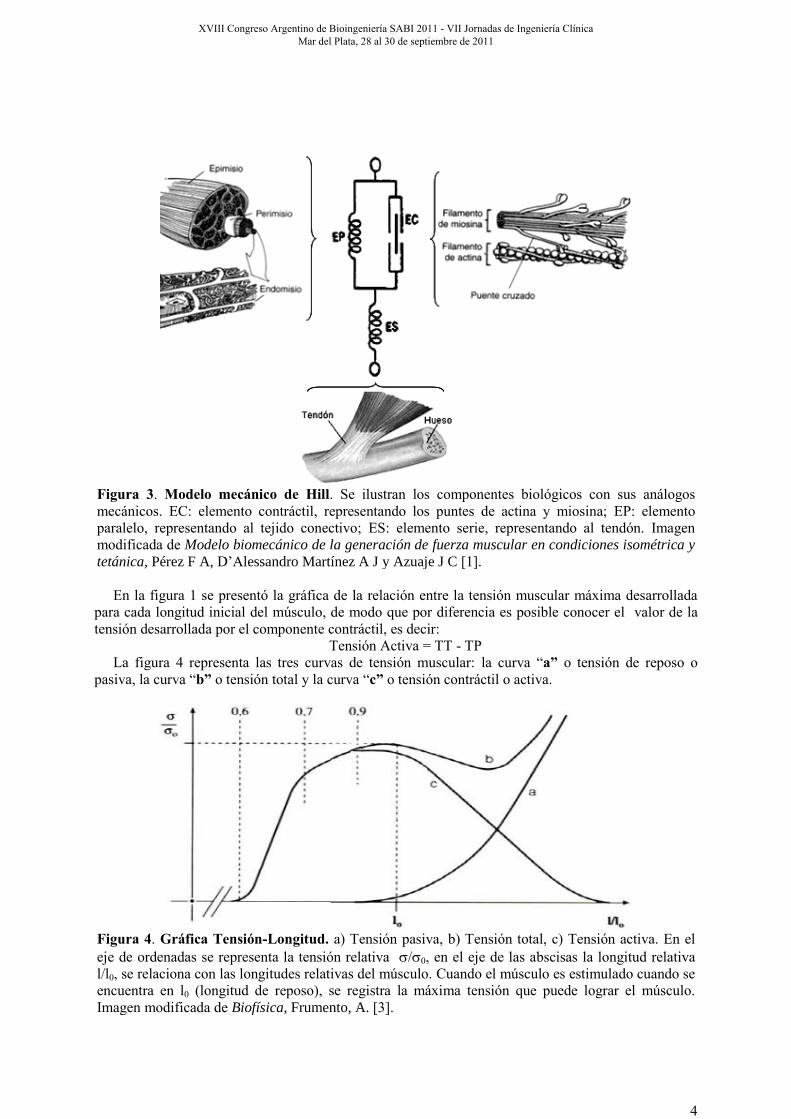
Basados en la disposición de los elementos en el músculo, se decidió trabajar sobre el modelo de
Hill. Este modelo mecánico tiene su correspondencia biológica en las proteínas actina y miosina de la
miofibrilla que son análogas al EC, mientras que el epimisio, perimisio, endomisio y sarcolema son
análogos al EP y los tendones son análogos al ES, como se muestra en la figura 3 [1].
XVIII Congreso Argentino de Bioingeniería SABI 2011 - VII Jornadas de Ingeniería Clínica Mar del Plata, 28 al 30 de septiembre de 2011
4
Figura 3. Modelo mecánico de Hill. Se ilustran los componentes biológicos con sus análogos
mecánicos. EC: elemento contráctil, representando los puntes de actina y miosina; EP: elemento
paralelo, representando al tejido conectivo; ES: elemento serie, representando al tendón. Imagen
modificada de Modelo biomecánico de la generación de fuerza muscular en condiciones isométrica y
tetánica, Pérez F A, D’Alessandro Martínez A J y Azuaje J C [1].
En la figura 1 se presentó la gráfica de la relación entre la tensión muscular máxima desarrollada
para cada longitud inicial del músculo, de modo que por diferencia es posible conocer el valor de la
tensión desarrollada por el componente contráctil, es decir:
Tensión Activa = TT - TP
La figura 4 representa las tres curvas de tensión muscular: la curva “a” o tensión de reposo o
pasiva, la curva “b” o tensión total y la curva “c” o tensión contráctil o activa.
Figura 4. Gráfica Tensión-Longitud. a) Tensión pasiva, b) Tensión total, c) Tensión activa. En el
eje de ordenadas se representa la tensión relativa /0, en el eje de las abscisas la longitud relativa
l/l0, se relaciona con las longitudes relativas del músculo. Cuando el músculo es estimulado cuando se
encuentra en l0 (longitud de reposo), se registra la máxima tensión que puede lograr el músculo.
Imagen modificada de Biofísica, Frumento, A. [3].
XVIII Congreso Argentino de Bioingeniería SABI 2011 - VII Jornadas de Ingeniería Clínica Mar del Plata, 28 al 30 de septiembre de 2011
5
En este trabajo, basado en el modelo de Hill, se presenta la construcción de un dispositivo que
permite estudiar la tensión isométrica del músculo, es decir sin variar su longitud, cuando es
estimulado para generar fuerza máxima.
El desarrollo fue llevado a cabo por estudiantes del 3er. año de la carrera de Bioingeniería con la
dirección de un docente de la Cátedra de Fisiología y Biofísica, de la Universidad Nacional de Entre
Ríos.
2. Materiales y Métodos
El diseño del dispositivo se basó en el modelo de Hill que permite recrear y estudiar la contracción
isométrica (entre otras) del músculo esquelético.
Los materiales utilizados en su fabricación fueron elementos de bajo costo y de fácil acceso en el
mercado. Entre ellos mencionamos: arandelas, cables monofilamentos del tipo telofónico, elásticos
textiles, madera de pino, plaquetas circuitales, pulsadores, resistencias de distintos valores (220 [Ω],
180[Ω], 150[Ω], 120[Ω],100[Ω],82[Ω], 68[Ω], 60[Ω], 50[Ω], 47[Ω], 39[Ω], 33[Ω], 27[Ω], 22[Ω]),
resortes de tracción, tornillos, un dinamómetro graduado con rango de 0 [Kg] a 4 [Kg] y una
resolución de 0.1[Kg] , un LED rojo de 1.3 [V], un motor de corriente continua de 24[V], un tornillo
sin fin con diámetro de 0.5[cm] y un largo de 80 [cm], una fuente de tensión (220[V] ~ 0.3[A]
50/60[Hz], 5[V] – 0.4[A]) , un tensor y una perilla de tres estados. Las herramientas empleadas en la
construcción fueron las de uso cotidiano como son destornillador, sierra, soldador, pinzas, alicates,
taladro.
3. Resultados y Discusión
3.1 Diseño y construcción del dispositivo
Dado que se trata de un trabajo fundamentalmente de desarrollo, a continuación se describe el proceso
seguido durante el cual se fueron ensayando diseño y estrategias de construcción, como así también
los diferentes materiales que permitieron arribar al dispositivo que se finalmente se propone.
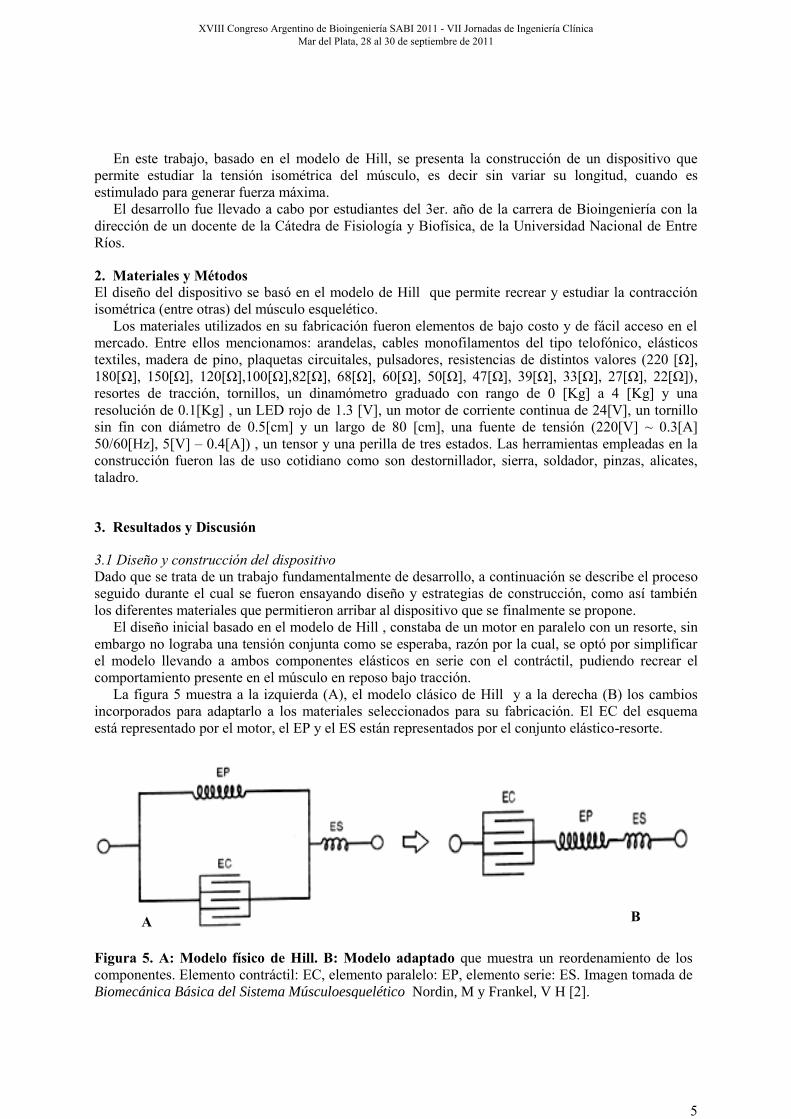
El diseño inicial basado en el modelo de Hill , constaba de un motor en paralelo con un resorte, sin
embargo no lograba una tensión conjunta como se esperaba, razón por la cual, se optó por simplificar
el modelo llevando a ambos componentes elásticos en serie con el contráctil, pudiendo recrear el
comportamiento presente en el músculo en reposo bajo tracción.
La figura 5 muestra a la izquierda (A), el modelo clásico de Hill y a la derecha (B) los cambios
incorporados para adaptarlo a los materiales seleccionados para su fabricación. El EC del esquema
está representado por el motor, el EP y el ES están representados por el conjunto elástico-resorte.
Figura 5. A: Modelo físico de Hill. B: Modelo adaptado que muestra un reordenamiento de los
componentes. Elemento contráctil: EC, elemento paralelo: EP, elemento serie: ES. Imagen tomada de
Biomecánica Básica del Sistema Músculoesquelético Nordin, M y Frankel, V H [2].
A B
XVIII Congreso Argentino de Bioingeniería SABI 2011 - VII Jornadas de Ingeniería Clínica Mar del Plata, 28 al 30 de septiembre de 2011
6
Los elementos fueron montados sobre una plataforma de madera de 70x10x3 [cm3], para poder
estirar al elástico y al resorte.
La estimulación tetánica se obtuvo con un motor de 24 [V], de corriente continua con reducción
por engranajes, montado en un carro de madera sobre un riel guía del mismo material, que permite
variar su posición gracias a un sistema de tornillo sin fin. Este cambio de posición del motor simula las
distintas elongaciones y de este modo permite obtener los correspondientes valores de tensión.
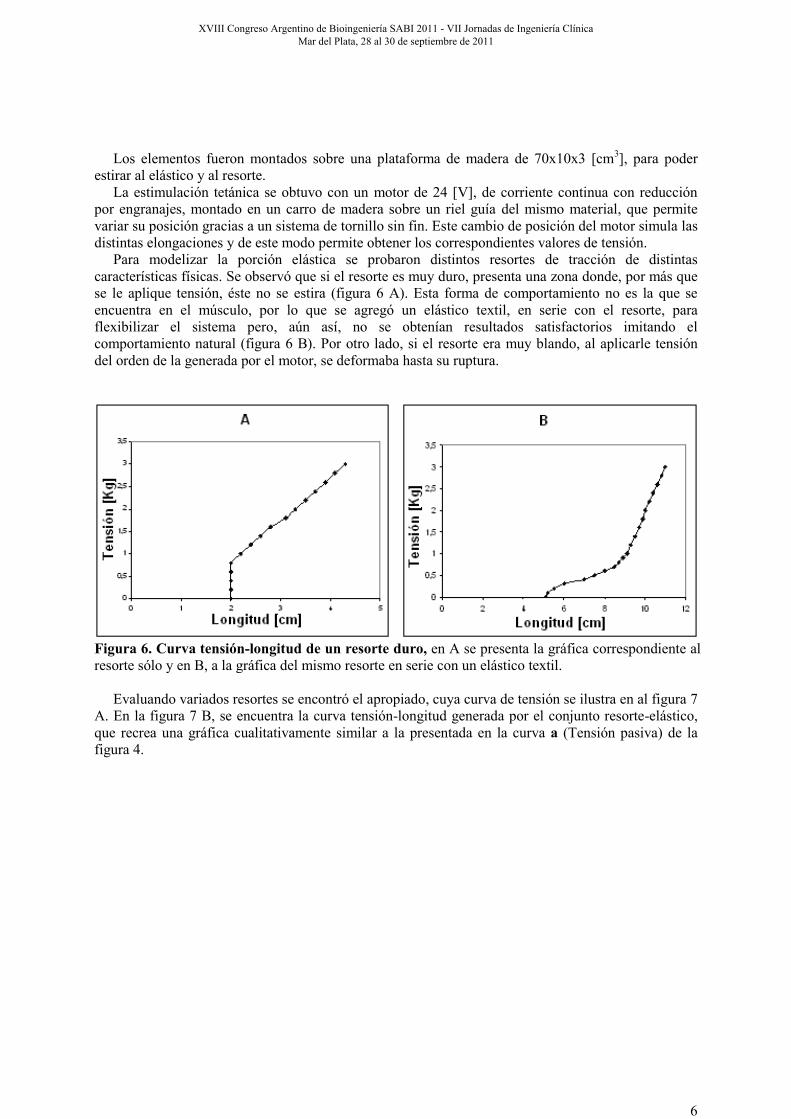
Para modelizar la porción elástica se probaron distintos resortes de tracción de distintas
características físicas. Se observó que si el resorte es muy duro, presenta una zona donde, por más que
se le aplique tensión, éste no se estira (figura 6 A). Esta forma de comportamiento no es la que se
encuentra en el músculo, por lo que se agregó un elástico textil, en serie con el resorte, para
flexibilizar el sistema pero, aún así, no se obtenían resultados satisfactorios imitando el
comportamiento natural (figura 6 B). Por otro lado, si el resorte era muy blando, al aplicarle tensión
del orden de la generada por el motor, se deformaba hasta su ruptura.
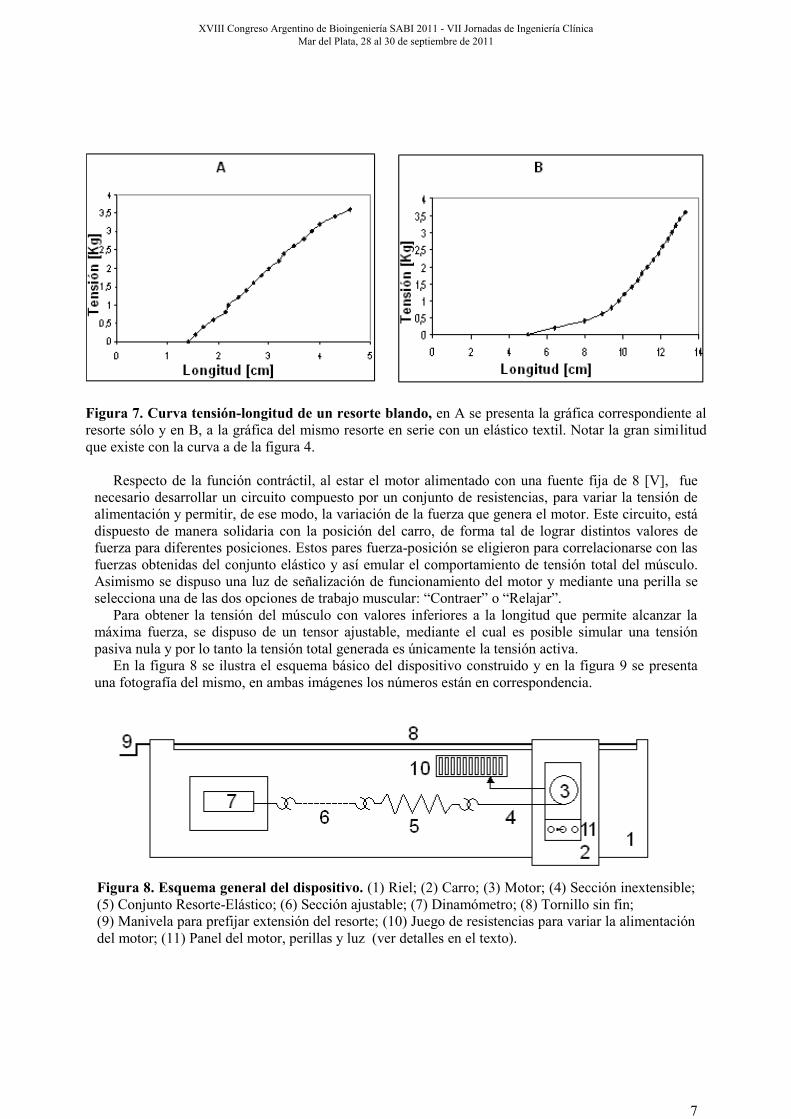
Evaluando variados resortes se encontró el apropiado, cuya curva de tensión se ilustra en al figura 7
A. En la figura 7 B, se encuentra la curva tensión-longitud generada por el conjunto resorte-elástico,
que recrea una gráfica cualitativamente similar a la presentada en la curva a (Tensión pasiva) de la
figura 4.
Figura 6. Curva tensión-longitud de un resorte duro, en A se presenta la gráfica correspondiente al
resorte sólo y en B, a la gráfica del mismo resorte en serie con un elástico textil.
XVIII Congreso Argentino de Bioingeniería SABI 2011 - VII Jornadas de Ingeniería Clínica Mar del Plata, 28 al 30 de septiembre de 2011
7
Figura 7. Curva tensión-longitud de un resorte blando, en A se presenta la gráfica correspondiente al
resorte sólo y en B, a la gráfica del mismo resorte en serie con un elástico textil. Notar la gran similitud
que existe con la curva a de la figura 4.
Respecto de la función contráctil, al estar el motor alimentado con una fuente fija de 8 [V], fue
necesario desarrollar un circuito compuesto por un conjunto de resistencias, para variar la tensión de
alimentación y permitir, de ese modo, la variación de la fuerza que genera el motor. Este circuito, está
dispuesto de manera solidaria con la posición del carro, de forma tal de lograr distintos valores de
fuerza para diferentes posiciones. Estos pares fuerza-posición se eligieron para correlacionarse con las
fuerzas obtenidas del conjunto elástico y así emular el comportamiento de tensión total del músculo.
Asimismo se dispuso una luz de señalización de funcionamiento del motor y mediante una perilla se
selecciona una de las dos opciones de trabajo muscular: “Contraer” o “Relajar”.
Para obtener la tensión del músculo con valores inferiores a la longitud que permite alcanzar la
máxima fuerza, se dispuso de un tensor ajustable, mediante el cual es posible simular una tensión
pasiva nula y por lo tanto la tensión total generada es únicamente la tensión activa.
En la figura 8 se ilustra el esquema básico del dispositivo construido y en la figura 9 se presenta
una fotografía del mismo, en ambas imágenes los números están en correspondencia.
Figura 8. Esquema general del dispositivo. (1) Riel; (2) Carro; (3) Motor; (4) Sección inextensible;
(5) Conjunto Resorte-Elástico; (6) Sección ajustable; (7) Dinamómetro; (8) Tornillo sin fin;
(9) Manivela para prefijar extensión del resorte; (10) Juego de resistencias para variar la alimentación
del motor; (11) Panel del motor, perillas y luz (ver detalles en el texto).
XVIII Congreso Argentino de Bioingeniería SABI 2011 - VII Jornadas de Ingeniería Clínica Mar del Plata, 28 al 30 de septiembre de 2011
8
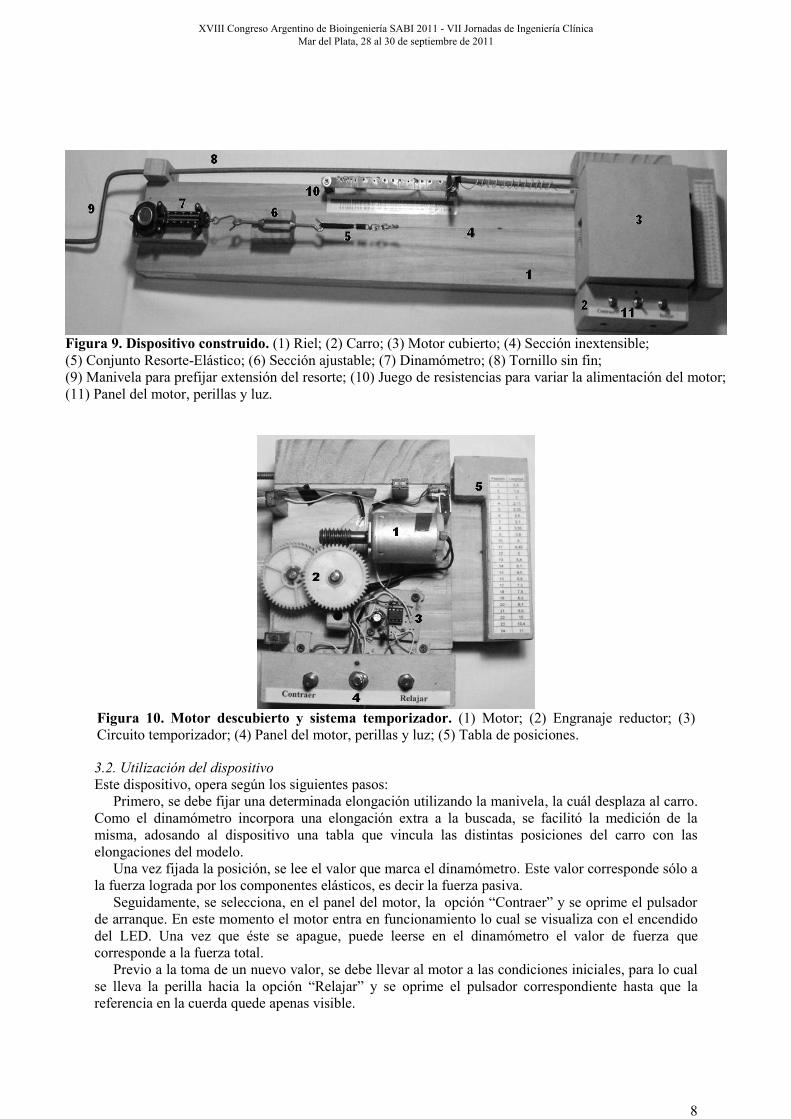
Figura 9. Dispositivo construido. (1) Riel; (2) Carro; (3) Motor cubierto; (4) Sección inextensible;
(5) Conjunto Resorte-Elástico; (6) Sección ajustable; (7) Dinamómetro; (8) Tornillo sin fin;
(9) Manivela para prefijar extensión del resorte; (10) Juego de resistencias para variar la alimentación del motor;
(11) Panel del motor, perillas y luz.
Figura 10. Motor descubierto y sistema temporizador. (1) Motor; (2) Engranaje reductor; (3)
Circuito temporizador; (4) Panel del motor, perillas y luz; (5) Tabla de posiciones.
3.2. Utilización del dispositivo
Este dispositivo, opera según los siguientes pasos:
Primero, se debe fijar una determinada elongación utilizando la manivela, la cuál desplaza al carro.
Como el dinamómetro incorpora una elongación extra a la buscada, se facilitó la medición de la
misma, adosando al dispositivo una tabla que vincula las distintas posiciones del carro con las
elongaciones del modelo.
Una vez fijada la posición, se lee el valor que marca el dinamómetro. Este valor corresponde sólo a
la fuerza lograda por los componentes elásticos, es decir la fuerza pasiva.
Seguidamente, se selecciona, en el panel del motor, la opción “Contraer” y se oprime el pulsador
de arranque. En este momento el motor entra en funcionamiento lo cual se visualiza con el encendido
del LED. Una vez que éste se apague, puede leerse en el dinamómetro el valor de fuerza que
corresponde a la fuerza total.
Previo a la toma de un nuevo valor, se debe llevar al motor a las condiciones iniciales, para lo cual
se lleva la perilla hacia la opción “Relajar” y se oprime el pulsador correspondiente hasta que la
referencia en la cuerda quede apenas visible.
XVIII Congreso Argentino de Bioingeniería SABI 2011 - VII Jornadas de Ingeniería Clínica Mar del Plata, 28 al 30 de septiembre de 2011
9
Para la medición de varios puntos se repiten los pasos anteriores.
Hay que tener en cuenta que para valores inferiores a la longitud inicial, se debe regular el tensor,
de forma de mantener tensado al sistema, sin modificar la fuerza generada por la porción elástica. A
partir de la longitud inicial, se mantiene al tensor en su máxima apertura, y se realizan las mediciones
como se indicó.
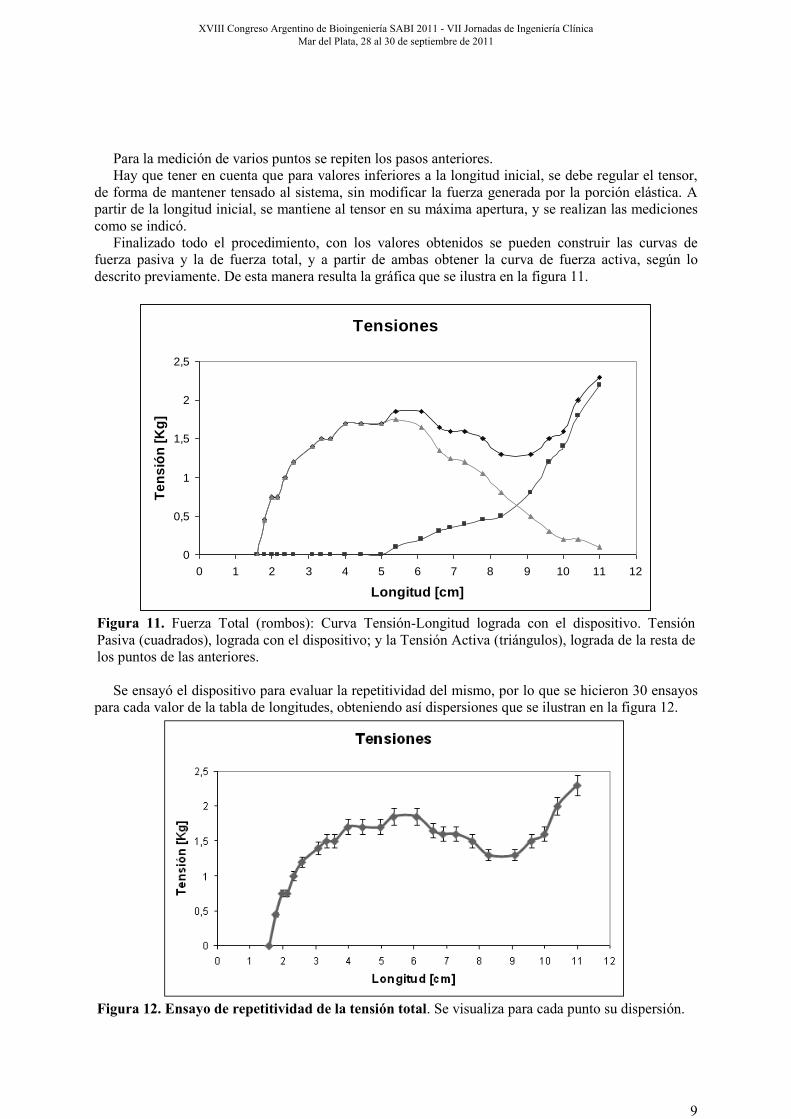
Finalizado todo el procedimiento, con los valores obtenidos se pueden construir las curvas de
fuerza pasiva y la de fuerza total, y a partir de ambas obtener la curva de fuerza activa, según lo
descrito previamente. De esta manera resulta la gráfica que se ilustra en la figura 11.
Tensiones
0
0,5
1
1,5
2
2,5
0 1 2 3 4 5 6 7 8 9 10 11 12
Longitud [cm]
Te
ns
ión
[K
g]
Figura 11. Fuerza Total (rombos): Curva Tensión-Longitud lograda con el dispositivo. Tensión
Pasiva (cuadrados), lograda con el dispositivo; y la Tensión Activa (triángulos), lograda de la resta de
los puntos de las anteriores.
Se ensayó el dispositivo para evaluar la repetitividad del mismo, por lo que se hicieron 30 ensayos
para cada valor de la tabla de longitudes, obteniendo así dispersiones que se ilustran en la figura 12.
Figura 12. Ensayo de repetitividad de la tensión total. Se visualiza para cada punto su dispersión.
XVIII Congreso Argentino de Bioingeniería SABI 2011 - VII Jornadas de Ingeniería Clínica Mar del Plata, 28 al 30 de septiembre de 2011
10
3.3. Conclusiones
Se logró construir un dispositivo con materiales de muy bajo costo, de fácil implementación y
montaje, lo cual resulta muy reproducible en diferentes ámbitos educativos, sin requerir la
disponibilidad de grandes recursos económicos. No se ha encontrado en la bibliografía revisada
referencias de construcciones de características semejantes a la presentada en este trabajo.
Se ha ensayado el uso de este dispositivo en clases prácticas de Fisiología y Biofísica, ofreciendo
a los alumnos una guía de la secuencia operatoria, y a partir de la experiencia representar la misma
gráficamente. Los resultados obtenidos muestran un perfil cualitativo de razonable similitud con las
gráficas que se obtienen en las prácticas sobre un músculo in vitro como las presentadas en la figura
4.
De esta forma, se brinda a los estudiantes una herramienta didáctica para facilitar la aproximación
al tema en caso de no contar con material biológico necesario para llevar a cabo la experiencia y, en
caso de contar con éste, poder contrastar con las dificultades y resultados obtenidos sobre el material
biológico, las ventajas y también las limitaciones de los modelos.
En una etapa posterior está previsto ampliar las prestaciones del diseño hacia las otras formas de
contracciones del músculo esquelético.
En síntesis esta estrategia didáctica, se entiende que favorece la comprensión y la interrelación
anátomo-funcional del músculo esquelético y la aplicación de conceptos de física mecánica a procesos
biológicos y además ofrece la posibilidad de discutir los alcances, relaciones y/o restricciones del uso
de modelos en biología, contrastándolos con experiencias in vitro.
4. Referencias
[1] Pérez F A, D’Alessandro Martínez A J y Azuaje J C (2008) Modelo biomecánico de la
generación de fuerza muscular en condiciones isométrica y tetánica [en línea], Archivos
Venezolanos de Farmacología y Terapéutica, vol. 27 nro. 1 [consultado: 23 de enero de 2009].
Disponible en: <http://www.scielo.org.ve>.
[2] Nordin, M y Frankel, V H (2001) Biomecánica Básica del Sistema Músculoesquelético Editorial
McGraw-Hill - Maxwell/Interamericana, Madrid, España.
[3] Frumento, A. (1995) Biofísica Tercera Edición, Editorial Mosby – Doyma, Madrid, España.
XVIII Congreso Argentino de Bioingeniería SABI 2011 - VII Jornadas de Ingeniería Clínica Mar del Plata, 28 al 30 de septiembre de 2011