diagramas de estado - d e a - departamento de …dea.unsj.edu.ar/control2/clase07_c-ee-diagramas de...
TRANSCRIPT

DIAGRAMAS DE ESTADO
Fernando di Sciascio (2016)

Diagramas de Estado
Los Diagramas de Estado son una extensión de losdiagramas de flujo señal y permiten describirgráficamente ecuaciones diferenciales y de estado. Eldiagrama de estado tiene una relación muy cercana conlas ecuaciones de estado, las funciones de transferenciay las simulaciones mediante computadora. Se construyensiguiendo todas las reglas de los gráficas de flujo señal,utilizando la transformada de Laplace de las ecuacionesde estado o en el dominio del tiempo medianteoperadores integrales.

Diagramas de Estado
Vamos a construir el Diagrama de Estado de un ejemplo apartir de las Ecuaciones de Estado. Esta herramienta nosayuda a visualizar las Variables de Estado.
Posteriormente el Diagrama de Estado nos permitirá obtenerrepresentaciones alternativas de los sistemas en espacio deestado, por ejemplo, las distintas formas canónicas.
Consideremos las siguientes ecuaciones de estado y de salida.

Diagramas de Estado a partir de las Ecuaciones de Estado
(a) Dibujar los nodos de derecha a izquierda
1) Se identifican los nodos de las variables de estado x1, x2, x3,
…; también se identifican los nodos a la izquierda de lasvariables de estado que serán las derivadas de las variables deestado (Figura a). También se identifican los nodos de entradar y de salida y.

Diagramas de Estado a partir de las Ecuaciones de Estado
2) Se conectan las variables de estado con sus derivadasmediante 1/s (o el operador integral 1/p) como se muestra en
la Figura (b).
(b) Interconectar las variables de estado y las derivadas

3) Utilizando las ecuaciones de estado, se introducen en cada nodolas señales indicadas. Por ejemplo, al nodo de sX1=>dx1/dt debe llegar2x1 - 5x2 + 3x3+ 2r, Figura (c).
(c) Formar dx1/dt
(d) Formar dx2/dt
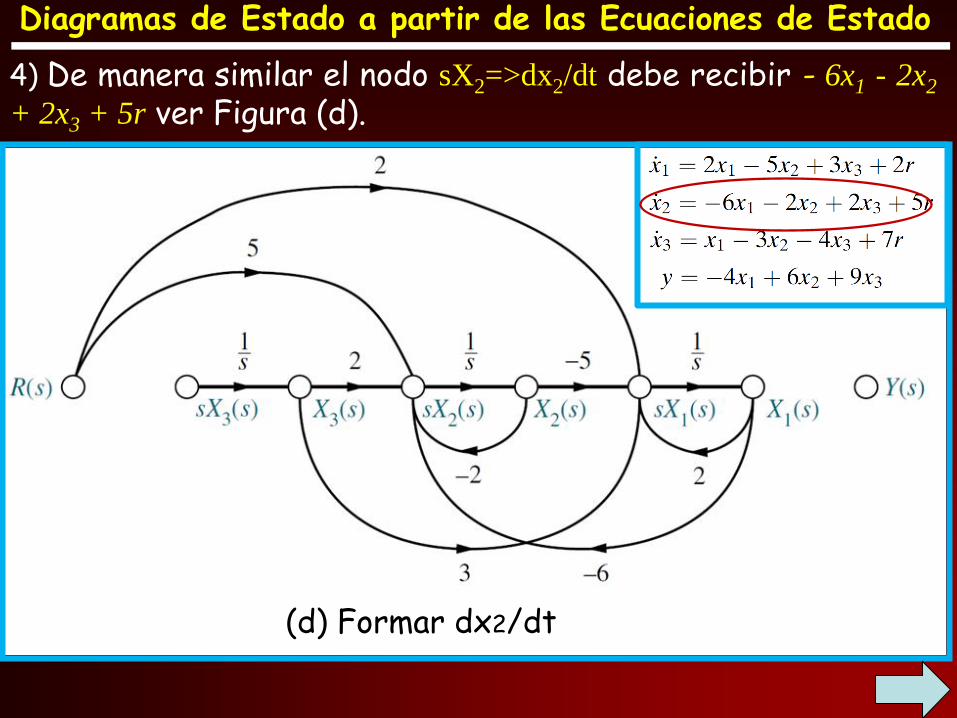
4) De manera similar el nodo sX2=>dx2/dt debe recibir - 6x1 - 2x2
+ 2x3 + 5r ver Figura (d).
Diagramas de Estado a partir de las Ecuaciones de Estado

5) De manera similar al nodo sX3=>dx3/dt debe llegar x1 - 3x2 -
4x3 + 7r ver Figura (e).
(e) Formar dx3/dt
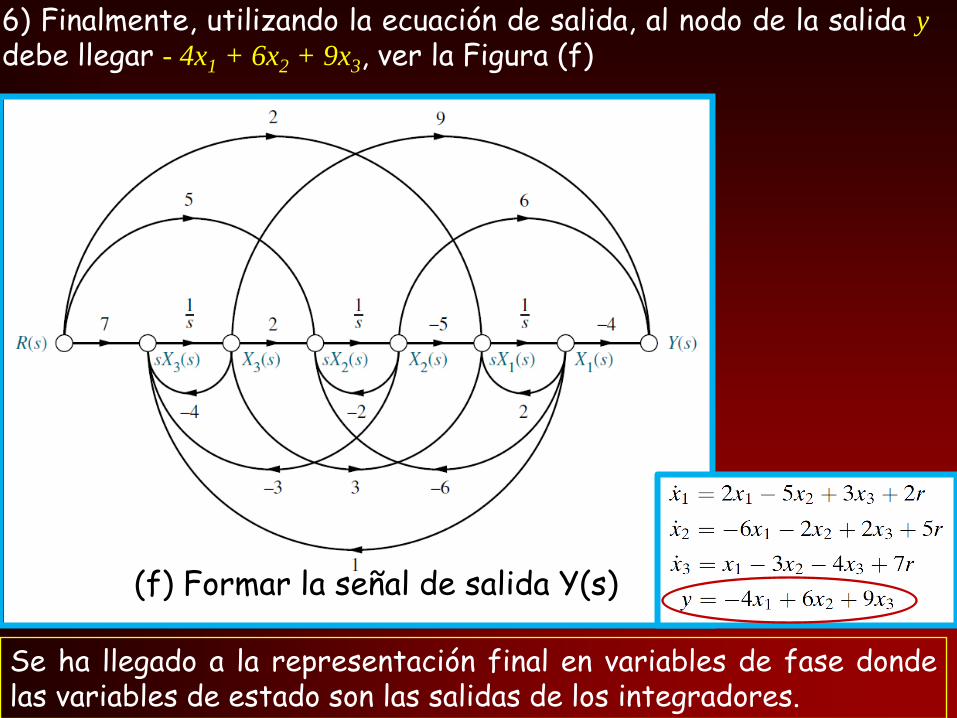
6) Finalmente, utilizando la ecuación de salida, al nodo de la salida y
debe llegar - 4x1 + 6x2 + 9x3, ver la Figura (f)
Se ha llegado a la representación final en variables de fase dondelas variables de estado son las salidas de los integradores.
(f) Formar la señal de salida Y(s)

Diagramas de Estado
Ahora utilizaremos los Diagramas de Estado paradesarrollar formas alternativas de los modelos deVariables de Estado a partir de la función detransferencia. Esto se conoce como DESCOMPOSICIÓN
DE LAS FUNCIONES DE TRANSFERENCIA.
Como ejemplo veremos dos descomposiciones:
● Descomposición en serie o cascada.
● Descomposición en paralelo.

Descomposición de una Función de Transferencia en Serie
Consideremos la siguiente función de transferencia paraejemplificar el método.
Se descompone la función de transferencia en bloques en serie defunciones de transferencia simples como se muestra en la figura(de primer orden para polos reales distintos, de orden r para polosreales repetidos r veces y de segundo orden para polos complejosconjugados).

Descomposición de una Función de Transferencia en Serie
En este ejemplo, cada bloque simple de primer orden tiene lasiguiente función de transferencia.

Descomposición de una Función de Transferencia en Serie
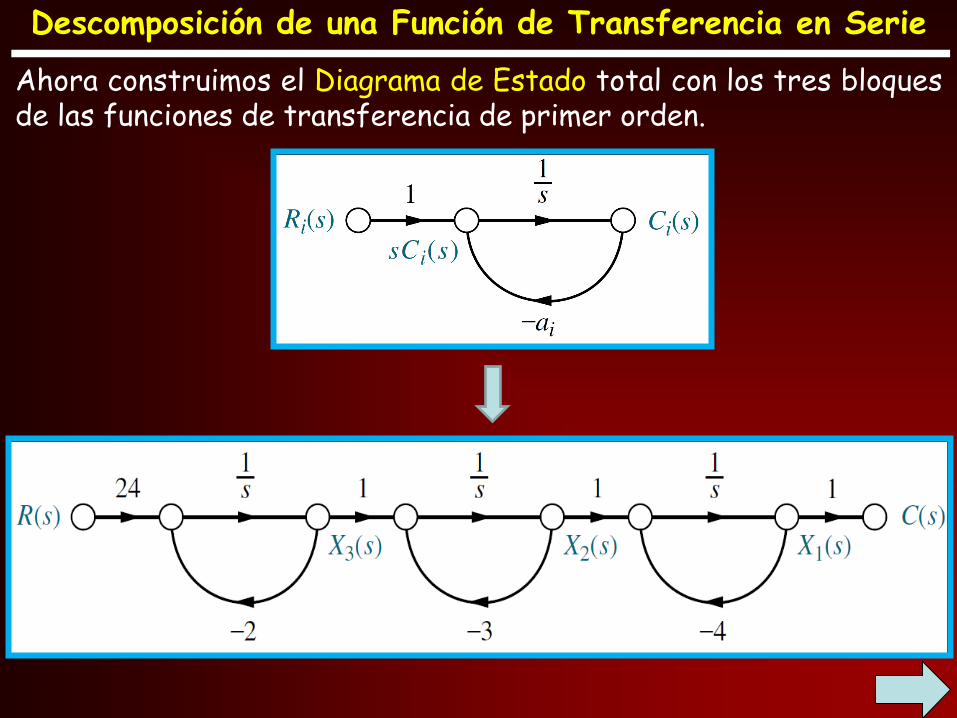
Ahora construimos el Diagrama de Estado de cada ecuacióndiferencial representativa de los bloque de funciones detransferencia de primer orden.
Descomposición de una Función de Transferencia en Serie
Ahora construimos el Diagrama de Estado total con los tres bloquesde las funciones de transferencia de primer orden.

Descomposición de una Función de Transferencia en Serie
Ahora a partir del Diagrama de Estado escribimos las ecuaciones deestado y de salida.

Descomposición de una Función de Transferencia en Serie
Finalmente, rescribimos las ecuaciones escalares en formamatricial.
La descomposición de la función de transferencia en serie nos ha llevado a la forma canónica triangular de Jordan.
Descomposición de una Función de Transferencia en Paralelo
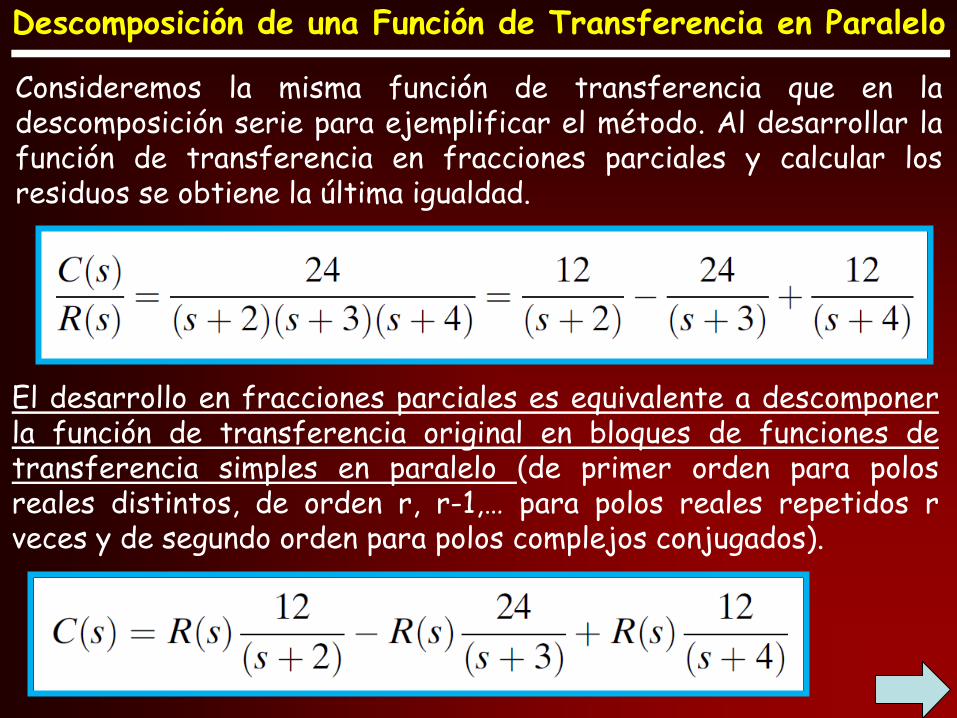
Consideremos la misma función de transferencia que en ladescomposición serie para ejemplificar el método. Al desarrollar lafunción de transferencia en fracciones parciales y calcular losresiduos se obtiene la última igualdad.
El desarrollo en fracciones parciales es equivalente a descomponerla función de transferencia original en bloques de funciones detransferencia simples en paralelo (de primer orden para polosreales distintos, de orden r, r-1,… para polos reales repetidos rveces y de segundo orden para polos complejos conjugados).
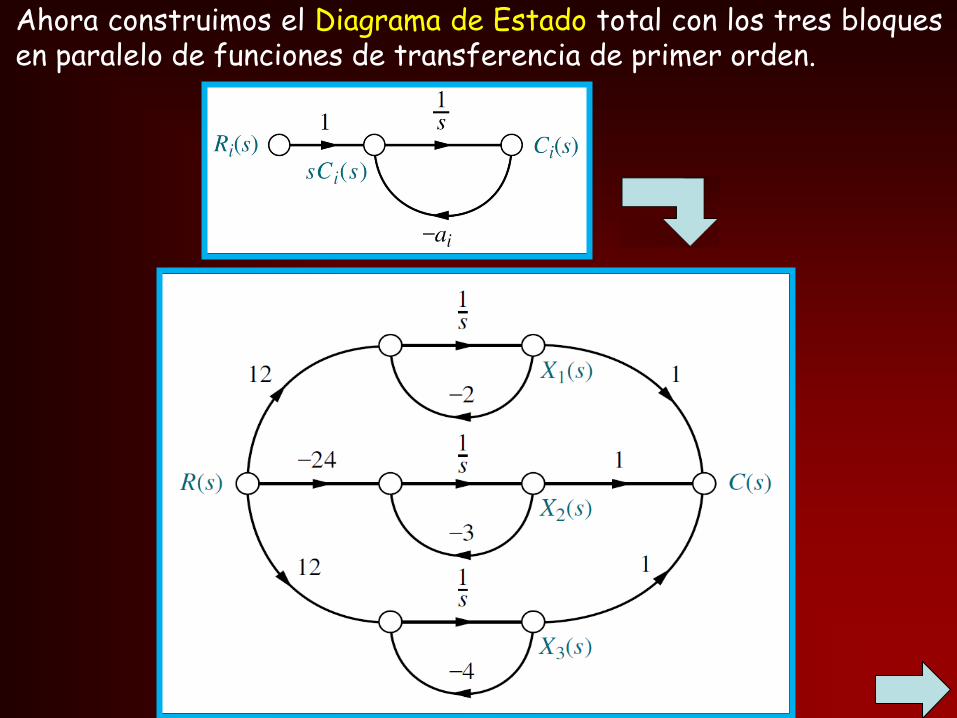
Ahora construimos el Diagrama de Estado total con los tres bloquesen paralelo de funciones de transferencia de primer orden.

Descomposición de una Función de Transferencia en Paralelo
Ahora a partir del Diagrama de Estado escribimos las ecuacionesde estado y de salida y rescribimos las ecuaciones escalares enforma matricial.
La descomposición de la función de transferencia en paralelo nuevamente nos ha llevado a la forma canónica triangular de Jordan.

MODELOS DE ESTADO
PARA
SISTEMAS INTERCONECTADOS
CONEXIÓN EN SERIE O CASCADA
CONEXIÓN EN PARALELO
CONEXIÓN EN REALIMENTACIÓN
Fernando di Sciascio (2016)
Interconexión de Modelos en Espacio de Estado
Para construir modelos en espacio de estados desistemas complejos, es necesario saber interco-nectar sistemas simples. Esta interconexión esusualmente la combinación de tres tipos básicosde estructuras:
Conexión en serie o cascada.
Conexión en paralelo.
Conexión en realimentación.
En cada uno de estos casos nos interesa obtenerun modelo en variables de estado del sistemacompleto resultante.

Interconexión de Modelos en Espacio de Estado
1 1 1 1 1
1 1 1 1 1
( ) ( ) ( )1
( ) ( ) ( )
x t A x t B u tSistema
y t C x t D u t
2 2 2 2 2
2 2 2 2 2
( ) ( ) ( )2
( ) ( ) ( )
x t A x t B u tSistema
y t C x t D u t
Para el análisis que sigue consideramos dos sistemas, definidos mediante su modelo en variables de estado:
Interconexión en Serie o Cascada
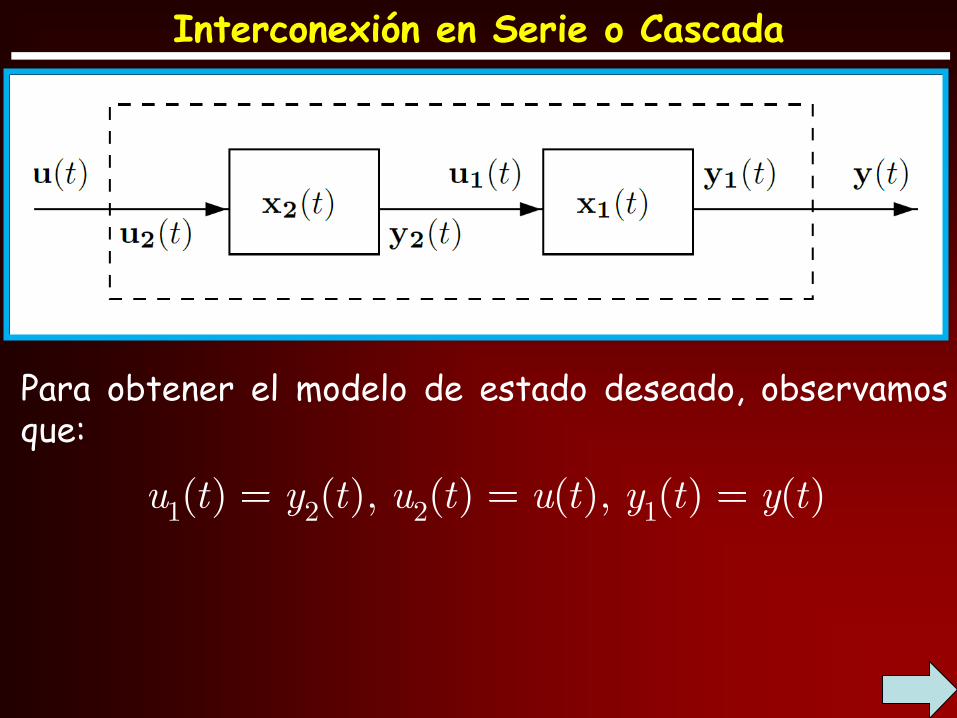
Para obtener el modelo de estado deseado, observamosque:
1 2 2 1( ) ( ), ( ) ( ), ( ) ( )u t y t u t u t y t y t

Interconexión en Serie o Cascada
2 2 2 2
1 1 1 1 1
( ) ( ) ( )
1 1 1 2 2 2
1 1 1 2 2 1 2
2 2 2 2 2 2 2 2
( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
y t C x t D u t
u t
x t A x t B u t
A x t B C x t D u t
A x t BC x t B D u t
x t A x t B u t A x t B u t
1 2 2 1( ) ( ), ( ) ( ), ( ) ( )u t y t u t u t y t y t
Escribimos la ecuación de estado para cada subsistema yreemplazamos las igualdades de arriba.

Interconexión en Serie o Cascada
Ahora escribimos la ecuación de salida para S1 yreemplazamos variables.
1 1 1 1 2 2 1 2
2 2 2 2
( ) ( ) ( ) ( )
( ) ( ) ( )
x t A x t BC x t B D u t
x t A x t B u t
2 2 2 2
1 1 1 1 1
( ) ( ) ( )
1 1 1 2 2 2
1 1 1 2 2 1 2
( ) ( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
y t C x t D u t
y t y t C x t D u t
C x t D C x t D u t
C x t DC x t D D u t

Interconexión en Serie o Cascada
Reescribiendo en forma matricial:
1 1 1 2 1 1 2
2 2 2 2
11 1 2 1 2
2
( ) ( )( )
( ) 0 ( )
( )( ) ( )
( )
x t A BC x t B Du t
x t A x t B
x ty t C DC D D u t
x t
1 1 2 1 2
2 2
1 1 2 1 2
,0
,
s s
s s
A BC B DA B
A B
C C DC D D D

clear, clc, close all
S1=ss([0 1;-4 -3],[0; 1],[1.5 1],[0])
S2=ss([-2],[1],[3],[1])
[A1,B1,C1,D1]=ssdata(S1);
[A2,B2,C2,D2]=ssdata(S2);
As=[A1 B1*C2;0 0 A2];
Bs=[B1*D2;B2]; Cs=[C1 D1*C2]; Ds=D1*D2;
serie=ss(As,Bs,Cs,Ds); serie2=series(S1,S2);
[y,t]=step(serie,4); [y2,t2]=step(serie2,4);
plot(t,y,'b','LineWidth',2)
hold on
plot(t2,y2,'or','LineWidth',2,'MarkerSize',4)
hold off
Se compara la interconexión serie que genera el comandode Matlab serie2=series(S1,S2) con el modelo teóricoserie=ss(As,Bs,Cs,Ds).
Ejemplo de interconexión serie:

Ejemplo de interconexión serie:

Interconexión en Paralelo
Para obtener el modelo equivalente de la interconexiónparalelo observamos que:
1 2 1 2( ) ( ) ( ), ( ) ( ) ( )u t u t u t y t y t y t

Interconexión en Paralelo
1 2 1 2( ) ( ) ( ), ( ) ( ) ( )u t u t u t y t y t y tEscribimos las ecuaciones de estado para cadasubsistema y la ecuación de salida utilizando lasigualdades de arriba.
1 1 1 1
2 2 2 2
1 2
1 1 2 2 1 2
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
x t A x t B u t
x t A x t B u t
y t y t y t
C x t C x t D D u t
Interconexión en Paralelo
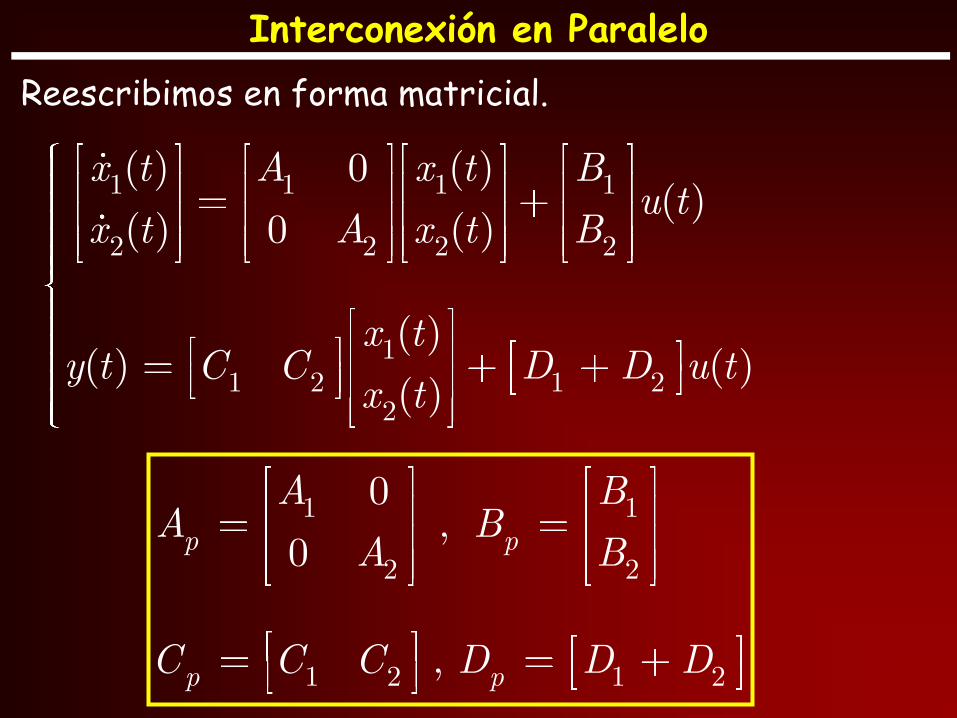
Reescribimos en forma matricial.
1 1 1 1
2 2 2 2
11 2 1 2
2
( ) 0 ( )( )
( ) 0 ( )
( )( ) ( )
( )
x t A x t Bu t
x t A x t B
x ty t C C D D u t
x t
1 1
2 2
1 2 1 2
0,
0
,
p p
p p
A BA B
A B
C C C D D D

clear, clc, close all
S1=ss([0 1;-4 -3],[0; 1],[1.5 1],[0])
S2=ss([-2],[1],[3],[1])
[A1,B1,C1,D1]=ssdata(S1);
[A2,B2,C2,D2]=ssdata(S2);
Ap=[A1 zeros(2,1);zeros(1,2) A2];Bp=[B1;B2];
Cp=[C1 C2]; Dp=D1+D2;
paralelo=ss(Ap,Bp,Cp,Dp);
paralelo2=parallel(S1,S2);
[y,t]=step(paralelo,2);
[y2,t2]=step(paralelo2,2);
plot(t,y,'b','LineWidth',2);hold on
plot(t2,y2,'or','LineWidth',2,'MarkerSize',4)
hold off
Se compara la interconexión paralelo que genera el comandode Matlab paralelo2=parallel(S1,S2) con el modeloteórico paralelo=ss(Ap,Bp,Cp,Dp).
Ejemplo de interconexión paralelo:

Ejemplo de interconexión paralelo:
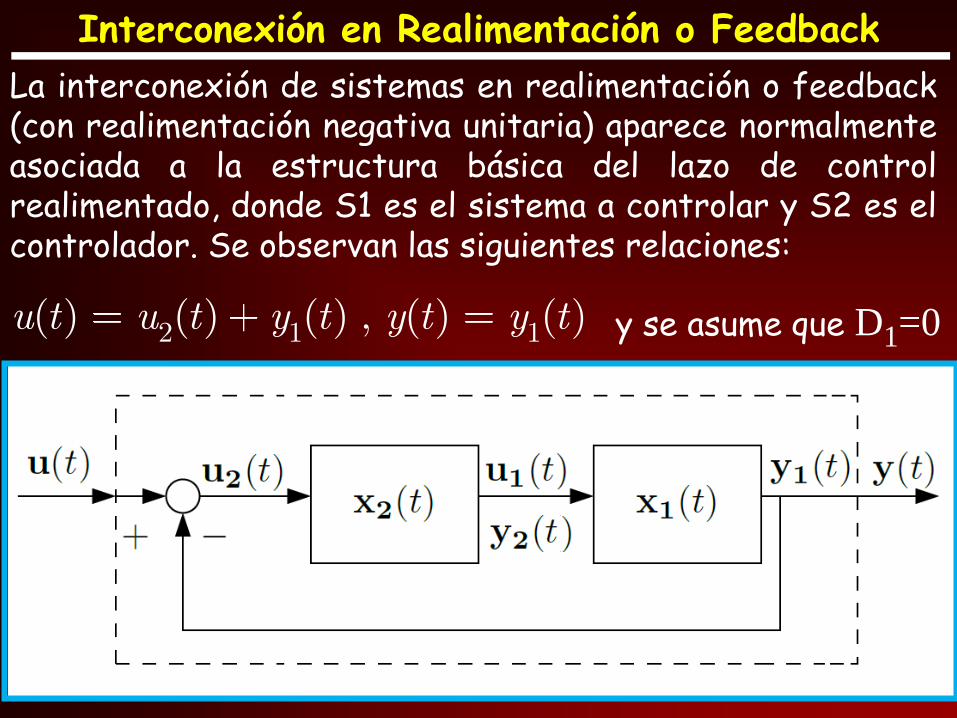
Interconexión en Realimentación o Feedback
La interconexión de sistemas en realimentación o feedback(con realimentación negativa unitaria) aparece normalmenteasociada a la estructura básica del lazo de controlrealimentado, donde S1 es el sistema a controlar y S2 es elcontrolador. Se observan las siguientes relaciones:
2 1 1( ) ( ) ( ) , ( ) ( )u t u t y t y t y t y se asume que D1=0
Interconexión en Realimentación o Feedback
1 1 1 2 1 1 2 1 1 2
2 2 1 2 2 2
11
2
( ) ( )( )
( ) ( )
( )( ) 0
( )
x t A B D C BC x t B Du t
x t B C A x t B
x ty t C
x t
1 1 2 1 1 2 1 2
2 1 2 2
1
,
0 , 0
f f
f f
A B DC BC B DA B
B C A B
C C D
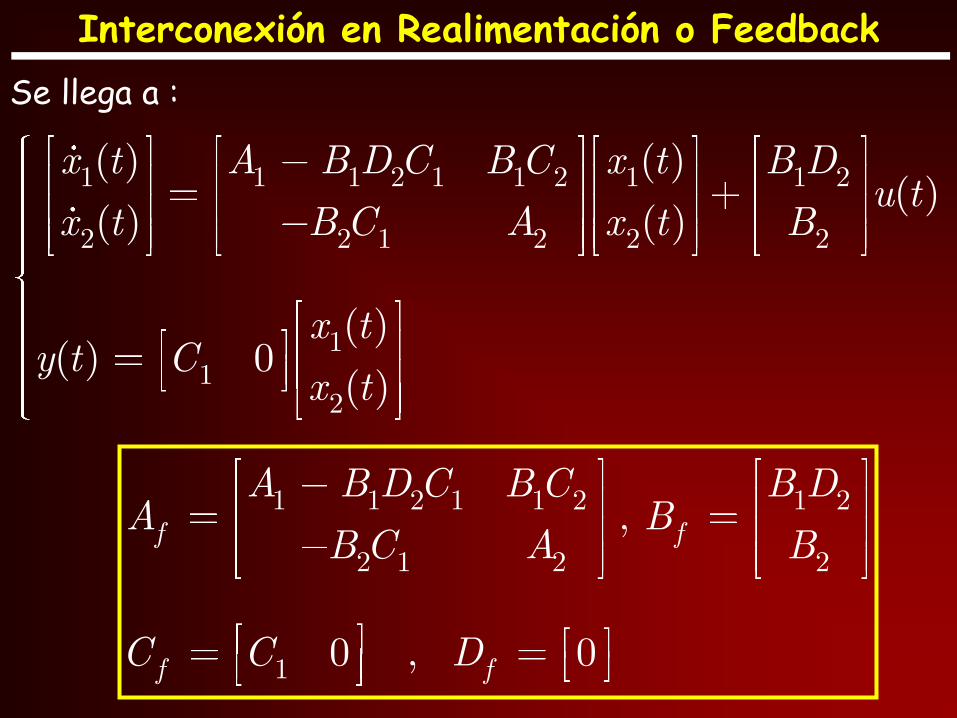
Se llega a :

clear, clc, close all
S1=ss([0 1;-4 -3],[0; 1],[1.5 1],[0])
S2=ss([-2],[1],[3],[0])
[A1,B1,C1,D1]=ssdata(S1);
[A2,B2,C2,D2]=ssdata(S2);
Af=[A1-B1*D2*C1 B1*C2;-B2*C1
A2];Bf=[B1*D2;B2];Cf=[C1 0];Df=0;
feedback_conection=ss(Af,Bf,Cf,Df);
feedback_conection2=feedback(S1*S2,1);
[y,t]=step(feedback_conection,2);
[y2,t2]=step(feedback_conection2,2);
plot(t,y,'b','LineWidth',2);hold on
plot(t2,y2,'or','LineWidth',2,'MarkerSize',4)
hold off
Se compara la interconexión feedback que genera elcomando de Matlab feedback1=feedback(S1,S2) con elmodelo teórico feedback2=ss(Af,Bf,Cf,Df).
Ejemplo de interconexión feedback:

Ejemplo de interconexión feedback:

MODELOS DUALES
Fernando di Sciascio (2016)
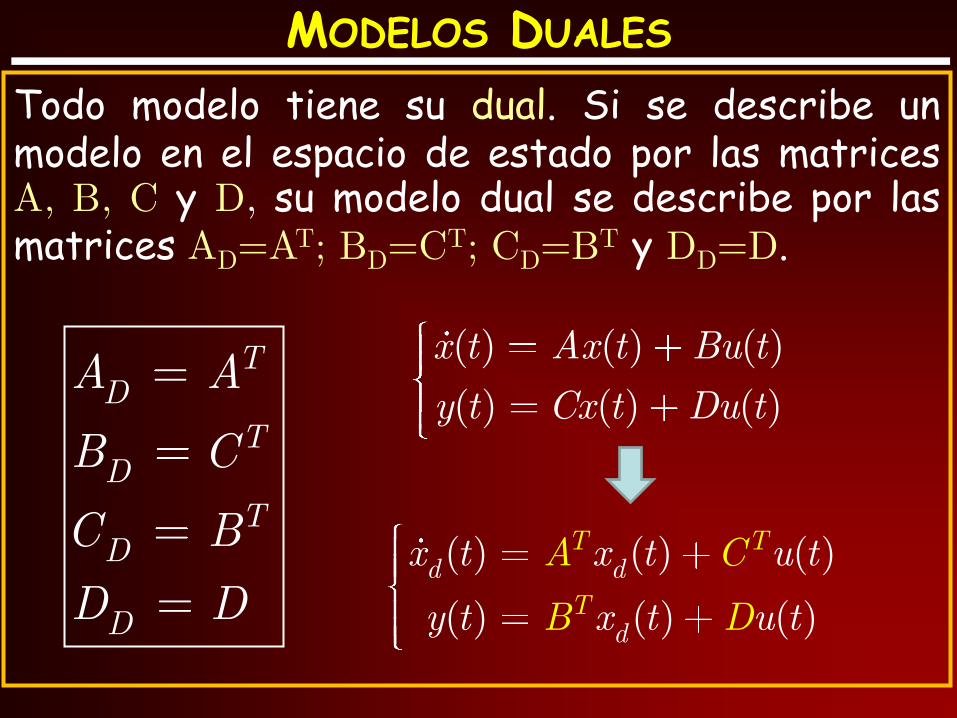
Todo modelo tiene su dual. Si se describe unmodelo en el espacio de estado por las matricesA, B, C y D, su modelo dual se describe por lasmatrices AD=AT; BD=CT; CD=BT y DD=D.
MODELOS DUALES
TD
TD
TD
D
A A
B C
C B
D D
( ) ( ) ( )
( ) ( ) ( )
x t Ax t Bu t
y t Cx t Du t
( ) ( ) ( )
( ) ( ) ( )d
Td d
T
T
x t x t u t
y t x t u t
A C
B D

Modelos Duales
Si se tiene un Diagrama de Estado del modelo originalcomo el de la figura siguiente:
Entonces el modelo dual se obtiene de la forma siguiente:

Modelos Duales
1. Se cambia el sentido de las fechas en todas lasramas.

2. Se intercambian las posiciones de Y(s) y U(s).
Modelos Duales
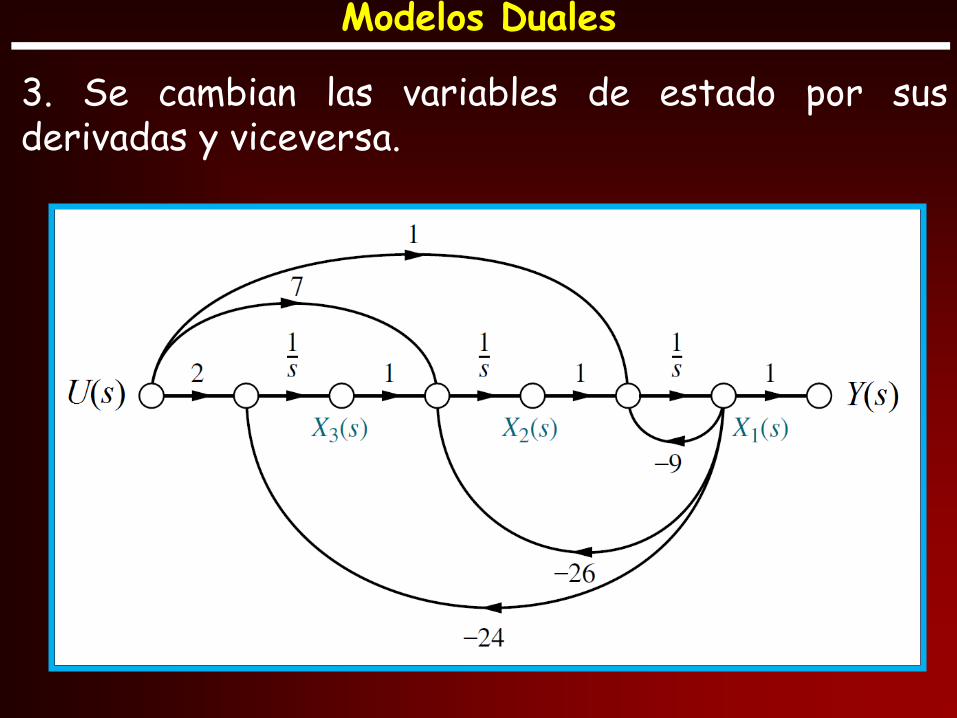
3. Se cambian las variables de estado por susderivadas y viceversa.
Modelos Duales

Las formas canónicas controlables y observables, sonformas duales (FCC1 dual de FCO1y FCC2 dualde FCO2), pues la matriz A de una forma es la
transpuesta de la otra, la B, la transpuesta de la C,
la C la transpuesta de la B, y como el sistema es
monovariable las matrices D son iguales.
Modelos Duales
Ejemplos

Modelos Duales
3 2
3 2
10 42 72: ( )
8 17 10
0 1 0 0
0 0 1 , 0 , 62 25 2 , 1
10 17 8 1
0 0 10 62
1 0 17 , 25 , 0 0 1 ,
0 1
1
1
8 2
cc cc cc cc
co co co
s s sEjemplo G s
s s s
A B C
FCC
O
D
A B C
FC
1coD

Modelos Duales
3 2
3 2
10 42 72: ( )
8 17 10
8 17 10 1
1 0 0 , 0 , 2 25 62 , 1
0 1 0 0
8 1 0 2
17 0 1 , 25 , 1 0 0 ,
1 0
2
0 2
2
0 6
cc cc cc cc
co co co
s s sEjemplo G s
s s s
FCC
A B C D
A B C
FCO
1coD